
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公2019年 8卷 第2期
 上一期
上一期
2019, 8(2): 171-177.
 摘要
摘要 1705KB
1705KB
摘要:
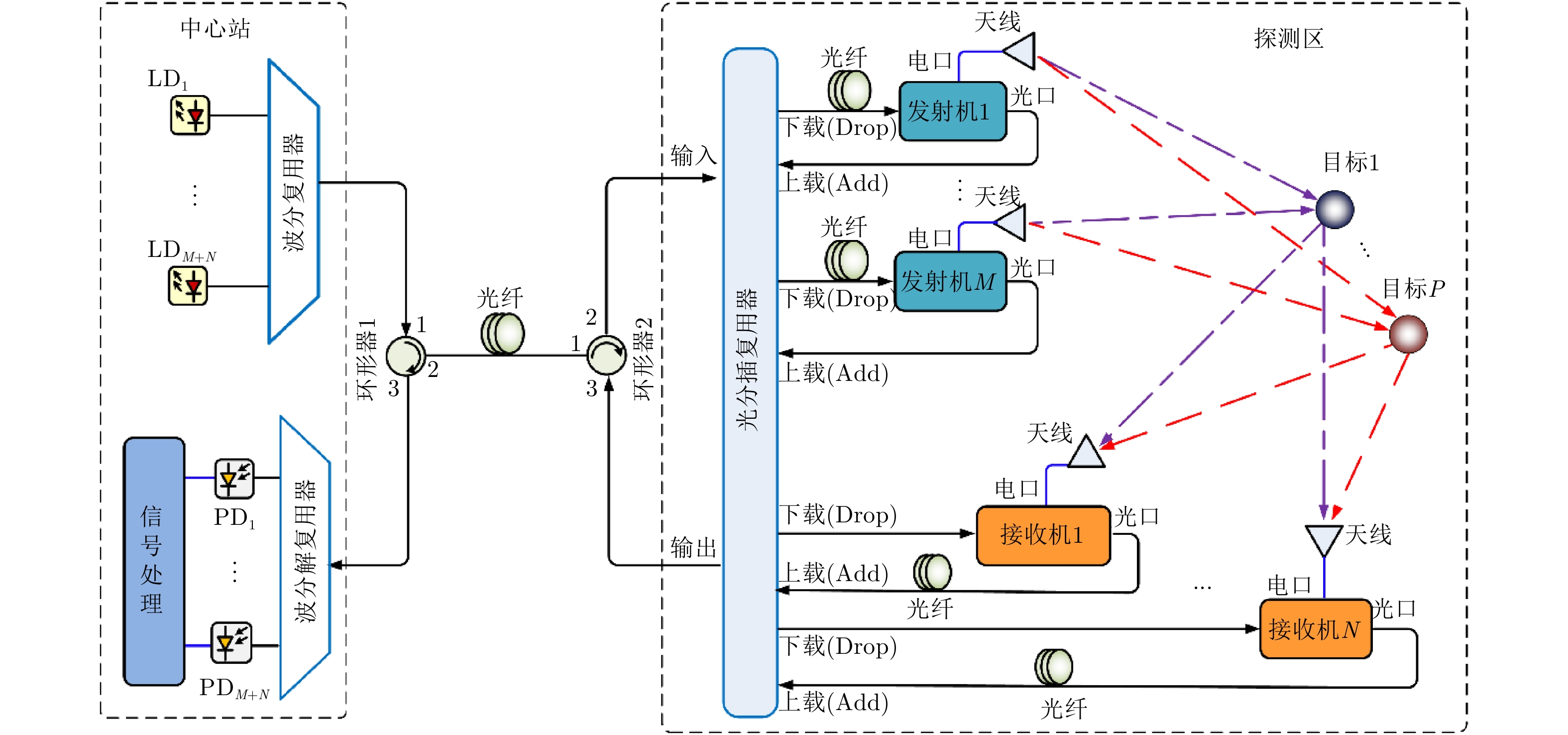
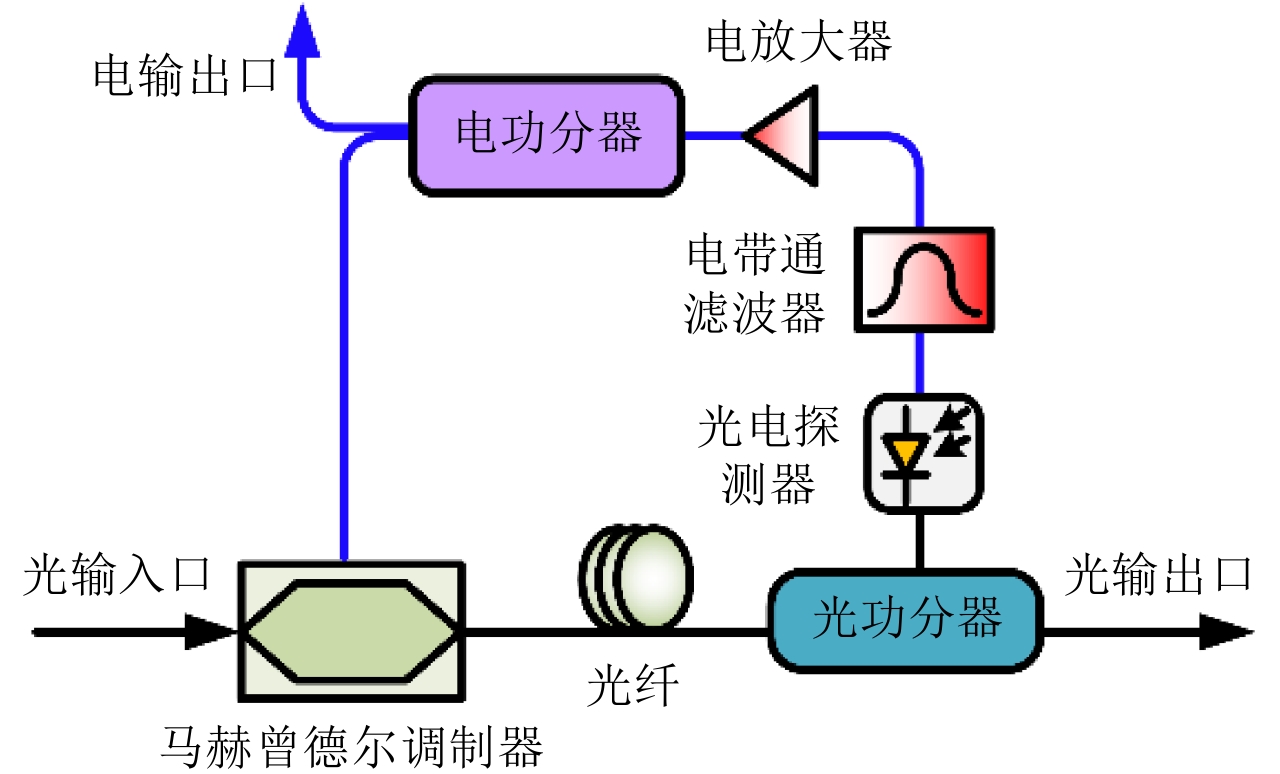
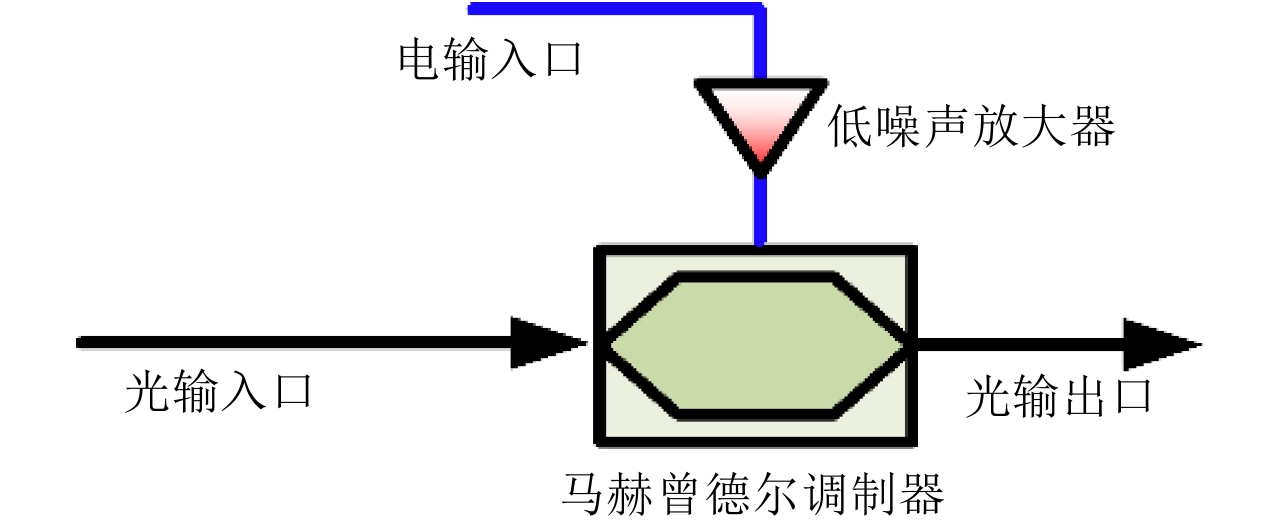
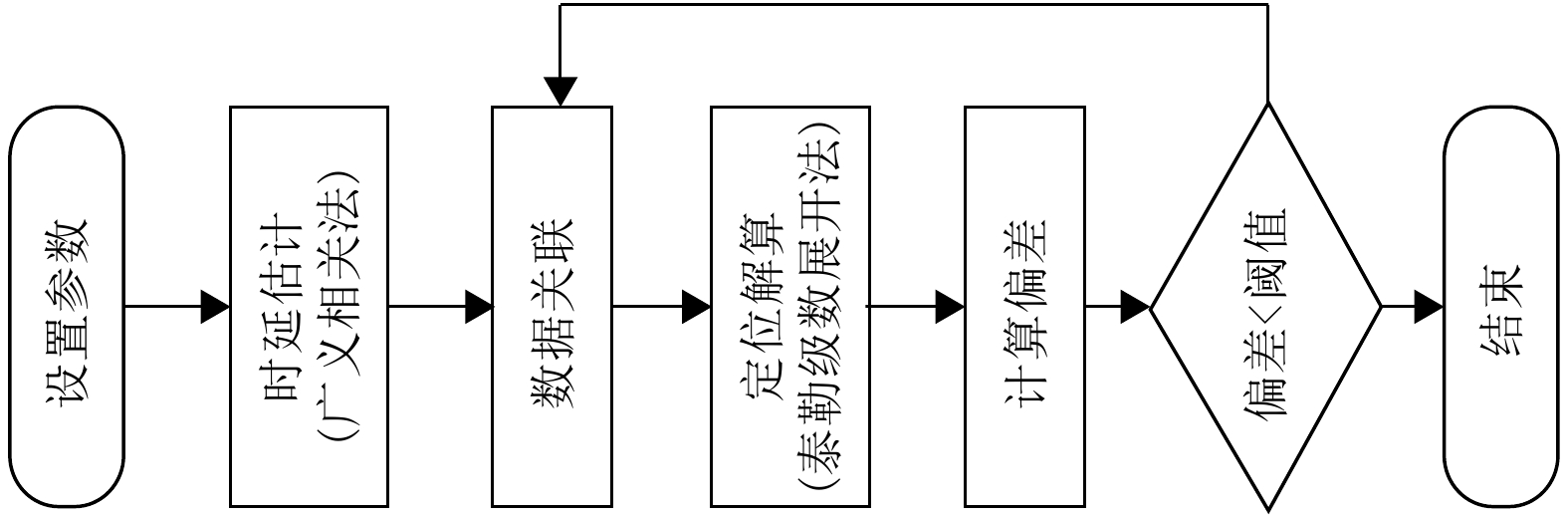
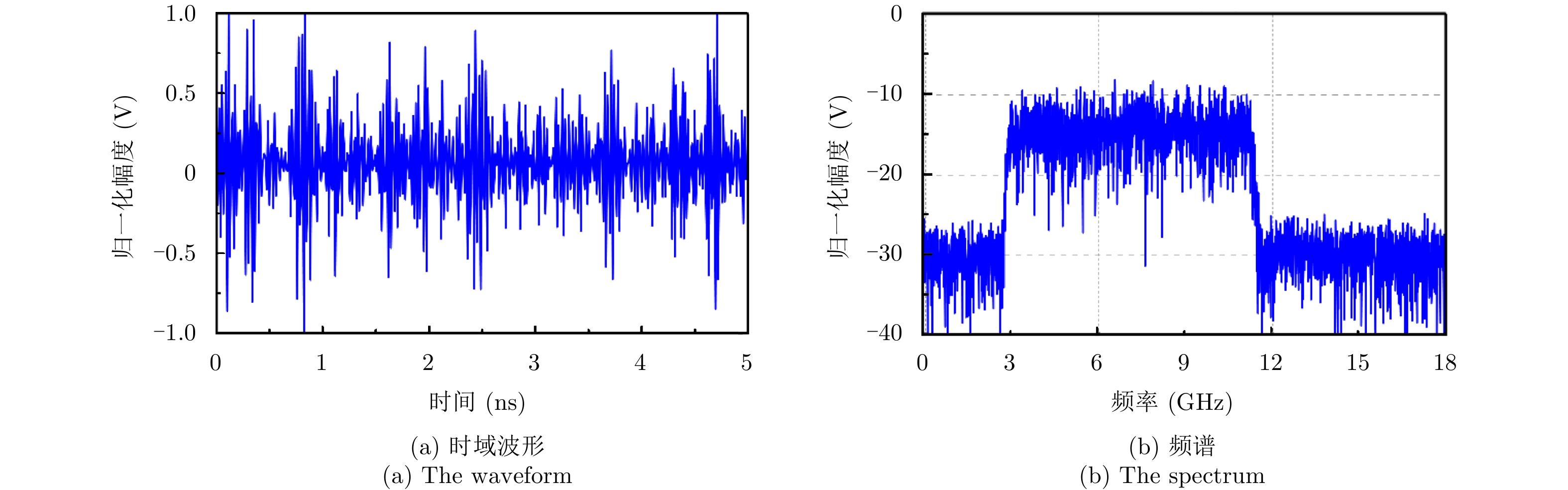
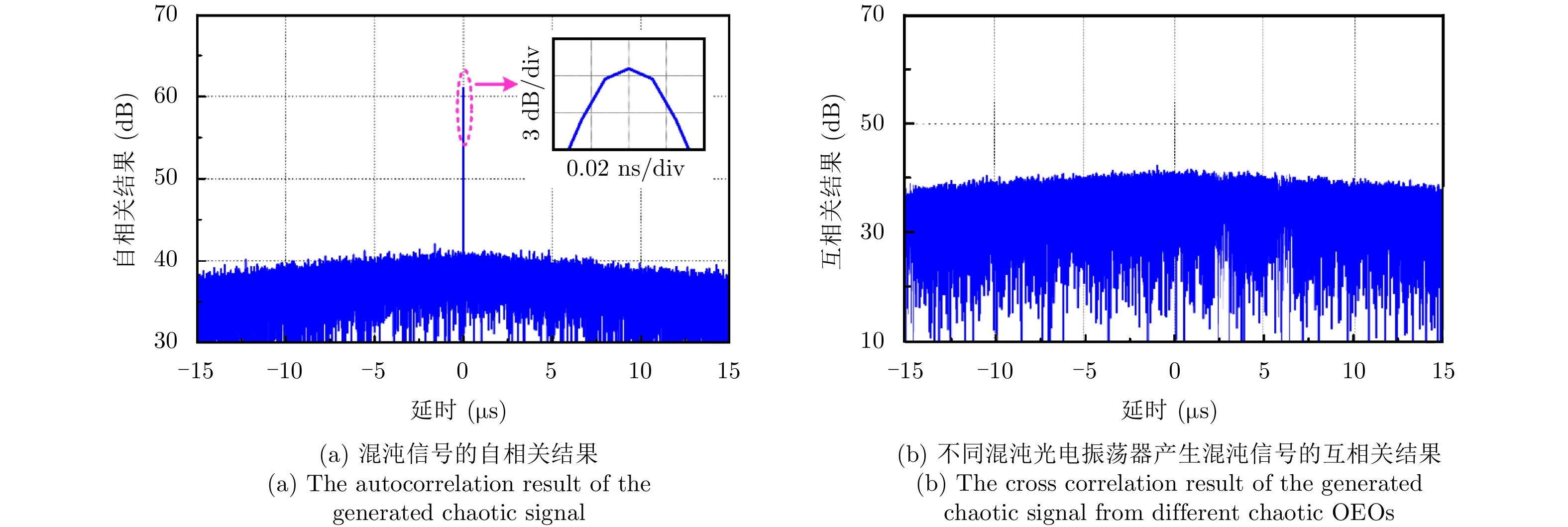
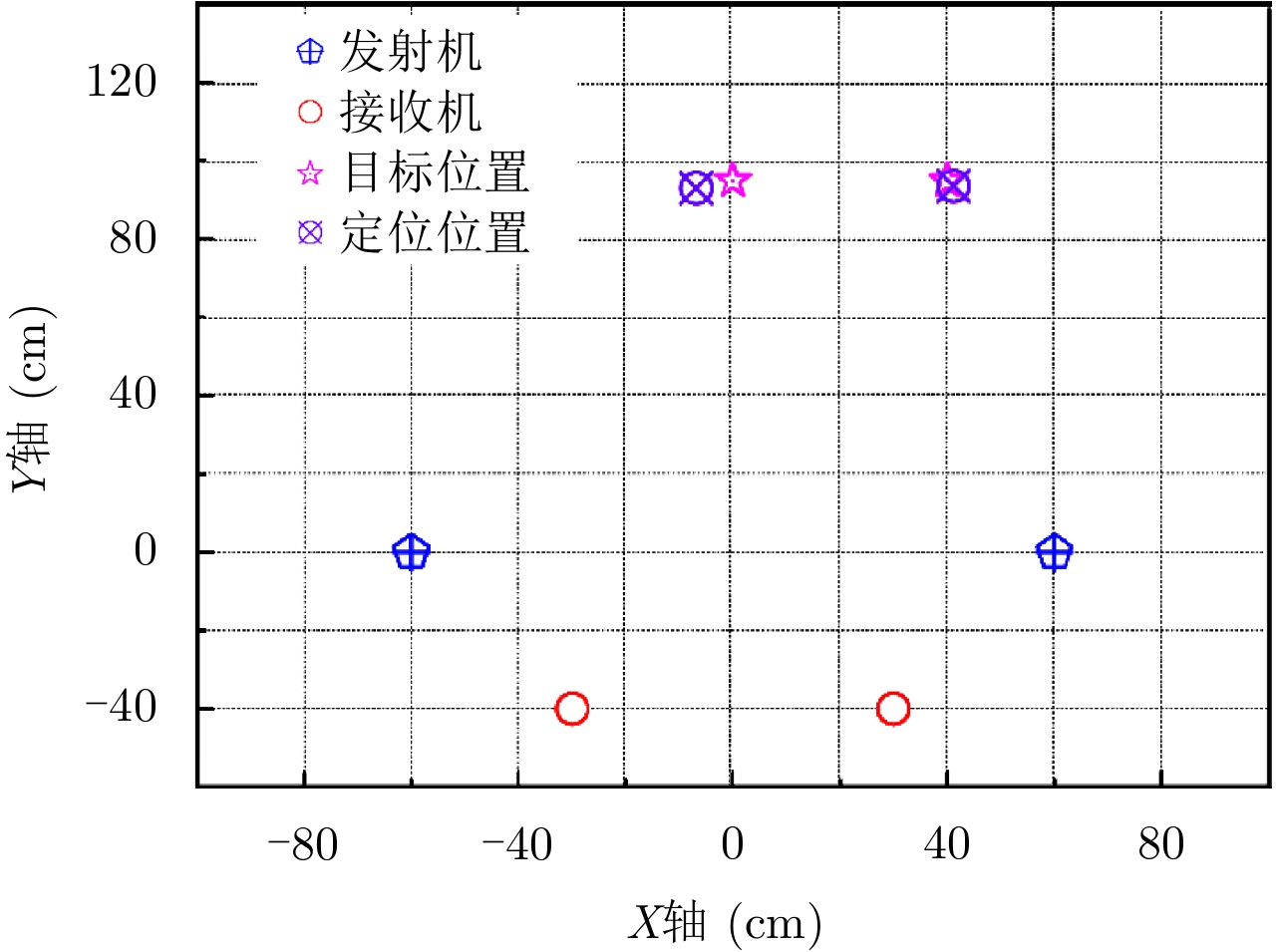
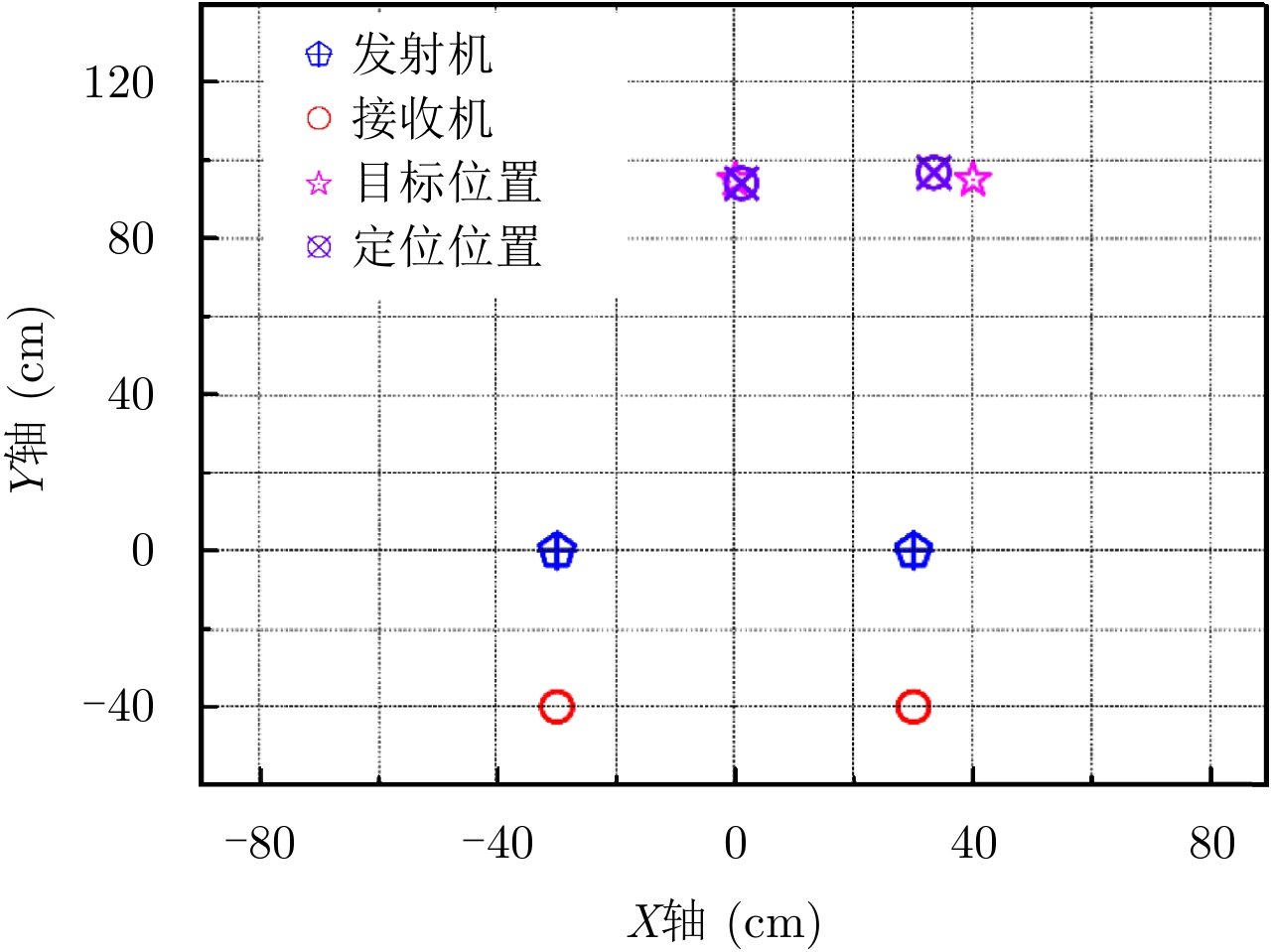
该文研究了基于光波分复用网络的分布式多目标定位系统,引入混沌光电振荡器实现宽带正交波形产生,引入光波分复用网络将分布式发射和接收单元的宽带信号传输回中心站进行信号处理,基于TOA (Time Of Arrival, 到达时间)定位方法实现对多目标的精确定位。多个光载波在中心站产生,中心站的资源可支撑复杂的高精度目标定位算法,远端发射和接收单元结构简单。进行了原理验证实验,构建了2个发射机、2个接收机的实验定位系统,基于混沌光电振荡器产生了频率范围为3.1~10.6 GHz的正交混沌波形。实现了对2个目标的2维定位,最大误差为7.09 cm,并对系统架构的可重构性进行了实验验证。 该文研究了基于光波分复用网络的分布式多目标定位系统,引入混沌光电振荡器实现宽带正交波形产生,引入光波分复用网络将分布式发射和接收单元的宽带信号传输回中心站进行信号处理,基于TOA (Time Of Arrival, 到达时间)定位方法实现对多目标的精确定位。多个光载波在中心站产生,中心站的资源可支撑复杂的高精度目标定位算法,远端发射和接收单元结构简单。进行了原理验证实验,构建了2个发射机、2个接收机的实验定位系统,基于混沌光电振荡器产生了频率范围为3.1~10.6 GHz的正交混沌波形。实现了对2个目标的2维定位,最大误差为7.09 cm,并对系统架构的可重构性进行了实验验证。
该文研究了基于光波分复用网络的分布式多目标定位系统,引入混沌光电振荡器实现宽带正交波形产生,引入光波分复用网络将分布式发射和接收单元的宽带信号传输回中心站进行信号处理,基于TOA (Time Of Arrival, 到达时间)定位方法实现对多目标的精确定位。多个光载波在中心站产生,中心站的资源可支撑复杂的高精度目标定位算法,远端发射和接收单元结构简单。进行了原理验证实验,构建了2个发射机、2个接收机的实验定位系统,基于混沌光电振荡器产生了频率范围为3.1~10.6 GHz的正交混沌波形。实现了对2个目标的2维定位,最大误差为7.09 cm,并对系统架构的可重构性进行了实验验证。 该文研究了基于光波分复用网络的分布式多目标定位系统,引入混沌光电振荡器实现宽带正交波形产生,引入光波分复用网络将分布式发射和接收单元的宽带信号传输回中心站进行信号处理,基于TOA (Time Of Arrival, 到达时间)定位方法实现对多目标的精确定位。多个光载波在中心站产生,中心站的资源可支撑复杂的高精度目标定位算法,远端发射和接收单元结构简单。进行了原理验证实验,构建了2个发射机、2个接收机的实验定位系统,基于混沌光电振荡器产生了频率范围为3.1~10.6 GHz的正交混沌波形。实现了对2个目标的2维定位,最大误差为7.09 cm,并对系统架构的可重构性进行了实验验证。


2019, 8(2): 178-188.
摘要:
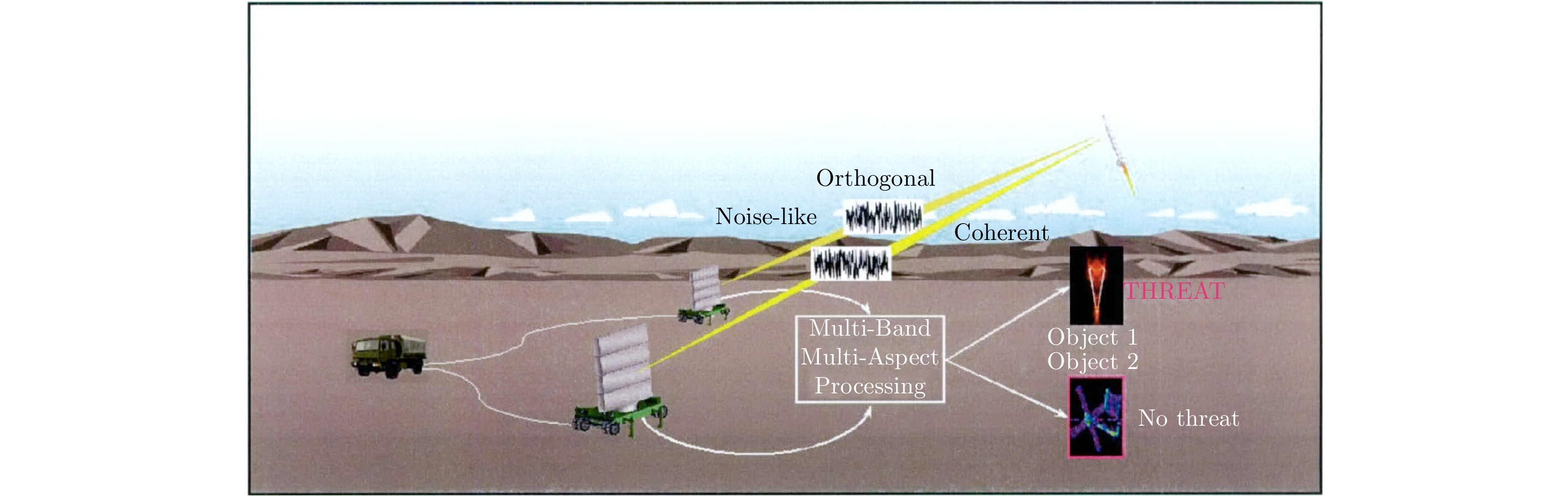
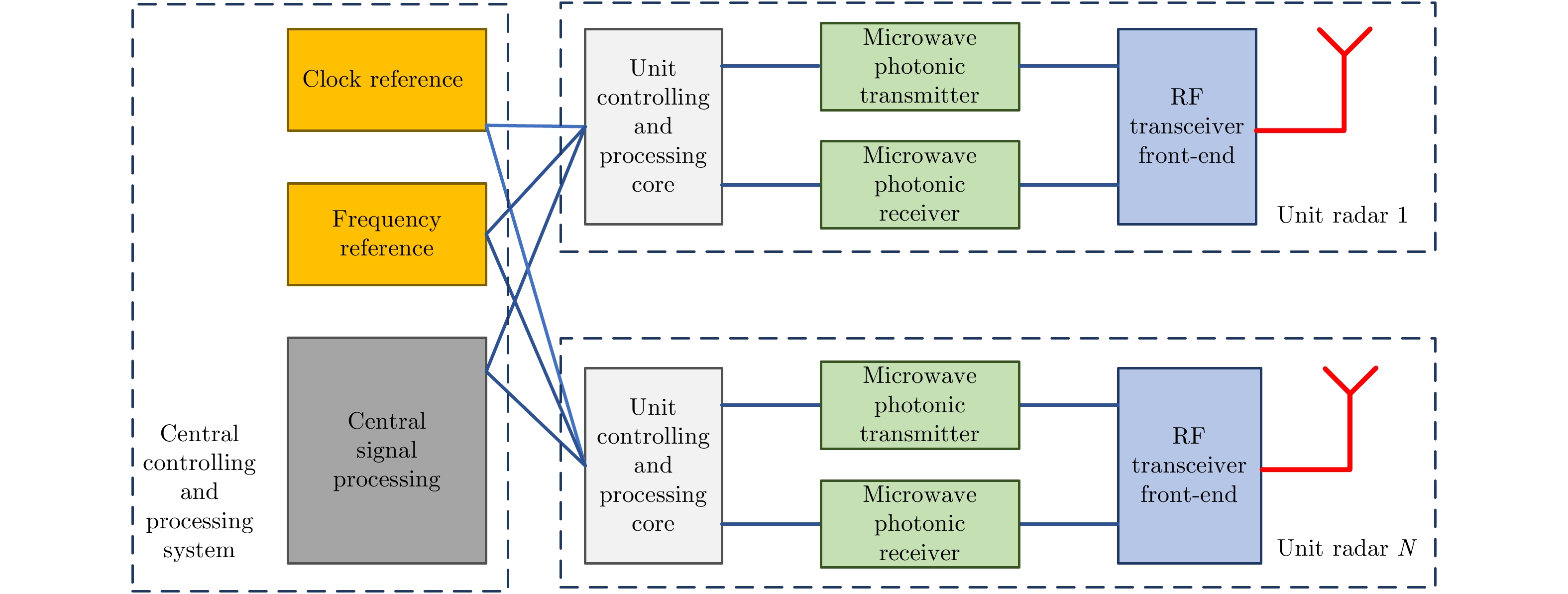
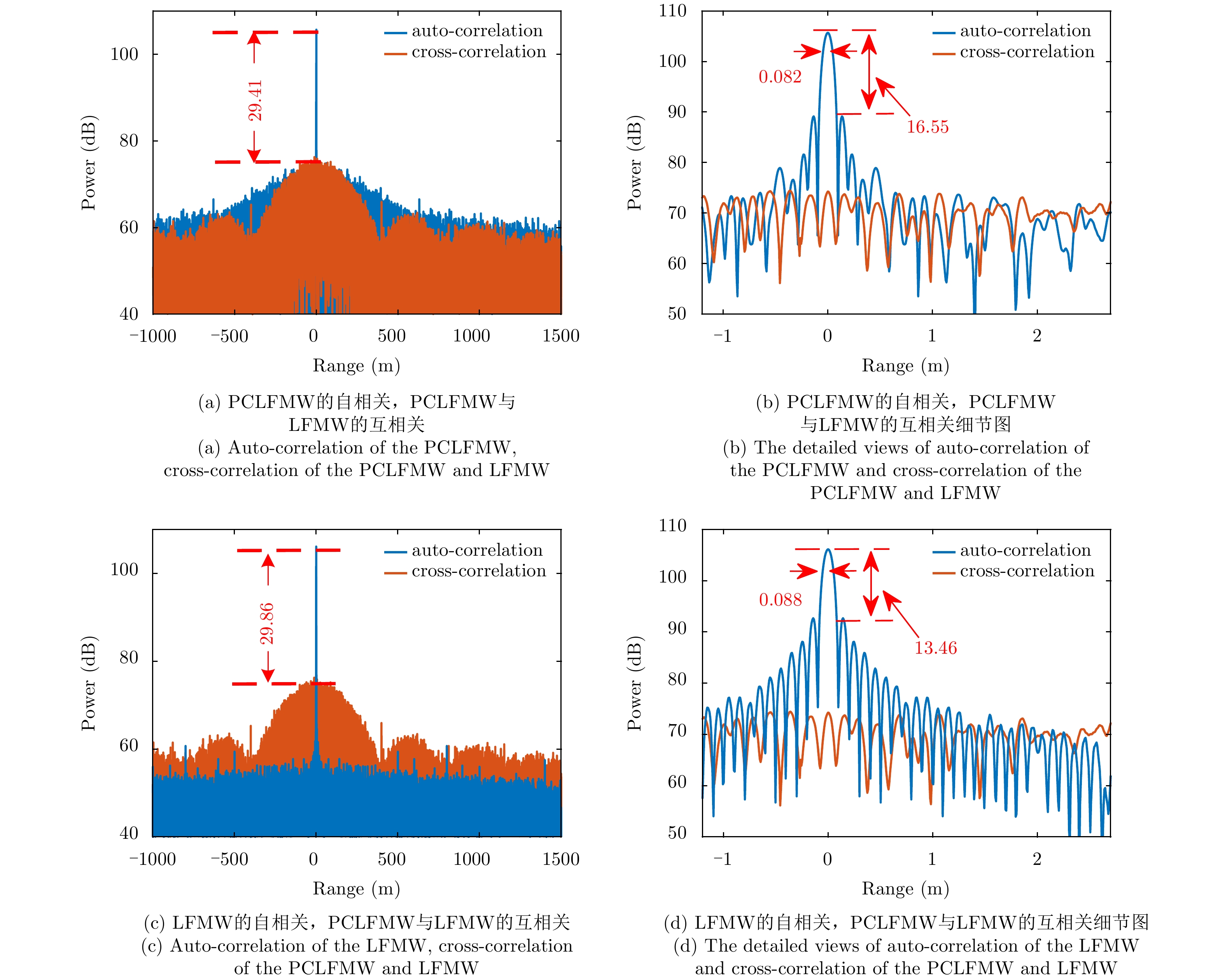
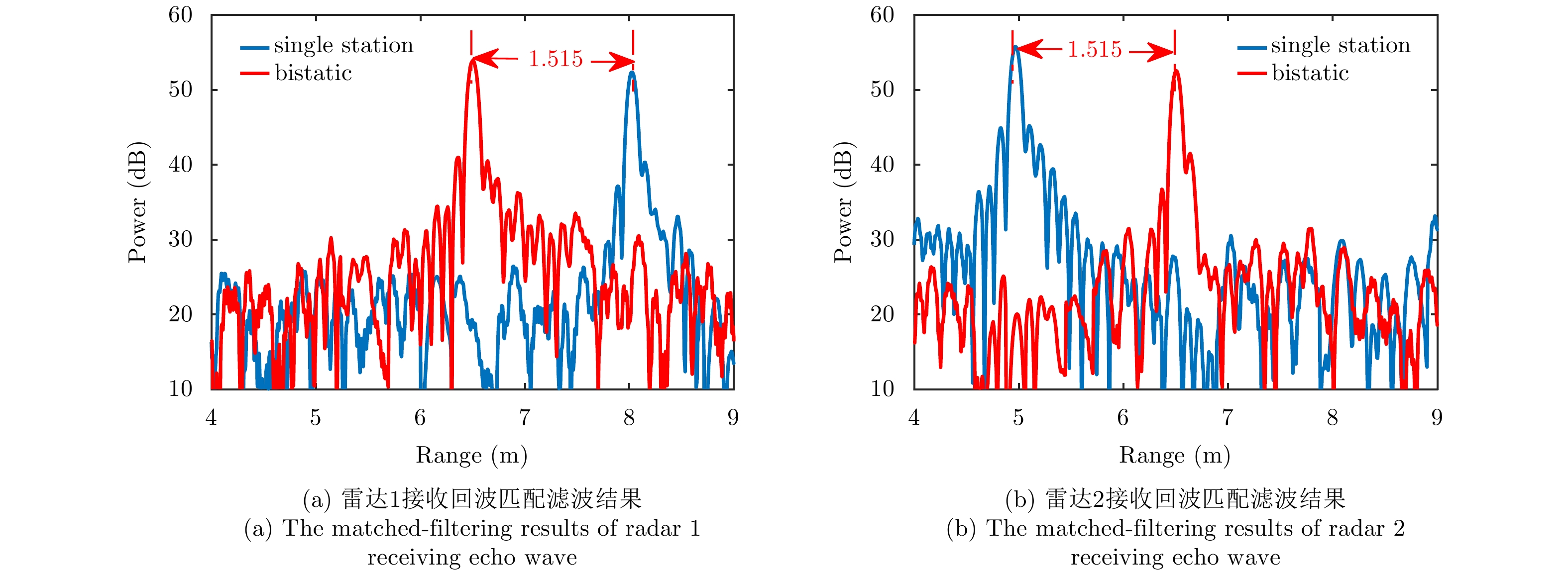
分布式相参孔径雷达(DCAR)是利用多个空间分离的天线孔径,向同一区域辐射信号,实现空间电磁波相参合成的雷达系统,具有系统灵活、探测分辨力高、威力大、成本低等优势。结合微波光子技术在宽带信号产生、传输、处理等多方面的优势,可以使DCAR的性能得以充分发挥。该文介绍了清华大学在基于微波光子原理的高分辨DCAR方面的成果,借助微波光子技术,在接收相参模式下,产生了8.5~11.5 GHz, 0.5 Gbps编码速率的宽带正交调相线性调频波,距离分辨率优于0.05 m、正交性接近30 dB。在全相参模式下,发射波形可灵活切换为宽带相参线性调频波,实现全相参合成。系统产生的波形能满足DCAR各个工作模式的波形需求。实验中,在两部雷达的参与下,通过全相参合成,获得了8.3 dB的信噪比增益。 分布式相参孔径雷达(DCAR)是利用多个空间分离的天线孔径,向同一区域辐射信号,实现空间电磁波相参合成的雷达系统,具有系统灵活、探测分辨力高、威力大、成本低等优势。结合微波光子技术在宽带信号产生、传输、处理等多方面的优势,可以使DCAR的性能得以充分发挥。该文介绍了清华大学在基于微波光子原理的高分辨DCAR方面的成果,借助微波光子技术,在接收相参模式下,产生了8.5~11.5 GHz, 0.5 Gbps编码速率的宽带正交调相线性调频波,距离分辨率优于0.05 m、正交性接近30 dB。在全相参模式下,发射波形可灵活切换为宽带相参线性调频波,实现全相参合成。系统产生的波形能满足DCAR各个工作模式的波形需求。实验中,在两部雷达的参与下,通过全相参合成,获得了8.3 dB的信噪比增益。
分布式相参孔径雷达(DCAR)是利用多个空间分离的天线孔径,向同一区域辐射信号,实现空间电磁波相参合成的雷达系统,具有系统灵活、探测分辨力高、威力大、成本低等优势。结合微波光子技术在宽带信号产生、传输、处理等多方面的优势,可以使DCAR的性能得以充分发挥。该文介绍了清华大学在基于微波光子原理的高分辨DCAR方面的成果,借助微波光子技术,在接收相参模式下,产生了8.5~11.5 GHz, 0.5 Gbps编码速率的宽带正交调相线性调频波,距离分辨率优于0.05 m、正交性接近30 dB。在全相参模式下,发射波形可灵活切换为宽带相参线性调频波,实现全相参合成。系统产生的波形能满足DCAR各个工作模式的波形需求。实验中,在两部雷达的参与下,通过全相参合成,获得了8.3 dB的信噪比增益。 分布式相参孔径雷达(DCAR)是利用多个空间分离的天线孔径,向同一区域辐射信号,实现空间电磁波相参合成的雷达系统,具有系统灵活、探测分辨力高、威力大、成本低等优势。结合微波光子技术在宽带信号产生、传输、处理等多方面的优势,可以使DCAR的性能得以充分发挥。该文介绍了清华大学在基于微波光子原理的高分辨DCAR方面的成果,借助微波光子技术,在接收相参模式下,产生了8.5~11.5 GHz, 0.5 Gbps编码速率的宽带正交调相线性调频波,距离分辨率优于0.05 m、正交性接近30 dB。在全相参模式下,发射波形可灵活切换为宽带相参线性调频波,实现全相参合成。系统产生的波形能满足DCAR各个工作模式的波形需求。实验中,在两部雷达的参与下,通过全相参合成,获得了8.3 dB的信噪比增益。




2019, 8(2): 189-196.
摘要:
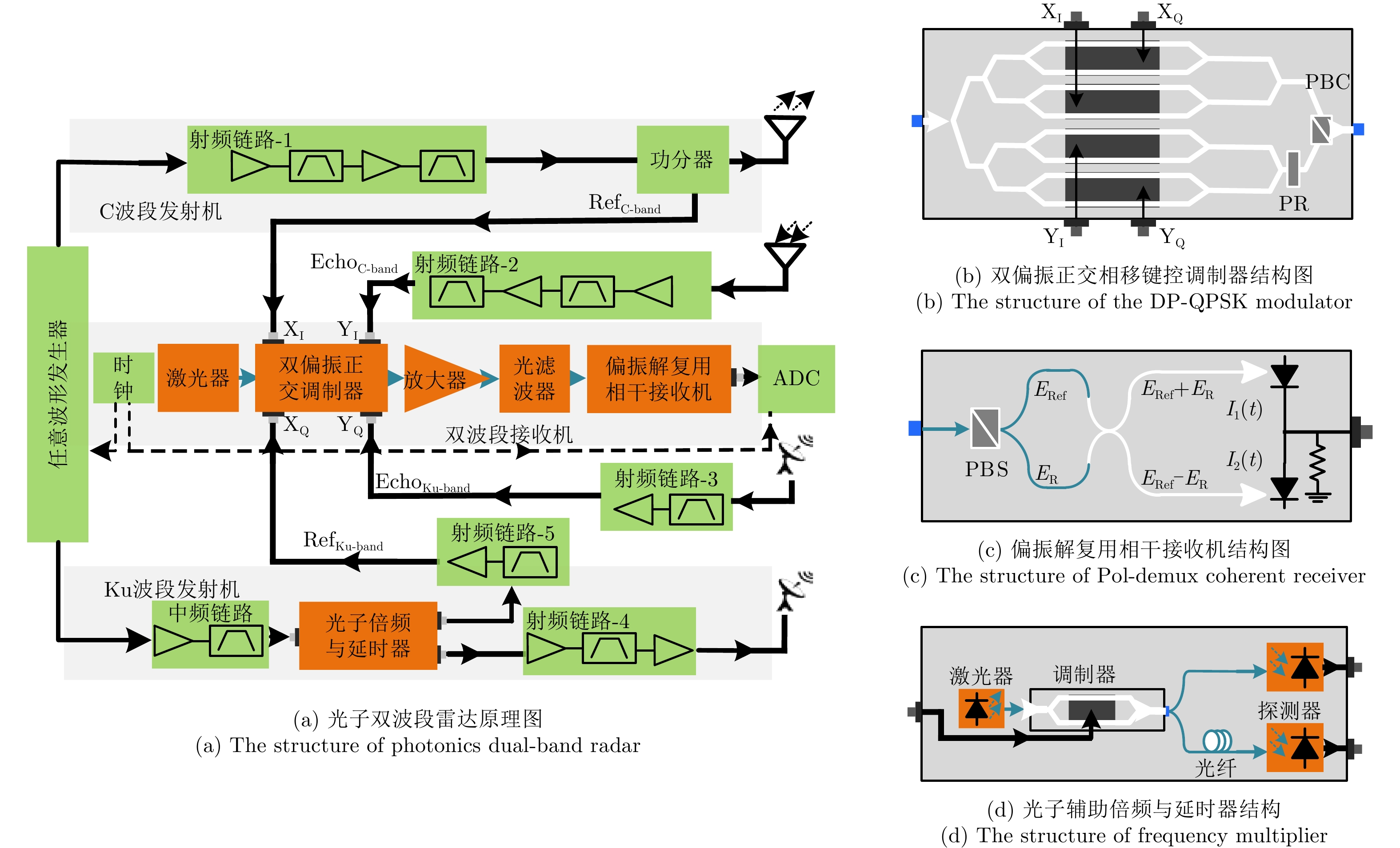
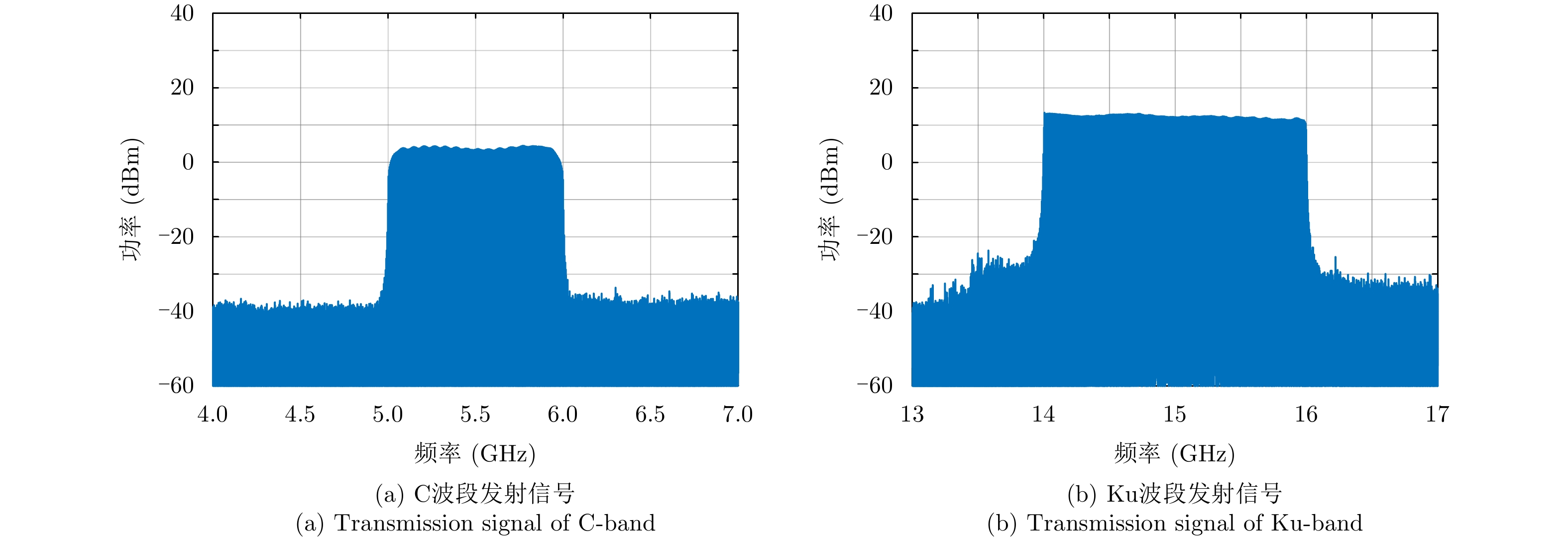
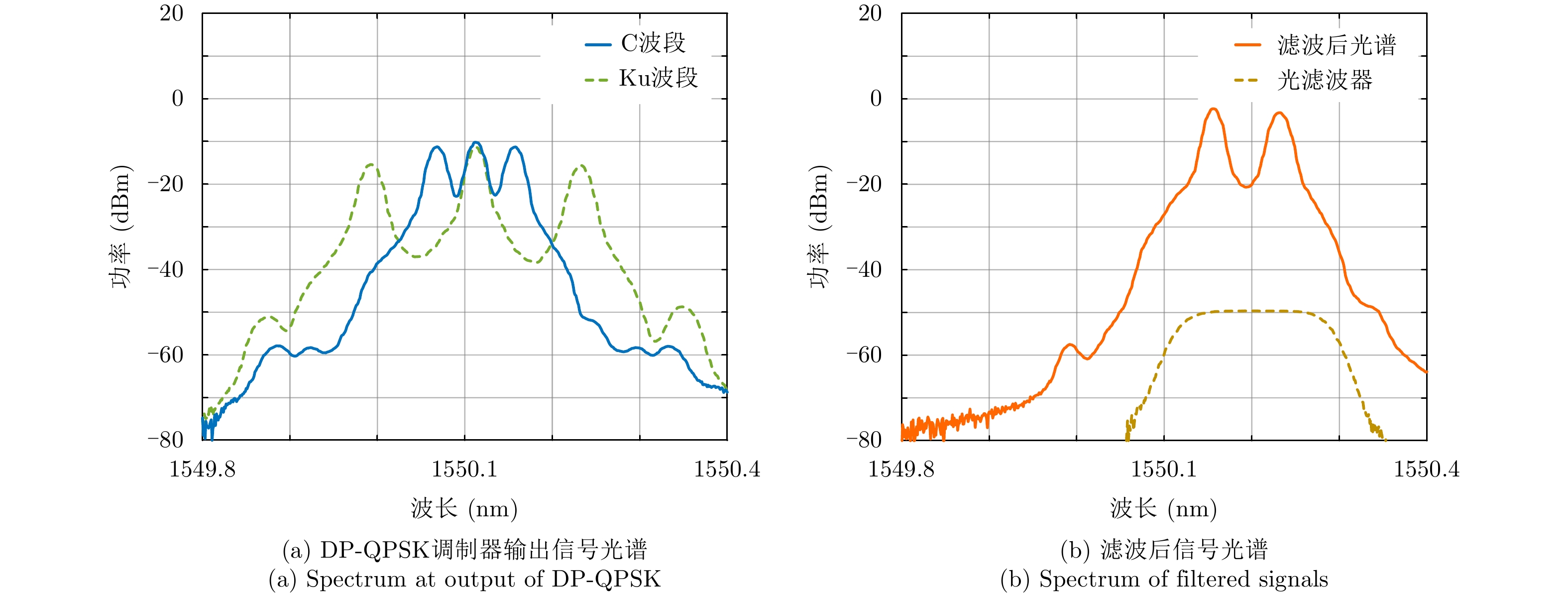
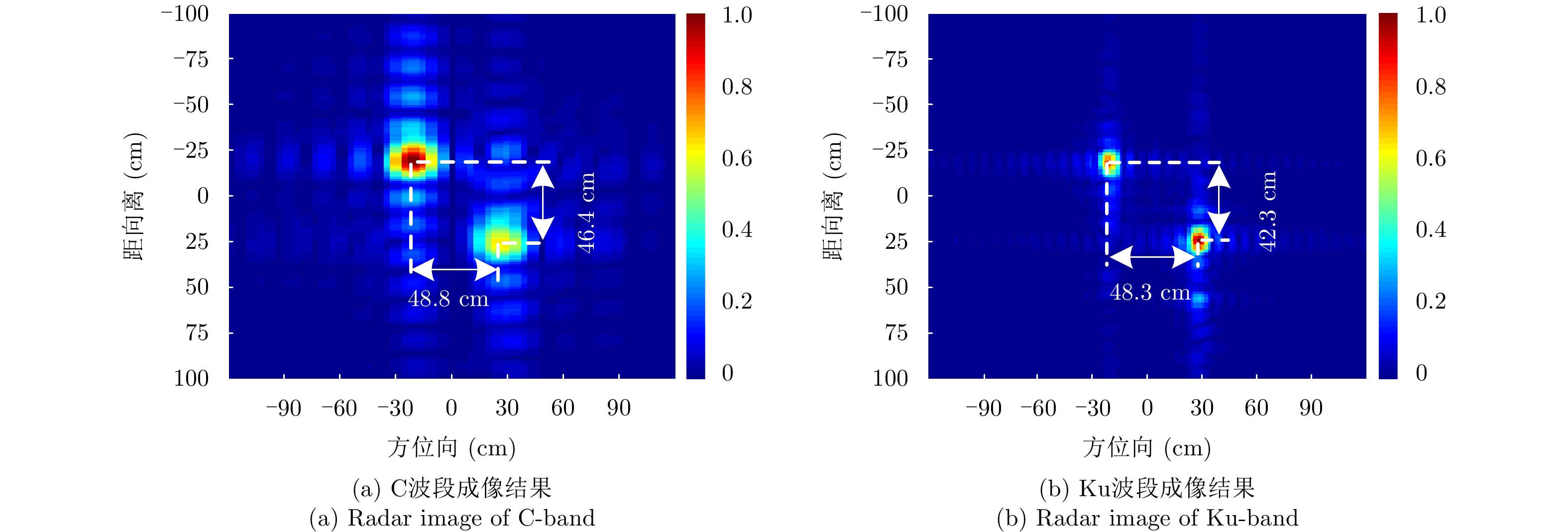
该文提出一种基于光子辅助去调频接收技术的双波段线性调频连续波雷达方案,该双波段雷达接收机基于平行架构光子混频器,能够利用同一套硬件设备同时接收双波段雷达的回波信号。接收机中使用一个双偏振正交相移键控(DP-QPSK)调制器,工作中将双波段雷达的两组参考信号和回波信号通过DP-QPSK调制器调制到正交偏振的光载波上,调制后的双带光回波和参考信号经过放大和滤波后,输入到偏振解复用相干接收机中进行光子辅助去调频处理。在发射机端,对于具有更高频率和带宽的发射信号,采用包含延时功能的光子倍频信号产生技术,产生参考信号与发射信号的同时,将发射信号延时,使得在接收机端对相同距离目标的双带回波信号去调频得到的中频信号可在频域分离。实验中通过逆合成孔径雷达成像实验评估了该双波段雷达系统的性能,该双波段雷达系统工作在C波段和Ku波段,发射信号带宽分别为1 GHz和2 GHz,接收机模拟-数字转换器的采样率为100 MSa/s。实验结果证明微波光子技术能为双波段线性调频连续波雷达提供有效的实现方案。 该文提出一种基于光子辅助去调频接收技术的双波段线性调频连续波雷达方案,该双波段雷达接收机基于平行架构光子混频器,能够利用同一套硬件设备同时接收双波段雷达的回波信号。接收机中使用一个双偏振正交相移键控(DP-QPSK)调制器,工作中将双波段雷达的两组参考信号和回波信号通过DP-QPSK调制器调制到正交偏振的光载波上,调制后的双带光回波和参考信号经过放大和滤波后,输入到偏振解复用相干接收机中进行光子辅助去调频处理。在发射机端,对于具有更高频率和带宽的发射信号,采用包含延时功能的光子倍频信号产生技术,产生参考信号与发射信号的同时,将发射信号延时,使得在接收机端对相同距离目标的双带回波信号去调频得到的中频信号可在频域分离。实验中通过逆合成孔径雷达成像实验评估了该双波段雷达系统的性能,该双波段雷达系统工作在C波段和Ku波段,发射信号带宽分别为1 GHz和2 GHz,接收机模拟-数字转换器的采样率为100 MSa/s。实验结果证明微波光子技术能为双波段线性调频连续波雷达提供有效的实现方案。
该文提出一种基于光子辅助去调频接收技术的双波段线性调频连续波雷达方案,该双波段雷达接收机基于平行架构光子混频器,能够利用同一套硬件设备同时接收双波段雷达的回波信号。接收机中使用一个双偏振正交相移键控(DP-QPSK)调制器,工作中将双波段雷达的两组参考信号和回波信号通过DP-QPSK调制器调制到正交偏振的光载波上,调制后的双带光回波和参考信号经过放大和滤波后,输入到偏振解复用相干接收机中进行光子辅助去调频处理。在发射机端,对于具有更高频率和带宽的发射信号,采用包含延时功能的光子倍频信号产生技术,产生参考信号与发射信号的同时,将发射信号延时,使得在接收机端对相同距离目标的双带回波信号去调频得到的中频信号可在频域分离。实验中通过逆合成孔径雷达成像实验评估了该双波段雷达系统的性能,该双波段雷达系统工作在C波段和Ku波段,发射信号带宽分别为1 GHz和2 GHz,接收机模拟-数字转换器的采样率为100 MSa/s。实验结果证明微波光子技术能为双波段线性调频连续波雷达提供有效的实现方案。 该文提出一种基于光子辅助去调频接收技术的双波段线性调频连续波雷达方案,该双波段雷达接收机基于平行架构光子混频器,能够利用同一套硬件设备同时接收双波段雷达的回波信号。接收机中使用一个双偏振正交相移键控(DP-QPSK)调制器,工作中将双波段雷达的两组参考信号和回波信号通过DP-QPSK调制器调制到正交偏振的光载波上,调制后的双带光回波和参考信号经过放大和滤波后,输入到偏振解复用相干接收机中进行光子辅助去调频处理。在发射机端,对于具有更高频率和带宽的发射信号,采用包含延时功能的光子倍频信号产生技术,产生参考信号与发射信号的同时,将发射信号延时,使得在接收机端对相同距离目标的双带回波信号去调频得到的中频信号可在频域分离。实验中通过逆合成孔径雷达成像实验评估了该双波段雷达系统的性能,该双波段雷达系统工作在C波段和Ku波段,发射信号带宽分别为1 GHz和2 GHz,接收机模拟-数字转换器的采样率为100 MSa/s。实验结果证明微波光子技术能为双波段线性调频连续波雷达提供有效的实现方案。

2019, 8(2): 197-204.
摘要:
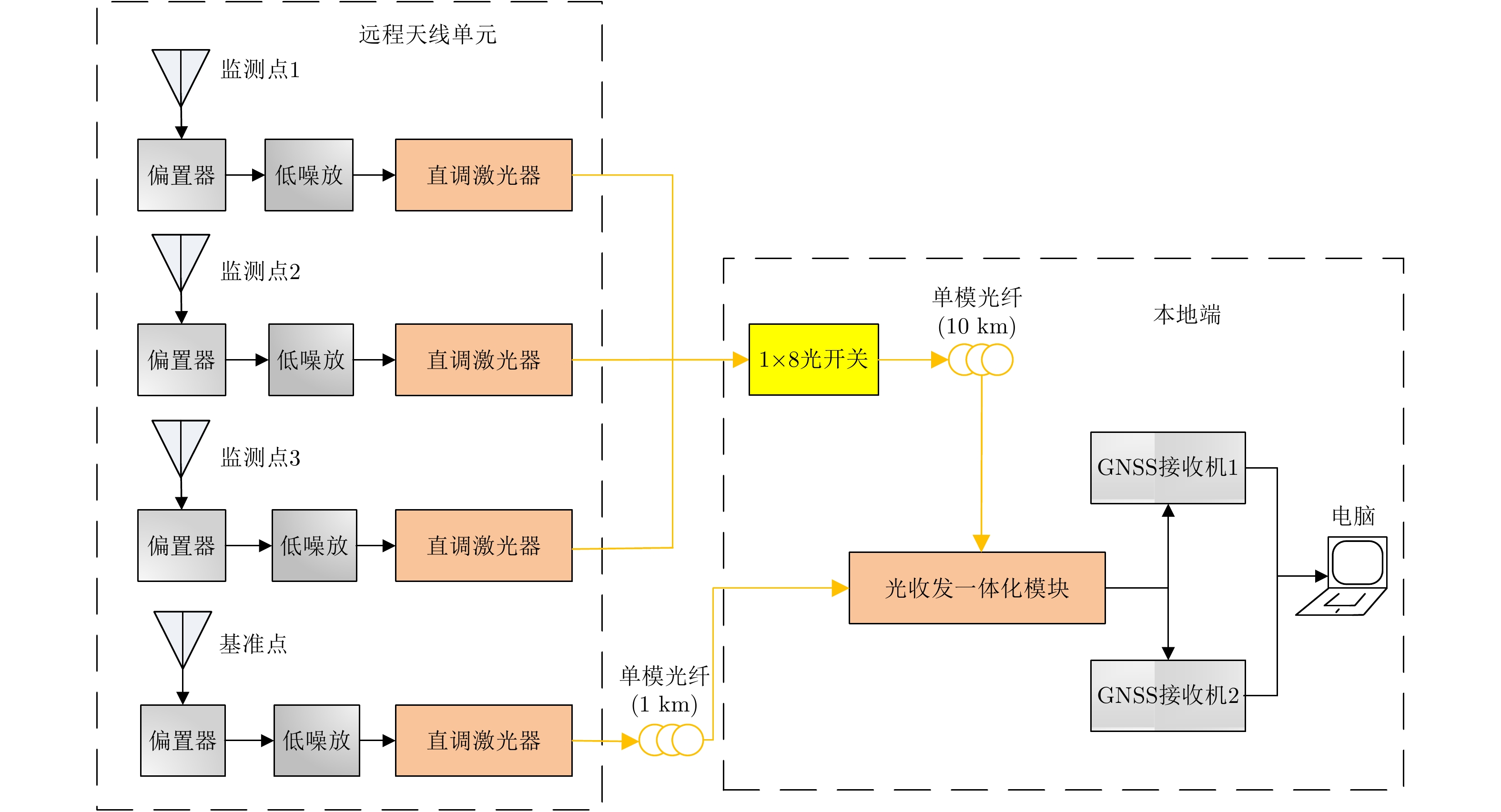
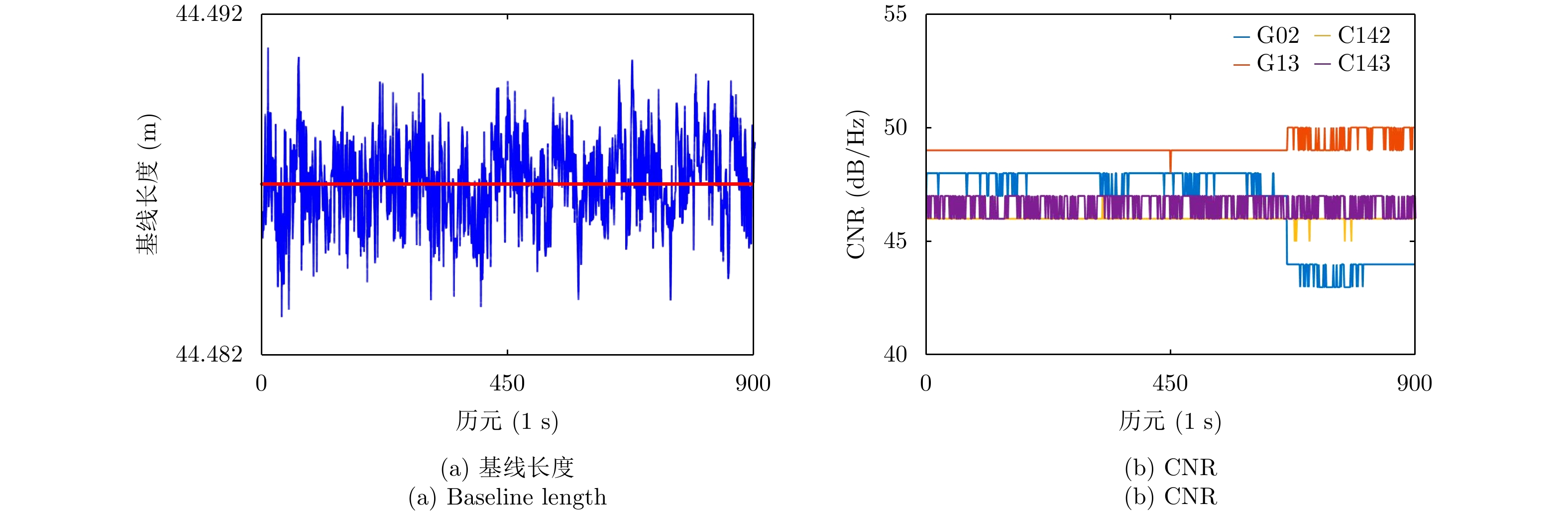
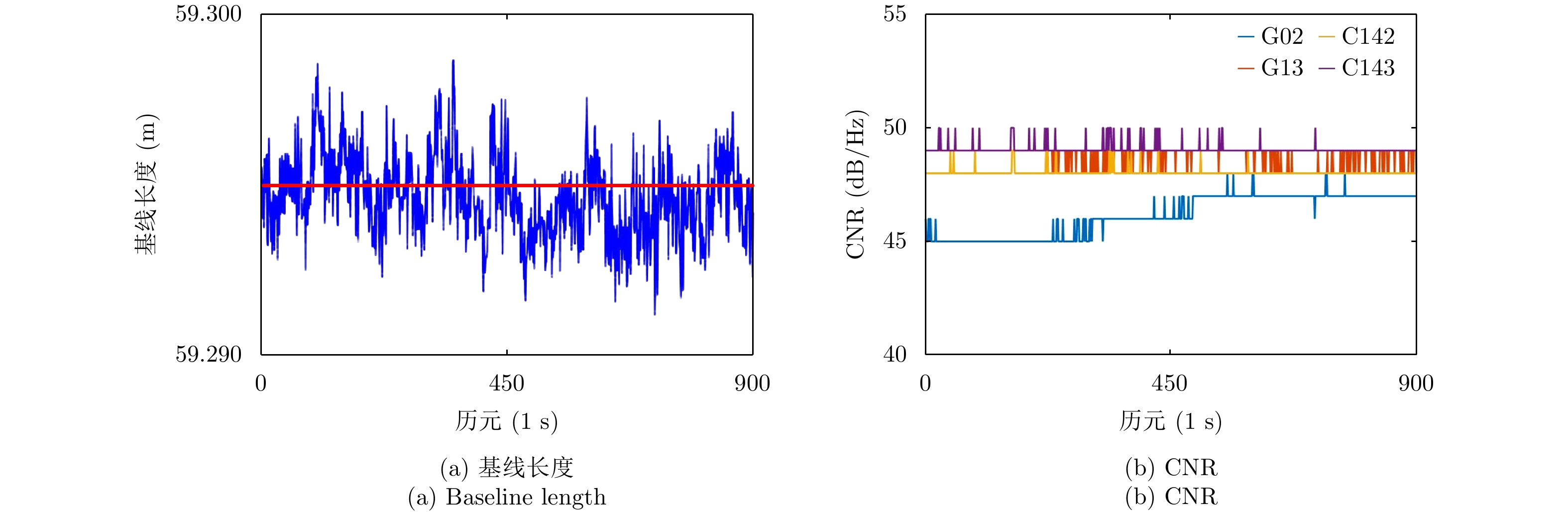
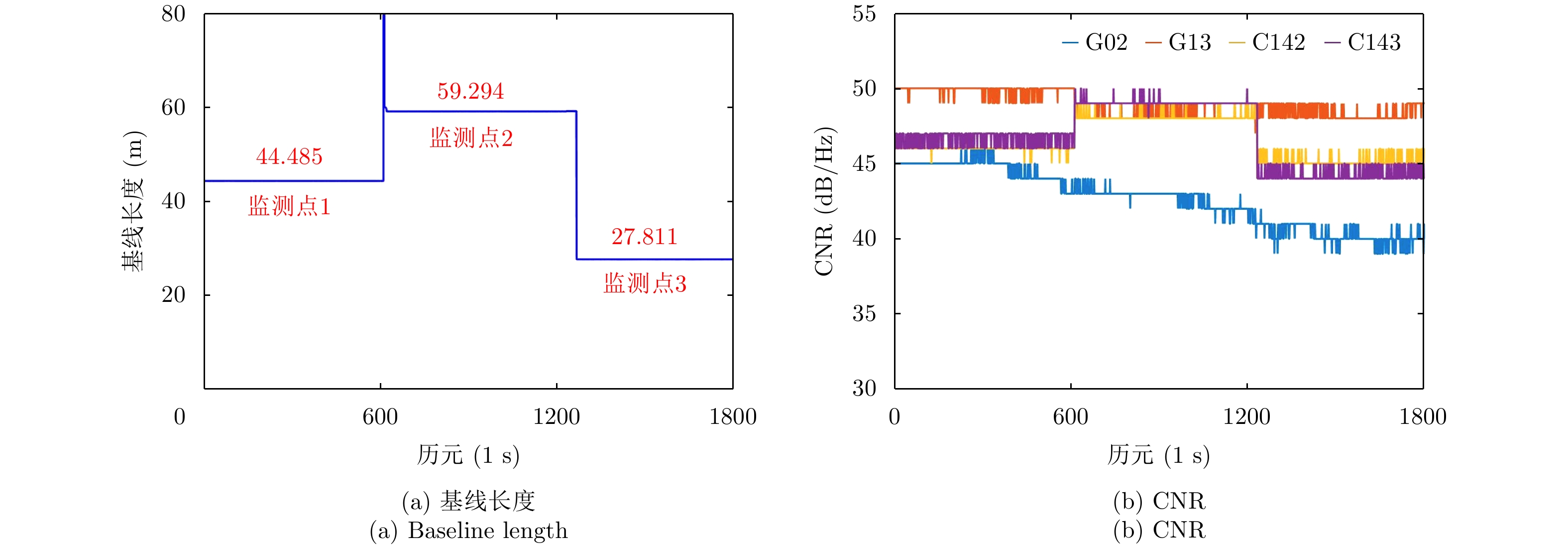
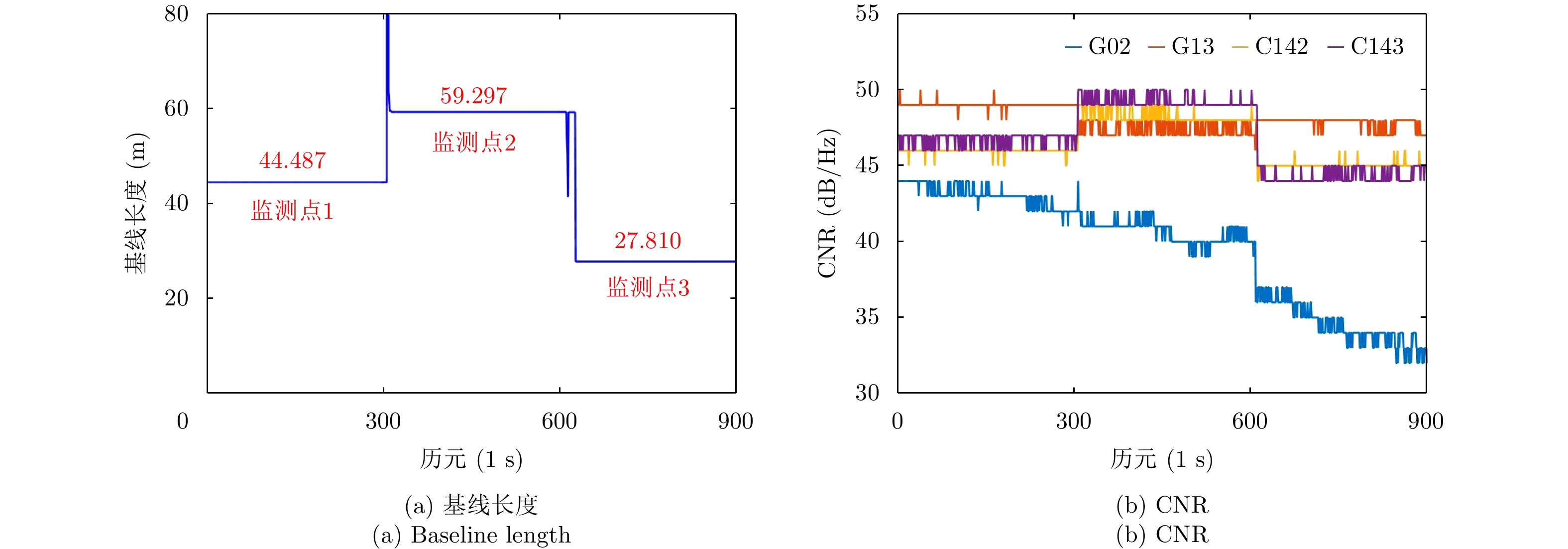
该文设计了一种光载一机多天线远程全球导航卫星系统(GNSS)差分监测系统。该系统利用微波光子链路远程采集多个远端天线接收的GNSS信号,并传输回本地端;然后在本地端借助高速光开关,以时分模式依次建立各远端信号与参考基准信号的载波相位双差模型方程,处理后实时获得高定位精度。实验中布设了10 km微波光子链路,3个远程监测点在E, N, U方向定位精度都达到毫米量级、实时响应时间低于10 ms。与传统一机单天线方案相比,该光载一机多天线GNSS差分监测系统在不降低定位精度的前提下,显著提升了监测/覆盖范围、实时监测/响应时间,以及大规模监测的性价比。因此,该系统在大型土建工程、自然环境大规模监测具有重要应用价值。 该文设计了一种光载一机多天线远程全球导航卫星系统(GNSS)差分监测系统。该系统利用微波光子链路远程采集多个远端天线接收的GNSS信号,并传输回本地端;然后在本地端借助高速光开关,以时分模式依次建立各远端信号与参考基准信号的载波相位双差模型方程,处理后实时获得高定位精度。实验中布设了10 km微波光子链路,3个远程监测点在E, N, U方向定位精度都达到毫米量级、实时响应时间低于10 ms。与传统一机单天线方案相比,该光载一机多天线GNSS差分监测系统在不降低定位精度的前提下,显著提升了监测/覆盖范围、实时监测/响应时间,以及大规模监测的性价比。因此,该系统在大型土建工程、自然环境大规模监测具有重要应用价值。
该文设计了一种光载一机多天线远程全球导航卫星系统(GNSS)差分监测系统。该系统利用微波光子链路远程采集多个远端天线接收的GNSS信号,并传输回本地端;然后在本地端借助高速光开关,以时分模式依次建立各远端信号与参考基准信号的载波相位双差模型方程,处理后实时获得高定位精度。实验中布设了10 km微波光子链路,3个远程监测点在E, N, U方向定位精度都达到毫米量级、实时响应时间低于10 ms。与传统一机单天线方案相比,该光载一机多天线GNSS差分监测系统在不降低定位精度的前提下,显著提升了监测/覆盖范围、实时监测/响应时间,以及大规模监测的性价比。因此,该系统在大型土建工程、自然环境大规模监测具有重要应用价值。 该文设计了一种光载一机多天线远程全球导航卫星系统(GNSS)差分监测系统。该系统利用微波光子链路远程采集多个远端天线接收的GNSS信号,并传输回本地端;然后在本地端借助高速光开关,以时分模式依次建立各远端信号与参考基准信号的载波相位双差模型方程,处理后实时获得高定位精度。实验中布设了10 km微波光子链路,3个远程监测点在E, N, U方向定位精度都达到毫米量级、实时响应时间低于10 ms。与传统一机单天线方案相比,该光载一机多天线GNSS差分监测系统在不降低定位精度的前提下,显著提升了监测/覆盖范围、实时监测/响应时间,以及大规模监测的性价比。因此,该系统在大型土建工程、自然环境大规模监测具有重要应用价值。



2019, 8(2): 205-214.
摘要:
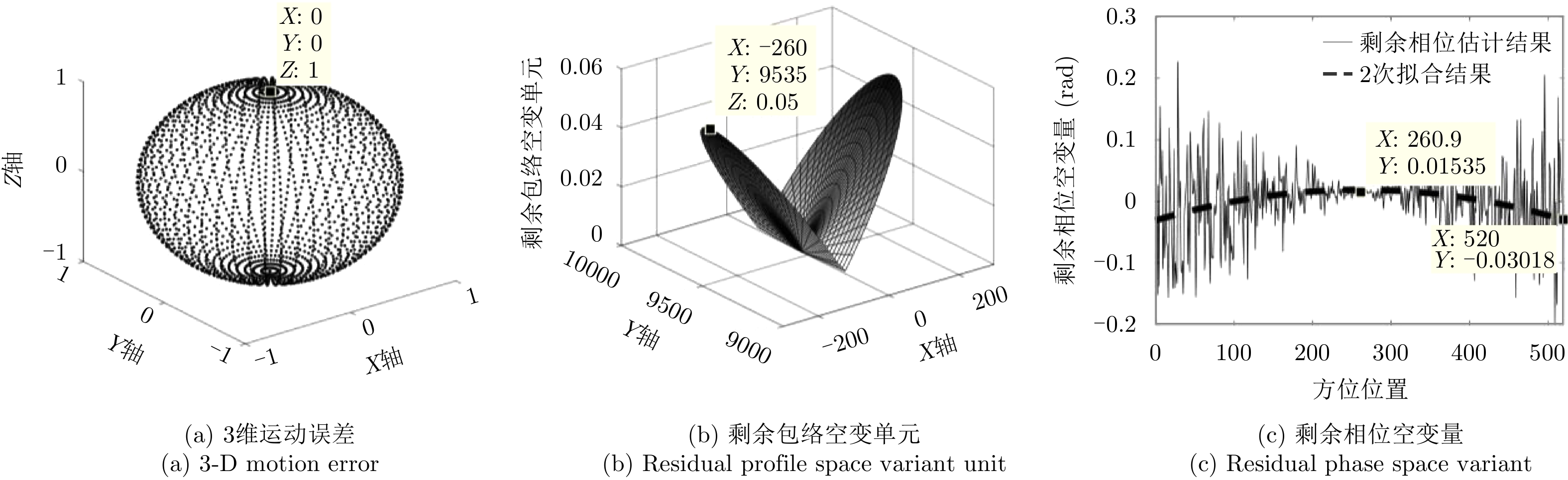
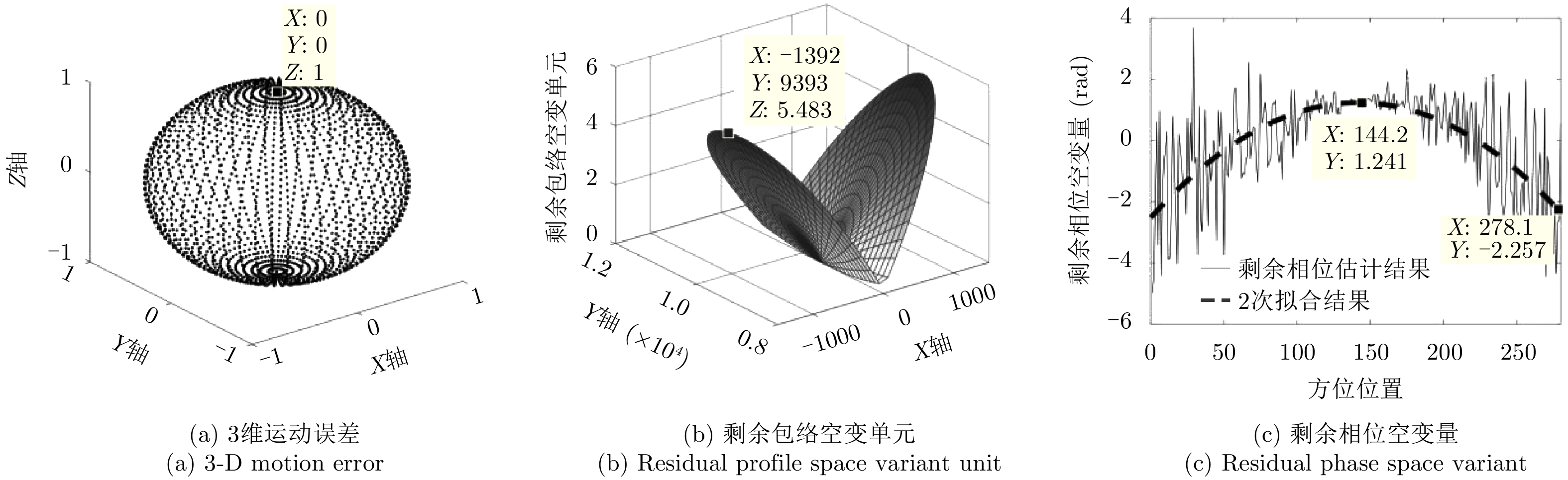
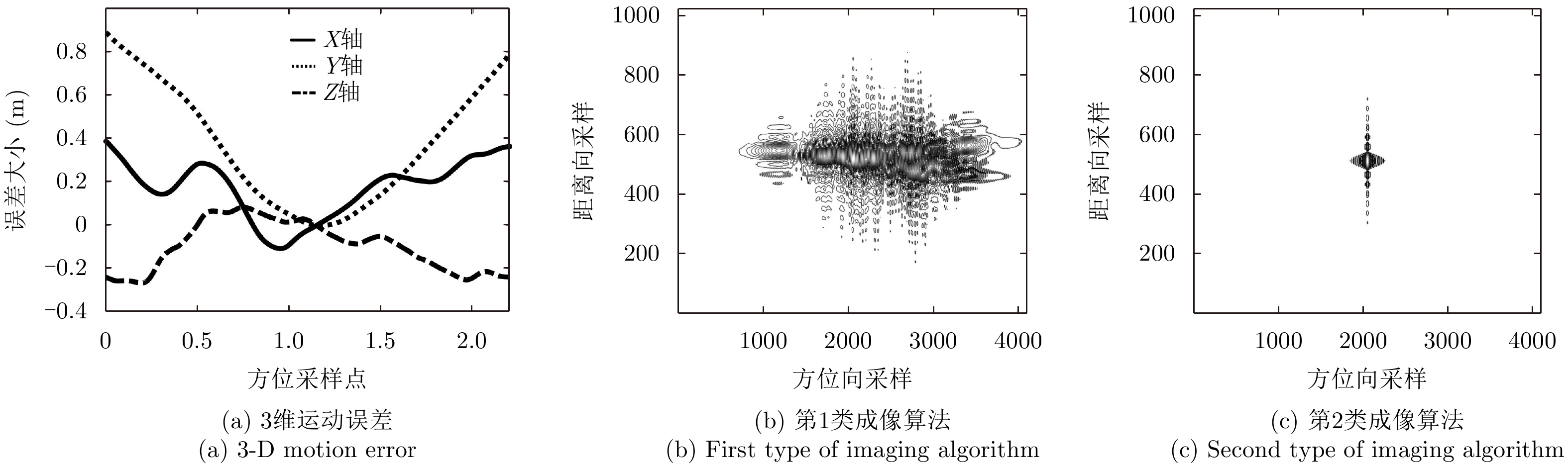
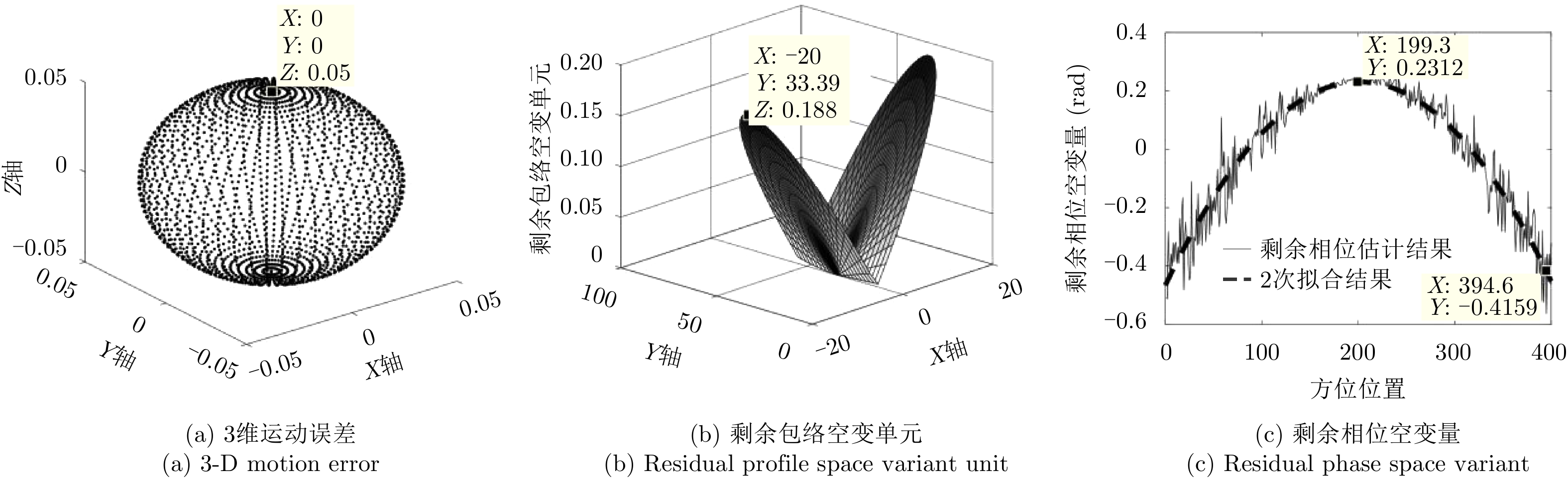
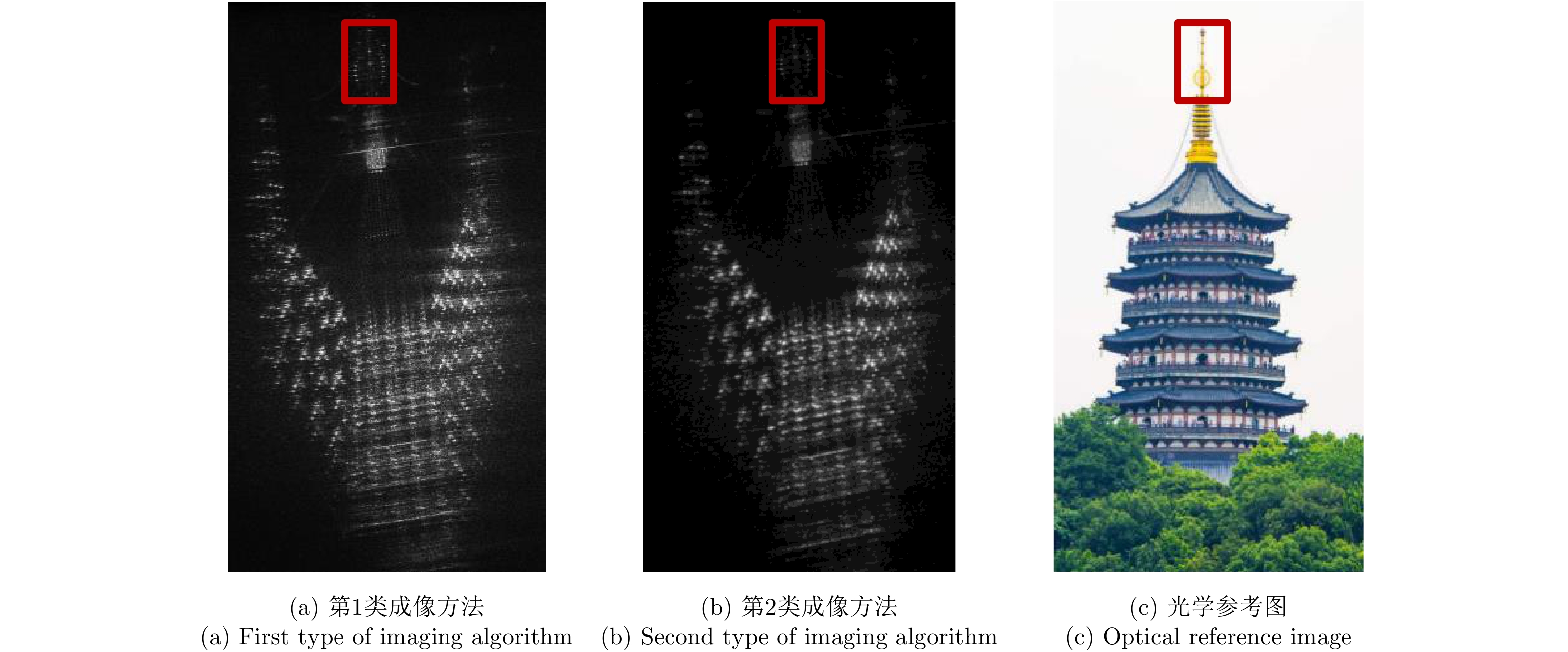
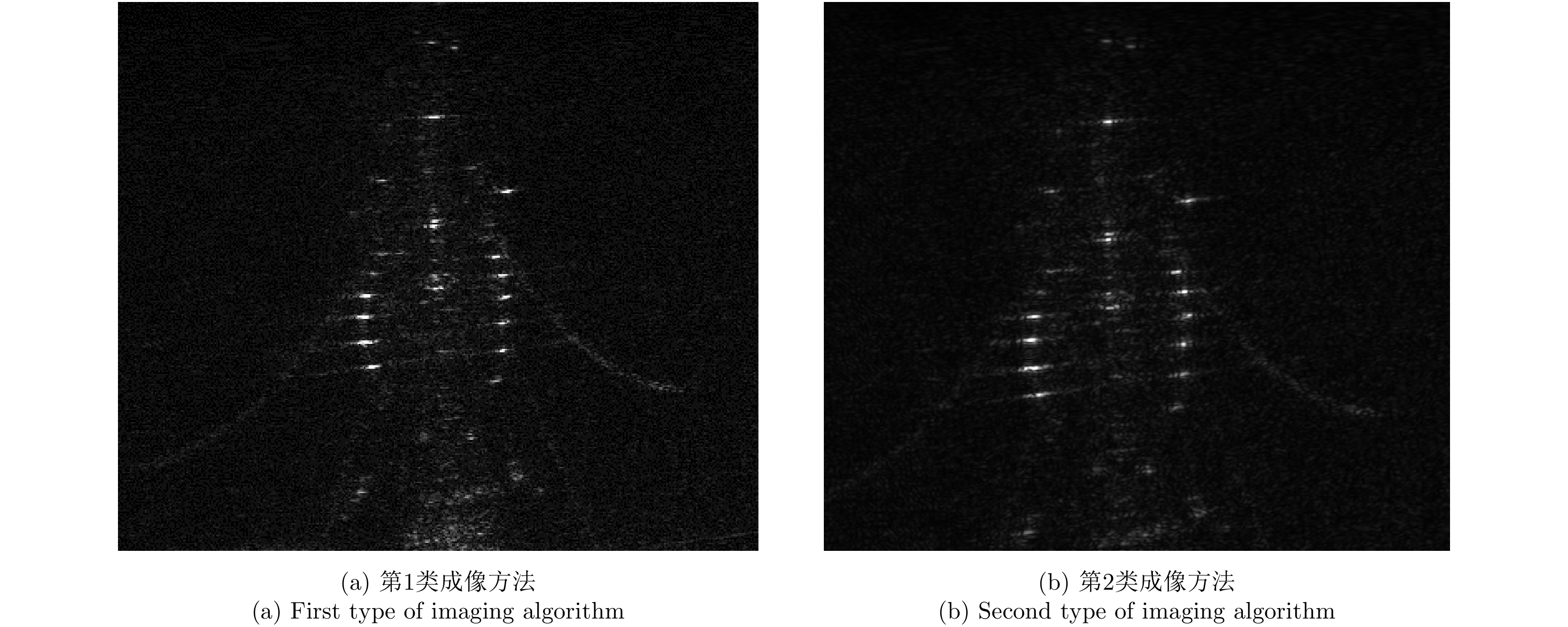
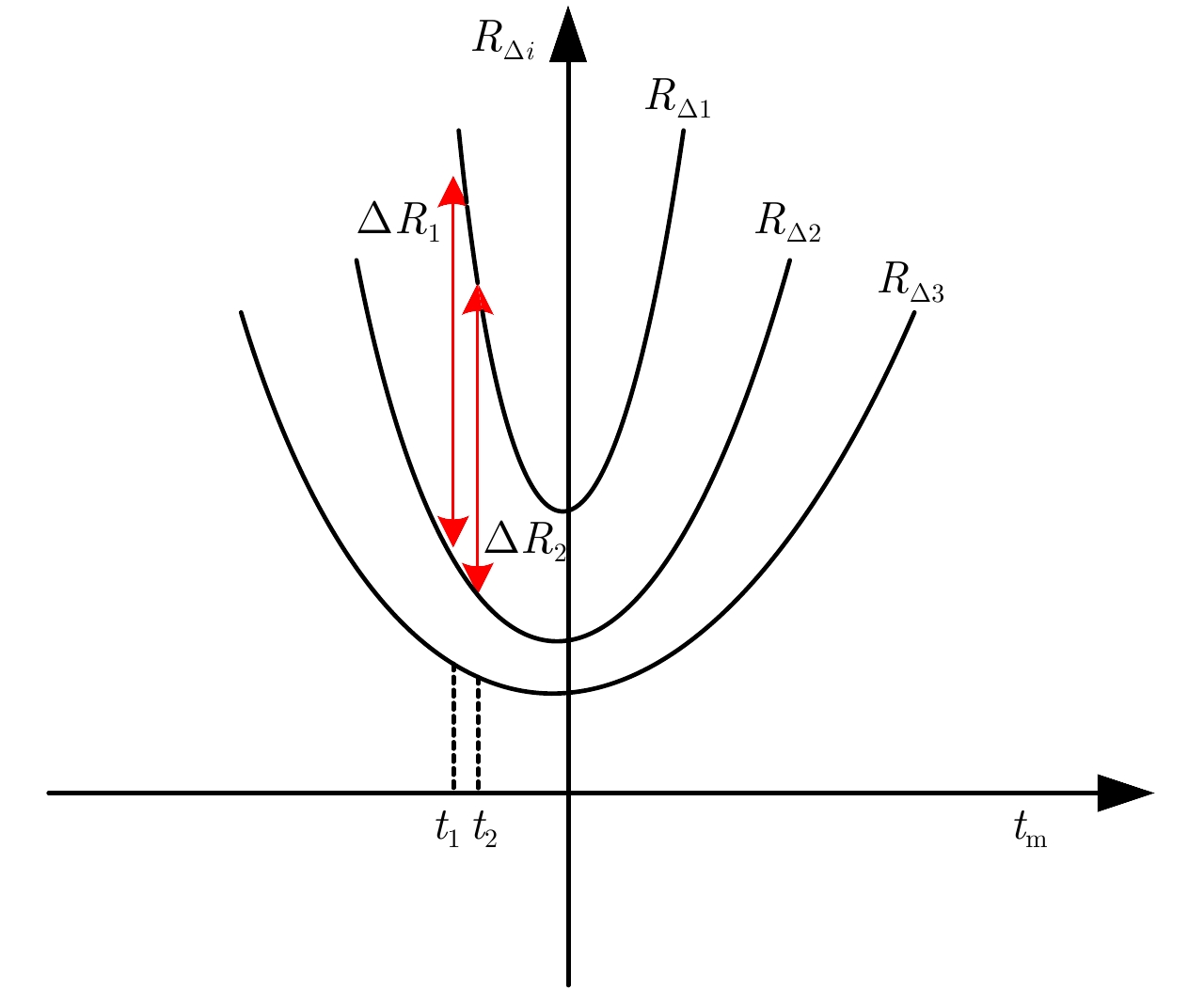
针对运动误差空变对实现微波光子雷达超高分辨SAR成像的影响,该文提出了一种基于空变运动误差分析的超高分辨成像方法。首先通过解析求解获得中心波束平面补偿下的剩余空变误差表达式,提出了运动误差空变影响判定准则。接着针对微波光子SAR系统条件的不同判定结果,提出相应的成像流程。最后对所提判定准则与成像方法进行点仿真验证,并对录取的车载10 GHz微波光子超高分辨SAR实测数据进行分析与成像处理,实验结果表明所提方法的有效性。 针对运动误差空变对实现微波光子雷达超高分辨SAR成像的影响,该文提出了一种基于空变运动误差分析的超高分辨成像方法。首先通过解析求解获得中心波束平面补偿下的剩余空变误差表达式,提出了运动误差空变影响判定准则。接着针对微波光子SAR系统条件的不同判定结果,提出相应的成像流程。最后对所提判定准则与成像方法进行点仿真验证,并对录取的车载10 GHz微波光子超高分辨SAR实测数据进行分析与成像处理,实验结果表明所提方法的有效性。
针对运动误差空变对实现微波光子雷达超高分辨SAR成像的影响,该文提出了一种基于空变运动误差分析的超高分辨成像方法。首先通过解析求解获得中心波束平面补偿下的剩余空变误差表达式,提出了运动误差空变影响判定准则。接着针对微波光子SAR系统条件的不同判定结果,提出相应的成像流程。最后对所提判定准则与成像方法进行点仿真验证,并对录取的车载10 GHz微波光子超高分辨SAR实测数据进行分析与成像处理,实验结果表明所提方法的有效性。 针对运动误差空变对实现微波光子雷达超高分辨SAR成像的影响,该文提出了一种基于空变运动误差分析的超高分辨成像方法。首先通过解析求解获得中心波束平面补偿下的剩余空变误差表达式,提出了运动误差空变影响判定准则。接着针对微波光子SAR系统条件的不同判定结果,提出相应的成像流程。最后对所提判定准则与成像方法进行点仿真验证,并对录取的车载10 GHz微波光子超高分辨SAR实测数据进行分析与成像处理,实验结果表明所提方法的有效性。



2019, 8(2): 215-223.
摘要:
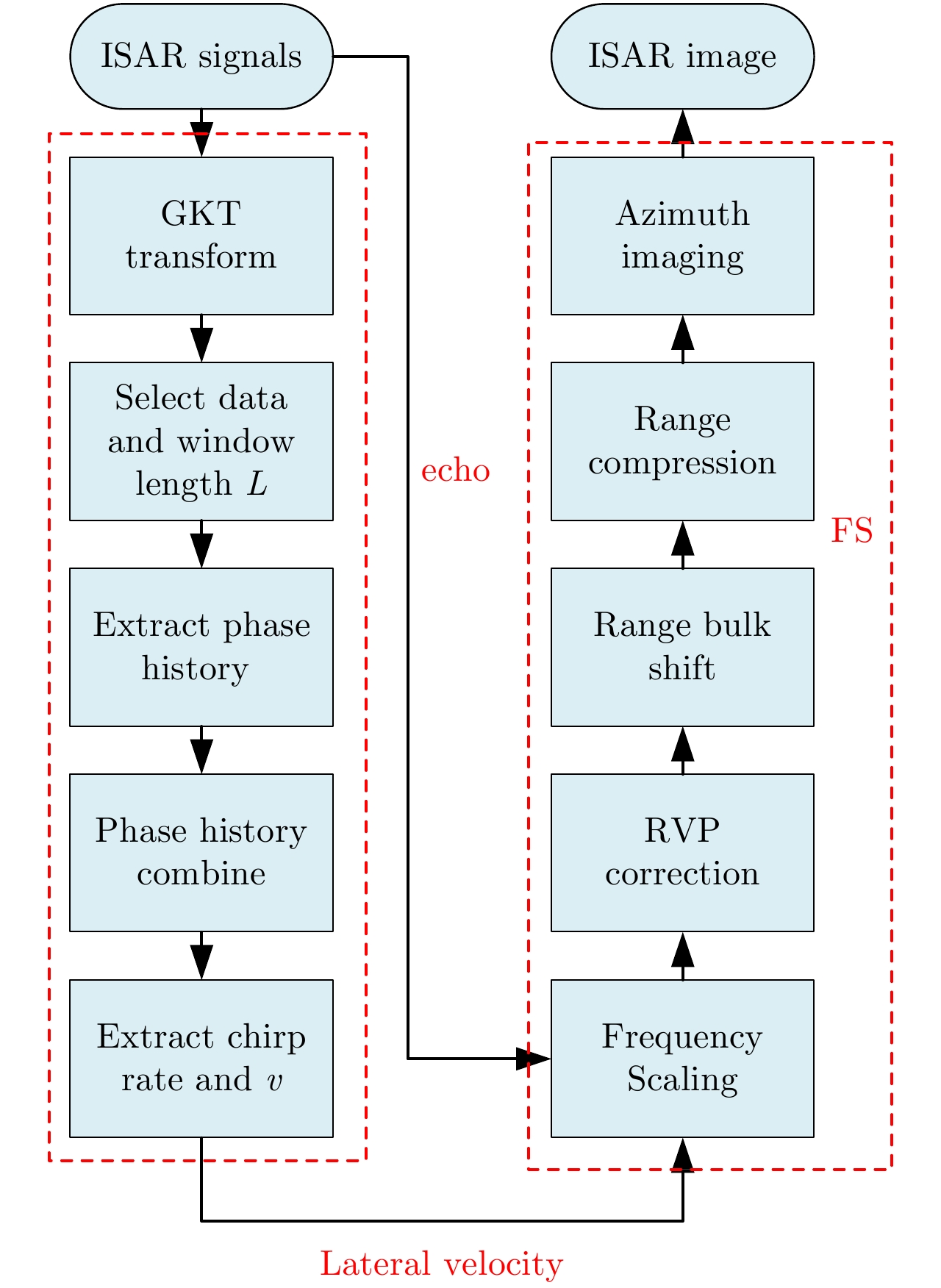
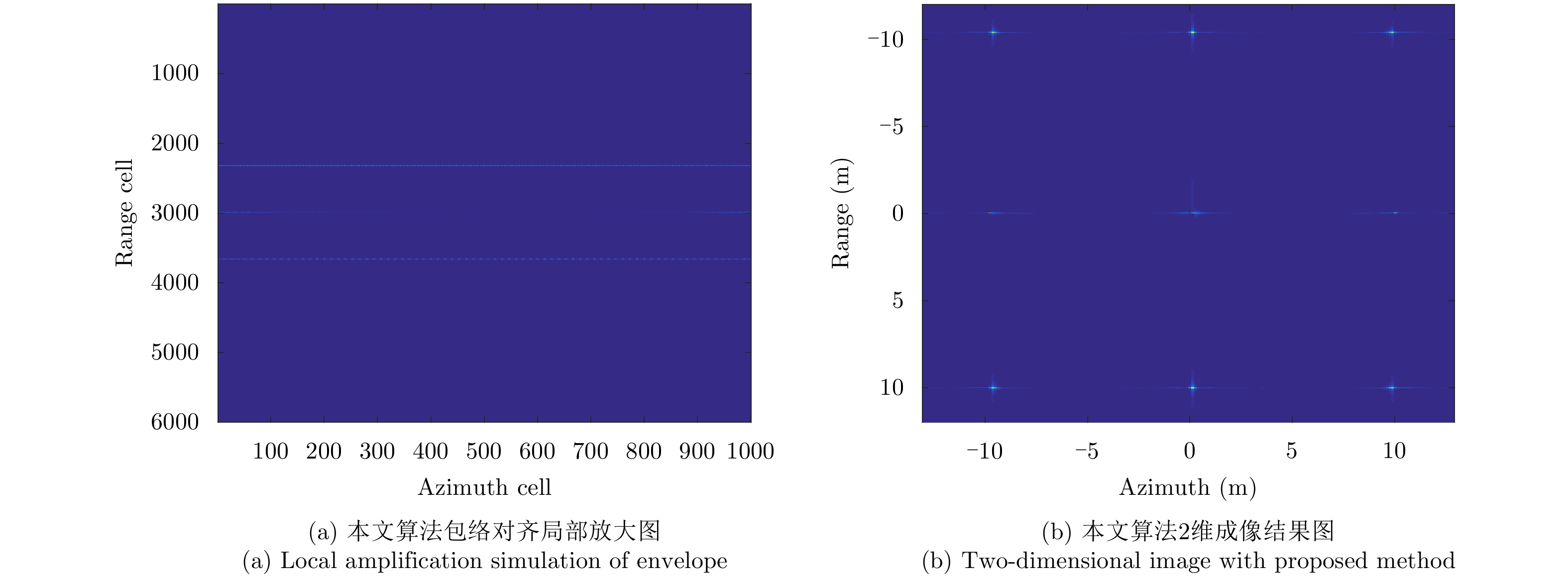
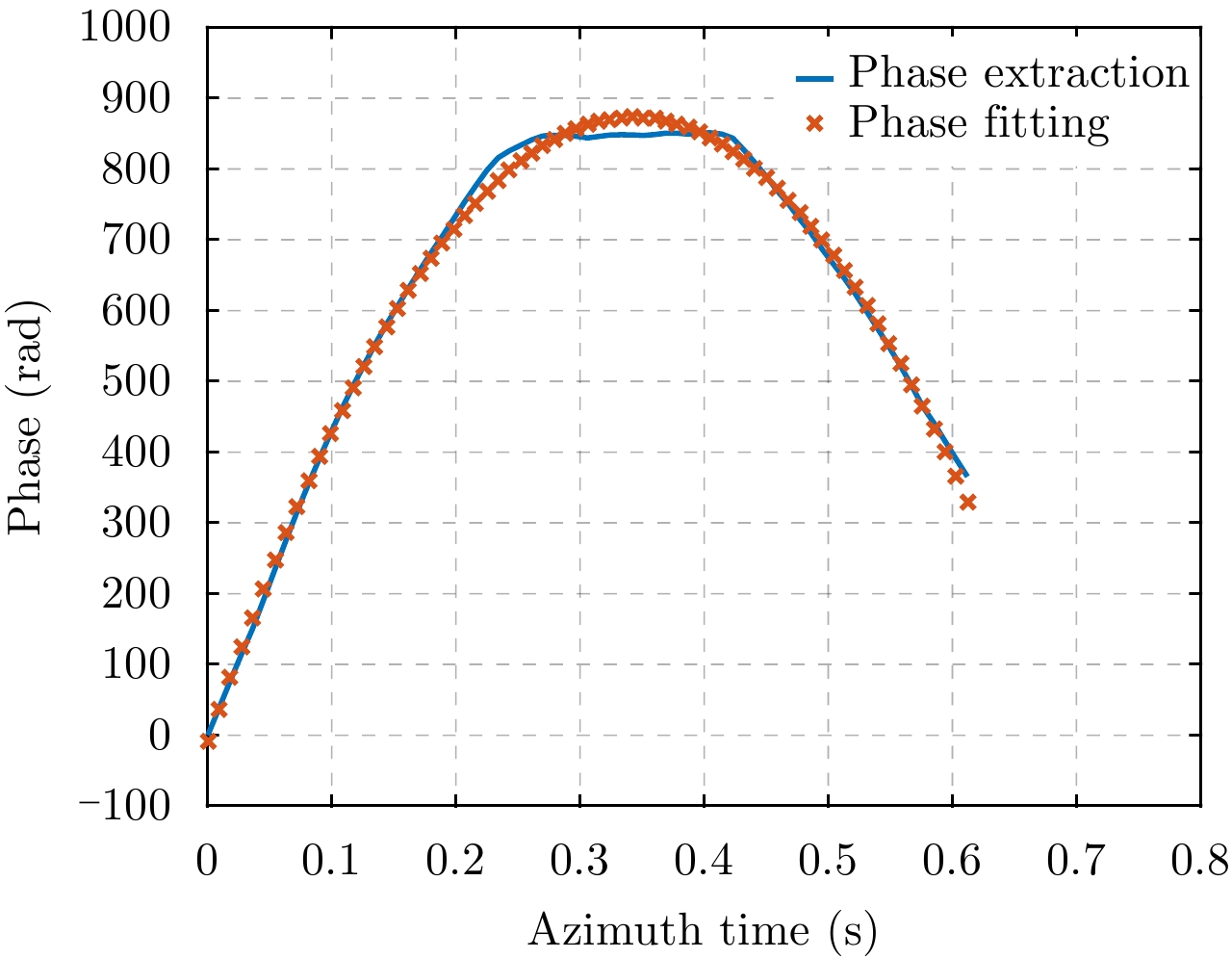
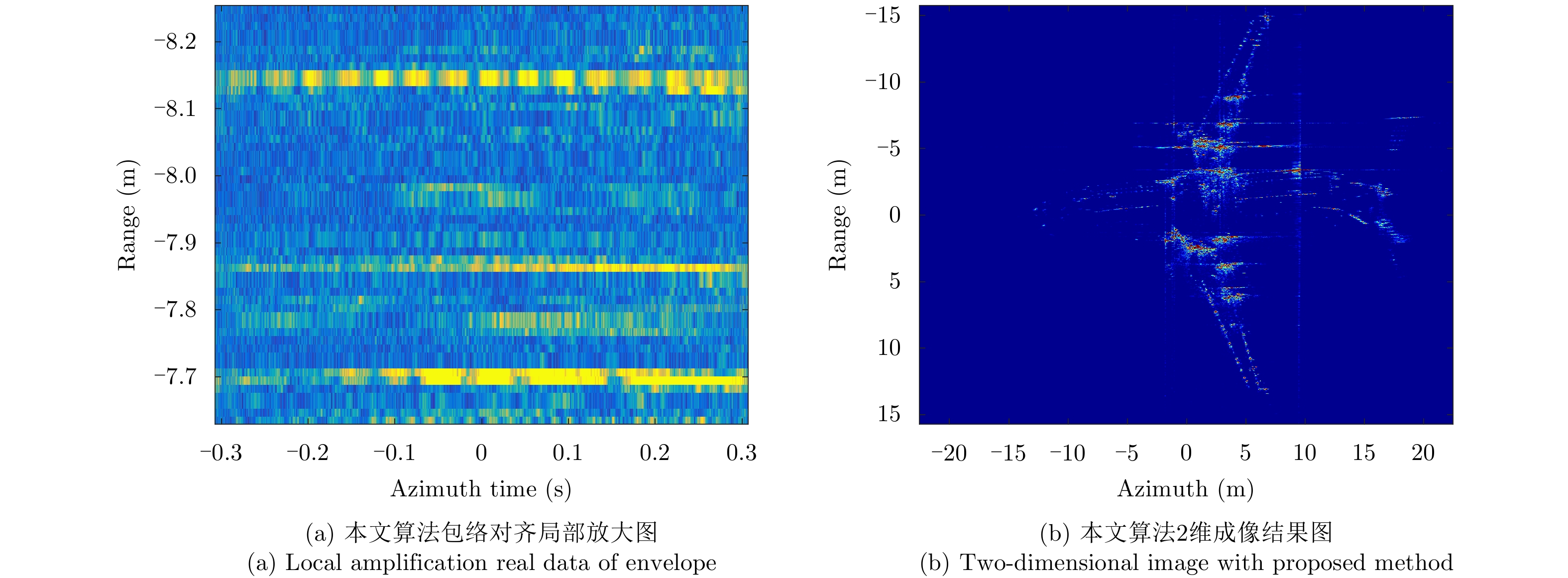
微波光子雷达具有发射大带宽和高载频信号的能力,可实现2维高分辨的逆合成孔径雷达(ISAR)成像。研究相应的实时成像算法具有重要意义。但信号的高距离分辨率特点使得距离弯曲的空变性无法忽略,高载频特性使得相位历程的空变性无法忽略,导致传统的多普勒域实时成像算法成像效果差。另外,计算量较大的波束域成像算法不适用于大数据量的微波光子雷达信号。因此该文提出一种高效率的微波光子ISAR高分辨实时成像算法,该算法首先利用广义楔石变换(GKT)提取特显点相位,进而由相位调频率反演目标横向速度,最后利用速度估计结果结合频率变标(FS)算法完成空变的距离弯曲校正和方位匹配滤波成像。仿真和实测数据的处理结果验证了该算法的有效性。 微波光子雷达具有发射大带宽和高载频信号的能力,可实现2维高分辨的逆合成孔径雷达(ISAR)成像。研究相应的实时成像算法具有重要意义。但信号的高距离分辨率特点使得距离弯曲的空变性无法忽略,高载频特性使得相位历程的空变性无法忽略,导致传统的多普勒域实时成像算法成像效果差。另外,计算量较大的波束域成像算法不适用于大数据量的微波光子雷达信号。因此该文提出一种高效率的微波光子ISAR高分辨实时成像算法,该算法首先利用广义楔石变换(GKT)提取特显点相位,进而由相位调频率反演目标横向速度,最后利用速度估计结果结合频率变标(FS)算法完成空变的距离弯曲校正和方位匹配滤波成像。仿真和实测数据的处理结果验证了该算法的有效性。
微波光子雷达具有发射大带宽和高载频信号的能力,可实现2维高分辨的逆合成孔径雷达(ISAR)成像。研究相应的实时成像算法具有重要意义。但信号的高距离分辨率特点使得距离弯曲的空变性无法忽略,高载频特性使得相位历程的空变性无法忽略,导致传统的多普勒域实时成像算法成像效果差。另外,计算量较大的波束域成像算法不适用于大数据量的微波光子雷达信号。因此该文提出一种高效率的微波光子ISAR高分辨实时成像算法,该算法首先利用广义楔石变换(GKT)提取特显点相位,进而由相位调频率反演目标横向速度,最后利用速度估计结果结合频率变标(FS)算法完成空变的距离弯曲校正和方位匹配滤波成像。仿真和实测数据的处理结果验证了该算法的有效性。 微波光子雷达具有发射大带宽和高载频信号的能力,可实现2维高分辨的逆合成孔径雷达(ISAR)成像。研究相应的实时成像算法具有重要意义。但信号的高距离分辨率特点使得距离弯曲的空变性无法忽略,高载频特性使得相位历程的空变性无法忽略,导致传统的多普勒域实时成像算法成像效果差。另外,计算量较大的波束域成像算法不适用于大数据量的微波光子雷达信号。因此该文提出一种高效率的微波光子ISAR高分辨实时成像算法,该算法首先利用广义楔石变换(GKT)提取特显点相位,进而由相位调频率反演目标横向速度,最后利用速度估计结果结合频率变标(FS)算法完成空变的距离弯曲校正和方位匹配滤波成像。仿真和实测数据的处理结果验证了该算法的有效性。





2019, 8(2): 224-231.
摘要:
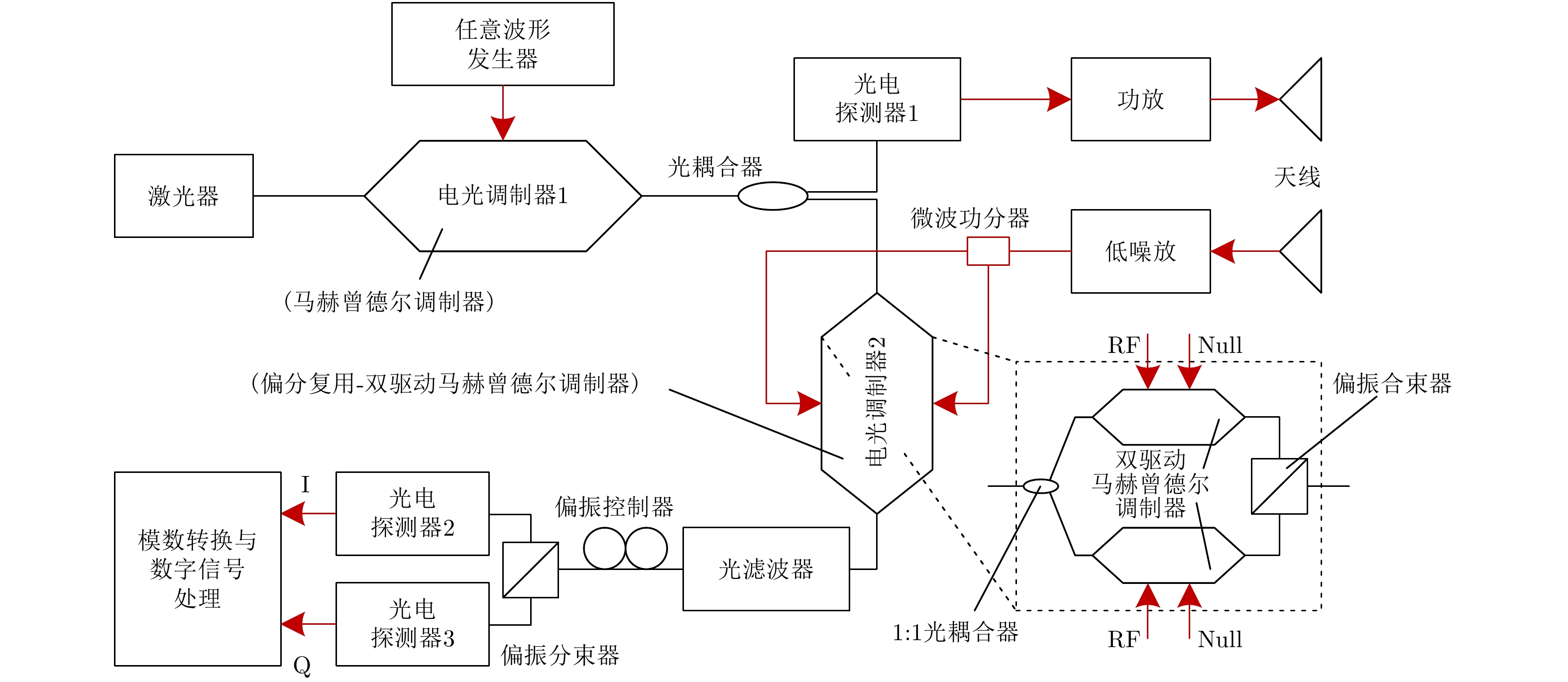
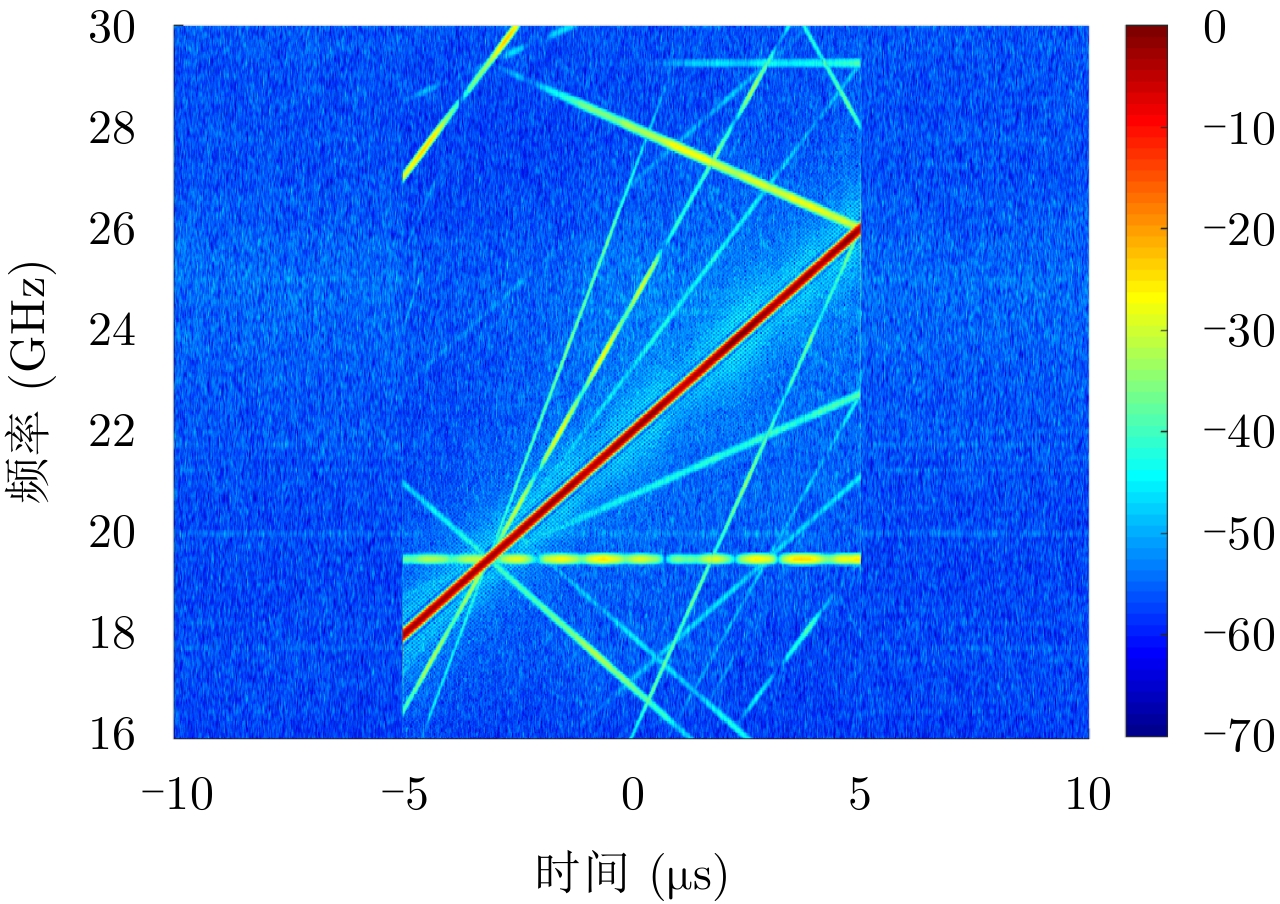
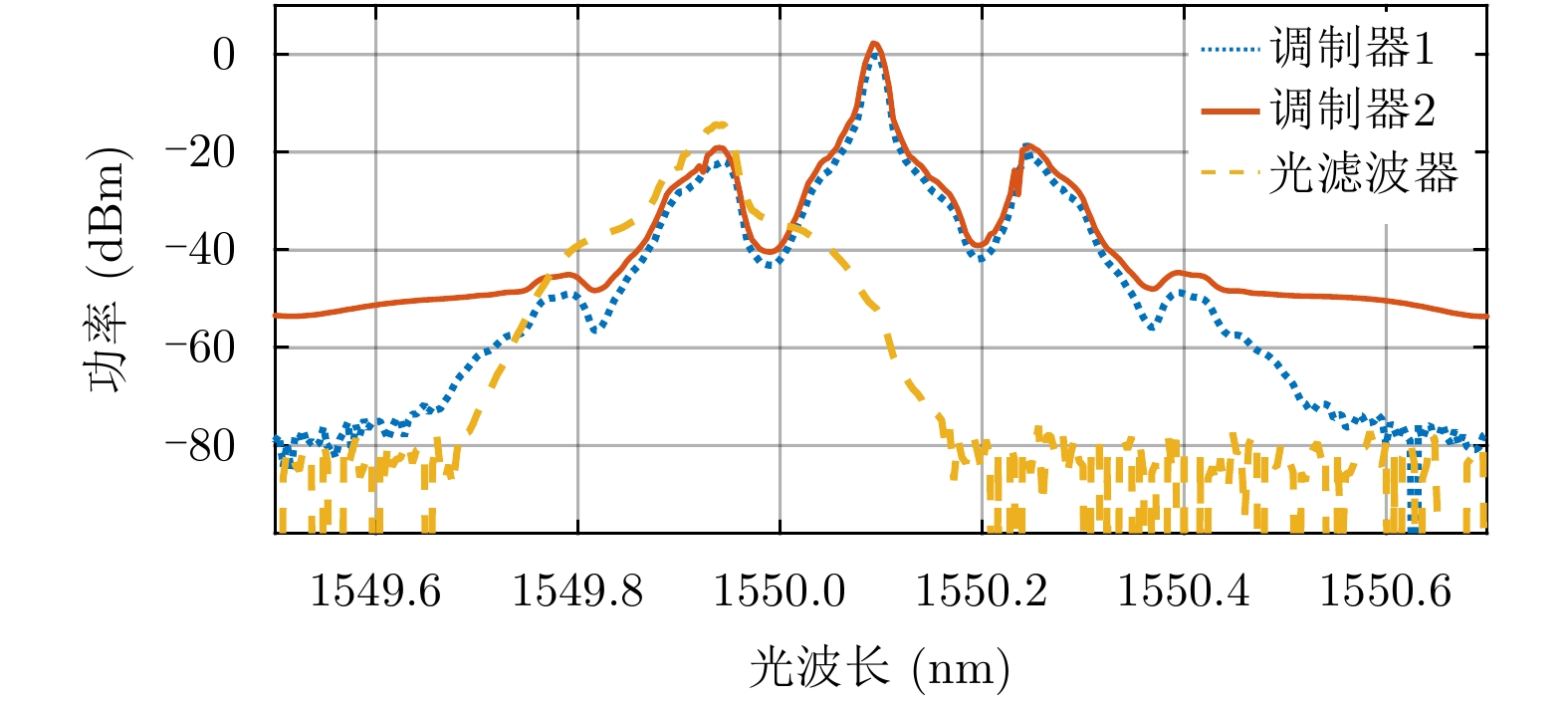
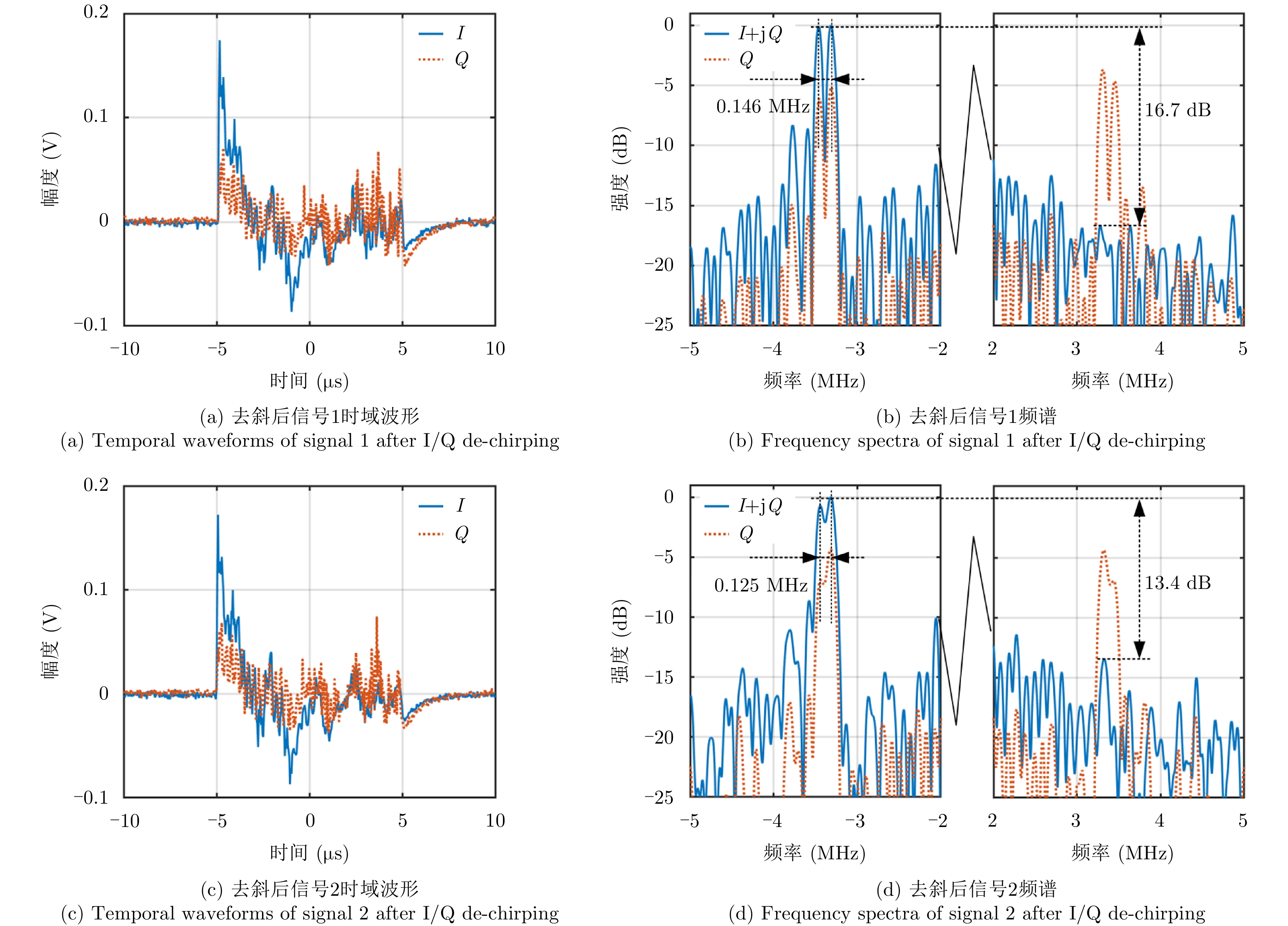
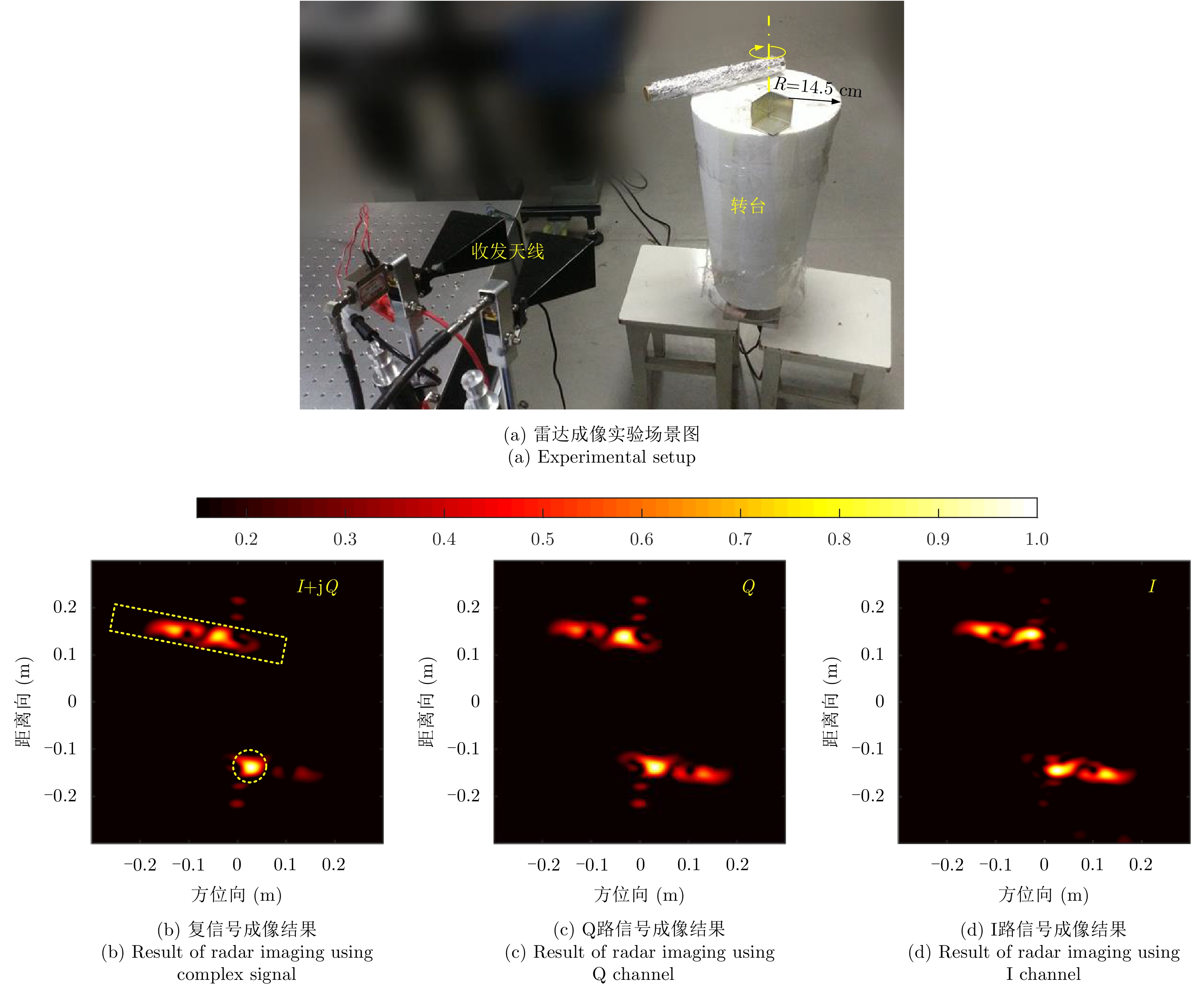
该文提出一种新的基于微波光子I/Q去斜接收的宽带线性调频雷达成像系统方案。发射机利用微波光子倍频技术产生宽带线性调频信号,接收机利用偏分复用-双驱动马赫曾德尔调制器,将回波信号同时输入到两个不同偏振态的调制器上,并通过调节对应调制器的偏置电压在两偏振态之间引入90°相位差,从而实现微波光子I/Q去斜接收。此雷达在具备实时高分辨探测能力的同时,能区分参考点两侧的目标,解决了现有微波光子雷达接收机采用光子混频去斜接收中受镜频干扰导致距离向模糊的问题。该文首先论证了采用I/Q去斜接收的必要性,随后介绍了所提出的微波光子雷达结构与原理,最后开展了目标探测与逆合成孔径雷达成像的实验研究。该雷达工作在K波段,带宽为8 GHz。结果表明该系统可以有效解决镜频干扰引起的距离向模糊。 该文提出一种新的基于微波光子I/Q去斜接收的宽带线性调频雷达成像系统方案。发射机利用微波光子倍频技术产生宽带线性调频信号,接收机利用偏分复用-双驱动马赫曾德尔调制器,将回波信号同时输入到两个不同偏振态的调制器上,并通过调节对应调制器的偏置电压在两偏振态之间引入90°相位差,从而实现微波光子I/Q去斜接收。此雷达在具备实时高分辨探测能力的同时,能区分参考点两侧的目标,解决了现有微波光子雷达接收机采用光子混频去斜接收中受镜频干扰导致距离向模糊的问题。该文首先论证了采用I/Q去斜接收的必要性,随后介绍了所提出的微波光子雷达结构与原理,最后开展了目标探测与逆合成孔径雷达成像的实验研究。该雷达工作在K波段,带宽为8 GHz。结果表明该系统可以有效解决镜频干扰引起的距离向模糊。
该文提出一种新的基于微波光子I/Q去斜接收的宽带线性调频雷达成像系统方案。发射机利用微波光子倍频技术产生宽带线性调频信号,接收机利用偏分复用-双驱动马赫曾德尔调制器,将回波信号同时输入到两个不同偏振态的调制器上,并通过调节对应调制器的偏置电压在两偏振态之间引入90°相位差,从而实现微波光子I/Q去斜接收。此雷达在具备实时高分辨探测能力的同时,能区分参考点两侧的目标,解决了现有微波光子雷达接收机采用光子混频去斜接收中受镜频干扰导致距离向模糊的问题。该文首先论证了采用I/Q去斜接收的必要性,随后介绍了所提出的微波光子雷达结构与原理,最后开展了目标探测与逆合成孔径雷达成像的实验研究。该雷达工作在K波段,带宽为8 GHz。结果表明该系统可以有效解决镜频干扰引起的距离向模糊。 该文提出一种新的基于微波光子I/Q去斜接收的宽带线性调频雷达成像系统方案。发射机利用微波光子倍频技术产生宽带线性调频信号,接收机利用偏分复用-双驱动马赫曾德尔调制器,将回波信号同时输入到两个不同偏振态的调制器上,并通过调节对应调制器的偏置电压在两偏振态之间引入90°相位差,从而实现微波光子I/Q去斜接收。此雷达在具备实时高分辨探测能力的同时,能区分参考点两侧的目标,解决了现有微波光子雷达接收机采用光子混频去斜接收中受镜频干扰导致距离向模糊的问题。该文首先论证了采用I/Q去斜接收的必要性,随后介绍了所提出的微波光子雷达结构与原理,最后开展了目标探测与逆合成孔径雷达成像的实验研究。该雷达工作在K波段,带宽为8 GHz。结果表明该系统可以有效解决镜频干扰引起的距离向模糊。

2019, 8(2): 232-242.
摘要:
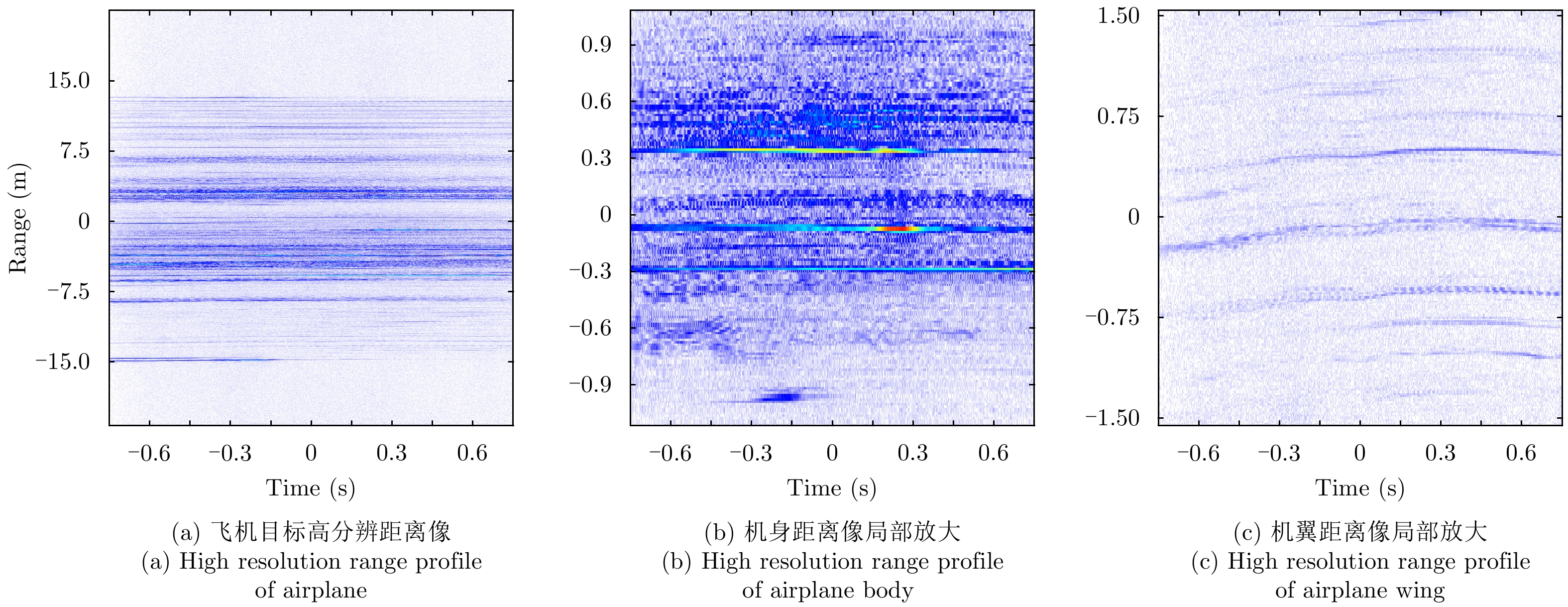
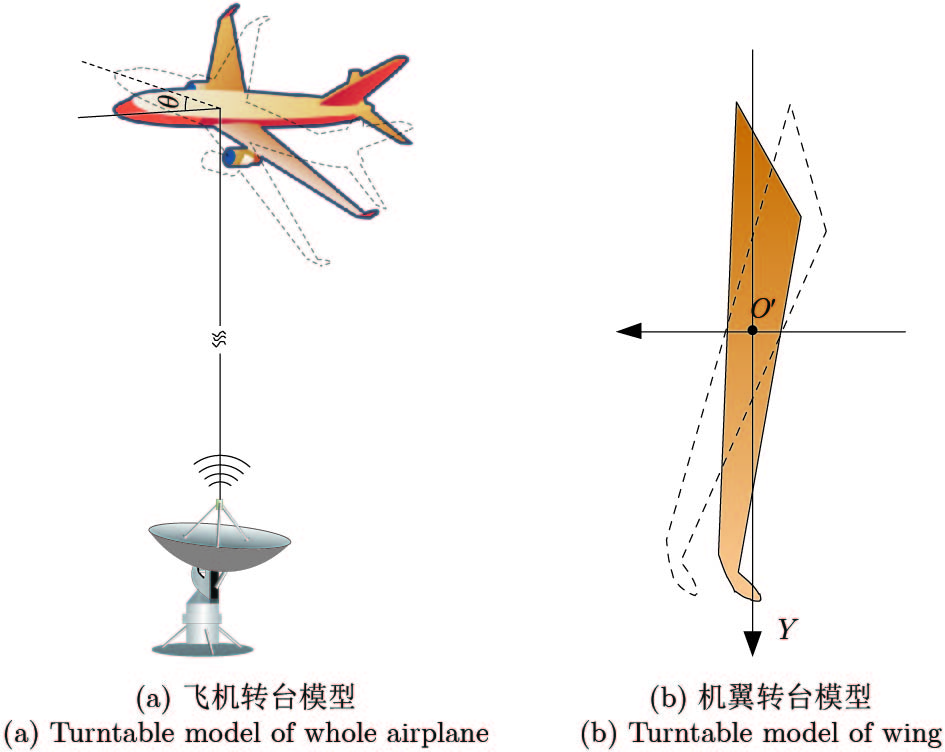
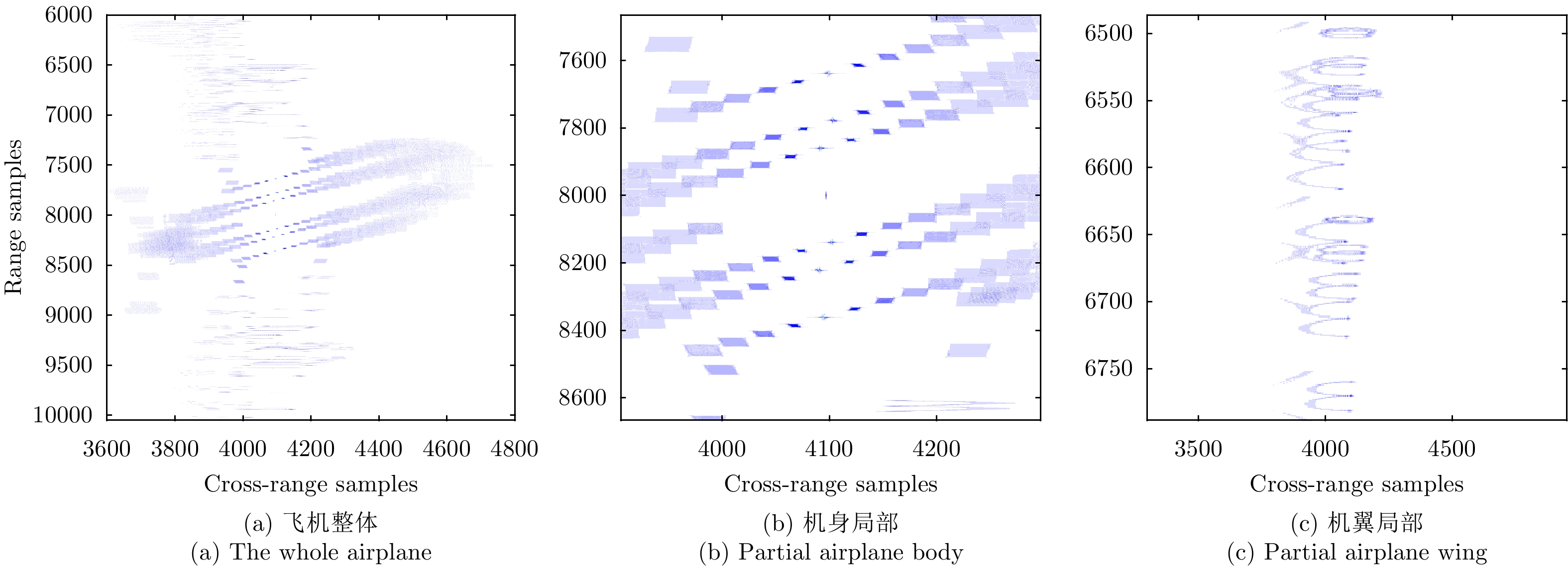
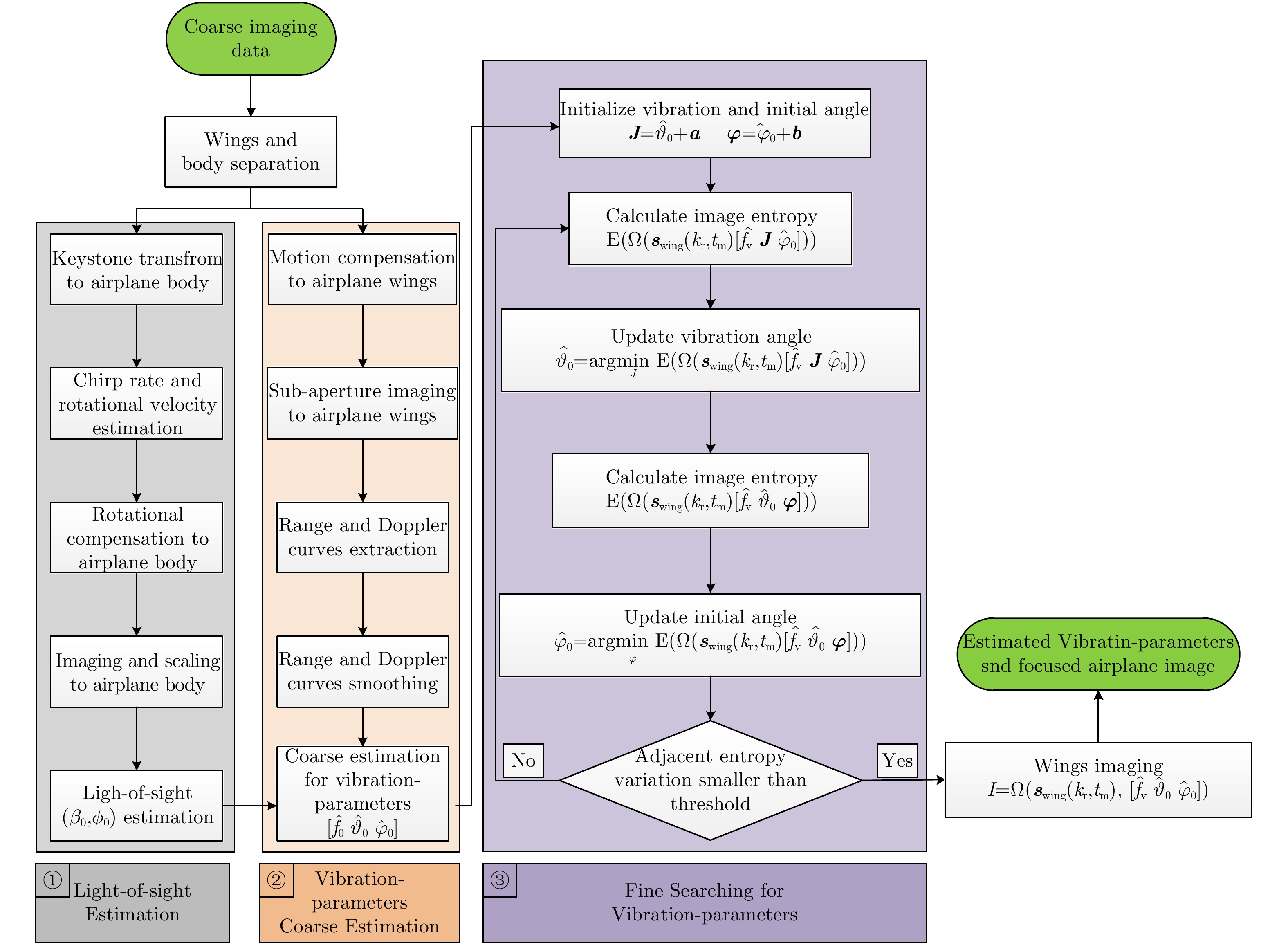
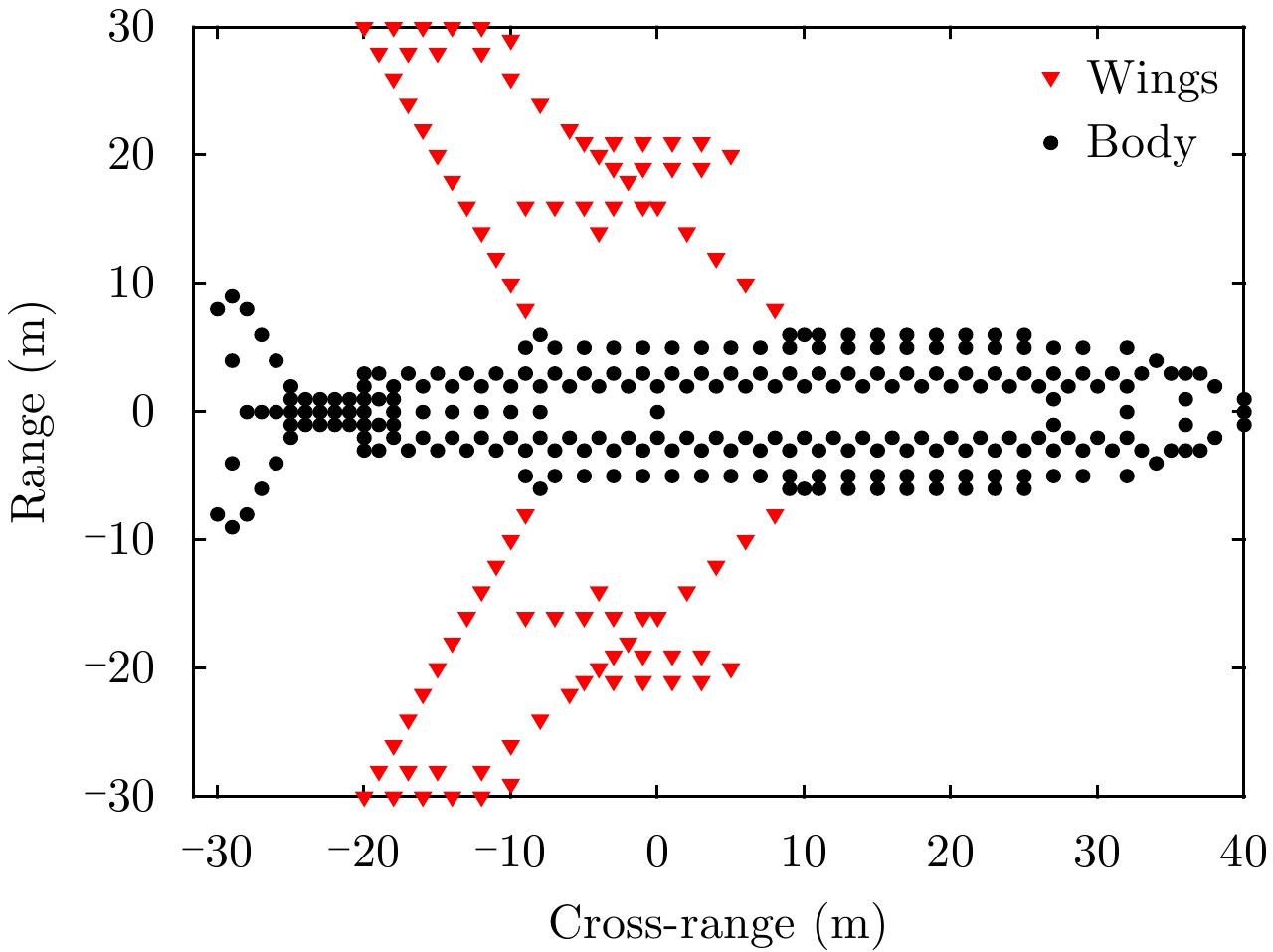
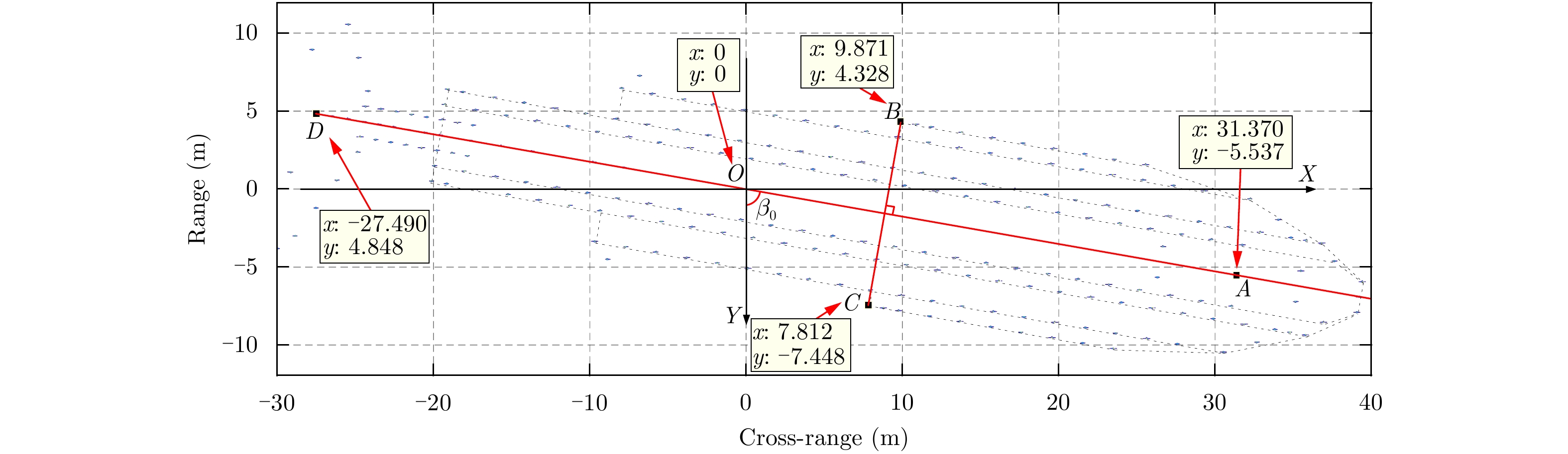
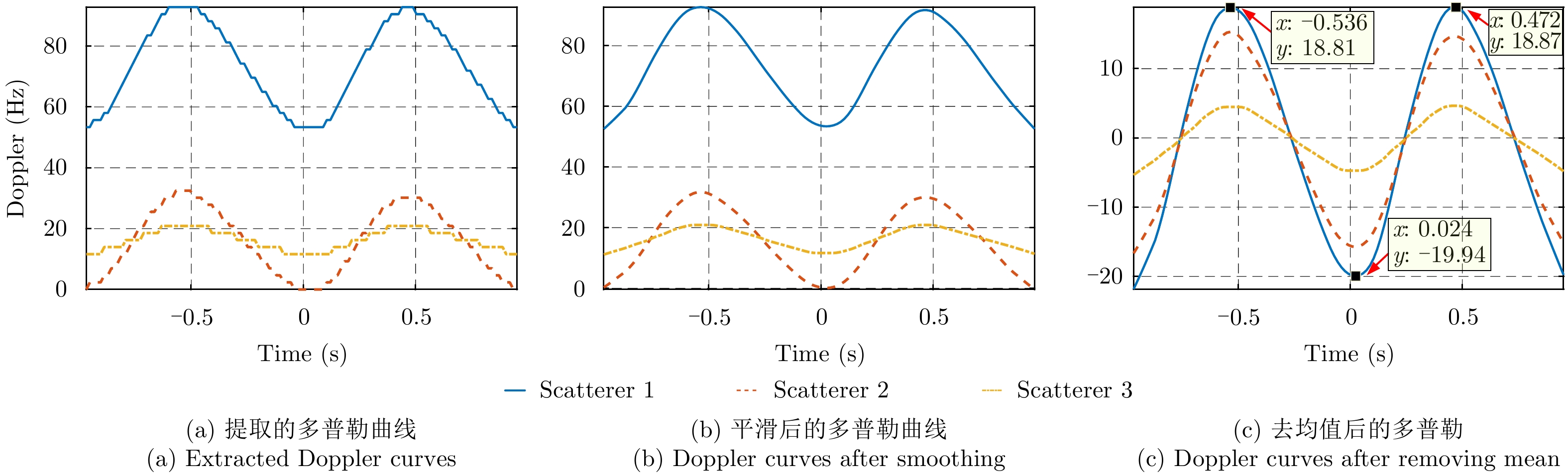
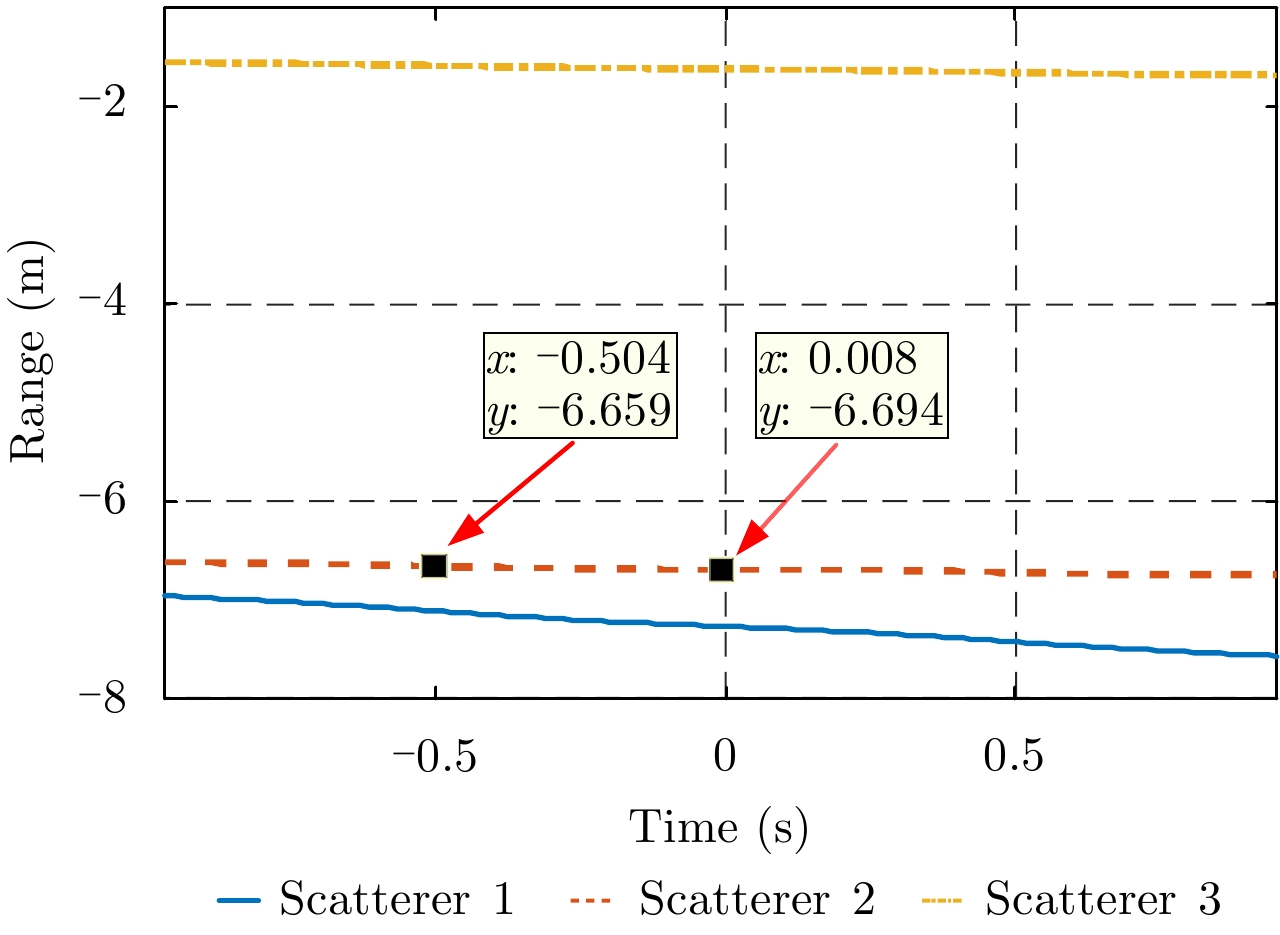
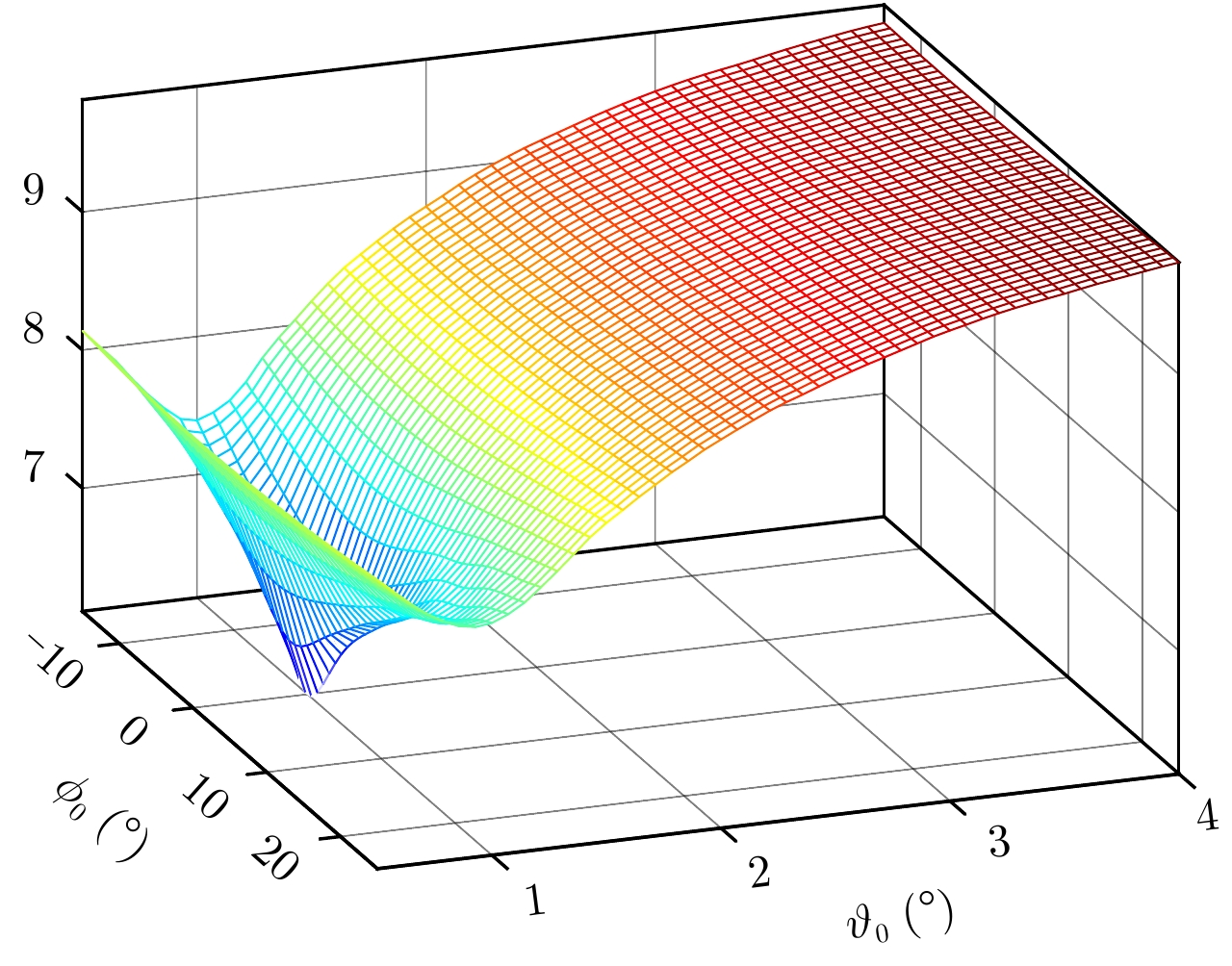
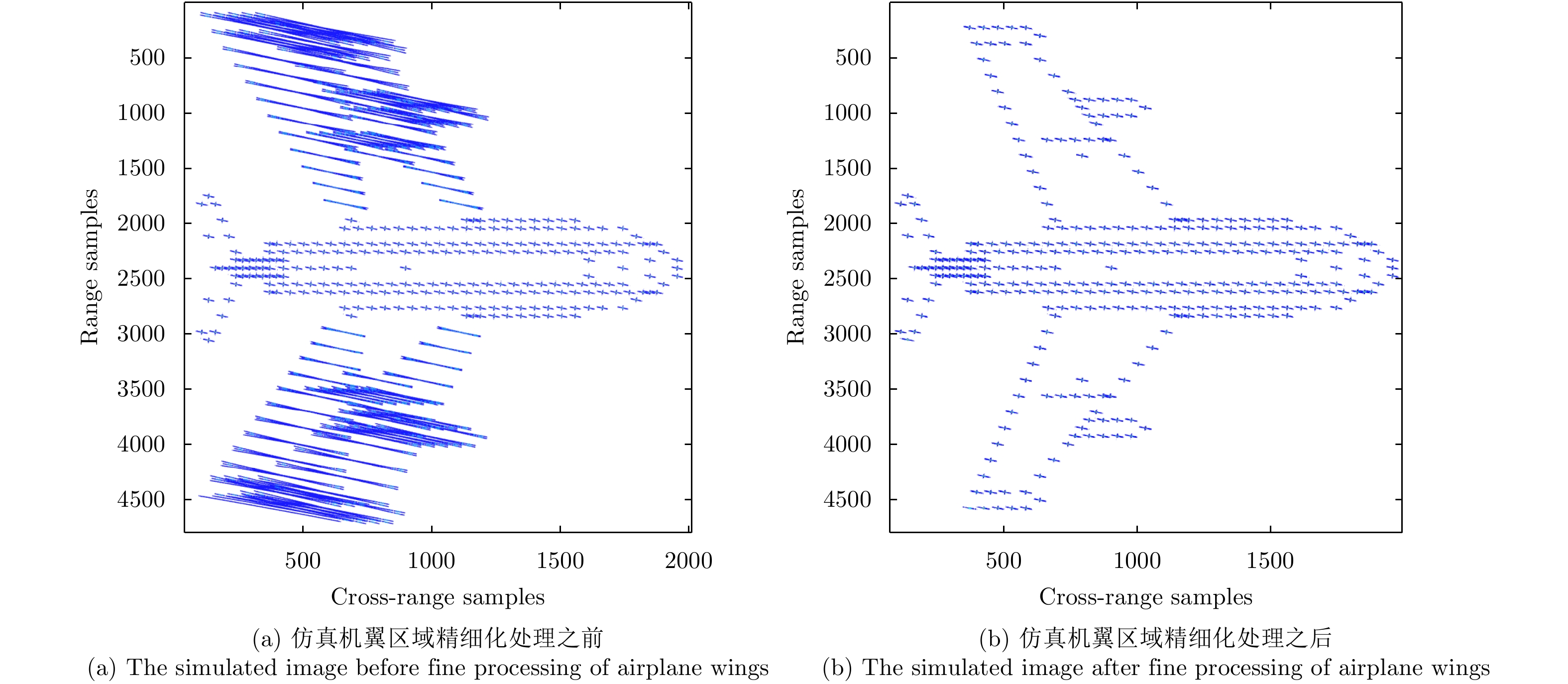
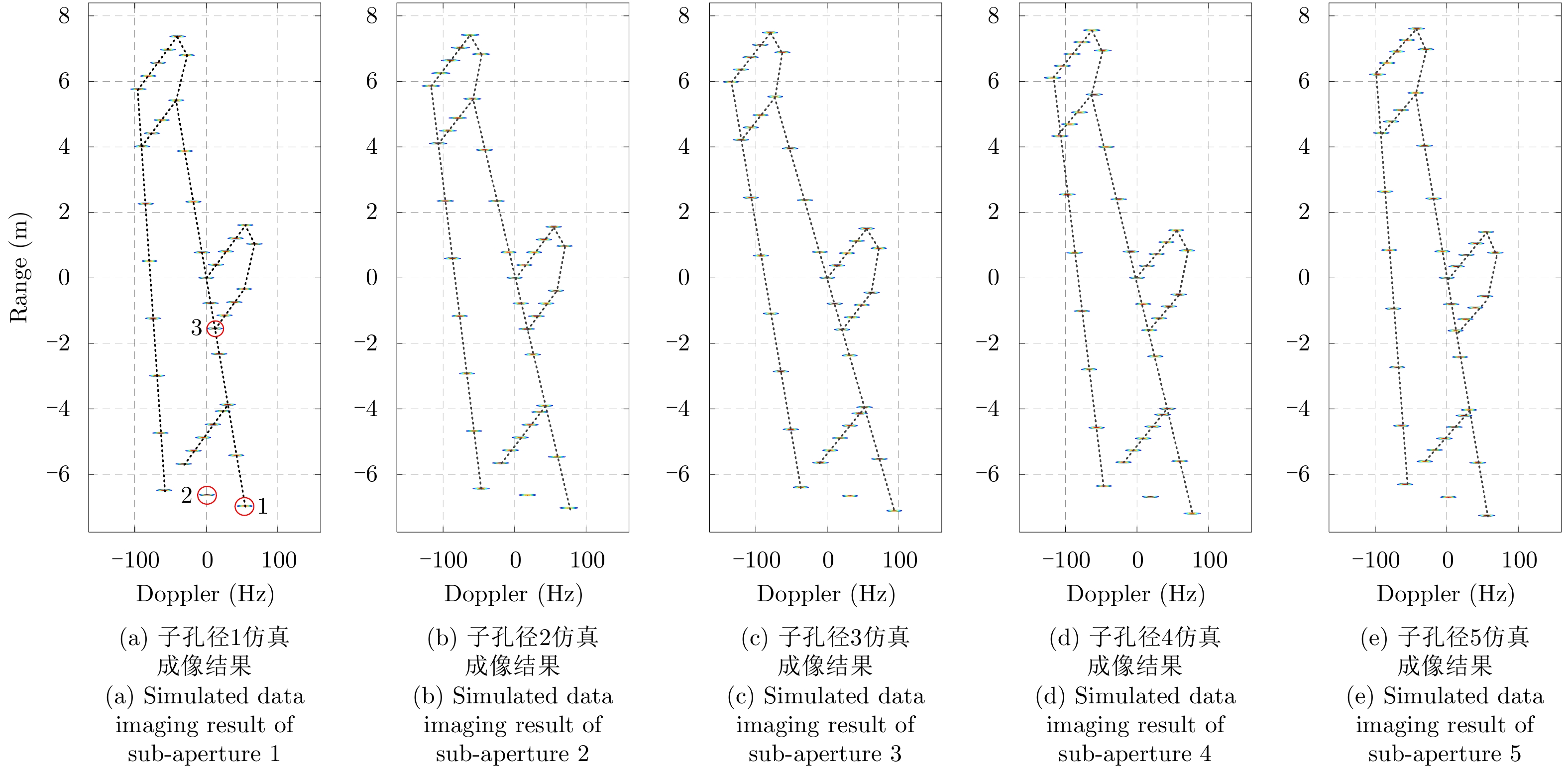
机翼在飞机运动不平稳状态下存在振动,在微波光子超高分辨雷达观测下,这种振动会造成机翼难以聚焦,针对这一难题,该文提出一种基于微波光子超高分辨雷达的机翼振动参数估计方法。首先通过粗成像将机身和机翼回波进行分离,再通过对机身成像和定标结果估计雷达视线角(LOS)。然后对机翼进行子孔径序列成像,提取散射点的距离和多普勒变化曲线,再联合雷达LOS以及距离和多普勒曲线对振动参数进行粗估计,最后通过修正的极坐标格式算法(MPFA)以及构造最小熵优化函数对振动参数进行精估计。该文首次提出了修正的极坐标格式算法,其能够对复杂运动的目标进行距离和方位向的解耦,如震动的机翼和摇摆的舰船等。仿真和实测数据的处理结果验证了该方法的有效性和实用性。 机翼在飞机运动不平稳状态下存在振动,在微波光子超高分辨雷达观测下,这种振动会造成机翼难以聚焦,针对这一难题,该文提出一种基于微波光子超高分辨雷达的机翼振动参数估计方法。首先通过粗成像将机身和机翼回波进行分离,再通过对机身成像和定标结果估计雷达视线角(LOS)。然后对机翼进行子孔径序列成像,提取散射点的距离和多普勒变化曲线,再联合雷达LOS以及距离和多普勒曲线对振动参数进行粗估计,最后通过修正的极坐标格式算法(MPFA)以及构造最小熵优化函数对振动参数进行精估计。该文首次提出了修正的极坐标格式算法,其能够对复杂运动的目标进行距离和方位向的解耦,如震动的机翼和摇摆的舰船等。仿真和实测数据的处理结果验证了该方法的有效性和实用性。
机翼在飞机运动不平稳状态下存在振动,在微波光子超高分辨雷达观测下,这种振动会造成机翼难以聚焦,针对这一难题,该文提出一种基于微波光子超高分辨雷达的机翼振动参数估计方法。首先通过粗成像将机身和机翼回波进行分离,再通过对机身成像和定标结果估计雷达视线角(LOS)。然后对机翼进行子孔径序列成像,提取散射点的距离和多普勒变化曲线,再联合雷达LOS以及距离和多普勒曲线对振动参数进行粗估计,最后通过修正的极坐标格式算法(MPFA)以及构造最小熵优化函数对振动参数进行精估计。该文首次提出了修正的极坐标格式算法,其能够对复杂运动的目标进行距离和方位向的解耦,如震动的机翼和摇摆的舰船等。仿真和实测数据的处理结果验证了该方法的有效性和实用性。 机翼在飞机运动不平稳状态下存在振动,在微波光子超高分辨雷达观测下,这种振动会造成机翼难以聚焦,针对这一难题,该文提出一种基于微波光子超高分辨雷达的机翼振动参数估计方法。首先通过粗成像将机身和机翼回波进行分离,再通过对机身成像和定标结果估计雷达视线角(LOS)。然后对机翼进行子孔径序列成像,提取散射点的距离和多普勒变化曲线,再联合雷达LOS以及距离和多普勒曲线对振动参数进行粗估计,最后通过修正的极坐标格式算法(MPFA)以及构造最小熵优化函数对振动参数进行精估计。该文首次提出了修正的极坐标格式算法,其能够对复杂运动的目标进行距离和方位向的解耦,如震动的机翼和摇摆的舰船等。仿真和实测数据的处理结果验证了该方法的有效性和实用性。




2019, 8(2): 243-250.
摘要:
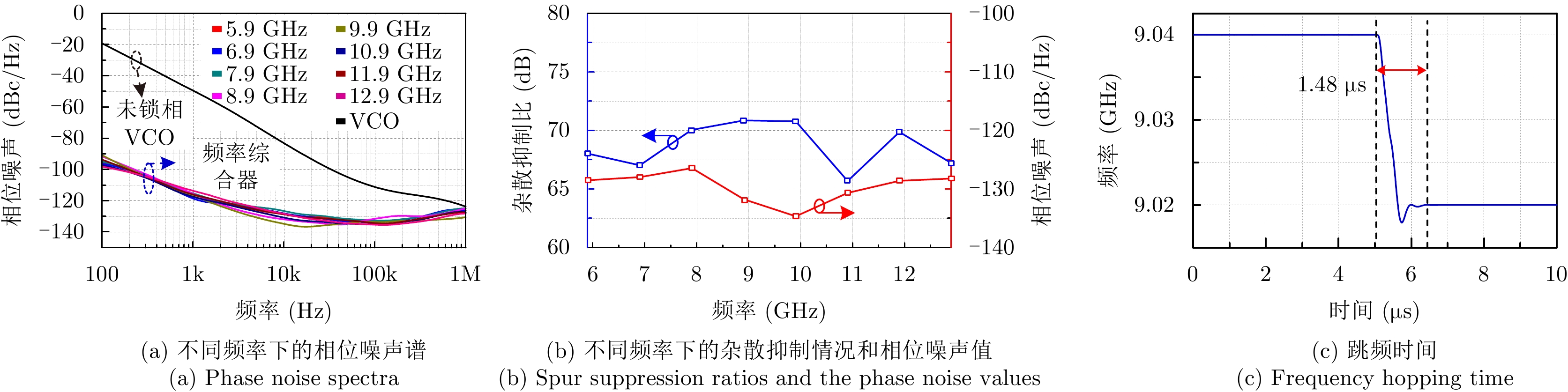
该文提出一种基于级联相位调制器的注入锁定光电振荡器及其频率综合系统。该文提出的光电振荡器利用相位调制实现调制器输出光谱展宽并保持光纤中传播功率恒定,降低光纤非线性效应引入的强度噪声。采用双输出MZI级联平衡探测器的结构完成相位调制到强度调制的转化,提高系统的信噪比,实现频率为9.9999914 GHz、边模抑制比大于85 dB、10 kHz频偏相位噪声为–153.1 dBc/Hz的超低相位噪声信号输出。此外,还基于所提出的超低相位噪声光电振荡器构建了宽带、高性能频率综合系统。联合DDS和PLL的混合锁相技术,所提出频率综合器的输出频率成功覆盖5.9~12.9 GHz,相位噪声达到–130 dBc/Hz@10 kHz,杂散抑制比优于65 dB,跳频时间小于1.48 μs。 该文提出一种基于级联相位调制器的注入锁定光电振荡器及其频率综合系统。该文提出的光电振荡器利用相位调制实现调制器输出光谱展宽并保持光纤中传播功率恒定,降低光纤非线性效应引入的强度噪声。采用双输出MZI级联平衡探测器的结构完成相位调制到强度调制的转化,提高系统的信噪比,实现频率为9.9999914 GHz、边模抑制比大于85 dB、10 kHz频偏相位噪声为–153.1 dBc/Hz的超低相位噪声信号输出。此外,还基于所提出的超低相位噪声光电振荡器构建了宽带、高性能频率综合系统。联合DDS和PLL的混合锁相技术,所提出频率综合器的输出频率成功覆盖5.9~12.9 GHz,相位噪声达到–130 dBc/Hz@10 kHz,杂散抑制比优于65 dB,跳频时间小于1.48 μs。
该文提出一种基于级联相位调制器的注入锁定光电振荡器及其频率综合系统。该文提出的光电振荡器利用相位调制实现调制器输出光谱展宽并保持光纤中传播功率恒定,降低光纤非线性效应引入的强度噪声。采用双输出MZI级联平衡探测器的结构完成相位调制到强度调制的转化,提高系统的信噪比,实现频率为9.9999914 GHz、边模抑制比大于85 dB、10 kHz频偏相位噪声为–153.1 dBc/Hz的超低相位噪声信号输出。此外,还基于所提出的超低相位噪声光电振荡器构建了宽带、高性能频率综合系统。联合DDS和PLL的混合锁相技术,所提出频率综合器的输出频率成功覆盖5.9~12.9 GHz,相位噪声达到–130 dBc/Hz@10 kHz,杂散抑制比优于65 dB,跳频时间小于1.48 μs。 该文提出一种基于级联相位调制器的注入锁定光电振荡器及其频率综合系统。该文提出的光电振荡器利用相位调制实现调制器输出光谱展宽并保持光纤中传播功率恒定,降低光纤非线性效应引入的强度噪声。采用双输出MZI级联平衡探测器的结构完成相位调制到强度调制的转化,提高系统的信噪比,实现频率为9.9999914 GHz、边模抑制比大于85 dB、10 kHz频偏相位噪声为–153.1 dBc/Hz的超低相位噪声信号输出。此外,还基于所提出的超低相位噪声光电振荡器构建了宽带、高性能频率综合系统。联合DDS和PLL的混合锁相技术,所提出频率综合器的输出频率成功覆盖5.9~12.9 GHz,相位噪声达到–130 dBc/Hz@10 kHz,杂散抑制比优于65 dB,跳频时间小于1.48 μs。




2019, 8(2): 251-261.
摘要:
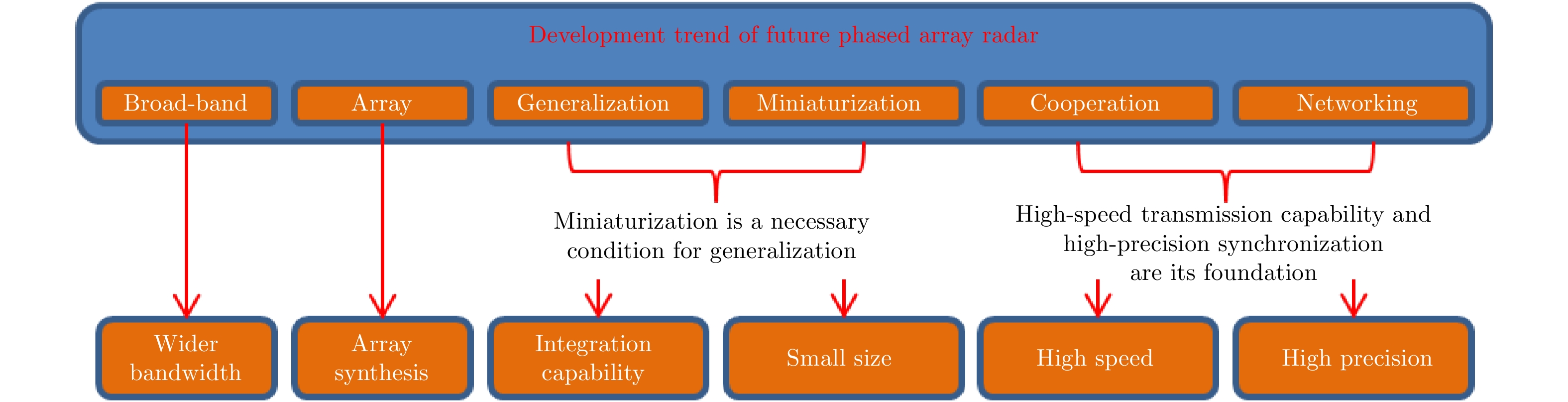
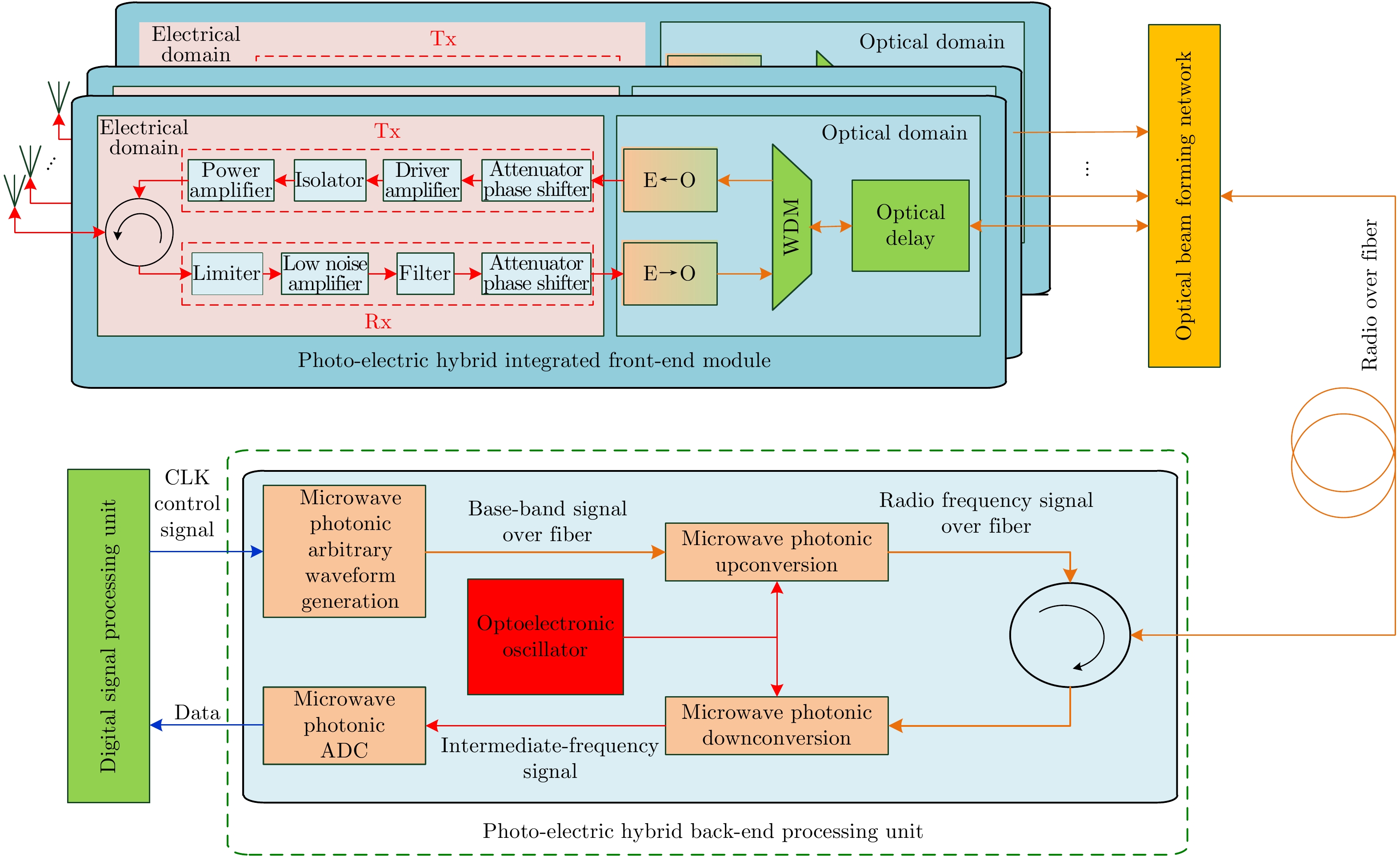
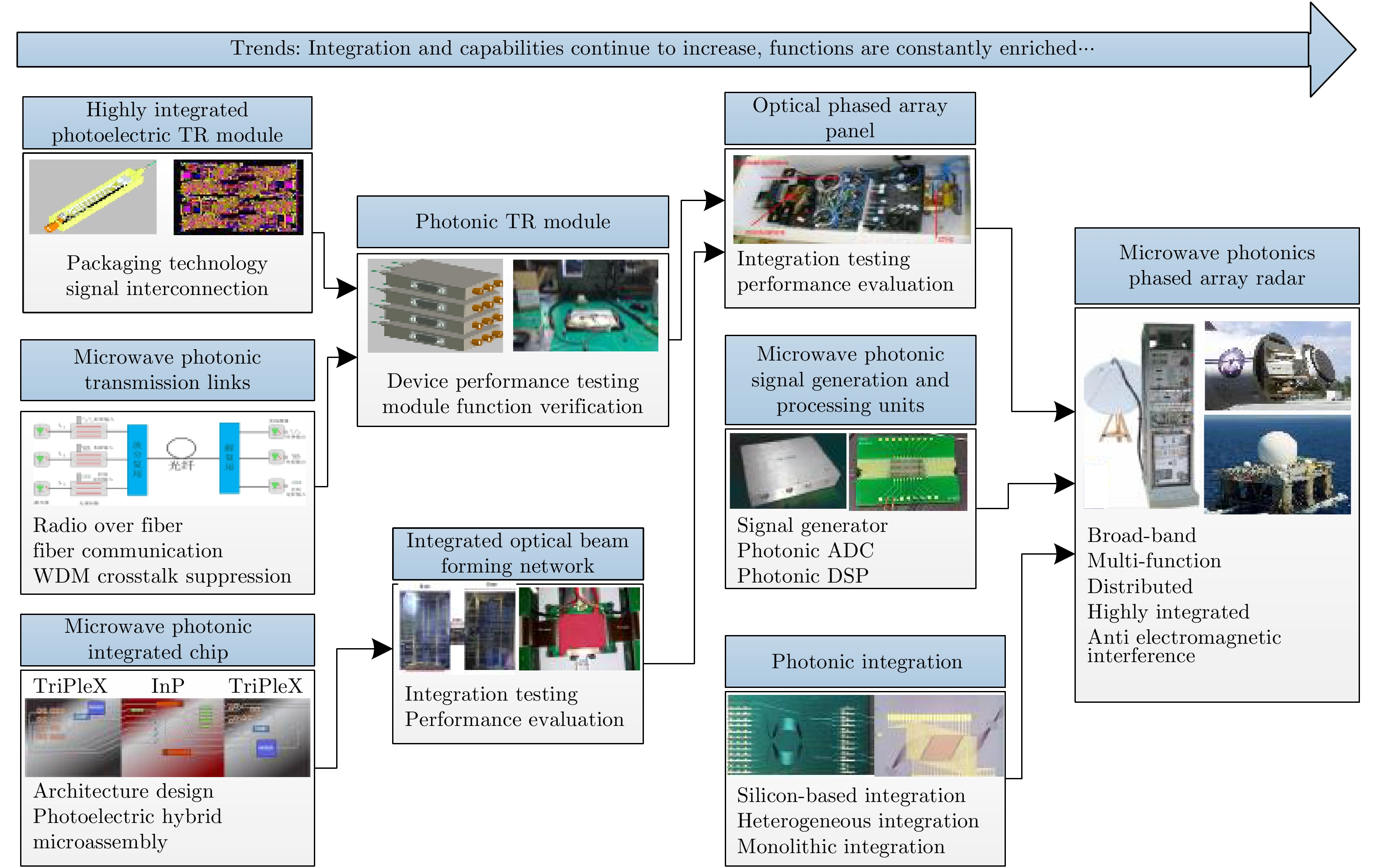
该文探讨了相控阵雷达的发展需求,提出了基于微波光子技术的新型相控阵的架构形式和技术路线。针对其工程实现,凝练了当前所面临的主要科学问题和重大技术挑战,并对未来的研究工作和该领域的发展进行了展望。 该文探讨了相控阵雷达的发展需求,提出了基于微波光子技术的新型相控阵的架构形式和技术路线。针对其工程实现,凝练了当前所面临的主要科学问题和重大技术挑战,并对未来的研究工作和该领域的发展进行了展望。
该文探讨了相控阵雷达的发展需求,提出了基于微波光子技术的新型相控阵的架构形式和技术路线。针对其工程实现,凝练了当前所面临的主要科学问题和重大技术挑战,并对未来的研究工作和该领域的发展进行了展望。 该文探讨了相控阵雷达的发展需求,提出了基于微波光子技术的新型相控阵的架构形式和技术路线。针对其工程实现,凝练了当前所面临的主要科学问题和重大技术挑战,并对未来的研究工作和该领域的发展进行了展望。
2019, 8(2): 262-280.
摘要:
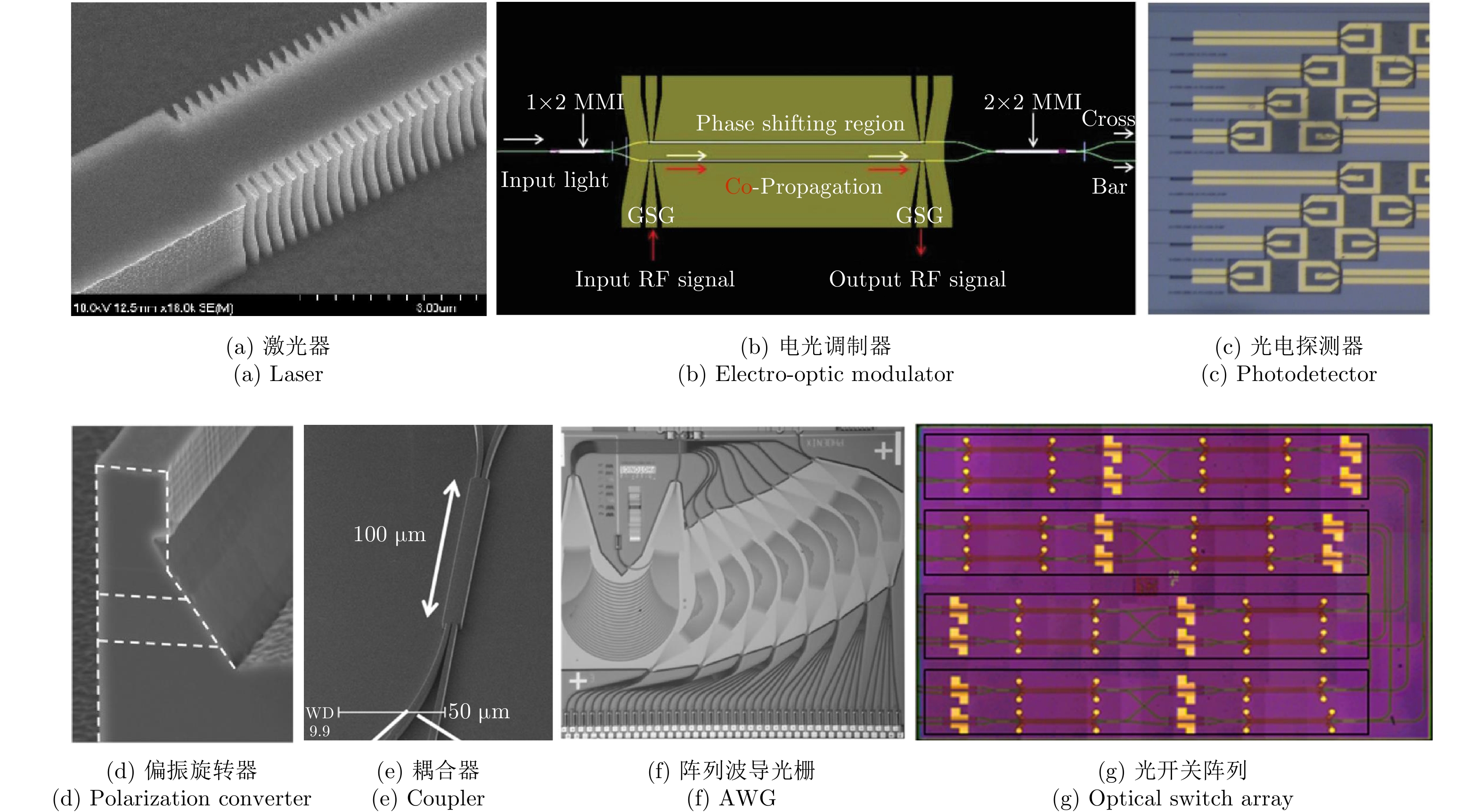
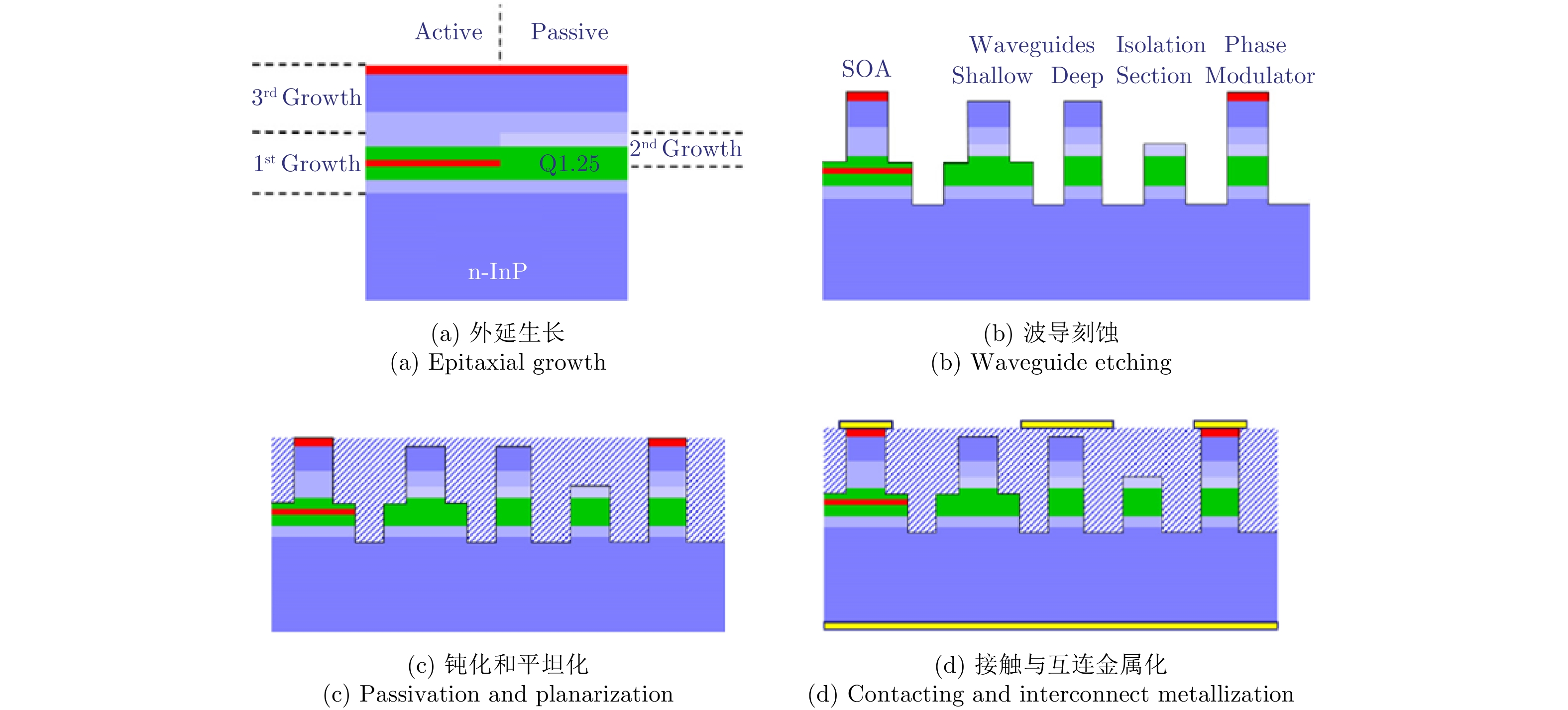
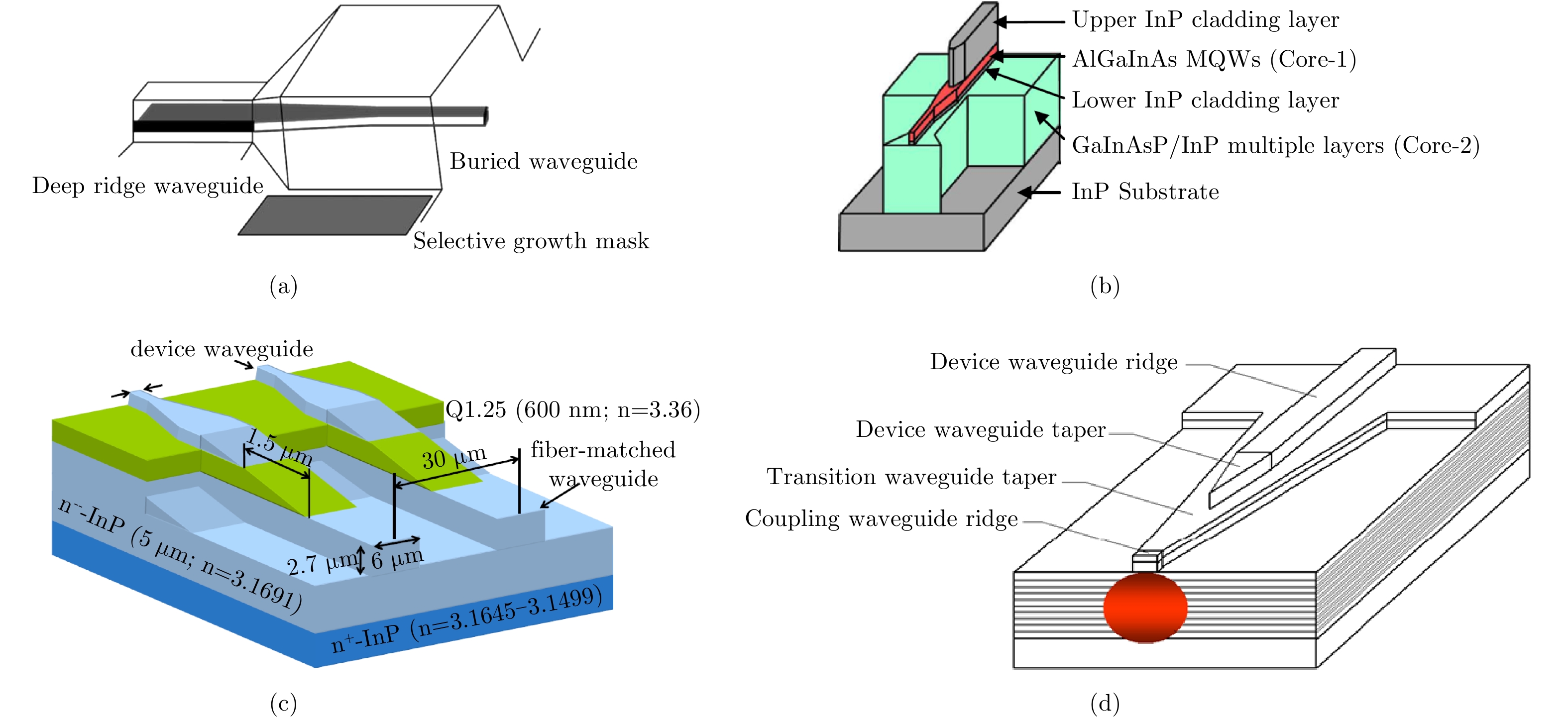
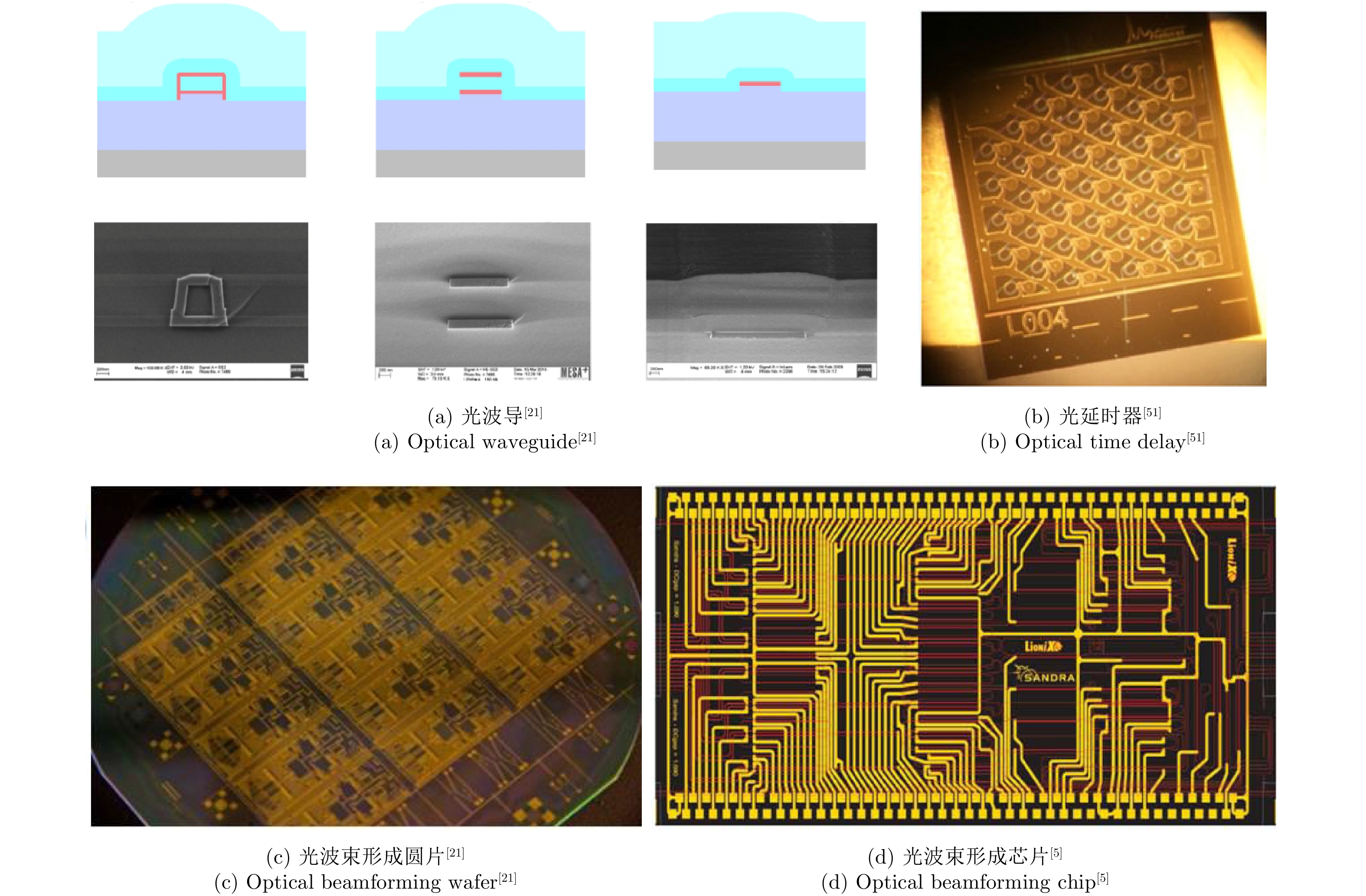
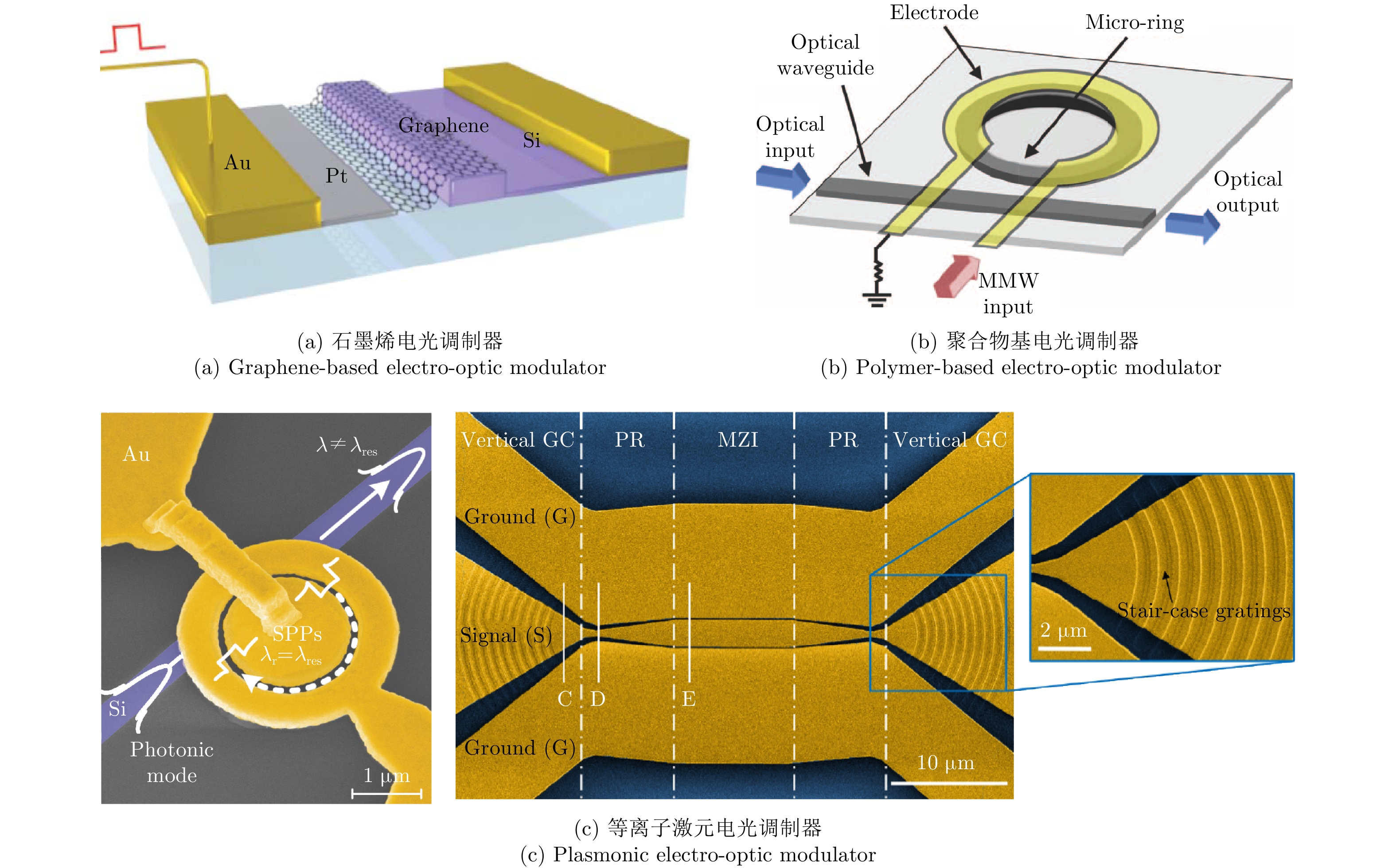
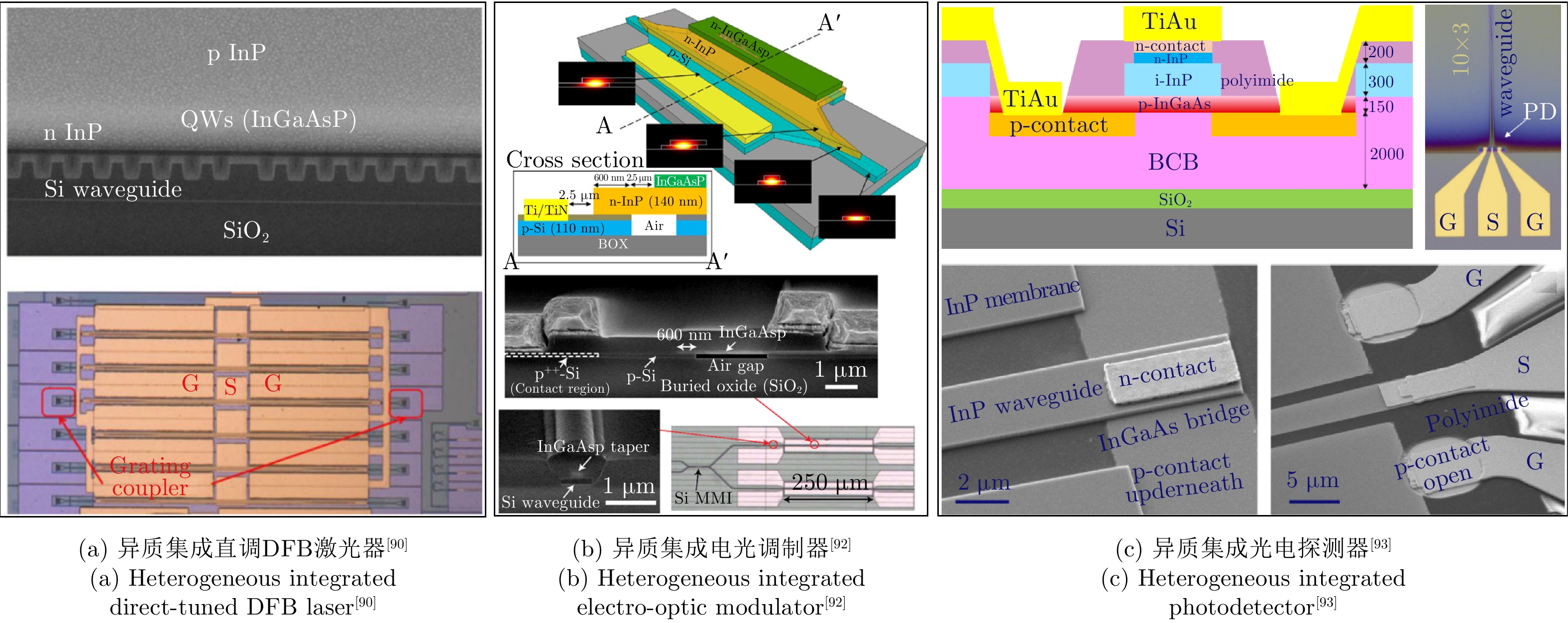
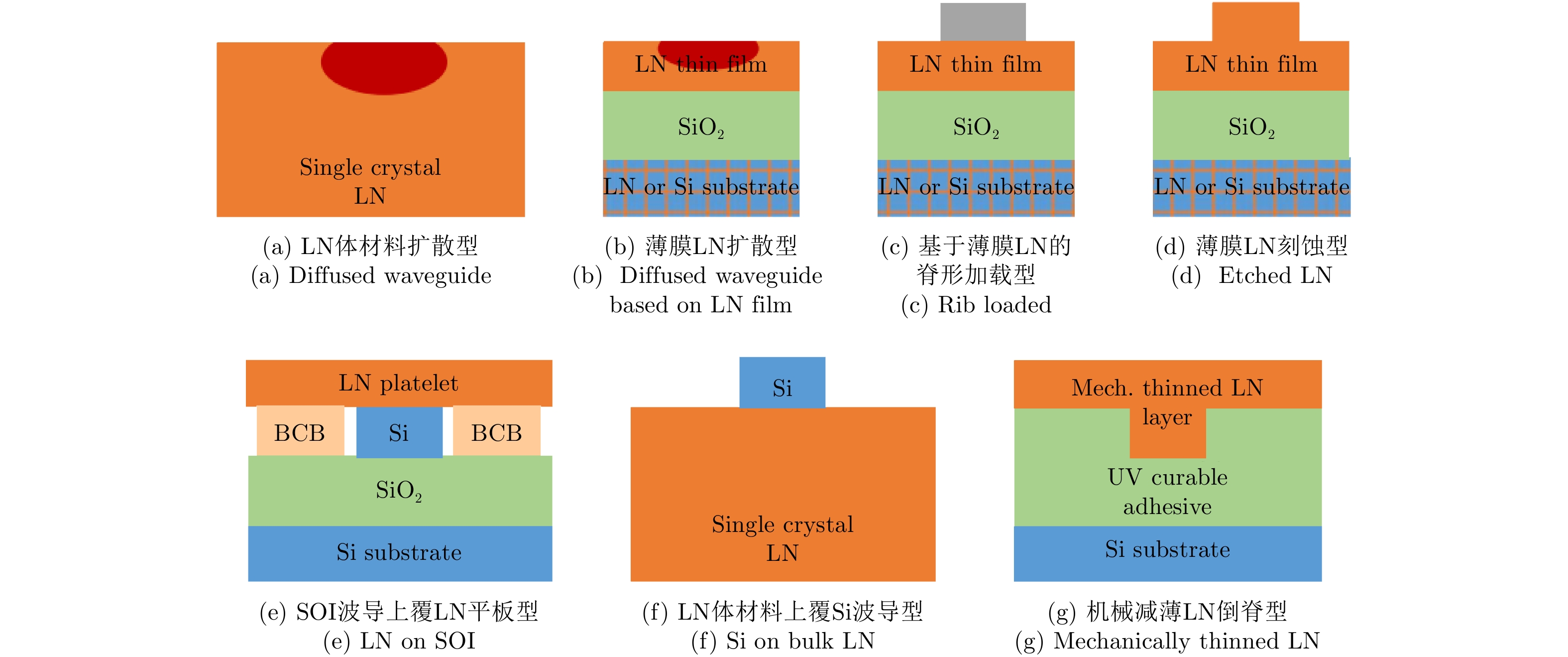
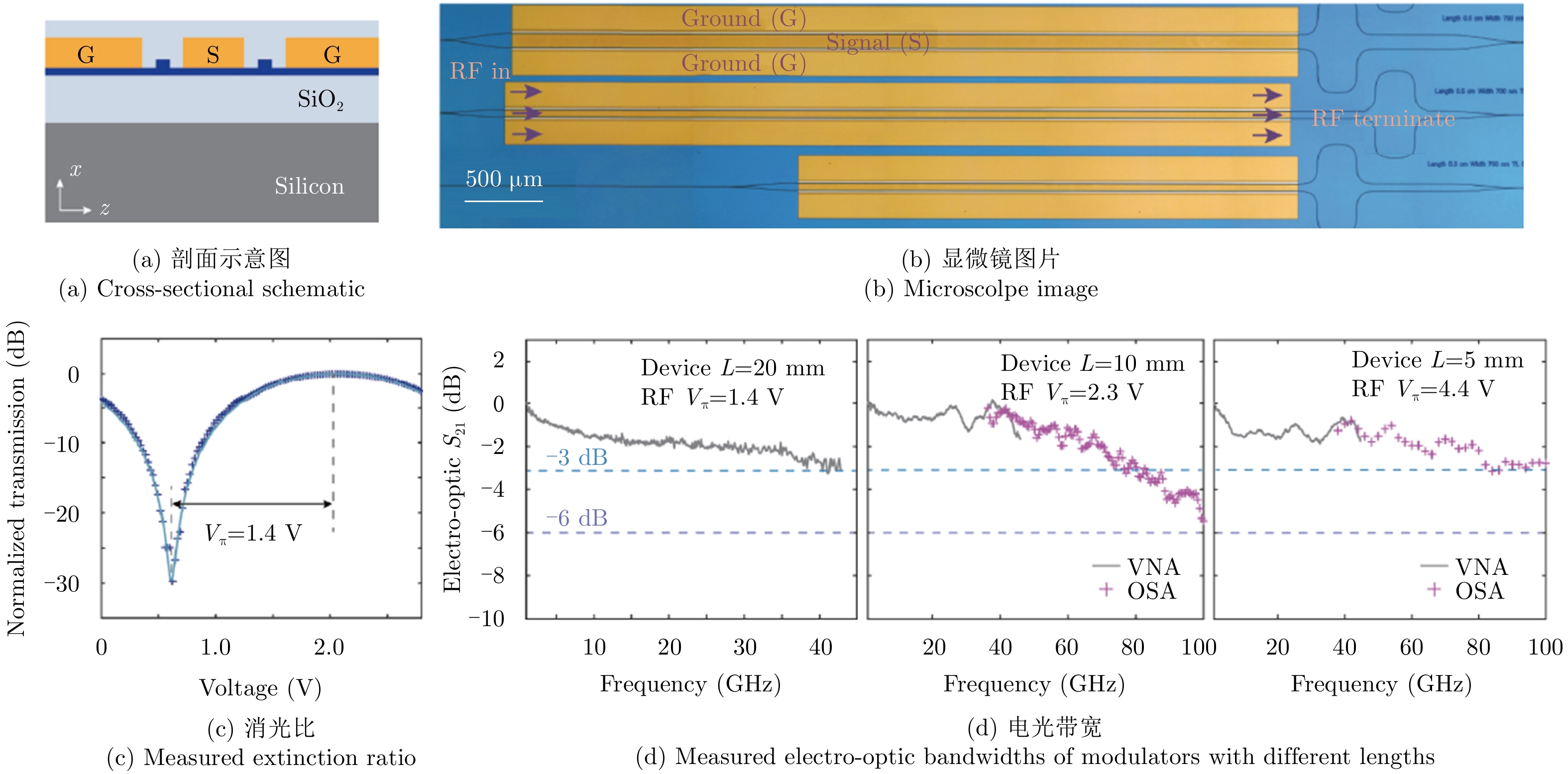
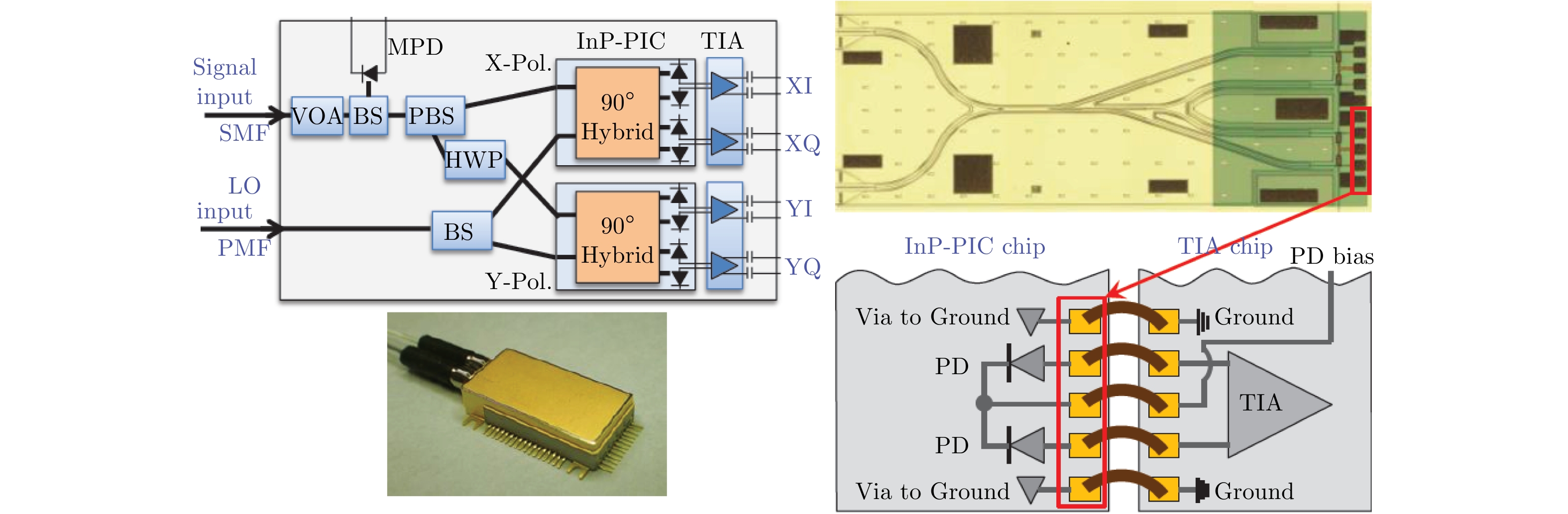
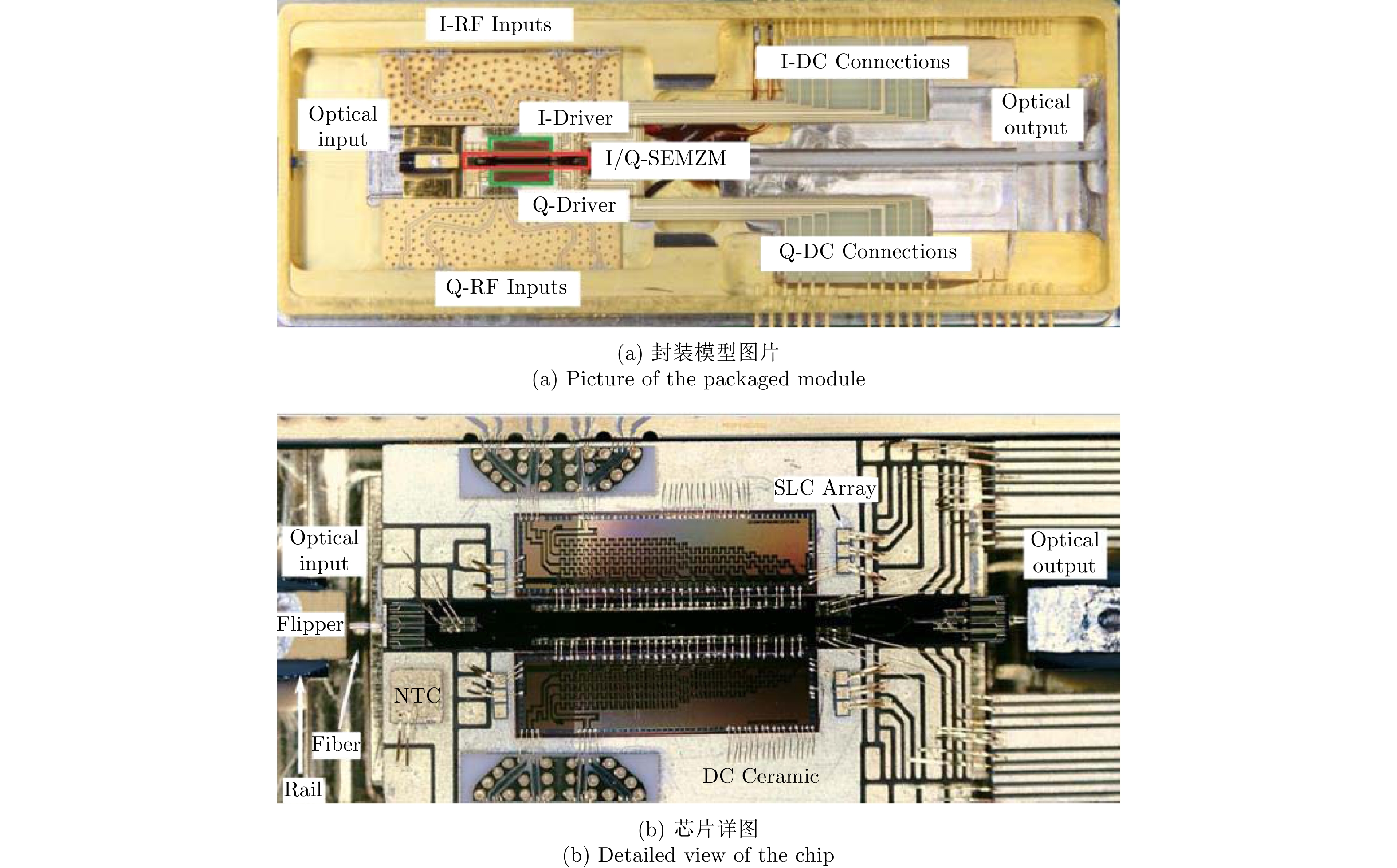
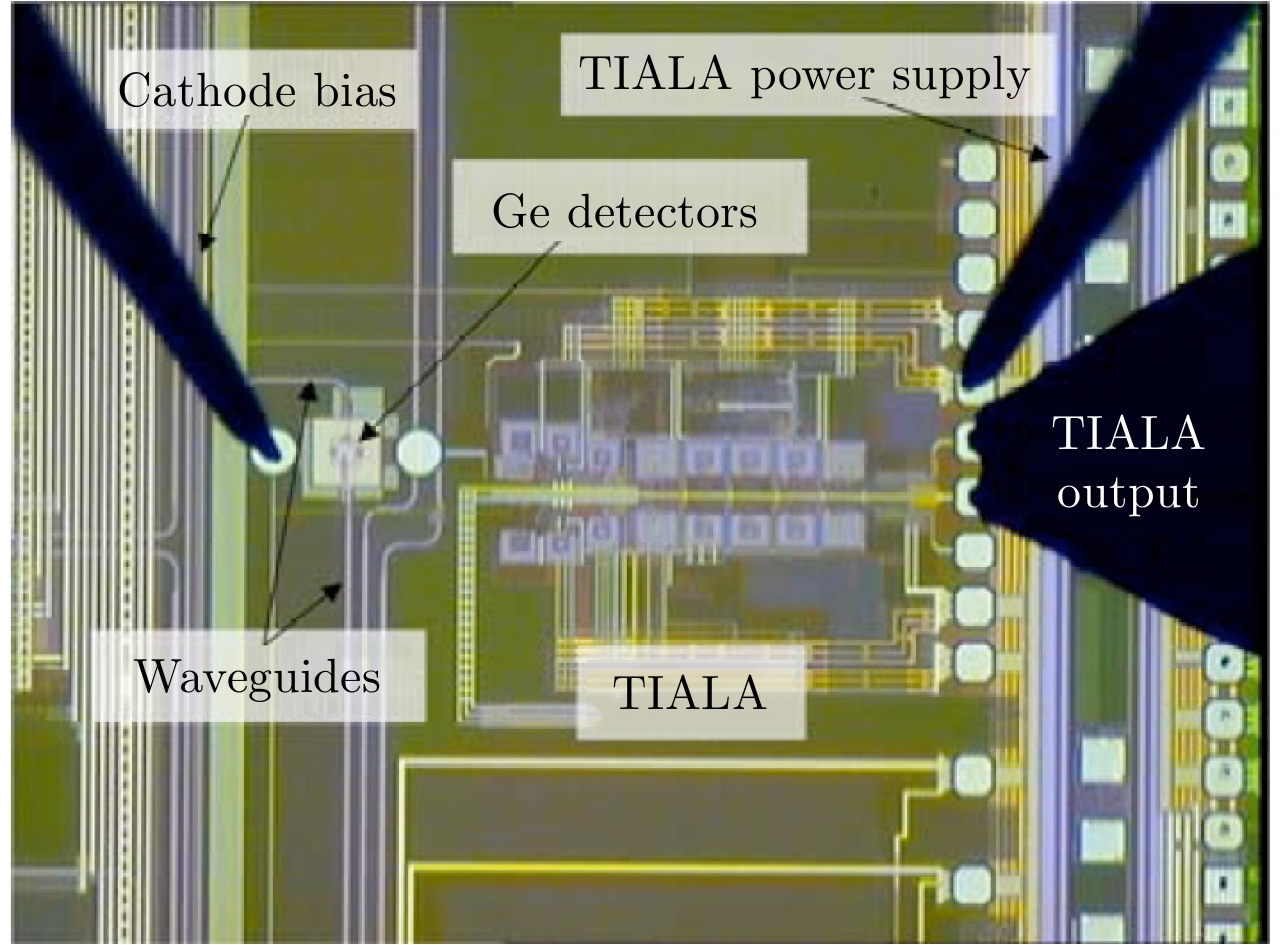
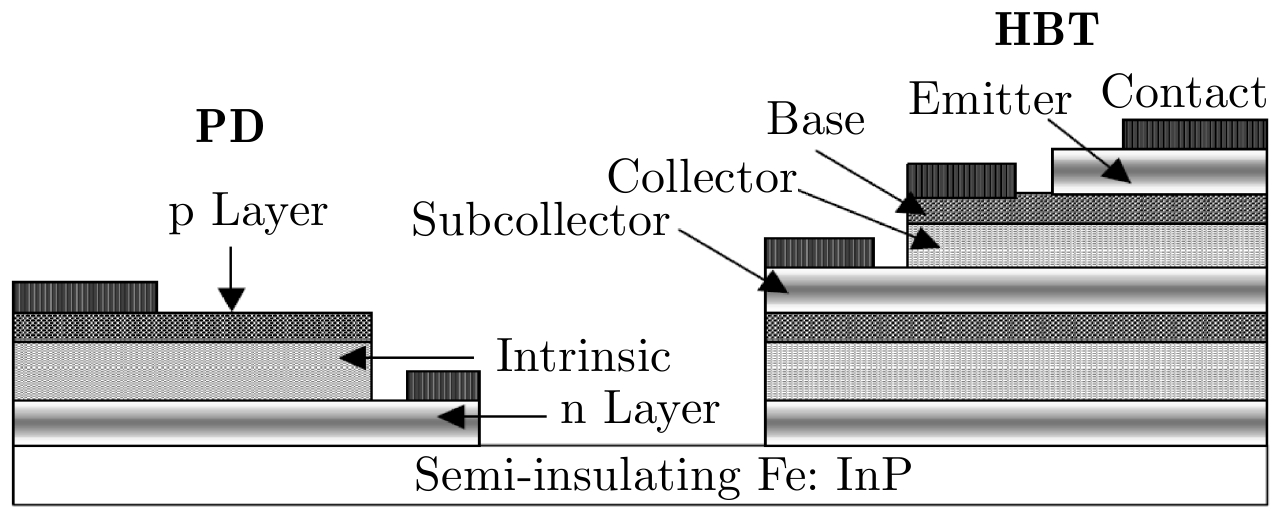
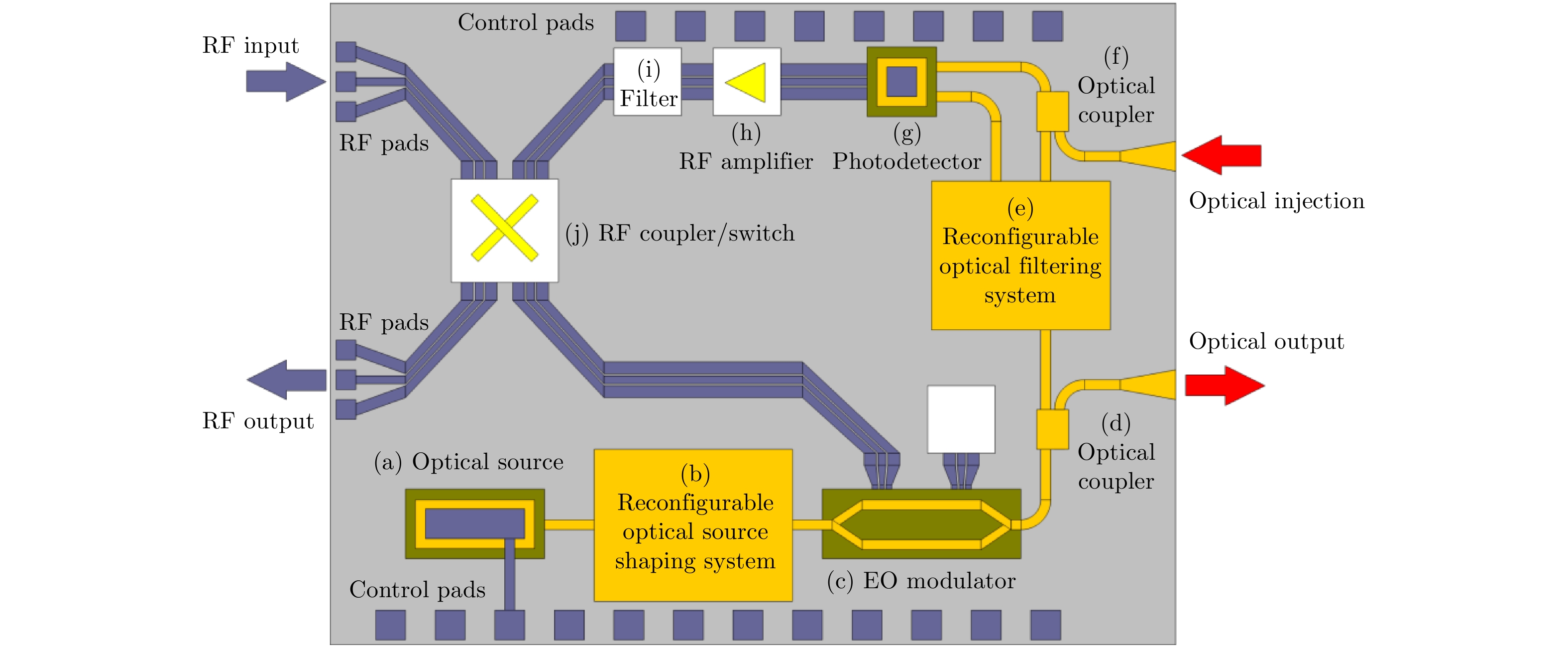
微波光子集成芯片技术是微波光子雷达的重要支撑技术,不仅可以实现器件的多功能化,缩小微波光子雷达的体积,还可以大大提升微波光子雷达的稳定性与可靠性。该文介绍了目前常用的InP基、Si基和铌酸锂基等材料体系及其异质异构集成的光子集成芯片技术和可用于微波光子混合集成的光电集成芯片技术,并展望了未来发展趋势。 微波光子集成芯片技术是微波光子雷达的重要支撑技术,不仅可以实现器件的多功能化,缩小微波光子雷达的体积,还可以大大提升微波光子雷达的稳定性与可靠性。该文介绍了目前常用的InP基、Si基和铌酸锂基等材料体系及其异质异构集成的光子集成芯片技术和可用于微波光子混合集成的光电集成芯片技术,并展望了未来发展趋势。
微波光子集成芯片技术是微波光子雷达的重要支撑技术,不仅可以实现器件的多功能化,缩小微波光子雷达的体积,还可以大大提升微波光子雷达的稳定性与可靠性。该文介绍了目前常用的InP基、Si基和铌酸锂基等材料体系及其异质异构集成的光子集成芯片技术和可用于微波光子混合集成的光电集成芯片技术,并展望了未来发展趋势。 微波光子集成芯片技术是微波光子雷达的重要支撑技术,不仅可以实现器件的多功能化,缩小微波光子雷达的体积,还可以大大提升微波光子雷达的稳定性与可靠性。该文介绍了目前常用的InP基、Si基和铌酸锂基等材料体系及其异质异构集成的光子集成芯片技术和可用于微波光子混合集成的光电集成芯片技术,并展望了未来发展趋势。










 微信 | 公众平台
微信 | 公众平台 

