
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公2021年 10卷 第1期
 上一期
上一期
 摘要
摘要 9103KB
9103KB
摘要:
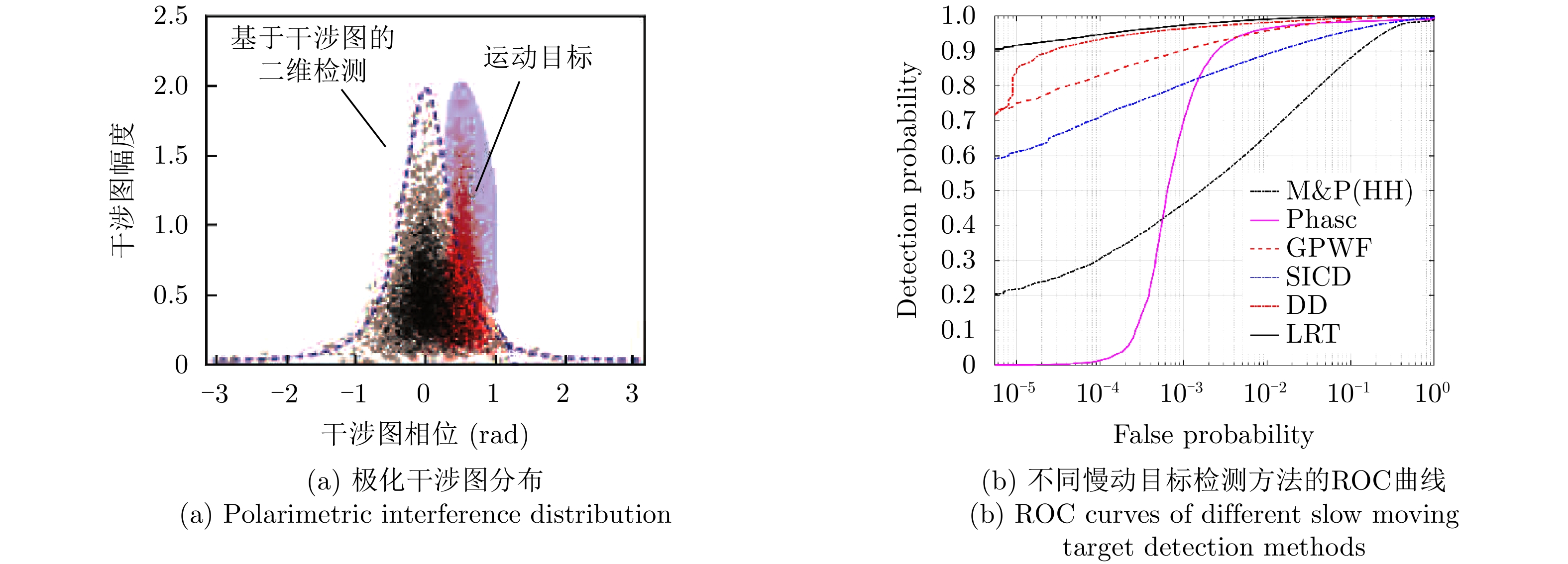
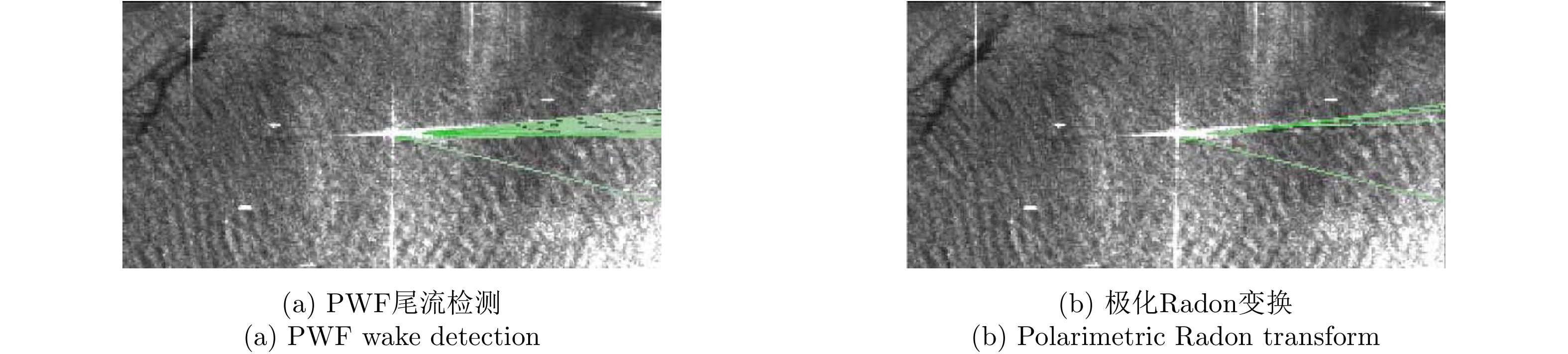
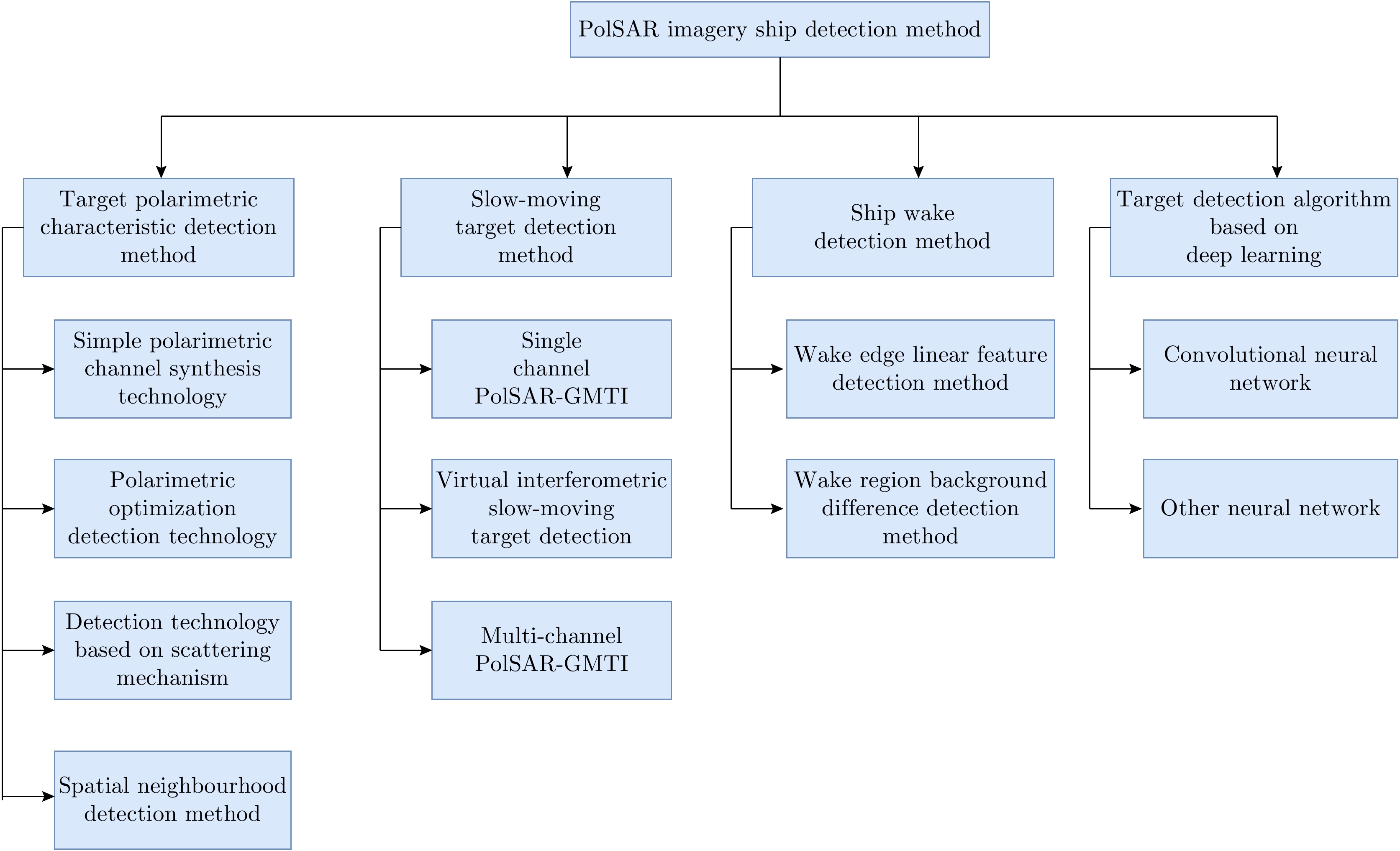
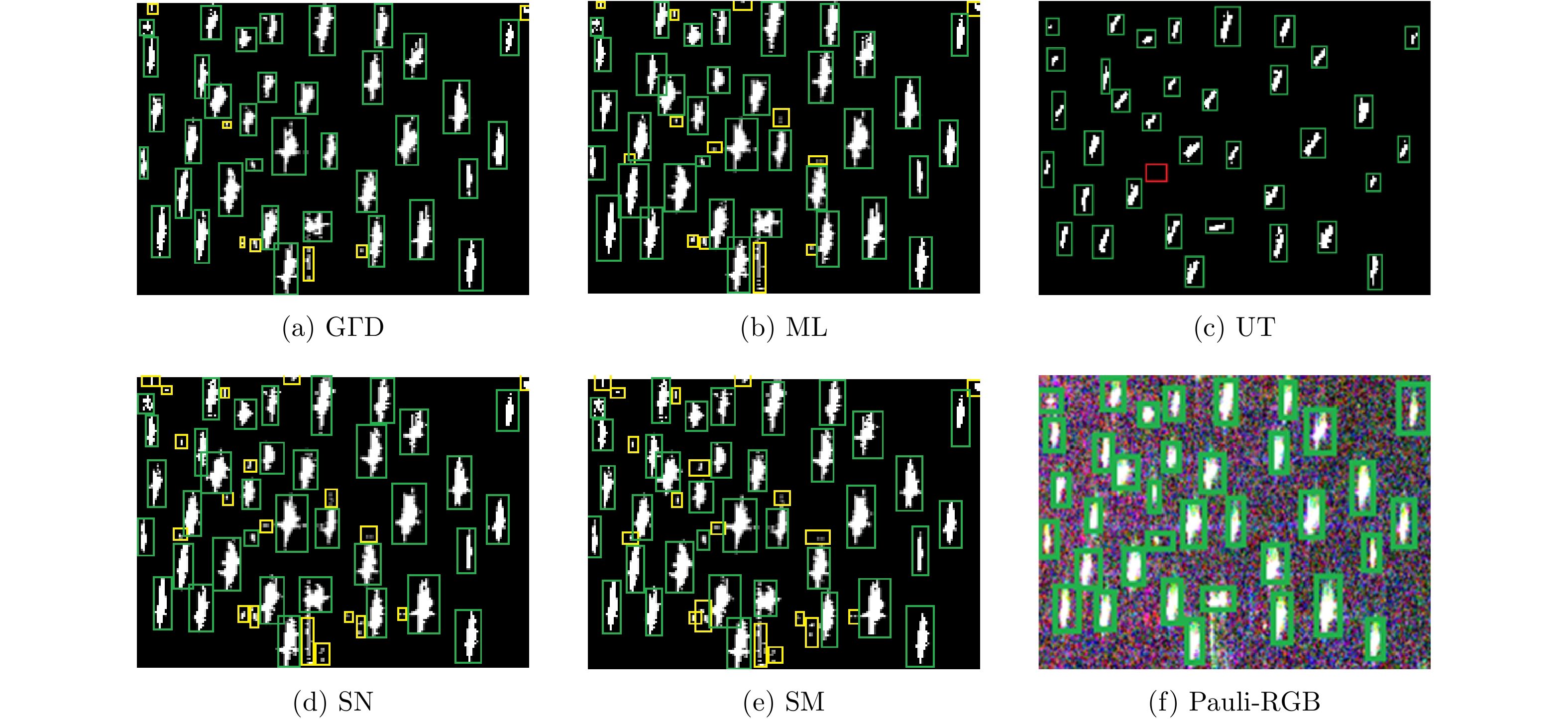
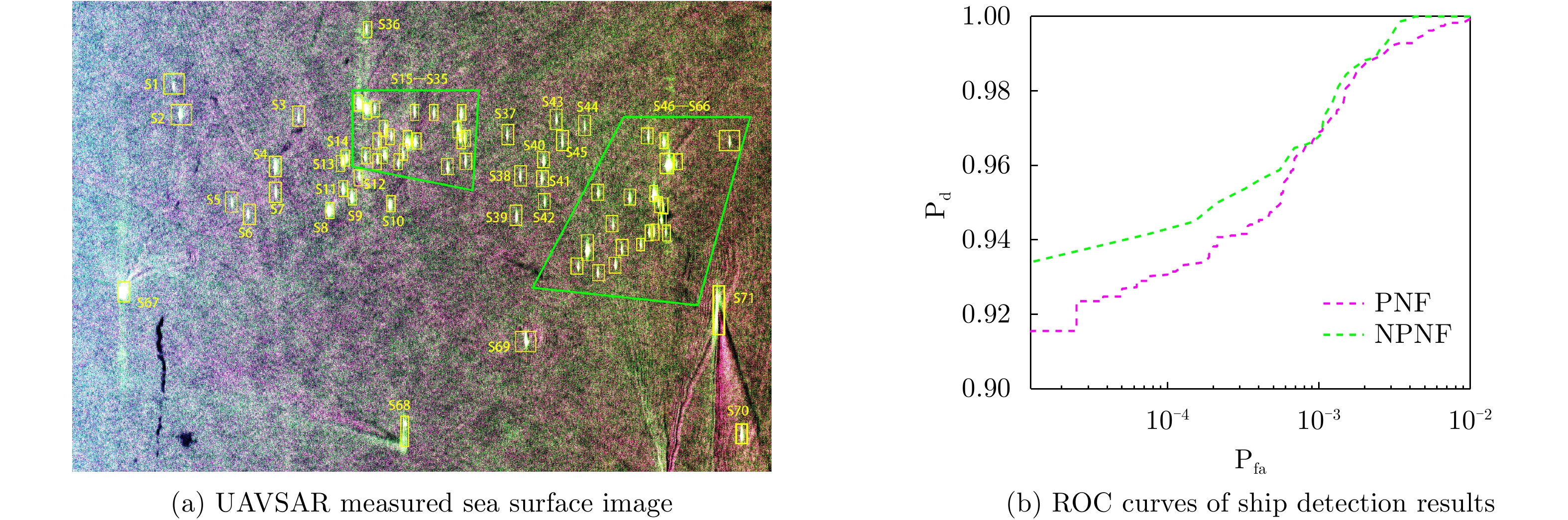
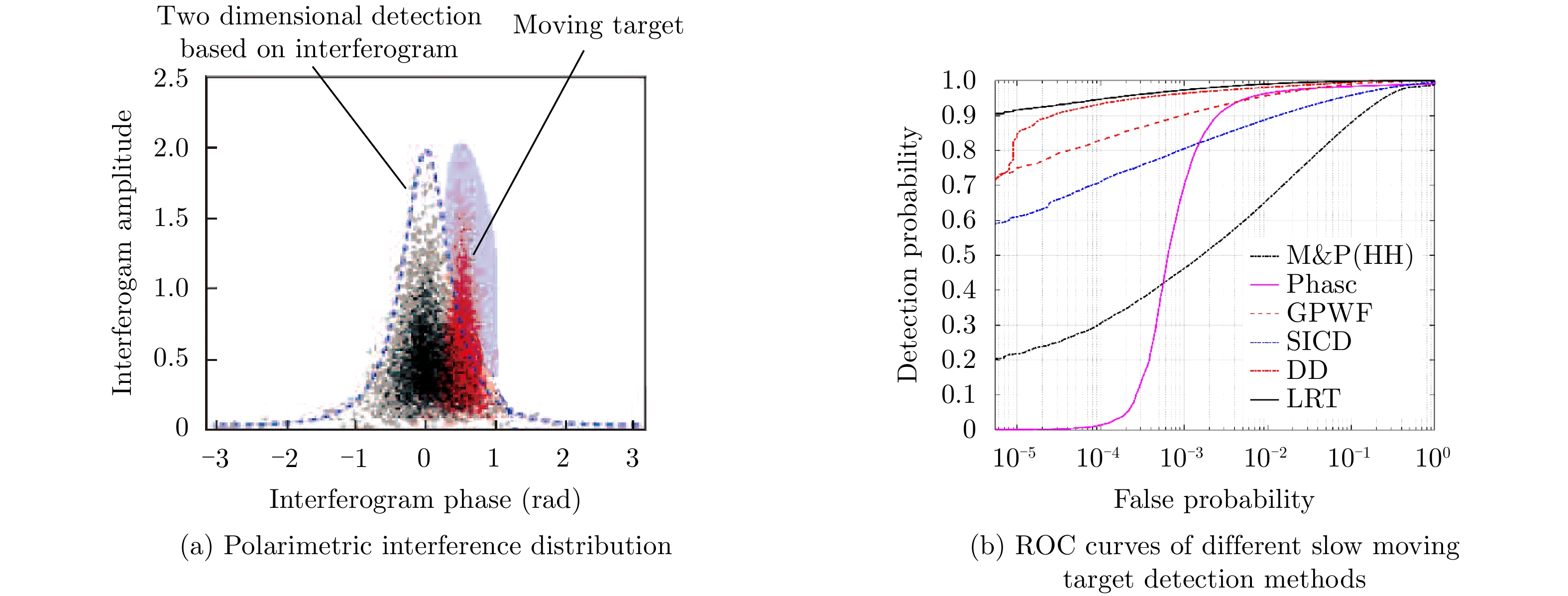
极化合成孔径雷达(PolSAR)使用二维脉冲压缩技术获取高分辨力极化信息图像,目前已广泛应用在军事侦察、地形测绘、环境与自然灾害监视、海上舰船目标检测等领域。如何解决复杂海杂波的建模与参数估计、慢小目标检测、密集目标检测等问题仍然是当前PolSAR图像舰船目标检测的难点。该文归纳梳理了PolSAR图像舰船目标检测的4类主流方法:极化特征目标检测方法、慢速运动目标检测方法、舰船目标尾迹检测方法以及基于深度学习的目标检测方法等,同时给出了各类方法所存在的问题以及可能的解决方法,并预测了其未来研究重点和发展趋势。 极化合成孔径雷达(PolSAR)使用二维脉冲压缩技术获取高分辨力极化信息图像,目前已广泛应用在军事侦察、地形测绘、环境与自然灾害监视、海上舰船目标检测等领域。如何解决复杂海杂波的建模与参数估计、慢小目标检测、密集目标检测等问题仍然是当前PolSAR图像舰船目标检测的难点。该文归纳梳理了PolSAR图像舰船目标检测的4类主流方法:极化特征目标检测方法、慢速运动目标检测方法、舰船目标尾迹检测方法以及基于深度学习的目标检测方法等,同时给出了各类方法所存在的问题以及可能的解决方法,并预测了其未来研究重点和发展趋势。
极化合成孔径雷达(PolSAR)使用二维脉冲压缩技术获取高分辨力极化信息图像,目前已广泛应用在军事侦察、地形测绘、环境与自然灾害监视、海上舰船目标检测等领域。如何解决复杂海杂波的建模与参数估计、慢小目标检测、密集目标检测等问题仍然是当前PolSAR图像舰船目标检测的难点。该文归纳梳理了PolSAR图像舰船目标检测的4类主流方法:极化特征目标检测方法、慢速运动目标检测方法、舰船目标尾迹检测方法以及基于深度学习的目标检测方法等,同时给出了各类方法所存在的问题以及可能的解决方法,并预测了其未来研究重点和发展趋势。 极化合成孔径雷达(PolSAR)使用二维脉冲压缩技术获取高分辨力极化信息图像,目前已广泛应用在军事侦察、地形测绘、环境与自然灾害监视、海上舰船目标检测等领域。如何解决复杂海杂波的建模与参数估计、慢小目标检测、密集目标检测等问题仍然是当前PolSAR图像舰船目标检测的难点。该文归纳梳理了PolSAR图像舰船目标检测的4类主流方法:极化特征目标检测方法、慢速运动目标检测方法、舰船目标尾迹检测方法以及基于深度学习的目标检测方法等,同时给出了各类方法所存在的问题以及可能的解决方法,并预测了其未来研究重点和发展趋势。
















2021, 10(1): 20-34.
摘要:
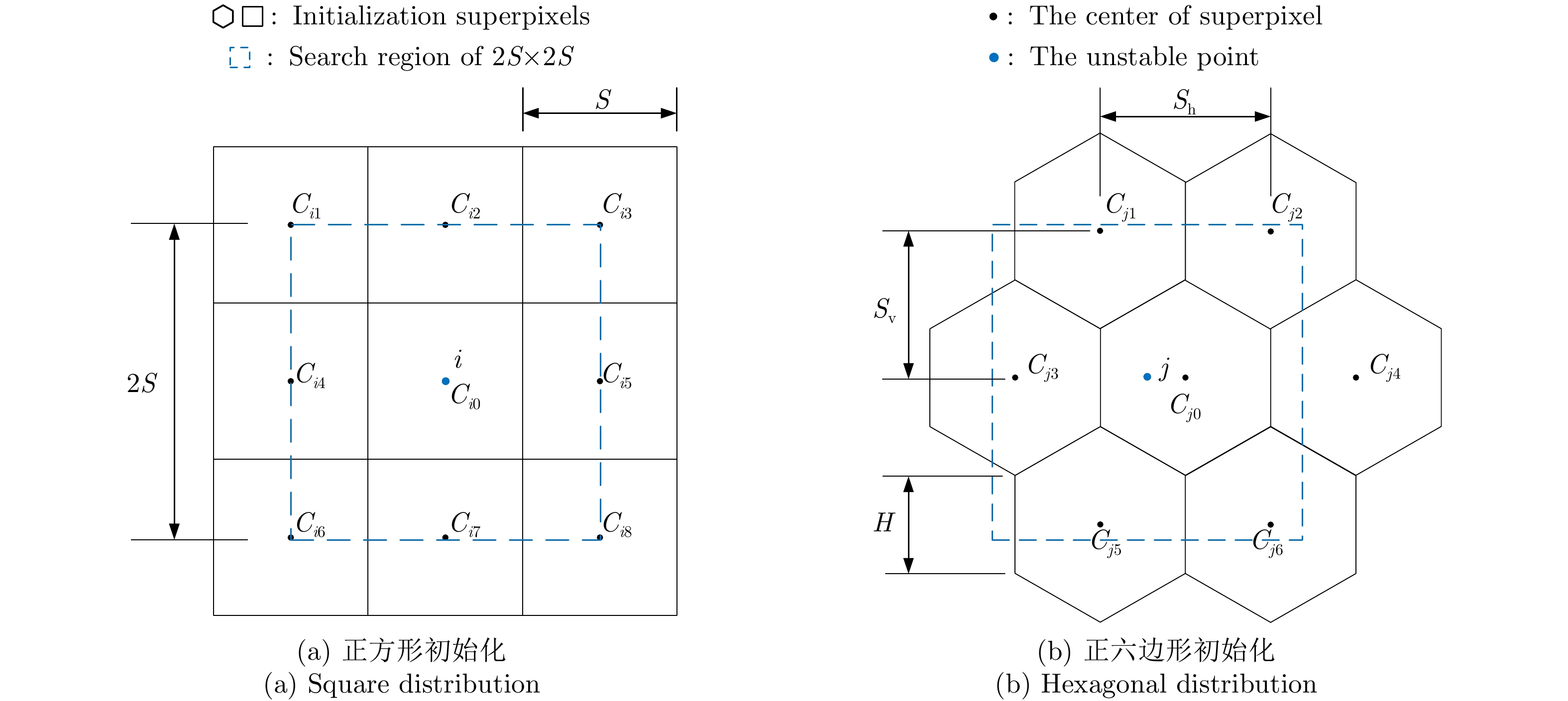
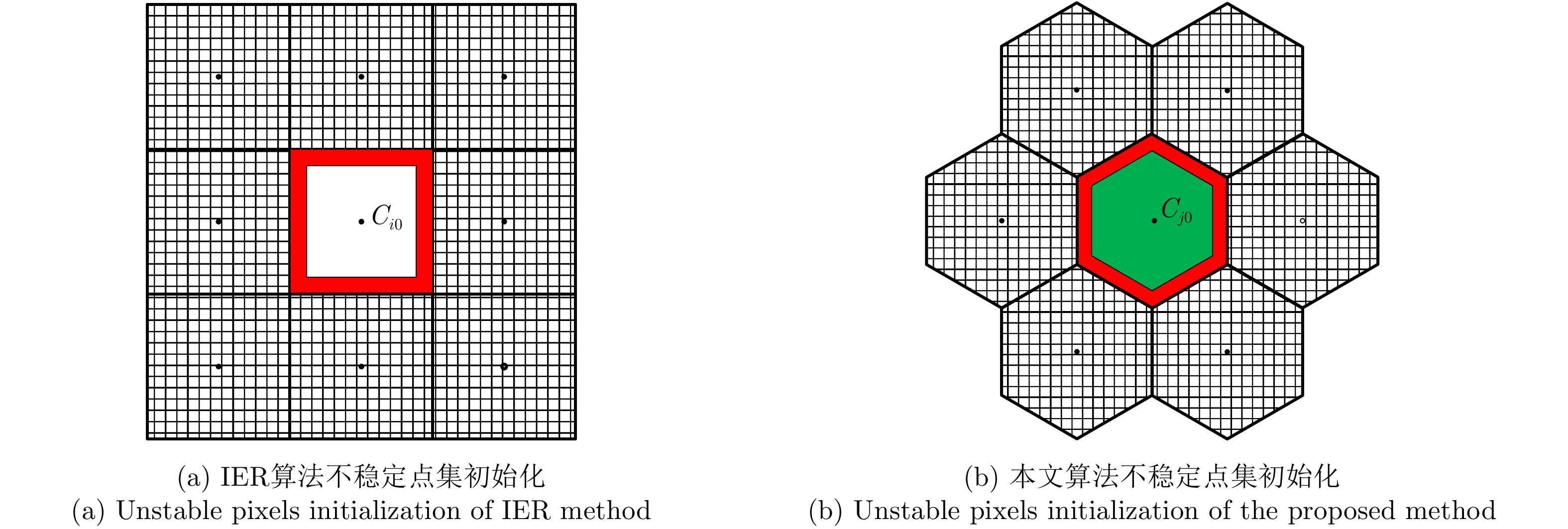
针对传统的极化SAR(PolSAR)图像超像素分割算法中采用的距离度量对相似性表征能力不足的问题,该文提出了一种基于测地线距离的极化SAR图像快速超像素分割算法。首先,对图像进行正六边形初始化与不稳定点初始化;其次,利用实对称Kennaugh矩阵之间的测地线距离来度量当前不稳定点与其搜索范围内其他聚类中心点之间的相似度,以便更准确地为当前不稳定点分配标签,从而快速减少不稳定点的数量;最后,利用后处理步骤消除孤立像素点以生成最终的超像素。利用仿真极化SAR数据验证了初始化方法的有效性和测地线距离度量的高效性,并利用仿真和实测数据将该文算法与其他4种算法进行对比分析。实验结果表明,该文方法生成的超像素具有更规则的形状并且能够准确地贴合真实地物边缘,同时具有更高的运算效率。 针对传统的极化SAR(PolSAR)图像超像素分割算法中采用的距离度量对相似性表征能力不足的问题,该文提出了一种基于测地线距离的极化SAR图像快速超像素分割算法。首先,对图像进行正六边形初始化与不稳定点初始化;其次,利用实对称Kennaugh矩阵之间的测地线距离来度量当前不稳定点与其搜索范围内其他聚类中心点之间的相似度,以便更准确地为当前不稳定点分配标签,从而快速减少不稳定点的数量;最后,利用后处理步骤消除孤立像素点以生成最终的超像素。利用仿真极化SAR数据验证了初始化方法的有效性和测地线距离度量的高效性,并利用仿真和实测数据将该文算法与其他4种算法进行对比分析。实验结果表明,该文方法生成的超像素具有更规则的形状并且能够准确地贴合真实地物边缘,同时具有更高的运算效率。
针对传统的极化SAR(PolSAR)图像超像素分割算法中采用的距离度量对相似性表征能力不足的问题,该文提出了一种基于测地线距离的极化SAR图像快速超像素分割算法。首先,对图像进行正六边形初始化与不稳定点初始化;其次,利用实对称Kennaugh矩阵之间的测地线距离来度量当前不稳定点与其搜索范围内其他聚类中心点之间的相似度,以便更准确地为当前不稳定点分配标签,从而快速减少不稳定点的数量;最后,利用后处理步骤消除孤立像素点以生成最终的超像素。利用仿真极化SAR数据验证了初始化方法的有效性和测地线距离度量的高效性,并利用仿真和实测数据将该文算法与其他4种算法进行对比分析。实验结果表明,该文方法生成的超像素具有更规则的形状并且能够准确地贴合真实地物边缘,同时具有更高的运算效率。 针对传统的极化SAR(PolSAR)图像超像素分割算法中采用的距离度量对相似性表征能力不足的问题,该文提出了一种基于测地线距离的极化SAR图像快速超像素分割算法。首先,对图像进行正六边形初始化与不稳定点初始化;其次,利用实对称Kennaugh矩阵之间的测地线距离来度量当前不稳定点与其搜索范围内其他聚类中心点之间的相似度,以便更准确地为当前不稳定点分配标签,从而快速减少不稳定点的数量;最后,利用后处理步骤消除孤立像素点以生成最终的超像素。利用仿真极化SAR数据验证了初始化方法的有效性和测地线距离度量的高效性,并利用仿真和实测数据将该文算法与其他4种算法进行对比分析。实验结果表明,该文方法生成的超像素具有更规则的形状并且能够准确地贴合真实地物边缘,同时具有更高的运算效率。











2021, 10(1): 35-48.
摘要:
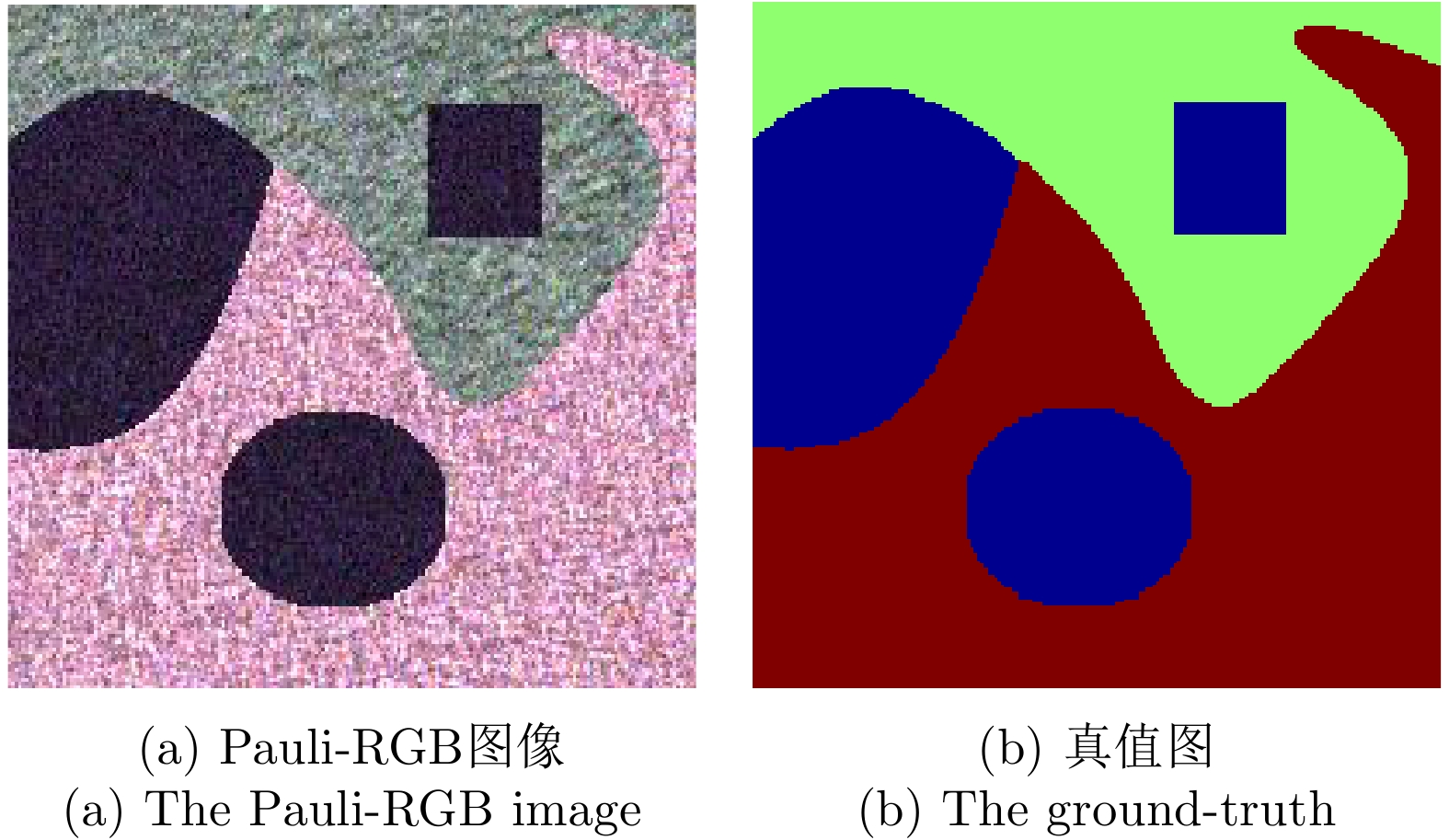
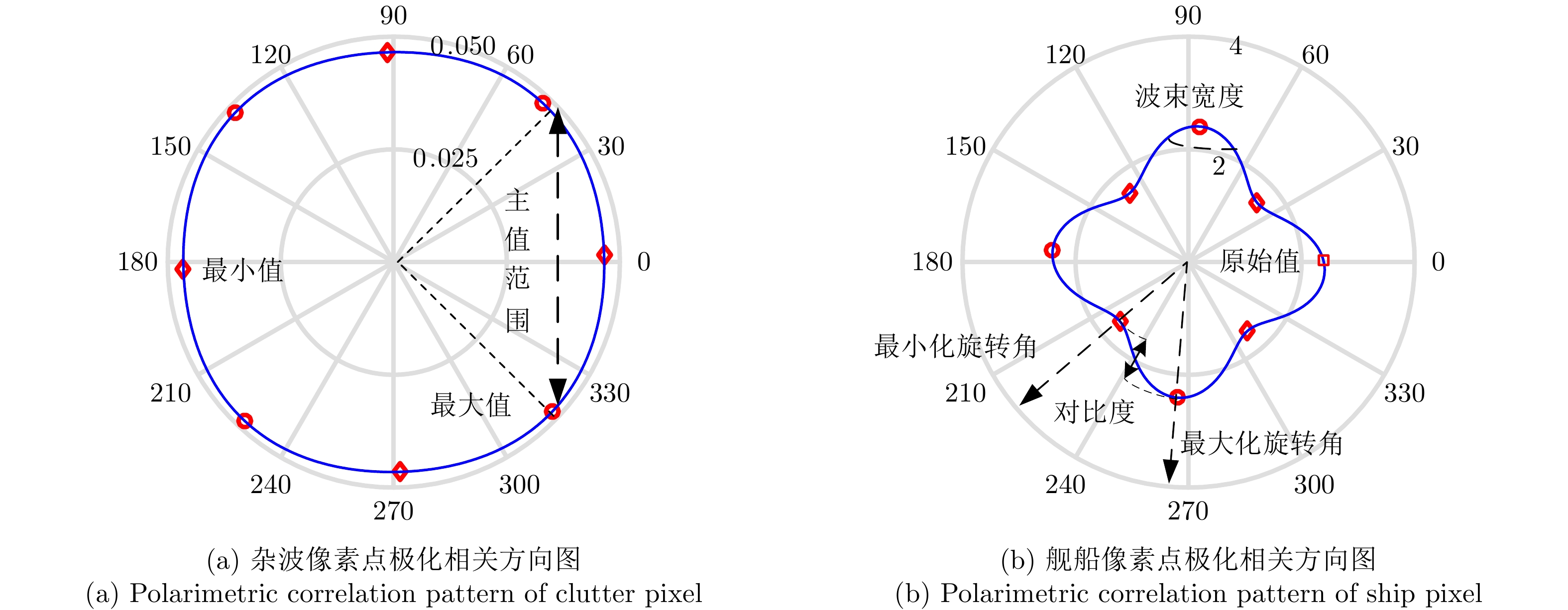
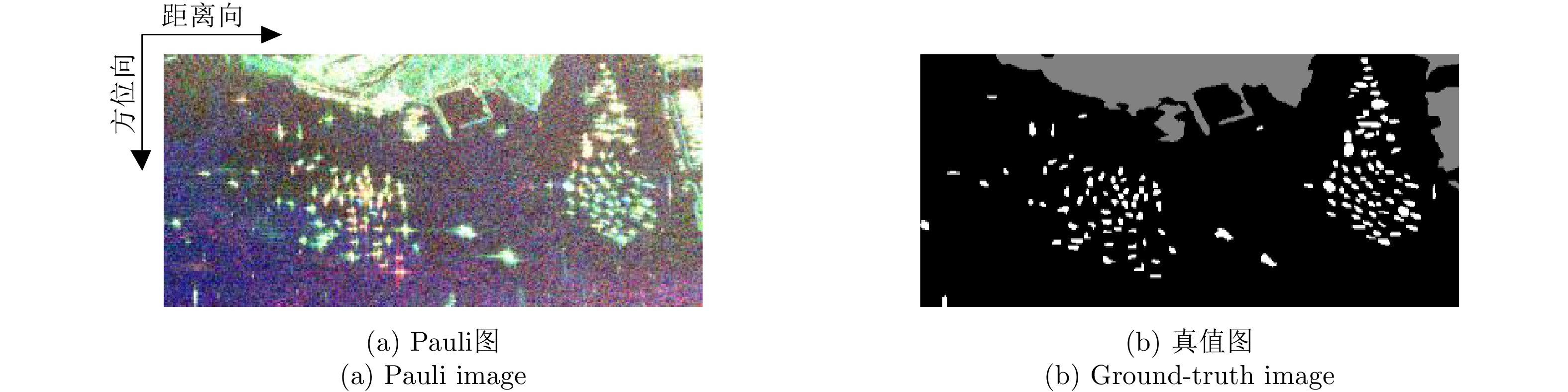
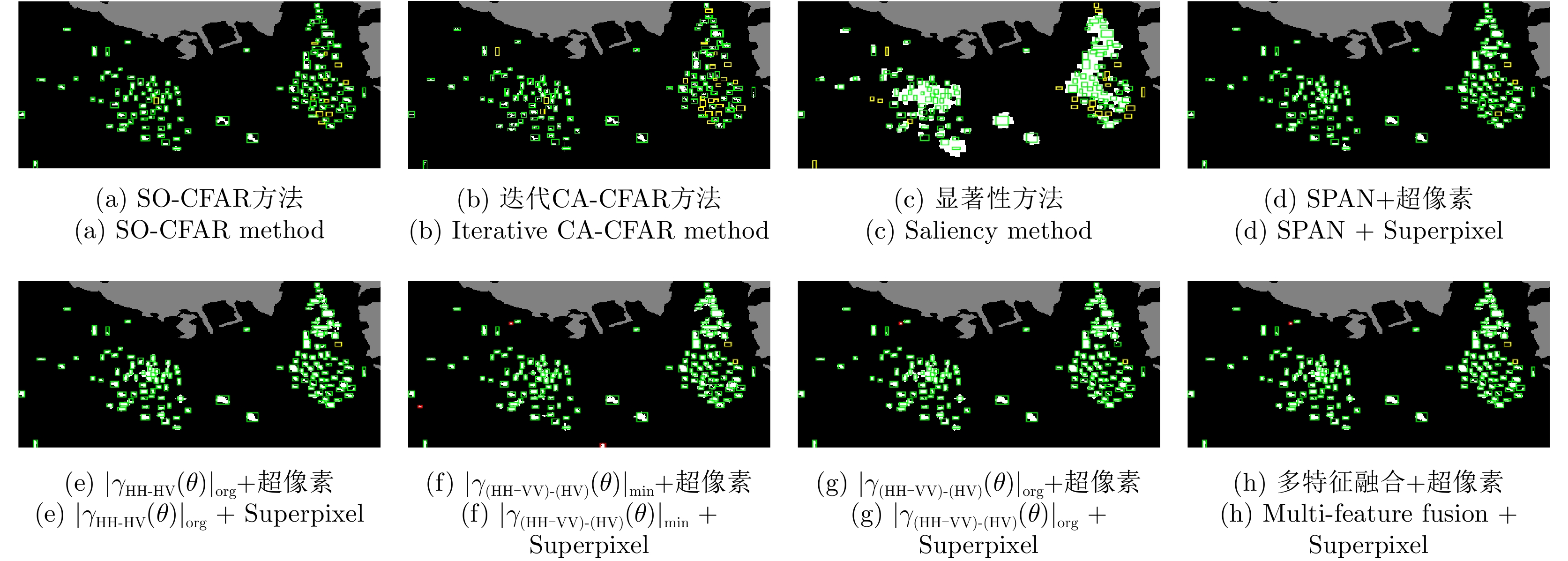
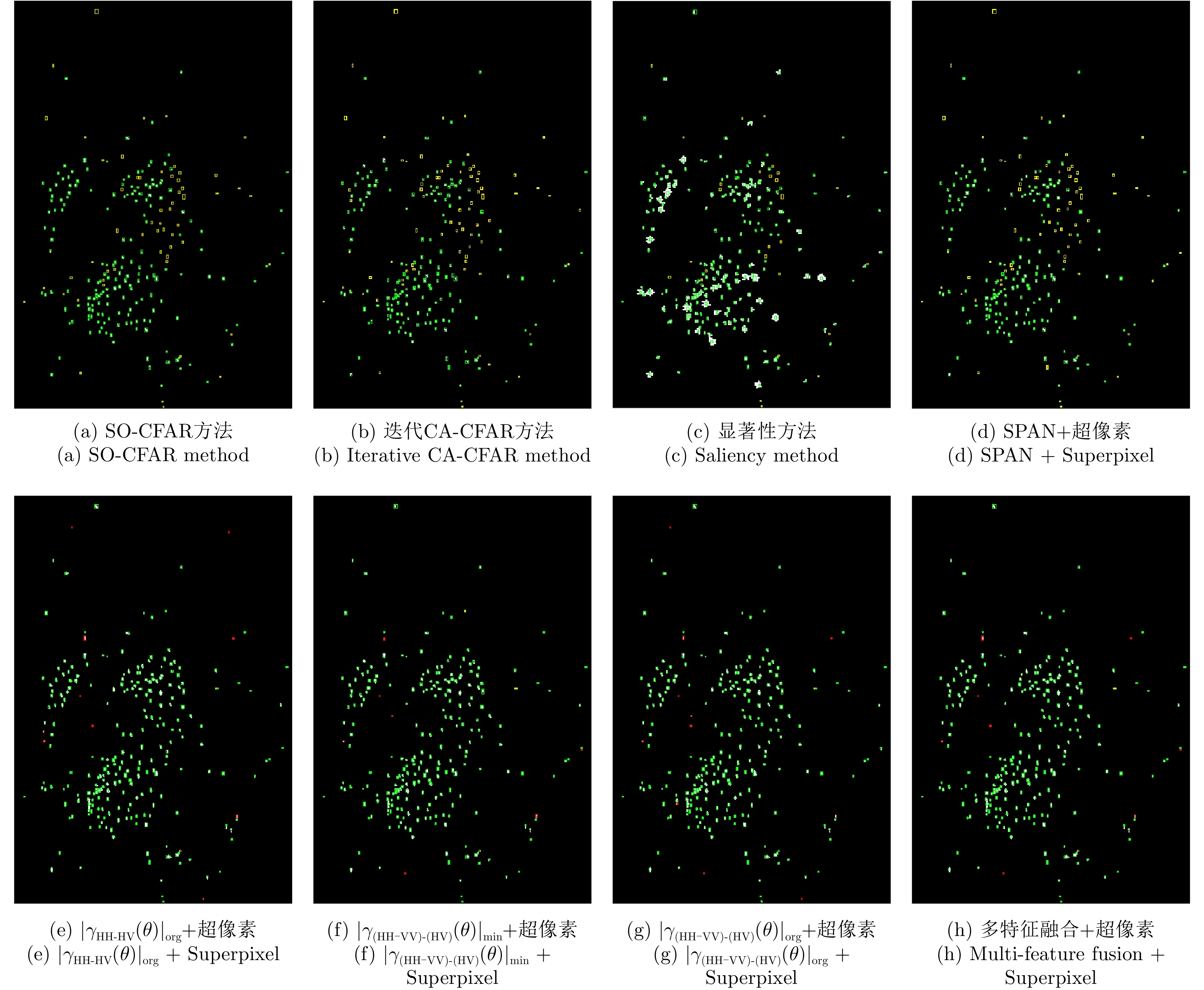
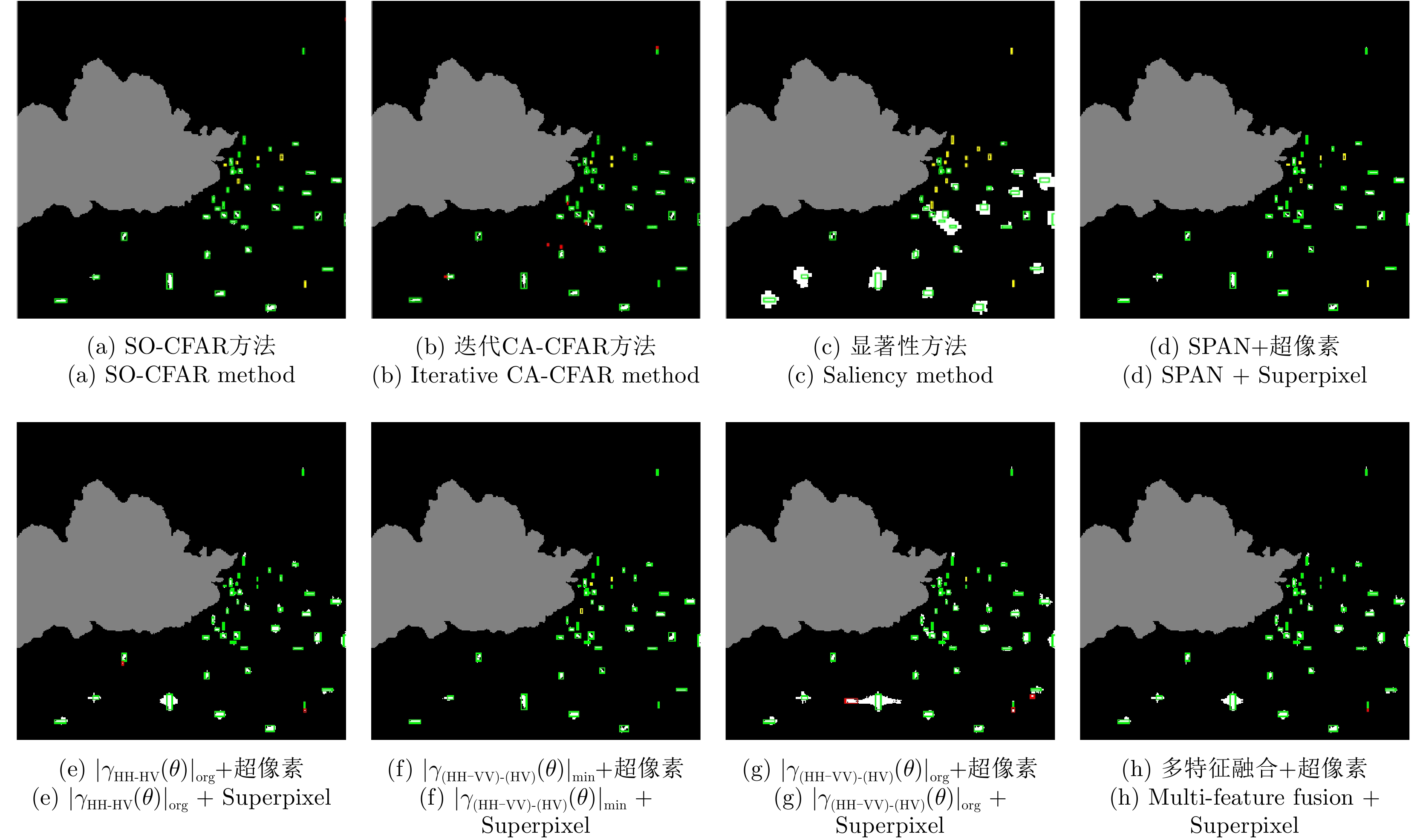
对海监视是极化SAR的重要应用,密集区域的舰船目标检测是当前面临的主要挑战之一。舰船密集区域受多目标串扰,传统的恒虚警率(CFAR)检测滑窗难以选取纯净的海杂波样本用于确定检测门限,将导致检测性能下降。针对这一问题,该文从特征提取和检测器设计两方面出发,提出一种融合极化旋转域特征和超像素技术的极化SAR舰船检测方法。在特征提取方面,雷达目标的后向散射敏感于目标姿态与雷达视线的相对几何关系,由此带来的散射多样性隐含信息可通过极化旋转域分析进行挖掘。该文利用极化相关方向图及导出的一系列极化旋转域特征,根据目标杂波比(TCR)分析,优选TCR最高的3个极化特征量用于构建目标检测器。在此基础上,该文在检测器设计方面提出了一种基于K均值聚类的杂波超像素筛选方法,有效避免了密集区域舰船目标对邻近杂波的影响,基于筛选的杂波像素点得到舰船目标CFAR检测结果。基于Radarsat-2和高分三号星载全极化SAR数据的对比实验表明,所提方法能有效实现密集区域舰船目标检测,检测品质因数达到95%。 对海监视是极化SAR的重要应用,密集区域的舰船目标检测是当前面临的主要挑战之一。舰船密集区域受多目标串扰,传统的恒虚警率(CFAR)检测滑窗难以选取纯净的海杂波样本用于确定检测门限,将导致检测性能下降。针对这一问题,该文从特征提取和检测器设计两方面出发,提出一种融合极化旋转域特征和超像素技术的极化SAR舰船检测方法。在特征提取方面,雷达目标的后向散射敏感于目标姿态与雷达视线的相对几何关系,由此带来的散射多样性隐含信息可通过极化旋转域分析进行挖掘。该文利用极化相关方向图及导出的一系列极化旋转域特征,根据目标杂波比(TCR)分析,优选TCR最高的3个极化特征量用于构建目标检测器。在此基础上,该文在检测器设计方面提出了一种基于K均值聚类的杂波超像素筛选方法,有效避免了密集区域舰船目标对邻近杂波的影响,基于筛选的杂波像素点得到舰船目标CFAR检测结果。基于Radarsat-2和高分三号星载全极化SAR数据的对比实验表明,所提方法能有效实现密集区域舰船目标检测,检测品质因数达到95%。
对海监视是极化SAR的重要应用,密集区域的舰船目标检测是当前面临的主要挑战之一。舰船密集区域受多目标串扰,传统的恒虚警率(CFAR)检测滑窗难以选取纯净的海杂波样本用于确定检测门限,将导致检测性能下降。针对这一问题,该文从特征提取和检测器设计两方面出发,提出一种融合极化旋转域特征和超像素技术的极化SAR舰船检测方法。在特征提取方面,雷达目标的后向散射敏感于目标姿态与雷达视线的相对几何关系,由此带来的散射多样性隐含信息可通过极化旋转域分析进行挖掘。该文利用极化相关方向图及导出的一系列极化旋转域特征,根据目标杂波比(TCR)分析,优选TCR最高的3个极化特征量用于构建目标检测器。在此基础上,该文在检测器设计方面提出了一种基于K均值聚类的杂波超像素筛选方法,有效避免了密集区域舰船目标对邻近杂波的影响,基于筛选的杂波像素点得到舰船目标CFAR检测结果。基于Radarsat-2和高分三号星载全极化SAR数据的对比实验表明,所提方法能有效实现密集区域舰船目标检测,检测品质因数达到95%。 对海监视是极化SAR的重要应用,密集区域的舰船目标检测是当前面临的主要挑战之一。舰船密集区域受多目标串扰,传统的恒虚警率(CFAR)检测滑窗难以选取纯净的海杂波样本用于确定检测门限,将导致检测性能下降。针对这一问题,该文从特征提取和检测器设计两方面出发,提出一种融合极化旋转域特征和超像素技术的极化SAR舰船检测方法。在特征提取方面,雷达目标的后向散射敏感于目标姿态与雷达视线的相对几何关系,由此带来的散射多样性隐含信息可通过极化旋转域分析进行挖掘。该文利用极化相关方向图及导出的一系列极化旋转域特征,根据目标杂波比(TCR)分析,优选TCR最高的3个极化特征量用于构建目标检测器。在此基础上,该文在检测器设计方面提出了一种基于K均值聚类的杂波超像素筛选方法,有效避免了密集区域舰船目标对邻近杂波的影响,基于筛选的杂波像素点得到舰船目标CFAR检测结果。基于Radarsat-2和高分三号星载全极化SAR数据的对比实验表明,所提方法能有效实现密集区域舰船目标检测,检测品质因数达到95%。





2021, 10(1): 49-60.
摘要:
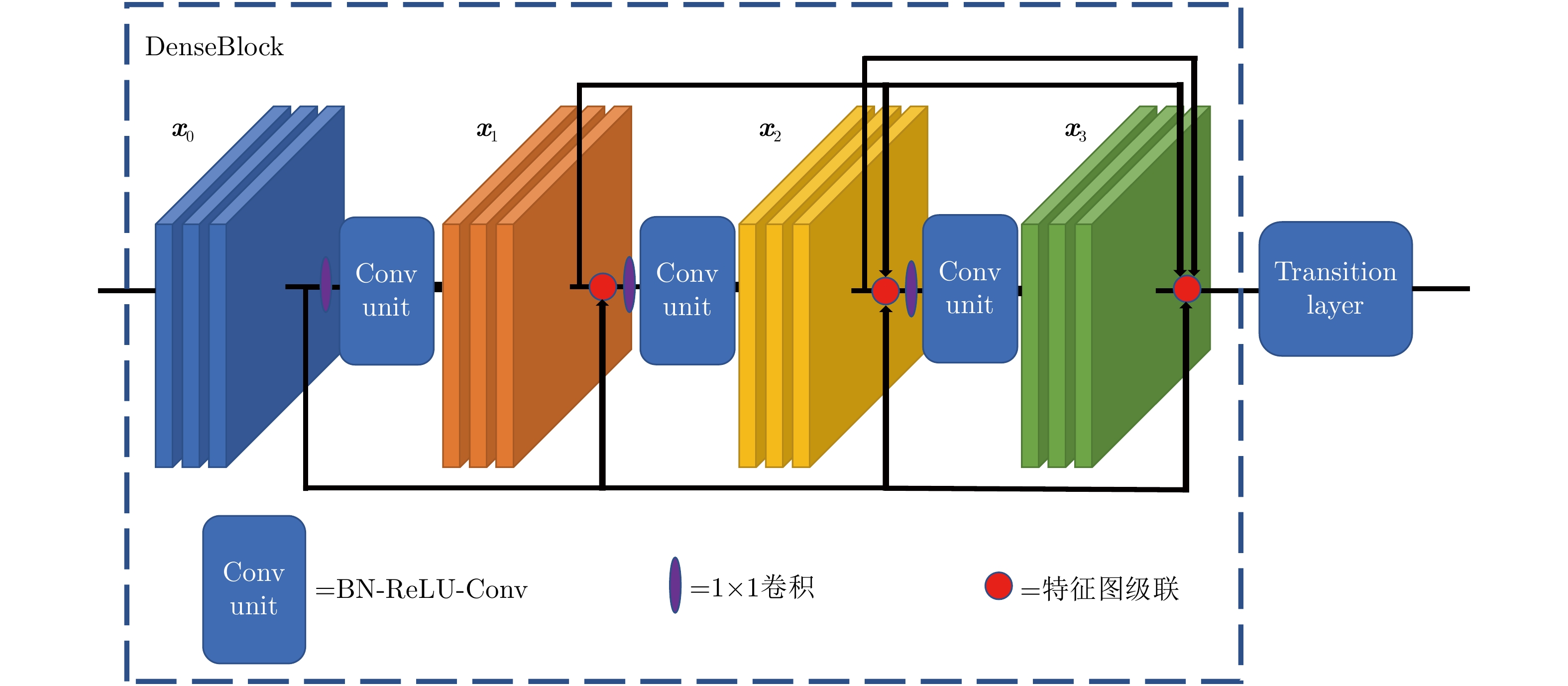
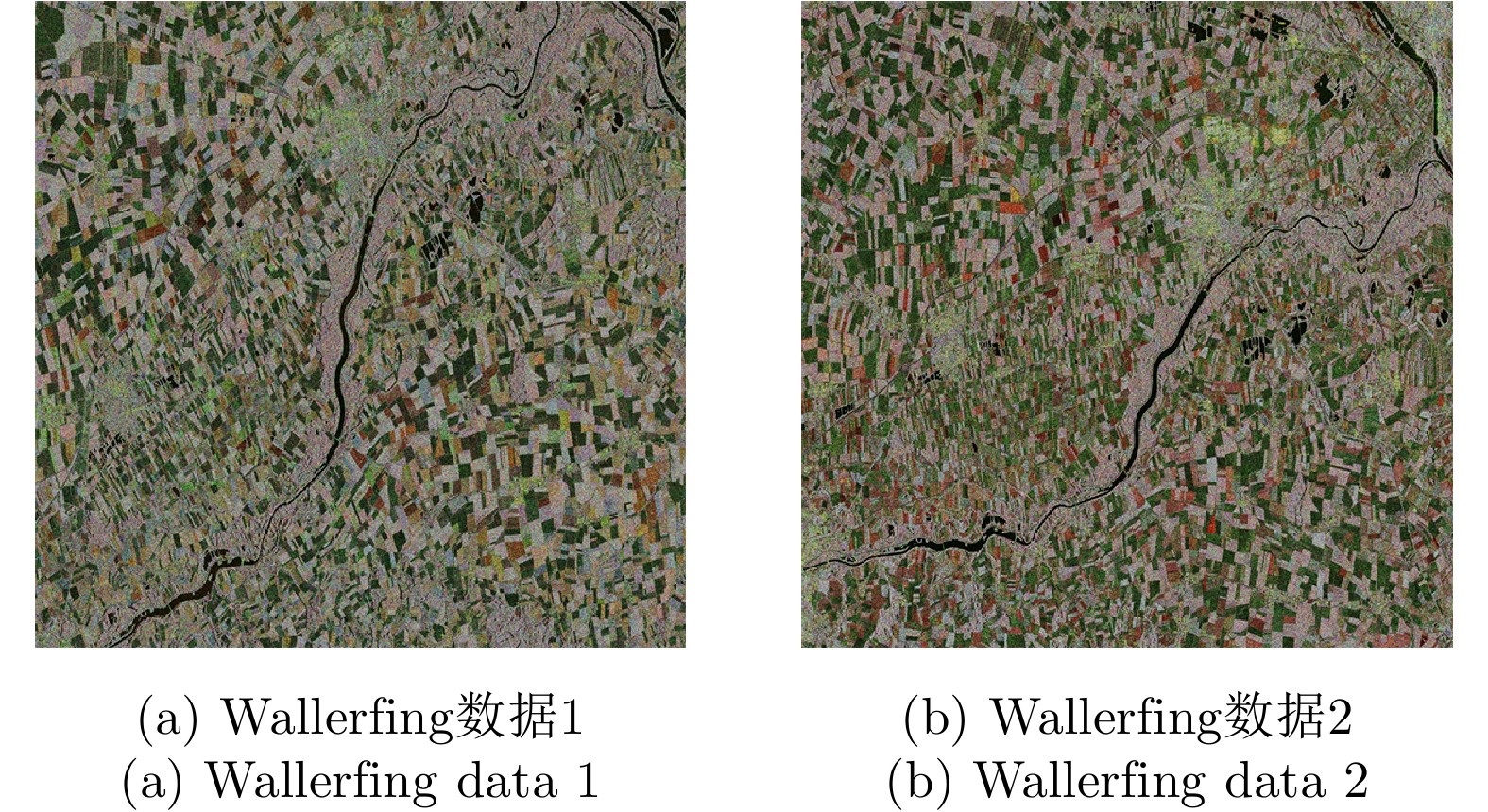
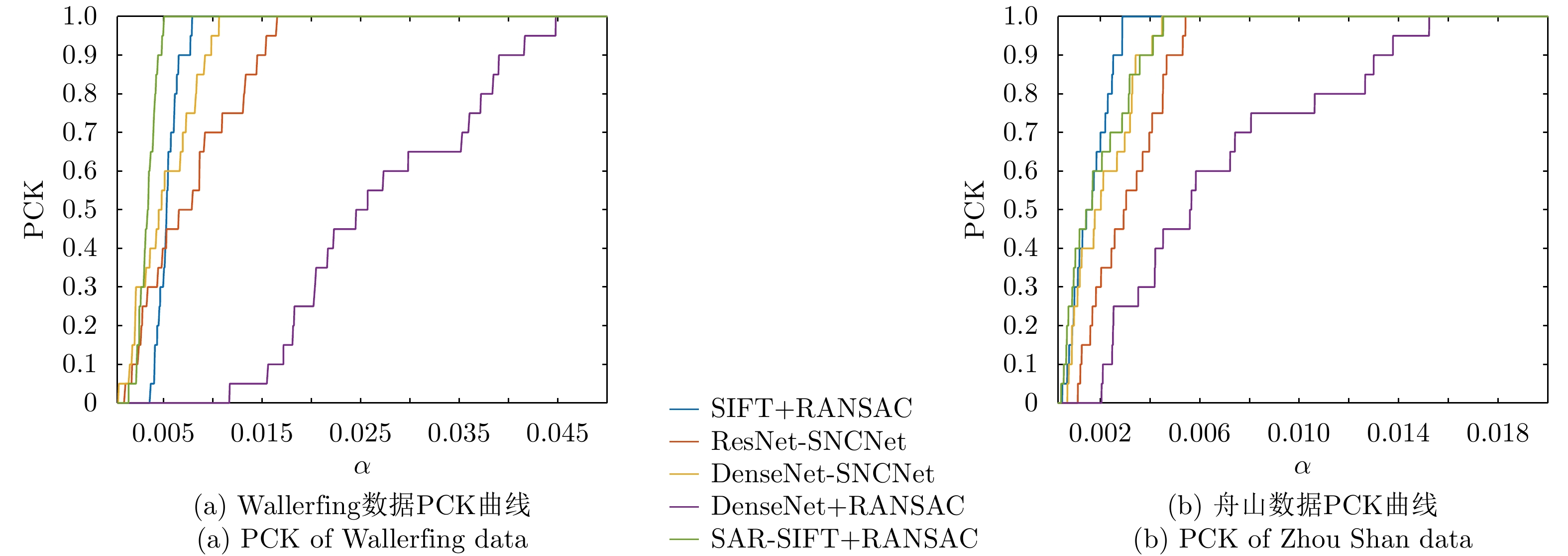
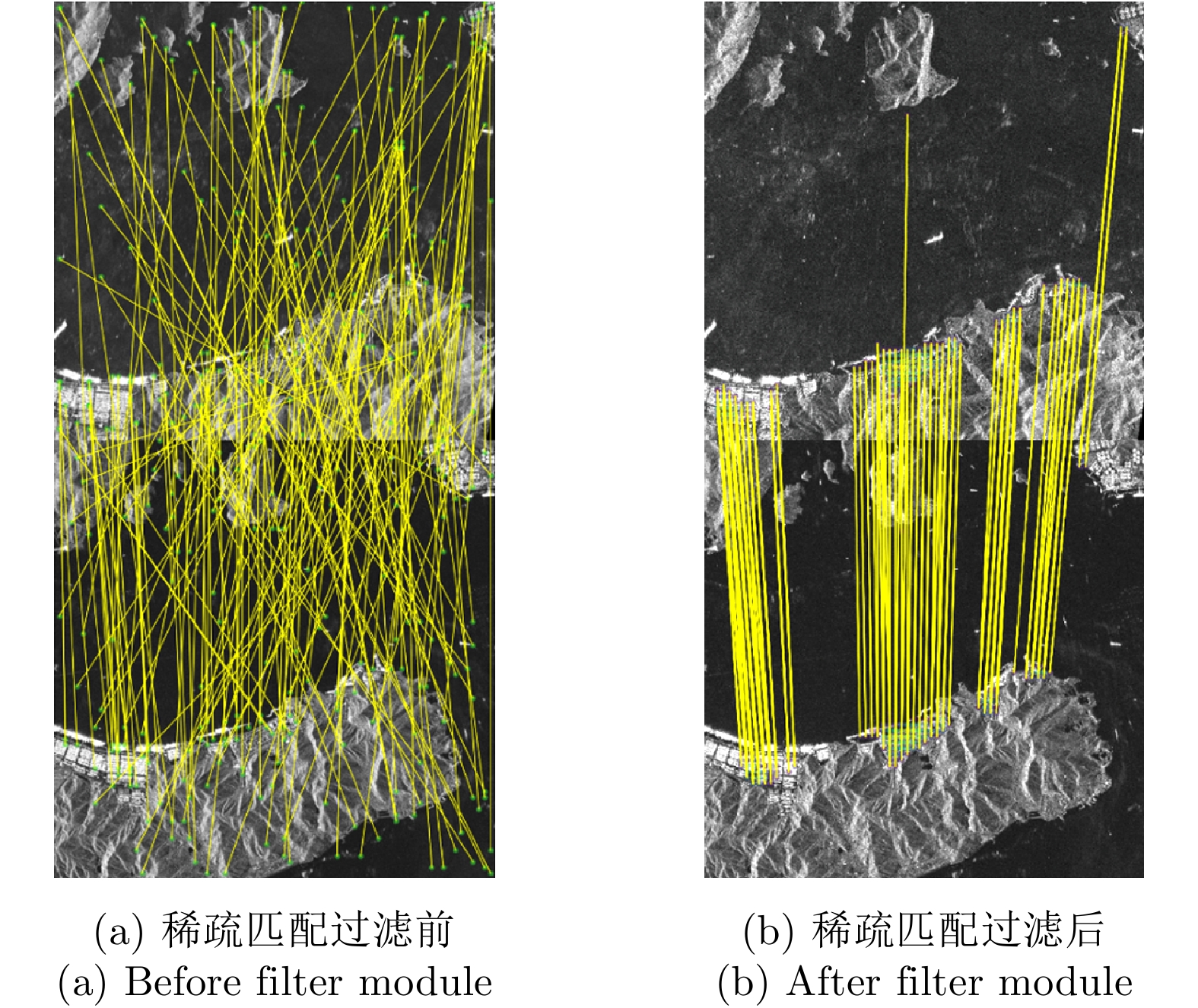
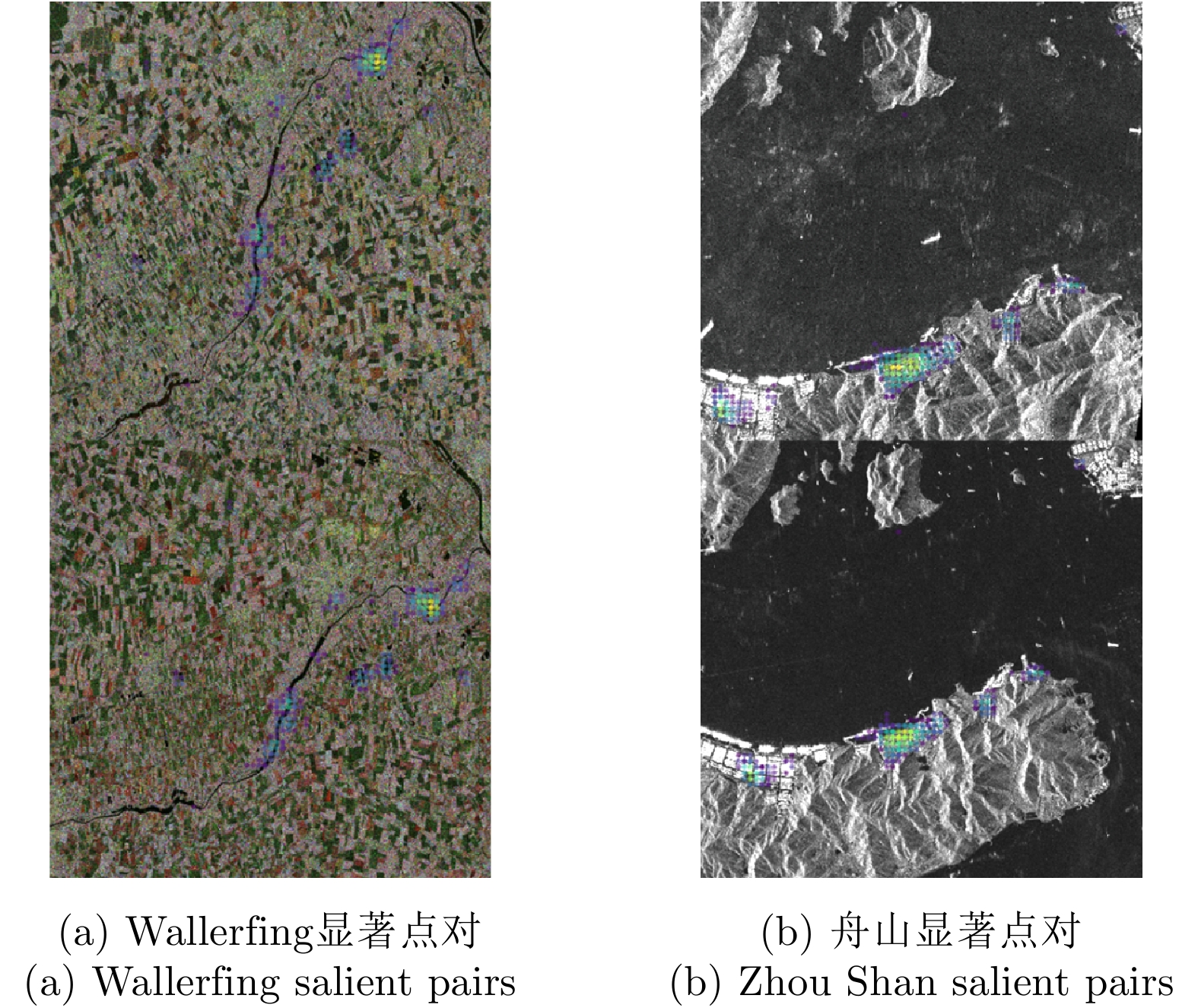
极化SAR图像的配准是极化SAR图像处理的基础,需要具备较高的精度与速度。基于深度学习的极化SAR图像配准大多数是结合图像块特征的匹配与基于随机抽样一致性的参数迭代估计来实现的。目前尚未实现端到端的基于深度卷积神经网络的一步仿射配准。该文提出了一种基于弱监督学习的端到端极化SAR图像配准框架,无需图像切块处理或迭代参数估计。首先,对输入图像对进行特征提取,得到密集的特征图。在此基础上,针对每个特征点保留k对相关度最高的特征点对。之后,将该4D稀疏特征匹配图输入4D稀疏卷积网络,基于邻域一致性进行特征匹配的过滤。最后,结合输出的匹配点对置信度,利用带权最小二乘法进行仿射参数回归,实现图像对的配准。该文采用RADARSAT-2卫星获取的德国Wallerfing地区农田数据以及PAZ卫星获取的中国舟山港口地区数据作为测试图像对。通过对升降轨、不同成像模式、不同极化方式、不同分辨率的极化SAR图像对的配准测试,并与4种现有方法进行对比,验证了该方法具有较高的配准精度与较快的速度。 极化SAR图像的配准是极化SAR图像处理的基础,需要具备较高的精度与速度。基于深度学习的极化SAR图像配准大多数是结合图像块特征的匹配与基于随机抽样一致性的参数迭代估计来实现的。目前尚未实现端到端的基于深度卷积神经网络的一步仿射配准。该文提出了一种基于弱监督学习的端到端极化SAR图像配准框架,无需图像切块处理或迭代参数估计。首先,对输入图像对进行特征提取,得到密集的特征图。在此基础上,针对每个特征点保留k对相关度最高的特征点对。之后,将该4D稀疏特征匹配图输入4D稀疏卷积网络,基于邻域一致性进行特征匹配的过滤。最后,结合输出的匹配点对置信度,利用带权最小二乘法进行仿射参数回归,实现图像对的配准。该文采用RADARSAT-2卫星获取的德国Wallerfing地区农田数据以及PAZ卫星获取的中国舟山港口地区数据作为测试图像对。通过对升降轨、不同成像模式、不同极化方式、不同分辨率的极化SAR图像对的配准测试,并与4种现有方法进行对比,验证了该方法具有较高的配准精度与较快的速度。
极化SAR图像的配准是极化SAR图像处理的基础,需要具备较高的精度与速度。基于深度学习的极化SAR图像配准大多数是结合图像块特征的匹配与基于随机抽样一致性的参数迭代估计来实现的。目前尚未实现端到端的基于深度卷积神经网络的一步仿射配准。该文提出了一种基于弱监督学习的端到端极化SAR图像配准框架,无需图像切块处理或迭代参数估计。首先,对输入图像对进行特征提取,得到密集的特征图。在此基础上,针对每个特征点保留k对相关度最高的特征点对。之后,将该4D稀疏特征匹配图输入4D稀疏卷积网络,基于邻域一致性进行特征匹配的过滤。最后,结合输出的匹配点对置信度,利用带权最小二乘法进行仿射参数回归,实现图像对的配准。该文采用RADARSAT-2卫星获取的德国Wallerfing地区农田数据以及PAZ卫星获取的中国舟山港口地区数据作为测试图像对。通过对升降轨、不同成像模式、不同极化方式、不同分辨率的极化SAR图像对的配准测试,并与4种现有方法进行对比,验证了该方法具有较高的配准精度与较快的速度。 极化SAR图像的配准是极化SAR图像处理的基础,需要具备较高的精度与速度。基于深度学习的极化SAR图像配准大多数是结合图像块特征的匹配与基于随机抽样一致性的参数迭代估计来实现的。目前尚未实现端到端的基于深度卷积神经网络的一步仿射配准。该文提出了一种基于弱监督学习的端到端极化SAR图像配准框架,无需图像切块处理或迭代参数估计。首先,对输入图像对进行特征提取,得到密集的特征图。在此基础上,针对每个特征点保留k对相关度最高的特征点对。之后,将该4D稀疏特征匹配图输入4D稀疏卷积网络,基于邻域一致性进行特征匹配的过滤。最后,结合输出的匹配点对置信度,利用带权最小二乘法进行仿射参数回归,实现图像对的配准。该文采用RADARSAT-2卫星获取的德国Wallerfing地区农田数据以及PAZ卫星获取的中国舟山港口地区数据作为测试图像对。通过对升降轨、不同成像模式、不同极化方式、不同分辨率的极化SAR图像对的配准测试,并与4种现有方法进行对比,验证了该方法具有较高的配准精度与较快的速度。





2021, 10(1): 61-73.
摘要:
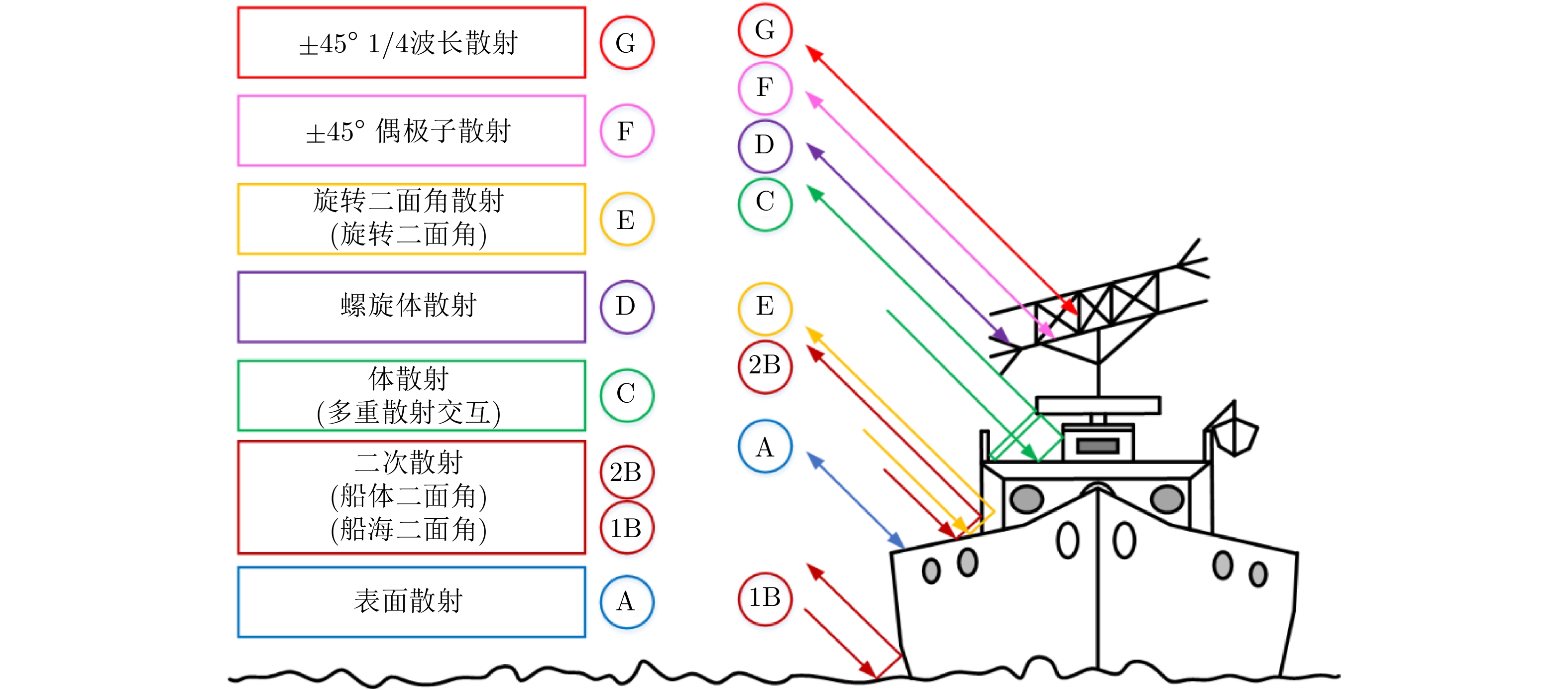
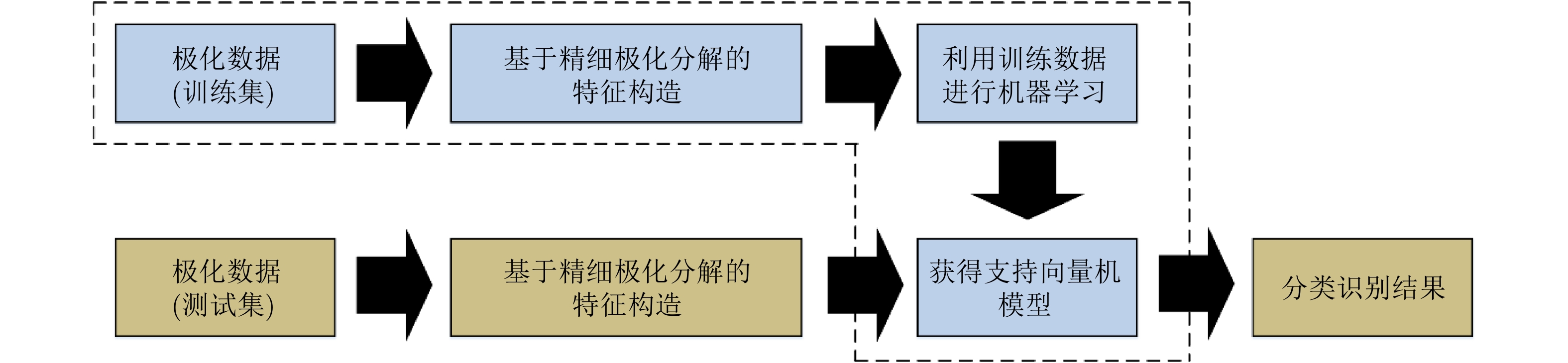
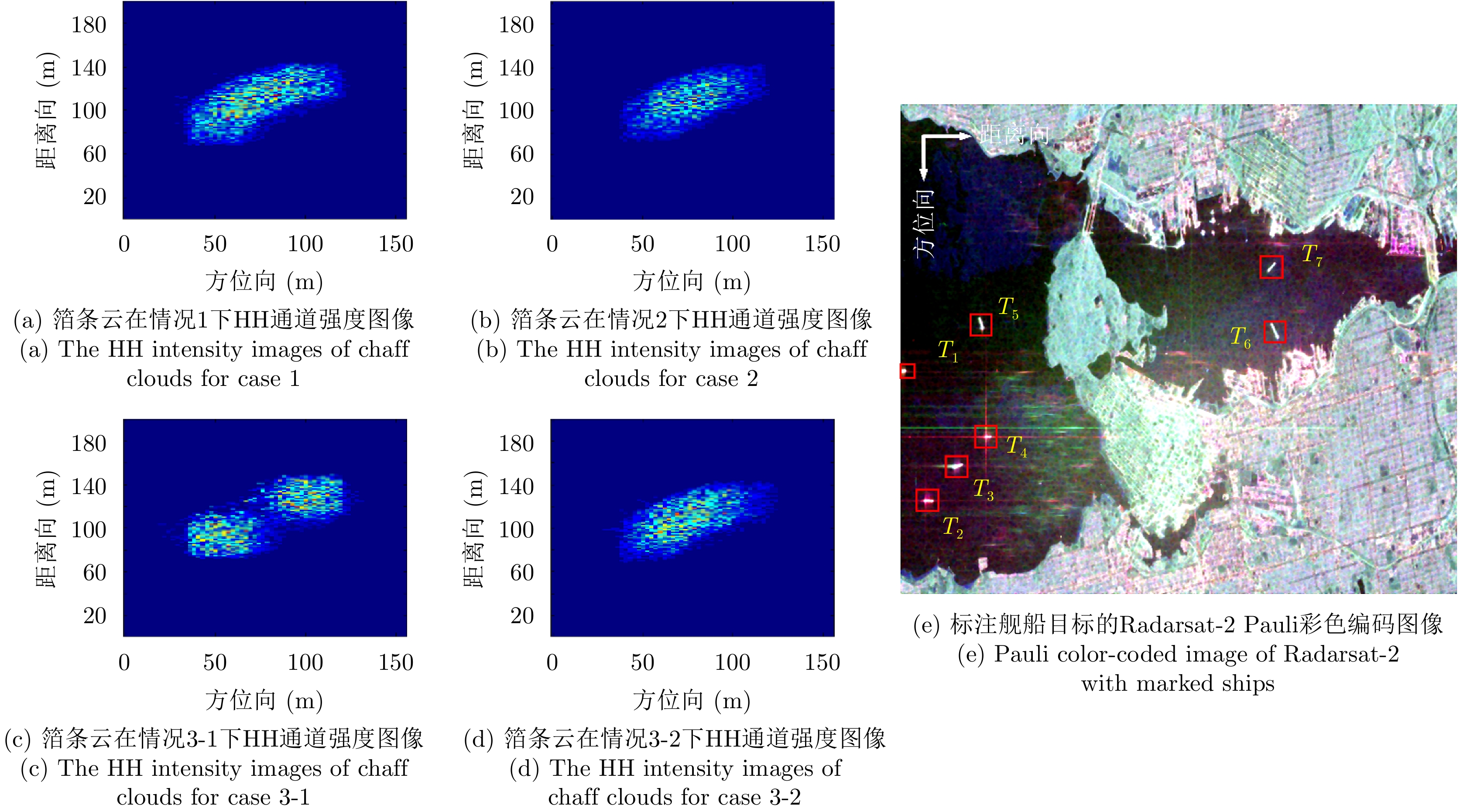
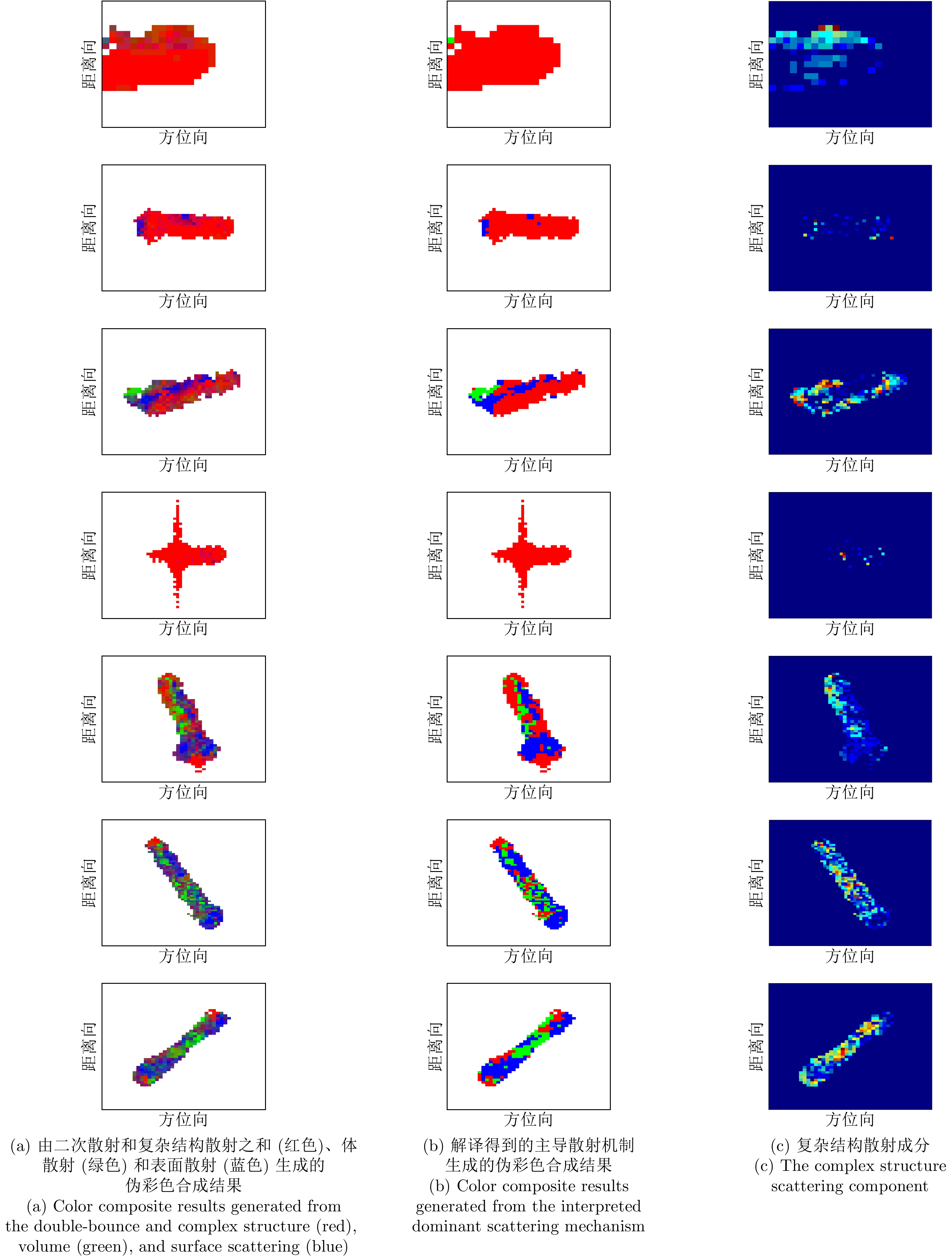
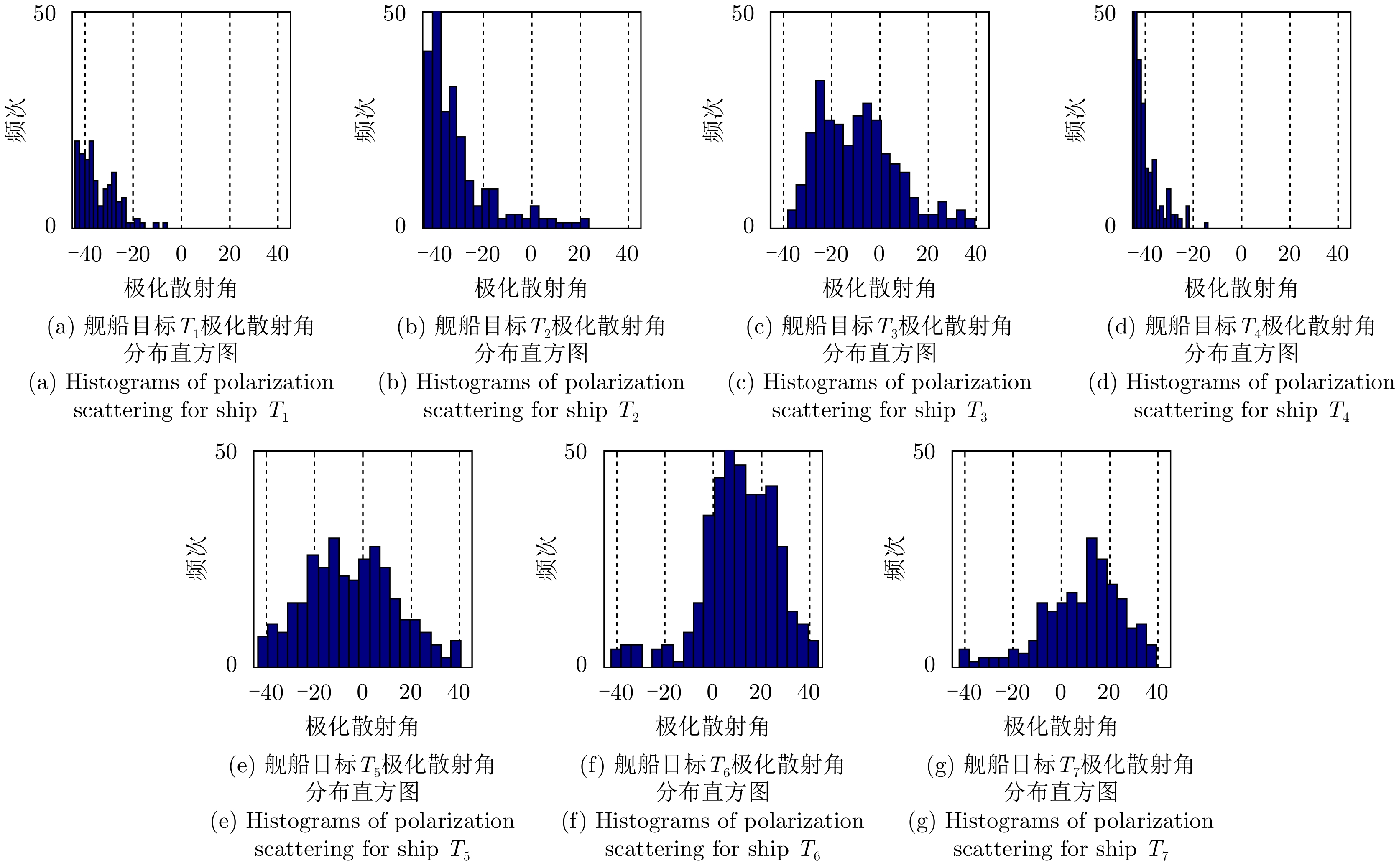
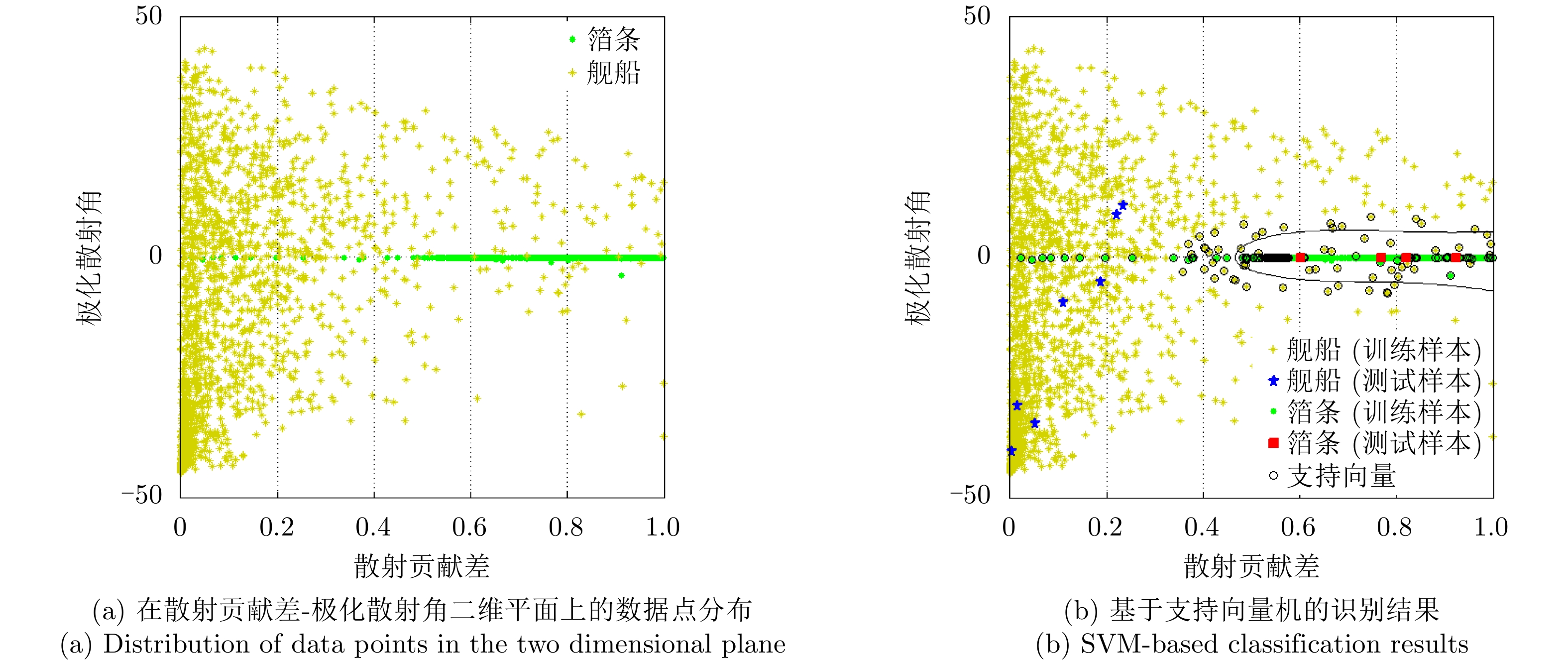
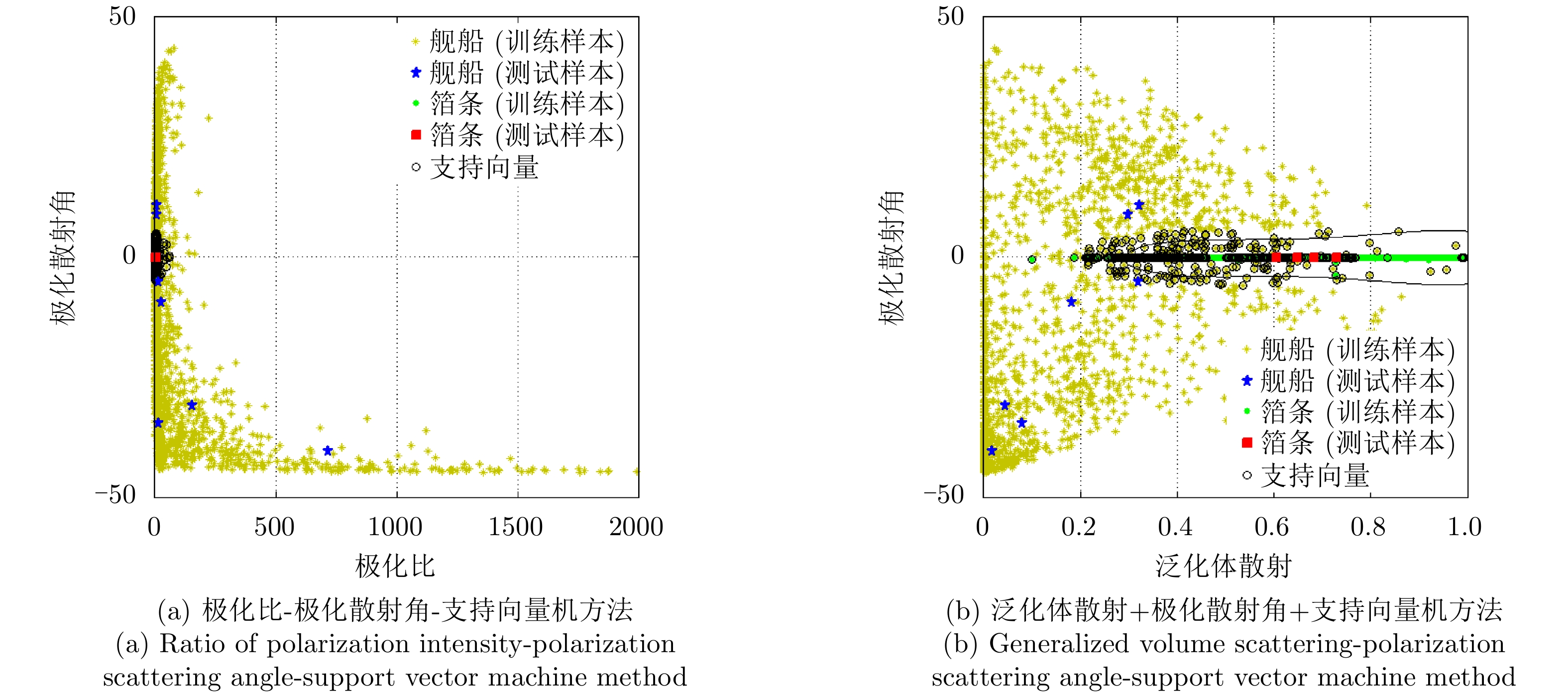
用于干扰舰船目标的箔条云通常具有与舰船目标相近的尺寸和雷达散射截面积,这使得舰船与箔条云的识别成为一个非常有挑战性的问题。该文提出一种基于精细极化目标分解的识别方法。为了能够有效地识别舰船目标与箔条云,该文首先结合3种精细化散射模型,提出了一种基于精细散射模型的七成分分解方法。通过这种分解方法可以有效地刻画舰船目标的散射特性。为了将舰船与箔条云的极化特性进行有效的对比和区分,该文根据分解得到的散射成分贡献构造了一个稳健的散射贡献差特征。最后,通过将构造的散射贡献差与极化散射角结合,构造了新的特征矢量并利用支持向量机实现了最终的识别。实验利用仿真和实测的极化雷达数据对所提方法进行了验证,结果表明该方法优于现有的其他方法,并能够达到最高98%的正确识别率。 用于干扰舰船目标的箔条云通常具有与舰船目标相近的尺寸和雷达散射截面积,这使得舰船与箔条云的识别成为一个非常有挑战性的问题。该文提出一种基于精细极化目标分解的识别方法。为了能够有效地识别舰船目标与箔条云,该文首先结合3种精细化散射模型,提出了一种基于精细散射模型的七成分分解方法。通过这种分解方法可以有效地刻画舰船目标的散射特性。为了将舰船与箔条云的极化特性进行有效的对比和区分,该文根据分解得到的散射成分贡献构造了一个稳健的散射贡献差特征。最后,通过将构造的散射贡献差与极化散射角结合,构造了新的特征矢量并利用支持向量机实现了最终的识别。实验利用仿真和实测的极化雷达数据对所提方法进行了验证,结果表明该方法优于现有的其他方法,并能够达到最高98%的正确识别率。
用于干扰舰船目标的箔条云通常具有与舰船目标相近的尺寸和雷达散射截面积,这使得舰船与箔条云的识别成为一个非常有挑战性的问题。该文提出一种基于精细极化目标分解的识别方法。为了能够有效地识别舰船目标与箔条云,该文首先结合3种精细化散射模型,提出了一种基于精细散射模型的七成分分解方法。通过这种分解方法可以有效地刻画舰船目标的散射特性。为了将舰船与箔条云的极化特性进行有效的对比和区分,该文根据分解得到的散射成分贡献构造了一个稳健的散射贡献差特征。最后,通过将构造的散射贡献差与极化散射角结合,构造了新的特征矢量并利用支持向量机实现了最终的识别。实验利用仿真和实测的极化雷达数据对所提方法进行了验证,结果表明该方法优于现有的其他方法,并能够达到最高98%的正确识别率。 用于干扰舰船目标的箔条云通常具有与舰船目标相近的尺寸和雷达散射截面积,这使得舰船与箔条云的识别成为一个非常有挑战性的问题。该文提出一种基于精细极化目标分解的识别方法。为了能够有效地识别舰船目标与箔条云,该文首先结合3种精细化散射模型,提出了一种基于精细散射模型的七成分分解方法。通过这种分解方法可以有效地刻画舰船目标的散射特性。为了将舰船与箔条云的极化特性进行有效的对比和区分,该文根据分解得到的散射成分贡献构造了一个稳健的散射贡献差特征。最后,通过将构造的散射贡献差与极化散射角结合,构造了新的特征矢量并利用支持向量机实现了最终的识别。实验利用仿真和实测的极化雷达数据对所提方法进行了验证,结果表明该方法优于现有的其他方法,并能够达到最高98%的正确识别率。



2021, 10(1): 74-85.
摘要:
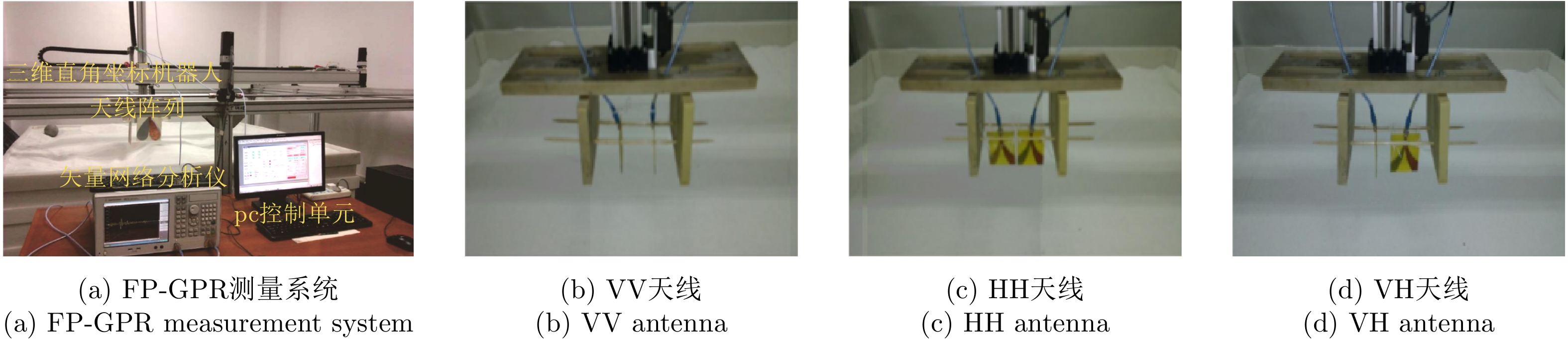
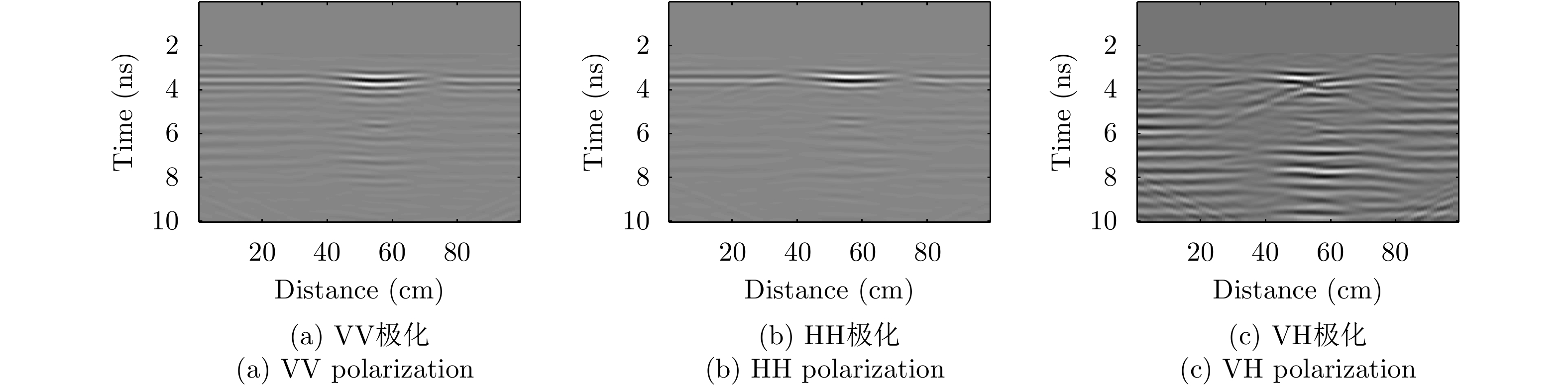
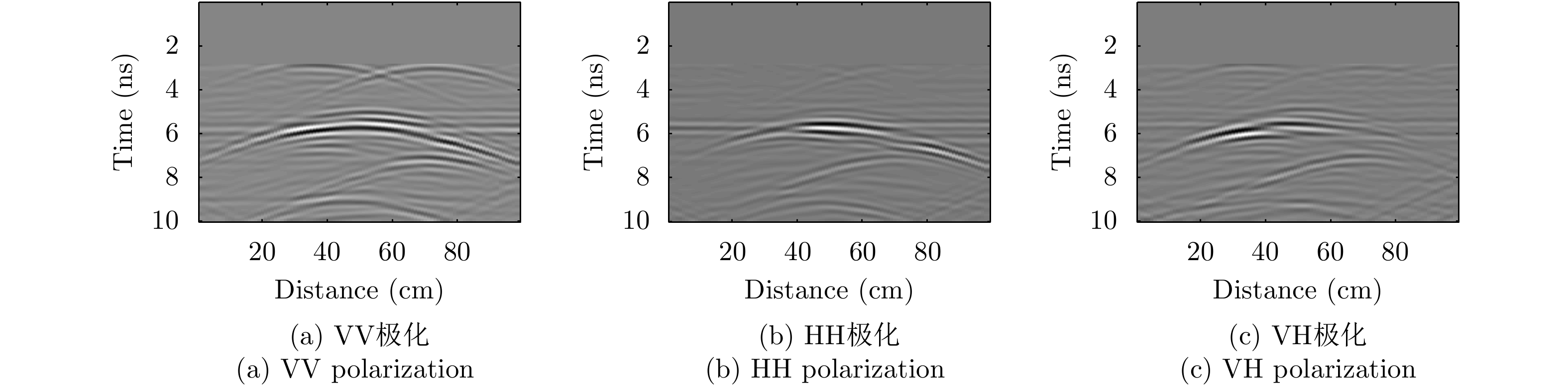
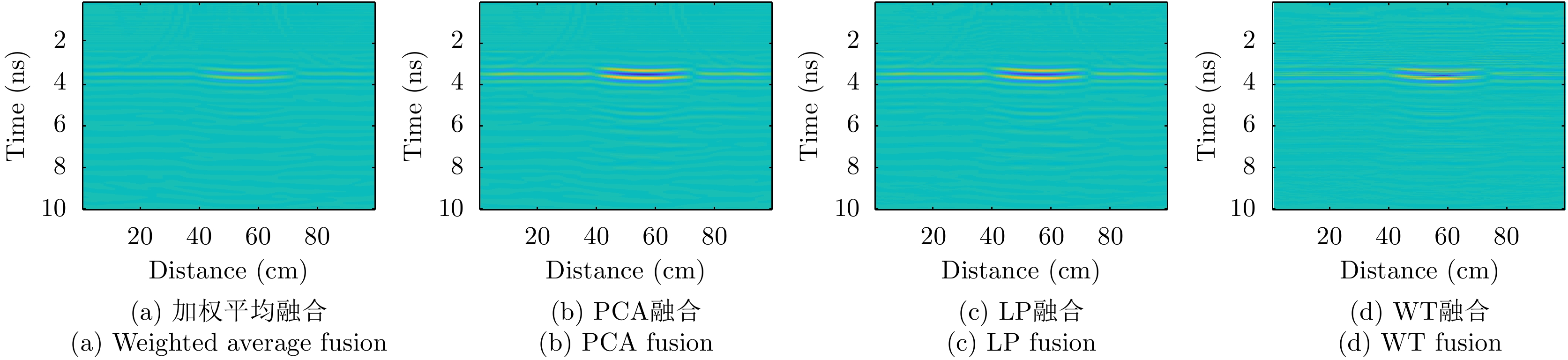
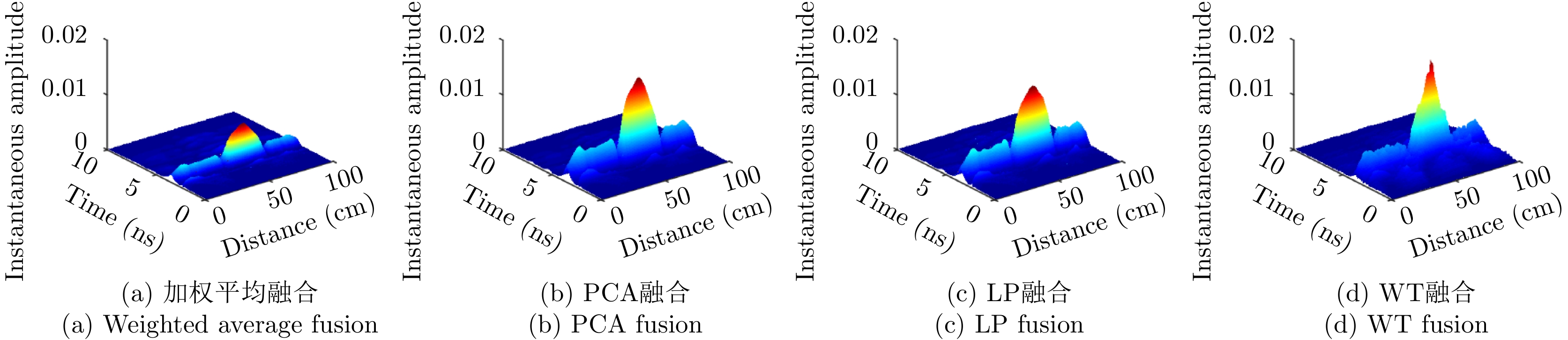
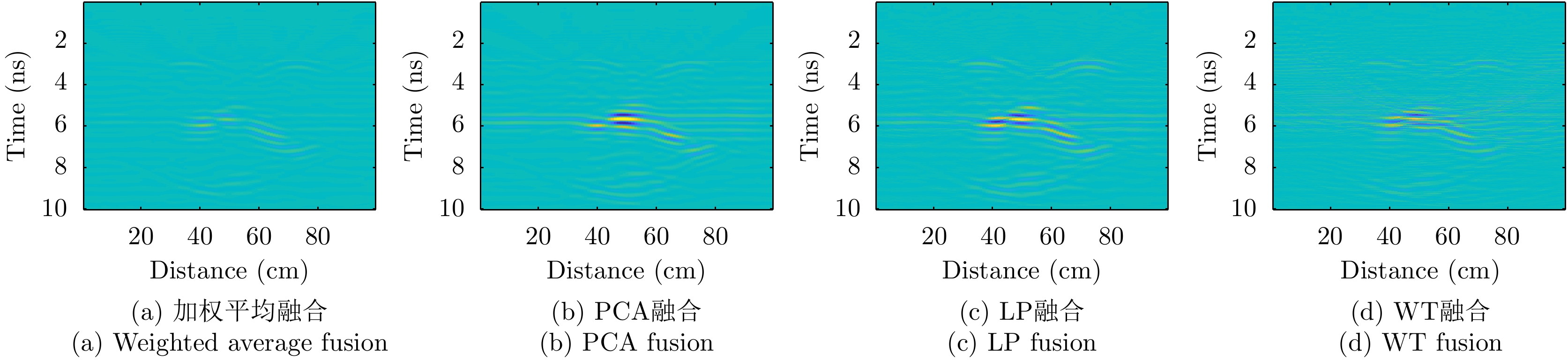
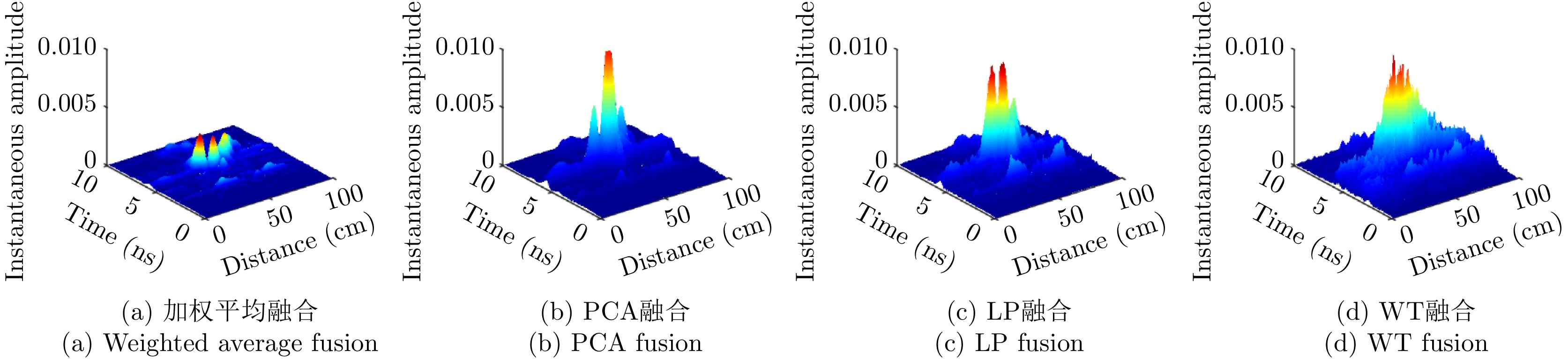
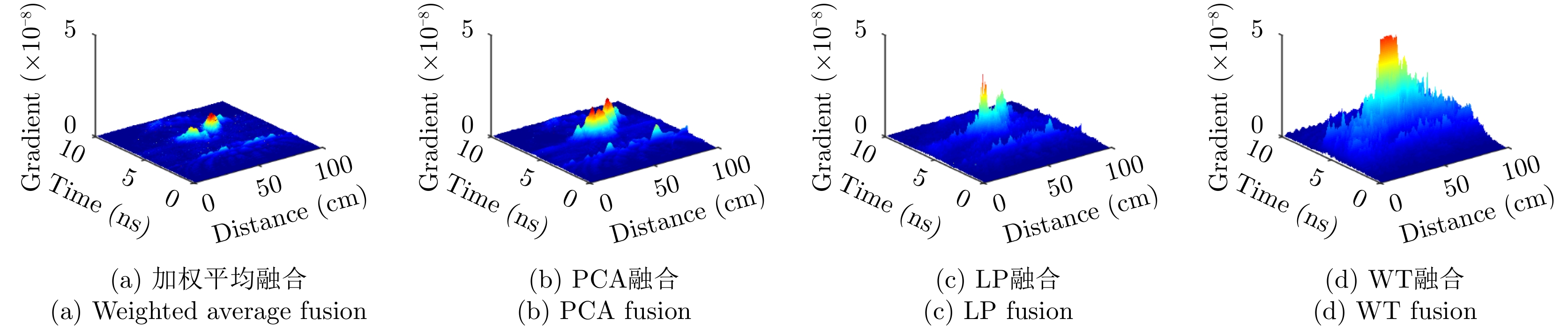
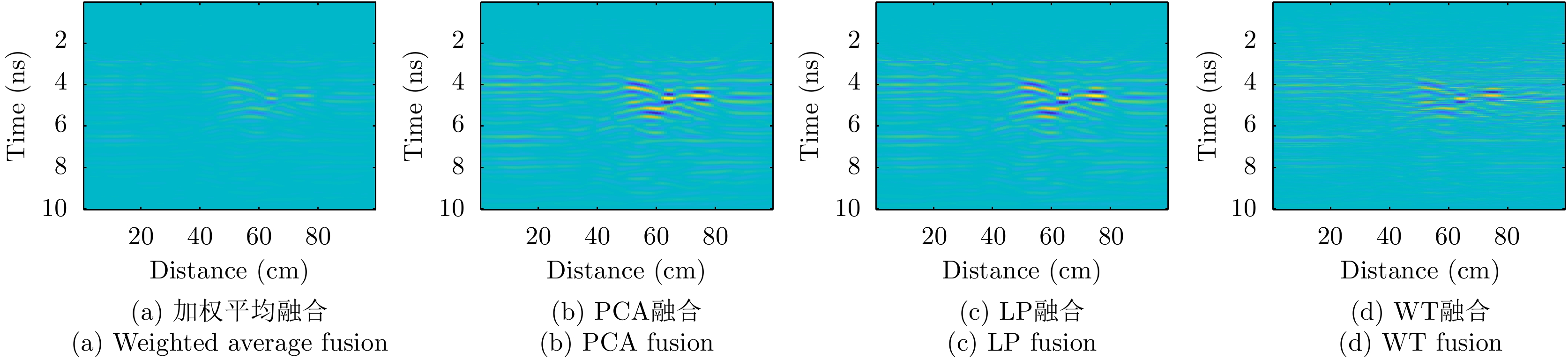
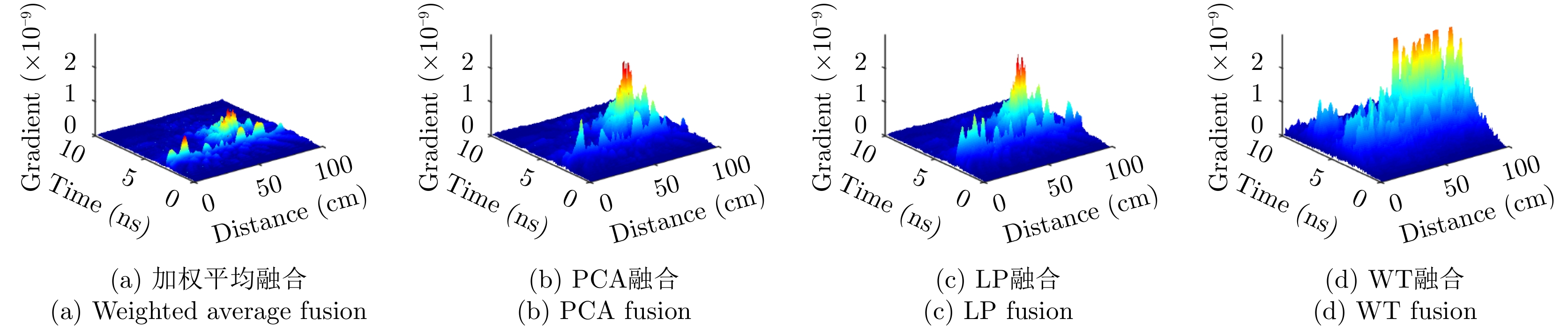
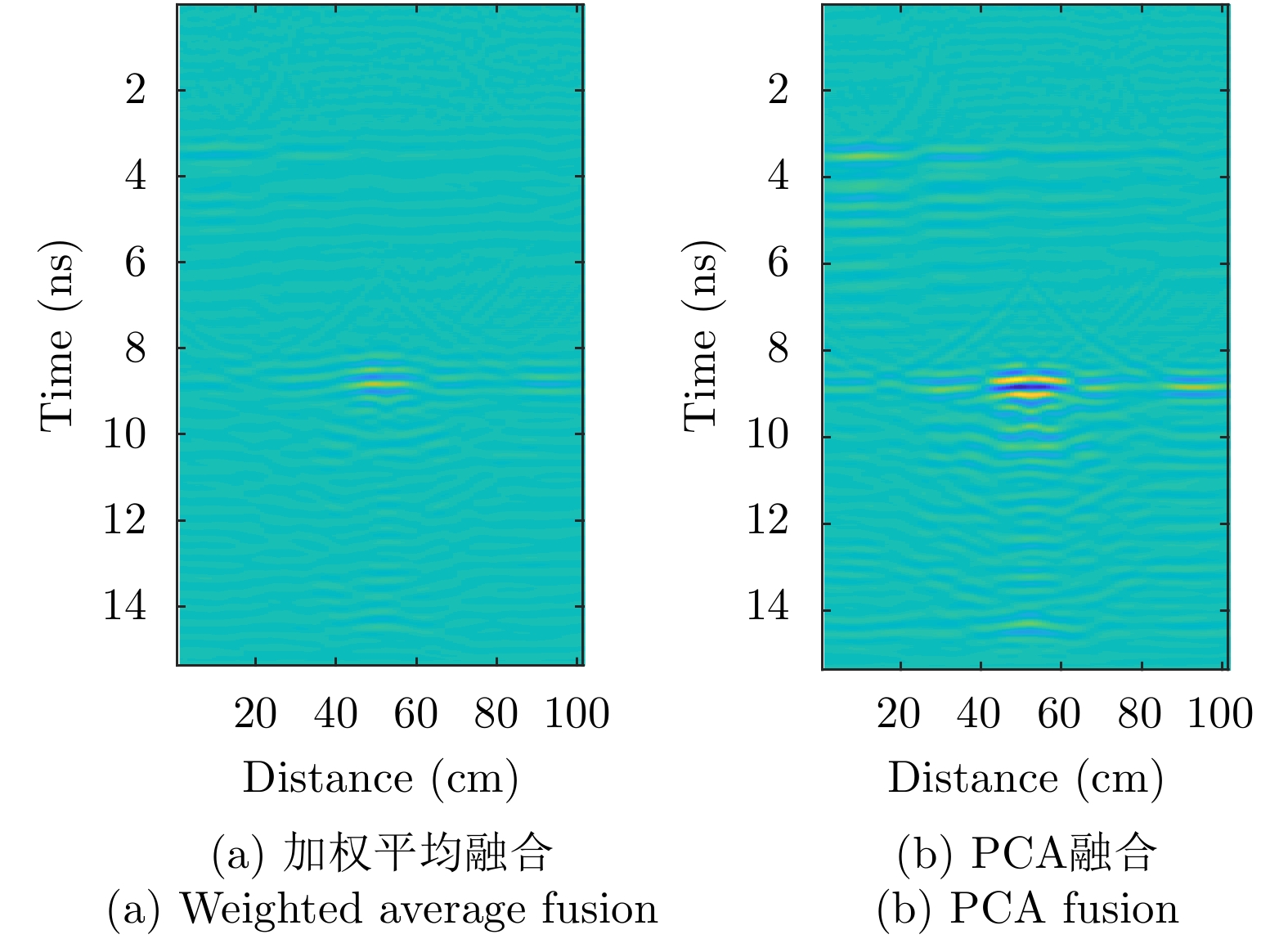
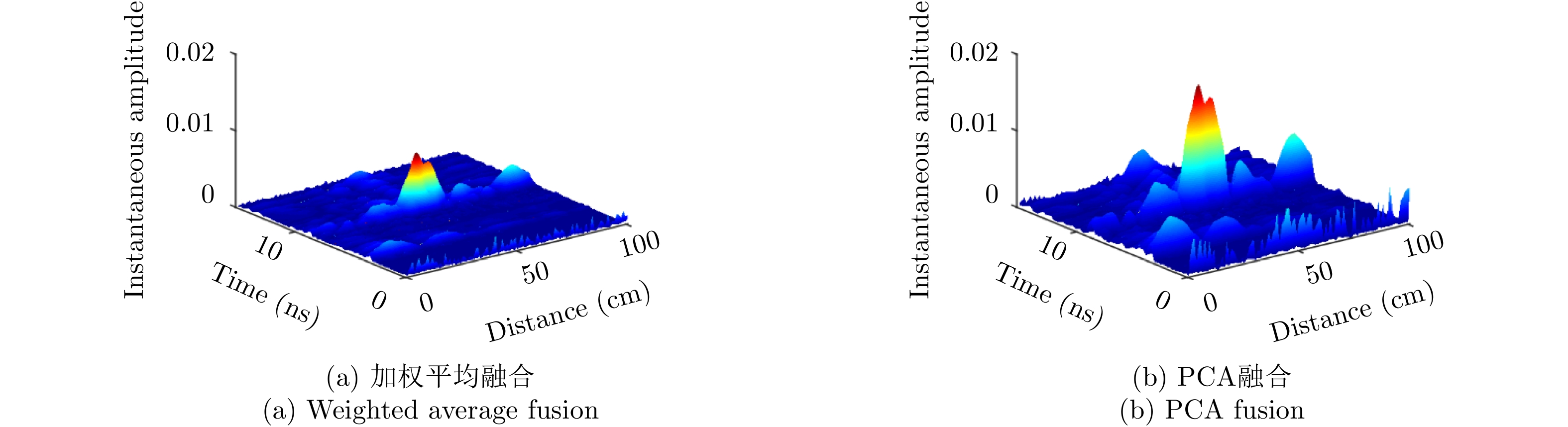
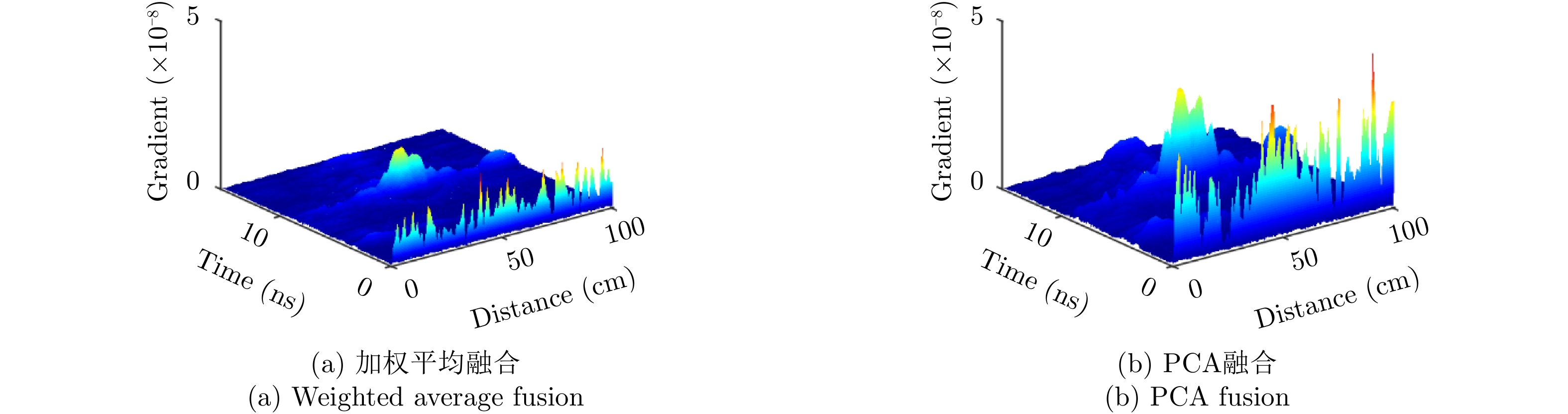
对于相同地下目标体,相比大部分传统单极化探地雷达,全极化探地雷达(FP-GPR)可以测得更全面的极化数据,称为VV, HH, VH。为了对地下目标体进行更全面精细的成像和识别, 数据融合技术被应用于FP-GPR将3种不同极化模式的极化信息结合起来。然而,目前全极化探地雷达数据融合常用的加权平均融合方法,它会掩盖全极化的优点,同时也无法同时适应不同的散射机制。因此,该文提出了基于主成分分析(PCA),拉普拉斯金字塔(LP)以及多尺度小波变换(WT)的3种FP-GPR数据融合方法。为了检验几种数据融合方法的可靠性,该文在实验室分别测量了代表3种不同基本散射机制目标体的FP-GPR数据进行分析, 引入瞬时振幅为主、梯度为辅的方法将加权平均融合方法与3种方法进行比较。结果表明该研究所应用的3种数据融合方法效果均优于加权平均融合,并且3种方法可以分别适应不同散射机制的目标体,主成分分析融合可以更好的应用于未知散射机制目标体。最后,将主成分分析融合应用于实际冰裂缝数据成像,得到很好的融合效果,且优于加权平均融合方法。 对于相同地下目标体,相比大部分传统单极化探地雷达,全极化探地雷达(FP-GPR)可以测得更全面的极化数据,称为VV, HH, VH。为了对地下目标体进行更全面精细的成像和识别, 数据融合技术被应用于FP-GPR将3种不同极化模式的极化信息结合起来。然而,目前全极化探地雷达数据融合常用的加权平均融合方法,它会掩盖全极化的优点,同时也无法同时适应不同的散射机制。因此,该文提出了基于主成分分析(PCA),拉普拉斯金字塔(LP)以及多尺度小波变换(WT)的3种FP-GPR数据融合方法。为了检验几种数据融合方法的可靠性,该文在实验室分别测量了代表3种不同基本散射机制目标体的FP-GPR数据进行分析, 引入瞬时振幅为主、梯度为辅的方法将加权平均融合方法与3种方法进行比较。结果表明该研究所应用的3种数据融合方法效果均优于加权平均融合,并且3种方法可以分别适应不同散射机制的目标体,主成分分析融合可以更好的应用于未知散射机制目标体。最后,将主成分分析融合应用于实际冰裂缝数据成像,得到很好的融合效果,且优于加权平均融合方法。
对于相同地下目标体,相比大部分传统单极化探地雷达,全极化探地雷达(FP-GPR)可以测得更全面的极化数据,称为VV, HH, VH。为了对地下目标体进行更全面精细的成像和识别, 数据融合技术被应用于FP-GPR将3种不同极化模式的极化信息结合起来。然而,目前全极化探地雷达数据融合常用的加权平均融合方法,它会掩盖全极化的优点,同时也无法同时适应不同的散射机制。因此,该文提出了基于主成分分析(PCA),拉普拉斯金字塔(LP)以及多尺度小波变换(WT)的3种FP-GPR数据融合方法。为了检验几种数据融合方法的可靠性,该文在实验室分别测量了代表3种不同基本散射机制目标体的FP-GPR数据进行分析, 引入瞬时振幅为主、梯度为辅的方法将加权平均融合方法与3种方法进行比较。结果表明该研究所应用的3种数据融合方法效果均优于加权平均融合,并且3种方法可以分别适应不同散射机制的目标体,主成分分析融合可以更好的应用于未知散射机制目标体。最后,将主成分分析融合应用于实际冰裂缝数据成像,得到很好的融合效果,且优于加权平均融合方法。 对于相同地下目标体,相比大部分传统单极化探地雷达,全极化探地雷达(FP-GPR)可以测得更全面的极化数据,称为VV, HH, VH。为了对地下目标体进行更全面精细的成像和识别, 数据融合技术被应用于FP-GPR将3种不同极化模式的极化信息结合起来。然而,目前全极化探地雷达数据融合常用的加权平均融合方法,它会掩盖全极化的优点,同时也无法同时适应不同的散射机制。因此,该文提出了基于主成分分析(PCA),拉普拉斯金字塔(LP)以及多尺度小波变换(WT)的3种FP-GPR数据融合方法。为了检验几种数据融合方法的可靠性,该文在实验室分别测量了代表3种不同基本散射机制目标体的FP-GPR数据进行分析, 引入瞬时振幅为主、梯度为辅的方法将加权平均融合方法与3种方法进行比较。结果表明该研究所应用的3种数据融合方法效果均优于加权平均融合,并且3种方法可以分别适应不同散射机制的目标体,主成分分析融合可以更好的应用于未知散射机制目标体。最后,将主成分分析融合应用于实际冰裂缝数据成像,得到很好的融合效果,且优于加权平均融合方法。







2021, 10(1): 86-99.
摘要:
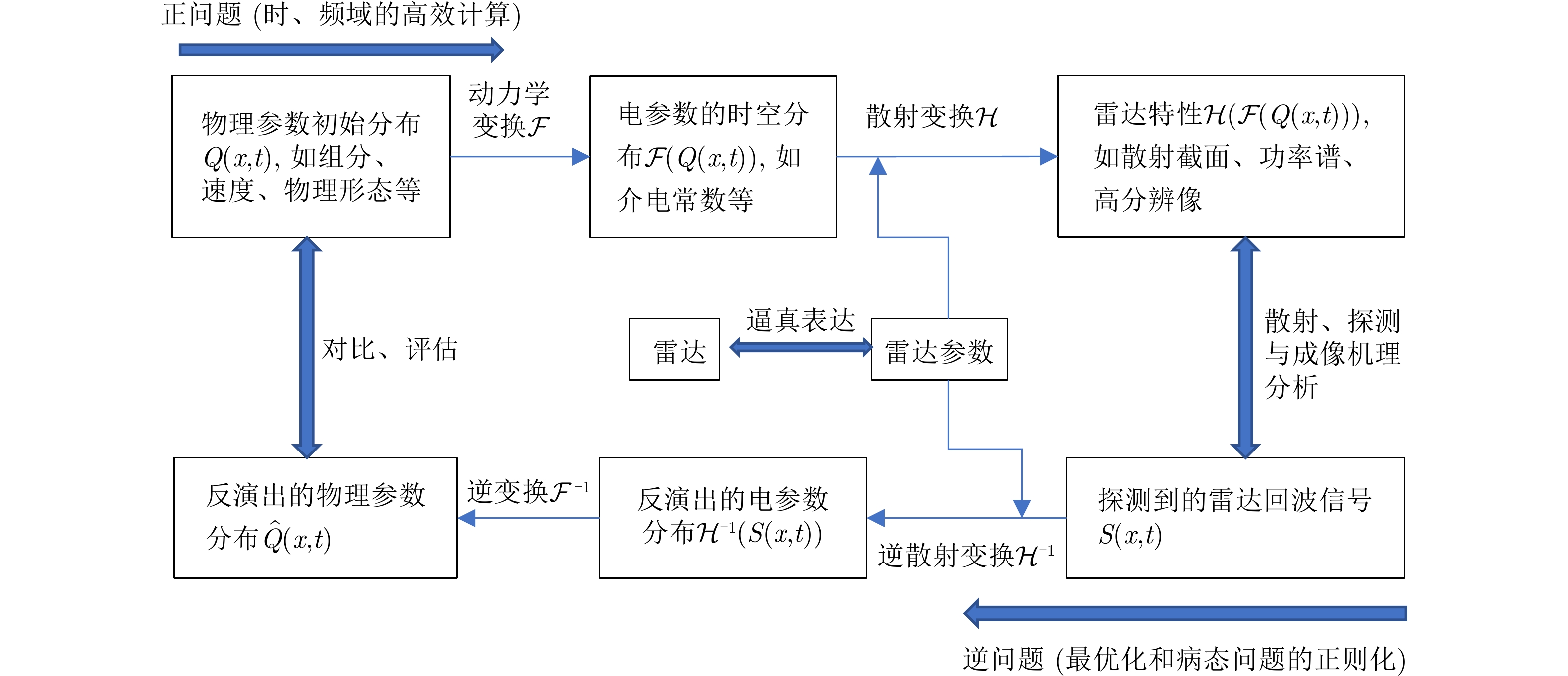
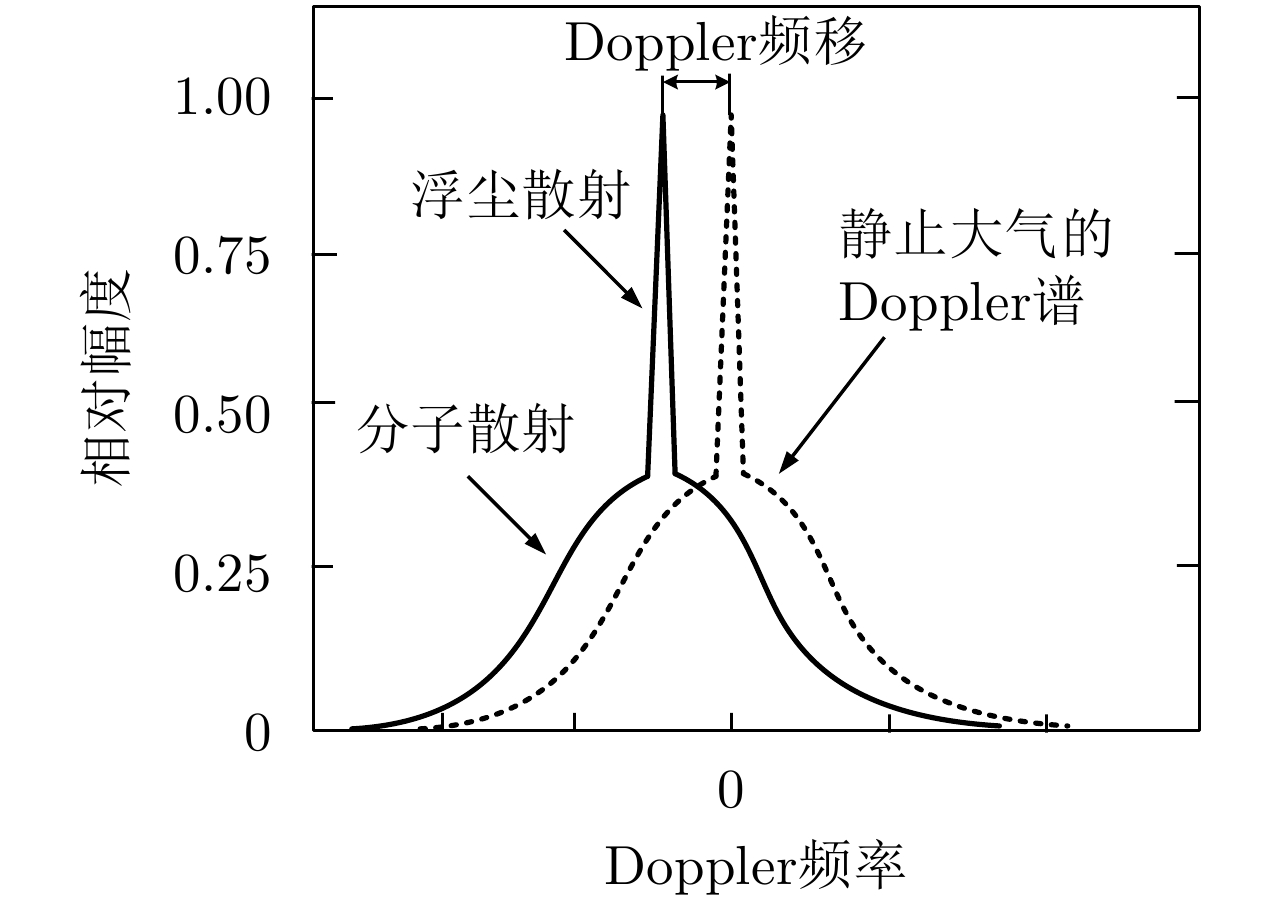
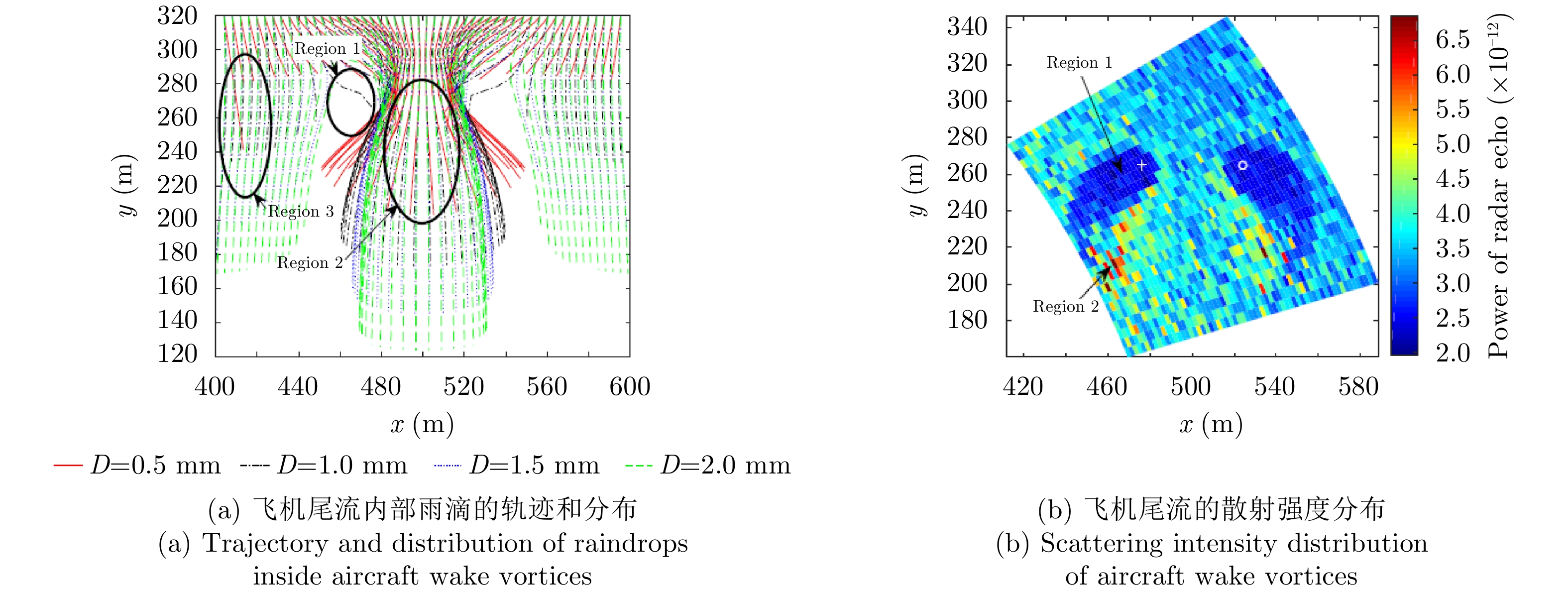
分布式软目标是指分布范围较大、具有时变的空间分布或内部相对运动的非刚性目标或目标群,是当前雷达领域较为关注的一类目标,其特性与感知研究是一个多学科交叉的问题。为便于雷达科技工作者较好地理解相关技术,该文从正问题和逆问题两个角度,分连续型和离散型两种情况,对这类目标的运动、电磁散射/传输、雷达特征、探测与参数反演等技术的现状进行了梳理,并分析了发展趋势。以飞机尾流为例,对这类目标的雷达特性与感知技术进行了阐述,为相关雷达探测技术发展提供重要参考。 分布式软目标是指分布范围较大、具有时变的空间分布或内部相对运动的非刚性目标或目标群,是当前雷达领域较为关注的一类目标,其特性与感知研究是一个多学科交叉的问题。为便于雷达科技工作者较好地理解相关技术,该文从正问题和逆问题两个角度,分连续型和离散型两种情况,对这类目标的运动、电磁散射/传输、雷达特征、探测与参数反演等技术的现状进行了梳理,并分析了发展趋势。以飞机尾流为例,对这类目标的雷达特性与感知技术进行了阐述,为相关雷达探测技术发展提供重要参考。
分布式软目标是指分布范围较大、具有时变的空间分布或内部相对运动的非刚性目标或目标群,是当前雷达领域较为关注的一类目标,其特性与感知研究是一个多学科交叉的问题。为便于雷达科技工作者较好地理解相关技术,该文从正问题和逆问题两个角度,分连续型和离散型两种情况,对这类目标的运动、电磁散射/传输、雷达特征、探测与参数反演等技术的现状进行了梳理,并分析了发展趋势。以飞机尾流为例,对这类目标的雷达特性与感知技术进行了阐述,为相关雷达探测技术发展提供重要参考。 分布式软目标是指分布范围较大、具有时变的空间分布或内部相对运动的非刚性目标或目标群,是当前雷达领域较为关注的一类目标,其特性与感知研究是一个多学科交叉的问题。为便于雷达科技工作者较好地理解相关技术,该文从正问题和逆问题两个角度,分连续型和离散型两种情况,对这类目标的运动、电磁散射/传输、雷达特征、探测与参数反演等技术的现状进行了梳理,并分析了发展趋势。以飞机尾流为例,对这类目标的雷达特性与感知技术进行了阐述,为相关雷达探测技术发展提供重要参考。


2021, 10(1): 100-115.
摘要:
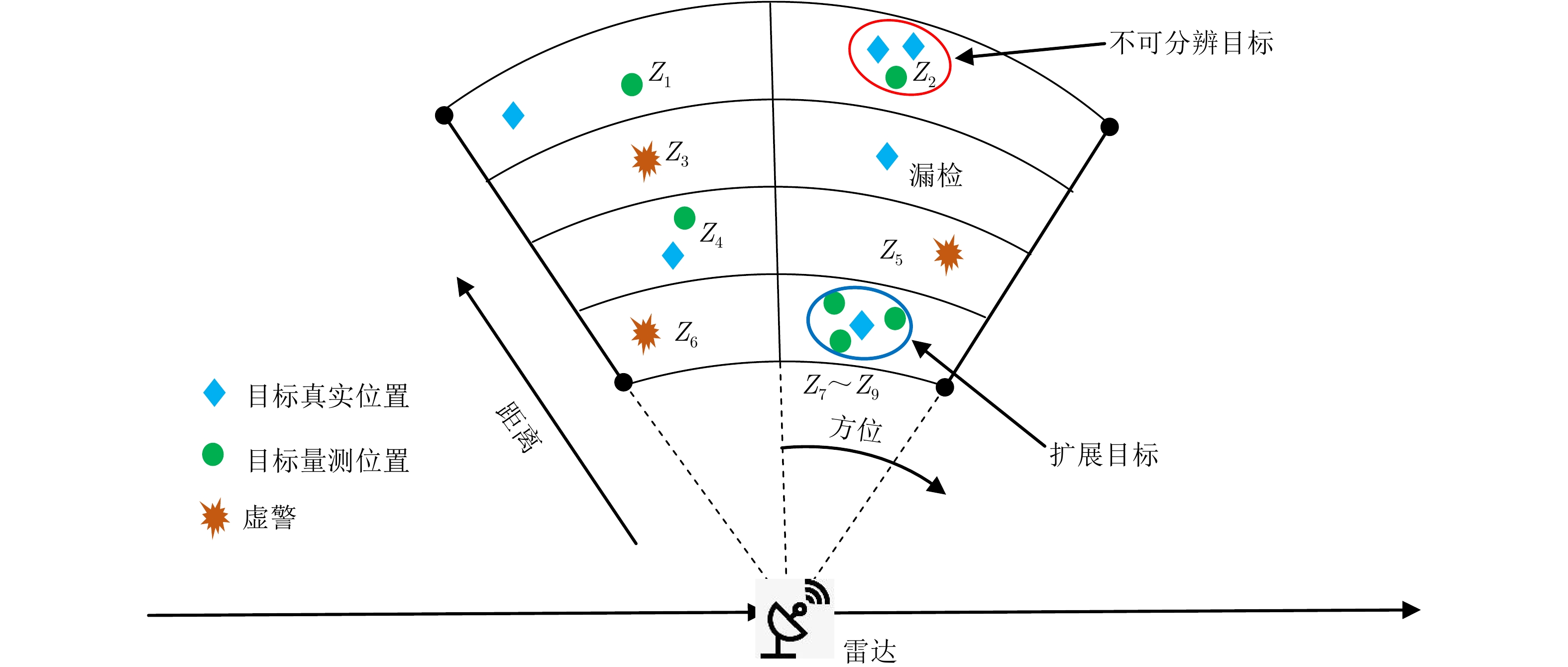
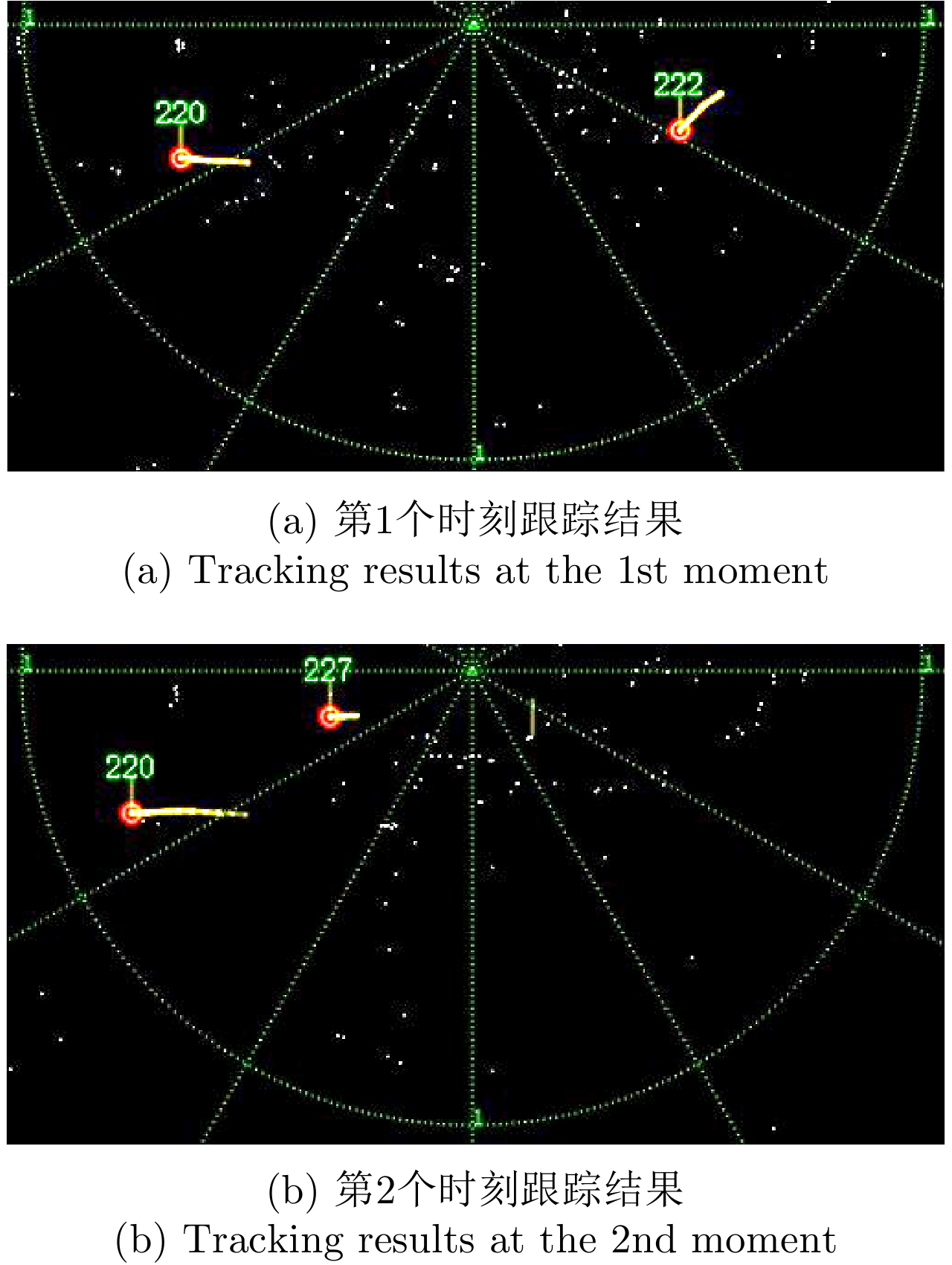
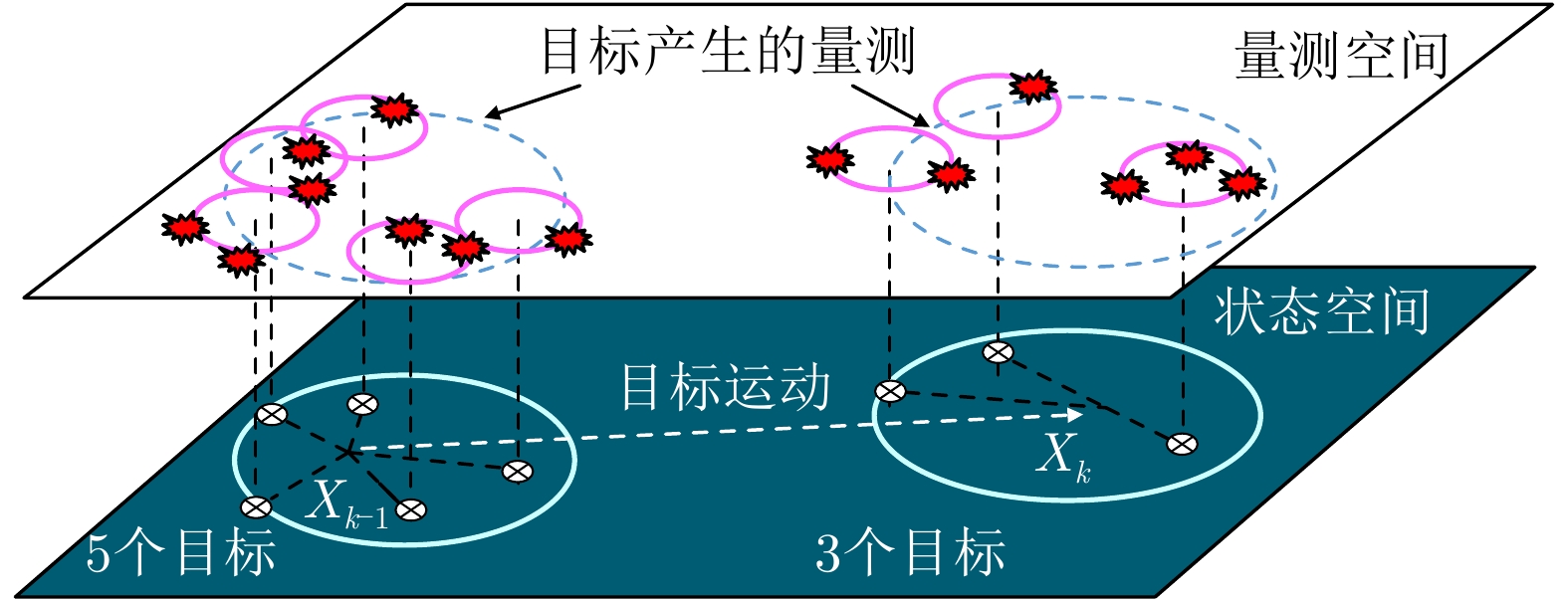
多目标跟踪(MTT)是雷达数据处理领域的难点。相较于一般场景,海上多目标跟踪(MMTT)面临的挑战更大。一方面,复杂的海洋环境和较低的信杂比使得海面小型目标的检测性能受限,检测得到的点迹存在漏检并包含大量虚警,导致多目标跟踪处理的难度大大增加;另一方面,当海面目标以多群形式编队运动,或采用高分辨率雷达对海探测时,目标量测容易呈现跨单元分布的特征,这种情况下,采用常规的多目标跟踪方法效果不理想。目前,国内外关于海上多目标跟踪方面的研究文献还不多,且大都侧重于单一情形。该文从常规多目标跟踪方法、幅度信息辅助的多目标跟踪方法、多目标检测前跟踪方法以及多扩展目标跟踪方法等4个方面对海上多目标跟踪技术进行了梳理,并对海上多目标跟踪的未来发展方向进行了展望。 多目标跟踪(MTT)是雷达数据处理领域的难点。相较于一般场景,海上多目标跟踪(MMTT)面临的挑战更大。一方面,复杂的海洋环境和较低的信杂比使得海面小型目标的检测性能受限,检测得到的点迹存在漏检并包含大量虚警,导致多目标跟踪处理的难度大大增加;另一方面,当海面目标以多群形式编队运动,或采用高分辨率雷达对海探测时,目标量测容易呈现跨单元分布的特征,这种情况下,采用常规的多目标跟踪方法效果不理想。目前,国内外关于海上多目标跟踪方面的研究文献还不多,且大都侧重于单一情形。该文从常规多目标跟踪方法、幅度信息辅助的多目标跟踪方法、多目标检测前跟踪方法以及多扩展目标跟踪方法等4个方面对海上多目标跟踪技术进行了梳理,并对海上多目标跟踪的未来发展方向进行了展望。
多目标跟踪(MTT)是雷达数据处理领域的难点。相较于一般场景,海上多目标跟踪(MMTT)面临的挑战更大。一方面,复杂的海洋环境和较低的信杂比使得海面小型目标的检测性能受限,检测得到的点迹存在漏检并包含大量虚警,导致多目标跟踪处理的难度大大增加;另一方面,当海面目标以多群形式编队运动,或采用高分辨率雷达对海探测时,目标量测容易呈现跨单元分布的特征,这种情况下,采用常规的多目标跟踪方法效果不理想。目前,国内外关于海上多目标跟踪方面的研究文献还不多,且大都侧重于单一情形。该文从常规多目标跟踪方法、幅度信息辅助的多目标跟踪方法、多目标检测前跟踪方法以及多扩展目标跟踪方法等4个方面对海上多目标跟踪技术进行了梳理,并对海上多目标跟踪的未来发展方向进行了展望。 多目标跟踪(MTT)是雷达数据处理领域的难点。相较于一般场景,海上多目标跟踪(MMTT)面临的挑战更大。一方面,复杂的海洋环境和较低的信杂比使得海面小型目标的检测性能受限,检测得到的点迹存在漏检并包含大量虚警,导致多目标跟踪处理的难度大大增加;另一方面,当海面目标以多群形式编队运动,或采用高分辨率雷达对海探测时,目标量测容易呈现跨单元分布的特征,这种情况下,采用常规的多目标跟踪方法效果不理想。目前,国内外关于海上多目标跟踪方面的研究文献还不多,且大都侧重于单一情形。该文从常规多目标跟踪方法、幅度信息辅助的多目标跟踪方法、多目标检测前跟踪方法以及多扩展目标跟踪方法等4个方面对海上多目标跟踪技术进行了梳理,并对海上多目标跟踪的未来发展方向进行了展望。
2021, 10(1): 116-130.
摘要:
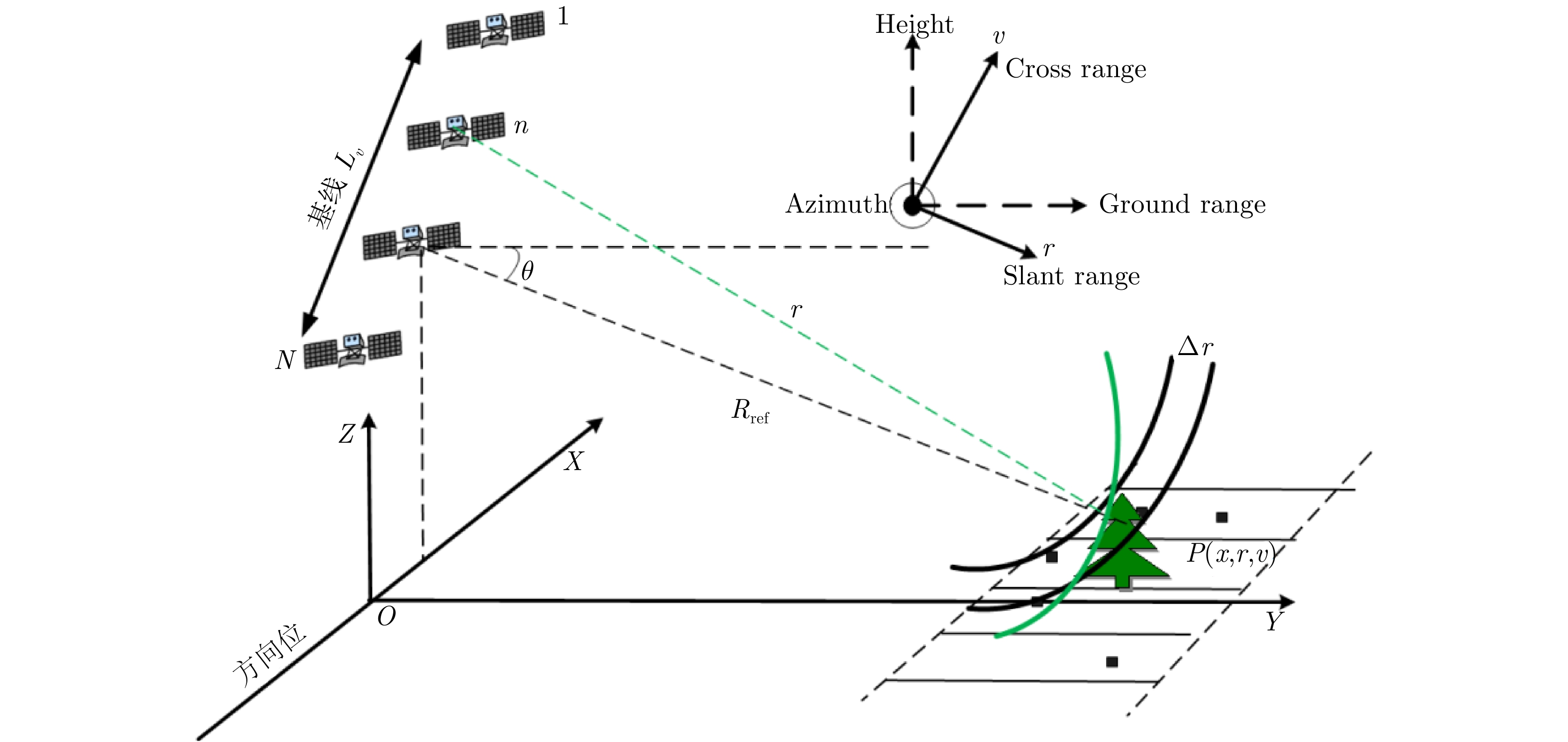
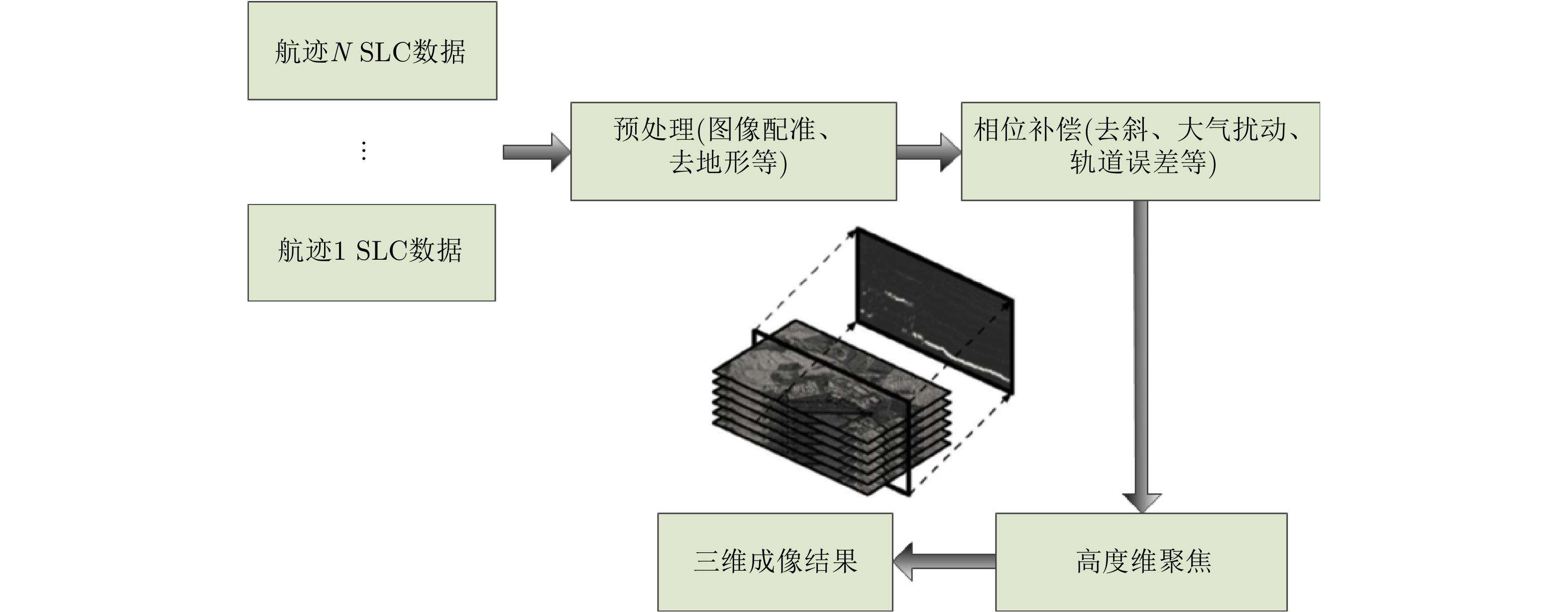
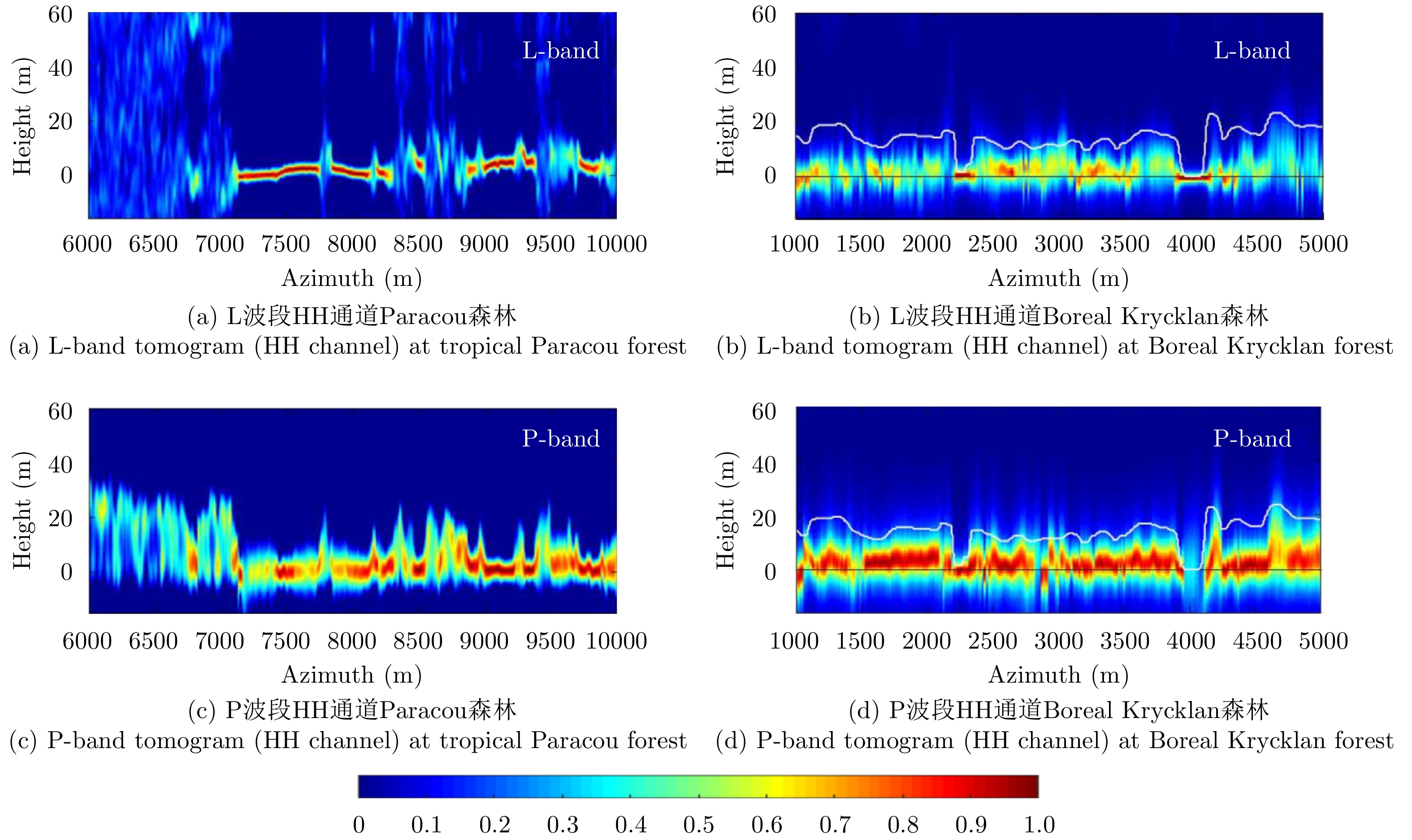
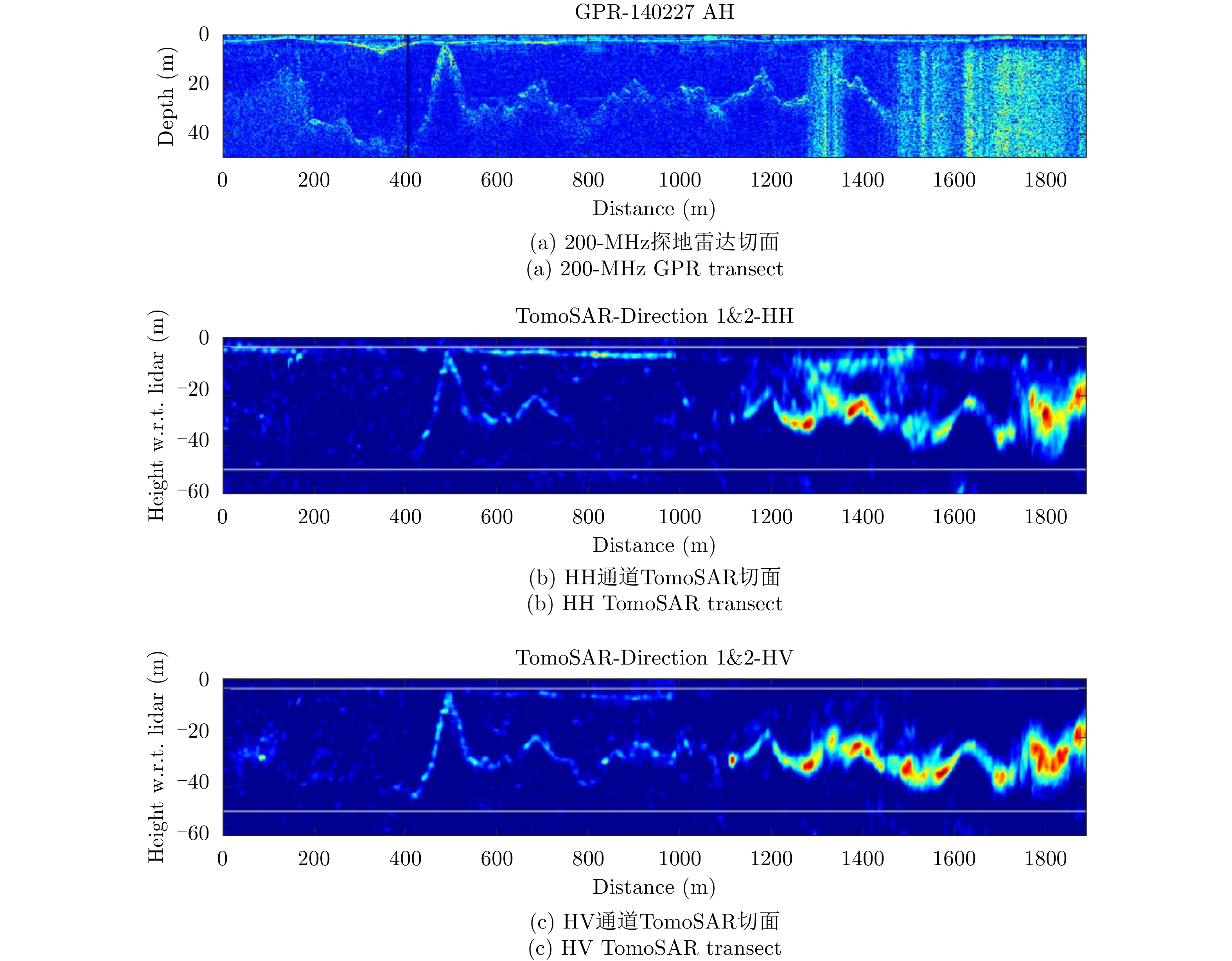
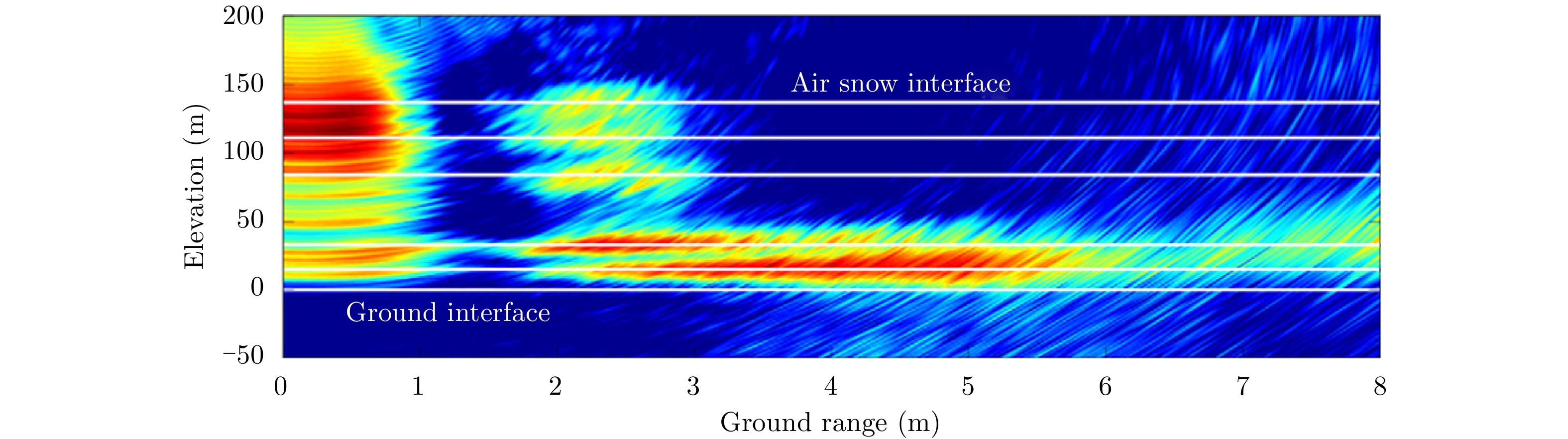
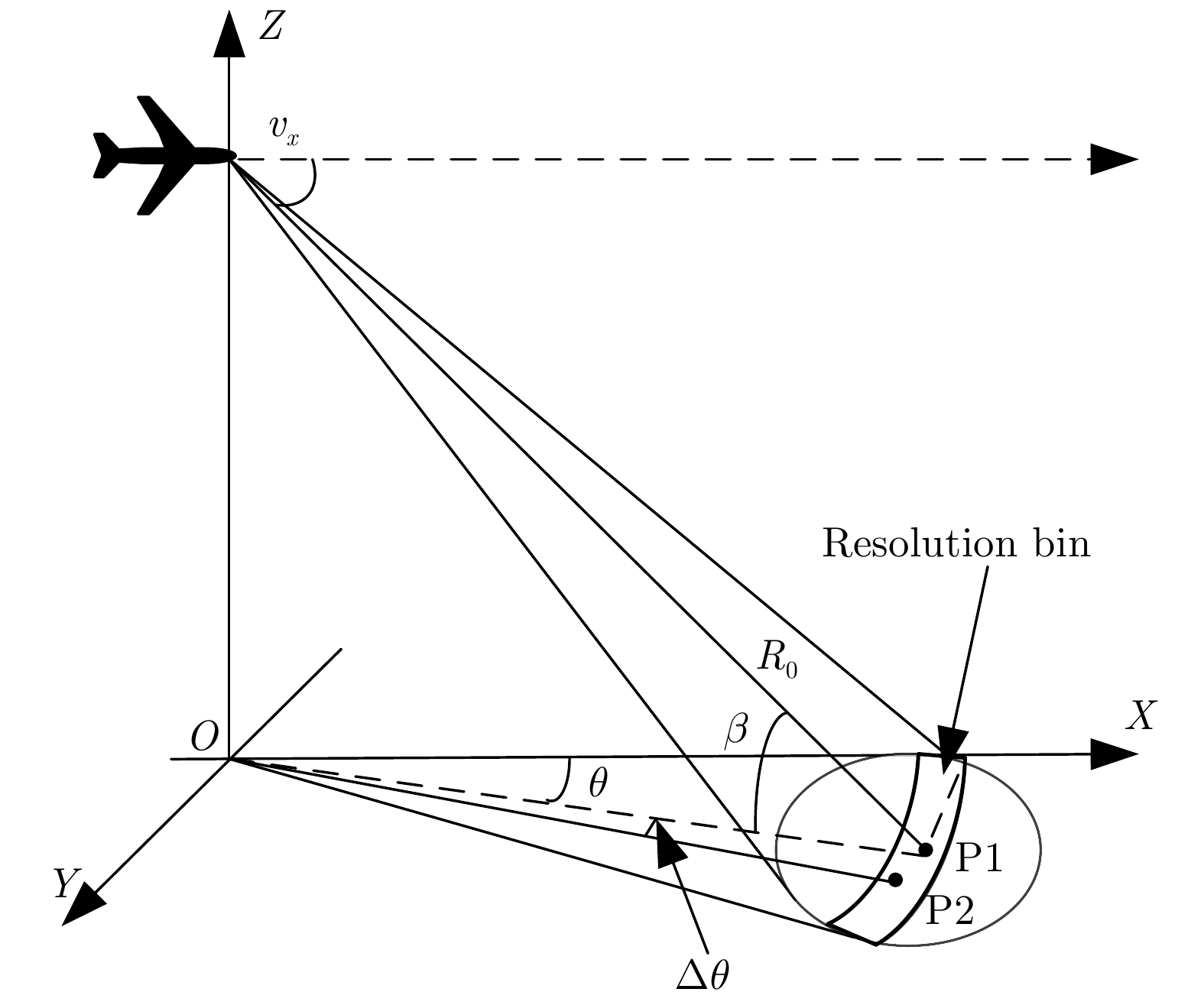
传统的合成孔径雷达(SAR)成像是将现实中的三维场景投影到方位-斜距向二维平面的一系列处理过程,损失了三维空间的高度维信息。随着SAR系统及处理技术的发展,层析SAR系统通过沿高度向的多个数据获取构造高度维合成孔径,利用阵列信号处理方法实现目标高分辨率三维成像,对观测场景进行三维重建,获取地面目标的垂直结构信息,对植被监测、雪冰探测、城市建模等应用具有重要应用价值。该文基于层析SAR观测机理,分析了配准、去平地效应、相位补偿、高度维聚焦等三维成像关键环节以及算法研究现状,着重阐述了层析SAR在植被、雪冰、城市信息提取方面的应用,介绍了过去20年中相关的实验结果,讨论了不同平台下植被高度与冠层结构、冰川厚度与内部结构、积雪厚度与分层、城市区三维重建与形变监测等方面的应用潜力与存在的问题,并对其发展趋势进行了展望。 传统的合成孔径雷达(SAR)成像是将现实中的三维场景投影到方位-斜距向二维平面的一系列处理过程,损失了三维空间的高度维信息。随着SAR系统及处理技术的发展,层析SAR系统通过沿高度向的多个数据获取构造高度维合成孔径,利用阵列信号处理方法实现目标高分辨率三维成像,对观测场景进行三维重建,获取地面目标的垂直结构信息,对植被监测、雪冰探测、城市建模等应用具有重要应用价值。该文基于层析SAR观测机理,分析了配准、去平地效应、相位补偿、高度维聚焦等三维成像关键环节以及算法研究现状,着重阐述了层析SAR在植被、雪冰、城市信息提取方面的应用,介绍了过去20年中相关的实验结果,讨论了不同平台下植被高度与冠层结构、冰川厚度与内部结构、积雪厚度与分层、城市区三维重建与形变监测等方面的应用潜力与存在的问题,并对其发展趋势进行了展望。
传统的合成孔径雷达(SAR)成像是将现实中的三维场景投影到方位-斜距向二维平面的一系列处理过程,损失了三维空间的高度维信息。随着SAR系统及处理技术的发展,层析SAR系统通过沿高度向的多个数据获取构造高度维合成孔径,利用阵列信号处理方法实现目标高分辨率三维成像,对观测场景进行三维重建,获取地面目标的垂直结构信息,对植被监测、雪冰探测、城市建模等应用具有重要应用价值。该文基于层析SAR观测机理,分析了配准、去平地效应、相位补偿、高度维聚焦等三维成像关键环节以及算法研究现状,着重阐述了层析SAR在植被、雪冰、城市信息提取方面的应用,介绍了过去20年中相关的实验结果,讨论了不同平台下植被高度与冠层结构、冰川厚度与内部结构、积雪厚度与分层、城市区三维重建与形变监测等方面的应用潜力与存在的问题,并对其发展趋势进行了展望。 传统的合成孔径雷达(SAR)成像是将现实中的三维场景投影到方位-斜距向二维平面的一系列处理过程,损失了三维空间的高度维信息。随着SAR系统及处理技术的发展,层析SAR系统通过沿高度向的多个数据获取构造高度维合成孔径,利用阵列信号处理方法实现目标高分辨率三维成像,对观测场景进行三维重建,获取地面目标的垂直结构信息,对植被监测、雪冰探测、城市建模等应用具有重要应用价值。该文基于层析SAR观测机理,分析了配准、去平地效应、相位补偿、高度维聚焦等三维成像关键环节以及算法研究现状,着重阐述了层析SAR在植被、雪冰、城市信息提取方面的应用,介绍了过去20年中相关的实验结果,讨论了不同平台下植被高度与冠层结构、冰川厚度与内部结构、积雪厚度与分层、城市区三维重建与形变监测等方面的应用潜力与存在的问题,并对其发展趋势进行了展望。


摘要:
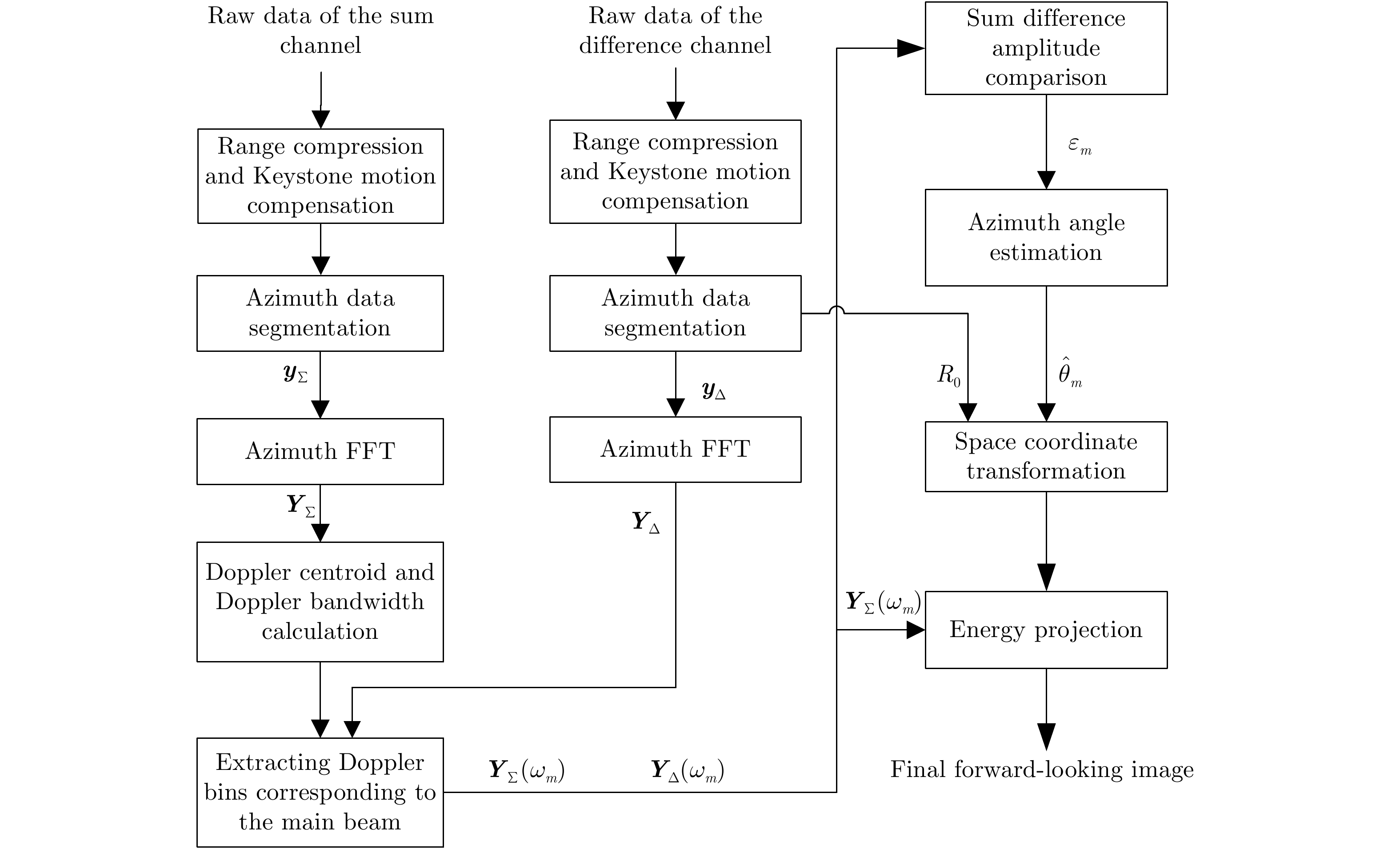
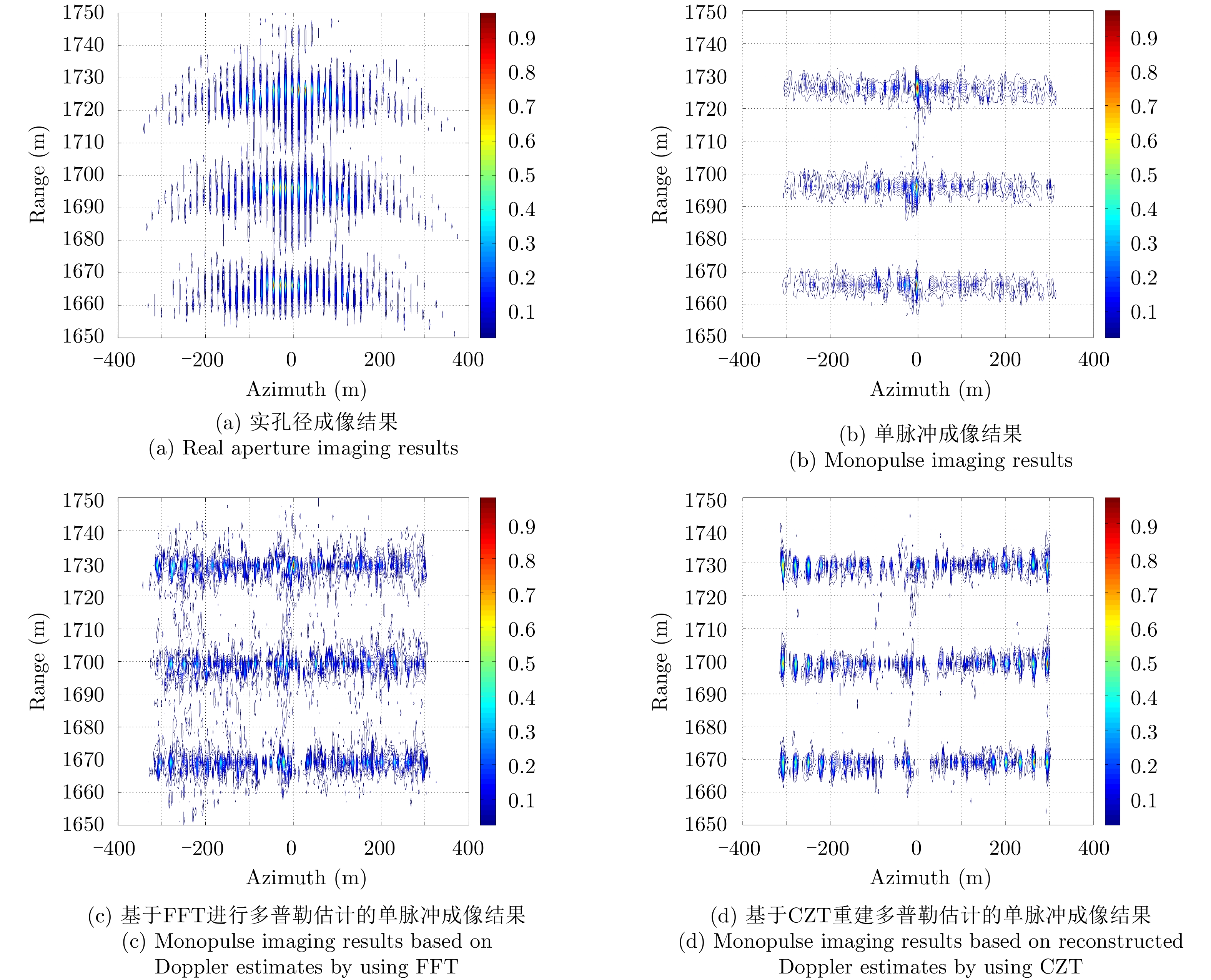
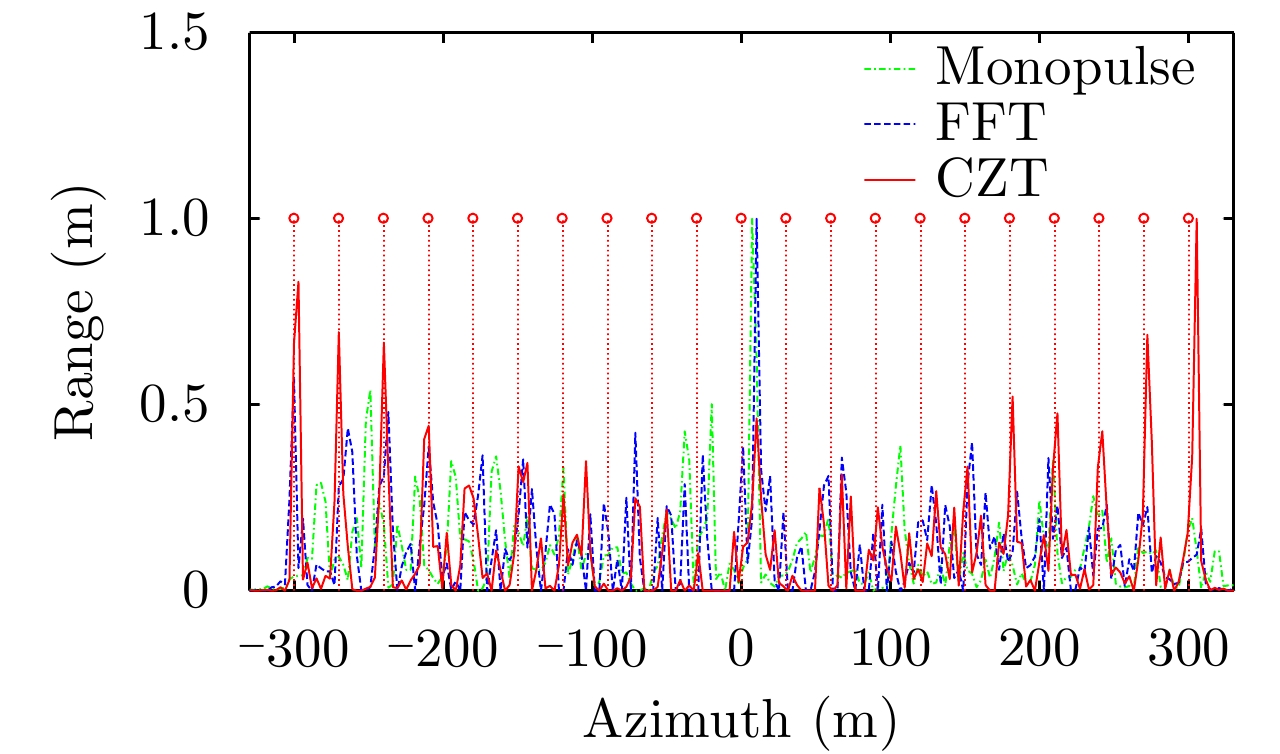
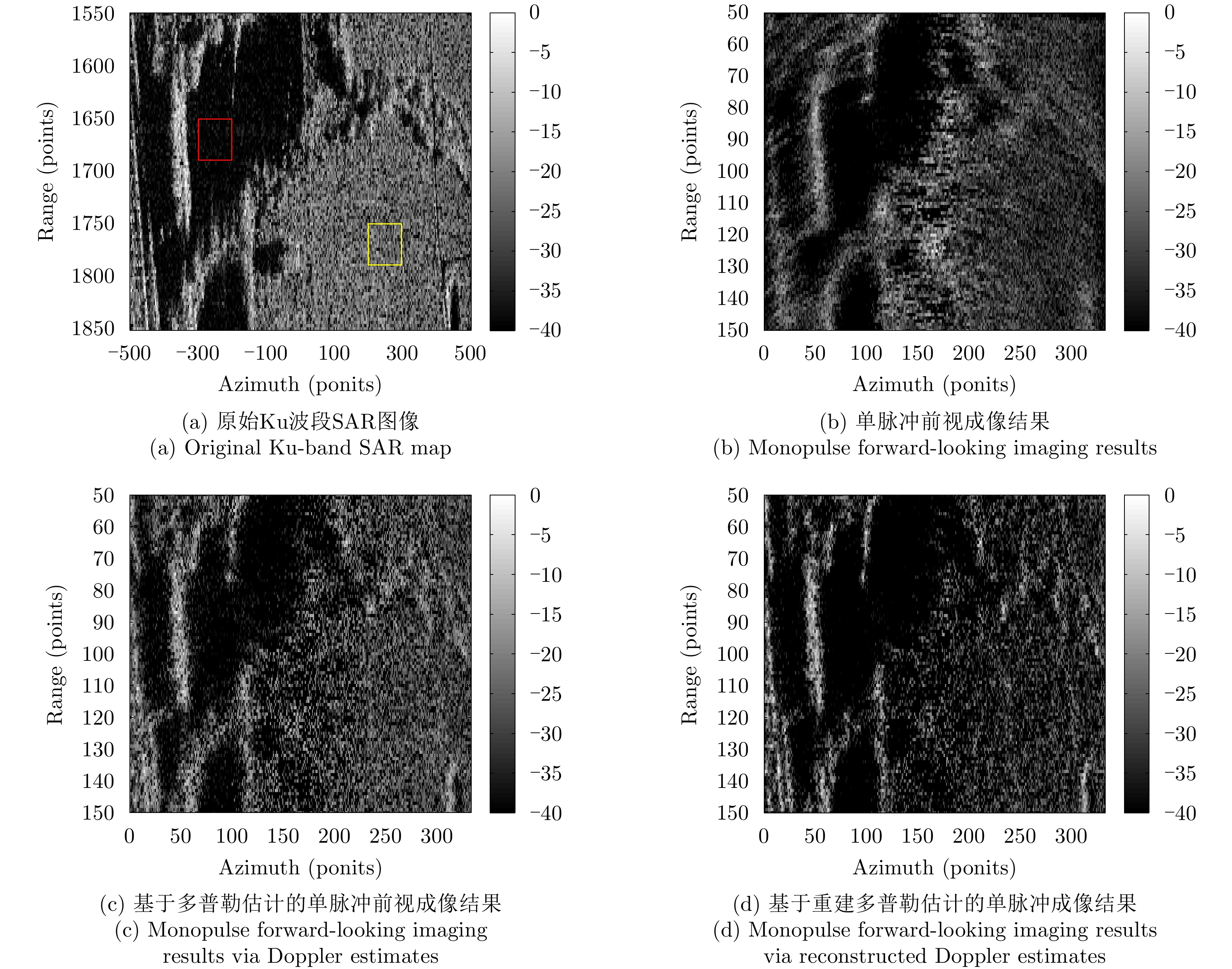
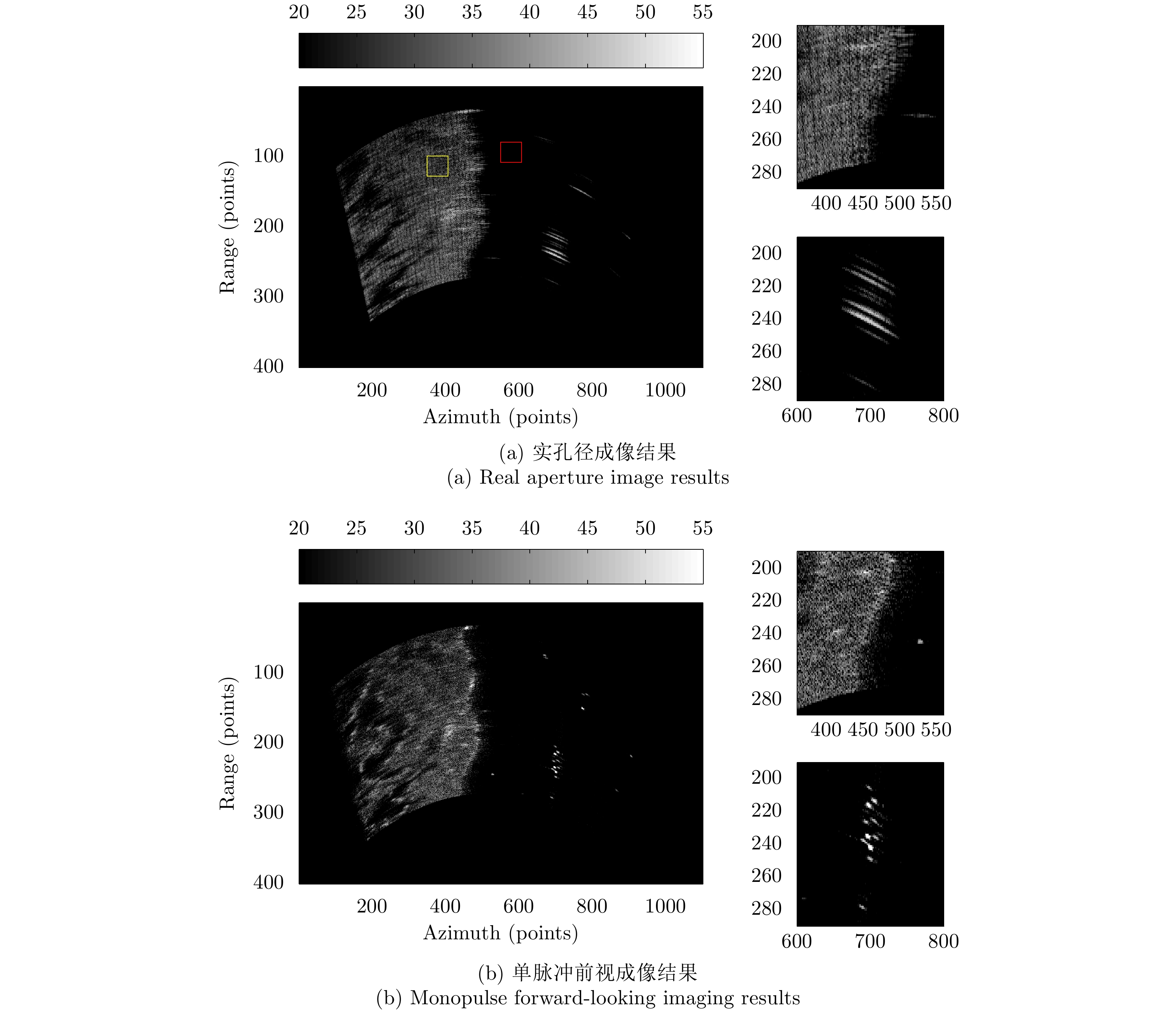
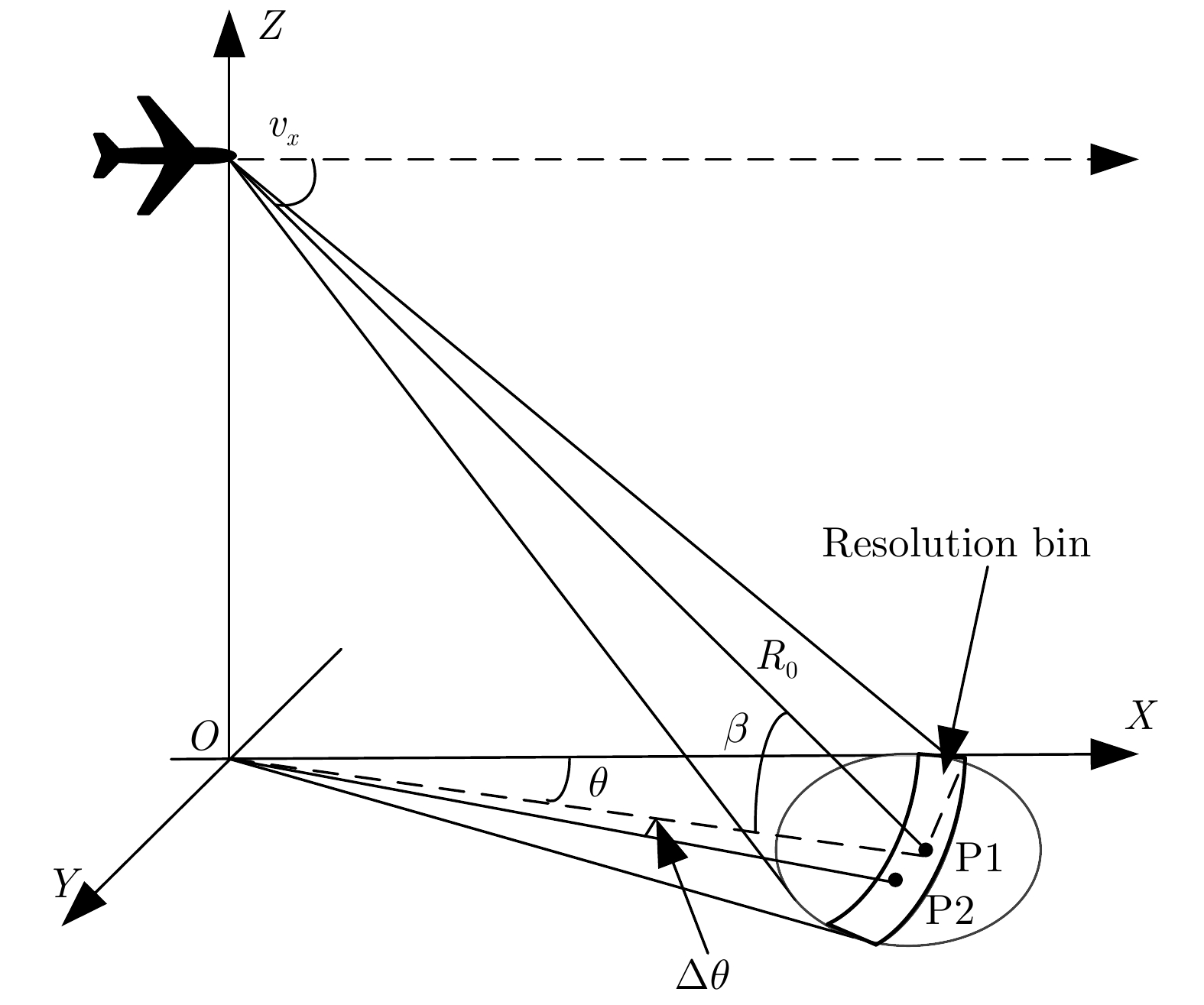
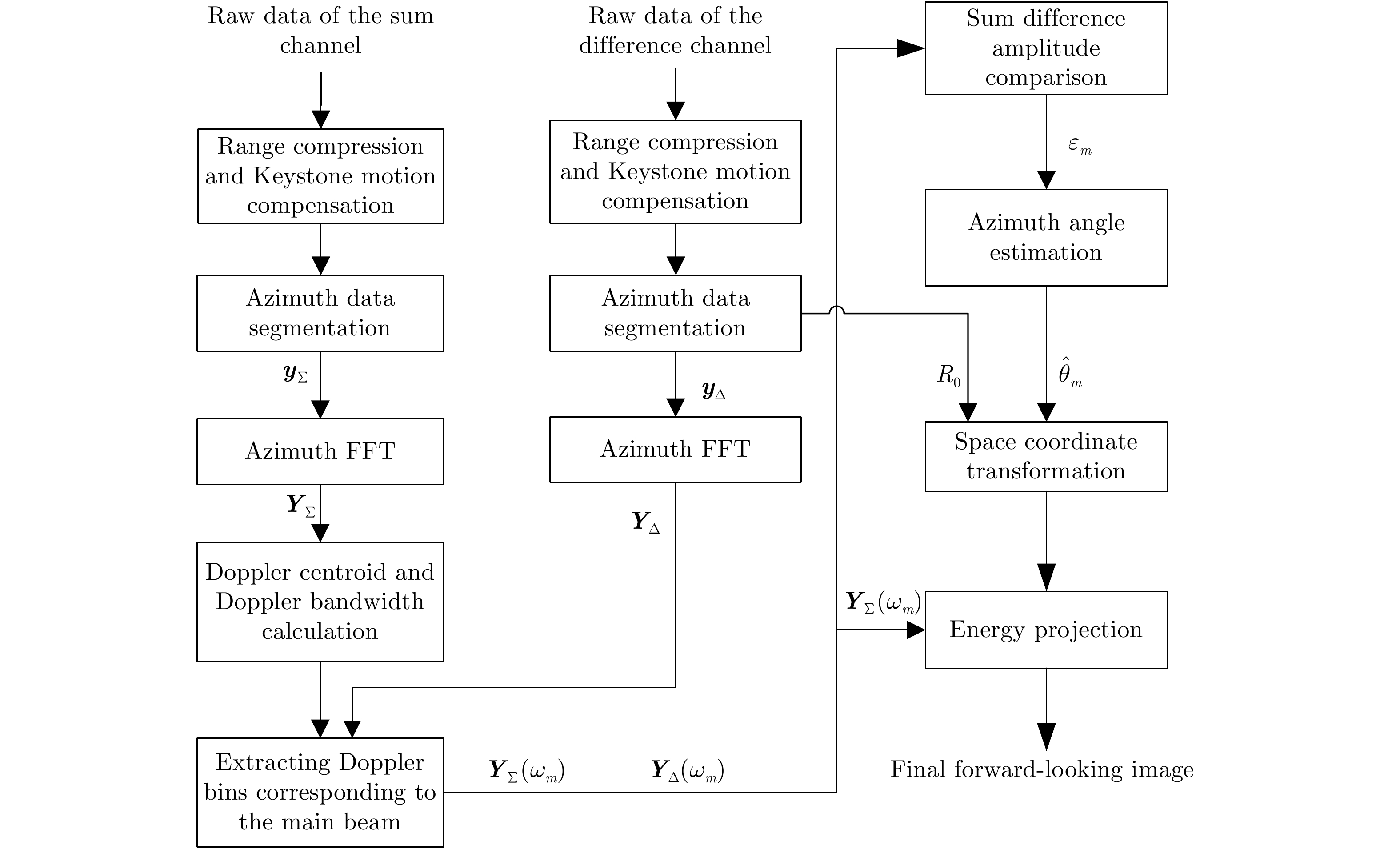
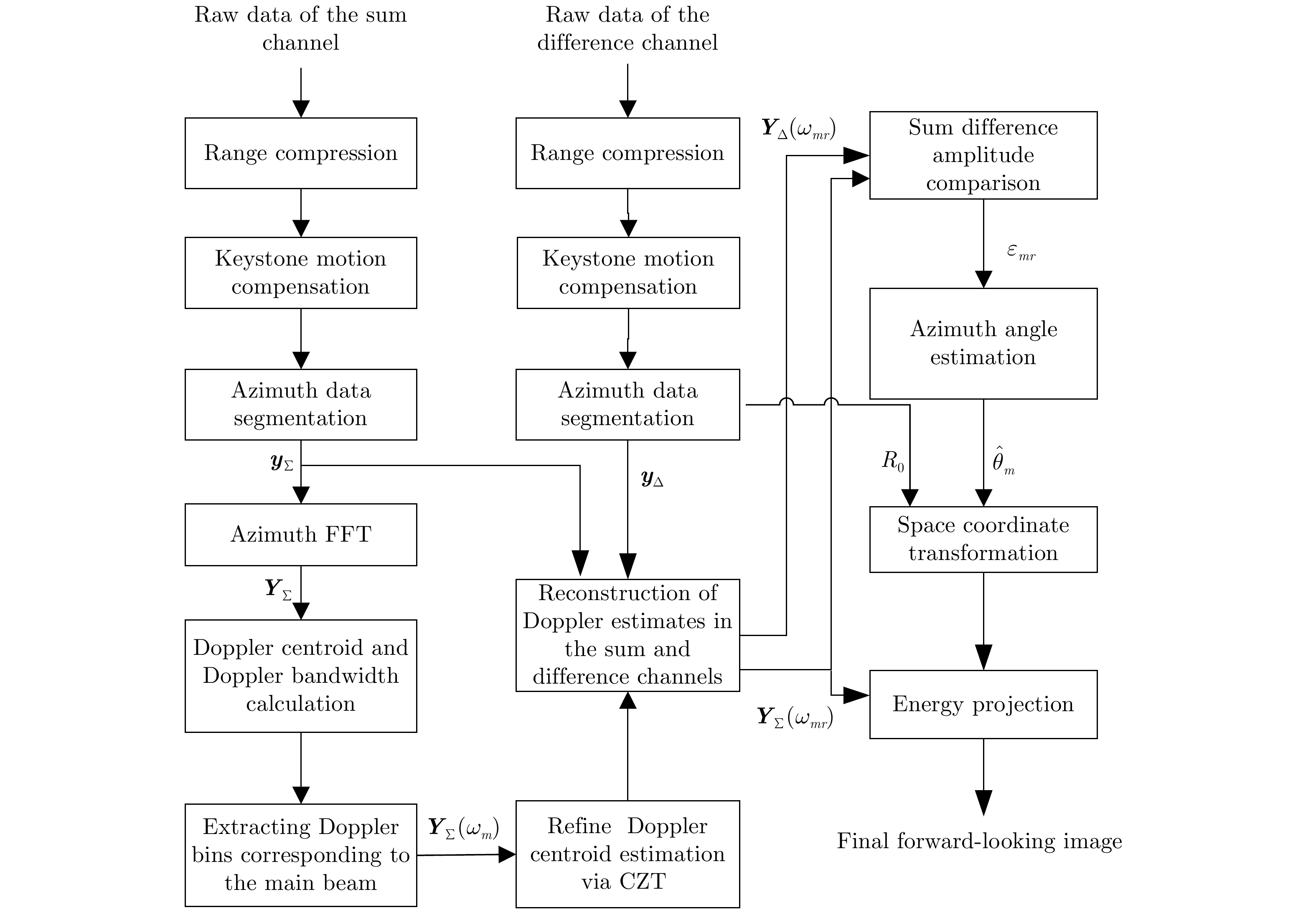
单脉冲测角技术用于扫描雷达前视成像可有效提高图像的清晰度,但单个脉冲对同分辨单元多目标测角时会发生角闪烁现象,造成图像模糊。该文提出了一种基于单脉冲雷达和差通道多普勒估计的前视成像算法,利用目标和平台之间相对运动引起的多普勒梯度差异实现同分辨单元内不同方向目标的分离,然后在多普勒域采用和差比幅测角(SDAC)技术测量目标的方位角,完成能量投影。为提高测角精度,进一步提出了采用调频Z变换(CZT)重建和差多普勒估计并进行比幅测角的算法。点目标仿真实验结果表明,所提出的算法在前斜视方向具有分离多目标的能力,对实测数据成像结果验证了基于CZT的成像算法相比传统算法能显著提高对场景成像的轮廓清晰度。 单脉冲测角技术用于扫描雷达前视成像可有效提高图像的清晰度,但单个脉冲对同分辨单元多目标测角时会发生角闪烁现象,造成图像模糊。该文提出了一种基于单脉冲雷达和差通道多普勒估计的前视成像算法,利用目标和平台之间相对运动引起的多普勒梯度差异实现同分辨单元内不同方向目标的分离,然后在多普勒域采用和差比幅测角(SDAC)技术测量目标的方位角,完成能量投影。为提高测角精度,进一步提出了采用调频Z变换(CZT)重建和差多普勒估计并进行比幅测角的算法。点目标仿真实验结果表明,所提出的算法在前斜视方向具有分离多目标的能力,对实测数据成像结果验证了基于CZT的成像算法相比传统算法能显著提高对场景成像的轮廓清晰度。
单脉冲测角技术用于扫描雷达前视成像可有效提高图像的清晰度,但单个脉冲对同分辨单元多目标测角时会发生角闪烁现象,造成图像模糊。该文提出了一种基于单脉冲雷达和差通道多普勒估计的前视成像算法,利用目标和平台之间相对运动引起的多普勒梯度差异实现同分辨单元内不同方向目标的分离,然后在多普勒域采用和差比幅测角(SDAC)技术测量目标的方位角,完成能量投影。为提高测角精度,进一步提出了采用调频Z变换(CZT)重建和差多普勒估计并进行比幅测角的算法。点目标仿真实验结果表明,所提出的算法在前斜视方向具有分离多目标的能力,对实测数据成像结果验证了基于CZT的成像算法相比传统算法能显著提高对场景成像的轮廓清晰度。 单脉冲测角技术用于扫描雷达前视成像可有效提高图像的清晰度,但单个脉冲对同分辨单元多目标测角时会发生角闪烁现象,造成图像模糊。该文提出了一种基于单脉冲雷达和差通道多普勒估计的前视成像算法,利用目标和平台之间相对运动引起的多普勒梯度差异实现同分辨单元内不同方向目标的分离,然后在多普勒域采用和差比幅测角(SDAC)技术测量目标的方位角,完成能量投影。为提高测角精度,进一步提出了采用调频Z变换(CZT)重建和差多普勒估计并进行比幅测角的算法。点目标仿真实验结果表明,所提出的算法在前斜视方向具有分离多目标的能力,对实测数据成像结果验证了基于CZT的成像算法相比传统算法能显著提高对场景成像的轮廓清晰度。





2021, 10(1): 143-158.
摘要:
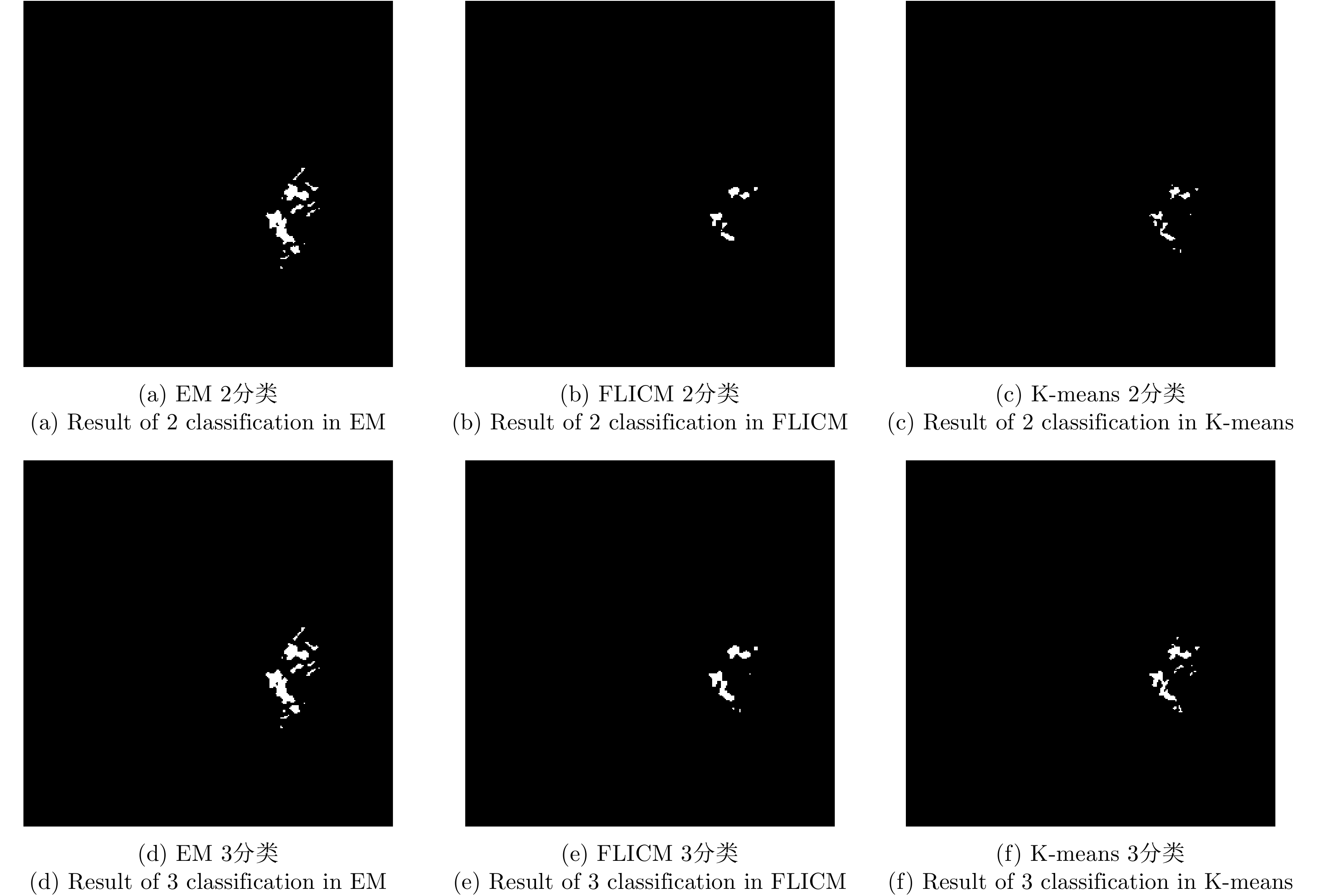
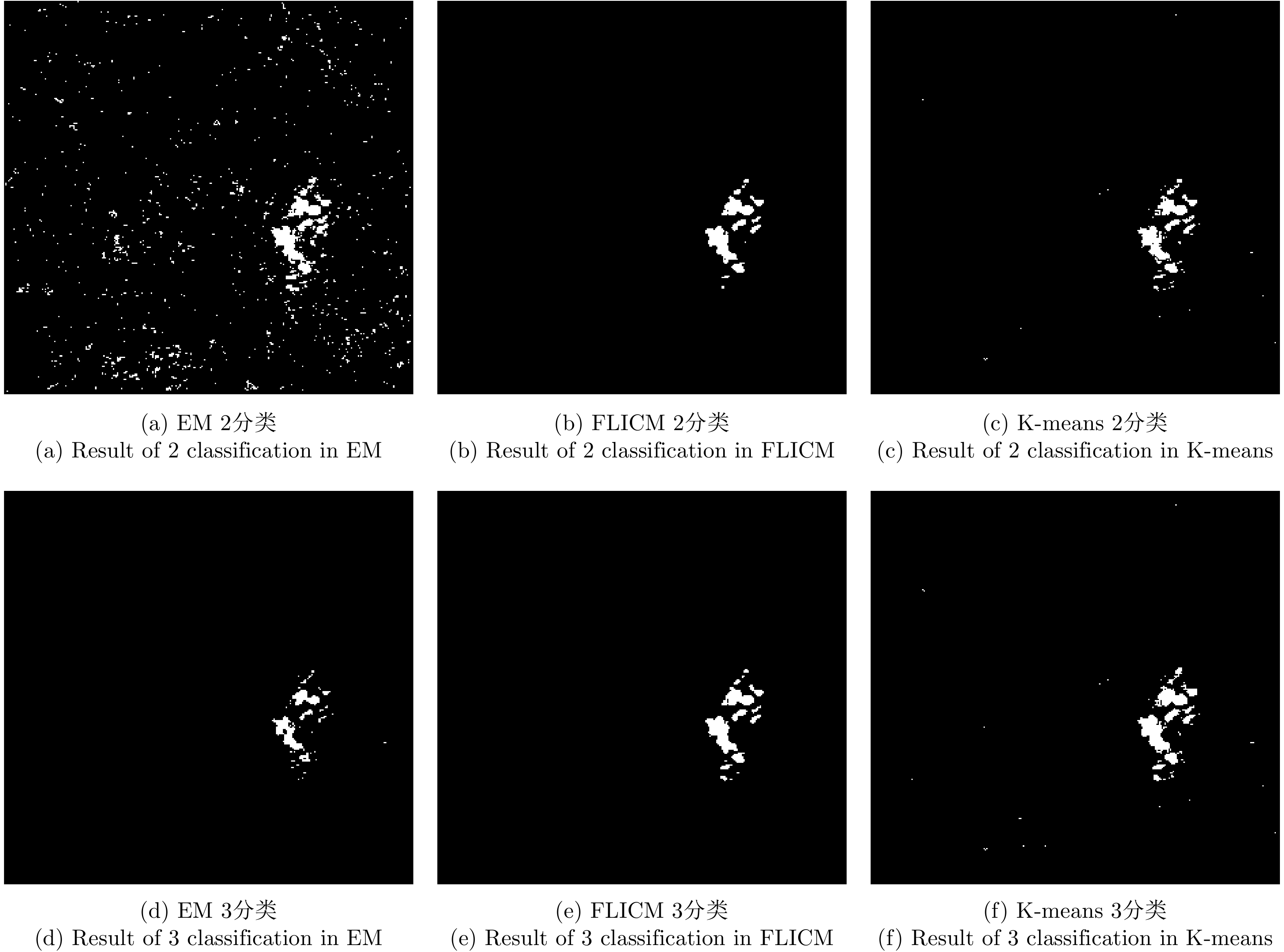
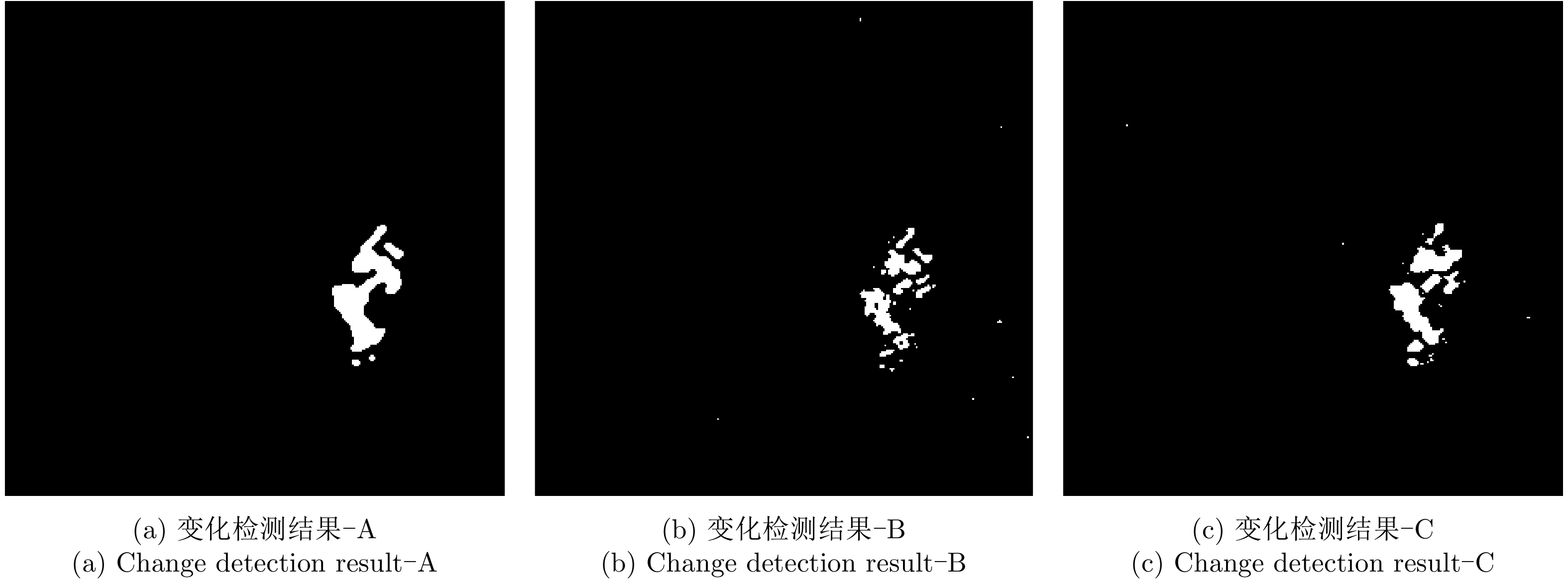
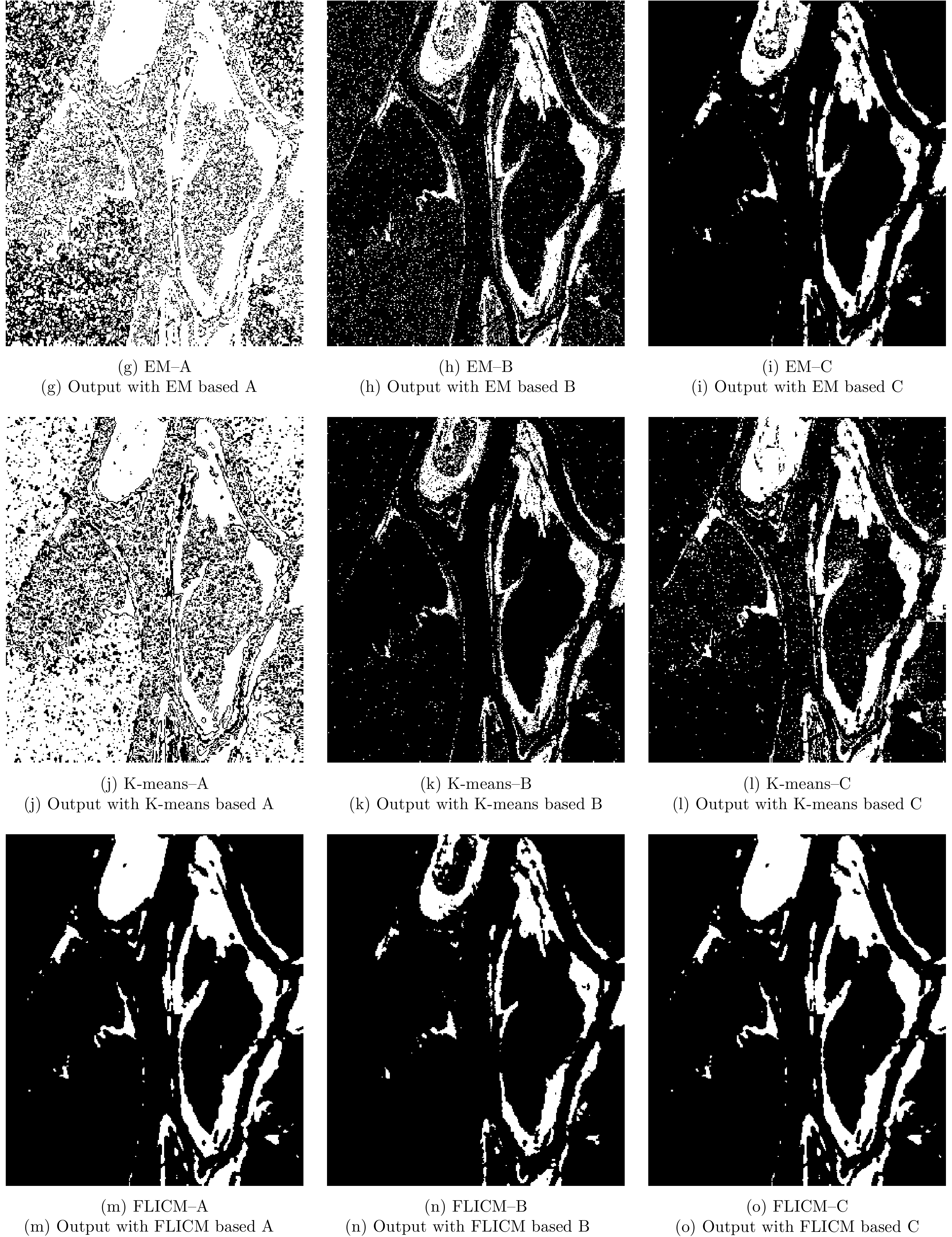
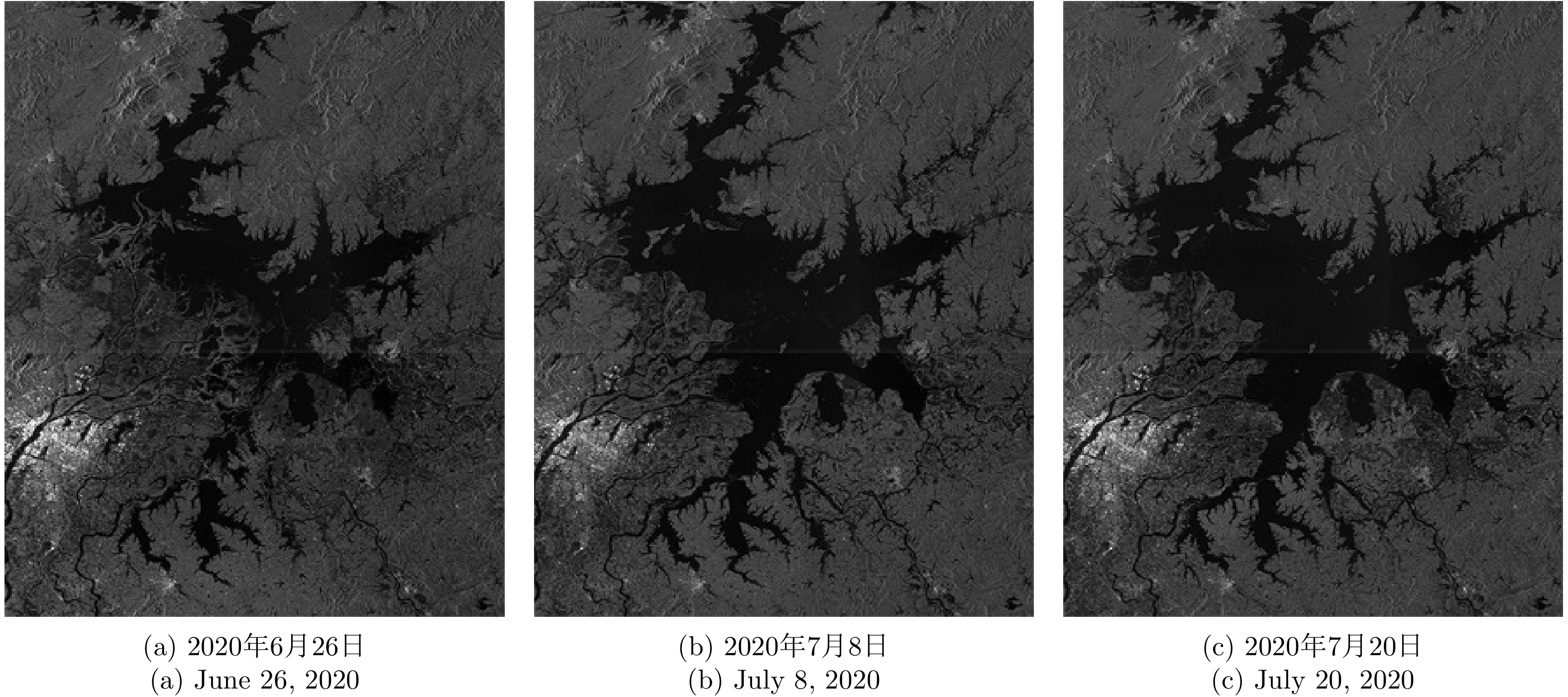
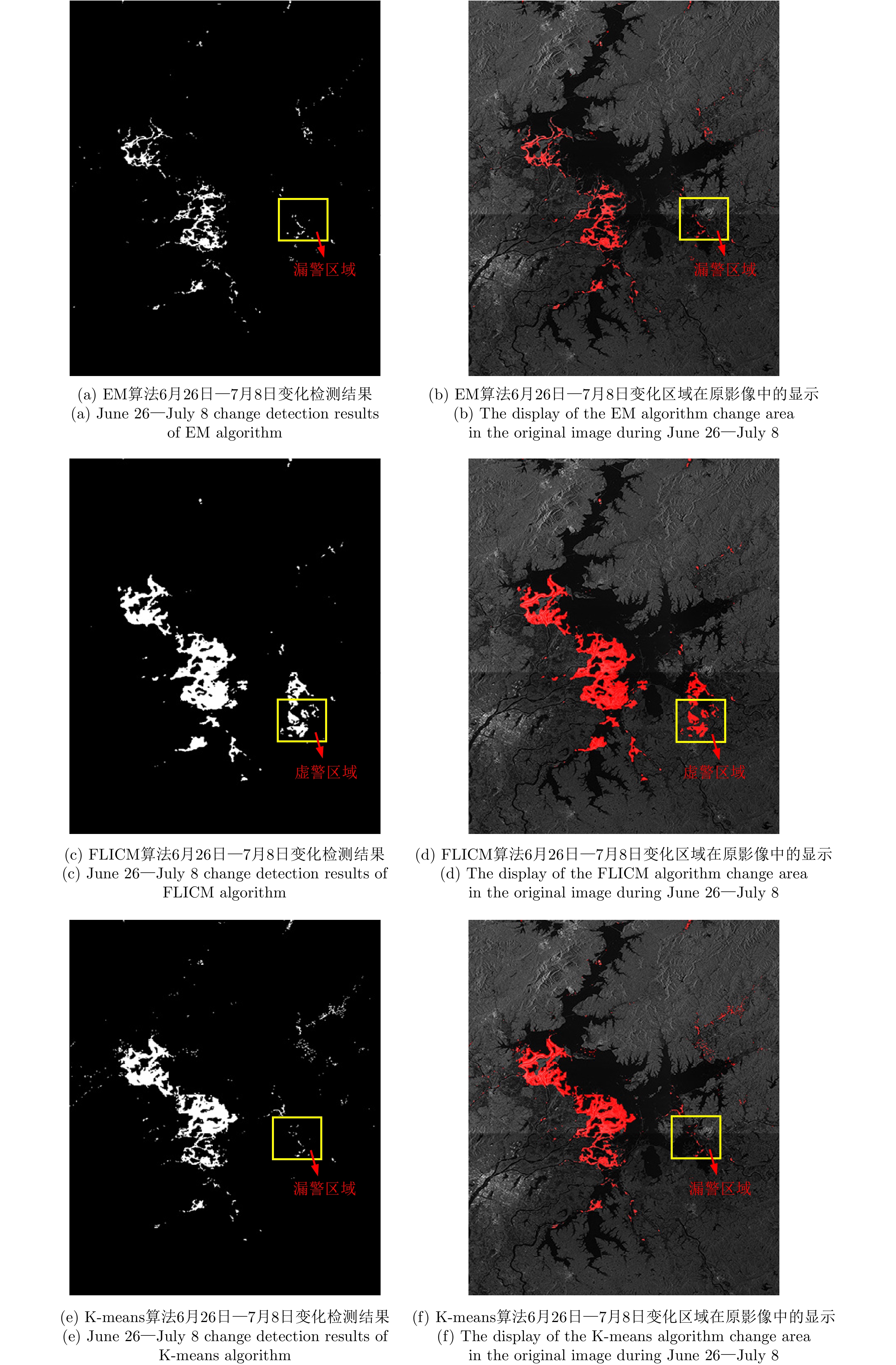
由于洪灾区域的地物散射特性受环境影响会发生改变,在对该区域合成孔径雷达(SAR)图像进行变化检测时会使检测结果的错误率提高,而且用单一方法得到的差异图变化检测结果精度较低。针对上述问题,该文提出一种基于融合差异图的变化检测方法,该方法通过构造基于改进相对熵与均值比的融合差异图,综合了熵值差异图的区域敏感性和均值差异图的区域保持性的优势。首先,利用皮尔逊相关系数对模糊局部信息C均值聚类(FLICM)方法的初始聚类结果进行二次分类,再将二次分类结果作为图像初始分割,最后利用迭代条件模型和马尔科夫随机场(ICM-MRF)获得图像的最终分割结果。为了验证所提方法的有效性,该文使用瑞士Bern地区在1999年4月和5月的ERS-2遥感数据以及加拿大Ottawa地区在1997年5月和8月的Radarsat遥感数据进行实验,并用该方法对中国鄱阳湖地区2020年6月和7月的Sentinel-1-A遥感数据进行了洪灾检测实验,估计了鄱阳湖附近区域洪灾前后的受灾范围和变化趋势。实验结果表明该文算法总体检测误差较低,一定程度上降低了检测结果的错误率,提高了检测结果的精度。 由于洪灾区域的地物散射特性受环境影响会发生改变,在对该区域合成孔径雷达(SAR)图像进行变化检测时会使检测结果的错误率提高,而且用单一方法得到的差异图变化检测结果精度较低。针对上述问题,该文提出一种基于融合差异图的变化检测方法,该方法通过构造基于改进相对熵与均值比的融合差异图,综合了熵值差异图的区域敏感性和均值差异图的区域保持性的优势。首先,利用皮尔逊相关系数对模糊局部信息C均值聚类(FLICM)方法的初始聚类结果进行二次分类,再将二次分类结果作为图像初始分割,最后利用迭代条件模型和马尔科夫随机场(ICM-MRF)获得图像的最终分割结果。为了验证所提方法的有效性,该文使用瑞士Bern地区在1999年4月和5月的ERS-2遥感数据以及加拿大Ottawa地区在1997年5月和8月的Radarsat遥感数据进行实验,并用该方法对中国鄱阳湖地区2020年6月和7月的Sentinel-1-A遥感数据进行了洪灾检测实验,估计了鄱阳湖附近区域洪灾前后的受灾范围和变化趋势。实验结果表明该文算法总体检测误差较低,一定程度上降低了检测结果的错误率,提高了检测结果的精度。
由于洪灾区域的地物散射特性受环境影响会发生改变,在对该区域合成孔径雷达(SAR)图像进行变化检测时会使检测结果的错误率提高,而且用单一方法得到的差异图变化检测结果精度较低。针对上述问题,该文提出一种基于融合差异图的变化检测方法,该方法通过构造基于改进相对熵与均值比的融合差异图,综合了熵值差异图的区域敏感性和均值差异图的区域保持性的优势。首先,利用皮尔逊相关系数对模糊局部信息C均值聚类(FLICM)方法的初始聚类结果进行二次分类,再将二次分类结果作为图像初始分割,最后利用迭代条件模型和马尔科夫随机场(ICM-MRF)获得图像的最终分割结果。为了验证所提方法的有效性,该文使用瑞士Bern地区在1999年4月和5月的ERS-2遥感数据以及加拿大Ottawa地区在1997年5月和8月的Radarsat遥感数据进行实验,并用该方法对中国鄱阳湖地区2020年6月和7月的Sentinel-1-A遥感数据进行了洪灾检测实验,估计了鄱阳湖附近区域洪灾前后的受灾范围和变化趋势。实验结果表明该文算法总体检测误差较低,一定程度上降低了检测结果的错误率,提高了检测结果的精度。 由于洪灾区域的地物散射特性受环境影响会发生改变,在对该区域合成孔径雷达(SAR)图像进行变化检测时会使检测结果的错误率提高,而且用单一方法得到的差异图变化检测结果精度较低。针对上述问题,该文提出一种基于融合差异图的变化检测方法,该方法通过构造基于改进相对熵与均值比的融合差异图,综合了熵值差异图的区域敏感性和均值差异图的区域保持性的优势。首先,利用皮尔逊相关系数对模糊局部信息C均值聚类(FLICM)方法的初始聚类结果进行二次分类,再将二次分类结果作为图像初始分割,最后利用迭代条件模型和马尔科夫随机场(ICM-MRF)获得图像的最终分割结果。为了验证所提方法的有效性,该文使用瑞士Bern地区在1999年4月和5月的ERS-2遥感数据以及加拿大Ottawa地区在1997年5月和8月的Radarsat遥感数据进行实验,并用该方法对中国鄱阳湖地区2020年6月和7月的Sentinel-1-A遥感数据进行了洪灾检测实验,估计了鄱阳湖附近区域洪灾前后的受灾范围和变化趋势。实验结果表明该文算法总体检测误差较低,一定程度上降低了检测结果的错误率,提高了检测结果的精度。





2021, 10(1): 159-172.
摘要:
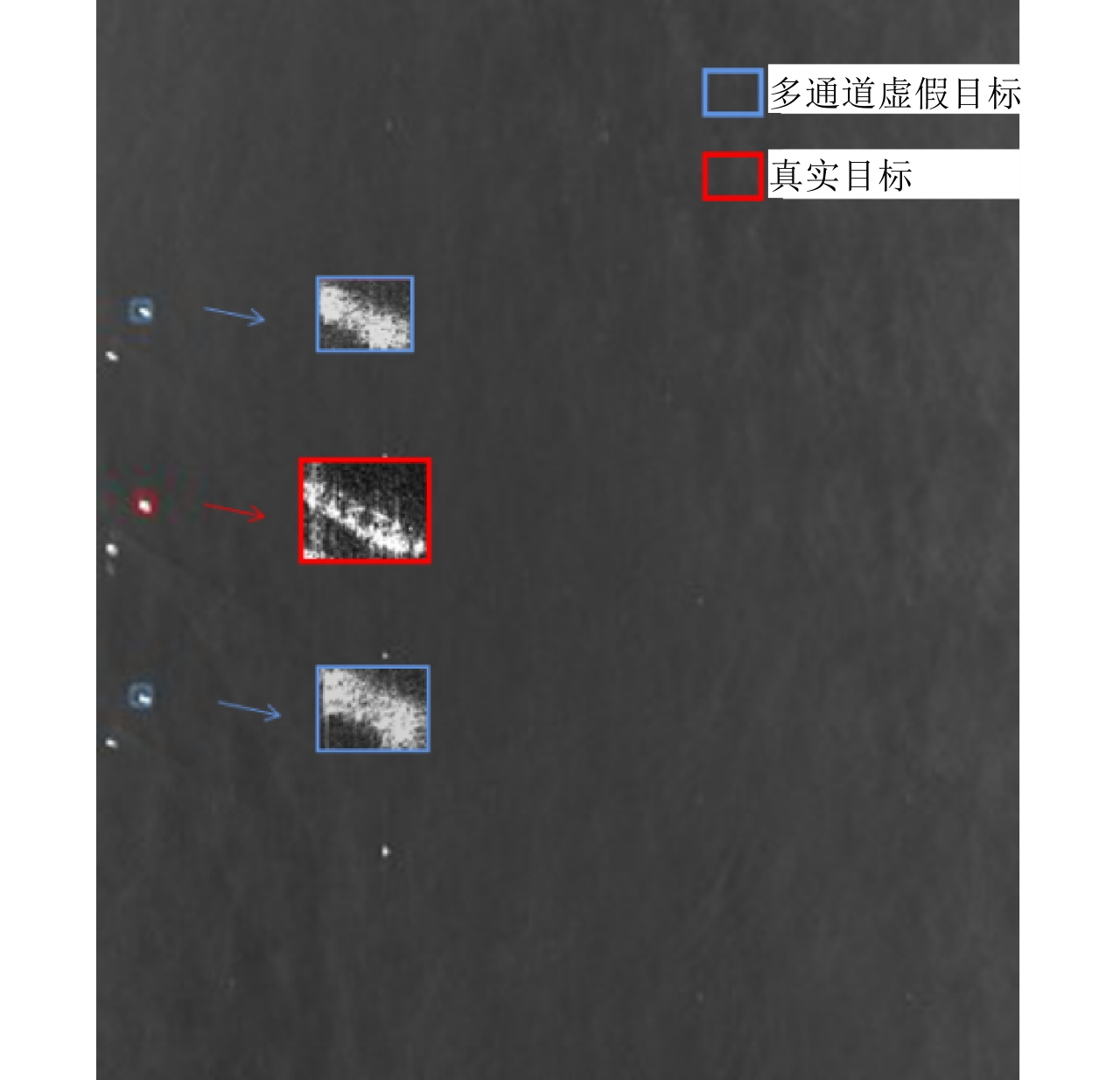
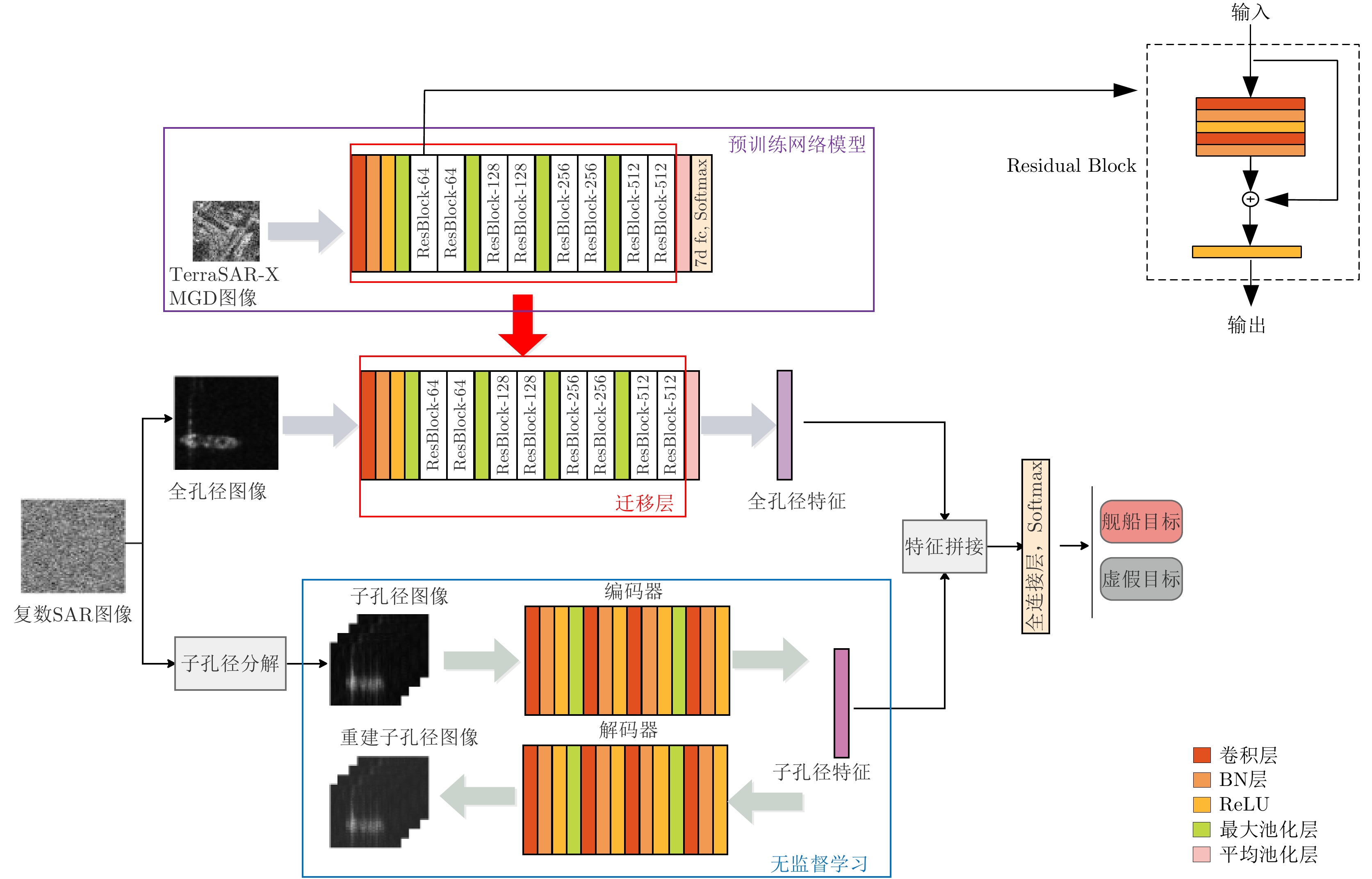
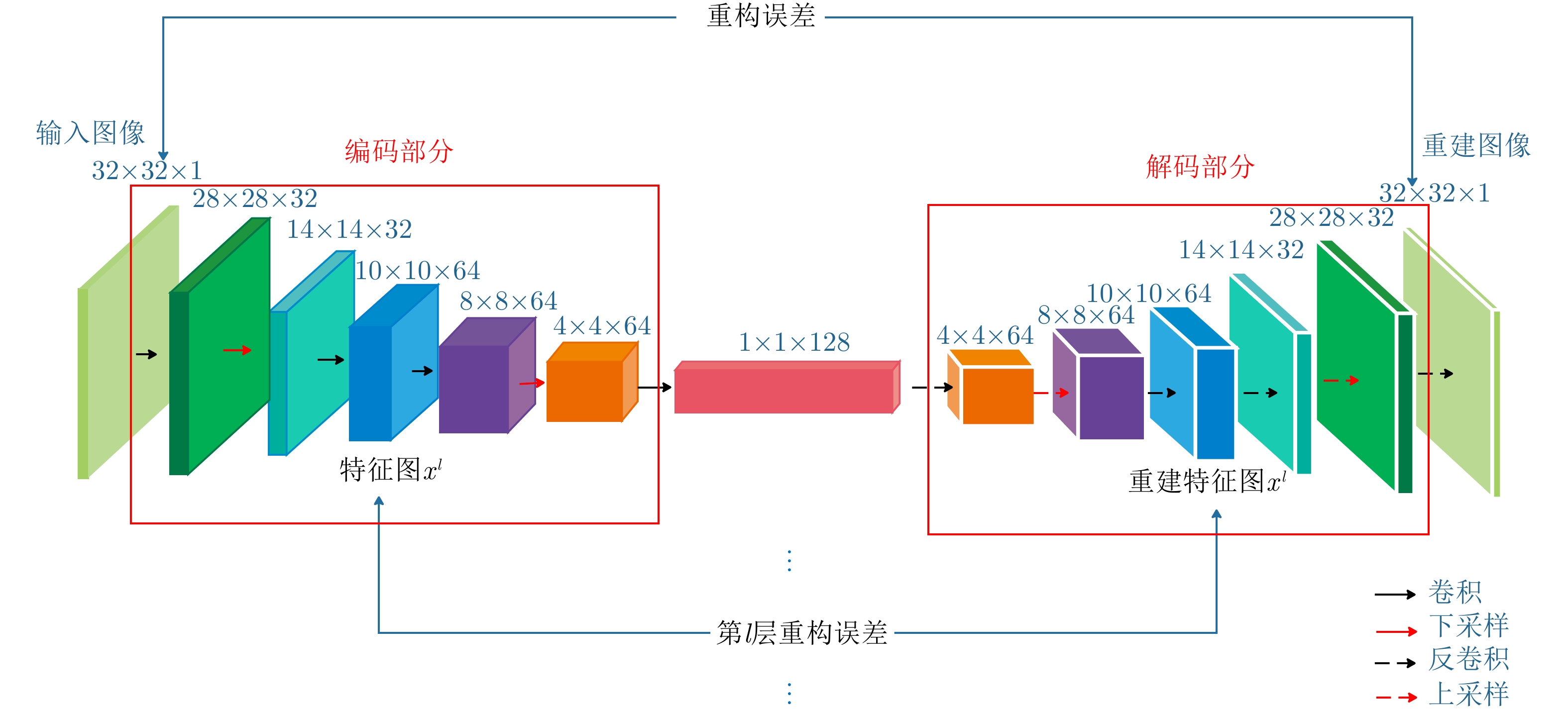
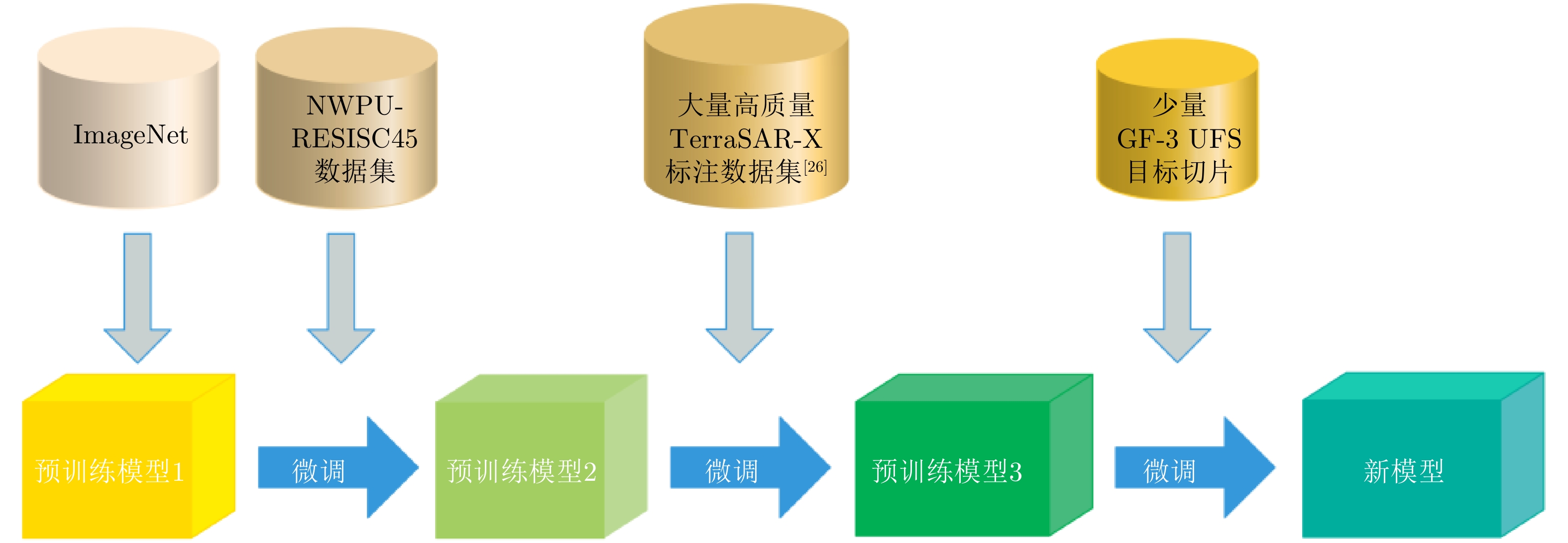
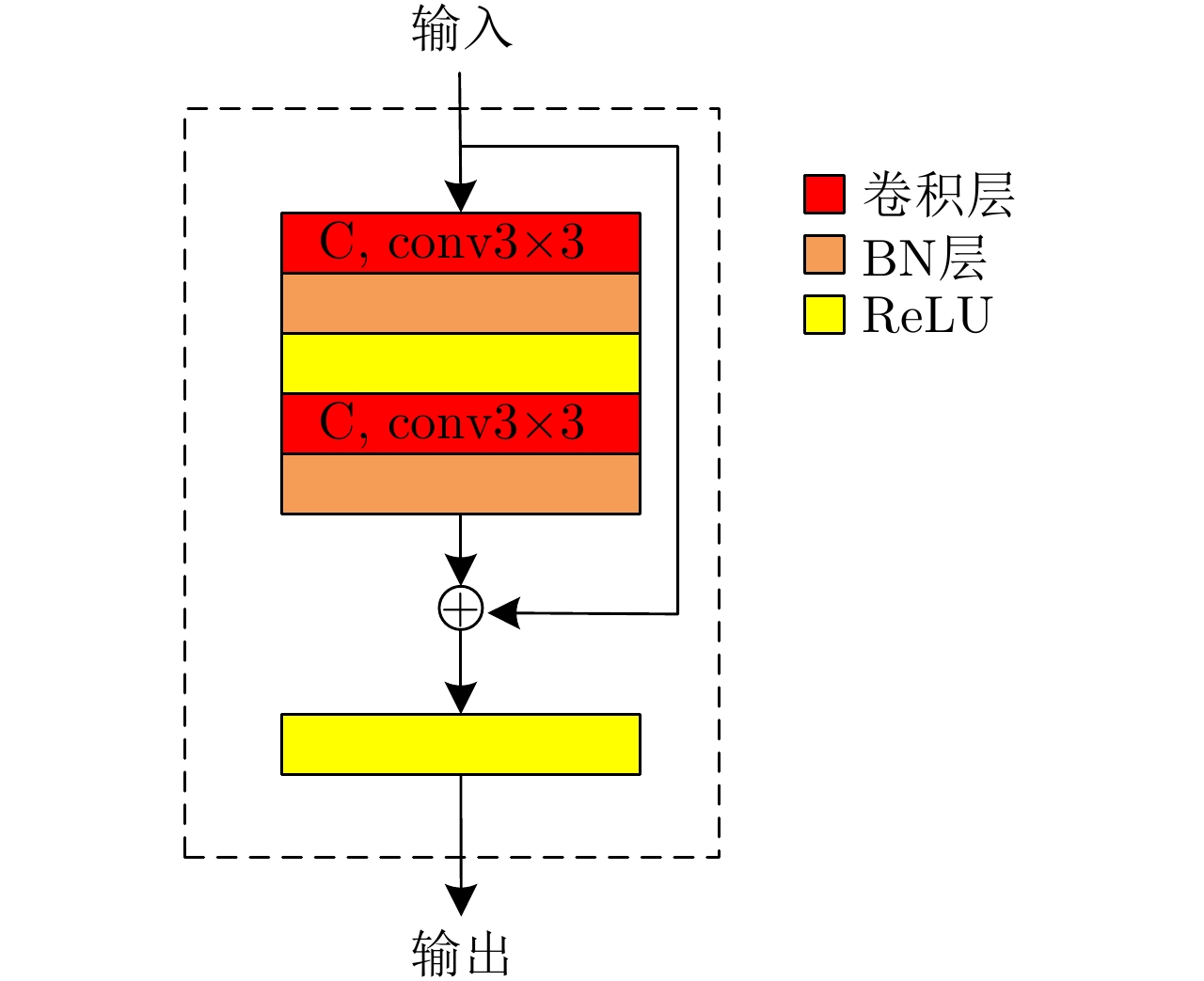
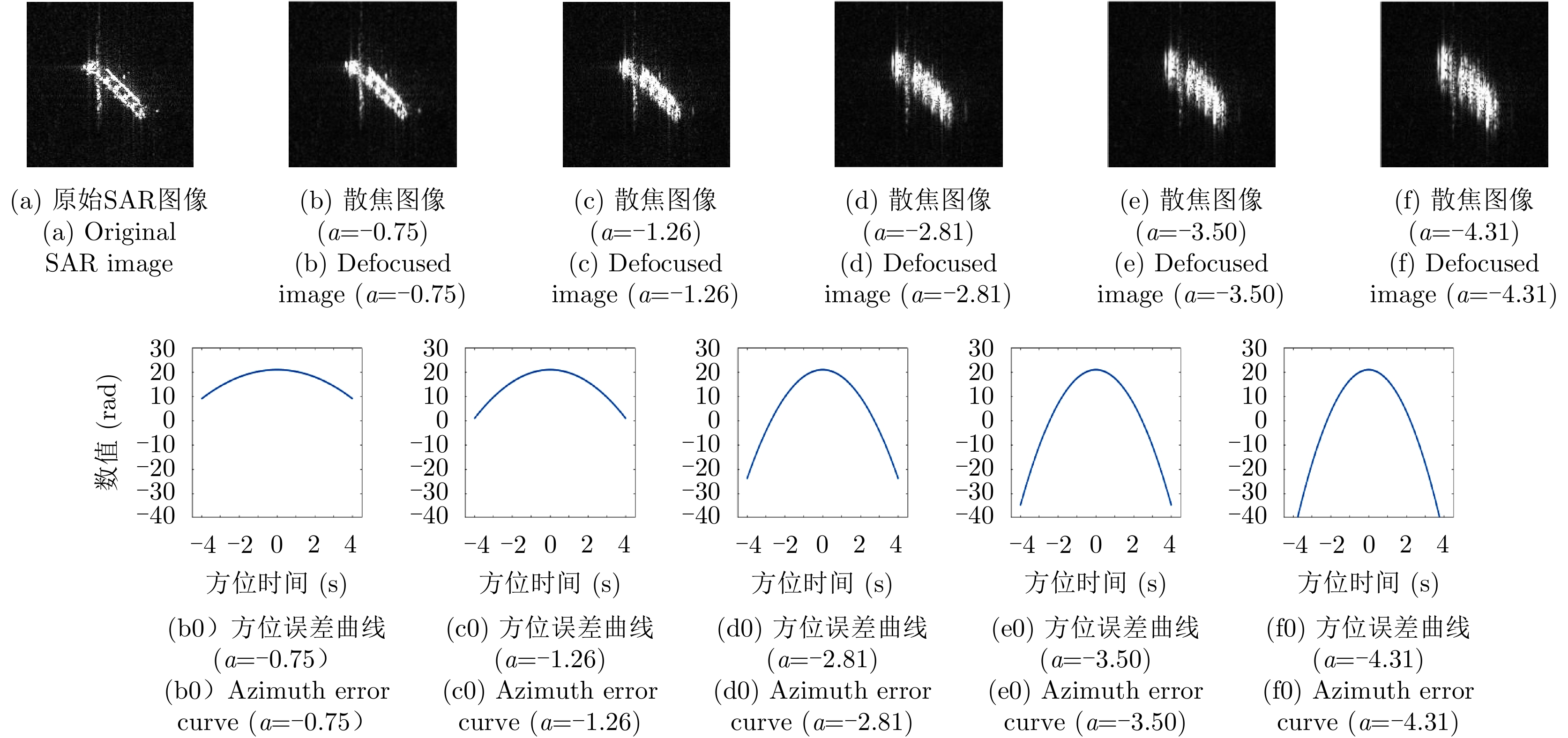
SAR多通道引起的虚假目标与散焦的船舶目标形状纹理特征非常相似,在全孔径SAR图像中难以区分。针对此类虚假目标造成的虚警问题,该文提出一种基于子孔径与全孔径特征学习的SAR多通道虚假目标鉴别方法。首先,对复数SAR图像进行幅值计算得到幅度图像,利用迁移学习方法提取幅度图像中的全孔径特征;接着,对复数SAR图像进行子孔径分解获得一系列子孔径图像,然后用栈式卷积自编码器(SCAE)提取子孔径图像中的子孔径特征;最后,将子孔径和全孔径特征进行串联并利用联合特征进行分类。在高分三号超精细条带模式SAR图像上的实验结果表明,该方法可以有效的鉴别船舶目标和多通道虚假目标,与仅使用全孔径特征学习的方法相比准确率提升了16.32%。 SAR多通道引起的虚假目标与散焦的船舶目标形状纹理特征非常相似,在全孔径SAR图像中难以区分。针对此类虚假目标造成的虚警问题,该文提出一种基于子孔径与全孔径特征学习的SAR多通道虚假目标鉴别方法。首先,对复数SAR图像进行幅值计算得到幅度图像,利用迁移学习方法提取幅度图像中的全孔径特征;接着,对复数SAR图像进行子孔径分解获得一系列子孔径图像,然后用栈式卷积自编码器(SCAE)提取子孔径图像中的子孔径特征;最后,将子孔径和全孔径特征进行串联并利用联合特征进行分类。在高分三号超精细条带模式SAR图像上的实验结果表明,该方法可以有效的鉴别船舶目标和多通道虚假目标,与仅使用全孔径特征学习的方法相比准确率提升了16.32%。
SAR多通道引起的虚假目标与散焦的船舶目标形状纹理特征非常相似,在全孔径SAR图像中难以区分。针对此类虚假目标造成的虚警问题,该文提出一种基于子孔径与全孔径特征学习的SAR多通道虚假目标鉴别方法。首先,对复数SAR图像进行幅值计算得到幅度图像,利用迁移学习方法提取幅度图像中的全孔径特征;接着,对复数SAR图像进行子孔径分解获得一系列子孔径图像,然后用栈式卷积自编码器(SCAE)提取子孔径图像中的子孔径特征;最后,将子孔径和全孔径特征进行串联并利用联合特征进行分类。在高分三号超精细条带模式SAR图像上的实验结果表明,该方法可以有效的鉴别船舶目标和多通道虚假目标,与仅使用全孔径特征学习的方法相比准确率提升了16.32%。 SAR多通道引起的虚假目标与散焦的船舶目标形状纹理特征非常相似,在全孔径SAR图像中难以区分。针对此类虚假目标造成的虚警问题,该文提出一种基于子孔径与全孔径特征学习的SAR多通道虚假目标鉴别方法。首先,对复数SAR图像进行幅值计算得到幅度图像,利用迁移学习方法提取幅度图像中的全孔径特征;接着,对复数SAR图像进行子孔径分解获得一系列子孔径图像,然后用栈式卷积自编码器(SCAE)提取子孔径图像中的子孔径特征;最后,将子孔径和全孔径特征进行串联并利用联合特征进行分类。在高分三号超精细条带模式SAR图像上的实验结果表明,该方法可以有效的鉴别船舶目标和多通道虚假目标,与仅使用全孔径特征学习的方法相比准确率提升了16.32%。






2021, 10(1): 173-182.
摘要:
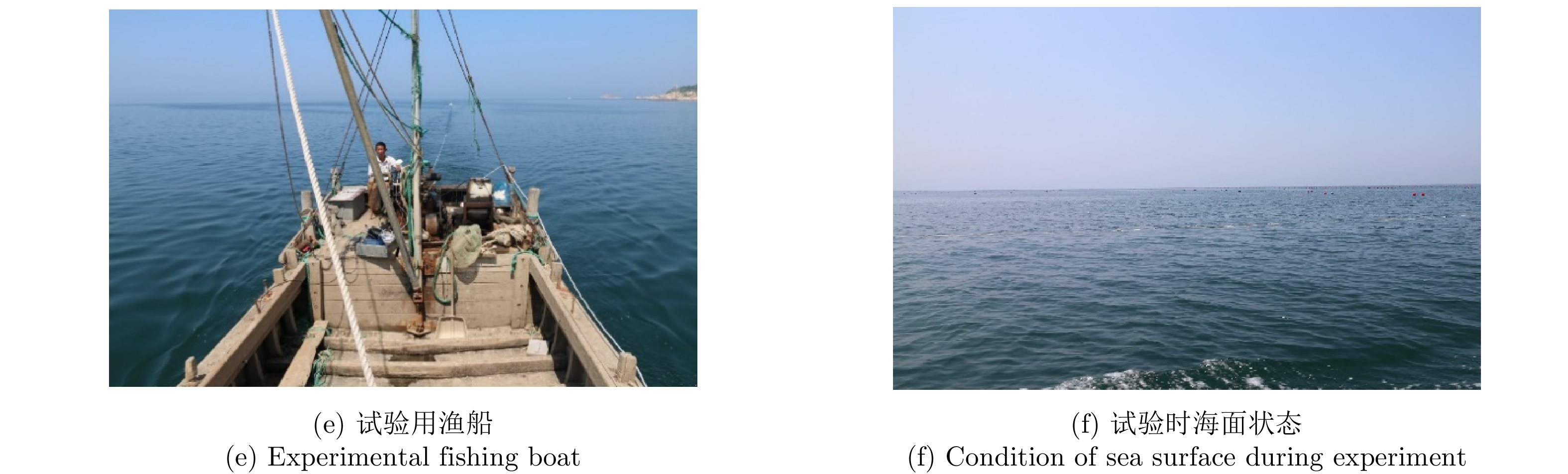
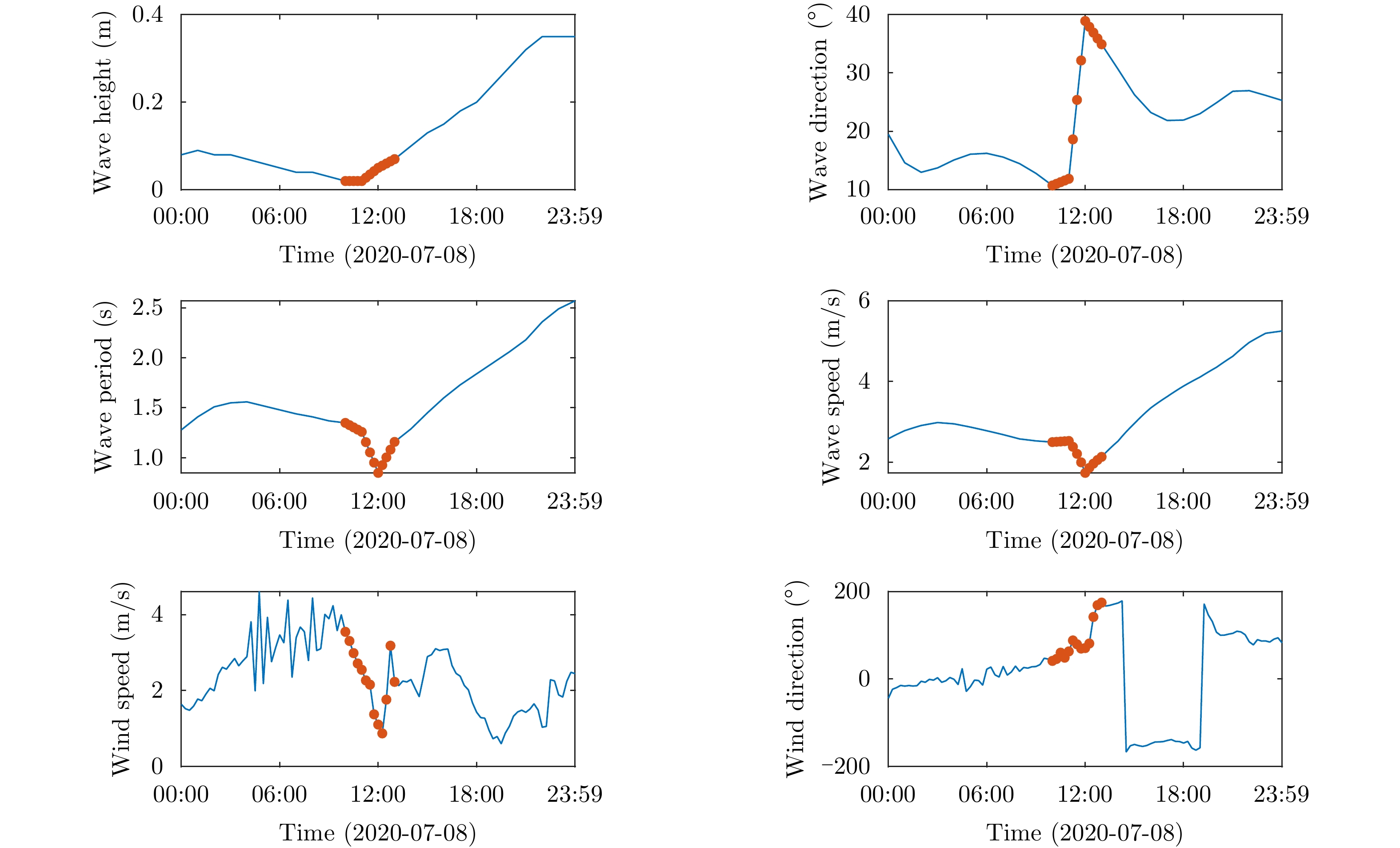
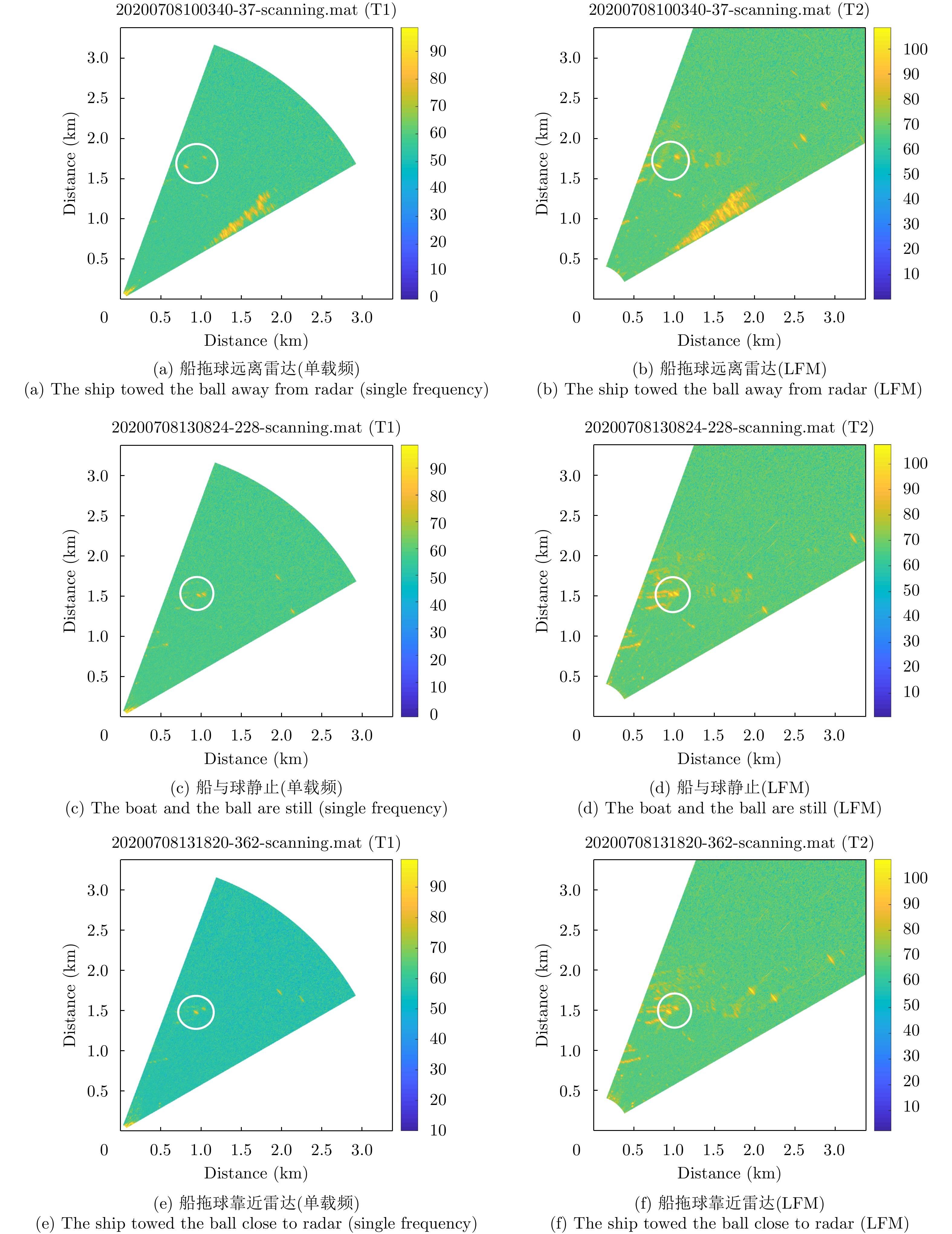
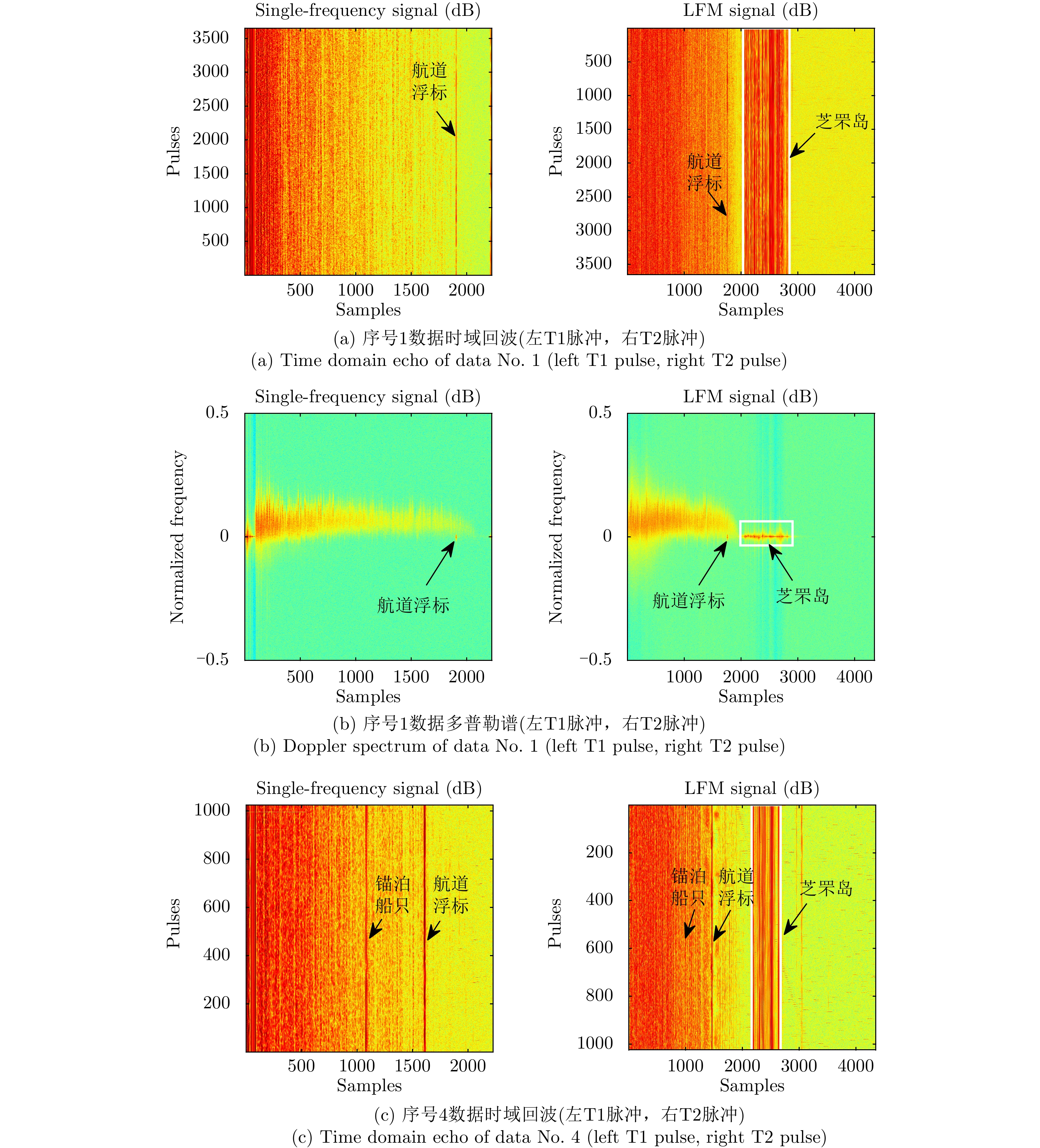
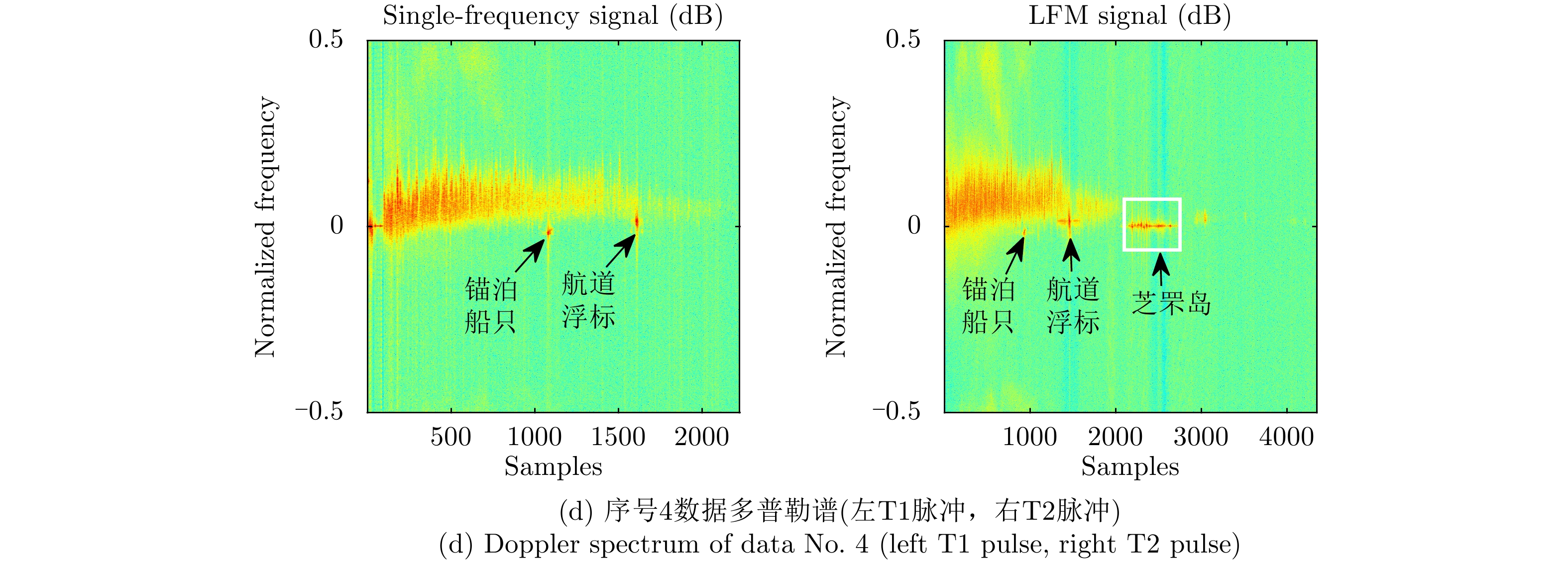
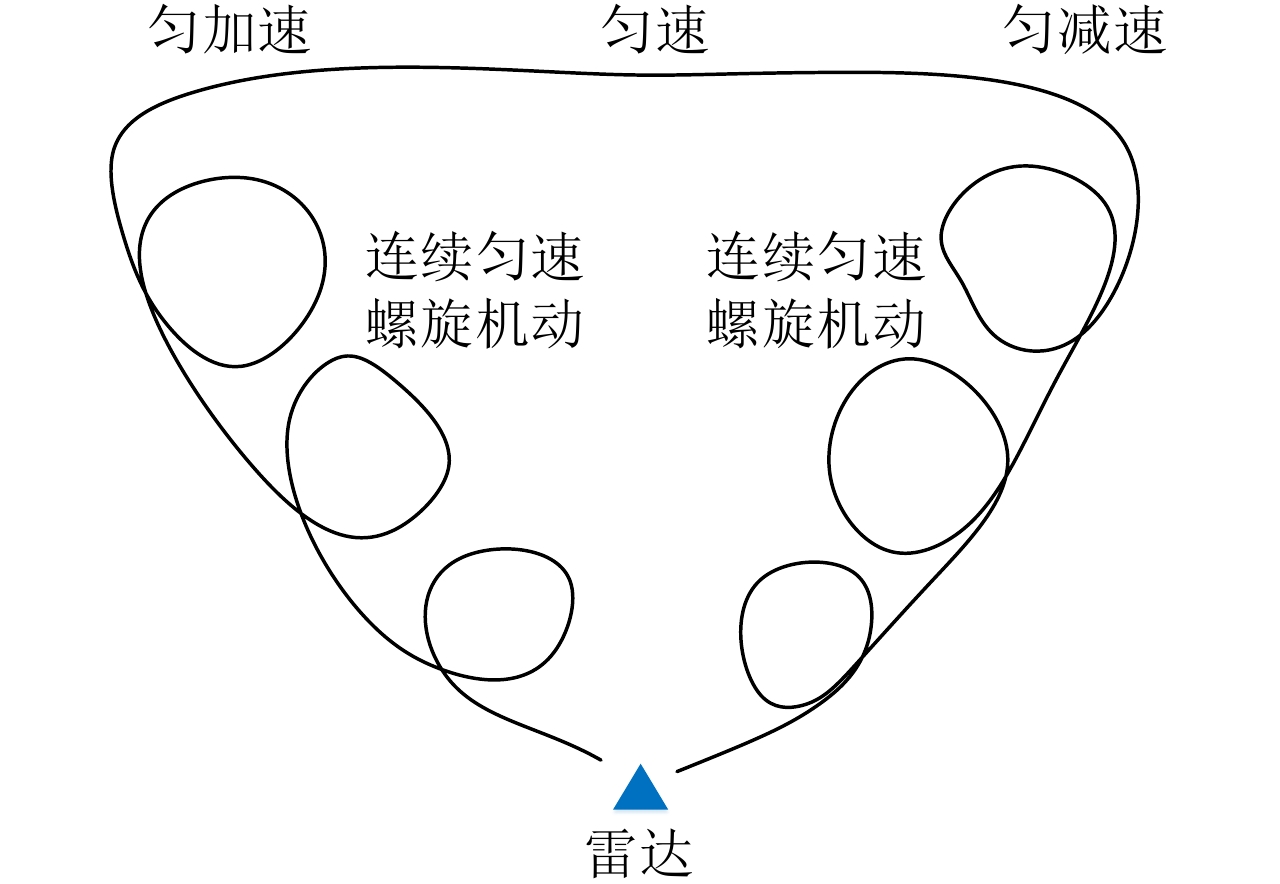
针对雷达海上目标探测关键技术攻关对雷达实测数据的迫切需求,2019年提出了“雷达对海探测数据共享计划”。该计划旨在通过开展雷达试验获取数据,公开共享。2020年度该计划继续推进,开展了雷达目标RCS定标、不同海况海杂波与目标探测、海上机动目标检测跟踪3个方面的多次试验,获取了不同距离处不锈钢球定标体的雷达慢速扫描模式测量数据、不同方位下海杂波凝视模式测量数据、海上目标凝视模式探测数据、海上机动快艇雷达扫描模式测量数据,并同步获取了风和浪要素数据、目标AIS数据、可见光/红外数据等配合传感器数据。 针对雷达海上目标探测关键技术攻关对雷达实测数据的迫切需求,2019年提出了“雷达对海探测数据共享计划”。该计划旨在通过开展雷达试验获取数据,公开共享。2020年度该计划继续推进,开展了雷达目标RCS定标、不同海况海杂波与目标探测、海上机动目标检测跟踪3个方面的多次试验,获取了不同距离处不锈钢球定标体的雷达慢速扫描模式测量数据、不同方位下海杂波凝视模式测量数据、海上目标凝视模式探测数据、海上机动快艇雷达扫描模式测量数据,并同步获取了风和浪要素数据、目标AIS数据、可见光/红外数据等配合传感器数据。
针对雷达海上目标探测关键技术攻关对雷达实测数据的迫切需求,2019年提出了“雷达对海探测数据共享计划”。该计划旨在通过开展雷达试验获取数据,公开共享。2020年度该计划继续推进,开展了雷达目标RCS定标、不同海况海杂波与目标探测、海上机动目标检测跟踪3个方面的多次试验,获取了不同距离处不锈钢球定标体的雷达慢速扫描模式测量数据、不同方位下海杂波凝视模式测量数据、海上目标凝视模式探测数据、海上机动快艇雷达扫描模式测量数据,并同步获取了风和浪要素数据、目标AIS数据、可见光/红外数据等配合传感器数据。 针对雷达海上目标探测关键技术攻关对雷达实测数据的迫切需求,2019年提出了“雷达对海探测数据共享计划”。该计划旨在通过开展雷达试验获取数据,公开共享。2020年度该计划继续推进,开展了雷达目标RCS定标、不同海况海杂波与目标探测、海上机动目标检测跟踪3个方面的多次试验,获取了不同距离处不锈钢球定标体的雷达慢速扫描模式测量数据、不同方位下海杂波凝视模式测量数据、海上目标凝视模式探测数据、海上机动快艇雷达扫描模式测量数据,并同步获取了风和浪要素数据、目标AIS数据、可见光/红外数据等配合传感器数据。






 微信 | 公众平台
微信 | 公众平台 

