
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
Status and Prospects of Feature-based Detection Methods for Floating Targets on the Sea Surface (in English)
-
摘要: 海杂波背景下的雷达目标检测对民用和军事都有着重要的意义。随着海面目标的小型化和隐身化,海面慢速、漂浮小目标已经成为了雷达警戒的重点对象。关于此类小目标的检测一直以来都是海杂波背景下目标检测中的难题。通常,漂浮小目标的雷达散射横截面积(RCS)微弱,并且运动速度慢,常常在时域和频域均存在“超杂波检测”的困难。传统目标检测方法对漂浮小目标的检测存在明显的性能瓶颈。对于海面漂浮小目标的检测,采用高多普勒和高距离分辨体制(“双高”体制)是从雷达体制上解决这个问题的有效途径。在双高体制下,雷达接收的目标回波提供了更多的可用信息。然而,如何将这些更加精细化的信息转化为探测性能的提升,一直以来都是雷达届关注的难点,相关科研成果也一直在不断地推陈出新。近些年,在双高雷达体制下,学者们提出了多种基于特征的目标检测方法,作为对海智能检测的人工特征工程阶段,这些方法缓解了仅依靠能量信息较难检测小目标的困难局面,极大程度地改善了对漂浮小目标的检测性能。为了更好地让相关雷达从业者了解该领域这些年的发展和未来的趋势,该文首先总结了对海检测的难点和常用的目标检测方法,然后分析了特征检测的原理和通用框架以及国内外几种典型的基于特征的检测方法,最后对特征检测方法发展趋势进行了展望。Abstract: Radar target detection in sea clutter is of significance to both the civil and military applications. With the miniaturization and invisibility of sea targets, Small Floating Targets (SFTs) with slow speed have become the focus of radar detection. However, the detection of SFTs in the background of sea clutter has always been a challenging problem. SFTs usually have a weak Radar Cross Section (RCS) and slow speed, making them difficult to be detected in sea clutter. Traditional target detection methods exhibit poor performance in the detection of SFTs. For the detection of small and weak targets on the sea surface, a high Doppler resolution and high range resolution system (double-high system) is an effective approach to solve this problem. In the double-high system, the target echo received by the radar provides readily available and sufficient information. However, how to transform and refine this information to improve detection performance has always been a challenge to the radar industry. In recent years, as an artificial feature engineering stage for intelligent radar target detection, scholars have proposed various feature-based target detection methods based on the double-high system to alleviate the difficulty of SFT detection when relying only on energy information and to considerably improve the detection performance. To ensure that relevant radar practitioners better understand the development of this field in recent years and the future trend, this paper summarizes the difficulties of sea target detection and common target detection methods, analyzes the principle and general framework of feature detection and several typical feature-based detection methods, and explores the development trend of feature-based detection methods.
-

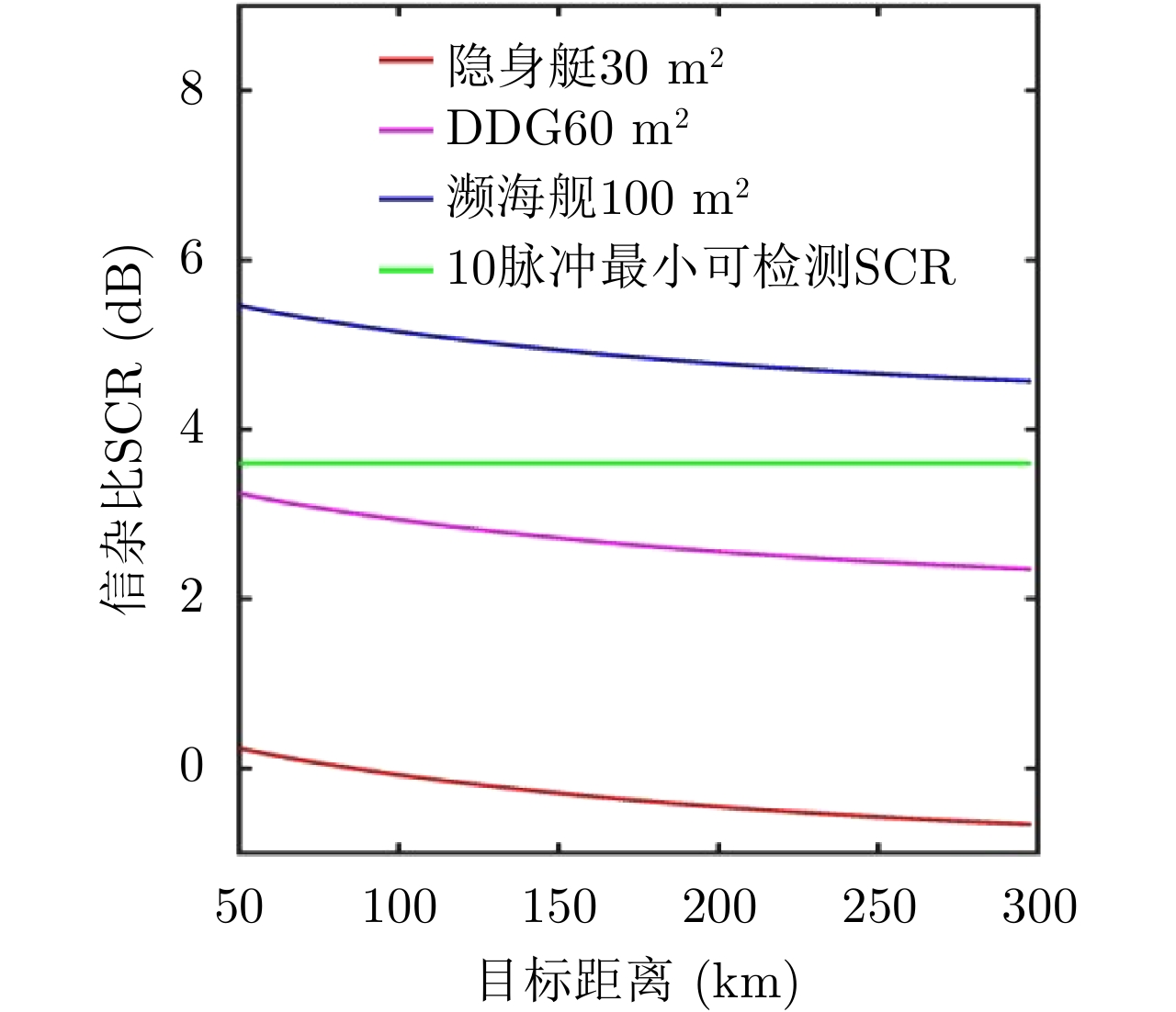
图 4 VV极化、逆风情况下,海况4级时各种不同舰船的信杂比
Figure 4. In the case of headwind situation, SCR for various ships at sea state 4 (VV polarization)
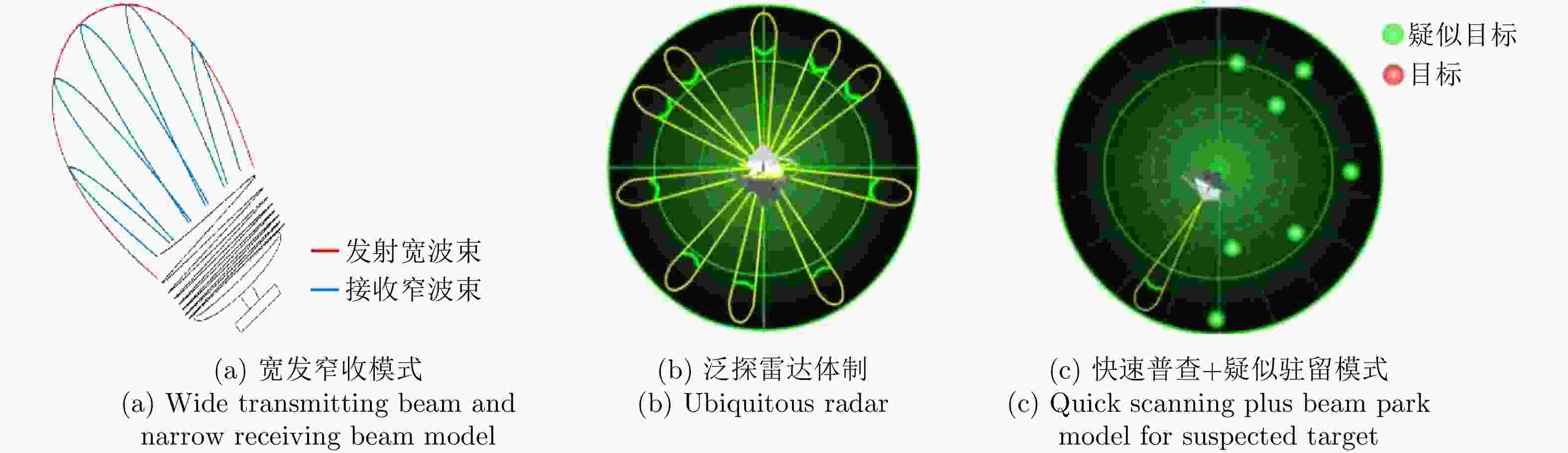
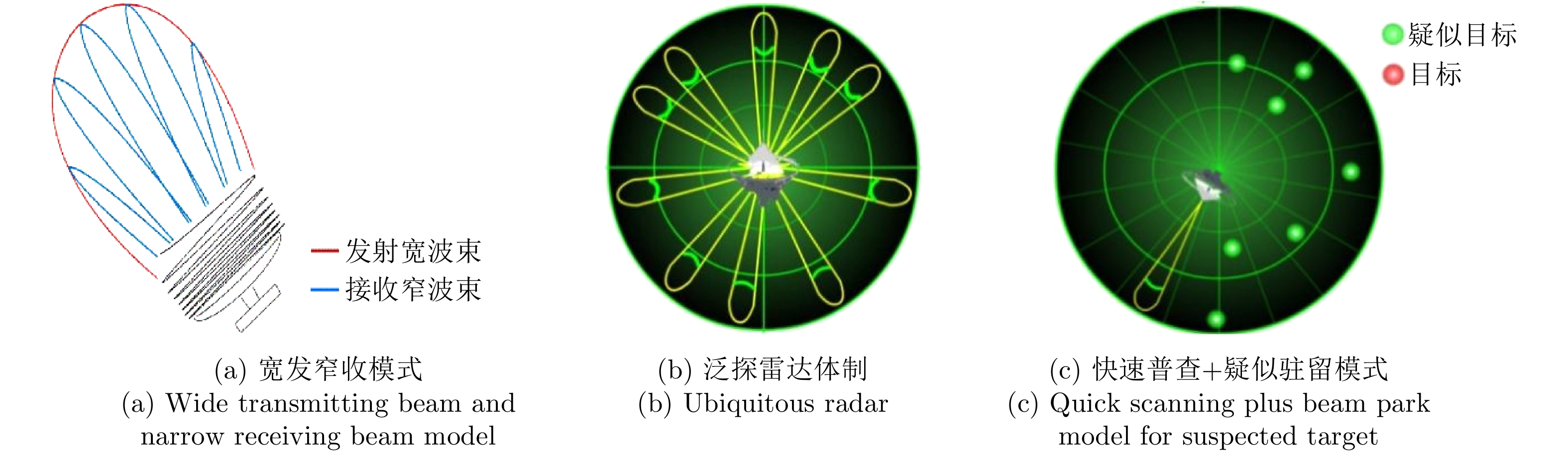
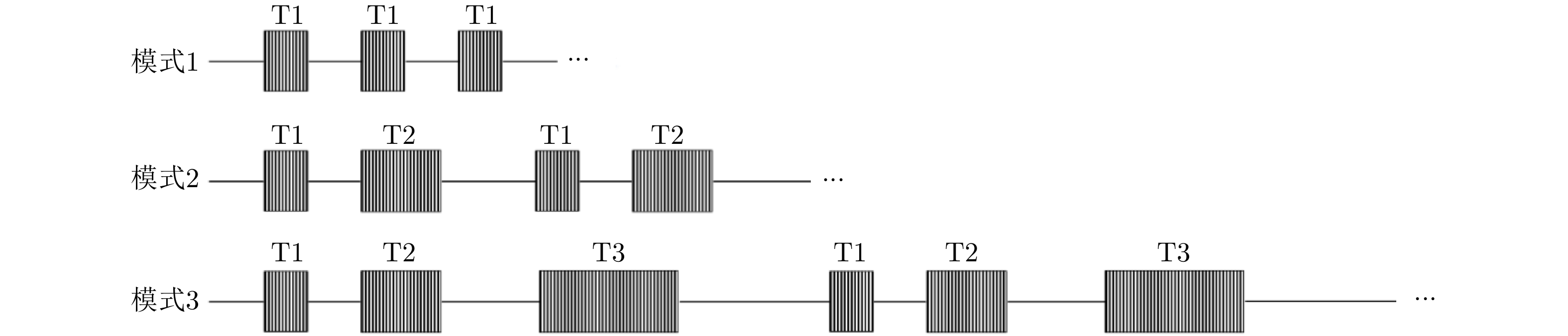
图 5 可实现“双高”体制的雷达工作模式
Figure 5. Radar working modes that realize the "double high" system


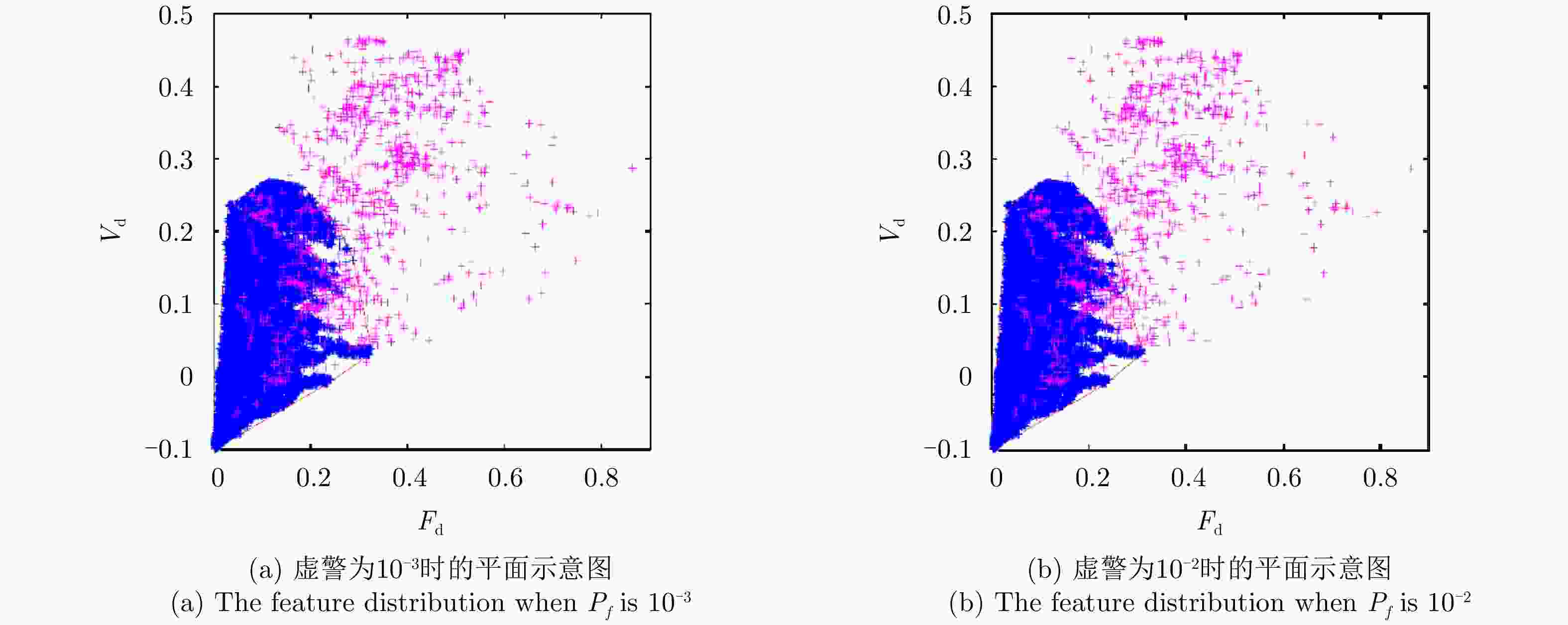

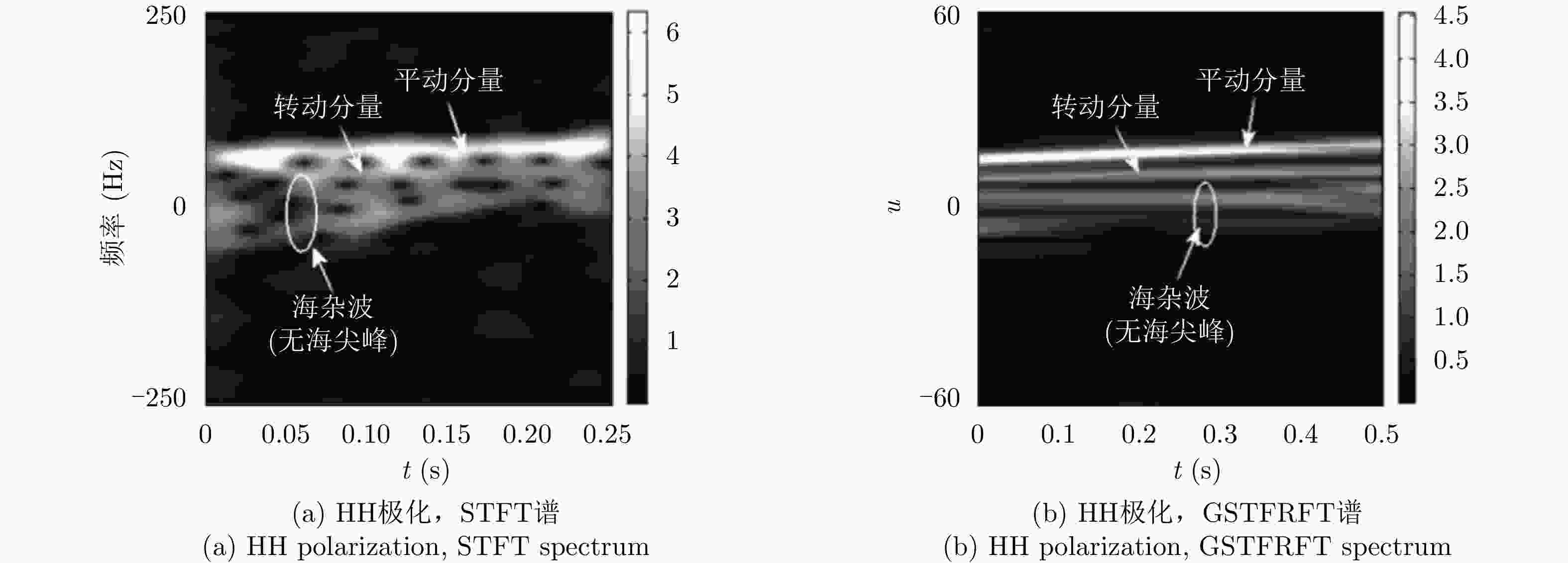
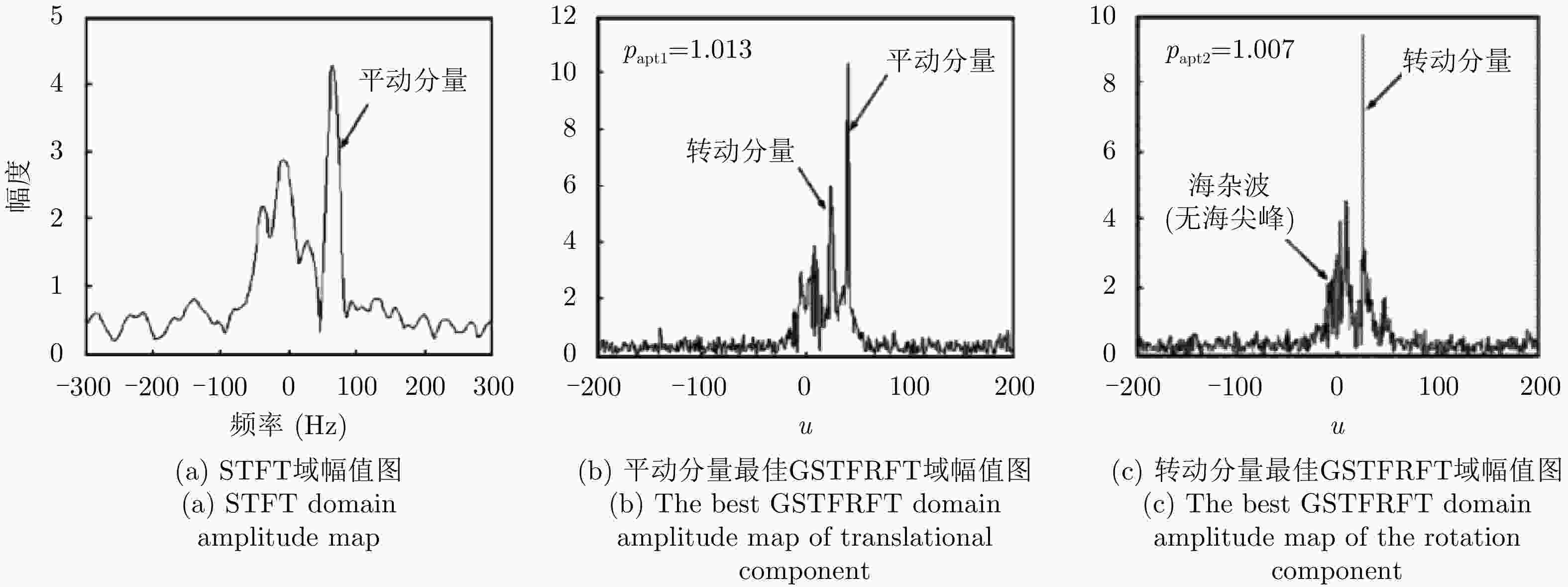
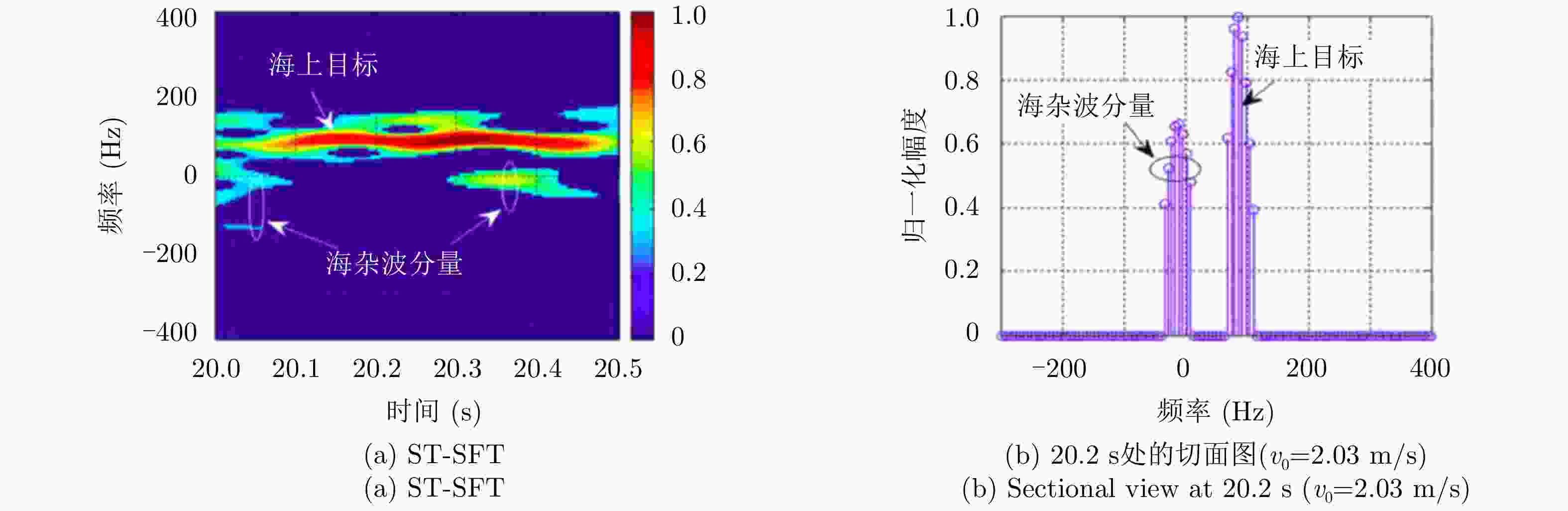

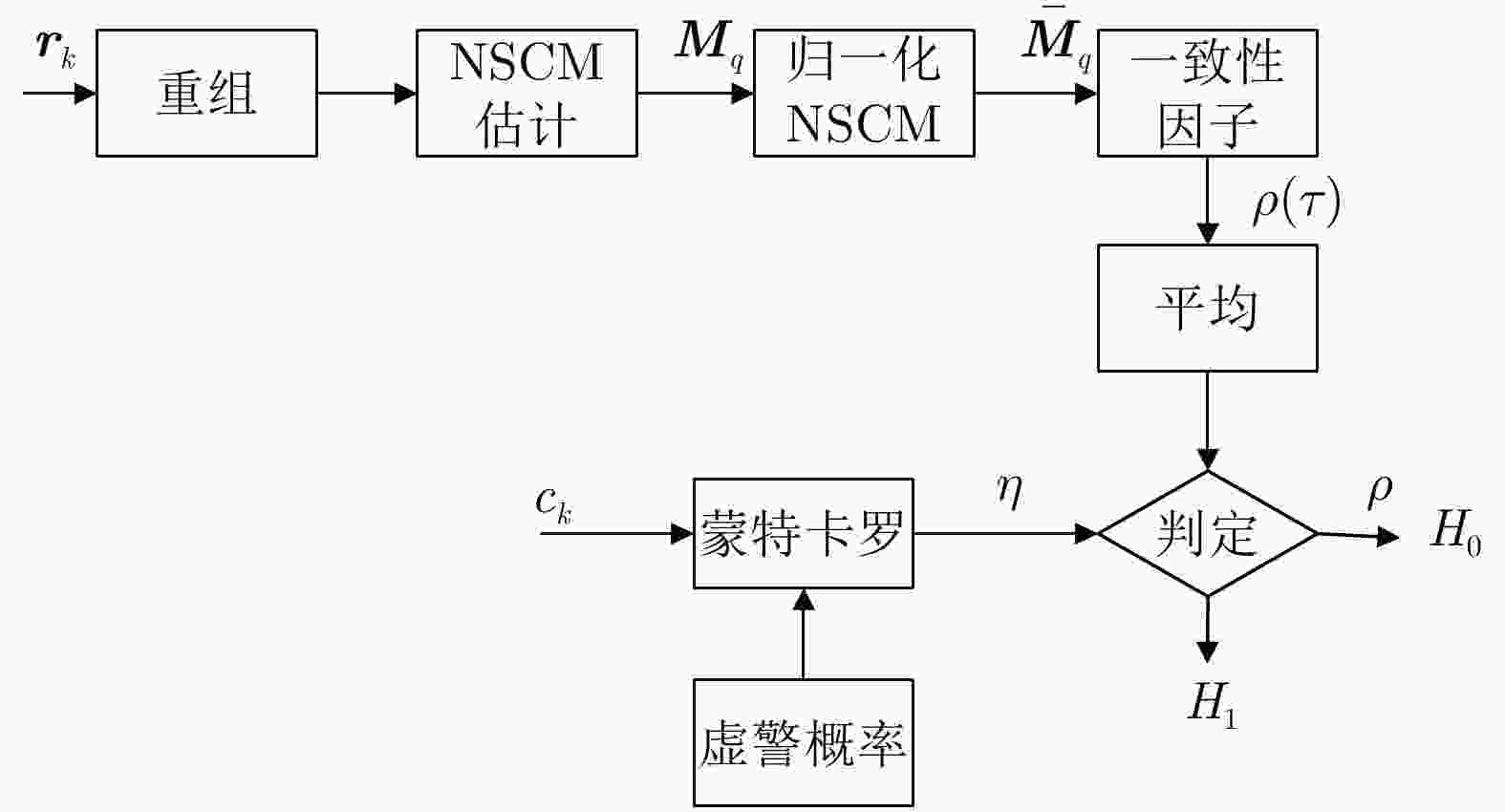
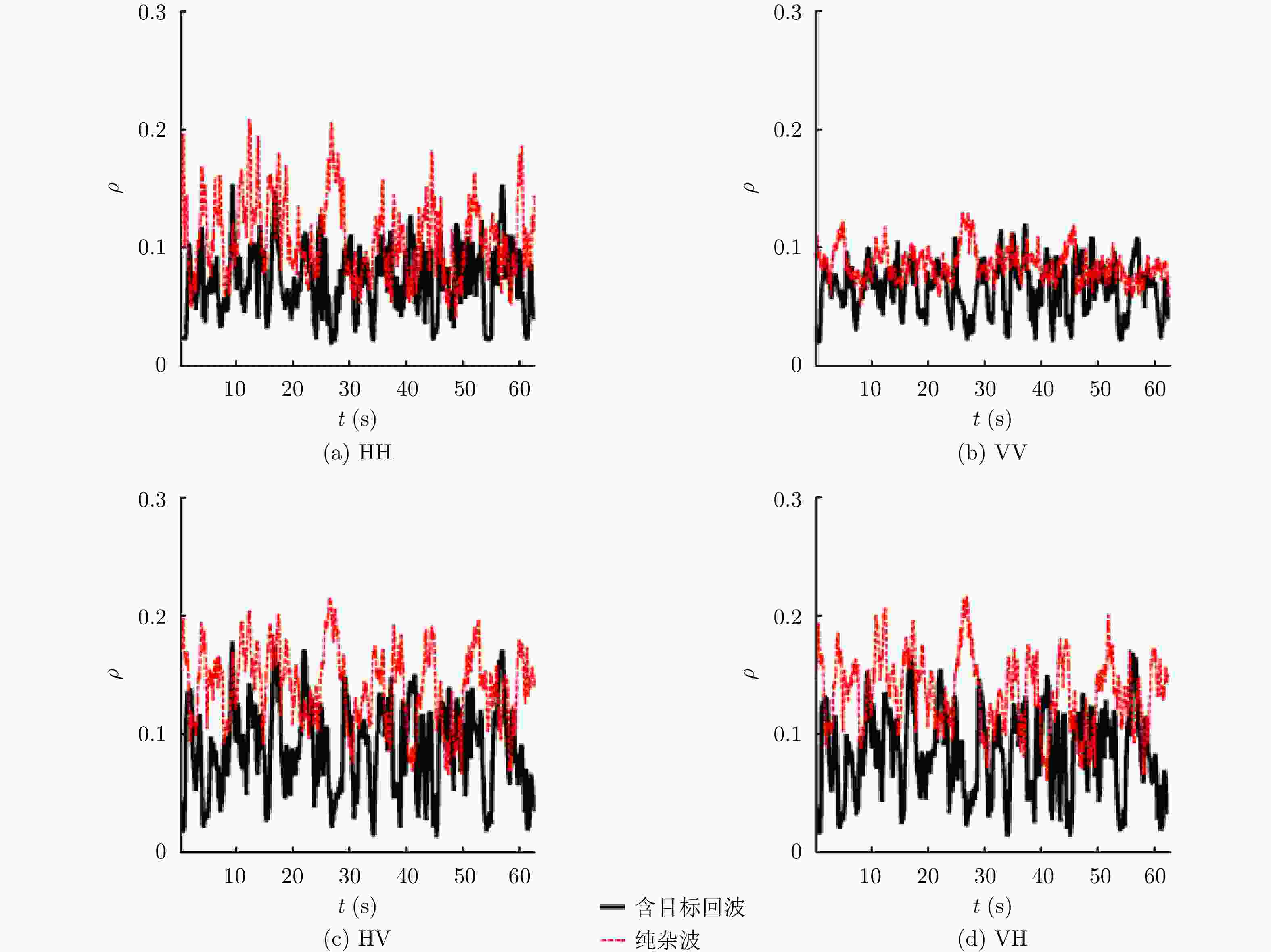
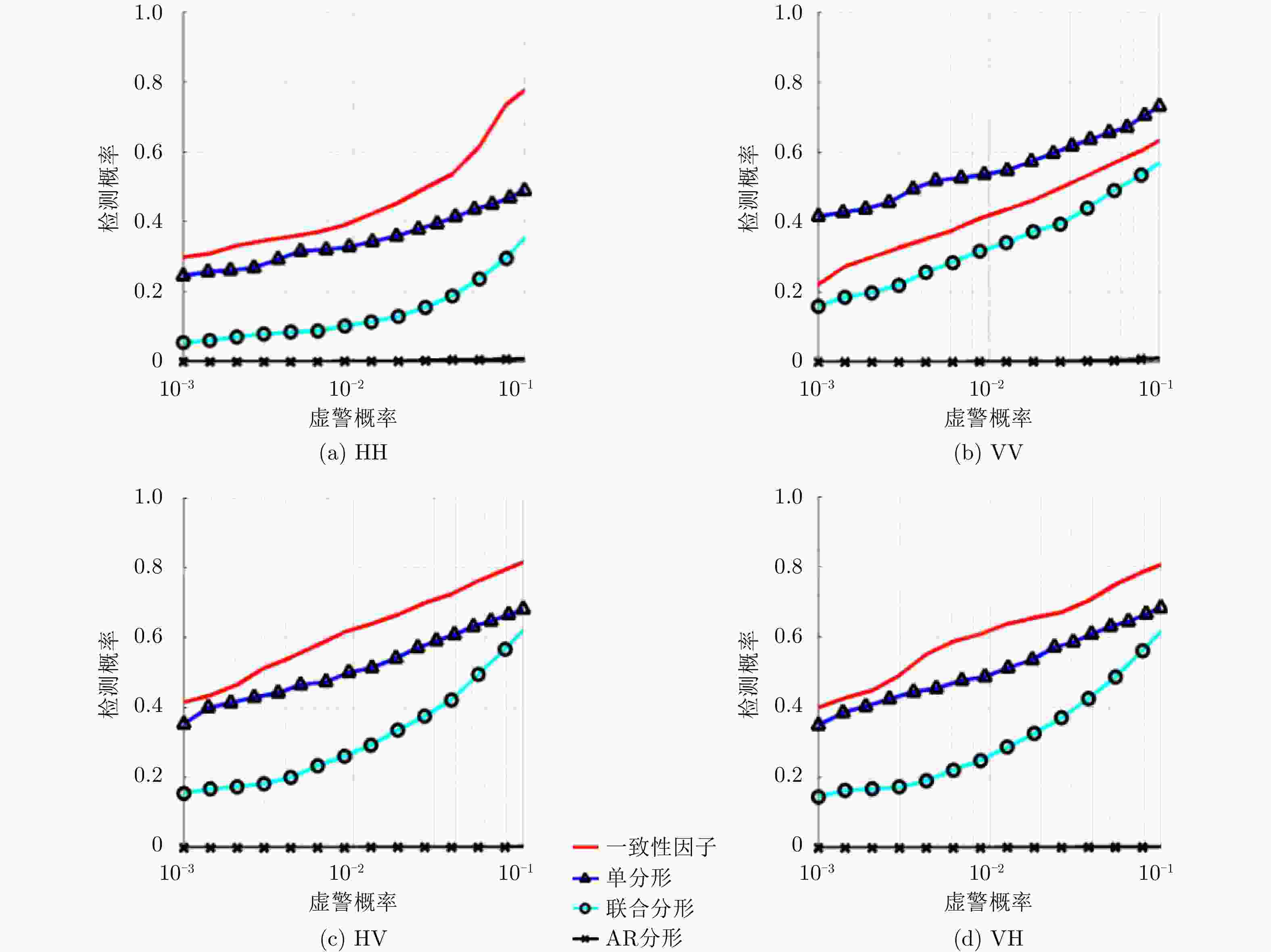

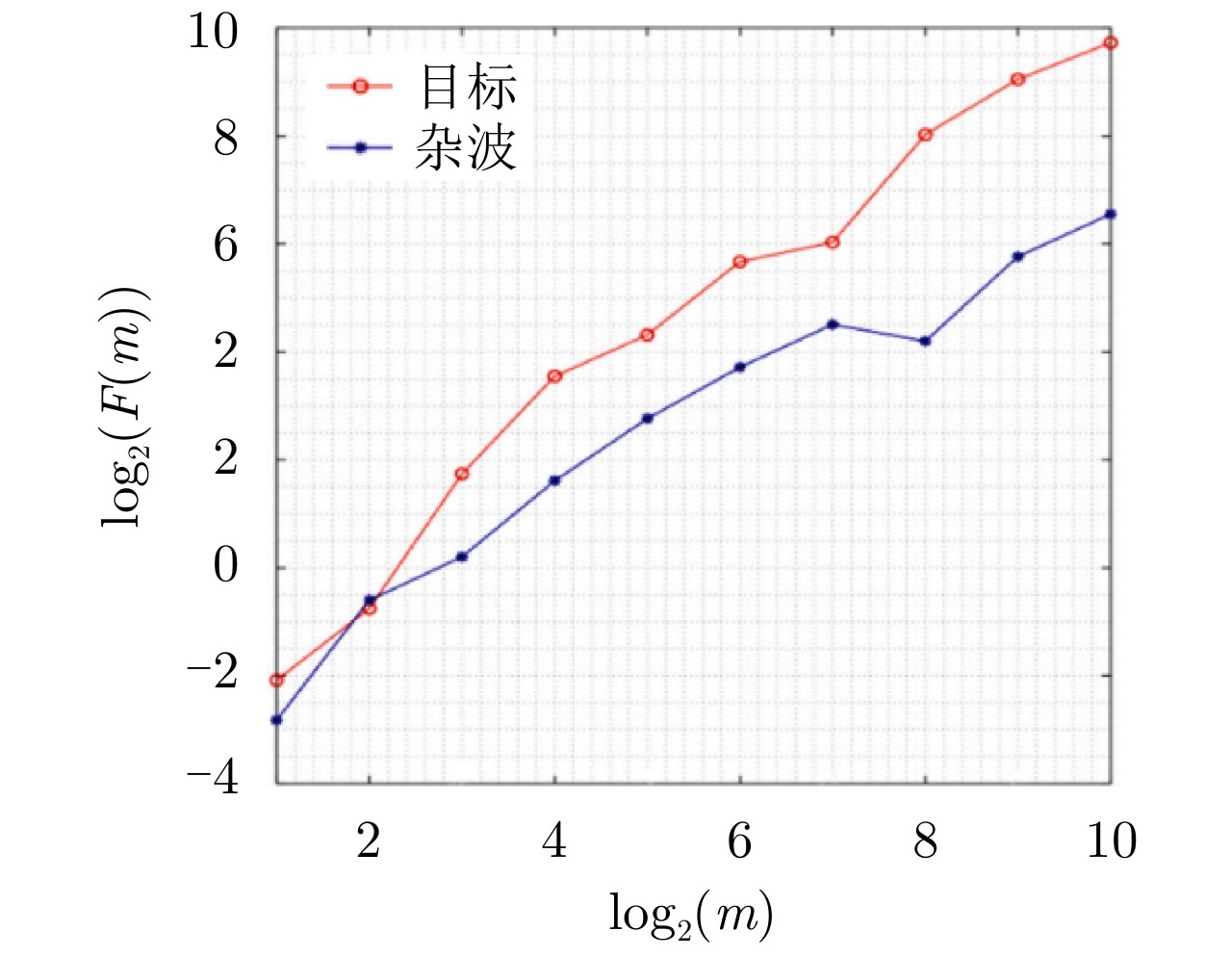
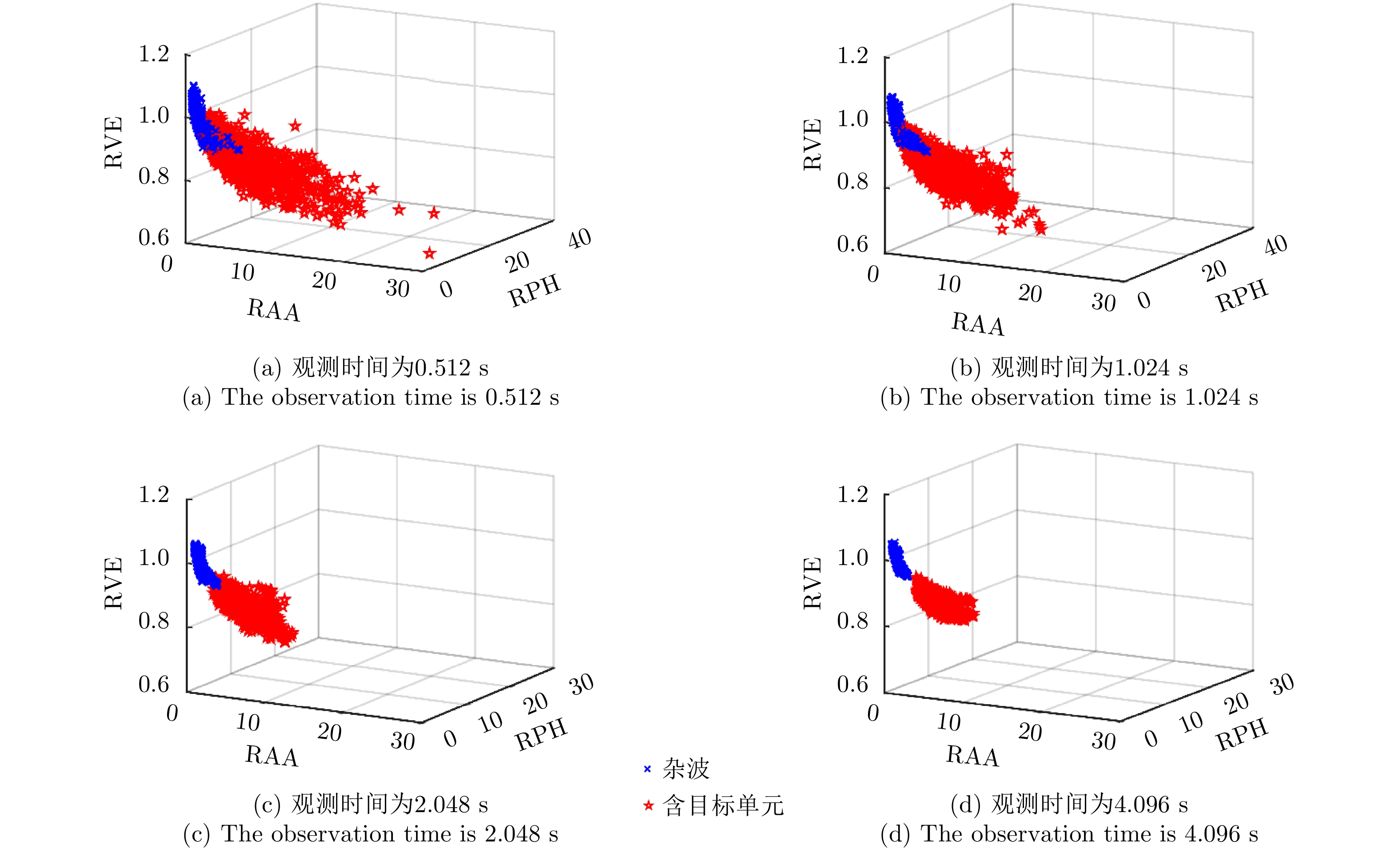
图 30 纯杂波与目标在特征空间中的分布情况
Figure 30. Distributions of features of clutter-only vectors and vectors with target in 3D feature space
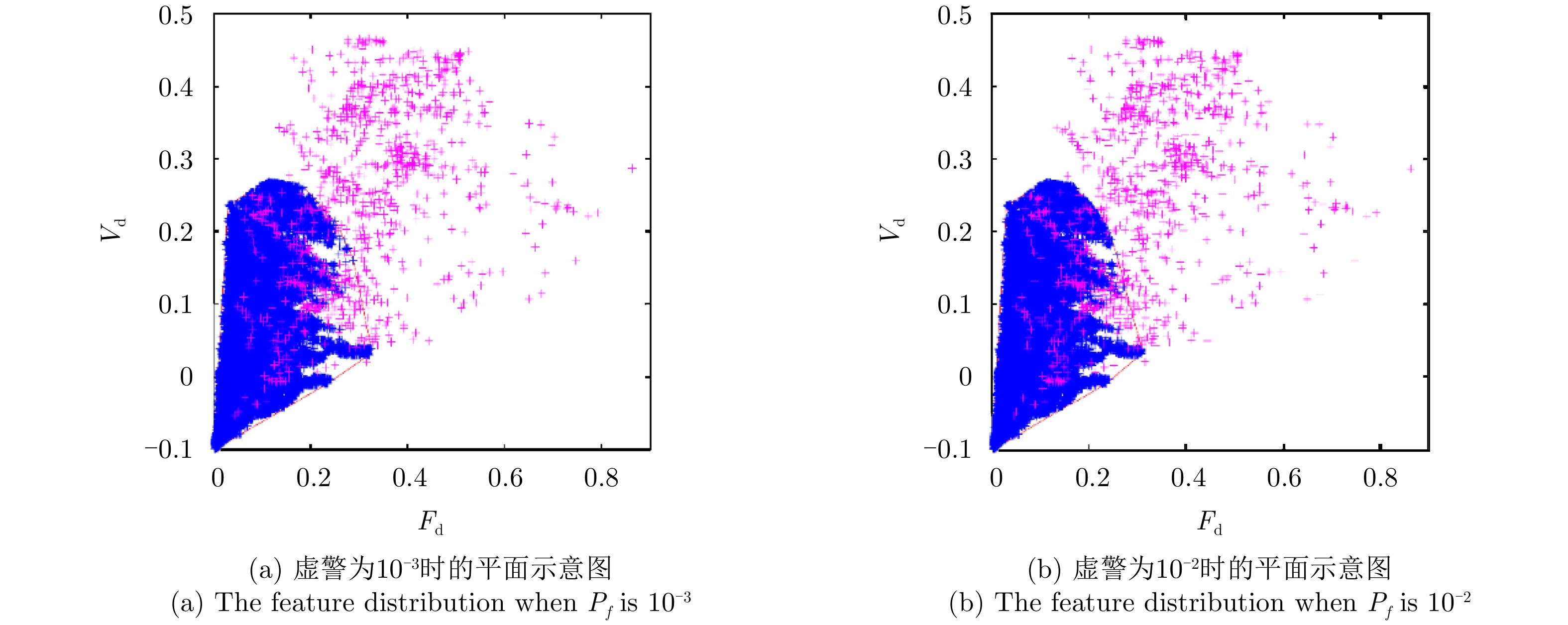
图 31 原始数据生成的凸包和给定虚警率的凸包
Figure 31. Convex hull with the original training data and convex hull with given false alarm rate

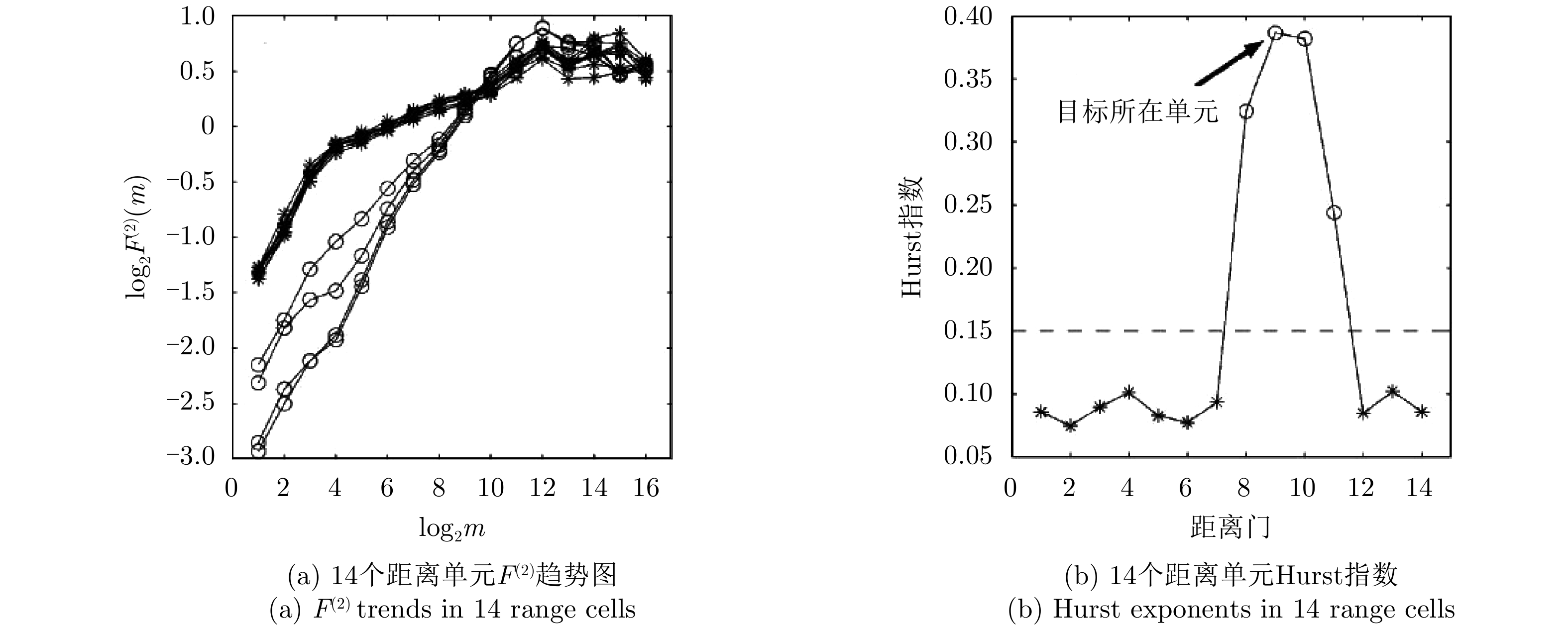
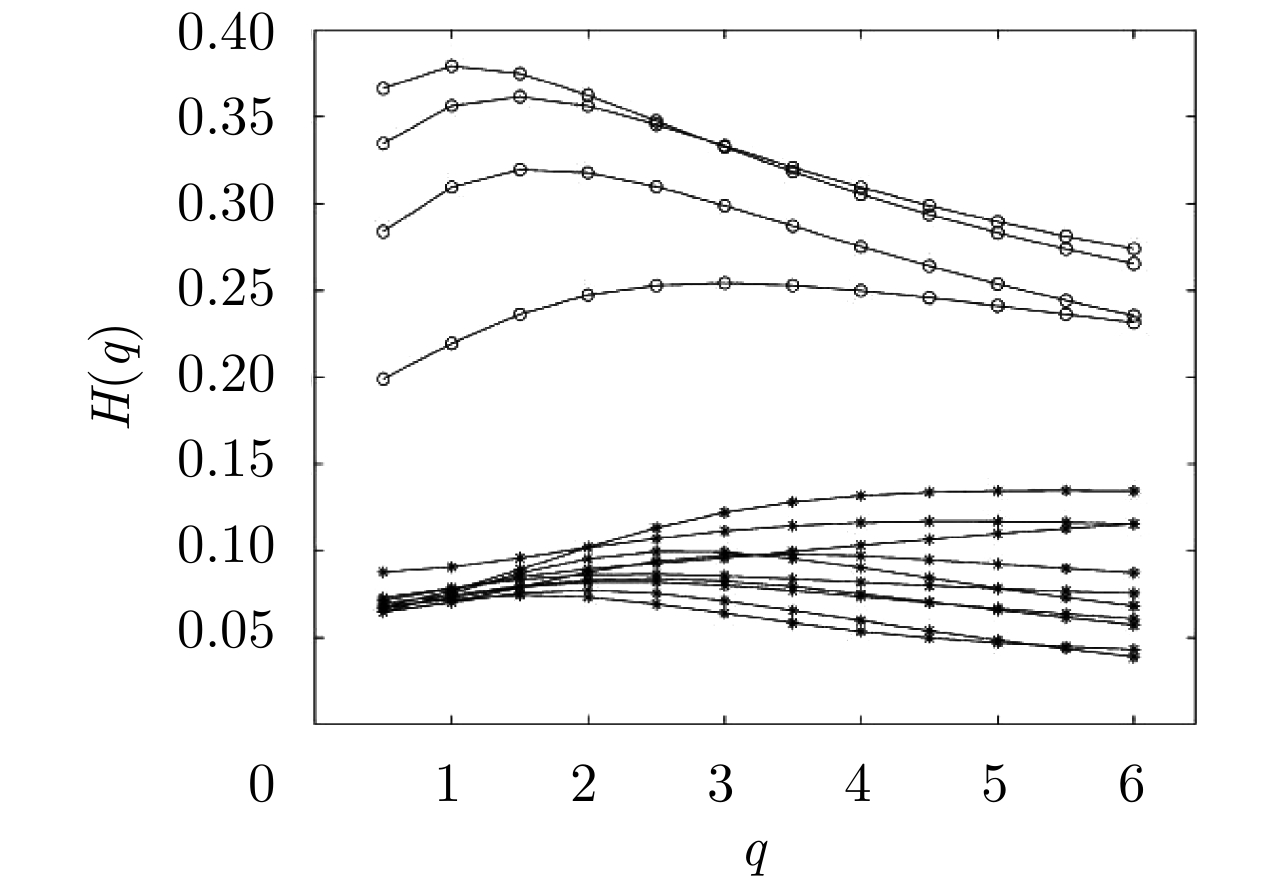
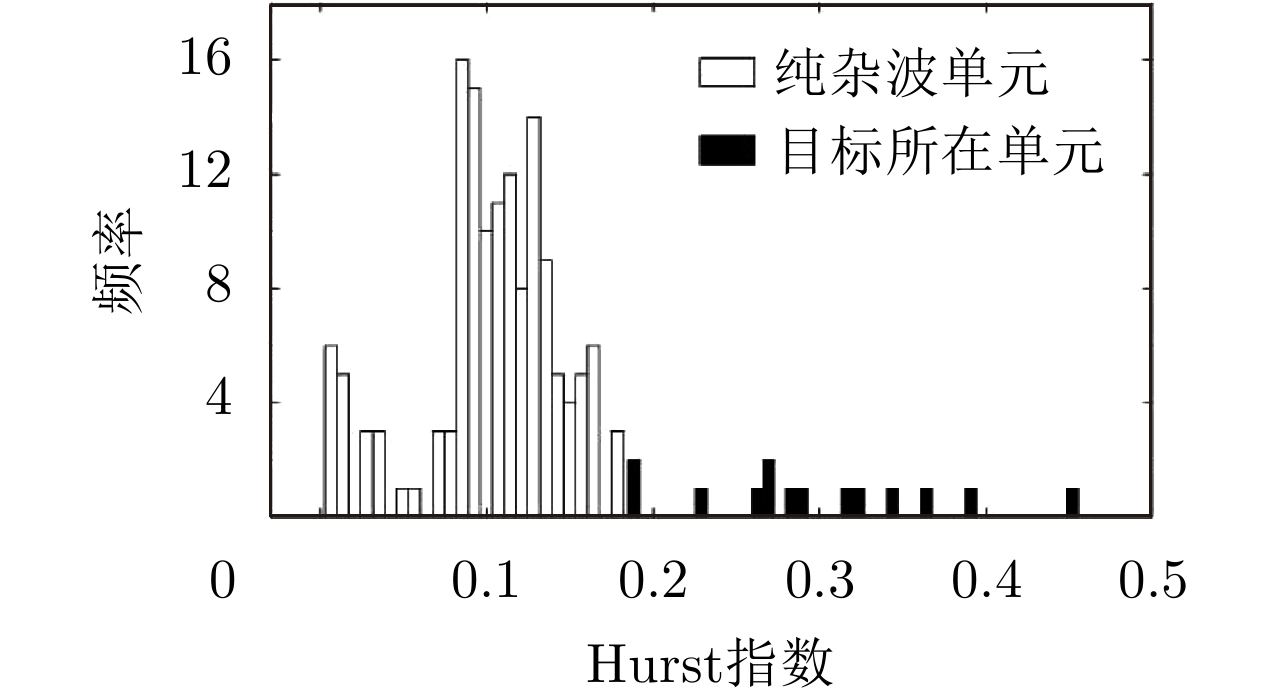
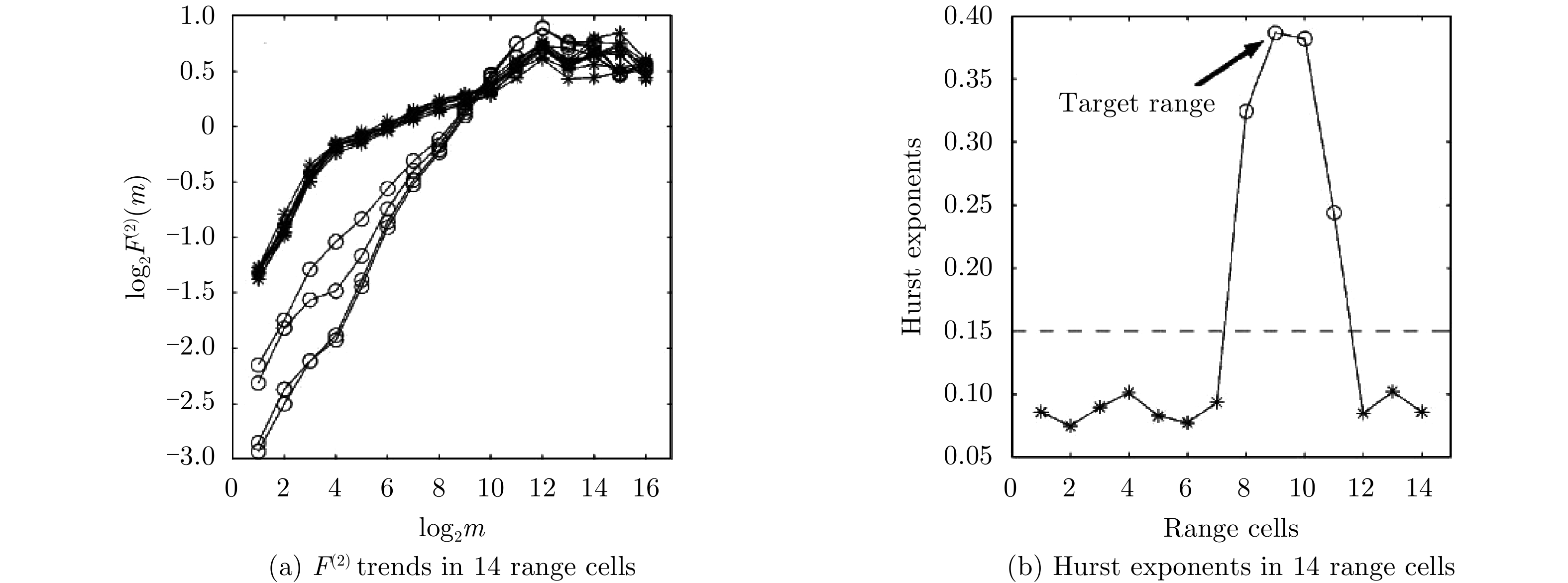
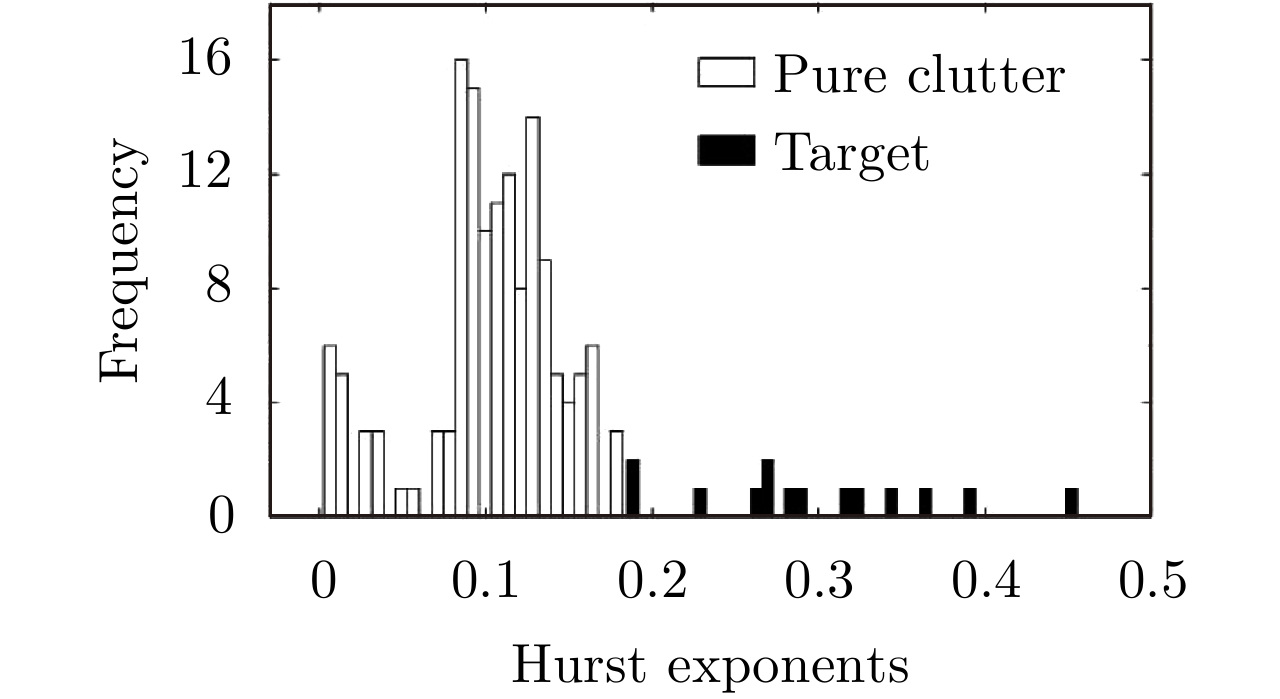
图 14 Hurst frequency distribution of clutter cells and target cells under HH polarization[30]

图 17 Distribution of training samples and test samples on the two-dimensional feature plane[73]

图 20 ROC curves of neural network-based detector and traditional Doppler CFAR detector[33]

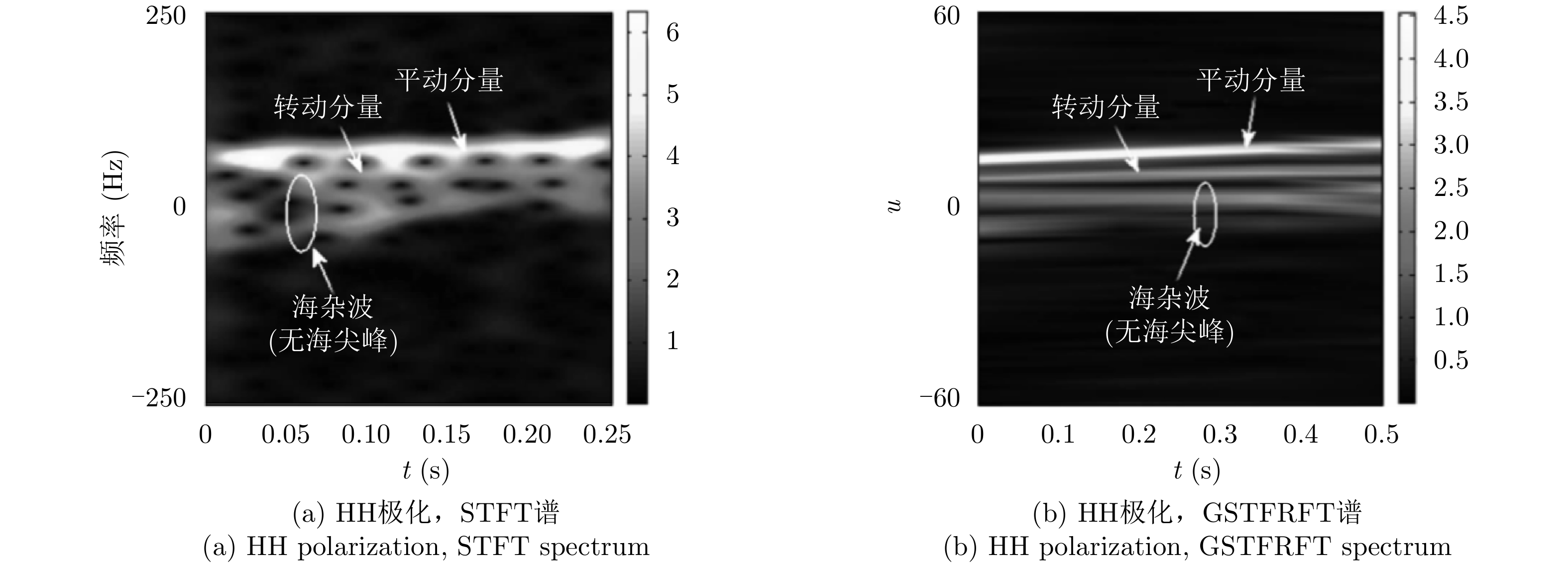
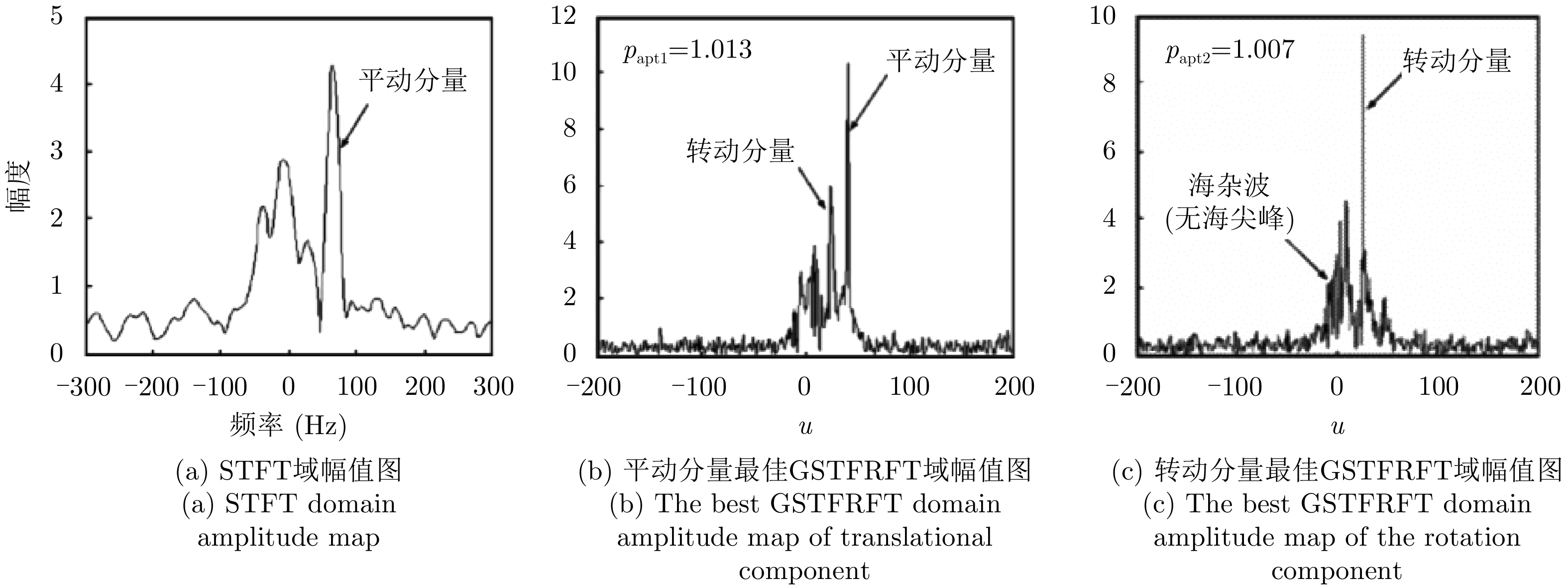
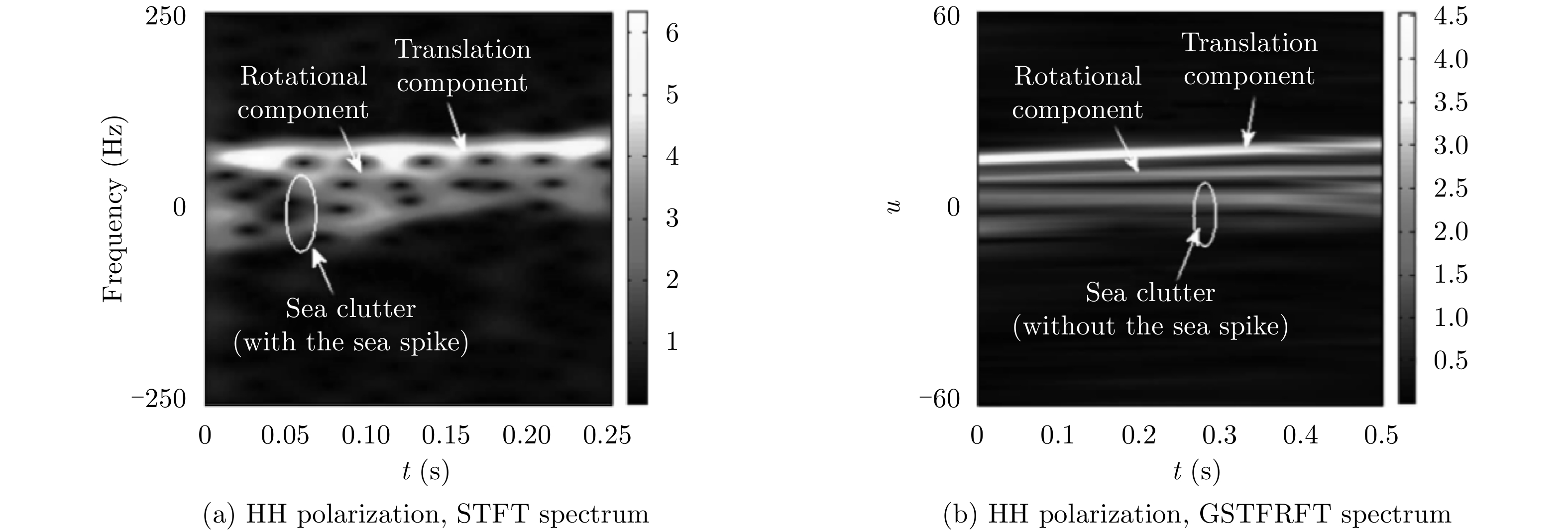
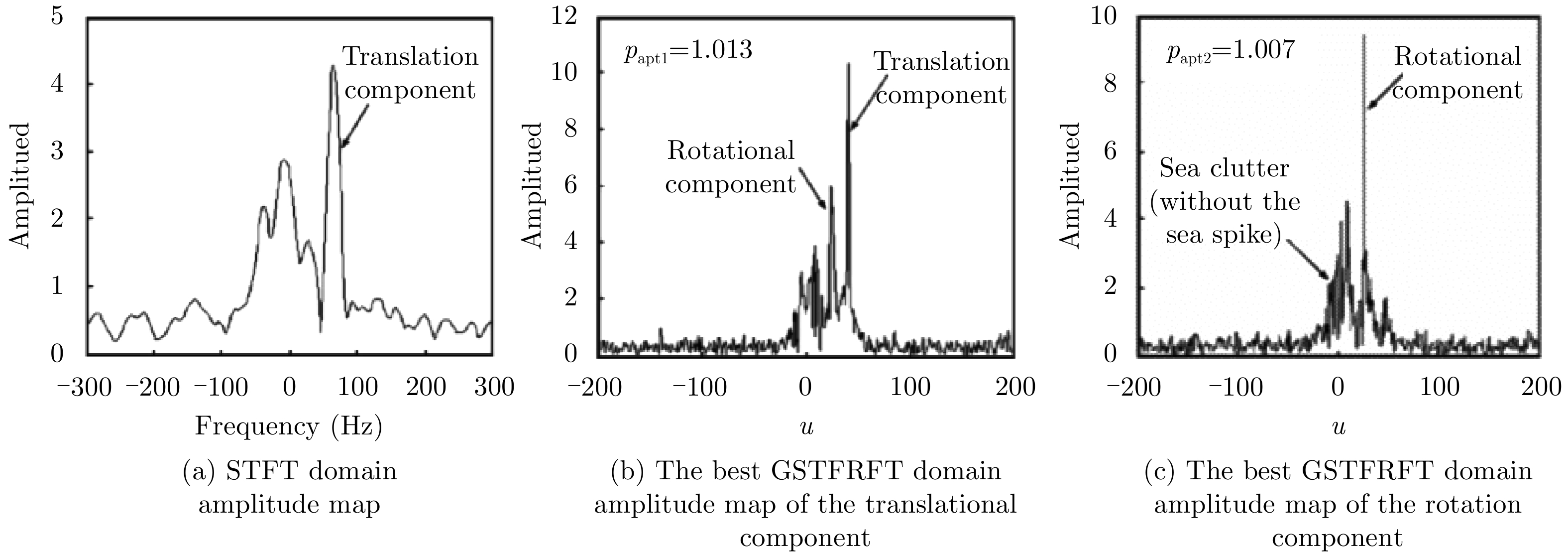
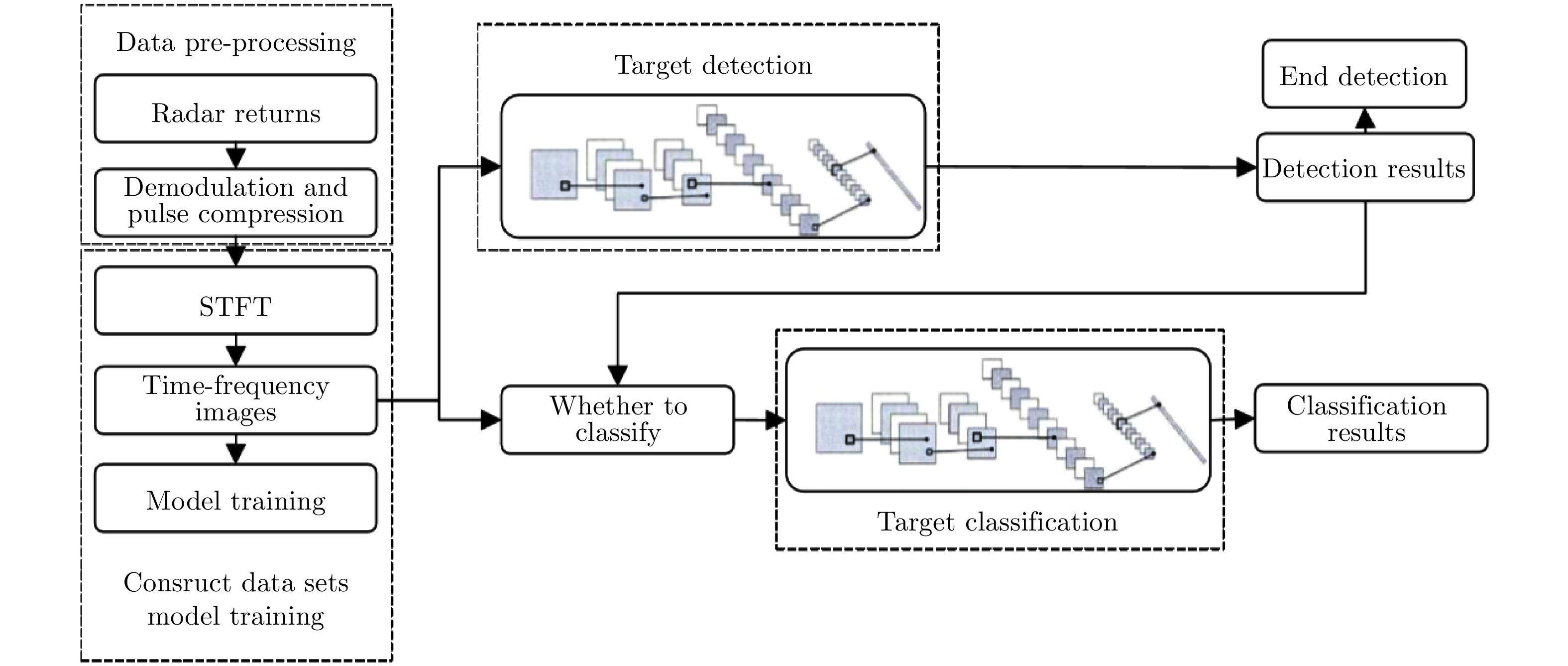
图 23 Comparison of micro-motion target detection results based on STFT and GSTFRFT after sea clutter suppression (N = 512)[41]

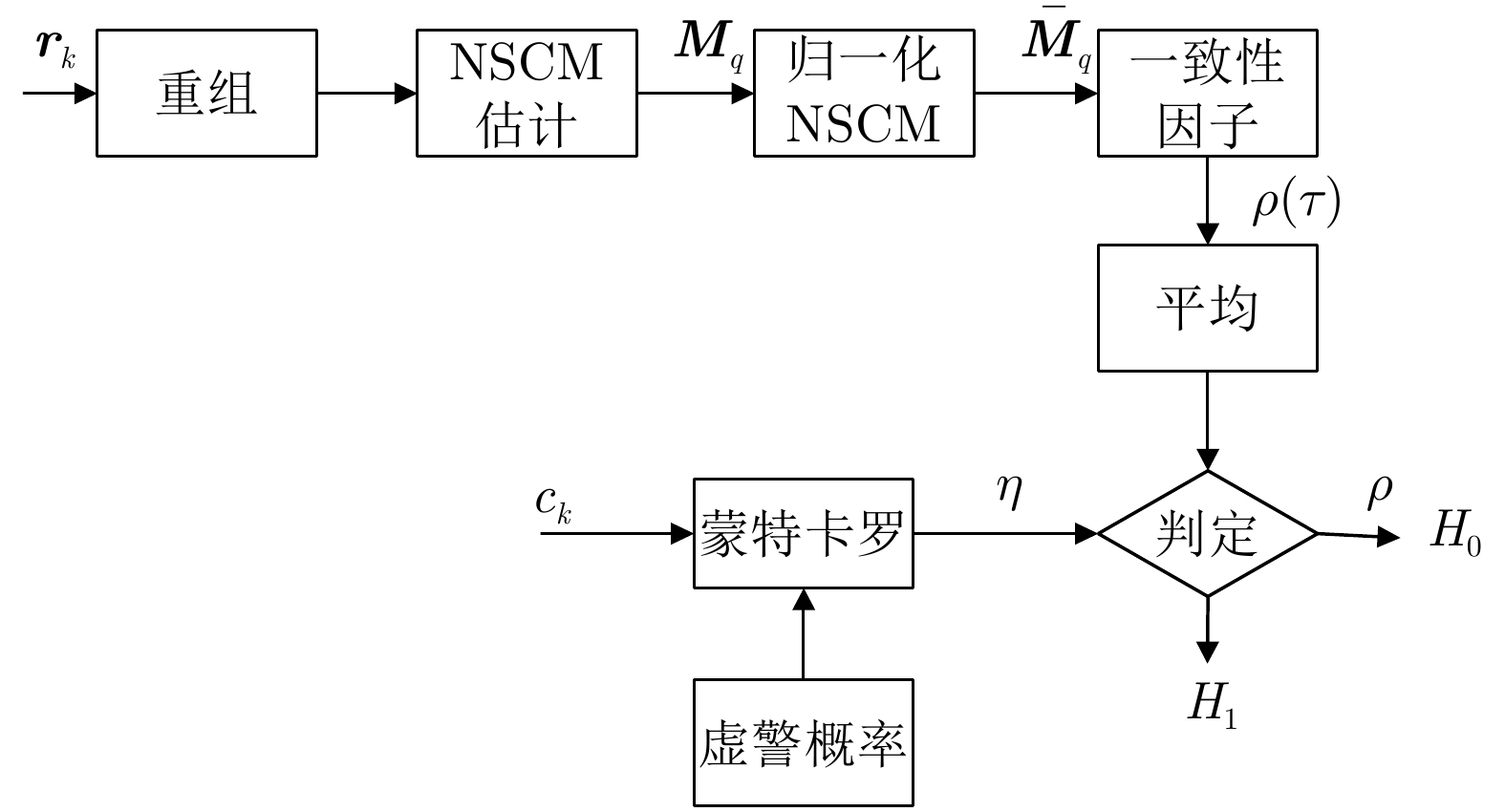
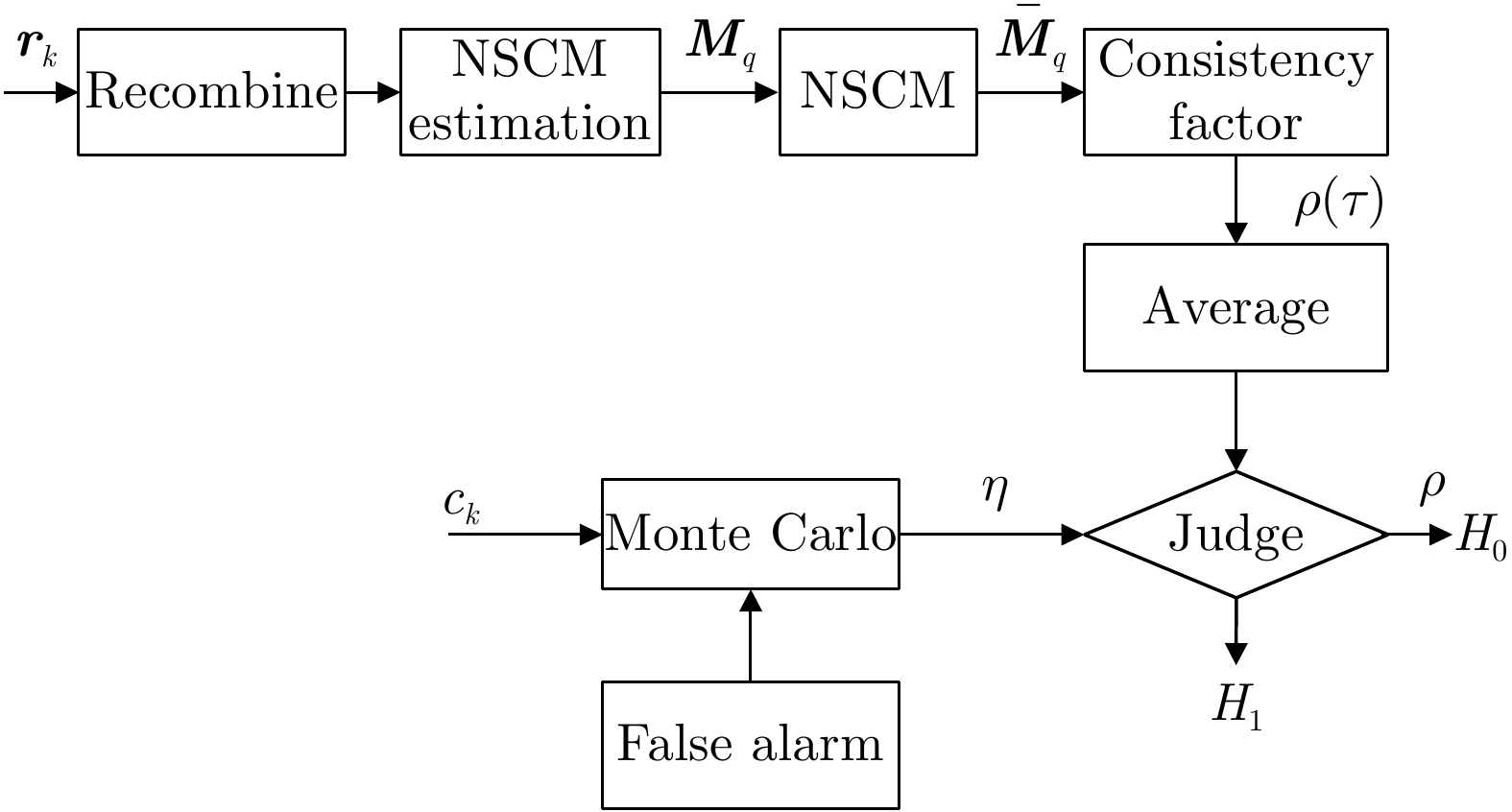
图 27 Flowchart of a feature-based detector using the average speckle consistency factor[74]

图 28 Average consistency factors of pure clutter and clutter with target under four polarization channels[74]

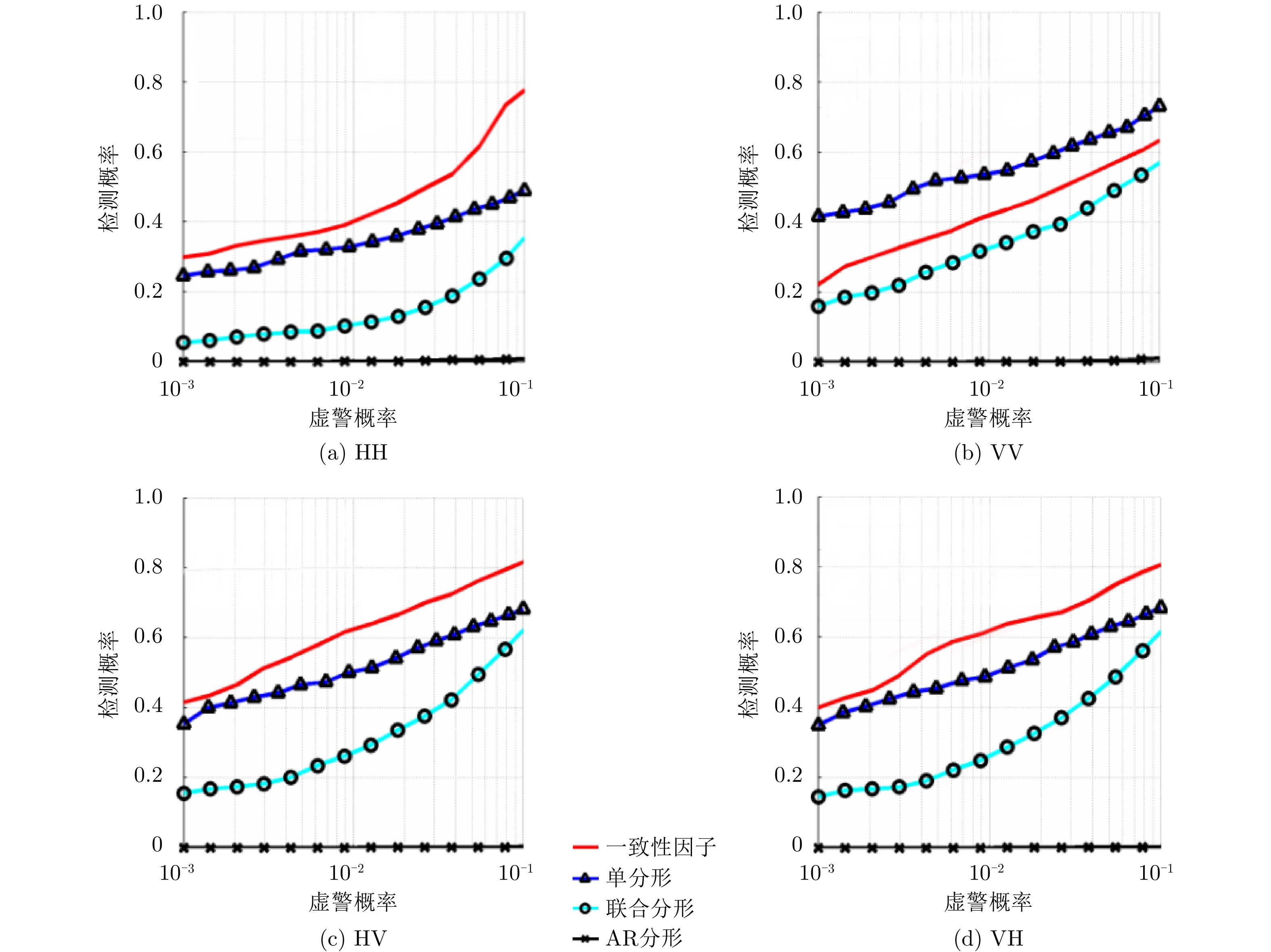
图 29 The detection probabilities of the four detectors under four polarization channels, L = 1024[74]

图 30 Distributions of features of clutter-only vectors and vectors with target in 3D feature space

图 31 Convex hull with the original training data and convex hull with given false alarm rate

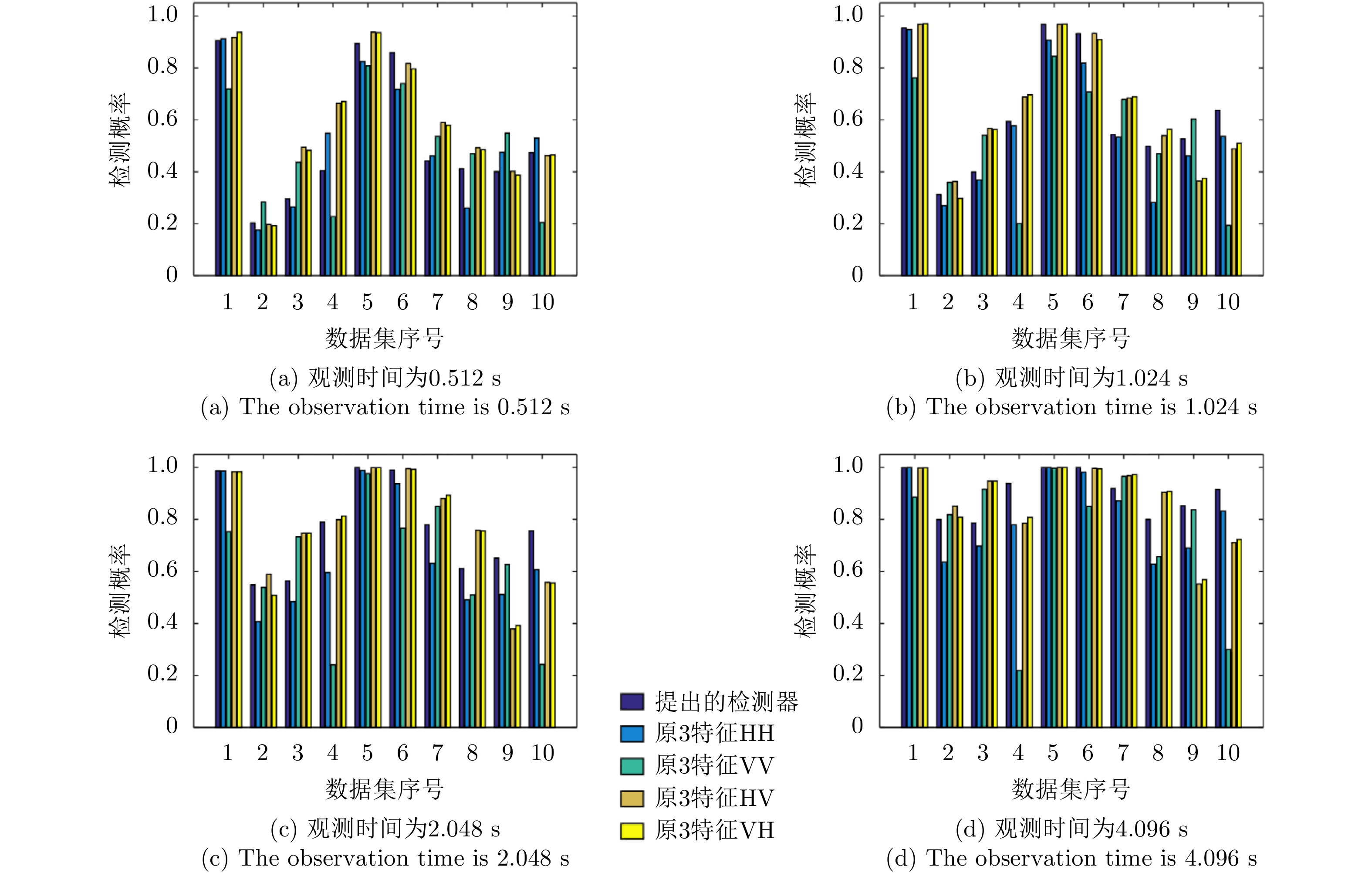
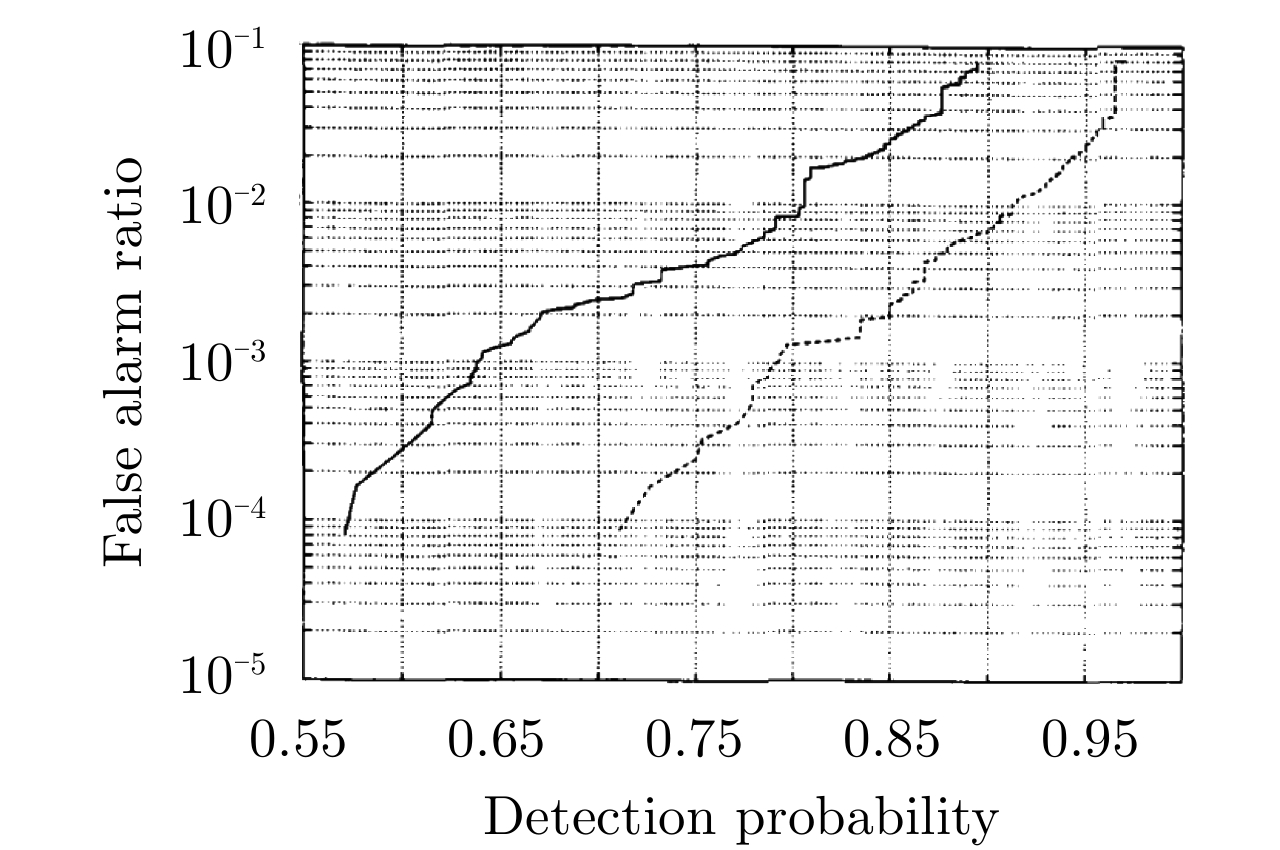
图 33 Detection probabilities of polarization feature-based detector and tri-detector at HH, VV, HV, and VH polarizations for 10 datasets[76]
数据名称Data name 浪高(m) Wave heights (m) 风速(km/h) Wind speed (km/h) 目标所在单元Primary 受影响单元Secondary #17 2.2 9 9 8, 10, 11 #26 1.1 9 7 6, 8 #30 0.9 19 7 6, 8 #31 0.9 19 7 6, 8, 9 #40 1.0 9 7 5, 6, 8 #54 0.7 20 8 7, 9, 10 #280 1.6 10 8 7, 10 #310 0.9 33 7 6, 8, 9 #311 0.9 33 7 6, 8, 9 #320 0.9 28 7 6, 8, 9  下载: 导出CSV
下载: 导出CSV
数据名称Data name 距离范围(m) Range(m) 目标所在单元Primary 受影响单元Secondary 雷达照射方向Radar direction #202225 3201~4011 24 23, 25 
#202525 3201~4011 7 6, 8  下载: 导出CSV
下载: 导出CSV
参数Parameter 数值Value 纬度Latitude 34°36'55.32"S 经度Longitude 20°17'20.11"E 地面高度Ground height 53 m 天线高度Antenna height 56 m 离海距离Distance to sea 1.2 km 方位角范围Azimuth coverage 208°~80° N (SSW-ENE) 距离Range (CNR > 15 dB) 1.25~4.50 km 擦地角Grazing angle (< 15 km) 3.00°~0.16° 擦地角Grazing angle (CNR > 15 dB) 3.0°~0.7°
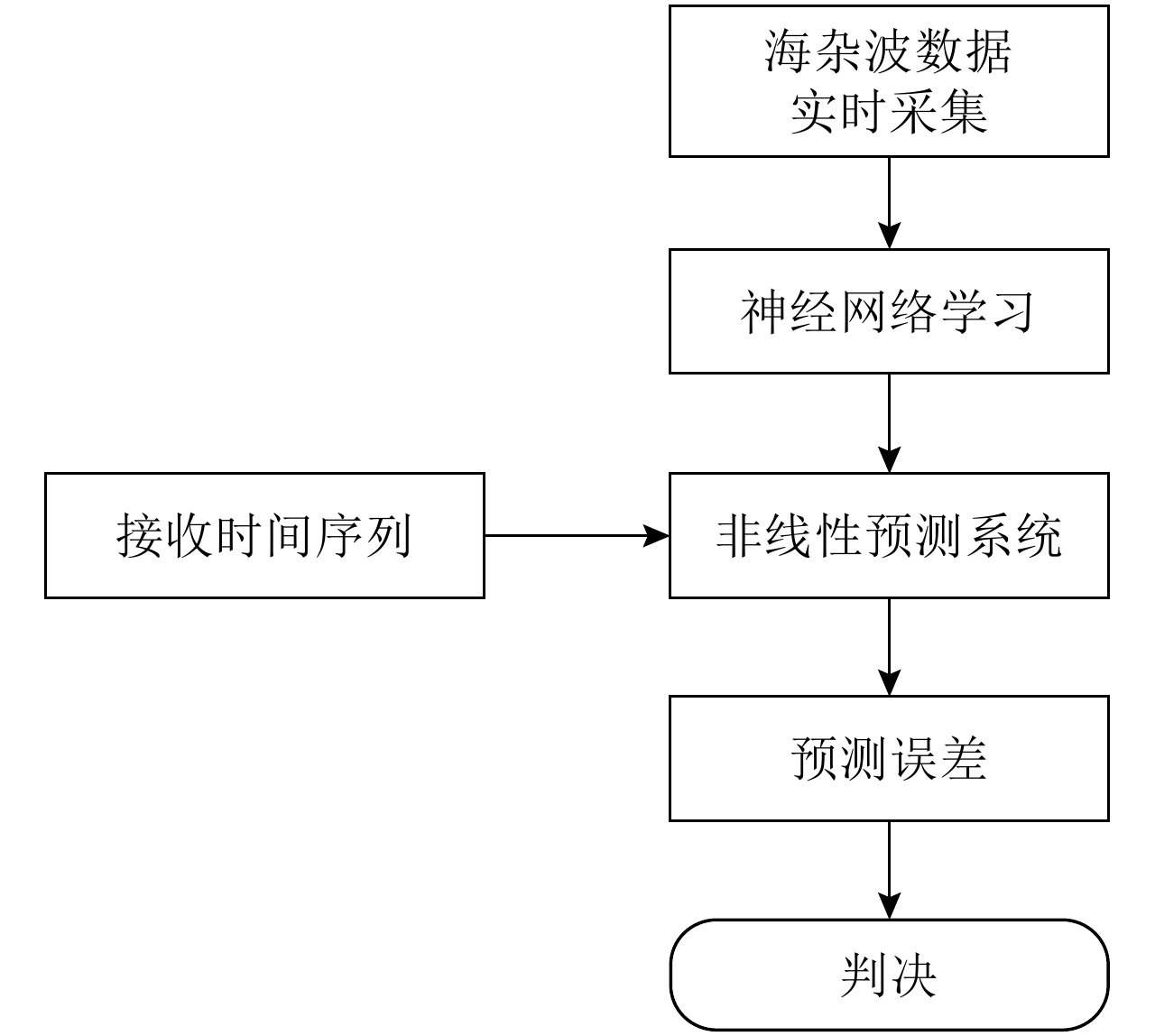
下载: 导出CSV
系统组成System composition 系统参数System parameters 参数设置Parameter values 发射机Transmitter 频率范围Frequency range 6.5~17.5 GHz 峰值功率Peak power 2 kW PRF范围PRF range 0~30 kHz 波形Waveforms 固定频率波形,步进频率波形,频率捷变波形Fixed frequency waveform, step frequency waveform, frequency agility waveform 捷变带宽Agile bandwidth 脉冲间500 MHz 500 MHz pulse to pulse 天线Antenna 类型Type 双偏移反射器Dual-offset reflector 增益Gain ≥ 30 dB 波束宽度Beamwidth ≤ 2° (3 dB波束宽度) ≤2° (3 dB beamwidth) 旁瓣Slidelobes ≤ –25 dB 接收机Receiver 动态范围Dynamic range 60 dB (瞬时) / 120 dB (总计) 60 dB (instantaneous)/120 dB (total) 灵敏度Sensitivity 0.1 m2 @ 10 km 仪表范围Instrumented range 200 m~15 km 距离门Range gates 1~64; ΔR = 100 ns, 300 ns or 400 ns 采样器类型Sampler type 中频采样器(IFS) Intermediate frequency sampler 编码类型Encoding type 正交编码Quadrature 镜像抑制Image rejection ≤ –41 dBc
下载: 导出CSV
雷达参数Radar parameters 参数设置Parameters setting 工作频段Working band X 工作频率范围Frequency range 9.3~9.5 GHz 量程Measuring range 0.0625~96 nm 扫描带宽Scanning bandwidth 25 MHz 距离分辨率Range resolution 6 m 脉冲重复频率Pulse repetition frequency 1.6 K, 3 K, 5 K和10 K 发射峰值功率Transmit peak power 50 W 天线转速Rotating speed of antenna 2 rpm, 12 rpm, 24 rpm, 48 rpm 天线长度Length of antenna 1.8 m 天线工作模式Antenna operation mode 凝视、圆周扫描Gaze, circular scanning 天线极化方式Antenna polarization HH 天线水平波束宽度Antenna horizontal beam width 1.2° 天线垂直波束宽度Antenna vertical beam width 22°
下载: 导出CSV
表 6 现有特征检测方法的特征
Table 6. Features introduction of feature-based detection method
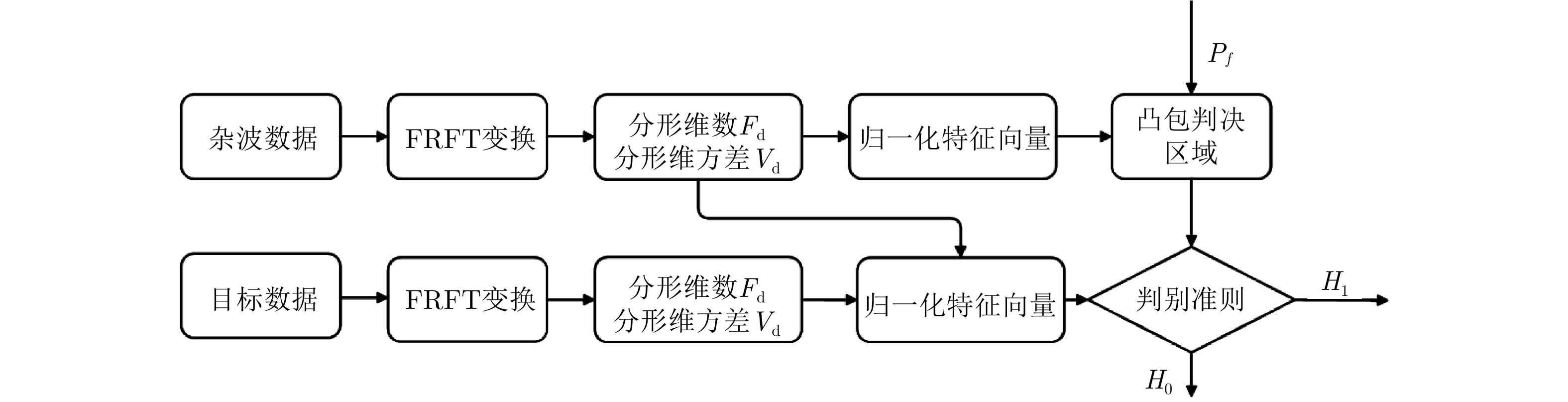
现有特征Existing features 分形特征Fractal features 单分形特征[29,31,67]、多重分形特征[30,68]、分数阶傅里叶变换域的分形特征[69-73] Single fractal features[29,31,67], multifractal features[30,68], fractal features in FRFT[69-73] 海杂波混沌特征Chaotic characteristics of sea clutter 关联维、Lyapunov指数以及Kolmogorov熵 Correlation dimension, Lyapunov exponent, and Kolmogorov entropy[33][33] 时域特征Features in the time domain 相对平均幅度[28]、时域的信息熵[77]、时域的Hurst指数[77]、散斑一致性因子特征[74] Relative average amplitude[28], temporal information entropy[77], temporal Hurst exponent[77], the speckle consistency factor[74] 频域特征Features in the frequency domain 相对多普勒峰高[28]、相对多普勒谱熵[28]、频谱峰值与均值之比[77]、频域Hurst指数[78] Relative Doppler peak height[28], relative vector-entropy[28], frequency peak-to-average ratio[77], Hurst exponent in frequency domain[78] 时频域特征Features in the time and frequency domains 微多普勒特征[41,42]、归一化时频分布的时频累积[75]、由归一化时频分布亮像素构成二值图像中的连通区域数目和最大连通区域的尺寸[75] Micro-Doppler features[41,42], the ridge integration of NTFD[75], the number of connected regions and the maximum size of connected regions in a binary image[75] 极化特征Polarization features 相对体散射机制对应能量[76]、相对二面角散射机制对应能量[76]和相对面散射机制对应能量[76] Relative surface scattering power[76], relative dihedral scattering power[76], and the relative volume scattering power[76]
下载: 导出CSV
表 7 不同方法海上微动目标检测性能对比[42]
Table 7. Detection performance of different methods of micro-motion model of maritime targets[42]
参数Parameter MTD FRFT WVD SPWVD ST-SFT ST-SFRFT Pd(%)(SCR=–5 dB) 39.26 57.26 35.68 55.24 49.21 71.35 Pd(%)(SCR=0 dB) 52.84 76.84 62.27 72.58 63.28 85.69
下载: 导出CSV
模型Model LeNet AlexNet GoogLeNet 虚警概率False alarm ratio 1.24 0.04 0.24 检测概率Detection probability 92.28 84.44 90.94
下载: 导出CSV
表 9 基于SVM的检测器与其余检测器的性能对比[77]
Table 9. Detection performance comparisons of SVM-based detector and the other detectors[77]
检测器Detectors 检测结果(HH极化,虚警概率为0.001) Detection results (HH polarization, PF = 0.001) SCR=–2 dB SCR=17 dB 基于SVM的检测器SVM-based detector 76 99 基于3特征的检测器Tri-feature-based detector 57 99 基于分形的检测器Fractal-based detector 18 79
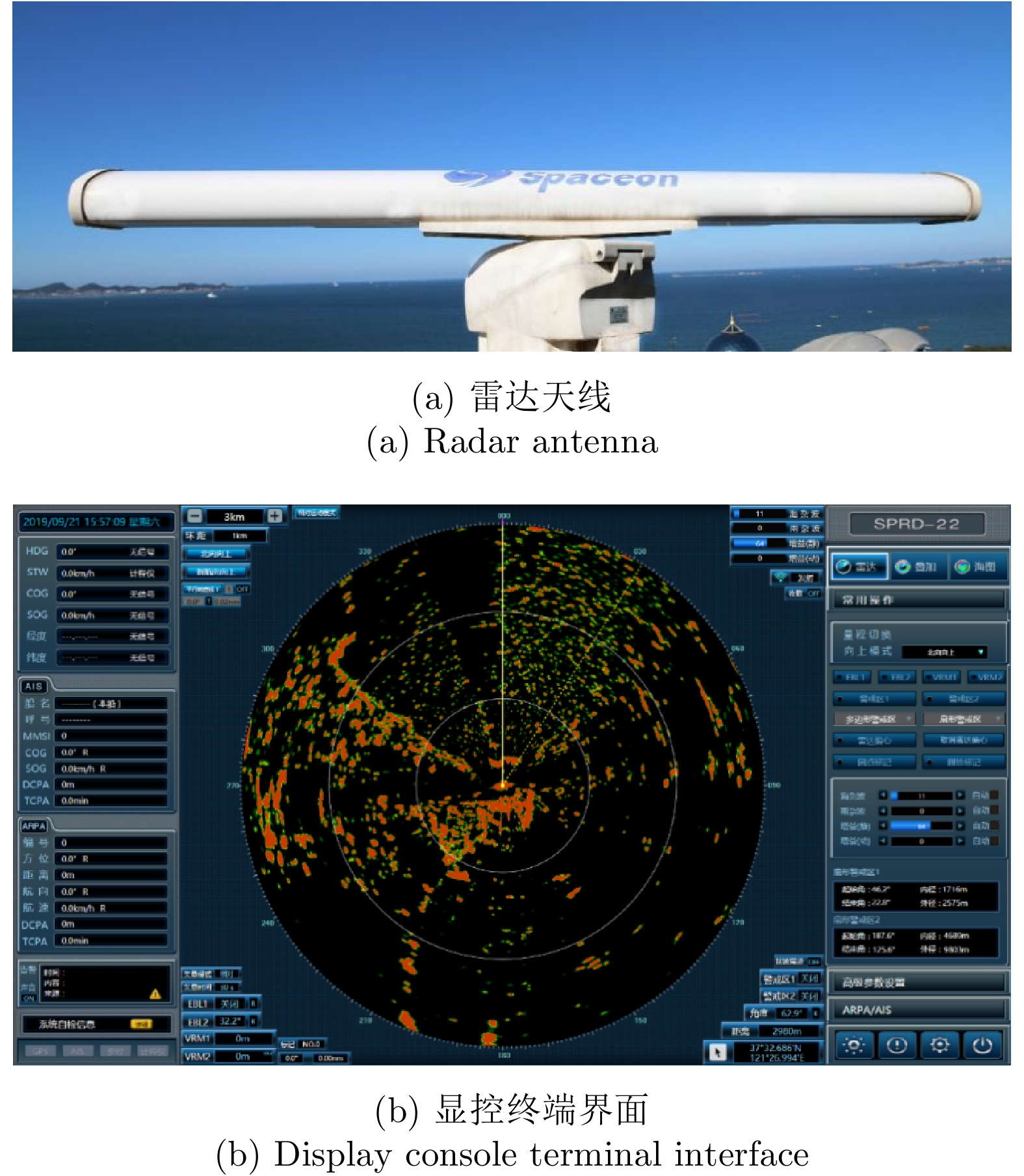
下载: 导出CSV
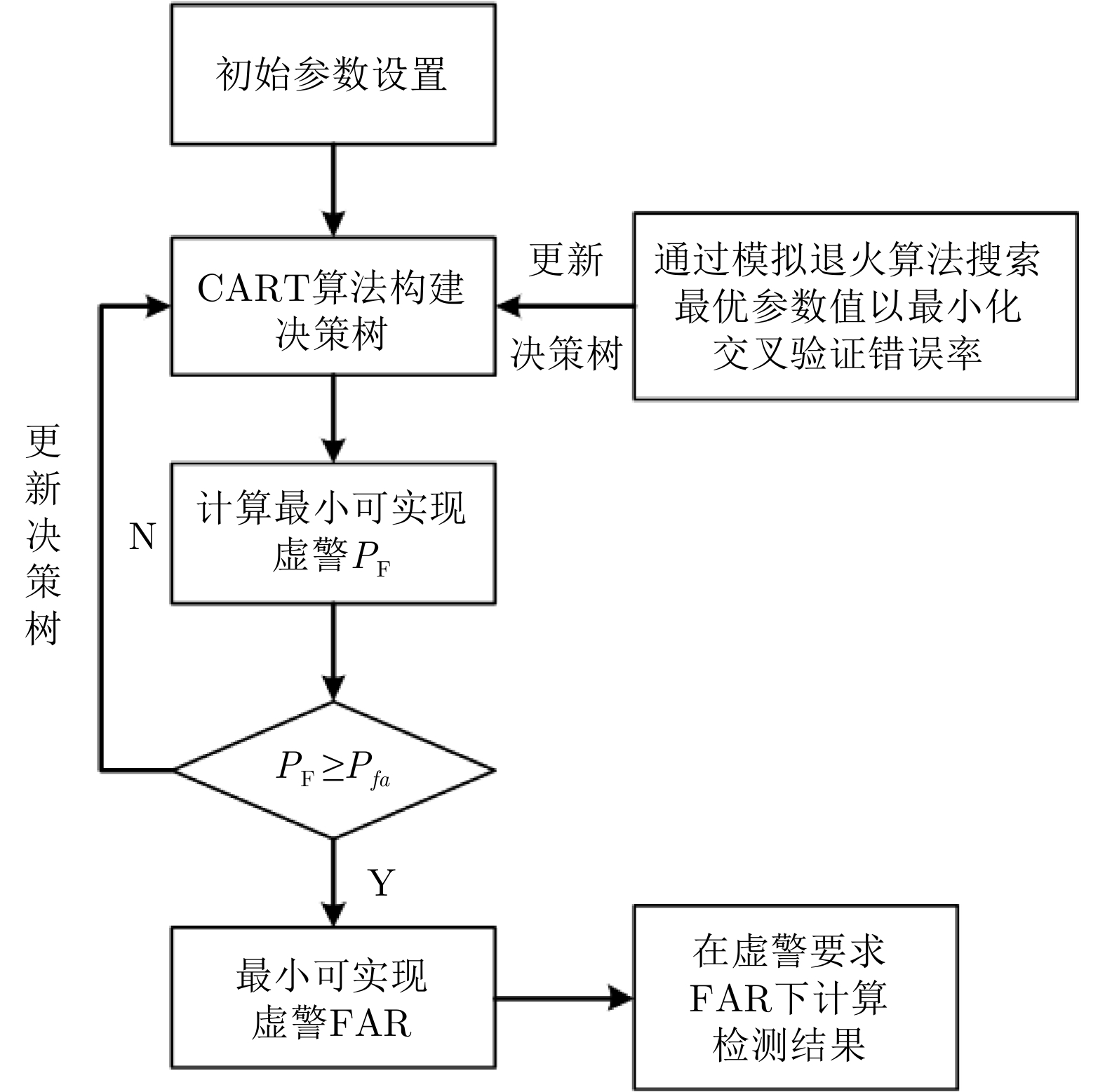
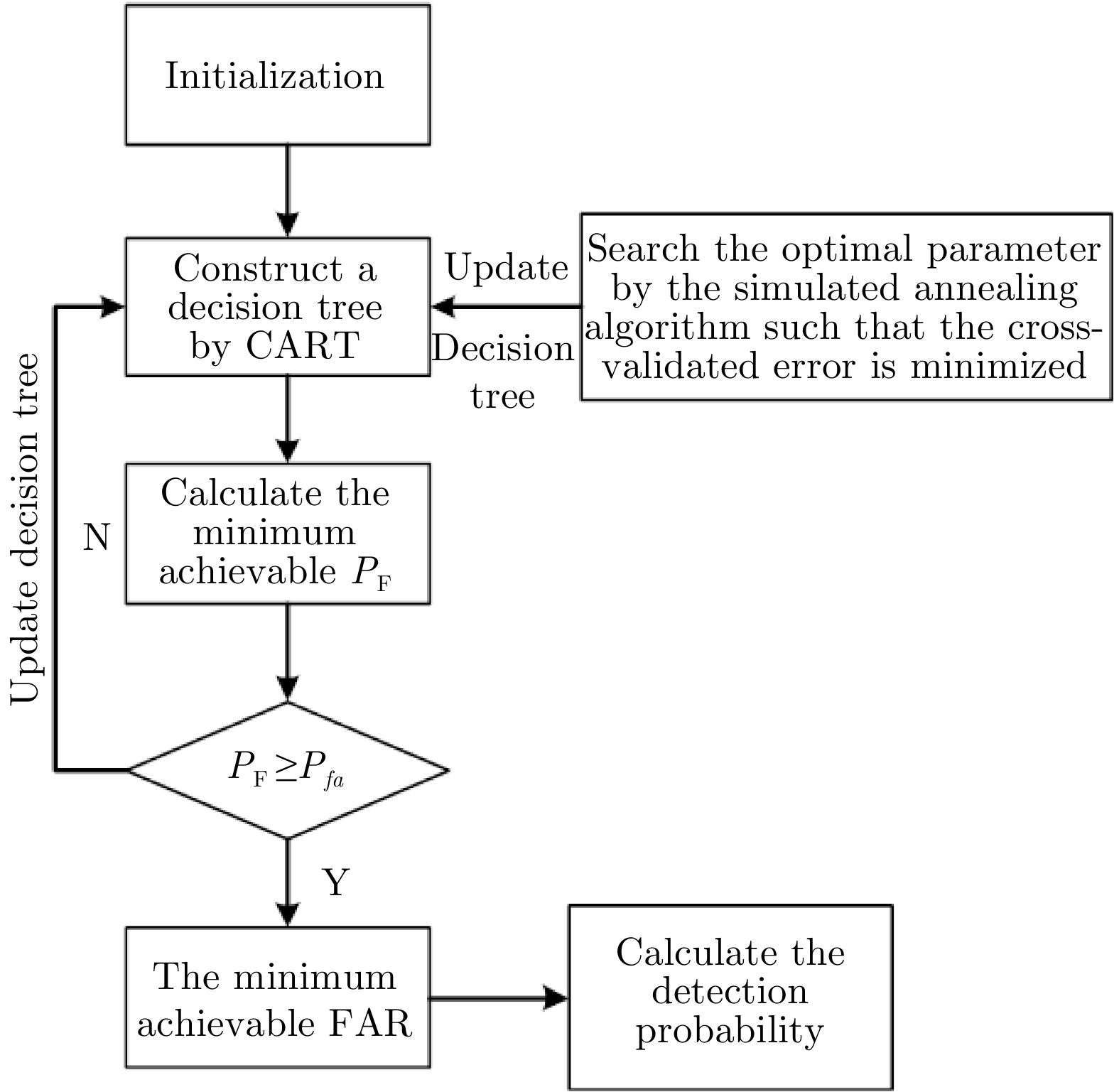
表 10 基于决策树的检测结果和其余检测器的性能对比[78]
Table 10. Detection performance comparisons of the decision tree-based detector and the other detectors[78]
检测器Detector 检测结果Detection 0 dB 5 dB 10 dB 15 dB 基于决策树的检测器Decision tree-based detector 0.76 0.84 0.98 0.99 基于3特征的检测器Tri-feature-based detector 0.58 0.65 0.82 0.95 基于分形的检测器Fractal-based detector 0.21 0.32 0.48 0.68
下载: 导出CSV
Data name Wave heights
(m)Wind speed
(km/h)Primary Secondary #17 2.2 9 9 8, 10, 11 #26 1.1 9 7 6, 8 #30 0.9 19 7 6, 8 #31 0.9 19 7 6, 8, 9 #40 1.0 9 7 5, 6, 8 #54 0.7 20 8 7, 9, 10 #280 1.6 10 8 7, 10 #310 0.9 33 7 6, 8, 9 #311 0.9 33 7 6, 8, 9 #320 0.9 28 7 6, 8, 9
下载: 导出CSV
Data name Range(m) Primary Secondary Radar direction #202225 3201~4011 24 23, 25
#202525 3201~4011 7 6, 8
下载: 导出CSV
表 3 Main characteristics of OTB MS3[11]
Parameter Value Latitude 34°36'55.32"S Longitude 20°17'20.11"E Ground height 53 m Antenna height 56 m Distance to sea 1.2 km Azimuth coverage 208°~80° N (SSW-ENE) Range (CNR > 15 dB) 1.25~4.50 km Grazing angle (<15 km) 3.00°~0.16° Grazing angle (CNR > 15 dB) 3.0°~0.7°
下载: 导出CSV
表 4 Fynmeet system and performance specifications[11]
System composition System parameters Parameter values Transmitter Frequency range 6.5~17.5 GHz Peak power 2 kW PRF range 0~30 kHz Waveforms Fixed frequency waveform, step frequency waveform, frequency agility waveform Agile bandwidth 500 MHz pulse to pulse Antenna Type Dual-offset reflector Gain ≥30 dB Beamwidth ≤2° (3 dB beamwidth) Slidelobes ≤–25 dB Receiver Dynamic range 60 dB (instantaneous)/120 dB (total) Sensitivity 0.1 m2 @ 10 km Instrumented range 200 m~15 km Range gates 1~64; ΔR = 100 ns, 300 ns or 400 ns Sampler type Intermediate frequency sampler Encoding type Quadrature Image rejection ≤–41 dBc
下载: 导出CSV
表 5 X-band radar parameters[51]
Radar parameters Parameters setting Working band X Frequency range 9.3~9.5 GHz Measuring range 0.0625~96 nm Scanning bandwidth 25 MHz Range resolution 6 m Pulse repetition frequency 1.6 K, 3 K, 5 K和10 K Transmit peak power 50 W Rotating speed of antenna 2 rpm, 12 rpm, 24 rpm, 48 rpm Length of antenna 1.8 m Antenna operation mode Gaze, circular scanning Antenna polarization HH Antenna horizontal beam width 1.2° Antenna vertical beam width 22° Information about the dataset and links to its download are available on the website of the Journal of Radar.
下载: 导出CSV
表 6 Features introduction of feature-based detection method
Existing features Fractal features Single fractal features[29,31,67], multifractal features[30,68], fractal features in FRFT[69-73] Chaotic characteristics of sea clutter Correlation dimension, Lyapunov exponent, and Kolmogorov entropy[33] Features in the time domain Relative average amplitude[28], temporal information entropy[77], temporal Hurst exponent[77], the speckle consistency factor[74] Features in the frequency domain Relative Doppler peak height[28], relative vector-entropy[28], frequency peak-to-average ratio[77], Hurst exponent in frequency domain[78] Features in the time and frequency domains Micro-Doppler features[41,42], the ridge integration of NTFD[75], the number of connected regions and the maximum size of connected regions in a binary image[75] Polarization features Relative surface scattering power[76], relative dihedral scattering power[76], and the relative volume scattering power[76]
下载: 导出CSV
表 7 Detection performances of different methods for the detection of micro-motion maritime targets[42]
Parameter MTD FRFT WVD SPWVD ST-SFT ST-SFRFT Pd(%) (SCR = –5 dB) 39.26 57.26 35.68 55.24 49.21 71.35 Pd(%) (SCR = 0 dB) 52.84 76.84 62.27 72.58 63.28 85.69
下载: 导出CSV
表 8 Detection results of different models(%)[43]
Model LeNet AlexNet GoogLeNet False alarm ratio 1.24 0.04 0.24 Detection probability 92.28 84.44 90.94
下载: 导出CSV
表 9 Detection performance comparison between SVM-based detector and other detectors[77]
Detectors Detection results
(HH polarization, PF = 0.001)SCR = –2 dB SCR=17 dB SVM-based detector 76 99 Tri-feature-based detector 57 99 Fractal-based detector 18 79
下载: 导出CSV
表 10 Detection performance comparisons between the decision tree-based detector and the other detectors[78]
Detector Detection results 0 dB 5 dB 10 dB 15 dB Decision tree-based detector 0.76 0.84 0.98 0.99 Tri-feature-based detector 0.58 0.65 0.82 0.95 Fractal-based detector 0.21 0.32 0.48 0.68
下载: 导出CSV
-
[1] FARINA A, GINI F, GRECO M V, et al. High resolution sea clutter data: Statistical analysis of recorded live data[J]. IEE Proceedings-Radar, Sonar and Navigation, 1997, 144(3): 121–130. doi: 10.1049/ip-rsn:19971107 [2] CONTE E, DE MAIO A, and GALDI C. Statistical analysis of real clutter at different range resolutions[J]. IEEE Transactions on Aerospace and Electronic Systems, 2004, 40(3): 903–918. doi: 10.1109/TAES.2004.1337463 [3] WARD K, TOUGH R, and WATTS S. Sea Clutter: Scattering, the K Distribution and Radar Performance[M]. 2nd ed. London: The Institution of Engineering and Technology, 2013. doi: 10.1049/PBRA025E. [4] CONTE E and DE MAIO A. Mitigation techniques for Non-Gaussian sea clutter[J]. IEEE Journal of Oceanic Engineering, 2004, 29(2): 284–302. doi: 10.1109/JOE.2004.826901 [5] WALKER D. Doppler modelling of radar sea clutter[J]. IEE Proceedings-Radar, Sonar and Navigation, 2001, 148(2): 73–80. doi: 10.1049/ip-rsn:20010182 [6] RAYNAL A M and DOERRY A W. Doppler characteristics of sea clutter[R]. SAND2010-3828, 2010. [7] TOPORKOV J V and SLETTEN M A. Statistical properties of low-grazing range-resolved sea surface backscatter generated through two-dimensional direct numerical simulations[J]. IEEE Transactions on Geoscience and Remote Sensing, 2007, 45(5): 1181–1197. doi: 10.1109/TGRS.2007.894442 [8] LIU Yong, FRASIER S J, and MCINTOSH R E. Measurement and classification of low-grazing-angle radar sea spikes[J]. IEEE Transactions on Antennas and Propagation, 1998, 46(1): 27–40. doi: 10.1109/8.655448 [9] GRECO M, STINCO P, and GINI F. Identification and analysis of sea radar clutter spikes[J]. IET Radar, Sonar & Navigation, 2010, 4(2): 239–250. doi: 10.1049/iet-rsn.2009.0088 [10] MELIEF H W, GREIDANUS H, VAN GENDEREN P, et al. Analysis of sea spikes in radar sea clutter data[J]. IEEE Transactions on Geoscience and Remote Sensing, 2006, 44(4): 985–993. doi: 10.1109/TGRS.2005.862497 [11] The Defence, Peace, Safety, and Security Unit of the Council for Scientific and Industrial Research. The Fynmeet radar database[EB/OL]. http://www.csir.co.ca/small_boat_detection. [12] 陈小龙, 关键, 黄勇, 等. 雷达低可观测目标探测技术[J]. 科技导报, 2017, 35(11): 30–38. doi: 10.3981/j.issn.1000-7857.2017.11.004CHEN Xiaolong, GUAN Jian, HUANG Yong, et al. Radar low-observable target detection[J]. Science &Technology Review, 2017, 35(11): 30–38. doi: 10.3981/j.issn.1000-7857.2017.11.004 [13] 陈小龙, 关键, 黄勇, 等. 雷达低可观测动目标精细化处理及应用[J]. 科技导报, 2017, 35(20): 19–27. doi: 10.3981/j.issn.1000-7857.2017.20.002CHEN Xiaolong, GUAN Jian, HUANG Yong, et al. Radar refined processing and its applications for low-observable moving target[J]. Science &Technology Review, 2017, 35(20): 19–27. doi: 10.3981/j.issn.1000-7857.2017.20.002 [14] WATTS S. Cell-averaging CFAR gain in spatially correlated K-distributed clutter[J]. IEE Proceedings-Radar, Sonar and Navigation, 1996, 143(5): 321–327. doi: 10.1049/ip-rsn:19960745 [15] 何友, 关键, 孟祥伟. 雷达目标检测与恒虚警处理[M]. 2版. 北京: 清华大学出版社, 2011.HE You, GUAN Jian, and MENG Xiangwei. Radar Target Detection and CFAR Processing[M]. 2nd ed. Beijing: Tsinghua University Press, 2011. [16] ZHOU Wei, XIE Junhao, LI Gaopeng, et al. Robust CFAR detector with weighted amplitude iteration in nonhomogeneous sea clutter[J]. IEEE Transactions on Aerospace and Electronic Systems, 2017, 53(3): 1520–1535. doi: 10.1109/TAES.2017.2671798 [17] KELLY E J. An adaptive detection algorithm[J]. IEEE Transactions on Aerospace and Electronic Systems, 1986, AES-22(2): 115–127. doi: 10.1109/TAES.1986.310745 [18] ROBEY F C, FUHRMANN D R, KELLY E J, et al. A CFAR adaptive matched filter detector[J]. IEEE Transactions on Aerospace and Electronic Systems, 1992, 28(1): 208–216. doi: 10.1109/7.135446 [19] GINI F and GRECO M. Texture modelling, estimation and validation using measured sea clutter data[J]. IEE Proceedings-Radar, Sonar and Navigation, 2002, 149(3): 115–124. doi: 10.1049/ip-rsn:20020272 [20] CONTE E, LOPS M, and RICCI G. Asymptotically optimum radar detection in compound-Gaussian clutter[J]. IEEE Transactions on Aerospace and Electronic Systems, 1995, 31(2): 617–625. doi: 10.1109/7.381910 [21] RICHMOND C D. Analysis of an adaptive detection algorithm for non-homogeneous environments[C]. The 1998 IEEE International Conference on Acoustics, Speech and Signal Processing, Seattle, USA, 1998: 2005–2008. [22] JAY E, OVARLEZ J P, DECLERCQ D, et al. BORD: Bayesian optimum radar detector[J]. Signal Processing, 2003, 83(6): 1151–1162. doi: 10.1016/S0165-1684(03)00034-3 [23] DONG Yunhan. Optimal coherent radar detection in a K-distributed clutter environment[J]. IET Radar, Sonar & Navigation, 2012, 6(5): 283–292. doi: 10.1049/iet-rsn.2011.0273 [24] SANGSTON K J, GINI F, and GRECO M S. Coherent radar target detection in heavy-tailed compound-Gaussian clutter[J]. IEEE Transactions on Aerospace and Electronic Systems, 2012, 48(1): 64–77. doi: 10.1109/TAES.2012.6129621 [25] SHANG X and SONG H. Radar detection based on Compound-Gaussian model with inverse gamma texture[J]. IET Radar, Sonar & Navigation, 2011, 5(3): 315–321. doi: 10.1049/iet-rsn.2010.0125 [26] XU Shuwen, XUE Jian, and SHUI Penglang. Adaptive detection of range-spread targets in compound Gaussian clutter with the square root of inverse Gaussian texture[J]. Digital Signal Processing, 2016, 56: 132–139. doi: 10.1016/j.dsp.2016.06.009 [27] SHUI Penglang, LIU Ming, and XU Shuwen. Shape-parameter-dependent coherent radar target detection in K-distributed clutter[J]. IEEE Transactions on Aerospace and Electronic Systems, 2016, 52(1): 451–465. doi: 10.1109/TAES.2015.140109 [28] SHUI Penglang, LI Dongchen, and XU Shuwen. Tri-feature-based detection of floating small targets in sea clutter[J]. IEEE Transactions on Aerospace and Electronic Systems, 2014, 50(2): 1416–1430. doi: 10.1109/TAES.2014.120657 [29] LO T, LEUNG H, LITVA J, et al. Fractal characterisation of sea-scattered signals and detection of sea-surface targets[J]. IEE Proceedings F-Radar and Signal Processing, 1993, 140(4): 243–250. doi: 10.1049/ip-f-2.1993.0034 [30] HU Jing, TUNG W W, and GAO Jianbo. Detection of low observable targets within sea clutter by structure function based multifractal analysis[J]. IEEE Transactions on Antennas and Propagation, 2006, 54(1): 136–143. doi: 10.1109/TAP.2005.861541 [31] GUAN Jian, LIU N B, HUANG Y, et al. Fractal characteristic in frequency domain for target detection within sea clutter[J]. IET Radar, Sonar & Navigation, 2012, 6(5): 293–306. doi: 10.1049/iet-rsn.2011.0250 [32] CHEN Xiaolong, GUAN Jian, HE You, et al. Detection of low observable moving target in sea clutter via fractal characteristics in fractional Fourier transform domain[J]. IET Radar, Sonar & Navigation, 2013, 7(6): 635–651. doi: 10.1049/iet-rsn.2012.0116 [33] HAYKIN S and LI Xiaobo. Detection of signals in chaos[J]. Proceedings of the IEEE, 1995, 83(1): 95–122. doi: 10.1109/5.362751 [34] HE Nan and HAYKIN S. Chaotic modelling of sea clutter[J]. Electronics Letters, 1992, 28(22): 2076–2077. doi: 10.1049/el:19921331 [35] HAYKIN S and THOMSON D J. Signal detection in a nonstationary environment reformulated as an adaptive pattern classification problem[J]. Proceedings of the IEEE, 1998, 86(11): 2325–2344. doi: 10.1109/5.726792 [36] DJUROVIĆ I and STANKOVIĆ L. An algorithm for the Wigner distribution based instantaneous frequency estimation in a high noise environment[J]. Signal Processing, 2004, 84(3): 631–643. doi: 10.1016/j.sigpro.2003.12.006 [37] HAYKIN S and BHATTACHARYA T K. Modular learning strategy for signal detection in a nonstationary environment[J]. IEEE Transactions on Signal Processing, 1997, 45(6): 1619–1637. doi: 10.1109/78.600003 [38] PANAGOPOULOS S and SORAGHAN J J. Small-target detection in sea clutter[J]. IEEE Transactions on Geoscience and Remote Sensing, 2004, 42(7): 1355–1361. doi: 10.1109/TGRS.2004.827259 [39] ZHANG Xiaowei, YANG Dongdong, GUO Jianxin, et al.. Weak moving target detection based on short-time fourier transform in sea clutter[C]. The IEEE 4th International Conference on Signal and Image Processing (ICSIP), Wuxi, China, 2019: 415–419. doi: 10.1109/SIPROCESS.2019.8868771. [40] CHEN Xiaolong, GUAN Jian, HUANG Yong, et al. Radon-linear canonical ambiguity function-based detection and estimation method for marine target with micromotion[J]. IEEE Transactions on Geoscience and Remote Sensing, 2015, 53(4): 2225–2240. doi: 10.1109/TGRS.2014.2358456 [41] 陈小龙, 刘宁波, 王国庆, 等. 基于高斯短时分数阶Fourier变换的海面微动目标检测方法[J]. 电子学报, 2014, 42(5): 971–977. doi: 10.3969/j.issn.0372-2112.2014.05.021CHEN Xiaolong, LIU Ningbo, WANG Guoqing, et al. Gaussian short-time fractional Fourier transform based detection algorithm of target with Micro-Motion at sea[J]. Acta Electronica Sinica, 2014, 42(5): 971–977. doi: 10.3969/j.issn.0372-2112.2014.05.021 [42] 陈小龙, 关键, 于晓涵, 等. 基于短时稀疏时频分布的雷达目标微动特征提取及检测方法[J]. 电子与信息学报, 2017, 39(5): 1017–1023. doi: 10.11999/JEIT161040CHEN Xiaolong, GUAN Jian, YU Xiaohan, et al. Radar Micro-Doppler signature extraction and detection via short-time sparse time-frequency distribution[J]. Journal of Electronics &Information Technology, 2017, 39(5): 1017–1023. doi: 10.11999/JEIT161040 [43] 苏宁远, 陈小龙, 关键, 等. 基于卷积神经网络的海上微动目标检测与分类方法[J]. 雷达学报, 2018, 7(5): 565–574. doi: 10.12000/JR18077SU Ningyuan, CHEN Xiaolong, GUAN Jian, et al. Detection and classification of maritime target with micro-motion based on CNNs[J]. Journal of Radars, 2018, 7(5): 565–574. doi: 10.12000/JR18077 [44] MOU Xiaoqian, CHEN Xiaolong, GUAN Jian, et al. Marine target detection based on improved faster R-CNN for navigation radar PPI images[C]. 2019 International Conference on Control, Automation and Information Sciences (ICCAIS), Chengdu, China, 2019: 1–5. doi: 10.1109/ICCAIS46528.2019.9074588. [45] LEUNG H, DUBASH N, and XIE Nan. Detection of small objects in clutter using a GA-RBF neural network[J]. IEEE Transactions on Aerospace and Electronic Systems, 2002, 38(1): 98–118. doi: 10.1109/7.993232 [46] METCALF J, BLUNT S D, and HIMED B. A machine learning approach to cognitive radar detection[C]. 2015 IEEE Radar Conference, Arlington, USA, 2015: 1405–1411. [47] CALLAGHAN D, BURGER J, and MISHRA A K. A machine learning approach to radar sea clutter suppression[C]. 2017 IEEE Radar Conference, Seattle, USA, 2017: 1222–1227. [48] MACHADO J R F and VIDAL J D L C B. Improved shape parameter estimation in K clutter with neural networks and deep learning[J]. International Journal of Interactive Multimedia and Artificial Intelligence, 2016, 3(7): 96–103. doi: 10.9781/ijimai.2016.3714 [49] DEL-REY-MAESTRE N, MATA-MOYA D, JARABO-AMORES M P, et al. Artificial intelligence techniques for small boats detection in radar clutter. Real data validation[J]. Engineering Applications of Artificial Intelligence, 2018, 67: 296–308. doi: 10.1016/j.engappai.2017.10.005 [50] The IPIX radar database[EB/OL]. http://soma.ece.mcmaster.ca/ipix/, 2001. [51] 刘宁波, 董云龙, 王国庆, 等. X波段雷达对海探测试验与数据获取[J]. 雷达学报, 2019, 8(5): 656–667. doi: 10.12000/JR19089LIU Ningbo, DONG Yunlong, WANG Guoqing, et al. Sea-detecting X-band radar and data acquisition program[J]. Journal of Radars, 2019, 8(5): 656–667. doi: 10.12000/JR19089 [52] ANTIPOV I. Analysis of sea clutter data[R]. Technical Report, DSTO-TR-0647, 1998. [53] DONG Yunhan and MERRETT D. Statistical measures of S-band sea clutter and targets[R]. Technical Report, DSTO-TR-2221, 2008. [54] DONG Yunhan and MERRETT D. Analysis of L-band multi-channel sea clutter[R]. Technical Report, DSTO-TR-2455, 2010. [55] DALEY J C, RANSONE J T, BURKETT J A, et al. Sea clutter measurements on four frequencies[R]. Naval Research Laboratory Report 6806, 1968. doi: 10.1109/7.993229. [56] CARRETERO-MOYA J, GISMERO-MENOYO J, BLANCO-DEL-CAMPO Á, et al. Statistical analysis of a high-resolution sea-clutter database[J]. IEEE Transactions on Geoscience and Remote Sensing, 2010, 48(4): 2024–2037. doi: 10.1109/TGRS.2009.2033193 [57] SIEGEL A, OCHADLICK A, DAVIS J, et al. Spatial and temporal correlation of LOGAN-1 high-resolution radar sea clutter data[C]. Proceedings of IGARSS’ 94-1994 IEEE International Geoscience and Remote Sensing Symposium, Pasadena, USA, 1994: 818–821. doi: 10.1109/IGARSS.1994.399273. [58] RINO C L, ECKERT E, SIEGEL A, et al. X-band low-grazing-angle ocean backscatter obtained during LOGAN 1993[J]. IEEE Journal of Oceanic Engineering, 1997, 22(1): 18–26. doi: 10.1109/48.557536 [59] HAIR T, LEE T, and BAKER C J. Statistical properties of multifrequency high-range-resolution sea reflections[J]. IEE Proceedings F-Radar and Signal Processing, 1991, 138(2): 75–79. doi: 10.1049/ip-f-2.1991.0012 [60] ISHII S, SAYAMA S, and MIZUTANI K. Effect of changes in sea-surface state on statistical characteristics of sea clutter with X-band radar[J]. Wireless Engineering and Technology, 2011, 2(3): 175–183. doi: 10.4236/wet.2011.23025 [61] FABBRO V, BIEGEL G, FÖRSTER J, et al. Measurements of sea clutter at low grazing angle in Mediterranean coastal environment[J]. IEEE Transactions on Geoscience and Remote Sensing, 2017, 55(11): 6379–6389. doi: 10.1109/TGRS.2017.2727057 [62] AL-ASHWAL W A, BAKER C J, BALLERI A, et al. Statistical analysis of simultaneous monostatic and bistatic sea clutter at low grazing angles[J]. Electronics Letters, 2011, 47(10): 621–622. doi: 10.1049/el.2011.0557 [63] AL-ASHWAL W A, WOODBRIDGE K, and GRIFFITHS H D. Analysis of bistatic sea clutter-Part I: Average reflectivity[J]. IEEE Transactions on Aerospace and Electronic Systems, 2014, 50(2): 1283–1292. doi: 10.1109/TAES.2014.120426 [64] AL-ASHWAL W A, WOODBRIDGE K, and GRIFFITHS H D. Analysis of bistatic sea clutter-Part II: Amplitude statistics[J]. IEEE Transactions on Aerospace and Electronic Systems, 2014, 50(2): 1293–1303. doi: 10.1109/TAES.2014.120434 [65] RITCHIE M, STOVE A, WOODBRIDGE K, et al. NetRAD: Monostatic and bistatic sea clutter texture and Doppler spectra characterization at S-Band[J]. IEEE Transactions on Geoscience and Remote Sensing, 2016, 54(9): 5533–5543. doi: 10.1109/TGRS.2016.2567598 [66] FIORANELLI F, RITCHIE M, GRIFFITHS H, et al. Analysis of polarimetric bistatic sea clutter using the NetRAD radar system[J]. IET Radar, Sonar & Navigation, 2016, 10(8): 1356–1366. doi: 10.1049/iet-rsn.2015.0416 [67] 刘宁波, 黄勇, 关键, 等. 实测海杂波频域分形特性分析[J]. 电子与信息学报, 2012, 34(4): 929–935. doi: 10.3724/SP.J.1146.2011.00856LIU Ningbo, HUANG Yong, GUAN Jian, et al. Fractal analysis of real sea clutter in frequency domain[J]. Journal of Electronics &Information Technology, 2012, 34(4): 929–935. doi: 10.3724/SP.J.1146.2011.00856 [68] GAO Jianbo and YAO K. Multifractal features of sea clutter[C]. The 2002 IEEE Radar Conference, Long Beach, USA, 2002: 500–505. [69] 刘宁波, 王国庆, 包中华, 等. 海杂波FRFT谱的多重分形特性与目标检测[J]. 信号处理, 2013, 29(1): 1–9. doi: 10.3969/j.issn.1003-0530.2013.01.001LIU Ningbo, WANG Guoqing, BAO Zhonghua, et al. Multifractal property of sea clutter FRFT spectrum for target detection[J]. Signal Processing, 2013, 29(1): 1–9. doi: 10.3969/j.issn.1003-0530.2013.01.001 [70] 顾智敏, 张兴敢, 王琼. FRFT域内的海杂波多重分形特性与目标检测[J]. 南京大学学报: 自然科学, 2017, 53(4): 731–737. doi: 10.13232/j.cnki.jnju.2017.04.016GU Zhimin, ZHANG Xinggan, and WANG Qiong. Multifractal property and target detection of sea clutter in FRFT domain[J]. Journal of Nanjing University:Natural Science, 2017, 53(4): 731–737. doi: 10.13232/j.cnki.jnju.2017.04.016 [71] 田玉芳, 姬光荣, 尹志盈, 等. 基于FRFT域空间分形特征差异的海面弱目标检测[J]. 中国海洋大学学报, 2013, 43(3): 92–97.TIAN Yufang, JI Guangrong, YIN Zhiying, et al. Weak targets detection in sea clutter based on modified fractal character differences[J]. Periodical of Ocean University of China, 2013, 43(3): 92–97. [72] 刘宁波, 关键, 王国庆, 等. 基于海杂波FRFT谱多尺度Hurst指数的目标检测方法[J]. 电子学报, 2013, 41(9): 1847–1853. doi: 10.3969/j.issn.0372-2112.2013.09.029LIU Ningbo, GUAN Jian, WANG Guoqing, et al. Target detection within sea clutter based on multi-scale Hurst exponent in FRFT domain[J]. Acta Electronica Sinica, 2013, 41(9): 1847–1853. doi: 10.3969/j.issn.0372-2112.2013.09.029 [73] SHI Yanling, ZHANG Xueliang, and LIU Zipeng. Floating small target detection in sea clutter based on jointed features in FRFT domain[C]. The 3rd EAI International Conference on Advanced Hybrid Information Processing, Nanjing, China, 2019: 128–139. doi: 10.1007/978-3-030-36405-2_14. [74] SHI Yanling, XIE Xiaoyan, and LI Dongchen. Range distributed floating target detection in sea clutter via feature-based detector[J]. IEEE Geoscience and Remote Sensing Letters, 2016, 13(12): 1847–1850. doi: 10.1109/LGRS.2016.2614750 [75] SHI Sainan and SHUI Penglang. Sea-surface floating small target detection by one-class classifier in time-frequency feature space[J]. IEEE Transactions on Geoscience and Remote Sensing, 2018, 56(11): 6395–6411. doi: 10.1109/TGRS.2018.2838260 [76] XU Shuwen, ZHENG Jibin, PU Jia, et al. Sea-surface floating small target detection based on polarization features[J]. IEEE Geoscience and Remote Sensing Letters, 2018, 15(10): 1505–1509. doi: 10.1109/LGRS.2018.2852560 [77] LI Yuzhou, XIE Pengcheng, TANG Zeshen, et al. SVM-based sea-surface small target detection: A false-alarm-rate-controllable approach[J]. IEEE Geoscience And Remote Sensing Letters, 2019, 16(8): 1225–1229. doi: 10.1109/LGRS.2019.2894385 [78] ZHOU Hongkun and JIANG Tao. Decision tree based sea-surface weak target detection with false alarm rate controllable[J]. IEEE Signal Processing Letters, 2019, 26(6): 793–797. doi: 10.1109/LSP.2019.2909584 [79] MANDELBROT B B. The Fractal Geometry of Nature[M]. San Francisco: Freeman, 1982. [80] MANDELBROT B B and VAN NESS J W. Fractional Brownian motions, fractional noises and applications[J]. SIAM Review, 1968, 10(4): 422–437. doi: 10.1137/1010093 [81] JAGGARD D L and SUN Xiaoguang. Scattering from fractally corrugated surfaces[J]. Journal of the Optical Society of America A, 1990, 7(6): 1131–1139. doi: 10.1364/JOSAA.7.001131 [82] SAVAIDIS S, FRANGOS P, JAGGARD D L, et al. Scattering from fractally corrugated surfaces: An exact approach[J]. Optics Letters, 1995, 20(23): 2357–2359. doi: 10.1364/OL.20.002357 [83] FRANCESCHETTI G, IODICE A, MIGLIACCIO M, et al. Scattering from natural rough surfaces modeled by fractional Brownian motion two-dimensional processes[J]. IEEE Transactions on Antennas and Propagation, 1999, 47(9): 1405–1415. doi: 10.1109/8.793320 [84] BERIZZI F and MESE E D. Fractal theory of sea scattering[C]. International Radar Conference, Beijing, China, 1996: 661–665. [85] BERIZZI F, GRECO M, and VERRAZZANI L. Fractal approach for sea clutter generation[J]. IEE Proceedings-Radar, Sonar and Navigation, 2000, 147(4): 189–198. doi: 10.1049/ip-rsn:20000465 [86] GUAN Jian, LIU Ningbo, ZHANG Jian, et al. Multifractal correlation characteristic for radar detecting low-observable target in sea clutter[J]. Signal Processing, 2010, 90(2): 523–535. doi: 10.1016/j.sigpro.2009.07.021 [87] 刘宁波, 关键, 宋杰. 扫描模式海杂波中目标的多重分形检测[J]. 雷达科学与技术, 2009, 7(4): 277–283. doi: 10.3969/j.issn.1672-2337.2009.04.008LIU Ningbo, GUAN Jian, and SONG Jie. Local Multifractal characteristic of sea clutter in radar scanning mode for target detection[J]. Radar Science and Technology, 2009, 7(4): 277–283. doi: 10.3969/j.issn.1672-2337.2009.04.008 [88] 关键, 刘宁波, 张建, 等. 海杂波的多重分形关联特性与微弱目标检测[J]. 电子与信息学报, 2010, 32(1): 54–61. doi: 10.3724/SP.J.1146.2008.00980GUAN Jian, LIU Ningbo, ZHANG Jian, et al. Multifractal correlation characteristic of real sea clutter and low-observable targets detection[J]. Journal of Electronics &Information Technology, 2010, 32(1): 54–61. doi: 10.3724/SP.J.1146.2008.00980 [89] LEUNG H and LO T. Chaotic radar signal processing over the sea[J]. IEEE Journal of Oceanic Engineering, 1993, 18(3): 287–295. doi: 10.1109/JOE.1993.236367 [90] HENNESSEY G, LEUNG H, DROSOPOULOS A, et al. Sea-clutter modeling using a radial-basis-function neural network[J]. IEEE Journal of Oceanic Engineering, 2001, 26(3): 358–372. doi: 10.1109/48.946510 [91] LEUNG H, HENNESSEY G, and DROSOPOULOS A. Signal detection using the radial basis function coupled map lattice[J]. IEEE Transactions on Neural Networks, 2000, 11(5): 1133–1151. doi: 10.1109/72.870045 [92] XIE Nan and LEUNG H. Reconstruction of piecewise chaotic dynamic using a genetic algorithm multiple model approach[J]. IEEE Transactions on Circuits and Systems I: Regular Papers, 2004, 51(6): 1210–1222. doi: 10.1109/TCSI.2004.826216 [93] XIE Nan, LEUNG H, and CHAN H. A multiple-model prediction approach for sea clutter modeling[J]. IEEE Transactions on Geoscience and Remote Sensing, 2003, 41(6): 1491–1502. doi: 10.1109/TGRS.2003.811690 [94] HAYKIN S, BAKKER R, and CURRIE B W. Uncovering nonlinear dynamics-the case study of sea clutter[J]. Proceedings of the IEEE, 2002, 90(5): 860–881. doi: 10.1109/JPROC.2002.1015011 [95] UNSWORTH C P, COWPER M R, MCLAUGHLIN S, et al. Re-examining the nature of radar sea clutter[J]. IEE Proceedings-Radar, Sonar and Navigation, 2002, 149(3): 105–114. doi: 10.1049/ip-rsn:20020301 [96] GAO J B, HWANG S K, CHEN H F, et al. Can sea clutter and indoor radio propagation be modeled as strange attractors?[C]. The 7th Experimental Chaos Conference, Melville, Canada, 2003: 25–29. [97] MCDONALD M and DAMINI A. Limitations of nonlinear chaotic dynamics in predicting sea clutter returns[J]. IEE Proceedings-Radar, Sonar and Navigation, 2004, 151(2): 105–113. doi: 10.1049/ip-rsn:20040261 [98] 王俊, 郑彤, 雷鹏, 等. 深度学习在雷达中的研究综述[J]. 雷达学报, 2018, 7(4): 395–411. doi: 10.12000/JR18040WANG Jun, ZHENG Tong, LEI Peng, et al. Study on deep learning in radar[J]. Journal of Radars, 2018, 7(4): 395–411. doi: 10.12000/JR18040 [99] WOOD J C and BARRY D T. Linear signal synthesis using the Radon-Wigner transform[J]. IEEE Transactions on Signal Processing, 1994, 42(8): 2105–2111. doi: 10.1109/78.301845 [100] WOOD J C and BARRY D T. Radon transformation of time-frequency distributions for analysis of multicomponent signals[J]. IEEE Transactions on Signal Processing, 1994, 42(11): 3166–3177. doi: 10.1109/78.330375 [101] WANG Minsheng, CHAN A K, and CHUI C K. Linear frequency-modulated signal detection using Radon-ambiguity transform[J]. IEEE Transactions on Signal Processing, 1998, 46(3): 571–586. doi: 10.1109/78.661326 [102] MANN S and HAYKIN S. The chirplet transform: Physical considerations[J]. IEEE Transactions on Signal Processing, 1995, 43(11): 2745–2761. doi: 10.1109/78.482123 [103] SHUI Penglang, BAO Zheng, and SU Hongtao. Nonparametric detection of FM signals using time-frequency ridge energy[J]. IEEE Transactions on Signal Processing, 2008, 56(5): 1749–1760. doi: 10.1109/TSP.2007.909322 [104] 王世庆, 金亚秋. SAR图像船行尾迹检测的Radon变换和形态学图像处理技术[J]. 遥感学报, 2001, 5(4): 289–294. doi: 10.3321/j.issn:1007-4619.2001.04.008WANG Shiqing and JIN Yaqiu. Ship wake detection in SAR images based on radon transformation and morphologic image processing[J]. Journal of Remote Sensing, 2001, 5(4): 289–294. doi: 10.3321/j.issn:1007-4619.2001.04.008 [105] 汤子跃, 朱敏慧, 王卫延. 一种SAR图象舰船尾迹的CFAR检测方法[J]. 电子学报, 2002, 30(9): 1336–1339. doi: 10.3321/j.issn:0372-2112.2002.09.022TANG Ziyue, ZHU Minhui, and WANG Weiyan. A CFAR detection method of ship wakes in SAR images[J]. Acta Electronica Sinica, 2002, 30(9): 1336–1339. doi: 10.3321/j.issn:0372-2112.2002.09.022 [106] 关键, 李宝, 刘加能, 等. 两种海杂波背景下的微弱匀加速运动目标检测方法[J]. 电子与信息学报, 2009, 31(8): 1898–1902. doi: 10.3724/SP.J.1146.2008.01023GUAN Jian, LI Bao, LIU Jianeng, et al. Two approaches of detecting weak moving target with constant acceleration in sea clutter[J]. Journal of Electronics &Information Technology, 2009, 31(8): 1898–1902. doi: 10.3724/SP.J.1146.2008.01023 [107] CARRETERO-MOYA J, GISMERO-MENOYO J, ASENSIO-LOPEZ A, et al. Application of the radon transform to detect small-targets in sea clutter[J]. IET Radar, Sonar & Navigation, 2009, 3(2): 155–166. doi: 10.1049/iet-rsn:20080123 [108] 刘建成, 王雪松, 刘忠, 等. 基于Wigner-Hough变换的LFM信号检测性能分析[J]. 电子学报, 2007, 35(6): 1212–1217. doi: 10.3321/j.issn:0372-2112.2007.06.041LIU Jiancheng, WANG Xuesong, LIU Zhong, et al. Detection performance of linear frequency modulated signals based on Wigner-Hough transform[J]. Acta Electronica Sinica, 2007, 35(6): 1212–1217. doi: 10.3321/j.issn:0372-2112.2007.06.041 [109] ZHANG Yu, QIAN S, and THAYAPARAN T. Detection of a manoeuvring air target in strong sea clutter via joint time-frequency representation[J]. IET Signal Processing, 2008, 2(3): 216–222. doi: 10.1049/iet-spr:20070047 [110] SHUI Penglang, LIU Hongwei, and BAO Zheng. Range-spread target detection based on cross time-frequency distribution features of two adjacent received signals[J]. IEEE Transactions on Signal Processing, 2009, 57(10): 3733–3745. doi: 10.1109/TSP.2009.2029715 [111] 左磊, 李明, 张晓伟, 等. 基于改进Hough变换的海面微弱目标检测[J]. 电子与信息学报, 2012, 34(4): 923–928. doi: 10.3724/SP.J.1146.2011.00373ZUO Lei, LI Ming, ZHANG Xiaowei, et al. Small-target detection in sea clutter based on improved Hough transform[J]. Journal of Electronics &Information Technology, 2012, 34(4): 923–928. doi: 10.3724/SP.J.1146.2011.00373 [112] ZUO Lei, LI Ming, ZHANG Xiaowei, et al. An efficient method for detecting slow-moving weak targets in sea clutter based on time-frequency iteration decomposition[J]. IEEE Transactions on Geoscience and Remote Sensing, 2013, 51(6): 3659–3672. doi: 10.1109/TGRS.2012.2224665 [113] ZUO Lei, LI Ming, ZHANG Xiaowei, et al. CFAR detection of range-spread targets based on the time-frequency decomposition feature of two adjacent returned signals[J]. IEEE Transactions on Signal Processing, 2013, 61(24): 6307–6319. doi: 10.1109/TSP.2013.2282274 [114] CHEN Xiaolong, HUANG Yong, GUAN Jian, et al.. Sea clutter suppression and moving target detection method based on clutter map cancellation in FRFT domain[C]. Proceedings of 2011 IEEE CIE International Conference on Radar, Chengdu, China, 2011: 438–441. doi: 10.1109/CIE-Radar.2011.6159571. [115] GUAN Jian, CHEN Xiaolong, HUANG Y, et al. Adaptive fractional Fourier transform-based detection algorithm for moving target in heavy sea clutter[J]. IET Radar, Sonar & Navigation, 2012, 6(5): 389–401. [116] CHEN Xiaolong, GUAN Jian, BAO Zhonghua, et al. Detection and extraction of target with micromotion in spiky sea clutter via short-time fractional Fourier transform[J]. IEEE Transactions on Geoscience and Remote Sensing, 2014, 52(2): 1002–1018. doi: 10.1109/TGRS.2013.2246574 [117] JANGAL F, SAILLANT S, and HELIER M. Wavelet contribution to remote sensing of the sea and target detection for a high-frequency surface wave radar[J]. IEEE Geoscience and Remote Sensing Letters, 2008, 5(3): 552–556. doi: 10.1109/LGRS.2008.923211 [118] 陈小龙, 董云龙, 李秀友, 等. 海面刚体目标微动特征建模及特性分析[J]. 雷达学报, 2015, 4(6): 630–638. doi: 10.12000/JR15079CHEN Xiaolong, DONG Yunlong, LI Xiuyou, et al. Modeling of micromotion and analysis of properties of rigid marine targets[J]. Journal of Radars, 2015, 4(6): 630–638. doi: 10.12000/JR15079 [119] POSNER F L. Spiky sea clutter at high range resolutions and very low grazing angles[J]. IEEE Transactions on Aerospace and Electronic Systems, 2002, 38(1): 58–73. doi: 10.1109/7.993229 [120] WANG Pu, LI Hongbin, DJUROVIC I, et al. Integrated cubic phase function for linear FM signal analysis[J]. IEEE Transactions on Aerospace and Electronic Systems, 2010, 46(3): 963–977. doi: 10.1109/TAES.2010.5545167 [121] BI Guoan, LI Xiumei, and SEE C M S. LFM signal detection using LPP-Hough transform[J]. Signal Processing, 2011, 91(6): 1432–1443. doi: 10.1016/j.sigpro.2010.08.001 [122] AOI M, LEPAGE K, LIM Y, et al. An approach to time-frequency analysis with ridges of the continuous chirplet transform[J]. IEEE Transactions on Signal Processing, 2015, 63(3): 699–710. doi: 10.1109/TSP.2014.2365756 [123] CHASSANDE-MOTTIN É and PAI A. Best chirplet chain: near-optimal detection of gravitational wave chirps[J]. Physical Review D, 2006, 73(4): 042003. [124] 李东宸, 水鹏朗, 许述文. 块白化杂波抑制的海面漂浮小目标检测方法[J]. 西安电子科技大学学报: 自然科学版, 2016, 43(6): 21–26. doi: 10.3969/j.issn.1001-2400.2016.06.004LI Dongchen, SHUI Penglang, and XU Shuwen. Floating small target detection in the sea clutter via block-whitened clutter suppression[J]. Journal of Xidian University, 2016, 43(6): 21–26. doi: 10.3969/j.issn.1001-2400.2016.06.004 [125] (美)科恩 L, 白居宪译. 时-频分析: 理论与应用[M]. 西安: 西安交通大学出版社, 1998.COHEN L, BAI Juxian translation. Time-Frequency Analysis: Theory and Application[M]. Xi’an: Xi’an Jiaotong University Press, 1998 [126] RICHARD C. Time-frequency-based detection using discrete-time discrete-frequency Wigner distributions[J]. IEEE Transactions on Signal Processing, 2002, 50(9): 2170–2176. doi: 10.1109/TSP.2002.801927 [127] FREEMAN A and DURDEN S L. A three-component scattering model for polarimetric SAR data[J]. IEEE Transactions on Geoscience and Remote Sensing, 1998, 36(3): 963–973. doi: 10.1109/36.673687 [128] RABIDEAU D J and PARKER P. Ubiquitous MIMO multifunction digital array radar[C]. The 37th Asilomar Conference on Signals, Systems & Computers, 2003, Pacific Grove, USA, 2003: 1057–1064. doi: 10.1109/ACSSC.2003.1292087. -


























计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

