
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公2020年 9卷 第4期
栏目
 上一期
上一期
2020, 9(4): 589-607.
 摘要
摘要 21743KB
21743KB
摘要:
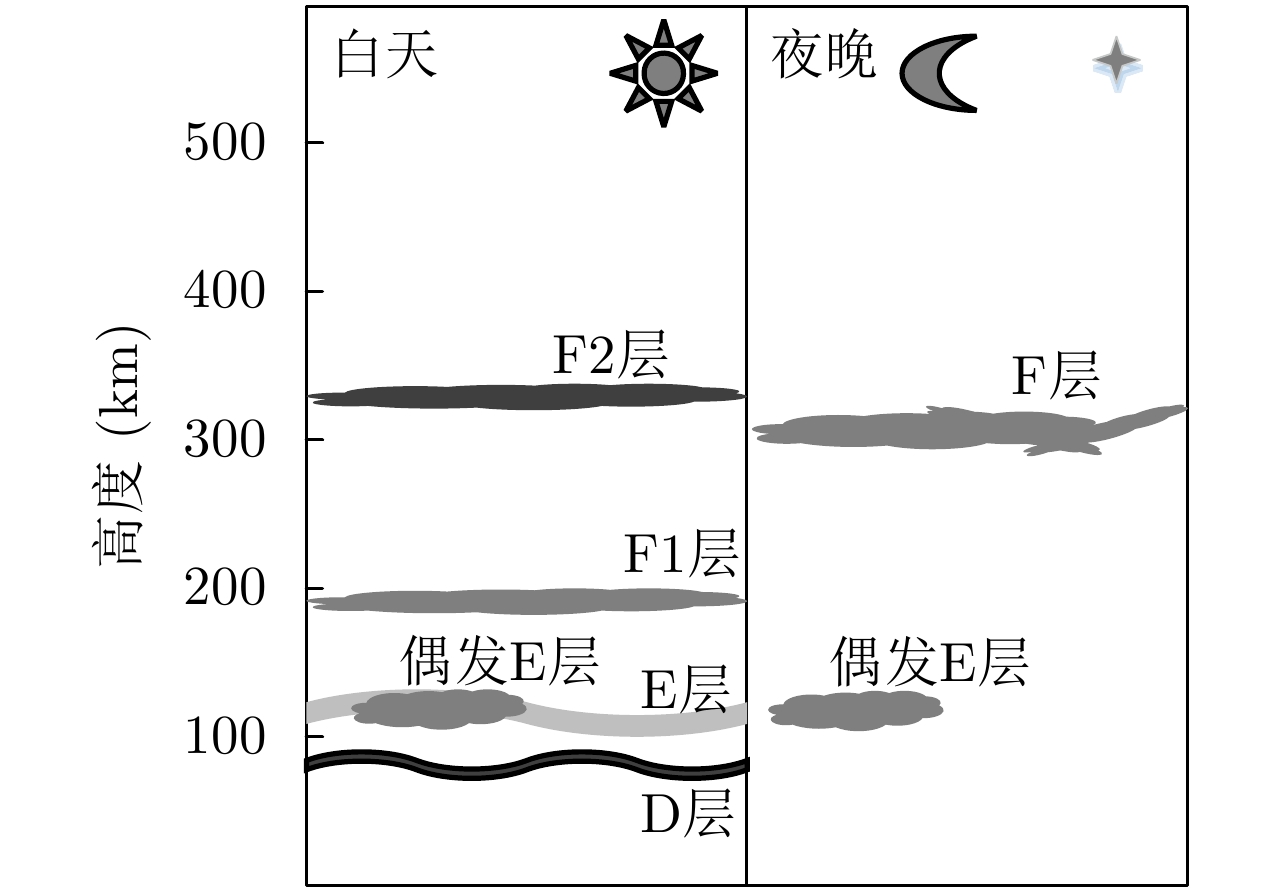
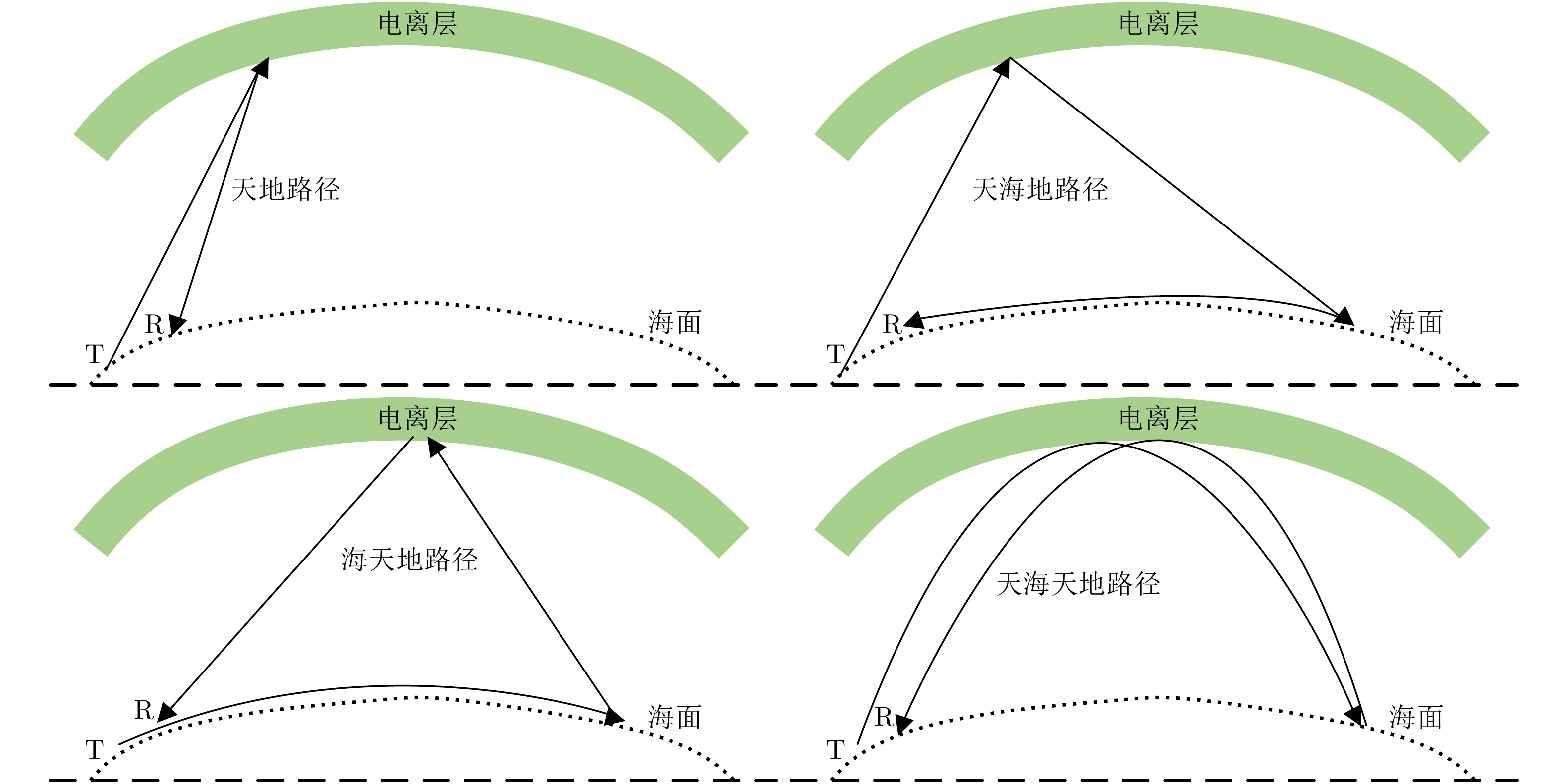
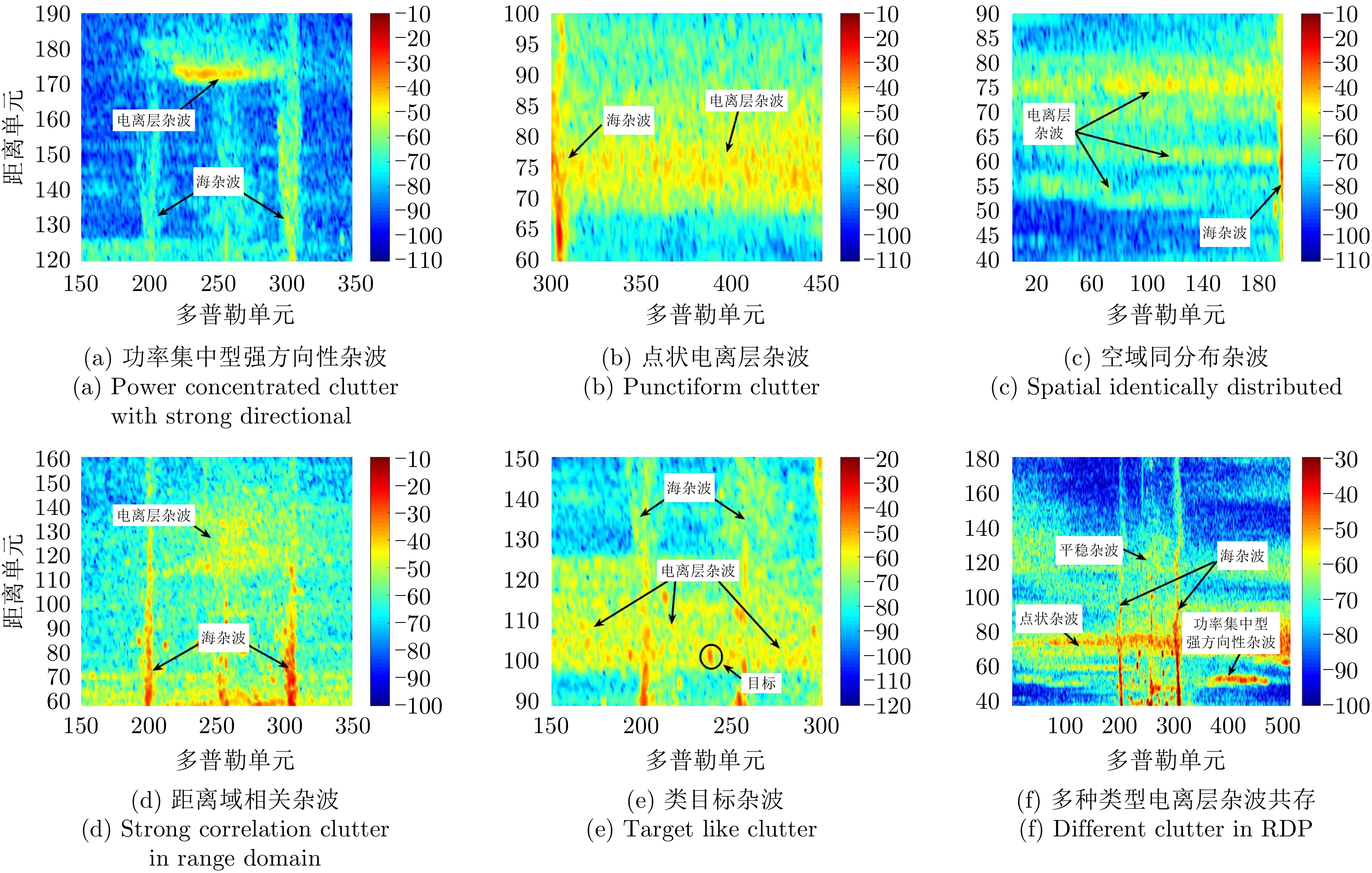
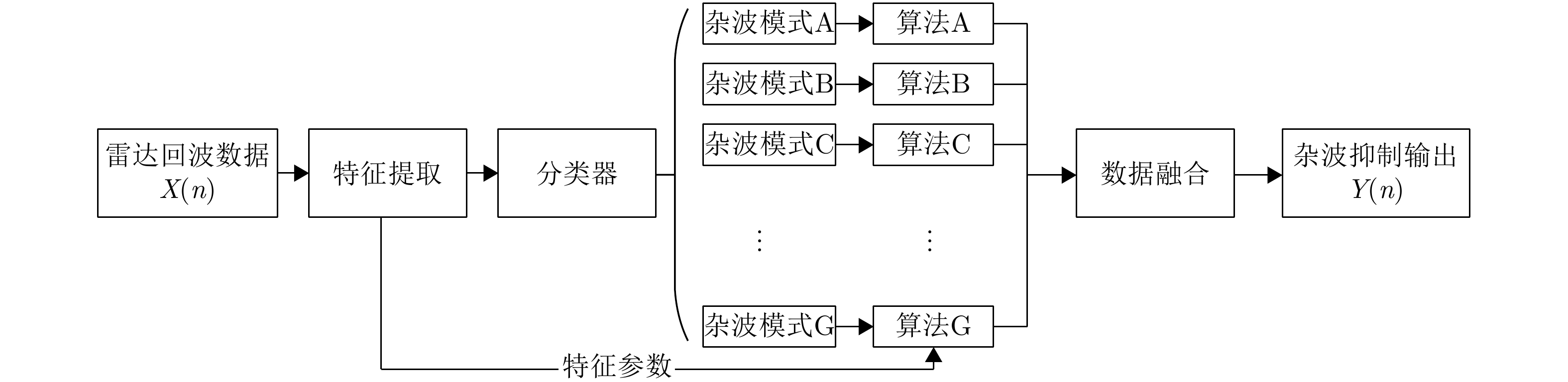
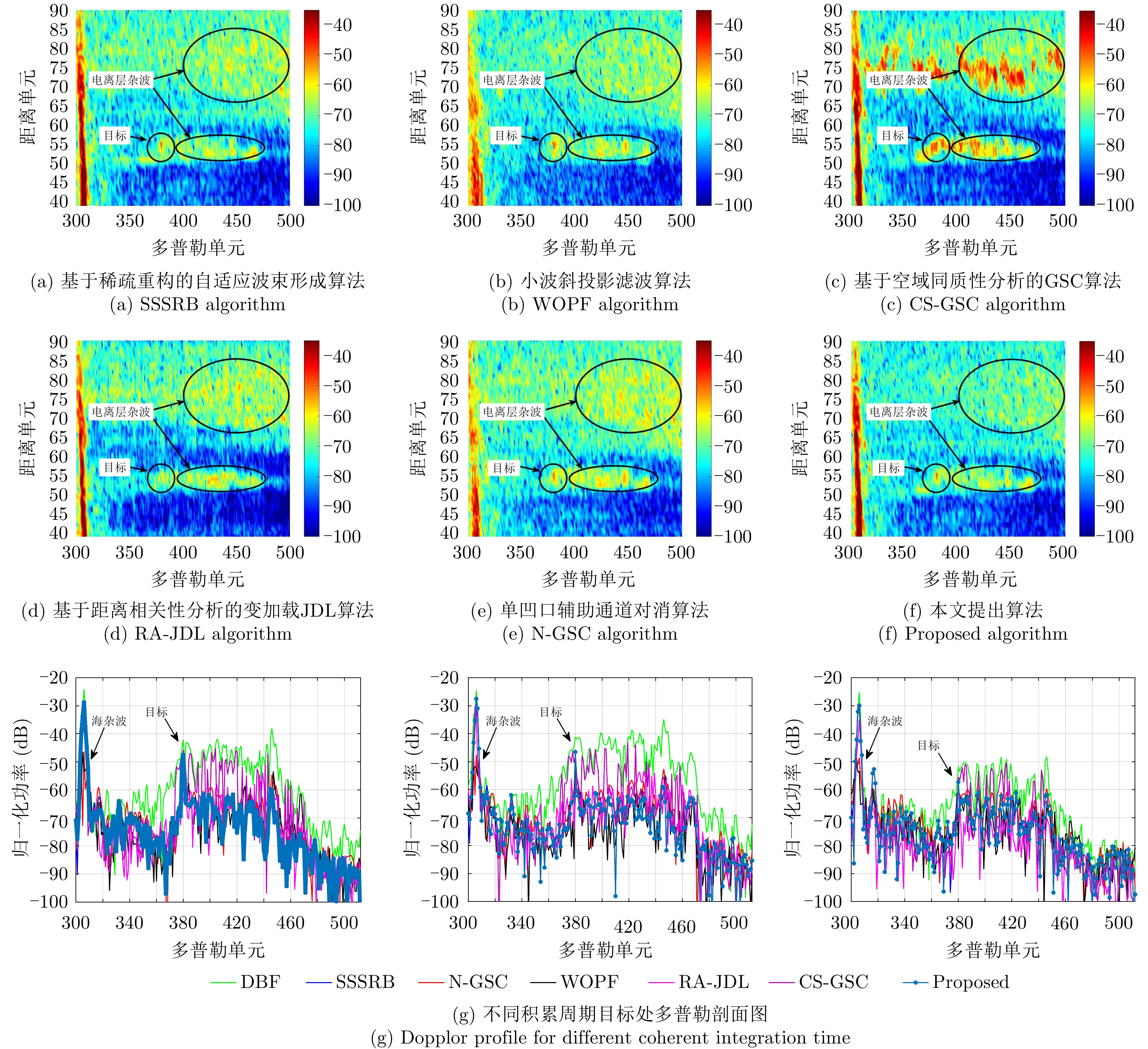
在高频地波超视距雷达系统中,电离层杂波作为一种时变、非均匀、非高斯的复杂杂波,其抑制方法一直是困扰国内外的研究难点。针对传统杂波抑制方法对电离层杂波的处理能力单一、普适性差的问题,该文开展了杂波智能分类抑制处理方法的研究,通过对电离层杂波的成因与特性分析,提出了一种基于杂波聚类与贪婪策略的电离层杂波智能处理方法,对电离层杂波进行分类分情况处理。实验分析表明该方法对电离层杂波的抑制性能优于典型传统算法。 在高频地波超视距雷达系统中,电离层杂波作为一种时变、非均匀、非高斯的复杂杂波,其抑制方法一直是困扰国内外的研究难点。针对传统杂波抑制方法对电离层杂波的处理能力单一、普适性差的问题,该文开展了杂波智能分类抑制处理方法的研究,通过对电离层杂波的成因与特性分析,提出了一种基于杂波聚类与贪婪策略的电离层杂波智能处理方法,对电离层杂波进行分类分情况处理。实验分析表明该方法对电离层杂波的抑制性能优于典型传统算法。
在高频地波超视距雷达系统中,电离层杂波作为一种时变、非均匀、非高斯的复杂杂波,其抑制方法一直是困扰国内外的研究难点。针对传统杂波抑制方法对电离层杂波的处理能力单一、普适性差的问题,该文开展了杂波智能分类抑制处理方法的研究,通过对电离层杂波的成因与特性分析,提出了一种基于杂波聚类与贪婪策略的电离层杂波智能处理方法,对电离层杂波进行分类分情况处理。实验分析表明该方法对电离层杂波的抑制性能优于典型传统算法。 在高频地波超视距雷达系统中,电离层杂波作为一种时变、非均匀、非高斯的复杂杂波,其抑制方法一直是困扰国内外的研究难点。针对传统杂波抑制方法对电离层杂波的处理能力单一、普适性差的问题,该文开展了杂波智能分类抑制处理方法的研究,通过对电离层杂波的成因与特性分析,提出了一种基于杂波聚类与贪婪策略的电离层杂波智能处理方法,对电离层杂波进行分类分情况处理。实验分析表明该方法对电离层杂波的抑制性能优于典型传统算法。






2020, 9(4): 608-621.
摘要:
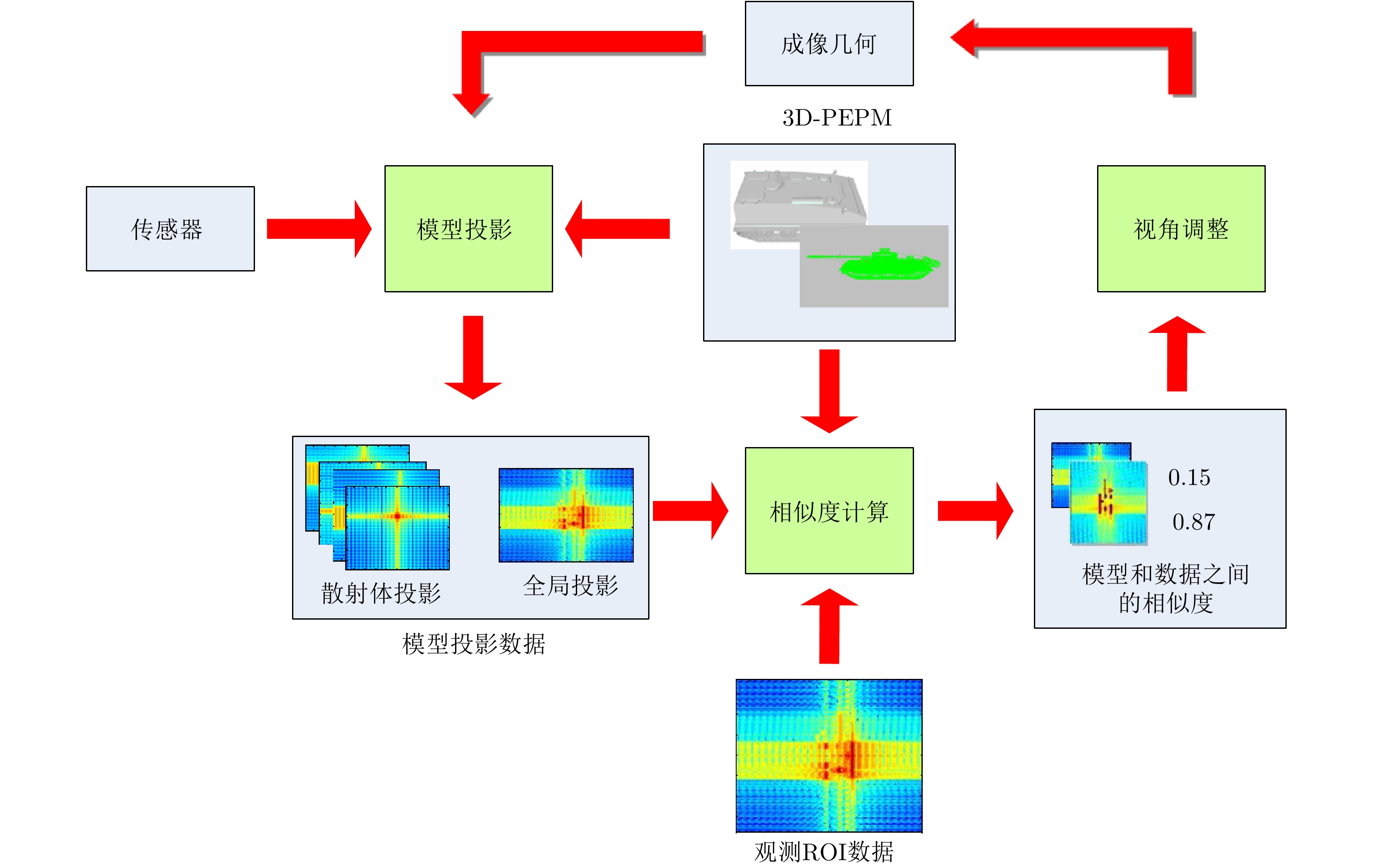
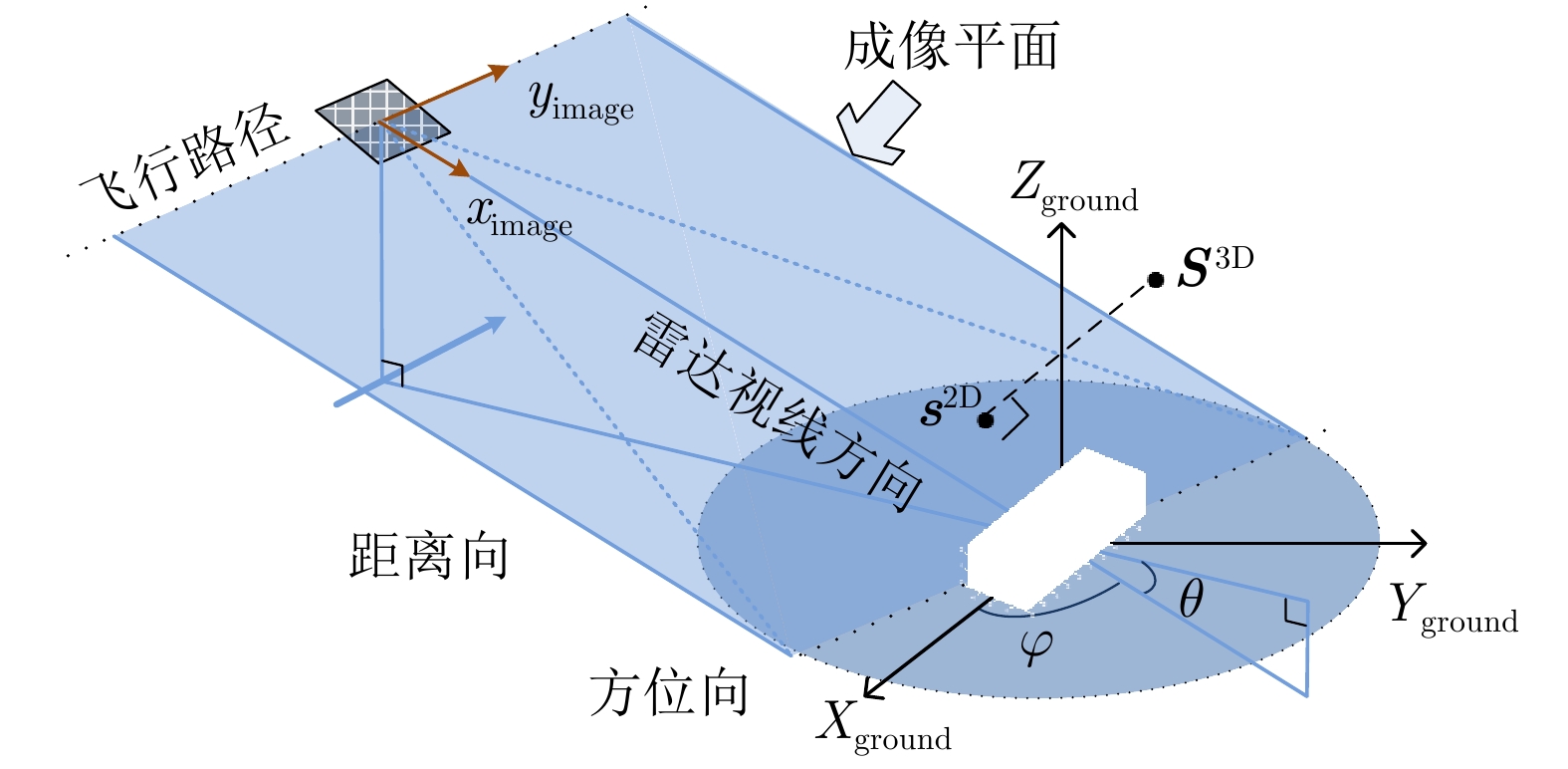
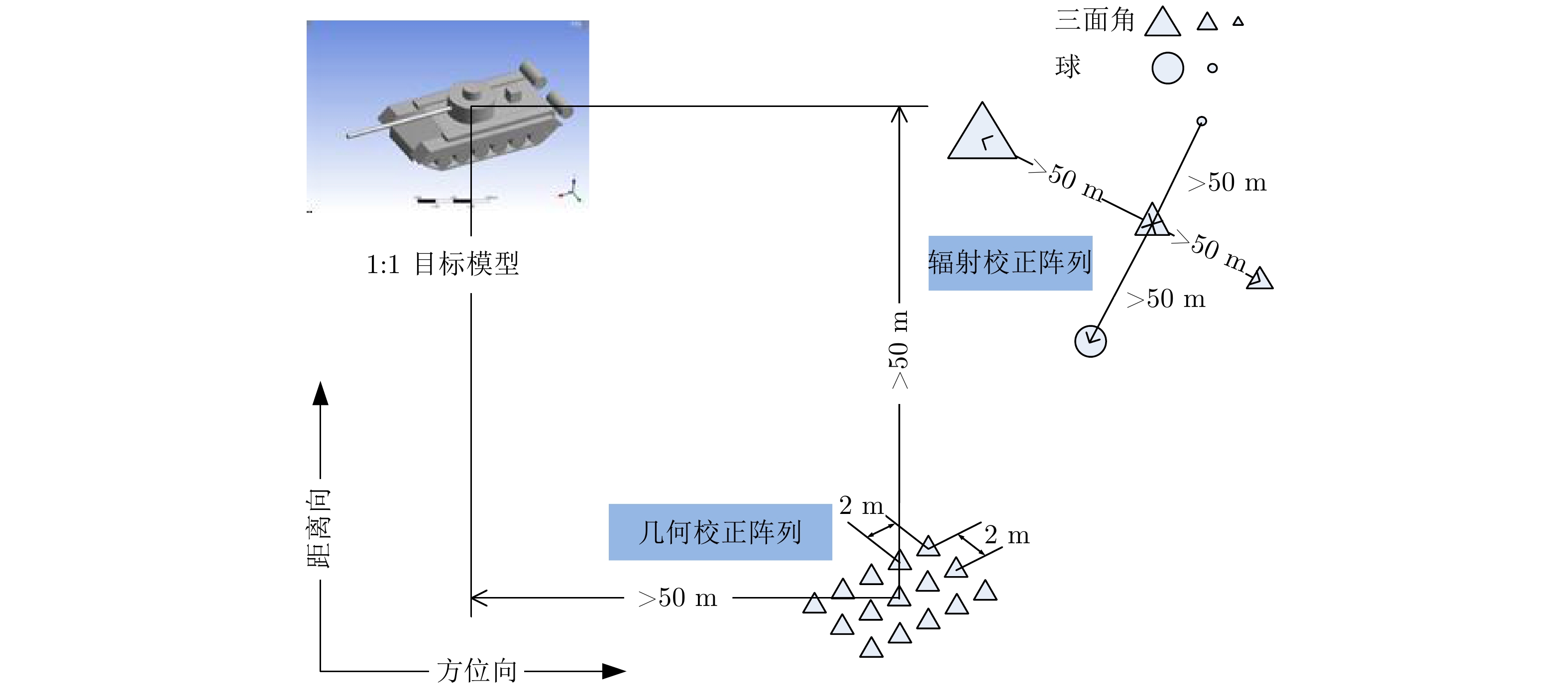
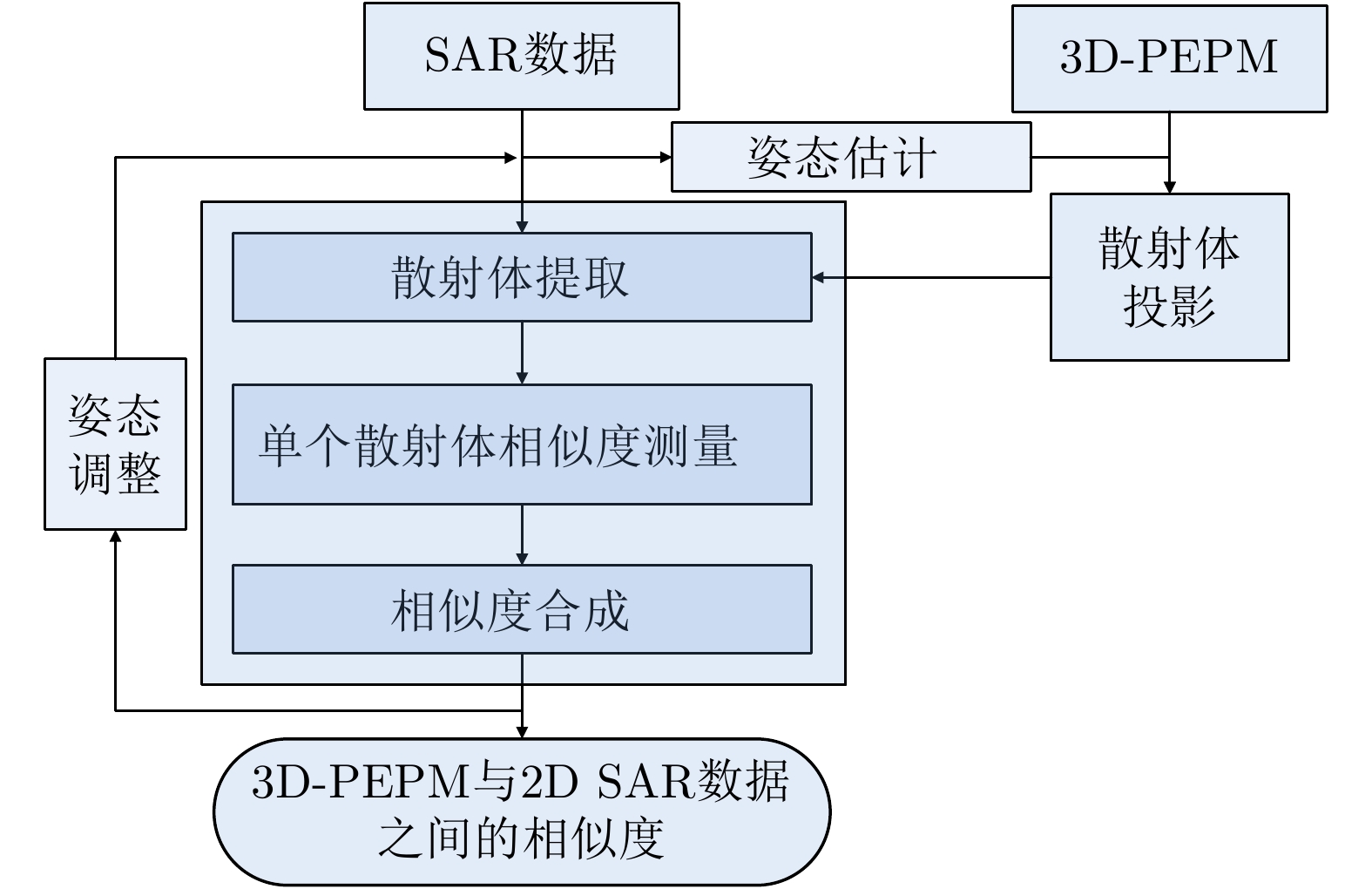
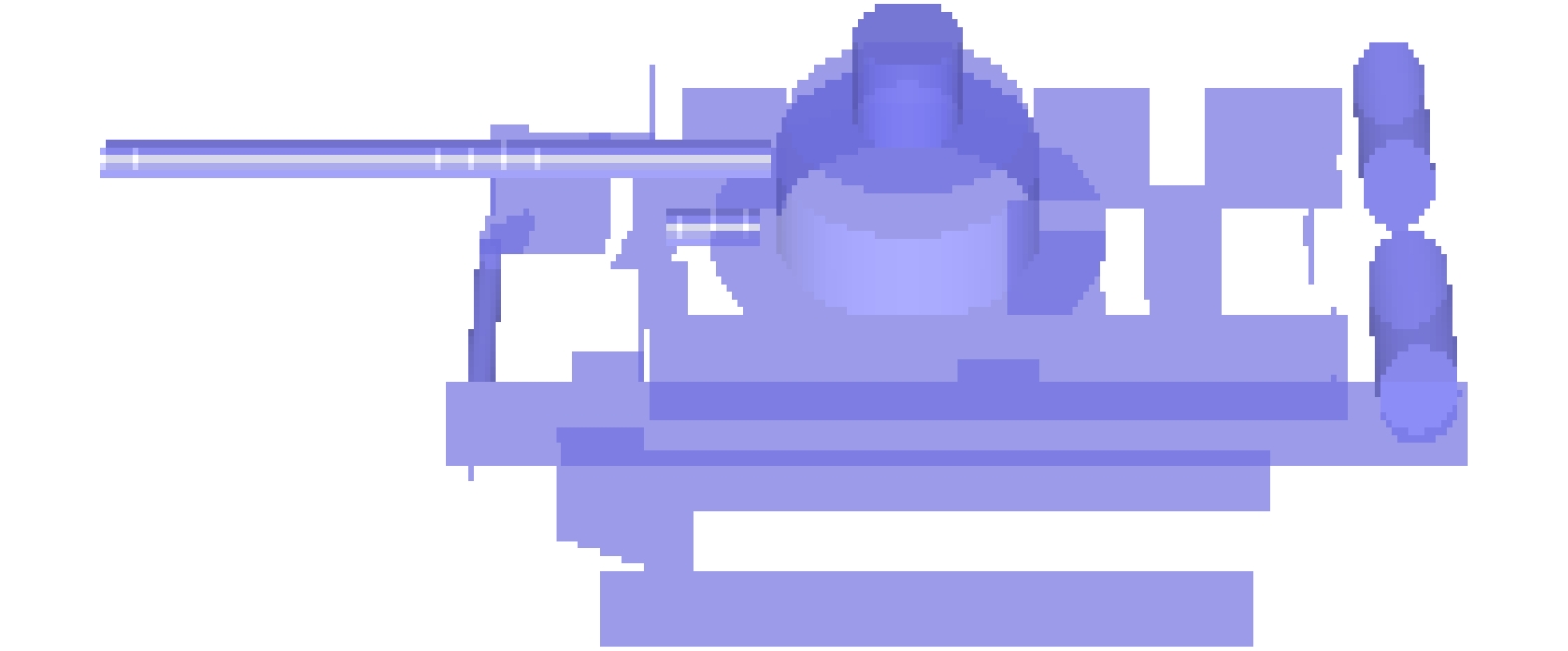
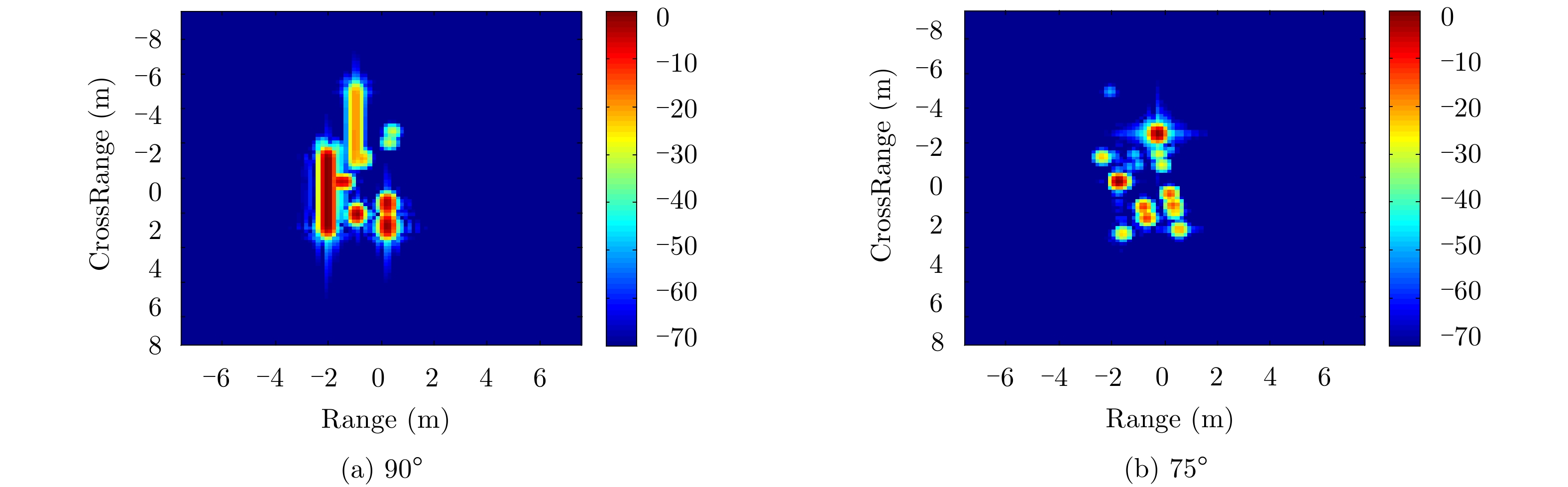
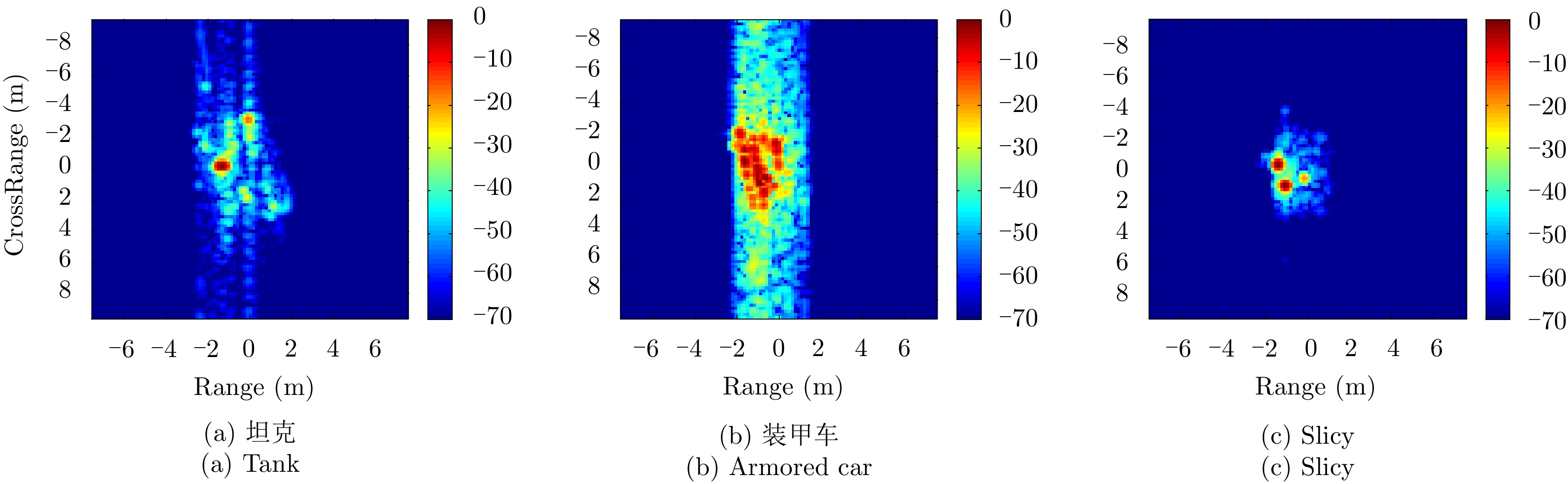
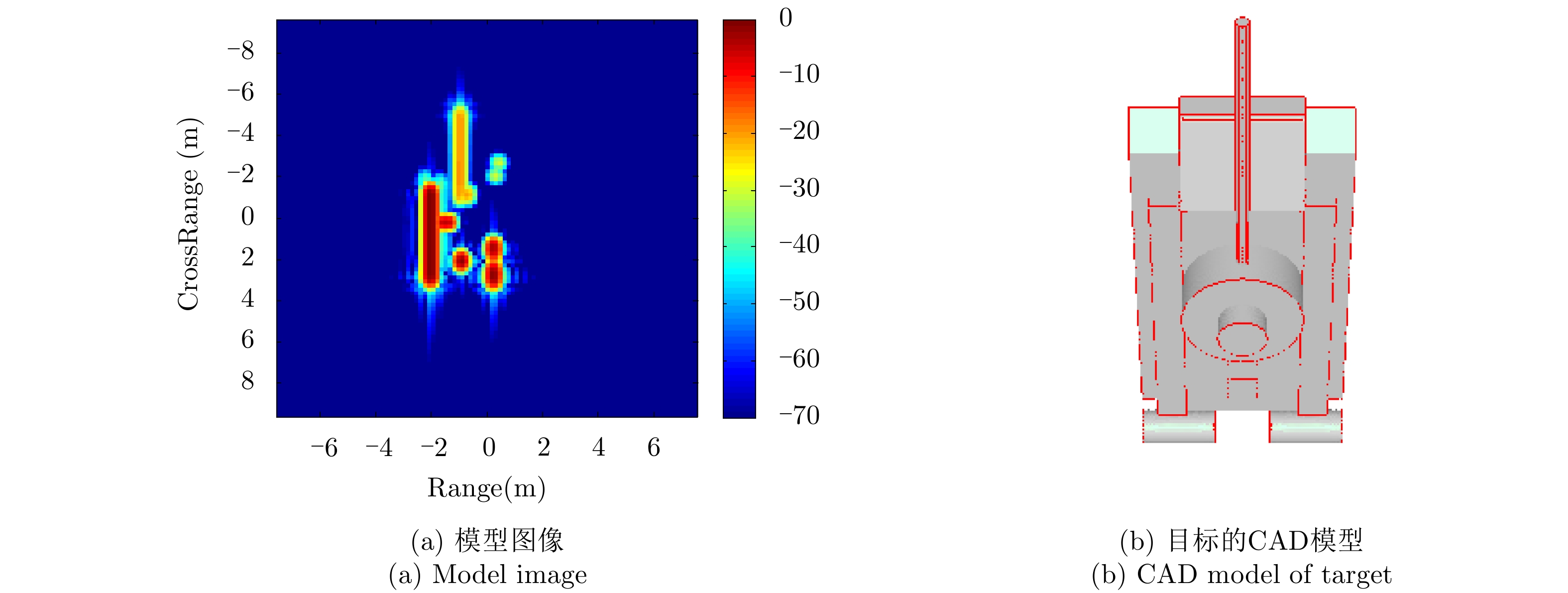
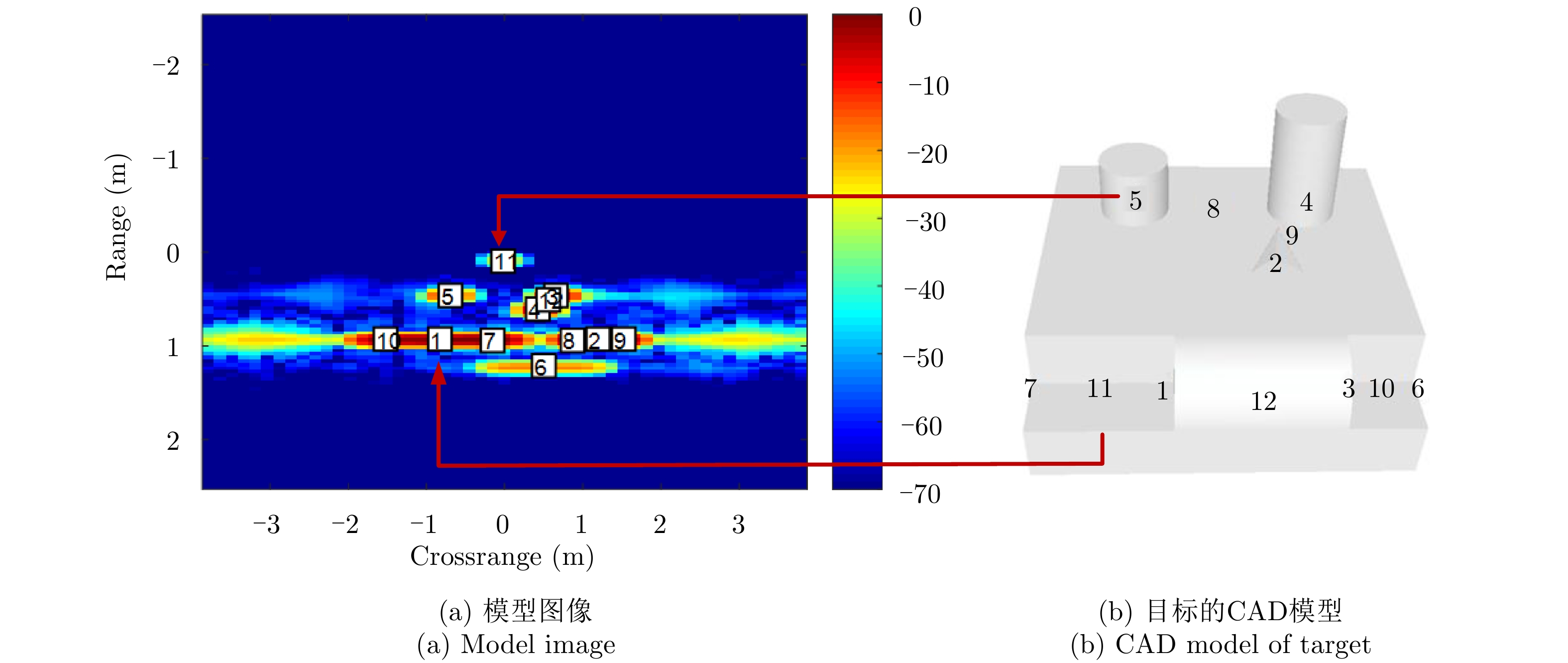
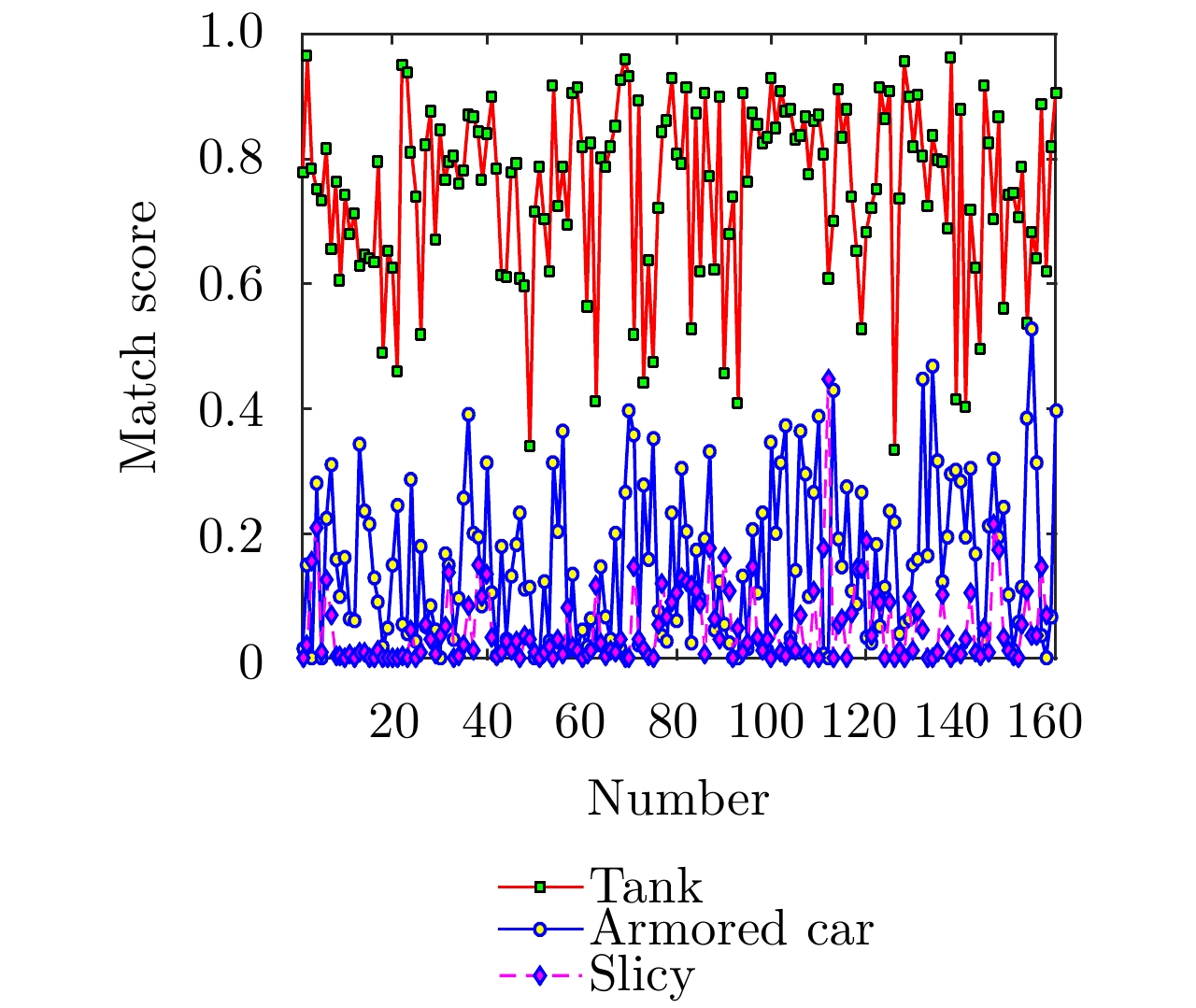
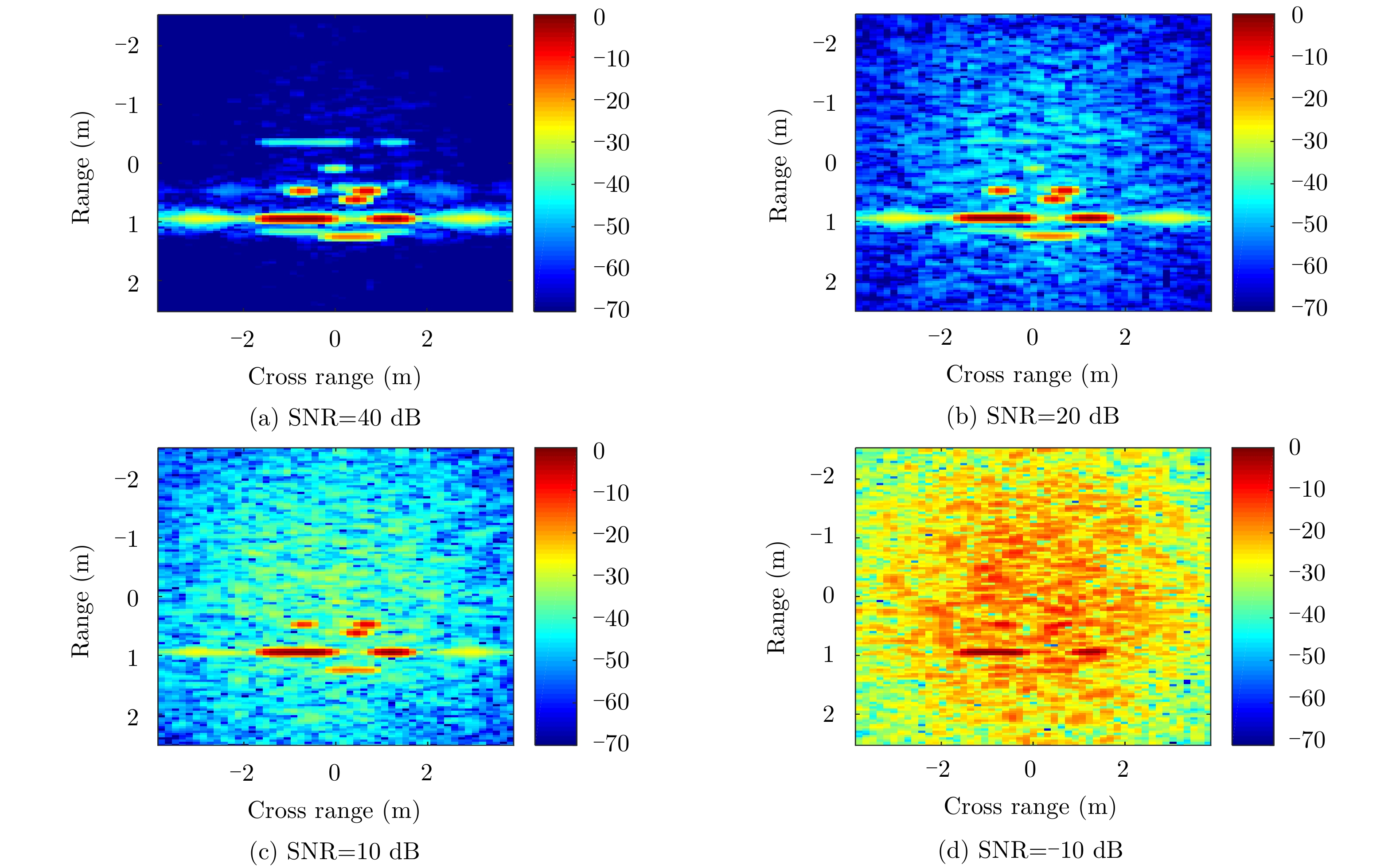
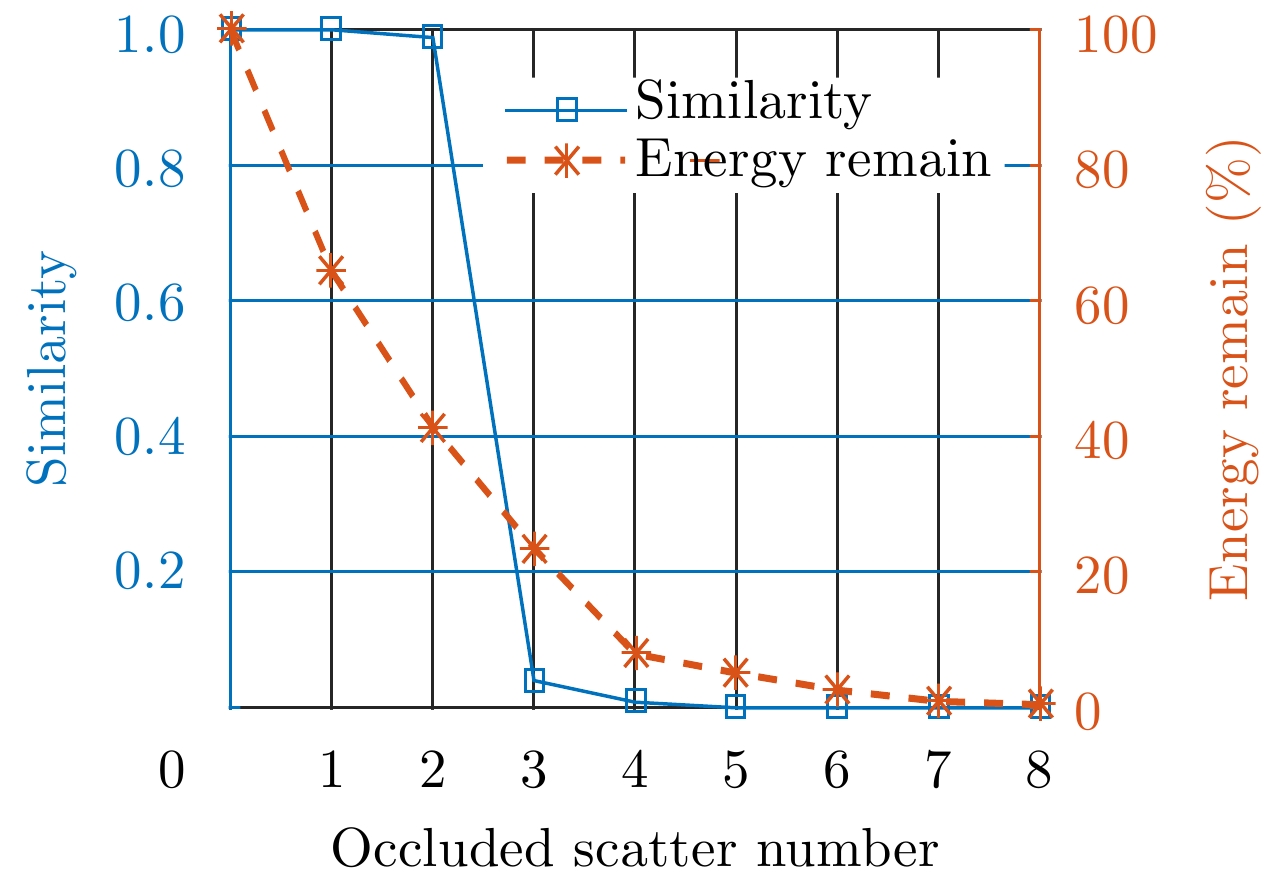
该文通过部件级三维参数化电磁模型(3D-PEPM)描述了复杂目标的电磁散射现象,并基于此模型提出了一种新的合成孔径雷达(SAR)目标识别方法。该方法首先根据雷达参数将3D-PEPM中各个散射体的散射响应投影到二维图像平面,预测每个散射体的位置和形状,然后根据3D-PEPM提供的先验信息评估3D-PEPM与SAR数据之间的相似程度,最后利用一种视角调整方法对整个过程进行优化,产生3D-PEPM和SAR数据之间的最终匹配分数,并根据该匹配分数完成识别决策。这种识别方法明确标识了SAR数据和3D-PEPM散射体之间的对应关系,具有清晰的物理可解释性,能够有效处理各种扩展条件下的SAR目标识别问题,仿真实验验证了该方法的有效性。 该文通过部件级三维参数化电磁模型(3D-PEPM)描述了复杂目标的电磁散射现象,并基于此模型提出了一种新的合成孔径雷达(SAR)目标识别方法。该方法首先根据雷达参数将3D-PEPM中各个散射体的散射响应投影到二维图像平面,预测每个散射体的位置和形状,然后根据3D-PEPM提供的先验信息评估3D-PEPM与SAR数据之间的相似程度,最后利用一种视角调整方法对整个过程进行优化,产生3D-PEPM和SAR数据之间的最终匹配分数,并根据该匹配分数完成识别决策。这种识别方法明确标识了SAR数据和3D-PEPM散射体之间的对应关系,具有清晰的物理可解释性,能够有效处理各种扩展条件下的SAR目标识别问题,仿真实验验证了该方法的有效性。
该文通过部件级三维参数化电磁模型(3D-PEPM)描述了复杂目标的电磁散射现象,并基于此模型提出了一种新的合成孔径雷达(SAR)目标识别方法。该方法首先根据雷达参数将3D-PEPM中各个散射体的散射响应投影到二维图像平面,预测每个散射体的位置和形状,然后根据3D-PEPM提供的先验信息评估3D-PEPM与SAR数据之间的相似程度,最后利用一种视角调整方法对整个过程进行优化,产生3D-PEPM和SAR数据之间的最终匹配分数,并根据该匹配分数完成识别决策。这种识别方法明确标识了SAR数据和3D-PEPM散射体之间的对应关系,具有清晰的物理可解释性,能够有效处理各种扩展条件下的SAR目标识别问题,仿真实验验证了该方法的有效性。 该文通过部件级三维参数化电磁模型(3D-PEPM)描述了复杂目标的电磁散射现象,并基于此模型提出了一种新的合成孔径雷达(SAR)目标识别方法。该方法首先根据雷达参数将3D-PEPM中各个散射体的散射响应投影到二维图像平面,预测每个散射体的位置和形状,然后根据3D-PEPM提供的先验信息评估3D-PEPM与SAR数据之间的相似程度,最后利用一种视角调整方法对整个过程进行优化,产生3D-PEPM和SAR数据之间的最终匹配分数,并根据该匹配分数完成识别决策。这种识别方法明确标识了SAR数据和3D-PEPM散射体之间的对应关系,具有清晰的物理可解释性,能够有效处理各种扩展条件下的SAR目标识别问题,仿真实验验证了该方法的有效性。



2020, 9(4): 622-631.
摘要:
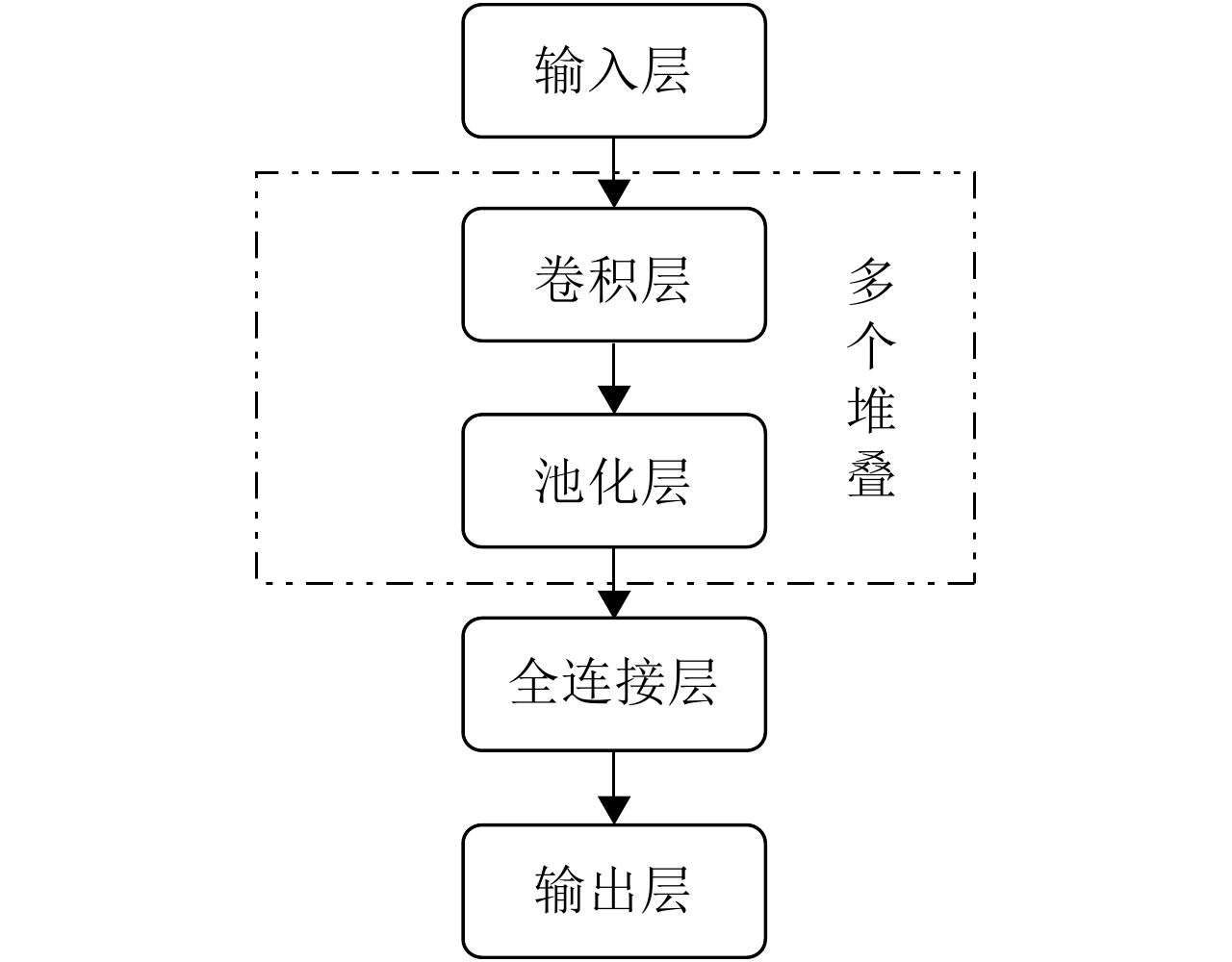
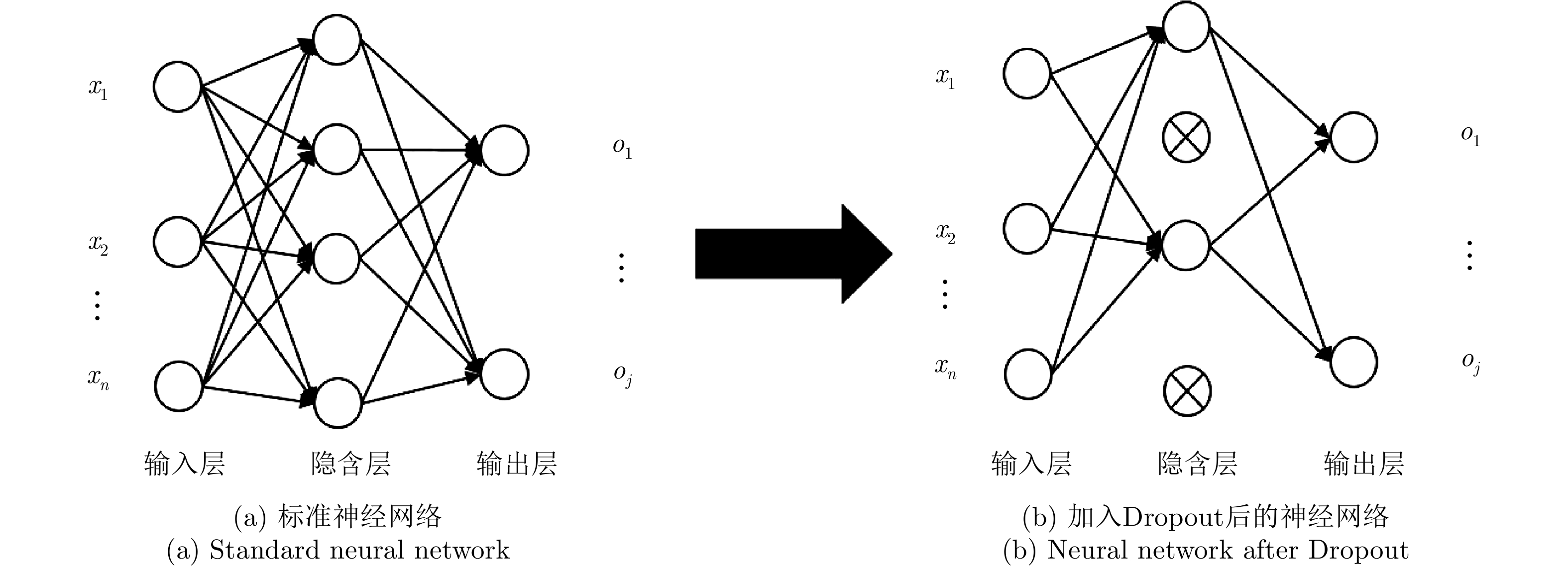
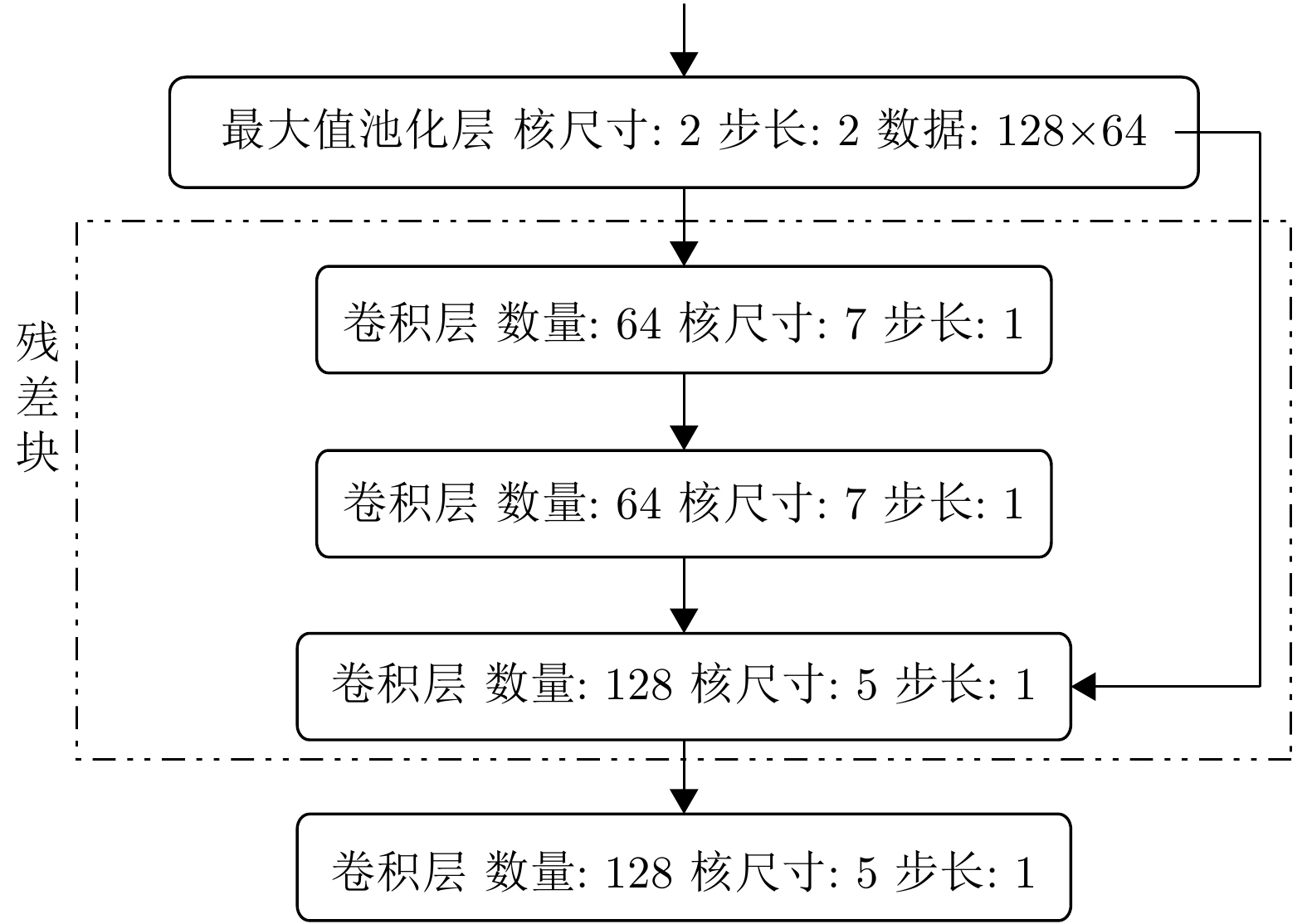
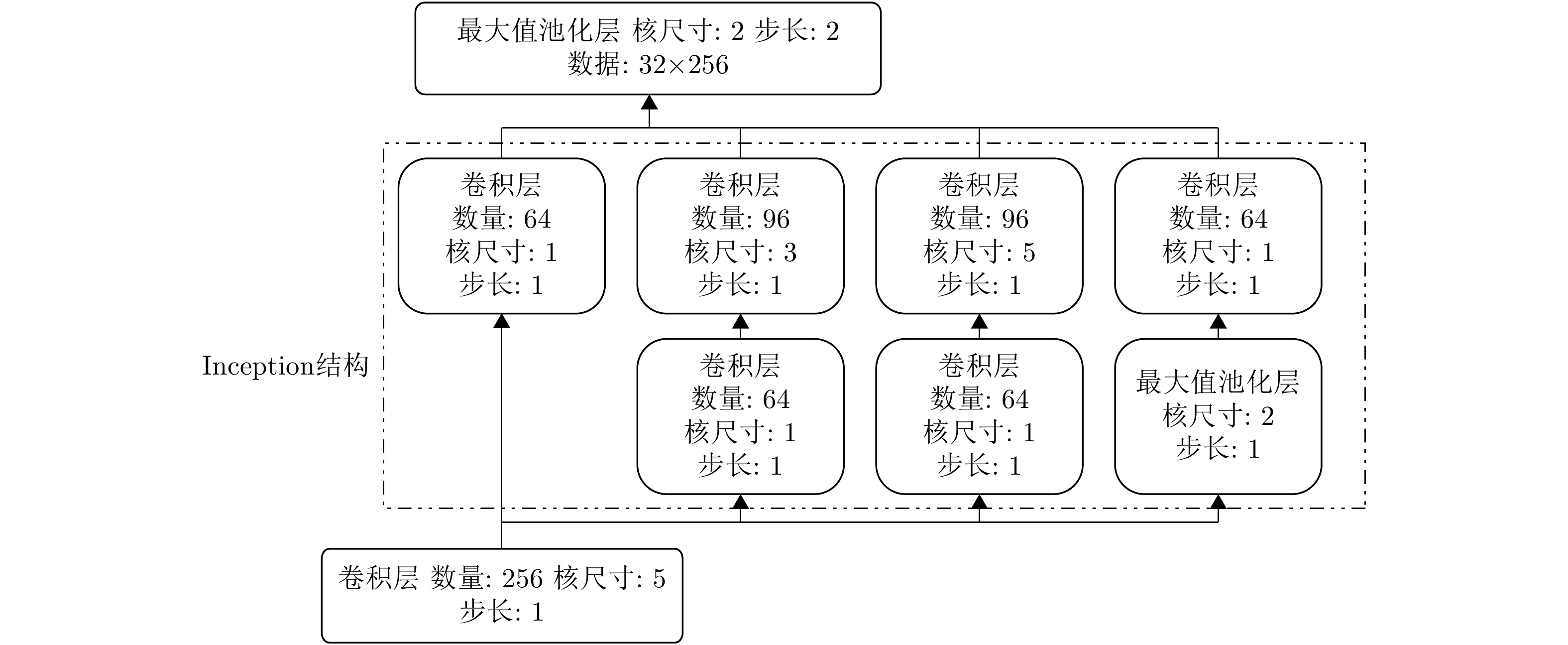
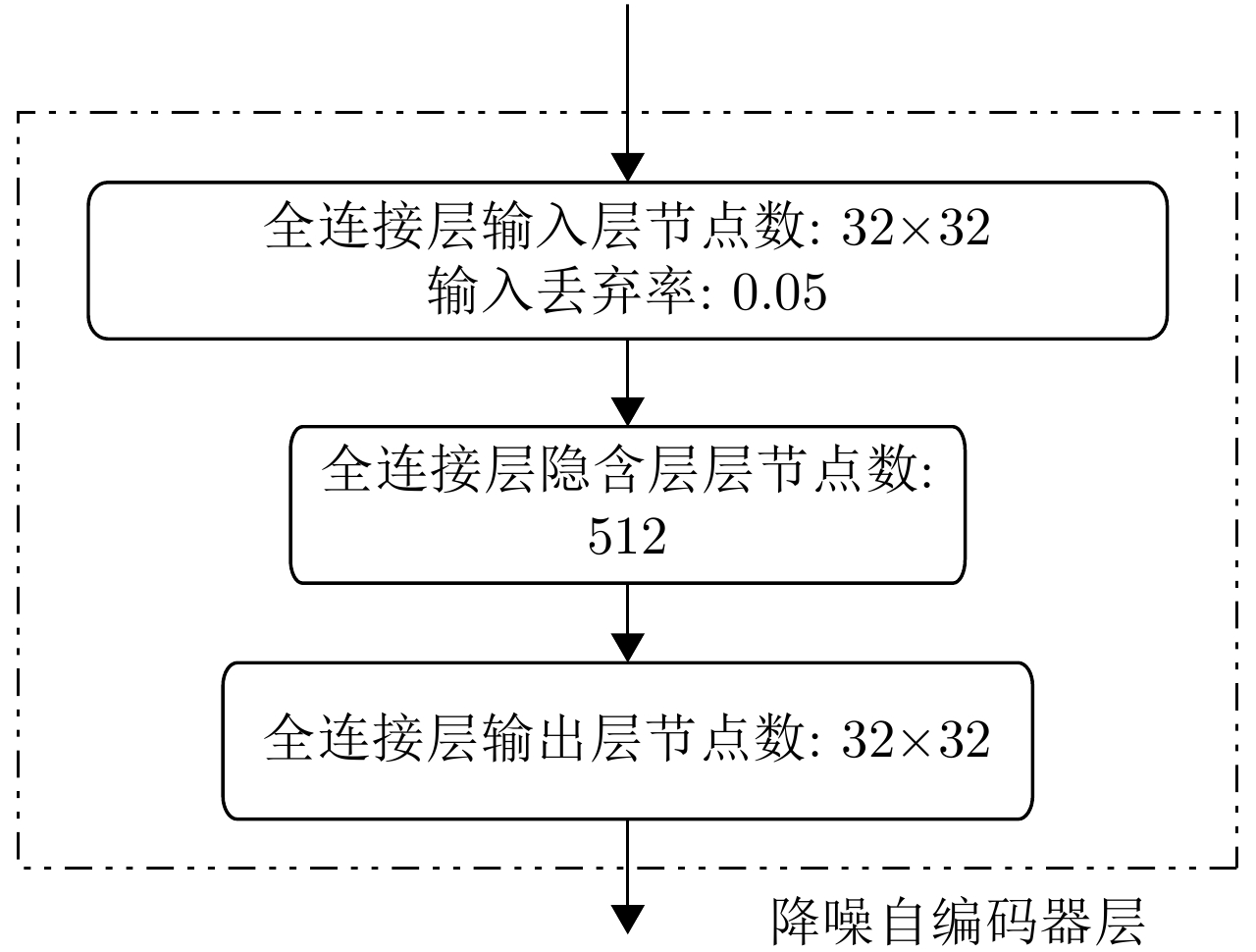
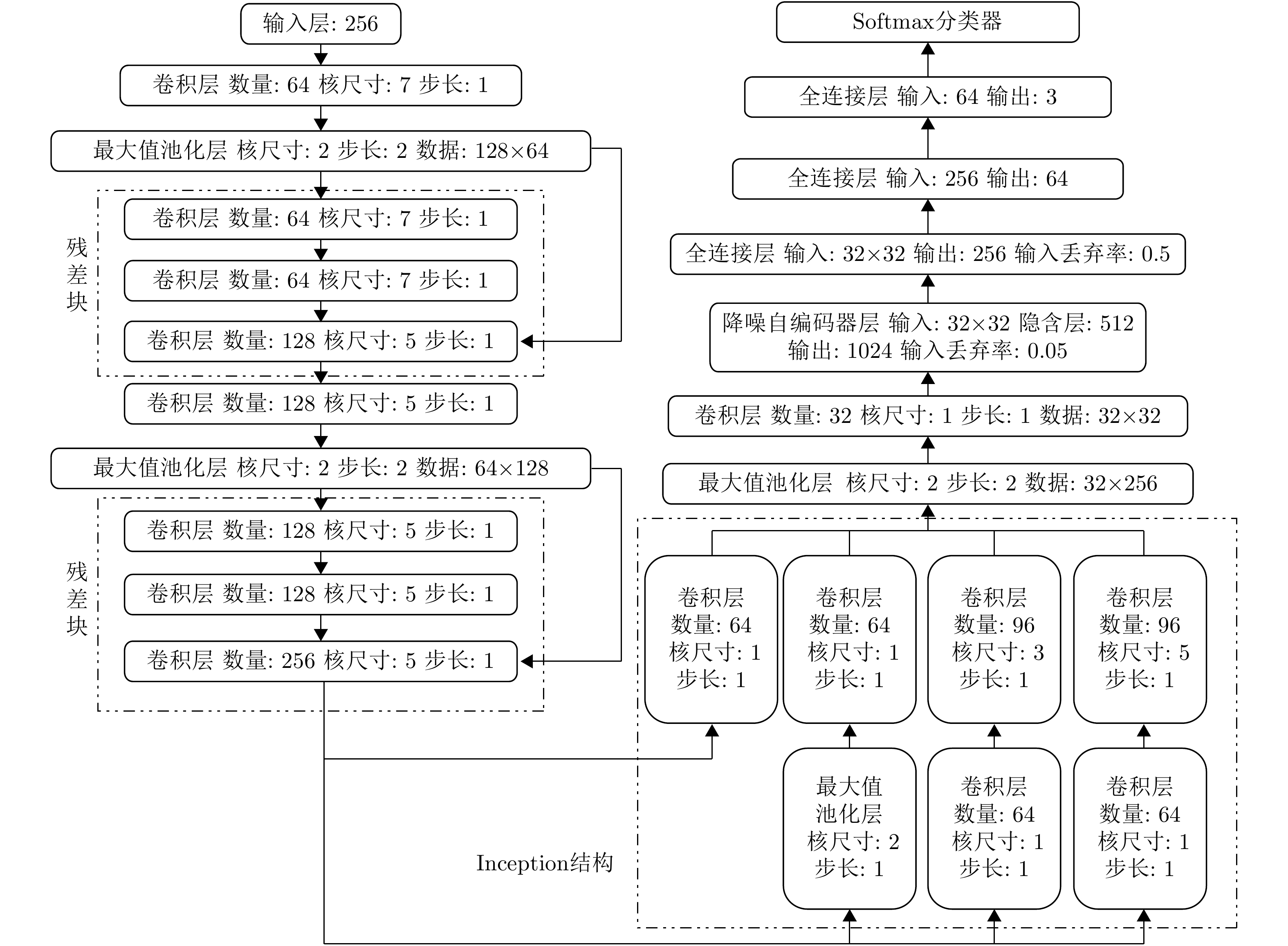
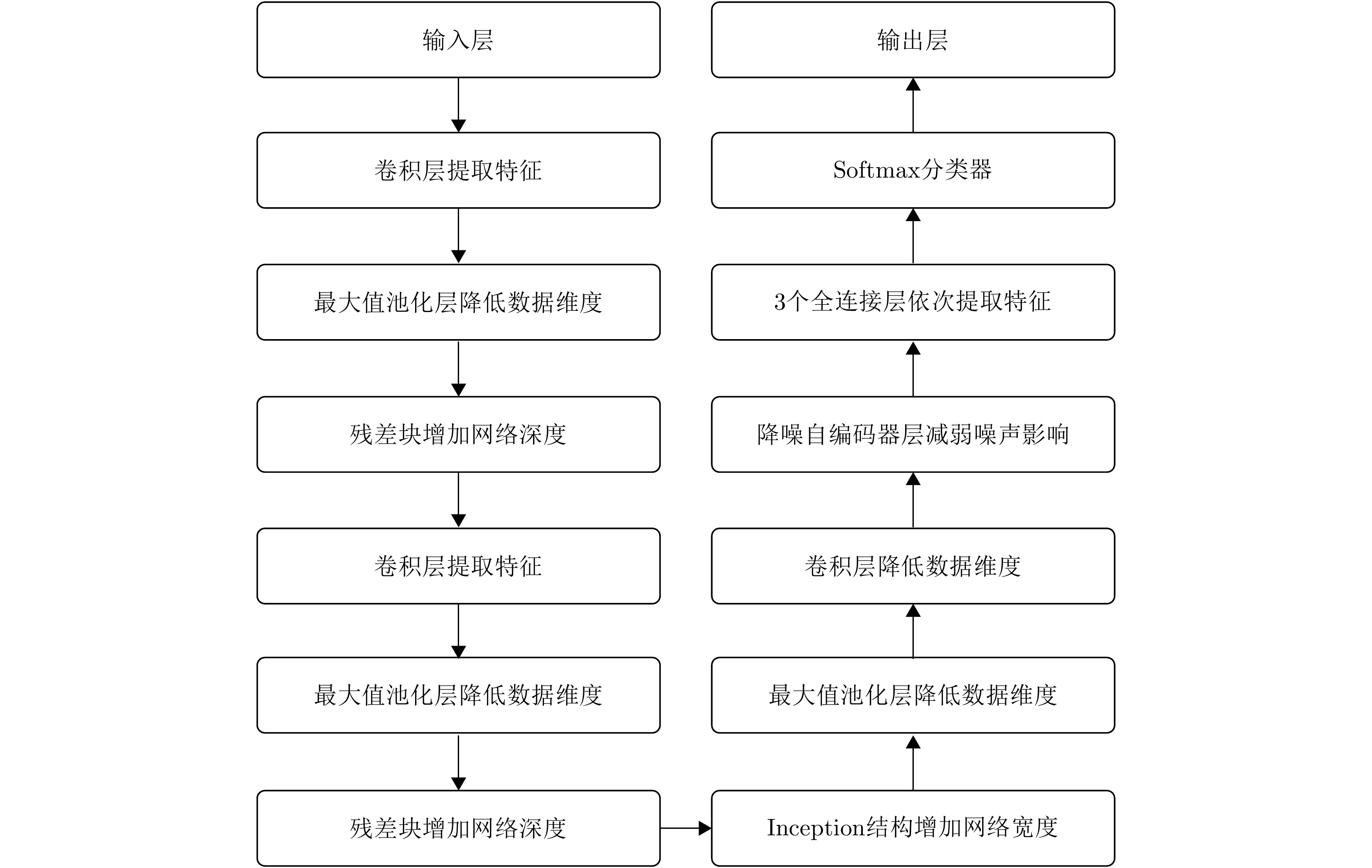
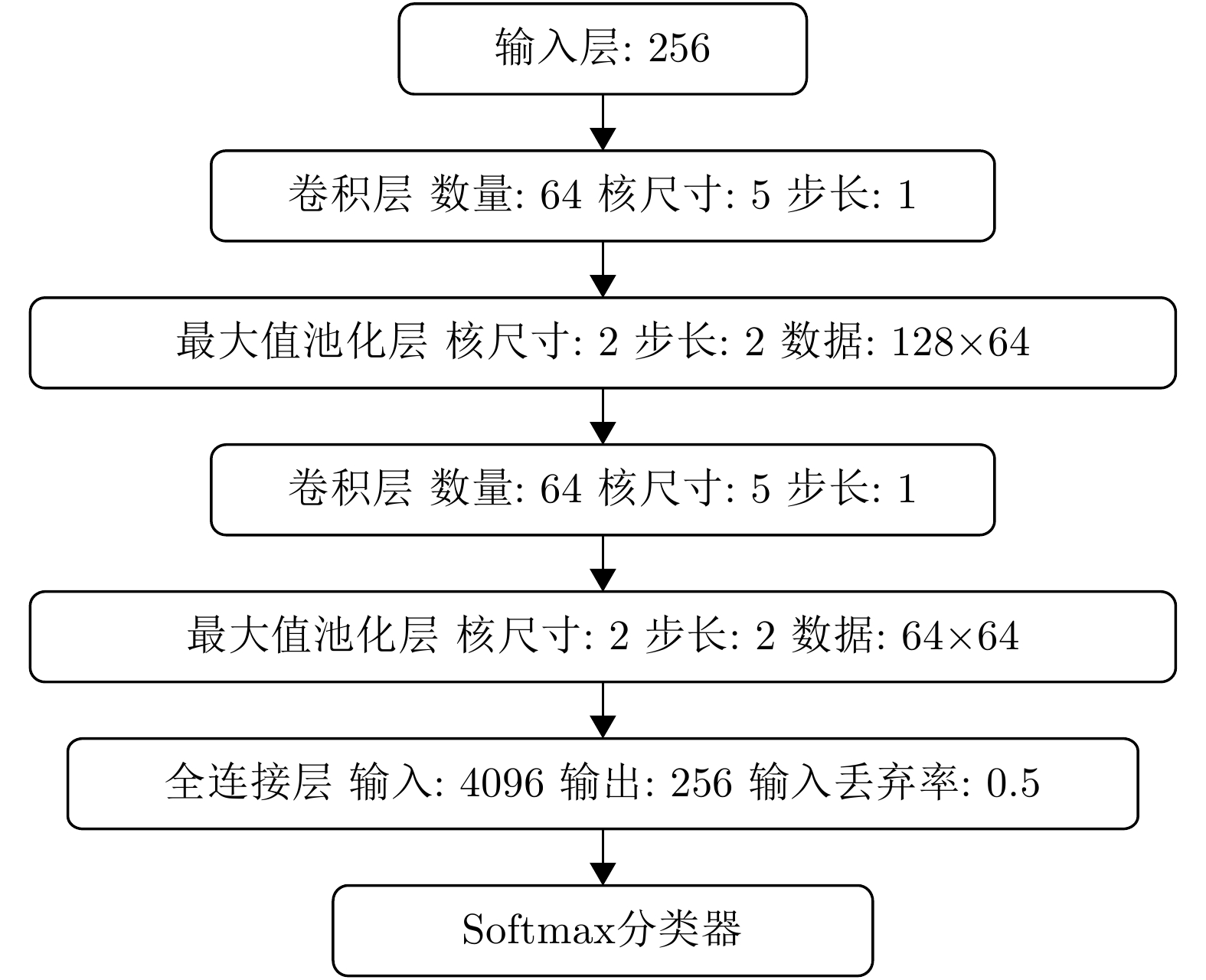
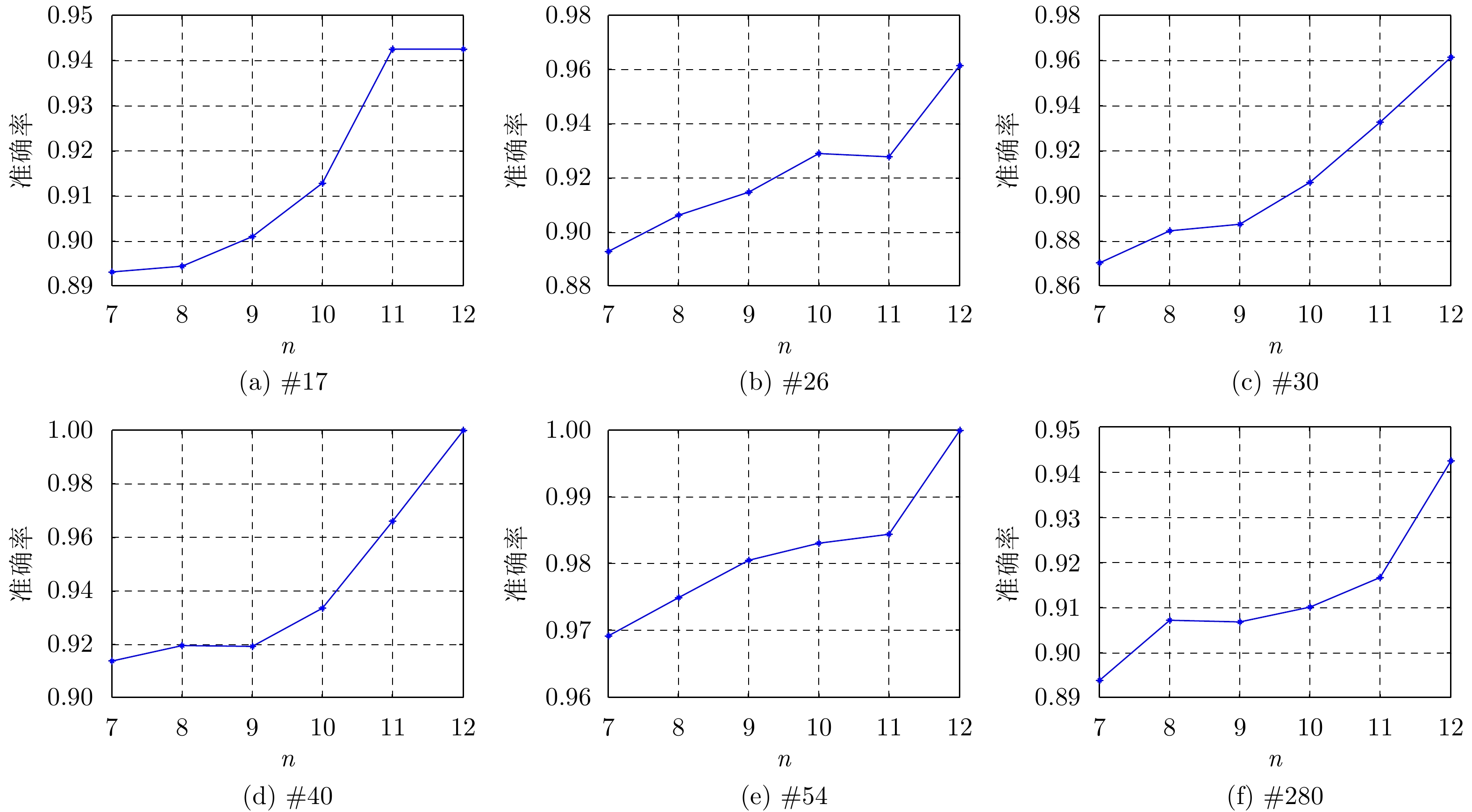
随着深度学习技术被应用于雷达目标识别领域,其自动提取目标特征的特性大大提高了识别的准确率和鲁棒性,但噪声环境下的鲁棒性有待进一步研究。该文提出了一种在噪声环境下基于卷积神经网络(CNN)的雷达高分辨率距离像(HRRP)数据识别方法,通过增强训练集和使用残差块、inception结构和降噪自编码层增强网络结构,实现了在较宽信噪比范围下的较高识别率,其中在信噪比为0 dB的瑞利噪声条件下,识别率达到96.14%,并分析了网络结构和噪声类型对结果的影响。 随着深度学习技术被应用于雷达目标识别领域,其自动提取目标特征的特性大大提高了识别的准确率和鲁棒性,但噪声环境下的鲁棒性有待进一步研究。该文提出了一种在噪声环境下基于卷积神经网络(CNN)的雷达高分辨率距离像(HRRP)数据识别方法,通过增强训练集和使用残差块、inception结构和降噪自编码层增强网络结构,实现了在较宽信噪比范围下的较高识别率,其中在信噪比为0 dB的瑞利噪声条件下,识别率达到96.14%,并分析了网络结构和噪声类型对结果的影响。
随着深度学习技术被应用于雷达目标识别领域,其自动提取目标特征的特性大大提高了识别的准确率和鲁棒性,但噪声环境下的鲁棒性有待进一步研究。该文提出了一种在噪声环境下基于卷积神经网络(CNN)的雷达高分辨率距离像(HRRP)数据识别方法,通过增强训练集和使用残差块、inception结构和降噪自编码层增强网络结构,实现了在较宽信噪比范围下的较高识别率,其中在信噪比为0 dB的瑞利噪声条件下,识别率达到96.14%,并分析了网络结构和噪声类型对结果的影响。 随着深度学习技术被应用于雷达目标识别领域,其自动提取目标特征的特性大大提高了识别的准确率和鲁棒性,但噪声环境下的鲁棒性有待进一步研究。该文提出了一种在噪声环境下基于卷积神经网络(CNN)的雷达高分辨率距离像(HRRP)数据识别方法,通过增强训练集和使用残差块、inception结构和降噪自编码层增强网络结构,实现了在较宽信噪比范围下的较高识别率,其中在信噪比为0 dB的瑞利噪声条件下,识别率达到96.14%,并分析了网络结构和噪声类型对结果的影响。

2020, 9(4): 632-639.
摘要:
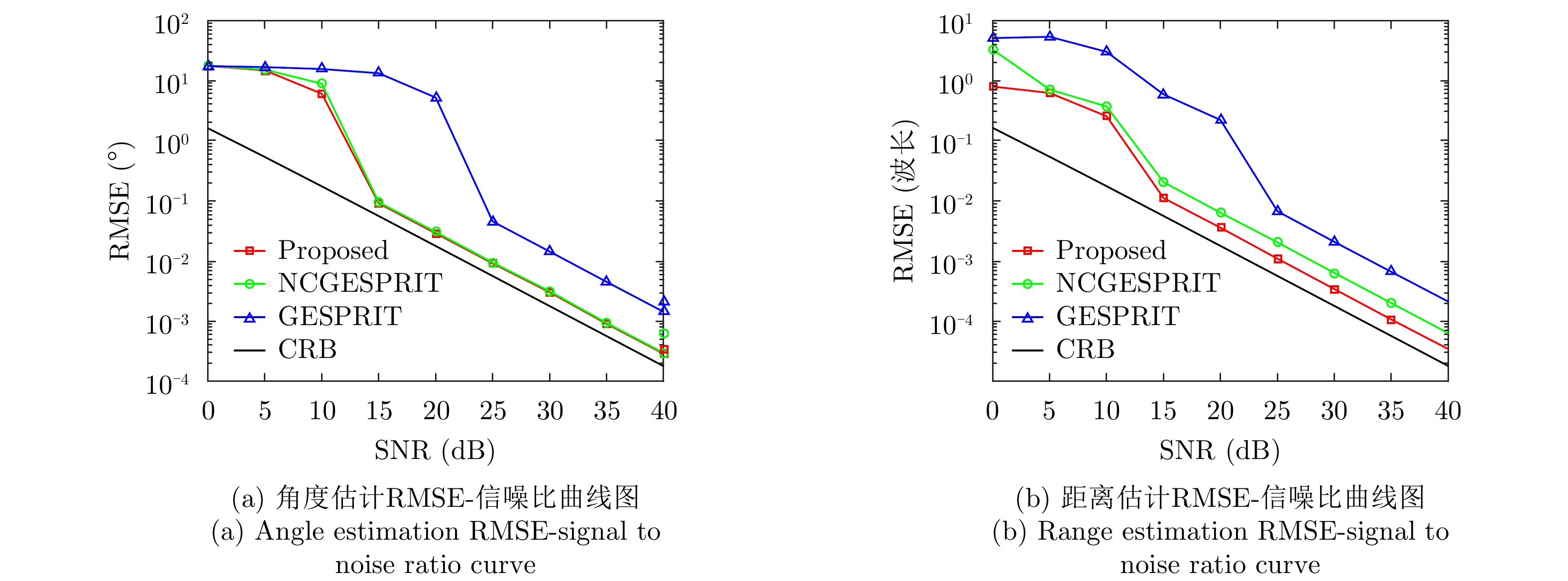
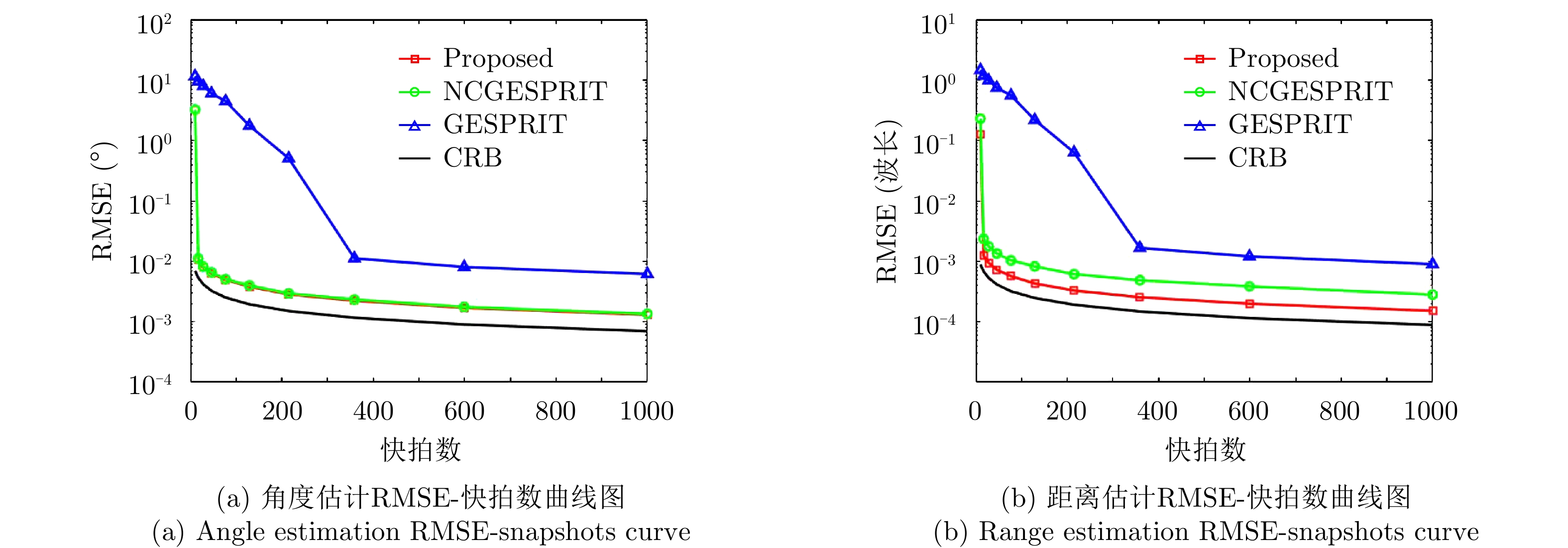
该文基于对称的均匀线阵提出了一种近场非圆信号参数的快速估计算法,算法基于信号的非圆特性以及阵列的对称性对近场导向矢量进行解耦,并利用多项式求根取代传统的谱峰搜索对近场源的角度及距离参数进行快速估计。基于给定的阵列结构,建立非圆信号参数估计的多项式数学模型,然后对其进行求根即可获得近场信号源位置参数。所提算法采用多项式求根的方法有效地降低了运算复杂度,同时利用信号的非圆特性提高了参数估计的自由度(DOF)。通过性能分析和计算机仿真实验可以看出该算法能够分辨更多的近场非圆信号,并且参数估计性能有所提升,更接近于近场源参数估计的克拉美罗界(CRB)。 该文基于对称的均匀线阵提出了一种近场非圆信号参数的快速估计算法,算法基于信号的非圆特性以及阵列的对称性对近场导向矢量进行解耦,并利用多项式求根取代传统的谱峰搜索对近场源的角度及距离参数进行快速估计。基于给定的阵列结构,建立非圆信号参数估计的多项式数学模型,然后对其进行求根即可获得近场信号源位置参数。所提算法采用多项式求根的方法有效地降低了运算复杂度,同时利用信号的非圆特性提高了参数估计的自由度(DOF)。通过性能分析和计算机仿真实验可以看出该算法能够分辨更多的近场非圆信号,并且参数估计性能有所提升,更接近于近场源参数估计的克拉美罗界(CRB)。
该文基于对称的均匀线阵提出了一种近场非圆信号参数的快速估计算法,算法基于信号的非圆特性以及阵列的对称性对近场导向矢量进行解耦,并利用多项式求根取代传统的谱峰搜索对近场源的角度及距离参数进行快速估计。基于给定的阵列结构,建立非圆信号参数估计的多项式数学模型,然后对其进行求根即可获得近场信号源位置参数。所提算法采用多项式求根的方法有效地降低了运算复杂度,同时利用信号的非圆特性提高了参数估计的自由度(DOF)。通过性能分析和计算机仿真实验可以看出该算法能够分辨更多的近场非圆信号,并且参数估计性能有所提升,更接近于近场源参数估计的克拉美罗界(CRB)。 该文基于对称的均匀线阵提出了一种近场非圆信号参数的快速估计算法,算法基于信号的非圆特性以及阵列的对称性对近场导向矢量进行解耦,并利用多项式求根取代传统的谱峰搜索对近场源的角度及距离参数进行快速估计。基于给定的阵列结构,建立非圆信号参数估计的多项式数学模型,然后对其进行求根即可获得近场信号源位置参数。所提算法采用多项式求根的方法有效地降低了运算复杂度,同时利用信号的非圆特性提高了参数估计的自由度(DOF)。通过性能分析和计算机仿真实验可以看出该算法能够分辨更多的近场非圆信号,并且参数估计性能有所提升,更接近于近场源参数估计的克拉美罗界(CRB)。


2020, 9(4): 640-653.
摘要:
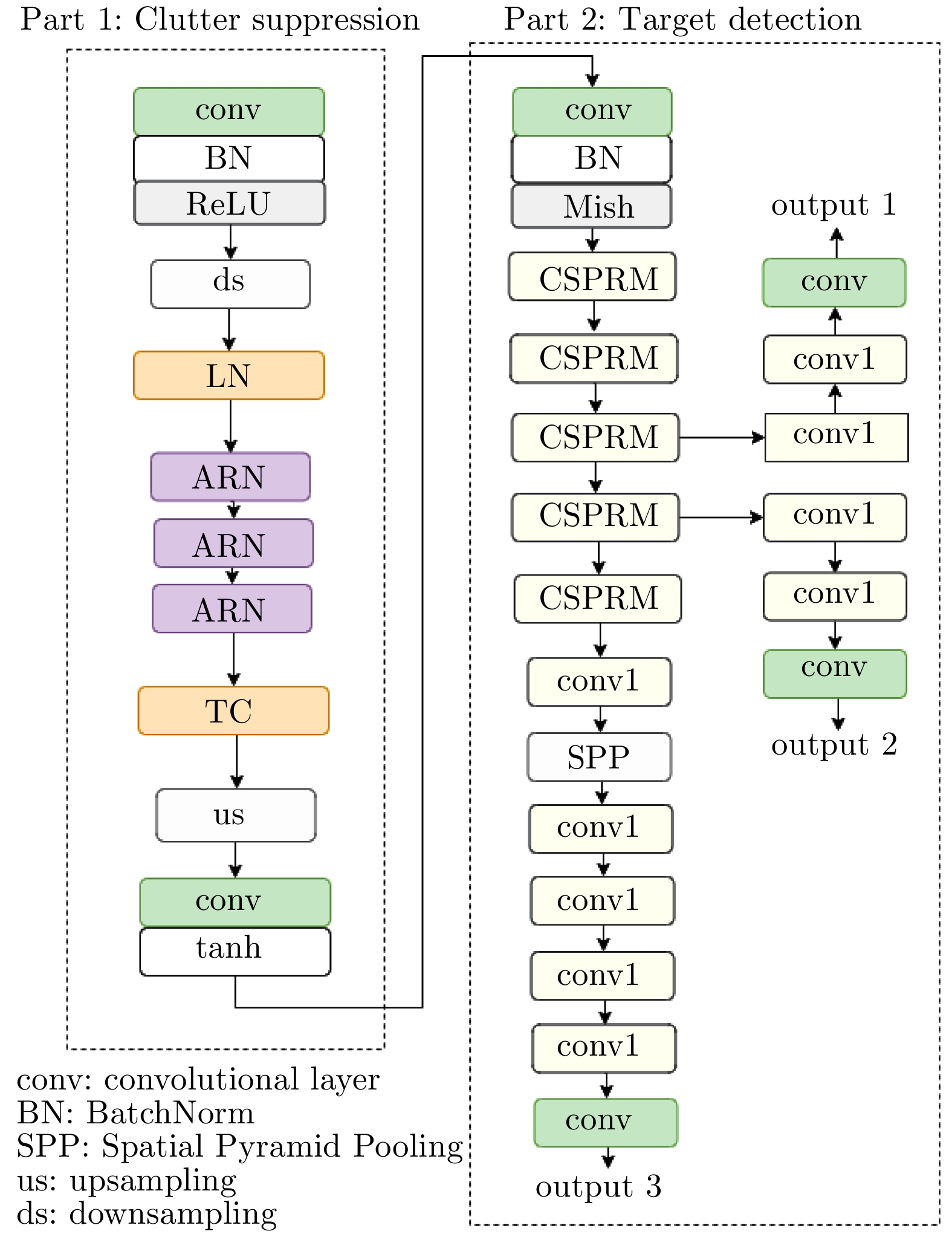
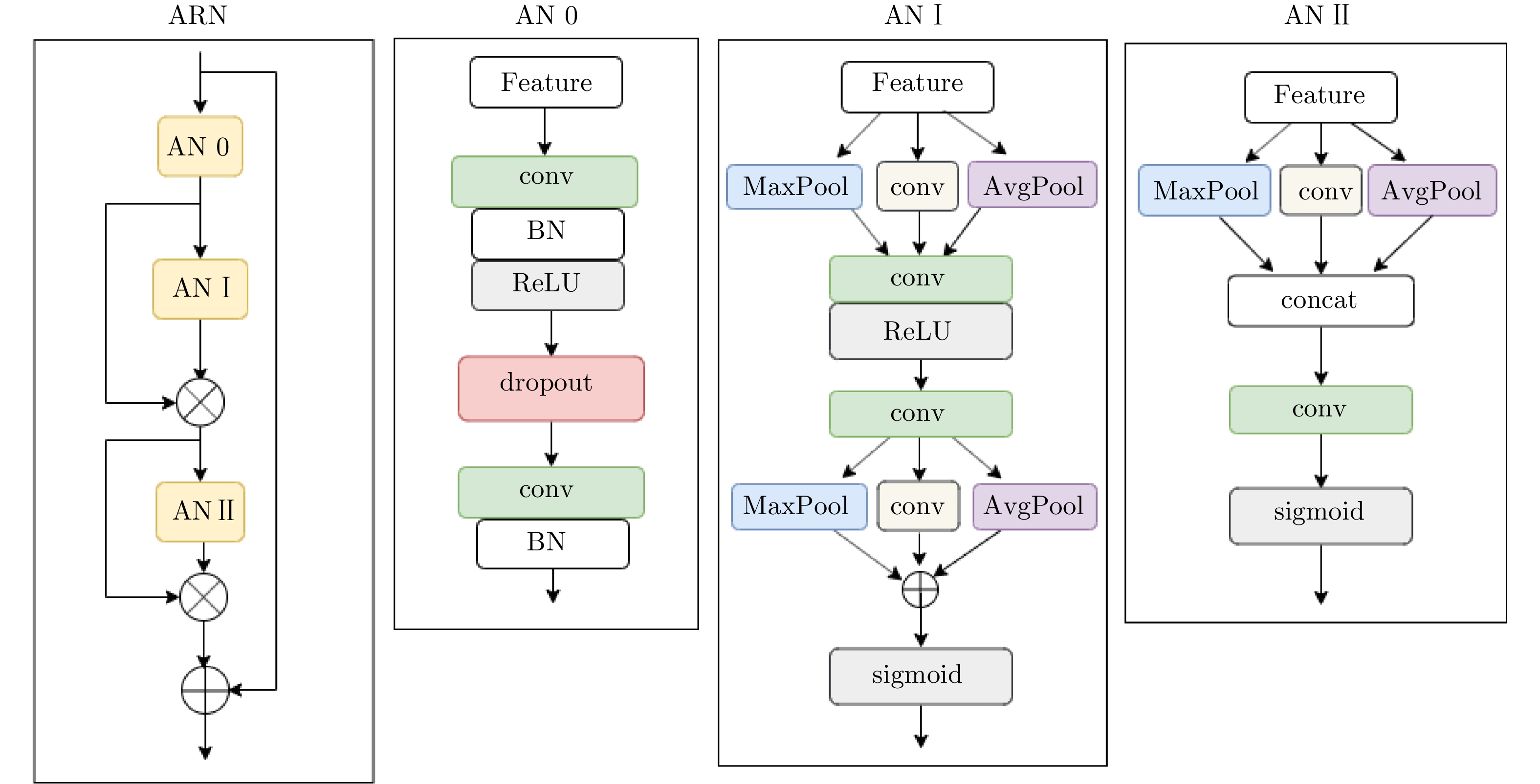
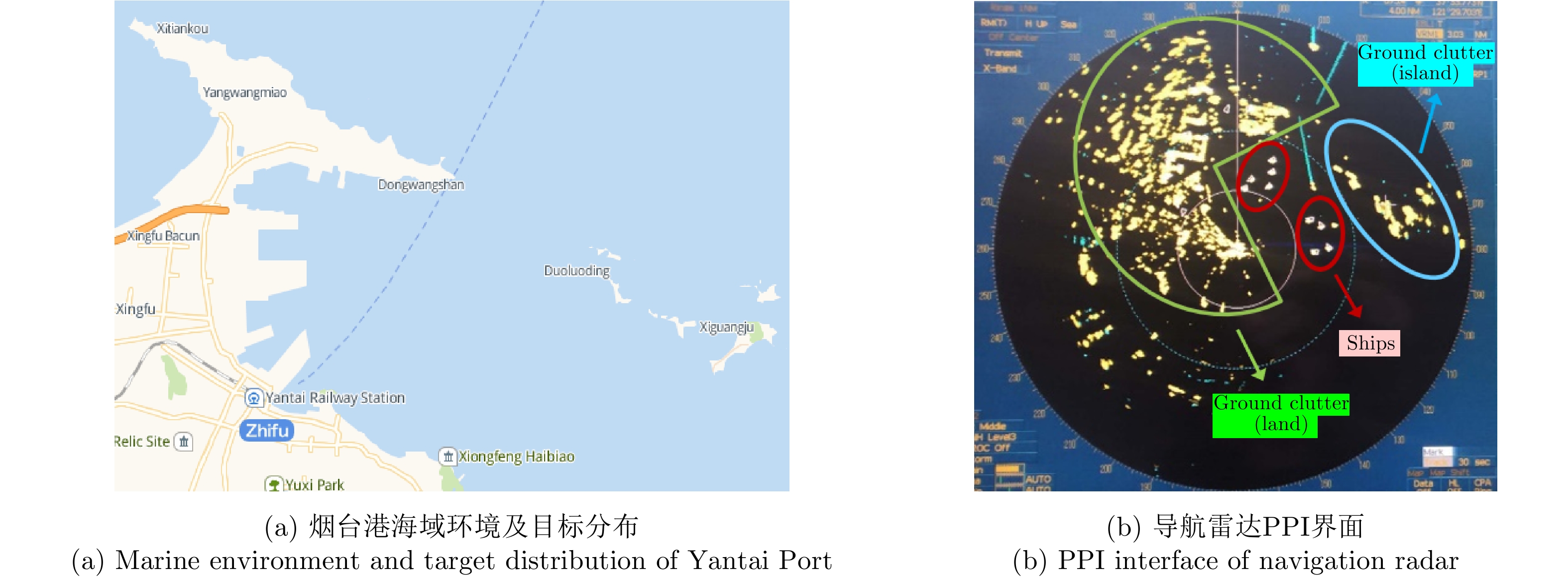
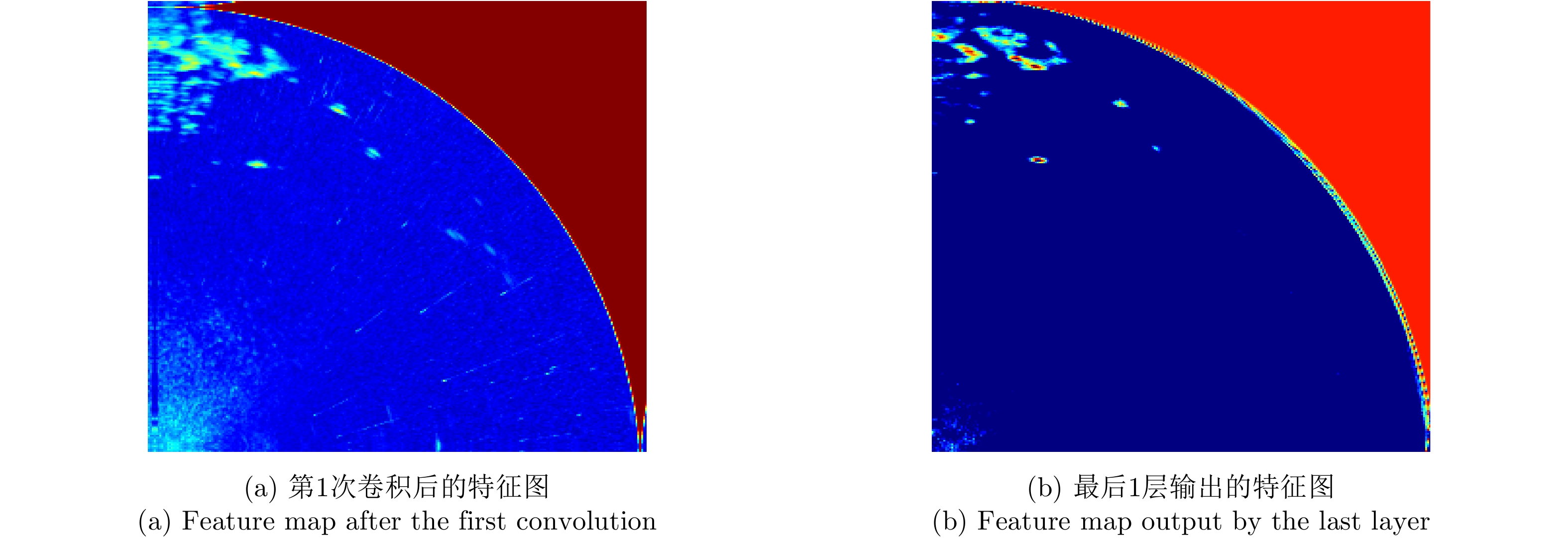
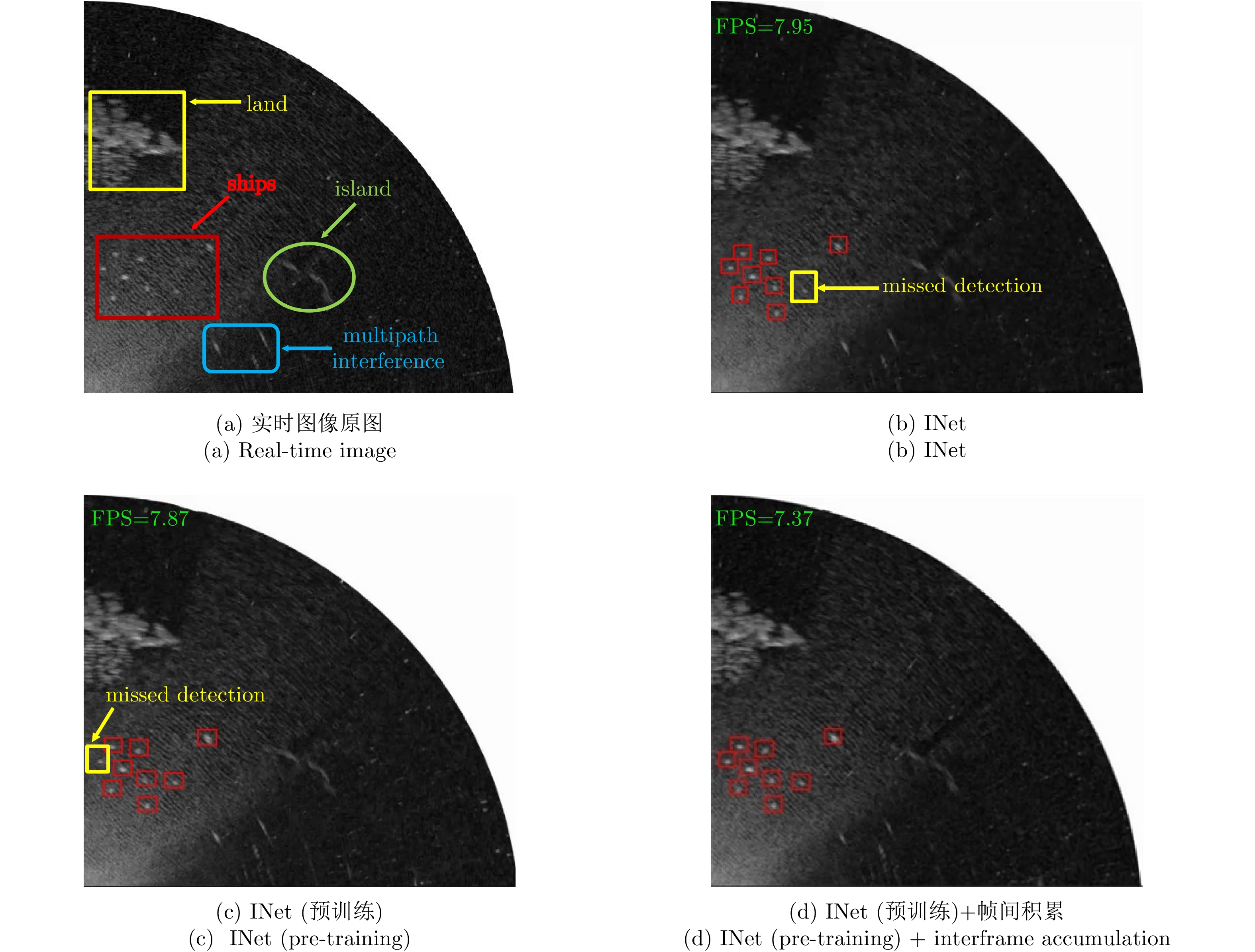
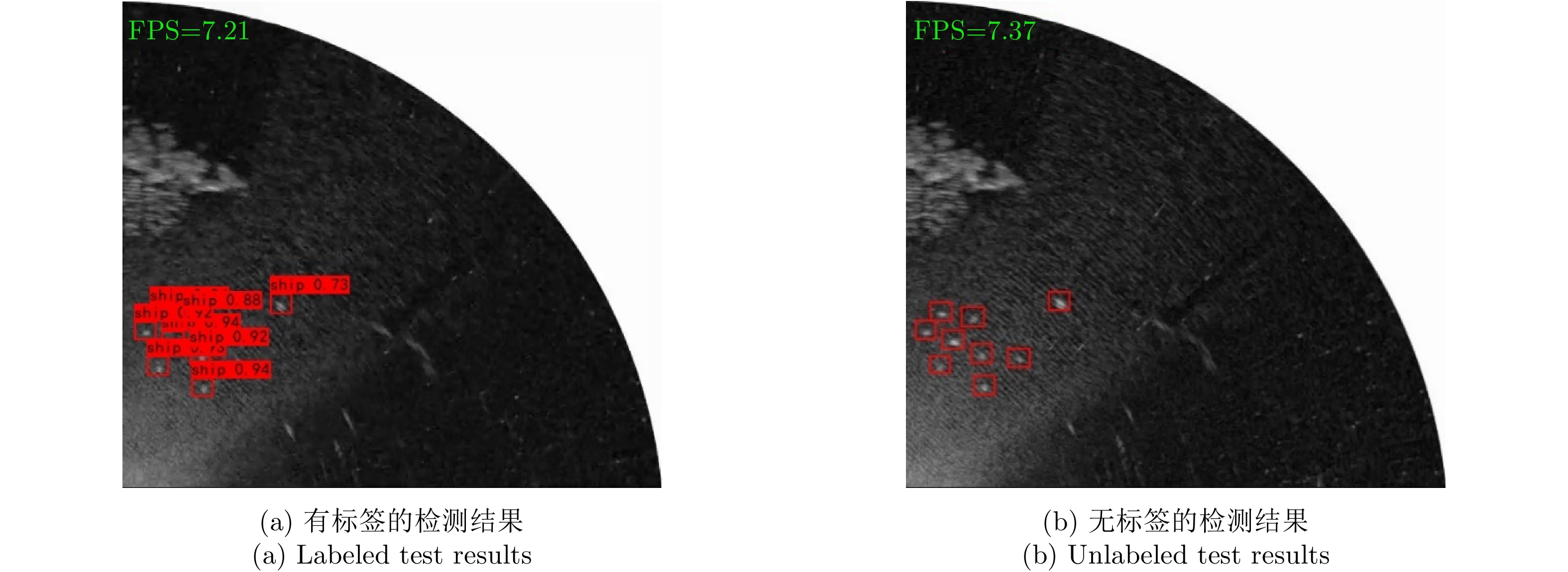
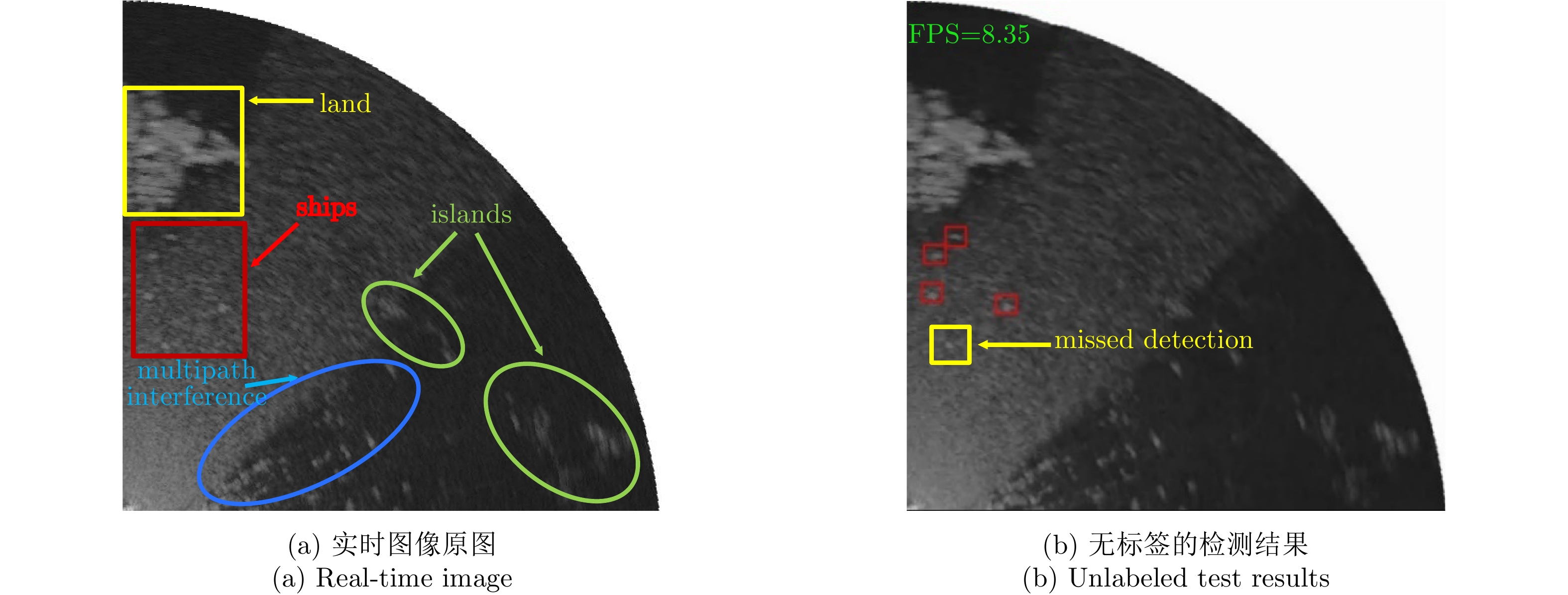
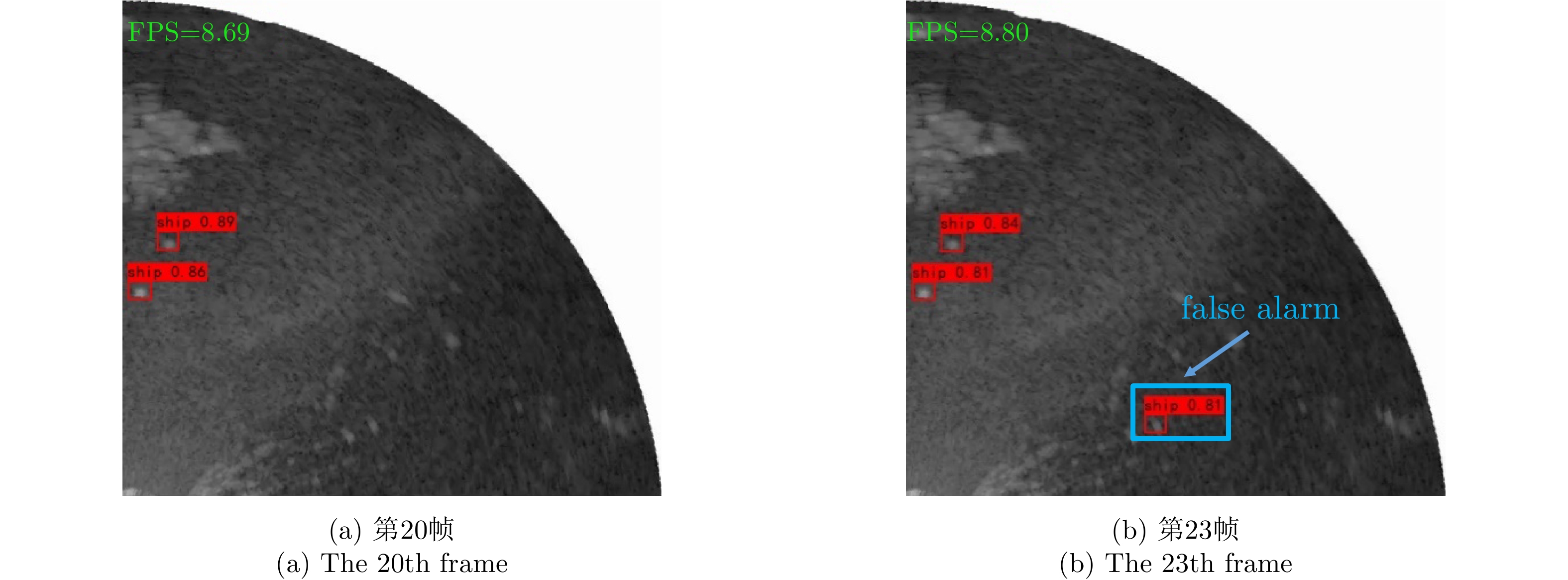
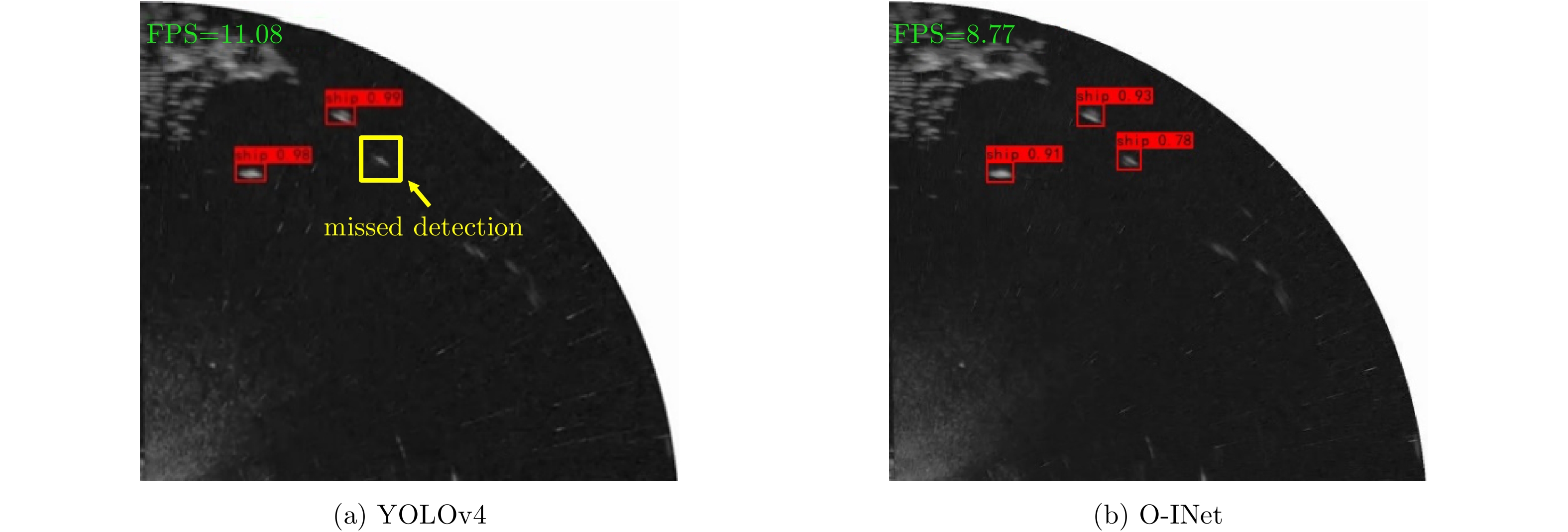
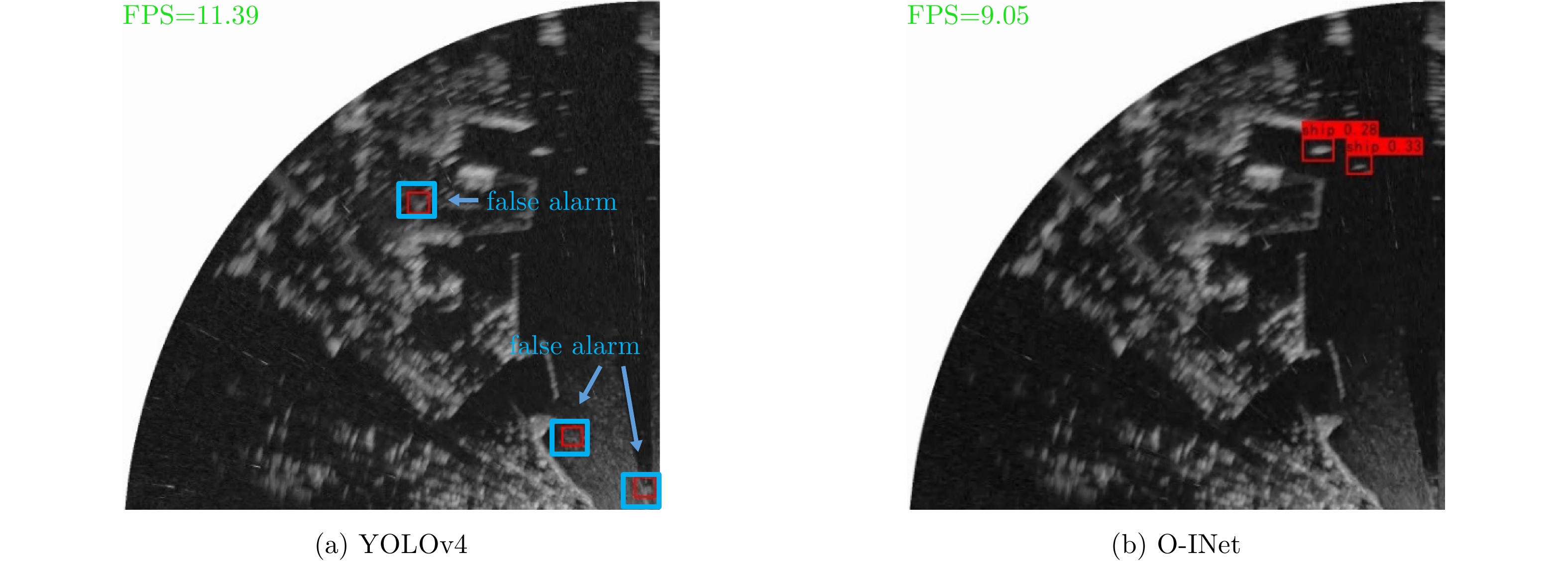
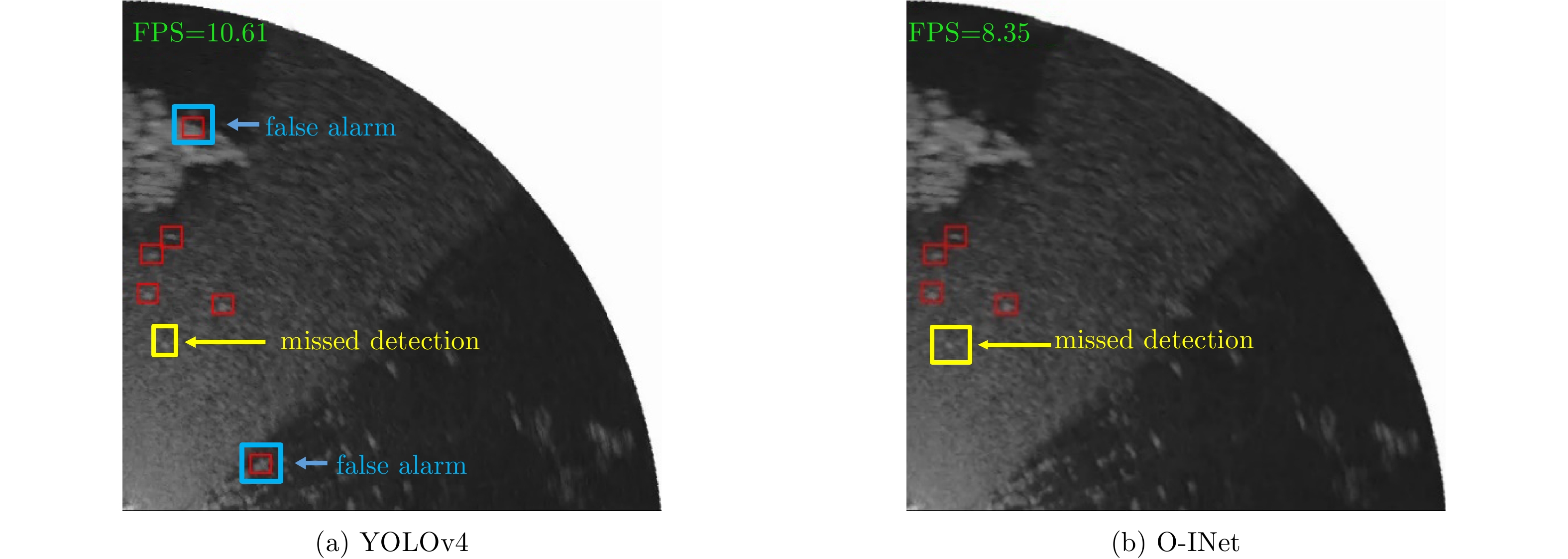
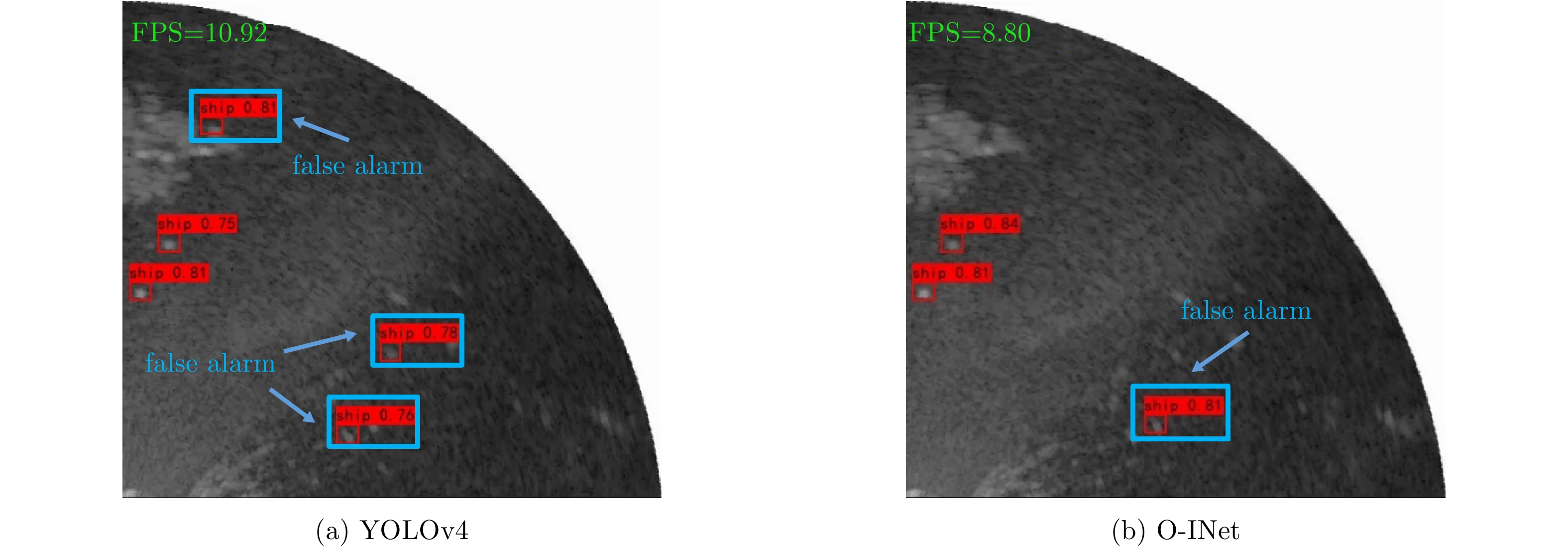
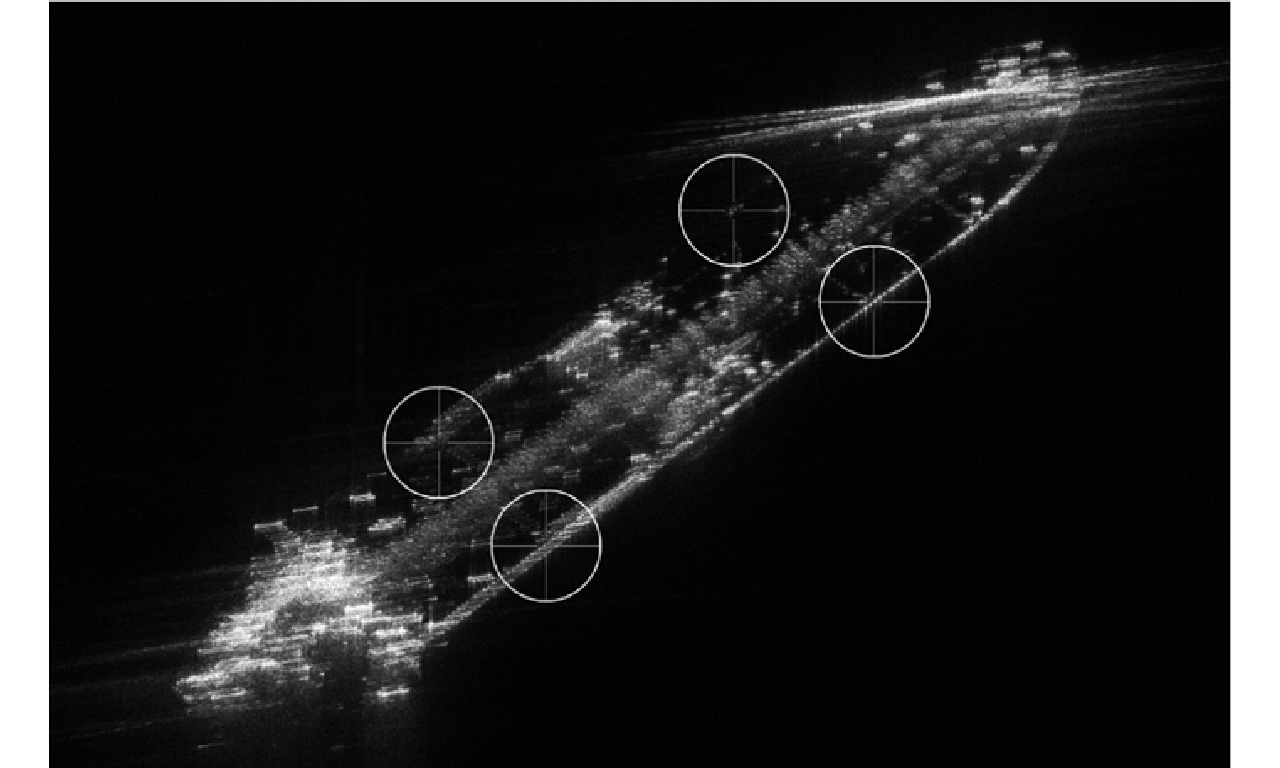
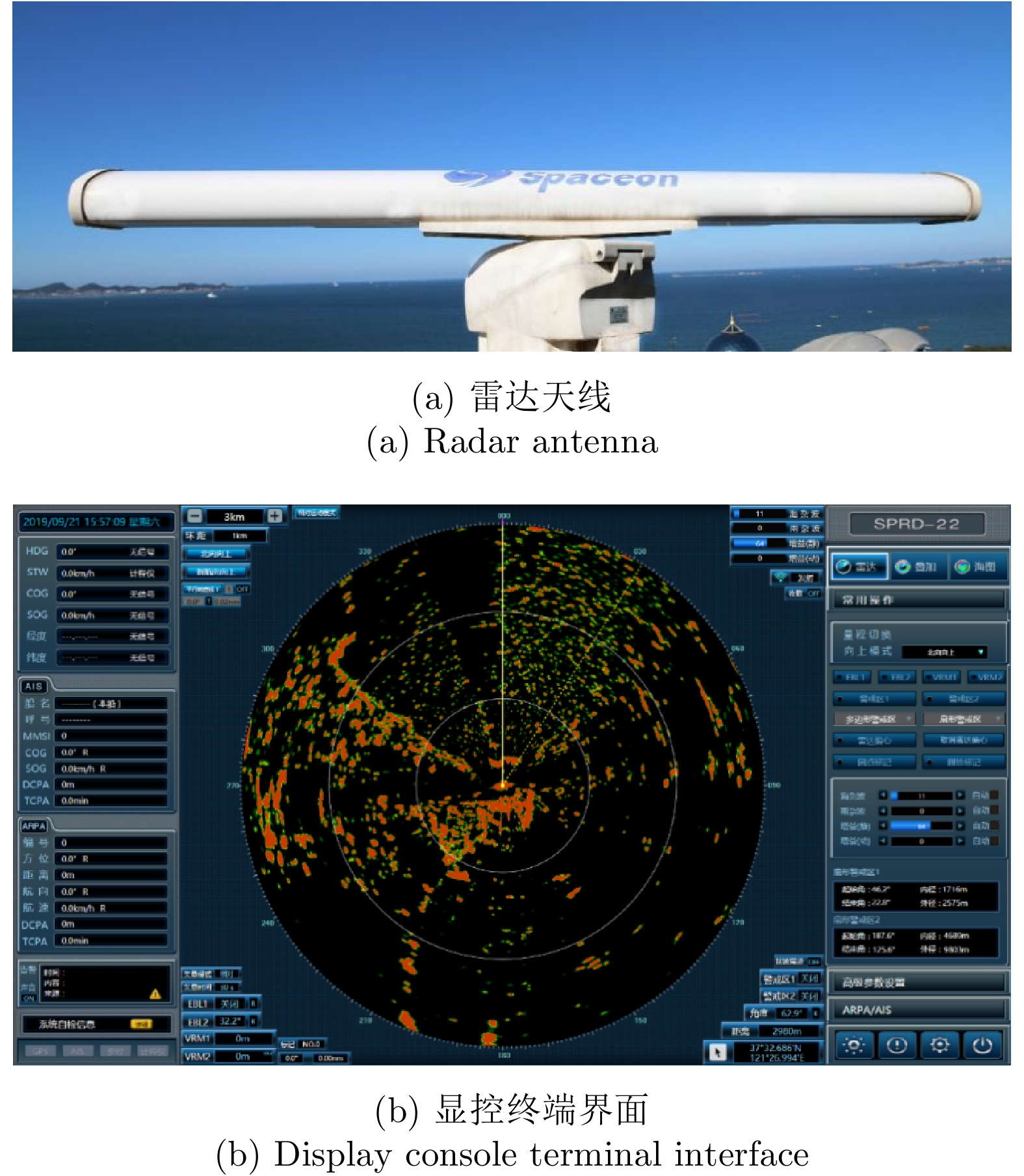
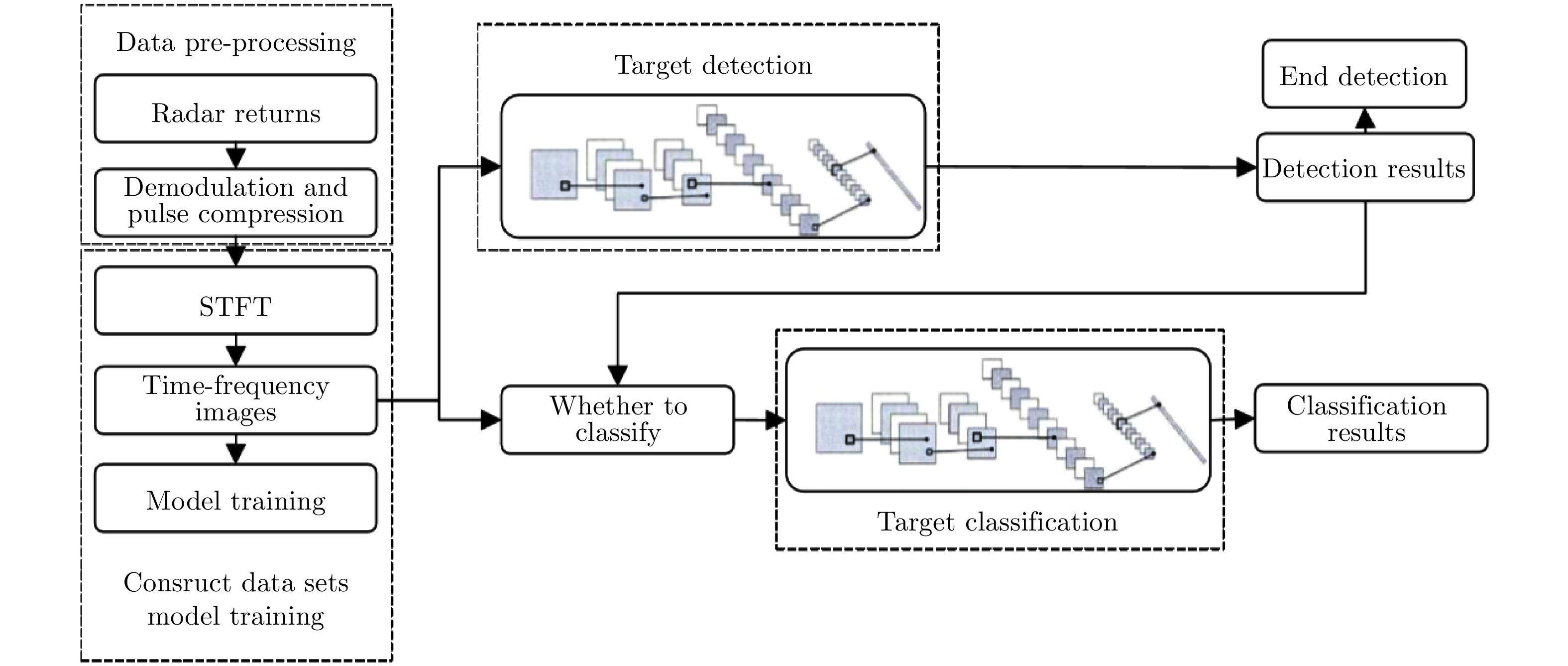
强海杂波与海面目标的复杂特性使得海面目标回波微弱,有效的海杂波抑制和稳健快速的目标检测是雷达对海上目标探测需考虑的重要因素。然而,现有的海面目标检测算法对于复杂环境下的目标检测性能有限,环境和目标特性适应性差。该文设计了一种杂波抑制和目标检测融合网络(INet),通过层归一化-传递和连接方法提取关键目标特征,采用注意力网络抑制杂波和增强目标,构建跨阶段局部残差网络保证检测网络的轻量化和准确性。基于导航雷达在多种观测条件下采集的回波数据,构建了海面目标雷达图像数据集;通过模型的预训练和平面位置显示器(PPI)图像的帧间积累对INet进行了优化,得到了Optimized INet(O-INet)模型。经过多种天气条件下实测数据测试和验证,并与YOLOv3, YOLOv4,双参数CFAR和二维CA-CFAR对比后证明,所提方法在提高检测概率、降低虚警率和复杂条件下的强泛化能力有显著优势。 强海杂波与海面目标的复杂特性使得海面目标回波微弱,有效的海杂波抑制和稳健快速的目标检测是雷达对海上目标探测需考虑的重要因素。然而,现有的海面目标检测算法对于复杂环境下的目标检测性能有限,环境和目标特性适应性差。该文设计了一种杂波抑制和目标检测融合网络(INet),通过层归一化-传递和连接方法提取关键目标特征,采用注意力网络抑制杂波和增强目标,构建跨阶段局部残差网络保证检测网络的轻量化和准确性。基于导航雷达在多种观测条件下采集的回波数据,构建了海面目标雷达图像数据集;通过模型的预训练和平面位置显示器(PPI)图像的帧间积累对INet进行了优化,得到了Optimized INet(O-INet)模型。经过多种天气条件下实测数据测试和验证,并与YOLOv3, YOLOv4,双参数CFAR和二维CA-CFAR对比后证明,所提方法在提高检测概率、降低虚警率和复杂条件下的强泛化能力有显著优势。
强海杂波与海面目标的复杂特性使得海面目标回波微弱,有效的海杂波抑制和稳健快速的目标检测是雷达对海上目标探测需考虑的重要因素。然而,现有的海面目标检测算法对于复杂环境下的目标检测性能有限,环境和目标特性适应性差。该文设计了一种杂波抑制和目标检测融合网络(INet),通过层归一化-传递和连接方法提取关键目标特征,采用注意力网络抑制杂波和增强目标,构建跨阶段局部残差网络保证检测网络的轻量化和准确性。基于导航雷达在多种观测条件下采集的回波数据,构建了海面目标雷达图像数据集;通过模型的预训练和平面位置显示器(PPI)图像的帧间积累对INet进行了优化,得到了Optimized INet(O-INet)模型。经过多种天气条件下实测数据测试和验证,并与YOLOv3, YOLOv4,双参数CFAR和二维CA-CFAR对比后证明,所提方法在提高检测概率、降低虚警率和复杂条件下的强泛化能力有显著优势。 强海杂波与海面目标的复杂特性使得海面目标回波微弱,有效的海杂波抑制和稳健快速的目标检测是雷达对海上目标探测需考虑的重要因素。然而,现有的海面目标检测算法对于复杂环境下的目标检测性能有限,环境和目标特性适应性差。该文设计了一种杂波抑制和目标检测融合网络(INet),通过层归一化-传递和连接方法提取关键目标特征,采用注意力网络抑制杂波和增强目标,构建跨阶段局部残差网络保证检测网络的轻量化和准确性。基于导航雷达在多种观测条件下采集的回波数据,构建了海面目标雷达图像数据集;通过模型的预训练和平面位置显示器(PPI)图像的帧间积累对INet进行了优化,得到了Optimized INet(O-INet)模型。经过多种天气条件下实测数据测试和验证,并与YOLOv3, YOLOv4,双参数CFAR和二维CA-CFAR对比后证明,所提方法在提高检测概率、降低虚警率和复杂条件下的强泛化能力有显著优势。






2020, 9(4): 654-663.
摘要:
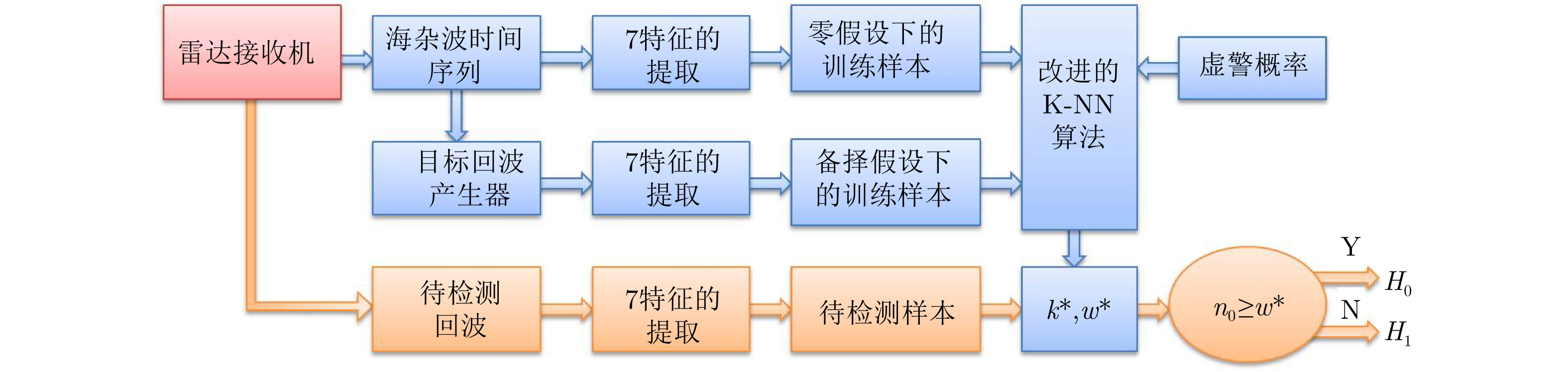
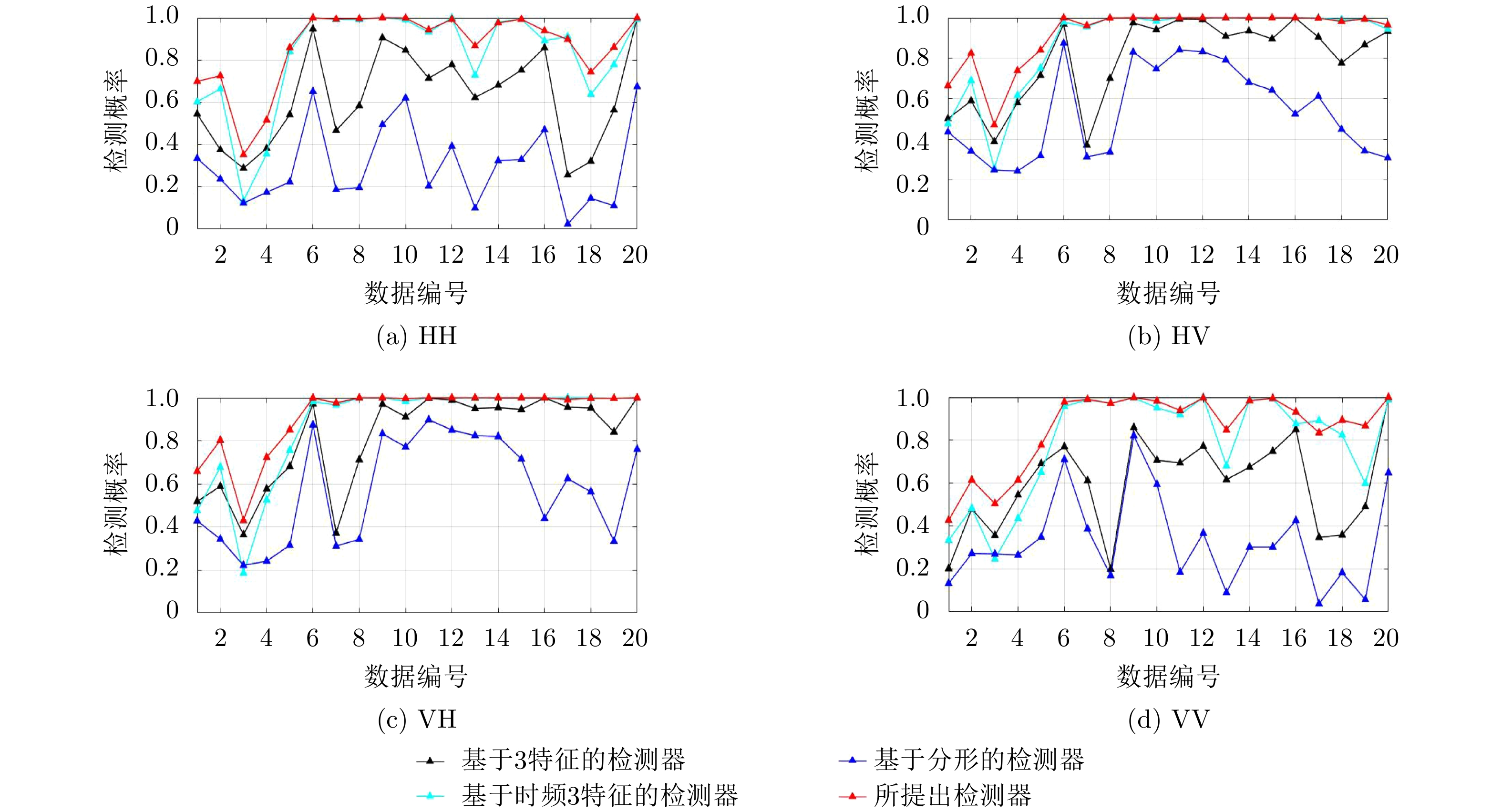
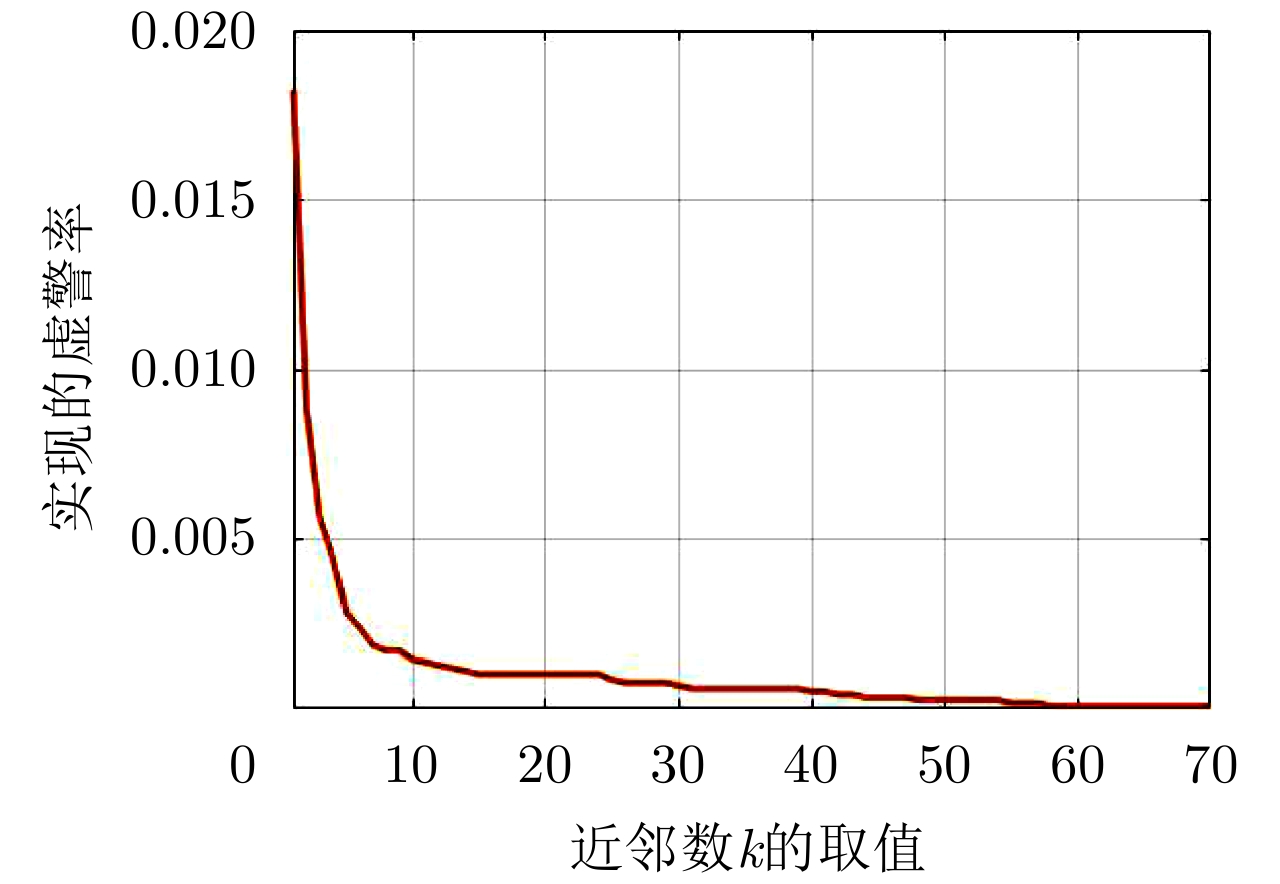
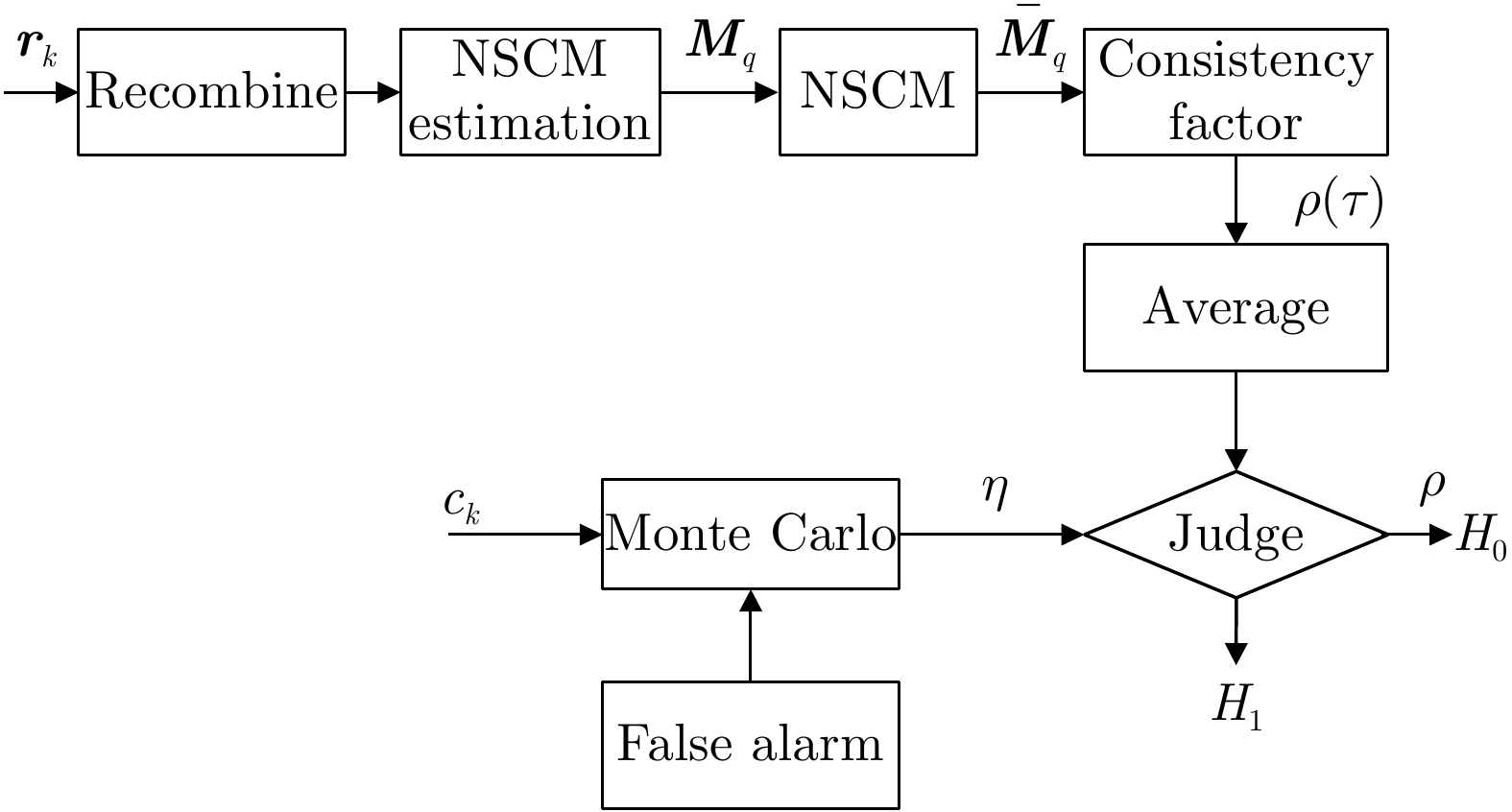
由于高分辨海杂波具有复杂的特性以及海面小目标具有多样性,没有精确的简单统计模型可以较好地描述海杂波和目标回波时间序列,这导致目标检测遇到了很多阻碍。为了区分海杂波和目标回波,分别提取它们的特征将检测问题转化为特征空间中的分类问题是一种有效的方法。基于特征的检测可以归结为在特征空间中的一种2元假设检验问题,但是其有两个问题需要解决:一是目标回波数据远少于杂波数据;二是虚警概率不可控。为了解决第1个问题,一种典型小目标的仿真回波产生器被用于产生充足的典型目标回波数据,以辅佐后续检测器的设计。K近邻(K-NN)是一种简单有效的分类方法,但是因为无法精确地控制虚警率而不能直接在目标检测中使用。该文提出一种基于改进K-NN的海面小目标检测方法,可以很好地实现可控虚警。经IPIX雷达数据集验证,所提出的方法在观测时间分别为0.512 s和1.024 s时获得了85.1%和89.2%的检测概率,相比现有的检测器获得了7%和5%的提升,具有良好的检测效果和稳定性。 由于高分辨海杂波具有复杂的特性以及海面小目标具有多样性,没有精确的简单统计模型可以较好地描述海杂波和目标回波时间序列,这导致目标检测遇到了很多阻碍。为了区分海杂波和目标回波,分别提取它们的特征将检测问题转化为特征空间中的分类问题是一种有效的方法。基于特征的检测可以归结为在特征空间中的一种2元假设检验问题,但是其有两个问题需要解决:一是目标回波数据远少于杂波数据;二是虚警概率不可控。为了解决第1个问题,一种典型小目标的仿真回波产生器被用于产生充足的典型目标回波数据,以辅佐后续检测器的设计。K近邻(K-NN)是一种简单有效的分类方法,但是因为无法精确地控制虚警率而不能直接在目标检测中使用。该文提出一种基于改进K-NN的海面小目标检测方法,可以很好地实现可控虚警。经IPIX雷达数据集验证,所提出的方法在观测时间分别为0.512 s和1.024 s时获得了85.1%和89.2%的检测概率,相比现有的检测器获得了7%和5%的提升,具有良好的检测效果和稳定性。
由于高分辨海杂波具有复杂的特性以及海面小目标具有多样性,没有精确的简单统计模型可以较好地描述海杂波和目标回波时间序列,这导致目标检测遇到了很多阻碍。为了区分海杂波和目标回波,分别提取它们的特征将检测问题转化为特征空间中的分类问题是一种有效的方法。基于特征的检测可以归结为在特征空间中的一种2元假设检验问题,但是其有两个问题需要解决:一是目标回波数据远少于杂波数据;二是虚警概率不可控。为了解决第1个问题,一种典型小目标的仿真回波产生器被用于产生充足的典型目标回波数据,以辅佐后续检测器的设计。K近邻(K-NN)是一种简单有效的分类方法,但是因为无法精确地控制虚警率而不能直接在目标检测中使用。该文提出一种基于改进K-NN的海面小目标检测方法,可以很好地实现可控虚警。经IPIX雷达数据集验证,所提出的方法在观测时间分别为0.512 s和1.024 s时获得了85.1%和89.2%的检测概率,相比现有的检测器获得了7%和5%的提升,具有良好的检测效果和稳定性。 由于高分辨海杂波具有复杂的特性以及海面小目标具有多样性,没有精确的简单统计模型可以较好地描述海杂波和目标回波时间序列,这导致目标检测遇到了很多阻碍。为了区分海杂波和目标回波,分别提取它们的特征将检测问题转化为特征空间中的分类问题是一种有效的方法。基于特征的检测可以归结为在特征空间中的一种2元假设检验问题,但是其有两个问题需要解决:一是目标回波数据远少于杂波数据;二是虚警概率不可控。为了解决第1个问题,一种典型小目标的仿真回波产生器被用于产生充足的典型目标回波数据,以辅佐后续检测器的设计。K近邻(K-NN)是一种简单有效的分类方法,但是因为无法精确地控制虚警率而不能直接在目标检测中使用。该文提出一种基于改进K-NN的海面小目标检测方法,可以很好地实现可控虚警。经IPIX雷达数据集验证,所提出的方法在观测时间分别为0.512 s和1.024 s时获得了85.1%和89.2%的检测概率,相比现有的检测器获得了7%和5%的提升,具有良好的检测效果和稳定性。

2020, 9(4): 664-673.
摘要:
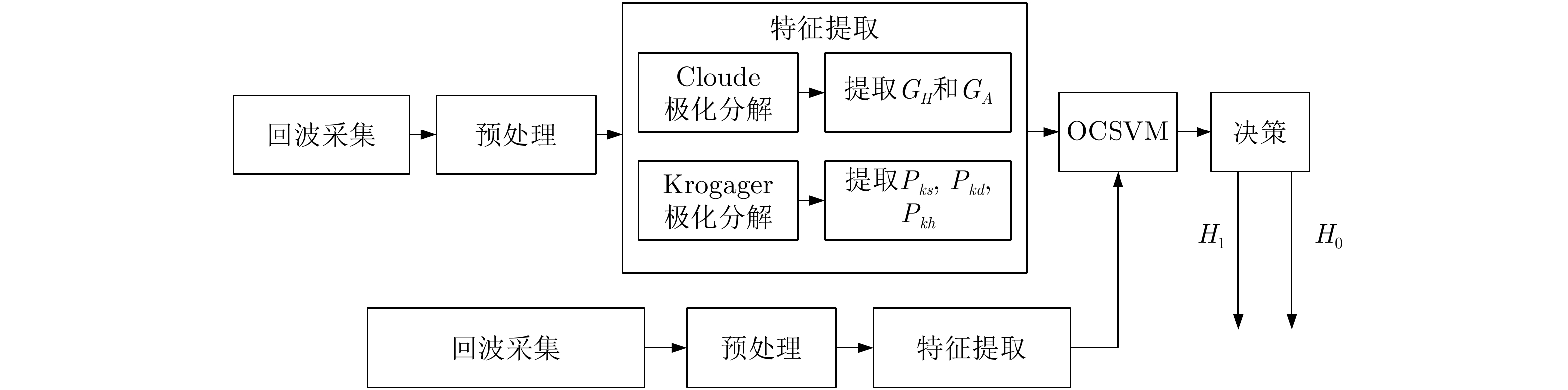
该文从全极化体制角度出发,提出一种基于极化联合特征的海面目标检测方法。首先基于极化协方差矩阵,通过Cloude特征分解,提取表征回波随机程度的极化熵和反熵的数学期望;接着直接基于极化散射矩阵,通过Krogager特征分解,提取表征回波中极化散射分量结构组成的球散射体分量、二面角散射体分量和螺旋体散射分量的归一化系数;由提取的特征构成五维特征空间,利用主成分分析(PCA)降维证明所提特征具有良好的可分性,最后采用一类支持向量机(OCSVM)对目标和杂波进行识别。所提方法分别从极化相干和非相干分解两个角度出发,通过两种不同的极化分解方式提取特征,在一定程度上解决了高海情下基于单一极化分解方法存在的检测效果不理想的问题。通过IPIX实测数据验证所提方法具有良好的检测能力。 该文从全极化体制角度出发,提出一种基于极化联合特征的海面目标检测方法。首先基于极化协方差矩阵,通过Cloude特征分解,提取表征回波随机程度的极化熵和反熵的数学期望;接着直接基于极化散射矩阵,通过Krogager特征分解,提取表征回波中极化散射分量结构组成的球散射体分量、二面角散射体分量和螺旋体散射分量的归一化系数;由提取的特征构成五维特征空间,利用主成分分析(PCA)降维证明所提特征具有良好的可分性,最后采用一类支持向量机(OCSVM)对目标和杂波进行识别。所提方法分别从极化相干和非相干分解两个角度出发,通过两种不同的极化分解方式提取特征,在一定程度上解决了高海情下基于单一极化分解方法存在的检测效果不理想的问题。通过IPIX实测数据验证所提方法具有良好的检测能力。
该文从全极化体制角度出发,提出一种基于极化联合特征的海面目标检测方法。首先基于极化协方差矩阵,通过Cloude特征分解,提取表征回波随机程度的极化熵和反熵的数学期望;接着直接基于极化散射矩阵,通过Krogager特征分解,提取表征回波中极化散射分量结构组成的球散射体分量、二面角散射体分量和螺旋体散射分量的归一化系数;由提取的特征构成五维特征空间,利用主成分分析(PCA)降维证明所提特征具有良好的可分性,最后采用一类支持向量机(OCSVM)对目标和杂波进行识别。所提方法分别从极化相干和非相干分解两个角度出发,通过两种不同的极化分解方式提取特征,在一定程度上解决了高海情下基于单一极化分解方法存在的检测效果不理想的问题。通过IPIX实测数据验证所提方法具有良好的检测能力。 该文从全极化体制角度出发,提出一种基于极化联合特征的海面目标检测方法。首先基于极化协方差矩阵,通过Cloude特征分解,提取表征回波随机程度的极化熵和反熵的数学期望;接着直接基于极化散射矩阵,通过Krogager特征分解,提取表征回波中极化散射分量结构组成的球散射体分量、二面角散射体分量和螺旋体散射分量的归一化系数;由提取的特征构成五维特征空间,利用主成分分析(PCA)降维证明所提特征具有良好的可分性,最后采用一类支持向量机(OCSVM)对目标和杂波进行识别。所提方法分别从极化相干和非相干分解两个角度出发,通过两种不同的极化分解方式提取特征,在一定程度上解决了高海情下基于单一极化分解方法存在的检测效果不理想的问题。通过IPIX实测数据验证所提方法具有良好的检测能力。

2020, 9(4): 674-683.
摘要:
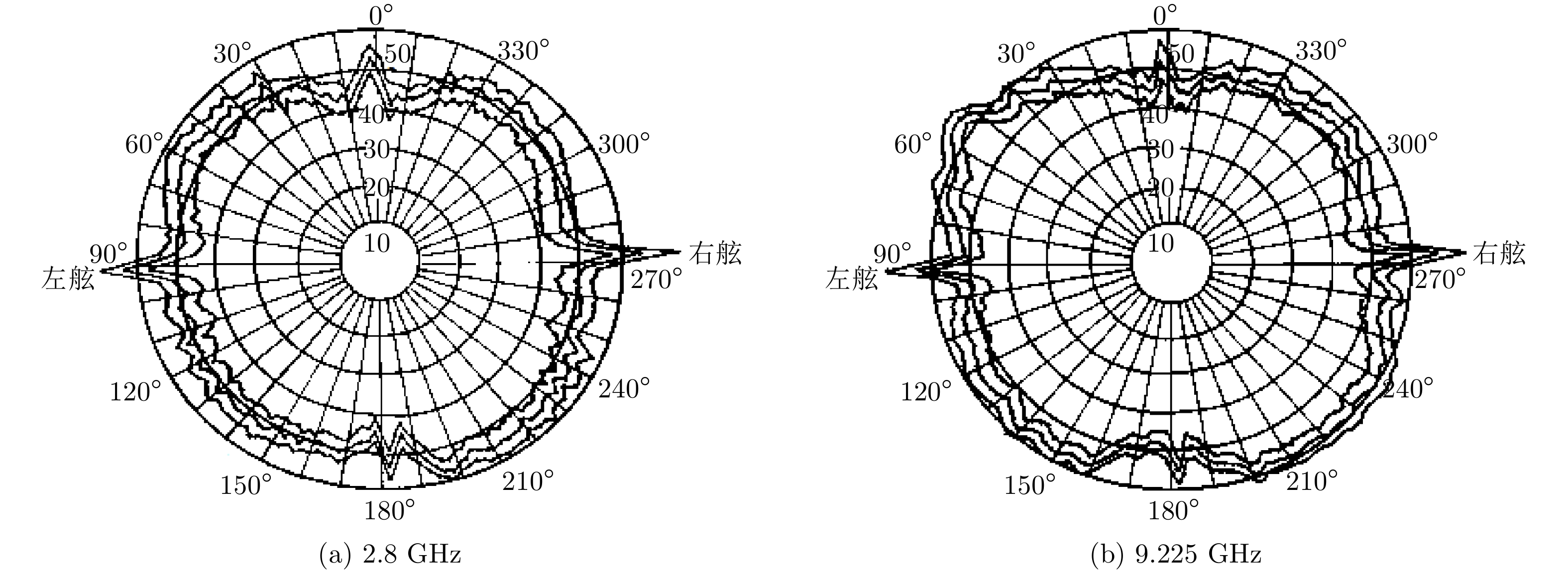
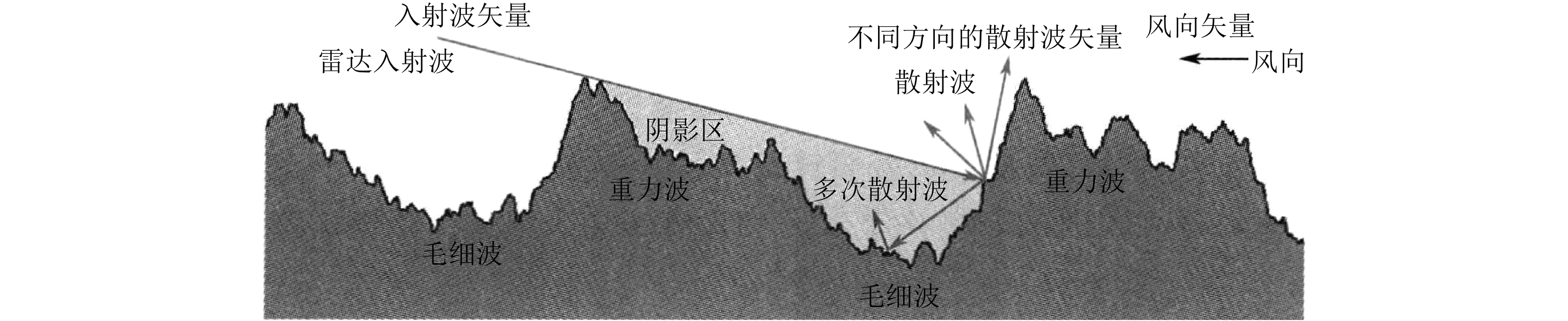
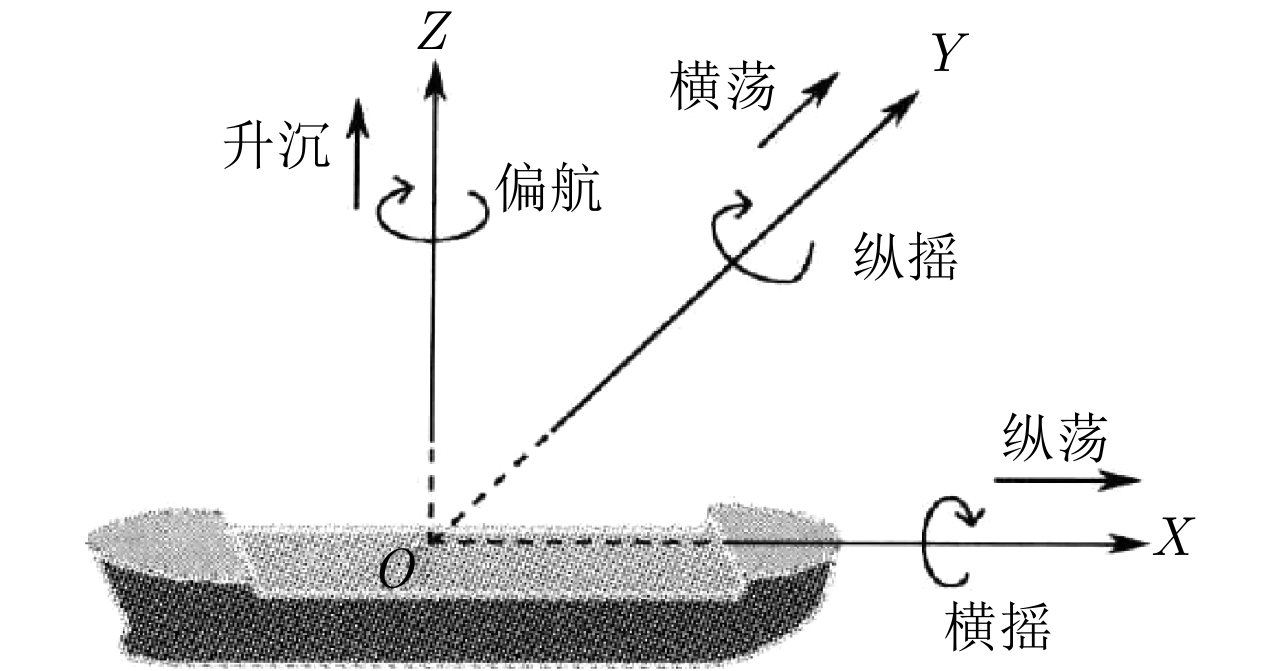
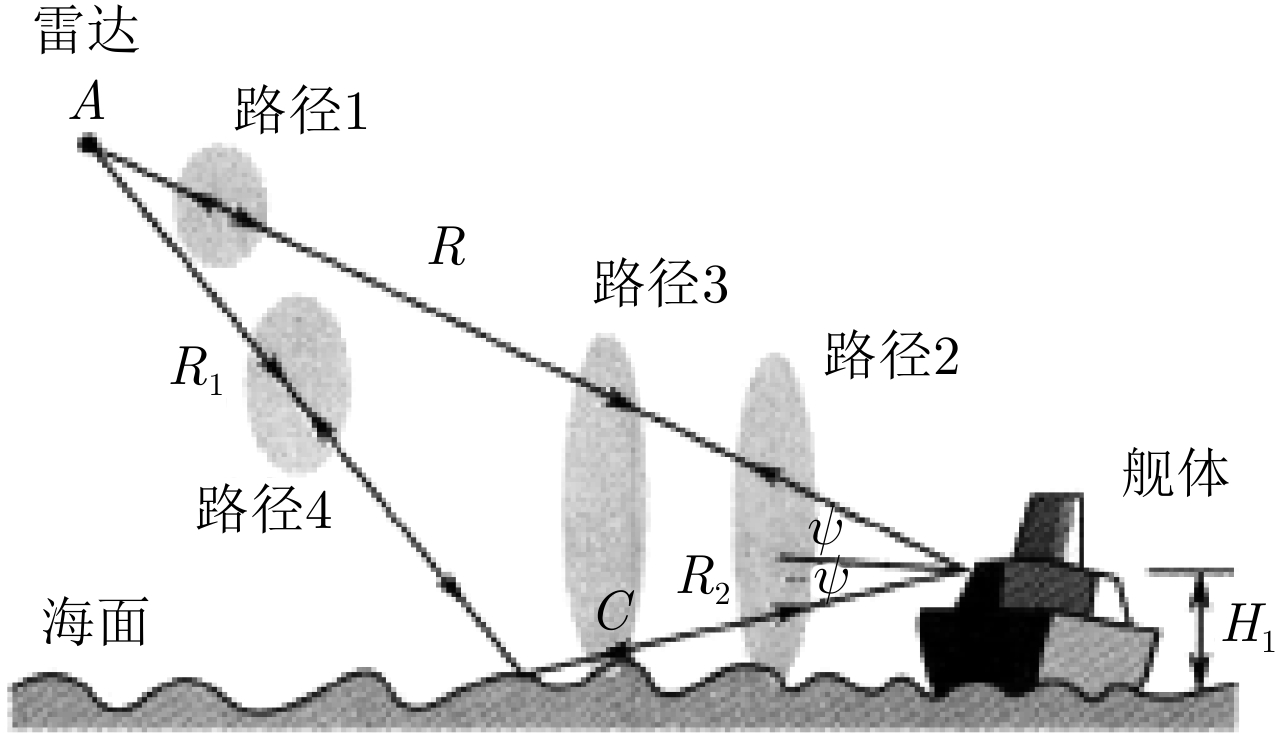
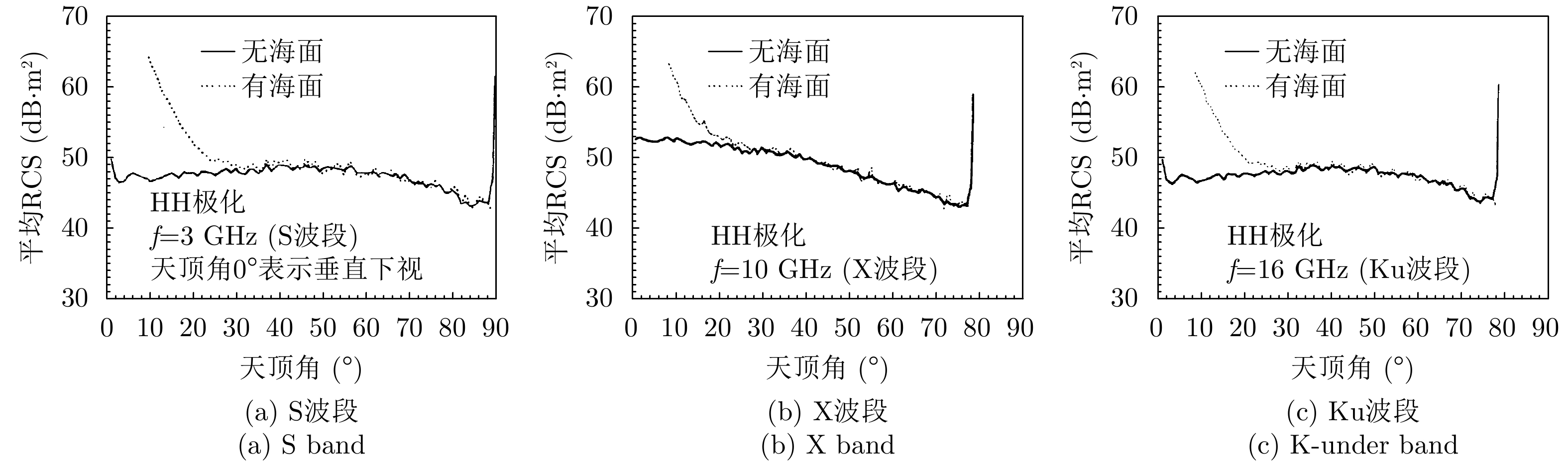
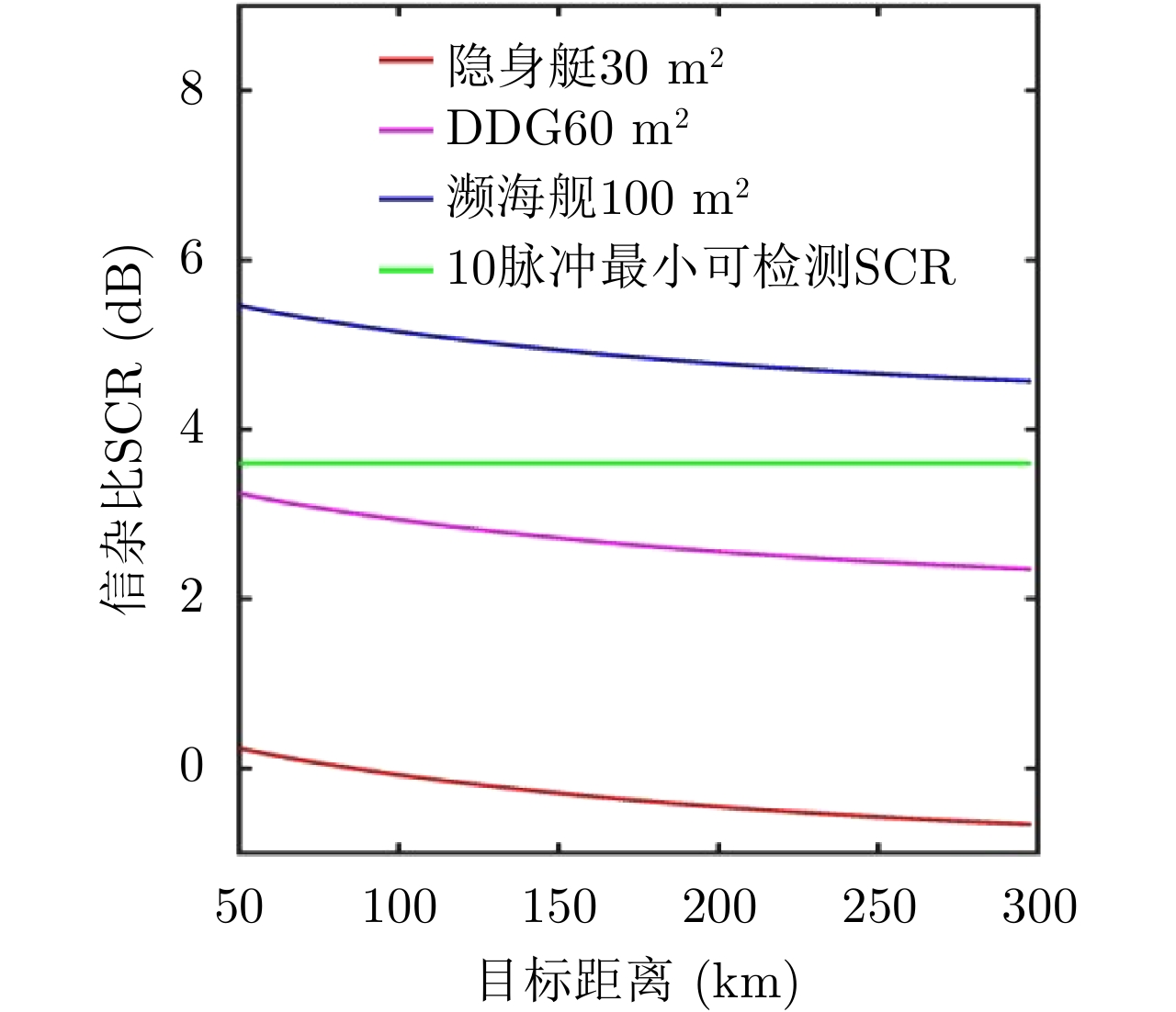
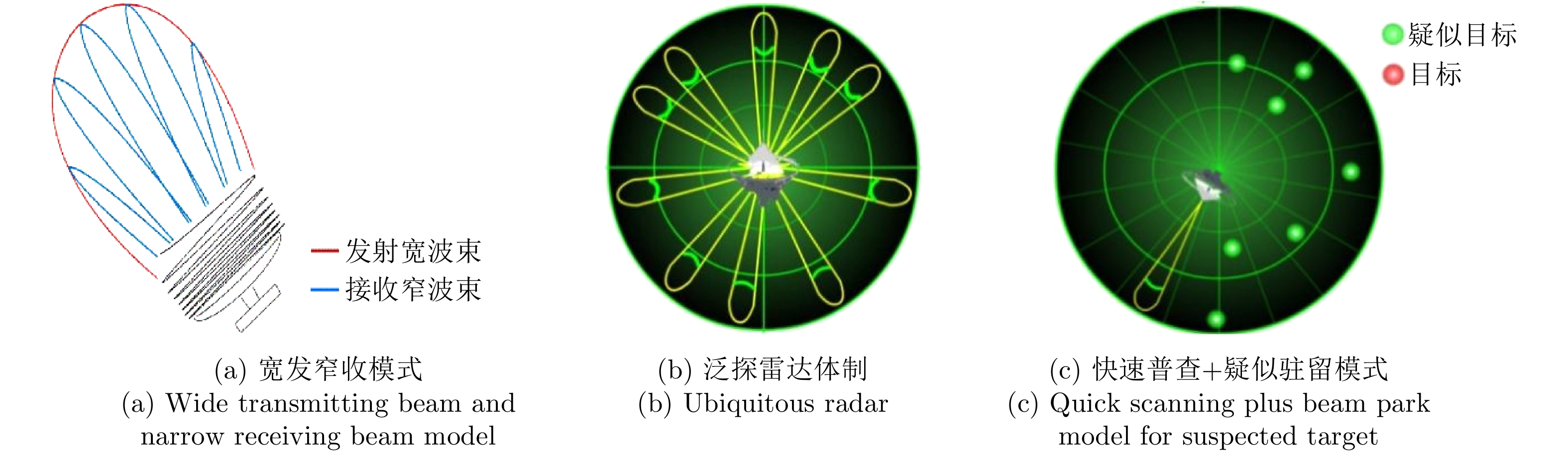
该文围绕雷达对海上目标探测中的目标特性,简述了主要目标特性和模型,以及在目标特性测量和计算中的主要问题,然后从目标、环境、传感器3个角度,讨论了海上目标探测中一些较为关注的目标特性,说明了海上目标特性的多样性、海上环境的复杂多变性、海上目标与环境的相互耦合作用,以及探测海上目标的主要雷达手段和典型应用背景中目标特性需求;最后介绍了雷达目标特性测试与建模技术,提出了目标特性的多维度描述,初步讨论了一些应用。 该文围绕雷达对海上目标探测中的目标特性,简述了主要目标特性和模型,以及在目标特性测量和计算中的主要问题,然后从目标、环境、传感器3个角度,讨论了海上目标探测中一些较为关注的目标特性,说明了海上目标特性的多样性、海上环境的复杂多变性、海上目标与环境的相互耦合作用,以及探测海上目标的主要雷达手段和典型应用背景中目标特性需求;最后介绍了雷达目标特性测试与建模技术,提出了目标特性的多维度描述,初步讨论了一些应用。
该文围绕雷达对海上目标探测中的目标特性,简述了主要目标特性和模型,以及在目标特性测量和计算中的主要问题,然后从目标、环境、传感器3个角度,讨论了海上目标探测中一些较为关注的目标特性,说明了海上目标特性的多样性、海上环境的复杂多变性、海上目标与环境的相互耦合作用,以及探测海上目标的主要雷达手段和典型应用背景中目标特性需求;最后介绍了雷达目标特性测试与建模技术,提出了目标特性的多维度描述,初步讨论了一些应用。 该文围绕雷达对海上目标探测中的目标特性,简述了主要目标特性和模型,以及在目标特性测量和计算中的主要问题,然后从目标、环境、传感器3个角度,讨论了海上目标探测中一些较为关注的目标特性,说明了海上目标特性的多样性、海上环境的复杂多变性、海上目标与环境的相互耦合作用,以及探测海上目标的主要雷达手段和典型应用背景中目标特性需求;最后介绍了雷达目标特性测试与建模技术,提出了目标特性的多维度描述,初步讨论了一些应用。
2020, 9(4): 684-714.
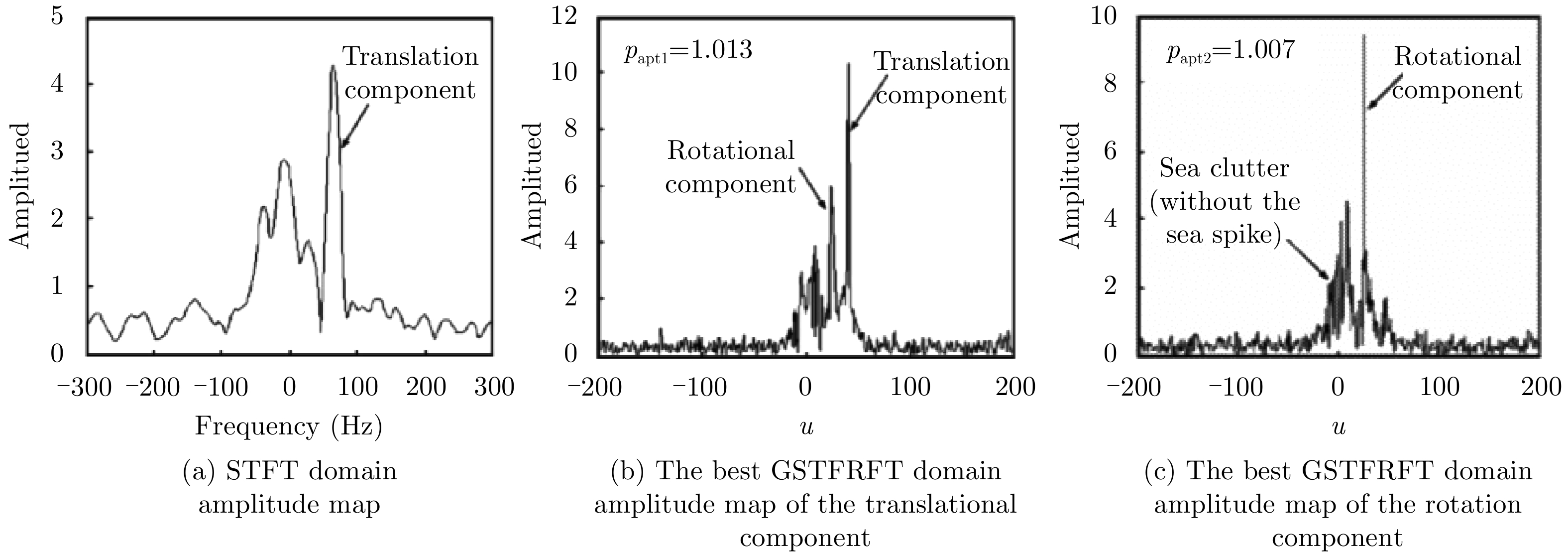
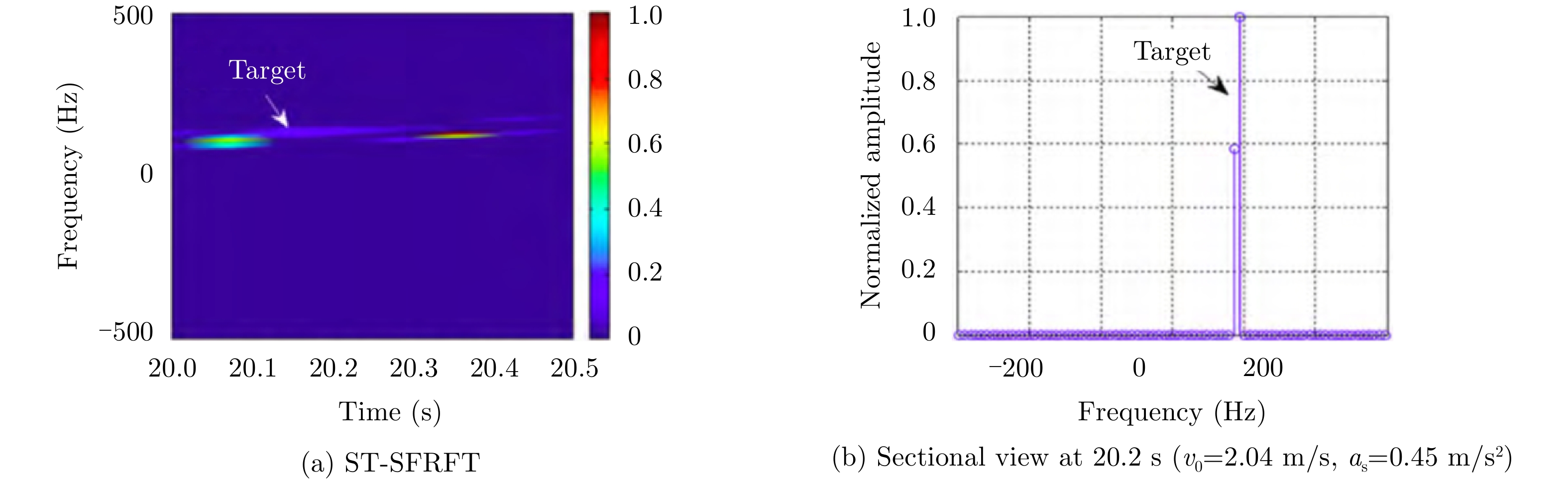
摘要:
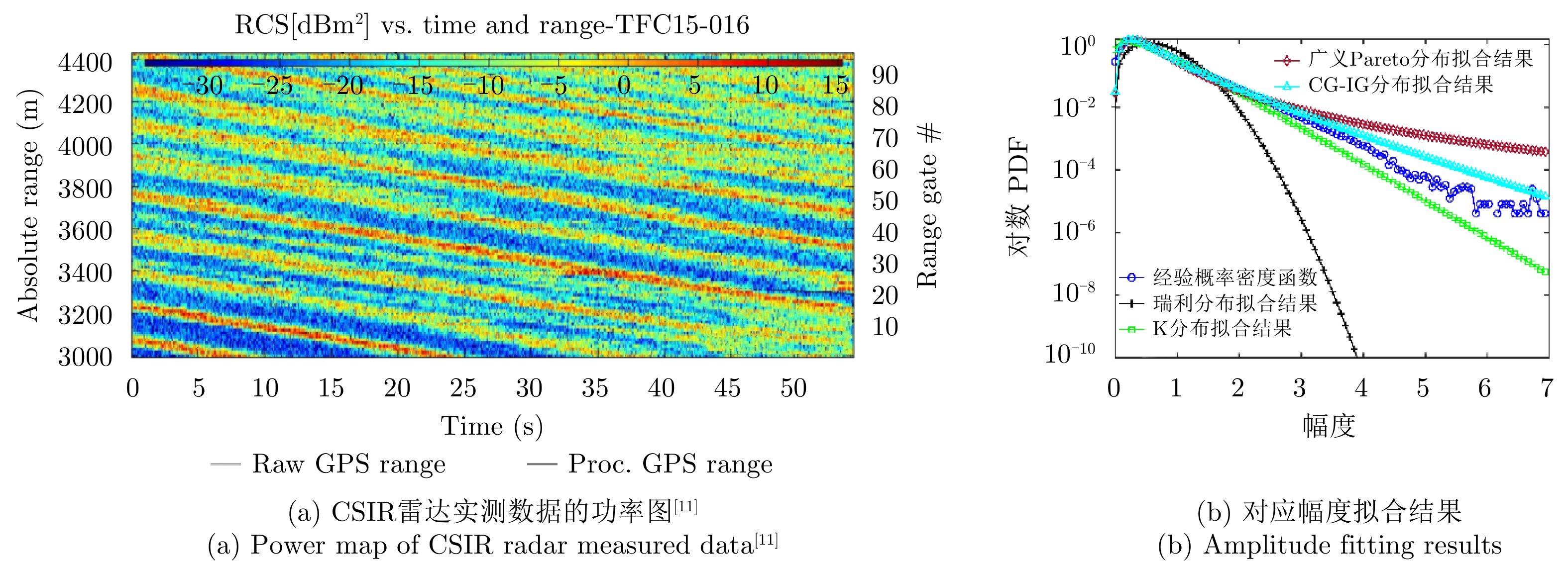
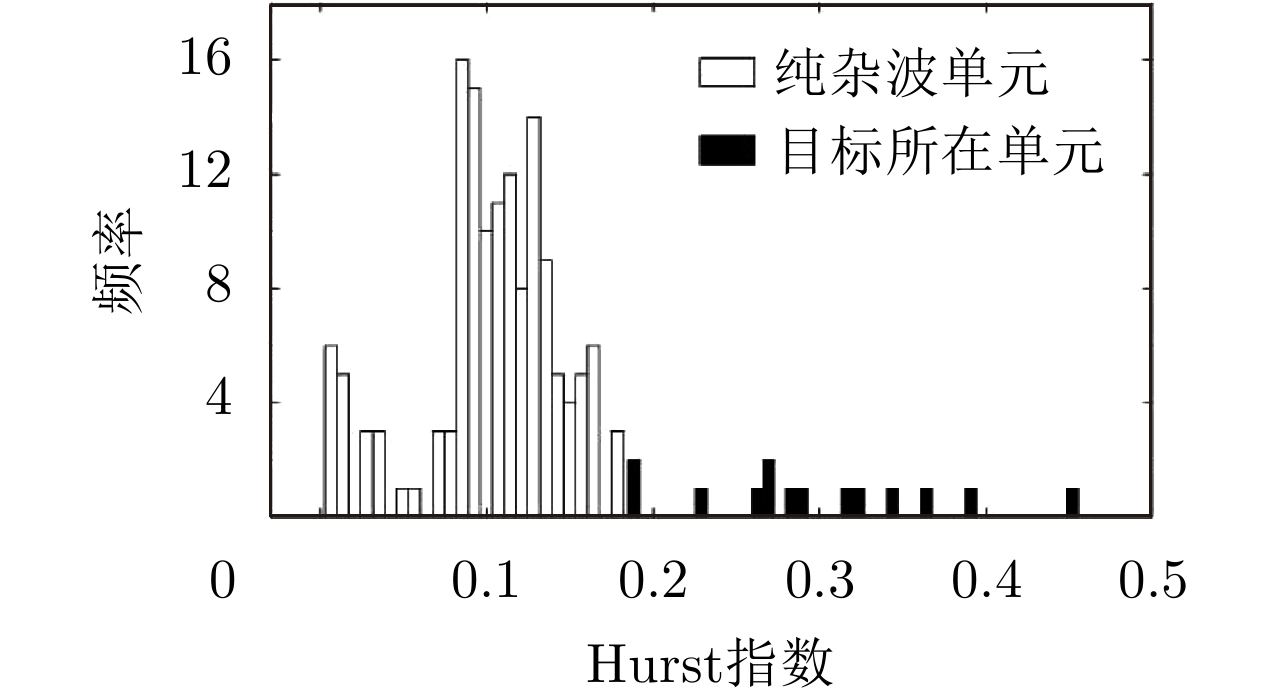
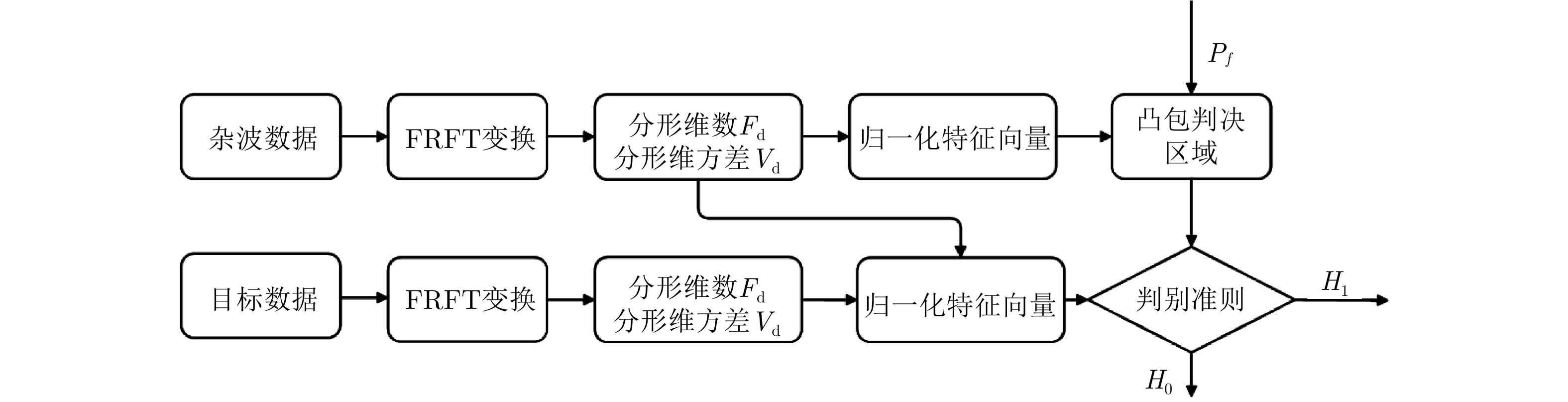
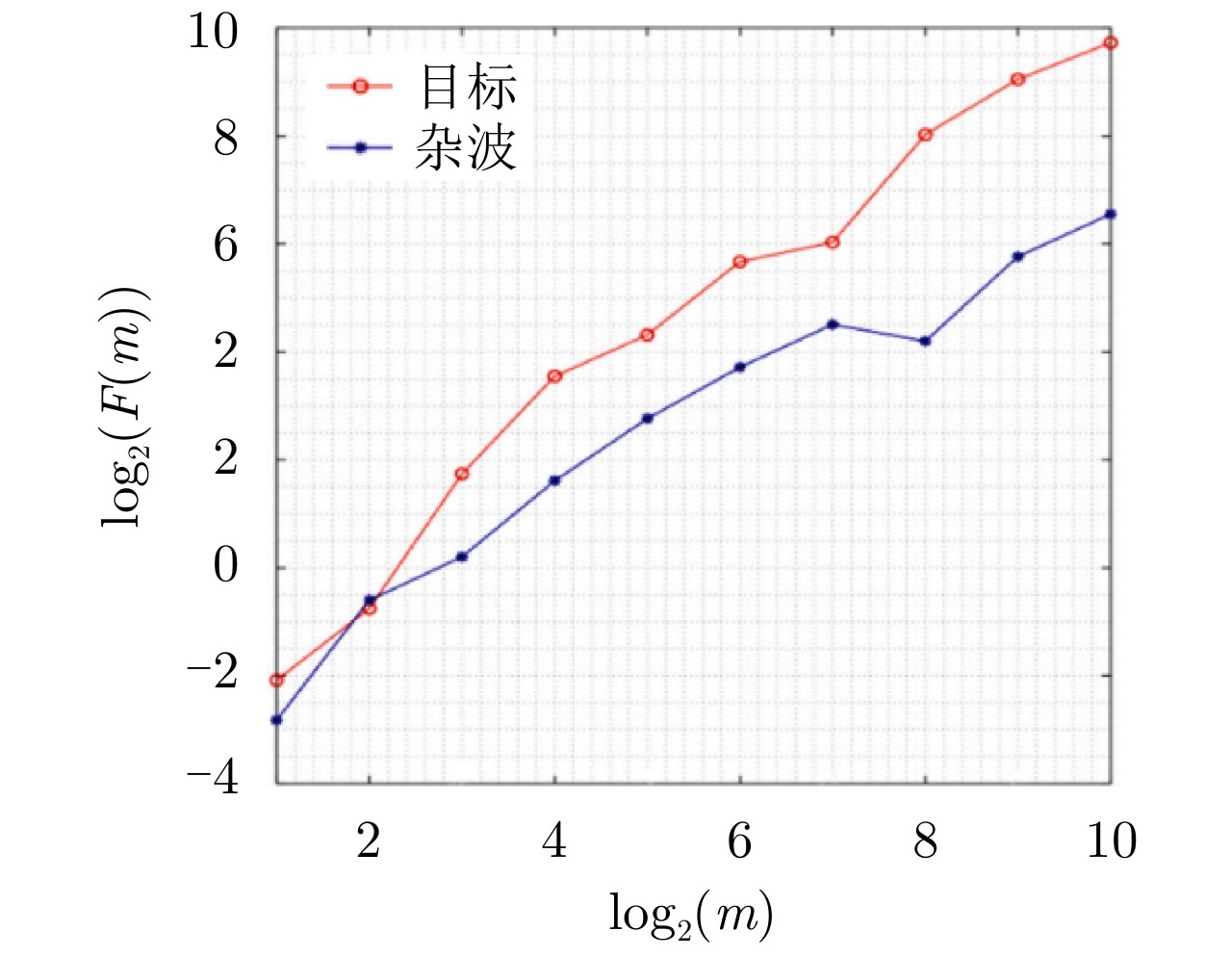
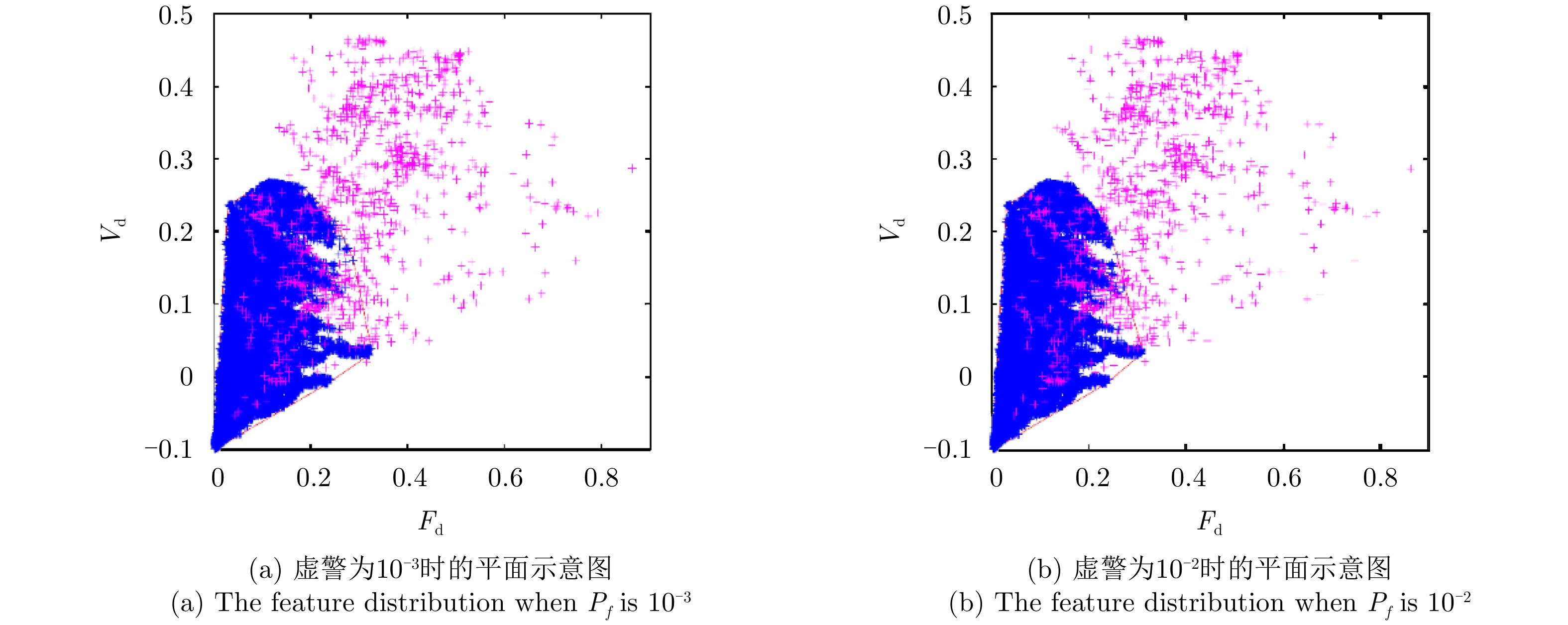
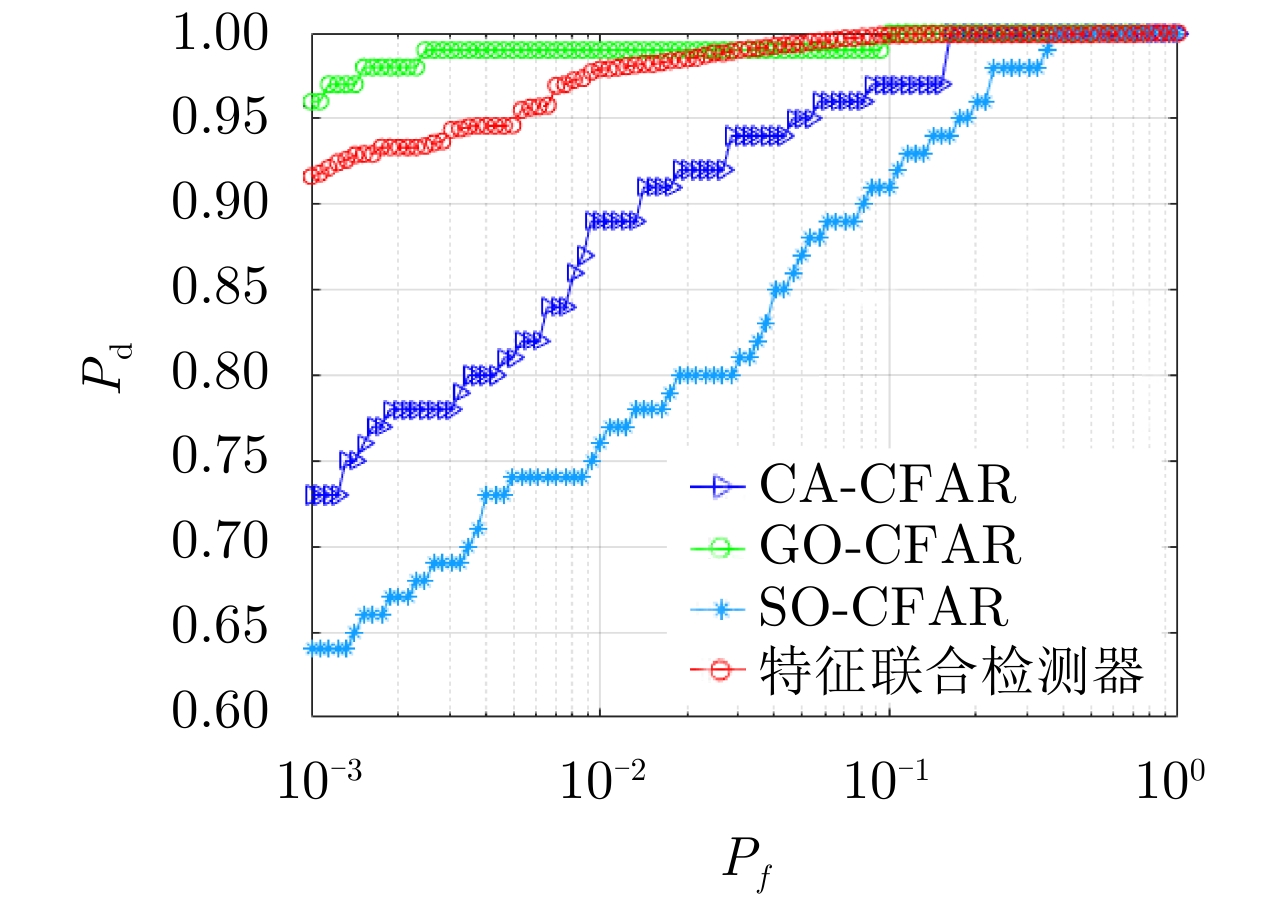
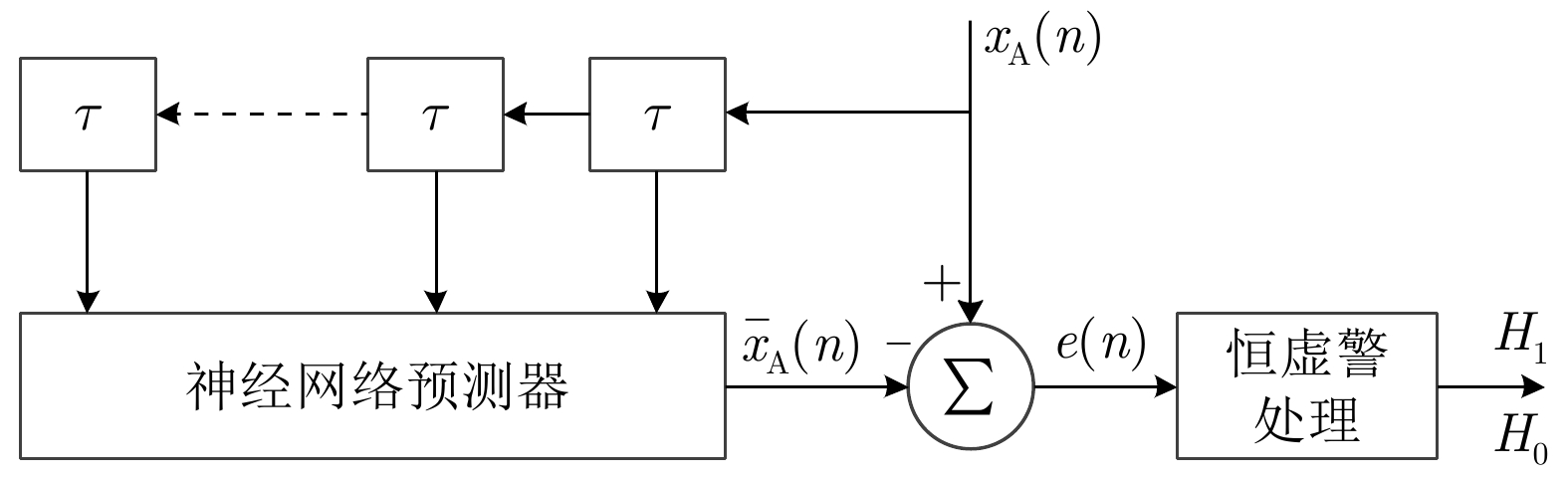
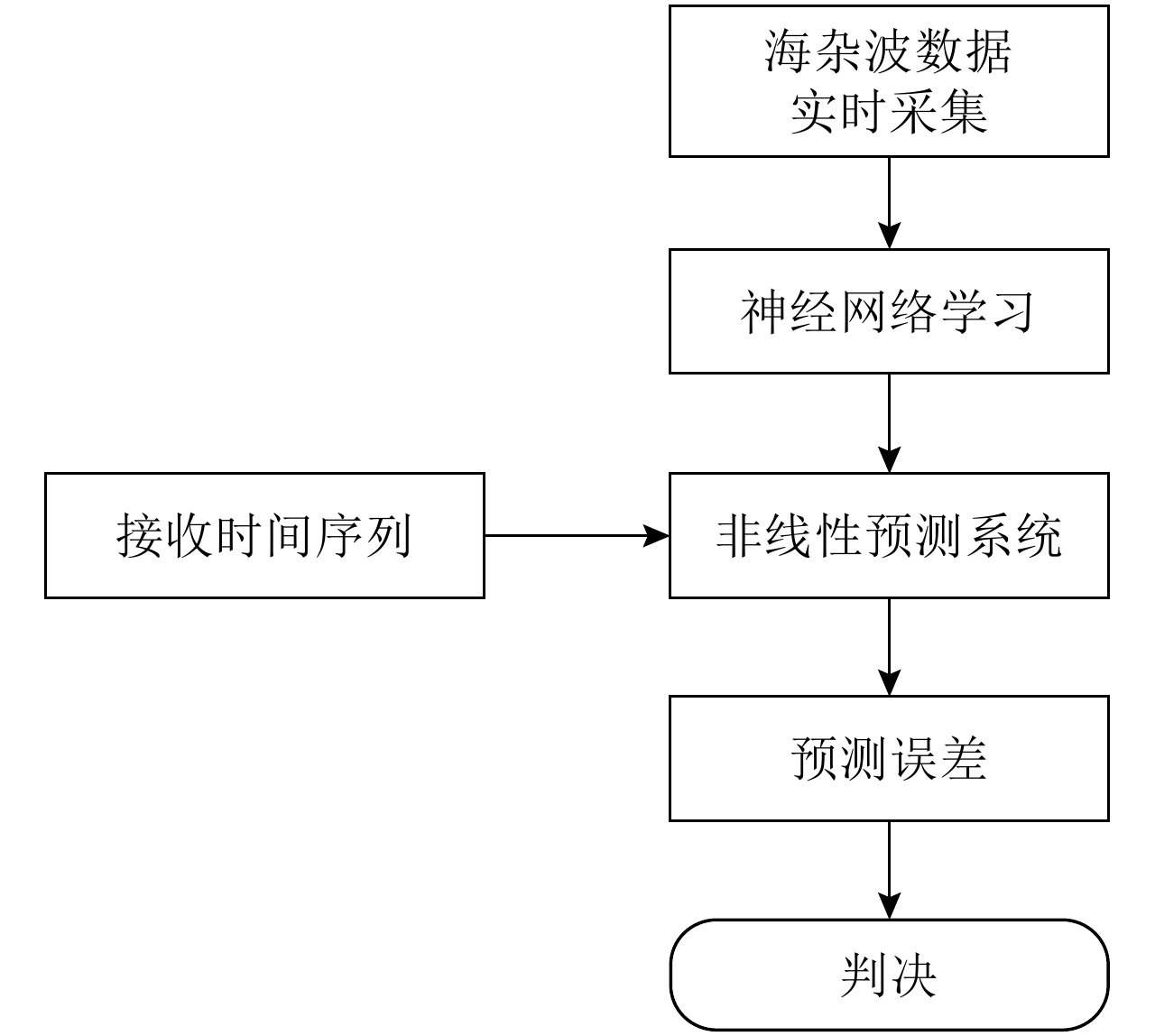
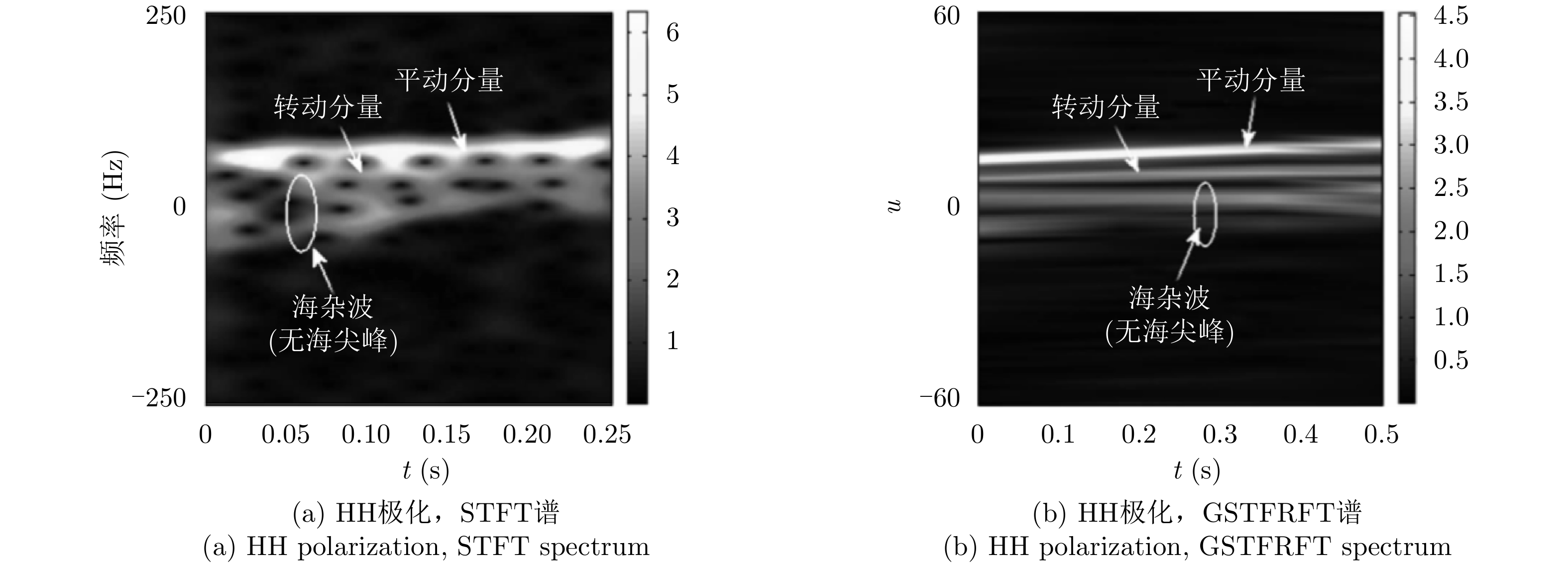
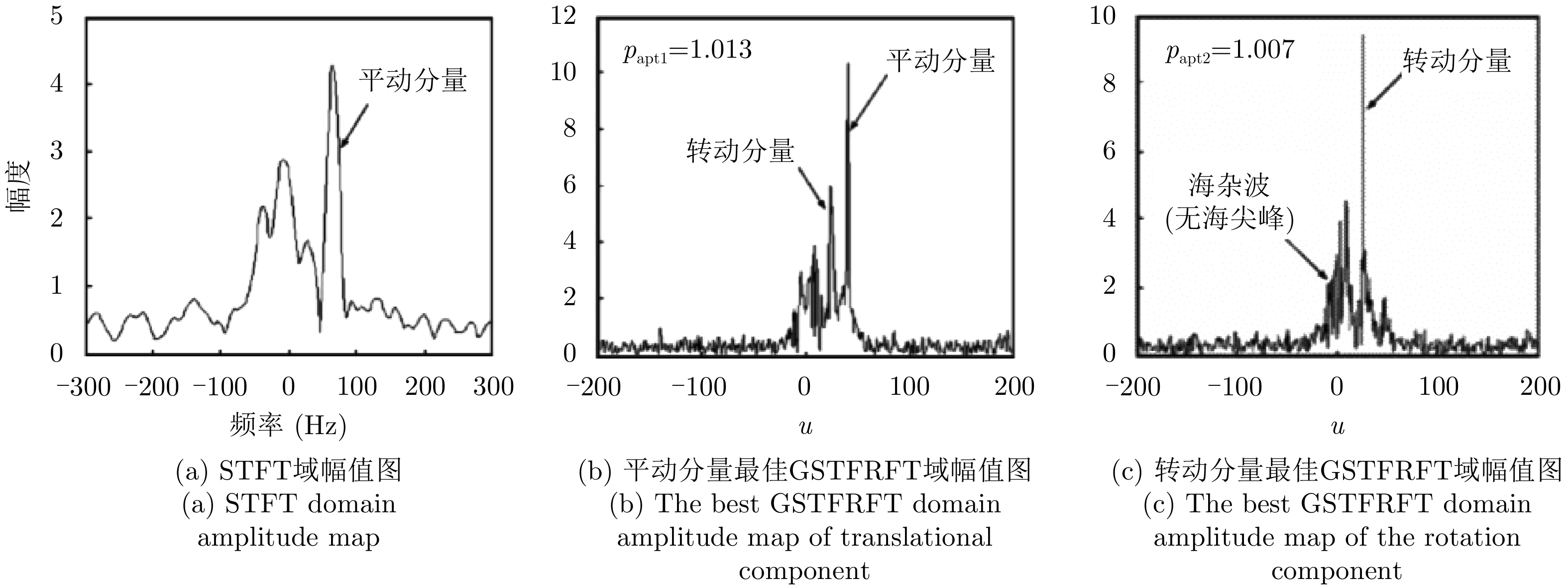
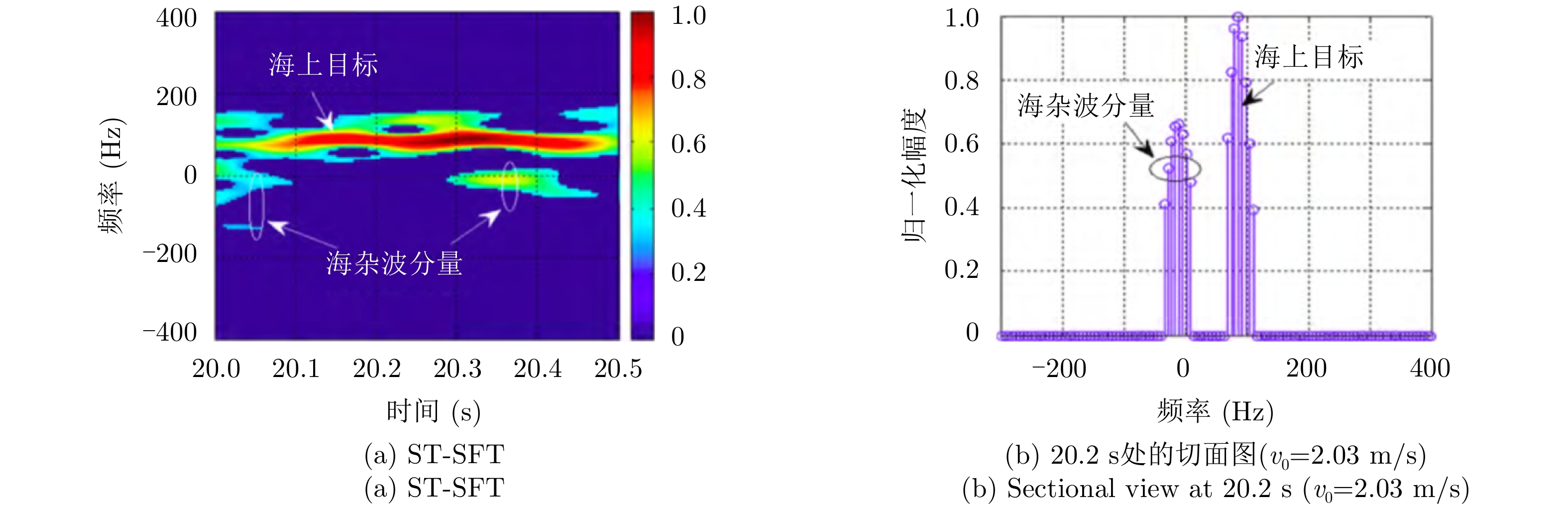
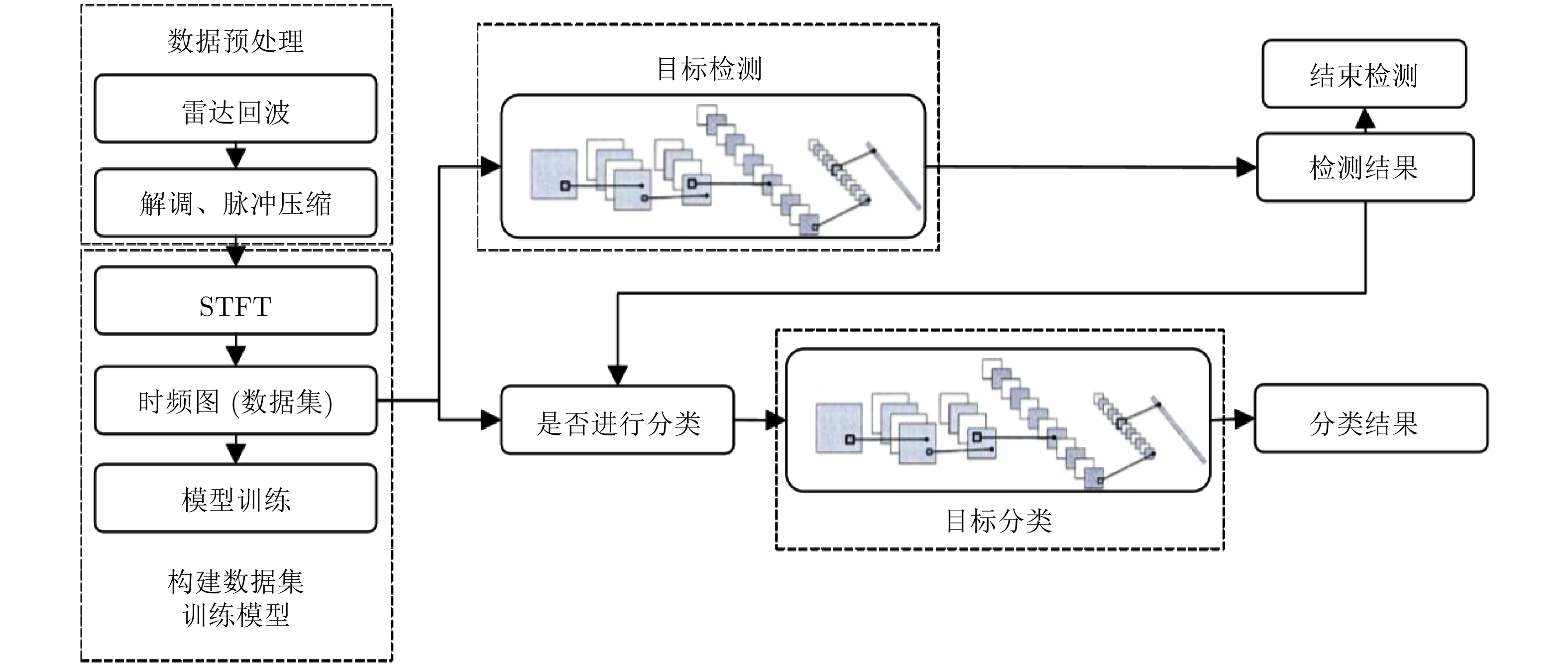
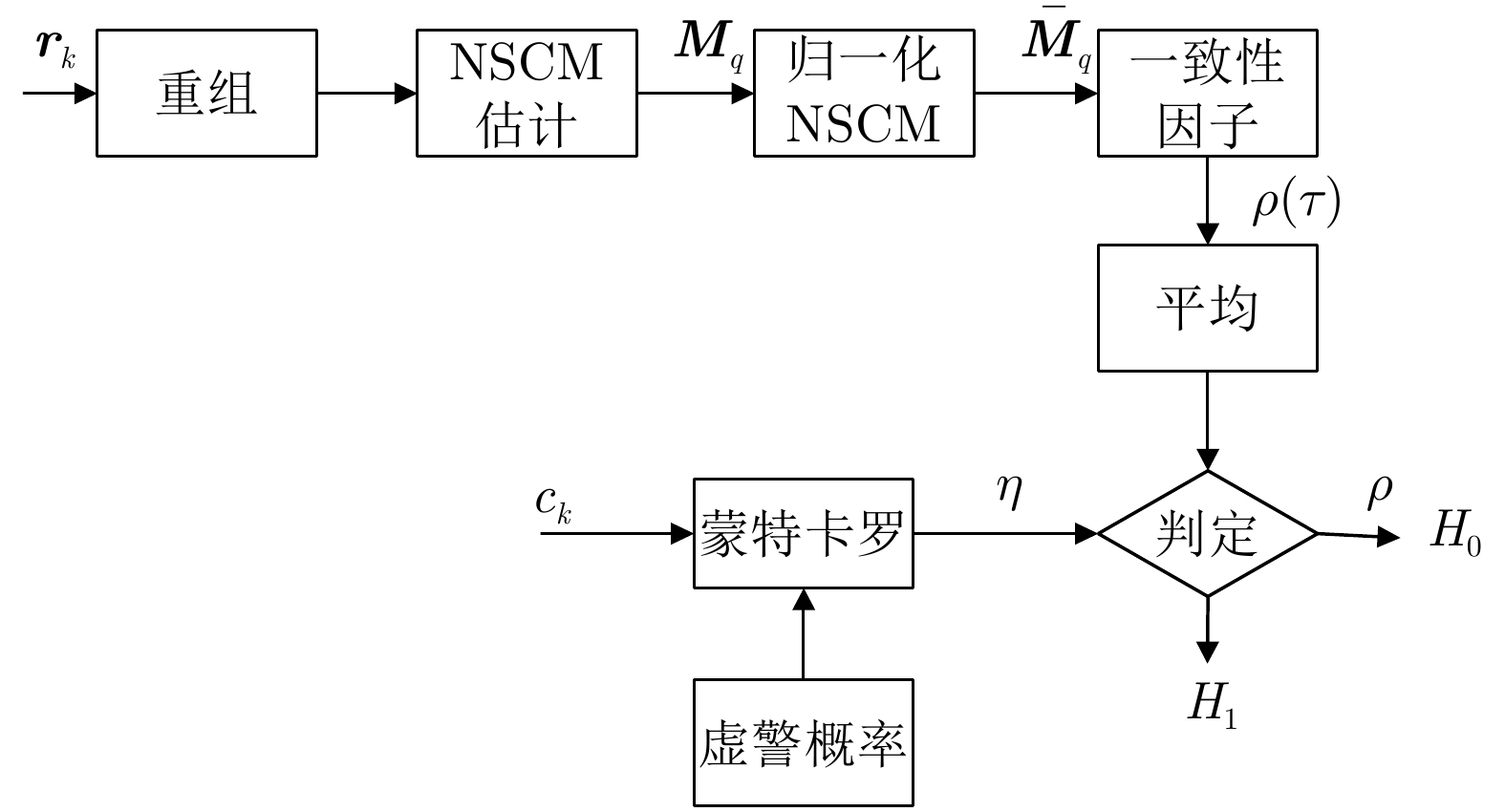
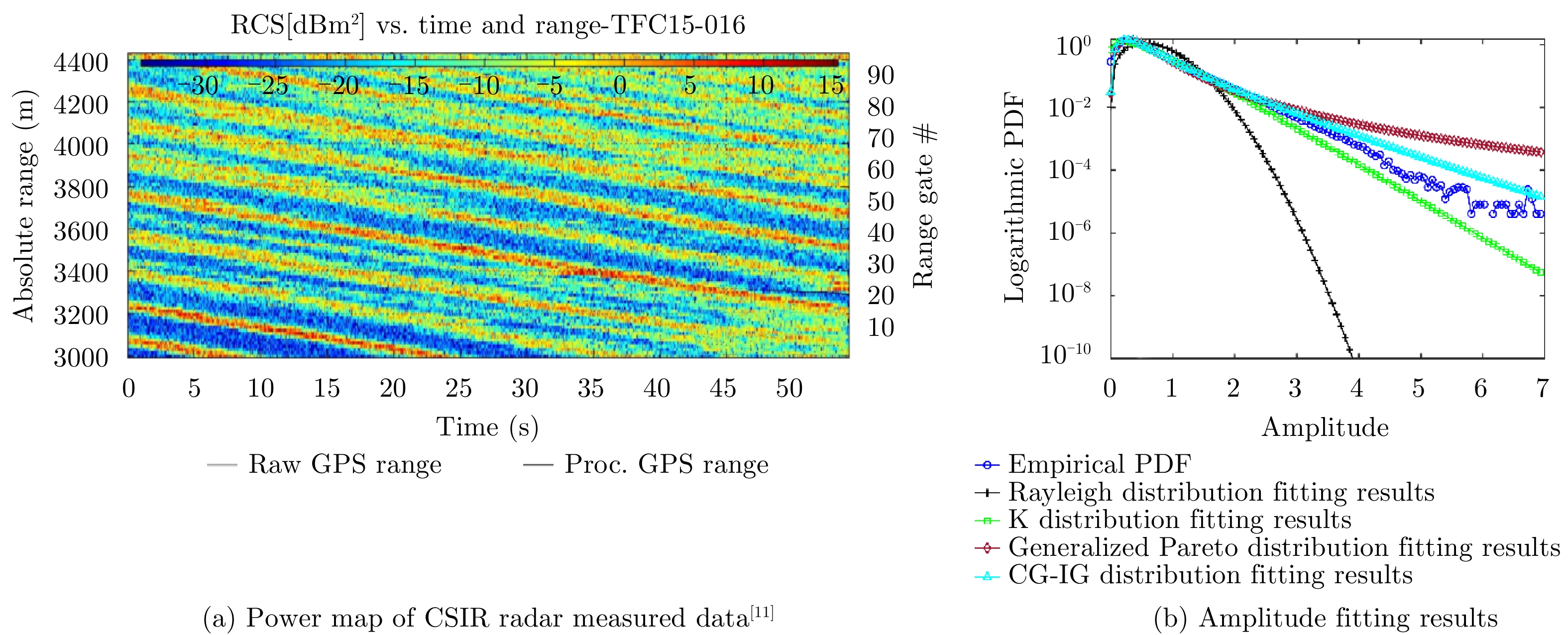
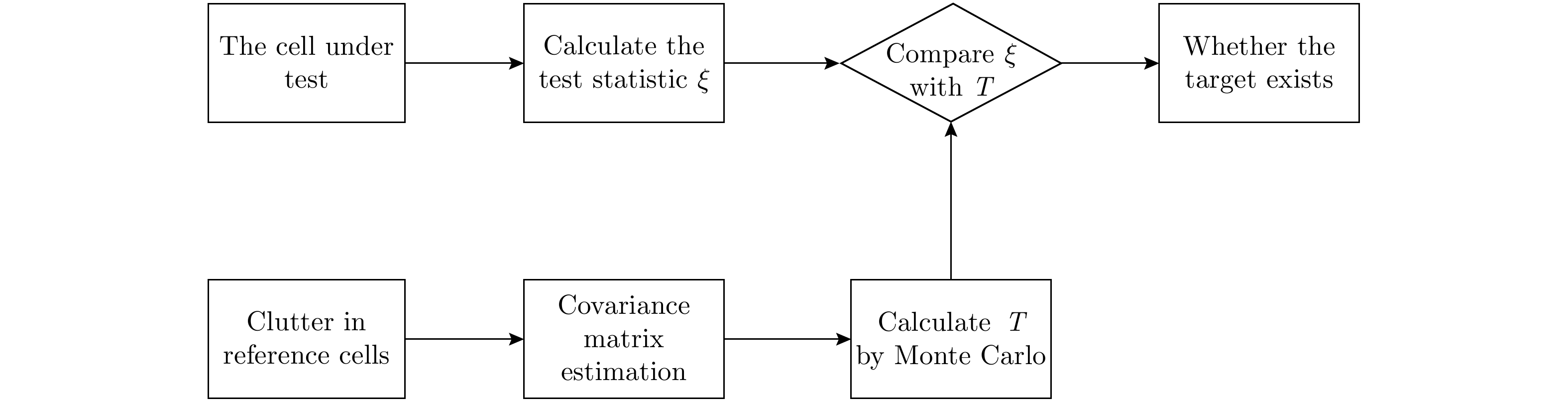
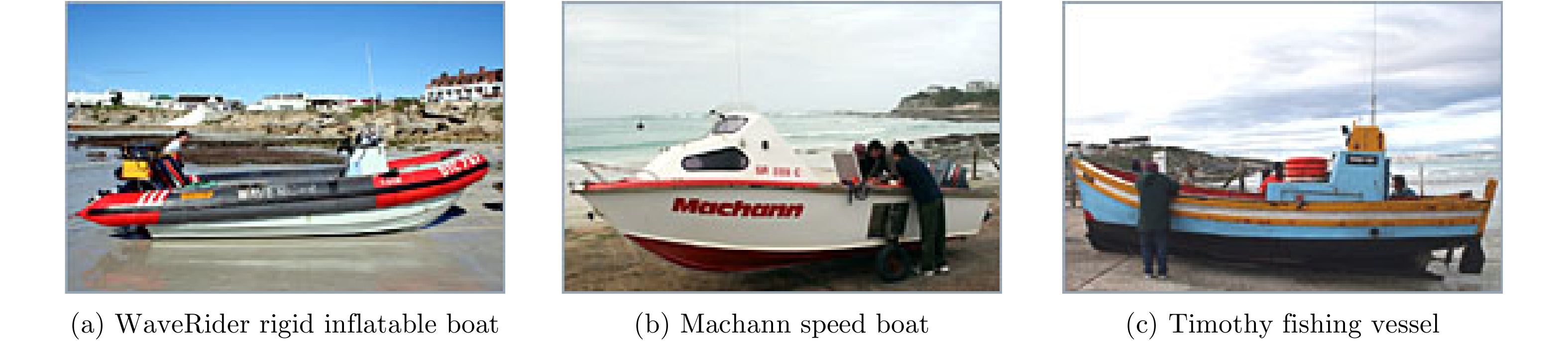
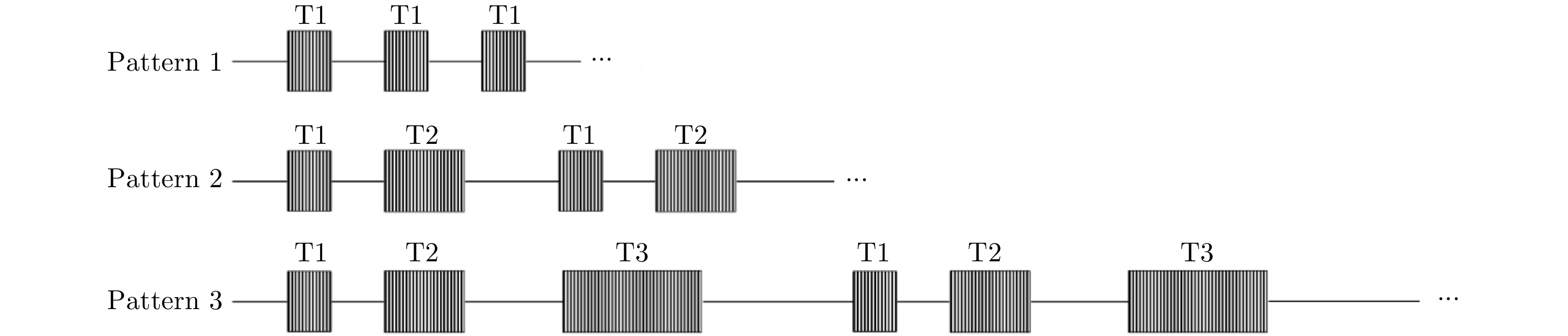
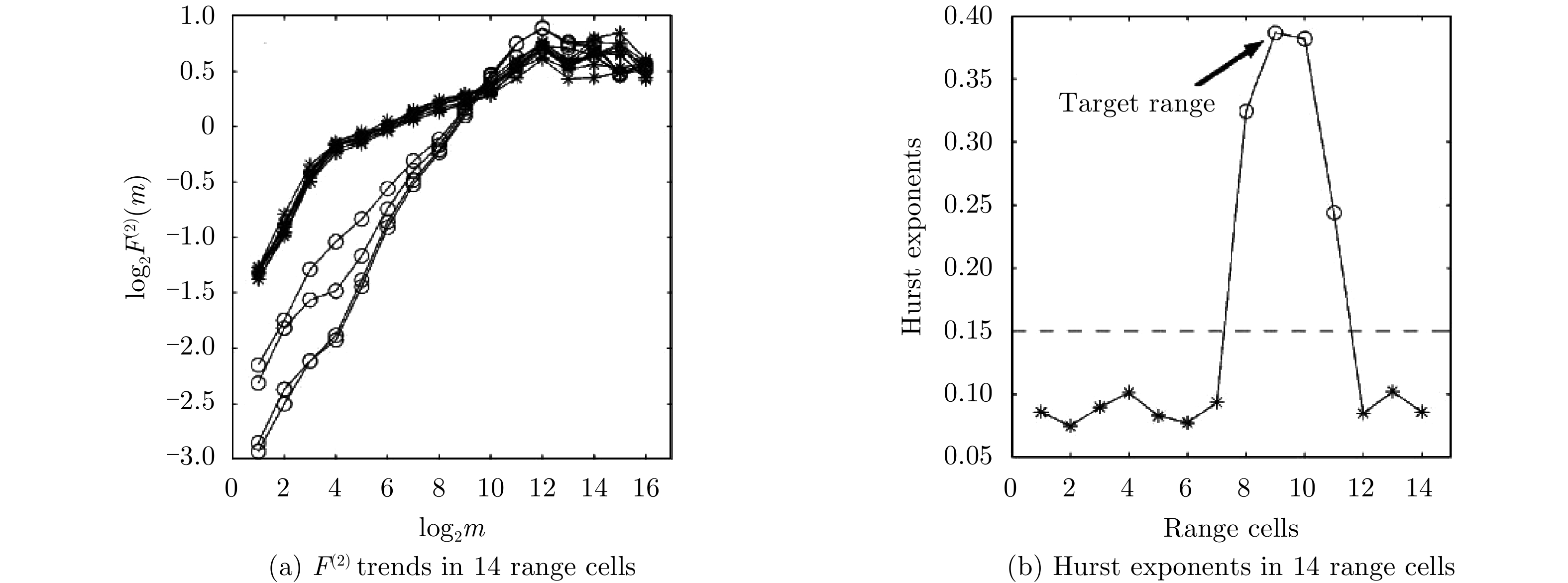
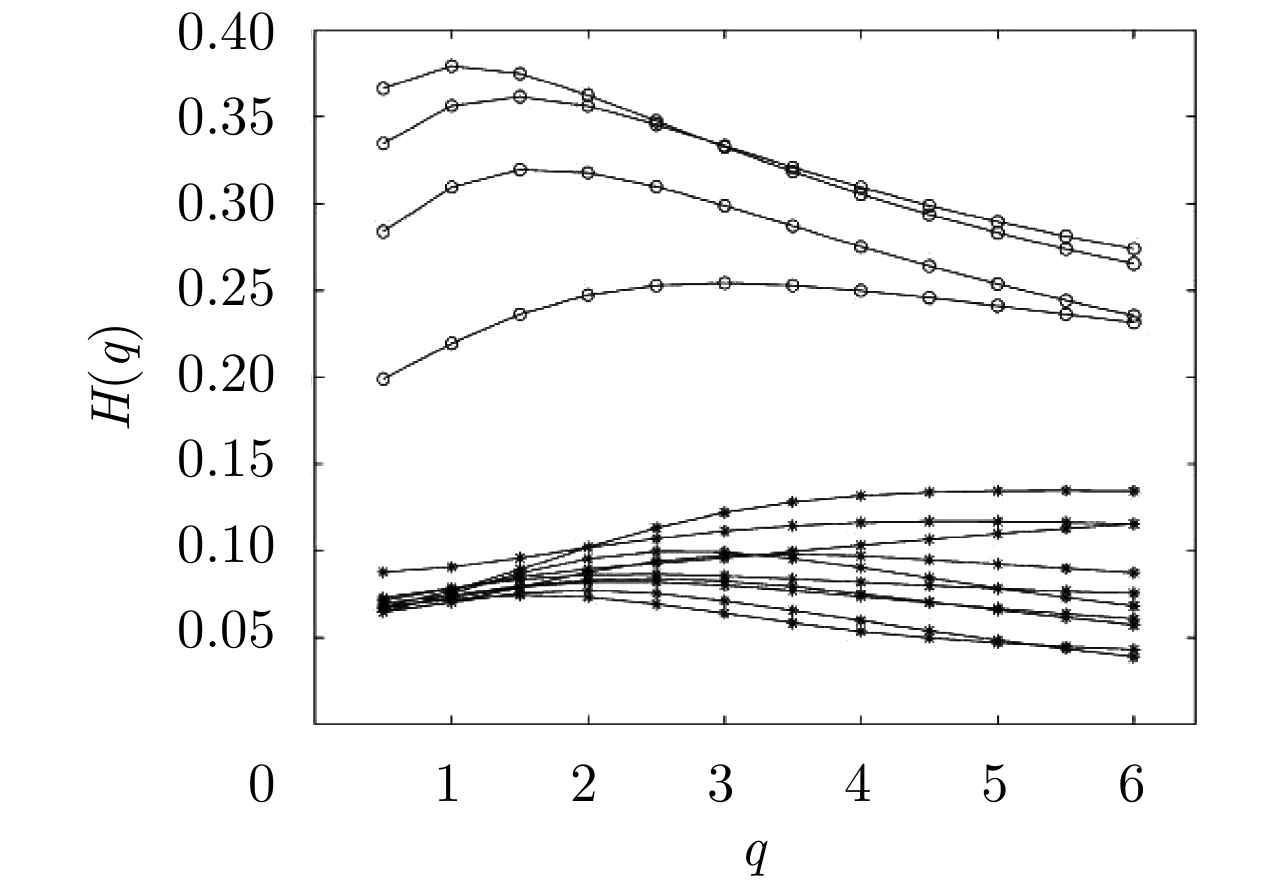
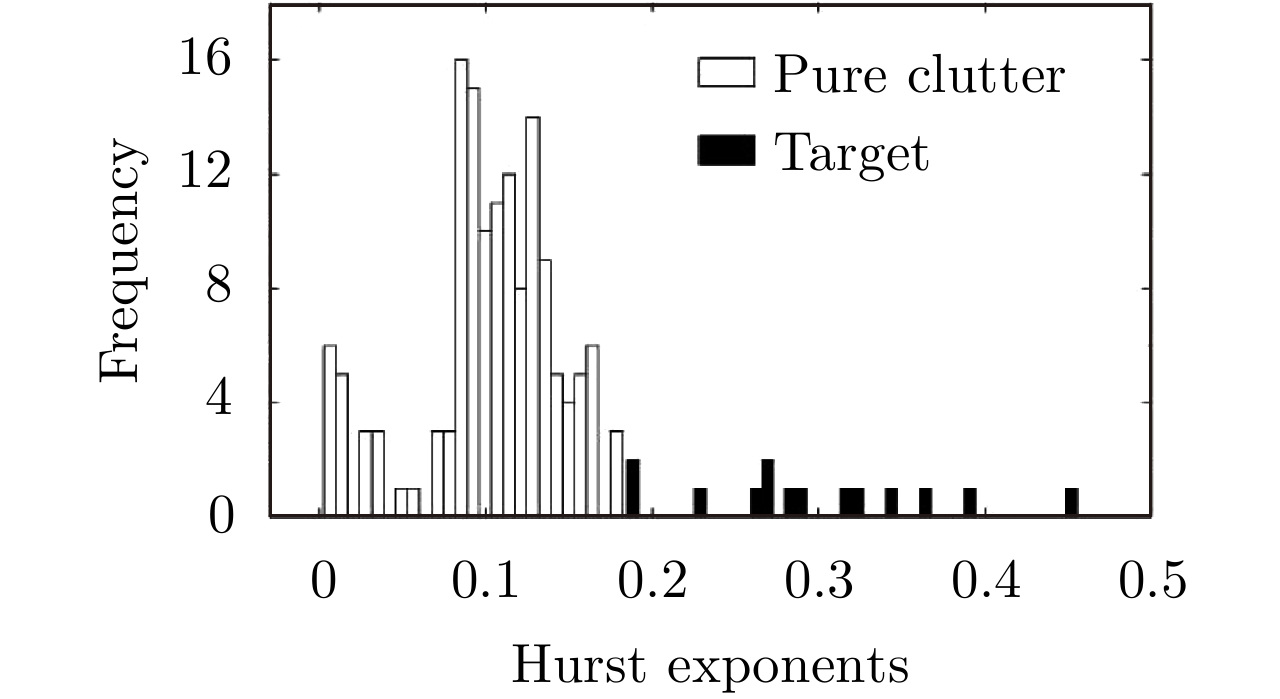
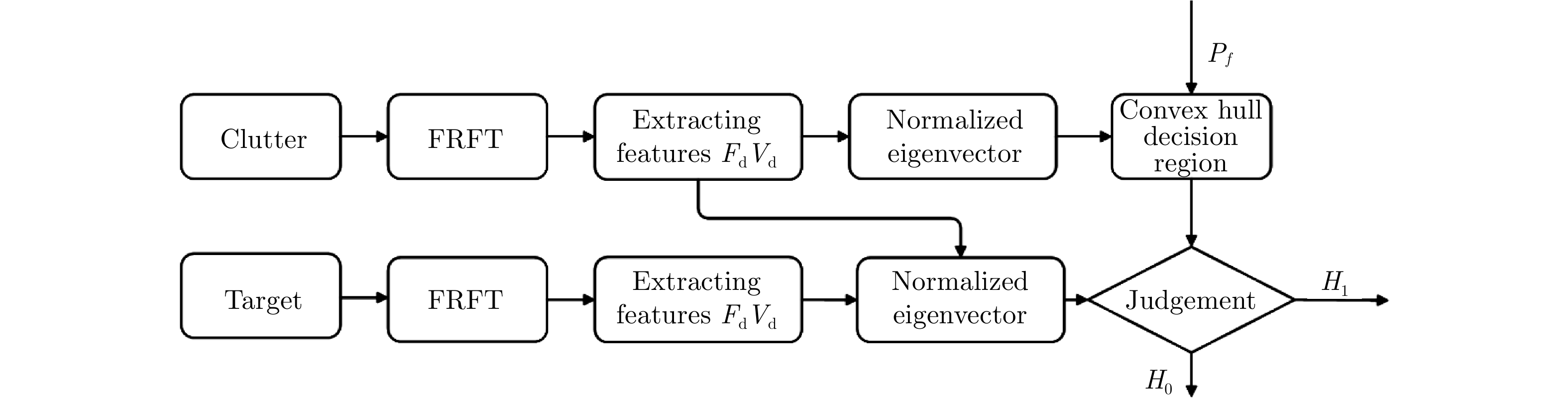
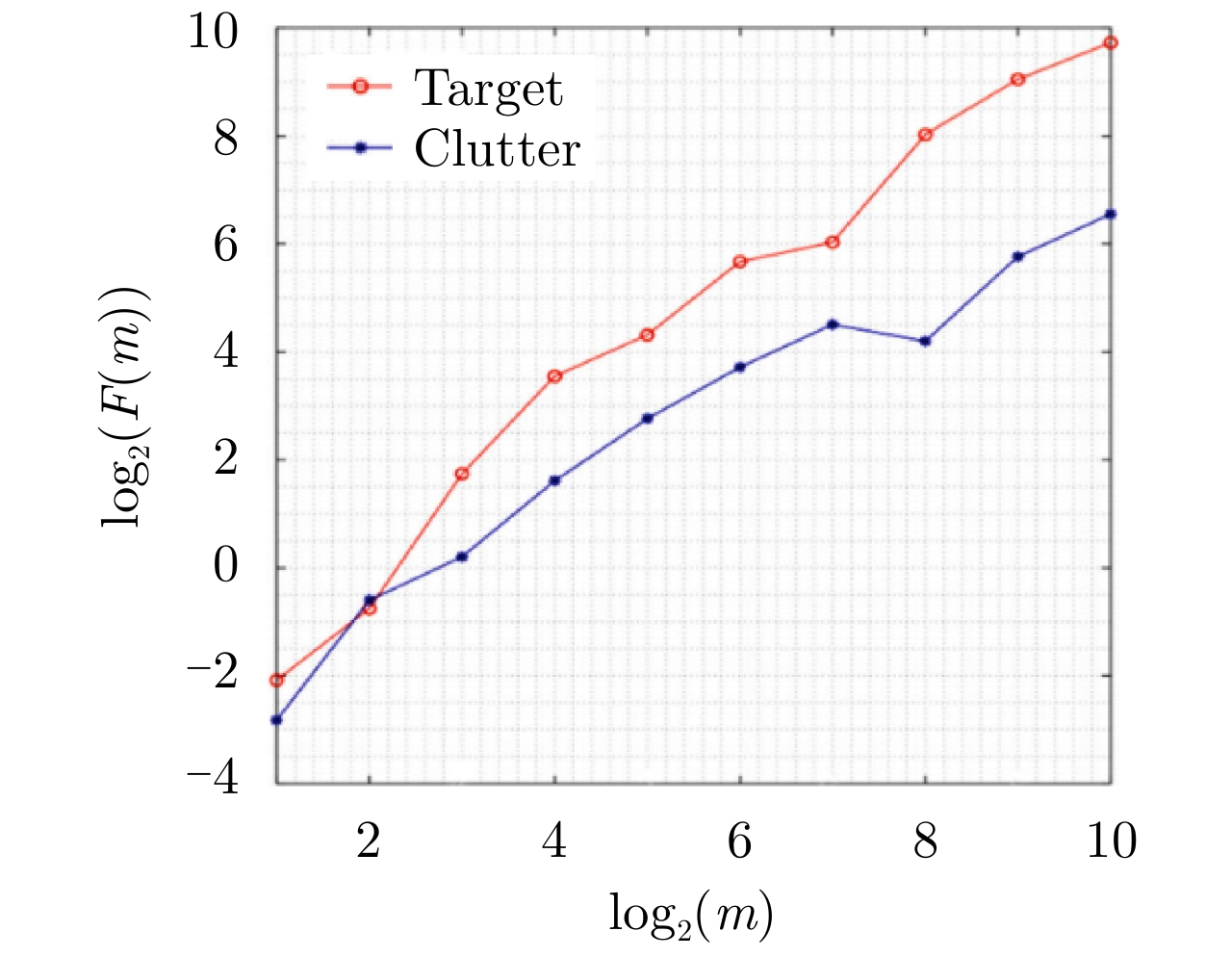
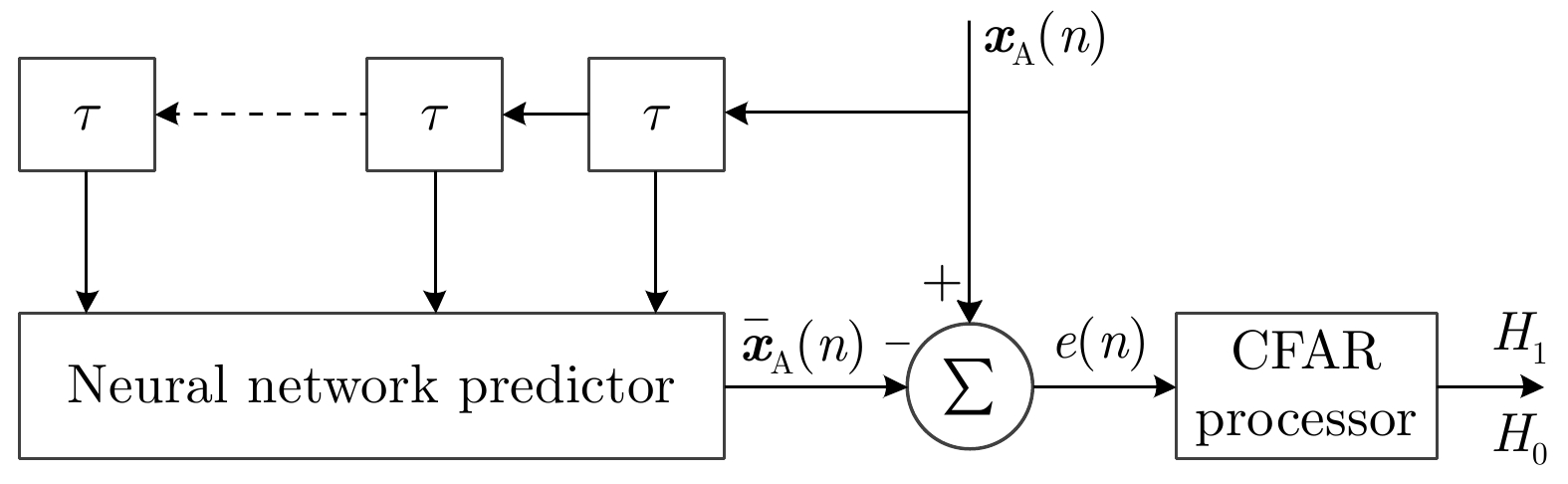
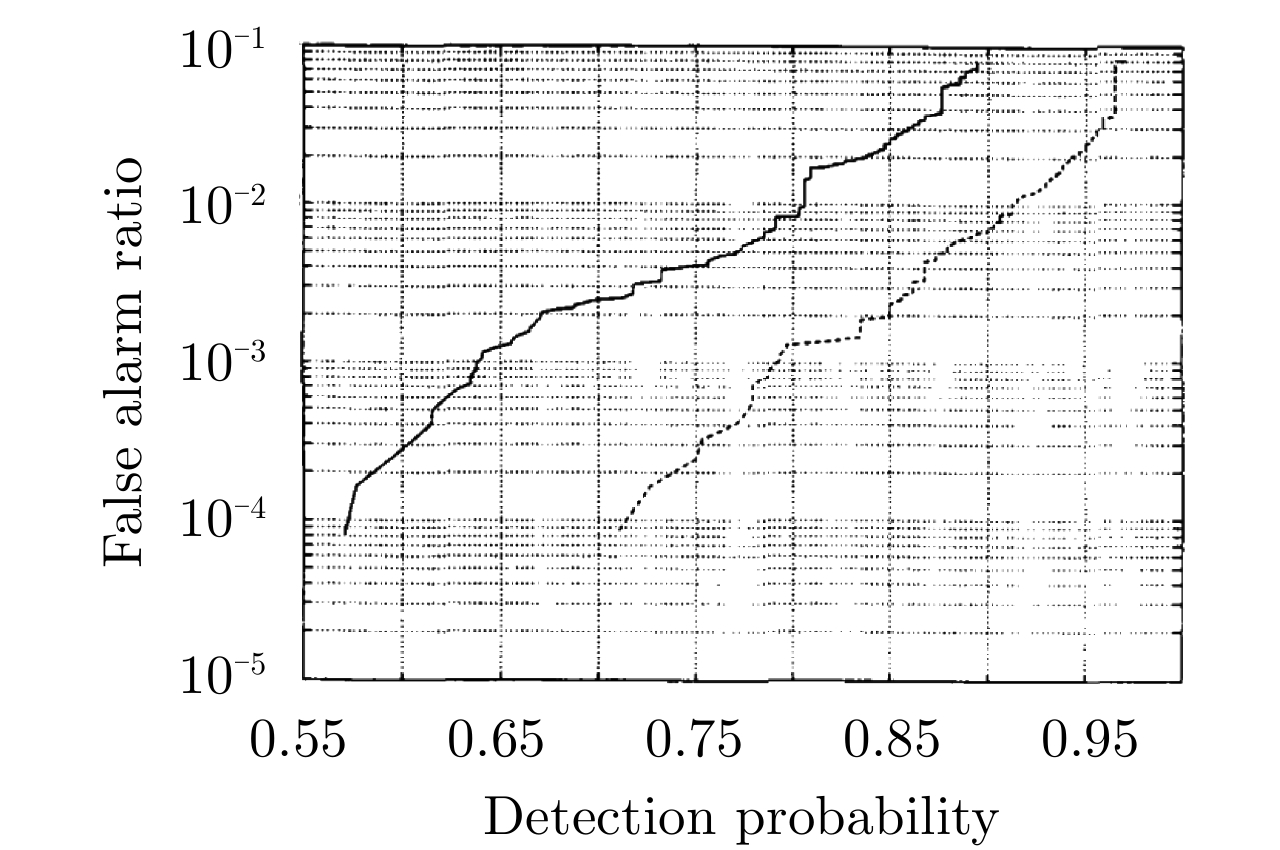
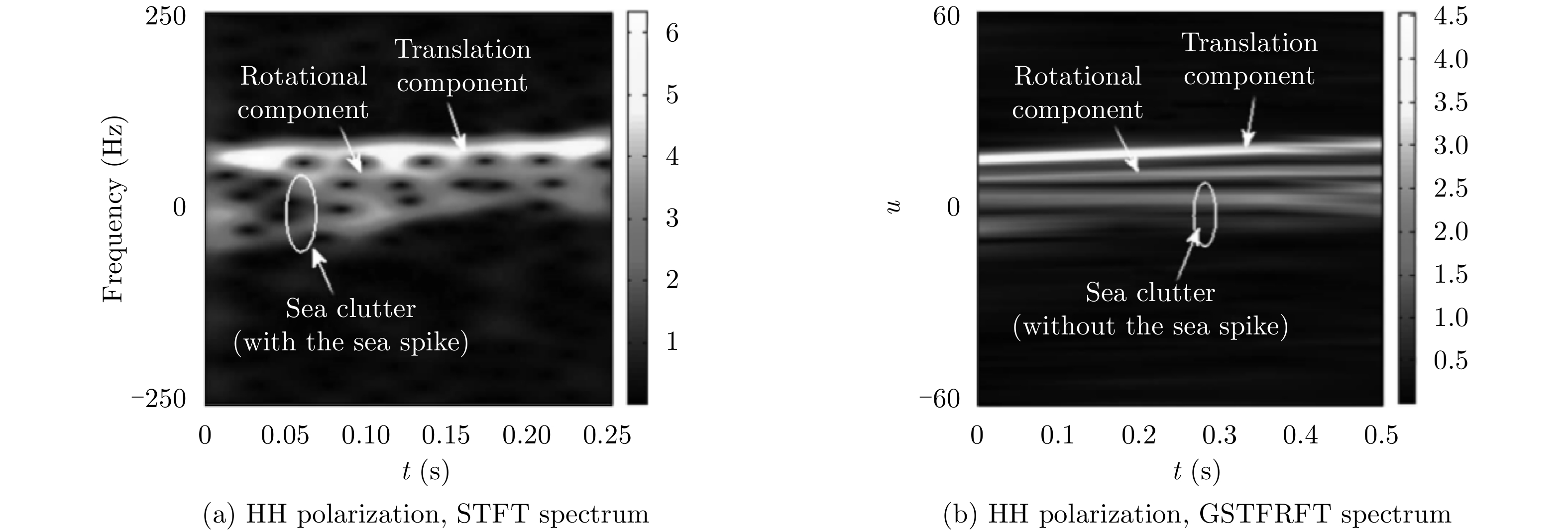
海杂波背景下的雷达目标检测对民用和军事都有着重要的意义。随着海面目标的小型化和隐身化,海面慢速、漂浮小目标已经成为了雷达警戒的重点对象。关于此类小目标的检测一直以来都是海杂波背景下目标检测中的难题。通常,漂浮小目标的雷达散射横截面积(RCS)微弱,并且运动速度慢,常常在时域和频域均存在“超杂波检测”的困难。传统目标检测方法对漂浮小目标的检测存在明显的性能瓶颈。对于海面漂浮小目标的检测,采用高多普勒和高距离分辨体制(“双高”体制)是从雷达体制上解决这个问题的有效途径。在双高体制下,雷达接收的目标回波提供了更多的可用信息。然而,如何将这些更加精细化的信息转化为探测性能的提升,一直以来都是雷达届关注的难点,相关科研成果也一直在不断地推陈出新。近些年,在双高雷达体制下,学者们提出了多种基于特征的目标检测方法,作为对海智能检测的人工特征工程阶段,这些方法缓解了仅依靠能量信息较难检测小目标的困难局面,极大程度地改善了对漂浮小目标的检测性能。为了更好地让相关雷达从业者了解该领域这些年的发展和未来的趋势,该文首先总结了对海检测的难点和常用的目标检测方法,然后分析了特征检测的原理和通用框架以及国内外几种典型的基于特征的检测方法,最后对特征检测方法发展趋势进行了展望。 海杂波背景下的雷达目标检测对民用和军事都有着重要的意义。随着海面目标的小型化和隐身化,海面慢速、漂浮小目标已经成为了雷达警戒的重点对象。关于此类小目标的检测一直以来都是海杂波背景下目标检测中的难题。通常,漂浮小目标的雷达散射横截面积(RCS)微弱,并且运动速度慢,常常在时域和频域均存在“超杂波检测”的困难。传统目标检测方法对漂浮小目标的检测存在明显的性能瓶颈。对于海面漂浮小目标的检测,采用高多普勒和高距离分辨体制(“双高”体制)是从雷达体制上解决这个问题的有效途径。在双高体制下,雷达接收的目标回波提供了更多的可用信息。然而,如何将这些更加精细化的信息转化为探测性能的提升,一直以来都是雷达届关注的难点,相关科研成果也一直在不断地推陈出新。近些年,在双高雷达体制下,学者们提出了多种基于特征的目标检测方法,作为对海智能检测的人工特征工程阶段,这些方法缓解了仅依靠能量信息较难检测小目标的困难局面,极大程度地改善了对漂浮小目标的检测性能。为了更好地让相关雷达从业者了解该领域这些年的发展和未来的趋势,该文首先总结了对海检测的难点和常用的目标检测方法,然后分析了特征检测的原理和通用框架以及国内外几种典型的基于特征的检测方法,最后对特征检测方法发展趋势进行了展望。
海杂波背景下的雷达目标检测对民用和军事都有着重要的意义。随着海面目标的小型化和隐身化,海面慢速、漂浮小目标已经成为了雷达警戒的重点对象。关于此类小目标的检测一直以来都是海杂波背景下目标检测中的难题。通常,漂浮小目标的雷达散射横截面积(RCS)微弱,并且运动速度慢,常常在时域和频域均存在“超杂波检测”的困难。传统目标检测方法对漂浮小目标的检测存在明显的性能瓶颈。对于海面漂浮小目标的检测,采用高多普勒和高距离分辨体制(“双高”体制)是从雷达体制上解决这个问题的有效途径。在双高体制下,雷达接收的目标回波提供了更多的可用信息。然而,如何将这些更加精细化的信息转化为探测性能的提升,一直以来都是雷达届关注的难点,相关科研成果也一直在不断地推陈出新。近些年,在双高雷达体制下,学者们提出了多种基于特征的目标检测方法,作为对海智能检测的人工特征工程阶段,这些方法缓解了仅依靠能量信息较难检测小目标的困难局面,极大程度地改善了对漂浮小目标的检测性能。为了更好地让相关雷达从业者了解该领域这些年的发展和未来的趋势,该文首先总结了对海检测的难点和常用的目标检测方法,然后分析了特征检测的原理和通用框架以及国内外几种典型的基于特征的检测方法,最后对特征检测方法发展趋势进行了展望。 海杂波背景下的雷达目标检测对民用和军事都有着重要的意义。随着海面目标的小型化和隐身化,海面慢速、漂浮小目标已经成为了雷达警戒的重点对象。关于此类小目标的检测一直以来都是海杂波背景下目标检测中的难题。通常,漂浮小目标的雷达散射横截面积(RCS)微弱,并且运动速度慢,常常在时域和频域均存在“超杂波检测”的困难。传统目标检测方法对漂浮小目标的检测存在明显的性能瓶颈。对于海面漂浮小目标的检测,采用高多普勒和高距离分辨体制(“双高”体制)是从雷达体制上解决这个问题的有效途径。在双高体制下,雷达接收的目标回波提供了更多的可用信息。然而,如何将这些更加精细化的信息转化为探测性能的提升,一直以来都是雷达届关注的难点,相关科研成果也一直在不断地推陈出新。近些年,在双高雷达体制下,学者们提出了多种基于特征的目标检测方法,作为对海智能检测的人工特征工程阶段,这些方法缓解了仅依靠能量信息较难检测小目标的困难局面,极大程度地改善了对漂浮小目标的检测性能。为了更好地让相关雷达从业者了解该领域这些年的发展和未来的趋势,该文首先总结了对海检测的难点和常用的目标检测方法,然后分析了特征检测的原理和通用框架以及国内外几种典型的基于特征的检测方法,最后对特征检测方法发展趋势进行了展望。























2020, 9(4): 715-722.
摘要:
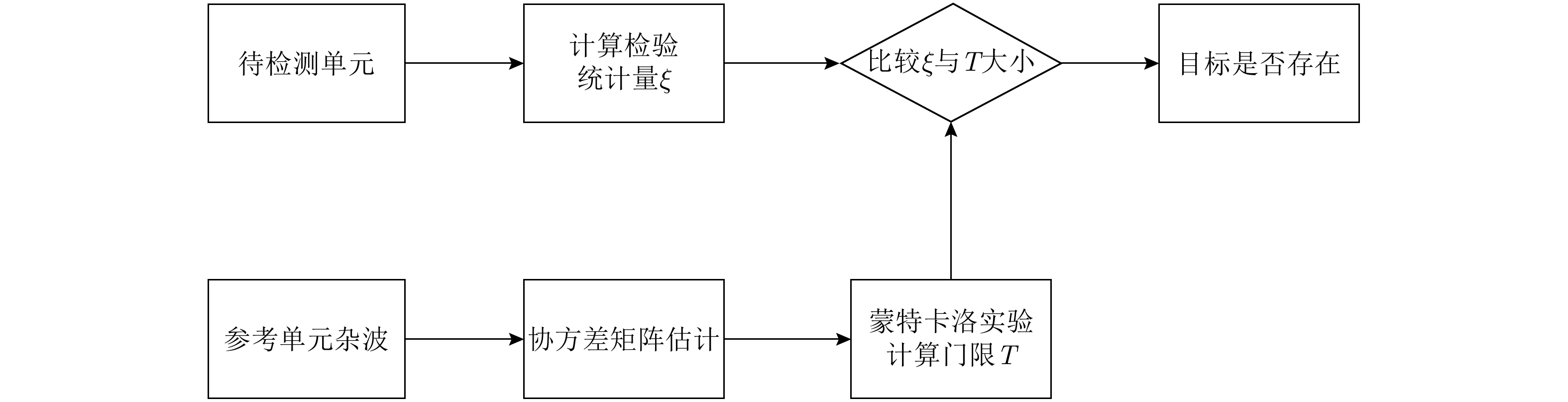
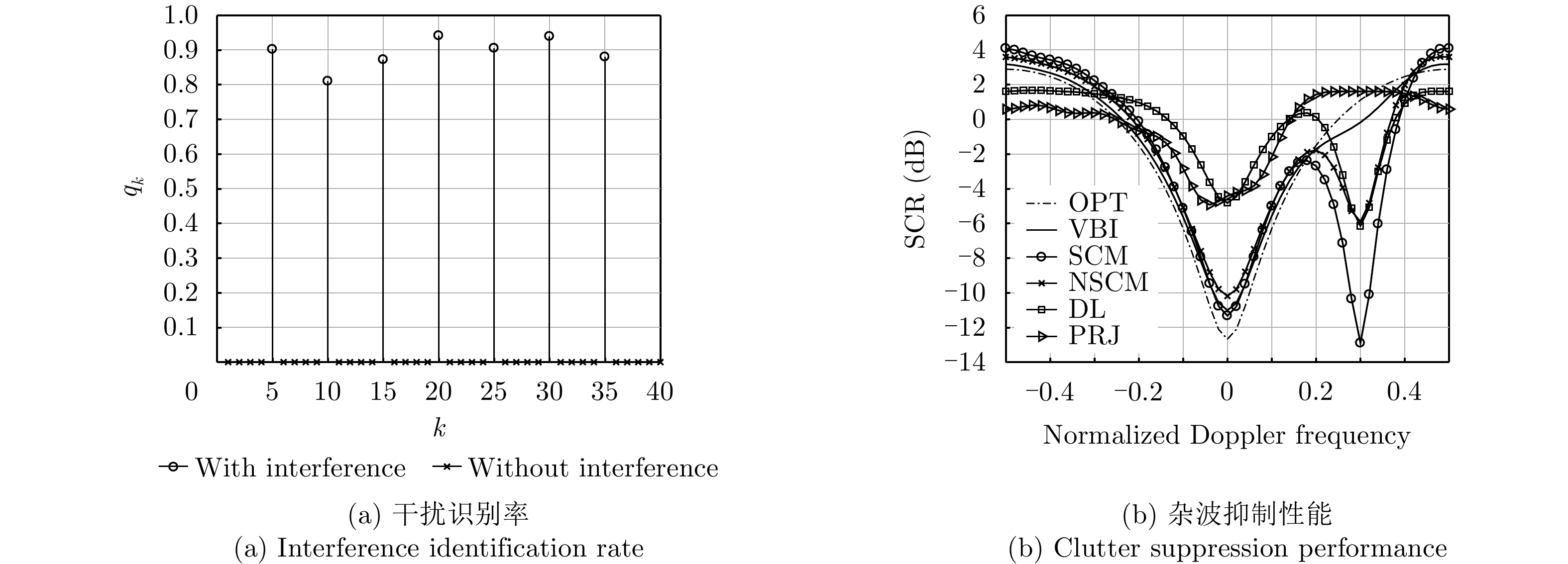
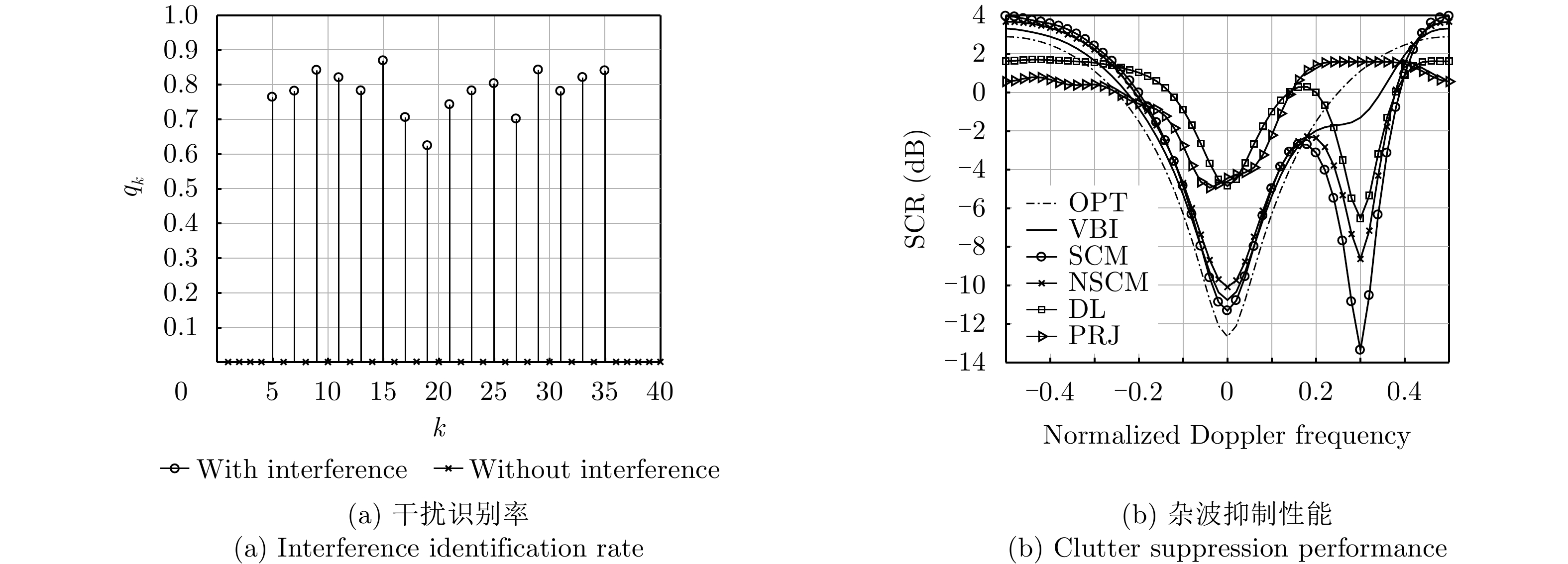
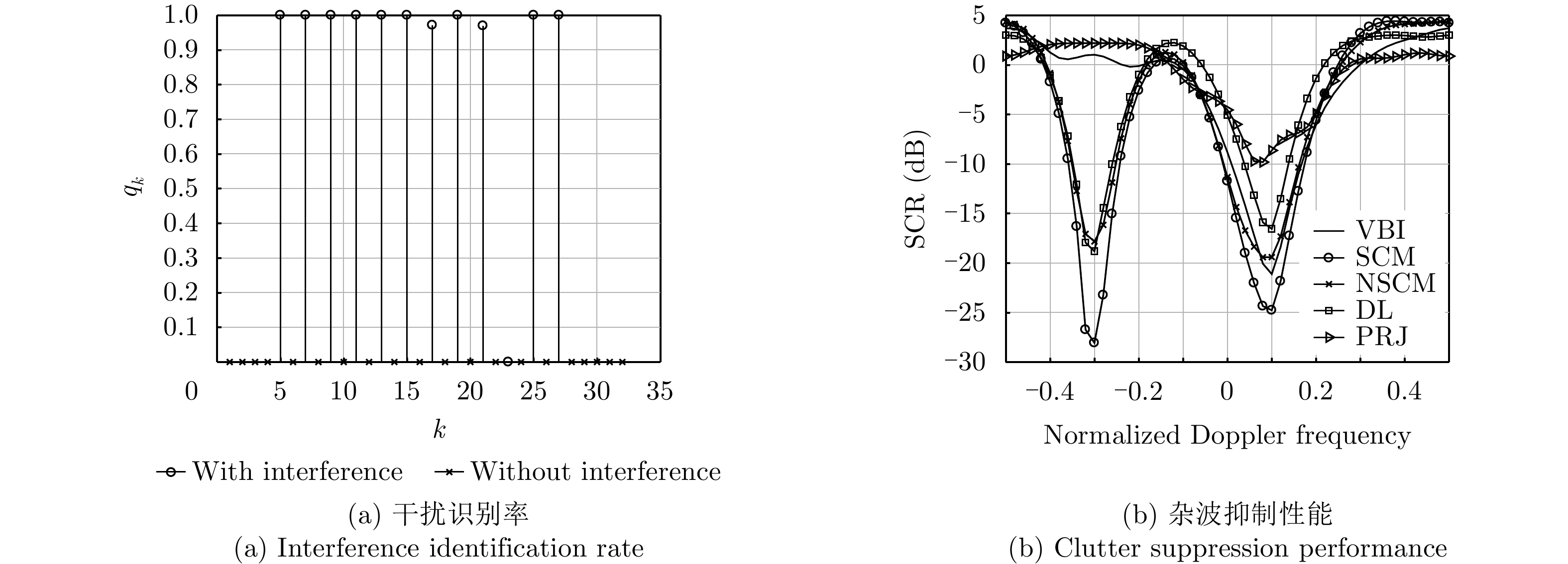
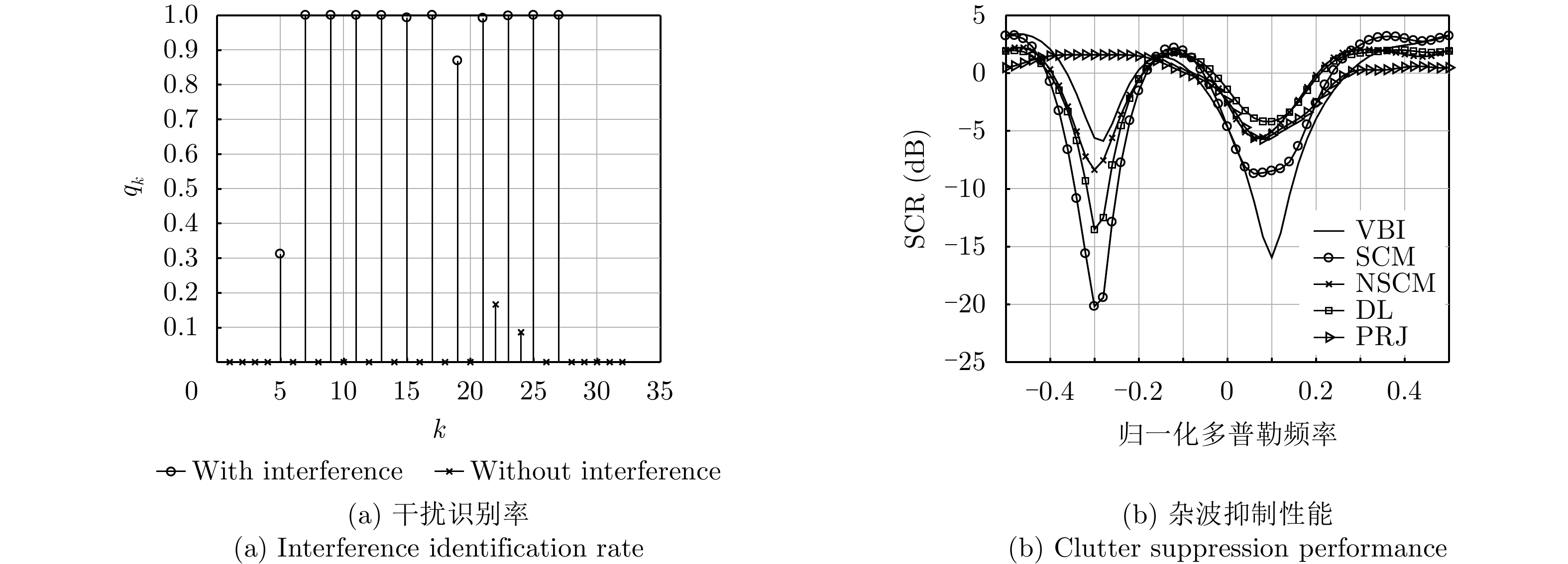
在复杂电磁环境下,往往需要在线估计杂波协方差矩阵,从而自适应调整滤波器权值,实现对杂波的有效抑制,这样有利于目标的估计、检测、定位或跟踪。该文考虑非高斯杂波模型,且部分杂波受到子空间信号干扰,并且有用信号也位于该子空间内。常规方法会导致自适应滤波器在目标多普勒频率处有较大的衰减,极大影响了有用信号的探测。为此提出了一种知识辅助的分层贝叶斯模型,采用变分贝叶斯推断方法获得杂波协方差矩阵的近似后验分布,利用后验均值设计杂波抑制滤波器,可以有效提高目标的探测性能。计算机仿真和实测数据验证结果表明,该方法能够有效抑制杂波,而在目标处有较好的探测能力。 在复杂电磁环境下,往往需要在线估计杂波协方差矩阵,从而自适应调整滤波器权值,实现对杂波的有效抑制,这样有利于目标的估计、检测、定位或跟踪。该文考虑非高斯杂波模型,且部分杂波受到子空间信号干扰,并且有用信号也位于该子空间内。常规方法会导致自适应滤波器在目标多普勒频率处有较大的衰减,极大影响了有用信号的探测。为此提出了一种知识辅助的分层贝叶斯模型,采用变分贝叶斯推断方法获得杂波协方差矩阵的近似后验分布,利用后验均值设计杂波抑制滤波器,可以有效提高目标的探测性能。计算机仿真和实测数据验证结果表明,该方法能够有效抑制杂波,而在目标处有较好的探测能力。
在复杂电磁环境下,往往需要在线估计杂波协方差矩阵,从而自适应调整滤波器权值,实现对杂波的有效抑制,这样有利于目标的估计、检测、定位或跟踪。该文考虑非高斯杂波模型,且部分杂波受到子空间信号干扰,并且有用信号也位于该子空间内。常规方法会导致自适应滤波器在目标多普勒频率处有较大的衰减,极大影响了有用信号的探测。为此提出了一种知识辅助的分层贝叶斯模型,采用变分贝叶斯推断方法获得杂波协方差矩阵的近似后验分布,利用后验均值设计杂波抑制滤波器,可以有效提高目标的探测性能。计算机仿真和实测数据验证结果表明,该方法能够有效抑制杂波,而在目标处有较好的探测能力。 在复杂电磁环境下,往往需要在线估计杂波协方差矩阵,从而自适应调整滤波器权值,实现对杂波的有效抑制,这样有利于目标的估计、检测、定位或跟踪。该文考虑非高斯杂波模型,且部分杂波受到子空间信号干扰,并且有用信号也位于该子空间内。常规方法会导致自适应滤波器在目标多普勒频率处有较大的衰减,极大影响了有用信号的探测。为此提出了一种知识辅助的分层贝叶斯模型,采用变分贝叶斯推断方法获得杂波协方差矩阵的近似后验分布,利用后验均值设计杂波抑制滤波器,可以有效提高目标的探测性能。计算机仿真和实测数据验证结果表明,该方法能够有效抑制杂波,而在目标处有较好的探测能力。

2020, 9(4): 723-729.
摘要:
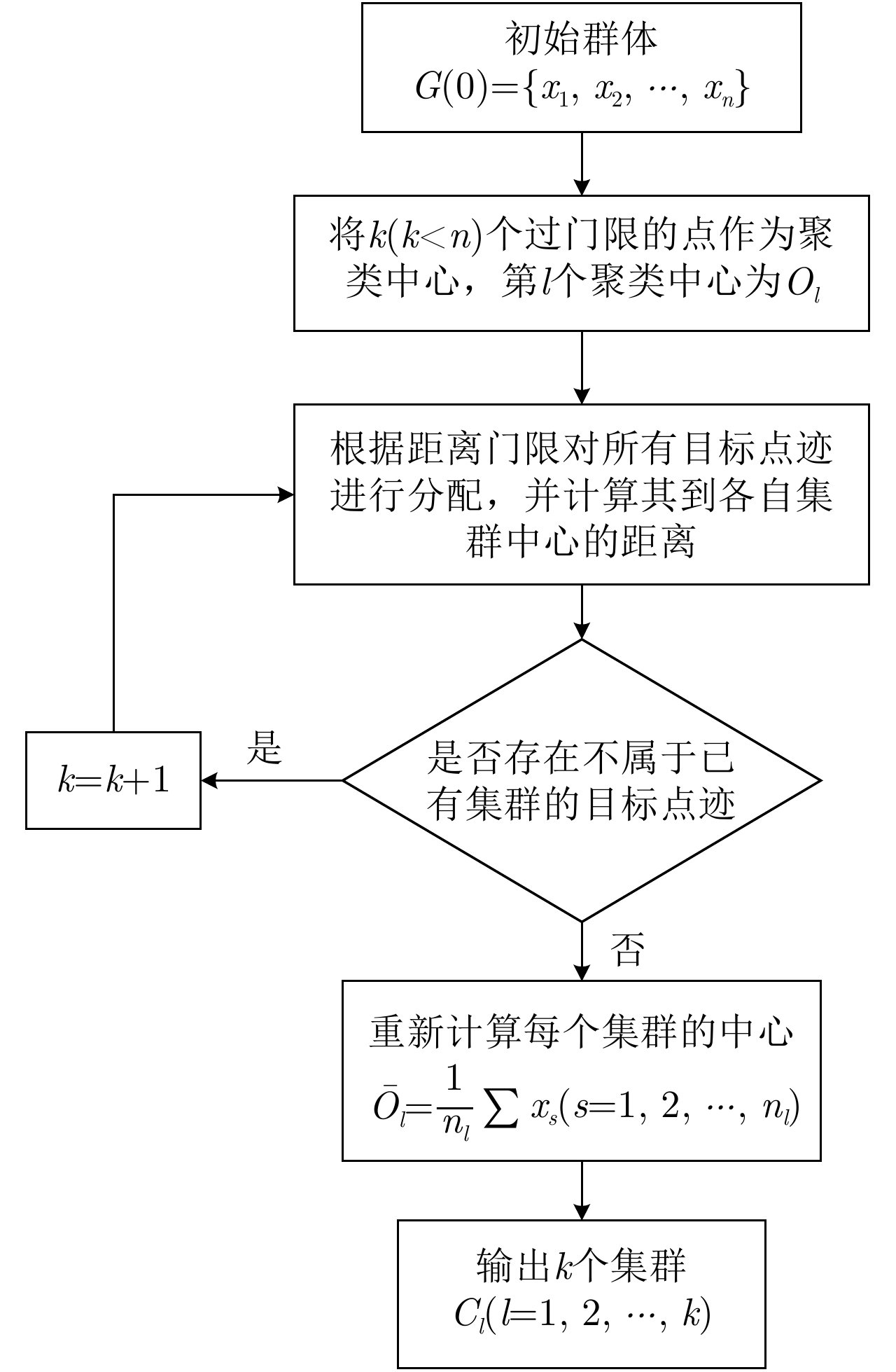
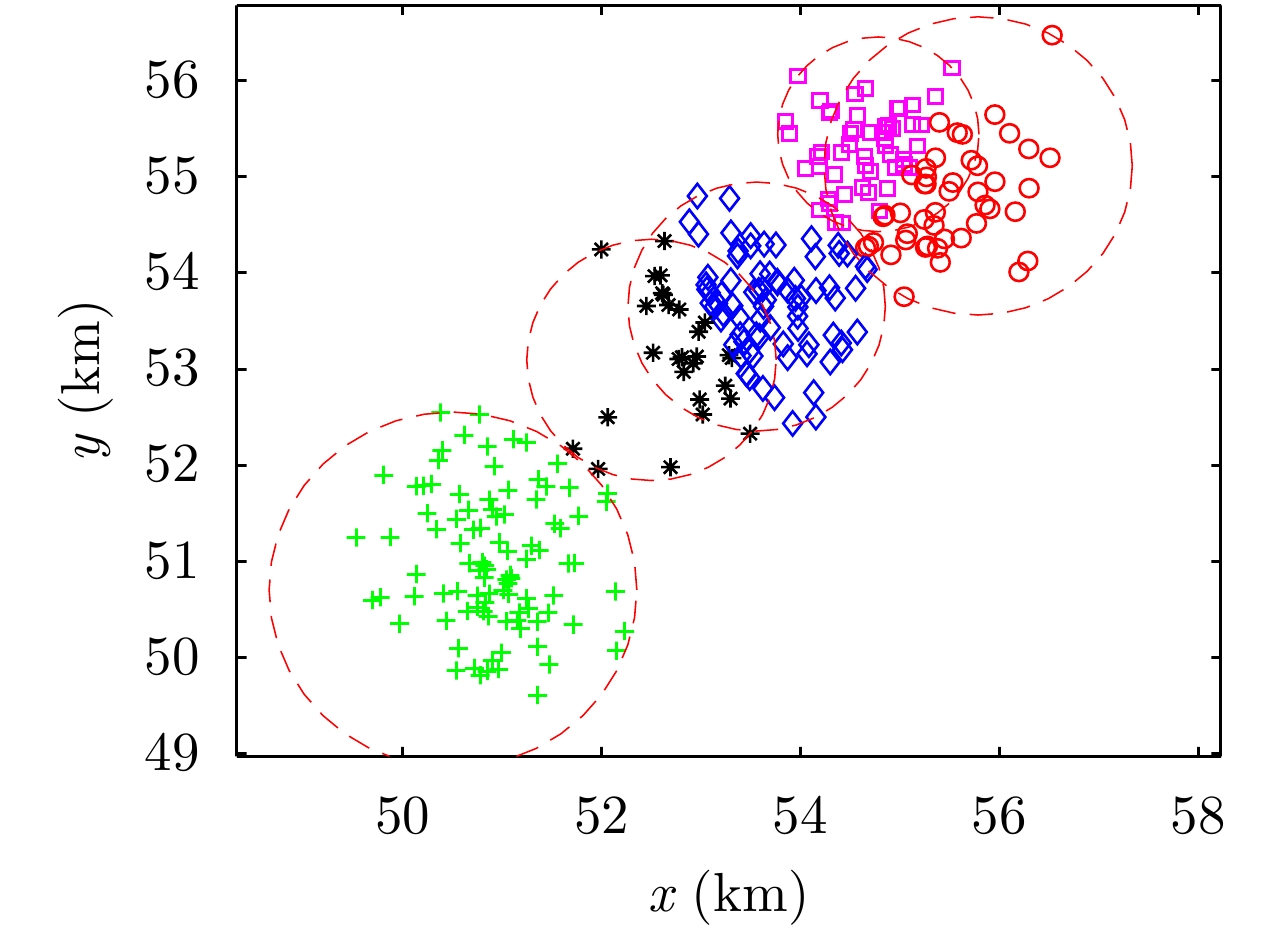
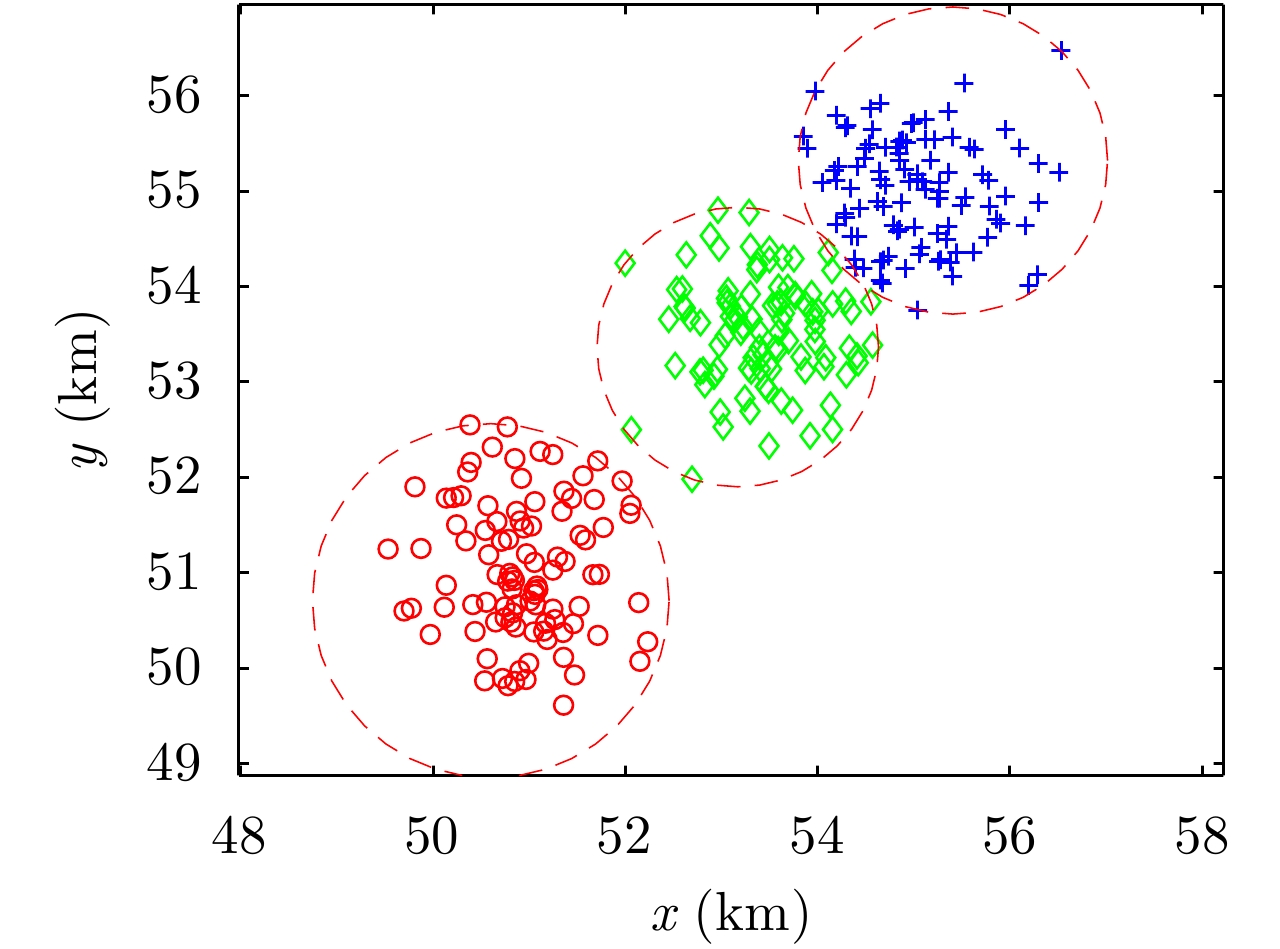
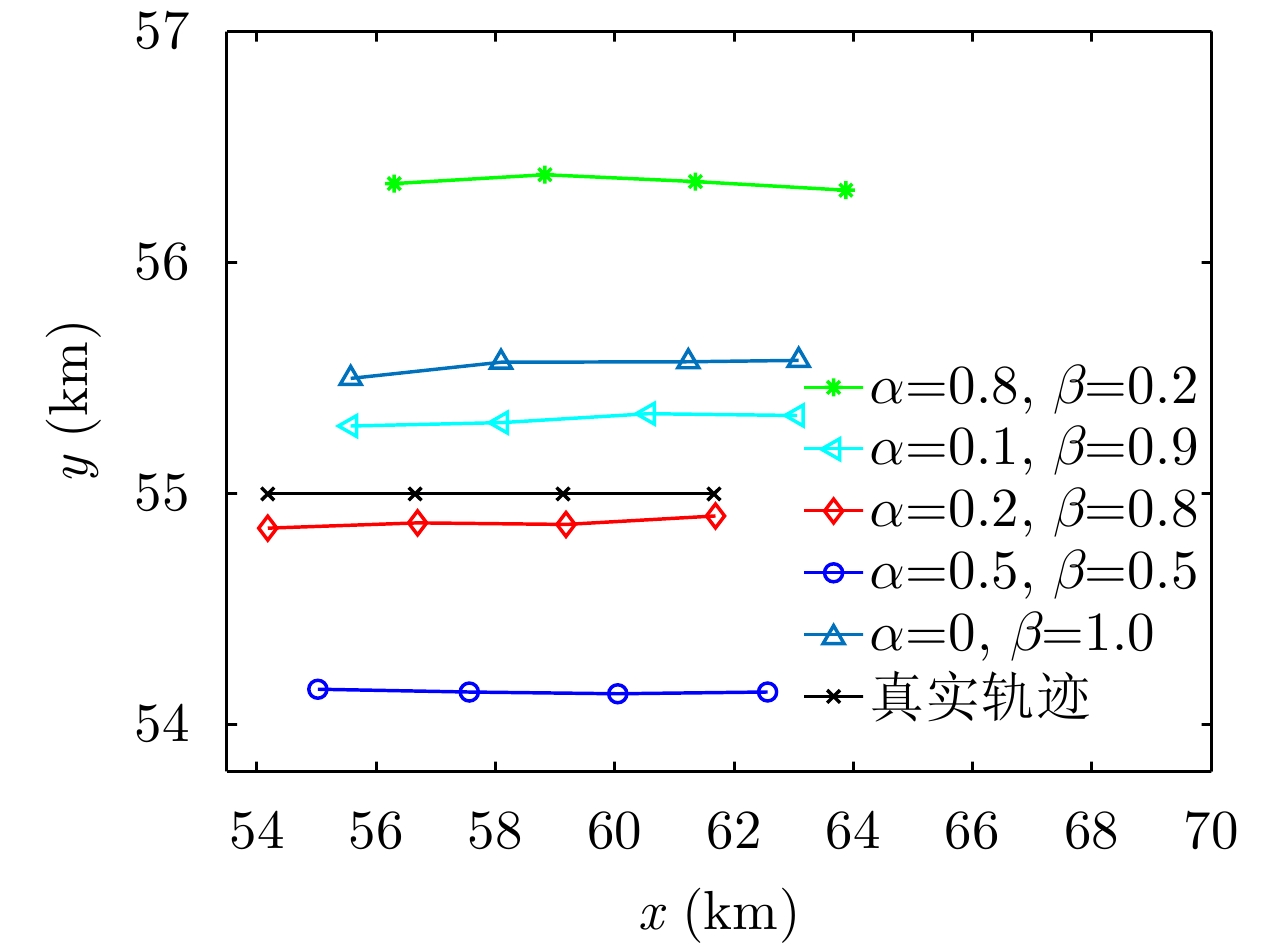
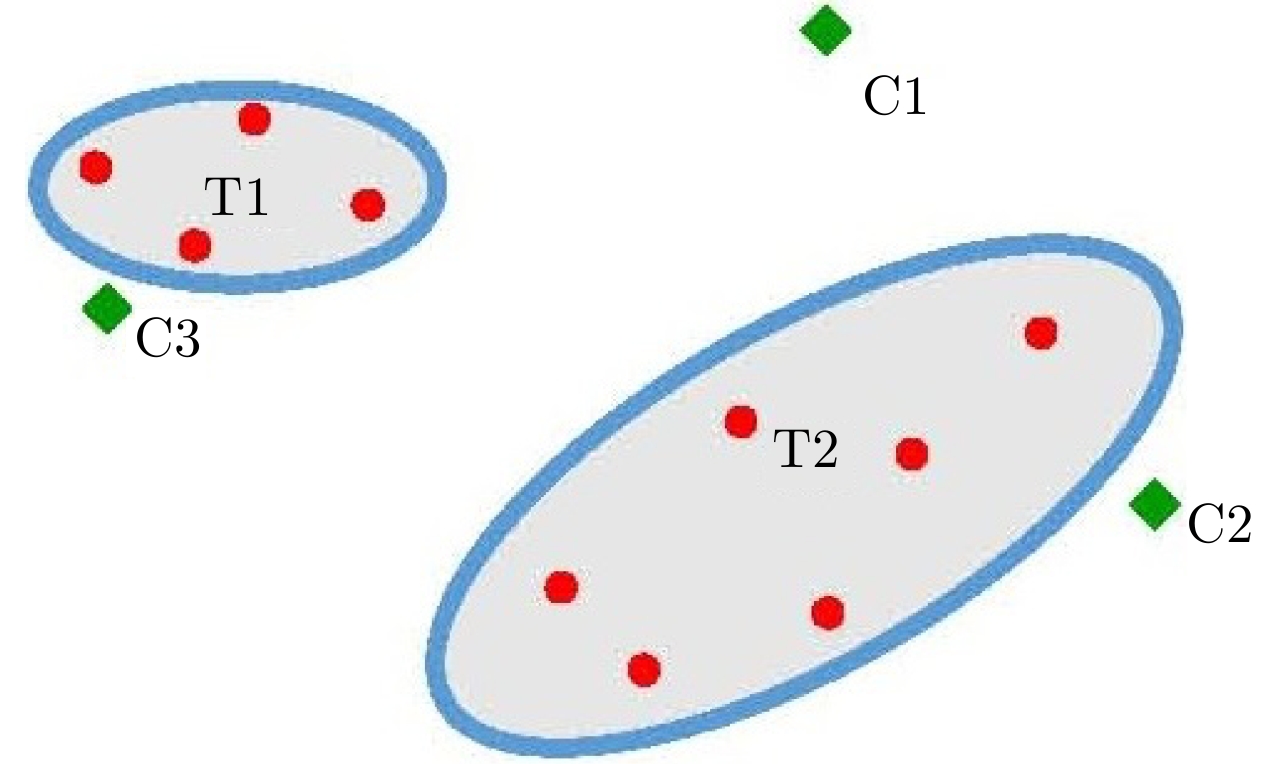
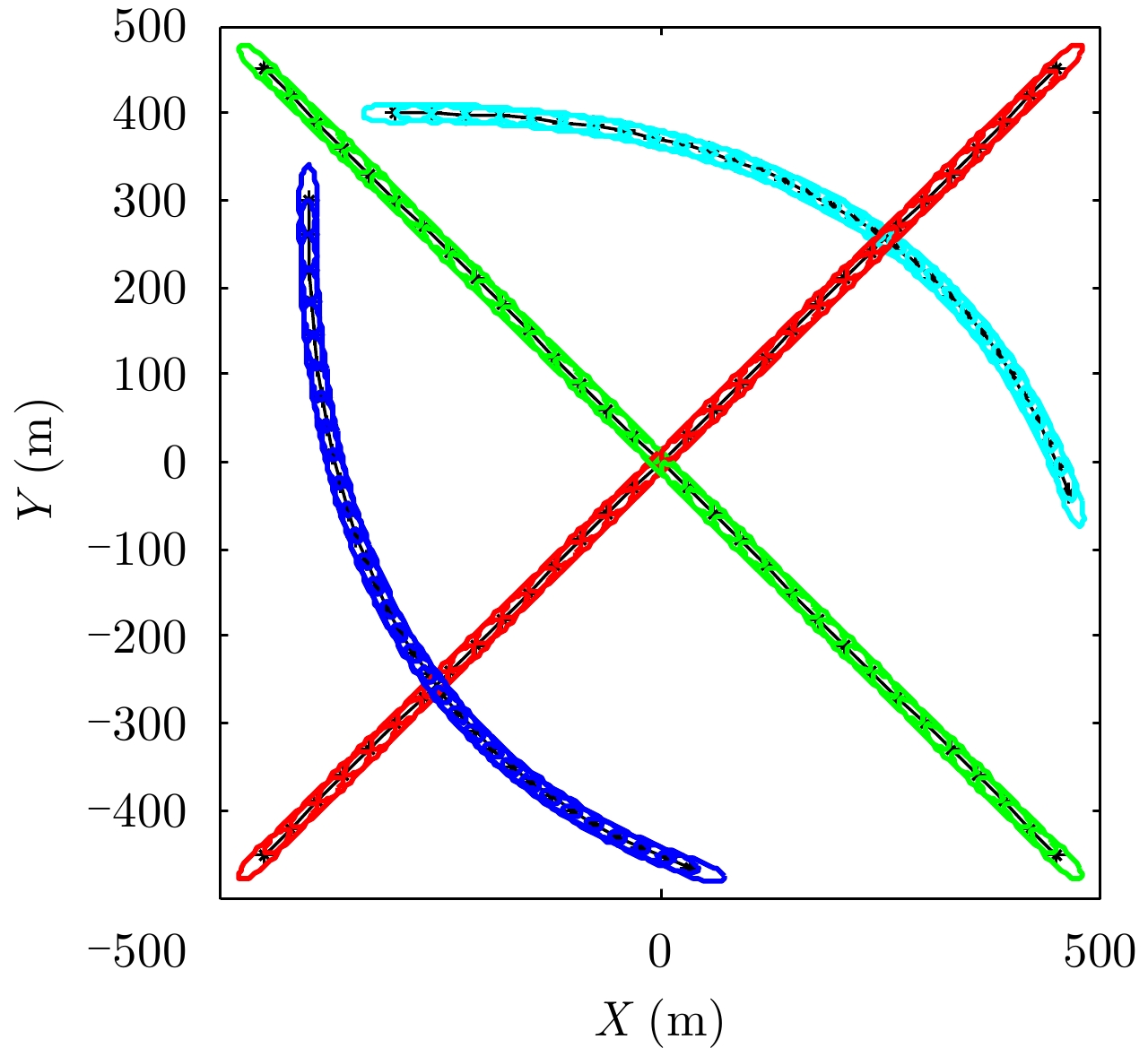
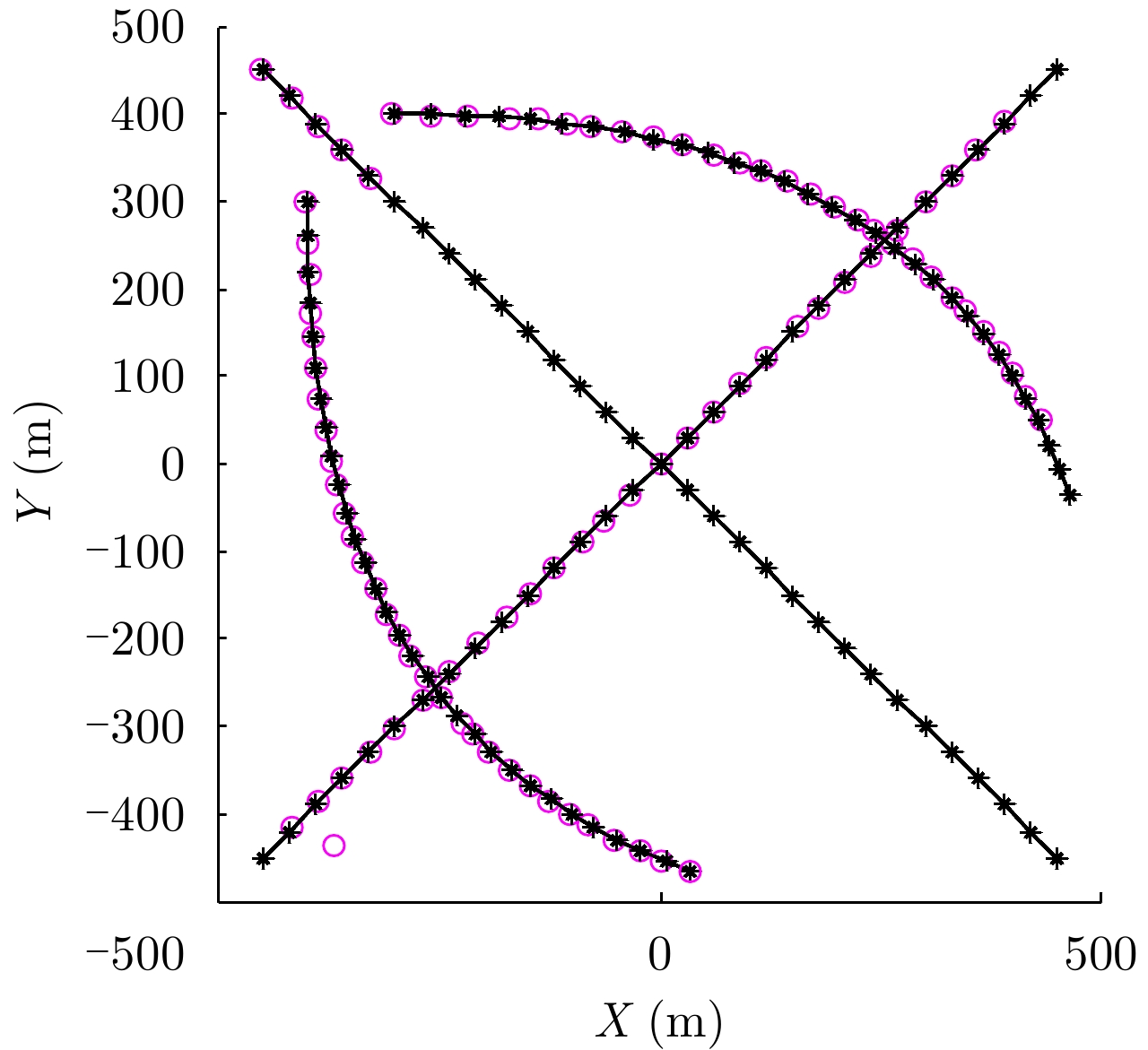
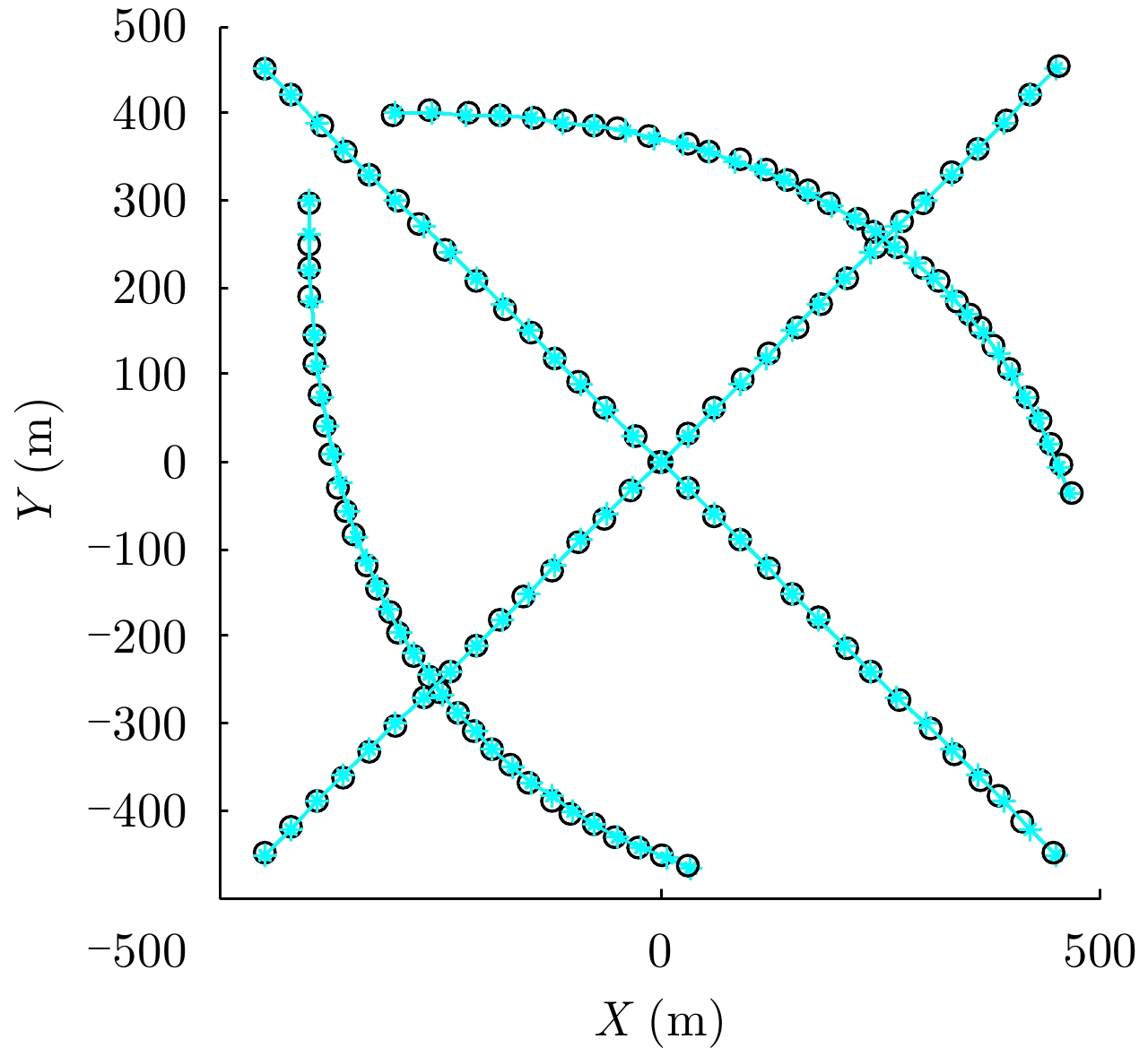
航迹起始是群目标跟踪的首要环节,其性能好坏直接影响着目标跟踪航迹的质量。传统的群目标航迹起始方法仅利用目标的位置信息完成分群检测和等效量测求解等步骤,没有充分利用回波幅度信息,存在分群检测不理想、等效量测求解不准确等问题,有可能引起失跟现象。针对此问题,该文提出一种回波幅度信息辅助的群目标航迹起始方法。首先利用目标位置信息和幅度信息完成分群检测,然后综合采用幅度加权和位置加权求解等效量测,最后基于修正的逻辑法进行群目标航迹起始。该文方法在分群检测和求解等效量测等步骤充分利用了回波幅度信息,不仅可以在集群数量未知的情况下正确划分群,而且降低了失跟率,提高了群目标的跟踪性能。仿真结果验证了所提方法的有效性。 航迹起始是群目标跟踪的首要环节,其性能好坏直接影响着目标跟踪航迹的质量。传统的群目标航迹起始方法仅利用目标的位置信息完成分群检测和等效量测求解等步骤,没有充分利用回波幅度信息,存在分群检测不理想、等效量测求解不准确等问题,有可能引起失跟现象。针对此问题,该文提出一种回波幅度信息辅助的群目标航迹起始方法。首先利用目标位置信息和幅度信息完成分群检测,然后综合采用幅度加权和位置加权求解等效量测,最后基于修正的逻辑法进行群目标航迹起始。该文方法在分群检测和求解等效量测等步骤充分利用了回波幅度信息,不仅可以在集群数量未知的情况下正确划分群,而且降低了失跟率,提高了群目标的跟踪性能。仿真结果验证了所提方法的有效性。
航迹起始是群目标跟踪的首要环节,其性能好坏直接影响着目标跟踪航迹的质量。传统的群目标航迹起始方法仅利用目标的位置信息完成分群检测和等效量测求解等步骤,没有充分利用回波幅度信息,存在分群检测不理想、等效量测求解不准确等问题,有可能引起失跟现象。针对此问题,该文提出一种回波幅度信息辅助的群目标航迹起始方法。首先利用目标位置信息和幅度信息完成分群检测,然后综合采用幅度加权和位置加权求解等效量测,最后基于修正的逻辑法进行群目标航迹起始。该文方法在分群检测和求解等效量测等步骤充分利用了回波幅度信息,不仅可以在集群数量未知的情况下正确划分群,而且降低了失跟率,提高了群目标的跟踪性能。仿真结果验证了所提方法的有效性。 航迹起始是群目标跟踪的首要环节,其性能好坏直接影响着目标跟踪航迹的质量。传统的群目标航迹起始方法仅利用目标的位置信息完成分群检测和等效量测求解等步骤,没有充分利用回波幅度信息,存在分群检测不理想、等效量测求解不准确等问题,有可能引起失跟现象。针对此问题,该文提出一种回波幅度信息辅助的群目标航迹起始方法。首先利用目标位置信息和幅度信息完成分群检测,然后综合采用幅度加权和位置加权求解等效量测,最后基于修正的逻辑法进行群目标航迹起始。该文方法在分群检测和求解等效量测等步骤充分利用了回波幅度信息,不仅可以在集群数量未知的情况下正确划分群,而且降低了失跟率,提高了群目标的跟踪性能。仿真结果验证了所提方法的有效性。




2020, 9(4): 730-738.
摘要:
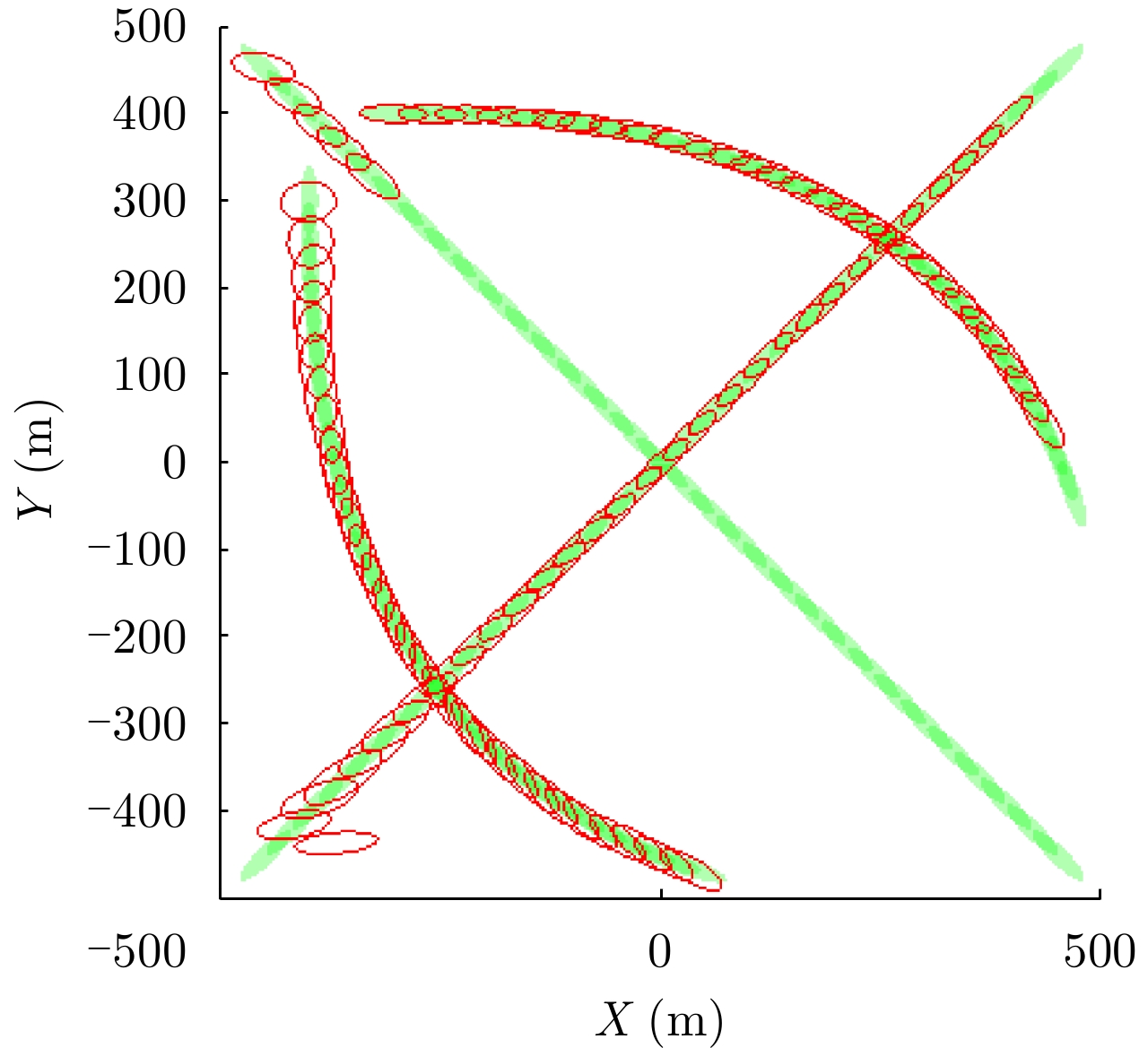
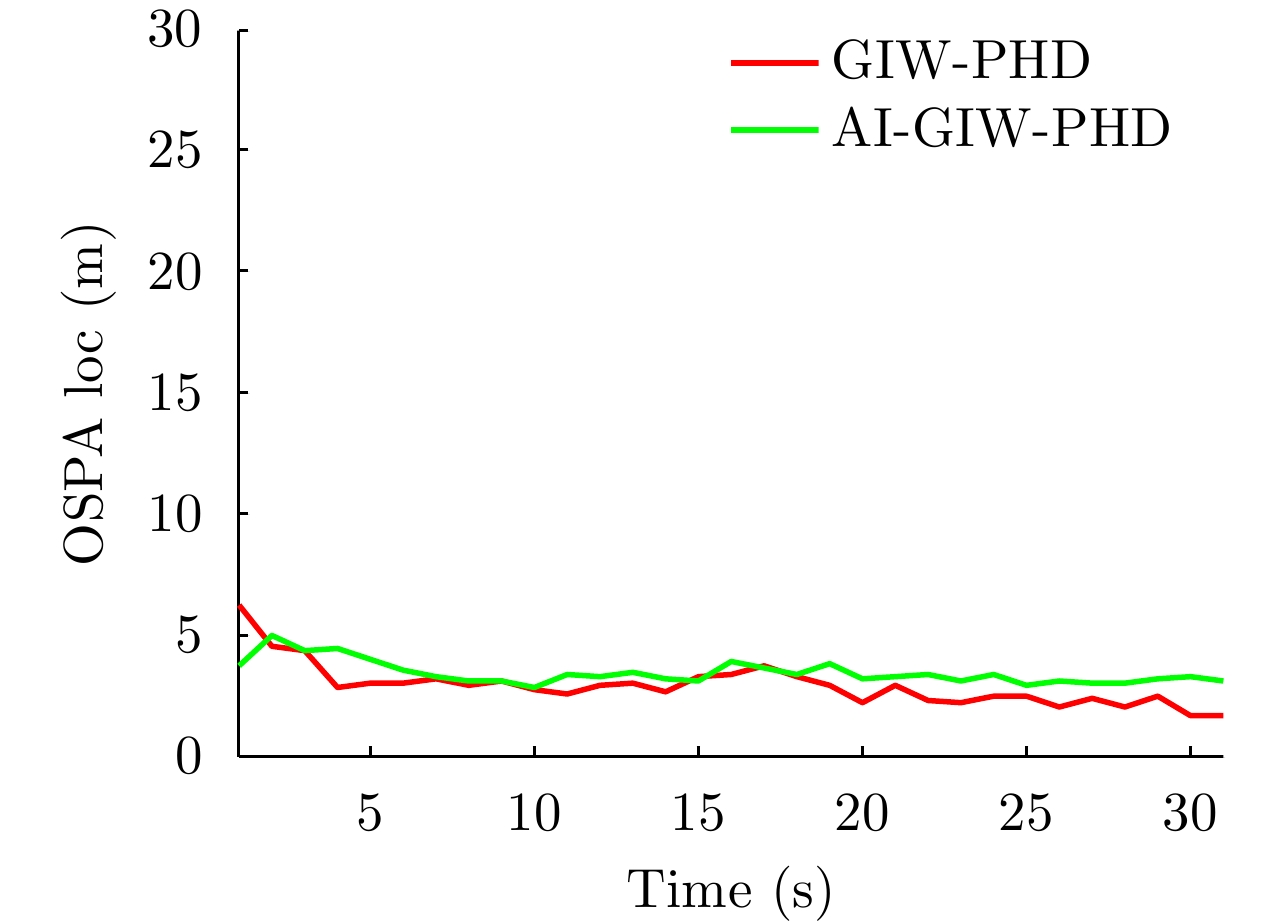
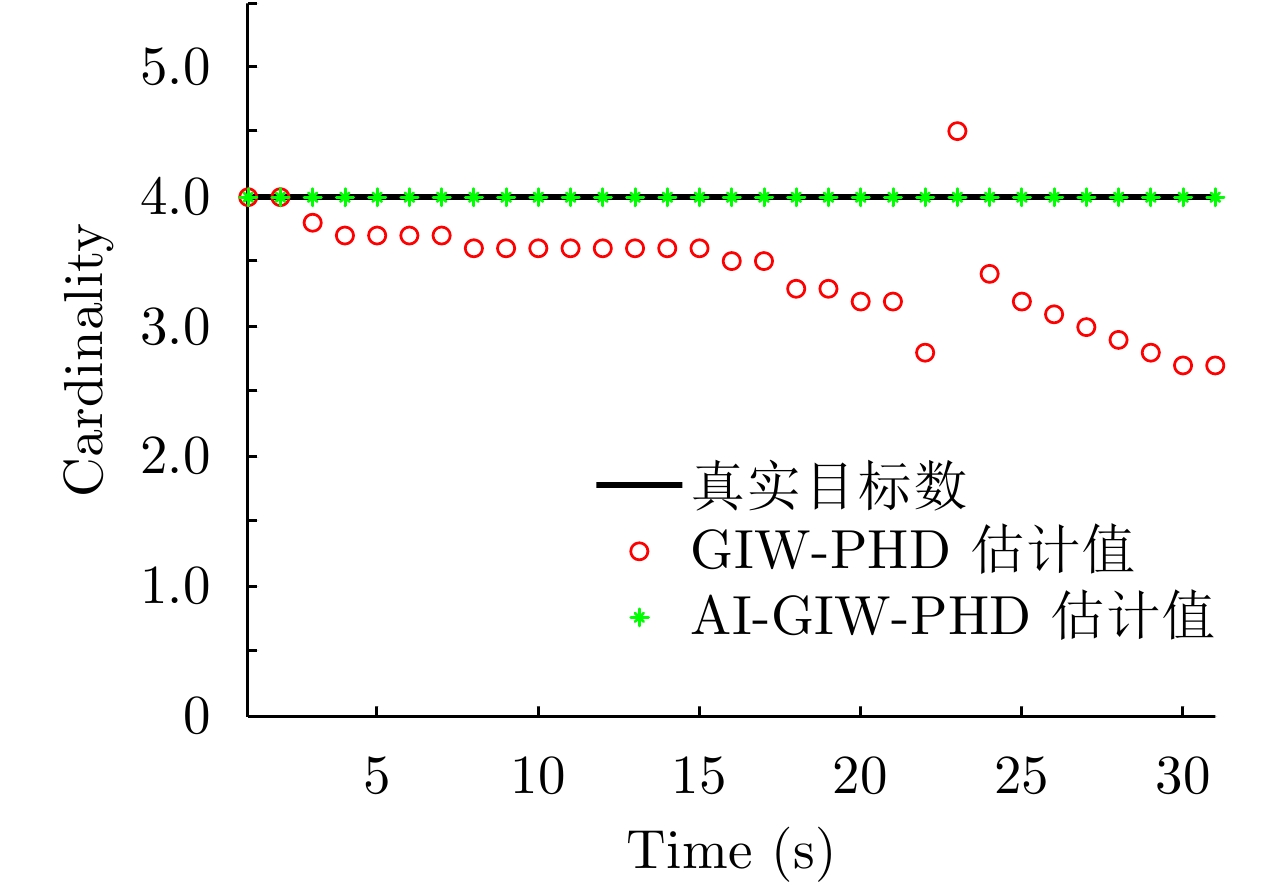
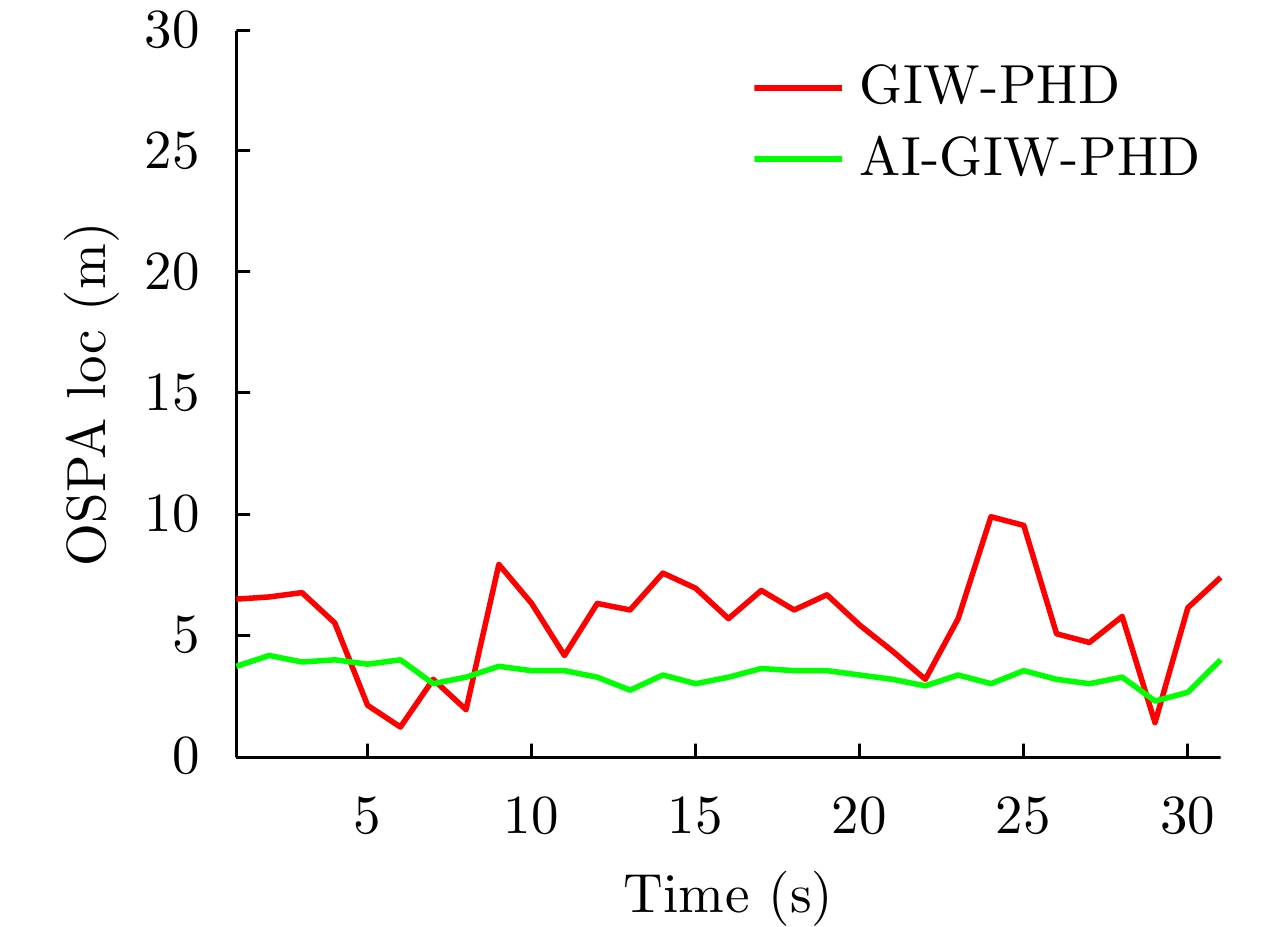
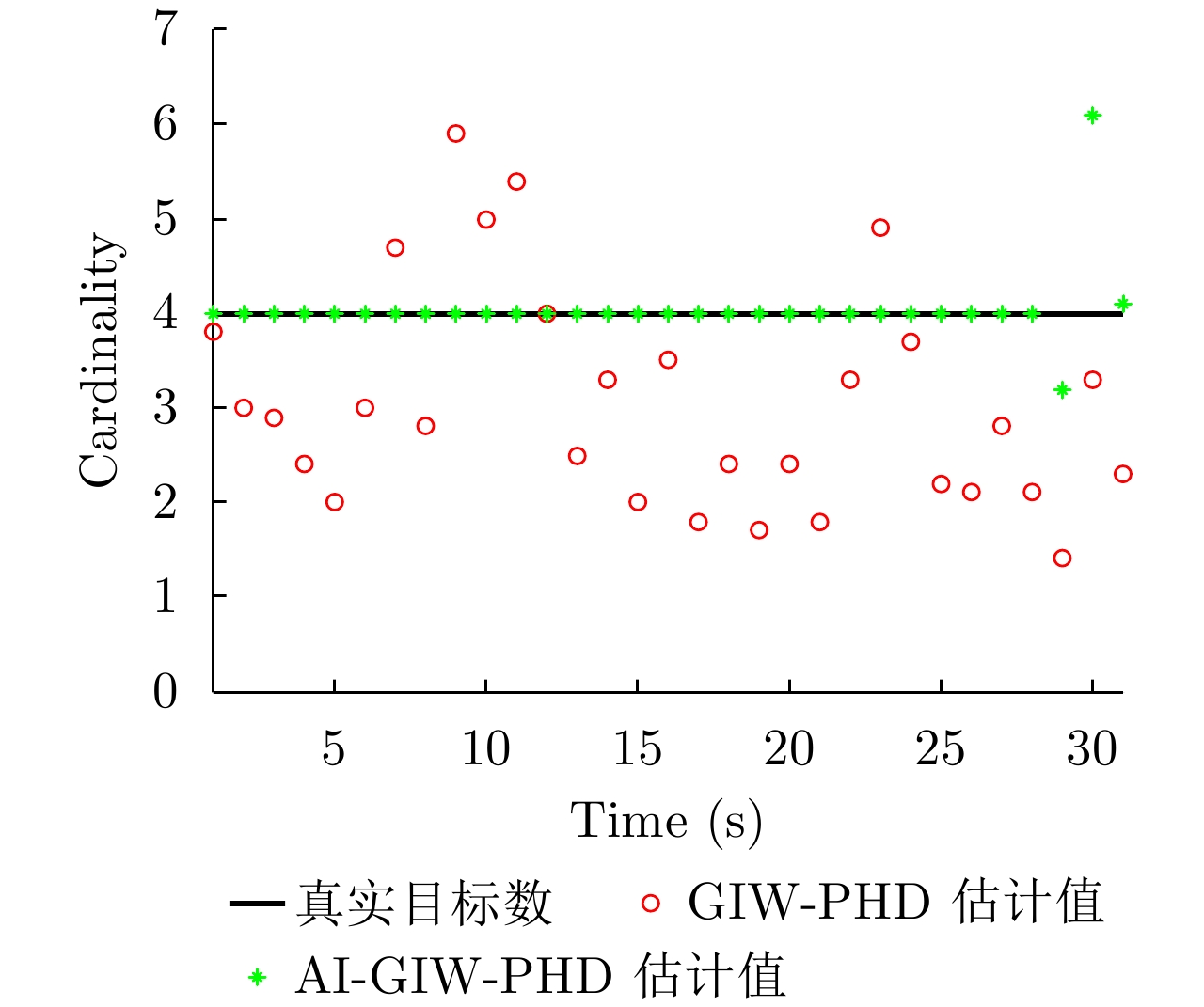
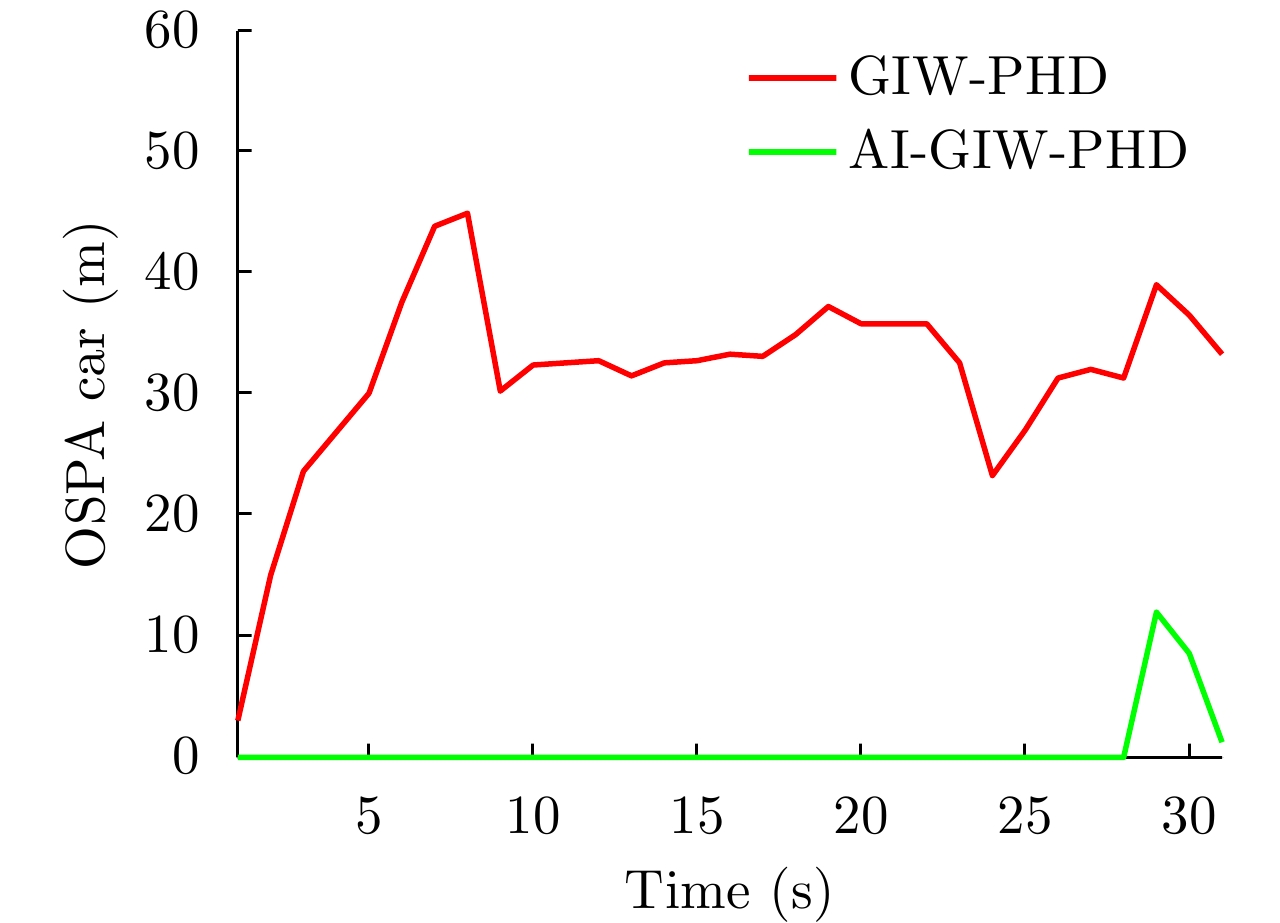
基于随机有限集的扩展目标跟踪方法通常根据量测的空间信息进行量测划分,在杂波密集环境下有可能将杂波量测划入目标单元,从而造成跟踪性能的下降。为此,该文将目标和杂波的幅度信息引入高斯逆威沙特概率假设密度(GIW-PHD)滤波器,通过计算量测子集的幅度似然寻找最优的量测划分方法。此外,计算量测单元的中心时,采用幅度加权的方法计算量测单元的质量中心,以取代目前广泛使用的几何中心,从而进一步降低杂波对滤波器的干扰。在信杂比分别为13 dB和6 dB的条件下,通过对Rayleigh杂波中Swerling 1型起伏目标的跟踪结果证明了所提方法相比高斯逆威沙特概率假设密度滤波器具有更优的势估计和状态估计性能。 基于随机有限集的扩展目标跟踪方法通常根据量测的空间信息进行量测划分,在杂波密集环境下有可能将杂波量测划入目标单元,从而造成跟踪性能的下降。为此,该文将目标和杂波的幅度信息引入高斯逆威沙特概率假设密度(GIW-PHD)滤波器,通过计算量测子集的幅度似然寻找最优的量测划分方法。此外,计算量测单元的中心时,采用幅度加权的方法计算量测单元的质量中心,以取代目前广泛使用的几何中心,从而进一步降低杂波对滤波器的干扰。在信杂比分别为13 dB和6 dB的条件下,通过对Rayleigh杂波中Swerling 1型起伏目标的跟踪结果证明了所提方法相比高斯逆威沙特概率假设密度滤波器具有更优的势估计和状态估计性能。
基于随机有限集的扩展目标跟踪方法通常根据量测的空间信息进行量测划分,在杂波密集环境下有可能将杂波量测划入目标单元,从而造成跟踪性能的下降。为此,该文将目标和杂波的幅度信息引入高斯逆威沙特概率假设密度(GIW-PHD)滤波器,通过计算量测子集的幅度似然寻找最优的量测划分方法。此外,计算量测单元的中心时,采用幅度加权的方法计算量测单元的质量中心,以取代目前广泛使用的几何中心,从而进一步降低杂波对滤波器的干扰。在信杂比分别为13 dB和6 dB的条件下,通过对Rayleigh杂波中Swerling 1型起伏目标的跟踪结果证明了所提方法相比高斯逆威沙特概率假设密度滤波器具有更优的势估计和状态估计性能。 基于随机有限集的扩展目标跟踪方法通常根据量测的空间信息进行量测划分,在杂波密集环境下有可能将杂波量测划入目标单元,从而造成跟踪性能的下降。为此,该文将目标和杂波的幅度信息引入高斯逆威沙特概率假设密度(GIW-PHD)滤波器,通过计算量测子集的幅度似然寻找最优的量测划分方法。此外,计算量测单元的中心时,采用幅度加权的方法计算量测单元的质量中心,以取代目前广泛使用的几何中心,从而进一步降低杂波对滤波器的干扰。在信杂比分别为13 dB和6 dB的条件下,通过对Rayleigh杂波中Swerling 1型起伏目标的跟踪结果证明了所提方法相比高斯逆威沙特概率假设密度滤波器具有更优的势估计和状态估计性能。


2020, 9(4): 739-752.
摘要:
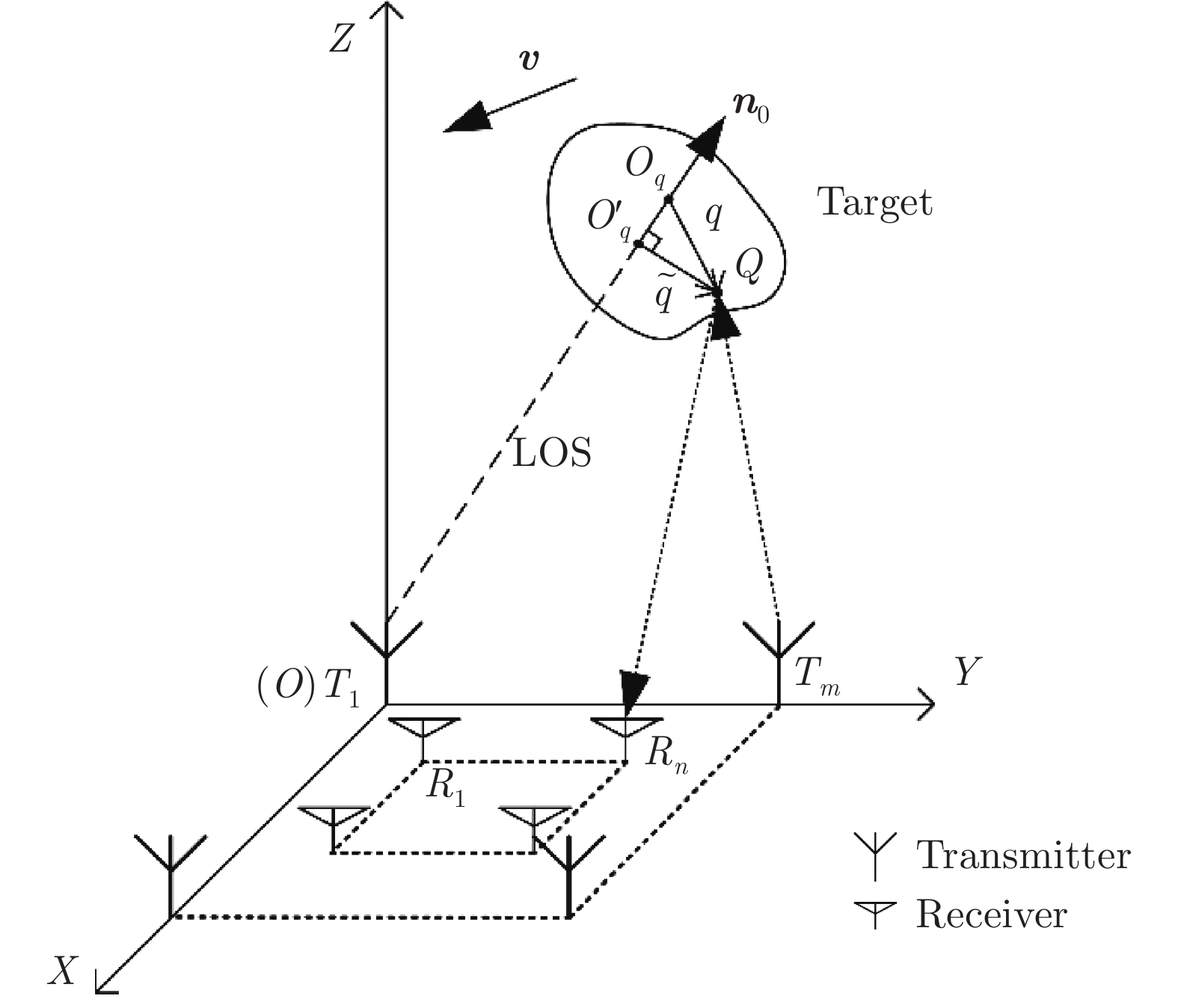
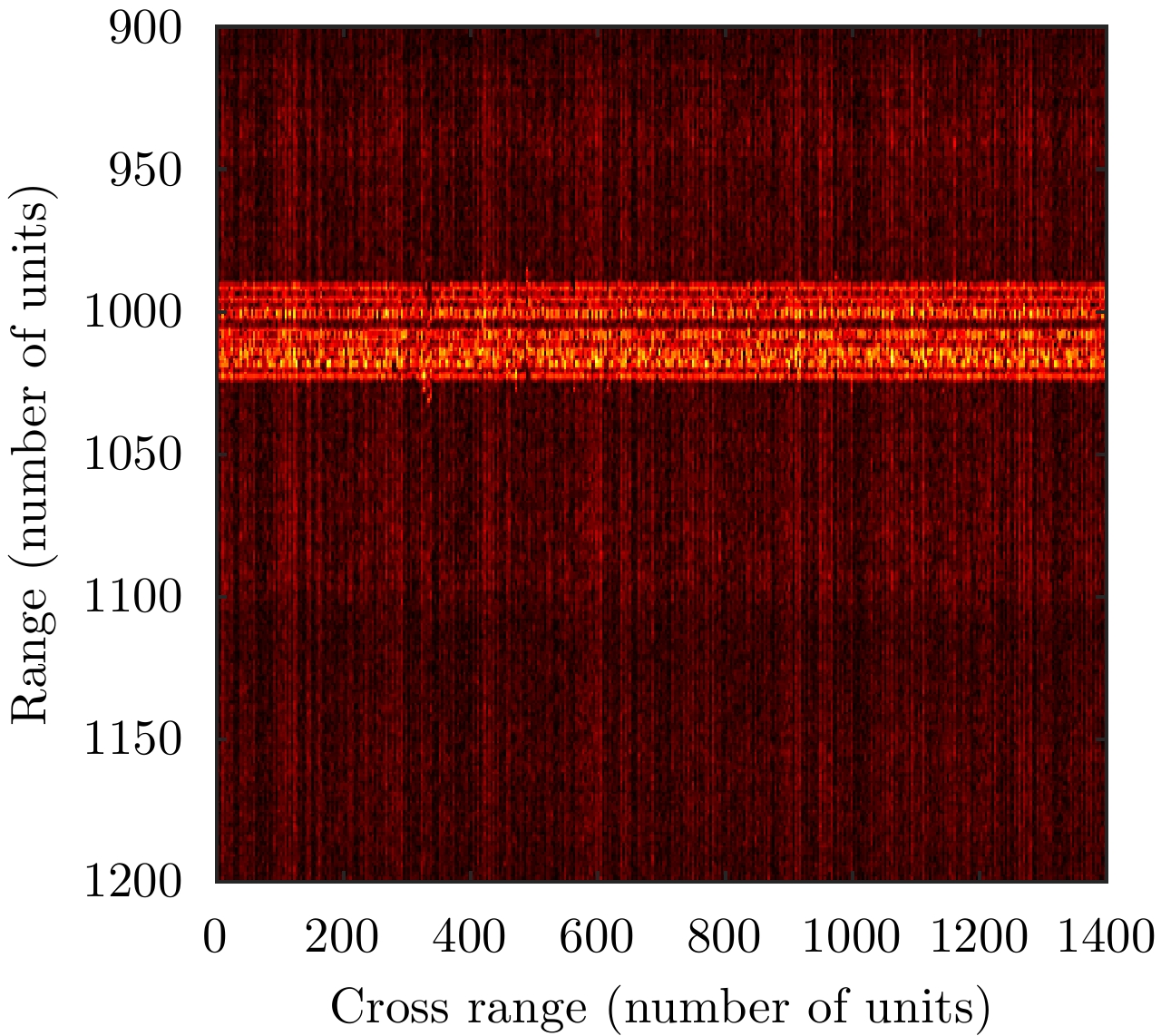
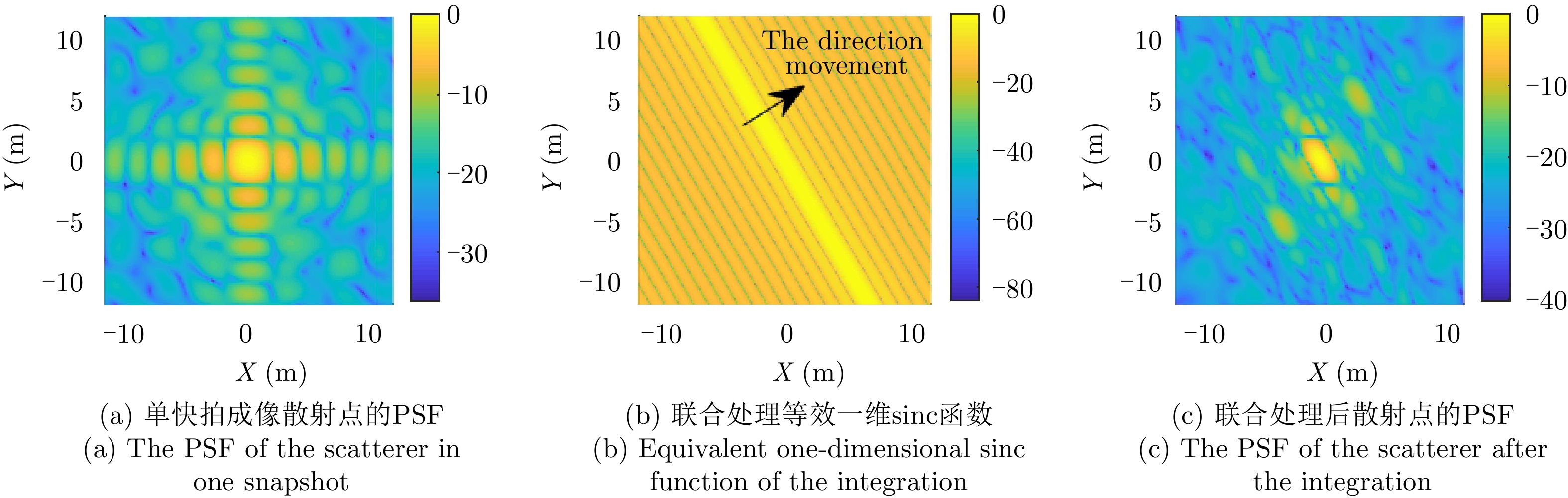
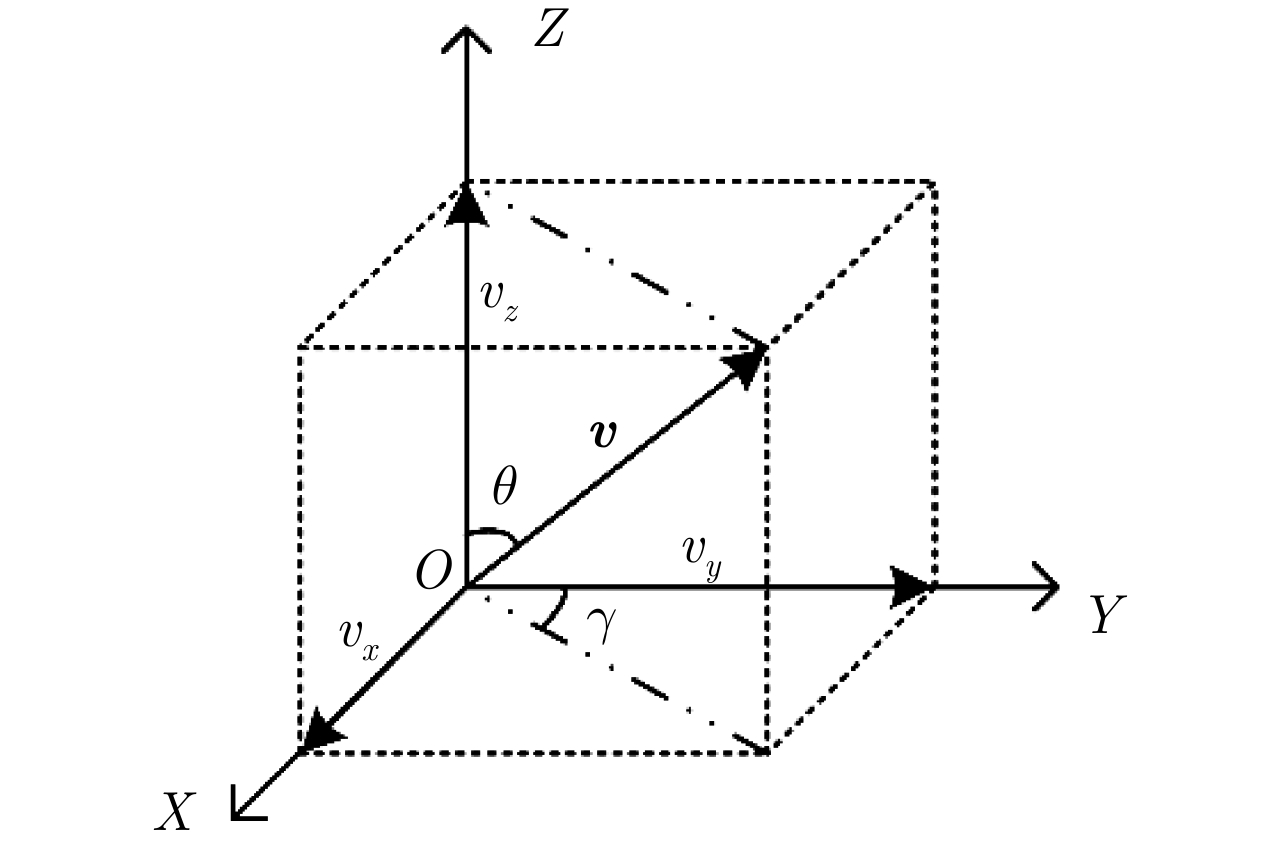
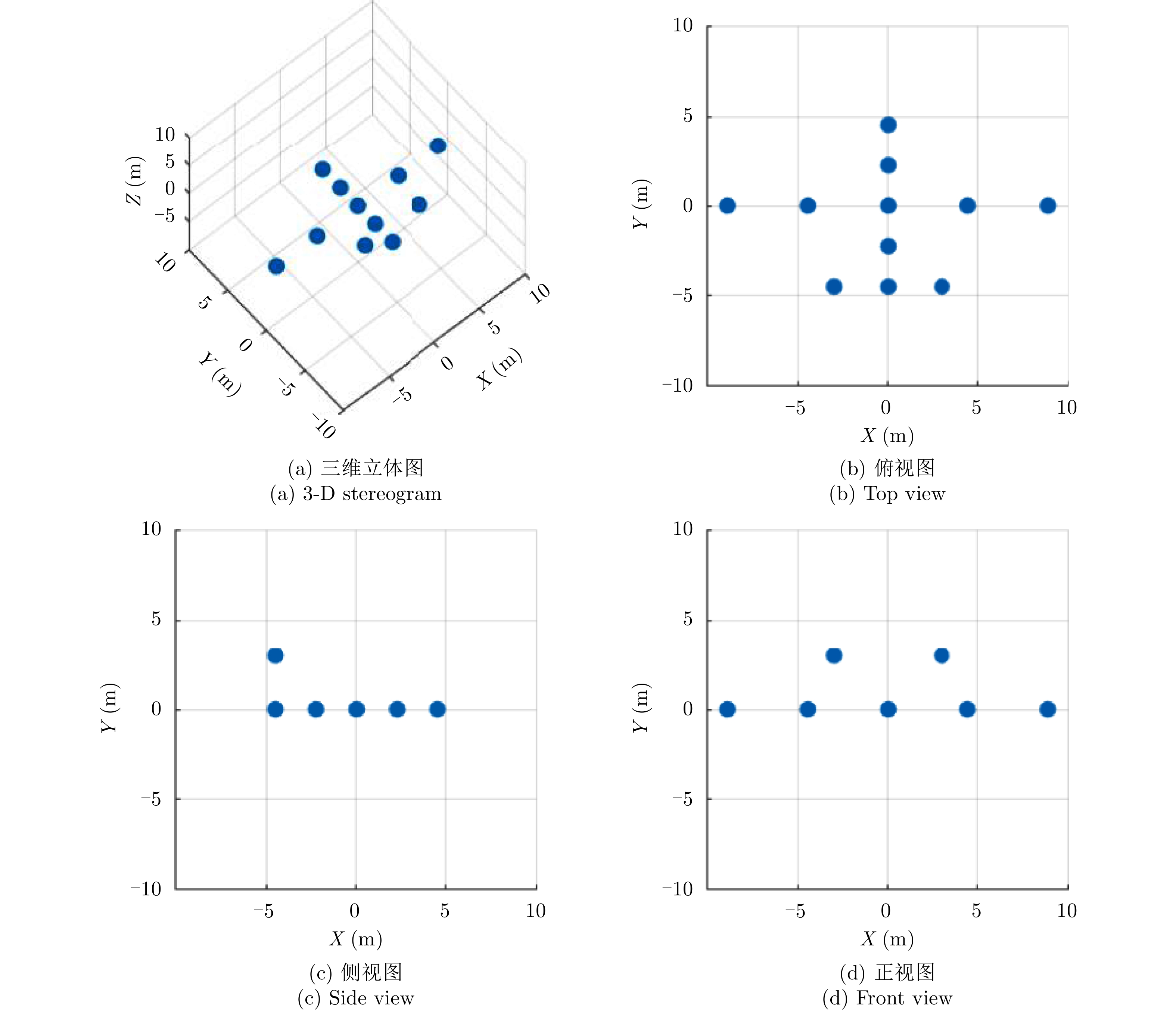
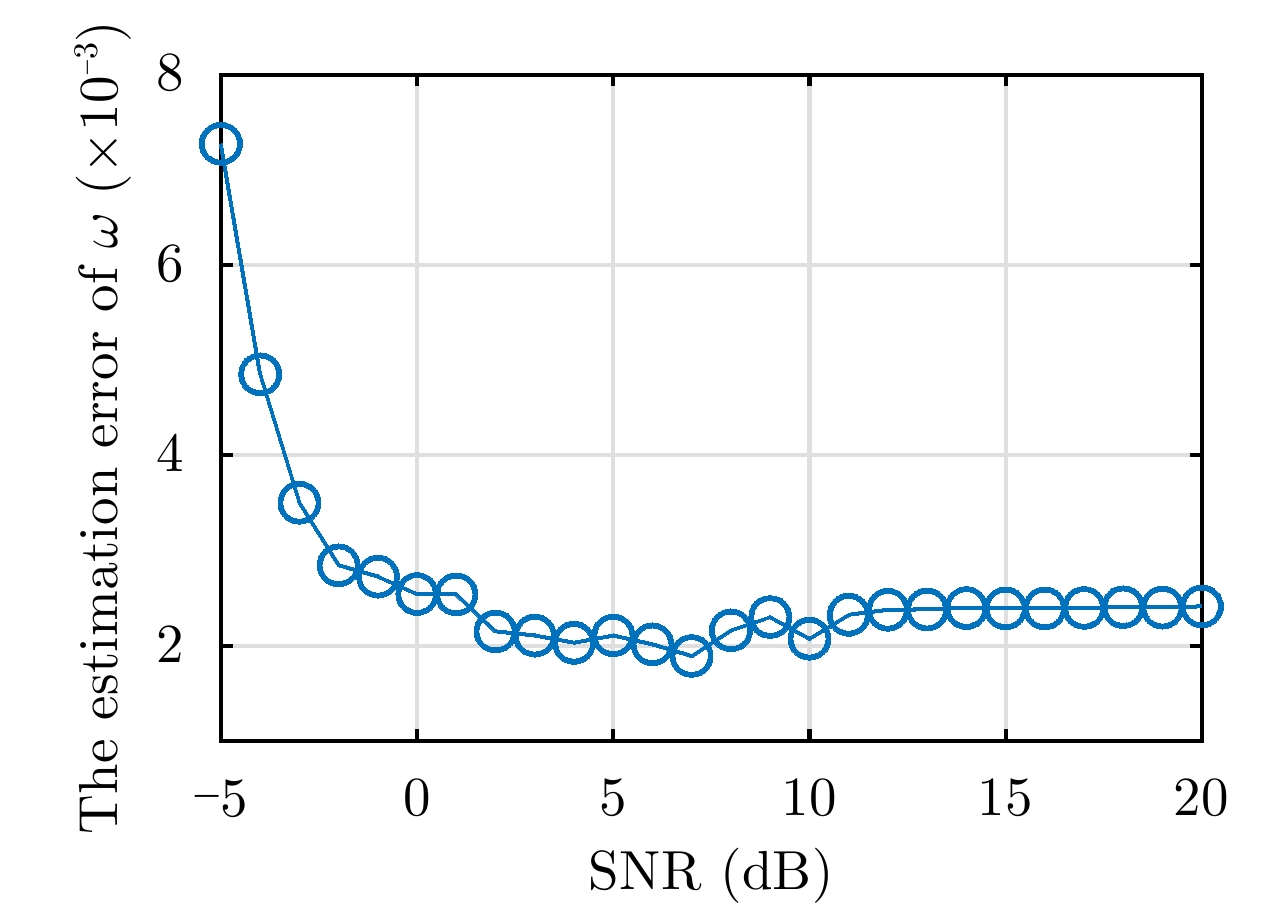
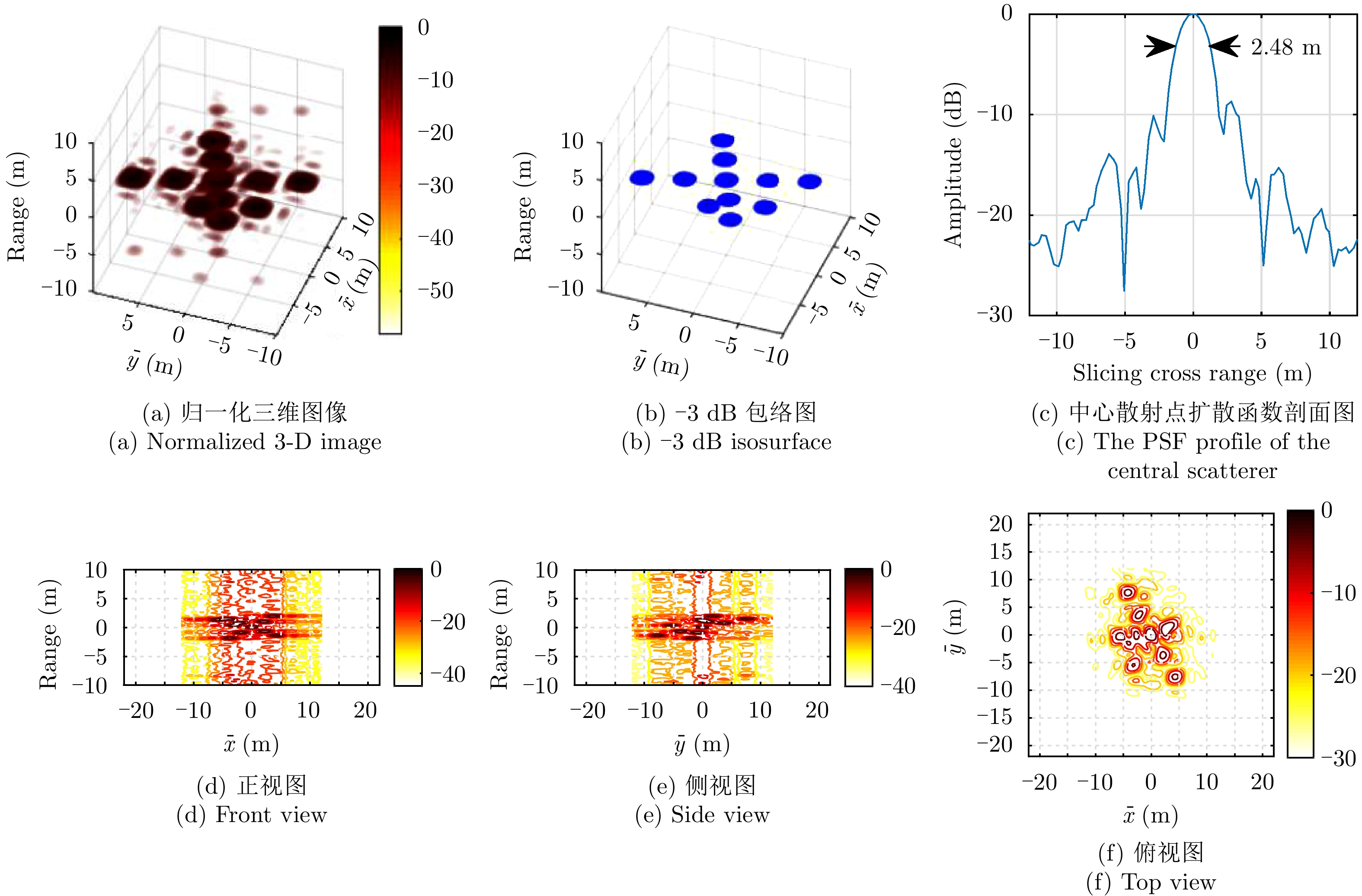
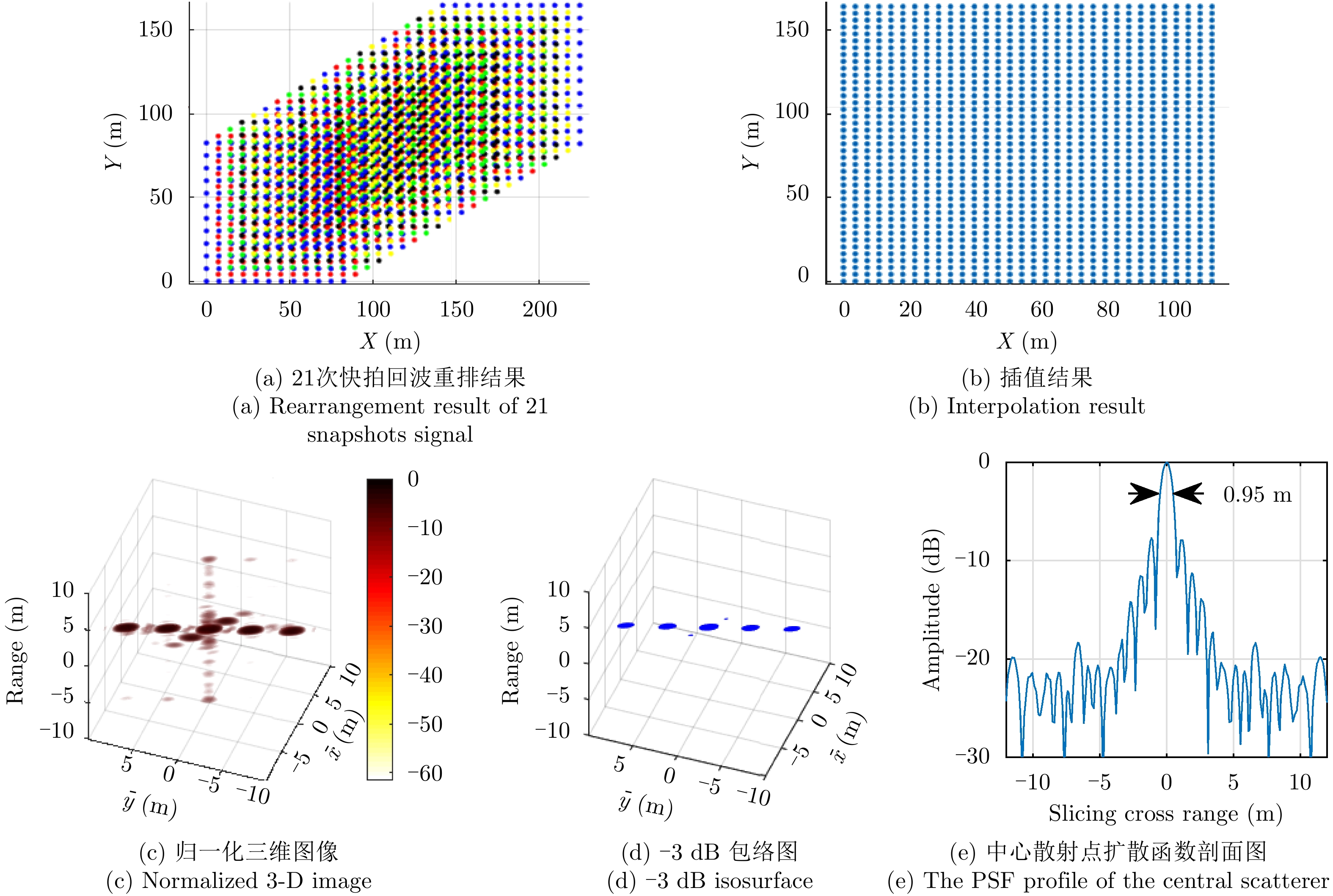
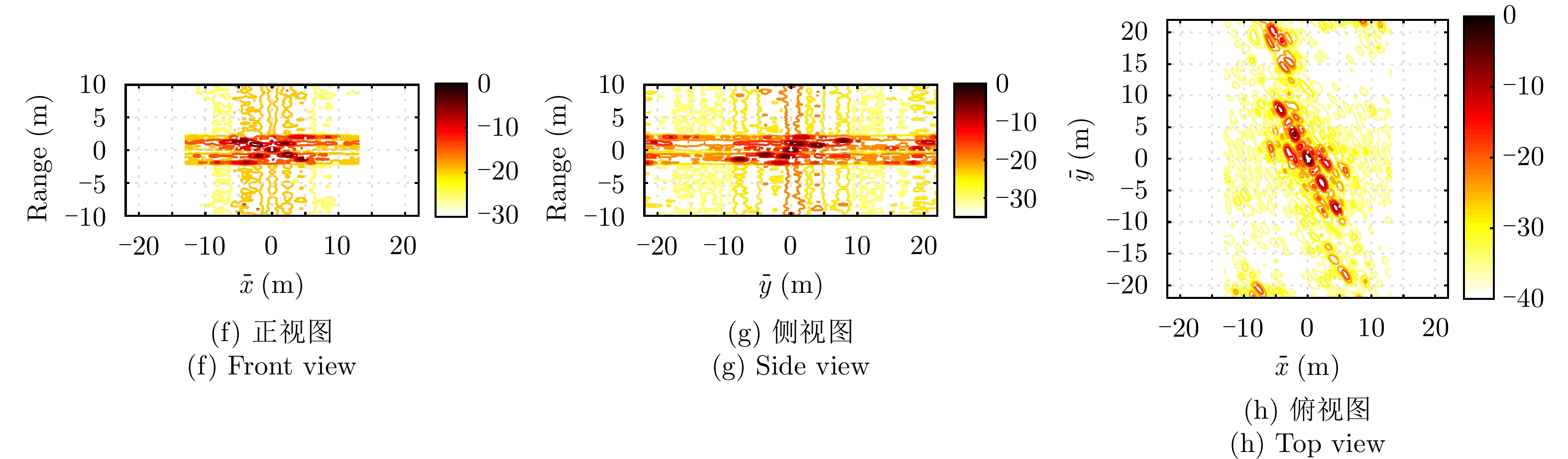
为了提高多输入多输出(MIMO)雷达三维成像沿运动方向的方位分辨率,该文从多快拍图像联合利用的角度入手,提出一种新的多输入多输出-逆合成孔径雷达(MIMO-ISAR)三维成像方法。其基本思路是通过对一段时间观测下二维平面阵列获取的多个单快拍三维图像进行相干处理,沿着散射点线性拟合的方向提取峰值并重构出新的三维图像。仿真实验结果表明,与单快拍三维成像方法相比,该方法可以显著提高成像结果沿运动方向的方位分辨率;与现有基于重排和插值的经典MIMO-ISAR方法相比,该方法对慢速和快速运动目标均适用,得到的成像结果聚焦良好并能够有效抑制沿运动方向的旁瓣。
为了提高多输入多输出(MIMO)雷达三维成像沿运动方向的方位分辨率,该文从多快拍图像联合利用的角度入手,提出一种新的多输入多输出-逆合成孔径雷达(MIMO-ISAR)三维成像方法。其基本思路是通过对一段时间观测下二维平面阵列获取的多个单快拍三维图像进行相干处理,沿着散射点线性拟合的方向提取峰值并重构出新的三维图像。仿真实验结果表明,与单快拍三维成像方法相比,该方法可以显著提高成像结果沿运动方向的方位分辨率;与现有基于重排和插值的经典MIMO-ISAR方法相比,该方法对慢速和快速运动目标均适用,得到的成像结果聚焦良好并能够有效抑制沿运动方向的旁瓣。








 微信 | 公众平台
微信 | 公众平台 

