
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
Threat-driven Resource Allocation Algorithm for Distributed Netted Phased Array Radars
-
摘要: 针对分布式组网相控阵雷达多目标跟踪(MTT)场景,该文提出一种目标动态威胁度驱动的波束分配与驻留时间联合优化算法。首先,在采用分布式组网架构的基础上,推导包含波束和驻留时间分配的贝叶斯克拉美罗界(BCRLB)。其次,基于目标实时运动状态构建综合威胁度评估尺度,按照威胁度为不同目标设计基于跟踪精度参考门限和贡献度的效用函数,以此衡量资源在多目标间的优先分配关系。随后,将该效用函数结合组网相控阵雷达系统资源,建立了目标动态威胁度驱动的波束分配与驻留时间联合优化模型。最后,采用一种基于奖励的迭代下降搜索算法进行求解。仿真结果表明,相较于平均资源分配方法,所提算法具备对若干差异性目标的跟踪精度需求感知能力,能够在基于多目标威胁度评估的基础上,有针对性地分配跟踪资源,从而有效提高组网相控阵雷达面对不同威胁度目标时的综合跟踪精度。Abstract: For the Multi-Target Tracking (MTT) of distributed netted phased array radars, this paper proposes a joint beam and dwell time allocation algorithm driven by dynamic threats. First, a Bayesian Cramer-Rao Lower Bound (BCRLB), including beam and dwell time allocation, is derived. Then, a comprehensive threat evaluation scale is constructed based on the real-time motion state of the target, and a utility function based on the tracking accuracy reference threshold and contributed weights is designed for targets with different threats to measure the relationship of resource allocation prioritization among multiple targets. Afterward, an optimal distribution model of the joint beam and the dwell time driven by the dynamic threat of the target is established; the utility function is combined with the resources of the netted phased array radar system. Finally, the problem is solved using a reward-based iterative descent search algorithm, and the effectiveness of the algorithm is verified via simulation. The simulation results show that the proposed algorithm can determine the tracking accuracy requirements of different targets and allocate tracking resources based on the multi-target threat assessment results, thereby improving the comprehensive tracking accuracy of networked phased array radars.
-
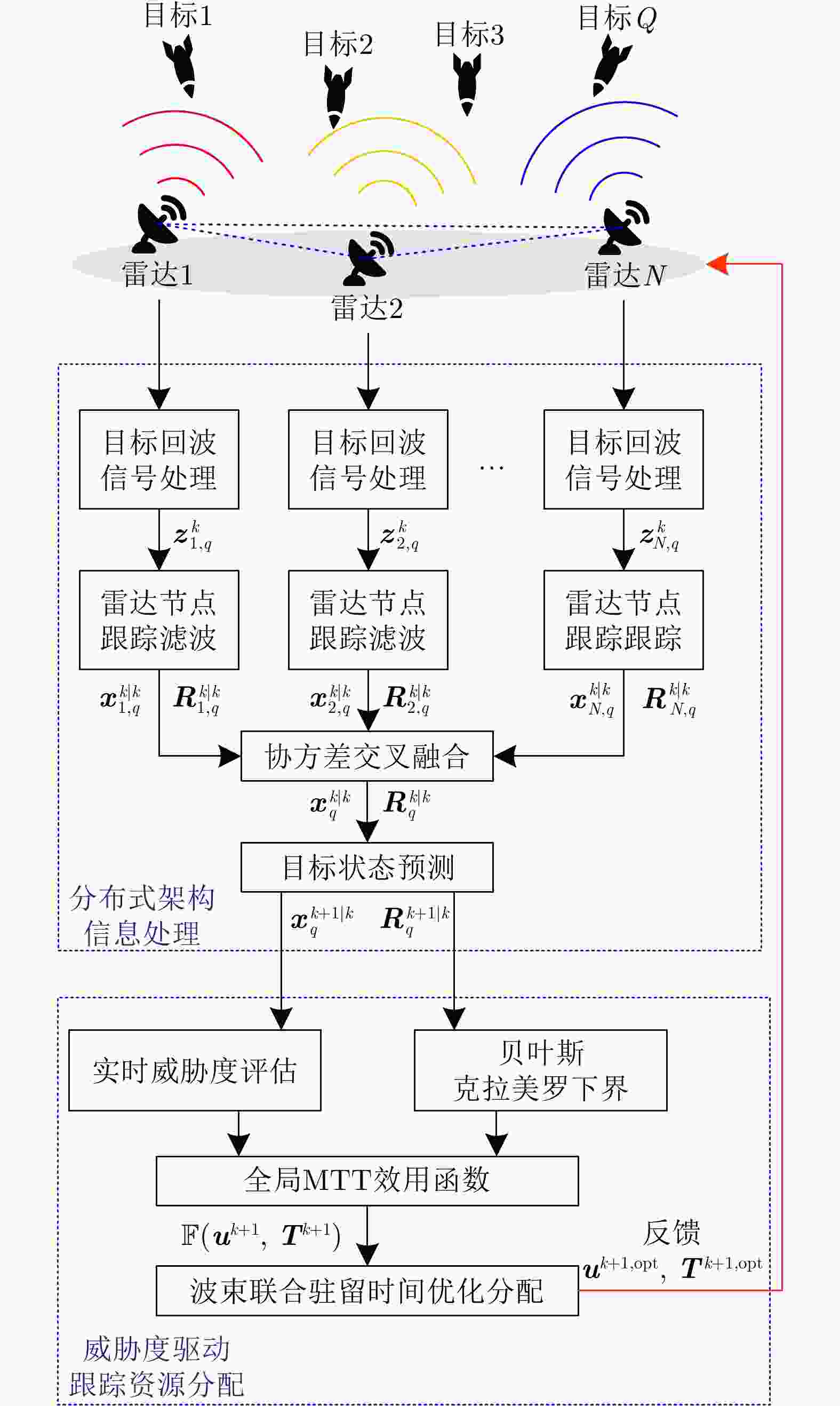
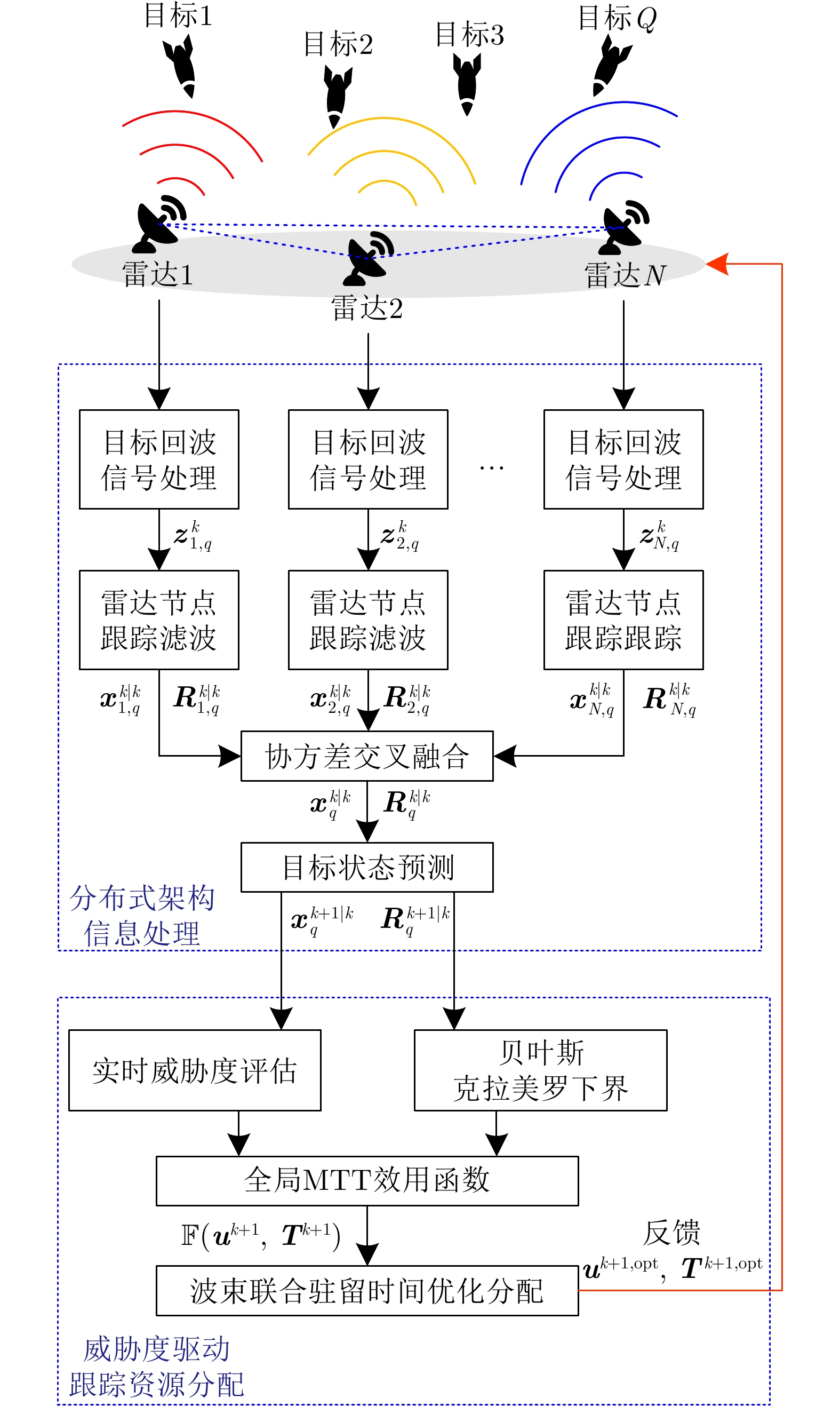
图 1 组网相控阵雷达闭环信息处理流程图
Figure 1. The flowchart of closed-loop information processing in netted phased array radars
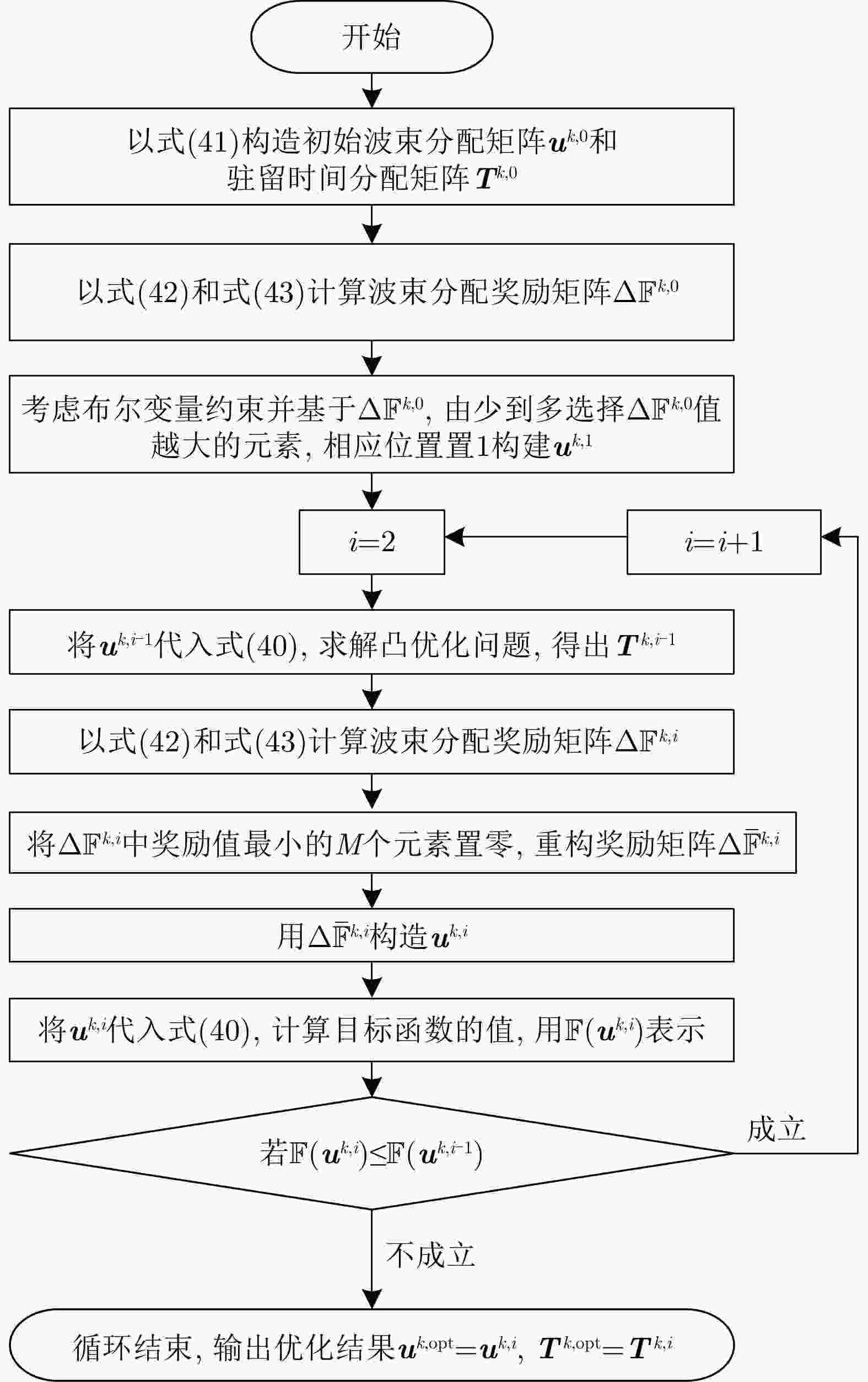
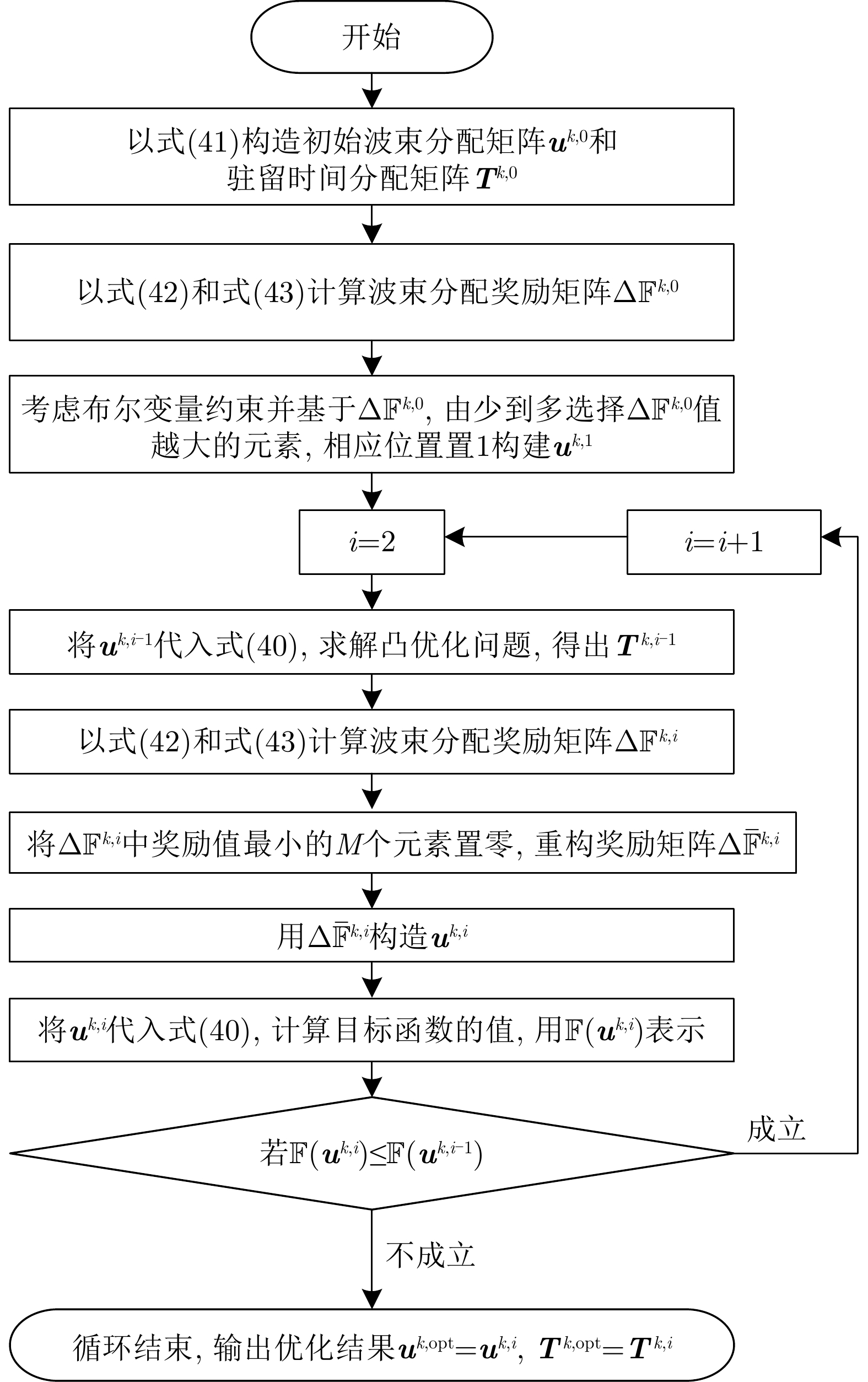
图 2 基于奖励的迭代下降算法程序流程图
Figure 2. The flowchart of the reward-based iterative descending approach
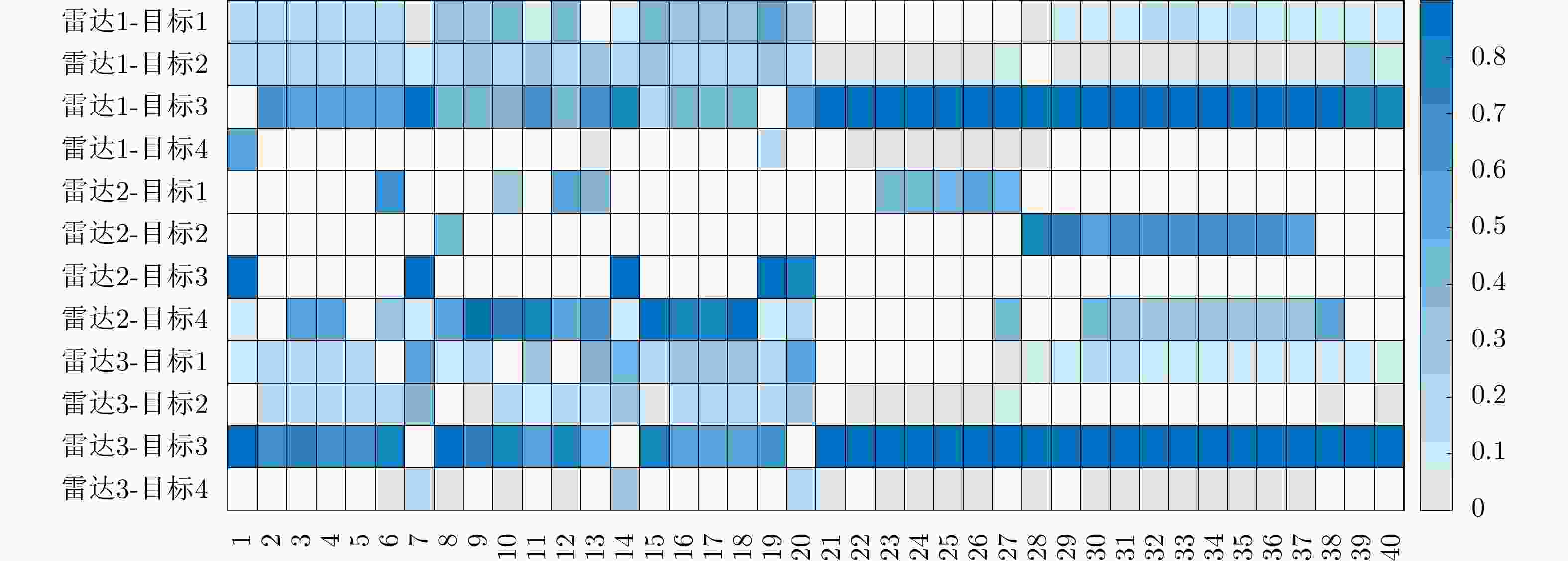
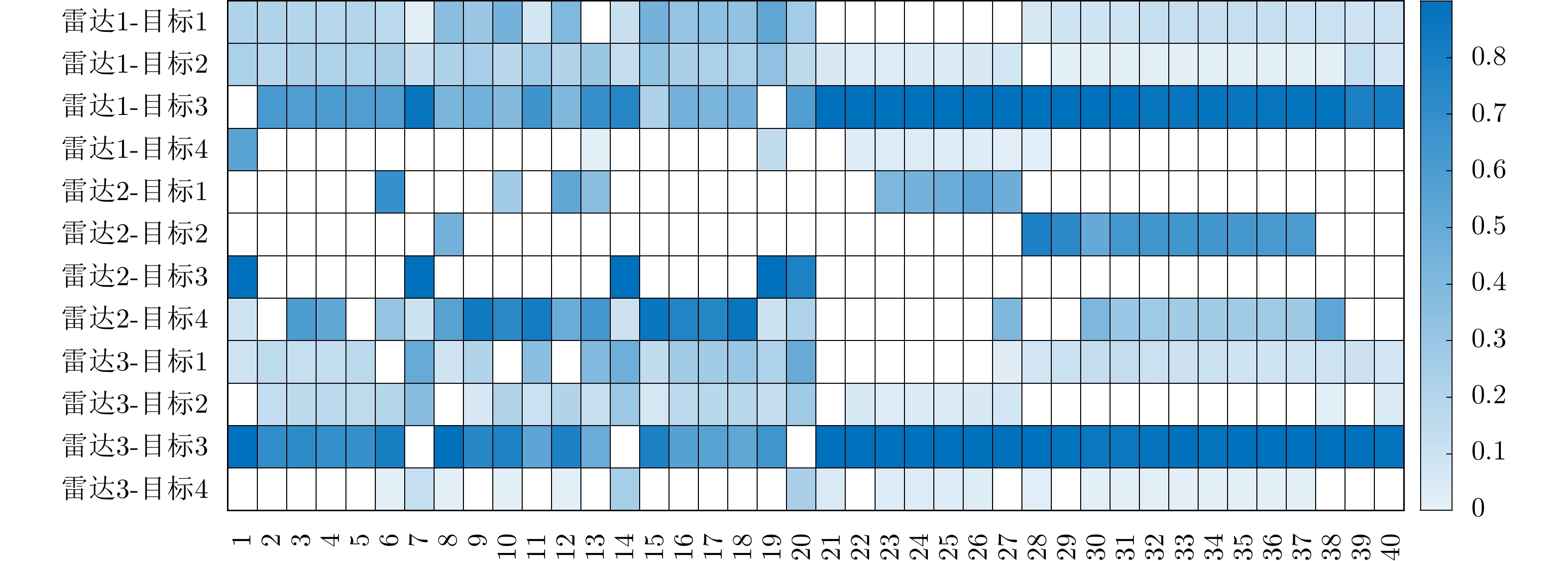
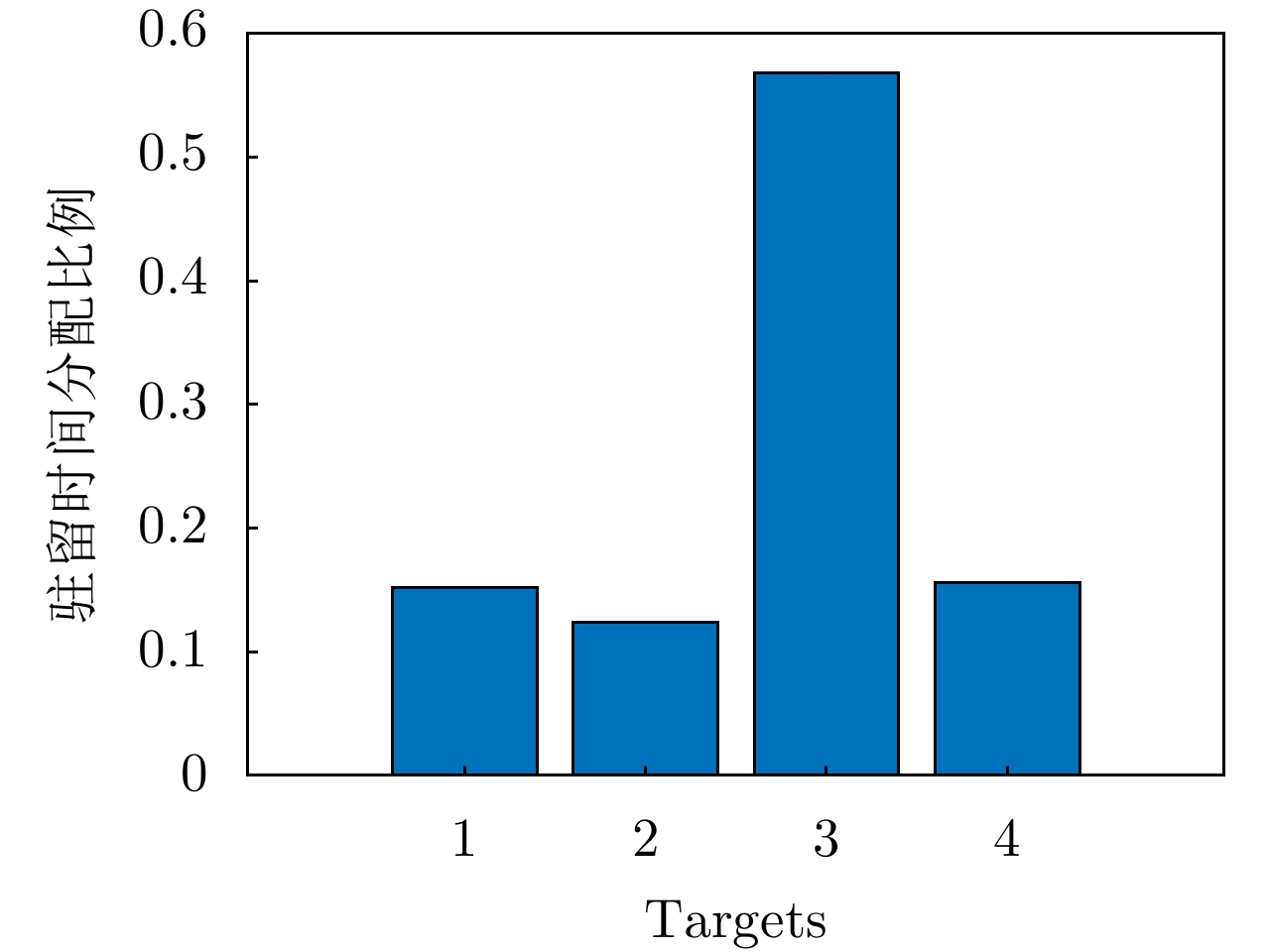
图 5 各雷达节点波束和驻留时间分配结果
Figure 5. Beam and dwell time allocation results for each radar node

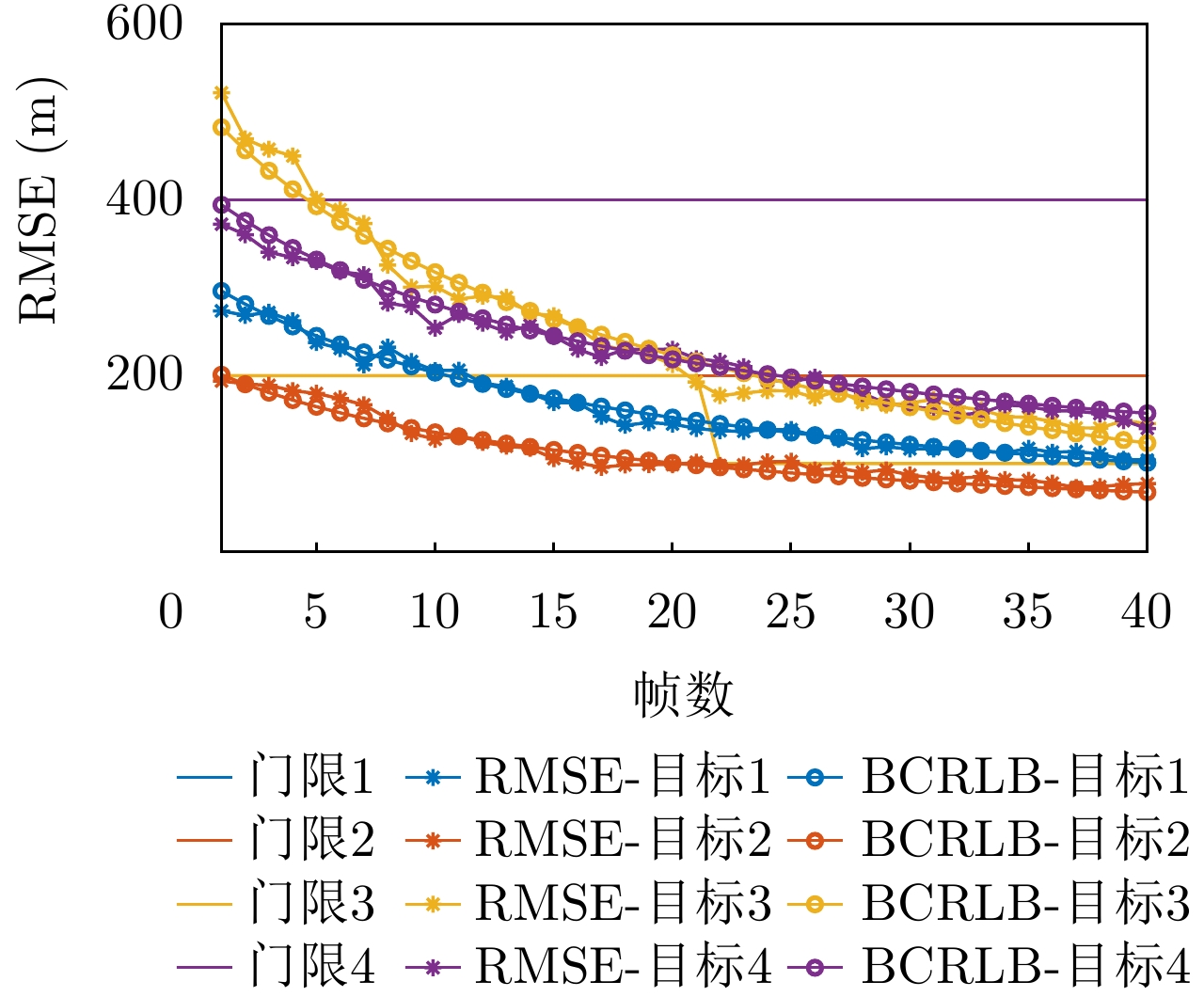
图 7 采用本文算法的各目标RMSE与BCRLB对比图
Figure 7. Comparison of RMSE and BCRLB using the proposed algorithm
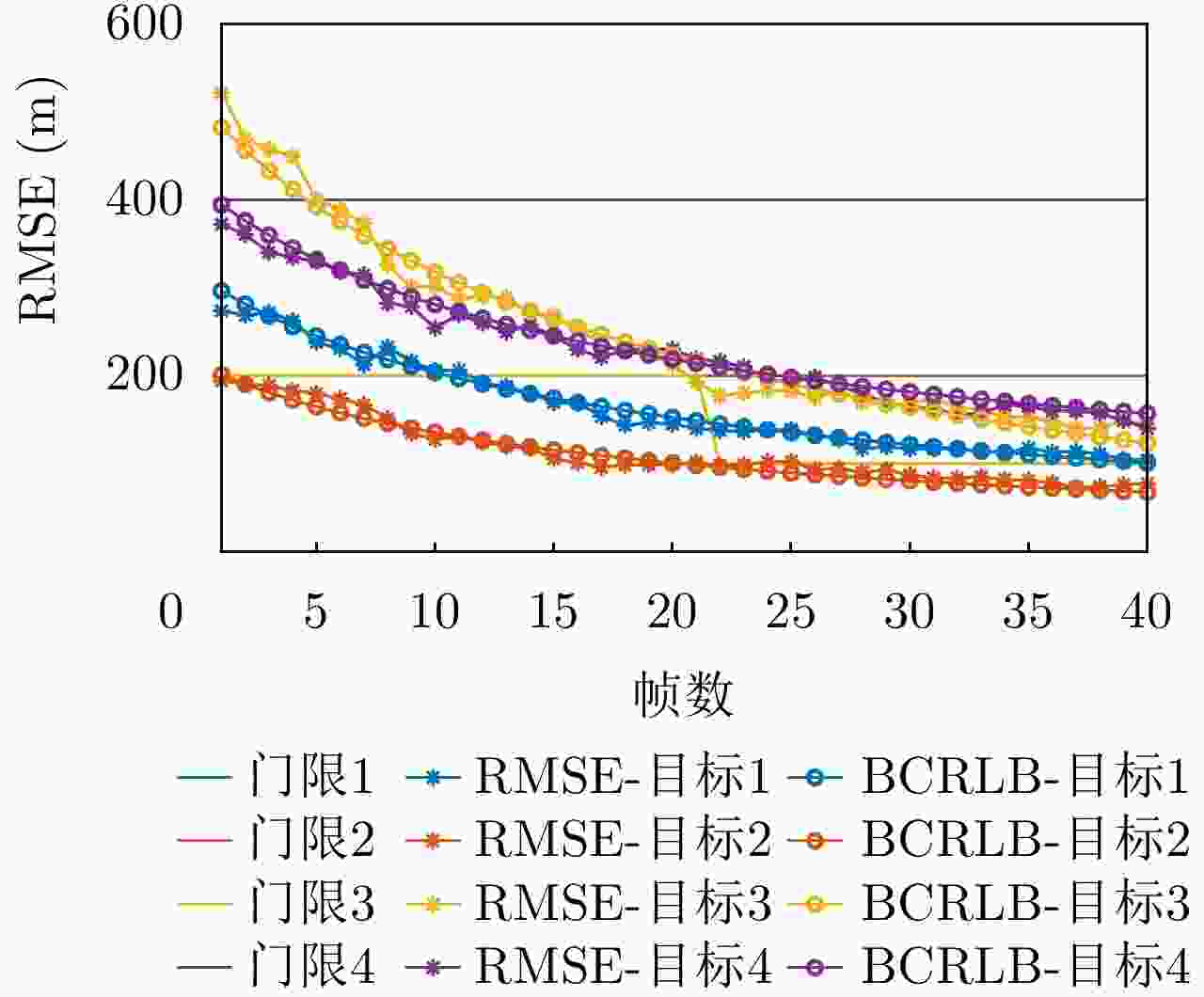
图 8 采用平均资源分配方法的各目标RMSE与BCRLB对比图
Figure 8. Comparison of RMSE and BCRLB using the average resource allocation method
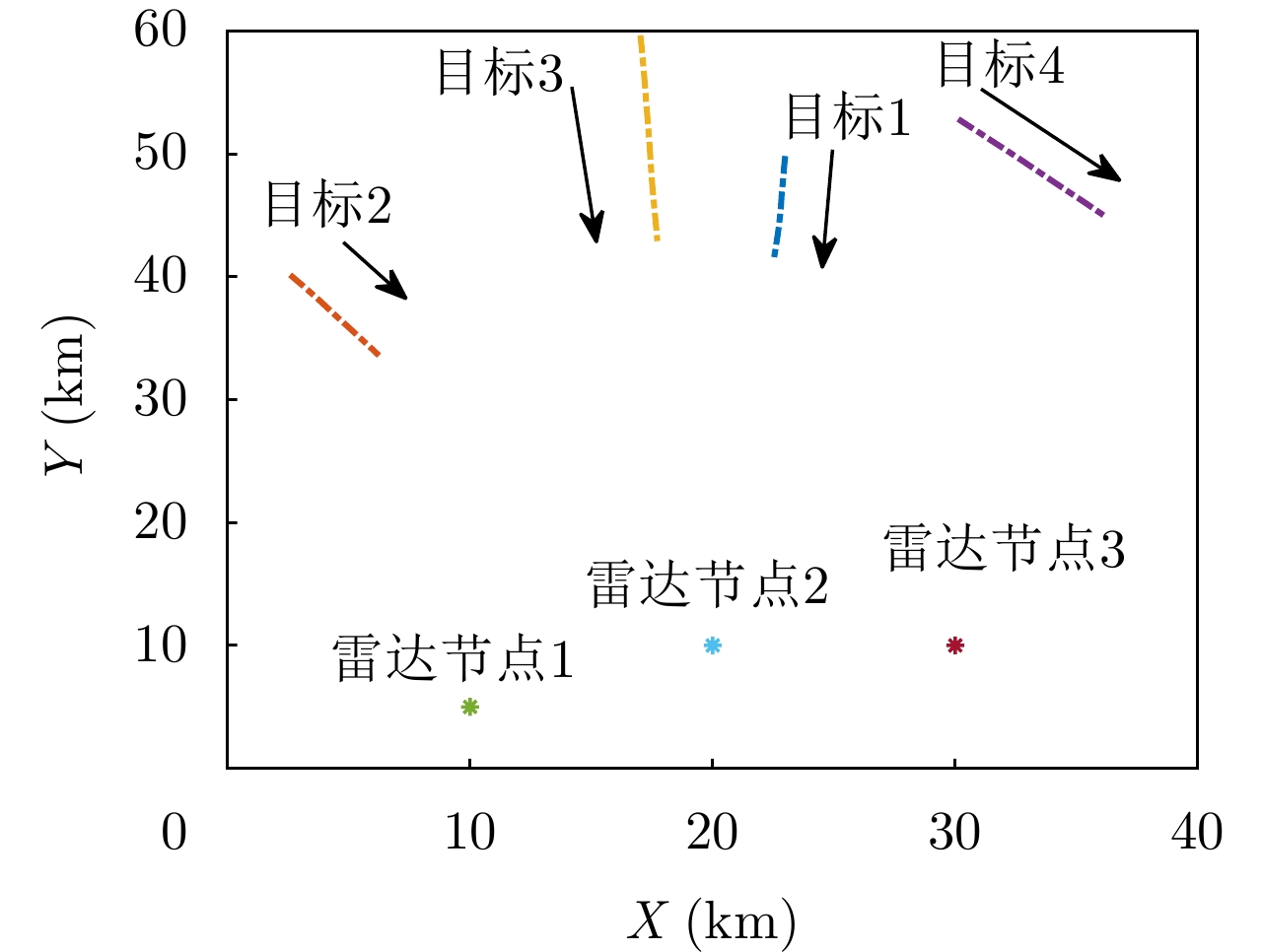
表 1 目标初始运动状态及其相对组网雷达中心的运动参数
Table 1. Initial motion states of targets and their motion parameters relative to the center of the netted radar system
目标标号 目标位置(km) 目标速度(km/s) 相对距离(km) 绝对速度(km/s) 航向角(°) 1 (23, 50) (–0.01, –0.17) 40.11 0.17 0.92 2 (2.5, 40.3) (0.08, –0.14) 34.99 0.16 0.26 3 (17, 60) (0.02, –0.34) 50.09 0.34 0.07 4 (30, 53) (0.12, –0.16) 44.15 0.20 49.96  下载: 导出CSV
下载: 导出CSV
-
[1] 张光义. 相控阵雷达系统[M]. 北京: 国防工业出版社, 2009: 1–24.ZHANG Guangyi. Principles of Phased Array Radar[M]. Beijing: National Defense Industry Press, 2009: 1–24. [2] TAN Qianqian, CHENG Ting, and LI Xi. Online adaptive dwell scheduling based on dynamic template for PAR[J]. Journal of Systems Engineering and Electronics, 2021, 32(5): 1119–1129. doi: 10.23919/JSEE.2021.000096 [3] 卢建斌. 相控阵雷达资源优化管理的理论与方法[D]. [博士论文], 国防科学技术大学, 2007.LU Jianbin. Theory and method of resource optimization and management for phased array radars[D]. [Ph. D. dissertation], National University of Defense Technology, 2007. [4] 王祥丽, 易伟, 孔令讲. 基于多目标跟踪的相控阵雷达波束和驻留时间联合分配方法[J]. 雷达学报, 2017, 6(6): 602–610. doi: 10.12000/JR17045WANG Xiangli, YI Wei, and KONG Lingjiang. Joint beam selection and dwell time allocation for multi-target tracking in phased array radar system[J]. Journal of Radars, 2017, 6(6): 602–610. doi: 10.12000/JR17045 [5] 王祥丽. 相控阵雷达跟踪模式下波束和时间资源管理算法研究[D]. [硕士论文], 电子科技大学, 2018.WANG Xiangli. Research on beam and time resources management algorithm for target tracking in phased array radar[D]. [Master dissertation], University of Electronic Science and Technology of China, 2018. [6] 花汉兵. 雷达组网的特点及其关键技术研究[J]. 现代电子技术, 2007, 30(23): 33–35. doi: 10.3969/j.issn.1004-373X.2007.23.012HUA Hanbing. Study on characteristics and critical technologics of radar networking[J]. Modern Electronics Technique, 2007, 30(23): 33–35. doi: 10.3969/j.issn.1004-373X.2007.23.012 [7] 孙俊, 张大琳, 易伟. 多机协同干扰组网雷达的资源调度方法[J]. 雷达科学与技术, 2022, 20(3): 237–244, 254. doi: 10.3969/j.issn.1672-2337.2022.03.001SUN Jun, ZHANG Dalin, and YI Wei. Resource allocation for multi-jammer cooperatively jamming netted radar systems[J]. Radar Science and Technology, 2022, 20(3): 237–244, 254. doi: 10.3969/j.issn.1672-2337.2022.03.001 [8] 郭冠斌, 方青. 雷达组网技术的现状与发展[J]. 雷达科学与技术, 2005, 3(4): 193–197, 202. doi: 10.3969/j.issn.1672-2337.2005.04.001GUO Guanbin and FANG Qing. Current status and development of radar netting technique[J]. Radar Science and Technology, 2005, 3(4): 193–197, 202. doi: 10.3969/j.issn.1672-2337.2005.04.001 [9] 刘鹏翔, 韩维, 史玮韦, 等. 复杂作战环境下空中目标威胁程度评估[J]. 海军航空工程学院学报, 2010, 25(4): 462–466. doi: 10.3969/j.issn.1673-1522.2010.04.023LIU Pengxiang, HAN Wei, SHI Weiwei, et al. evaluation for the aerial targets’ threat in the complicated environment[J]. Journal of Naval Aeronautical and Astronautical University, 2010, 25(4): 462–466. doi: 10.3969/j.issn.1673-1522.2010.04.023 [10] 吕江涛, 高秉亚, 王高飞. 弹道导弹威胁度评估及其在雷达中的应用[J]. 现代雷达, 2017, 39(12): 20–23, 28. doi: 10.16592/j.cnki.1004-7859.2017.12.004LÜ Jiangtao, GAO Bingya, and WANG Gaofei. Ballistic missile threat assessment and its application in radar[J]. Modern Radar, 2017, 39(12): 20–23, 28. doi: 10.16592/j.cnki.1004-7859.2017.12.004 [11] YAN Junkun, PU Wenqiang, LIU Hongwei, et al. Cooperative target assignment and dwell allocation for multiple target tracking in phased array radar network[J]. Signal Process, 2017, 141: 74–83. doi: 10.1016/j.sigpro.2017.05.014 [12] ZHANG Weiwei, SHI Chenguang, ZHOU Jianjiang, et al. Joint aperture and transmit resource allocation strategy for multi-target localization in phased array radar network[J]. IEEE Transactions on Aerospace and Electronic Systems, 2022: 1–14. doi: 10.1109/TAES.2022.3203688 [13] GODRICH H, PETROPULU A P, and POOR H V. Power allocation strategies for target localization in distributed multiple-radar architectures[J]. IEEE Transactions on Signal Processing, 2011, 59(7): 3226–3240. doi: 10.1109/TSP.2011.2144976 [14] YAN Junkun, LIU Hongwei, PU Wenqiang, et al. Joint beam selection and power allocation for multiple target tracking in netted colocated MIMO radar system[J]. IEEE Transactions on Signal Processing, 2016, 64(24): 6417–6427. doi: 10.1109/TSP.2016.2607147 [15] CHENG Ting, LI Xi, TAN Qianqian, et al. Adaptive time-space resource and waveform control for collocated MIMO radar with simultaneous multi-beam[J]. Journal of Systems Engineering and Electronics, 2022, 33(1): 47–59. doi: 10.23919/JSEE.2022.000006 [16] 时晨光, 董璟, 周建江. 频谱共存下面向多目标跟踪的组网雷达功率时间联合优化算法[J]. 雷达学报, 2023, 12(3): 590–601. doi: 10.12000/JR22146SHI Chenguang, DONG Jing, and ZHOU Jianjiang. Joint transmit power and dwell time allocation for multitarget tracking in radar networks under spectral coexistence[J]. Journal of Radars, 2023, 12(3): 590–601. doi: 10.12000/JR22146 [17] YUAN Ye, YI Wei, HOSEINNEZHAD R, et al. Robust power allocation for resource-aware multi-target tracking with colocated MIMO radars[J]. IEEE Transactions on Signal Processing, 2021, 69: 443–458. doi: 10.1109/TSP.2020.3047519 [18] 许稼, 彭应宁, 夏香根, 等. 基于检测前聚焦的临近空间高动态飞行器雷达探测研究[J]. 雷达学报, 2017, 6(3): 229–238. doi: 10.12000/JR16148XU Jia, PENG Yingning, XIA Xianggen, et al. Focus-before-detection methods for radar detection of near space high-maneuvering aircrafts[J]. Journal of Radars, 2017, 6(3): 229–238. doi: 10.12000/JR16148 [19] XIE Mingchi, YI Wei, KIRUBARAJAN T, et al. Joint node selection and power allocation strategy for multitarget tracking in decentralized radar networks[J]. IEEE Transactions on Signal Processing, 2018, 66(3): 729–743. doi: 10.1109/TSP.2017.2777394 [20] YI Wei, YUAN Ye, HOSEINNEZHAD R, et al. Resource scheduling for distributed multi-target tracking in netted colocated MIMO radar systems[J]. IEEE Transactions on Signal Processing, 2020, 68: 1602–1617. doi: 10.1109/TSP.2020.2976587 [21] SHI Chenguang, WANG Yijie, SALOUS S, et al. Joint transmit resource management and waveform selection strategy for target tracking in distributed phased array radar network[J]. IEEE Transactions on Aerospace and Electronic Systems, 2022, 58(4): 2762–2778. doi: 10.1109/TAES.2021.3138869 [22] ZHANG Haowei, LIU Weijian, ZONG Binfeng, et al. An efficient power allocation strategy for maneuvering target tracking in cognitive MIMO radar[J]. IEEE Transactions on Signal Processing, 2021, 69: 1591–1602. doi: 10.1109/TSP.2020.3047227 [23] YAN Junkun, LIU Hongwei, JIU Bo, et al. Power allocation algorithm for target tracking in unmodulated continuous wave radar network[J]. IEEE Sensors Journal, 2015, 15(2): 1098–1108. doi: 10.1109/JSEN.2014.2360039 [24] 何友, 修建娟, 关欣. 雷达数据处理及应用[M]. 3版. 北京: 电子工业出版社, 2013: 36–38.HE You, XIU Jianjuan, and GUAN Xin. Radar Data Processing with Applications[M]. 3rd ed. Beijing: Publishing House of Electronics Industry, 2013: 36–38. [25] DONG Jing, SHI Chenguang, ZHOU Jianjiang, et al. Joint radar selection and resource allocation for multi-target tracking in radar network under communication interference[C]. 2021 International Conference on Control, Automation and Information Sciences (ICCAIS), Xi’an, China, 2021: 73–77. [26] VAN TREES H L. Detection, Estimation, and Modulation Theory: Radar-Sonar Processing and Gaussian Signals in Noise[M]. New York: John Wiley & Sons, 2001: 275–351. [27] VAN TREES H L. Optimum Array Processing: Part IV of Detection, Estimation, and Modulation Theory[M]. New York: John Wiley & Sons, 2004: 917–1317. [28] 张浩为, 谢军伟, 盛川. 综合优先级规划下的相控阵雷达自适应调度方法[J]. 兵工学报, 2016, 37(11): 2163–2169. doi: 10.3969/j.issn.1000-1093.2016.11.026ZHANG Haowei, XIE Junwei, and SHENG Chuan. Adaptive scheduling algorithm over comprehensive priority for phased array radar[J]. Acta Armamentarii, 2016, 37(11): 2163–2169. doi: 10.3969/j.issn.1000-1093.2016.11.026 [29] 张恺桐, 闫涛, 韩崇昭, 等. 基于威胁程度的目标跟踪传感器管理方法[J]. 指挥信息系统与技术, 2022, 13(1): 39–44. doi: 10.15908/j.cnki.cist.2022.01.007ZHANG Kaitong, YAN Tao, HAN Chongzhao, et al. Target tracking sensor management method based on threat degree[J]. Command Information System and Technology, 2022, 13(1): 39–44. doi: 10.15908/j.cnki.cist.2022.01.007 [30] KATSILIERIS F, DRIESSEN H, and YAROVOY A. Threat-based sensor management for target tracking[J]. IEEE Transactions on Aerospace and Electronic Systems, 2015, 51(4): 2772–2785. doi: 10.1109/TAES.2015.140052 [31] EL-FALLAH A, ZATEZALO A, MAHLER R, et al. Unified Bayesian situation assessment sensor management[C]. SPIE 5809, Signal Processing, Sensor Fusion, and Target Recognition XIV, Orlando, United States, 2005: 253–264. [32] RIBEIRO M I. Kalman and extended Kalman filters: Concept, derivation and properties[J]. Institute for Systems and Robotics, 2004,, 43(46): 3736–3741. [33] JULIER S J and UHLMANN J K. A non-divergent estimation algorithm in the presence of unknown correlations[C]. 1997 American Control Conference, Albuquerque, USA, 1997: 2369–2373. [34] YAN Junkun, JIAO Hao, PU Wenqiang, et al. Radar sensor network resource allocation for fused target tracking: A brief review[J]. Information Fusion, 2022, 86/87: 104–115. doi: 10.1016/j.inffus.2022.06.009 [35] 陈辉, 贺忠良, 连峰, 等. 多目标跟踪中基于目标威胁度评估的传感器控制方法[J]. 电子与信息学报, 2018, 40(12): 2861–2867. doi: 10.11999/JEIT180212CHEN Hui, HE Zhongliang, LIAN Feng, et al. Threat assessment based sensor control for multi-target tracking[J]. Journal of Electronics &Information Technology, 2018, 40(12): 2861–2867. doi: 10.11999/JEIT180212 [36] TICHAVSKY P, MURAVCHIK C H, and NEHORAI A. Posterior Cramer-Rao bounds for discrete-time nonlinear filtering[J]. IEEE Transactions on Signal Processing, 1998, 46(5): 1386–1396. doi: 10.1109/78.668800 [37] BURER S and LETCHFORD A N. Non-convex mixed-integer nonlinear programming: A survey[J]. Surveys in Operations Research and Management Science, 2012, 17(2): 97–106. doi: 10.1016/j.sorms.2012.08.001 -


计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

