
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
-
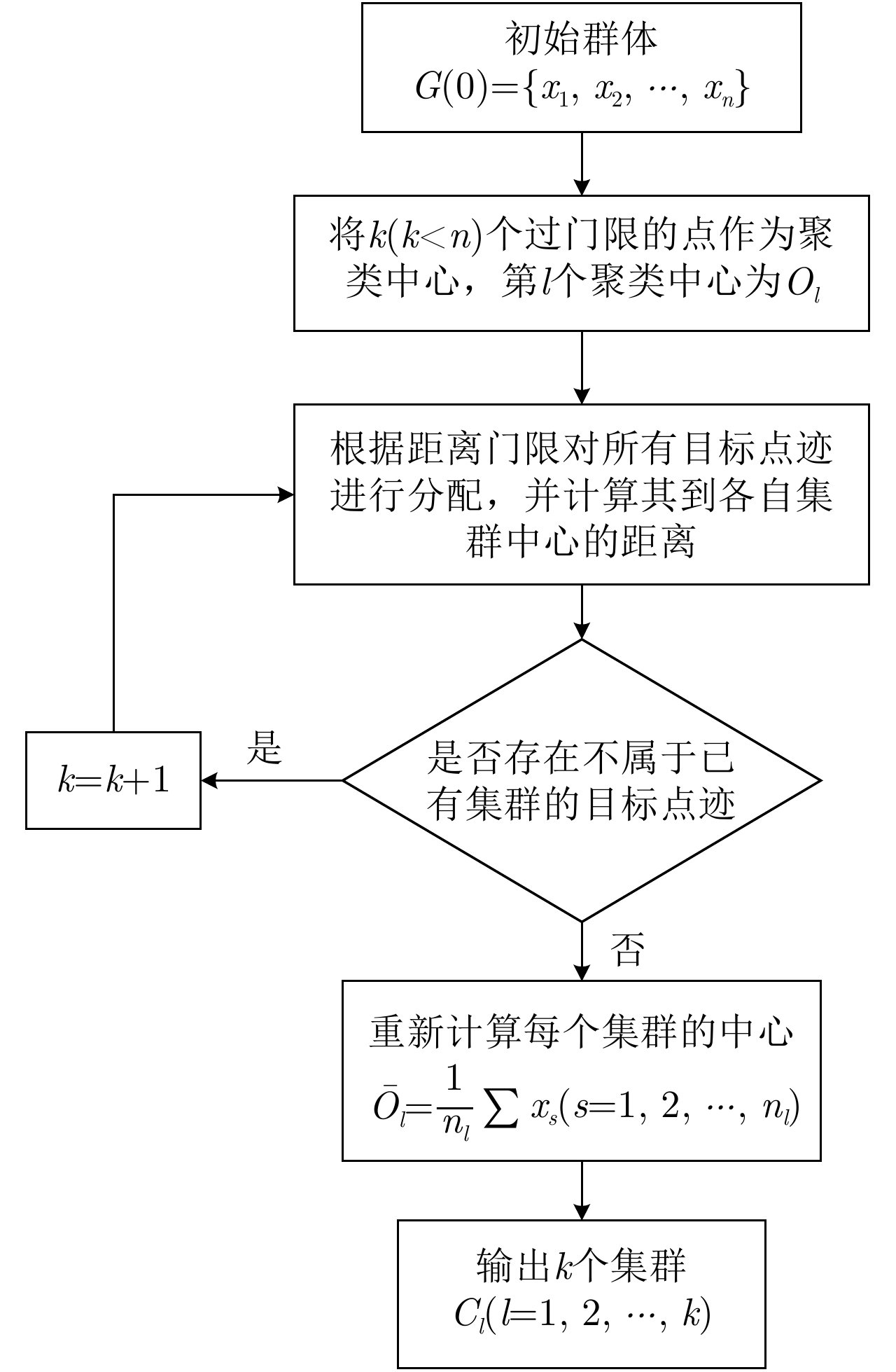
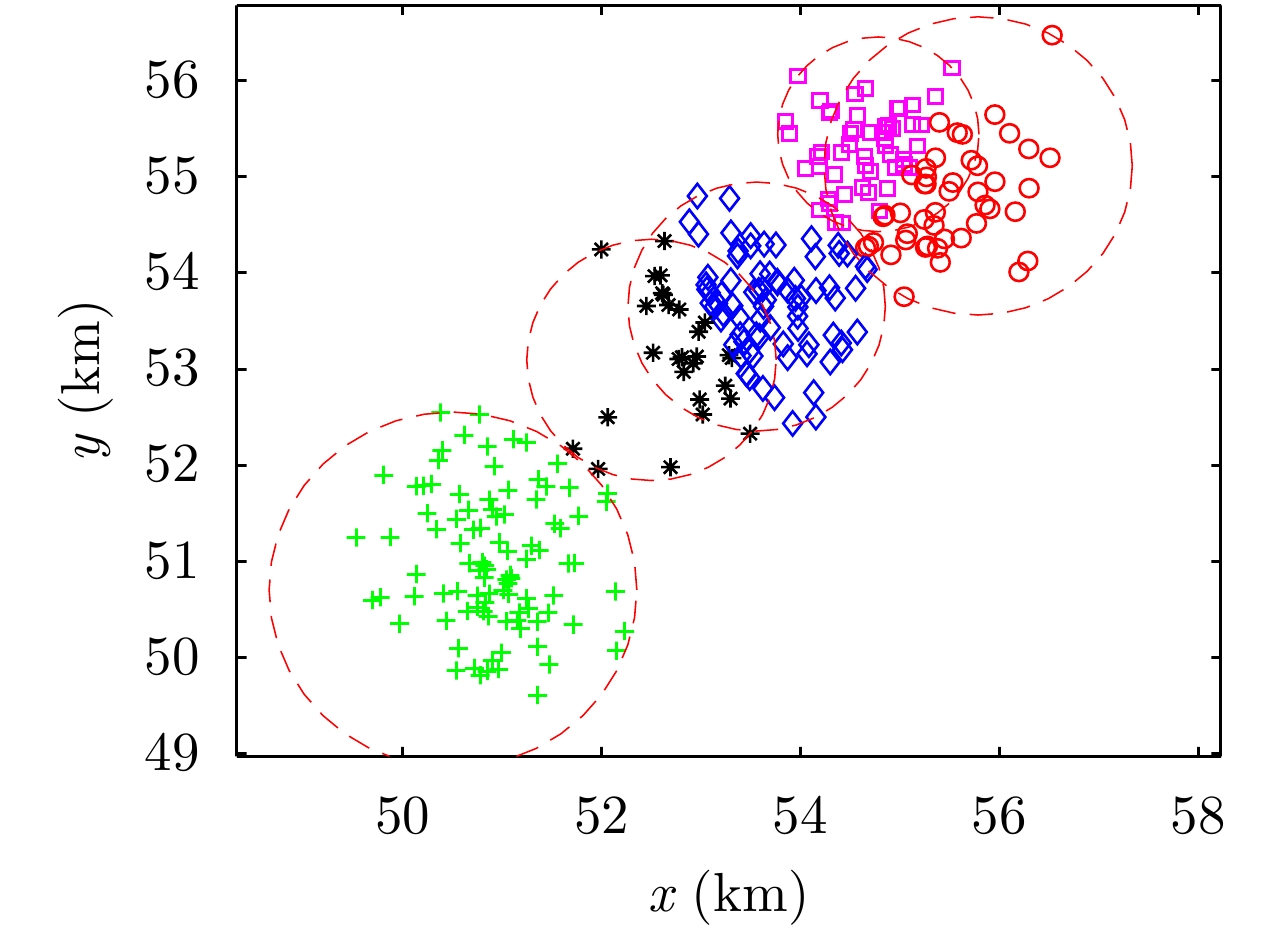
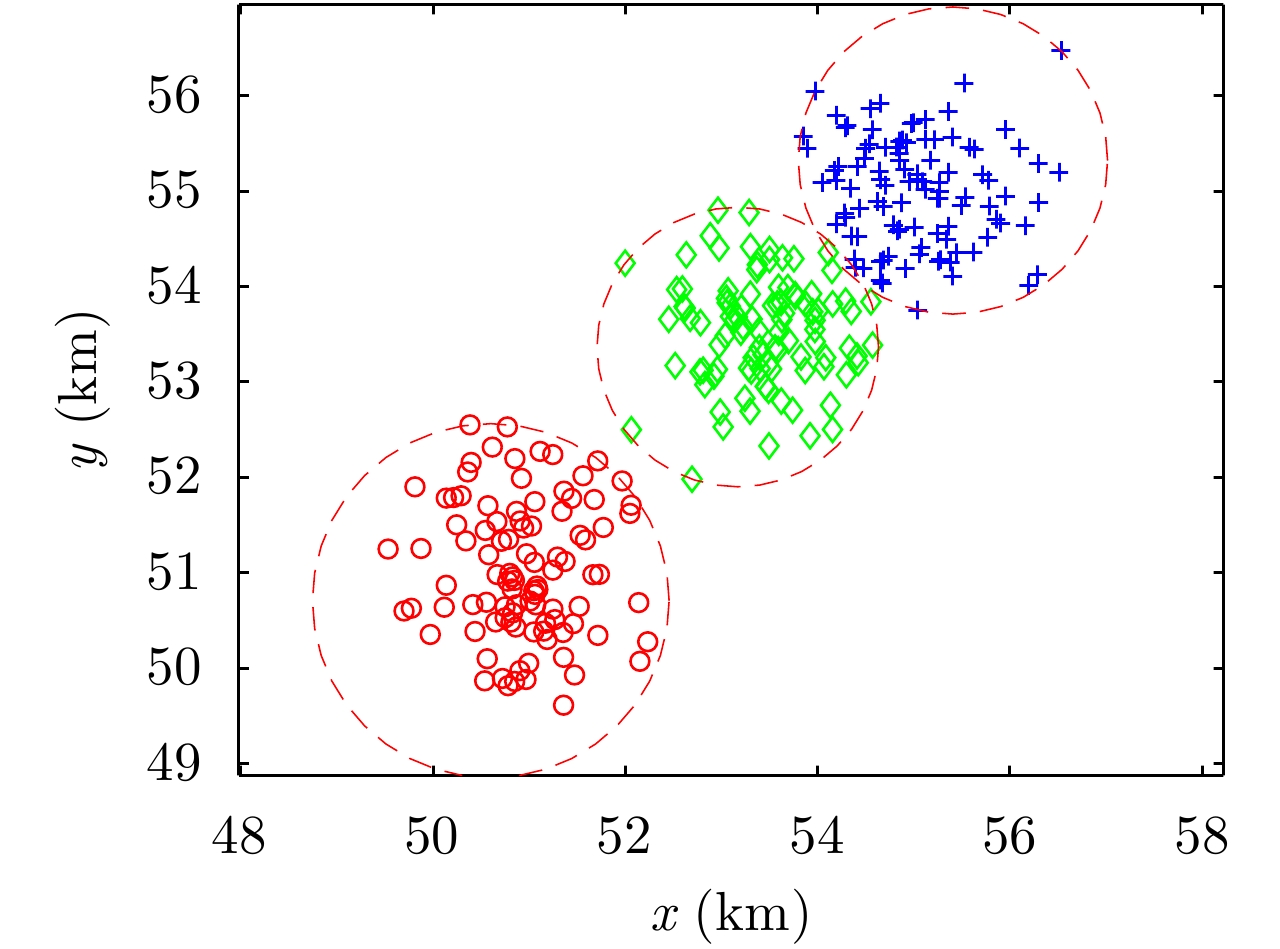
摘要: 航迹起始是群目标跟踪的首要环节,其性能好坏直接影响着目标跟踪航迹的质量。传统的群目标航迹起始方法仅利用目标的位置信息完成分群检测和等效量测求解等步骤,没有充分利用回波幅度信息,存在分群检测不理想、等效量测求解不准确等问题,有可能引起失跟现象。针对此问题,该文提出一种回波幅度信息辅助的群目标航迹起始方法。首先利用目标位置信息和幅度信息完成分群检测,然后综合采用幅度加权和位置加权求解等效量测,最后基于修正的逻辑法进行群目标航迹起始。该文方法在分群检测和求解等效量测等步骤充分利用了回波幅度信息,不仅可以在集群数量未知的情况下正确划分群,而且降低了失跟率,提高了群目标的跟踪性能。仿真结果验证了所提方法的有效性。Abstract: Track initiation is the first important step in group target tracking, and it has a direct effect on the quality of the overall procedure. Traditional radar target tracking methods only utilize information about the target position to detect group numbers, but they do not use information relating to echo amplitude. Tracks are thus easily lost, as the numbers of detected groups and equivalent measurements are inaccurate. This paper proposes a group target track initiation method aided by echo amplitude information to ameliorate these problems. In this respect, target position and echo amplitude information is used to detect the number of target groups, and equivalent measurements are then computed using amplitude weighting and position weighting. Echo amplitude information is employed in the step of detecting group target numbers and computing the equivalent measurements, and group target tracks are subsequently initialized using the modified logic method. The proposed method can be used to correctly detect the number of target groups when the number is previously unknown. Furthermore, the method reduces the rate of track loss and improves the performance of group target tracking. The effectiveness of the proposed method is validated by the simulation results.
-
Key words:
- Target tracking /
- Group target /
- Track initiation /
- Amplitude information /
- Cluster
-
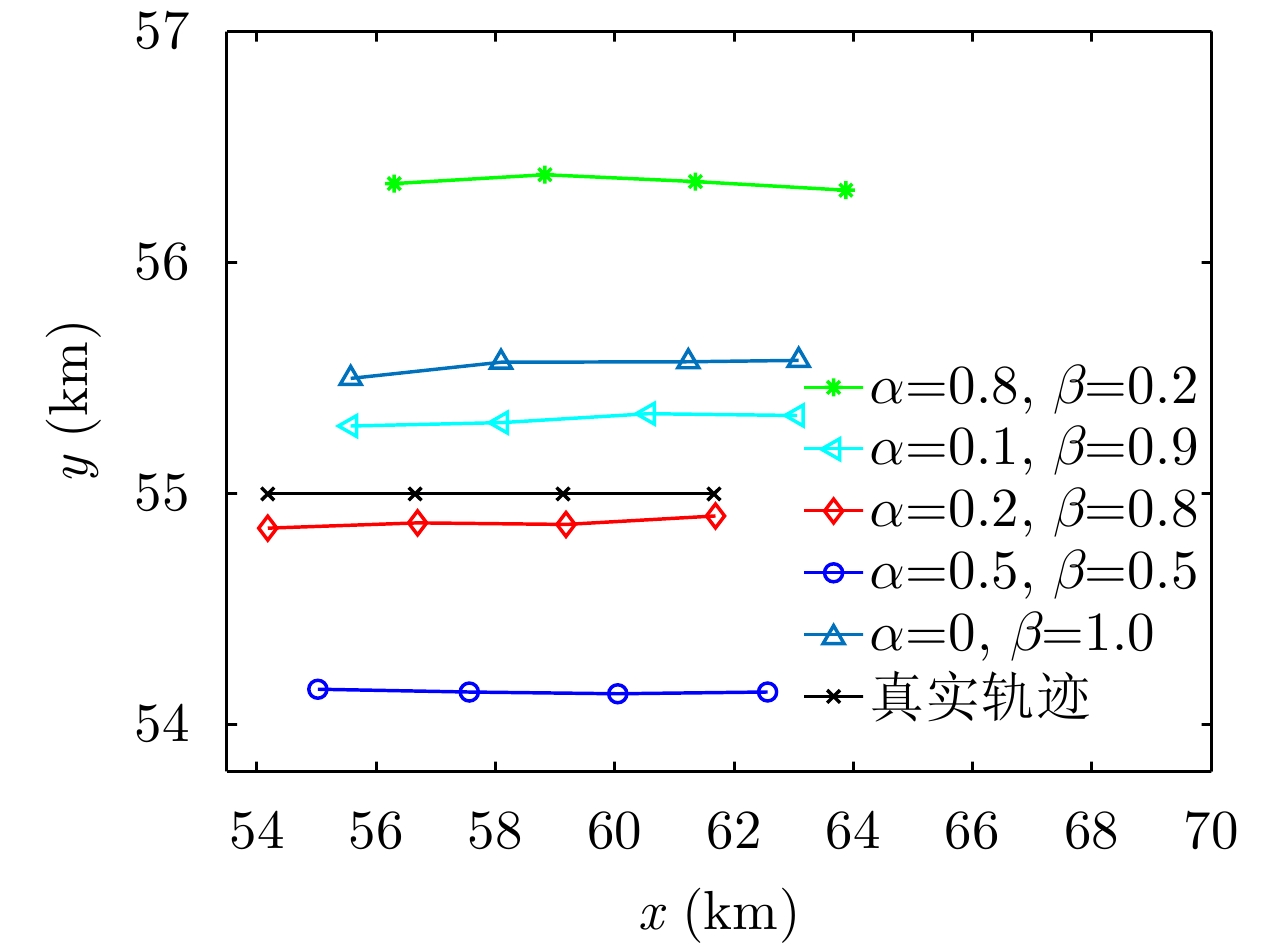
表 1 幅度、距离不同权值下航迹起始成功率
Table 1. The success rate of track start under different weights of amplitude and distance
$\alpha = 0.8, \beta = 0.2$ $\alpha = 0.5, \beta = 0.5$ $\alpha = 0.2, \beta = 0.8$ $\alpha = 0.1, \beta = 0.9$ $\alpha = 0, {\rm{}}\beta = 1.0$ 航迹起始成功率(%) 80 93 98 95 89  下载: 导出CSV
下载: 导出CSV
-
[1] NIEDFELDT P C and BEARD R W. Convergence and complexity analysis of recursive-RANSAC: A new multiple target tracking algorithm[J]. IEEE Transactions on Automatic Control, 2016, 61(2): 456–461. [2] ÚBEDA-MEDINA L, GARCÍA-FERNÁNDEZ Á F, and GRAJAL J. Adaptive auxiliary particle filter for track-before-detect with multiple targets[J]. IEEE Transactions on Aerospace and Electronic Systems, 2017, 53(5): 2317–2330. doi: 10.1109/TAES.2017.2691958 [3] ZHU Yun, WANG Jun, and LIANG Shuang. Efficient joint probabilistic data association filter based on Kullback-Leibler divergence for multi-target tracking[J]. IET Radar, Sonar & Navigation, 2017, 11(10): 1540–1548. [4] VIVONE G and BRACA P. Joint probabilistic data association tracker for extended target tracking applied to X-band marine radar data[J]. IEEE Journal of Oceanic Engineering, 2016, 41(4): 1007–1019. doi: 10.1109/JOE.2015.2503499 [5] LIAN Feng, HAN Chongzhao, LIU Weifeng, et al. Unified cardinalized probability hypothesis density filters for extended targets and unresolved targets[J]. Signal Processing, 2012, 92(7): 1729–1744. doi: 10.1016/j.sigpro.2012.01.009 [6] CAO Xianbin, JIANG Xiaolong, LI Xiaomei, et al. Correlation-based tracking of multiple targets with hierarchical layered structure[J]. IEEE Transactions on Cybernetics, 2018, 48(1): 90–102. doi: 10.1109/TCYB.2016.2625320 [7] 王聪, 王海鹏, 何友, 等. 基于ICP的稳态部分可辨编队目标精细跟踪算法[J]. 北京航空航天大学学报, 2017, 43(6): 1123–1131.WANG Cong, WANG Haipeng, HE You, et al. Refined tracking algorithm for steady partly resolvable group targets based on ICP[J]. Journal of Beijing University of Aeronautics and Astronautics, 2017, 43(6): 1123–1131. [8] 方琳琳, 周超, 王锐, 等. 昆虫目标雷达散射截面积特征辅助跟踪算法[J]. 雷达学报, 2019, 8(5): 598–605. doi: 10.12000/JR19067FANG Linlin, ZHOU Chao, WANG Rui, et al. RCS feature-aided insect target tracking algorithm[J]. Journal of Radars, 2019, 8(5): 598–605. doi: 10.12000/JR19067 [9] 封洪强. 雷达在昆虫学研究中的应用[J]. 植物保护, 2011, 37(5): 1–13. doi: 10.3969/j.issn.0529-1542.2011.05.001FENG Hongqiang. Applications of radar in entomological research[J]. Plant Protection, 2011, 37(5): 1–13. doi: 10.3969/j.issn.0529-1542.2011.05.001 [10] 耿文东. 基于群目标几何中心的群起始算法研究[J]. 系统工程与电子技术, 2008, 30(2): 269–272. doi: 10.3321/j.issn:1001-506X.2008.02.019GENG Wendong. Study of group-initialization method based on group-target center of geometry[J]. Systems Engineering and Electronics, 2008, 30(2): 269–272. doi: 10.3321/j.issn:1001-506X.2008.02.019 [11] 周大庆, 耿文东, 倪春雷. 基于编队目标重心的航迹起始方法研究[J]. 无线电工程, 2010, 40(2): 32–34. doi: 10.3969/j.issn.1003-3106.2010.02.011ZHOU Daqing, GENG Wendong, and NI Chunlei. Study of track initiation method based on barycenter of formation target[J]. Radio Engineering of China, 2010, 40(2): 32–34. doi: 10.3969/j.issn.1003-3106.2010.02.011 [12] KOCH J W. Bayesian approach to extended object and cluster tracking using random matrices[J]. IEEE Transactions on Aerospace and Electronic Systems, 2008, 44(3): 1042–1059. doi: 10.1109/TAES.2008.4655362 [13] 韩玉兰, 朱洪艳, 韩崇昭. 采用随机矩阵的多扩展目标滤波器[J]. 西安交通大学学报, 2015, 49(7): 98–104. doi: 10.7652/xjtuxb201507017HAN Yulan, ZHU Hongyan, and HAN Chongzhao. A multi-target filter based on random matrix[J]. Journal of Xi’an Jiaotong University, 2015, 49(7): 98–104. doi: 10.7652/xjtuxb201507017 [14] JIN Biao, JIU Bo, SU Tao, et al. Switched Kalman filter-interacting multiple model algorithm based on optimal autoregressive model for manoeuvring target tracking[J]. IET Radar, Sonar & Navigation, 2015, 9(2): 199–209. [15] GNING A, MIHAYLOVA L, MASKELL S, et al. Ground target group structure and state estimation with particle filtering[C]. The 2008 11th International Conference on Information Fusion, Cologne, Germany, 2008: 1–8. [16] LI Yunxiang, XIAO Huaitie, SONG Zhiyong, et al. A new multiple extended target tracking algorithm using PHD filter[J]. Signal Processing, 2013, 93(12): 3578–3588. doi: 10.1016/j.sigpro.2013.05.011 [17] LAN Jian and LI X R. Extended-object or group-target tracking using random matrix with nonlinear measurements[J]. IEEE Transactions on Signal Processing, 2019, 67(19): 5130–5142. doi: 10.1109/TSP.2019.2935866 [18] MIHAYLOVA L, CARMI A Y, SEPTIER F, et al. Overview of Bayesian sequential Monte Carlo methods for group and extended object tracking[J]. Digital Signal Processing, 2014, 25: 1–16. doi: 10.1016/j.dsp.2013.11.006 [19] DANIYAN A, LAMBOTHARAN S, DELIGIANNIS A, et al. Bayesian multiple extended target tracking using labeled random finite sets and splines[J]. IEEE Transactions on Signal Processing, 2018, 66(22): 6076–6091. doi: 10.1109/TSP.2018.2873537 [20] 何友, 修建娟, 关欣. 雷达数据处理及应用[M]. 3版. 北京: 电子工业出版社, 2013: 108–174.HE You, XIU Jianjuan, and GUAN Xin. Radar Data Processing with Applications[M]. 3rd ed. Beijing: Publishing House of Electronics Industry, 2013: 108–174. -










图(8) / 表(1)
计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

