
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
Flight Path Optimization Method for Dynamic Area Coverage Based on Multi-aircraft Radars
-
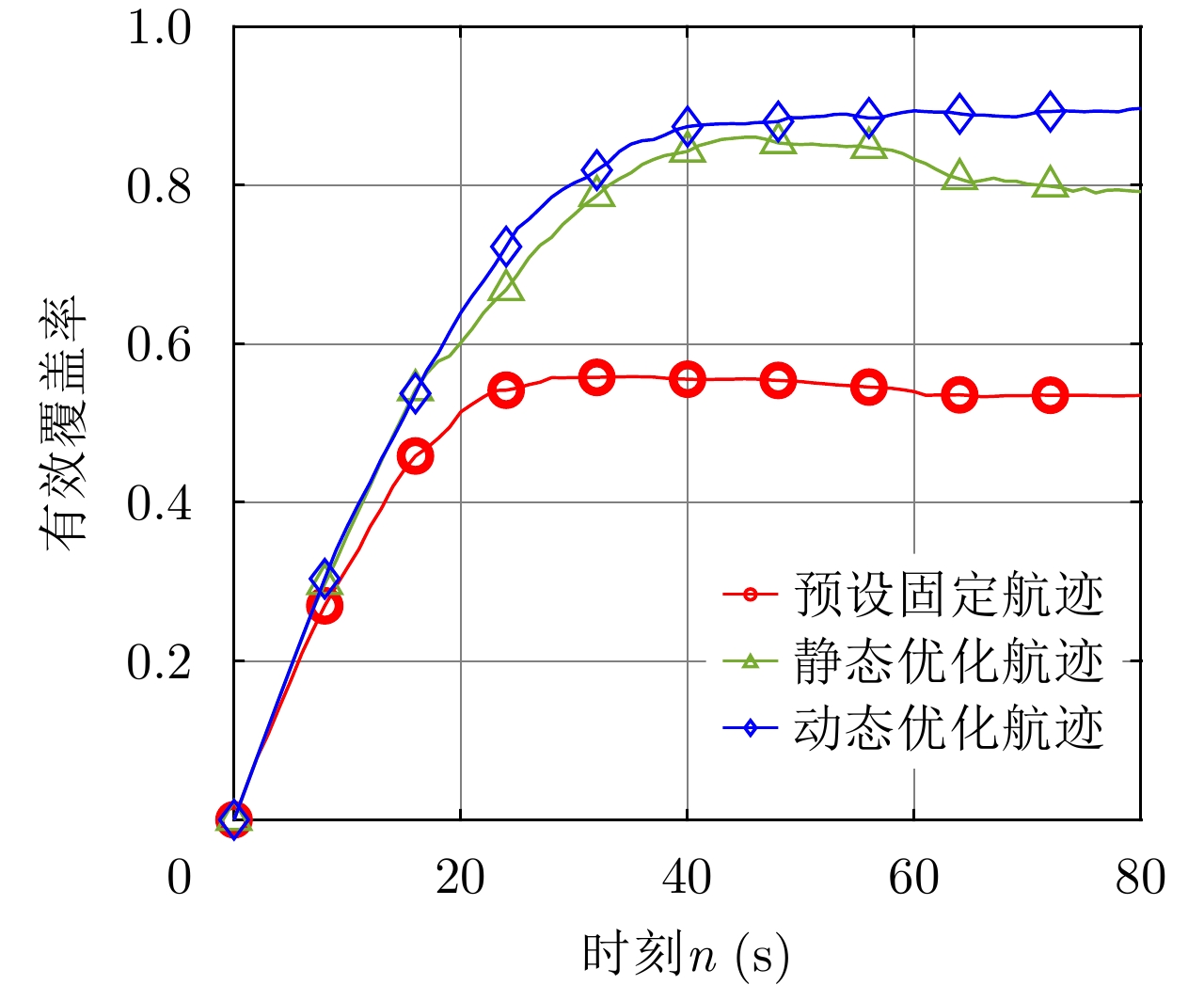
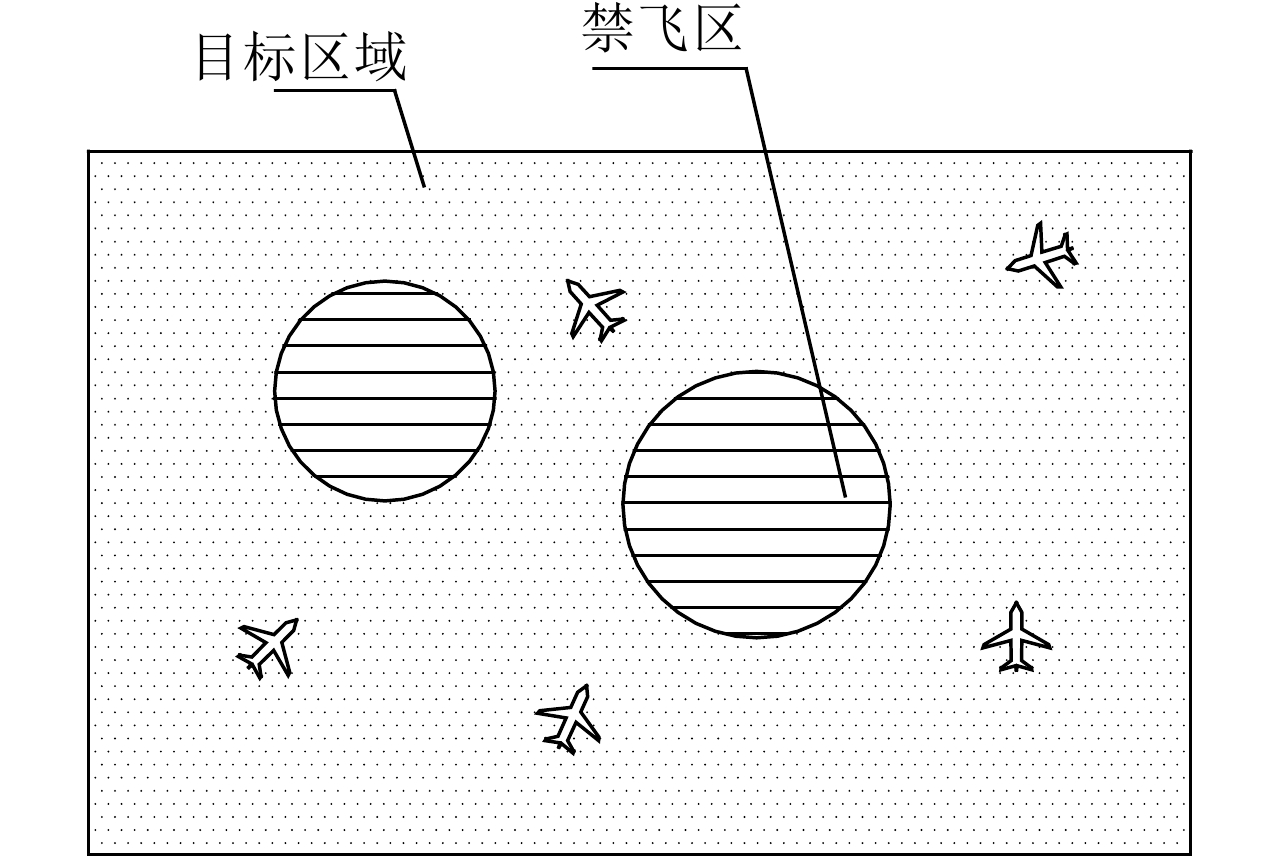
摘要: 传统面向区域覆盖的多机航迹优化方法大多针对静态环境建立优化模型,在复杂动态环境下面临着模型失配的挑战。因此,该文提出了一种多机雷达协同区域动态覆盖航迹优化方法。首先,该方法引入衰减因子来表征机载雷达对动态环境的实际覆盖效果,将动态覆盖背景下的区域覆盖率作为优化函数,并结合待优化多维航迹控制参数约束,构建了多机雷达协同区域动态覆盖航迹优化的数学模型。然后,采用随机优化法对协同区域动态覆盖航迹优化问题进行了求解。最后,仿真实验表明,相对于采用预设航迹的多机雷达搜索模式,所提航迹优化方法能够显著提高动态区域的动态覆盖性能,且相较于面向静态环境的传统航迹优化模型,动态覆盖性能平均提升约6%。Abstract: Most traditional multi-aircraft flight path optimization methods are oriented toward area coverage, use static optimization models, and face the challenge of model mismatch under complex dynamic environments. Therefore, this study proposes a flight path optimization method for dynamic area coverage based on multi-aircraft radars. First, we introduce an attenuation factor to this method to characterize the actual coverage effect of airborne radar on a dynamic environment, and we take the area coverage rate under the dynamic area coverage background as the optimization function. After integrating the constraints of multi-dimensional flight path control parameters to be optimized, we built a mathematical model for dynamic area coverage flight path optimization based on multi-aircraft radars. Then, the stochastic optimization method is used to solve the flight path optimization problem of dynamic area coverage. Finally, the simulation results show that the proposed flight path optimization method can significantly improve the dynamic coverage performance in dynamic areas compared with the search mode using preset flight paths based on multi-aircraft radars. Compared with the traditional flight path optimization method oriented to static environments, the dynamic coverage performance of our proposed method is improved by approximately 6% on average.
-
图 3 衰减因子随时刻差值变化曲线图
Figure 3. Curves of attenuation factor variation with time difference

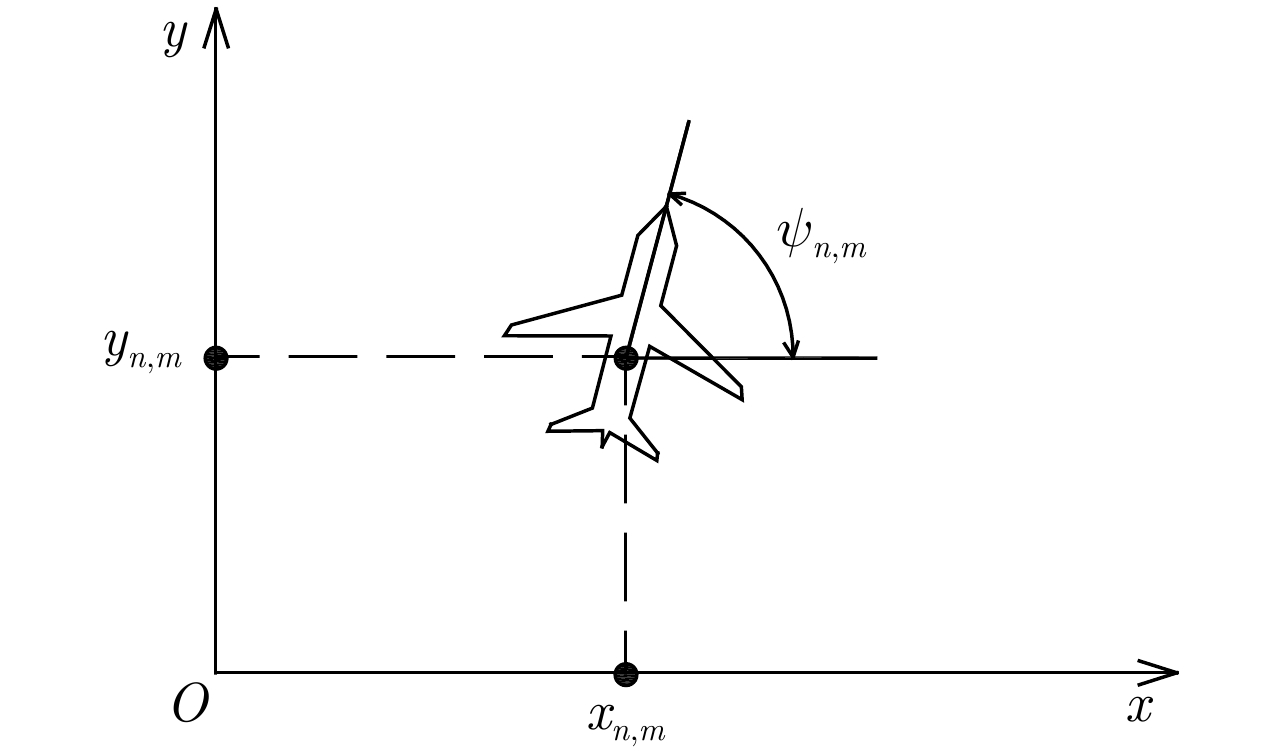
图 5 零时刻无人机航迹控制参数示意图
Figure 5. Examples of flight path control parameters at the zero time
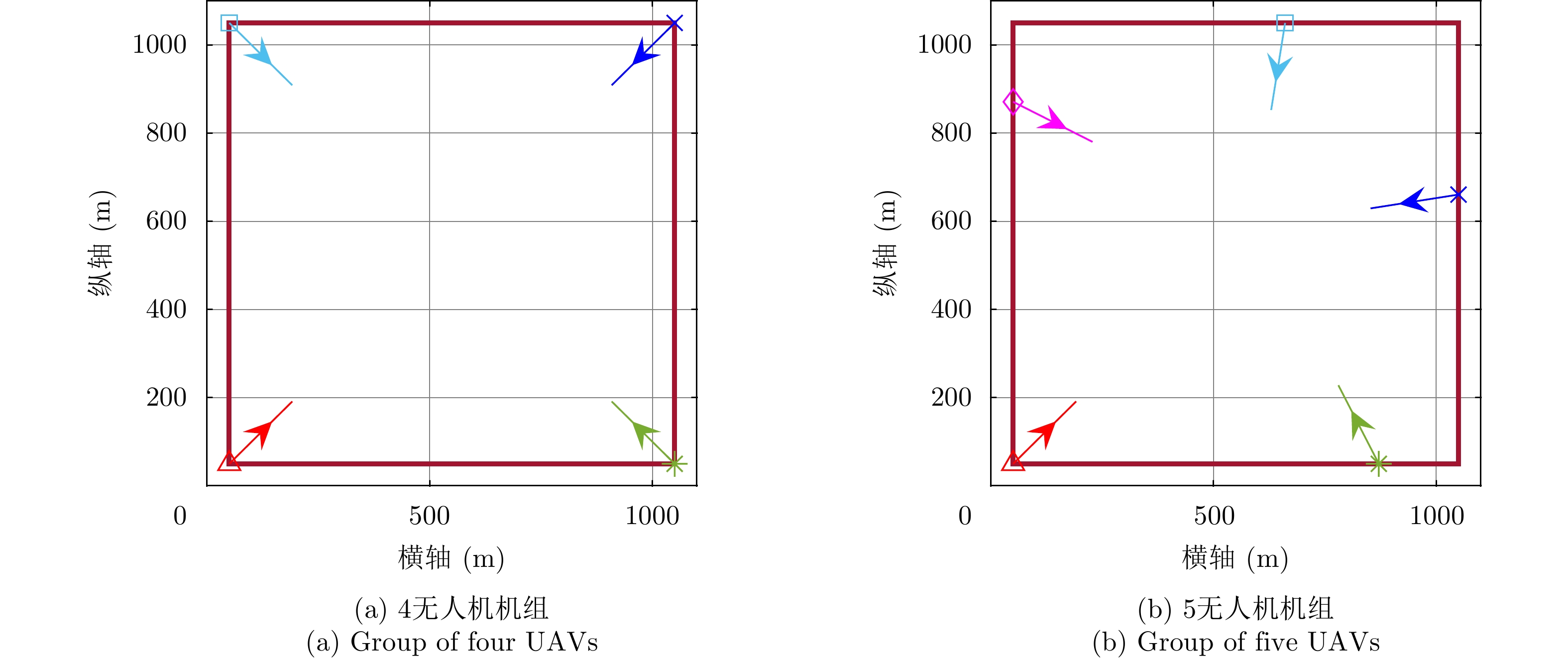
图 9 传统静态优化方法所得大致航迹图
Figure 9. Rough flight path of traditional static optimization method

图 10 3种搜索方法有效覆盖率曲线对比图
Figure 10. Comparison between curves of effective coverage rate variation of three searching methods
表 1 优化模型运行流程示意表
Table 1. Running process of the optimization model
步骤 流程内容 ① 计算基于时刻n的各时刻${\alpha _i}\left( n \right)$,$i = 1,2, \cdots ,n$ ② 设置待优化无人机编号$m = 1$ ③ 基于待优化无人机时刻$ n - 1 $的解,生成可行解数量为${q_{\max }}$的解空间${ {\boldsymbol{C} }_n} = \left\{ {{\boldsymbol{c}}'_1,{\boldsymbol{c}}'_2, \cdots ,{\boldsymbol{c}}_{ {q_{\max } } }'} \right\}$ ④ 求解待优化无人机时刻n的解${{\boldsymbol{c}}_n} \in {{\boldsymbol{C}}_n}$,使${{\boldsymbol{c}}_n}$对应的有效覆盖率为${{\boldsymbol{C}}_n}$中最大 ⑤ 令$m = m + 1$,若$m \le M$则返回步骤③ ⑥ 令$n = n + 1$,优化程序进入下一时刻  下载: 导出CSV
下载: 导出CSV
表 2 仿真参数设定表
Table 2. Simulation parameter settings
参数 设定值 ${R_0}$ 90 m ${\varphi _0}$ $\dfrac{2}{3}\pi$ ${t_d}$ 1 s ${L_{\max }}$ 200 m $\Delta {\psi _{\max }}$ $\dfrac{1}{4}\pi$ ${n_\alpha }$ 60 s $\gamma $ 10 ${q_{\max }}$ 100
下载: 导出CSV
-
[1] AGARWAL A, LIM M H, ER M J, et al. ACO for a new TSP in region coverage[C]. 2005 IEEE/RSJ International Conference on Intelligent Robots and Systems, Edmonton, Canada, 2005: 1717–1722. [2] YAN Junkun, JIAO Hao, PU Wenqiang, et al. Radar sensor network resource allocation for fused target tracking: A brief review[J]. Information Fusion, 2022, 86/87: 104–115. doi: 10.1016/j.inffus.2022.06.009 [3] YAN Junkun, PU Wenqiang, ZHOU Shenghua, et al. Optimal resource allocation for asynchronous multiple targets tracking in heterogeneous radar networks[J]. IEEE Transactions on Signal Processing, 2020, 68: 4055–4068. doi: 10.1109/TSP.2020.3007313 [4] YAN Junkun, PU Wenqiang, ZHOU Shenghua, et al. Collaborative detection and power allocation framework for target tracking in multiple radar system[J]. Information Fusion, 2020, 55: 173–183. doi: 10.1016/j.inffus.2019.08.010 [5] YI Wei, YUAN Ye, HOSEINNEZHAD R, et al. Resource scheduling for distributed multi-target tracking in netted colocated MIMO radar systems[J]. IEEE Transactions on Signal Processing, 2020, 68: 1602–1617. doi: 10.1109/TSP.2020.2976587 [6] 李春霄, 王冠绪, 殷辉, 等. 面向目标跟踪任务的蜂群无人机雷达协同航迹规划方法[J]. 战术导弹技术, 2021(6): 30–37. doi: 10.16358/j.issn.1009-1300.2021.1.561LI Chunxiao, WANG Guanxu, YIN Hui, et al. Target tracking task-oriented cooperative path planning method for swarm UAV radar[J]. Tactical Missile Technology, 2021(6): 30–37. doi: 10.16358/j.issn.1009-1300.2021.1.561 [7] 时晨光, 王奕杰, 代向荣, 等. 面向目标跟踪的机载组网雷达辐射参数与航迹规划联合优化算法[J]. 雷达学报, 2022, 11(5): 778–793. doi: 10.12000/JR22005SHI Chenguang, WANG Yijie, DAI Xiangrong, et al. Joint transmit resources and trajectory planning for target tracking in airborne radar networks[J]. Journal of Radars, 2022, 11(5): 778–793. doi: 10.12000/JR22005 [8] BESADA-PORTAS E, DE LA TORRE L, DE LA CRUZ J M, et al. Evolutionary trajectory planner for multiple UAVs in realistic scenarios[J]. IEEE Transactions on Robotics, 2010, 26(4): 619–634. doi: 10.1109/TRO.2010.2048610 [9] BERGER C, WZOREK M, KVARNSTRÖM J, et al. Area coverage with heterogeneous UAVs using scan patterns[C]. 2016 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), Lausanne, Switzerland, 2016: 342–349. [10] 王自亮, 罗德林, 吴顺祥. 凹多边形区域覆盖无人机航迹规划方法[J]. 航空兵器, 2019, 26(1): 95–100. doi: 10.12132/ISSN.1673-5048.2018.0068WANG Ziliang, LUO Delin, and WU Shunxiang. A UAV path planning method for concave polygonal area coverage[J]. Aero Weaponry, 2019, 26(1): 95–100. doi: 10.12132/ISSN.1673-5048.2018.0068 [11] 张小孟, 胡永江, 李文广, 等. 一种改进的多无人机覆盖航迹规划方法[J]. 兵器装备工程学报, 2020, 41(10): 215–221. doi: 10.11809/bqzbgcxb2020.10.040ZHANG Xiaomeng, HU Yongjiang, LI Wenguang, et al. Improved method for coverage track planning of multi-UAV[J]. Journal of Ordnance Equipment Engineering, 2020, 41(10): 215–221. doi: 10.11809/bqzbgcxb2020.10.040 [12] SUGIMOTO K, HATANAKA T, FUJITA M, et al. Experimental study on persistent coverage control with information decay[C]. The 54th Annual Conference of the Society of Instrument and Control Engineers of Japan (SICE), Hangzhou, China, 2015: 164–169. [13] LI Weimin, WEI Dingmei, ZHOU Xiaokang, et al. F-SWIR: Rumor Fick-spreading model considering fusion information decay in social networks[J]. Concurrency and Computation: Practice and Experience, 2022, 34(22): e7166. doi: 10.1002/CPE.7166 [14] 陈伯孝, 杨林, 魏青. 雷达原理与系统[M]. 西安: 西安电子科技大学出版社, 2021: 22–24.CHEN Boxiao, YANG Lin, and WEI Qing. Radar Principle and System[M]. Xi’an: Xidian University Press, 2021: 22–24. [15] 张弘, 魏榕祥. 通用飞机抗坠撞设计指南[M]. 北京: 航空工业出版社, 2009: 13–14.ZHANG Hong and ZHANG Rongxiang. General Aircraft Crashworthiness Design Guide[M]. Beijing: Aviation Industry Press, 2009: 13–14. [16] FOUSKAKIS D and DRAPER D. Stochastic optimization: A review[J]. International Statistical Review, 2002, 70(3): 315–349. doi: 10.1111/j.1751-5823.2002.tb00174.x [17] 彭辉, 沈林成, 霍霄华. 多UAV协同区域覆盖搜索研究[J]. 系统仿真学报, 2007, 19(11): 2472–2476. doi: 10.16182/j.cnki.joss.2007.11.022PENG Hui, SHEN Lincheng, and HUO Xiaohua. Research on multiple UAV cooperative area coverage searching[J]. Journal of System Simulation, 2007, 19(11): 2472–2476. doi: 10.16182/j.cnki.joss.2007.11.022 -




计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

