
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
-
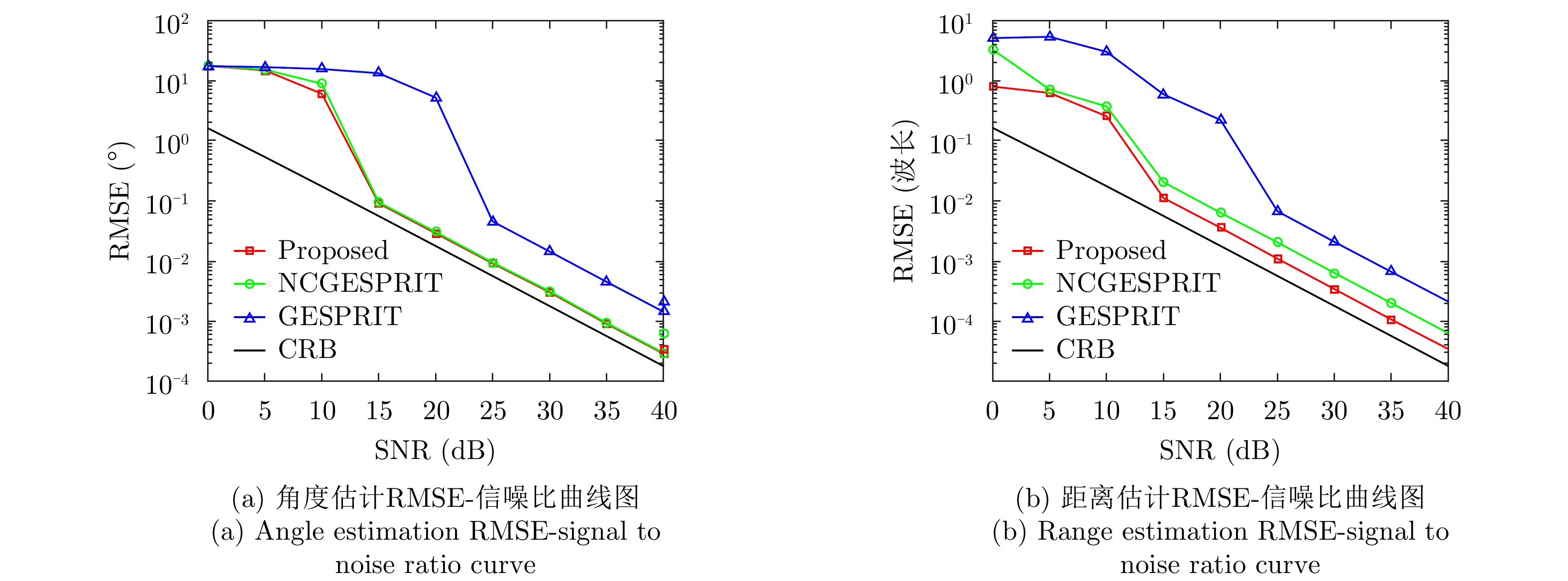
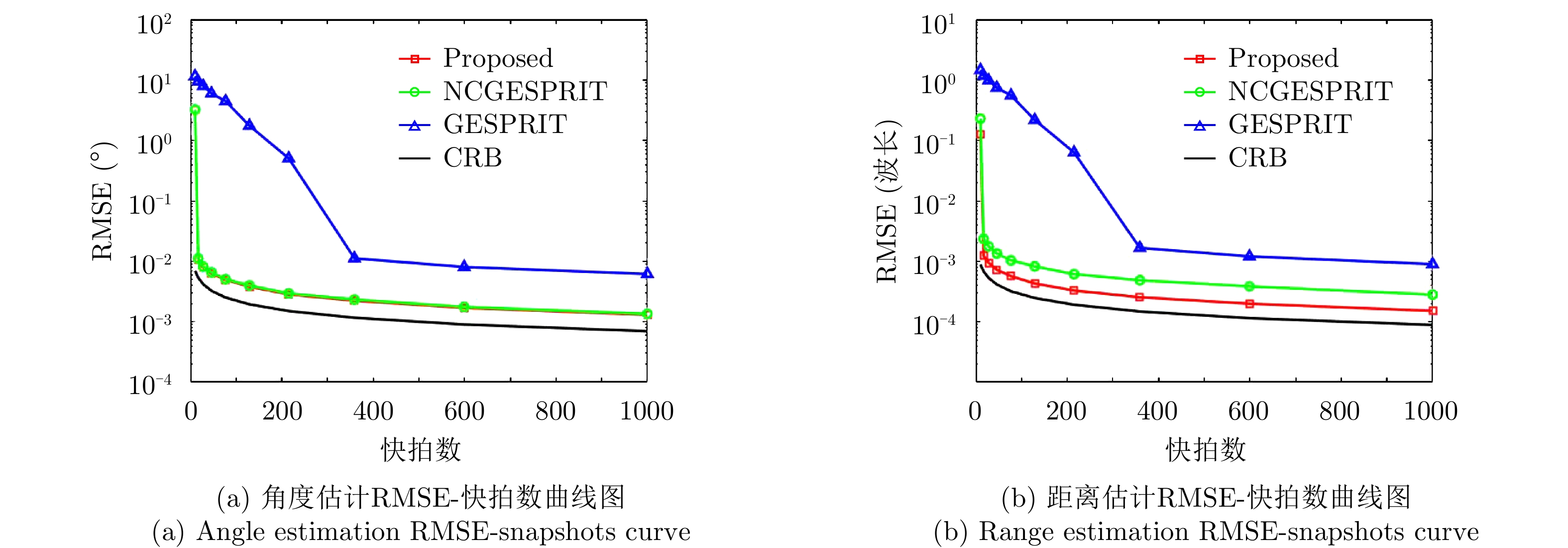
摘要: 该文基于对称的均匀线阵提出了一种近场非圆信号参数的快速估计算法,算法基于信号的非圆特性以及阵列的对称性对近场导向矢量进行解耦,并利用多项式求根取代传统的谱峰搜索对近场源的角度及距离参数进行快速估计。基于给定的阵列结构,建立非圆信号参数估计的多项式数学模型,然后对其进行求根即可获得近场信号源位置参数。所提算法采用多项式求根的方法有效地降低了运算复杂度,同时利用信号的非圆特性提高了参数估计的自由度(DOF)。通过性能分析和计算机仿真实验可以看出该算法能够分辨更多的近场非圆信号,并且参数估计性能有所提升,更接近于近场源参数估计的克拉美罗界(CRB)。Abstract: In this paper, a fast parameter estimation algorithm for near-field non-circular signals is proposed, which is based on symmetric, uniform, and linear array, that decouple the near-field steering vector via non-circularity and symmetry. Then, the position parameters are estimated based upon polynomial rooting technique instead of traditional spectral search. After fixing the array structure, the parameters for estimation equation are ascertained. Then the values of position parameters are obtained by solving the polynomial equations; consequently, computational difficulty is alleviated effectively. In addition, the Degree-Of-Freedom (DOF) is increased by utilizing the non-circularity characteristics of the impinging sources. It can be seen from the performance analysis and computer simulation experiments that the proposed algorithm can resolve more near-field non-circular signals and can improve parameter estimation performance, which is closer to the Cramer–Rao Bound (CRB) estimation.
-
表 1 矩阵M中的元素
Table 1. Elements of matrix M
元素位置 表达式 元素位置 表达式 ${m_{11}}(z)$ $\displaystyle\sum \nolimits_i {\displaystyle\sum \nolimits_j { {{L} }({ {{u} }_i},{ {{u} }_j}){z^{ { {{u} }_i} - { {{u} }_j} } } } }$ ${m_{12}}(z)$ $\displaystyle\sum \nolimits_i {\displaystyle\sum \nolimits_j { {{L} }({ {{u} }_i},{ {{v} }_j}){z^{ { {{u} }_i} - { {{v} }_j} } } } }$ ${m_{13}}(z)$ $\displaystyle\sum \nolimits_i { {{S} }({ {{u} }_i},{ {{u} }_i}){z^{2{ {{u} }_i} - 4} } + } \underbrace {\displaystyle\sum \nolimits\nolimits_i {\displaystyle\sum \nolimits\nolimits_j { {{S} }({ {{u} }_i},{ {{u} }_j})} } }_{i \ne j}$ ${m_{14}}(z)$ $\displaystyle\sum \nolimits_i {\displaystyle\sum \nolimits_j { {{S} }({ {{u} }_i},{ {{v} }_j})} } {z^{ { {{u} }_i} - { {{v} }_j} } }$ ${m_{21}}(z)$ $\displaystyle\sum \nolimits_i {\displaystyle\sum \nolimits_j { {{L} }({ {{v} }_i},{ {{u} }_j}){z^{ { {{v} }_i} - { {{u} }_j} } } } }$ ${m_{22}}(z)$ $\displaystyle\sum \nolimits_i {\displaystyle\sum \nolimits_j { {{L} }({ {{v} }_i},{ {{v} }_j}){z^{ { {{v} }_i} - { {{v} }_j} } } } }$ ${m_{23}}(z)$ $\displaystyle\sum \nolimits_i {\displaystyle\sum \nolimits_j { {{S} }({ {{v} }_i},{ {{u} }_j}){z^{ - { {{v} }_i} + { {{u} }_j} } } } }$ ${m_{24}}(z)$ $\displaystyle\sum \nolimits_i {\displaystyle\sum \nolimits_j { {{S} }({ {{v} }_i},{ {{v} }_j}){z^{ { {{v} }_i} - { {{v} }_j} } } } }$ ${m_{31}}(z)$ $\displaystyle\sum \nolimits_i { {{Y} }({ {{u} }_i},{ {{u} }_i}){z^{ - 2{ {{u} }_i} + 4} } + } \underbrace {\displaystyle\sum \nolimits\nolimits_i {\displaystyle\sum \nolimits\nolimits_j { {{Y} }({ {{u} }_i},{ {{u} }_j})} } }_{i \ne j}$ ${m_{32}}(z)$ $\displaystyle\sum \nolimits_i {\displaystyle\sum \nolimits_j { {{Y} }({ {{u} }_i},{ {{v} }_j}){z^{ - { {{u} }_i} + { {{v} }_j} } } } }$ ${m_{33}}(z)$ $\displaystyle\sum \nolimits_i {\displaystyle\sum \nolimits_j { {{W} }({ {{u} }_i},{ {{u} }_j}){z^{ - { {{u} }_i} + { {{u} }_j} } } } }$ ${m_{34}}(z)$ $\displaystyle\sum \nolimits_i {\displaystyle\sum \nolimits_j { {{W} }({ {{u} }_i},{ {{v} }_j}){z^{ - { {{u} }_i} + { {{v} }_j} } } } }$ ${m_{41}}(z)$ $\displaystyle\sum \nolimits_i {\displaystyle\sum \nolimits_j { {{Y} }({ {{v} }_i},{ {{u} }_j})} } {z^{ { {{v} }_i} - { {{u} }_j} } }$ ${m_{42}}(z)$ $\displaystyle\sum \nolimits_i {\displaystyle\sum \nolimits_j { {{Y} }({ {{v} }_i},{ {{v} }_j}){z^{ { {{v} }_i} - { {{v} }_j} } } } }$ ${m_{43}}(z)$ $\displaystyle\sum \nolimits_i {\displaystyle\sum \nolimits_j { {{W} }({ {{v} }_i},{ {{u} }_j}){z^{ - { {{v} }_i} + { {{u} }_j} } } } }$ ${m_{44}}(z)$ $\displaystyle\sum \nolimits_i {\displaystyle\sum \nolimits_j { {{W} }({ {{v} }_i},{ {{v} }_j}){z^{ { {{v} }_i} - { {{v} }_j} } } } }$  下载: 导出CSV
下载: 导出CSV
表 2 算法运算复杂度比较
Table 2. Algorithm complexity comparison
算法 统计量矩阵 特征值分解 谱峰搜索 GESPRIT $O(2{N^2}/L)$ $8{N^3}/3$ $K{N^2}/{\Delta _r}({R_{\max } } - {R_{\min } }) + 360{N^2}/{\Delta _\theta }$ NCGESPRIT $O(4{N^2}/L)$ $32{N^3}/3$ $4K{N^2}/{\Delta _r}({R_{\max } } - {R_{\min } }) + 720{N^2}/{\Delta _\theta }$ 本文算法 $O(4{N^2}/L)$ $32{N^3}/3$
下载: 导出CSV
-
[1] JOHNSON R C. Antenna Engineering Handbook[M]. 3rd ed. New York, USA: McGraw-Hill, 1993: 36–39. [2] HUANG Y D and BARKAT M. Near-field multiple source localization by passive sensor array[J]. IEEE Transactions on Antennas and Propagation, 1991, 39(7): 968–975. doi: 10.1109/8.86917 [3] CHALLA R N and SHAMSUNDER S. High-order subspace-based algorithms for passive localization of near-field sources[C]. The 29th Asilomar Conference on Signals, Systems and Computers, Pacific Grove, USA, 1995: 777–781. doi: 10.1109/ACSSC.1995.540806. [4] ZHI Wanjun and CHIA M Y W. Near-field source localization via symmetric subarrays[J]. IEEE Signal Processing Letters, 2007, 14(6): 409–412. doi: 10.1109/LSP.2006.888390 [5] XIE Jian, TAO Haihong, RAO Xuan, et al. Comments on “near-field source localization via symmetric subarrays”[J]. IEEE Signal Processing Letters, 2015, 22(5): 643–644. doi: 10.1109/LSP.2014.2364174 [6] CHARGÉ P, WANG Yide, and SAILLARD J. A non-circular sources direction finding method using polynomial rooting[J]. Signal Processing, 2001, 81(8): 1765–1770. doi: 10.1016/S0165-1684(01)00071-8 [7] SHEN Lei, LIU Zhiwen, and XU Yougen. Parameter estimation of rectilinear signals using multiple noncollocated and diversely polarized antennas[C]. 2016 CIE International Conference on Radar (RADAR), Guangzhou, China, 2016: 1–5. doi: 10.1109/RADAR.2016.8059546. [8] XIE Jian, TAO Haihong, RAO Xuan, et al. Real-valued localisation algorithm for near-field non-circular sources[J]. Electronics Letters, 2015, 51(17): 1330–1331. doi: 10.1049/el.2015.0454 [9] XIE Jian, TAO Haihong, RAO Xuan, et al. Passive localization of noncircular sources in the near-field[C]. 2015 16th International Radar Symposium (IRS), Dresden, Germany, 2015: 493–498. doi: 10.1109/IRS.2015.7226309. [10] XIE Jian, TAO Haihong, RAO Xuan, et al. Efficient method of passive localization for near-field noncircular sources[J]. IEEE Antennas and Wireless Propagation Letters, 2015, 14: 1223–1226. doi: 10.1109/LAWP.2015.2399534 [11] KUANG Meidong, WANG Ling, XIE Jian, et al. Real-valued near-field localization of partially polarized noncircular sources with a cross-dipole array[J]. IEEE Access, 2019, 7: 36623–36632. doi: 10.1109/ACCESS.2019.2904837 [12] CHEN Hua, LI Youming, ZHU Weiping, et al. Joint DOA and range estimation for mixed near-field and far-field strictly noncircular sources[C]. 2018 IEEE 23rd International Conference on Digital Signal Processing (DSP), Shanghai, China, 2018: 1–5. doi: 10.1109/ICDSP.2018.8631547. [13] CHEN Hua, LIU Wei, ZHU Weiping, et al. Noncircularity-based localization for mixed near-field and far-field sources with unknown mutual coupling[C]. 2018 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Calgary, Canada, 2018: 3236–3240. doi: 10.1109/ICASSP.2018.8462266. [14] FERREOL A, BOYER E, and LARZABAL P. Low-cost algorithm for some bearing estimation methods in presence of separable nuisance parameters[J]. Electronics Letters, 2004, 40(15): 966–967. doi: 10.1049/el:20040537 [15] STOICA P, LARSSON E G, and GERSHMAN A B. The stochastic CRB for array processing: A textbook derivation[J]. IEEE Signal Processing Letters, 2001, 8(5): 148–150. doi: 10.1109/97.917699 -











































图(4) / 表(2)
计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

