
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
-
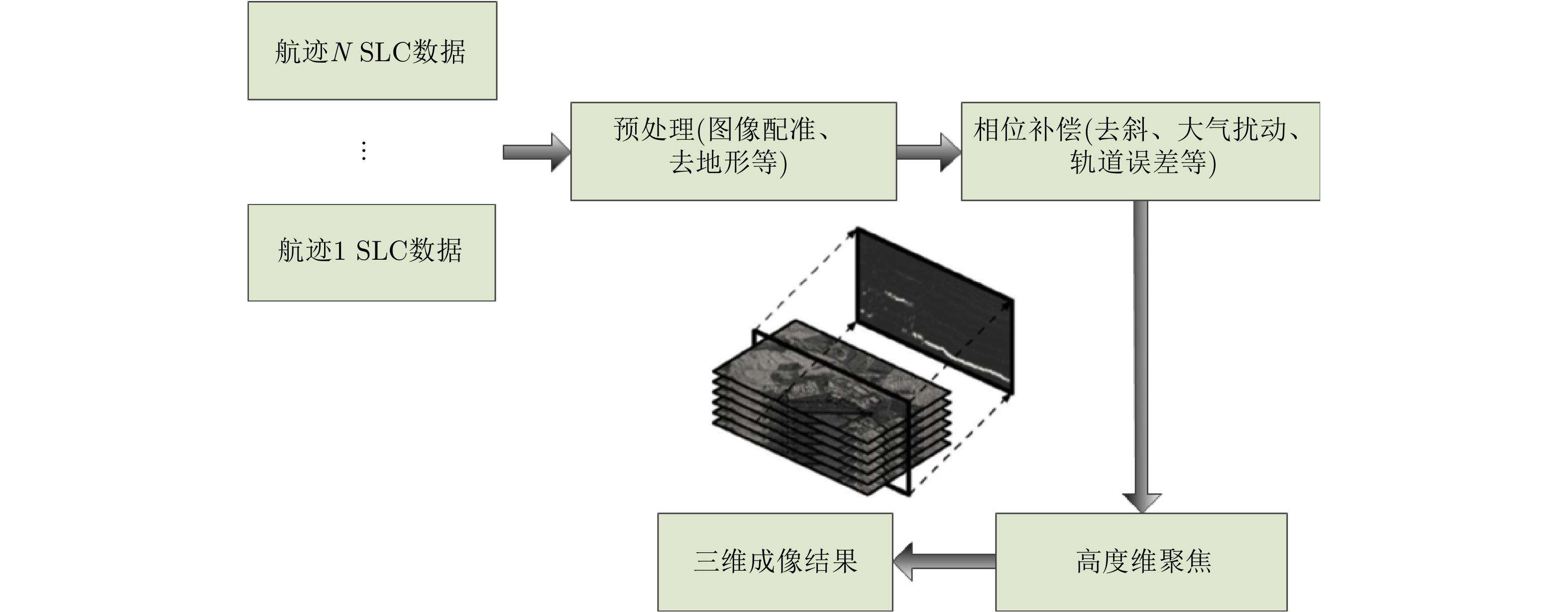
摘要: 传统的合成孔径雷达(SAR)成像是将现实中的三维场景投影到方位-斜距向二维平面的一系列处理过程,损失了三维空间的高度维信息。随着SAR系统及处理技术的发展,层析SAR系统通过沿高度向的多个数据获取构造高度维合成孔径,利用阵列信号处理方法实现目标高分辨率三维成像,对观测场景进行三维重建,获取地面目标的垂直结构信息,对植被监测、雪冰探测、城市建模等应用具有重要应用价值。该文基于层析SAR观测机理,分析了配准、去平地效应、相位补偿、高度维聚焦等三维成像关键环节以及算法研究现状,着重阐述了层析SAR在植被、雪冰、城市信息提取方面的应用,介绍了过去20年中相关的实验结果,讨论了不同平台下植被高度与冠层结构、冰川厚度与内部结构、积雪厚度与分层、城市区三维重建与形变监测等方面的应用潜力与存在的问题,并对其发展趋势进行了展望。Abstract: Traditional Synthetic Aperture Radar (SAR) imaging is the projection of a real three-dimensional scene onto a two-dimensional domain of azimuth and slant range, which results in the loss of the high-dimensional information. With the advancement of SAR system and its processing technology, tomographic SAR systems obtain multiple data along the height direction to construct the high-dimensional synthetic aperture, and use array signal processing methods to achieve high-resolution three-dimensional images. It can reconstruct the observation scene and extract vertical structure information of the ground target, which is very important for vegetation monitoring, snow and ice detecting, and urban modeling. This paper analyzed the key steps of three-dimensional imaging, such as image registration, flat-earth phase removal, phase compensation, and the three-dimensional focusing, as well as the current research status of each step based on the observation mechanism of tomographic SAR system. This paper particularly focuses on using tomographic SAR on the application of vegetation, glacier, snow, and urban information. The most relevant experimental results in the past two decades were introduced. Further, the application potential and existing problems related to the vegetation height with canopy structure, glacier thickness with internal structure, snow thickness with stratification, and urban three-dimensional reconstruction with deformation monitoring under different platforms are discussed. Finally, the prospects of TomoSAR in the primary applications field are presented.
-

图 3 差分干涉相位,其时间基线和空间基线是490 d和97.7 m
Figure 3. Differential interferograms with temporal baseline of 490 days and spatial baseline of 97.7 m
-
[1] 吴一戎. 多维度合成孔径雷达成像概念[J]. 雷达学报, 2013, 2(2): 135–142. doi: 10.3724/SP.J.1300.2013.13047WU Yirong. Concept of multidimensional space joint-observation SAR[J]. Journal of Radars, 2013, 2(2): 135–142. doi: 10.3724/SP.J.1300.2013.13047 [2] GINI F and LOMBARDINI F. Multibaseline cross-track SAR interferometry: A signal processing perspective[J]. IEEE Aerospace and Electronic Systems Magazine, 2005, 20(8): 71–93. doi: 10.1109/MAES.2005.1499278 [3] KNAELL K. Three-dimensional SAR from curvilinear apertures[C]. 1996 IEEE National Radar Conference, Ann Arbor, USA, 1996: 220–225. [4] FORNARO G, LOMBARDINI F, PAUCIULLO A, et al. Tomographic processing of interferometric SAR data: Developments, applications, and future research perspectives[J]. IEEE Signal Processing Magazine, 2014, 31(4): 41–50. doi: 10.1109/MSP.2014.2312073 [5] REIGBER A and MOREIRA A. First demonstration of airborne SAR tomography using multibaseline L-band data[J]. IEEE Transactions on Geoscience and Remote Sensing, 2000, 38(5): 2142–2152. doi: 10.1109/36.868873 [6] FORNARO G, LOMBARDINI F, and SERAFINO F. Three-dimensional multipass SAR focusing: Experiments with long-term spaceborne data[J]. IEEE Transactions on Geoscience and Remote Sensing, 2005, 43(4): 702–714. doi: 10.1109/TGRS.2005.843567 [7] QUEGAN S, LE TOAN T, CHAVE J, et al. The European space agency BIOMASS mission: Measuring forest above-ground biomass from space[J]. Remote Sensing of Environment, 2019, 227: 44–60. doi: 10.1016/j.rse.2019.03.032 [8] TELLO M, CAZCARRA-BES V, PARDINI M, et al. Forest structure characterization from SAR tomography at L-band[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2018, 11(10): 3402–3414. doi: 10.1109/JSTARS.2018.2859050 [9] AGHABABAEI H, FERRAIOLI G, FERRO-FAMIL L, et al. Forest SAR tomography: Principles and applications[J]. IEEE Geoscience and Remote Sensing Magazine, 2020, 8(2): 30–45. doi: 10.1109/MGRS.2019.2963093 [10] YITAYEW T G, FERRO-FAMIL L, ELTOFT T, et al. Tomographic imaging of fjord ice using a very high resolution ground-based SAR system[J]. IEEE Transactions on Geoscience and Remote Sensing, 2017, 55(2): 698–714. doi: 10.1109/TGRS.2016.2613900 [11] REKIOUA B, DAVY M, FERRO-FAMIL L, et al. Snowpack permittivity profile retrieval from tomographic SAR data[J]. Comptes Rendus Physique, 2017, 18(1): 57–65. doi: 10.1016/j.crhy.2015.12.016 [12] AGHABABAEE H, FERRAIOLI G, SCHIRINZI G, et al. Regularization of SAR tomography for 3-D height reconstruction in urban areas[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2019, 12(2): 648–659. doi: 10.1109/JSTARS.2018.2889428 [13] ZHU Xiaoxiang and BAMLER R. Superresolving SAR tomography for multidimensional imaging of urban areas: Compressive sensing-based TomoSAR inversion[J]. IEEE Signal Processing Magazine, 2014, 31(4): 51–58. doi: 10.1109/MSP.2014.2312098 [14] 丁赤飚, 仇晓兰, 徐丰, 等. 合成孔径雷达三维成像——从层析、阵列到微波视觉[J]. 雷达学报, 2019, 8(6): 693–709. doi: 10.12000/JR19090DING Chibiao, QIU Xiaolan, XU Feng, et al. Synthetic aperture radar three-dimensional imaging——from TomoSAR and array InSAR to microwave vision[J]. Journal of Radars, 2019, 8(6): 693–709. doi: 10.12000/JR19090 [15] 匡辉, 杨威, 王鹏波, 等. 多方位角多基线星载SAR三维成像方法研究[J]. 雷达学报, 2018, 7(6): 685–695. doi: 10.12000/JR18073KUANG Hui, YANG Wei, WANG Pengbo, et al. Three-dimensional imaging algorithm for multi-azimuth-angle multi-baseline spaceborne synthetic aperture radar[J]. Journal of Radars, 2018, 7(6): 685–695. doi: 10.12000/JR18073 [16] 张斌, 韦立登, 胡庆荣, 等. 基于四阶累积量的机载多基线SAR谱估计解叠掩方法[J]. 雷达学报, 2018, 7(6): 740–749. doi: 10.12000/JR18087ZHANG Bin, WEI Lideng, HU Qingrong, et al. Solution to layover problemin airborne multi-baseline SAR based on spectrum estimation with fourth-order cumulant[J]. Journal of Radars, 2018, 7(6): 740–749. doi: 10.12000/JR18087 [17] 张冰尘, 王万影, 毕辉, 等. 基于压缩多信号分类算法的森林区域极化SAR层析成像[J]. 电子与信息学报, 2015, 37(3): 625–630. doi: 10.11999/JEIT140584ZHANG Bingchen, WANG Wanying, BI Hui, et al. Polarimetric SAR tomography for forested areas based on compressive multiple signal classification[J]. Journal of Electronics &Information Technology, 2015, 37(3): 625–630. doi: 10.11999/JEIT140584 [18] 李文梅, 陈尔学, 李增元. 多基线干涉层析SAR提取森林树高方法研究[J]. 林业科学研究, 2014, 27(6): 815–821.LI Wenmei, CHEN Erxue, and LI Zengyuan. Approach for forest height extraction using multi-baseline interferometric tomographic SAR[J]. Forest Research, 2014, 27(6): 815–821. [19] 廖明生, 魏恋欢, 汪紫芸, 等. 压缩感知在城区高分辨率SAR层析成像中的应用[J]. 雷达学报, 2015, 4(2): 123–129. doi: 10.12000/JR15031LIAO Mingsheng, WEI Lianhuan, WANG Ziyun, et al. Compressive sensing in high-resolution 3D SAR tomography of urban scenarios[J]. Journal of Radars, 2015, 4(2): 123–129. doi: 10.12000/JR15031 [20] 秦斐, 梁兴东, 张福博, 等. 基于机器学习的阵列层析SAR建筑物目标提取方法[J]. 信号处理, 2019, 35(2): 176–186. doi: 10.16798/j.issn.1003-0530.2019.02.003QIN Fei, LIANG Xingdong, ZHANG Fubo, et al. Building target extraction methods in array SAR tomography based on machine learning[J]. Journal of Signal Processing, 2019, 35(2): 176–186. doi: 10.16798/j.issn.1003-0530.2019.02.003 [21] 解金卫, 李真芳, 王帆, 等. 基于幅相不一致准则的建筑物SAR层析成像[J]. 雷达学报, 2020, 9(1): 154–165. doi: 10.12000/JR19062XIE Jinwei, LI Zhenfang, WANG Fan, et al. SAR tomography imaging for buildings using an inconsistency criterion for amplitude and phase[J]. Journal of Radars, 2020, 9(1): 154–165. doi: 10.12000/JR19062 [22] FORNARO G, SERAFINO F, and SOLDOVIERI F. Three-dimensional focusing with multipass SAR data[J]. IEEE Transactions on Geoscience and Remote Sensing, 2003, 41(3): 507–517. doi: 10.1109/TGRS.2003.809934 [23] COLE-RHODES A A, JOHNSON K L, LEMOIGNE J, et al. Multiresolution registration of remote sensing imagery by optimization of mutual information using a stochastic gradient[J]. IEEE Transactions on Image Processing, 2003, 12(12): 1495–1511. doi: 10.1109/TIP.2003.819237 [24] LE MOIGNE J, NETANYAHU N S, and EASTMAN R D. Image Registration for Remote Sensing[M]. Cambridge: Cambridge University Press, 2011: 215–239. [25] CHUREESAMPANT K and SUSAKI J. Automatic GCP extraction of fully polarimetric SAR images[J]. IEEE Transactions on Geoscience and Remote Sensing, 2014, 52(1): 137–148. doi: 10.1109/TGRS.2012.2236890 [26] LI Hui, MANJUNATH B S, and MITRA S K. A contour-based approach to multisensor image registration[J]. IEEE Transactions on Image Processing, 1995, 4(3): 320–334. doi: 10.1109/83.366480 [27] HUANG Lei and LI Zhen. Feature-based image registration using the shape context[J]. International Journal of Remote Sensing, 2010, 31(8): 2169–2177. doi: 10.1080/01431161003621585 [28] SUO Zhiyong, LI Zhenfang, and BAO Zheng. A new strategy to estimate local fringe frequencies for InSAR phase noise reduction[J]. IEEE Geoscience and Remote Sensing Letters, 2010, 7(4): 771–775. doi: 10.1109/LGRS.2010.2047935 [29] OSMANOĞLU B, SUNAR F, WDOWINSKI S, et al. Time series analysis of InSAR data: Methods and trends[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2016, 115: 90–102. doi: 10.1016/j.isprsjprs.2015.10.003 [30] FERRETTI A, PRATI C, and ROCCA F. Permanent scatterers in SAR interferometry[J]. IEEE Transactions on Geoscience and Remote Sensing, 2001, 39(1): 8–20. doi: 10.1109/36.898661 [31] HOOPER A, SEGALL P, and ZEBKER H. Persistent scatterer interferometric synthetic aperture radar for crustal deformation analysis, with application to Volcán Alcedo, Galápagos[J]. Journal of Geophysical Research, 2007, 112(B7): B07407. [32] YANG Bo, XU Huaping, LIU Wei, et al. An improved stanford method for persistent scatterers applied to 3D building reconstruction and monitoring[J]. Remote Sensing, 2019, 11(15): 1807. doi: 10.3390/rs11151807 [33] LANARI R, MORA O, MANUNTA M, et al. A small-baseline approach for investigating deformations on full-resolution differential SAR interferograms[J]. IEEE Transactions on Geoscience and Remote Sensing, 2004, 42(7): 1377–1386. doi: 10.1109/TGRS.2004.828196 [34] ZHAO Changjun, LI Zhen, ZHANG Ping, et al. Improved maximum likelihood estimation for optimal phase history retrieval of distributed scatterers in InSAR stacks[J]. IEEE Access, 2019, 7: 186319–186327. doi: 10.1109/ACCESS.2019.2961154 [35] ZHAO Changjun, LI Zhen, TIAN Bangsen, et al. A ground surface deformation monitoring InSAR method using improved distributed scatterers phase estimation[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2019, 12(11): 4543–4553. doi: 10.1109/JSTARS.2019.2946729 [36] DEGRAAF S R. SAR imaging via modern 2-D spectral estimation methods[J]. IEEE Transactions on Image Processing, 1998, 7(5): 729–761. doi: 10.1109/83.668029 [37] 张福博, 刘梅. 基于频域最小二乘APES的非均匀多基线SAR层析成像算法[J]. 电子与信息学报, 2012, 34(7): 1568–1573. doi: 10.3724/SP.J.1146.2011.01184ZHANG Fubo and LIU Mei. Uneven multi-baseline SAR tomography base on frequency domain least squares Amplitude and Phase Estimation (APES)[J]. Journal of Electronics &Information Technology, 2012, 34(7): 1568–1573. doi: 10.3724/SP.J.1146.2011.01184 [38] 张平, 商建, 杨汝良. 一种有效的二维MUSIC超分辨SAR成像算法[J]. 系统仿真学报, 2010, 22(1): 184–187.ZHANG Ping, SHANG Jian, and YANG Ruliang. Efficient 2D MUSIC superresolution SAR imaging method[J]. Journal of System Simulation, 2010, 22(1): 184–187. [39] ERTIN E, MOSES R L, and POTTER L C. Interferometric methods for three-dimensional target reconstruction with multipass circular SAR[J]. IET Radar, Sonar & Navigation, 2010, 4(3): 464–473. [40] ZHU Xiaoxiang and BAMLER R. Tomographic SAR inversion by L1-Norm regularization——the compressive sensing approach[J]. IEEE Transactions on Geoscience and Remote Sensing, 2010, 48(10): 3839–3846. doi: 10.1109/TGRS.2010.2048117 [41] ÇETIN M, STOJANOVIĆ I, ÖNHON N Ö, et al. Sparsity-driven synthetic aperture radar imaging: Reconstruction, autofocusing, moving targets, and compressed sensing[J]. IEEE Signal Processing Magazine, 2014, 31(4): 27–40. [42] ZHANG Ping, LI Zhen, and CHEN Quan. 2D uesprit superresolution SAR imaging algorithm[C]. 2010 IEEE International Geoscience and Remote Sensing Symposium, Honolulu, USA, 2010: 4067–4070. [43] TEBALDINI S, MINH D H T, D’ALESSANDRO M M, et al. The status of technologies to measure forest biomass and structural properties: State of the art in SAR tomography of tropical forests[J]. Surveys in Geophysics, 2019, 40(4): 779–801. doi: 10.1007/s10712-019-09539-7 [44] EL MOUSSAWI I, MINH D H T, BAGHDADI N, et al. Monitoring tropical forest structure using SAR tomography at L- and P-band[J]. Remote Sensing, 2019, 11(16): 1934. doi: 10.3390/rs11161934 [45] CLOUDE S R. Polarization coherence tomography[J]. Radio Science, 2006, 41(4): RS4017. [46] FREY O, MORSDORF F, and MEIER E. Tomographic imaging of a forested area by airborne multi-baseline p-band SAR[J]. Sensors, 2008, 8(9): 5884–5896. doi: 10.3390/s8095884 [47] TEBALDINI S and ROCCA F. Multibaseline polarimetric SAR tomography of a boreal forest at P-and L-bands[J]. IEEE Transactions on Geoscience and Remote Sensing, 2012, 50(1): 232–246. doi: 10.1109/TGRS.2011.2159614 [48] TEBALDINI S. Single and multipolarimetric SAR tomography of forested areas: A parametric approach[J]. IEEE Transactions on Geoscience and Remote Sensing, 2010, 48(5): 2375–2387. doi: 10.1109/TGRS.2009.2037748 [49] FREY O and MEIER E. 3-D time-domain SAR imaging of a forest using airborne multibaseline data at L- and P-bands[J]. IEEE Transactions on Geoscience and Remote Sensing, 2011, 49(10): 3660–3664. doi: 10.1109/TGRS.2011.2128875 [50] D’ALESSANDRO M M and TEBALDINI S. Phenomenology of p-band scattering from a tropical forest through three-dimensional SAR tomography[J]. IEEE Geoscience and Remote Sensing Letters, 2012, 9(3): 442–446. doi: 10.1109/LGRS.2011.2170658 [51] MINH D H T, TEBALDINI S, ROCCA F, et al. Capabilities of BIOMASS tomography for investigating tropical forests[J]. IEEE Transactions on Geoscience and Remote Sensing, 2015, 53(2): 965–975. doi: 10.1109/TGRS.2014.2331142 [52] MINHD H T, LE TOAN T, ROCCA F, et al. SAR tomography for the retrieval of forest biomass and height: Cross-validation at two tropical forest sites in French Guiana[J]. Remote Sensing of Environment, 2016, 175: 138–147. doi: 10.1016/j.rse.2015.12.037 [53] PARDINI M, TELLO M, CAZCARRA-BES V, et al. L- and P-band 3-D SAR reflectivity profiles versus lidar waveforms: The AfriSAR case[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2018, 11(10): 3386–3401. doi: 10.1109/JSTARS.2018.2847033 [54] EL MOUSSAWI I, MINH D H T, BAGHDADI N, et al. L-band UAVSAR tomographic imaging in dense forests: Gabon forests[J]. Remote Sensing, 2019, 11(5): 475. doi: 10.3390/rs11050475 [55] JOERG H, PARDINI M, HAJNSEK I, et al. Sensitivity of SAR tomography to the phenological cycle of agricultural crops at X-, C-, and L-band[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2018, 11(9): 3014–3029. doi: 10.1109/JSTARS.2018.2845127 [56] JOERG H, PARDINI M, HAJNSEK I, et al. 3-D scattering characterization of agricultural crops at C-band using SAR tomography[J]. IEEE Transactions on Geoscience and Remote Sensing, 2018, 56(7): 3976–3989. doi: 10.1109/TGRS.2018.2818440 [57] WU Xiaoqing, JEZEK K C, RODRIGUEZ E, et al. Ice sheet bed mapping with airborne SAR tomography[J]. IEEE Transactions on Geoscience and Remote Sensing, 2011, 49(10): 3791–3802. doi: 10.1109/TGRS.2011.2132802 [58] PADEN J, AKINS T, DUNSON D, et al. Ice-sheet bed 3-D tomography[J]. Journal of Glaciology, 2010, 56(195): 3–11. doi: 10.3189/002214310791190811 [59] JEZEK K, WU X, PADEN J, et al. Radar mapping of isunnguata sermia, greenland[J]. Journal of Glaciology, 2013, 59(218): 1135–1146. doi: 10.3189/2013JoG12J248 [60] BANDA F, DALL J, and TEBALDINI S. Single and multipolarimetric P-band SAR tomography of subsurface ice structure[J]. IEEE Transactions on Geoscience and Remote Sensing, 2016, 54(5): 2832–2845. doi: 10.1109/TGRS.2015.2506399 [61] TEBALDINI S, NAGLER T, ROTT H, et al. Imaging the internal structure of an alpine glacier via L-band airborne SAR tomography[J]. IEEE Transactions on Geoscience and Remote Sensing, 2016, 54(12): 7197–7209. doi: 10.1109/TGRS.2016.2597361 [62] PONCE O, PRATS P, SCHEIBER R, et al. Polarimetric 3-D imaging with airborne holographic SAR tomography over glaciers[C]. 2015 IEEE International Geoscience and Remote Sensing Symposium, Milan, Italy, 2015: 5280–5283. [63] CHAI Huiming, LV Xiaolei, and XIAO Ping. Deformation monitoring using ground-based differential SAR tomography[J]. IEEE Geoscience and Remote Sensing Letters, 2020, 17(6): 993–997. doi: 10.1109/LGRS.2019.2938233 [64] 李震, 李治显, 田帮森, 等. 基于准晶体近似的多层积雪InSAR散射模型[J]. 中国科学: 地球科学, 2018, 61(8): 1112–1126. doi: 10.1007/s11430-017-9178-3LI Zhen, LI Zhixian, TIAN Bangsen, et al. An InSAR scattering model for multi-layer snow based on Quasi-Crystalline Approximation (QCA) theory[J]. Science China Earth Sciences, 2018, 61(8): 1112–1126. doi: 10.1007/s11430-017-9178-3 [65] TEBALDINI S and FERRO-FAMIL L. High resolution three-dimensional imaging of a snowpack from ground-based sar data acquired at X and Ku band[C]. 2013 IEEE International Geoscience and Remote Sensing Symposium, Melbourne, 2013: 77–80. [66] FREY O, WERNER C L, CADUFF R, et al. Tomographic profiling with snowscat within the ESA snowlab campaign: Time series of snow profiles over three snow seasons[C]. 2018 IEEE International Geoscience and Remote Sensing Symposium, Valencia, Spain, 2018: 6512–6515. [67] XU Xiaolan, BALDI C A, DE BLESER J W, et al. Multi-frequency tomography radar observations of snow stratigraphy at fraser during SnowEx[C]. 2018 IEEE International Geoscience and Remote Sensing Symposium, Valencia, Spain, 2018: 6269–6272. [68] XU Xiaolan, YUEH S, and TSANG L. Theoretical modeling of multi-frequency tomography radar observations of snow stratigraphy[C]. 2019 IEEE International Geoscience and Remote Sensing Symposium, Yokohama, Japan, 2019: 4823–4825. [69] FORNARO G, REALE D, and SERAFINO F. Four-dimensional SAR imaging for height estimation and monitoring of single and double scatterers[J]. IEEE Transactions on Geoscience and Remote Sensing, 2009, 47(1): 224–237. doi: 10.1109/TGRS.2008.2000837 [70] FORNARO G, PAUCIULLO A, REALE D, et al. Multilook SAR tomography for 3-D reconstruction and monitoring of single structures applied to COSMO-SKYMED data[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2014, 7(7): 2776–2785. doi: 10.1109/JSTARS.2014.2316323 [71] FORNARO G, SERAFINO F, and REALE D. 4-D SAR imaging: The case study of rome[J]. IEEE Geoscience and Remote Sensing Letters, 2010, 7(2): 236–240. doi: 10.1109/LGRS.2009.2032133 [72] REALE D, FORNARO G, PAUCIULLO A, et al. Tomographic imaging and monitoring of buildings with very high resolution SAR data[J]. IEEE Geoscience and Remote Sensing Letters, 2011, 8(4): 661–665. doi: 10.1109/LGRS.2010.2098845 [73] SHI Yilei, ZHU Xiaoxiang, and BAMLER R. Nonlocal compressive sensing-based SAR tomography[J]. IEEE Transactions on Geoscience and Remote Sensing, 2019, 57(5): 3015–3024. doi: 10.1109/TGRS.2018.2879382 [74] ZHU Xiaoxiang, WANG Yuanyuan, MONTAZERI S, et al. A review of ten-year advances of multi-baseline SAR interferometry using TerraSAR-X data[J]. Remote Sensing, 2018, 10(9): 1374. doi: 10.3390/rs10091374 [75] SHAHZAD M, MAURER M, FRAUNDORFER F, et al. Buildings detection in VHR SAR images using fully convolution neural networks[J]. IEEE Transactions on Geoscience and Remote Sensing, 2019, 57(2): 1100–1116. doi: 10.1109/TGRS.2018.2864716 [76] MA Peifeng, LIN Hui, LAN Hengxing, et al. Multi-dimensional SAR tomography for monitoring the deformation of newly built concrete buildings[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2015, 106: 118–128. doi: 10.1016/j.isprsjprs.2015.04.012 [77] RAMBOUR C, DENIS L, TUPIN F, et al. Urban surface reconstruction in SAR tomography by graph-cuts[J]. Computer Vision and Image Understanding, 2019, 188: 102791. doi: 10.1016/j.cviu.2019.07.011 [78] RAMBOUR C, BUDILLON A, JOHNSY A C, et al. From interferometric to tomographic SAR: A review of synthetic aperture radar tomography-processing techniques for scatterer unmixing in urban areas[J]. IEEE Geoscience and Remote Sensing Magazine, 2020, 8(2): 6–29. doi: 10.1109/MGRS.2019.2957215 -

 下载:
下载:


图(7)
计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

