
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
-
摘要: 该文从全极化体制角度出发,提出一种基于极化联合特征的海面目标检测方法。首先基于极化协方差矩阵,通过Cloude特征分解,提取表征回波随机程度的极化熵和反熵的数学期望;接着直接基于极化散射矩阵,通过Krogager特征分解,提取表征回波中极化散射分量结构组成的球散射体分量、二面角散射体分量和螺旋体散射分量的归一化系数;由提取的特征构成五维特征空间,利用主成分分析(PCA)降维证明所提特征具有良好的可分性,最后采用一类支持向量机(OCSVM)对目标和杂波进行识别。所提方法分别从极化相干和非相干分解两个角度出发,通过两种不同的极化分解方式提取特征,在一定程度上解决了高海情下基于单一极化分解方法存在的检测效果不理想的问题。通过IPIX实测数据验证所提方法具有良好的检测能力。Abstract: Polarization is a property applying to transverse waves that specifies the geometrical orientation of the oscillations. This paper proposes a method for detecting small targets on the sea surface based on the combination of polarization features of two models. The scattering mechanism of sea clutter is random scattering at low glazing angle or glancing angle and the randomness is high as the angles do not have any specified shape. However, a target has a specific shape, and thus, the randomness of scattering will be less. Clutter is a term used for unwanted echoes in electronic systems, particularly in reference to radars. Such echoes typically return from ground, sea, rain, and animals/insects. In this literature, the randomness of a scattering mechanism in an echo is obtained from the probability density functions of polarization entropy using the Cloude decomposition model. Further, the proportion of scattering at spherical, dihedral, and helicoid angles from the target echoes will be different in the sea clutter. Therefore, the relative coefficient of power of these three scattering components in each echo is extracted based on Krogager polarization decomposition. Then, polarization features with good separability and complementarity are selected to form the polarization feature vector, and the characteristics are verified by Principle Component Analysis (PCA). Finally, One Class Support Vector Machine (OCSVM) is used for classification and recognition based on the polarization decomposition feature vector. Instead of single-polarization detection methods, our method uses two polarization modes to extract the decomposition features with separability and complementarity through polarization coherent decomposition and incoherent decomposition, respectively. The experimental results of the IPIX data show the effectiveness of our method. Thus, the detection performance of our model is better than those methods based on single-polarization decomposition in complex and difficult sea conditions.
-
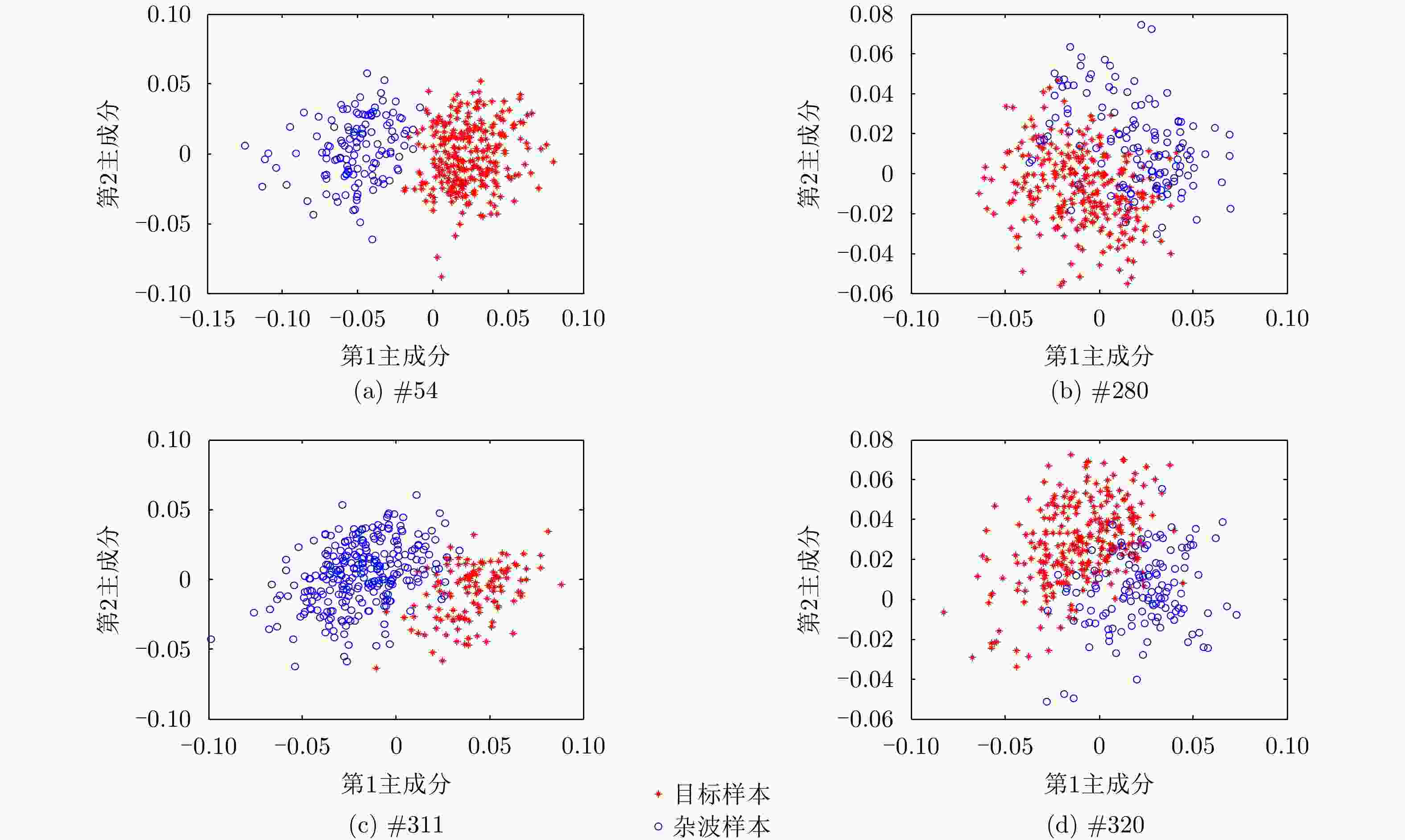
图 1 各数据集第1杂波距离门与目标距离门特征对应的二维散布图
Figure 1. The 2D scatter graph corresponding to the characteristics of clutter cell and target cell in each dataset
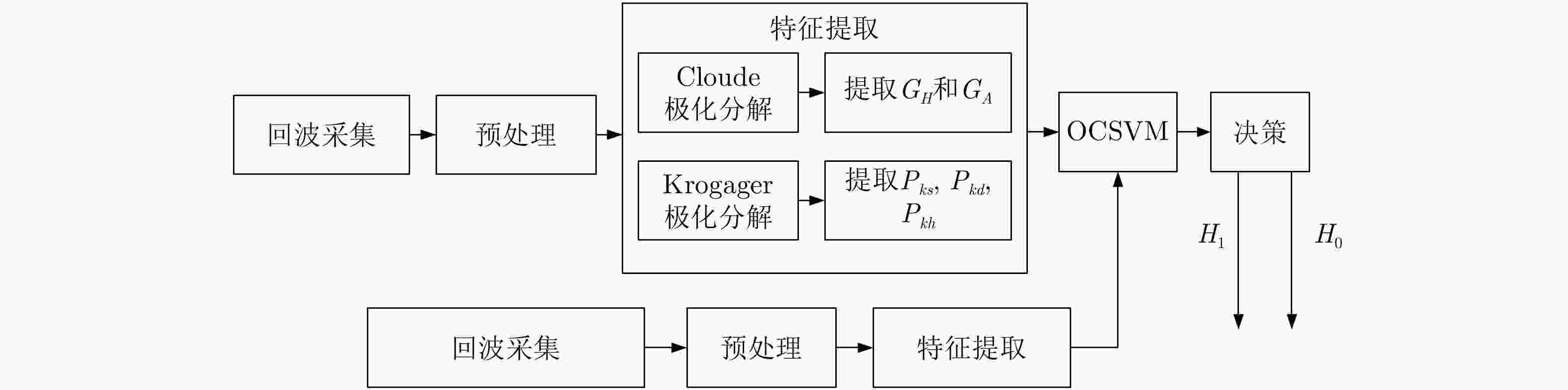
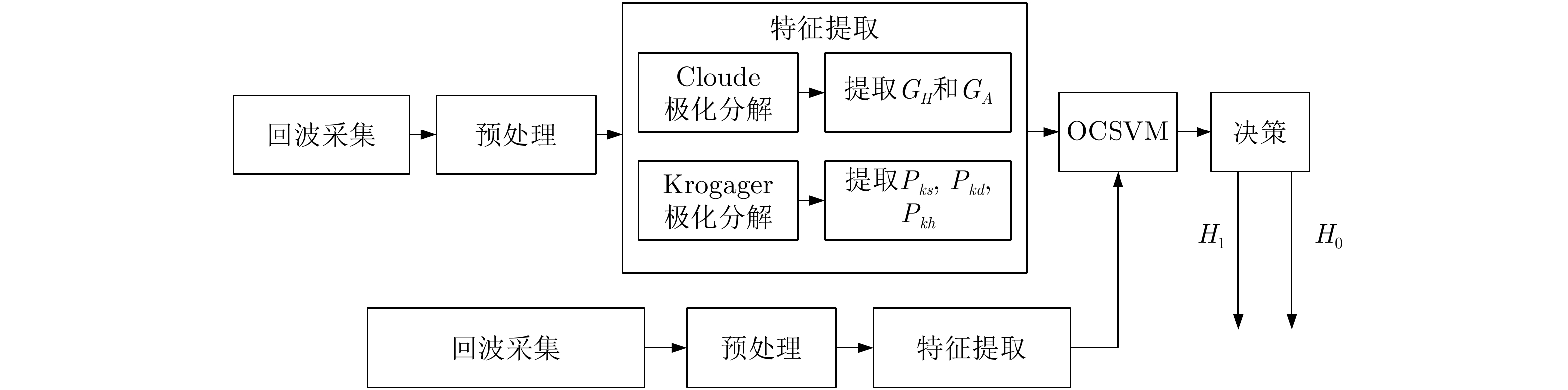
图 2 基于极化联合特征的海面目标检测流程图
Figure 2. Flow chart of surface target detection based on polarization joint feature
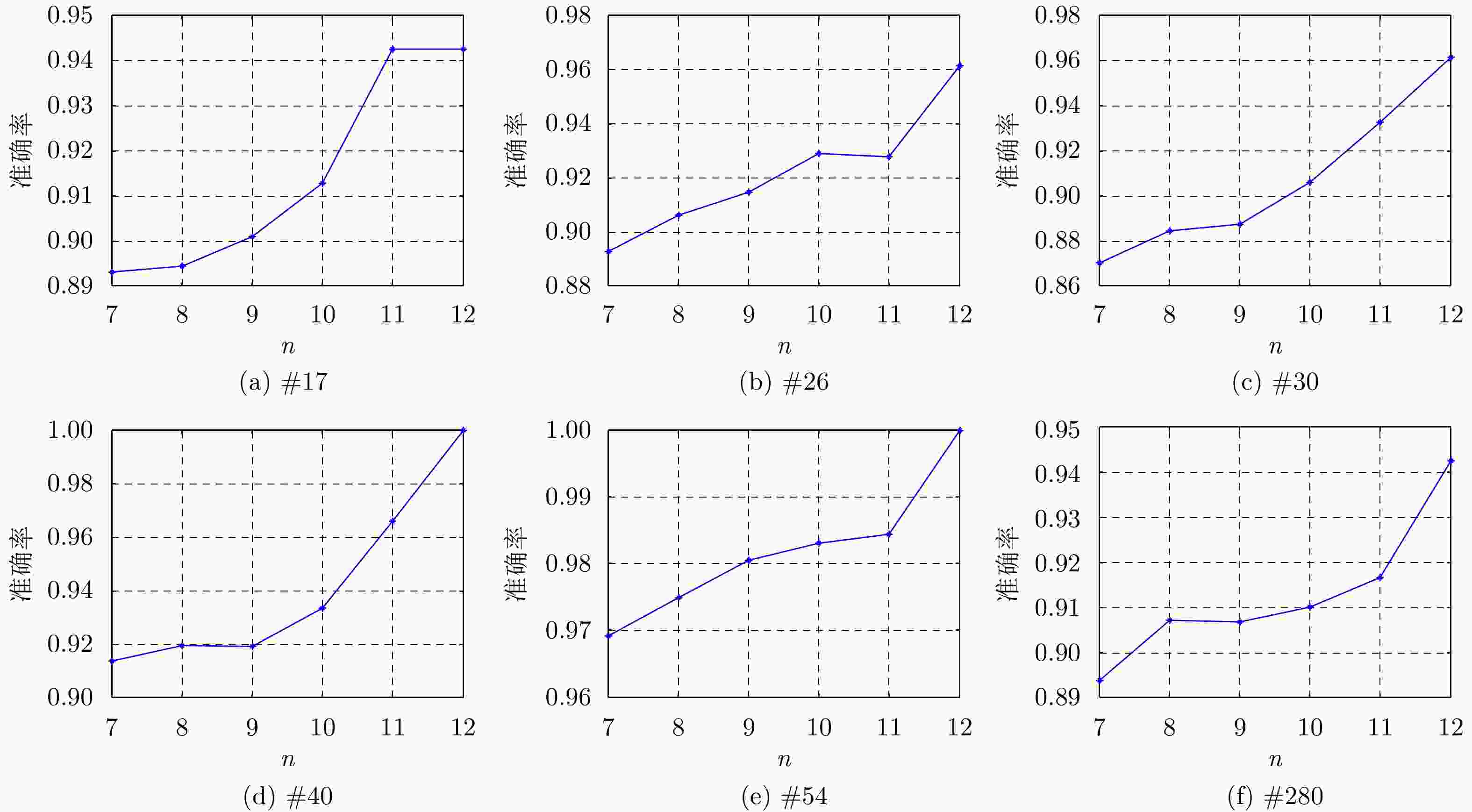
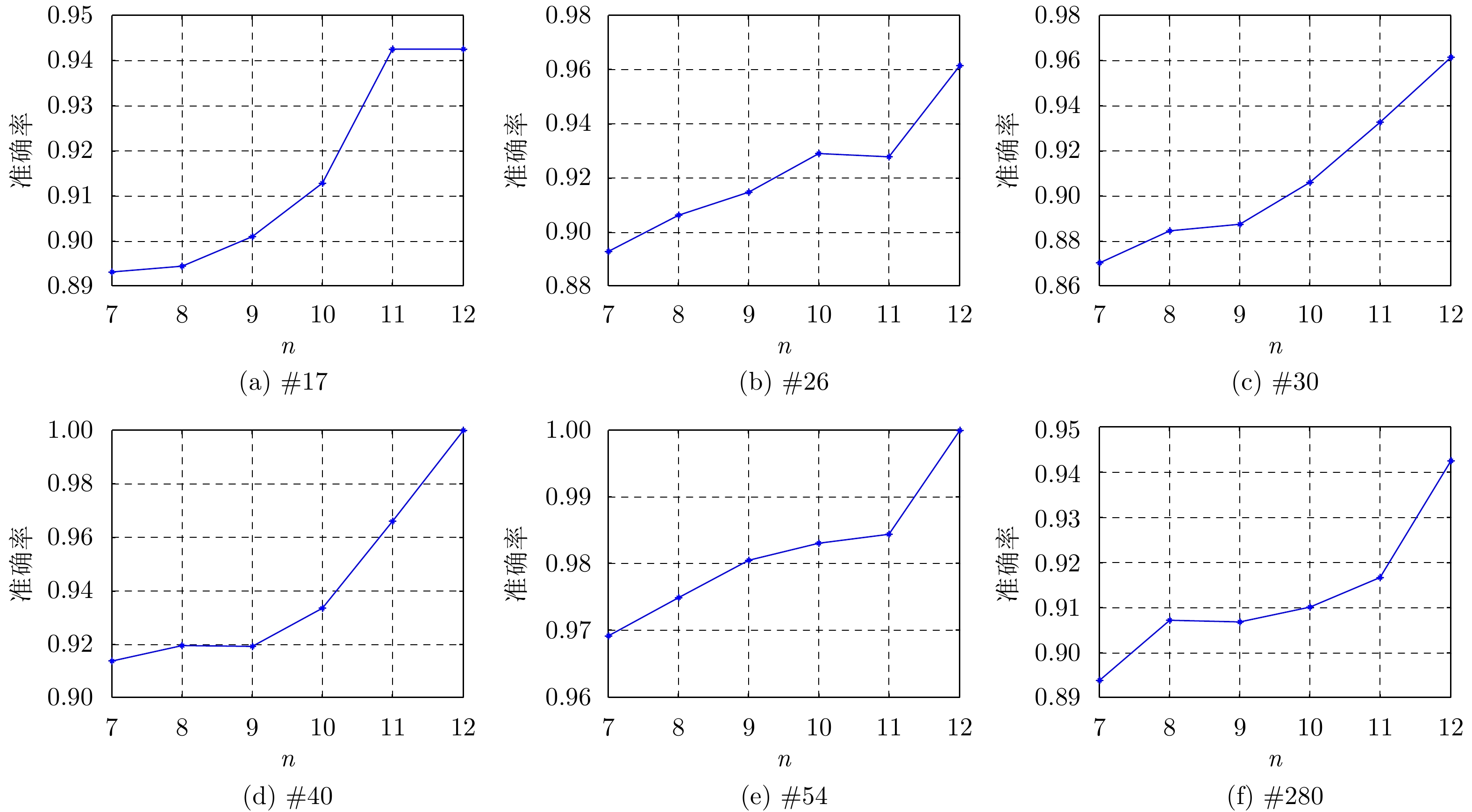
图 3 不同观测时间下不同数据集的检测准确率
Figure 3. Detection accuracy of different data sets in different observation time
表 1 1993年IPIX雷达数据主要参数说明
Table 1. The description of IPIX datasets in 1993
序号 数据编号 目标所在单元 受目标影响单元 风速(km/h) 浪高(m) 平均信杂比(dB) 1 #17 9 8:11 9 2.2 11.95 2 #26 7 6:8 9 1.1 6.43 3 #30 7 6:8 19 0.9 2.96 4 #31 7 6:9 19 0.9 8.03 5 #40 7 5:8 9 1.0 11.39 6 #54 8 7:10 20 0.7 13.88 7 #280 8 7:10 10 1.6 6.20 8 #310 7 6:9 33 0.9 2.52 9 #311 7 6:9 33 0.9 11.38 10 #320 7 6:9 28 0.9 10.64  下载: 导出CSV
下载: 导出CSV
表 2 实验样本数说明
Table 2. The description of experimental sample number
观测时间(ms) 纯杂波样本数 目标样本数 训练样本数 测试样本数 纯杂波样本 纯杂波样本 目标样本数 128 10240 1024 5120 5120 1024 256 5120 512 2560 2560 512 512 2560 256 1280 1280 256 1024 1280 128 640 640 128 2048 640 64 320 320 64 4096 320 32 160 160 32
下载: 导出CSV
表 3 不同核函数下OCSVM在3组数据集上的检测正确率(%)
Table 3. The detection accuracy of OCSVM in the three datasets with different kernel functions
核函数类型 线性核函数 多项式核函数 Sigmoid核函数 高斯核函数 #54 50.49 91.91 74.51 96.81 #280 61.76 72.79 70.10 89.07 #311 33.82 86.27 76.72 95.10
下载: 导出CSV
表 4 不同极化分解后的检测性能
Table 4. The detection performance after different polarization decomposition
数据编号 特征向量 目标检测概率(%) 虚警概率(%) #280 $\left[ {{G_H},{G_A}} \right]$ 65.63 18.75 $\left[ {{K_s},{K_d},{K_h}} \right]$ 90.19 2.38 $\left[ {{G_H},{G_A},{K_s},{K_d},{K_h}} \right]$ 91.02 2.19 #311 $\left[ {{G_H},{G_A}} \right]$ 82.81 7.81 $\left[ {{K_s},{K_d},{K_h}} \right]$ 96.88 2.38 $\left[ {{G_H},{G_A},{K_s},{K_d},{K_h}} \right]$ 97.79 1.72 #320 $\left[ {{G_H},{G_A}} \right]$ 25.00 18.74 $\left[ {{K_s},{K_d},{K_h}} \right]$ 95.94 1.56 $\left[ {{G_H},{G_A},{K_s},{K_d},{K_h}} \right]$ 98.57 1.25 #54 $\left[ {{G_H},{G_A}} \right]$ 86.88 4.69 $\left[ {{K_s},{K_d},{K_h}} \right]$ 95.94 2.38 $\left[ {{G_H},{G_A},{K_s},{K_d},{K_h}} \right]$ 98.31 1.88
下载: 导出CSV
表 5 不同观测时间下不同方法的检测性能
Table 5. The detection performance of different methods in different observation time
观测时间(ms) ${C_R}$ ${F_R}$ DBEA Tri-FPC 3D-PFM 所提方法 DBEA Tri-FPC 3D-PFM 所提方法 128 0.8478 0.8961 0.8948 0.9126 0.0104 0.0104 0.0112 0.0126 1024 0.8596 0.9178 0.9197 0.9377 0.0107 0.0146 0.0137 0.0166 4096 0.8797 0.9510 0.9493 0.9668 0.0193 0.0175 0.0218 0.0181
下载: 导出CSV
-
[1] FARINA A and STUDER F A. A review of CFAR detection techniques in radar systems[J]. Microware Journal, 1986, 29(5): 115, 116, 118. [2] 丁昊, 刘宁波, 董云龙, 等. 雷达海杂波测量试验回顾与展望[J]. 雷达学报, 2019, 8(3): 281–302. doi: 10.12000/JR19006DING Hao, LIU Ningbo, DONG Yunlong, et al. Overview and prospects of radar sea clutter measurement experiments[J]. Journal of Radars, 2019, 8(3): 281–302. doi: 10.12000/JR19006 [3] 刘宁波, 董云龙, 王国庆, 等. X波段雷达对海探测试验与数据获取[J]. 雷达学报, 2019, 8(5): 656–667. doi: 10.12000/JR19089LIU Ningbo, DONG Yunlong, WANG Guoqing, et al. Sea-detecting X-band radar and data acquisition program[J]. Journal of Radars, 2019, 8(5): 656–667. doi: 10.12000/JR19089 [4] 丁昊, 王国庆, 刘宁波, 等. 逆Gamma纹理背景下两类子空间目标的自适应检测方法[J]. 雷达学报, 2017, 6(3): 275–284. doi: 10.12000/JR16088DING Hao, WANG Guoqing, LIU Ningbo, et al. Adaptive detectors for two types of subspace targets in an inverse gamma textured background[J]. Journal of Radars, 2017, 6(3): 275–284. doi: 10.12000/JR16088 [5] 许述文, 石星宇, 水鹏朗. 复合高斯杂波下抑制失配信号的自适应检测器[J]. 雷达学报, 2019, 8(3): 326–334. doi: 10.12000/JR19030XU Shuwen, SHI Xingyu, and SHUI Penglang. An adaptive detector with mismatched signals rejection in compound Gaussian clutter[J]. Journal of Radars, 2019, 8(3): 326–334. doi: 10.12000/JR19030 [6] SHI Yanling, XIE Xiaoyan, and LI Dongchen. Range distributed floating target detection in sea clutter via feature-based detector[J]. IEEE Geoscience and Remote Sensing Letters, 2016, 13(12): 1847–1850. doi: 10.1109/LGRS.2016.2614750 [7] 左磊, 产秀秀, 禄晓飞, 等. 基于空域联合时频分解的海面微弱目标检测方法[J]. 雷达学报, 2019, 8(3): 335–343. doi: 10.12000/JR19035ZUO Lei, CHAN Xiuxiu, LU Xiaofei, et al. A weak target detection method in sea clutter based on joint space-time-frequency decomposition[J]. Journal of Radars, 2019, 8(3): 335–343. doi: 10.12000/JR19035 [8] LUO Feng, ZHANG Danting, and ZHANG Bo. The fractal properties of sea clutter and their applications in maritime target detection[J]. IEEE Geoscience and Remote Sensing Letters, 2013, 10(6): 1295–1299. doi: 10.1109/LGRS.2013.2237750 [9] 陈世超, 罗丰, 胡冲, 等. 基于多普勒谱非广延熵的海面目标检测方法[J]. 雷达学报, 2019, 8(3): 344–354. doi: 10.12000/JR19012CHEN Shichao, LUO Feng, HU Chong, et al. Small target detection in sea clutter background based on Tsallis entropy of Doppler spectrum[J]. Journal of Radars, 2019, 8(3): 344–354. doi: 10.12000/JR19012 [10] SHUI Penglang, LI Dongchen, and XU Shuwen. Tri-feature-based detection of floating small targets in sea clutter[J]. IEEE Transactions on Aerospace and Electronic Systems, 2014, 50(2): 1416–1430. doi: 10.1109/TAES.2014.120657 [11] 许述文, 蒲佳. 基于四极化通道融合的海面漂浮微弱目标特征检测[J]. 信号处理, 2017, 33(3): 324–329. doi: 10.16798/j.issn.1003-0530.2017.03.011XU Shuwen and PU Jia. Floating small targets detection in sea clutter based on four-polarization-channels fusion[J]. Journal of Signal Processing, 2017, 33(3): 324–329. doi: 10.16798/j.issn.1003-0530.2017.03.011 [12] 田玉芳, 尹志盈, 姬光荣, 等. 基于SVM的海面弱目标检测[J]. 中国海洋大学学报, 2013, 43(7): 104–109.TIAN Yufang, YIN Zhiying, JI Guangrong, et al. Weak targets detection in sea clutter based on SVM[J]. Periodical of Ocean University of China, 2013, 43(7): 104–109. [13] 武鹏, 王俊, 王文光. 基于极化特征分解的海上小目标检测算法研究[J]. 电子与信息学报, 2011, 33(4): 816–822. doi: 10.3724/SP.J.1146.2010.00678WU Peng, WANG Jun, and WANG Wenguang, et al. Small target detection in sea clutter based on polarization characteristics decomposition[J]. Journal of Electronics &Information Technology, 2011, 33(4): 816–822. doi: 10.3724/SP.J.1146.2010.00678 [14] XU Shuwen, ZHENG Jibin, PU Jia, et al. Sea-surface floating small target detection based on polarization features[J]. IEEE Geoscience and Remote Sensing Letters, 2018, 15(10): 1505–1509. doi: 10.1109/LGRS.2018.2852560 [15] MORRIS J T and ANDERSON S J. Aspect dependence of the polarimetric characteristics of sea clutter: I. Variation with elevation angle[C]. 2008 International Conference on Radar, Adelaide, Australia, 2008: 106–110. [16] ANDERSON S J and MORRIS J T. Aspect dependence of the polarimetric characteristics of sea clutter: II. Variation with azimuth angle[C]. 2008 International Conference on Radar, Adelaide, Australia, 2008: 581–585. [17] 张新勋, 周生华, 刘宏伟. 目标极化散射特性对极化分集雷达检测性能的影响[J]. 雷达学报, 2019, 8(4): 510–518. doi: 10.12000/JR18112ZHANG Xinxun, ZHOU Shenghua, and LIU Hongwei. Influence of target polarization scattering characteristics on the detection performance of polarization diversity radar[J]. Journal of Radars, 2019, 8(4): 510–518. doi: 10.12000/JR18112 [18] AN Wentao, CUI Yi, and YANG Jian. Three-component model-based decomposition for polarimetric SAR data[J]. IEEE Transactions on Geoscience and Remote Sensing, 2010, 48(6): 2732–2739. doi: 10.1109/TGRS.2010.2041242 [19] CLOUDE S R and POTTIER E. An entropy based classification scheme for land applications of polarimetric SAR[J]. IEEE Transactions on Geoscience and Remote Sensing, 1997, 35(1): 68–78. doi: 10.1109/36.551935 [20] AN Wentao, CUI Yi, ZHANG Weijie, et al. Data compression for multilook polarimetric SAR Data[J]. IEEE Geoscience and Remote Sensing Letters, 2009, 6(3): 476–480. doi: 10.1109/LGRS.2009.2017498 [21] KROGAGER E. New decomposition of the radar target scattering matrix[J]. Electronics Letters, 1990, 26(18): 1525–1527. doi: 10.1049/el:19900979 [22] KROGAGER E, BOERNER W M, and MADSEN S N. Feature-motivated Sinclair matrix (sphere/diplane/helix) decomposition and its application to target sorting for land feature classification[C]. The SPIE 3120, Wideband Interferometric Sensing and Imaging Polarimetry, San Diego, USA, 1997. doi: 10.1117/12.300620. [23] CHAMUNDEESWARI V V, SINGH D, and SINGH K. An analysis of texture measures in PCA-based unsupervised classification of SAR images[J]. IEEE Geoscience and Remote Sensing Letters, 2009, 6(2): 214–218. doi: 10.1109/LGRS.2008.2009954 [24] ZHANG Wei, DU Lan, LI Liling, et al. Infinite Bayesian one-class support vector machine based on Dirichlet process mixture clustering[J]. Pattern Recognition, 2018, 78: 56–78. doi: 10.1016/j.patcog.2018.01.006 [25] XU Huan and HUANG Deshuang. One class support vector machines for distinguishing photographs and graphics[C]. IEEE International Conference on Networking, Sensing and Control, Sanya, China, 2008. doi: 10.1109/ICNSC.2008.4525289. [26] CHO H W. Data description and noise filtering based detection with its application and performance comparison[J]. Expert Systems with Applications, 2009, 36(1): 434–441. doi: 10.1016/j.eswa.2007.09.053 [27] TIAN Jiang, GU Hong, GAO Chiyang, et al. Local density one-class support vector machines for anomaly detection[J]. Nonlinear Dynamics, 2011, 64(1/2): 127–130. doi: 10.1007/s11071-010-9851-y [28] BOUNSIAR A and MADDEN M G. Kernels for one-class support vector machines[C]. 2014 International Conference on Information Science & Applications (ICISA), Seoul, Republic of Korea, 2014. doi: 10.1109/ICISA.2014.6847419. -
















计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

