
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
-
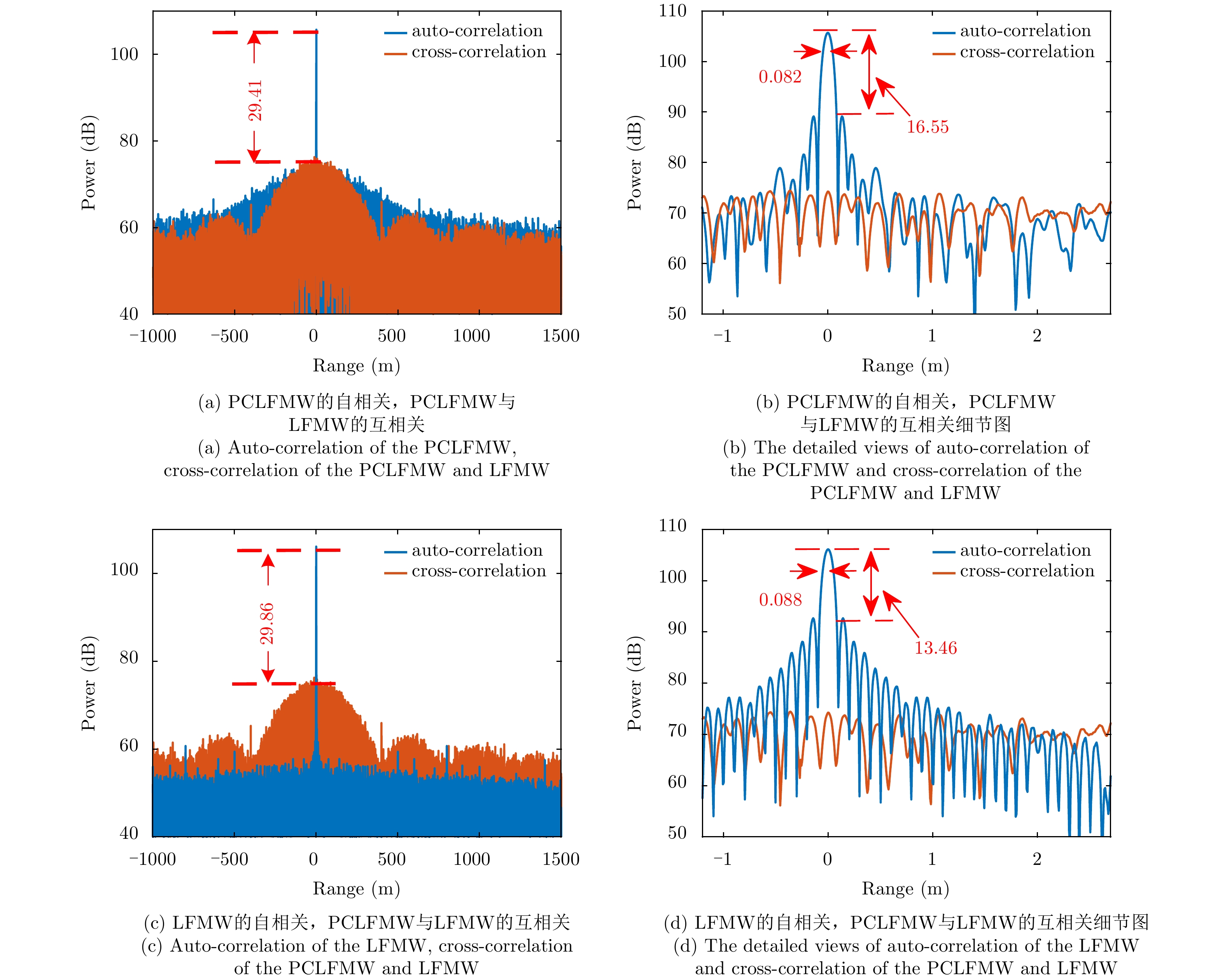
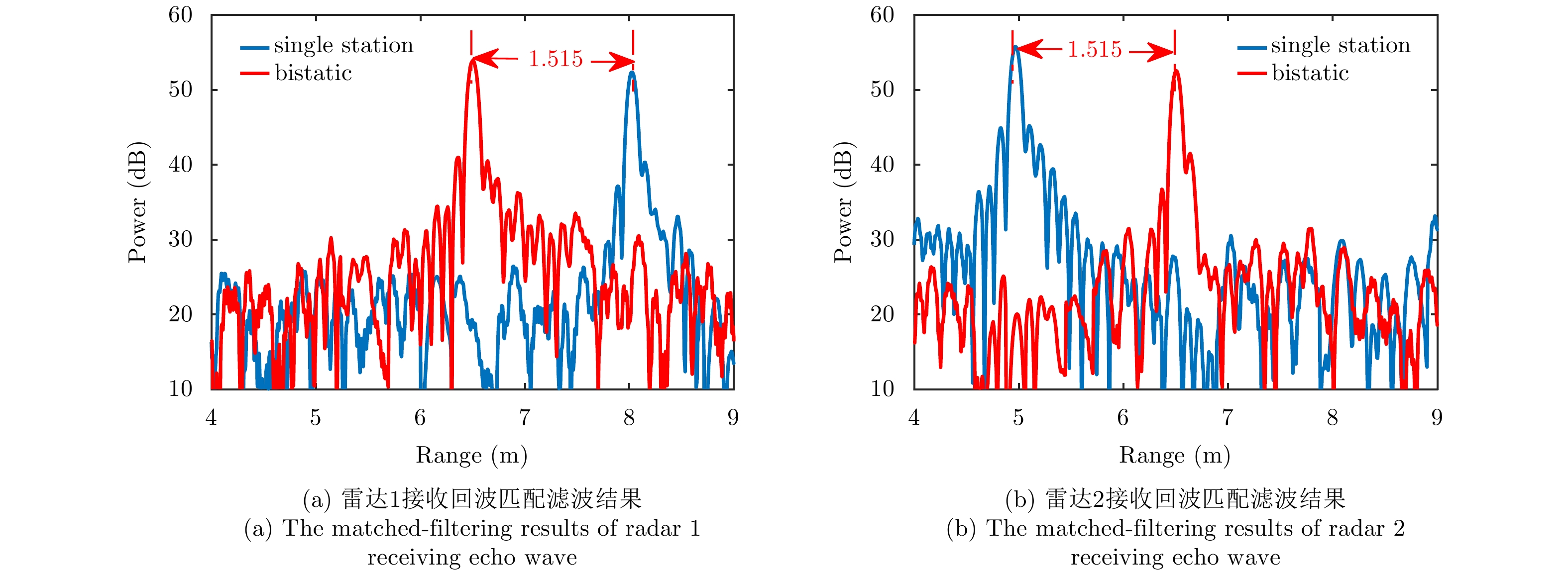
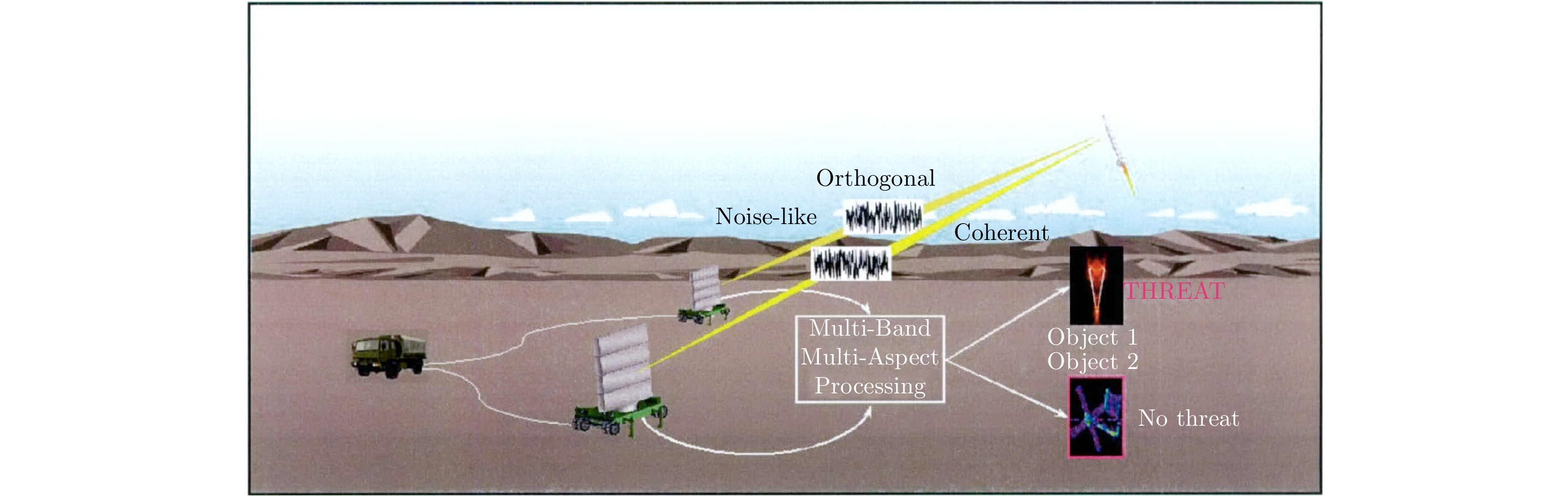
摘要: 分布式相参孔径雷达(DCAR)是利用多个空间分离的天线孔径,向同一区域辐射信号,实现空间电磁波相参合成的雷达系统,具有系统灵活、探测分辨力高、威力大、成本低等优势。结合微波光子技术在宽带信号产生、传输、处理等多方面的优势,可以使DCAR的性能得以充分发挥。该文介绍了清华大学在基于微波光子原理的高分辨DCAR方面的成果,借助微波光子技术,在接收相参模式下,产生了8.5~11.5 GHz, 0.5 Gbps编码速率的宽带正交调相线性调频波,距离分辨率优于0.05 m、正交性接近30 dB。在全相参模式下,发射波形可灵活切换为宽带相参线性调频波,实现全相参合成。系统产生的波形能满足DCAR各个工作模式的波形需求。实验中,在两部雷达的参与下,通过全相参合成,获得了8.3 dB的信噪比增益。Abstract: Distributed Coherent Aperture Radar (DCAR) utilizes multiple separated antenna apertures to emit signals in the same space area, realizing spatial coherent synthesis of electro-magnetic waves. Such a flexible radar system has advantages such as higher resolution, greater radar power, and lower cost. Combined with microwave photonic technologies, which have merits in wideband signal generation, transmission and procession, the DCAR has a comprehensive and better performance. This paper introduces a microwave photonics-based high-resolution distributed coherent aperture radar that was proposed by researchers of Tsinghua University. Taking advantages of microwave photonic technology, a group of wideband orthogonal phase-coded linear frequency modulation waves is generated in the coherence-on-receive mode, with the frequency ranging from 8.5 GHz to 11.5 GHz, all with phase coding under a bit rate of 0.5 Gbps. The orthogonality of the signals is nearly 30 dB, and the range resolution is better than 0.05 m. While in the full coherence mode, the transmitted waveforms can be flexibly switched to the wideband coherent linear frequency modulation waves, and the full coherent synthesis can be realized. The waveforms generated by the proposed system can meet the waveform requirements of the DCAR in different operation modes. In the experiment, full coherence is achieved with two sets of radars, resulting a signal- to-noise ratio gain of 8.3 dB.
-
Key words:
- Microwave photonics /
- Distributed coherent aperture /
- Radar
-

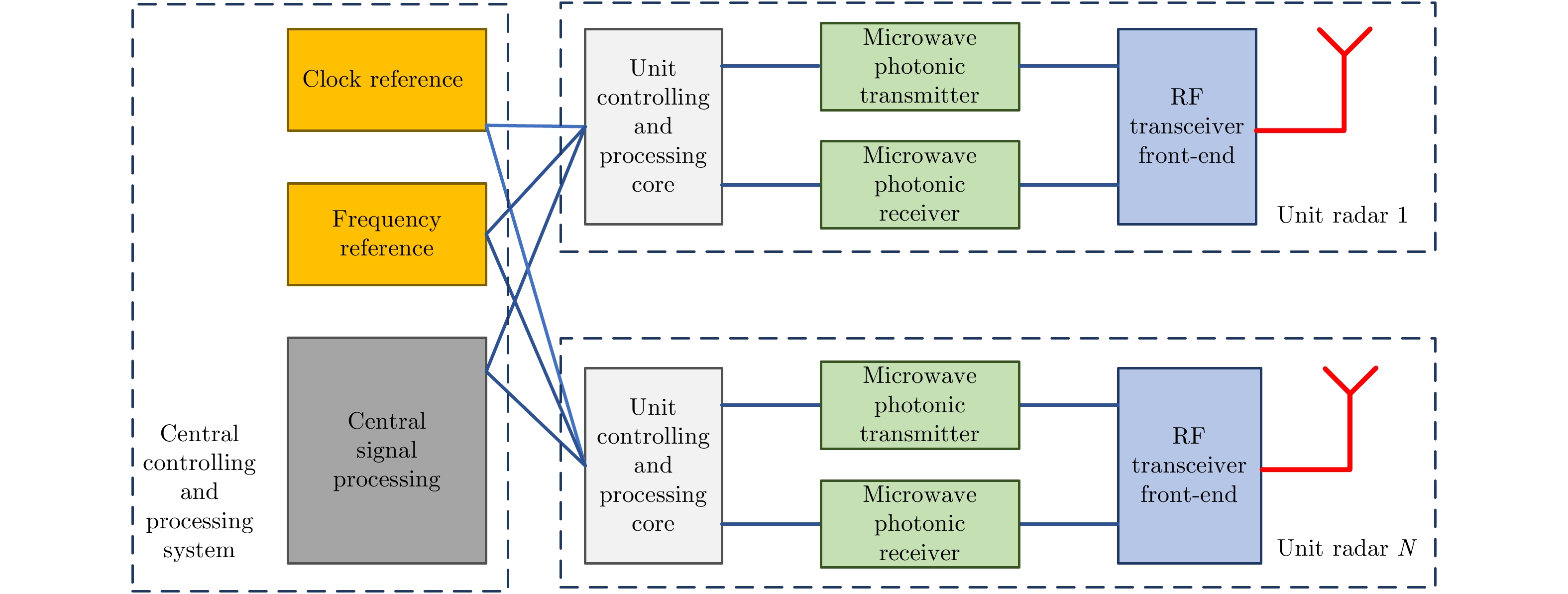
图 2 基于微波光子学原理的DCAR总体架构
Figure 2. The overall framework of the microwave photonics-based DCAR
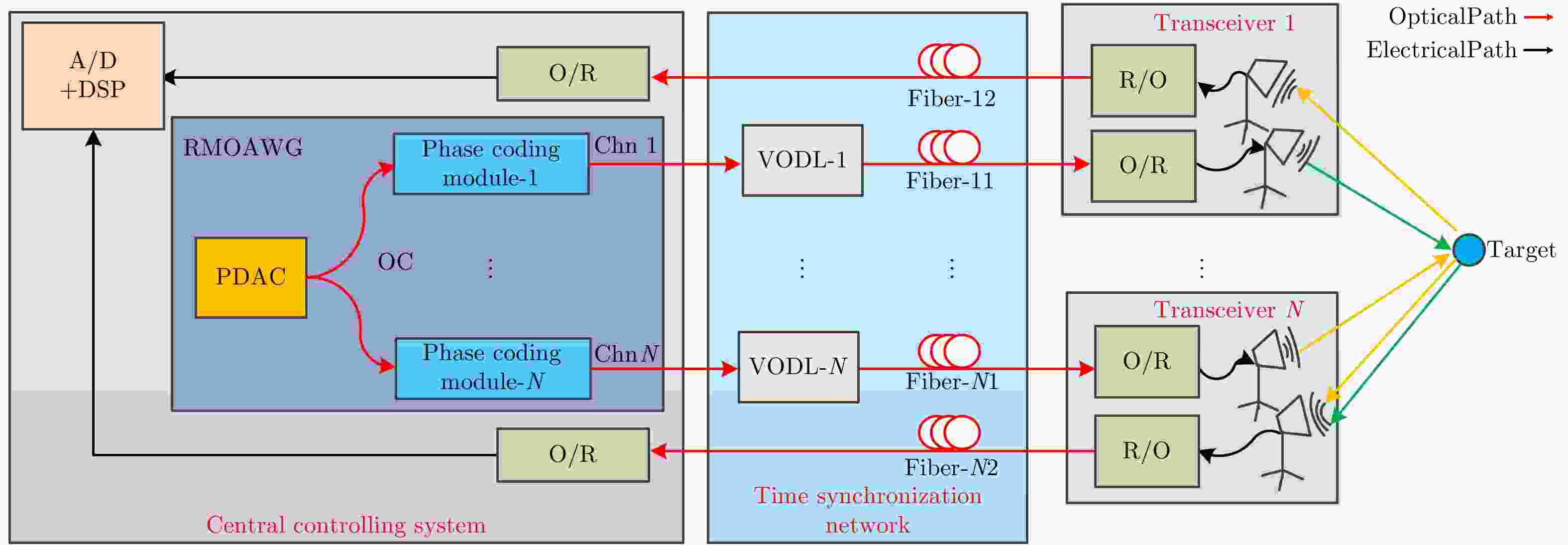
图 3 基于光子学的宽带DCAR系统
Figure 3. Schematic diagram of the photonic-based wideband DCAR system

图 5 PCLFMW与LFMW的自相关和互相关结果
Figure 5. Auto-correlation and cross-correlation of the PCLFMW and LFMW
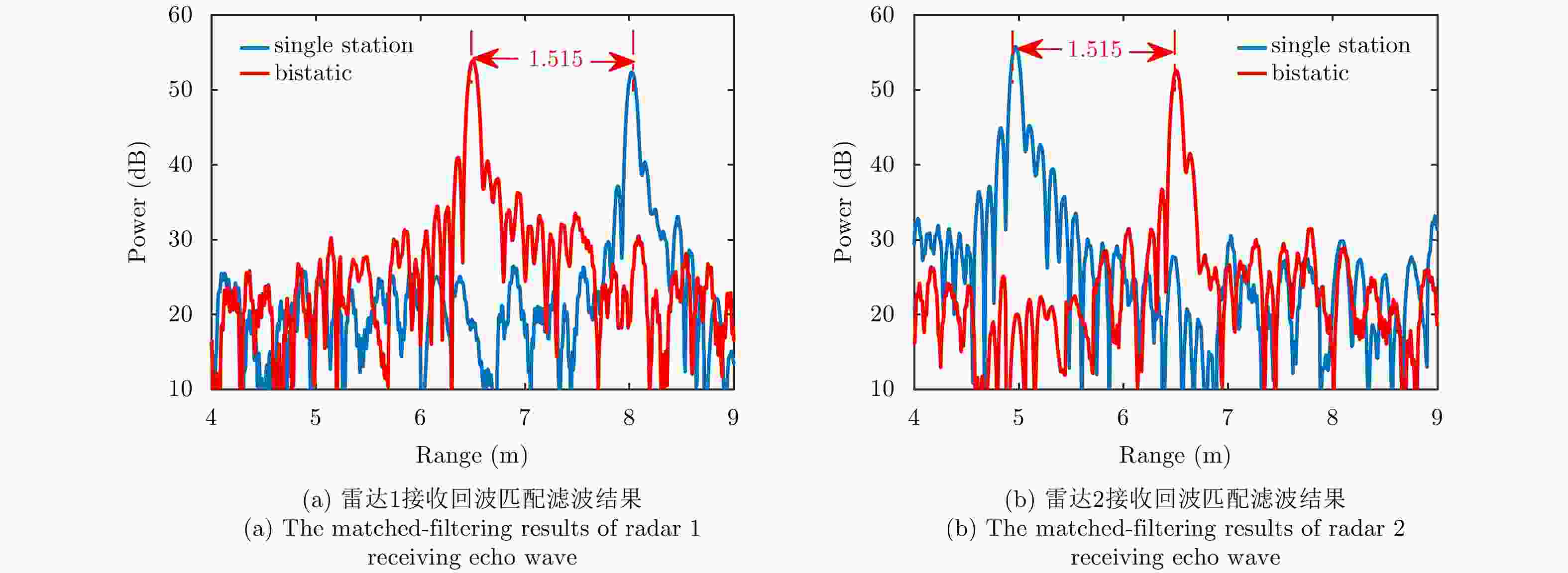
图 6 雷达1和雷达2接收回波匹配滤波结果
Figure 6. The matched-filtering results of radar 1 and radar 2 receiving echo wave
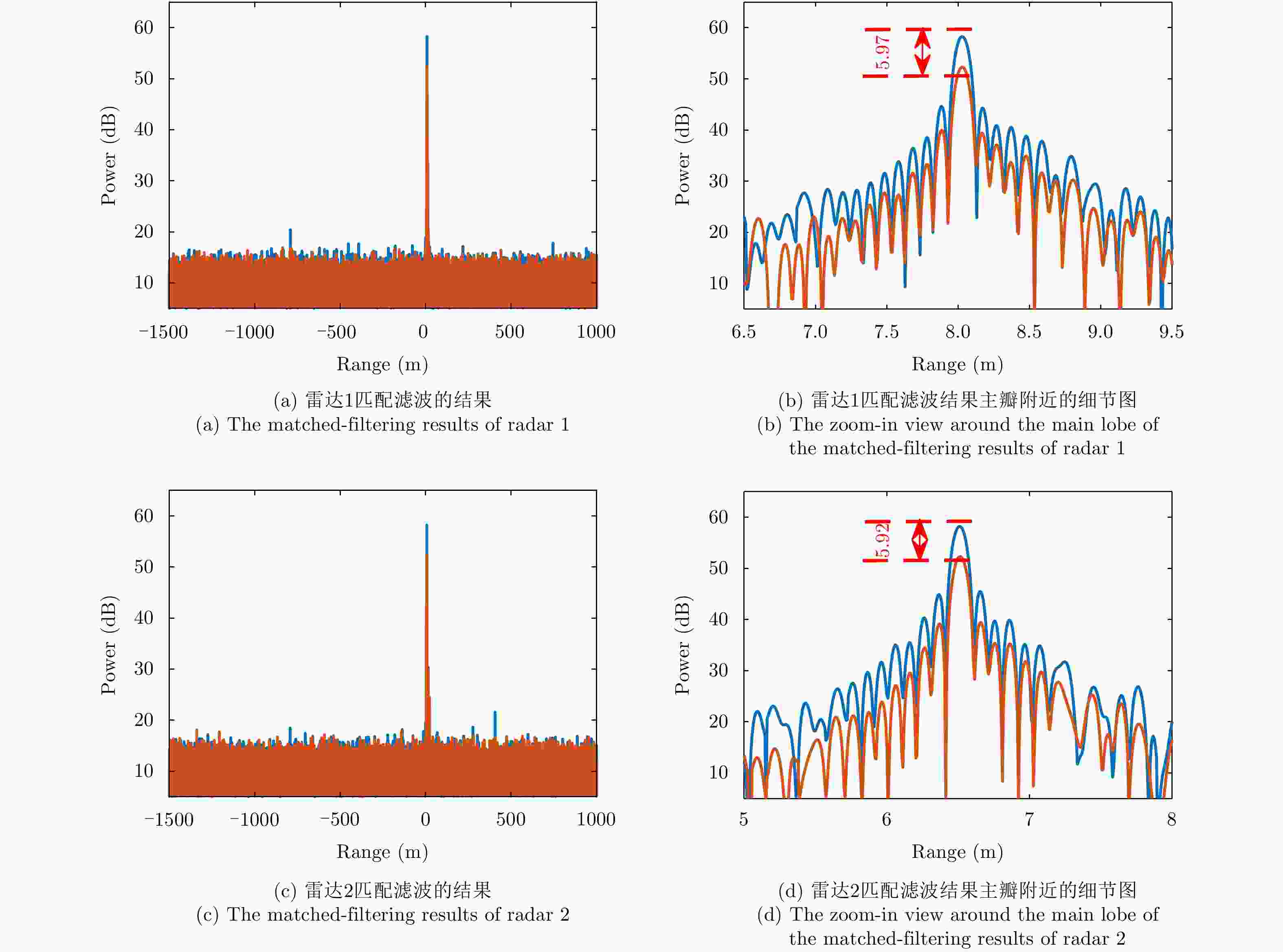
图 7 雷达1和雷达2匹配滤波的结果(蓝色/红色:发射相参模式/单发单收模式)
Figure 7. The matched-filtering results of radar 1 and radar 2 (Blue/red line: coherence-on transmit mode/monostatic mode)
-
[1] COUTTS S, CUOMO K, MCHARG J, et al. Distributed coherent aperture measurements for next generation BMD radar[C]. Proceedings of the 4th IEEE Workshop on IEEE Sensor Array and Multichannel Processing, Waltham, MA, USA, 2006: 390–393. doi: 10.1109/SAM.2006.1706161. [2] 张亚婷, 黄志忠. 新体制雷达—分布式孔径相参合成雷达[J]. 火控雷达技术, 2014, 43(2): 43–47. doi: 10.3969/j.issn.1008-8652.2014.02.011ZHANG Yating and HUANG Zhizhong. A new system radar—Distributed aperture coherence-synthesizing radar[J]. Fire Control Radar Technology, 2014, 43(2): 43–47. doi: 10.3969/j.issn.1008-8652.2014.02.011 [3] 殷丕磊. 地基宽带分布式全相参雷达技术研究[D]. [博士论文], 北京理工大学, 2016: 5–12.YIN Pilei. Research on ground-based wideband distributed coherent aperture radar[D]. [Ph.D. dissertation], Beijing Institute of Technology, 2016: 5–12. [4] GAO Hongwei, CAO Zhe, WEN Shuliang, et al. Study on distributed aperture coherence-synthesizing radar with several experiment results[C]. Proceedings of 2011 IEEE CIE International Conference on Radar, Chengdu, China, 2011: 84–86. doi: 10.1109/CIE-Radar.2011.6159481. [5] 曹哲, 柴振海, 高红卫, 等. 分布式阵列相参合成雷达技术研究与试验[J]. 现代防御技术, 2012, 40(4): 1–11. doi: 10.3969/j.issn.1009-086x.2012.04.001CAO Zhe, CHAI Zhenhai, GAO Hongwei, et al. Technology and tests on distributed aperture coherence-synthesizing radar[J]. Modern Defence Technology, 2012, 40(4): 1–11. doi: 10.3969/j.issn.1009-086x.2012.04.001 [6] CUOMO K M, COUTTS S D, MCHARG J C, et al. Wideband aperture coherence processing for next generation radar (NexGen)[R]. Lexington: MIT Lincoln Laboratory, 2004. [7] MIT Lincoln Laboratory. MIT Lincoln Laboratory 2008 annual report[EB/OL]. http://www.ll.mit.edu. [8] CZERWINSKI M G and USOFF J M. Development of the haystack ultrawideband satellite imaging radar[J]. Lincoln Laboratory Journal, 2014, 21(1): 28–44. [9] 高红卫, 曹哲, 鲁耀兵. 分布式阵列相参合成雷达基本研究与原理验证[C]. 第十二届全国雷达学术年会论文集, 武汉, 中国, 2012: 129–134.GAO Hongwei, CAO Zhe, and LU Yaobing. Fundamental Research and principle verification on distributed aperture coherence-synthesizing radar[C]. Proceedings of the 12th National Annual Conference on Radar, Wuhan, China, 2012: 129–134. [10] GAO Hongwei, CAO Zhe, LU Yaobing, et al. Development of distributed aperture coherence - synthetic radar technology[C]. Proceedings of 2013 IET International Radar Conference, Xi’an, China, 2013: 1–6. doi: 10.1049/cp.2013.0496. [11] 鲁耀兵, 张履谦, 周荫清, 等. 分布式阵列相参合成雷达技术研究[J]. 系统工程与电子技术, 2012, 35(8): 1657–1662. doi: 10.3969/j.issn.1001-506X.2013.08.12LU Yaobing, ZHANG Lüqian, ZHOU Yinqing, et al. Study on distributed aperture coherence-synthetic radar technology[J]. Systems Engineering and Electronics, 2012, 35(8): 1657–1662. doi: 10.3969/j.issn.1001-506X.2013.08.12 [12] 鲁耀兵, 高红卫, 周宝亮. 分布式孔径相参合成雷达技术[J]. 雷达学报, 2017, 6(1): 55–64. doi: 10.12000/JR17014LU Yaobing, GAO Hongwei, and ZHOU Baoliang. Distributed aperture coherence-synthetic radar technology[J]. Journal of Radars, 2017, 6(1): 55–64. doi: 10.12000/JR17014 [13] 周宝亮, 周东明, 高红卫, 等. 分布式孔径相参合成雷达系统设计与试验研究[J]. 现代防御技术, 2018, 46(3): 112–119. doi: 10.3969/j.issn.1009-086x.2018.03.017ZHOU Baoliang, ZHOU Dongming, GAO Hongwei, et al. Research on the distributed aperture coherence-synthetic radar system design and experiment[J]. Modern Defense Technology, 2018, 46(3): 112–119. doi: 10.3969/j.issn.1009-086x.2018.03.017 [14] YIN Pilei, YANG Xiaopeng, LIU Quanhua, et al. Wideband distributed coherent aperture radar[C]. 2014 IEEE Radar Conference, Cincinnati, OH, USA, 2014: 1114–1117. doi: 10.1109/RADAR.2014.6875762. [15] 殷丕磊, 闫路, 张宗傲, 等. 基于频率步进的宽带分布式全相参雷达[J]. 北京理工大学学报, 2016, 36(7): 749–754. doi: 10.15918/j.tbit1001-0645.2016.07.017YIN Pilei, YAN Lu, ZHANG Zongao, et al. Wideband distributed coherent aperture radar based on step frequency signal[J]. Transactions of Beijing Institute of Technology, 2016, 36(7): 749–754. doi: 10.15918/j.tbit1001-0645.2016.07.017 [16] 王锐. 分布式全相参雷达参数估计及ISAR成像方法研究[D]. [博士论文], 北京理工大学, 2015: 34–62.WANG Rui. Research on parameter estimation and ISAR imaging for distributed coherent radar[D]. [Ph.D. dissertation], Beijing Institute of Technology, 2015: 34–62. [17] ZENG Tao, YIN Pilei, and LIU Quanhua. Wideband distributed coherent aperture radar based on stepped frequency signal: Theory and experimental results[J]. IET Radar, Sonar & Navigation, 2016, 10(4): 672–688. doi: 10.1049/iet-rsn.2015.0221 [18] 殷丕磊, 杨小鹏, 曾涛. 分布式全相参雷达的相位差跟踪技术[J]. 信号处理, 2013, 29(3): 313–318. doi: 10.3969/j.issn.1003-0530.2013.03.004YIN Pilei, YANG Xiaopeng, and ZENG Tao. Tracking technology of phase difference for distributed aperture coherent radar[J]. Journal of Signal Processing, 2013, 29(3): 313–318. doi: 10.3969/j.issn.1003-0530.2013.03.004 [19] 曾涛, 殷丕磊, 杨小鹏, 等. 分布式全相参雷达系统时间与相位同步方案研究[J]. 雷达学报, 2013, 2(1): 105–110. doi: 10.3724/SP.J.1300.2013.20104ZENG Tao, YIN Pilei, YANG Xiaopeng, et al. Time and phase synchronization for distributed aperture coherent radar[J]. Journal of Radars, 2013, 2(1): 105–110. doi: 10.3724/SP.J.1300.2013.20104 [20] YANG Xiaopeng, YIN Pilei, and ZENG Tao. Time and phase synchronization for wideband distributed coherent aperture radar[C]. Proceedings of 2013 IET International Radar Conference, Xi’an, China, 2013: 1–5. doi: 10.1049/cp.2013.0241. [21] YIN Pilei, YANG Xiaopeng, ZENG Tao, et al. Robust time synchronization method based on step frequency signal for wideband distributed coherent aperture radar[C]. 2013 IEEE International Symposium on Phased Array Systems and Technology, Waltham, MA, USA, 2013: 383–388. doi: 10.1109/ARRAY.2013.6731859. [22] SUN Peilin, TANG Jun, and TANG Xiaowei. Cramer-Rao bound and signal-to-noise ratio gain in distributed coherent aperture radar[J]. Journal of Systems Engineering and Electronics, 2014, 25(2): 217–225. doi: 10.1109/JSEE.2014.00026 [23] 孙培林, 汤俊, 张宁. 分布式相参雷达相参性能的两种监控算法[J]. 清华大学学报(自然科学版), 2014, 54(4): 419–424. doi: 10.16511/j.cnki.qhdxxb.2014.04.007SUN Peilin, TANG Jun, and ZHANG Ning. Two algorithms for monitoring the coherence performance of distributed coherent radar systems[J]. Journal of Tsinghua University:Science and Technology, 2014, 54(4): 419–424. doi: 10.16511/j.cnki.qhdxxb.2014.04.007 [24] SUN Peilin, TANG Jun, HE Qian, et al. Cramer-Rao bound of parameters estimation and coherence performance for next generation radar[J]. IET Radar, Sonar & Navigation, 2013, 7(5): 553–567. doi: 10.1049/iet-rsn.2012.0139 [25] 刘兴华, 徐振海, 肖顺平. 分布式相参雷达几何布置约束条件[J]. 系统工程与电子技术, 2017, 39(8): 1723–1731. doi: 10.3969/j.issn.1001-506X.2017.08.09LIU Xinghua, XU Zhenhai, and XIAO Shunping. Geometric arrangement constraints of distributed coherent aperture radar[J]. Systems Engineering and Electronics, 2017, 39(8): 1723–1731. doi: 10.3969/j.issn.1001-506X.2017.08.09 [26] LIU Xinghua, XU Zhenhai, LIU Xiang, et al. A clean signal reconstruction approach for coherently combining multiple radars[J]. EURASIP Journal on Advances in Signal Processing, 2018, 2018: 47. doi: 10.1186/s13634-018-0569-1 [27] LIU Xinghua, XU Zhenhai, WANG Luoshengbin, et al. Dual-radar coherently combining: Generalised paradigm and verification example[J]. IET Radar, Sonar & Navigation, 2018. doi: 10.1049/iet-rsn.2018.5089 [28] YANG Xiaopeng, YIN Pilei, ZENG Tao, et al. Phase difference estimation based on orthogonal signals for distributed coherent aperture radar[C]. 2013 International Conference on Radar, Adelaide, SA, Australia, 2013: 576–580. doi: 10.1109/RADAR.2013.6651986. [29] YIN Pilei, YIN Wen, LI Hui, et al. Estimation method of coherent efficiency of distributed coherent aperture radar based on cross-correlation[C]. 2015 IET International Radar Conference, Hangzhou, China, 2015: 36–40. doi: 10.1049/cp.2015.1416. [30] 米闯. 分布式阵列相参合成雷达的发射相参相关研究[D]. [硕士论文], 西安电子科技大学, 2014: 19–50.MI Chuang. Study on transmit coherence of distributed aperture coherence-synthetic radar[D]. [Master dissertation], Xidian University, 2014: 19–50. [31] 李晓波. 宽带分布式相参合成雷达关键问题研究[D]. [硕士论文], 西安电子科技大学, 2014: 5–25.LI Xiaobo. Study on key techniques of wideband distributed aperture coherence-synthesizing radar[D]. [Master dissertation], Xidian University, 2014: 5–25. [32] CAPMANY J and NOVAK D. Microwave photonics combines two worlds[J]. Nature Photonics, 2007, 1(6): 319–330. doi: 10.1038/nphoton.2007.89 [33] YAO Jianping. Microwave photonics[J]. Journal of Lightwave Technology, 2009, 27(3): 314–335. doi: 10.1109/JLT.2008.2009551 [34] GHELFI P, LAGHEZZA F, SCOTTI F, et al. A fully photonics-based coherent radar system[J]. Nature, 2014, 507(7492): 341–345. doi: 10.1038/nature13078 [35] ZOU Weiwen, ZHANG Hao, LONG Xin, et al. All-optical central-frequency-programmable and bandwidth-tailorable radar[J]. Scientific Reports, 2016, 6: 19786. doi: 10.1038/srep19786 [36] ZHANG Fangzheng, GUO Qingshui, and PAN Shilong. Photonics-based real-time ultra-high-range-resolution radar with broadband signal generation and processing[J]. Scientific Reports, 2017, 7: 13848. doi: 10.1038/s41598-017-14306-y [37] XIAO Xuedi, LI Shangyuan, CHEN Boyu, et al. A microwave photonics-based inverse synthetic aperture radar system[C]. Proceedings of 2017 Conference on Lasers and Electro-Optics, San Jose, CA, USA, 2017: JW2A. 144. doi: 10.1364/CLEO_AT.2017.JW2A.144. [38] LI Ruoming, LI Wangzhe, DING Manlai, et al. Demonstration of a microwave photonic synthetic aperture radar based on photonic-assisted signal generation and stretch processing[J]. Optics Express, 2017, 25(13): 14334–14340. doi: 10.1364/OE.25.014334 [39] ZHANG Fangzheng, GUO Qingshui, WANG Ziqian, et al. Photonics-based broadband radar for high-resolution and real-time inverse synthetic aperture imaging[J]. Optics Express, 2017, 25(14): 16274–16281. doi: 10.1364/OE.25.016274 [40] PENG Shaowen, LI Shangyuan, XUE Xiaoxiao, et al. High-resolution W-band ISAR imaging system utilizing a logic-operation-based photonic digital-to-analog converter[J]. Optics Express, 2018, 26(2): 1978–1987. doi: 10.1364/OE.26.001978 [41] ZHANG Fangzheng, GAO Bingdong, and PAN Shilong. Photonics-based MIMO radar with high-resolution and fast detection capability[J]. Optics Express, 2018, 26(13): 17529–17540. doi: 10.1364/OE.26.017529 [42] WANG Anle, WO Jianghai, LUO Xiong, et al. Ka-band microwave photonic ultra-wideband imaging radar for capturing quantitative target information[J]. Optics Express, 2018, 26(16): 20708–20717. doi: 10.1364/OE.26.020708 [43] DENG Nan, LIU Zhangweiyi, WANG Xiaocheng, et al. Distribution of a phase-stabilized 100.02 GHz millimeter-wave signal over a 160 km optical fiber with 4.1×10–17 instability[J]. Optics Express, 2018, 26(1): 339–346. doi: 10.1364/OE.26.000339 [44] RIDGWAY R W, DOHRMAN C L, and CONWAY J A. Microwave photonics programs at DARPA[J]. Journal of Lightwave Technology, 2014, 32(20): 3428–3439. doi: 10.1109/JLT.2014.2326395 [45] ZOU Xihua, LU Bing, PAN Wei, et al. Photonics for microwave measurements[J]. Laser & Photonics Reviews, 2016, 10(5): 711–734. doi: 10.1002/lpor.201600019 [46] XIAO Xuedi, LI Shangyuan, PENG Shaowen, et al. Photonics-based wideband distributed coherent aperture radar system[J]. Optics Express, 2018, 26(26): 33783–33796. doi: 10.1364/OE.26.033783 [47] WU Dexin, XUE Xiaoxiao, LI Shangyuan, et al. Photonic generation of multi-frequency phase-coded microwave signal based on a dual-output Mach-Zehnder modulator and balanced detection[J]. Optics Express, 2017, 25(13): 14516–14523. doi: 10.1364/OE.25.014516 -

 下载:
下载:




计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

