
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公2023年 12卷 第3期
 上一期
上一期
2023, 12(3): 471-499.
 摘要
摘要 3798KB
3798KB
摘要:
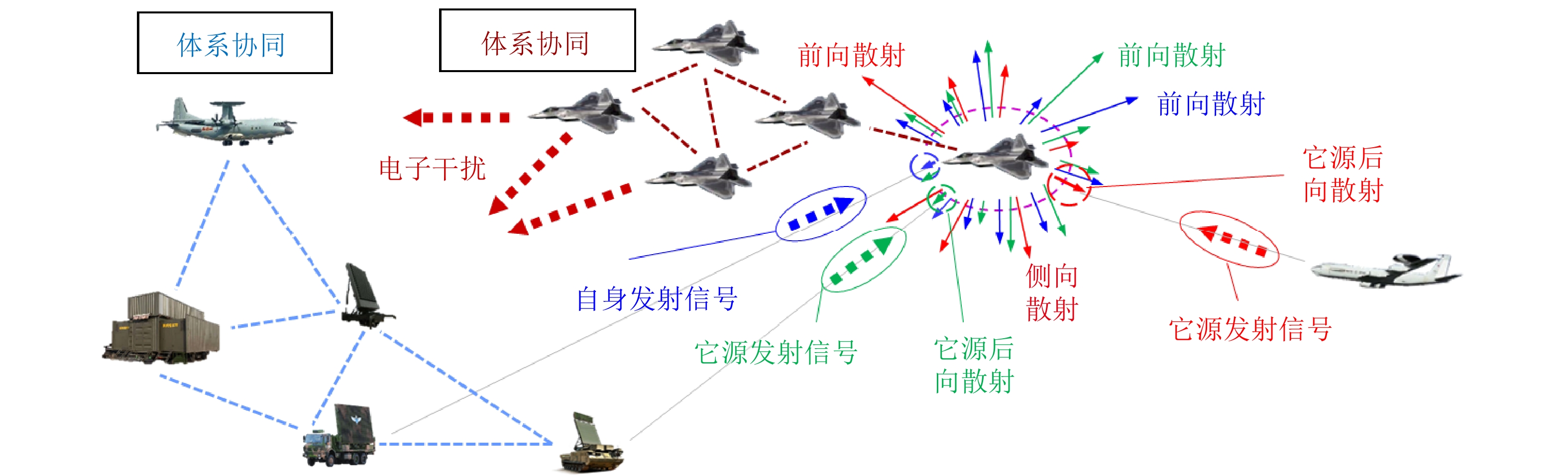
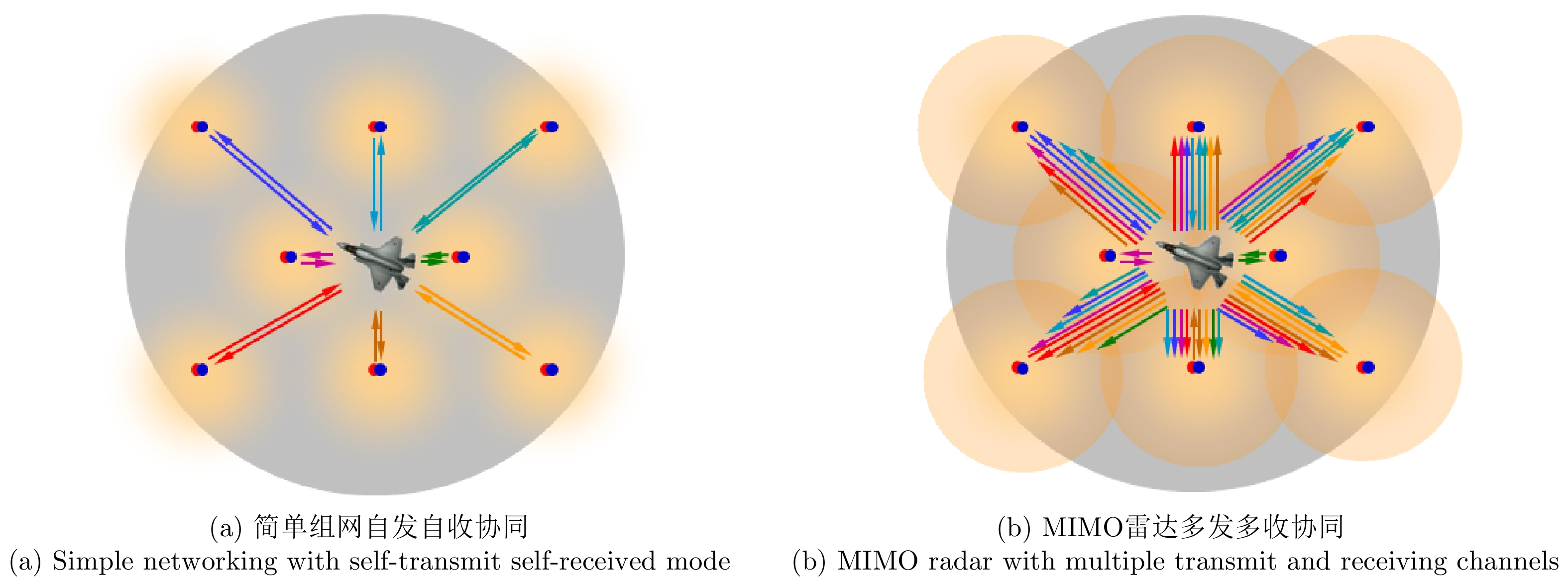
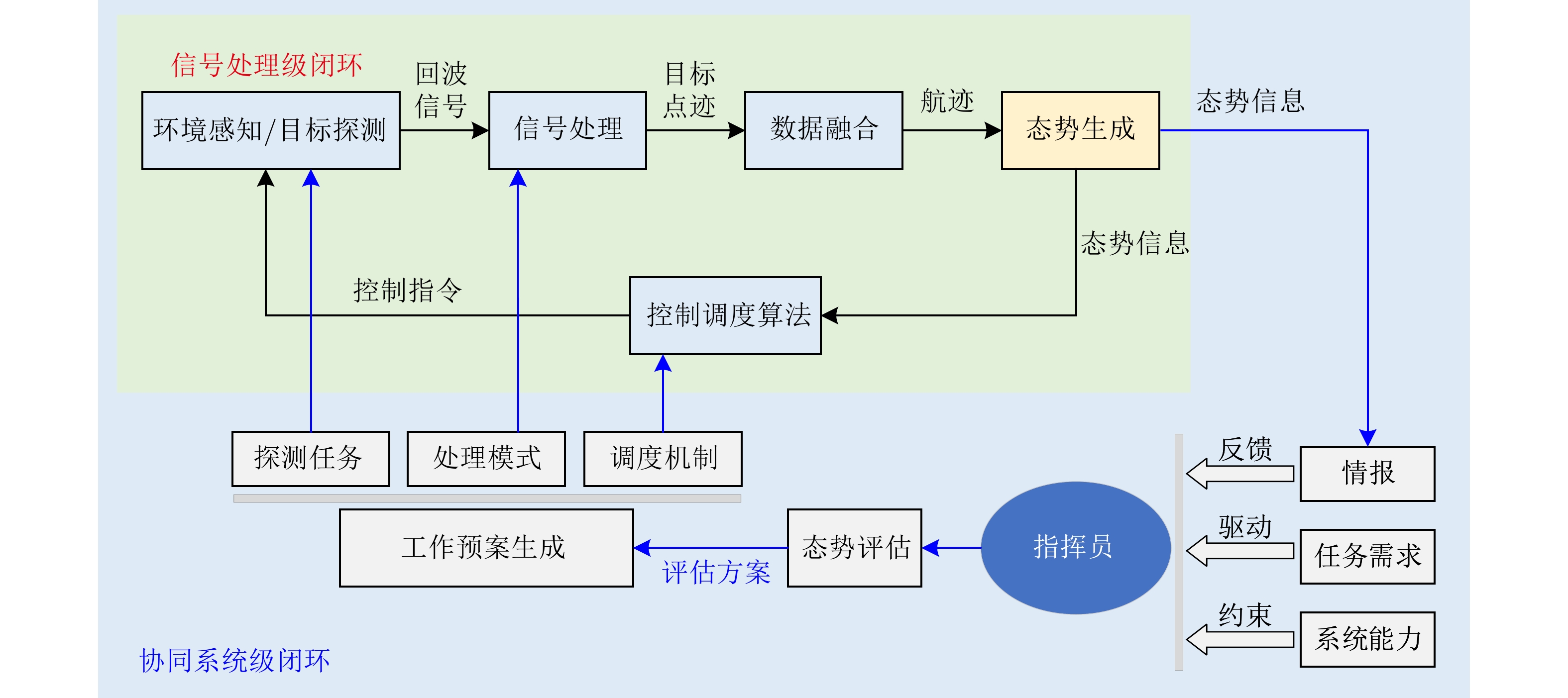
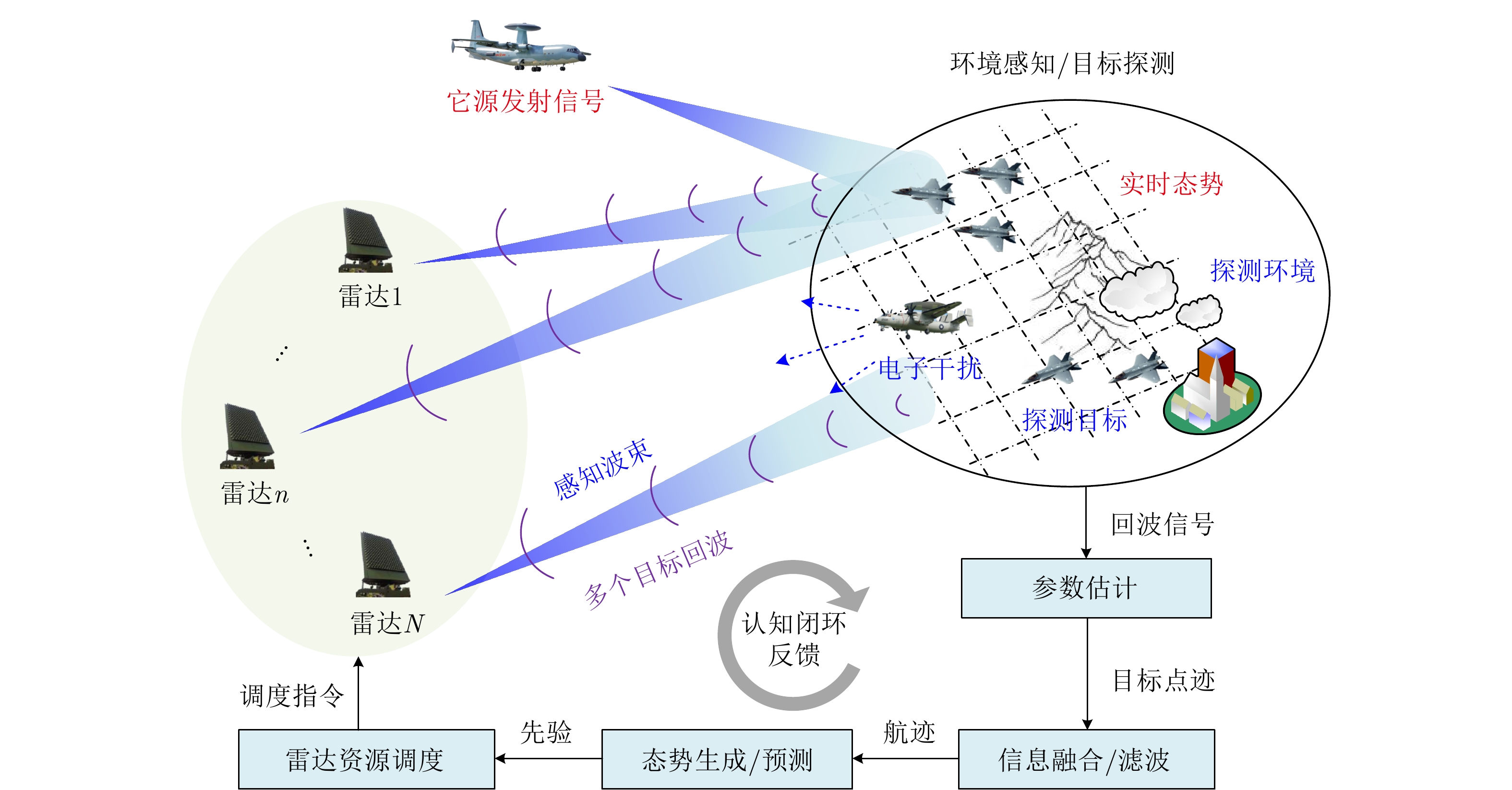
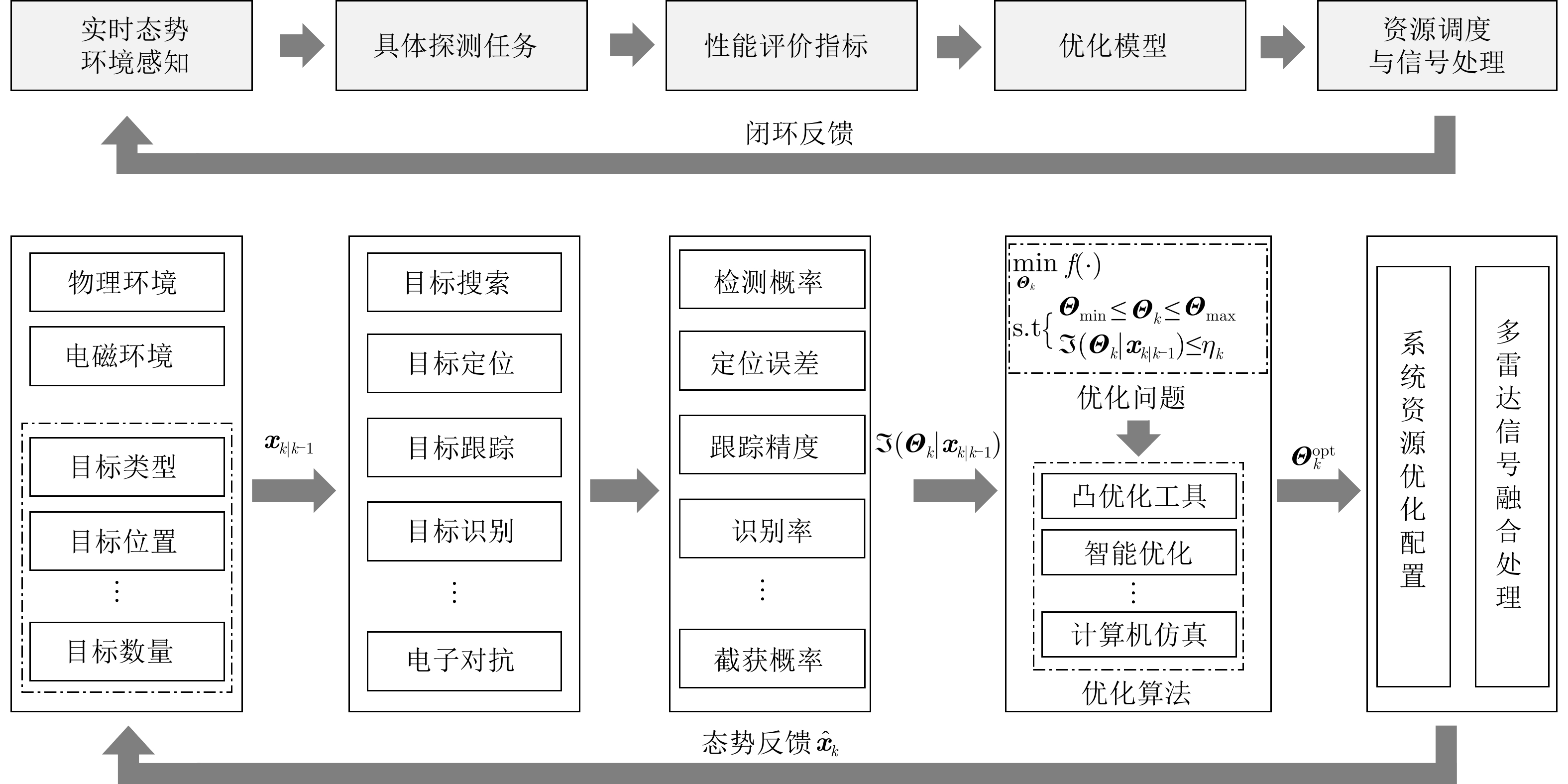
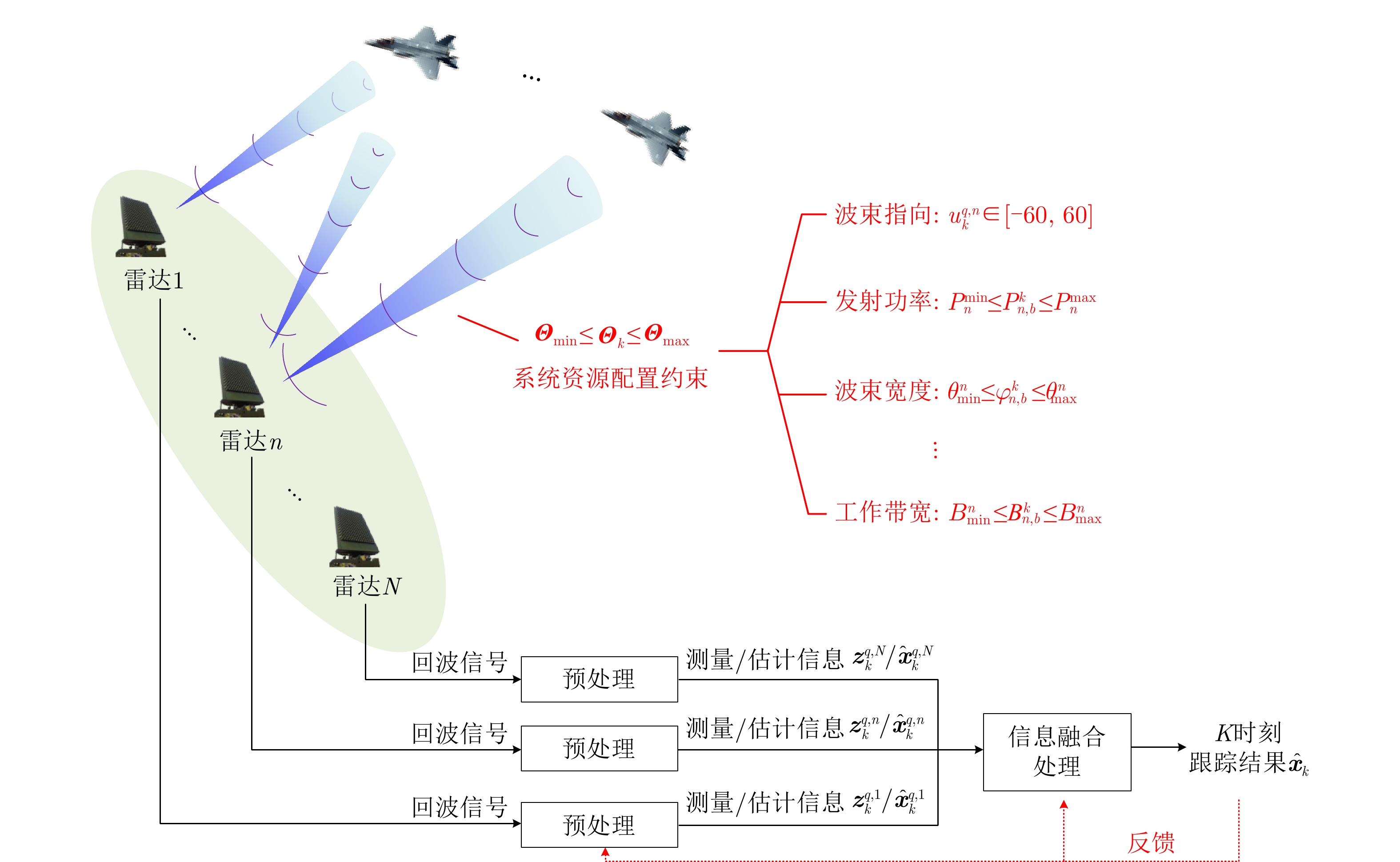
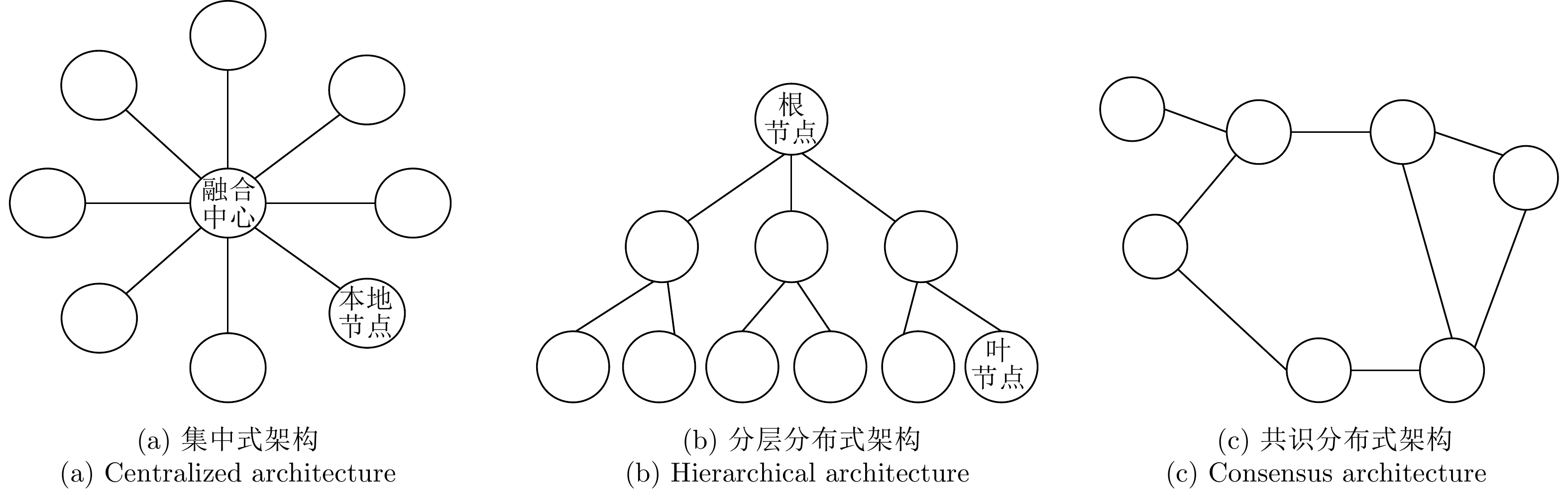
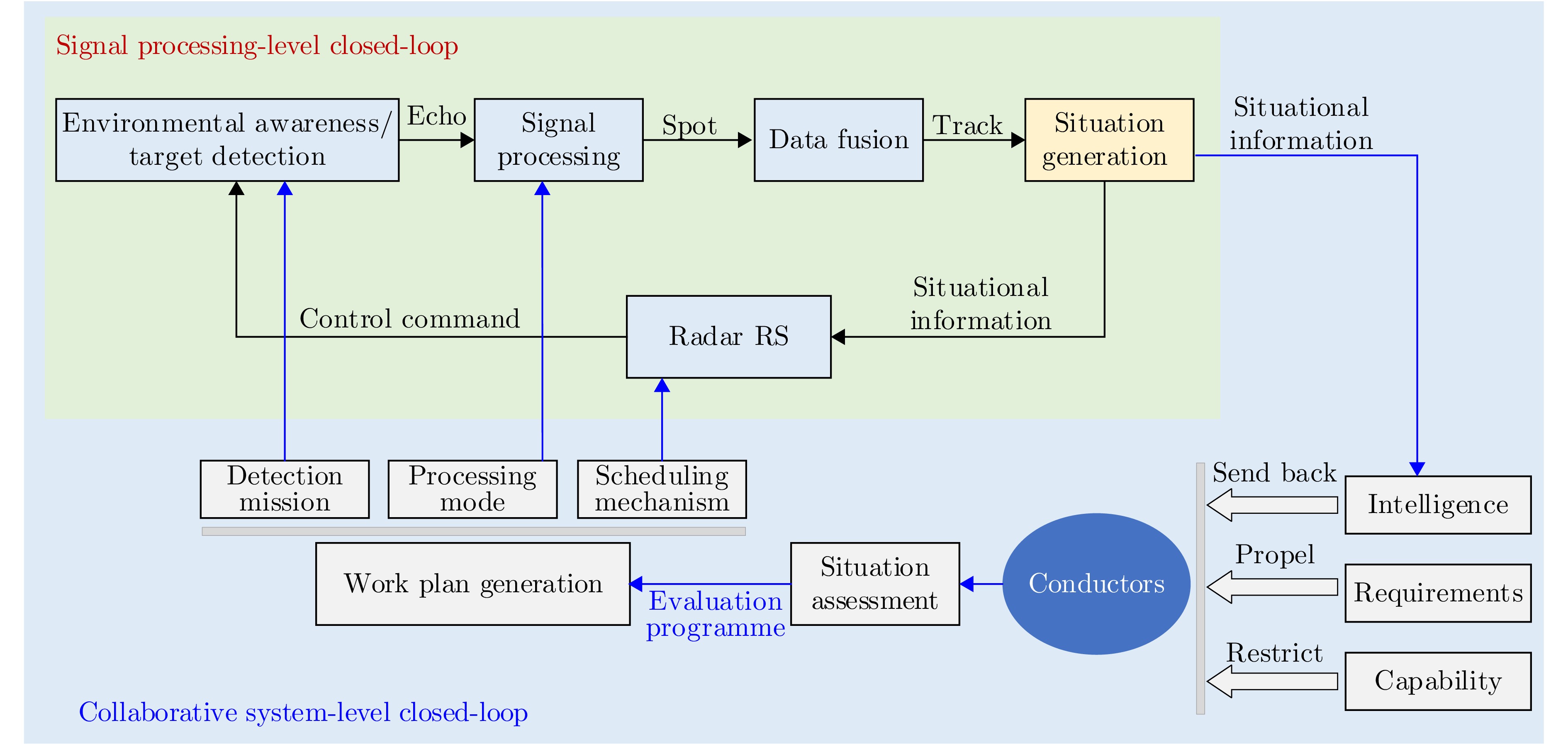
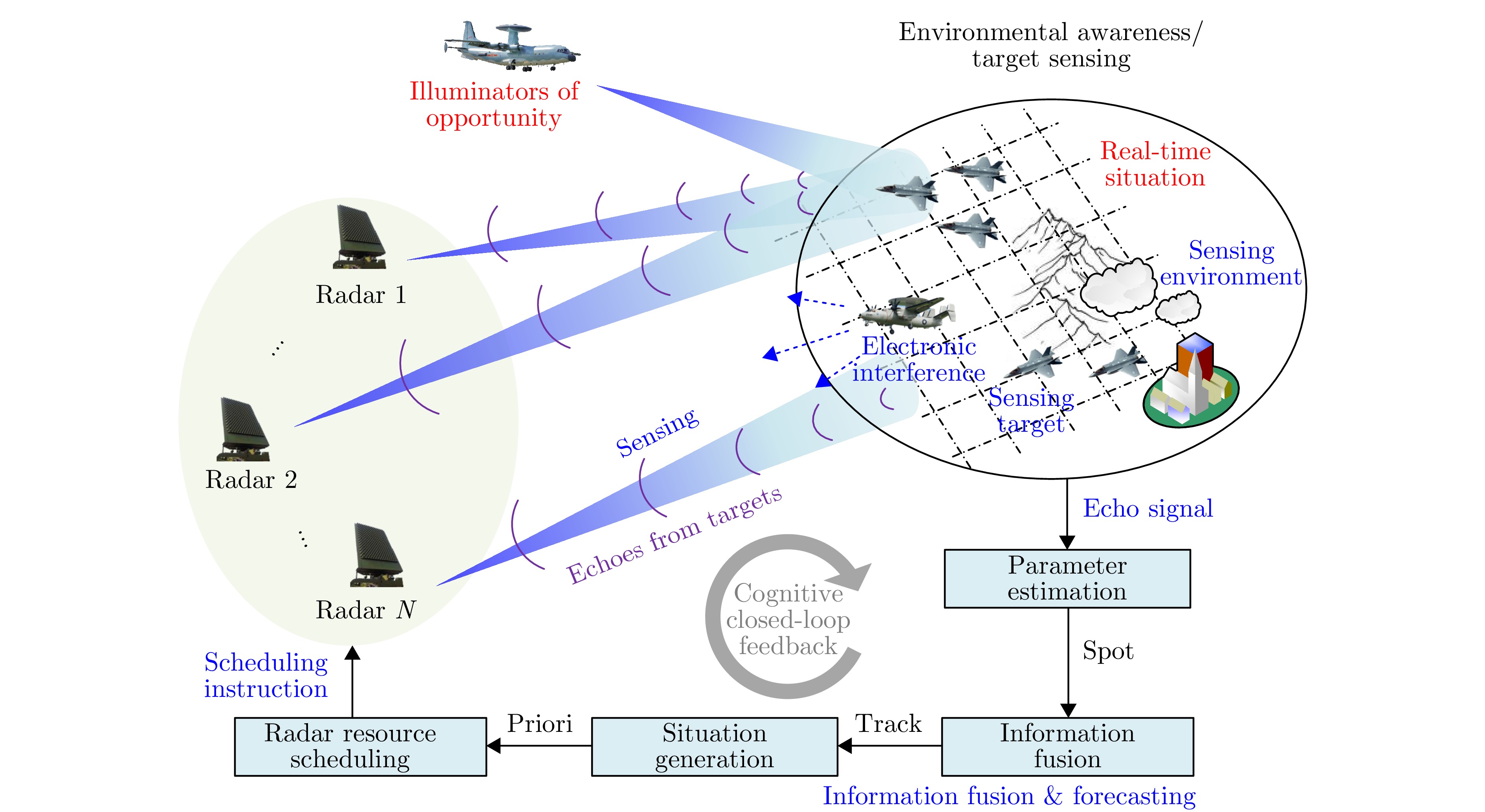
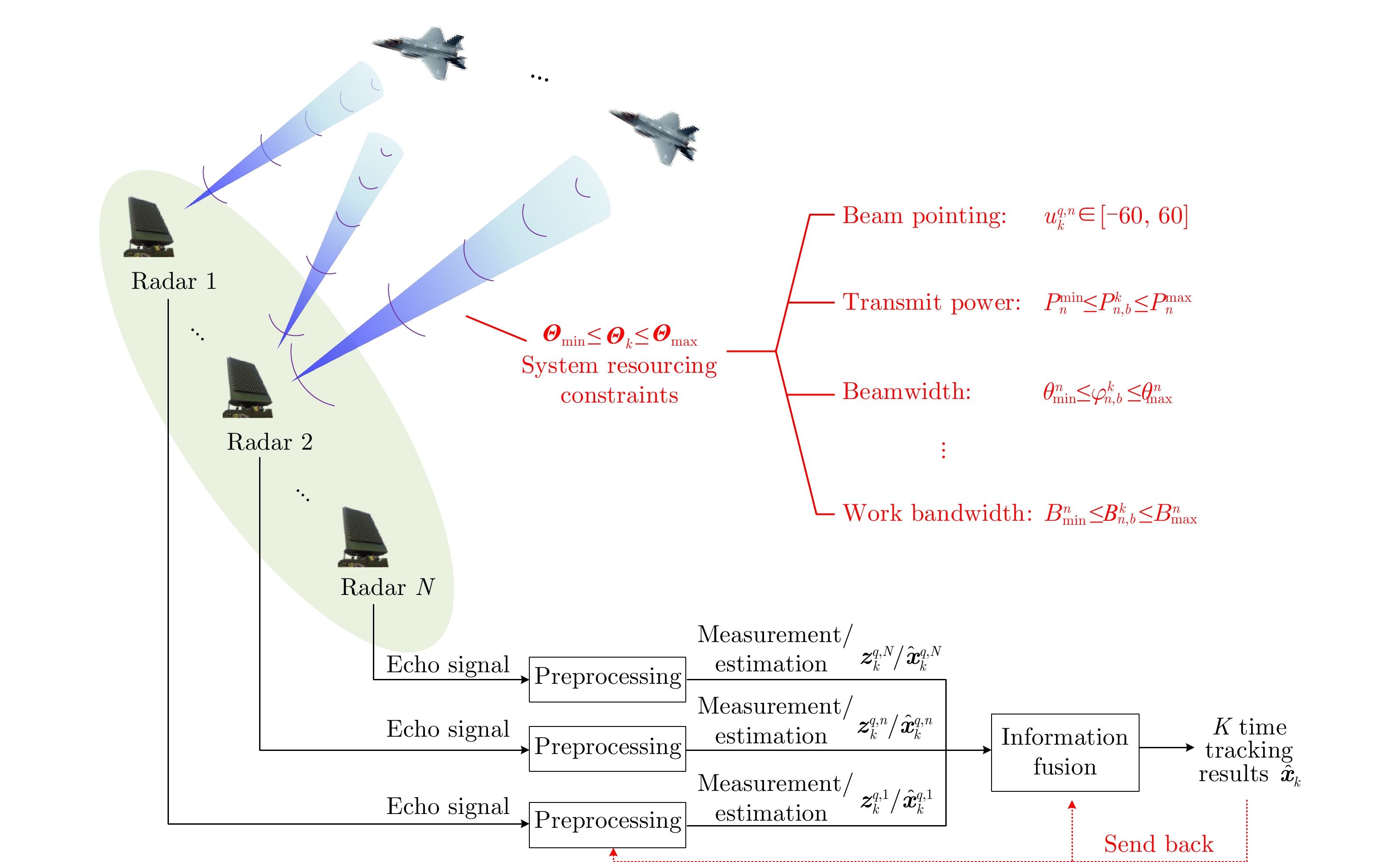
多雷达协同探测技术通过有机地联动多部雷达,形成广域分布的探测构型,可充分获取空间、频率分集等探测增益,显著提升雷达系统的目标探测性能和电磁干扰环境顽存能力,是雷达技术领域重点发展的方向之一。近年来,国内外针对多雷达协同探测技术开展了广泛研究,在系统架构设计、信号处理、资源调度等技术方向积累了诸多研究成果。该文首先总结了多雷达协同探测技术的概念内涵,阐述了其基于信号处理闭环反馈的协同机制,分析了其实现过程中所面临的技术挑战;随后,聚焦于认知跟踪与资源调度算法,从内涵特点、系统构成、跟踪模型、信息融合、性能评估、调度算法、优化准则、认知流程等方面进行了技术总结,并分析了协同认知跟踪及其与系统资源调度的关系;接着从雷达资源要素、信息融合架构、跟踪性能指标、资源调度模型、复杂任务场景5个方面梳理和总结了协同认知跟踪与资源调度算法近年来的研究进展;最后总结全文并展望了该领域未来技术的发展趋势,旨在为后续的相关技术研究提供参考。 多雷达协同探测技术通过有机地联动多部雷达,形成广域分布的探测构型,可充分获取空间、频率分集等探测增益,显著提升雷达系统的目标探测性能和电磁干扰环境顽存能力,是雷达技术领域重点发展的方向之一。近年来,国内外针对多雷达协同探测技术开展了广泛研究,在系统架构设计、信号处理、资源调度等技术方向积累了诸多研究成果。该文首先总结了多雷达协同探测技术的概念内涵,阐述了其基于信号处理闭环反馈的协同机制,分析了其实现过程中所面临的技术挑战;随后,聚焦于认知跟踪与资源调度算法,从内涵特点、系统构成、跟踪模型、信息融合、性能评估、调度算法、优化准则、认知流程等方面进行了技术总结,并分析了协同认知跟踪及其与系统资源调度的关系;接着从雷达资源要素、信息融合架构、跟踪性能指标、资源调度模型、复杂任务场景5个方面梳理和总结了协同认知跟踪与资源调度算法近年来的研究进展;最后总结全文并展望了该领域未来技术的发展趋势,旨在为后续的相关技术研究提供参考。
多雷达协同探测技术通过有机地联动多部雷达,形成广域分布的探测构型,可充分获取空间、频率分集等探测增益,显著提升雷达系统的目标探测性能和电磁干扰环境顽存能力,是雷达技术领域重点发展的方向之一。近年来,国内外针对多雷达协同探测技术开展了广泛研究,在系统架构设计、信号处理、资源调度等技术方向积累了诸多研究成果。该文首先总结了多雷达协同探测技术的概念内涵,阐述了其基于信号处理闭环反馈的协同机制,分析了其实现过程中所面临的技术挑战;随后,聚焦于认知跟踪与资源调度算法,从内涵特点、系统构成、跟踪模型、信息融合、性能评估、调度算法、优化准则、认知流程等方面进行了技术总结,并分析了协同认知跟踪及其与系统资源调度的关系;接着从雷达资源要素、信息融合架构、跟踪性能指标、资源调度模型、复杂任务场景5个方面梳理和总结了协同认知跟踪与资源调度算法近年来的研究进展;最后总结全文并展望了该领域未来技术的发展趋势,旨在为后续的相关技术研究提供参考。 多雷达协同探测技术通过有机地联动多部雷达,形成广域分布的探测构型,可充分获取空间、频率分集等探测增益,显著提升雷达系统的目标探测性能和电磁干扰环境顽存能力,是雷达技术领域重点发展的方向之一。近年来,国内外针对多雷达协同探测技术开展了广泛研究,在系统架构设计、信号处理、资源调度等技术方向积累了诸多研究成果。该文首先总结了多雷达协同探测技术的概念内涵,阐述了其基于信号处理闭环反馈的协同机制,分析了其实现过程中所面临的技术挑战;随后,聚焦于认知跟踪与资源调度算法,从内涵特点、系统构成、跟踪模型、信息融合、性能评估、调度算法、优化准则、认知流程等方面进行了技术总结,并分析了协同认知跟踪及其与系统资源调度的关系;接着从雷达资源要素、信息融合架构、跟踪性能指标、资源调度模型、复杂任务场景5个方面梳理和总结了协同认知跟踪与资源调度算法近年来的研究进展;最后总结全文并展望了该领域未来技术的发展趋势,旨在为后续的相关技术研究提供参考。













2023, 12(3): 500-515.
摘要:
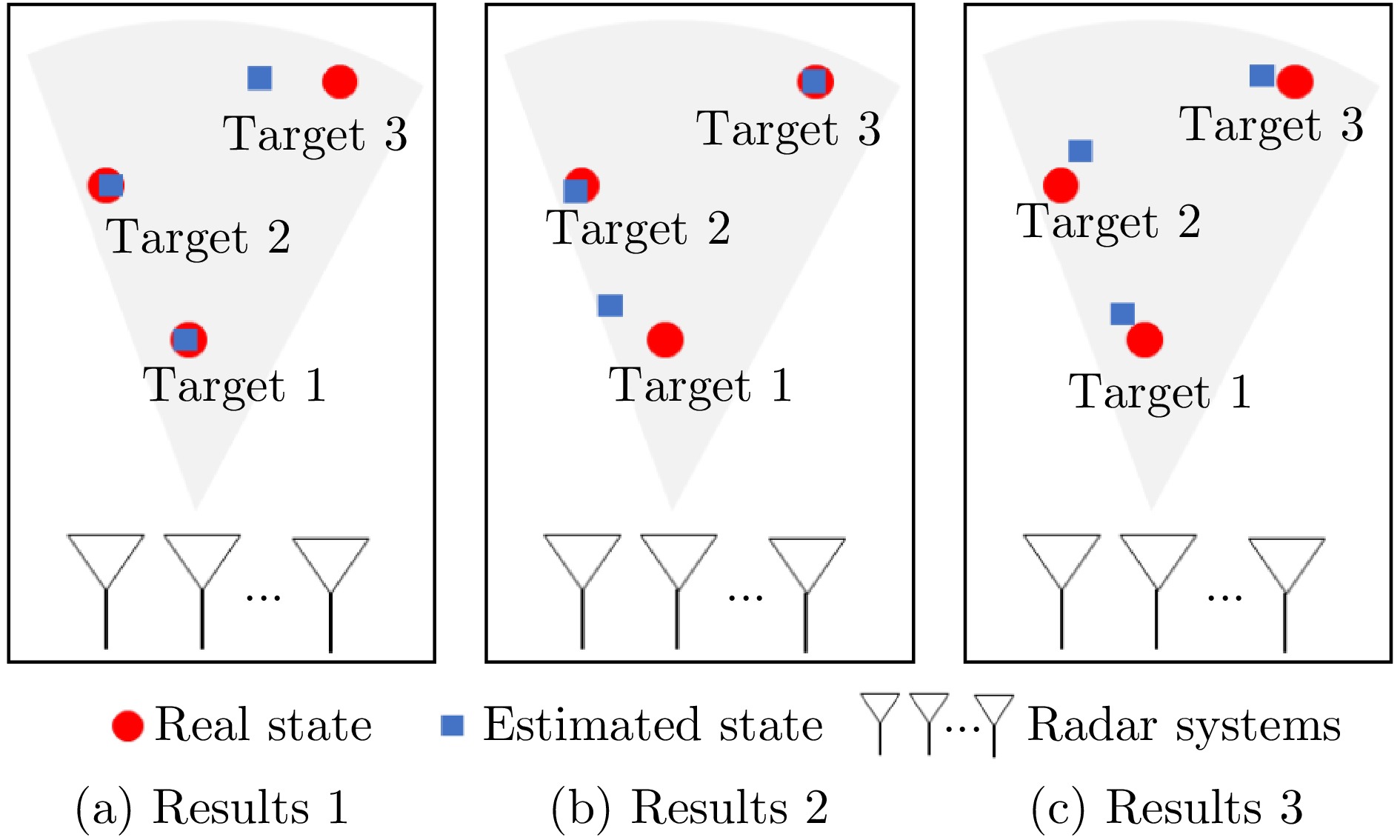
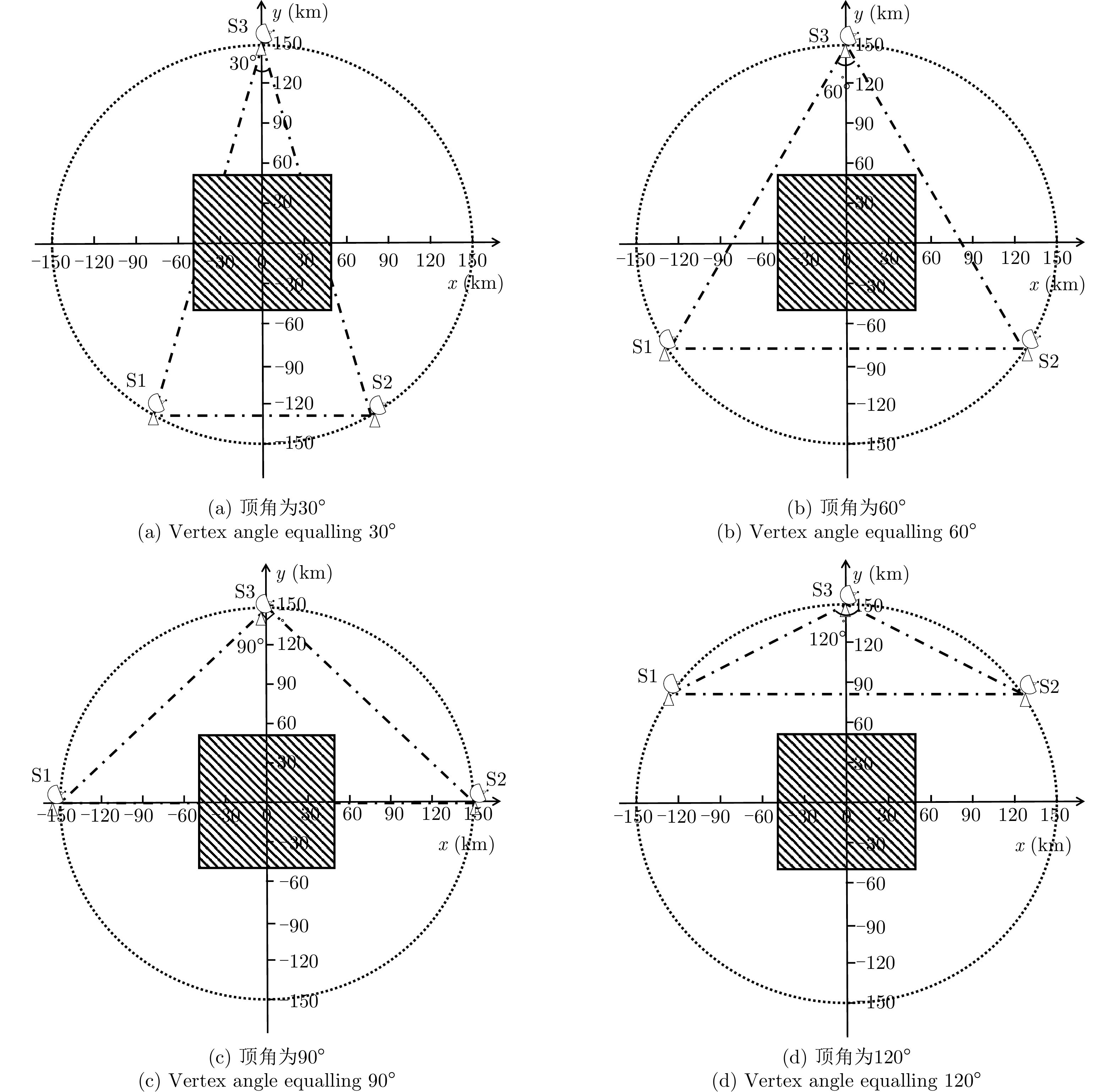
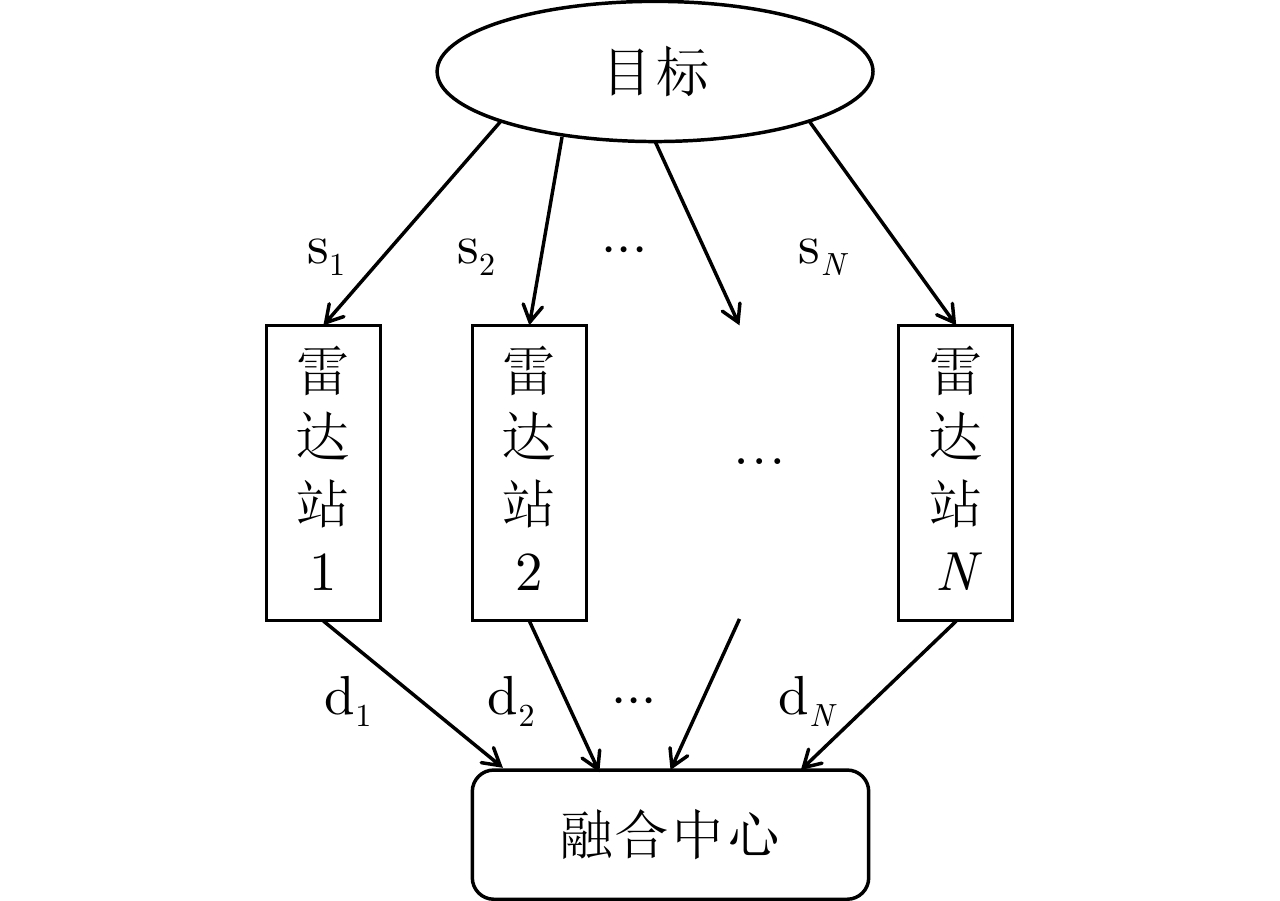
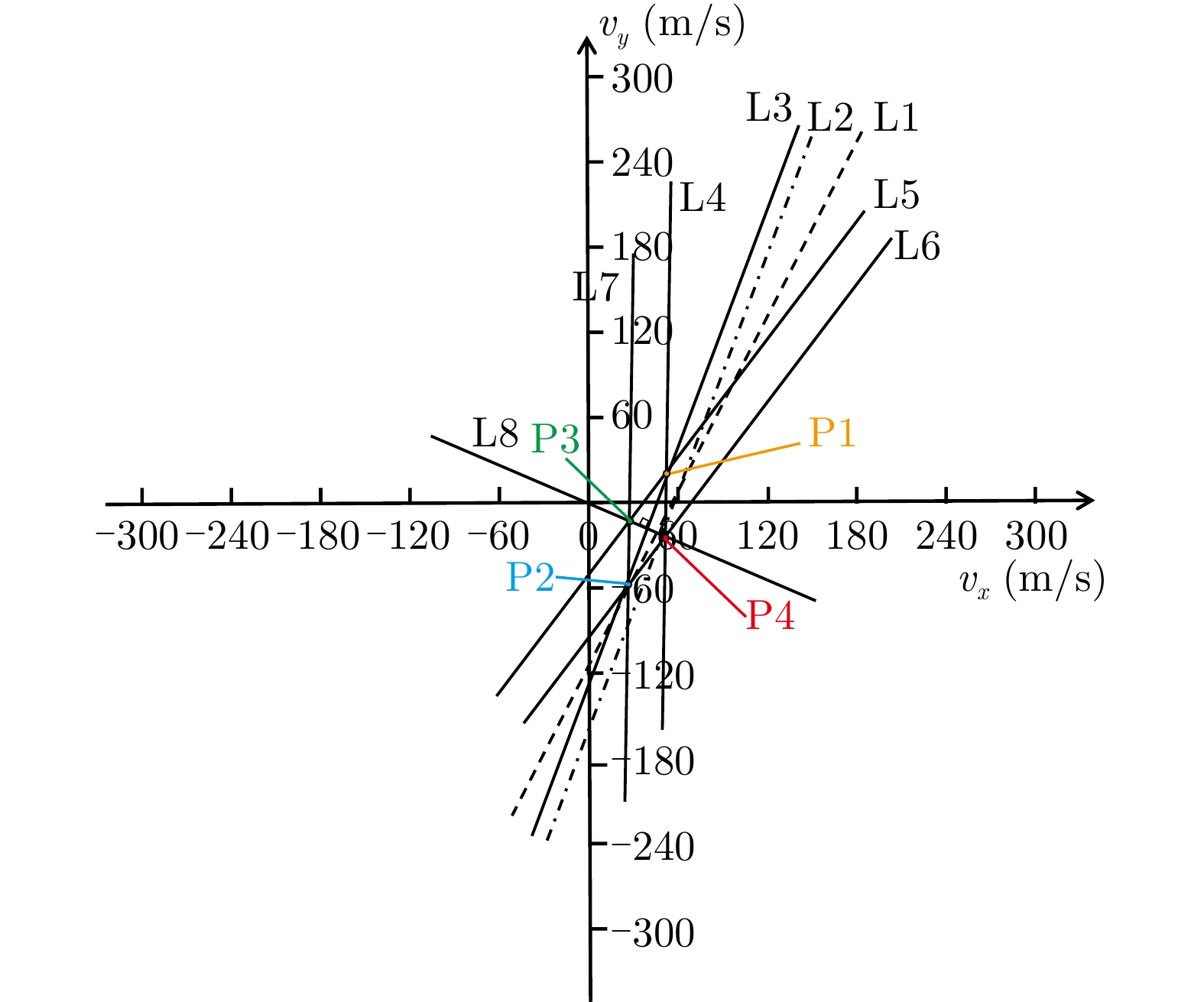
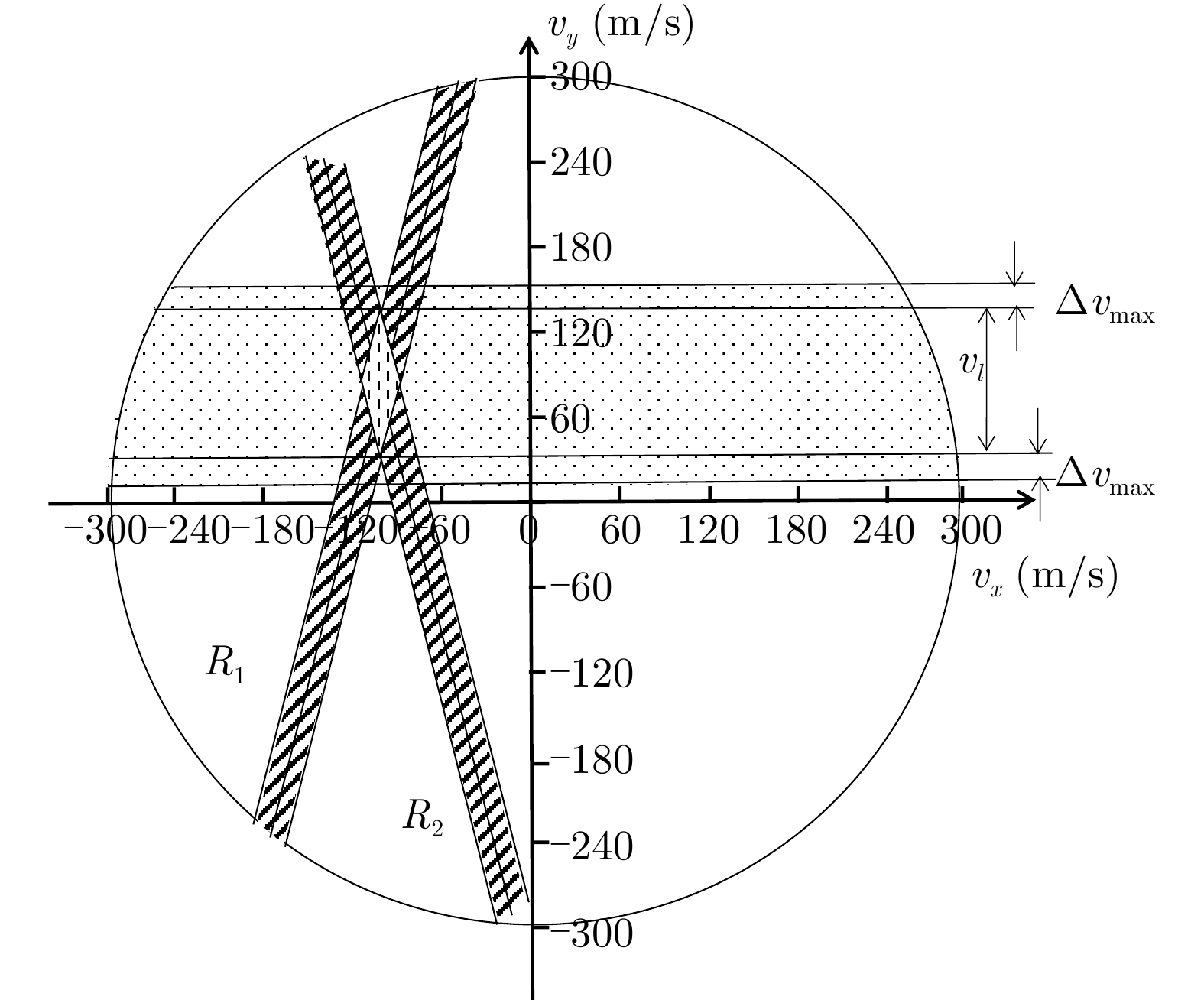
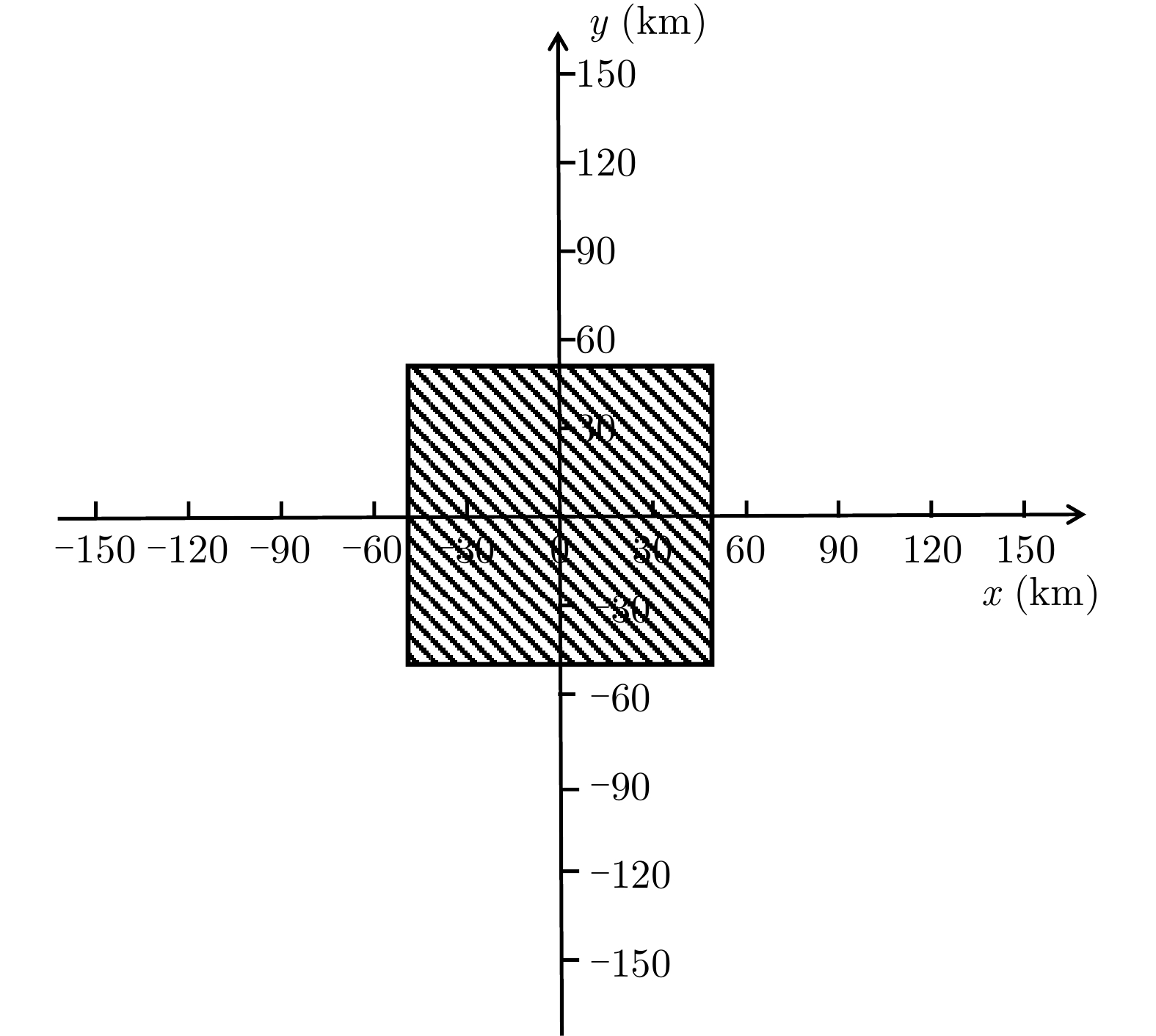
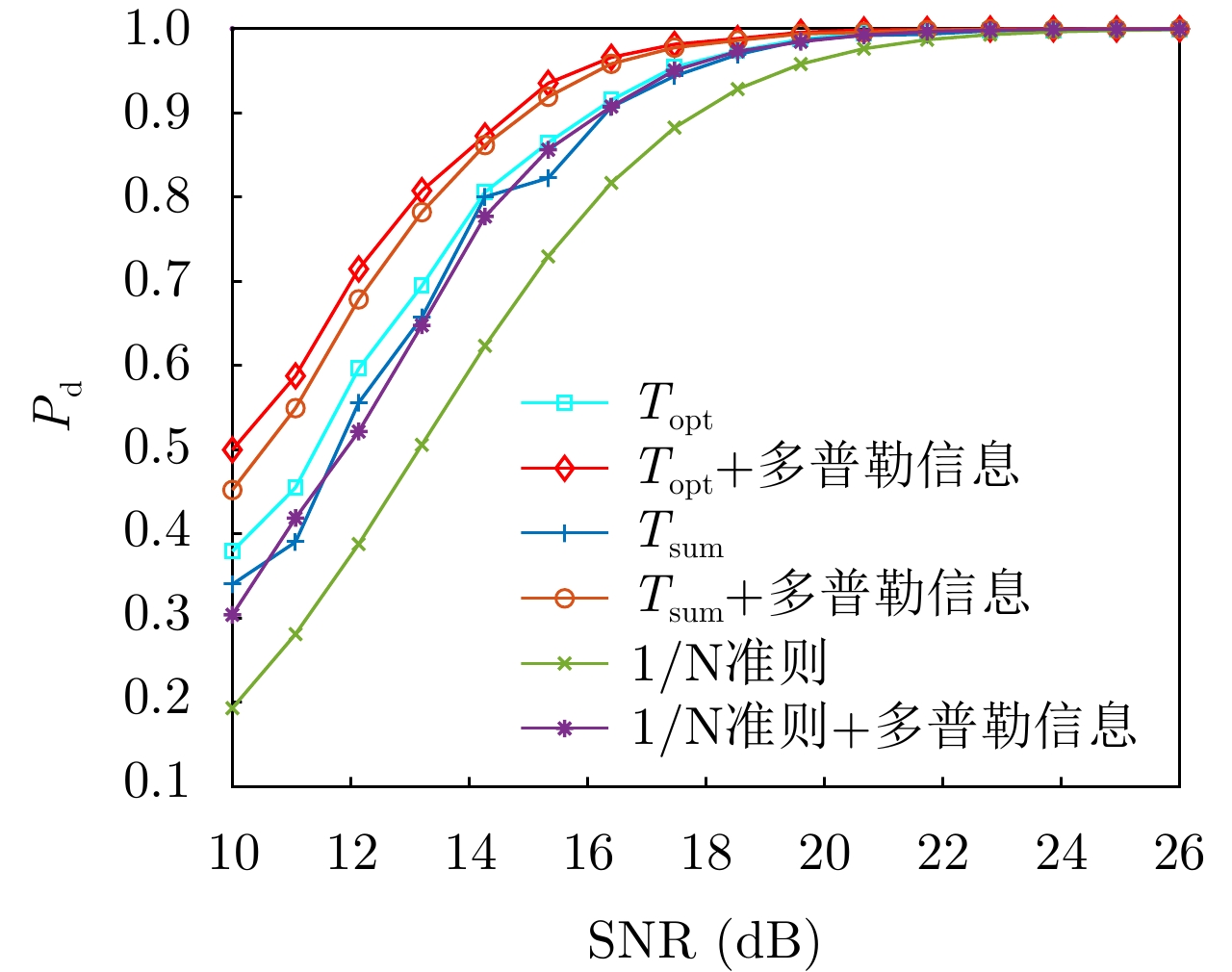
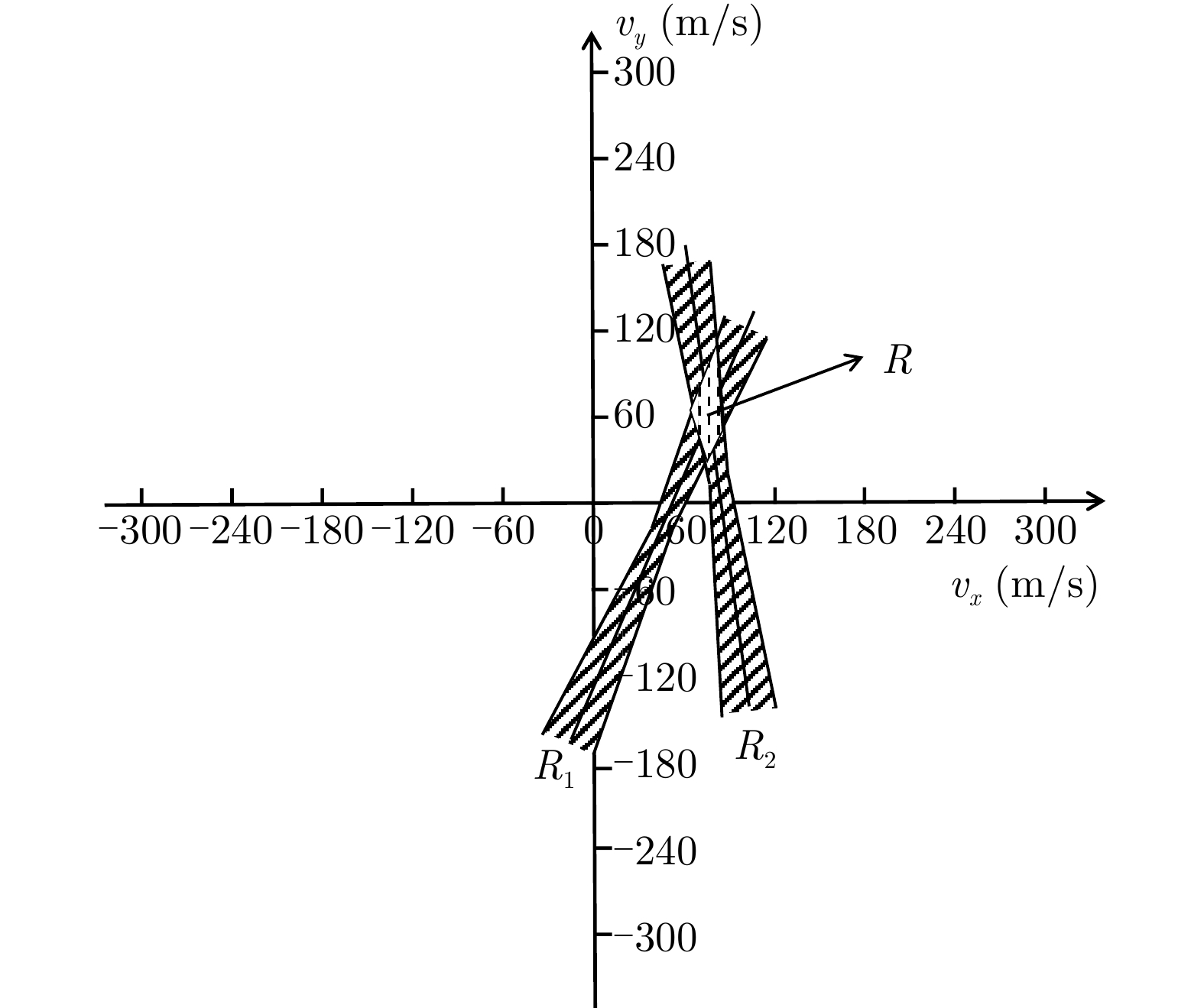
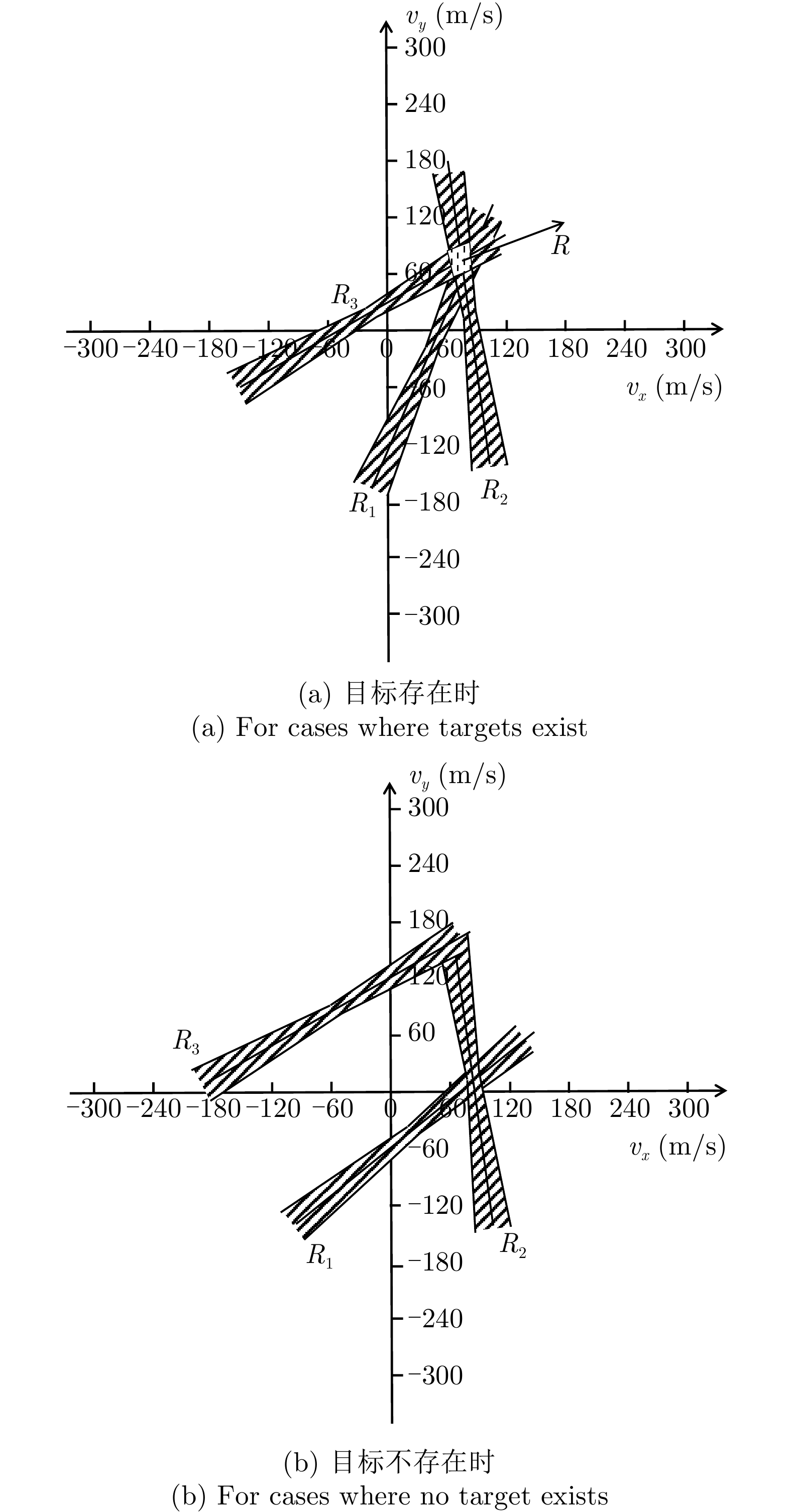
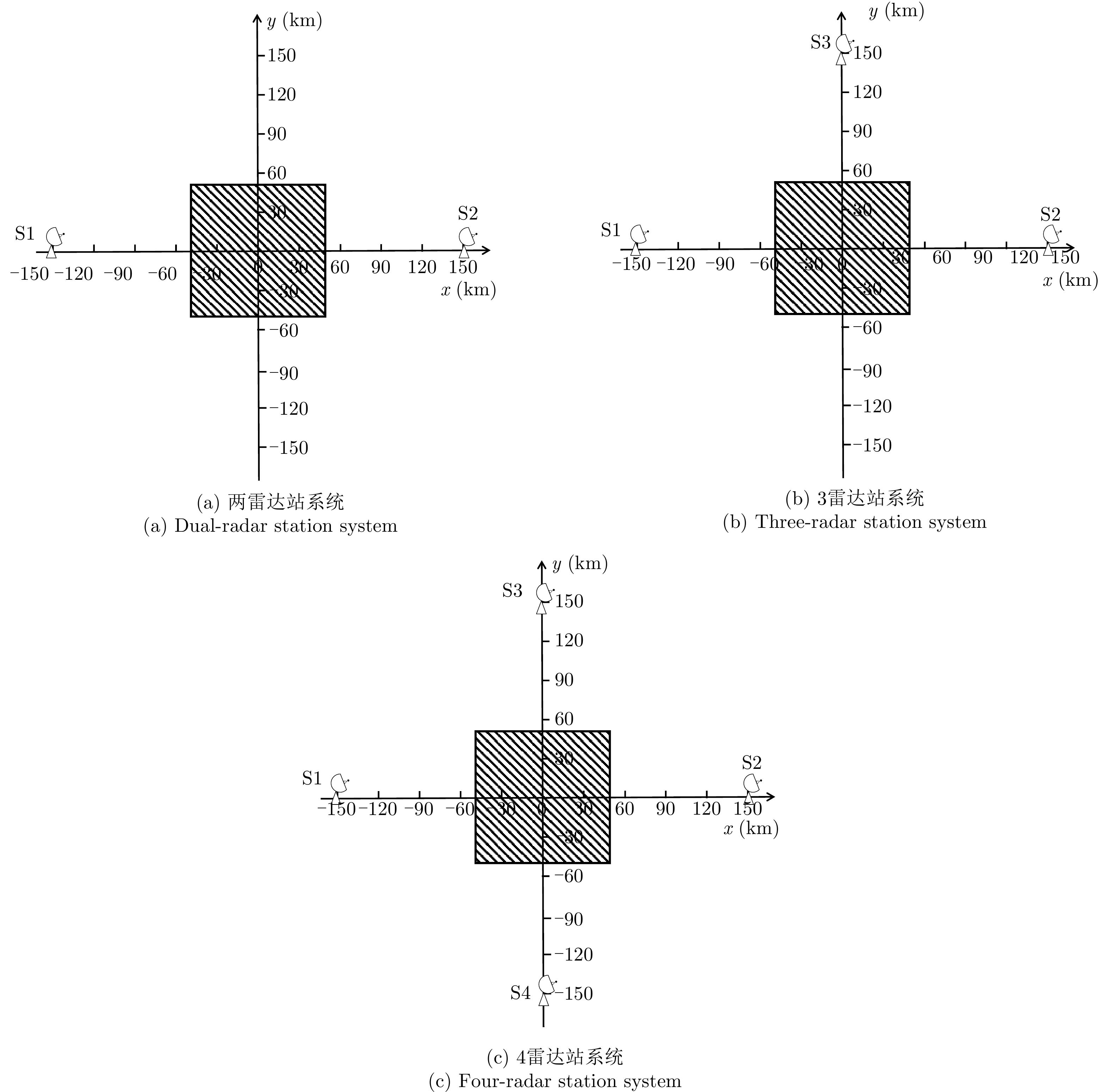
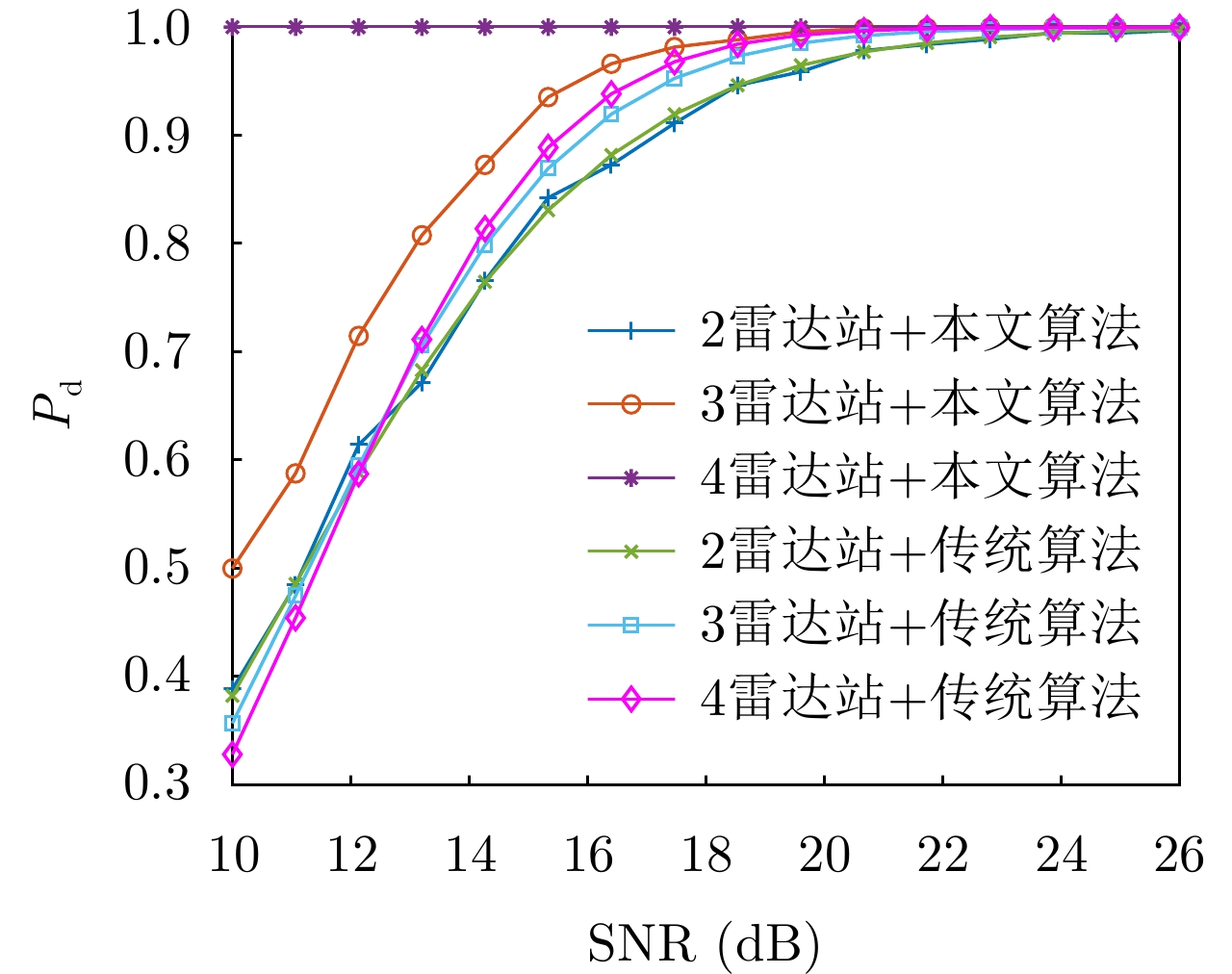
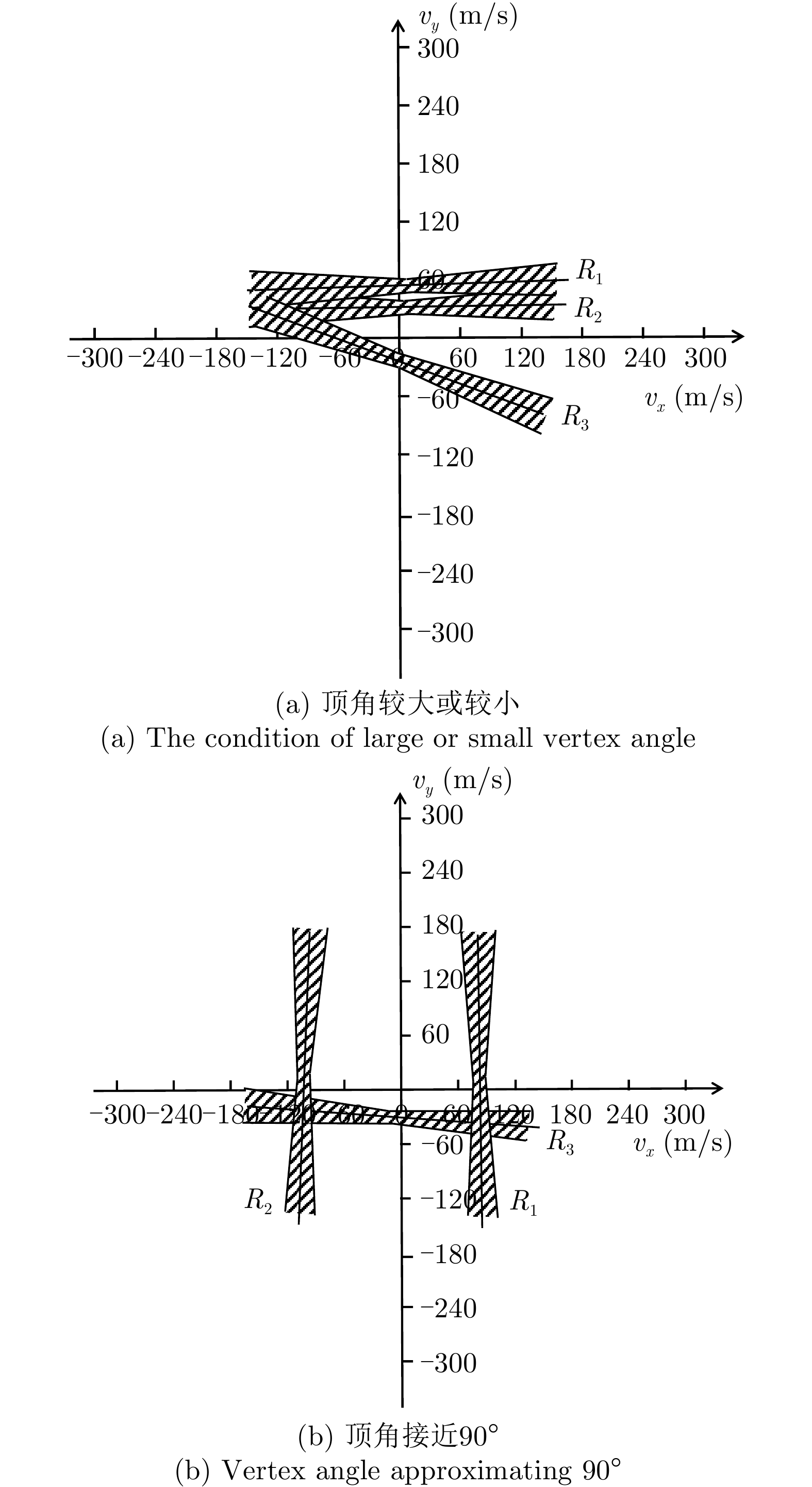
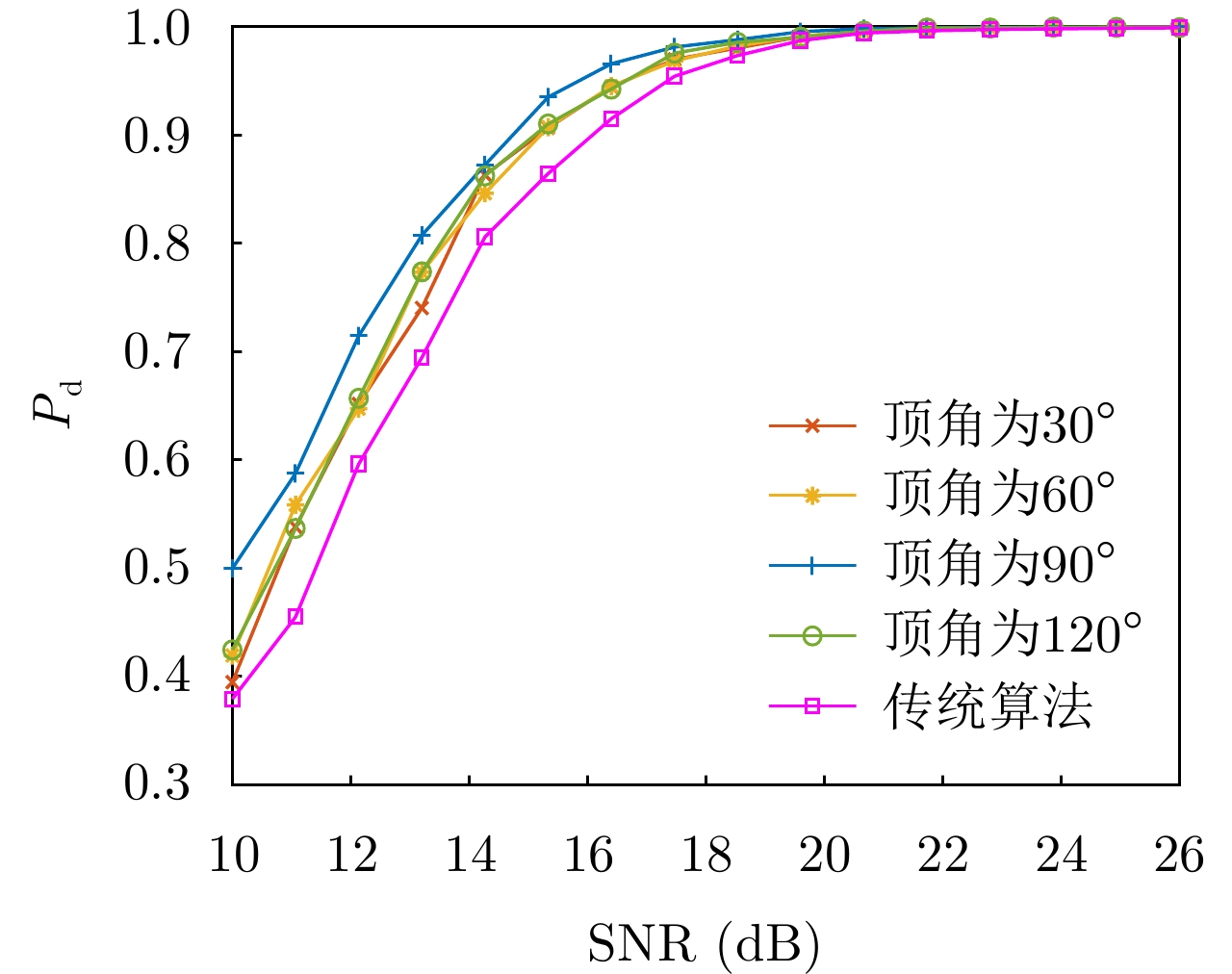
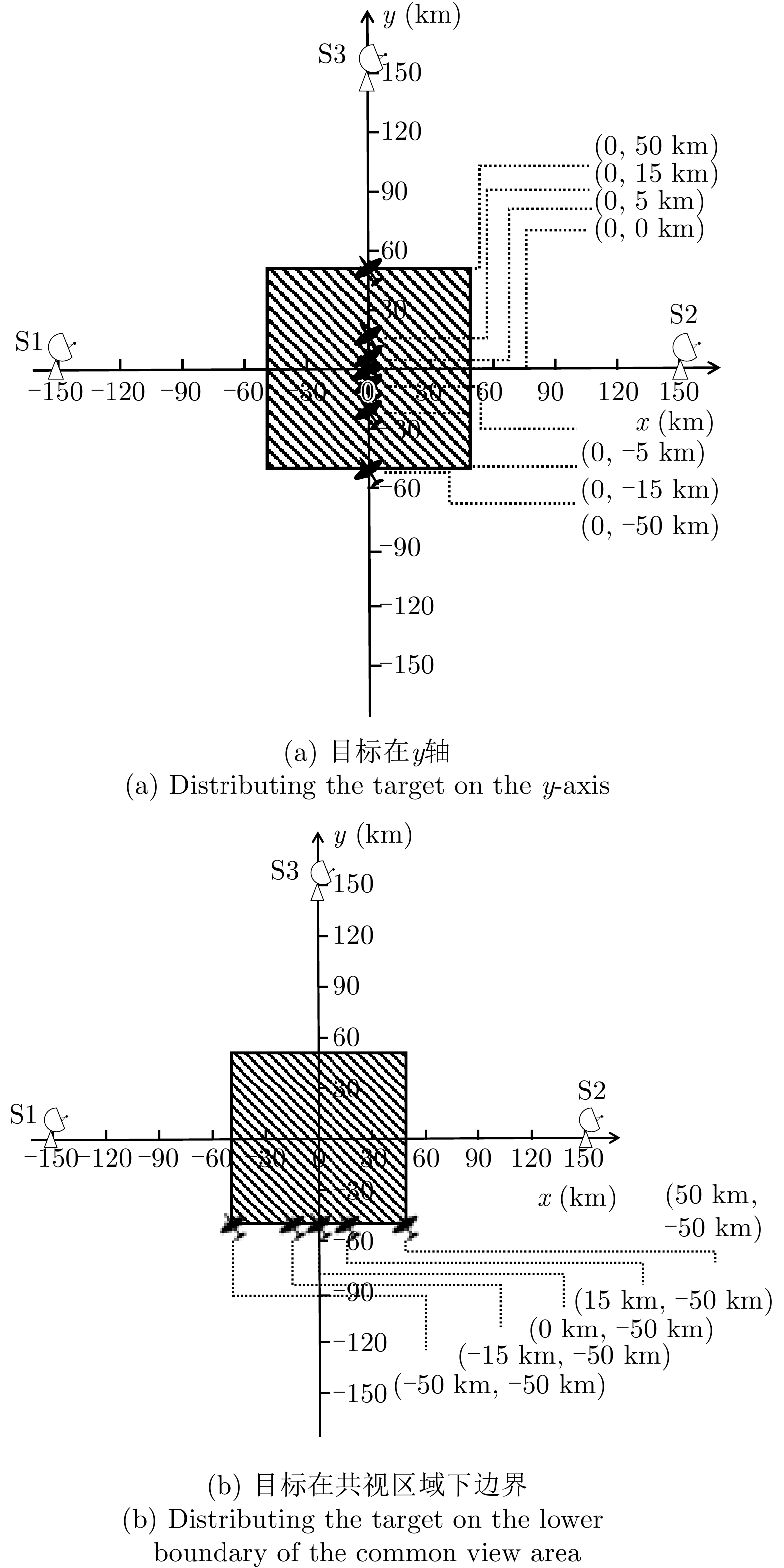
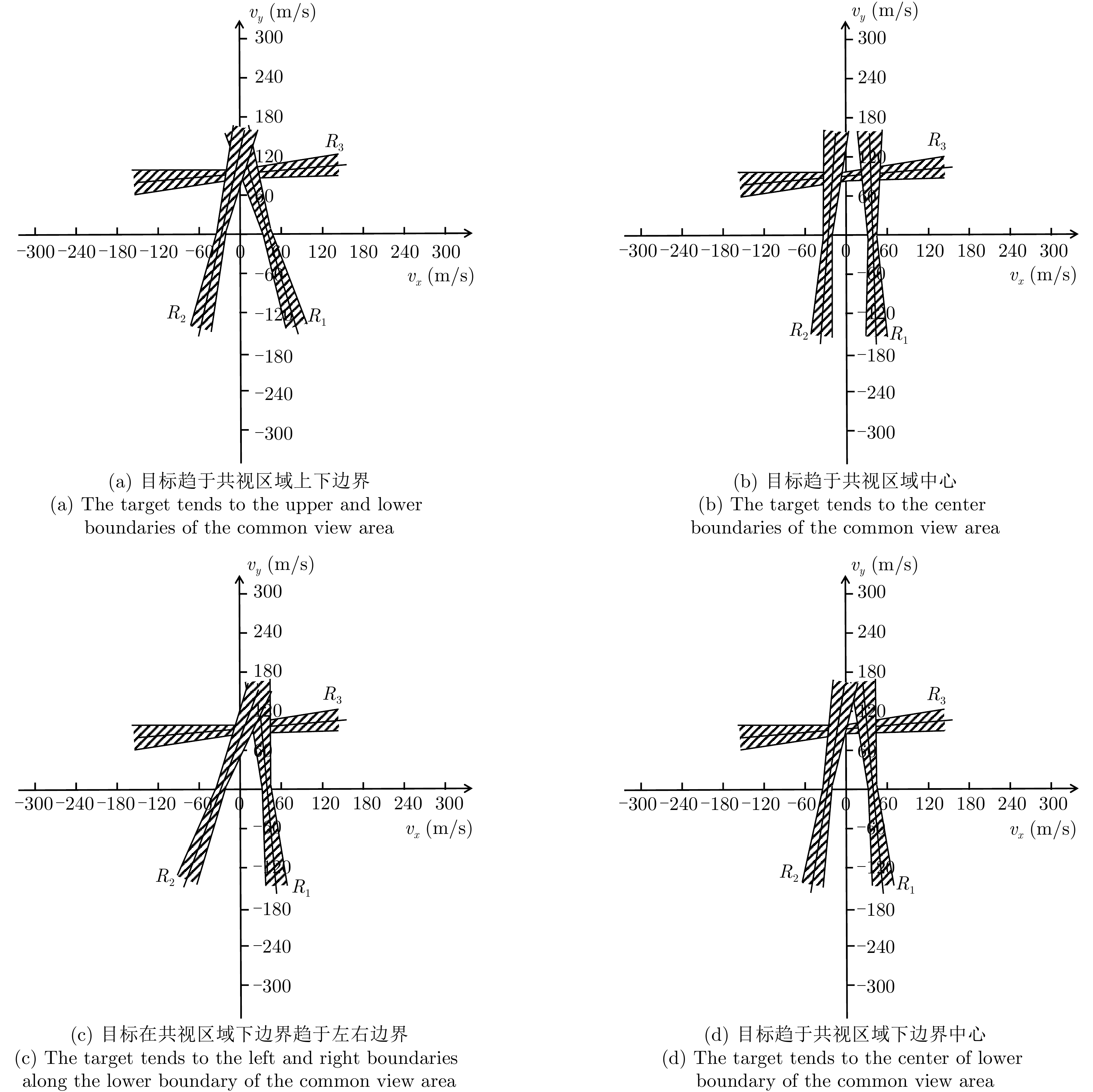
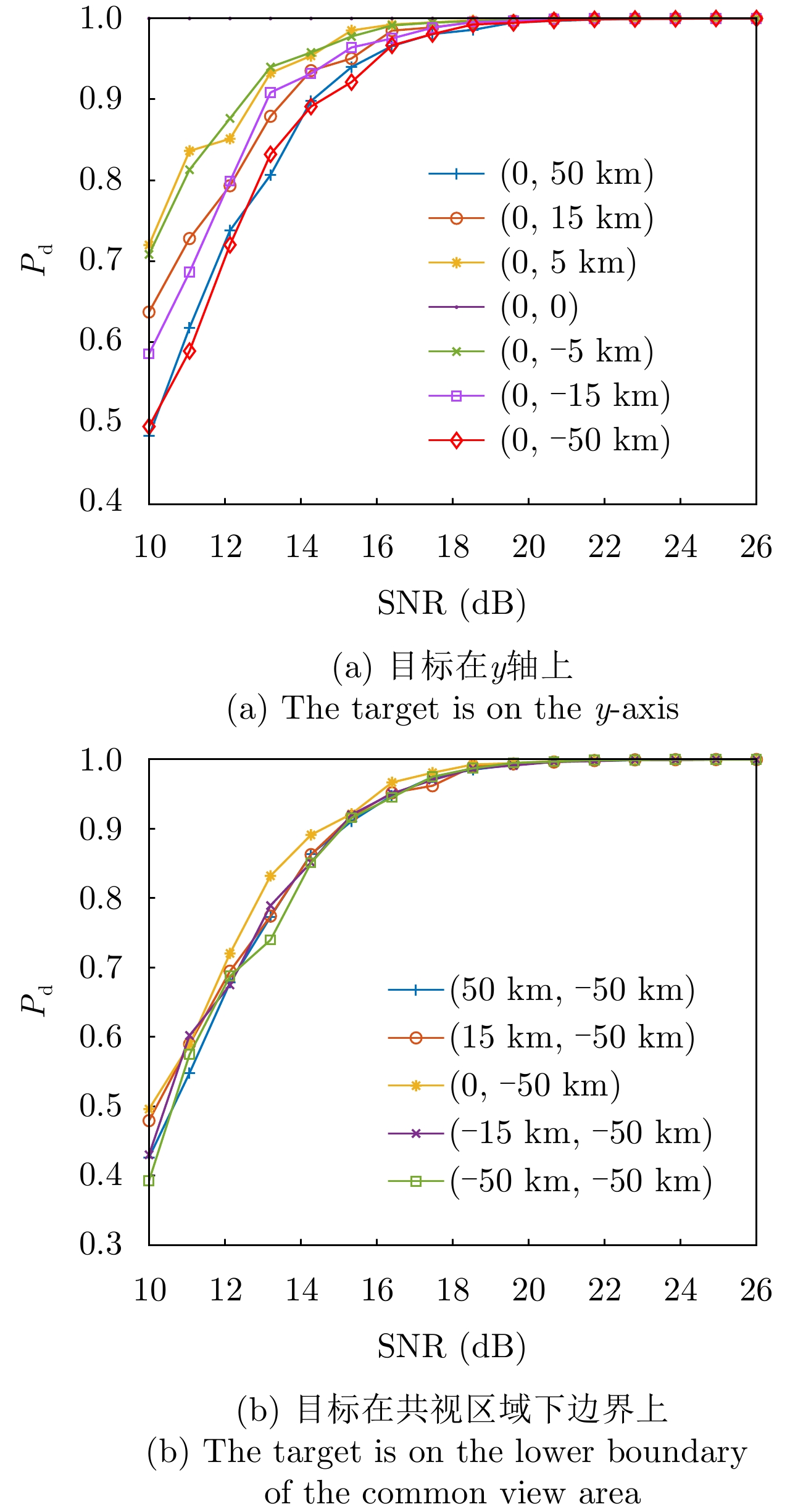
相比于单部雷达系统,空间分置的网络化雷达由于空间分集、频率分集等优势,通常具备更优的探测性能。当前基于网络化雷达系统的融合检测方法大多仅依据目标回波幅度信息,未考虑相参雷达系统能够获取的多普勒信息对融合检测的增益。直观地,网络化雷达系统中不同雷达观测到目标的空间位置与径向速度应当满足一定的物理约束,利用该额外信息应当能够提升目标与虚警的可分性。基于此,该文提出了多普勒信息辅助的网络化雷达融合检测算法:首先利用多雷达站对同一目标角度与多普勒速度观测的耦合性构建观测间需要满足的约束不等式组,然后基于运筹学中两阶段法对该不等式组是否有可行解做出判断,进而对目标是否存在做出判决。仿真实验表明,所提算法能够有效提升网络化雷达系统的融合检测性能。同时,该文还针对所提算法分析了雷达布站位置及目标位置对融合检测性能的影响。 相比于单部雷达系统,空间分置的网络化雷达由于空间分集、频率分集等优势,通常具备更优的探测性能。当前基于网络化雷达系统的融合检测方法大多仅依据目标回波幅度信息,未考虑相参雷达系统能够获取的多普勒信息对融合检测的增益。直观地,网络化雷达系统中不同雷达观测到目标的空间位置与径向速度应当满足一定的物理约束,利用该额外信息应当能够提升目标与虚警的可分性。基于此,该文提出了多普勒信息辅助的网络化雷达融合检测算法:首先利用多雷达站对同一目标角度与多普勒速度观测的耦合性构建观测间需要满足的约束不等式组,然后基于运筹学中两阶段法对该不等式组是否有可行解做出判断,进而对目标是否存在做出判决。仿真实验表明,所提算法能够有效提升网络化雷达系统的融合检测性能。同时,该文还针对所提算法分析了雷达布站位置及目标位置对融合检测性能的影响。
相比于单部雷达系统,空间分置的网络化雷达由于空间分集、频率分集等优势,通常具备更优的探测性能。当前基于网络化雷达系统的融合检测方法大多仅依据目标回波幅度信息,未考虑相参雷达系统能够获取的多普勒信息对融合检测的增益。直观地,网络化雷达系统中不同雷达观测到目标的空间位置与径向速度应当满足一定的物理约束,利用该额外信息应当能够提升目标与虚警的可分性。基于此,该文提出了多普勒信息辅助的网络化雷达融合检测算法:首先利用多雷达站对同一目标角度与多普勒速度观测的耦合性构建观测间需要满足的约束不等式组,然后基于运筹学中两阶段法对该不等式组是否有可行解做出判断,进而对目标是否存在做出判决。仿真实验表明,所提算法能够有效提升网络化雷达系统的融合检测性能。同时,该文还针对所提算法分析了雷达布站位置及目标位置对融合检测性能的影响。 相比于单部雷达系统,空间分置的网络化雷达由于空间分集、频率分集等优势,通常具备更优的探测性能。当前基于网络化雷达系统的融合检测方法大多仅依据目标回波幅度信息,未考虑相参雷达系统能够获取的多普勒信息对融合检测的增益。直观地,网络化雷达系统中不同雷达观测到目标的空间位置与径向速度应当满足一定的物理约束,利用该额外信息应当能够提升目标与虚警的可分性。基于此,该文提出了多普勒信息辅助的网络化雷达融合检测算法:首先利用多雷达站对同一目标角度与多普勒速度观测的耦合性构建观测间需要满足的约束不等式组,然后基于运筹学中两阶段法对该不等式组是否有可行解做出判断,进而对目标是否存在做出判决。仿真实验表明,所提算法能够有效提升网络化雷达系统的融合检测性能。同时,该文还针对所提算法分析了雷达布站位置及目标位置对融合检测性能的影响。


2023, 12(3): 516-528.
摘要:
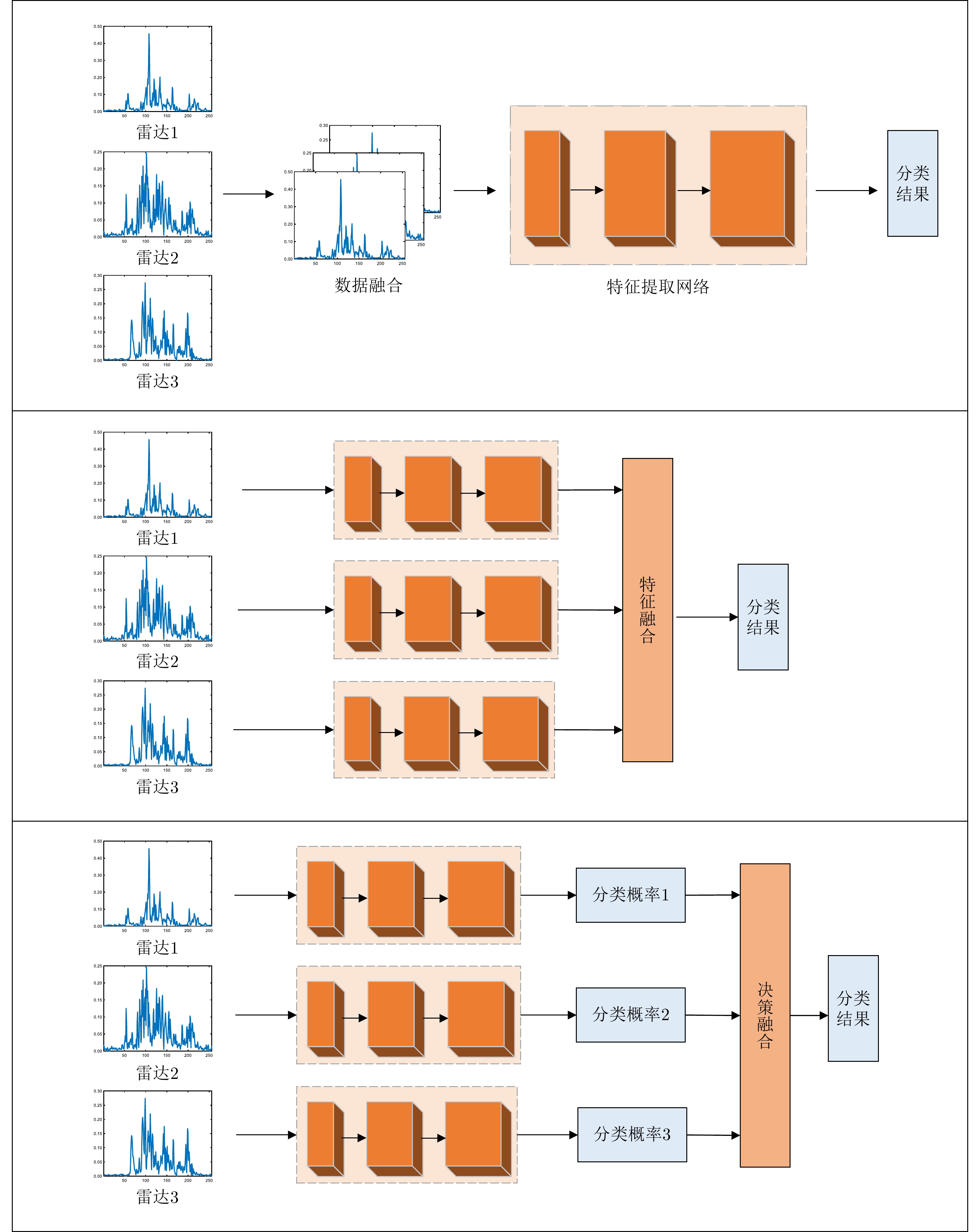
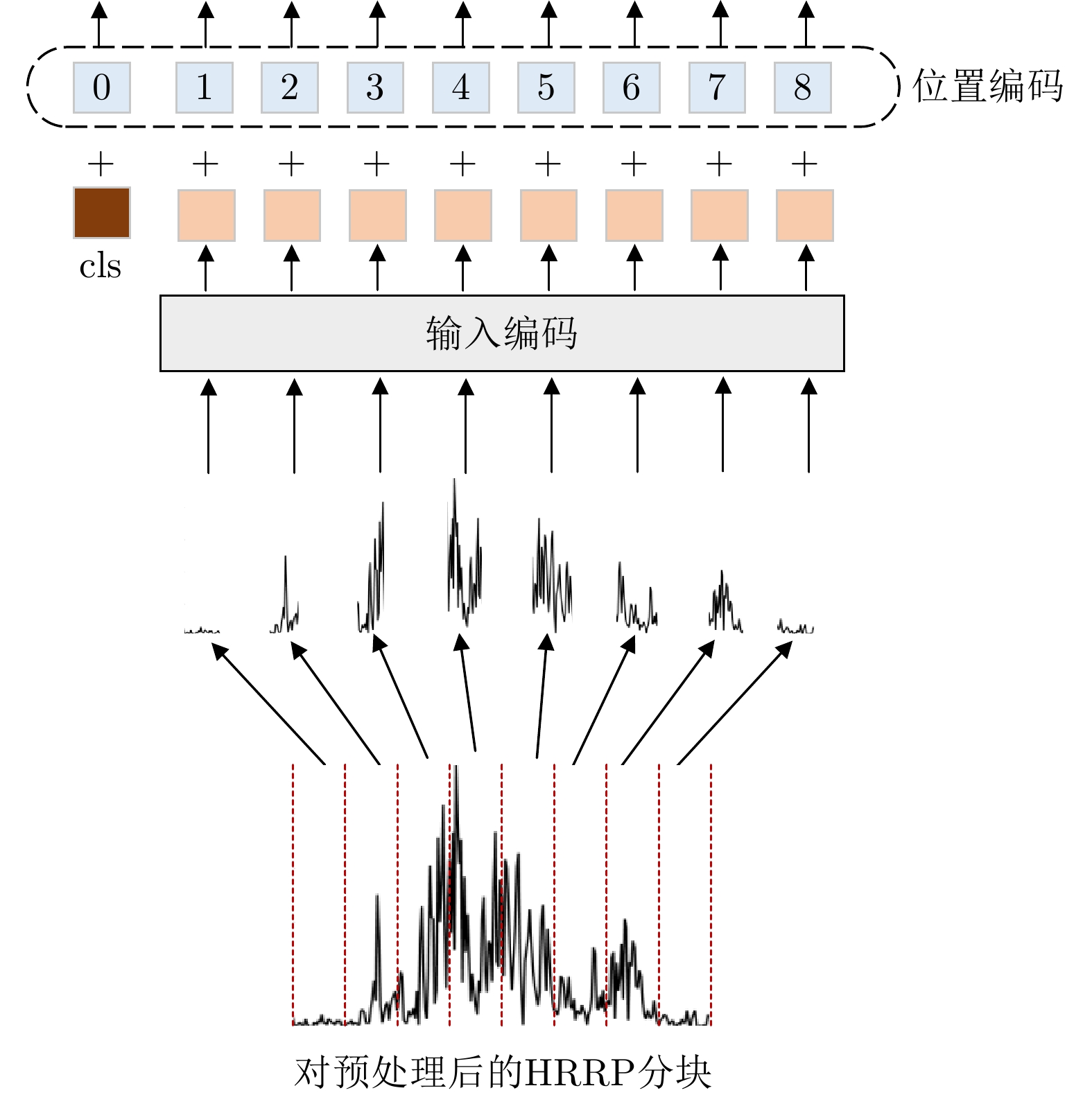
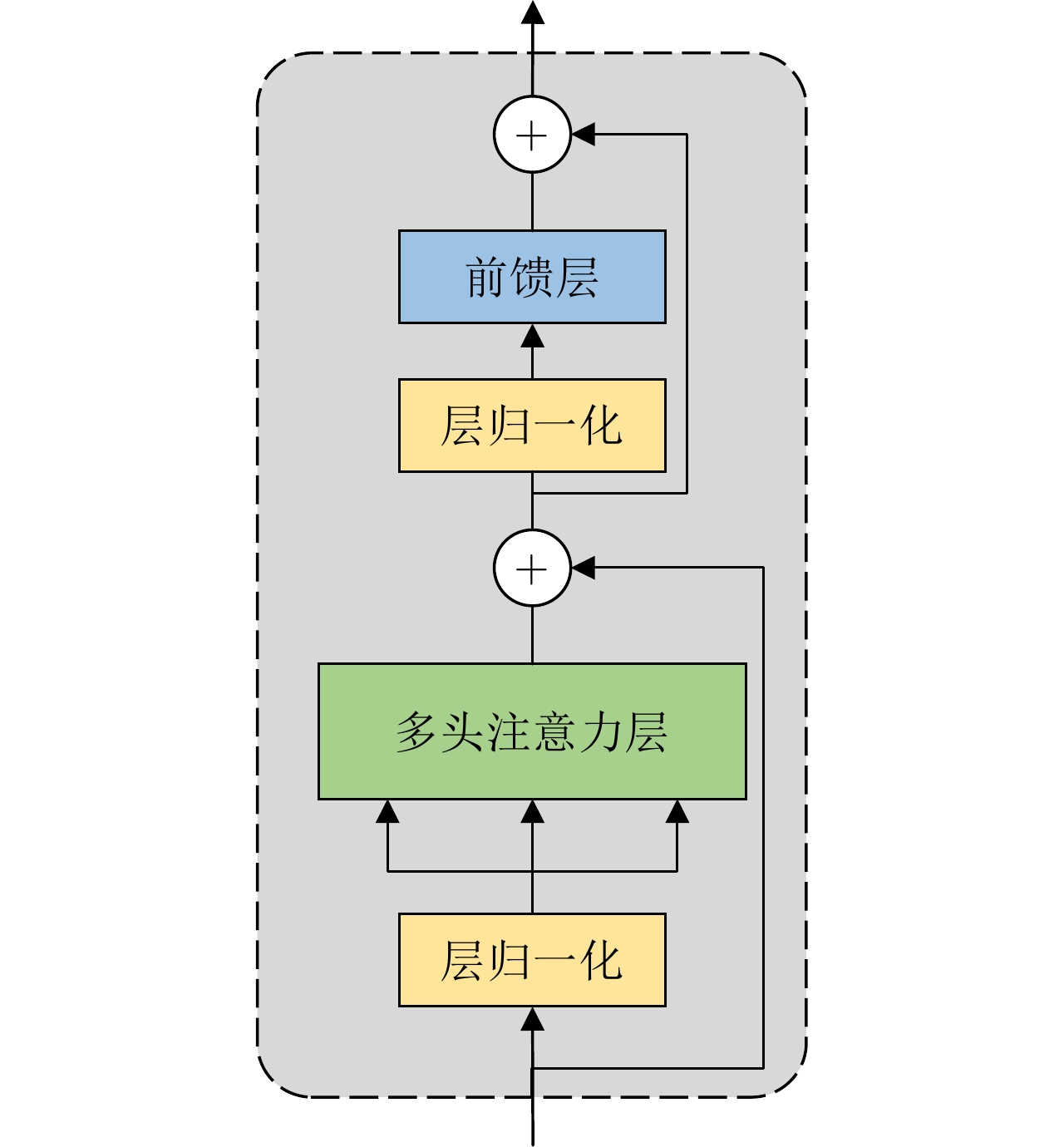
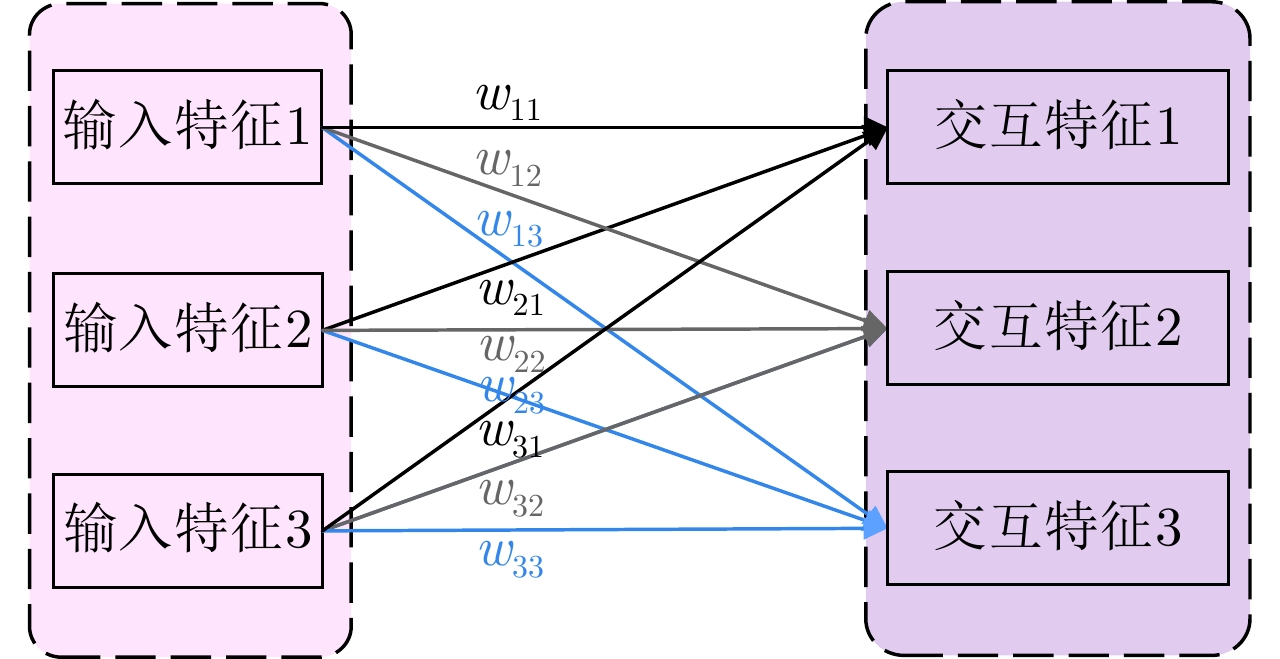
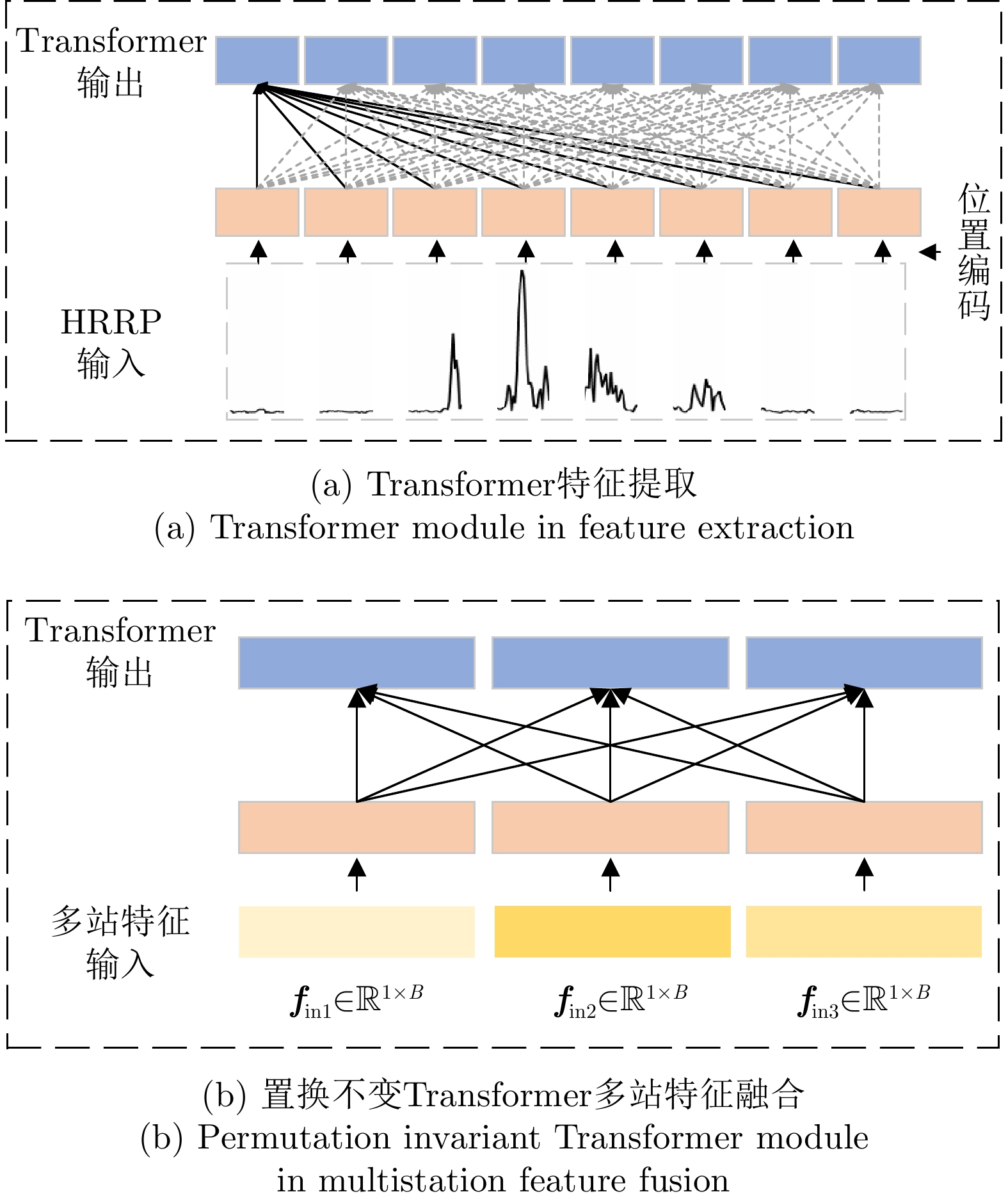
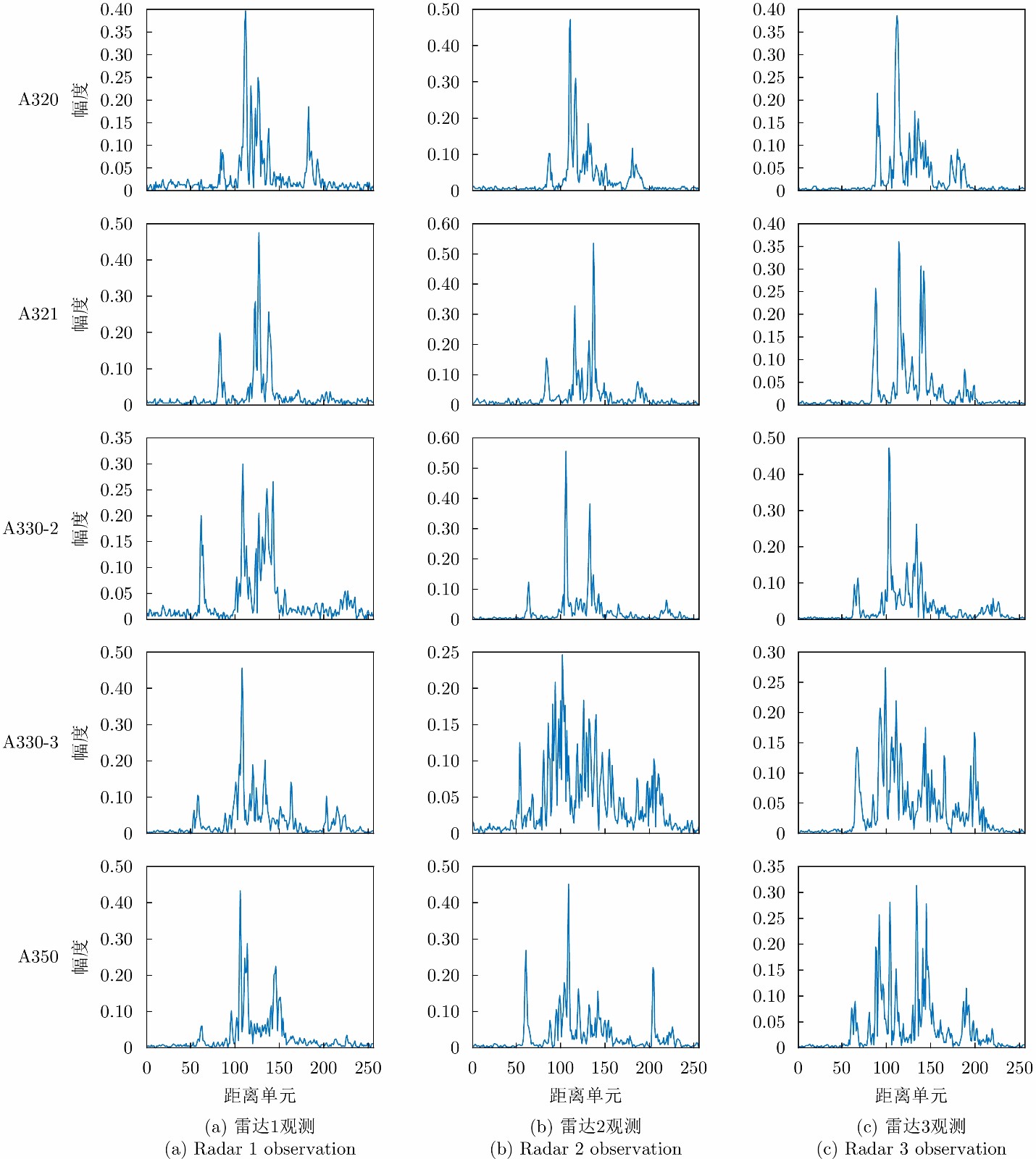
多站协同雷达目标识别旨在利用多站信息的互补性提升识别性能。传统多站协同目标识别方法未直接考虑站间数据差异问题,且通常采用相对简单的融合策略,难以取得准确、稳健的识别性能。该文针对多站协同雷达高分辨距离像(HRRP)目标识别问题,提出了一种基于角度引导的Transformer融合网络。该网络以Transformer作为特征提取主体结构,提取单站HRRP的局部和全局特征。并在此基础上设计了3个新的辅助模块促进多站特征融合学习,角度引导模块、前级特征交互模块以及深层注意力特征融合模块。首先,角度引导模块使用目标方位角度对站间数据差异进行建模,强化了所提特征与多站视角的对应关系,提升了特征稳健性与一致性。其次,前级特征交互模块和深层注意力特征融合模块相结合的融合策略,实现了对各站特征的多阶段层次化融合。最后,基于实测数据模拟多站场景进行协同识别实验,结果表明所提方法能够有效地提升多站协同时的目标识别性能。 多站协同雷达目标识别旨在利用多站信息的互补性提升识别性能。传统多站协同目标识别方法未直接考虑站间数据差异问题,且通常采用相对简单的融合策略,难以取得准确、稳健的识别性能。该文针对多站协同雷达高分辨距离像(HRRP)目标识别问题,提出了一种基于角度引导的Transformer融合网络。该网络以Transformer作为特征提取主体结构,提取单站HRRP的局部和全局特征。并在此基础上设计了3个新的辅助模块促进多站特征融合学习,角度引导模块、前级特征交互模块以及深层注意力特征融合模块。首先,角度引导模块使用目标方位角度对站间数据差异进行建模,强化了所提特征与多站视角的对应关系,提升了特征稳健性与一致性。其次,前级特征交互模块和深层注意力特征融合模块相结合的融合策略,实现了对各站特征的多阶段层次化融合。最后,基于实测数据模拟多站场景进行协同识别实验,结果表明所提方法能够有效地提升多站协同时的目标识别性能。
多站协同雷达目标识别旨在利用多站信息的互补性提升识别性能。传统多站协同目标识别方法未直接考虑站间数据差异问题,且通常采用相对简单的融合策略,难以取得准确、稳健的识别性能。该文针对多站协同雷达高分辨距离像(HRRP)目标识别问题,提出了一种基于角度引导的Transformer融合网络。该网络以Transformer作为特征提取主体结构,提取单站HRRP的局部和全局特征。并在此基础上设计了3个新的辅助模块促进多站特征融合学习,角度引导模块、前级特征交互模块以及深层注意力特征融合模块。首先,角度引导模块使用目标方位角度对站间数据差异进行建模,强化了所提特征与多站视角的对应关系,提升了特征稳健性与一致性。其次,前级特征交互模块和深层注意力特征融合模块相结合的融合策略,实现了对各站特征的多阶段层次化融合。最后,基于实测数据模拟多站场景进行协同识别实验,结果表明所提方法能够有效地提升多站协同时的目标识别性能。 多站协同雷达目标识别旨在利用多站信息的互补性提升识别性能。传统多站协同目标识别方法未直接考虑站间数据差异问题,且通常采用相对简单的融合策略,难以取得准确、稳健的识别性能。该文针对多站协同雷达高分辨距离像(HRRP)目标识别问题,提出了一种基于角度引导的Transformer融合网络。该网络以Transformer作为特征提取主体结构,提取单站HRRP的局部和全局特征。并在此基础上设计了3个新的辅助模块促进多站特征融合学习,角度引导模块、前级特征交互模块以及深层注意力特征融合模块。首先,角度引导模块使用目标方位角度对站间数据差异进行建模,强化了所提特征与多站视角的对应关系,提升了特征稳健性与一致性。其次,前级特征交互模块和深层注意力特征融合模块相结合的融合策略,实现了对各站特征的多阶段层次化融合。最后,基于实测数据模拟多站场景进行协同识别实验,结果表明所提方法能够有效地提升多站协同时的目标识别性能。






2023, 12(3): 529-540.
摘要:
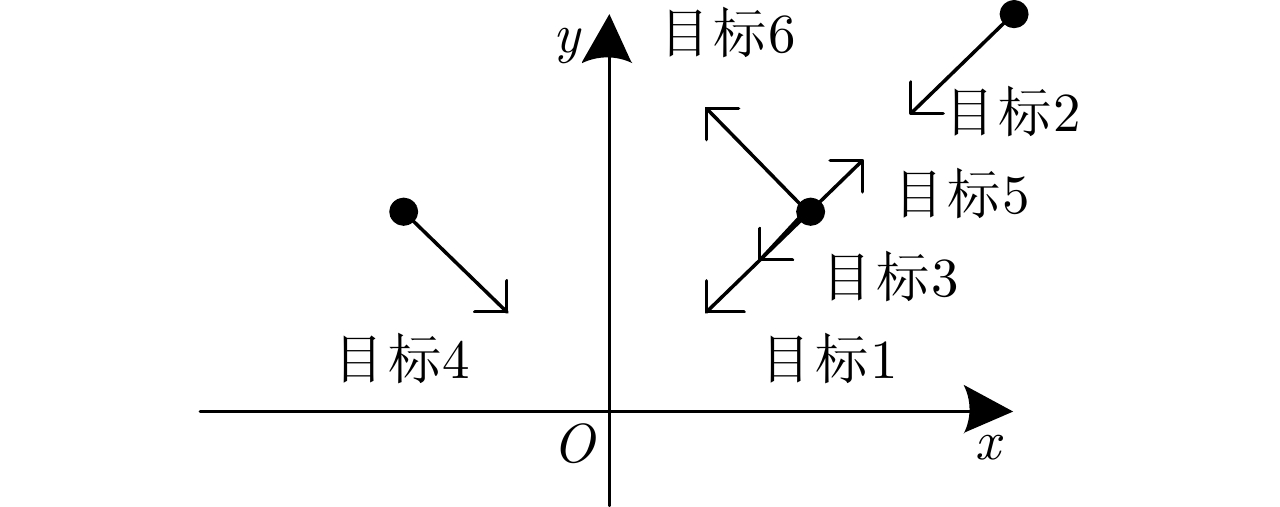
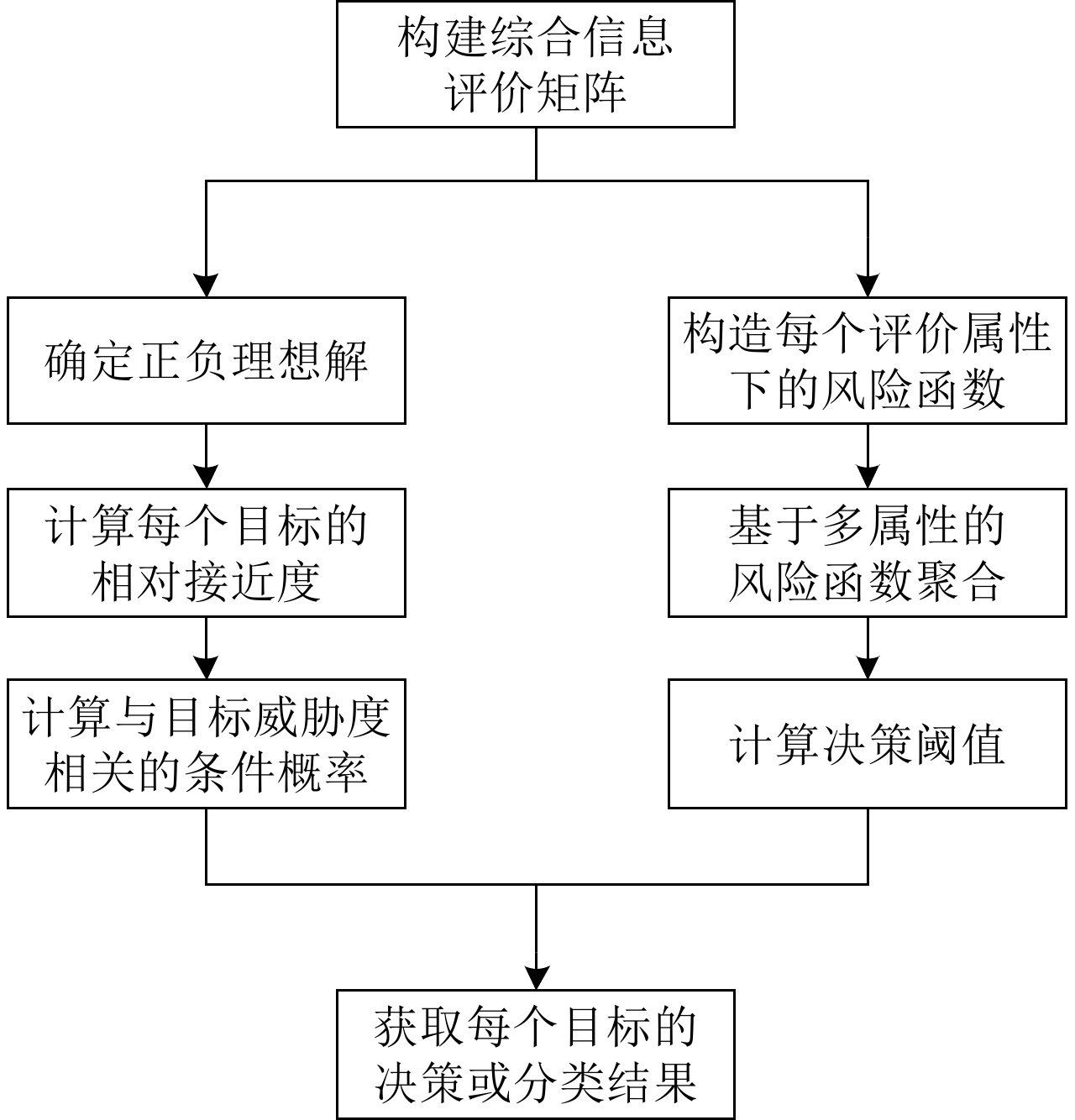
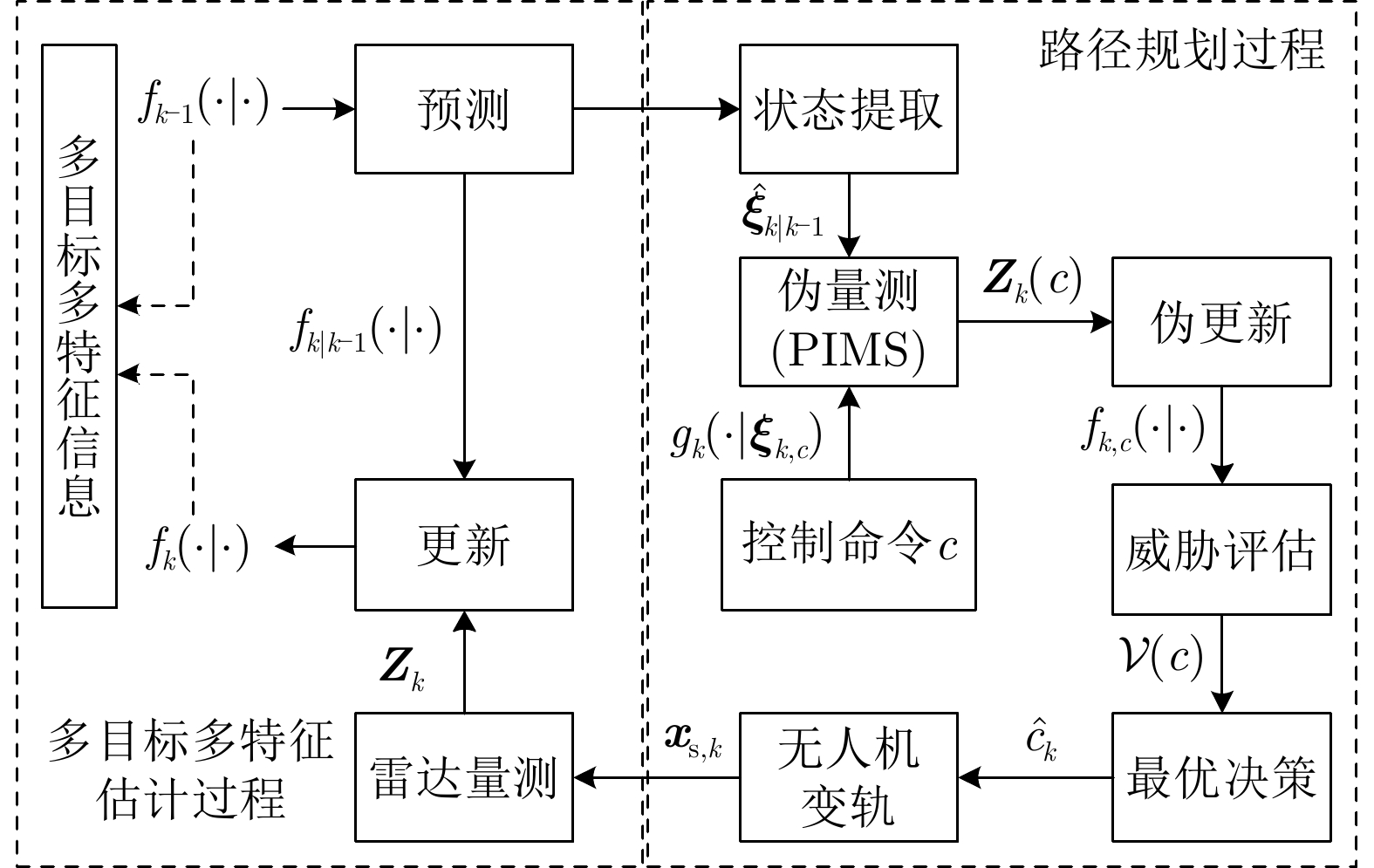
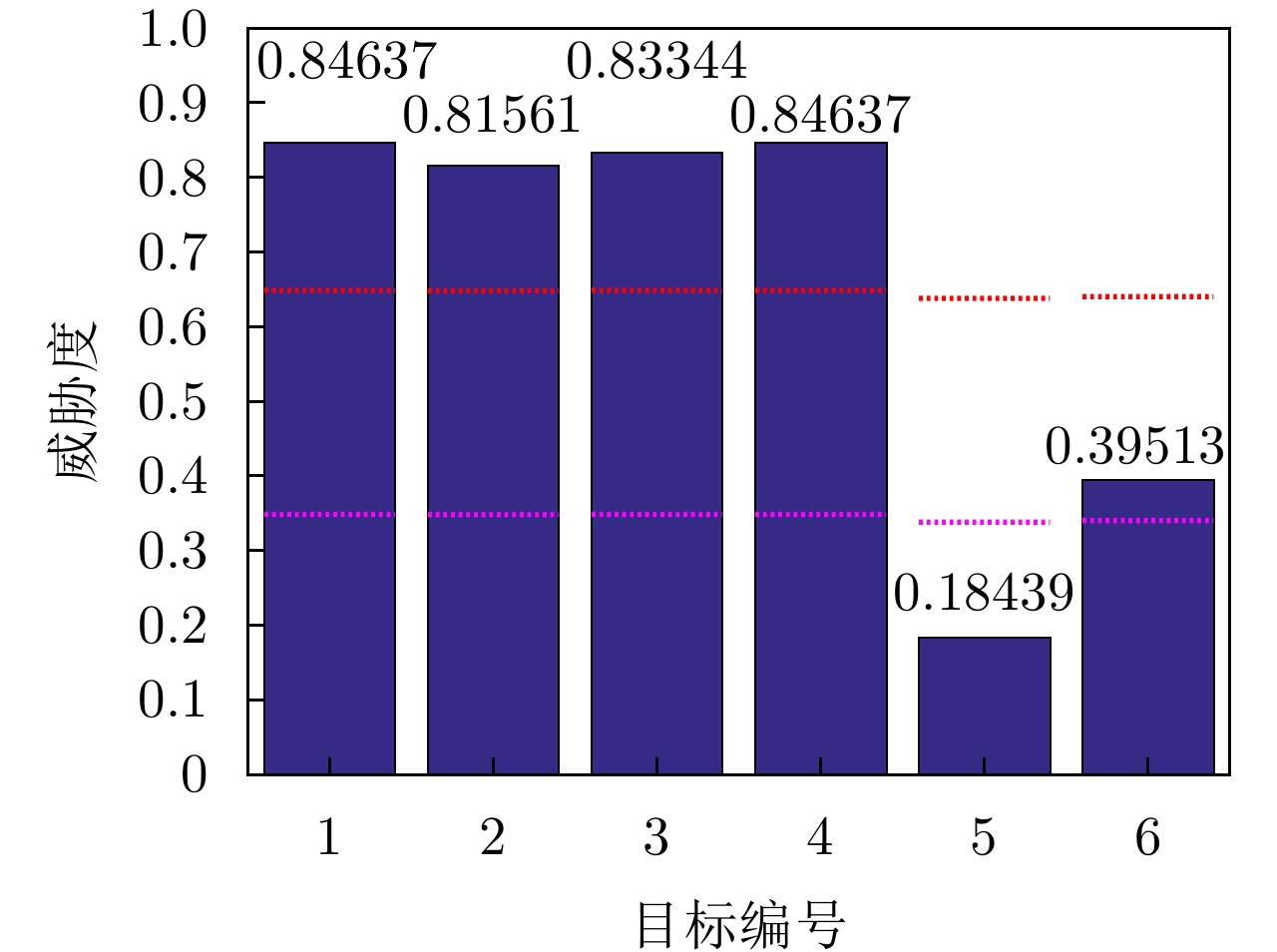
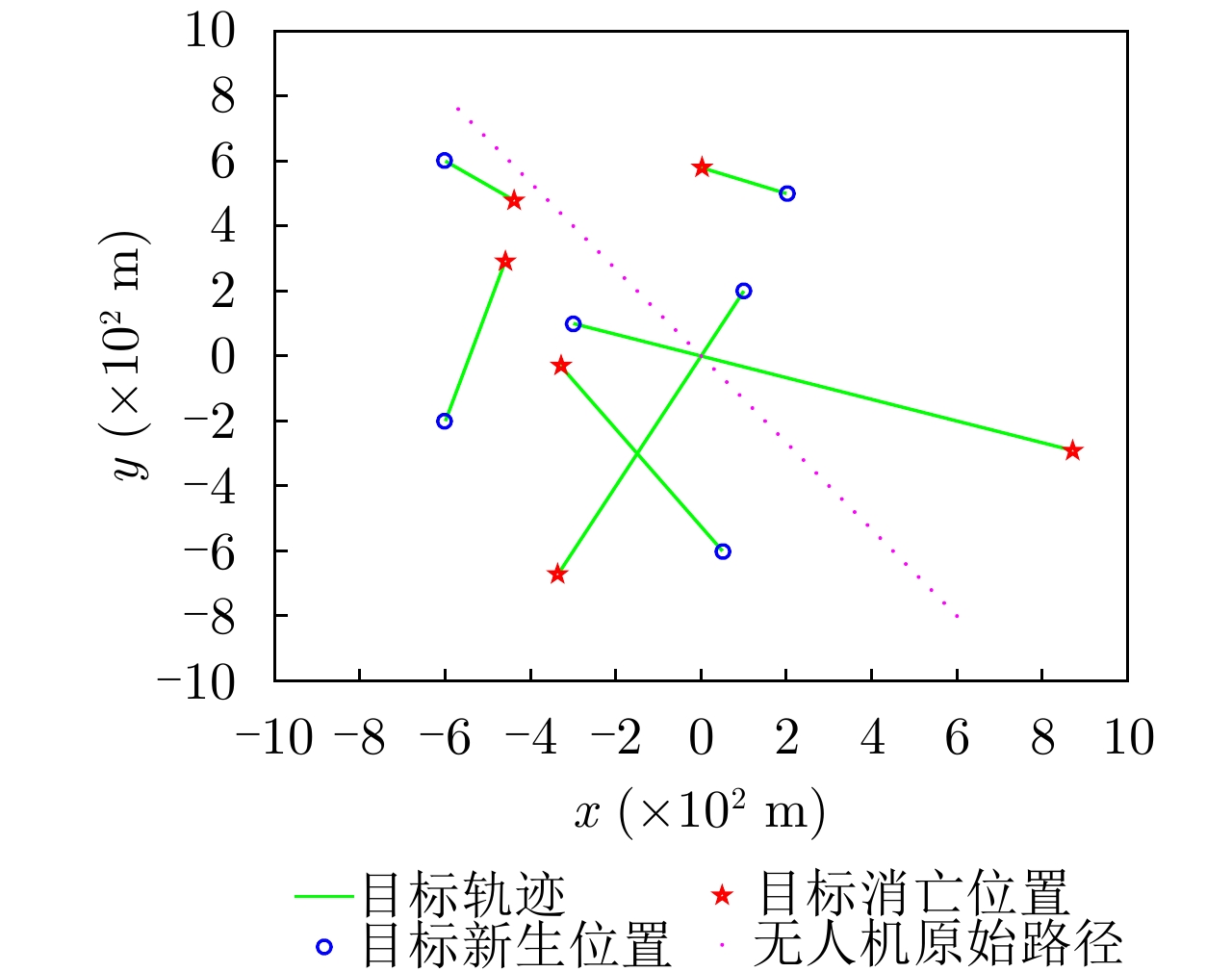
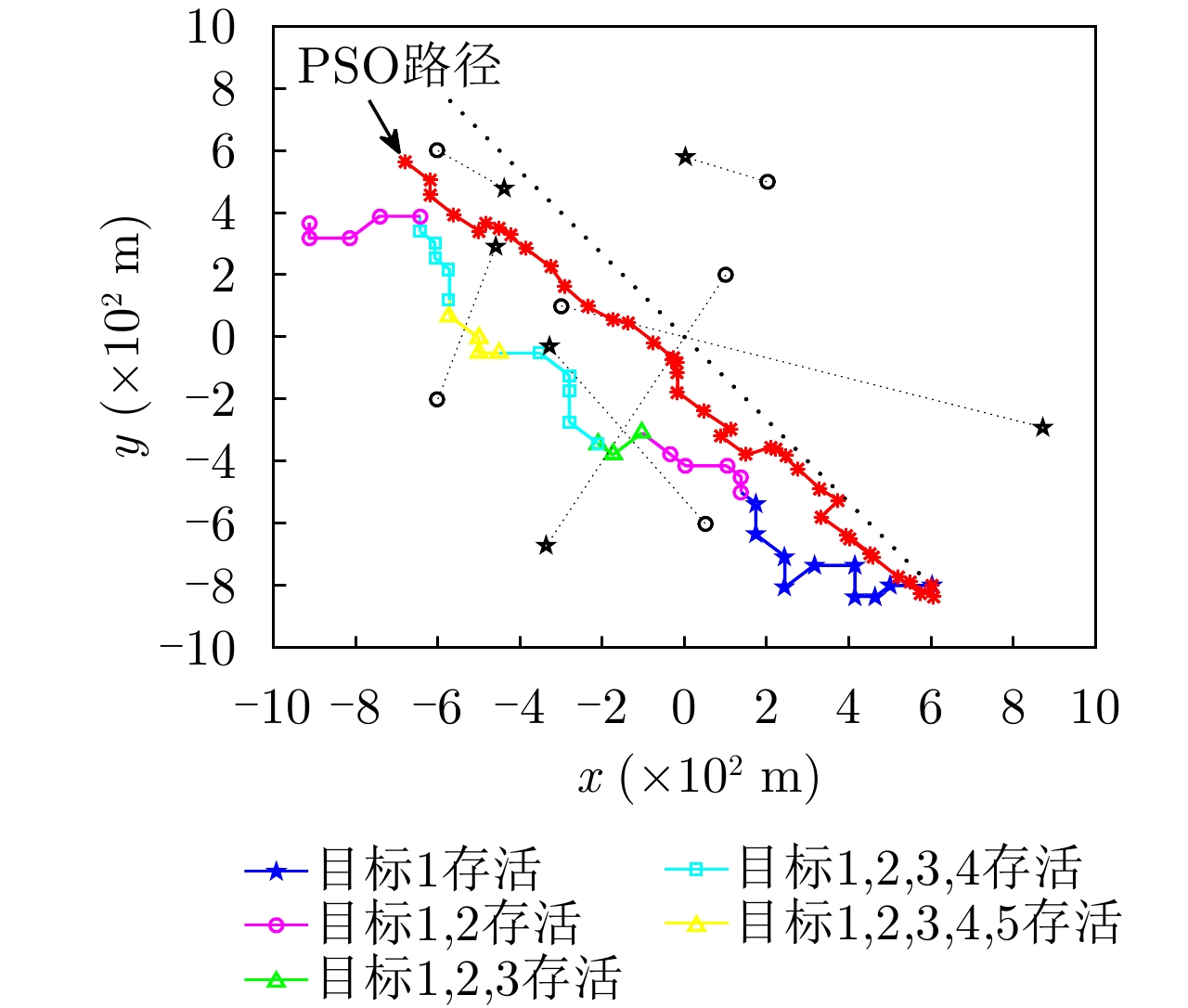
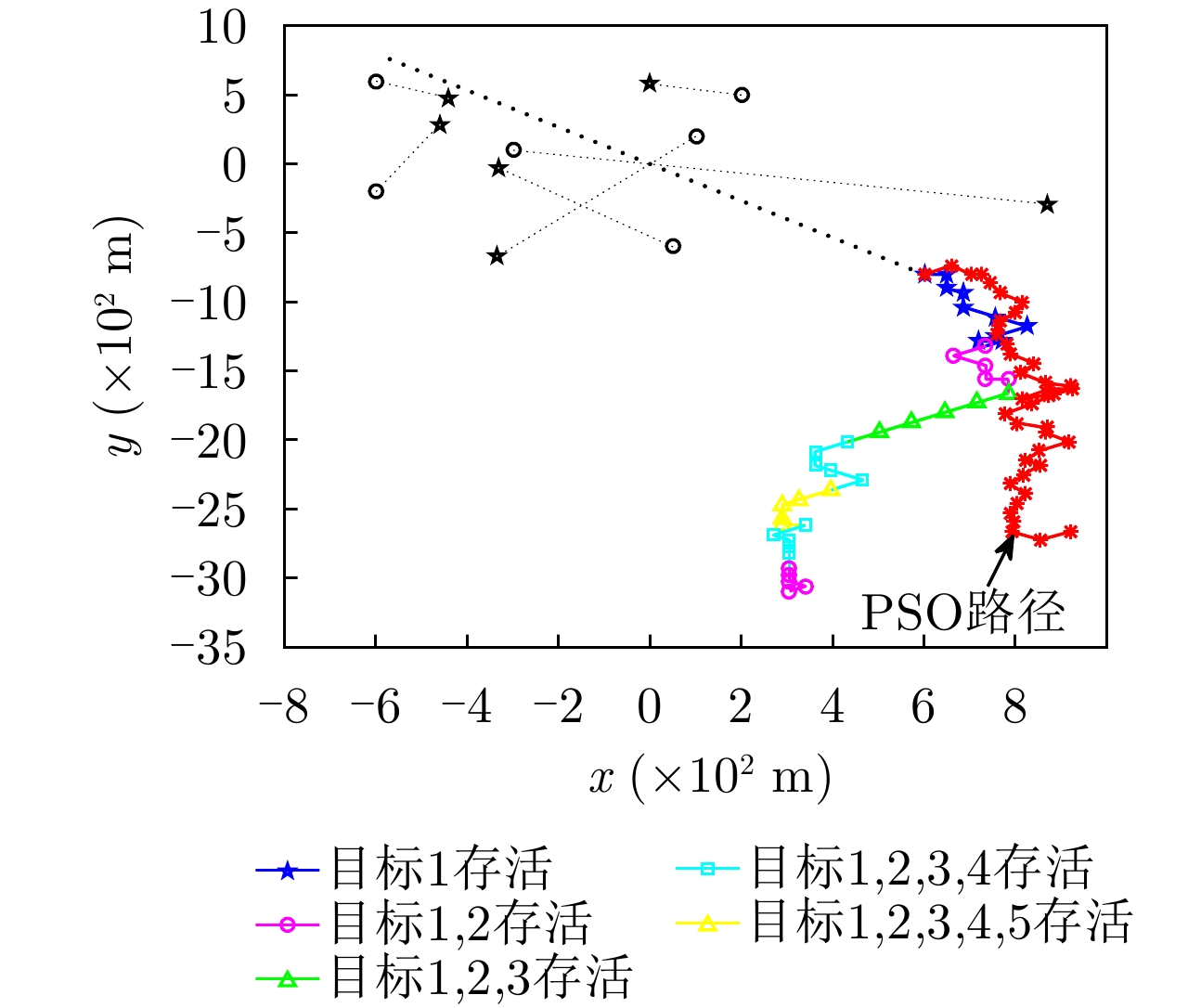
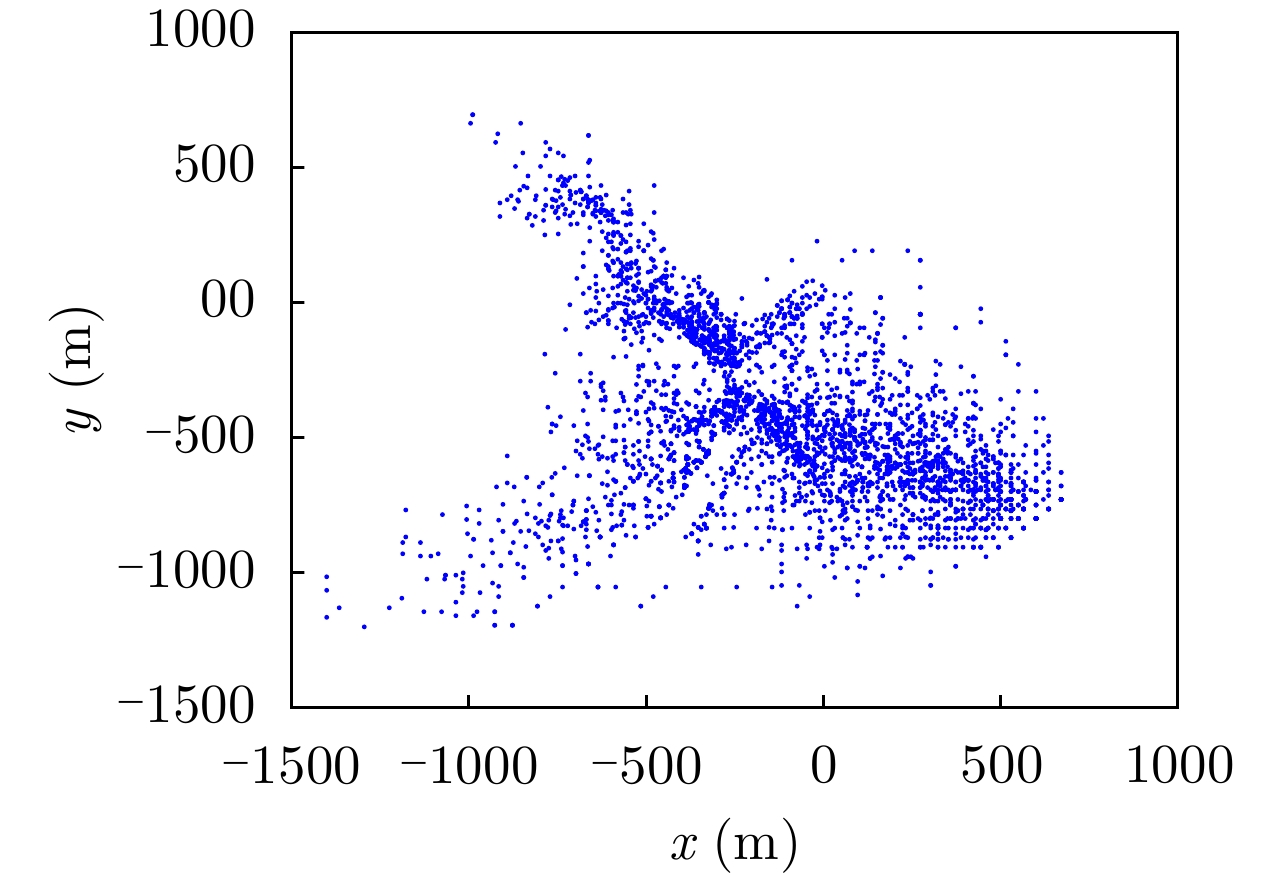
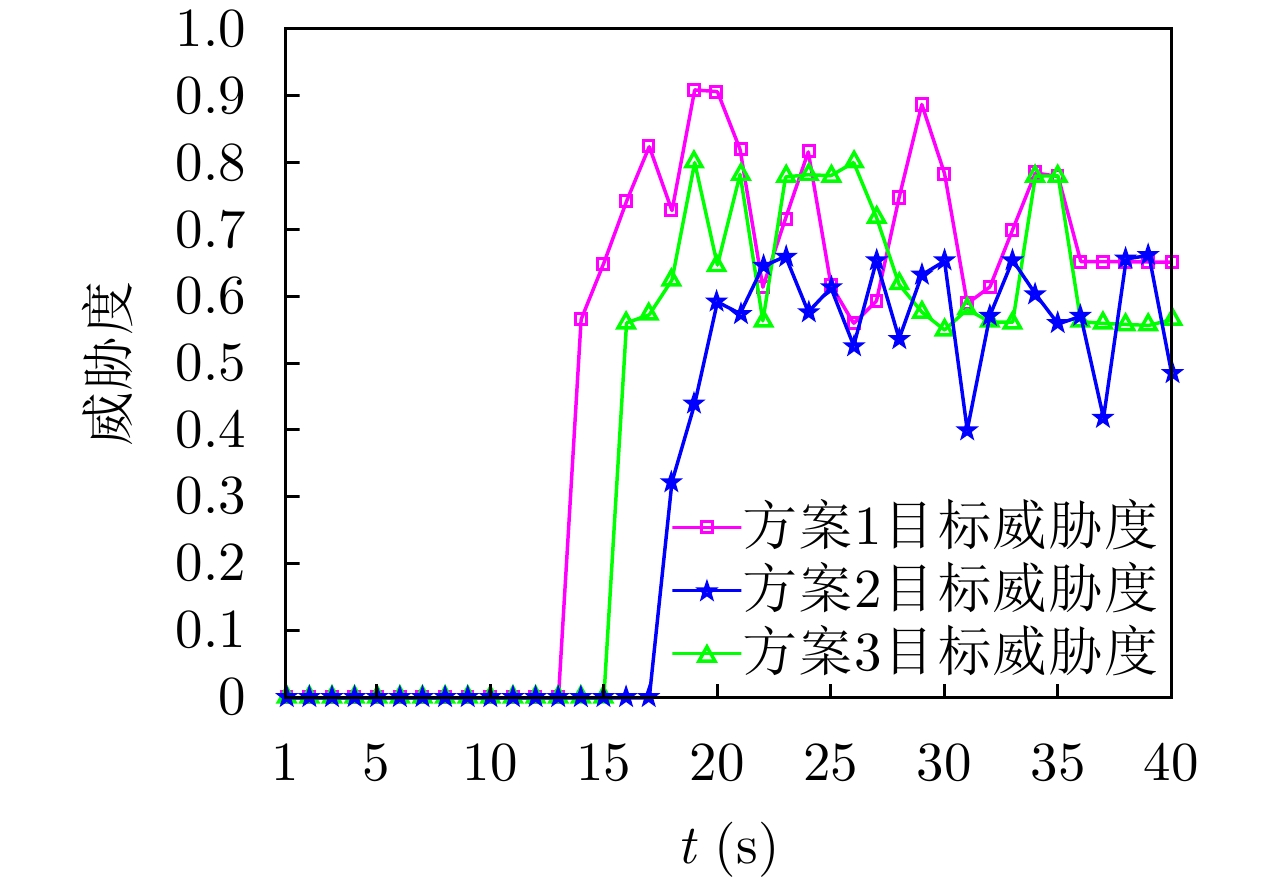
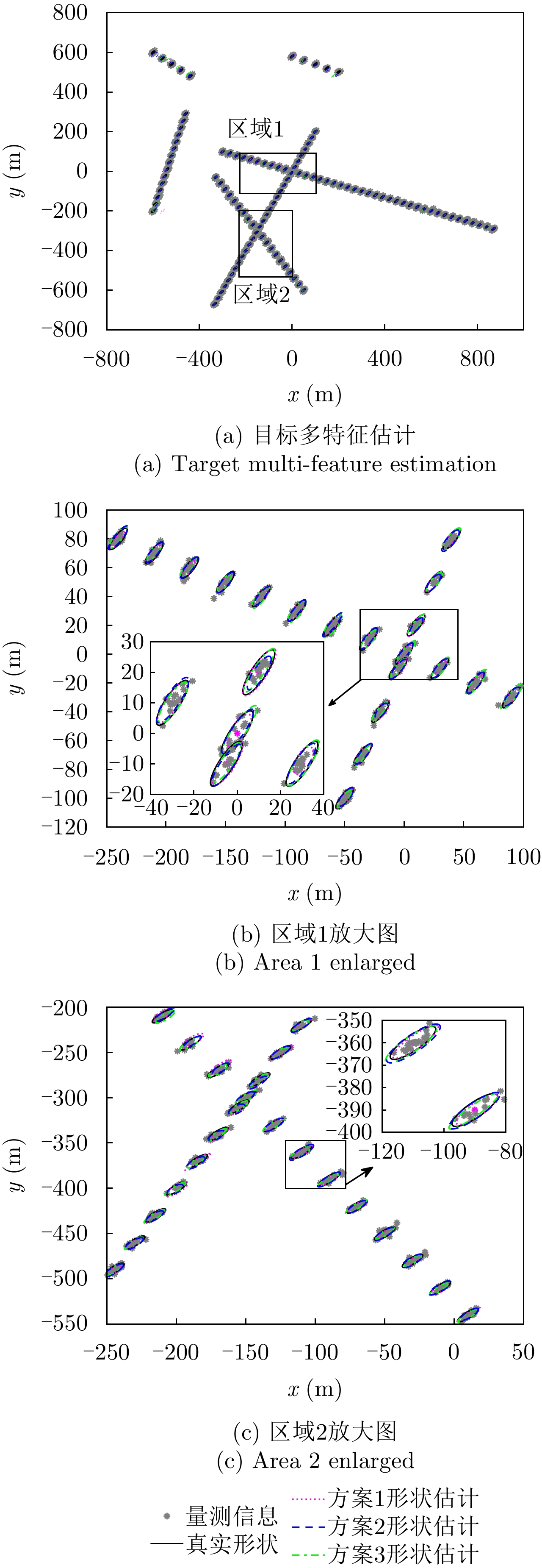
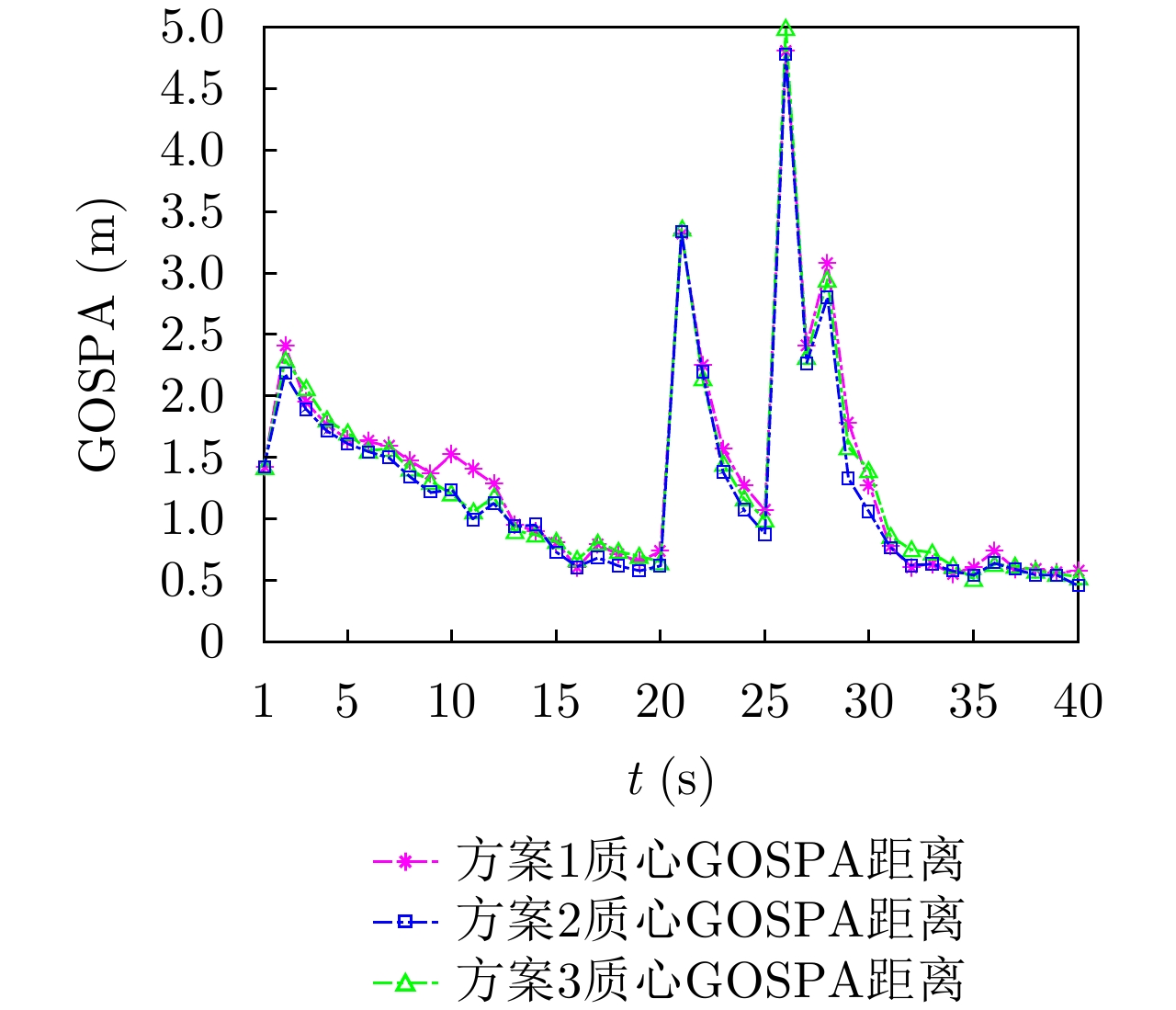
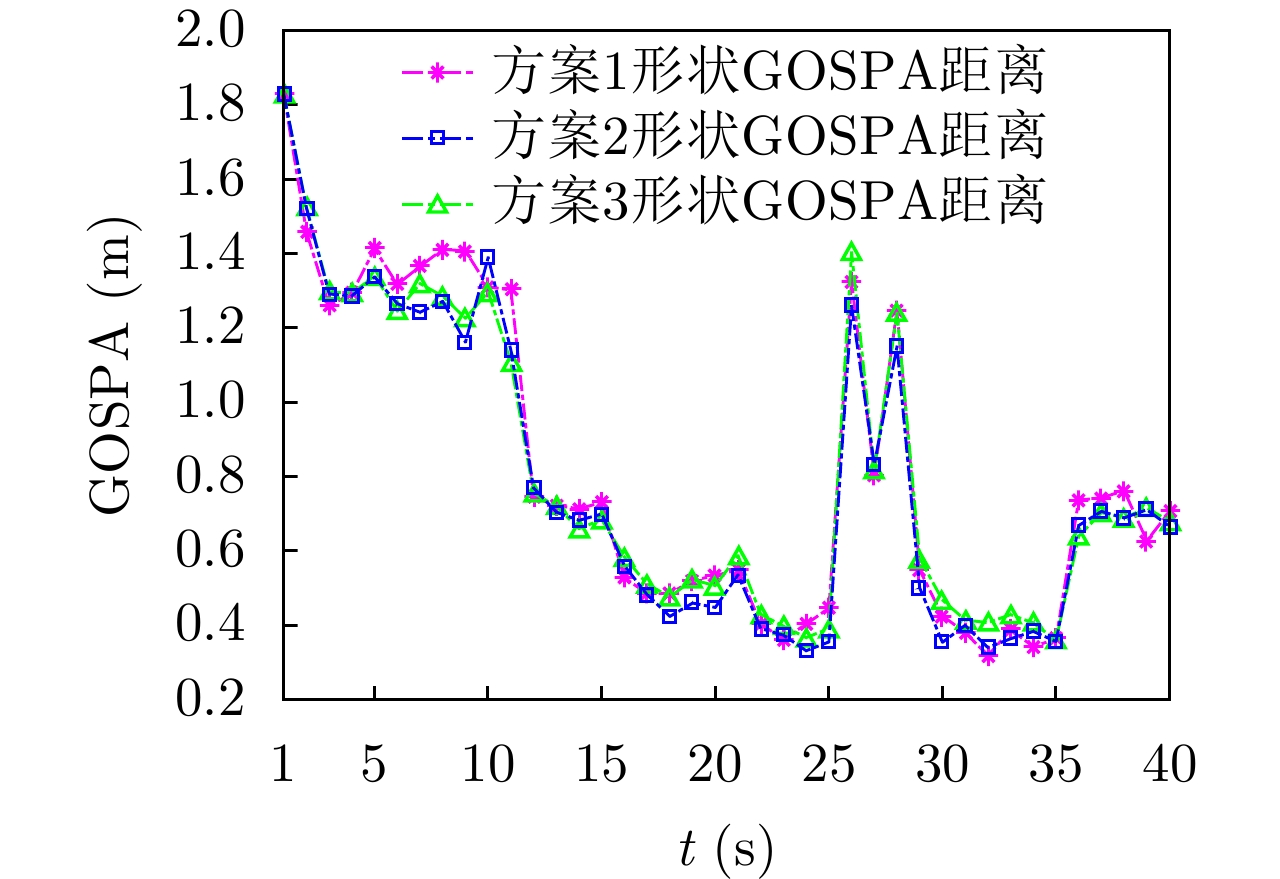
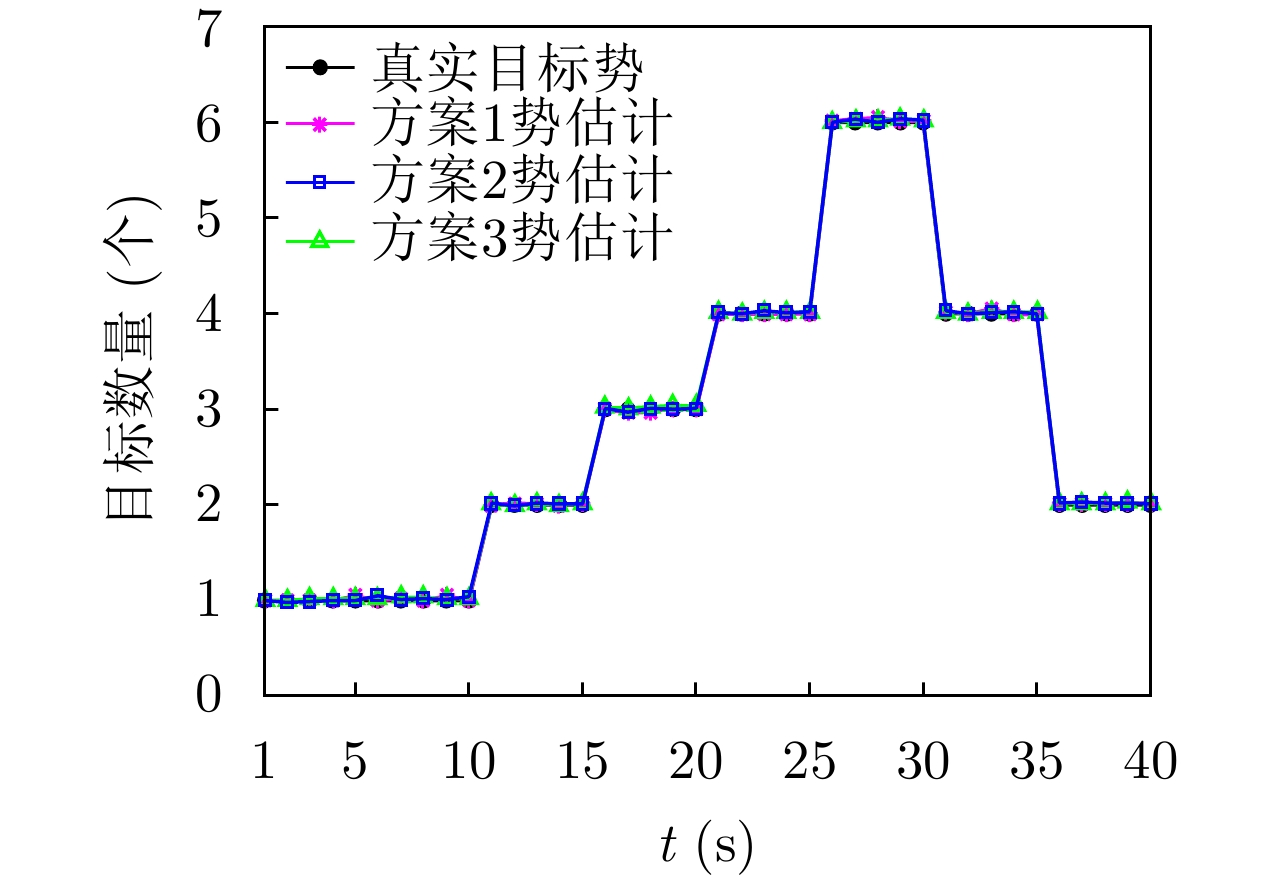
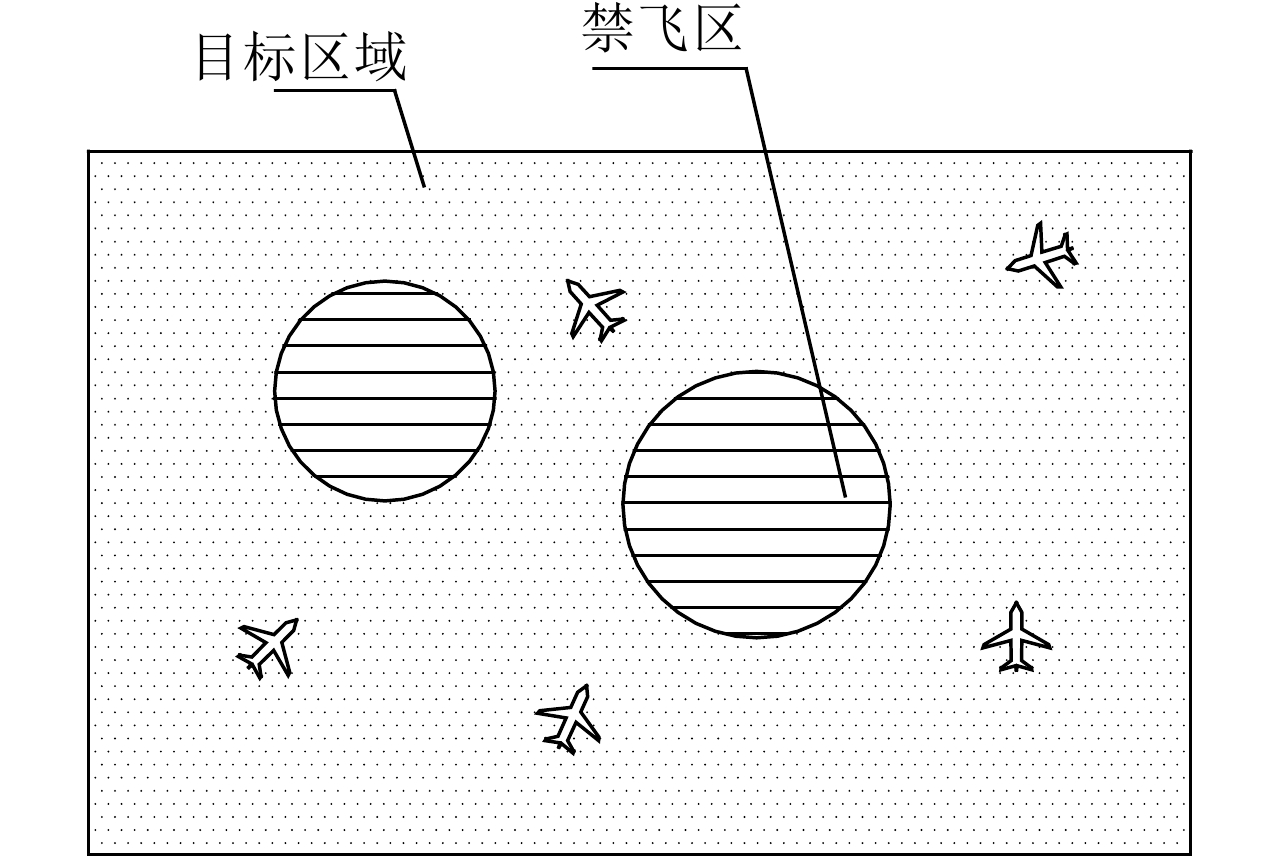
为了降低无人机执行侦察任务时被摧毁的概率,该文提出一种有效减少威胁的路径规划算法。首先利用高分辨率机载雷达对多扩展目标进行稳健的跟踪估计,然后根据三向决策规则对各目标按威胁进行分类,并利用模糊理想解相似性排序技术(TOPSIS)的方法计算目标威胁度,综合多任务决策联合优化(联合评估目标威胁度和目标跟踪质量)作为评价准则对无人机进行路径规划。仿真实验表明,模糊威胁度评估方法在多扩展目标跟踪环境下是有效的,所提无人机路径规划算法是合理的,在不损失目标跟踪精度的条件下有效降低了目标威胁度。 为了降低无人机执行侦察任务时被摧毁的概率,该文提出一种有效减少威胁的路径规划算法。首先利用高分辨率机载雷达对多扩展目标进行稳健的跟踪估计,然后根据三向决策规则对各目标按威胁进行分类,并利用模糊理想解相似性排序技术(TOPSIS)的方法计算目标威胁度,综合多任务决策联合优化(联合评估目标威胁度和目标跟踪质量)作为评价准则对无人机进行路径规划。仿真实验表明,模糊威胁度评估方法在多扩展目标跟踪环境下是有效的,所提无人机路径规划算法是合理的,在不损失目标跟踪精度的条件下有效降低了目标威胁度。
为了降低无人机执行侦察任务时被摧毁的概率,该文提出一种有效减少威胁的路径规划算法。首先利用高分辨率机载雷达对多扩展目标进行稳健的跟踪估计,然后根据三向决策规则对各目标按威胁进行分类,并利用模糊理想解相似性排序技术(TOPSIS)的方法计算目标威胁度,综合多任务决策联合优化(联合评估目标威胁度和目标跟踪质量)作为评价准则对无人机进行路径规划。仿真实验表明,模糊威胁度评估方法在多扩展目标跟踪环境下是有效的,所提无人机路径规划算法是合理的,在不损失目标跟踪精度的条件下有效降低了目标威胁度。 为了降低无人机执行侦察任务时被摧毁的概率,该文提出一种有效减少威胁的路径规划算法。首先利用高分辨率机载雷达对多扩展目标进行稳健的跟踪估计,然后根据三向决策规则对各目标按威胁进行分类,并利用模糊理想解相似性排序技术(TOPSIS)的方法计算目标威胁度,综合多任务决策联合优化(联合评估目标威胁度和目标跟踪质量)作为评价准则对无人机进行路径规划。仿真实验表明,模糊威胁度评估方法在多扩展目标跟踪环境下是有效的,所提无人机路径规划算法是合理的,在不损失目标跟踪精度的条件下有效降低了目标威胁度。

2023, 12(3): 541-549.
摘要:
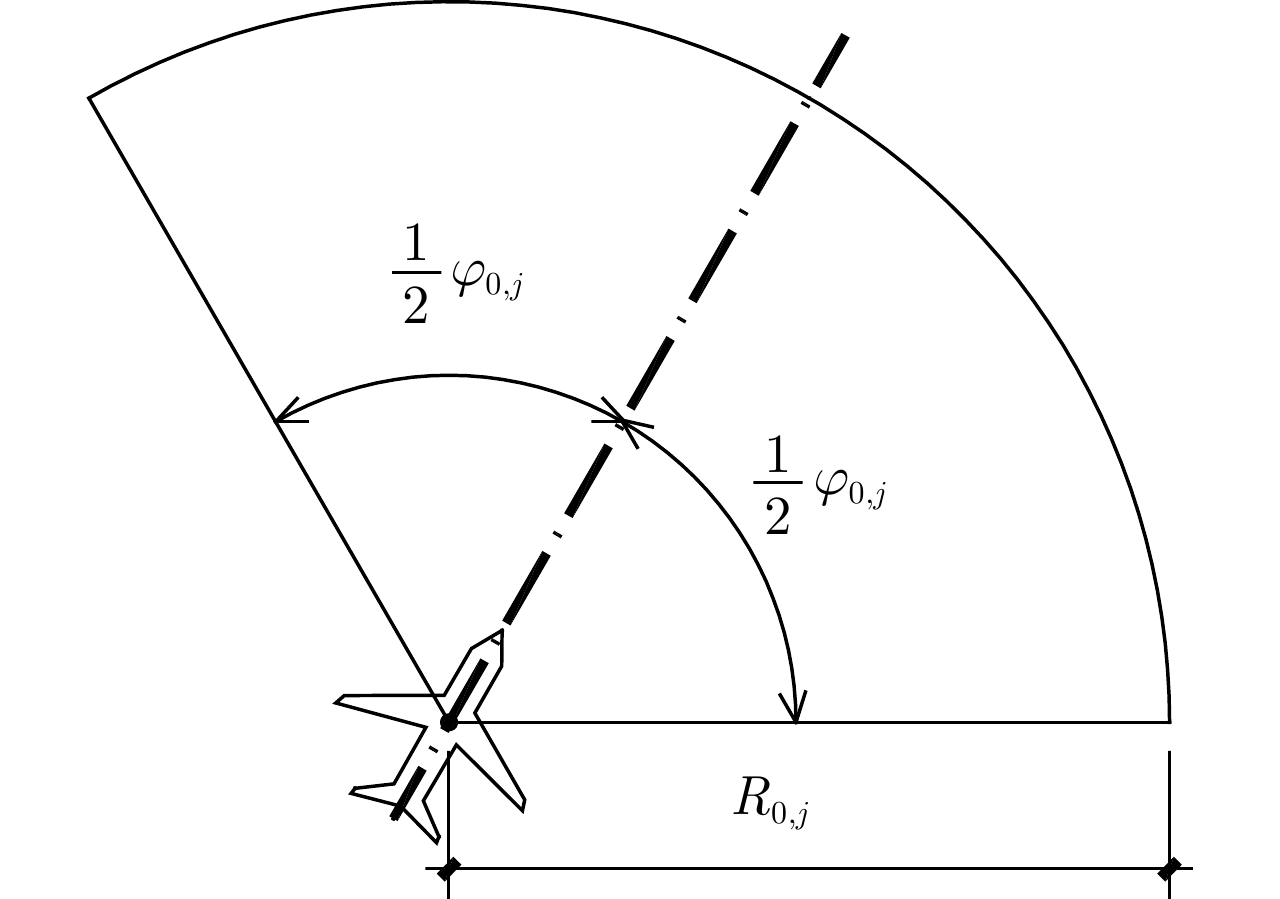
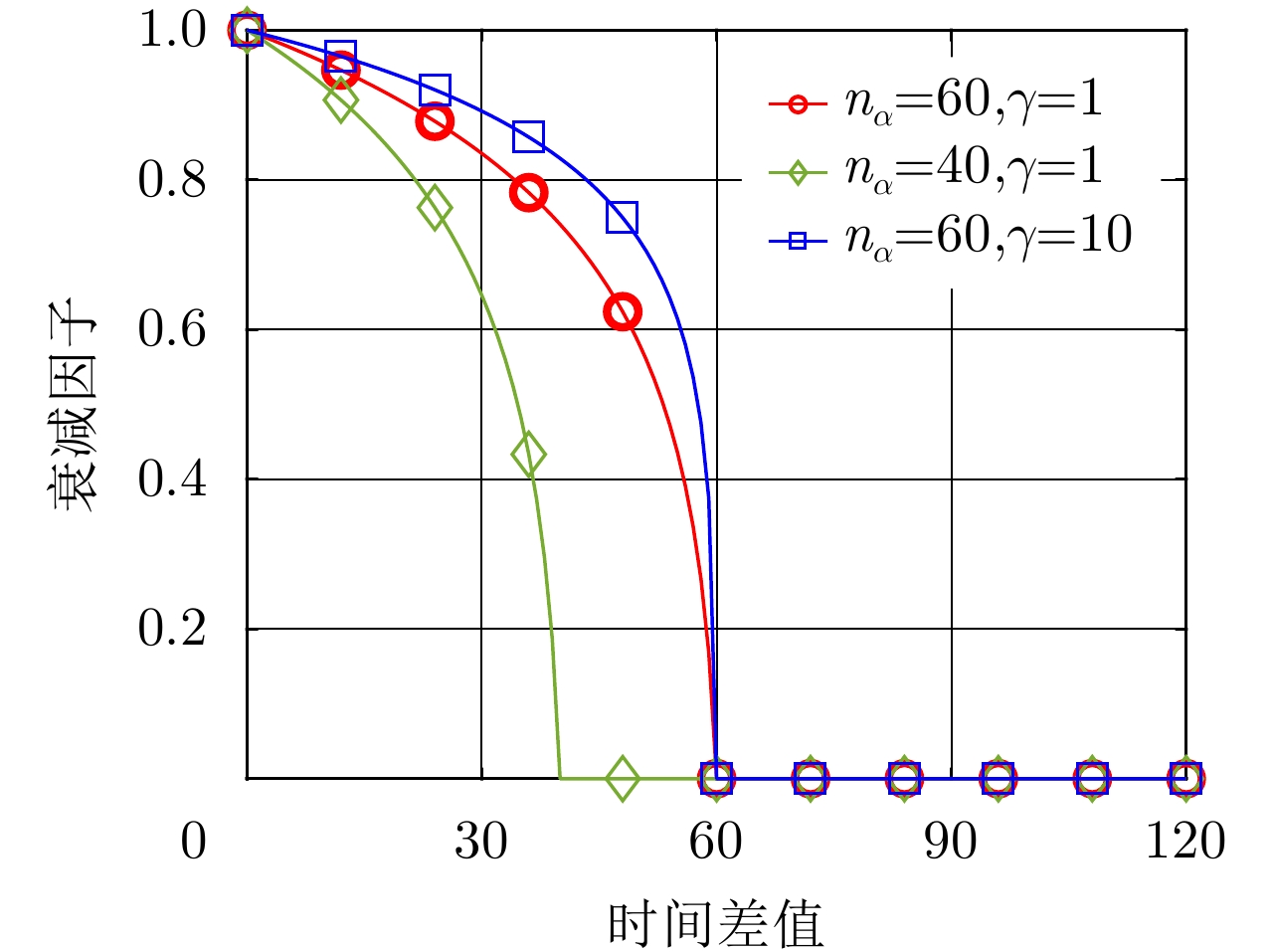
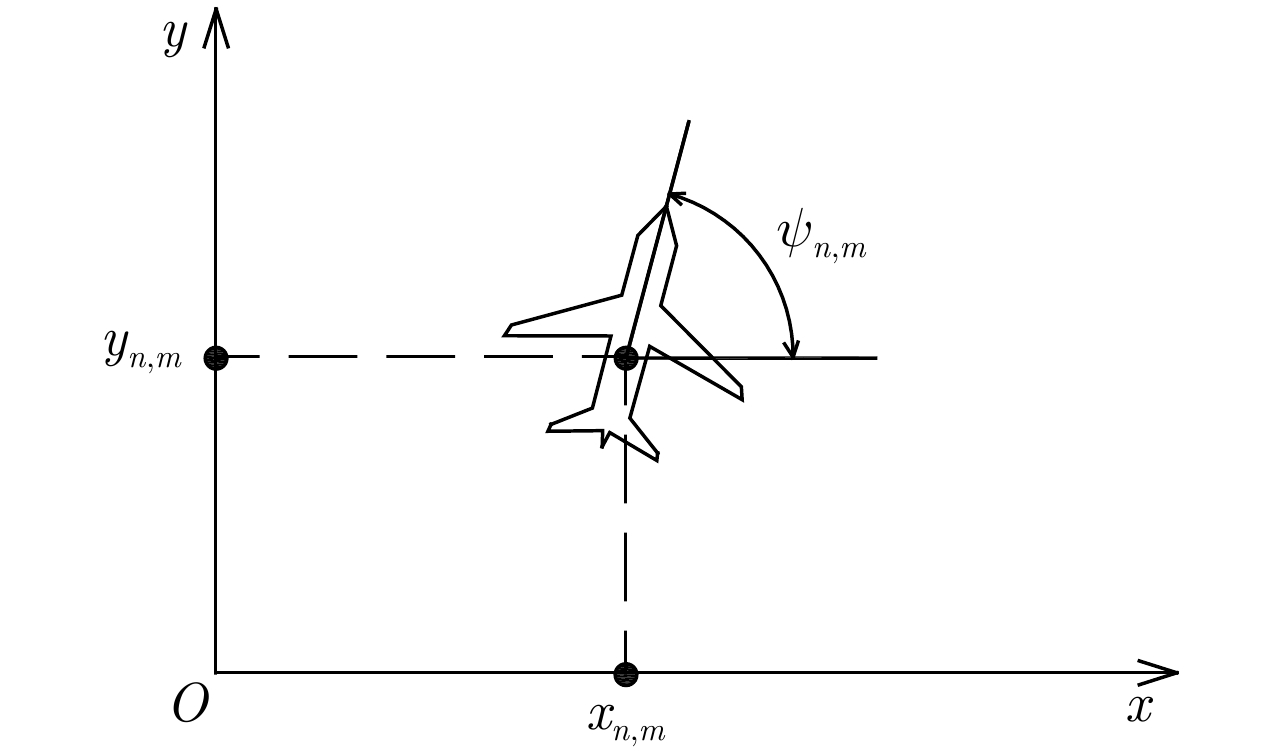
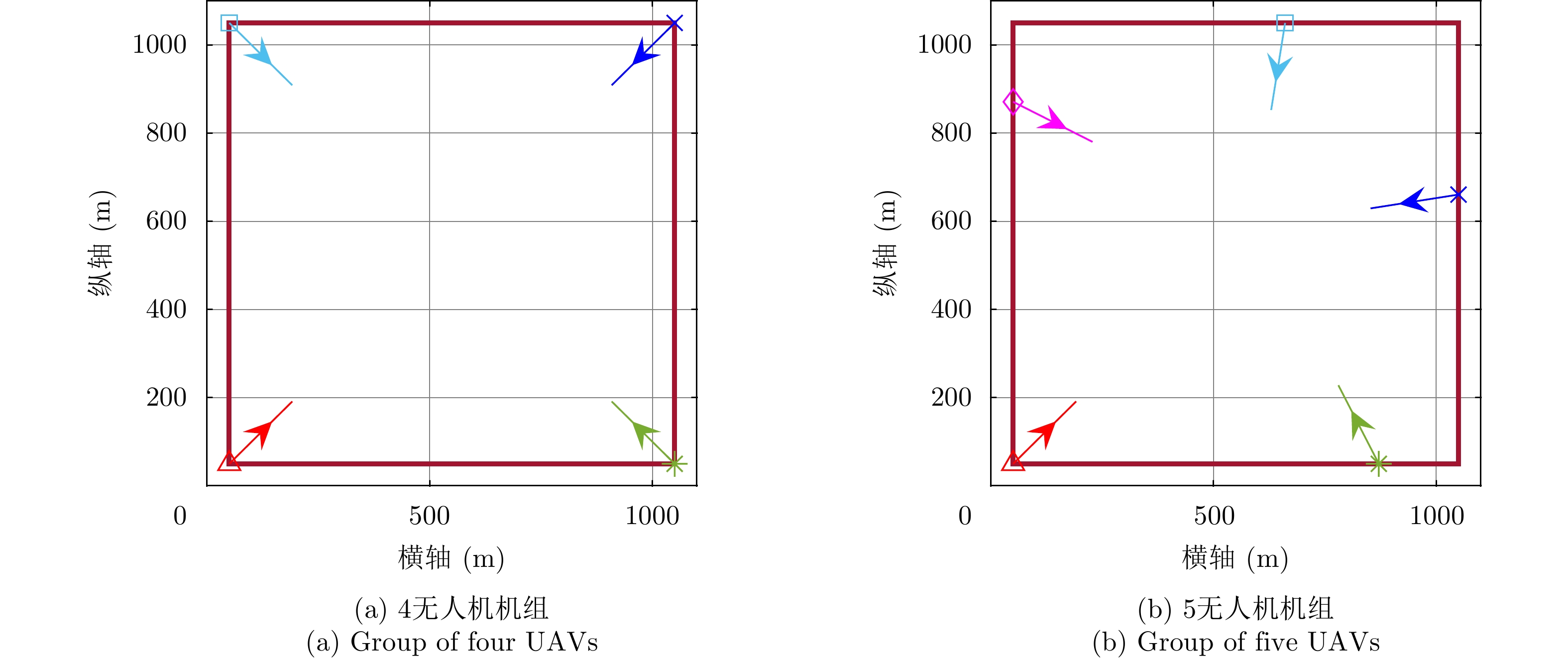
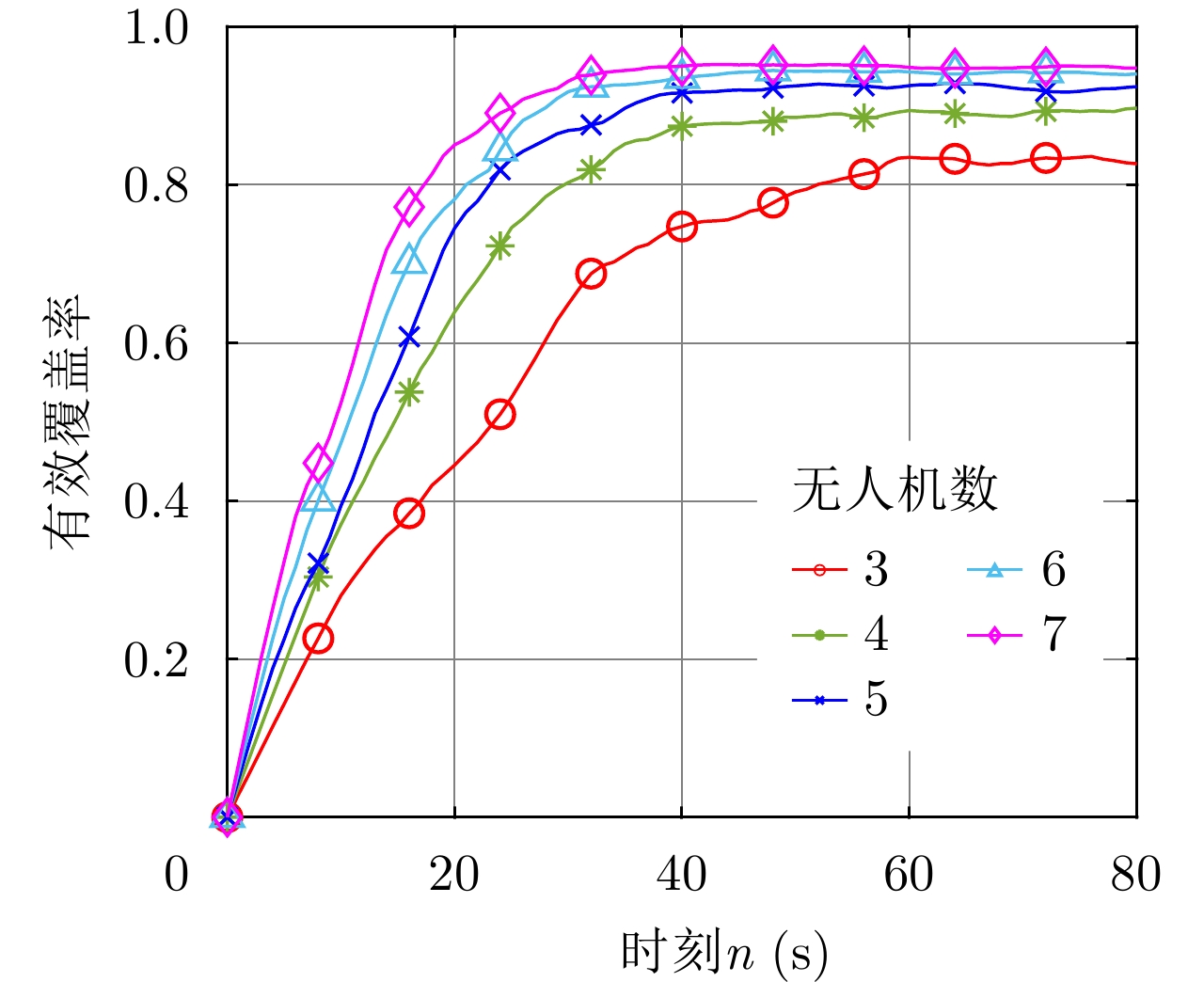
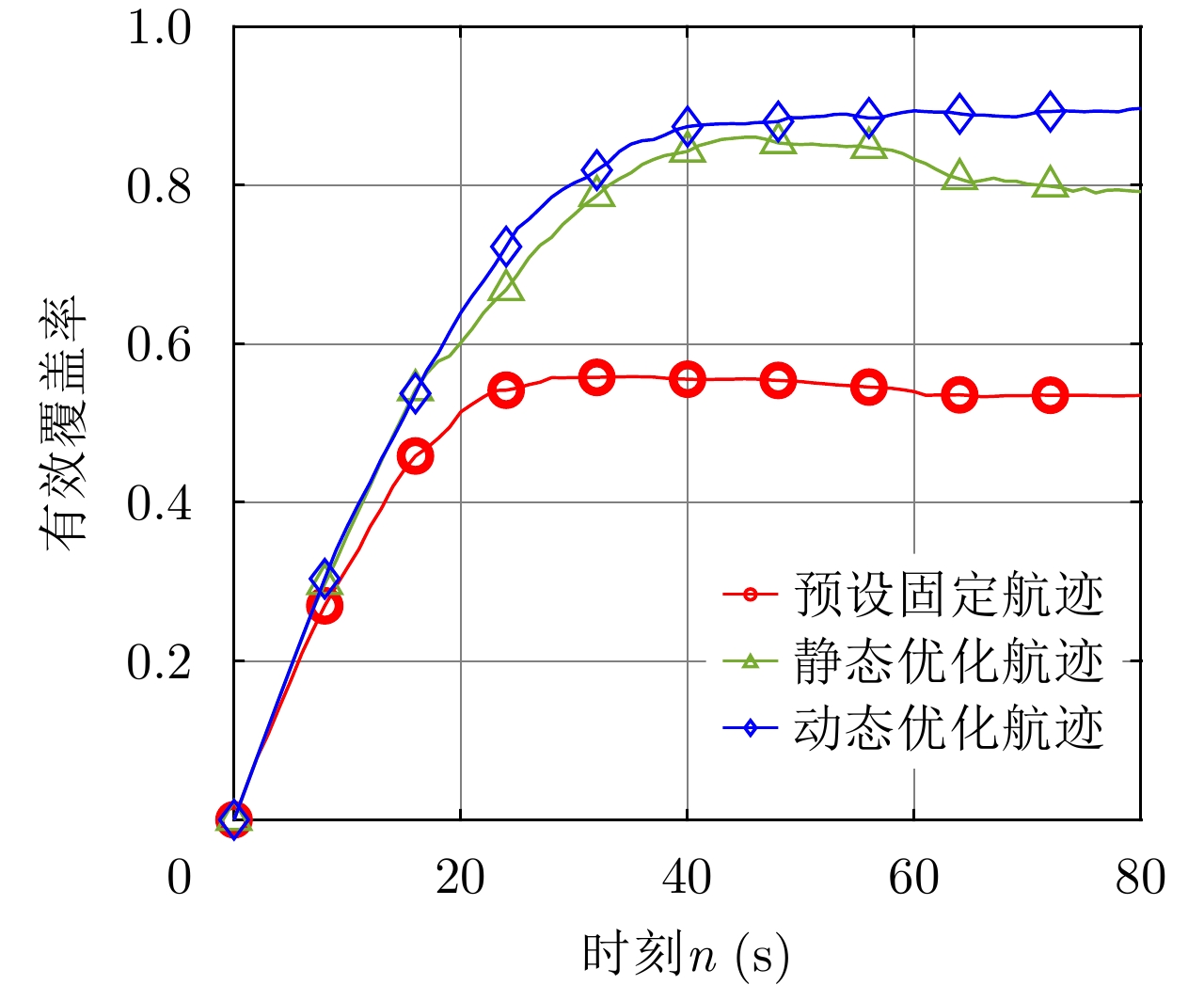
传统面向区域覆盖的多机航迹优化方法大多针对静态环境建立优化模型,在复杂动态环境下面临着模型失配的挑战。因此,该文提出了一种多机雷达协同区域动态覆盖航迹优化方法。首先,该方法引入衰减因子来表征机载雷达对动态环境的实际覆盖效果,将动态覆盖背景下的区域覆盖率作为优化函数,并结合待优化多维航迹控制参数约束,构建了多机雷达协同区域动态覆盖航迹优化的数学模型。然后,采用随机优化法对协同区域动态覆盖航迹优化问题进行了求解。最后,仿真实验表明,相对于采用预设航迹的多机雷达搜索模式,所提航迹优化方法能够显著提高动态区域的动态覆盖性能,且相较于面向静态环境的传统航迹优化模型,动态覆盖性能平均提升约6%。 传统面向区域覆盖的多机航迹优化方法大多针对静态环境建立优化模型,在复杂动态环境下面临着模型失配的挑战。因此,该文提出了一种多机雷达协同区域动态覆盖航迹优化方法。首先,该方法引入衰减因子来表征机载雷达对动态环境的实际覆盖效果,将动态覆盖背景下的区域覆盖率作为优化函数,并结合待优化多维航迹控制参数约束,构建了多机雷达协同区域动态覆盖航迹优化的数学模型。然后,采用随机优化法对协同区域动态覆盖航迹优化问题进行了求解。最后,仿真实验表明,相对于采用预设航迹的多机雷达搜索模式,所提航迹优化方法能够显著提高动态区域的动态覆盖性能,且相较于面向静态环境的传统航迹优化模型,动态覆盖性能平均提升约6%。
传统面向区域覆盖的多机航迹优化方法大多针对静态环境建立优化模型,在复杂动态环境下面临着模型失配的挑战。因此,该文提出了一种多机雷达协同区域动态覆盖航迹优化方法。首先,该方法引入衰减因子来表征机载雷达对动态环境的实际覆盖效果,将动态覆盖背景下的区域覆盖率作为优化函数,并结合待优化多维航迹控制参数约束,构建了多机雷达协同区域动态覆盖航迹优化的数学模型。然后,采用随机优化法对协同区域动态覆盖航迹优化问题进行了求解。最后,仿真实验表明,相对于采用预设航迹的多机雷达搜索模式,所提航迹优化方法能够显著提高动态区域的动态覆盖性能,且相较于面向静态环境的传统航迹优化模型,动态覆盖性能平均提升约6%。 传统面向区域覆盖的多机航迹优化方法大多针对静态环境建立优化模型,在复杂动态环境下面临着模型失配的挑战。因此,该文提出了一种多机雷达协同区域动态覆盖航迹优化方法。首先,该方法引入衰减因子来表征机载雷达对动态环境的实际覆盖效果,将动态覆盖背景下的区域覆盖率作为优化函数,并结合待优化多维航迹控制参数约束,构建了多机雷达协同区域动态覆盖航迹优化的数学模型。然后,采用随机优化法对协同区域动态覆盖航迹优化问题进行了求解。最后,仿真实验表明,相对于采用预设航迹的多机雷达搜索模式,所提航迹优化方法能够显著提高动态区域的动态覆盖性能,且相较于面向静态环境的传统航迹优化模型,动态覆盖性能平均提升约6%。



2023, 12(3): 550-562.
摘要:
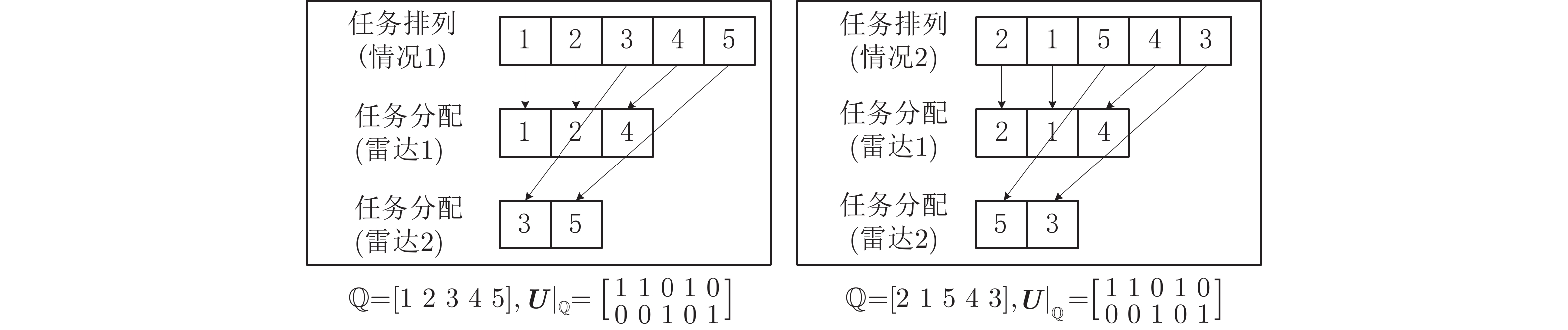
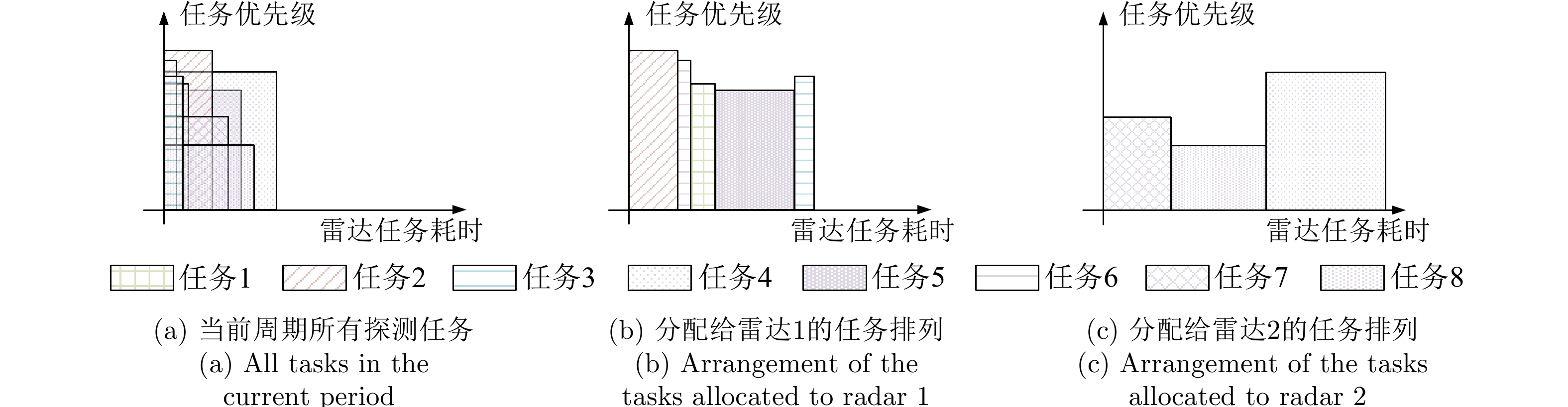
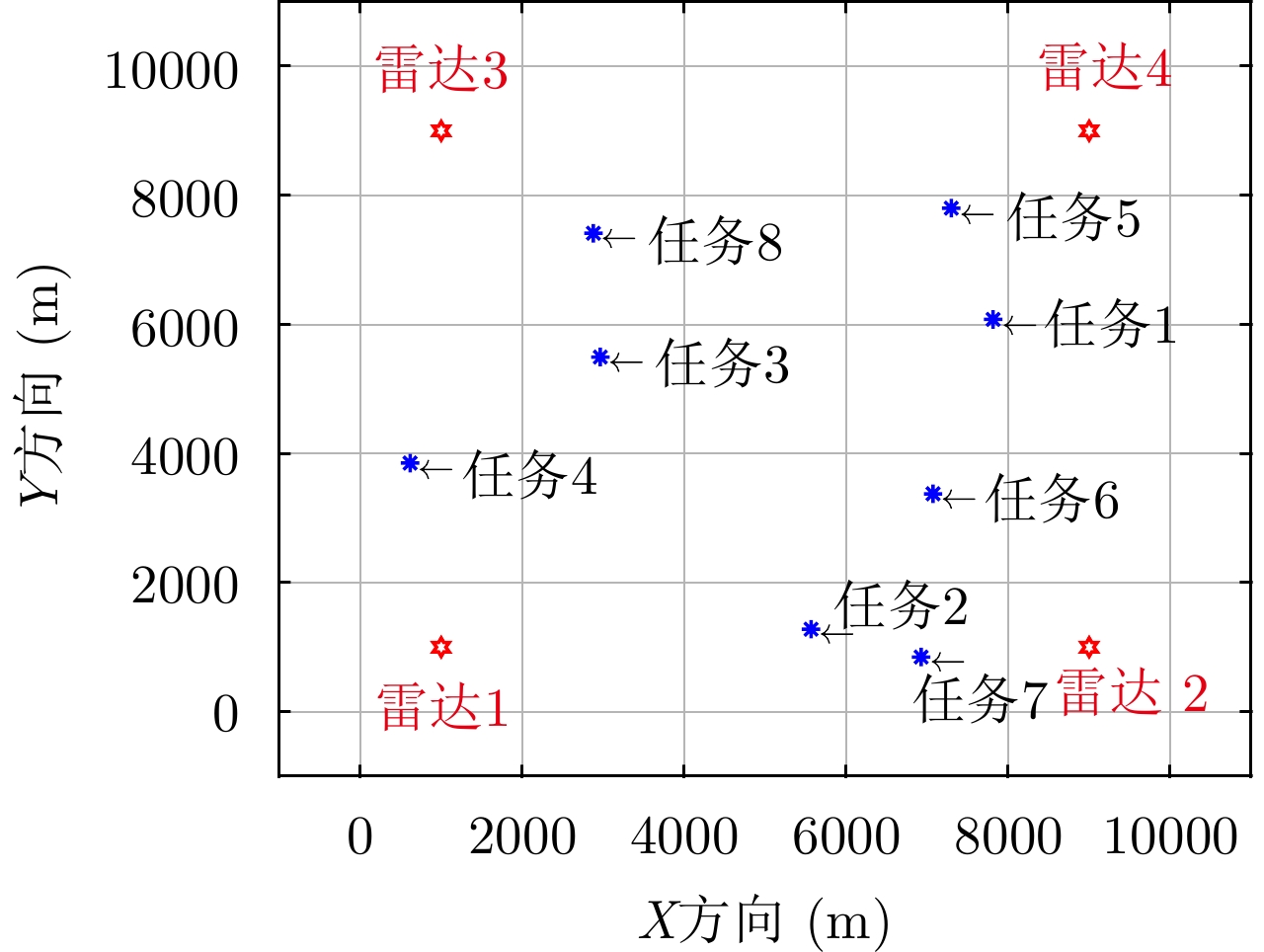
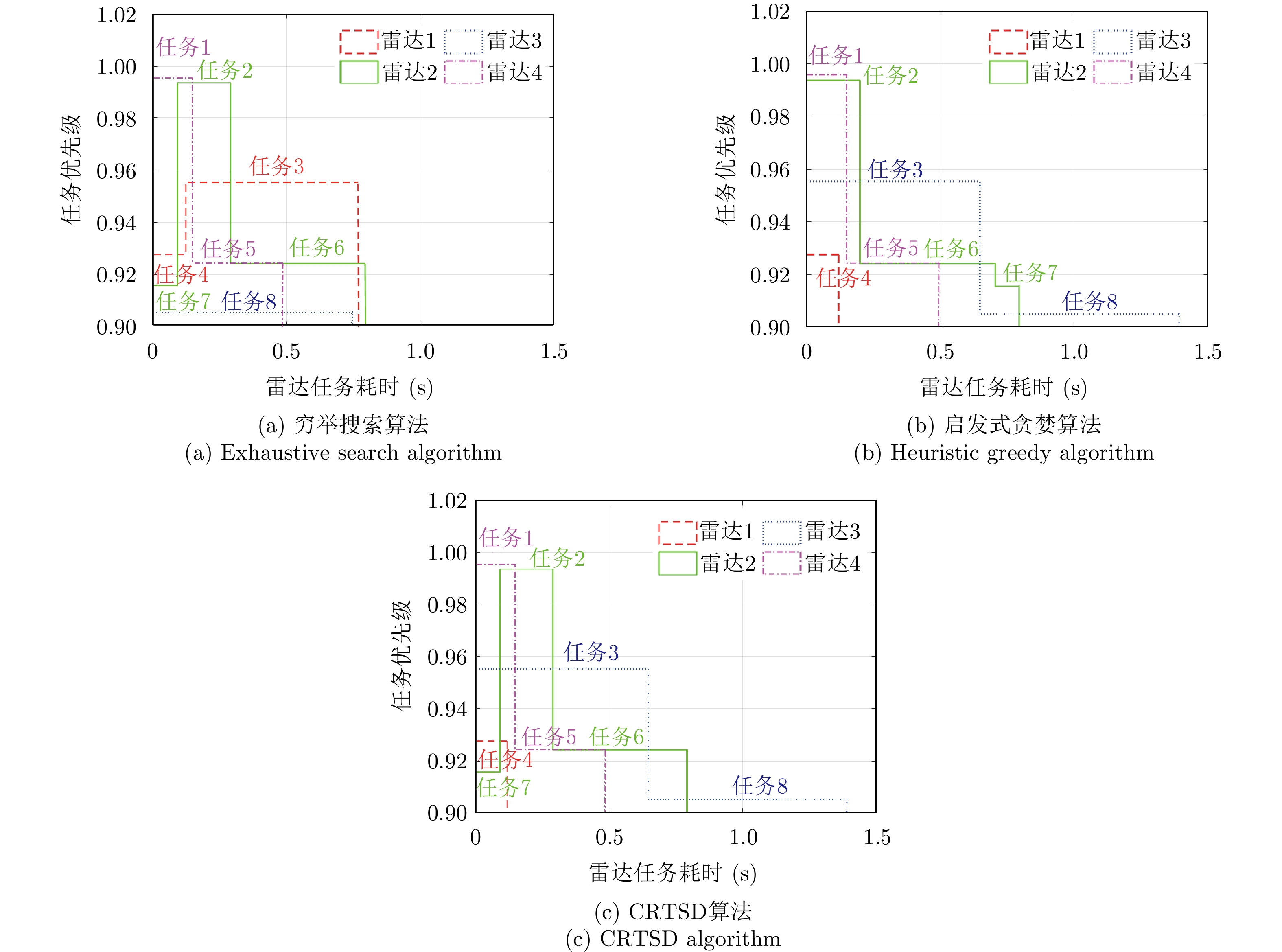
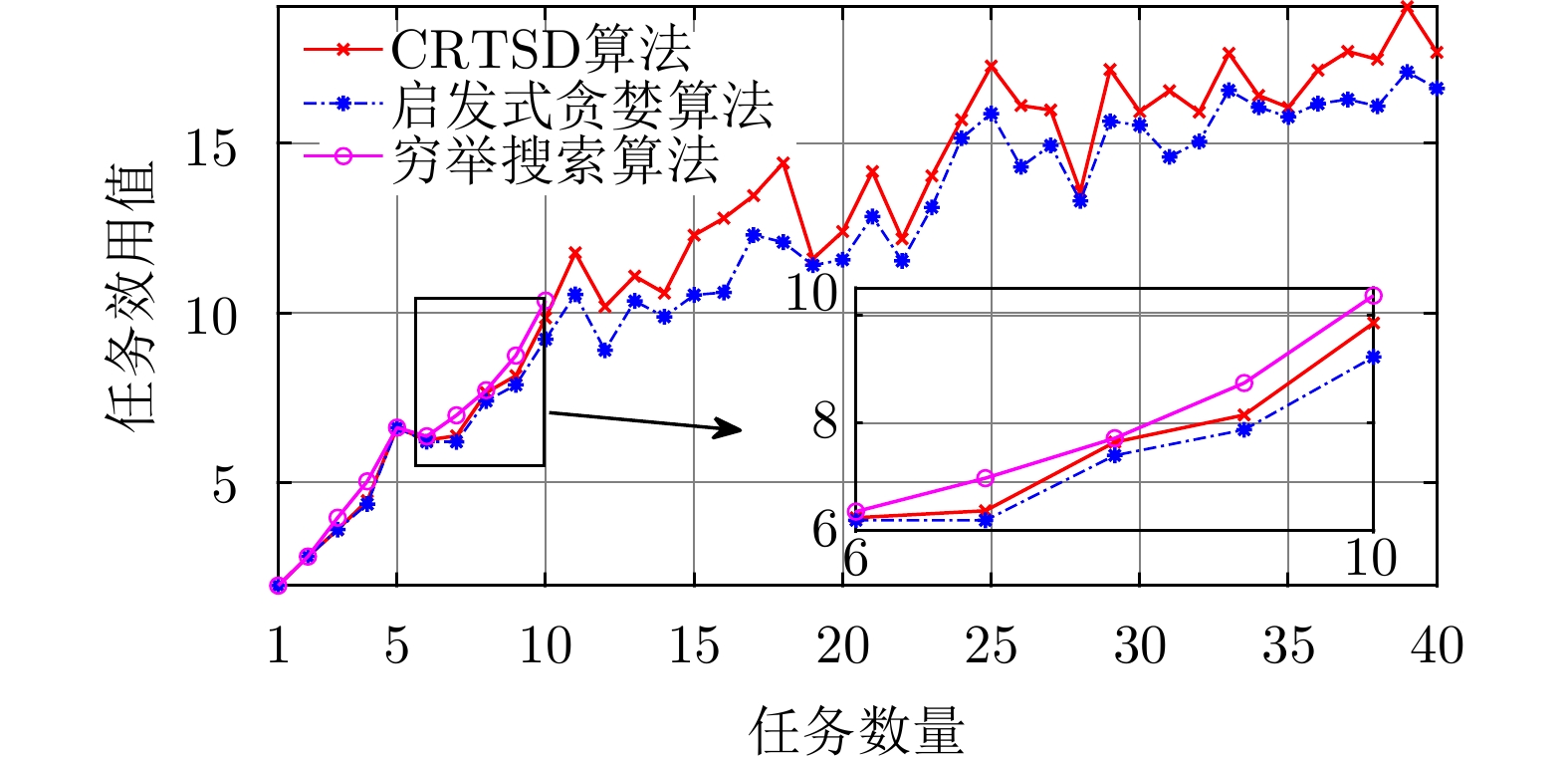
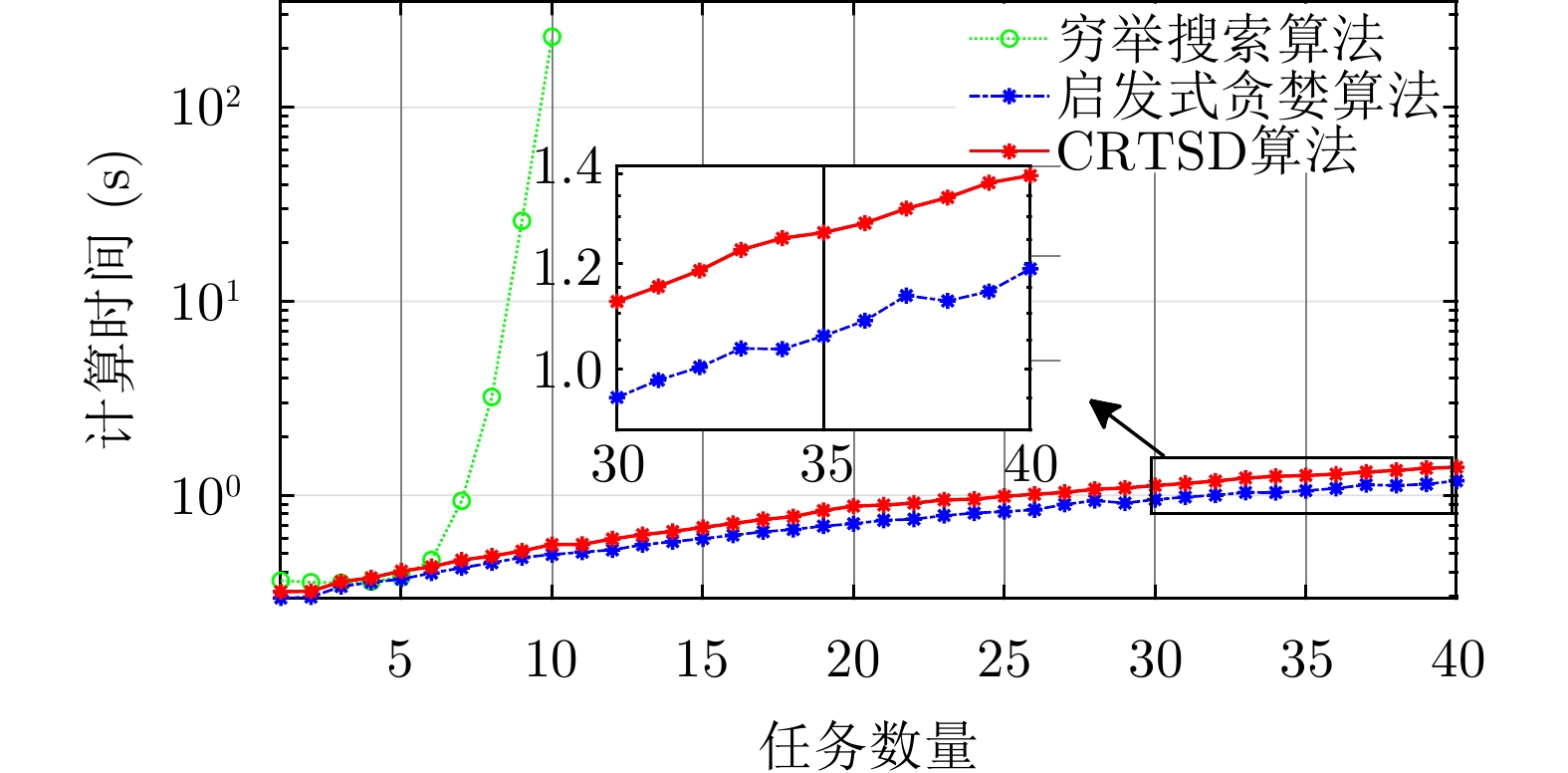
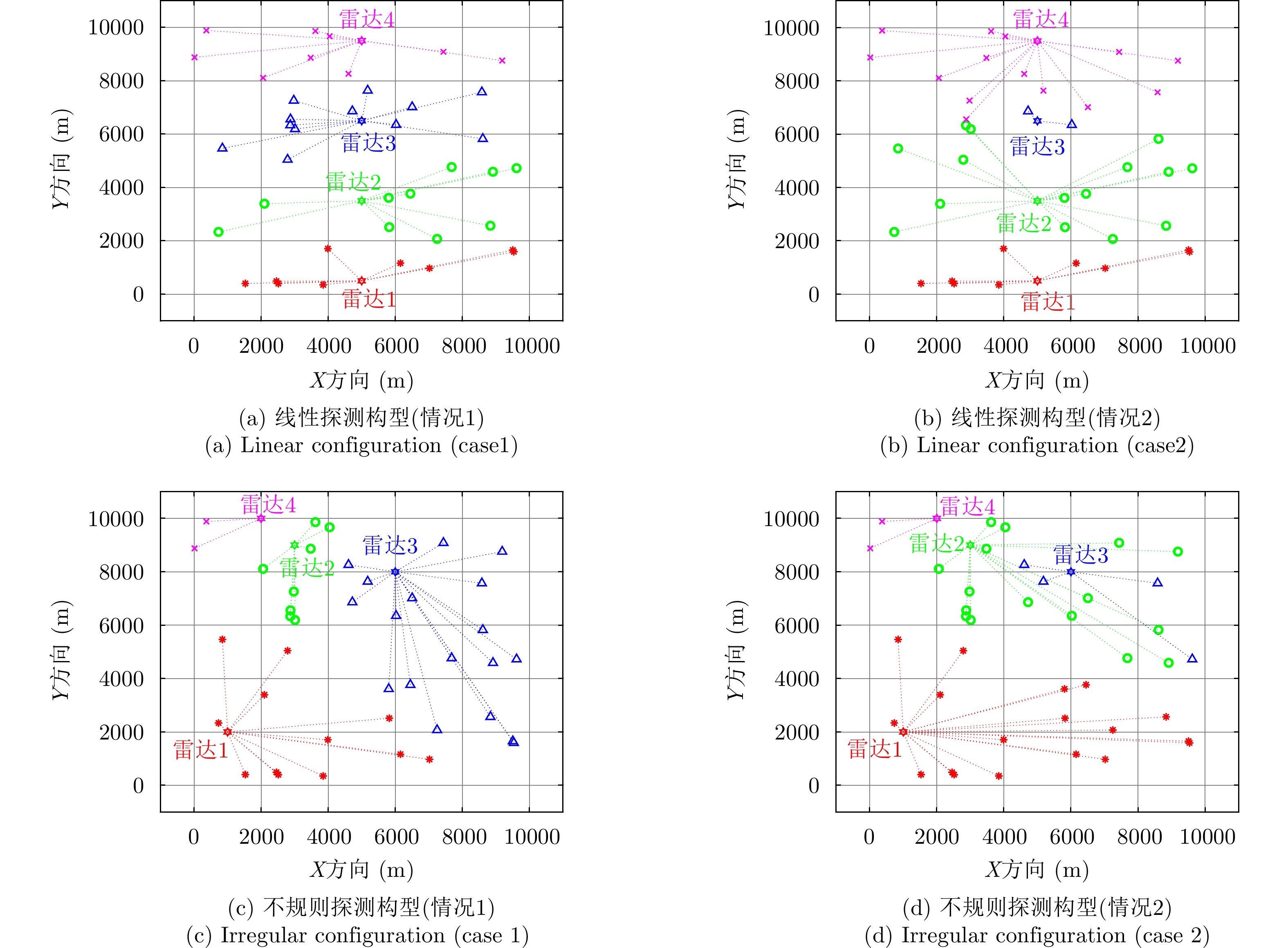
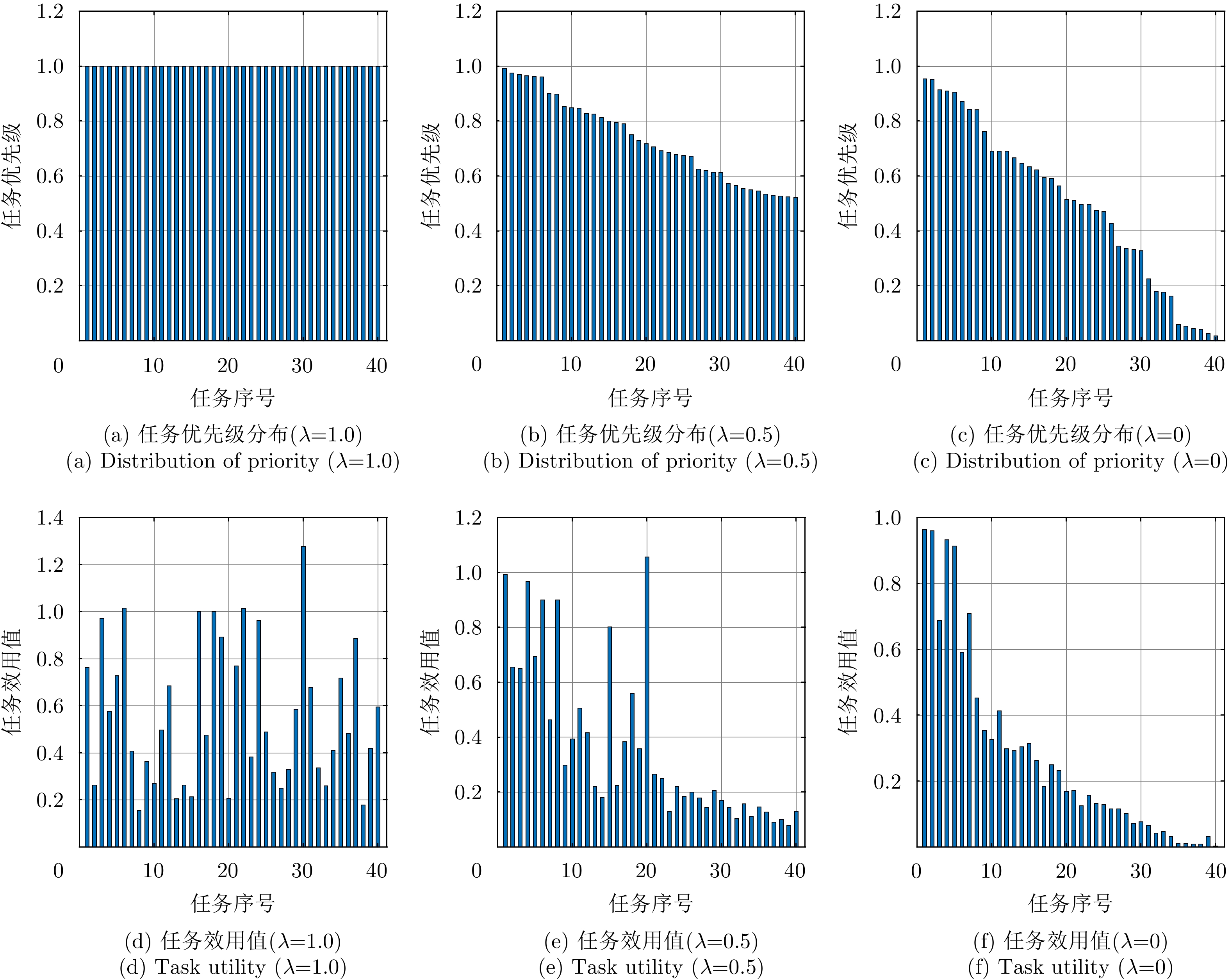
该文针对多雷达协同场景下的多任务实时规划问题,提出了一种基于任务效用最大化的多雷达协同在线任务规划模型。该模型以任务效用函数最大化为目标将多雷达协同任务分配建模成一个基于整数规划的多变量混合优化问题;随后提出了启发式穷举搜索算法和基于凸松弛的两步解耦算法,可在多项式时间内完成了该NP难优化问题的求解,且分别在优化性能和计算效率方面有所侧重。仿真实验表明,相比于可找到最优解的穷举搜索算法,该文提出算法可有效降低任务规划问题复杂度,提升问题求解效率,以满足在线任务分配的实时性要求。 该文针对多雷达协同场景下的多任务实时规划问题,提出了一种基于任务效用最大化的多雷达协同在线任务规划模型。该模型以任务效用函数最大化为目标将多雷达协同任务分配建模成一个基于整数规划的多变量混合优化问题;随后提出了启发式穷举搜索算法和基于凸松弛的两步解耦算法,可在多项式时间内完成了该NP难优化问题的求解,且分别在优化性能和计算效率方面有所侧重。仿真实验表明,相比于可找到最优解的穷举搜索算法,该文提出算法可有效降低任务规划问题复杂度,提升问题求解效率,以满足在线任务分配的实时性要求。
该文针对多雷达协同场景下的多任务实时规划问题,提出了一种基于任务效用最大化的多雷达协同在线任务规划模型。该模型以任务效用函数最大化为目标将多雷达协同任务分配建模成一个基于整数规划的多变量混合优化问题;随后提出了启发式穷举搜索算法和基于凸松弛的两步解耦算法,可在多项式时间内完成了该NP难优化问题的求解,且分别在优化性能和计算效率方面有所侧重。仿真实验表明,相比于可找到最优解的穷举搜索算法,该文提出算法可有效降低任务规划问题复杂度,提升问题求解效率,以满足在线任务分配的实时性要求。 该文针对多雷达协同场景下的多任务实时规划问题,提出了一种基于任务效用最大化的多雷达协同在线任务规划模型。该模型以任务效用函数最大化为目标将多雷达协同任务分配建模成一个基于整数规划的多变量混合优化问题;随后提出了启发式穷举搜索算法和基于凸松弛的两步解耦算法,可在多项式时间内完成了该NP难优化问题的求解,且分别在优化性能和计算效率方面有所侧重。仿真实验表明,相比于可找到最优解的穷举搜索算法,该文提出算法可有效降低任务规划问题复杂度,提升问题求解效率,以满足在线任务分配的实时性要求。


2023, 12(3): 563-575.
摘要:
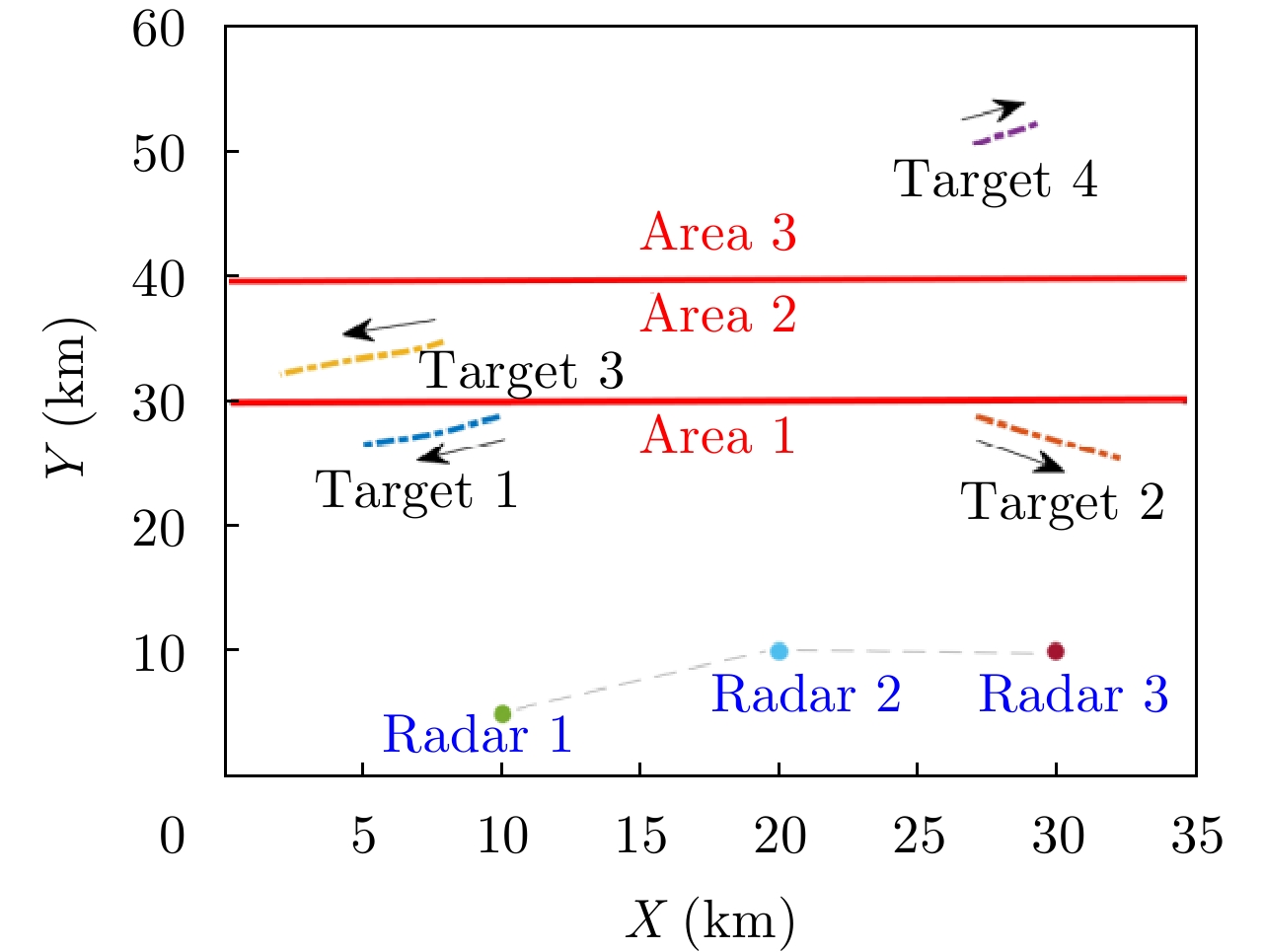
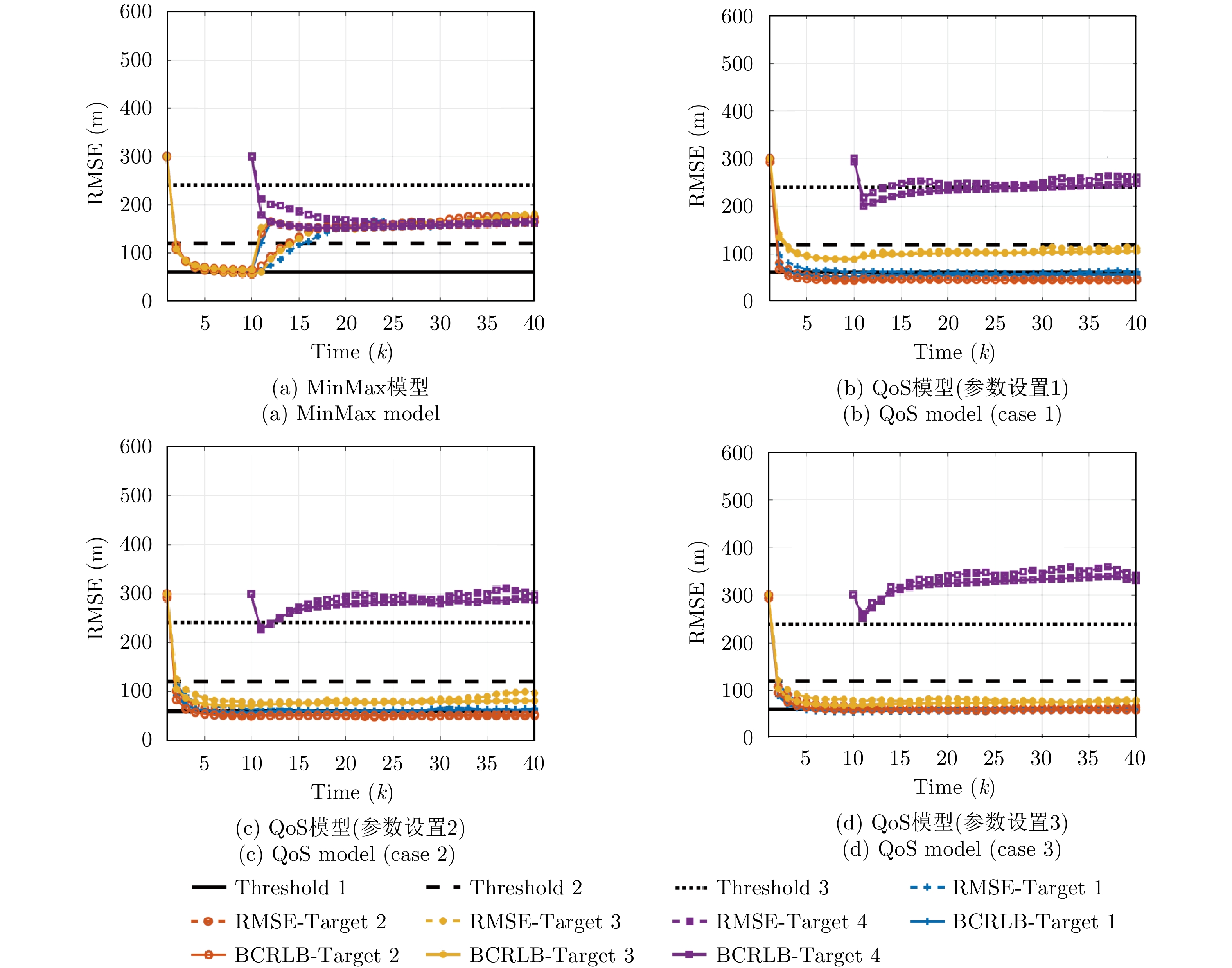
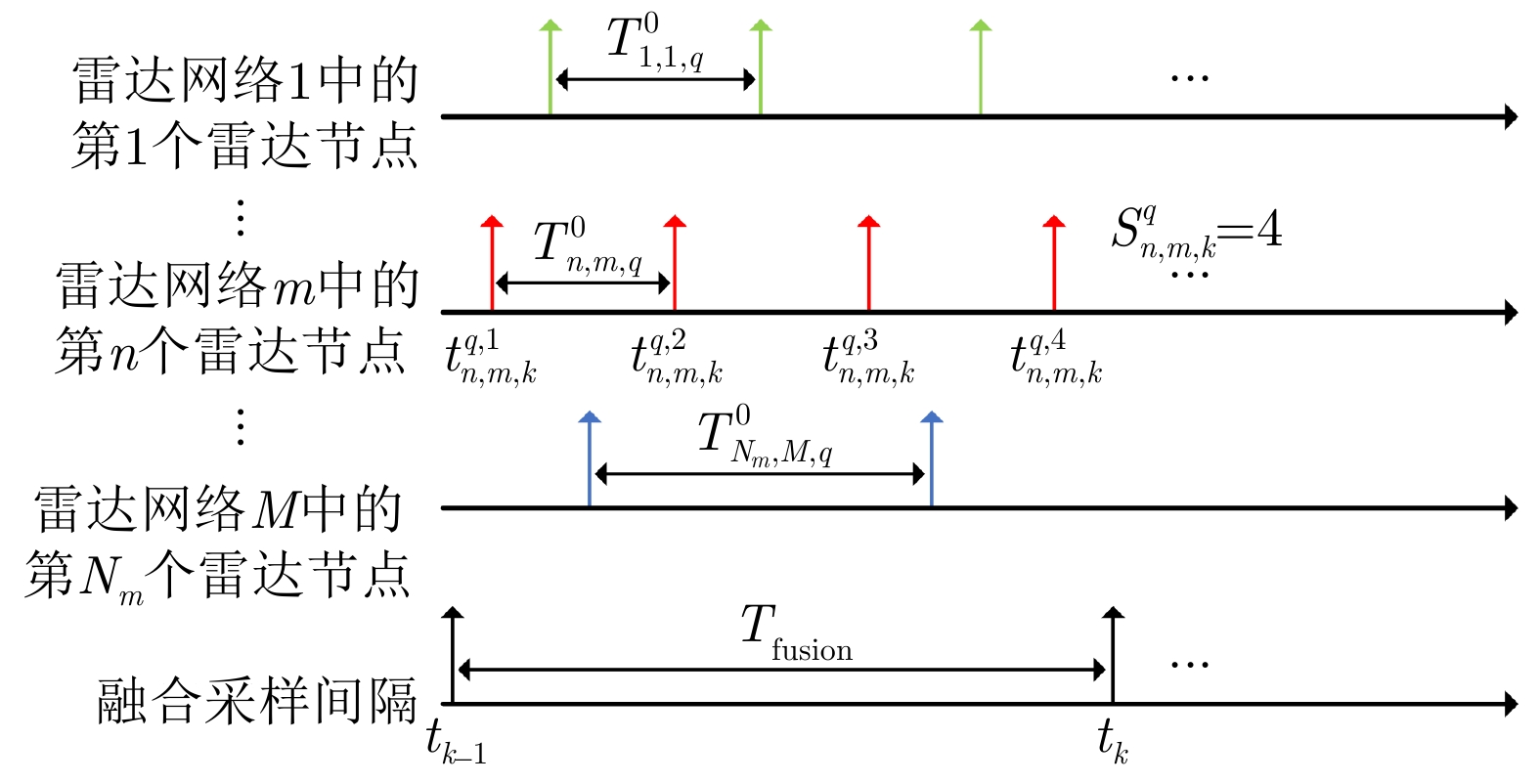
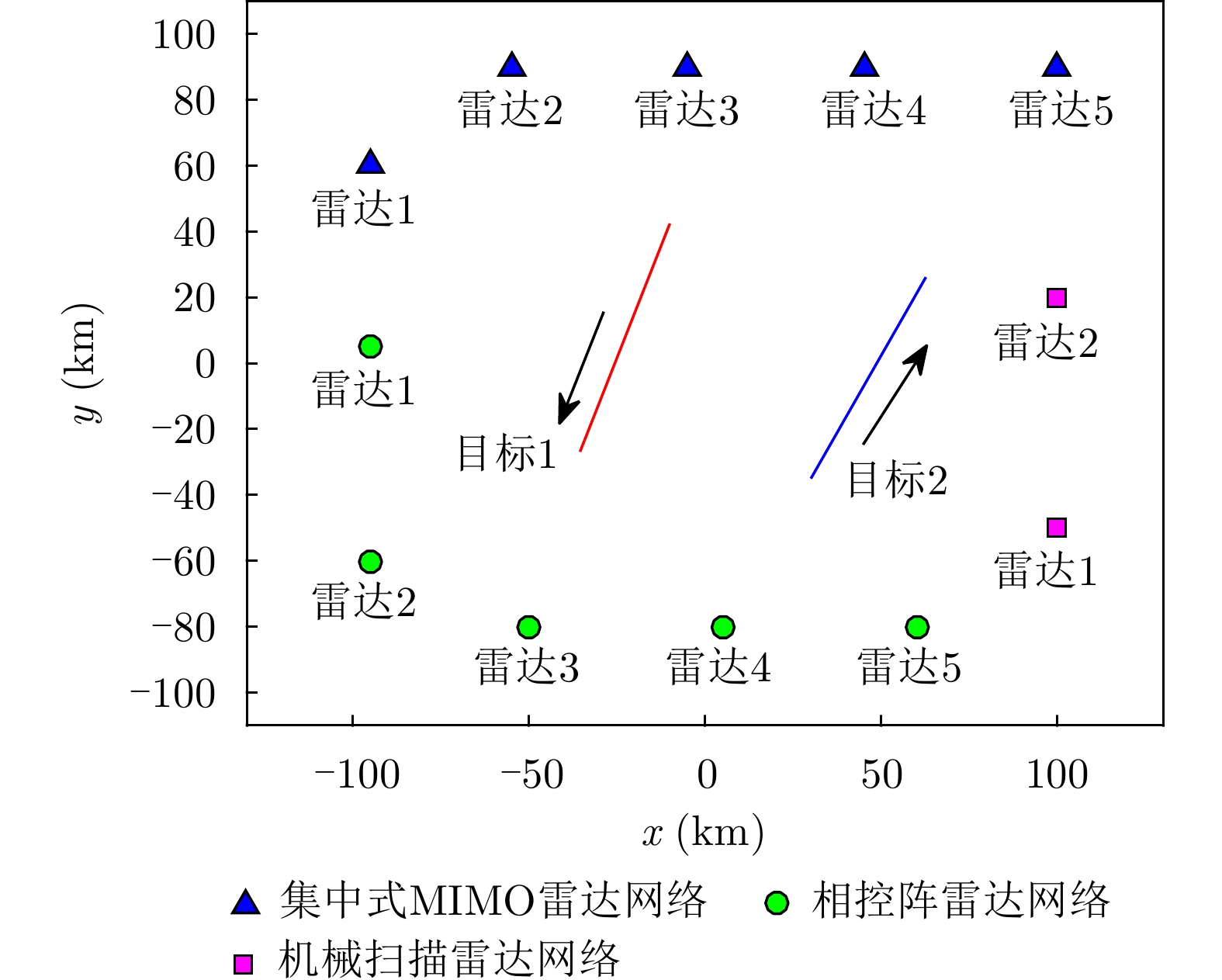
该文针对异步多目标跟踪场景,研究了非理想检测下的异构多雷达网络功率时间联合优化问题。首先,将各融合采样间隔内得到的来自不同雷达节点的所有异步量测信息融合为复合量测信息,结合该复合量测信息推导了非理想检测下包含雷达节点选择、辐射功率和驻留时间等参数的异步目标跟踪误差贝叶斯克拉美罗下界(BCRLB)解析表达式,并将其作为异步多目标跟踪精度的衡量指标。在此基础上,建立了非理想检测下面向异步多目标跟踪的异构多雷达网络功率时间联合优化模型,即以最小化异步多目标跟踪误差为优化目标,以满足给定的系统辐射资源限制为约束条件,对不同雷达网络中雷达节点的选择方式、辐射功率和驻留时间等发射参数进行自适应联合优化设计,从而提升异构多雷达网络的异步多目标跟踪精度。最后,针对上述优化问题,结合序列二次规划(SQP)算法和循环最小法,采用四步分解算法进行求解。仿真结果表明,与现有算法相比,所提算法能够有效提升异构多雷达网络的异步多目标跟踪精度。 该文针对异步多目标跟踪场景,研究了非理想检测下的异构多雷达网络功率时间联合优化问题。首先,将各融合采样间隔内得到的来自不同雷达节点的所有异步量测信息融合为复合量测信息,结合该复合量测信息推导了非理想检测下包含雷达节点选择、辐射功率和驻留时间等参数的异步目标跟踪误差贝叶斯克拉美罗下界(BCRLB)解析表达式,并将其作为异步多目标跟踪精度的衡量指标。在此基础上,建立了非理想检测下面向异步多目标跟踪的异构多雷达网络功率时间联合优化模型,即以最小化异步多目标跟踪误差为优化目标,以满足给定的系统辐射资源限制为约束条件,对不同雷达网络中雷达节点的选择方式、辐射功率和驻留时间等发射参数进行自适应联合优化设计,从而提升异构多雷达网络的异步多目标跟踪精度。最后,针对上述优化问题,结合序列二次规划(SQP)算法和循环最小法,采用四步分解算法进行求解。仿真结果表明,与现有算法相比,所提算法能够有效提升异构多雷达网络的异步多目标跟踪精度。
该文针对异步多目标跟踪场景,研究了非理想检测下的异构多雷达网络功率时间联合优化问题。首先,将各融合采样间隔内得到的来自不同雷达节点的所有异步量测信息融合为复合量测信息,结合该复合量测信息推导了非理想检测下包含雷达节点选择、辐射功率和驻留时间等参数的异步目标跟踪误差贝叶斯克拉美罗下界(BCRLB)解析表达式,并将其作为异步多目标跟踪精度的衡量指标。在此基础上,建立了非理想检测下面向异步多目标跟踪的异构多雷达网络功率时间联合优化模型,即以最小化异步多目标跟踪误差为优化目标,以满足给定的系统辐射资源限制为约束条件,对不同雷达网络中雷达节点的选择方式、辐射功率和驻留时间等发射参数进行自适应联合优化设计,从而提升异构多雷达网络的异步多目标跟踪精度。最后,针对上述优化问题,结合序列二次规划(SQP)算法和循环最小法,采用四步分解算法进行求解。仿真结果表明,与现有算法相比,所提算法能够有效提升异构多雷达网络的异步多目标跟踪精度。 该文针对异步多目标跟踪场景,研究了非理想检测下的异构多雷达网络功率时间联合优化问题。首先,将各融合采样间隔内得到的来自不同雷达节点的所有异步量测信息融合为复合量测信息,结合该复合量测信息推导了非理想检测下包含雷达节点选择、辐射功率和驻留时间等参数的异步目标跟踪误差贝叶斯克拉美罗下界(BCRLB)解析表达式,并将其作为异步多目标跟踪精度的衡量指标。在此基础上,建立了非理想检测下面向异步多目标跟踪的异构多雷达网络功率时间联合优化模型,即以最小化异步多目标跟踪误差为优化目标,以满足给定的系统辐射资源限制为约束条件,对不同雷达网络中雷达节点的选择方式、辐射功率和驻留时间等发射参数进行自适应联合优化设计,从而提升异构多雷达网络的异步多目标跟踪精度。最后,针对上述优化问题,结合序列二次规划(SQP)算法和循环最小法,采用四步分解算法进行求解。仿真结果表明,与现有算法相比,所提算法能够有效提升异构多雷达网络的异步多目标跟踪精度。


2023, 12(3): 576-589.
摘要:
该文建立混合分布式相控阵-多输入多输出(PA-MIMO)雷达系统模型,推导出基于Neyman-Pearson (NP)准则的似然比检测(LRT)器,在收发两端实施子阵级和阵元级优化部署,达到对雷达系统中相参增益和空间分集增益协调优化的目的。针对整数规划的子阵、阵元部署模型,提出基于量子粒子群优化的随机取整(SR-QPSO)求解算法,在较少的迭代步骤内获得最优阵元配置策略,实现子阵级和阵元级之间的联合优化。最后,通过对3个典型优化问题进行数值仿真,所提出的混合分布式PA-MIMO雷达系统优化配置较其他典型雷达系统有较大提升,探测概率达到0.98,有效距离达到1166.3 km,探测性能得到显著提升。 该文建立混合分布式相控阵-多输入多输出(PA-MIMO)雷达系统模型,推导出基于Neyman-Pearson (NP)准则的似然比检测(LRT)器,在收发两端实施子阵级和阵元级优化部署,达到对雷达系统中相参增益和空间分集增益协调优化的目的。针对整数规划的子阵、阵元部署模型,提出基于量子粒子群优化的随机取整(SR-QPSO)求解算法,在较少的迭代步骤内获得最优阵元配置策略,实现子阵级和阵元级之间的联合优化。最后,通过对3个典型优化问题进行数值仿真,所提出的混合分布式PA-MIMO雷达系统优化配置较其他典型雷达系统有较大提升,探测概率达到0.98,有效距离达到1166.3 km,探测性能得到显著提升。
该文建立混合分布式相控阵-多输入多输出(PA-MIMO)雷达系统模型,推导出基于Neyman-Pearson (NP)准则的似然比检测(LRT)器,在收发两端实施子阵级和阵元级优化部署,达到对雷达系统中相参增益和空间分集增益协调优化的目的。针对整数规划的子阵、阵元部署模型,提出基于量子粒子群优化的随机取整(SR-QPSO)求解算法,在较少的迭代步骤内获得最优阵元配置策略,实现子阵级和阵元级之间的联合优化。最后,通过对3个典型优化问题进行数值仿真,所提出的混合分布式PA-MIMO雷达系统优化配置较其他典型雷达系统有较大提升,探测概率达到0.98,有效距离达到1166.3 km,探测性能得到显著提升。 该文建立混合分布式相控阵-多输入多输出(PA-MIMO)雷达系统模型,推导出基于Neyman-Pearson (NP)准则的似然比检测(LRT)器,在收发两端实施子阵级和阵元级优化部署,达到对雷达系统中相参增益和空间分集增益协调优化的目的。针对整数规划的子阵、阵元部署模型,提出基于量子粒子群优化的随机取整(SR-QPSO)求解算法,在较少的迭代步骤内获得最优阵元配置策略,实现子阵级和阵元级之间的联合优化。最后,通过对3个典型优化问题进行数值仿真,所提出的混合分布式PA-MIMO雷达系统优化配置较其他典型雷达系统有较大提升,探测概率达到0.98,有效距离达到1166.3 km,探测性能得到显著提升。



2023, 12(3): 590-601.
摘要:
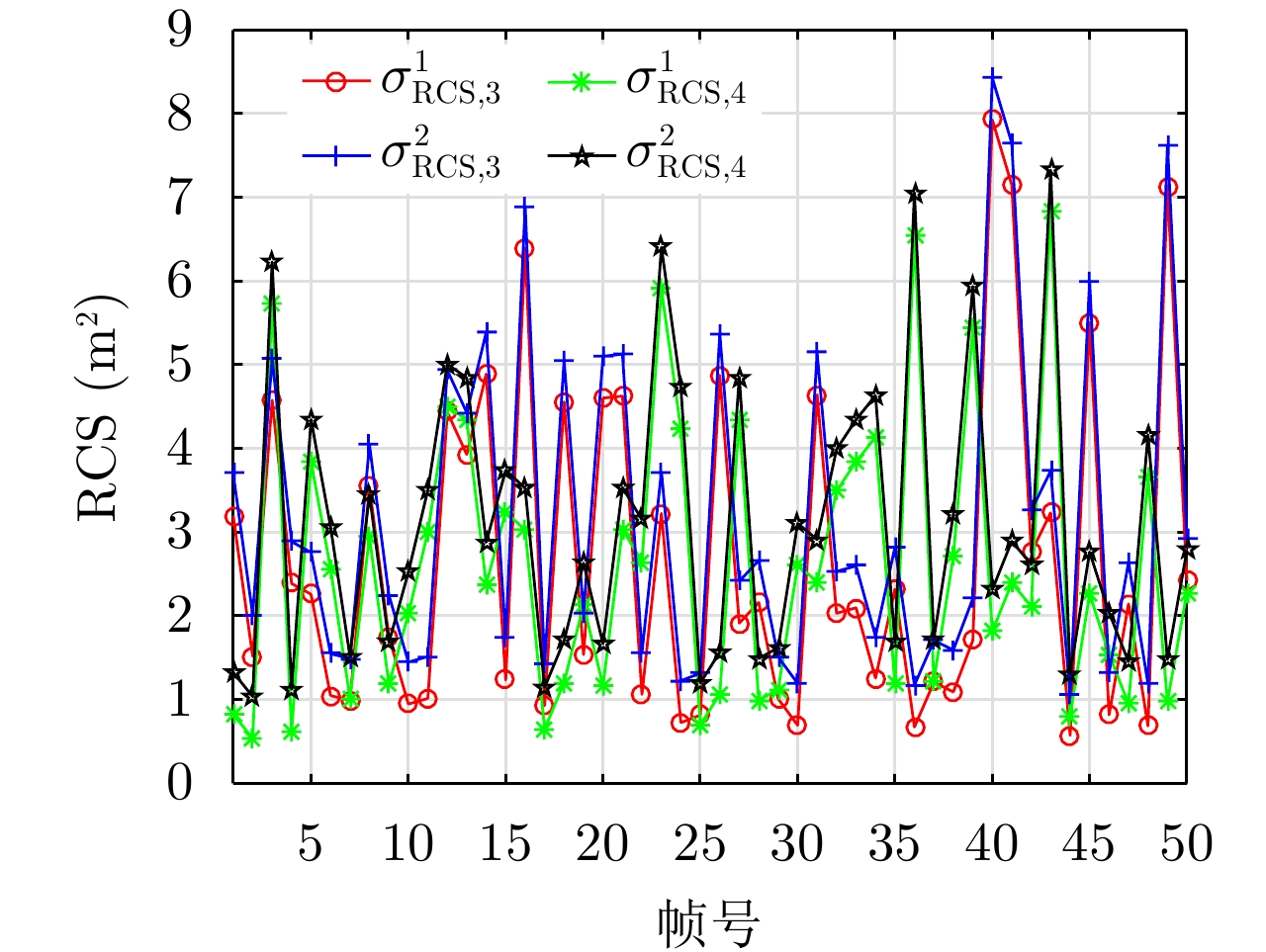
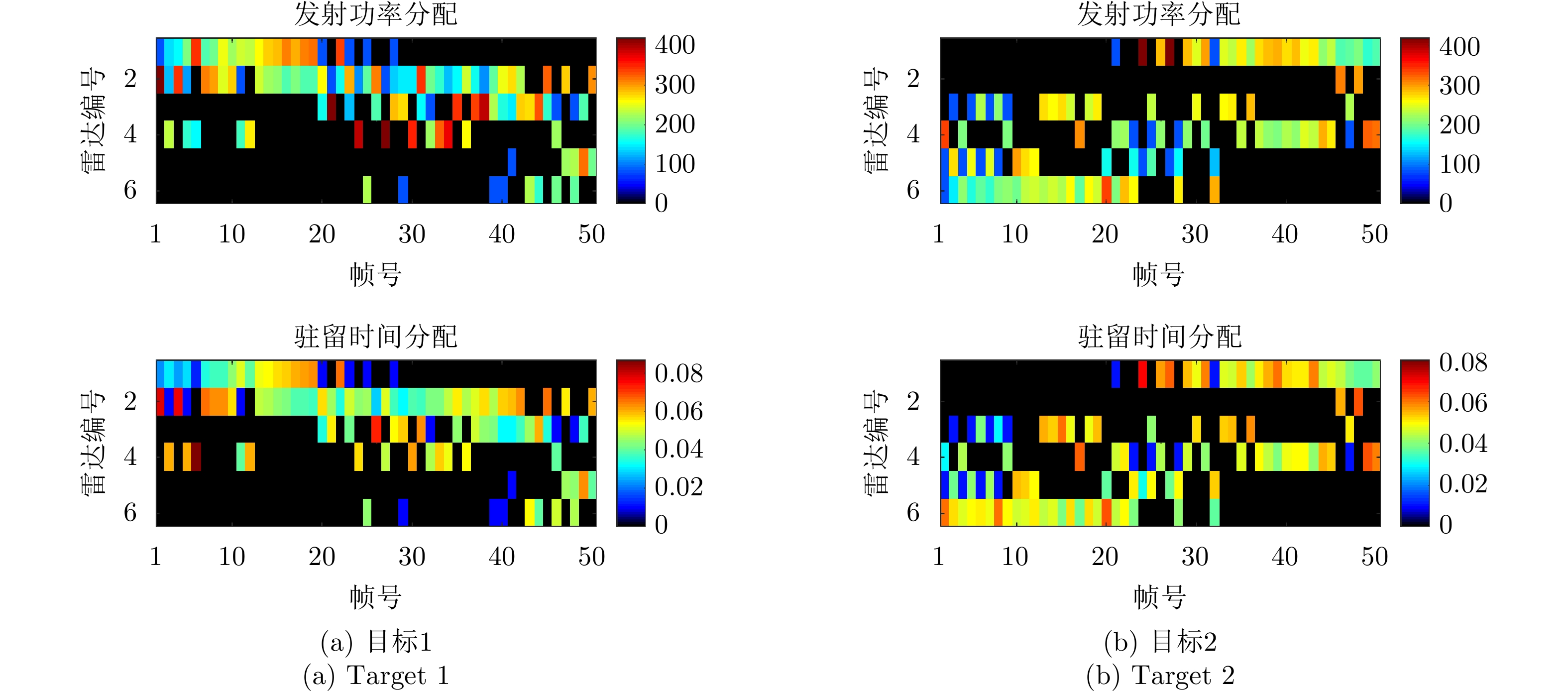
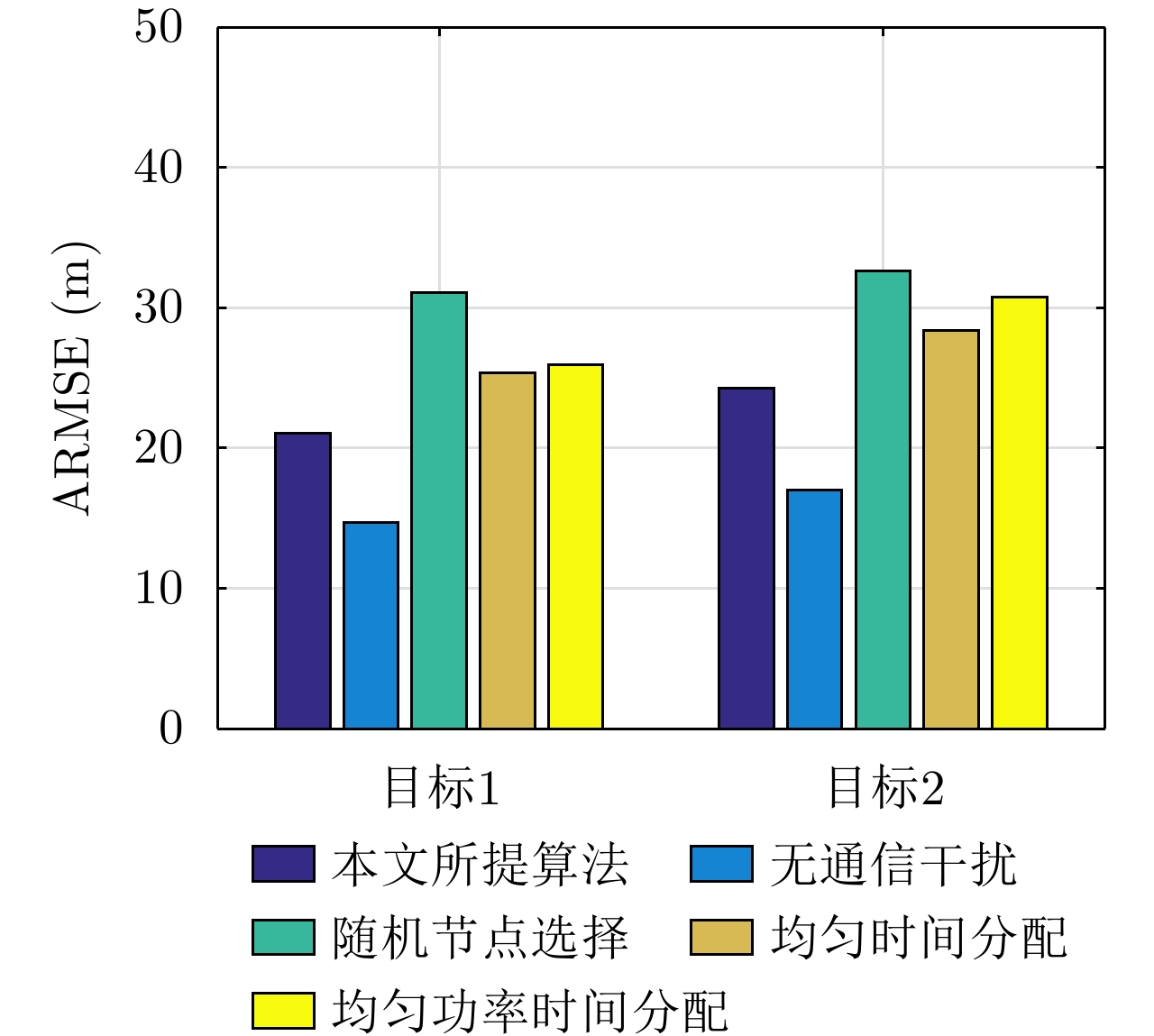
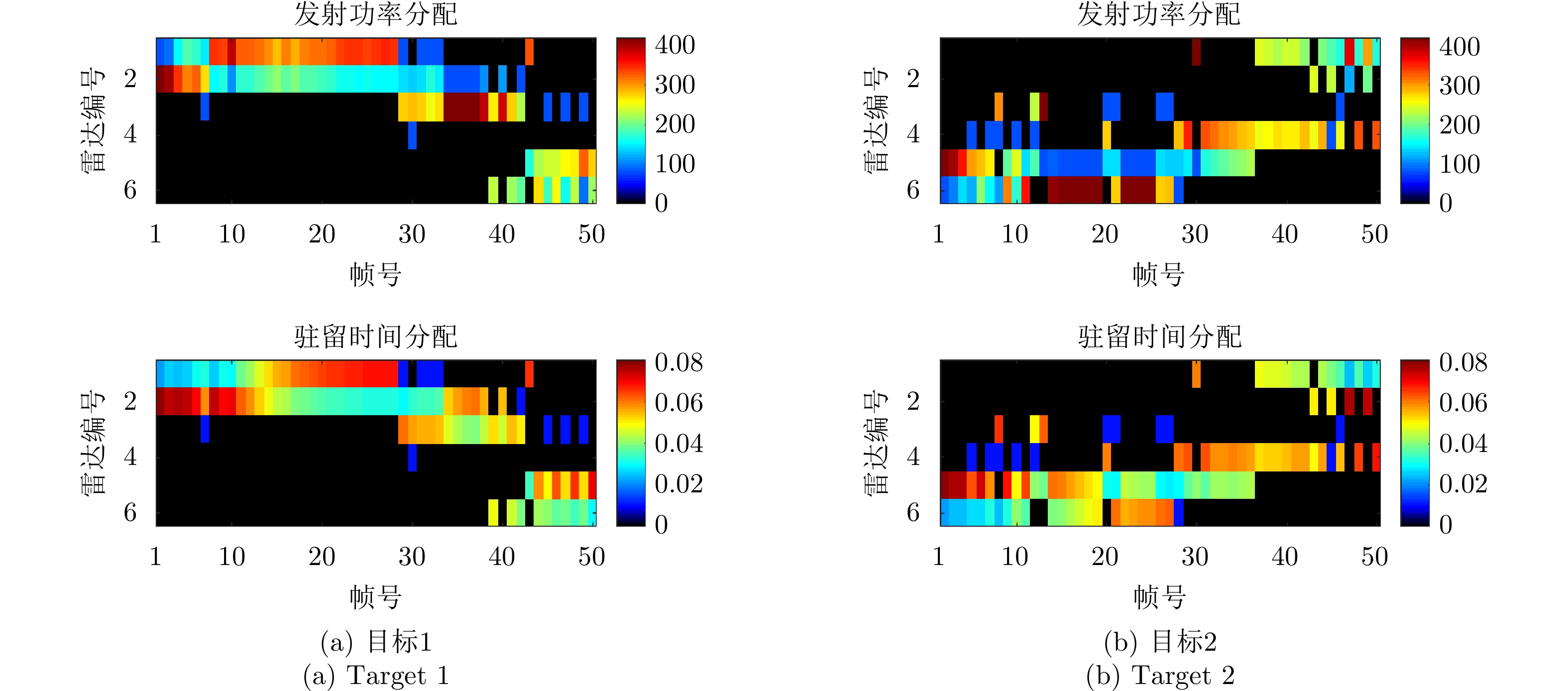
该文针对频谱共存环境下多目标跟踪资源分配问题,提出了组网雷达功率时间联合优化算法。首先,推导了包含雷达节点选择、发射功率和驻留时间等射频辐射参数的预测贝叶斯克拉默-拉奥下界(BCRLB),以此作为多目标跟踪精度的衡量指标;在此基础上,以最小化多目标跟踪BCRLB为优化目标,以满足给定的组网雷达射频资源和预先设定的通信基站最大可容忍干扰能量阈值为约束条件,建立了频谱共存下面向多目标跟踪的组网雷达功率时间联合优化分配模型,对雷达节点选择、发射功率和驻留时间进行自适应联合优化配置;然后,针对上述优化问题,采用两步分解法将其分解为多个子凸问题,并结合半正定规划(SDP)算法和循环最小化算法进行求解。仿真结果表明,与现有算法相比,所提算法能够在保证通信基站正常工作的条件下,有效提高组网雷达的多目标跟踪精度。 该文针对频谱共存环境下多目标跟踪资源分配问题,提出了组网雷达功率时间联合优化算法。首先,推导了包含雷达节点选择、发射功率和驻留时间等射频辐射参数的预测贝叶斯克拉默-拉奥下界(BCRLB),以此作为多目标跟踪精度的衡量指标;在此基础上,以最小化多目标跟踪BCRLB为优化目标,以满足给定的组网雷达射频资源和预先设定的通信基站最大可容忍干扰能量阈值为约束条件,建立了频谱共存下面向多目标跟踪的组网雷达功率时间联合优化分配模型,对雷达节点选择、发射功率和驻留时间进行自适应联合优化配置;然后,针对上述优化问题,采用两步分解法将其分解为多个子凸问题,并结合半正定规划(SDP)算法和循环最小化算法进行求解。仿真结果表明,与现有算法相比,所提算法能够在保证通信基站正常工作的条件下,有效提高组网雷达的多目标跟踪精度。
该文针对频谱共存环境下多目标跟踪资源分配问题,提出了组网雷达功率时间联合优化算法。首先,推导了包含雷达节点选择、发射功率和驻留时间等射频辐射参数的预测贝叶斯克拉默-拉奥下界(BCRLB),以此作为多目标跟踪精度的衡量指标;在此基础上,以最小化多目标跟踪BCRLB为优化目标,以满足给定的组网雷达射频资源和预先设定的通信基站最大可容忍干扰能量阈值为约束条件,建立了频谱共存下面向多目标跟踪的组网雷达功率时间联合优化分配模型,对雷达节点选择、发射功率和驻留时间进行自适应联合优化配置;然后,针对上述优化问题,采用两步分解法将其分解为多个子凸问题,并结合半正定规划(SDP)算法和循环最小化算法进行求解。仿真结果表明,与现有算法相比,所提算法能够在保证通信基站正常工作的条件下,有效提高组网雷达的多目标跟踪精度。 该文针对频谱共存环境下多目标跟踪资源分配问题,提出了组网雷达功率时间联合优化算法。首先,推导了包含雷达节点选择、发射功率和驻留时间等射频辐射参数的预测贝叶斯克拉默-拉奥下界(BCRLB),以此作为多目标跟踪精度的衡量指标;在此基础上,以最小化多目标跟踪BCRLB为优化目标,以满足给定的组网雷达射频资源和预先设定的通信基站最大可容忍干扰能量阈值为约束条件,建立了频谱共存下面向多目标跟踪的组网雷达功率时间联合优化分配模型,对雷达节点选择、发射功率和驻留时间进行自适应联合优化配置;然后,针对上述优化问题,采用两步分解法将其分解为多个子凸问题,并结合半正定规划(SDP)算法和循环最小化算法进行求解。仿真结果表明,与现有算法相比,所提算法能够在保证通信基站正常工作的条件下,有效提高组网雷达的多目标跟踪精度。
2023, 12(3): 602-615.
摘要:
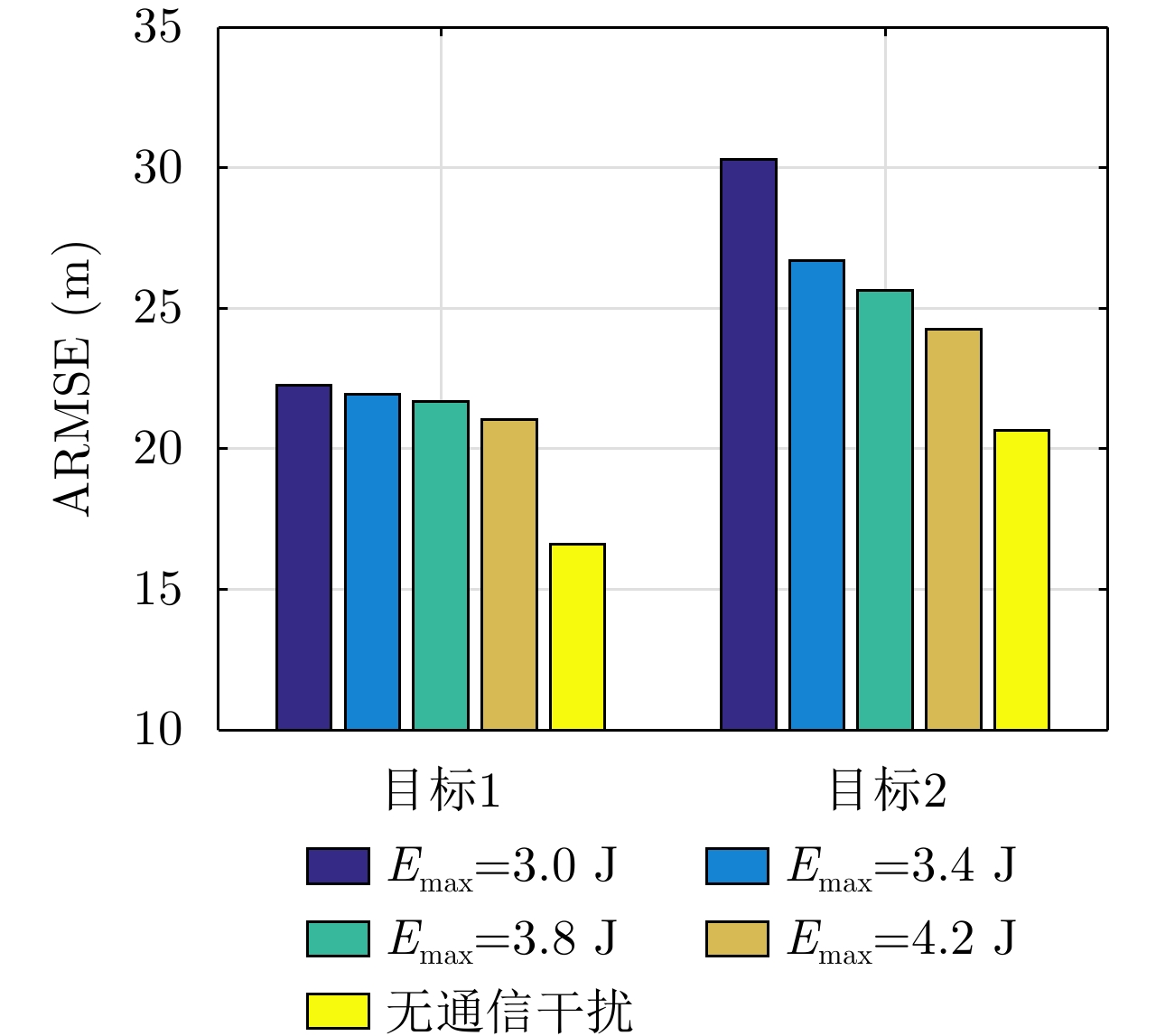
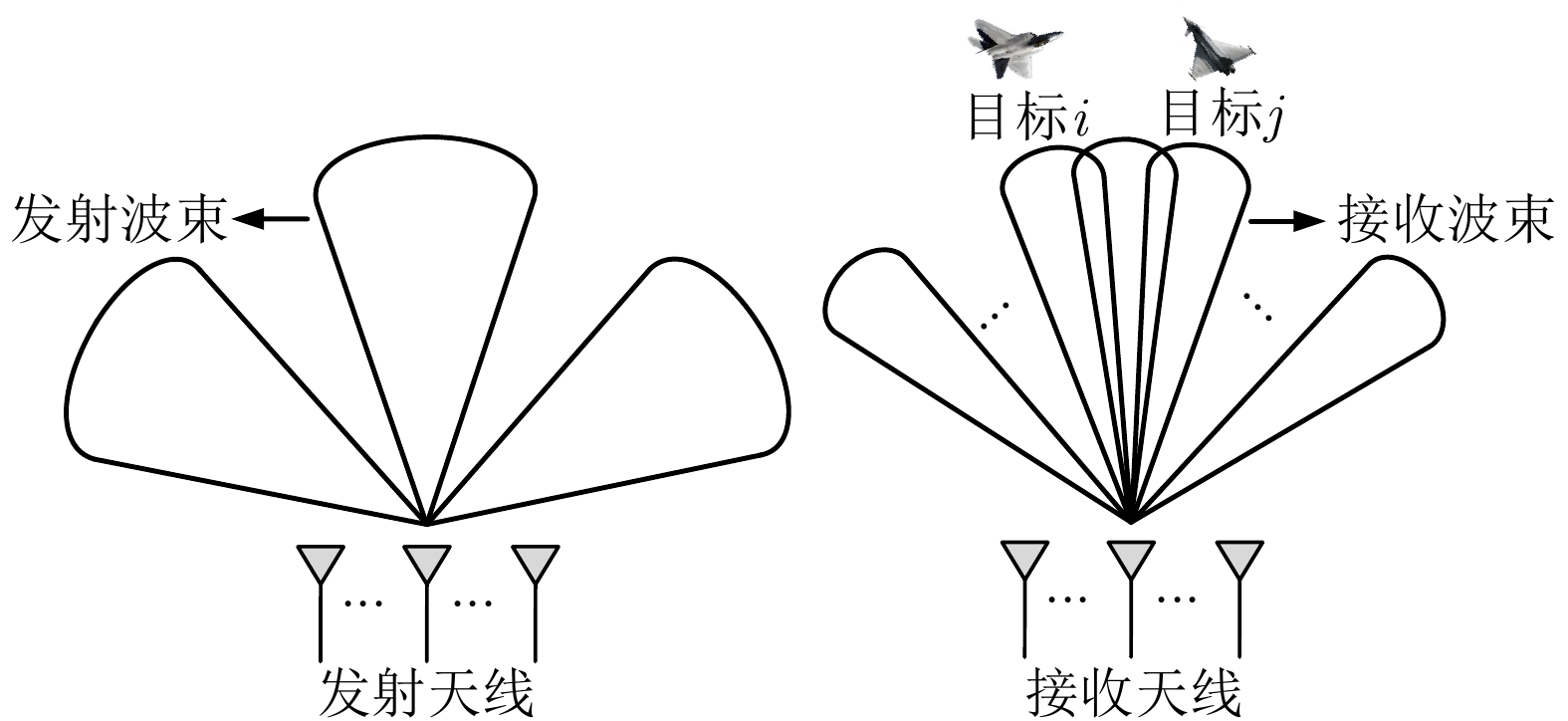
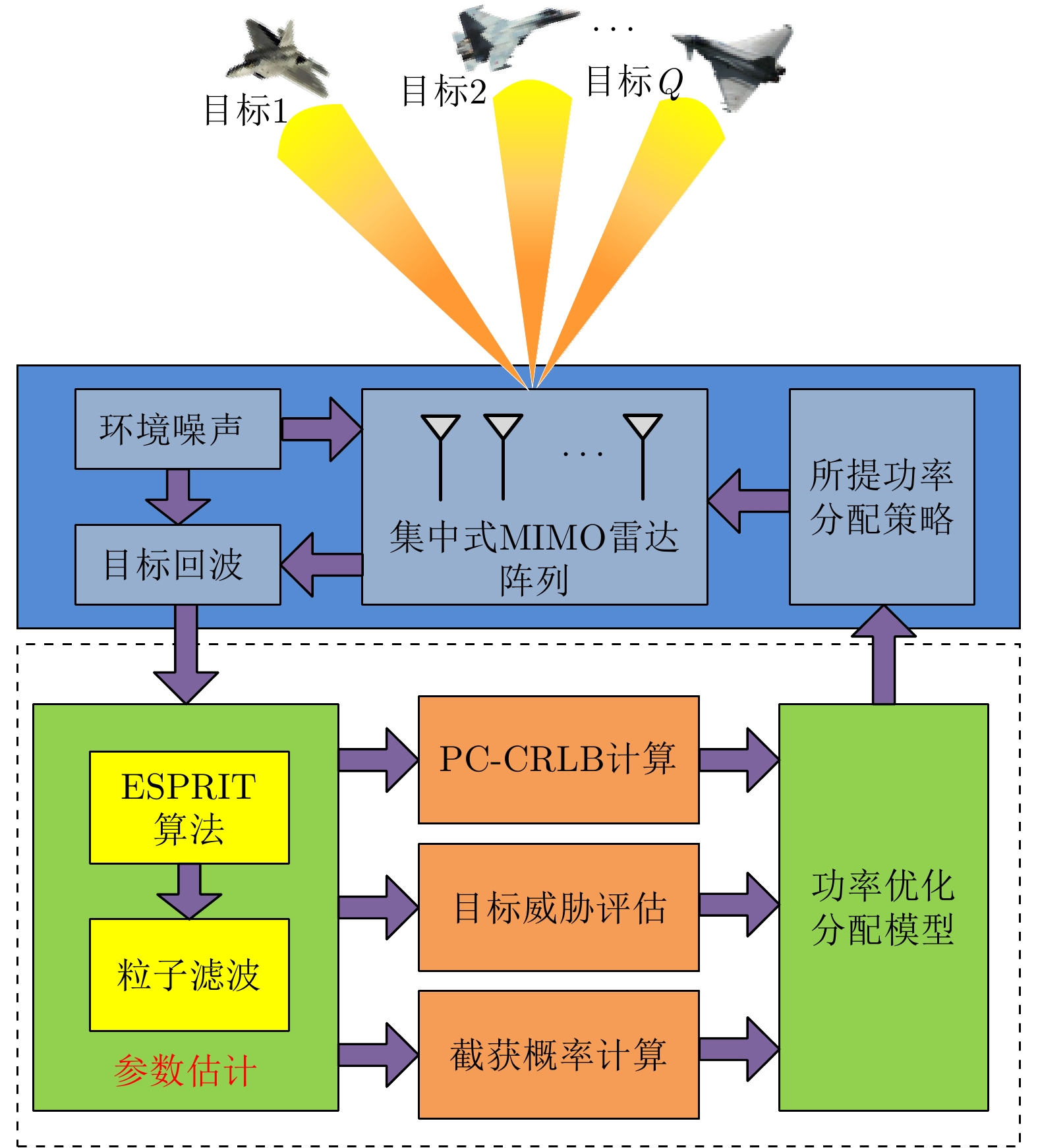
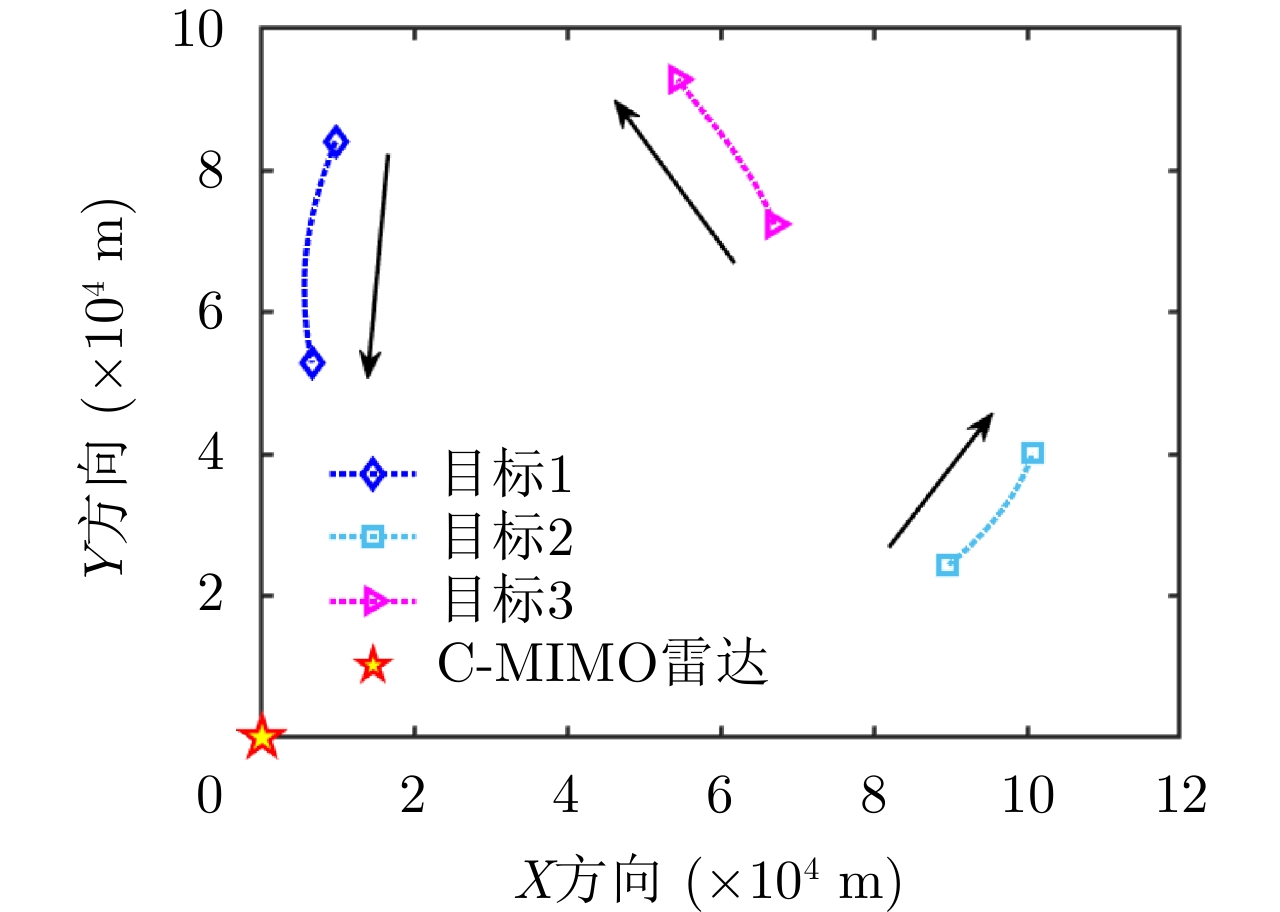
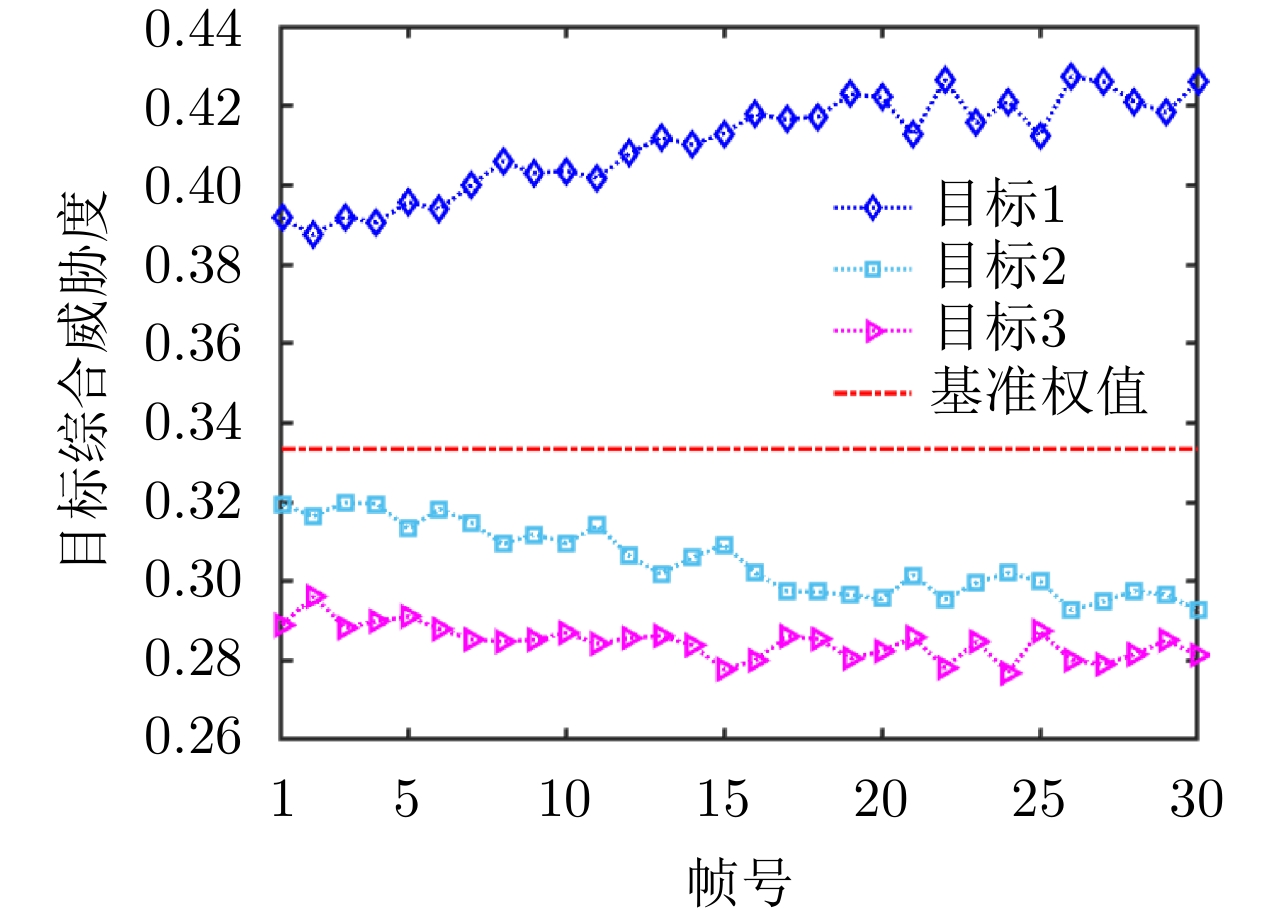
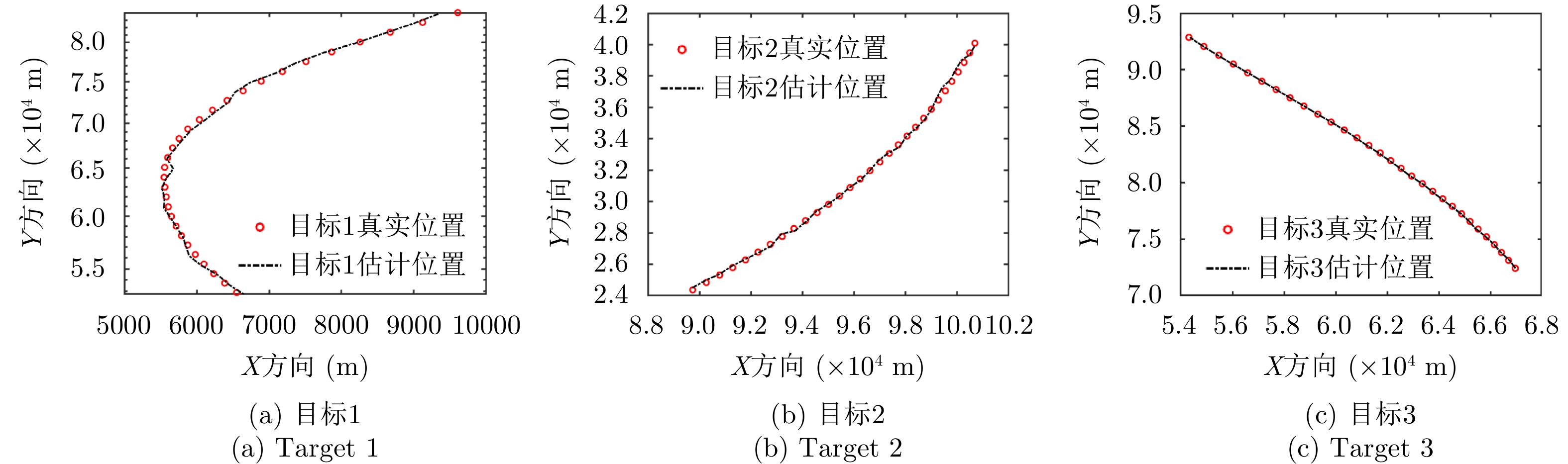
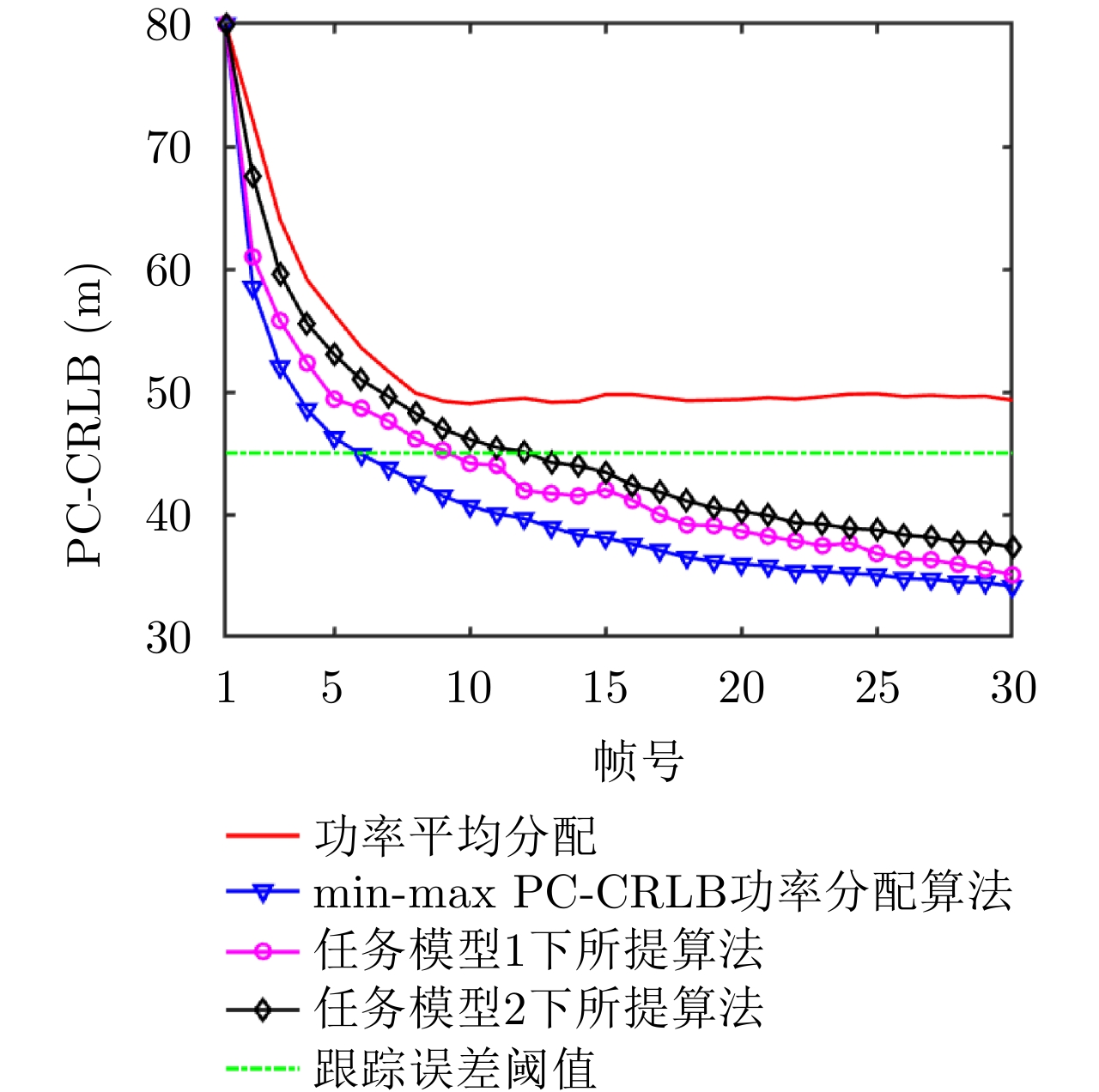
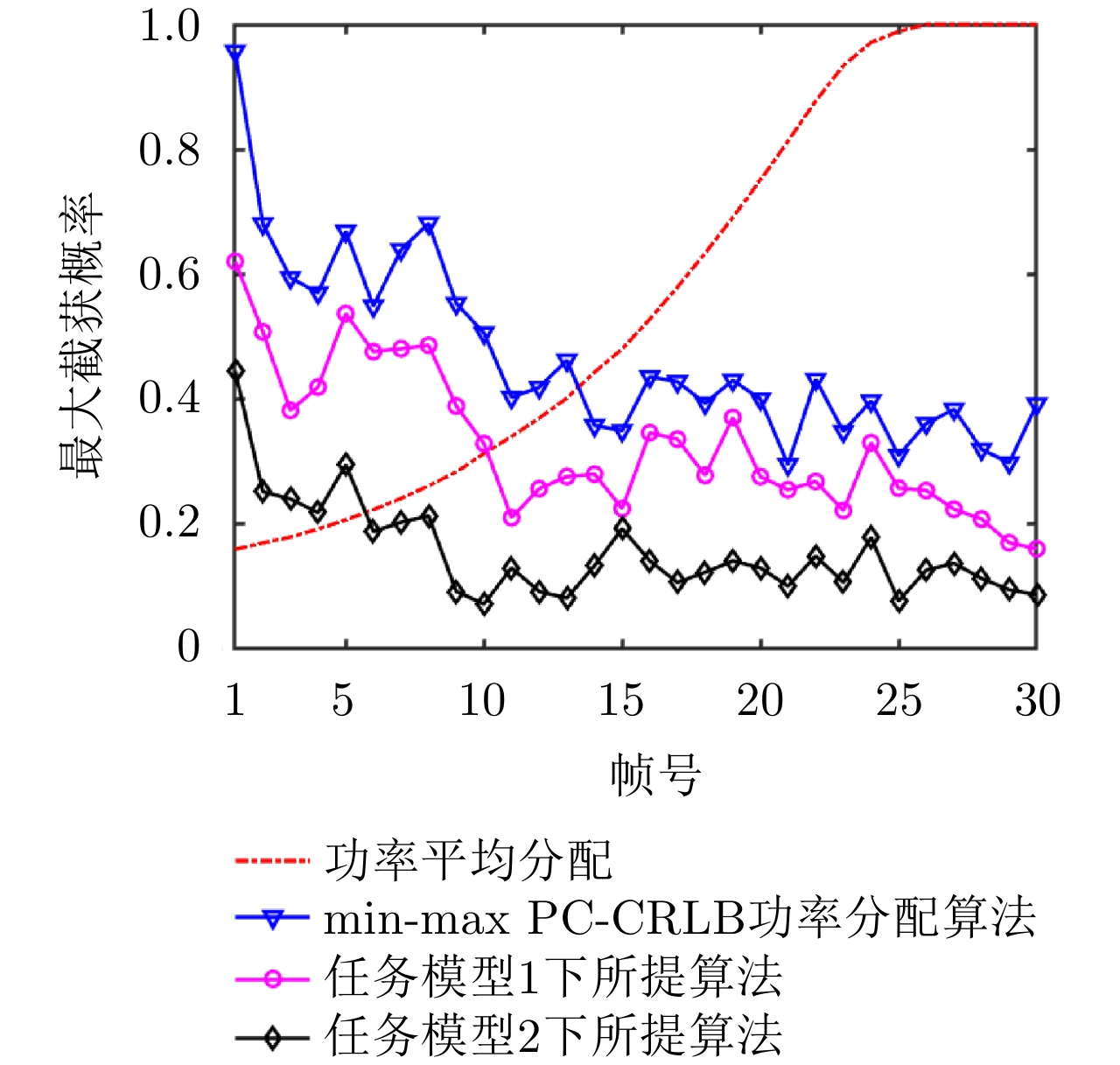
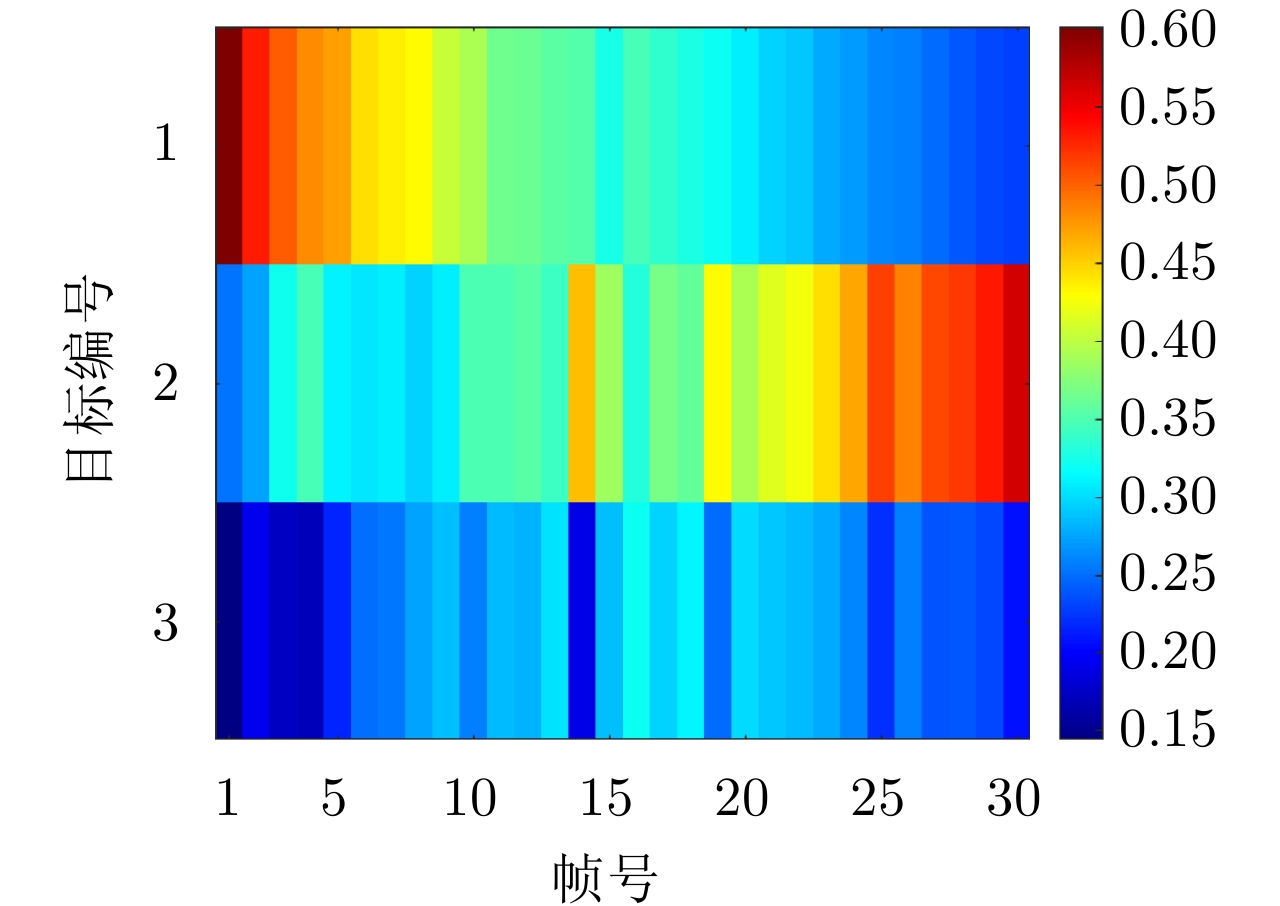
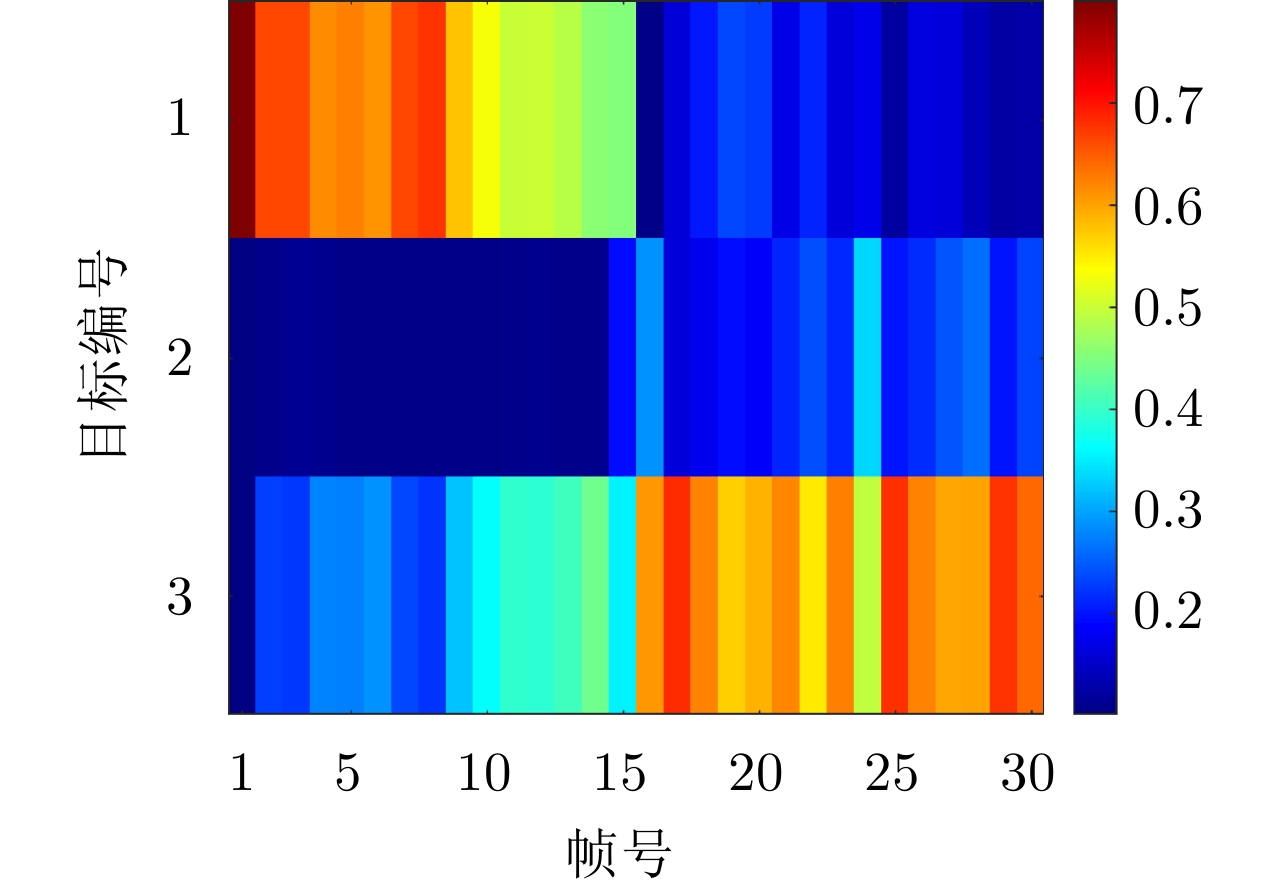
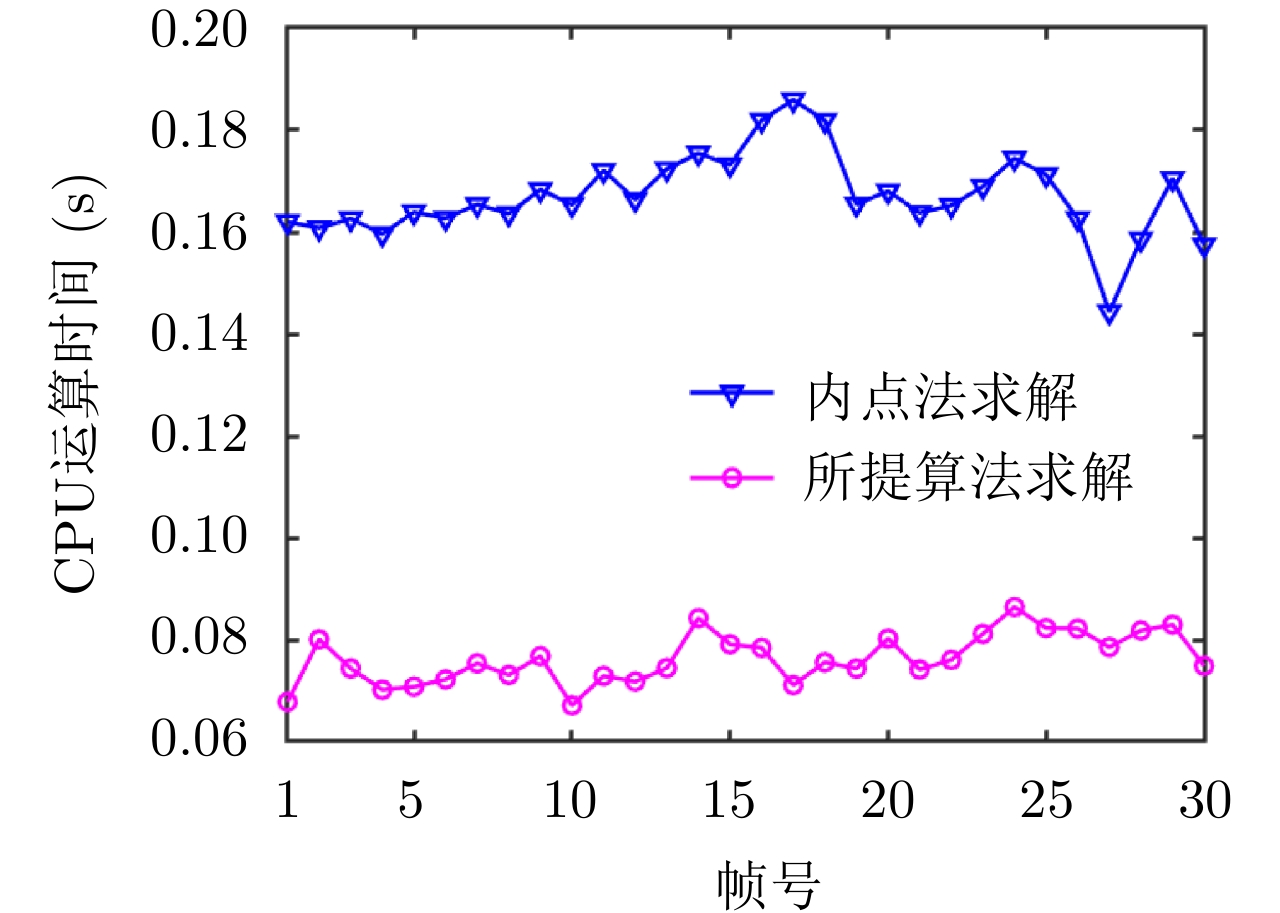
针对集中式MIMO雷达同时跟踪多批机动目标场景,该文提出一种低截获背景下的快速功率分配算法。首先,将目标机动过程建模为自适应当前统计(ACS)模型,并采用粒子滤波对各目标状态进行估计。其次,对条件克拉默-拉奥下界(PC-CRLB)进行推导,并基于目标运动特性和电磁特性构建目标综合威胁度评估模型。随后,将目标跟踪误差评估指数和雷达未被截获概率的加权和作为优化目标,建立了关于发射功率的优化模型,利用目标函数单调递减性质,提出了一种基于序列松弛的求解算法进行模型求解。最后,通过仿真验证所提算法的有效性和时效性。结果表明,所提算法能够有效提高目标跟踪精度和雷达系统低截获性能,相比采用内点法求解运算速度提高近50%。 针对集中式MIMO雷达同时跟踪多批机动目标场景,该文提出一种低截获背景下的快速功率分配算法。首先,将目标机动过程建模为自适应当前统计(ACS)模型,并采用粒子滤波对各目标状态进行估计。其次,对条件克拉默-拉奥下界(PC-CRLB)进行推导,并基于目标运动特性和电磁特性构建目标综合威胁度评估模型。随后,将目标跟踪误差评估指数和雷达未被截获概率的加权和作为优化目标,建立了关于发射功率的优化模型,利用目标函数单调递减性质,提出了一种基于序列松弛的求解算法进行模型求解。最后,通过仿真验证所提算法的有效性和时效性。结果表明,所提算法能够有效提高目标跟踪精度和雷达系统低截获性能,相比采用内点法求解运算速度提高近50%。
针对集中式MIMO雷达同时跟踪多批机动目标场景,该文提出一种低截获背景下的快速功率分配算法。首先,将目标机动过程建模为自适应当前统计(ACS)模型,并采用粒子滤波对各目标状态进行估计。其次,对条件克拉默-拉奥下界(PC-CRLB)进行推导,并基于目标运动特性和电磁特性构建目标综合威胁度评估模型。随后,将目标跟踪误差评估指数和雷达未被截获概率的加权和作为优化目标,建立了关于发射功率的优化模型,利用目标函数单调递减性质,提出了一种基于序列松弛的求解算法进行模型求解。最后,通过仿真验证所提算法的有效性和时效性。结果表明,所提算法能够有效提高目标跟踪精度和雷达系统低截获性能,相比采用内点法求解运算速度提高近50%。 针对集中式MIMO雷达同时跟踪多批机动目标场景,该文提出一种低截获背景下的快速功率分配算法。首先,将目标机动过程建模为自适应当前统计(ACS)模型,并采用粒子滤波对各目标状态进行估计。其次,对条件克拉默-拉奥下界(PC-CRLB)进行推导,并基于目标运动特性和电磁特性构建目标综合威胁度评估模型。随后,将目标跟踪误差评估指数和雷达未被截获概率的加权和作为优化目标,建立了关于发射功率的优化模型,利用目标函数单调递减性质,提出了一种基于序列松弛的求解算法进行模型求解。最后,通过仿真验证所提算法的有效性和时效性。结果表明,所提算法能够有效提高目标跟踪精度和雷达系统低截获性能,相比采用内点法求解运算速度提高近50%。







2023, 12(3): 616-628.
摘要:
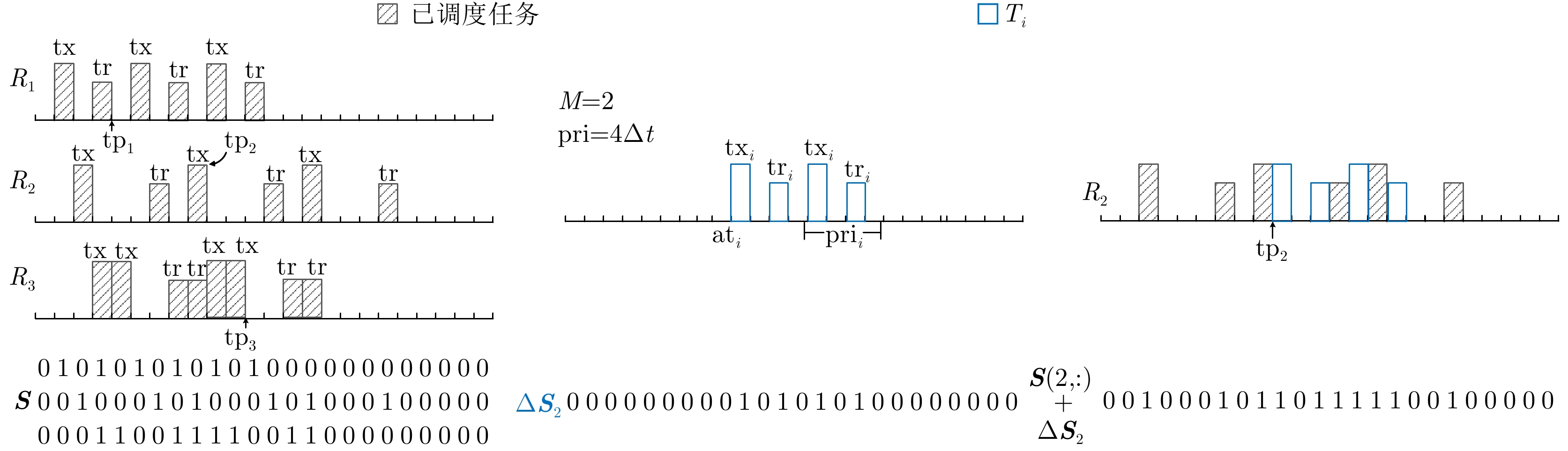
该文针对分布式雷达组网系统提出了一种基于脉冲交错的实时波束驻留调度算法。该算法引入时间指针向量,用于指示何时选择具有最高综合优先级的波束驻留任务,该任务被分配至交错时间利用程度最低的雷达节点,有效减少了调度过程中引入的时间空隙;同时,脉冲交错分析方法决定对于被分配的波束驻留任务是否可以在相应的雷达节点成功调度执行,其中,引入时隙占用矩阵和能量消耗矩阵来表征各个雷达节点的时间与能量资源使用情况,简化了交错分析过程,并实现了具有不同脉冲重复周期与个数的波束驻留任务之间的交错。此外,为了提高波束驻留调度的效率,所提算法还引入交错时间利用率门限自适应选择时间指针的滑动步长。仿真结果表明,该文所提算法能实现分布式雷达组网系统实时的波束驻留调度,并能获得较现有波束驻留调度算法更好的调度性能。 该文针对分布式雷达组网系统提出了一种基于脉冲交错的实时波束驻留调度算法。该算法引入时间指针向量,用于指示何时选择具有最高综合优先级的波束驻留任务,该任务被分配至交错时间利用程度最低的雷达节点,有效减少了调度过程中引入的时间空隙;同时,脉冲交错分析方法决定对于被分配的波束驻留任务是否可以在相应的雷达节点成功调度执行,其中,引入时隙占用矩阵和能量消耗矩阵来表征各个雷达节点的时间与能量资源使用情况,简化了交错分析过程,并实现了具有不同脉冲重复周期与个数的波束驻留任务之间的交错。此外,为了提高波束驻留调度的效率,所提算法还引入交错时间利用率门限自适应选择时间指针的滑动步长。仿真结果表明,该文所提算法能实现分布式雷达组网系统实时的波束驻留调度,并能获得较现有波束驻留调度算法更好的调度性能。
该文针对分布式雷达组网系统提出了一种基于脉冲交错的实时波束驻留调度算法。该算法引入时间指针向量,用于指示何时选择具有最高综合优先级的波束驻留任务,该任务被分配至交错时间利用程度最低的雷达节点,有效减少了调度过程中引入的时间空隙;同时,脉冲交错分析方法决定对于被分配的波束驻留任务是否可以在相应的雷达节点成功调度执行,其中,引入时隙占用矩阵和能量消耗矩阵来表征各个雷达节点的时间与能量资源使用情况,简化了交错分析过程,并实现了具有不同脉冲重复周期与个数的波束驻留任务之间的交错。此外,为了提高波束驻留调度的效率,所提算法还引入交错时间利用率门限自适应选择时间指针的滑动步长。仿真结果表明,该文所提算法能实现分布式雷达组网系统实时的波束驻留调度,并能获得较现有波束驻留调度算法更好的调度性能。 该文针对分布式雷达组网系统提出了一种基于脉冲交错的实时波束驻留调度算法。该算法引入时间指针向量,用于指示何时选择具有最高综合优先级的波束驻留任务,该任务被分配至交错时间利用程度最低的雷达节点,有效减少了调度过程中引入的时间空隙;同时,脉冲交错分析方法决定对于被分配的波束驻留任务是否可以在相应的雷达节点成功调度执行,其中,引入时隙占用矩阵和能量消耗矩阵来表征各个雷达节点的时间与能量资源使用情况,简化了交错分析过程,并实现了具有不同脉冲重复周期与个数的波束驻留任务之间的交错。此外,为了提高波束驻留调度的效率,所提算法还引入交错时间利用率门限自适应选择时间指针的滑动步长。仿真结果表明,该文所提算法能实现分布式雷达组网系统实时的波束驻留调度,并能获得较现有波束驻留调度算法更好的调度性能。


2023, 12(3): 629-641.
摘要:
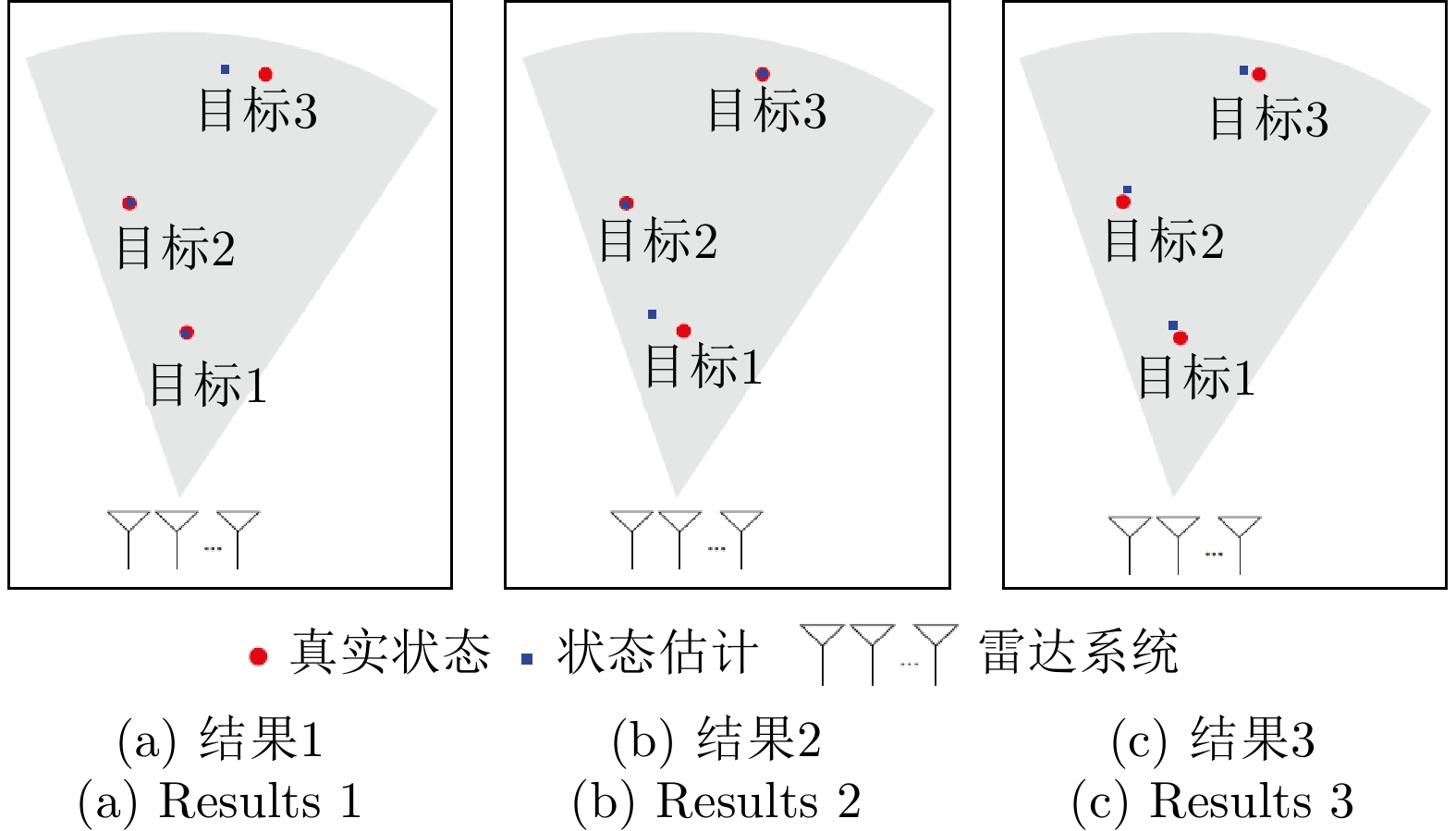
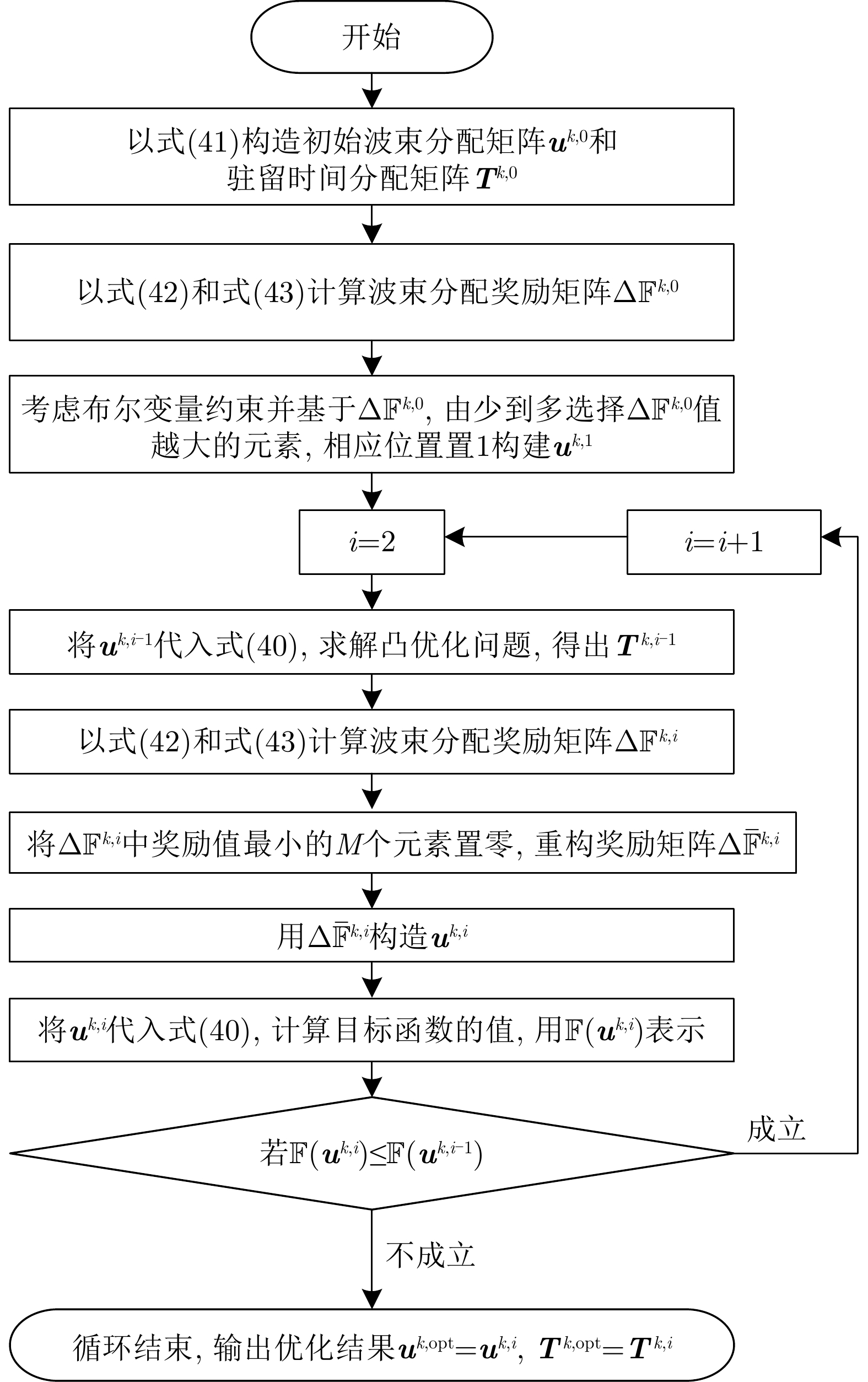
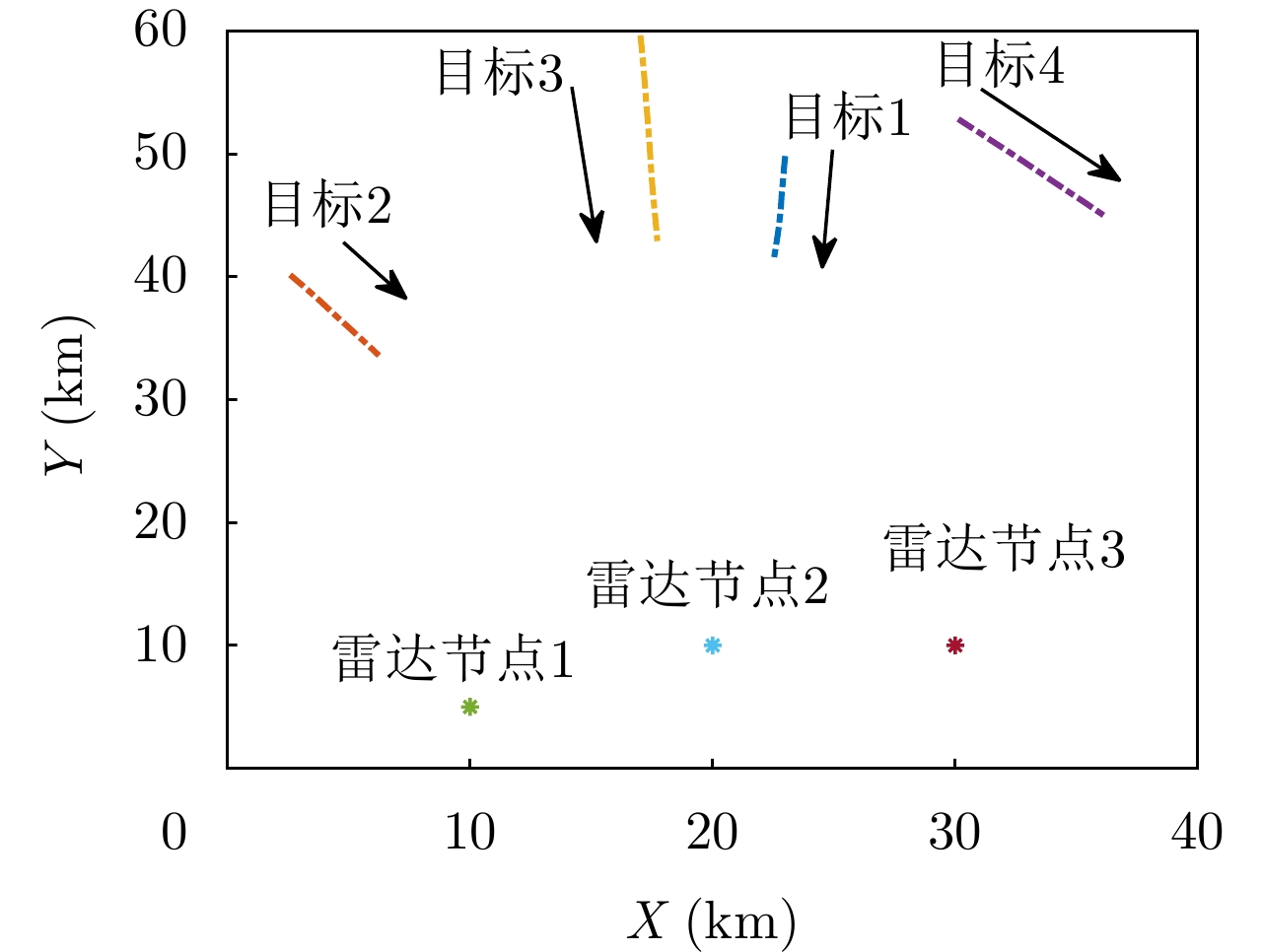
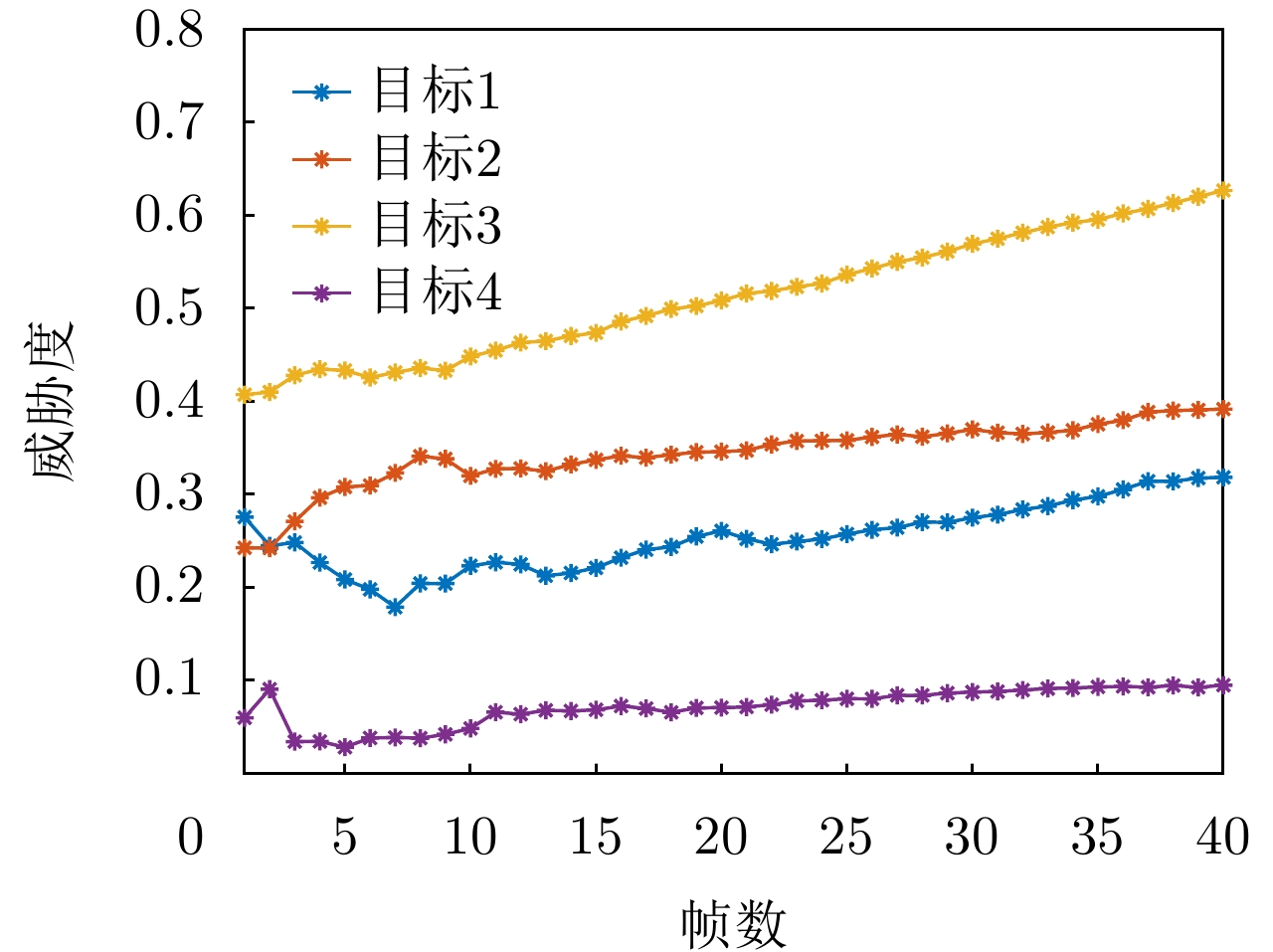
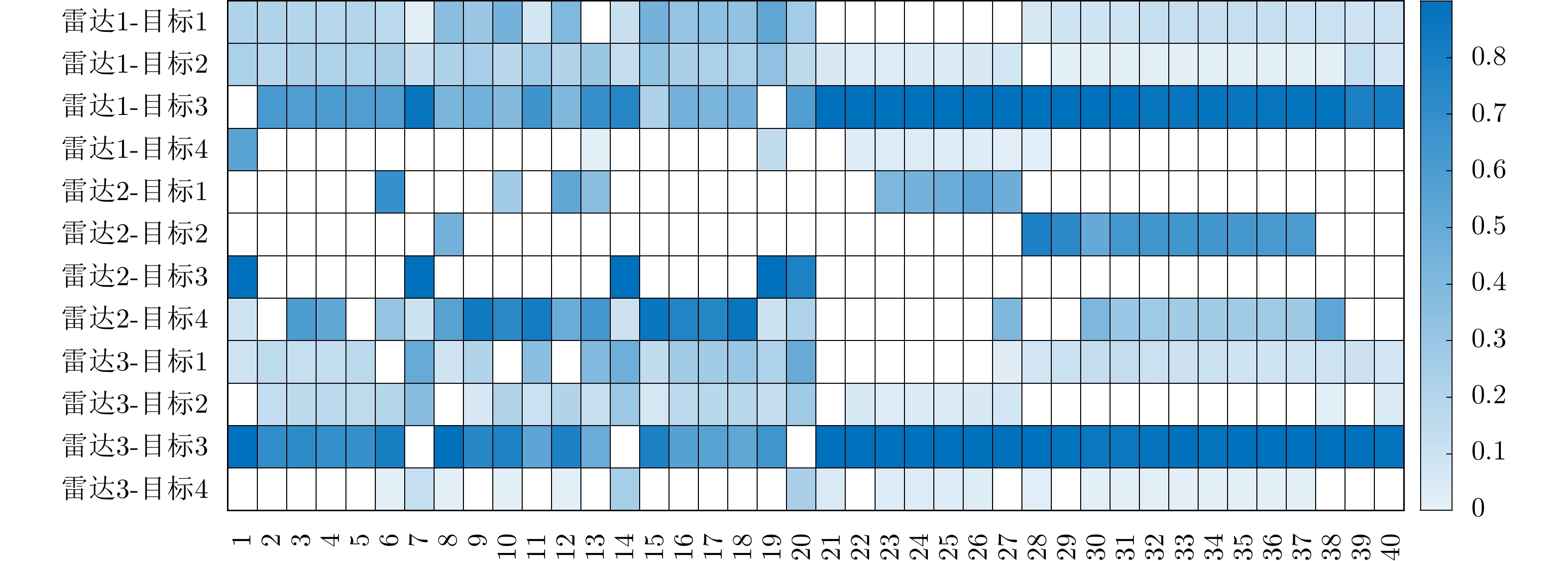
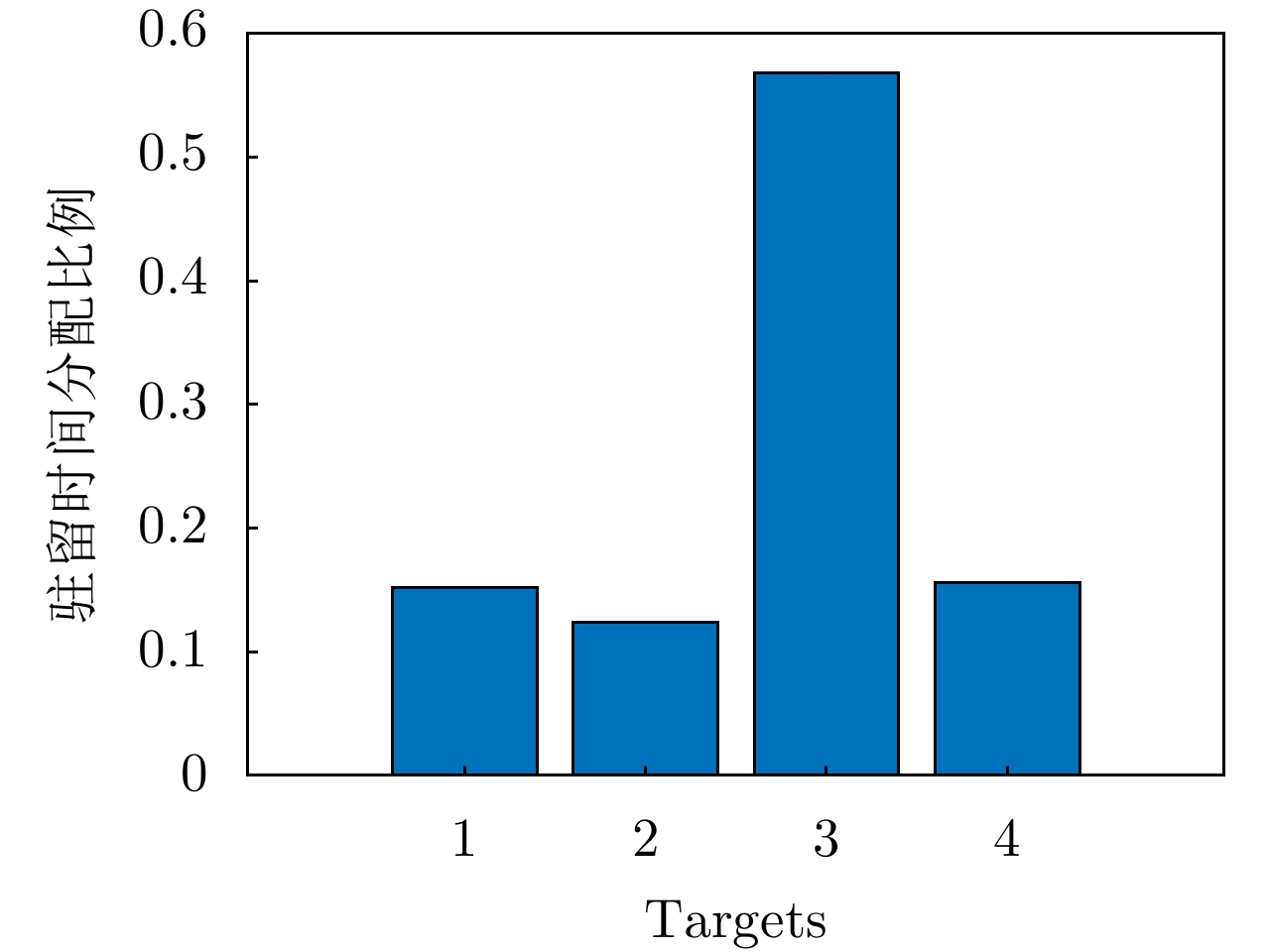
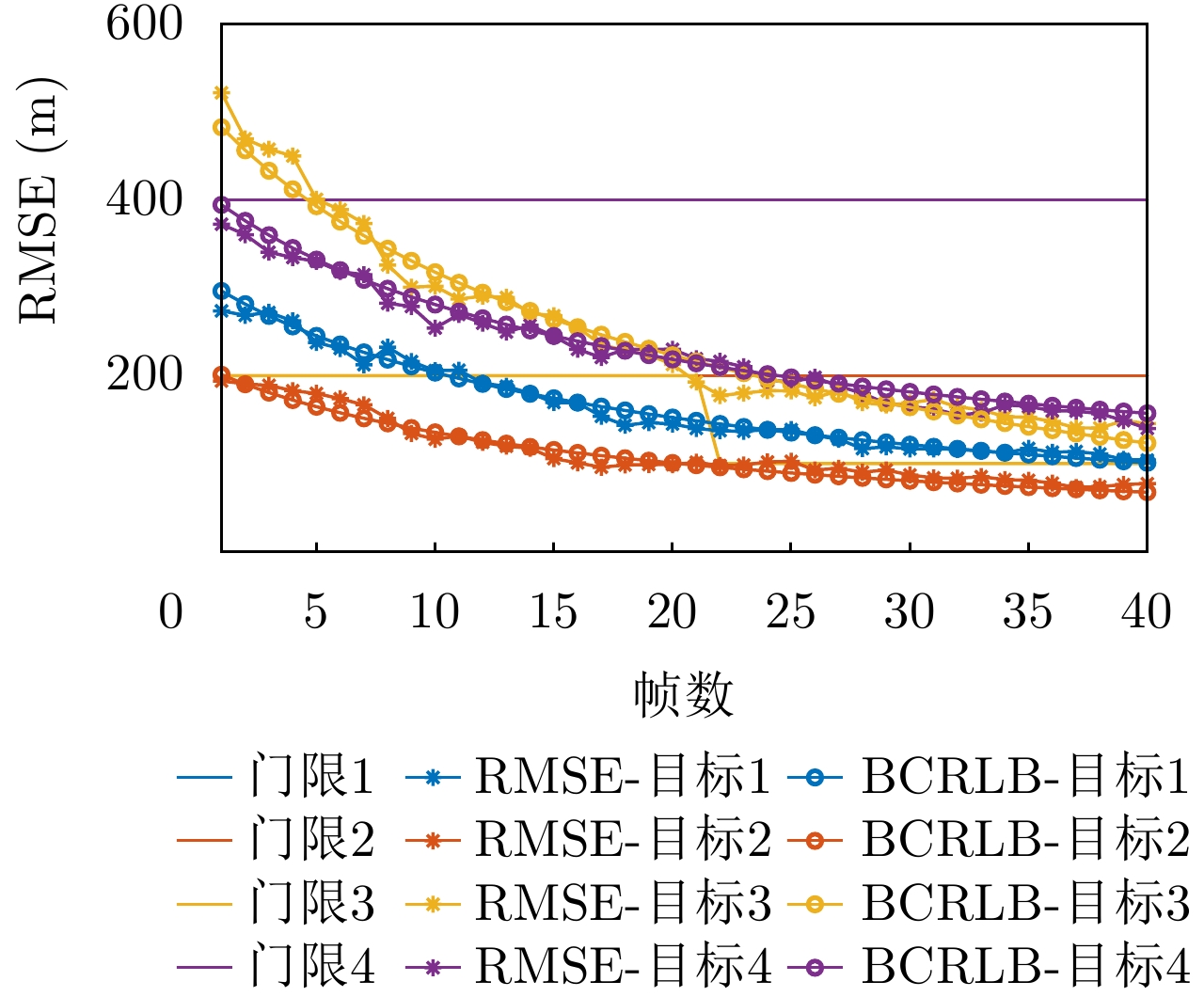
针对分布式组网相控阵雷达多目标跟踪(MTT)场景,该文提出一种目标动态威胁度驱动的波束分配与驻留时间联合优化算法。首先,在采用分布式组网架构的基础上,推导包含波束和驻留时间分配的贝叶斯克拉美罗界(BCRLB)。其次,基于目标实时运动状态构建综合威胁度评估尺度,按照威胁度为不同目标设计基于跟踪精度参考门限和贡献度的效用函数,以此衡量资源在多目标间的优先分配关系。随后,将该效用函数结合组网相控阵雷达系统资源,建立了目标动态威胁度驱动的波束分配与驻留时间联合优化模型。最后,采用一种基于奖励的迭代下降搜索算法进行求解。仿真结果表明,相较于平均资源分配方法,所提算法具备对若干差异性目标的跟踪精度需求感知能力,能够在基于多目标威胁度评估的基础上,有针对性地分配跟踪资源,从而有效提高组网相控阵雷达面对不同威胁度目标时的综合跟踪精度。 针对分布式组网相控阵雷达多目标跟踪(MTT)场景,该文提出一种目标动态威胁度驱动的波束分配与驻留时间联合优化算法。首先,在采用分布式组网架构的基础上,推导包含波束和驻留时间分配的贝叶斯克拉美罗界(BCRLB)。其次,基于目标实时运动状态构建综合威胁度评估尺度,按照威胁度为不同目标设计基于跟踪精度参考门限和贡献度的效用函数,以此衡量资源在多目标间的优先分配关系。随后,将该效用函数结合组网相控阵雷达系统资源,建立了目标动态威胁度驱动的波束分配与驻留时间联合优化模型。最后,采用一种基于奖励的迭代下降搜索算法进行求解。仿真结果表明,相较于平均资源分配方法,所提算法具备对若干差异性目标的跟踪精度需求感知能力,能够在基于多目标威胁度评估的基础上,有针对性地分配跟踪资源,从而有效提高组网相控阵雷达面对不同威胁度目标时的综合跟踪精度。
针对分布式组网相控阵雷达多目标跟踪(MTT)场景,该文提出一种目标动态威胁度驱动的波束分配与驻留时间联合优化算法。首先,在采用分布式组网架构的基础上,推导包含波束和驻留时间分配的贝叶斯克拉美罗界(BCRLB)。其次,基于目标实时运动状态构建综合威胁度评估尺度,按照威胁度为不同目标设计基于跟踪精度参考门限和贡献度的效用函数,以此衡量资源在多目标间的优先分配关系。随后,将该效用函数结合组网相控阵雷达系统资源,建立了目标动态威胁度驱动的波束分配与驻留时间联合优化模型。最后,采用一种基于奖励的迭代下降搜索算法进行求解。仿真结果表明,相较于平均资源分配方法,所提算法具备对若干差异性目标的跟踪精度需求感知能力,能够在基于多目标威胁度评估的基础上,有针对性地分配跟踪资源,从而有效提高组网相控阵雷达面对不同威胁度目标时的综合跟踪精度。 针对分布式组网相控阵雷达多目标跟踪(MTT)场景,该文提出一种目标动态威胁度驱动的波束分配与驻留时间联合优化算法。首先,在采用分布式组网架构的基础上,推导包含波束和驻留时间分配的贝叶斯克拉美罗界(BCRLB)。其次,基于目标实时运动状态构建综合威胁度评估尺度,按照威胁度为不同目标设计基于跟踪精度参考门限和贡献度的效用函数,以此衡量资源在多目标间的优先分配关系。随后,将该效用函数结合组网相控阵雷达系统资源,建立了目标动态威胁度驱动的波束分配与驻留时间联合优化模型。最后,采用一种基于奖励的迭代下降搜索算法进行求解。仿真结果表明,相较于平均资源分配方法,所提算法具备对若干差异性目标的跟踪精度需求感知能力,能够在基于多目标威胁度评估的基础上,有针对性地分配跟踪资源,从而有效提高组网相控阵雷达面对不同威胁度目标时的综合跟踪精度。

2023, 12(3): 642-656.
摘要:
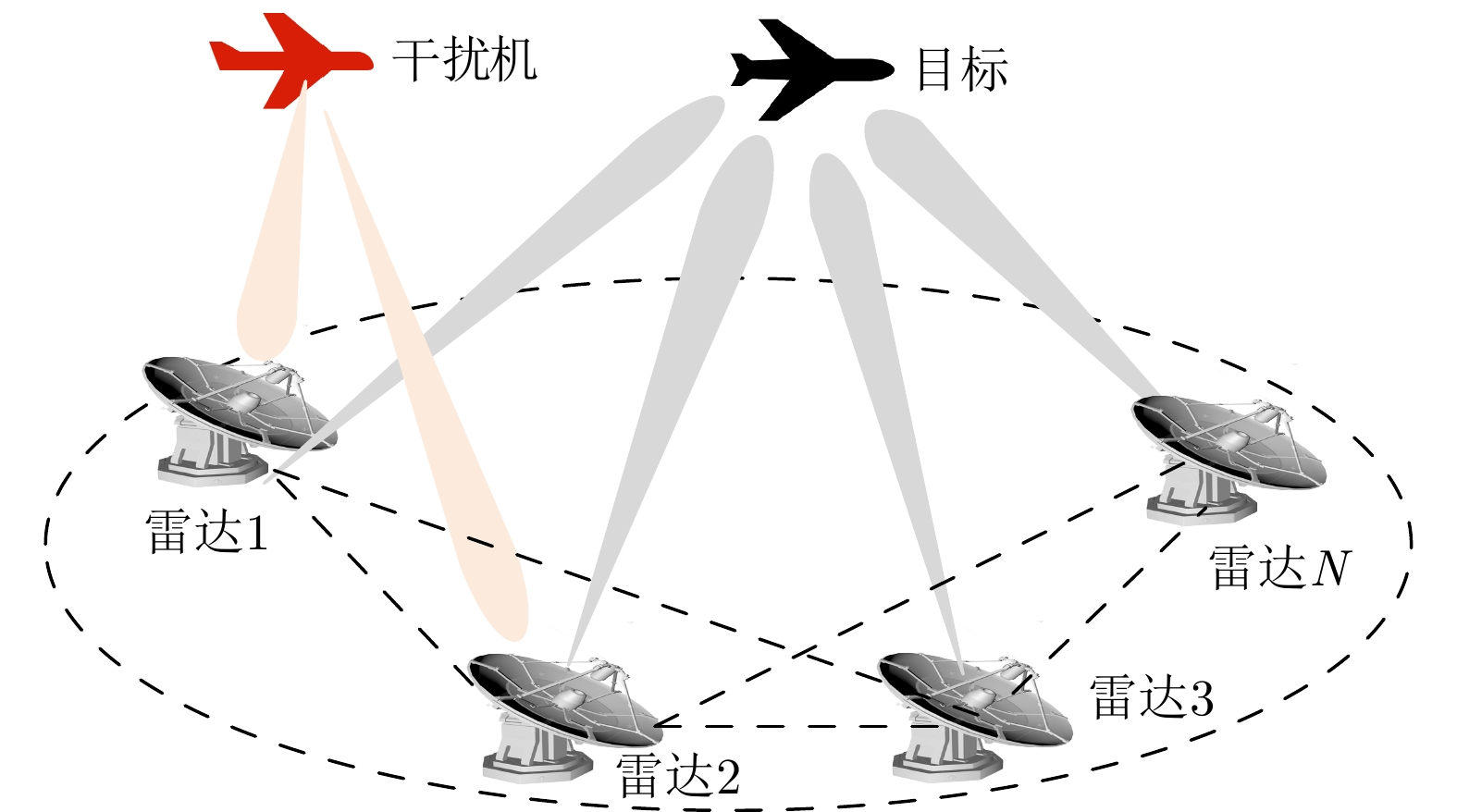
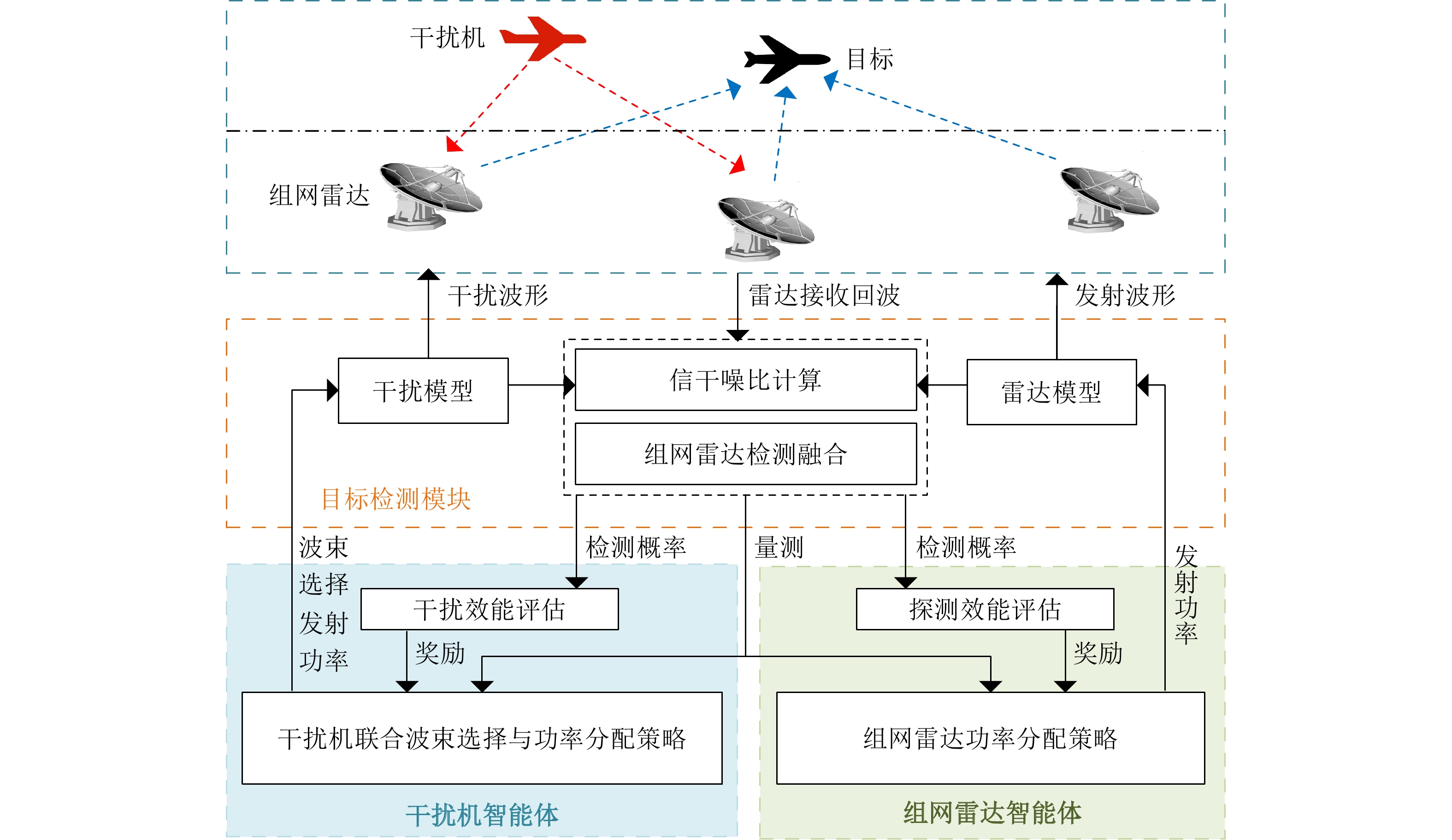
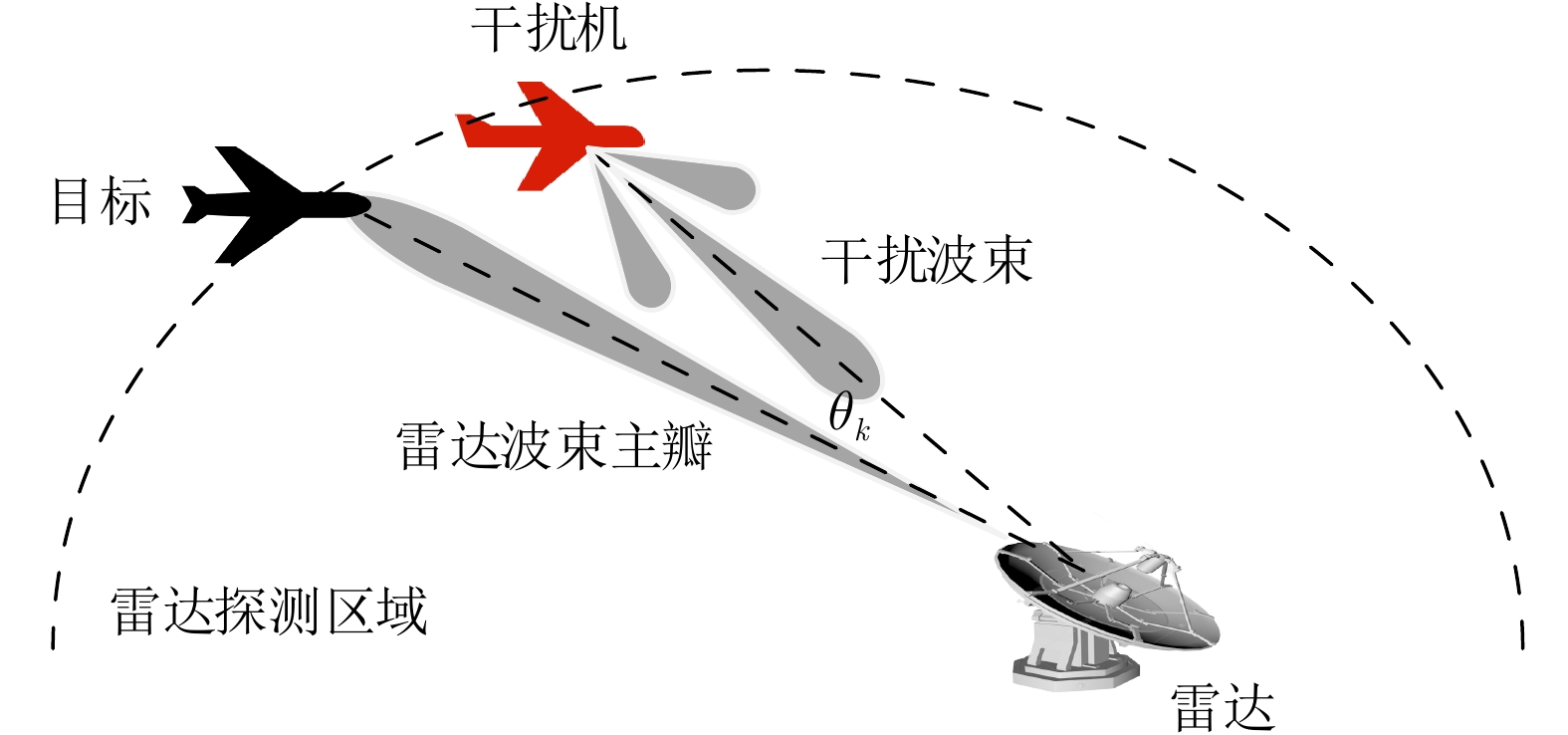
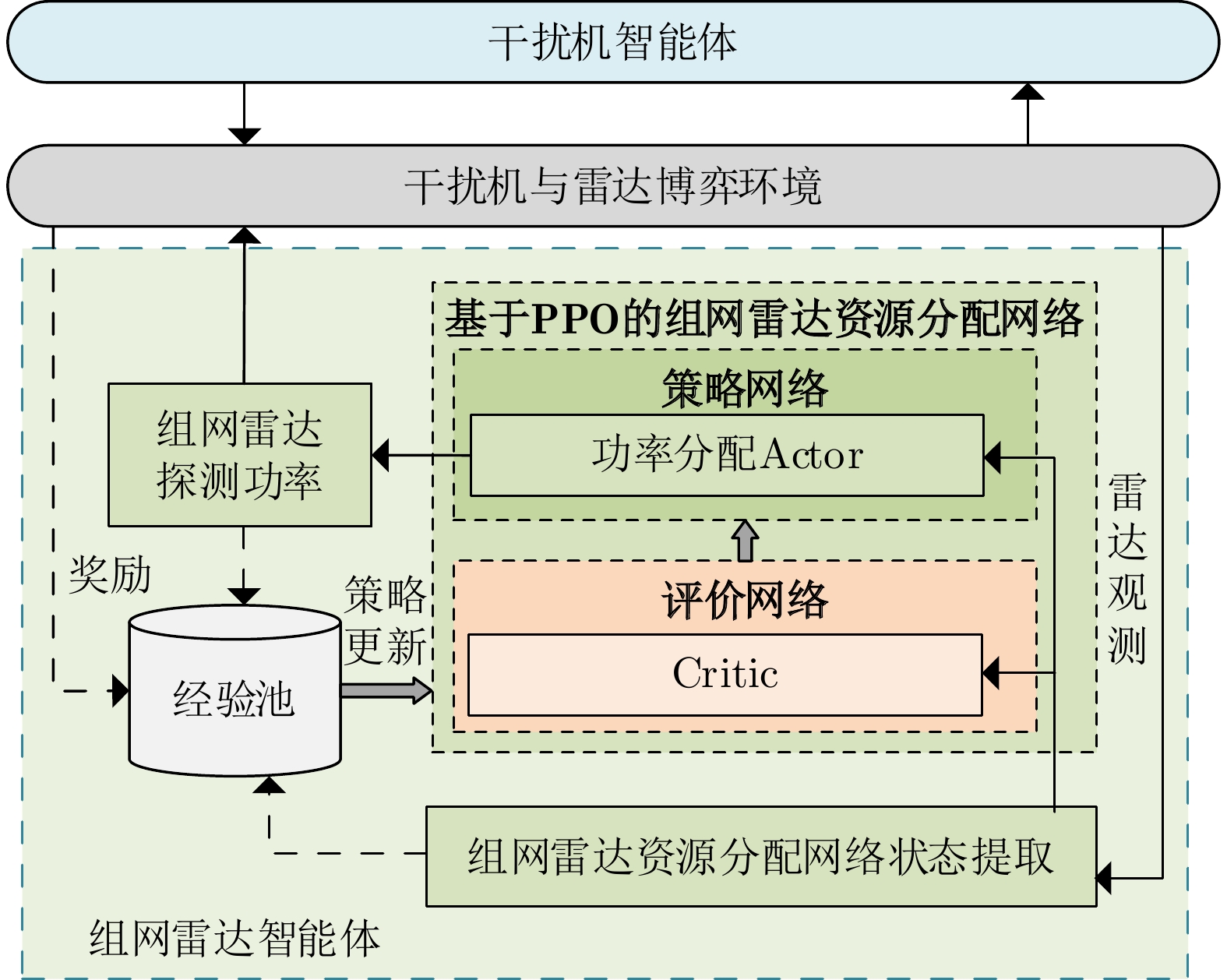
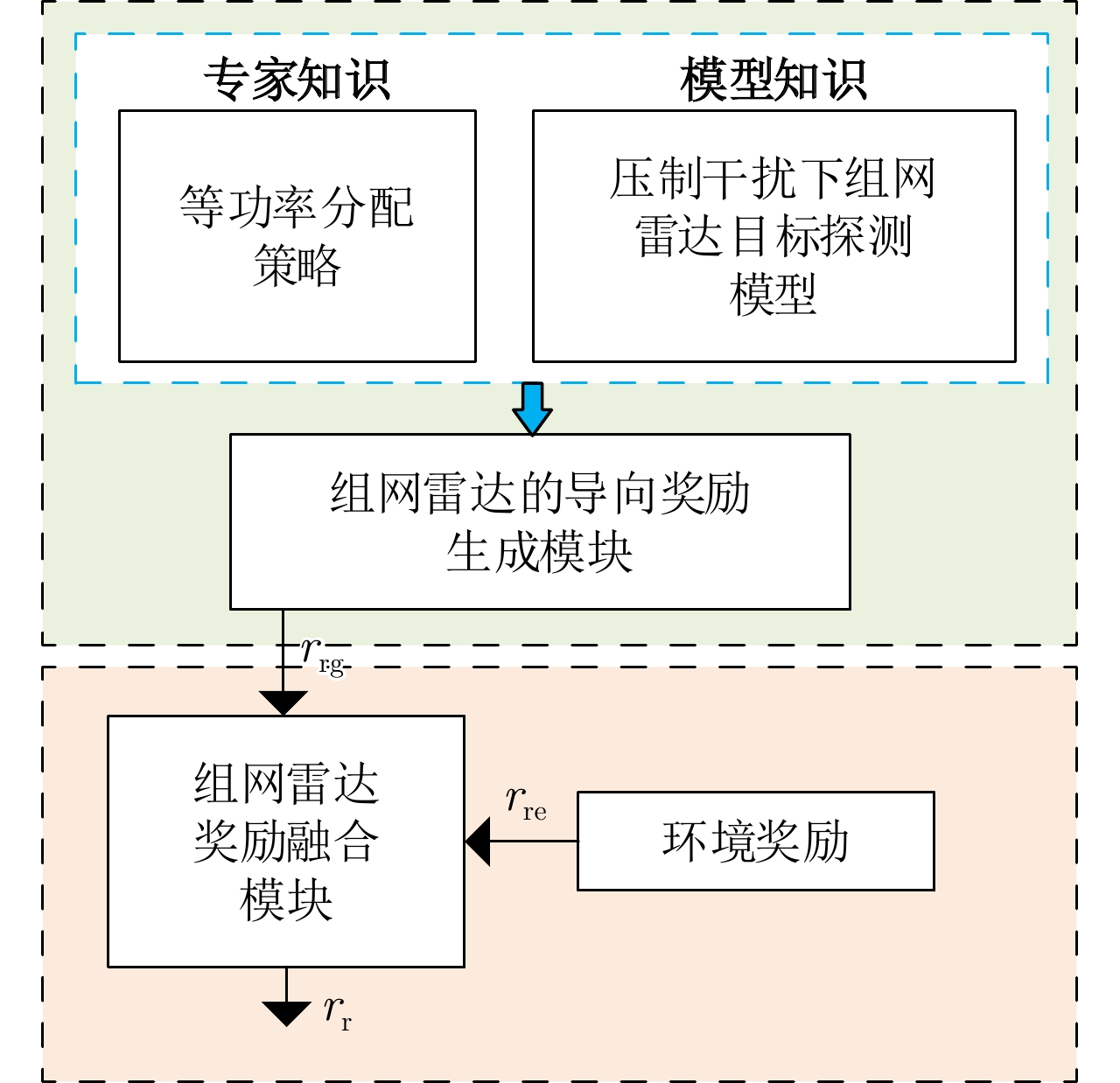
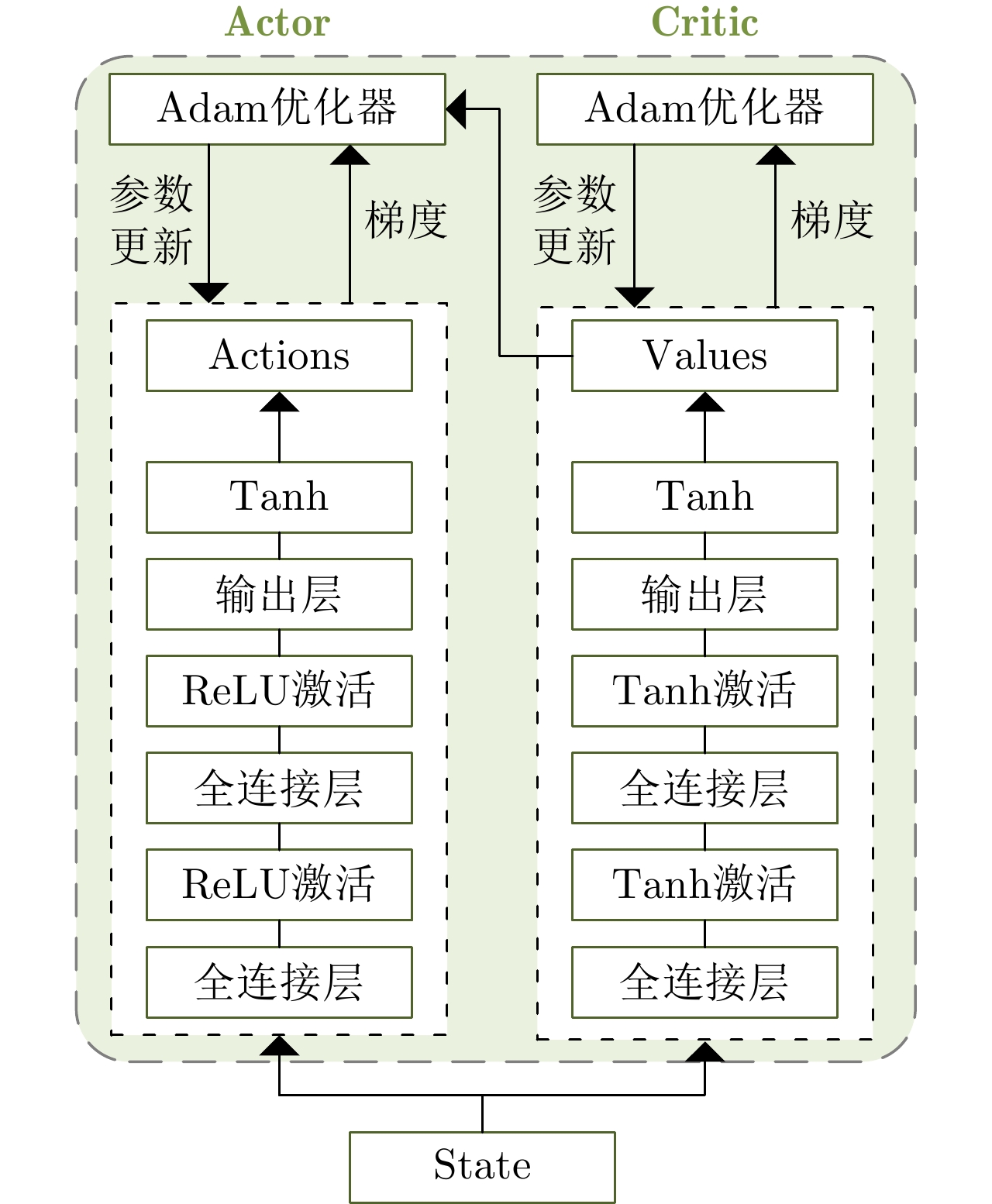
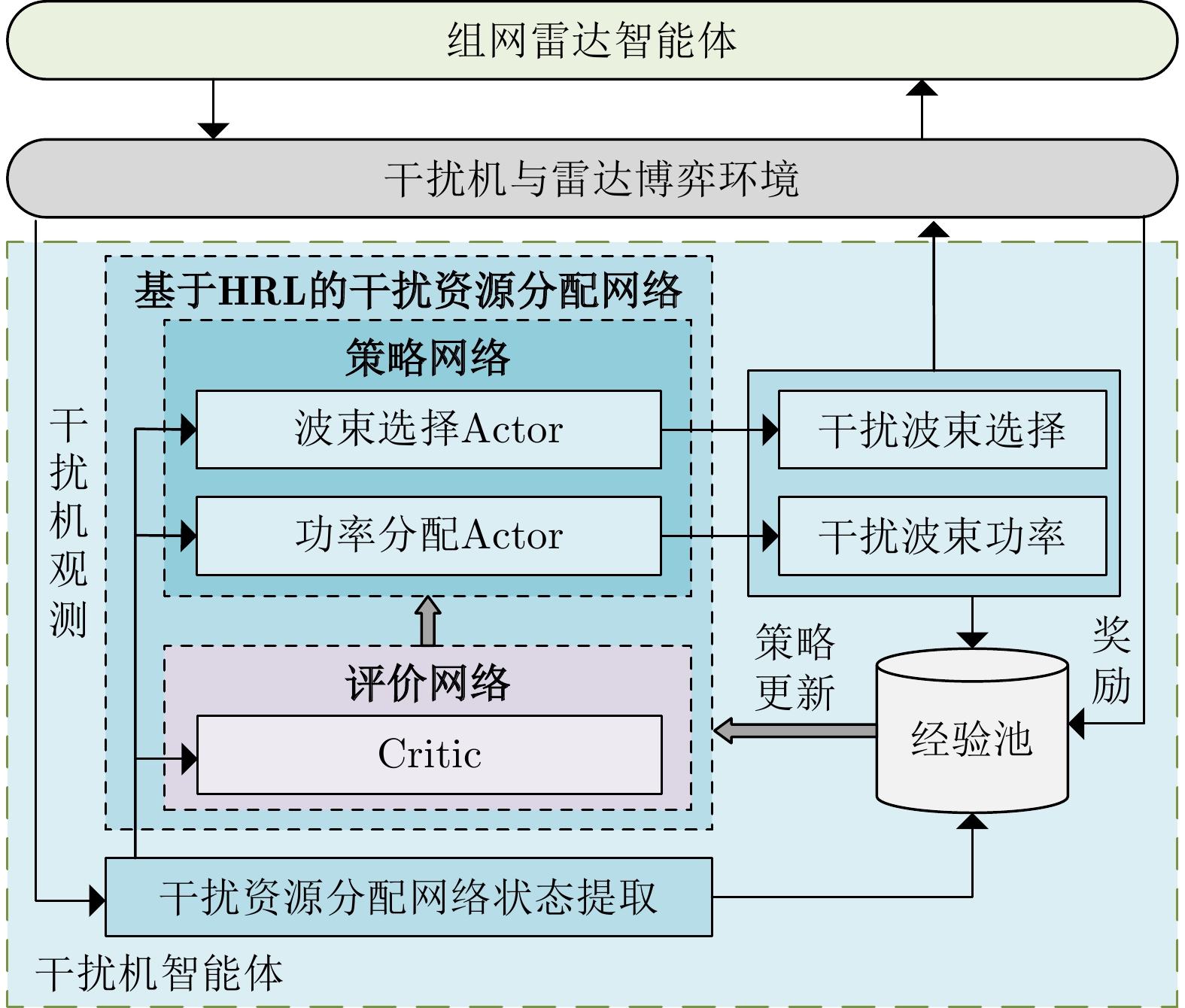
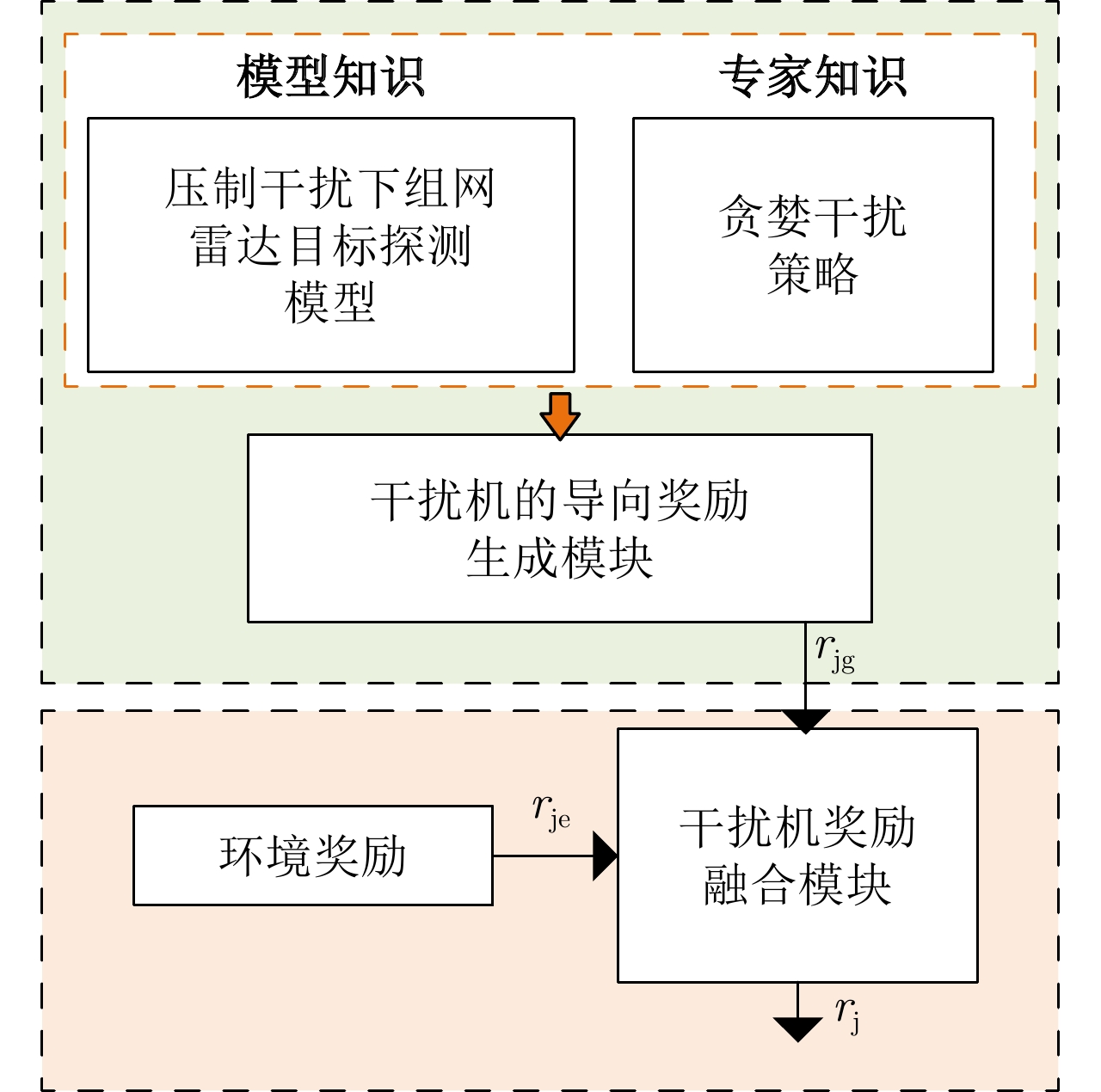
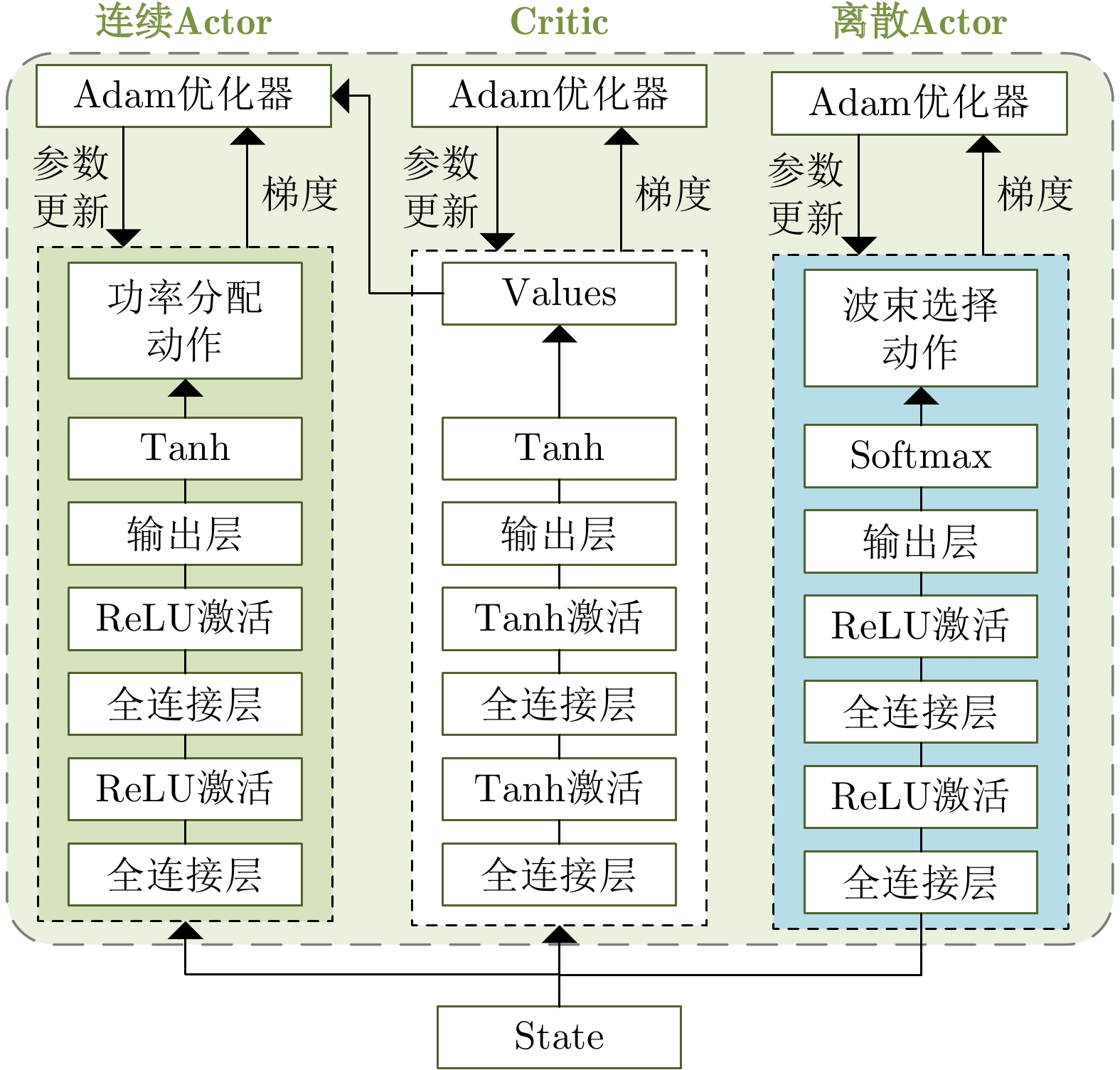
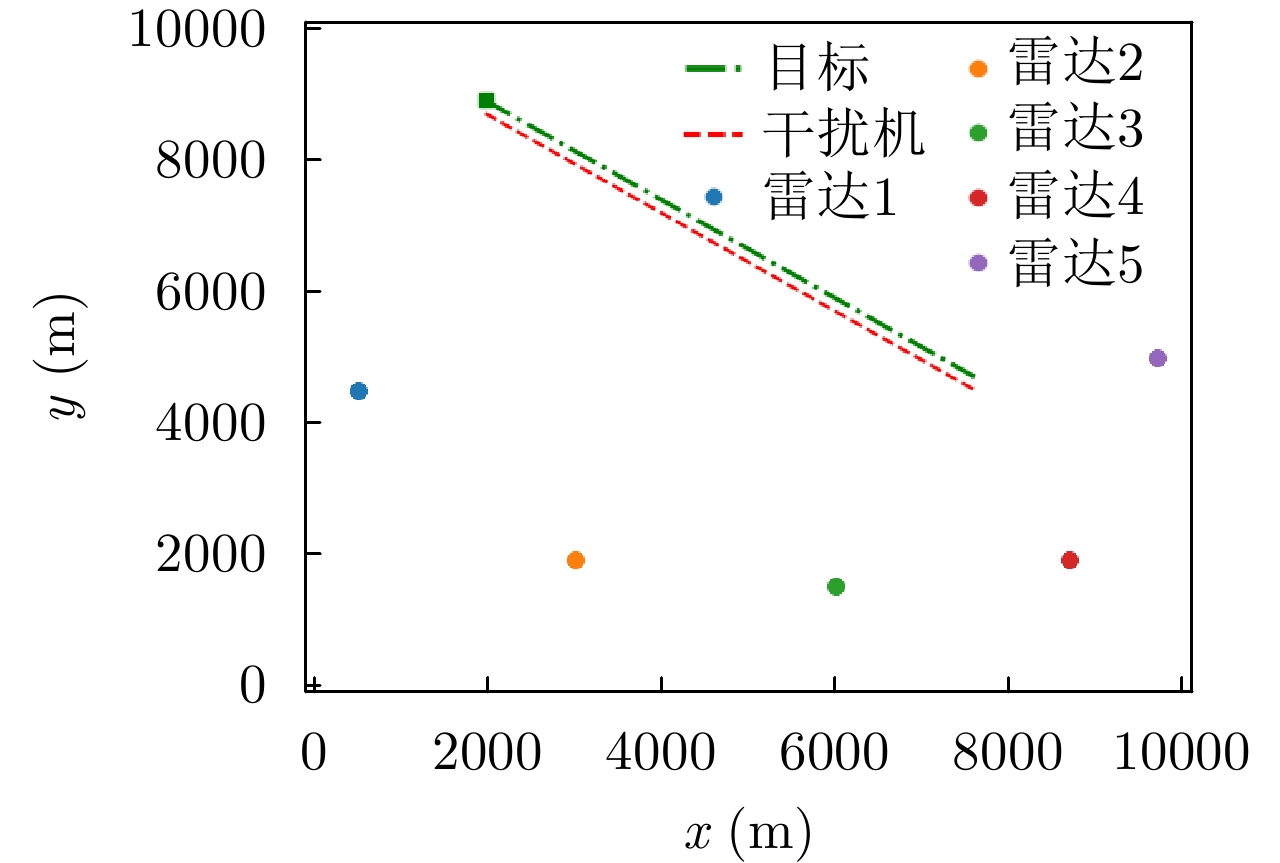
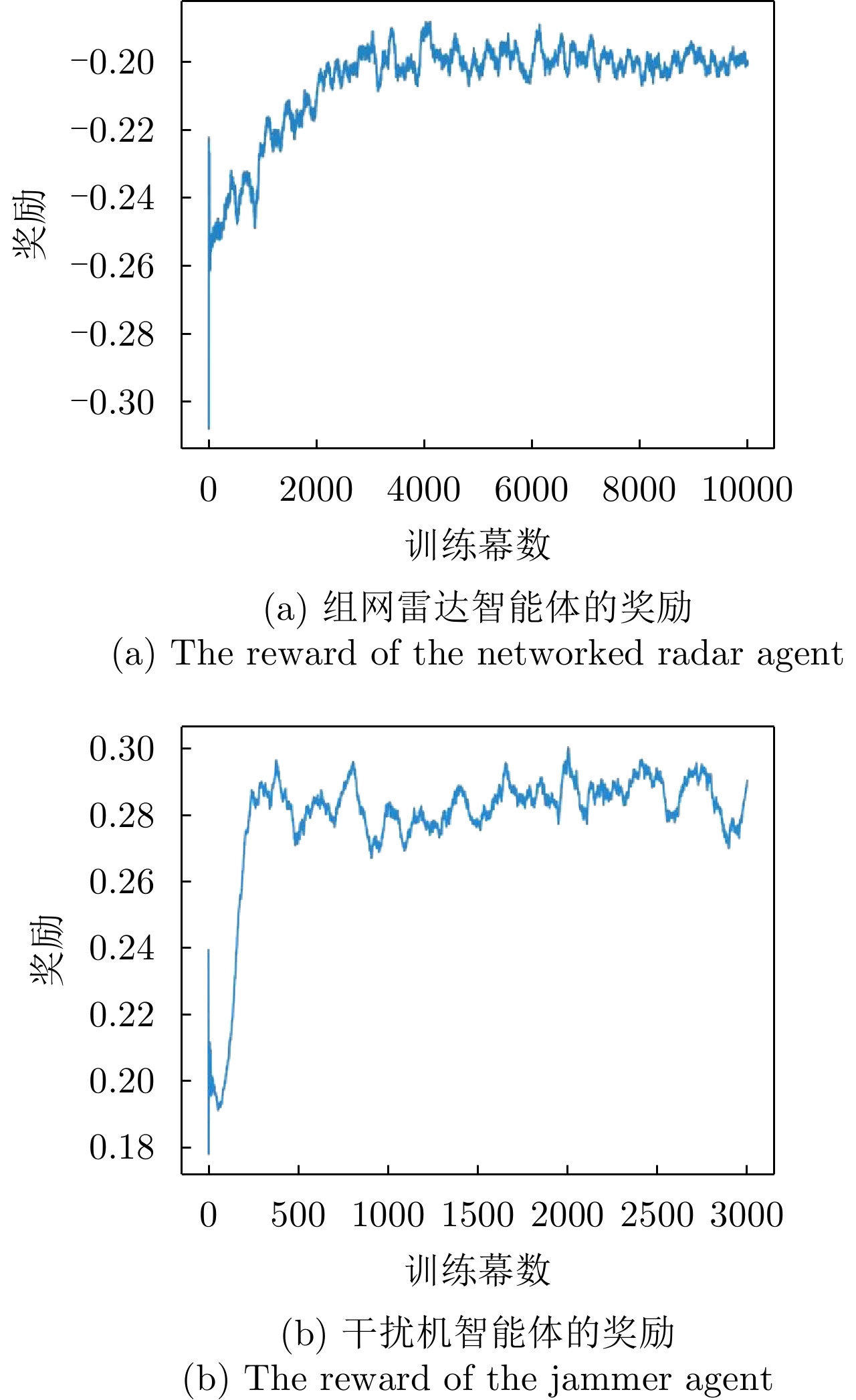
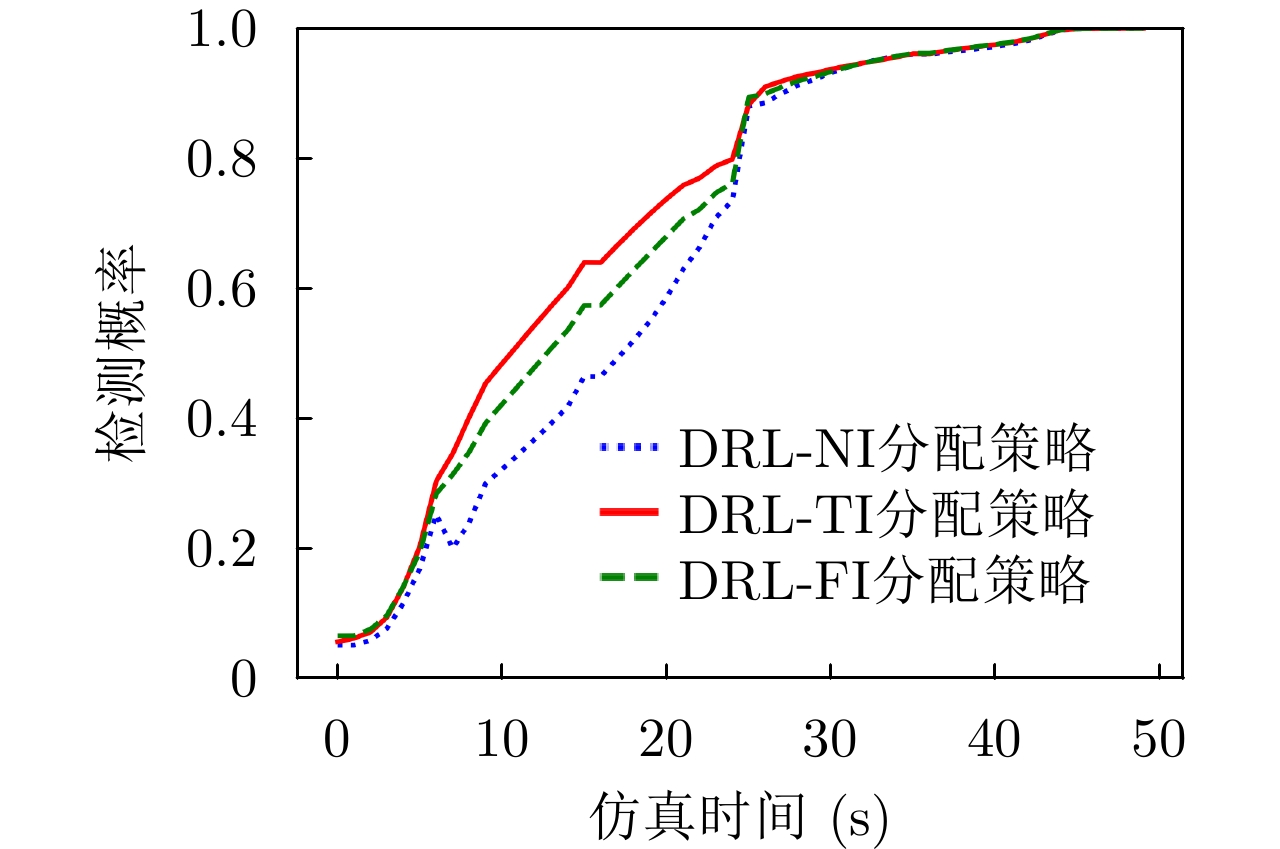
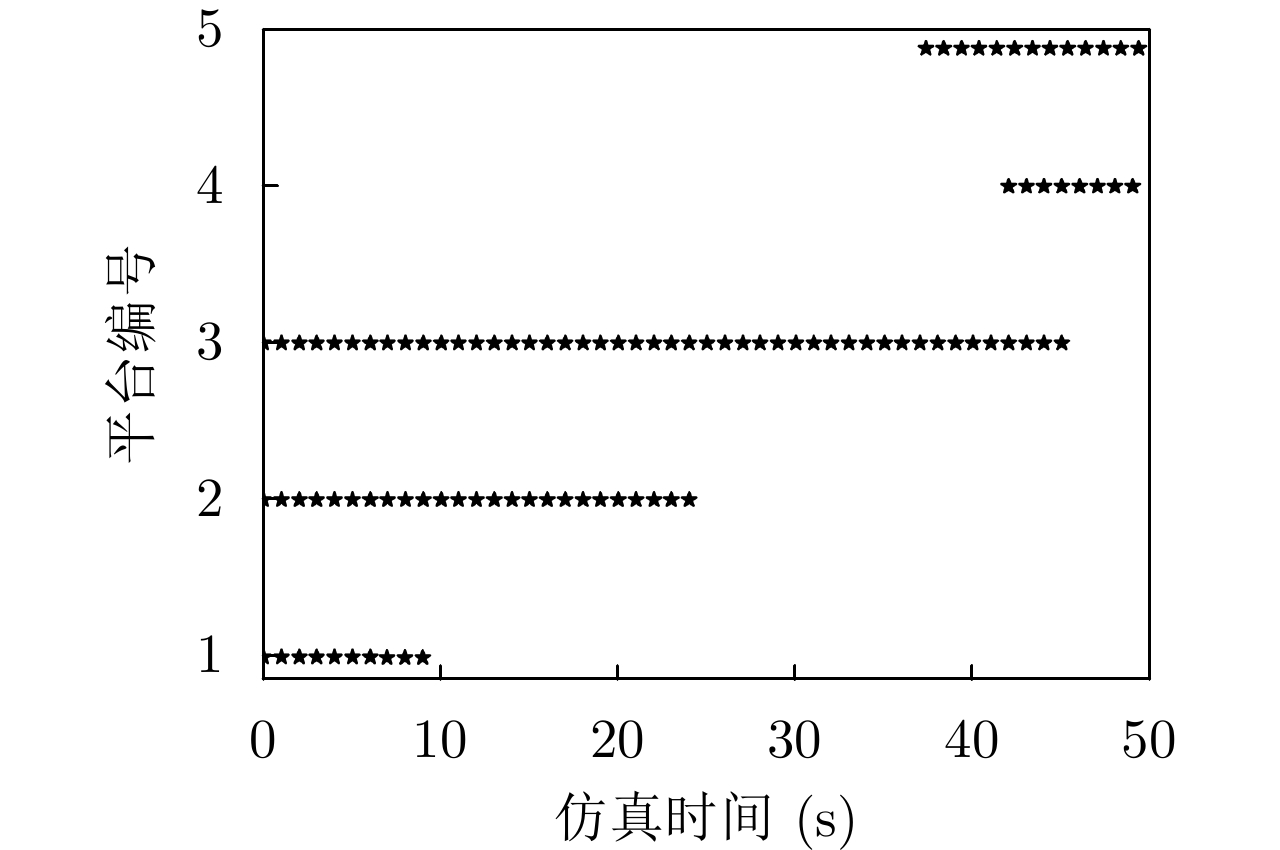
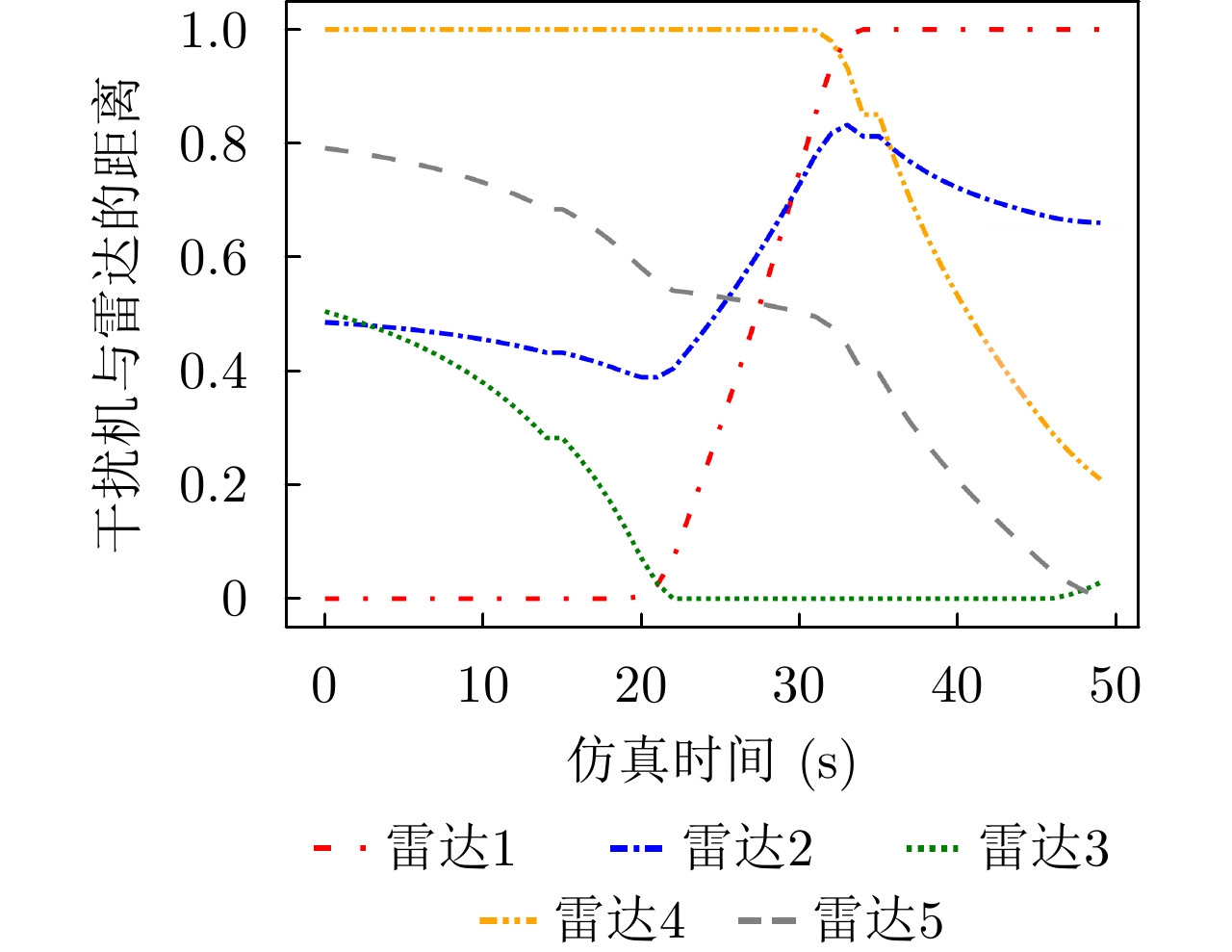
传统的组网雷达功率分配一般在干扰模型给定的情况下进行优化,而干扰机资源优化是在雷达功率分配方式给定情况下,这样的研究缺乏博弈和交互。考虑到日益严重的雷达和干扰机相互博弈的作战场景,该文提出了伴随压制干扰下组网雷达功率分配深度博弈问题,其中智能化的目标压制干扰采用深度强化学习(DRL)训练。首先在该问题中干扰机和组网雷达被映射为两个智能体,根据干扰模型和雷达检测模型建立了压制干扰下组网雷达的目标检测模型和最大化目标检测概率优化目标函数。在组网雷达智能体方面,由近端策略优化(PPO)策略网络生成雷达功率分配向量;在干扰机智能体方面,设计了混合策略网络来同时生成波束选择动作和功率分配动作;引入领域知识构建更加有效的奖励函数,目标检测模型、等功率分配策略和贪婪干扰功率分配策略3种领域知识分别用于生成组网雷达智能体和干扰机智能体的导向奖励,从而提高智能体的学习效率和性能。最后采用交替训练方法来学习两个智能体的策略网络参数。实验结果表明;当干扰机采用基于DRL的资源分配策略时,采用基于DRL的组网雷达功率分配在目标检测概率和运行速度两种指标上明显优于基于粒子群的组网雷达功率分配和基于人工鱼群的组网雷达功率分配。 传统的组网雷达功率分配一般在干扰模型给定的情况下进行优化,而干扰机资源优化是在雷达功率分配方式给定情况下,这样的研究缺乏博弈和交互。考虑到日益严重的雷达和干扰机相互博弈的作战场景,该文提出了伴随压制干扰下组网雷达功率分配深度博弈问题,其中智能化的目标压制干扰采用深度强化学习(DRL)训练。首先在该问题中干扰机和组网雷达被映射为两个智能体,根据干扰模型和雷达检测模型建立了压制干扰下组网雷达的目标检测模型和最大化目标检测概率优化目标函数。在组网雷达智能体方面,由近端策略优化(PPO)策略网络生成雷达功率分配向量;在干扰机智能体方面,设计了混合策略网络来同时生成波束选择动作和功率分配动作;引入领域知识构建更加有效的奖励函数,目标检测模型、等功率分配策略和贪婪干扰功率分配策略3种领域知识分别用于生成组网雷达智能体和干扰机智能体的导向奖励,从而提高智能体的学习效率和性能。最后采用交替训练方法来学习两个智能体的策略网络参数。实验结果表明;当干扰机采用基于DRL的资源分配策略时,采用基于DRL的组网雷达功率分配在目标检测概率和运行速度两种指标上明显优于基于粒子群的组网雷达功率分配和基于人工鱼群的组网雷达功率分配。
传统的组网雷达功率分配一般在干扰模型给定的情况下进行优化,而干扰机资源优化是在雷达功率分配方式给定情况下,这样的研究缺乏博弈和交互。考虑到日益严重的雷达和干扰机相互博弈的作战场景,该文提出了伴随压制干扰下组网雷达功率分配深度博弈问题,其中智能化的目标压制干扰采用深度强化学习(DRL)训练。首先在该问题中干扰机和组网雷达被映射为两个智能体,根据干扰模型和雷达检测模型建立了压制干扰下组网雷达的目标检测模型和最大化目标检测概率优化目标函数。在组网雷达智能体方面,由近端策略优化(PPO)策略网络生成雷达功率分配向量;在干扰机智能体方面,设计了混合策略网络来同时生成波束选择动作和功率分配动作;引入领域知识构建更加有效的奖励函数,目标检测模型、等功率分配策略和贪婪干扰功率分配策略3种领域知识分别用于生成组网雷达智能体和干扰机智能体的导向奖励,从而提高智能体的学习效率和性能。最后采用交替训练方法来学习两个智能体的策略网络参数。实验结果表明;当干扰机采用基于DRL的资源分配策略时,采用基于DRL的组网雷达功率分配在目标检测概率和运行速度两种指标上明显优于基于粒子群的组网雷达功率分配和基于人工鱼群的组网雷达功率分配。 传统的组网雷达功率分配一般在干扰模型给定的情况下进行优化,而干扰机资源优化是在雷达功率分配方式给定情况下,这样的研究缺乏博弈和交互。考虑到日益严重的雷达和干扰机相互博弈的作战场景,该文提出了伴随压制干扰下组网雷达功率分配深度博弈问题,其中智能化的目标压制干扰采用深度强化学习(DRL)训练。首先在该问题中干扰机和组网雷达被映射为两个智能体,根据干扰模型和雷达检测模型建立了压制干扰下组网雷达的目标检测模型和最大化目标检测概率优化目标函数。在组网雷达智能体方面,由近端策略优化(PPO)策略网络生成雷达功率分配向量;在干扰机智能体方面,设计了混合策略网络来同时生成波束选择动作和功率分配动作;引入领域知识构建更加有效的奖励函数,目标检测模型、等功率分配策略和贪婪干扰功率分配策略3种领域知识分别用于生成组网雷达智能体和干扰机智能体的导向奖励,从而提高智能体的学习效率和性能。最后采用交替训练方法来学习两个智能体的策略网络参数。实验结果表明;当干扰机采用基于DRL的资源分配策略时,采用基于DRL的组网雷达功率分配在目标检测概率和运行速度两种指标上明显优于基于粒子群的组网雷达功率分配和基于人工鱼群的组网雷达功率分配。




 微信 | 公众平台
微信 | 公众平台 

