
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公2018年 7卷 第6期
 上一期
上一期
2018, 7(6): 633-654.
 摘要
摘要 4515KB
4515KB
摘要:
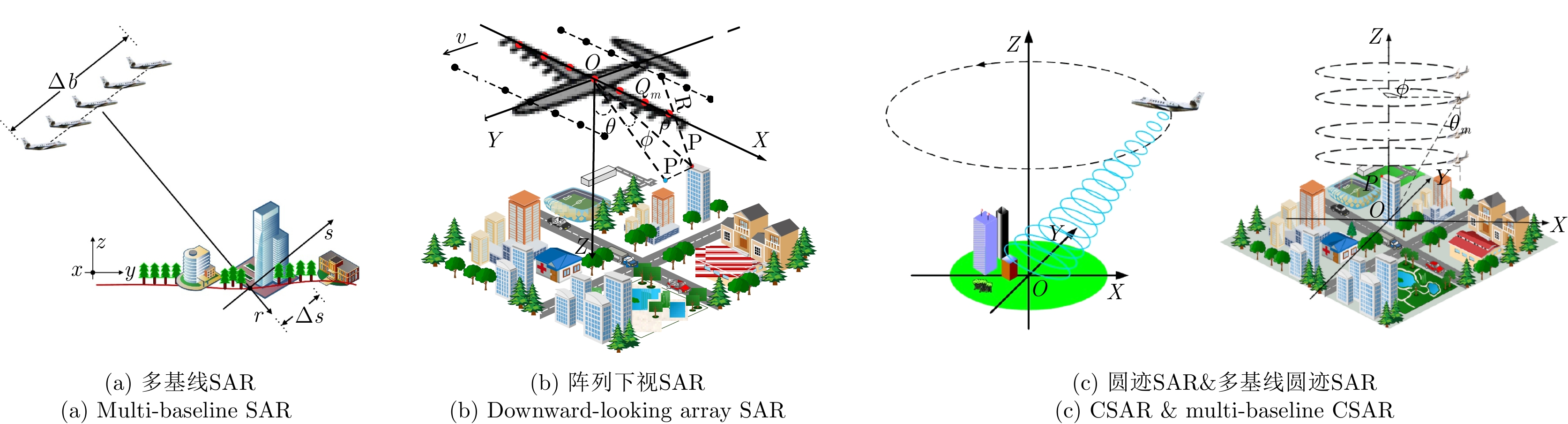
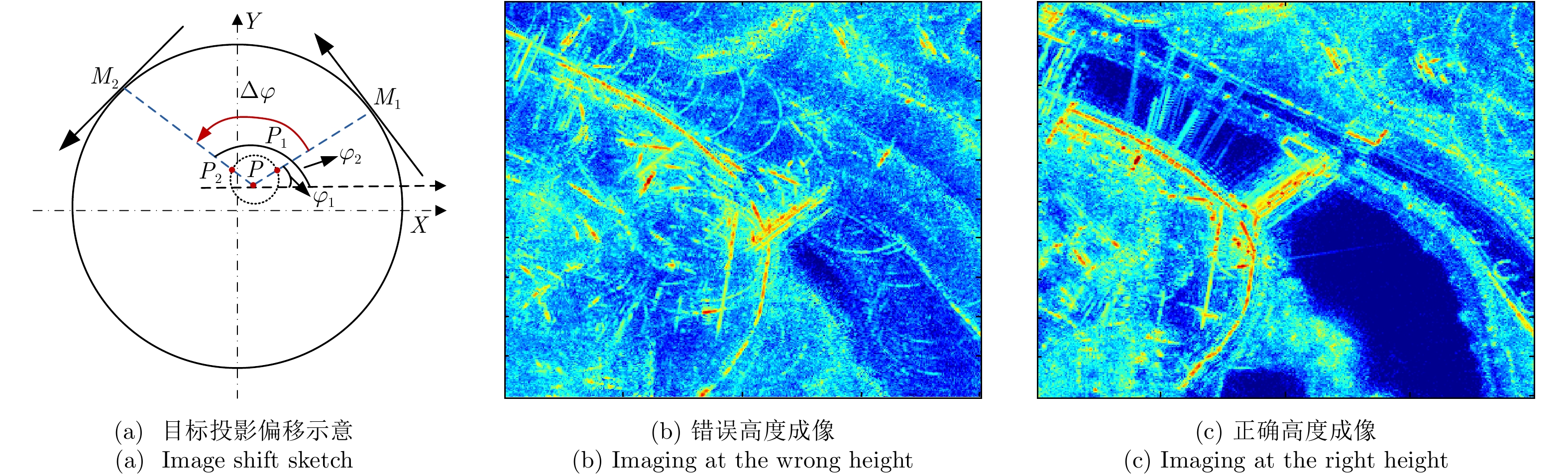
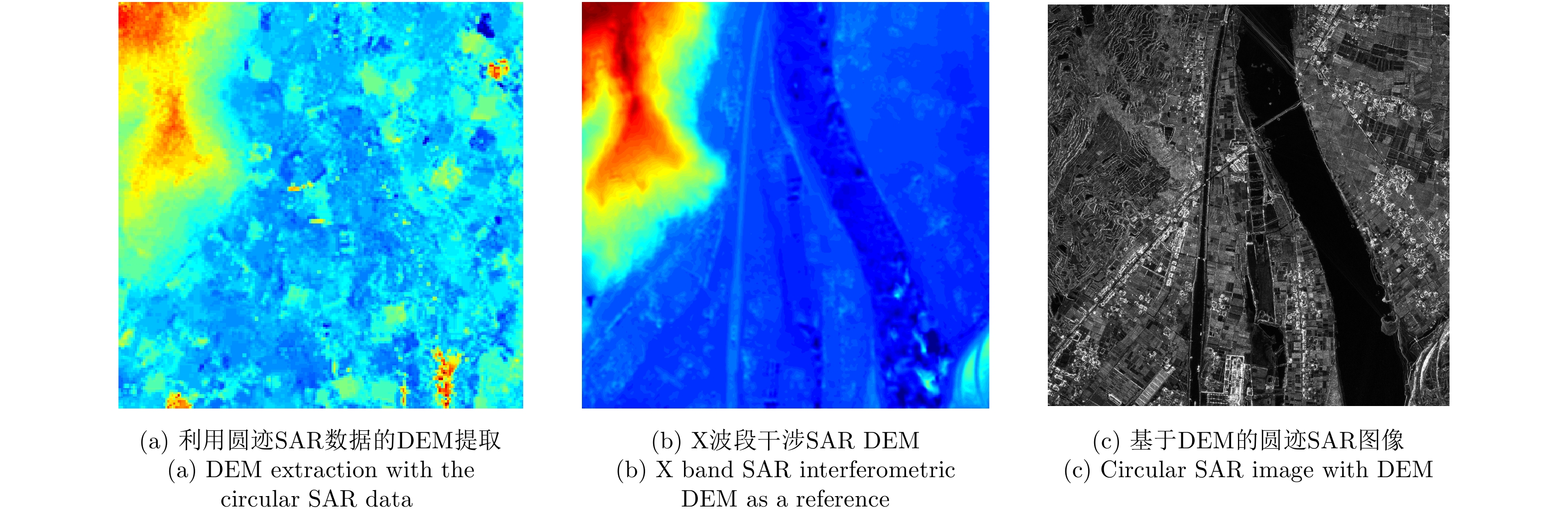
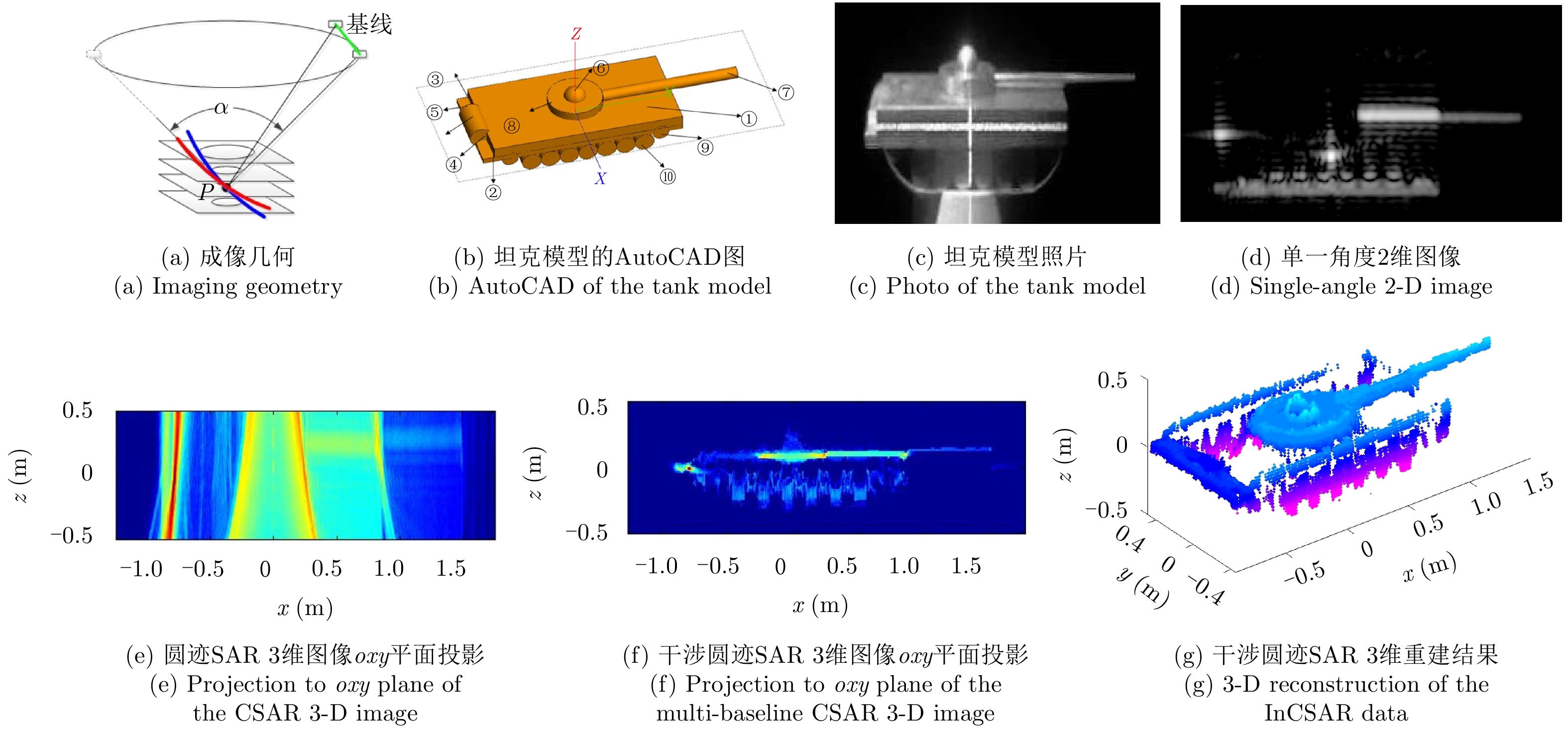
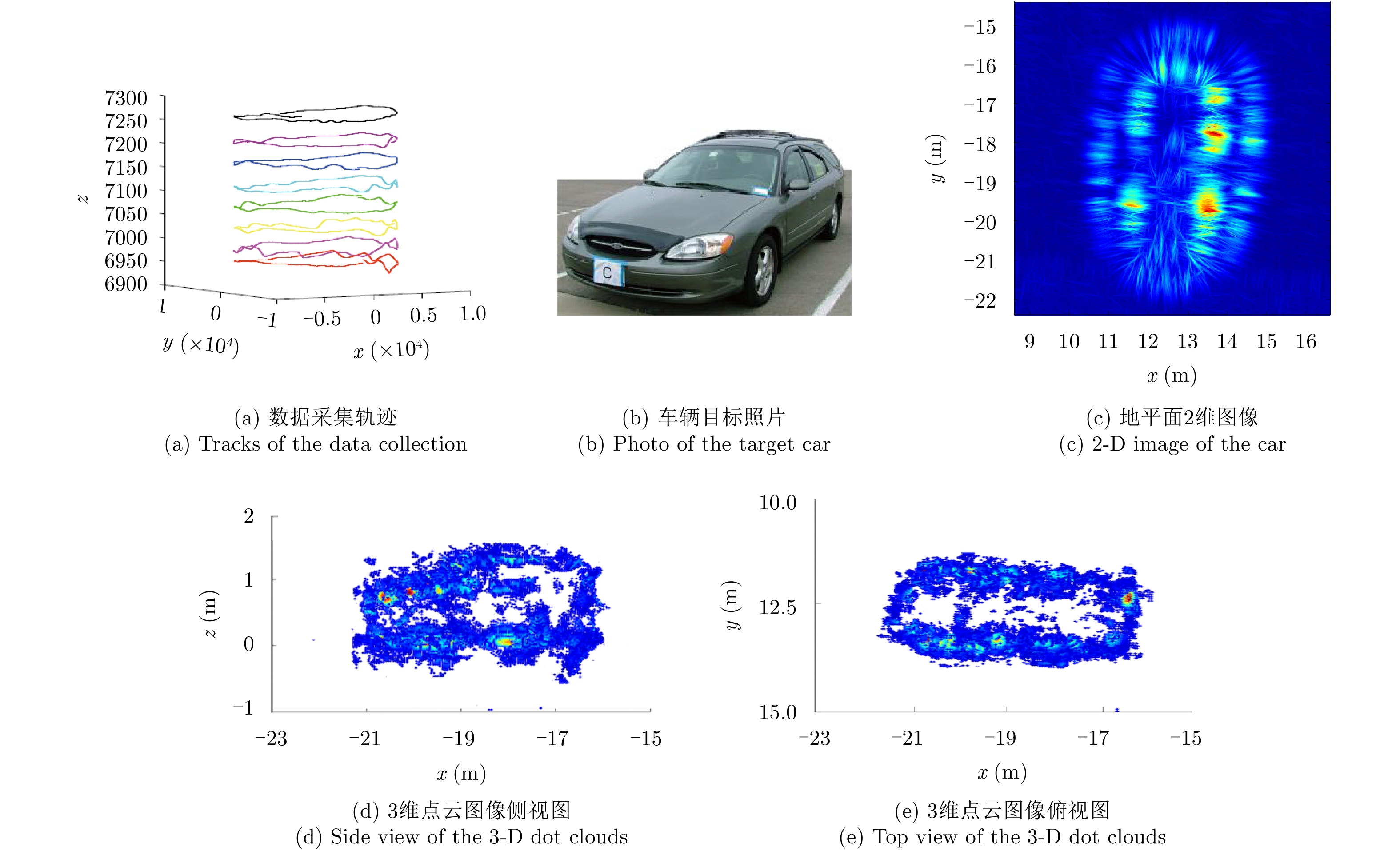
常规SAR成像,平台沿直线飞行,形成直线型合成孔径,仅能获取2维图像,即3维空间中的观测场景在斜距-方位平面的2维投影,图像具有叠掩、透视缩短、阴影等畸变现象。SAR 3维成像突破了斜距-方位2维频率信息获取,能够获取第3维频率信息,实现3维分辨,可获得观测场景的散射中心在3维空间中的分布,从而解决叠掩问题,消除透视缩短、顶底倒置等几何形变现象,更直观地描述客观场景,已成为国际研究热点。该文介绍SAR 3维成像的概念和主要观测模式,分析该领域国内外研究现状和进展,重点阐述作者所在研究团队的SAR 3维成像研究进展,最后对SAR 3维成像技术进行总结和展望。 常规SAR成像,平台沿直线飞行,形成直线型合成孔径,仅能获取2维图像,即3维空间中的观测场景在斜距-方位平面的2维投影,图像具有叠掩、透视缩短、阴影等畸变现象。SAR 3维成像突破了斜距-方位2维频率信息获取,能够获取第3维频率信息,实现3维分辨,可获得观测场景的散射中心在3维空间中的分布,从而解决叠掩问题,消除透视缩短、顶底倒置等几何形变现象,更直观地描述客观场景,已成为国际研究热点。该文介绍SAR 3维成像的概念和主要观测模式,分析该领域国内外研究现状和进展,重点阐述作者所在研究团队的SAR 3维成像研究进展,最后对SAR 3维成像技术进行总结和展望。
常规SAR成像,平台沿直线飞行,形成直线型合成孔径,仅能获取2维图像,即3维空间中的观测场景在斜距-方位平面的2维投影,图像具有叠掩、透视缩短、阴影等畸变现象。SAR 3维成像突破了斜距-方位2维频率信息获取,能够获取第3维频率信息,实现3维分辨,可获得观测场景的散射中心在3维空间中的分布,从而解决叠掩问题,消除透视缩短、顶底倒置等几何形变现象,更直观地描述客观场景,已成为国际研究热点。该文介绍SAR 3维成像的概念和主要观测模式,分析该领域国内外研究现状和进展,重点阐述作者所在研究团队的SAR 3维成像研究进展,最后对SAR 3维成像技术进行总结和展望。 常规SAR成像,平台沿直线飞行,形成直线型合成孔径,仅能获取2维图像,即3维空间中的观测场景在斜距-方位平面的2维投影,图像具有叠掩、透视缩短、阴影等畸变现象。SAR 3维成像突破了斜距-方位2维频率信息获取,能够获取第3维频率信息,实现3维分辨,可获得观测场景的散射中心在3维空间中的分布,从而解决叠掩问题,消除透视缩短、顶底倒置等几何形变现象,更直观地描述客观场景,已成为国际研究热点。该文介绍SAR 3维成像的概念和主要观测模式,分析该领域国内外研究现状和进展,重点阐述作者所在研究团队的SAR 3维成像研究进展,最后对SAR 3维成像技术进行总结和展望。










2018, 7(6): 655-663.
摘要:
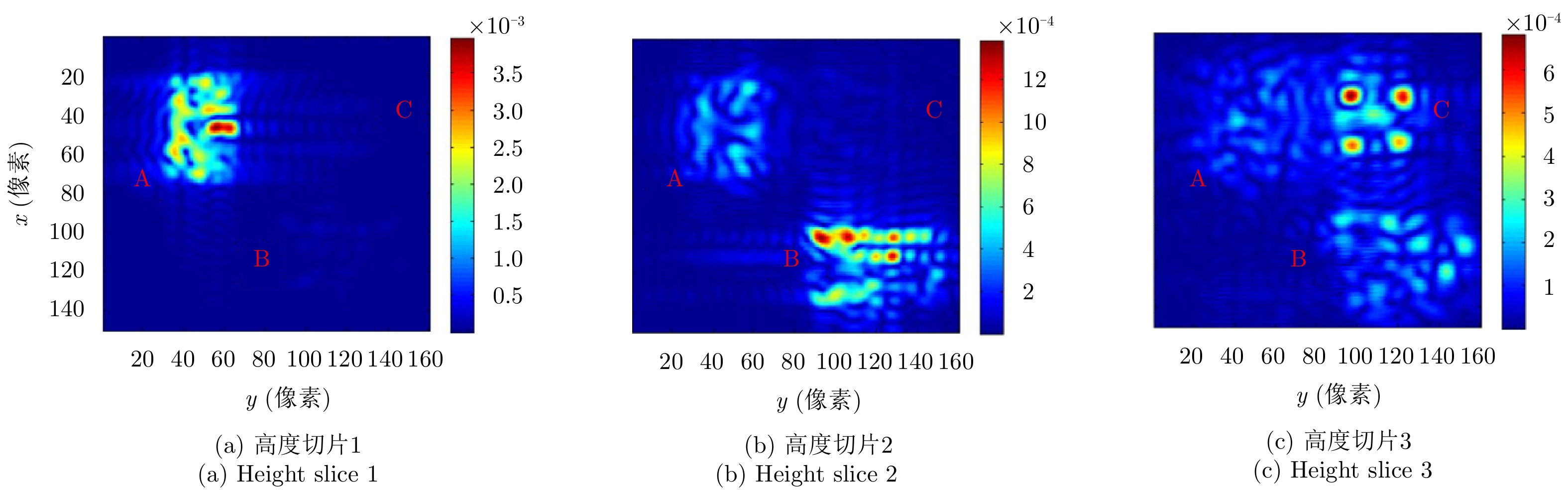
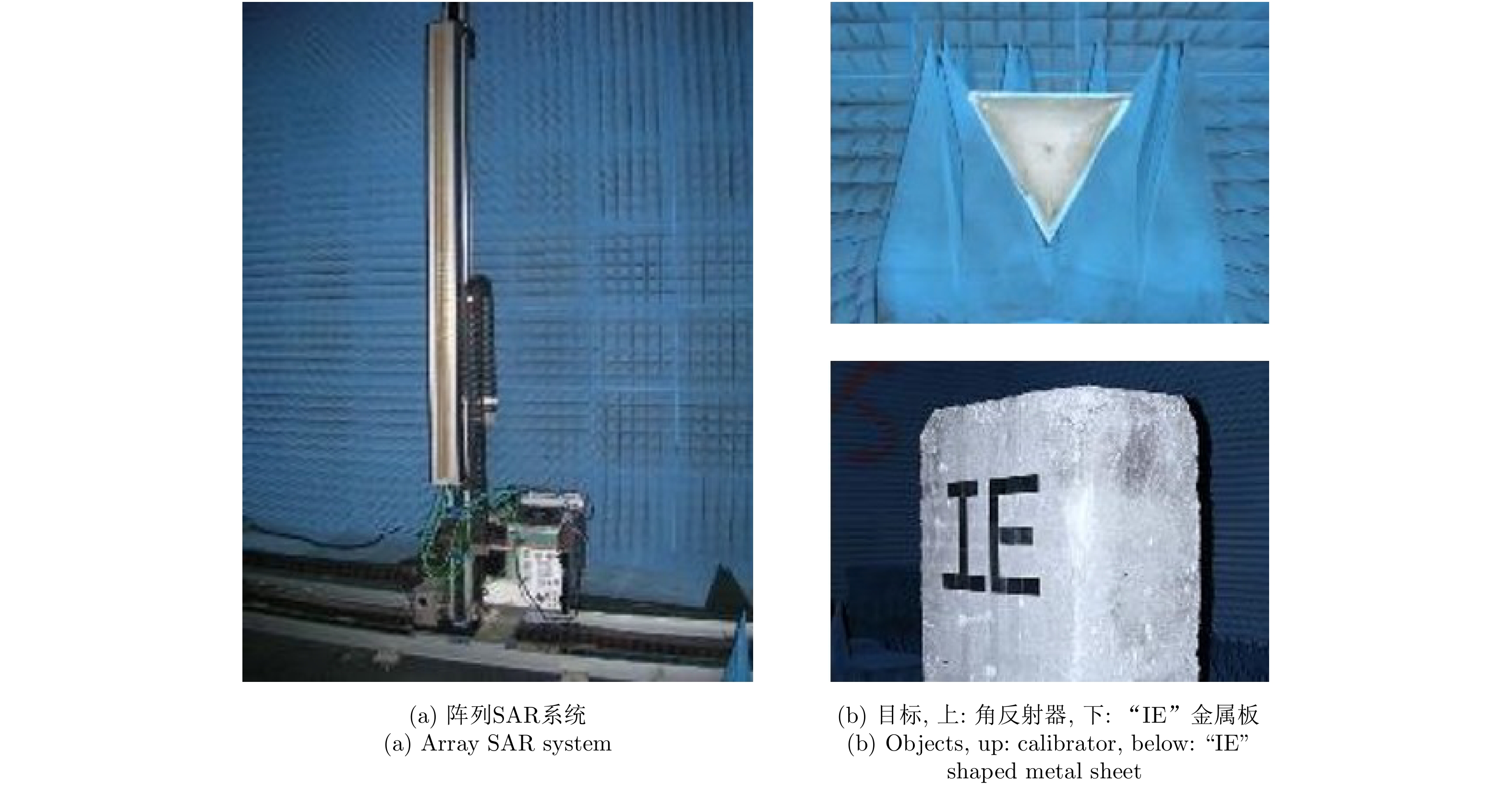
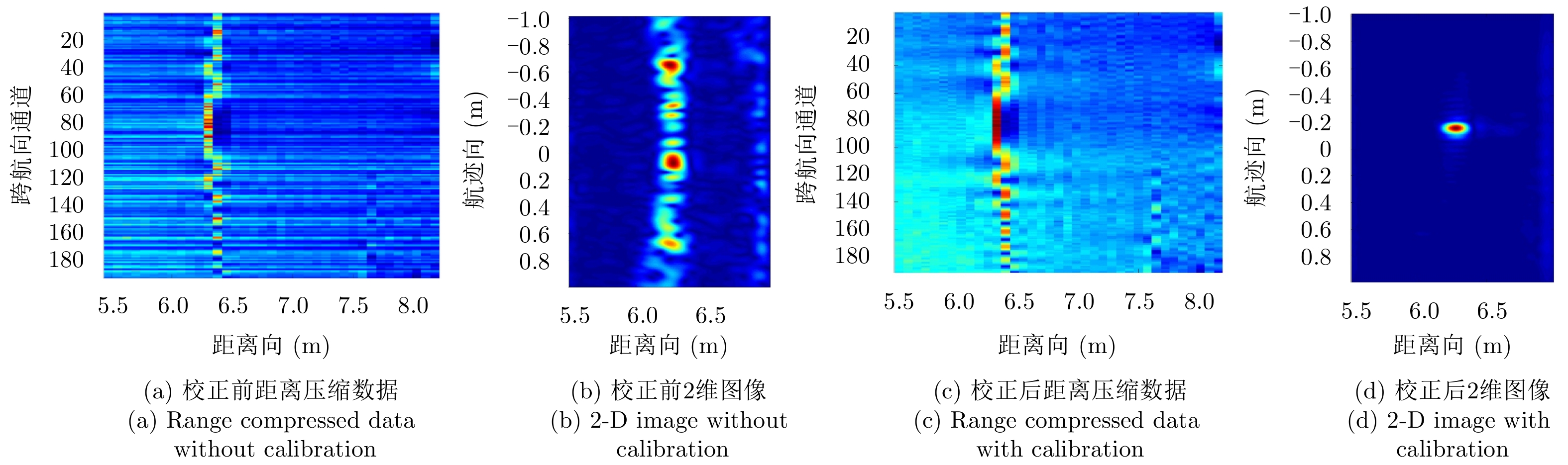
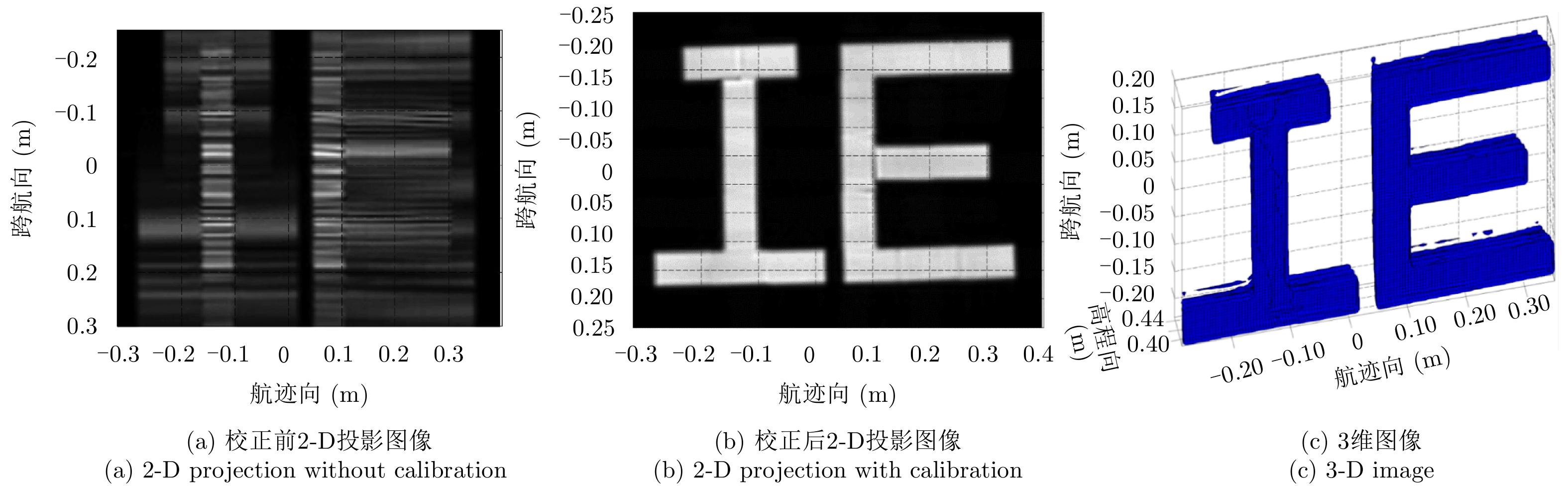
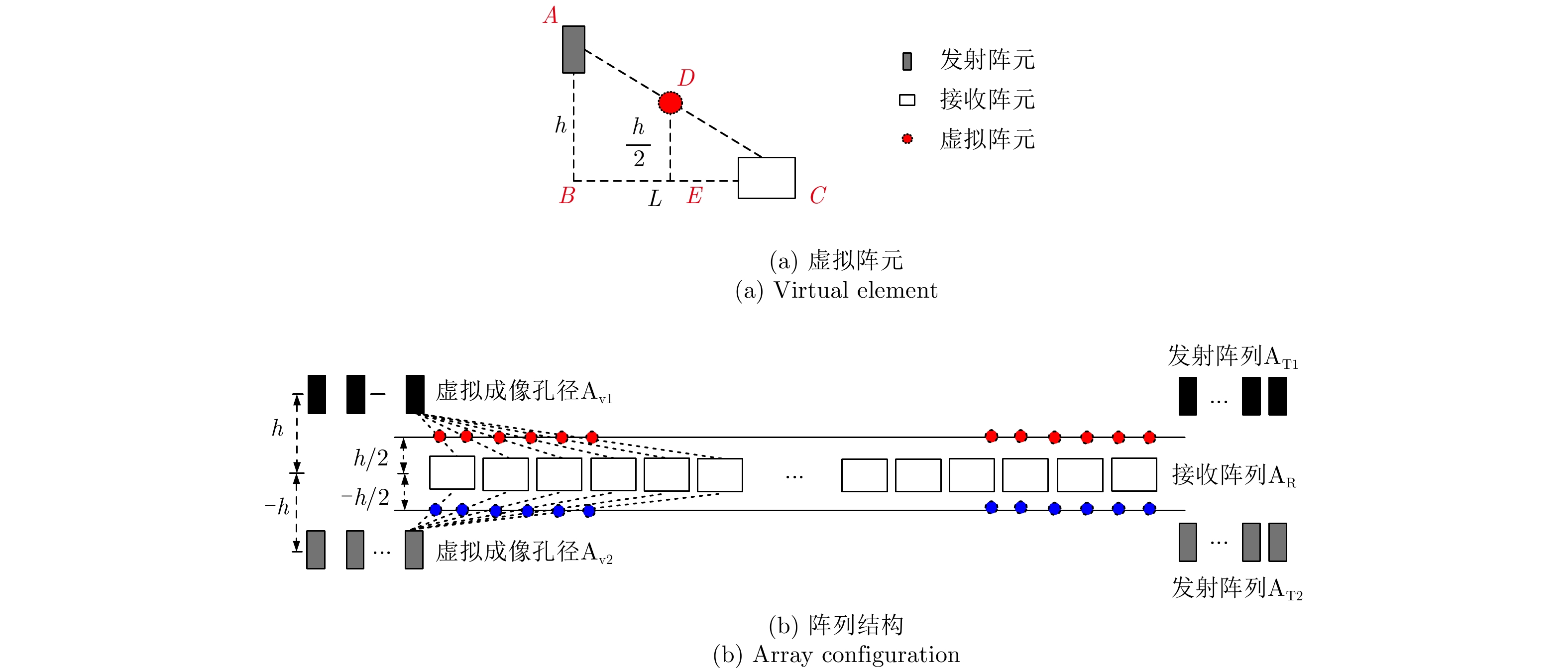
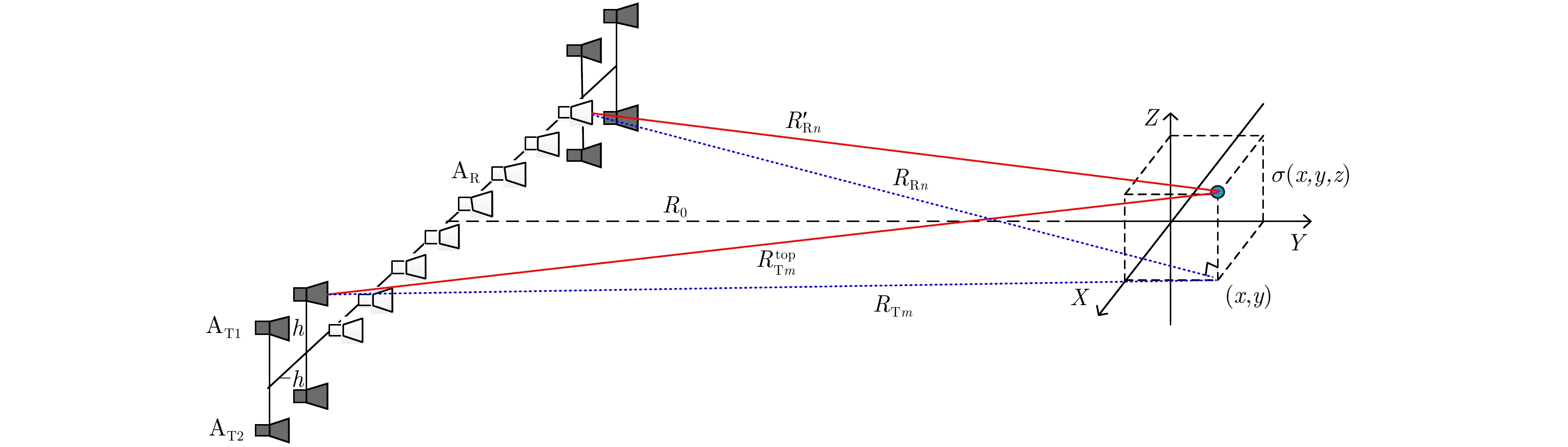
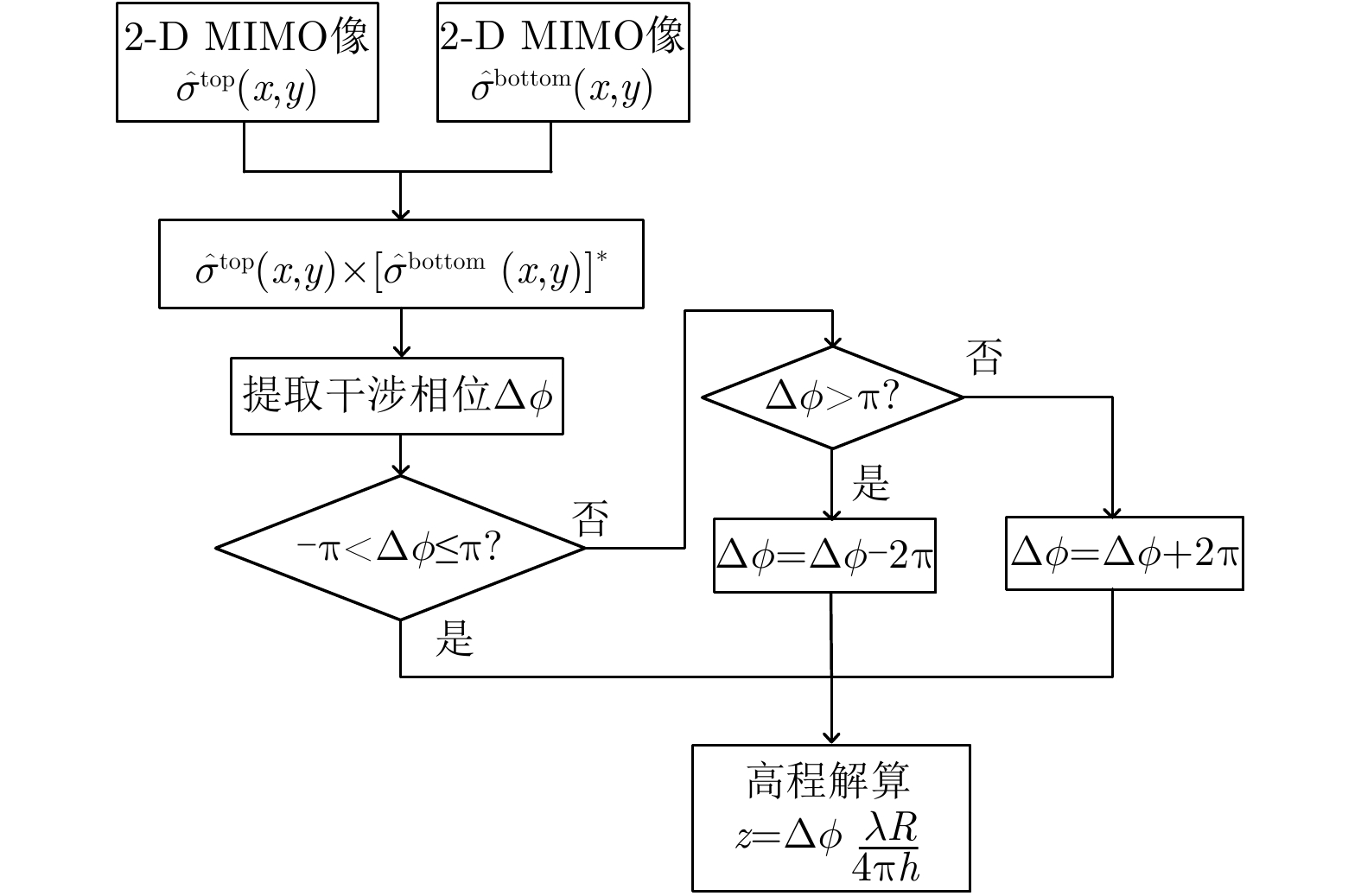
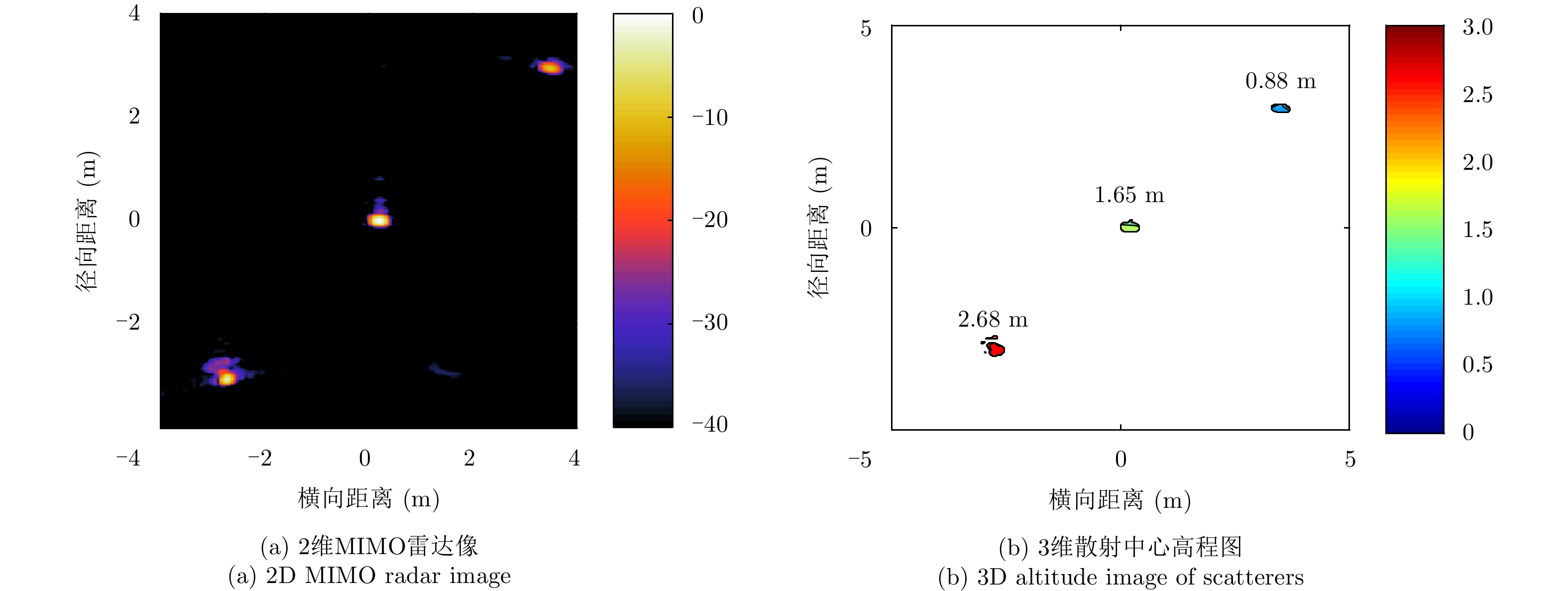
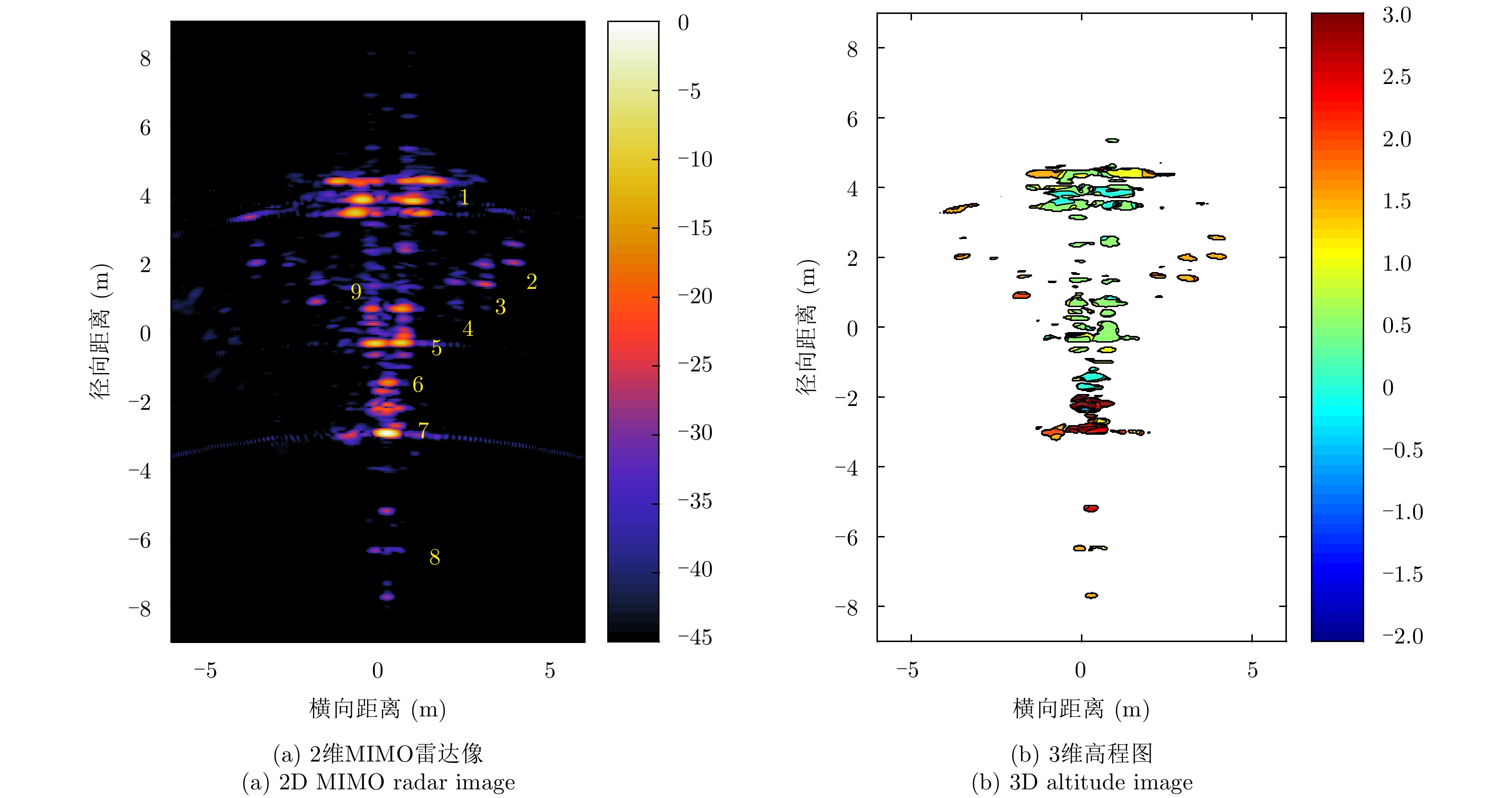
2维合成孔径雷达(Synthetic Aperture Radar, SAR)和逆合成孔径雷达(Inverse Synthetic Aperture Radar, ISAR)成像是目标散射机理高分辨率分析和散射诊断测量的重要手段,现有被广泛采用的技术主要包括转台ISAR和导轨SAR成像技术。相比于传统的2维成像,3维成像可以提供目标局部散射中心在空间的3维位置和散射强度信息。因此,探索新的、可工程化实现与应用的目标3维成像技术是一项极具吸引力的工作。该文提出一种基于多输入多输出(Multiple-Input Multiple-Output, MIMO)阵列技术的3维干涉成像方法。首先,设计并试验了一种具有高孔径利用率和通过虚拟孔径实现干涉成像功能的MIMO阵列;其次,分析了MIMO阵列合成的两组虚拟孔径所成两幅2维雷达像的干涉相位与目标散射中心高度之间的关系,发展了MIMO雷达3维干涉成像算法;最后,通过数值仿真和原理样机实验验证了所提方法在目标散射机理分析和诊断测量应用中的可行性和有效性。 2维合成孔径雷达(Synthetic Aperture Radar, SAR)和逆合成孔径雷达(Inverse Synthetic Aperture Radar, ISAR)成像是目标散射机理高分辨率分析和散射诊断测量的重要手段,现有被广泛采用的技术主要包括转台ISAR和导轨SAR成像技术。相比于传统的2维成像,3维成像可以提供目标局部散射中心在空间的3维位置和散射强度信息。因此,探索新的、可工程化实现与应用的目标3维成像技术是一项极具吸引力的工作。该文提出一种基于多输入多输出(Multiple-Input Multiple-Output, MIMO)阵列技术的3维干涉成像方法。首先,设计并试验了一种具有高孔径利用率和通过虚拟孔径实现干涉成像功能的MIMO阵列;其次,分析了MIMO阵列合成的两组虚拟孔径所成两幅2维雷达像的干涉相位与目标散射中心高度之间的关系,发展了MIMO雷达3维干涉成像算法;最后,通过数值仿真和原理样机实验验证了所提方法在目标散射机理分析和诊断测量应用中的可行性和有效性。
2维合成孔径雷达(Synthetic Aperture Radar, SAR)和逆合成孔径雷达(Inverse Synthetic Aperture Radar, ISAR)成像是目标散射机理高分辨率分析和散射诊断测量的重要手段,现有被广泛采用的技术主要包括转台ISAR和导轨SAR成像技术。相比于传统的2维成像,3维成像可以提供目标局部散射中心在空间的3维位置和散射强度信息。因此,探索新的、可工程化实现与应用的目标3维成像技术是一项极具吸引力的工作。该文提出一种基于多输入多输出(Multiple-Input Multiple-Output, MIMO)阵列技术的3维干涉成像方法。首先,设计并试验了一种具有高孔径利用率和通过虚拟孔径实现干涉成像功能的MIMO阵列;其次,分析了MIMO阵列合成的两组虚拟孔径所成两幅2维雷达像的干涉相位与目标散射中心高度之间的关系,发展了MIMO雷达3维干涉成像算法;最后,通过数值仿真和原理样机实验验证了所提方法在目标散射机理分析和诊断测量应用中的可行性和有效性。 2维合成孔径雷达(Synthetic Aperture Radar, SAR)和逆合成孔径雷达(Inverse Synthetic Aperture Radar, ISAR)成像是目标散射机理高分辨率分析和散射诊断测量的重要手段,现有被广泛采用的技术主要包括转台ISAR和导轨SAR成像技术。相比于传统的2维成像,3维成像可以提供目标局部散射中心在空间的3维位置和散射强度信息。因此,探索新的、可工程化实现与应用的目标3维成像技术是一项极具吸引力的工作。该文提出一种基于多输入多输出(Multiple-Input Multiple-Output, MIMO)阵列技术的3维干涉成像方法。首先,设计并试验了一种具有高孔径利用率和通过虚拟孔径实现干涉成像功能的MIMO阵列;其次,分析了MIMO阵列合成的两组虚拟孔径所成两幅2维雷达像的干涉相位与目标散射中心高度之间的关系,发展了MIMO雷达3维干涉成像算法;最后,通过数值仿真和原理样机实验验证了所提方法在目标散射机理分析和诊断测量应用中的可行性和有效性。



2018, 7(6): 664-675.
摘要:
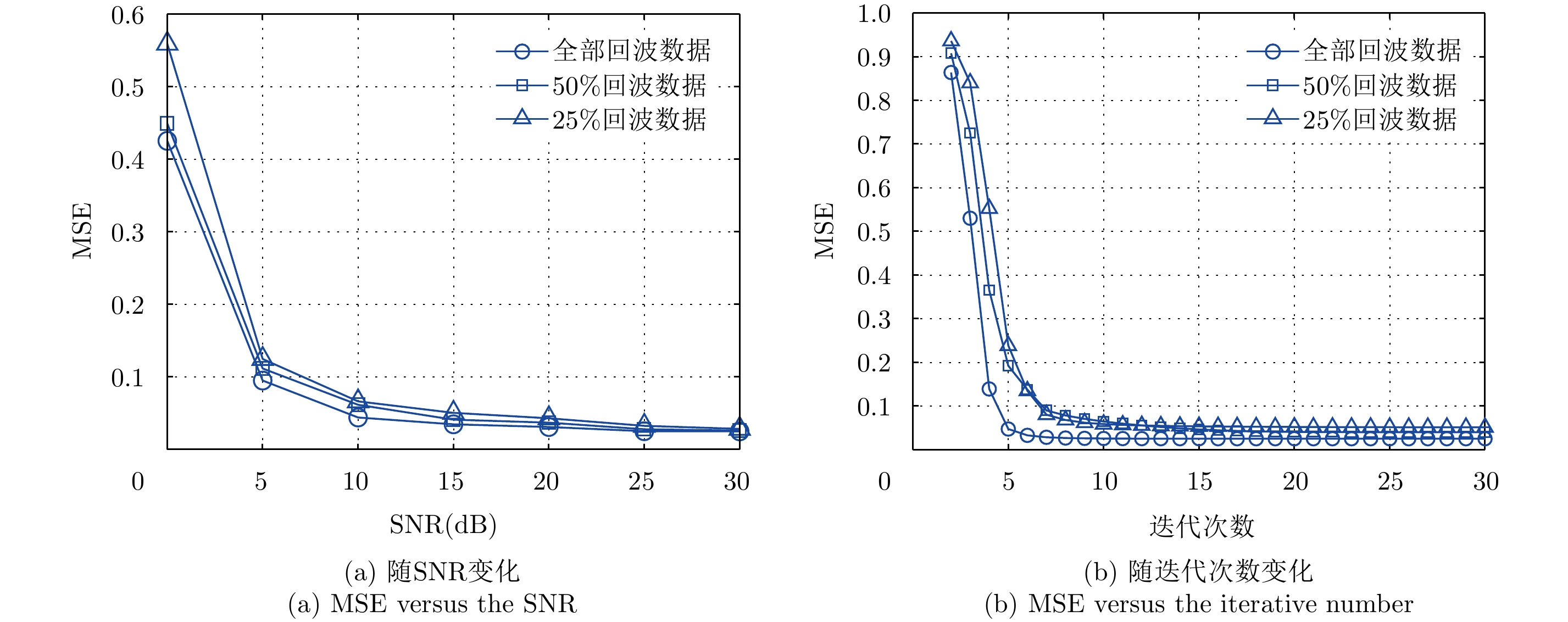
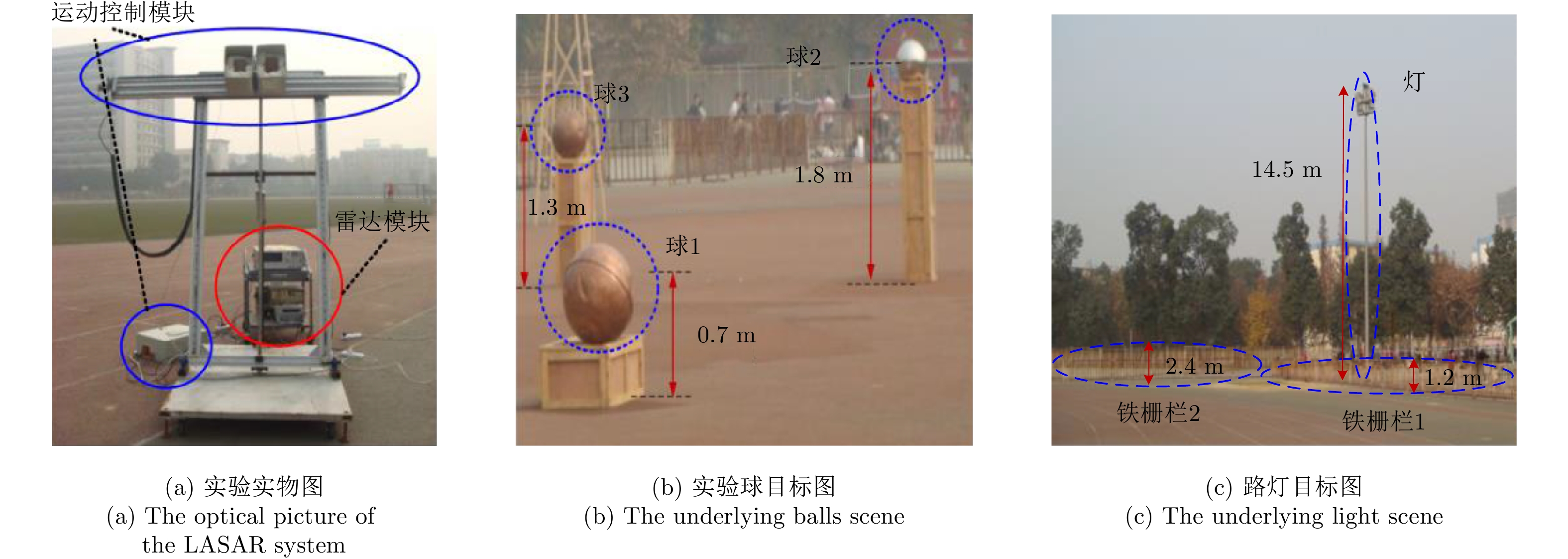
线阵合成孔径雷达(Linear Array Synthetic Aperture Radar, LASAR)3维成像技术是一种具有重要潜在应用价值的新体制成像雷达,压缩感知稀疏重构是近几年实现LASAR高分辨3维成像的热点研究之一。但相对于传统2维SAR,受线阵稀疏分布及阵列-平台2维联动,压缩感知LASAR成像面临回波数据欠采样、多维度高阶相位误差等问题,传统SAR自聚焦算法难以适用于压缩感知LASAR 3维稀疏自聚焦成像。为克服欠采样条件下多维度高阶相位误差对LASAR成像的影响,该文提出了一种基于半正定规划的压缩感知LASAR自聚焦成像算法。首先,结合压缩感知成像理论、图像最大锐度及最小均方误差准则,构造欠采样条件下稀疏目标的相位误差估计模型;其次,利用松弛半正定规划方法估计相位误差;最后,利用迭代逼近方法提高相位误差估计精度,实现压缩感知LASAR高精度稀疏自聚焦成像。另外,通过主散射目标区域提取,仅采用主散射区域进行相位误差估计,进一步提高自聚焦算法运算效率。仿真数据和实测数据验证了该文算法的有效性。 线阵合成孔径雷达(Linear Array Synthetic Aperture Radar, LASAR)3维成像技术是一种具有重要潜在应用价值的新体制成像雷达,压缩感知稀疏重构是近几年实现LASAR高分辨3维成像的热点研究之一。但相对于传统2维SAR,受线阵稀疏分布及阵列-平台2维联动,压缩感知LASAR成像面临回波数据欠采样、多维度高阶相位误差等问题,传统SAR自聚焦算法难以适用于压缩感知LASAR 3维稀疏自聚焦成像。为克服欠采样条件下多维度高阶相位误差对LASAR成像的影响,该文提出了一种基于半正定规划的压缩感知LASAR自聚焦成像算法。首先,结合压缩感知成像理论、图像最大锐度及最小均方误差准则,构造欠采样条件下稀疏目标的相位误差估计模型;其次,利用松弛半正定规划方法估计相位误差;最后,利用迭代逼近方法提高相位误差估计精度,实现压缩感知LASAR高精度稀疏自聚焦成像。另外,通过主散射目标区域提取,仅采用主散射区域进行相位误差估计,进一步提高自聚焦算法运算效率。仿真数据和实测数据验证了该文算法的有效性。
线阵合成孔径雷达(Linear Array Synthetic Aperture Radar, LASAR)3维成像技术是一种具有重要潜在应用价值的新体制成像雷达,压缩感知稀疏重构是近几年实现LASAR高分辨3维成像的热点研究之一。但相对于传统2维SAR,受线阵稀疏分布及阵列-平台2维联动,压缩感知LASAR成像面临回波数据欠采样、多维度高阶相位误差等问题,传统SAR自聚焦算法难以适用于压缩感知LASAR 3维稀疏自聚焦成像。为克服欠采样条件下多维度高阶相位误差对LASAR成像的影响,该文提出了一种基于半正定规划的压缩感知LASAR自聚焦成像算法。首先,结合压缩感知成像理论、图像最大锐度及最小均方误差准则,构造欠采样条件下稀疏目标的相位误差估计模型;其次,利用松弛半正定规划方法估计相位误差;最后,利用迭代逼近方法提高相位误差估计精度,实现压缩感知LASAR高精度稀疏自聚焦成像。另外,通过主散射目标区域提取,仅采用主散射区域进行相位误差估计,进一步提高自聚焦算法运算效率。仿真数据和实测数据验证了该文算法的有效性。 线阵合成孔径雷达(Linear Array Synthetic Aperture Radar, LASAR)3维成像技术是一种具有重要潜在应用价值的新体制成像雷达,压缩感知稀疏重构是近几年实现LASAR高分辨3维成像的热点研究之一。但相对于传统2维SAR,受线阵稀疏分布及阵列-平台2维联动,压缩感知LASAR成像面临回波数据欠采样、多维度高阶相位误差等问题,传统SAR自聚焦算法难以适用于压缩感知LASAR 3维稀疏自聚焦成像。为克服欠采样条件下多维度高阶相位误差对LASAR成像的影响,该文提出了一种基于半正定规划的压缩感知LASAR自聚焦成像算法。首先,结合压缩感知成像理论、图像最大锐度及最小均方误差准则,构造欠采样条件下稀疏目标的相位误差估计模型;其次,利用松弛半正定规划方法估计相位误差;最后,利用迭代逼近方法提高相位误差估计精度,实现压缩感知LASAR高精度稀疏自聚焦成像。另外,通过主散射目标区域提取,仅采用主散射区域进行相位误差估计,进一步提高自聚焦算法运算效率。仿真数据和实测数据验证了该文算法的有效性。



2018, 7(6): 676-684.
摘要:
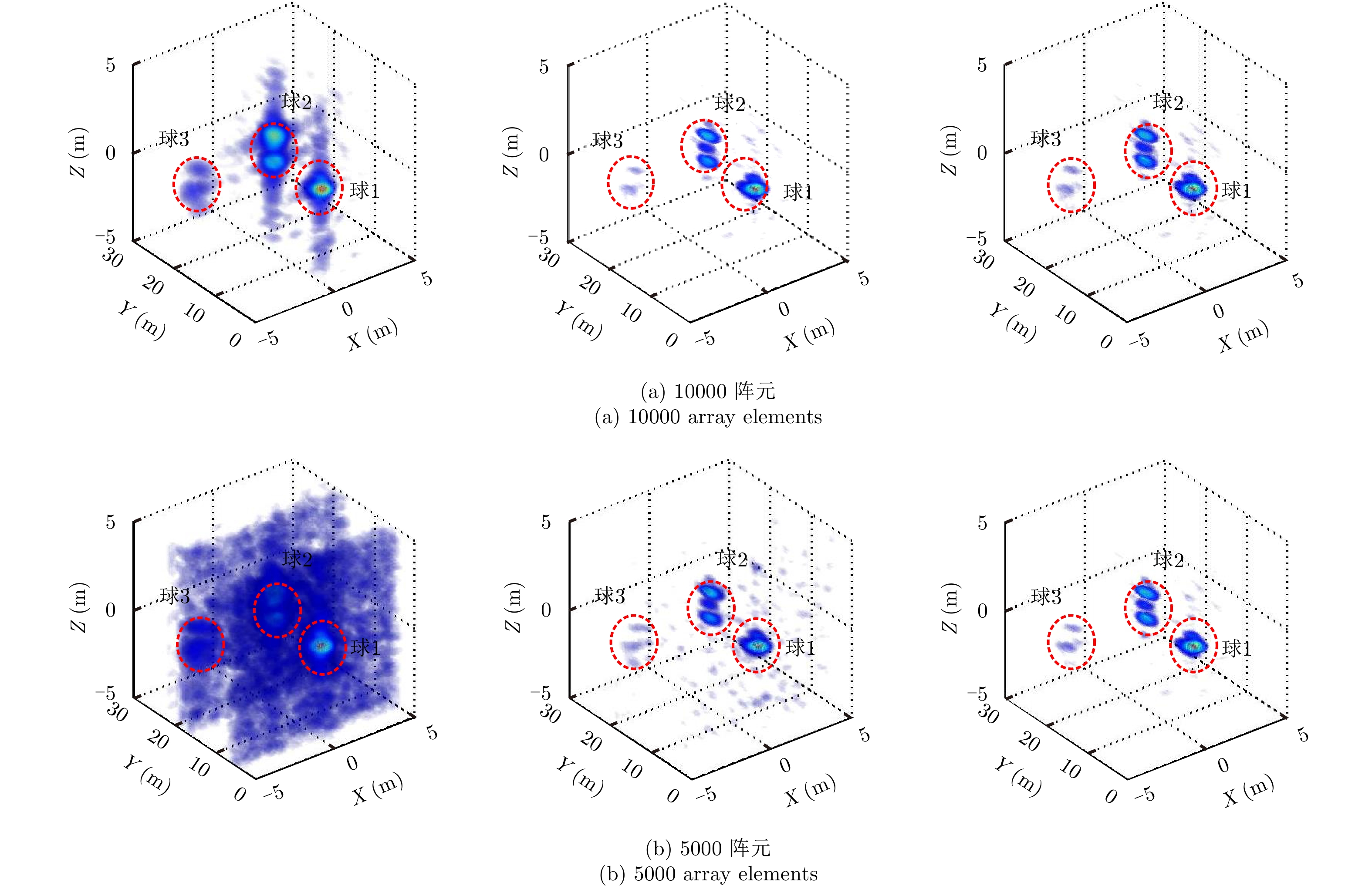
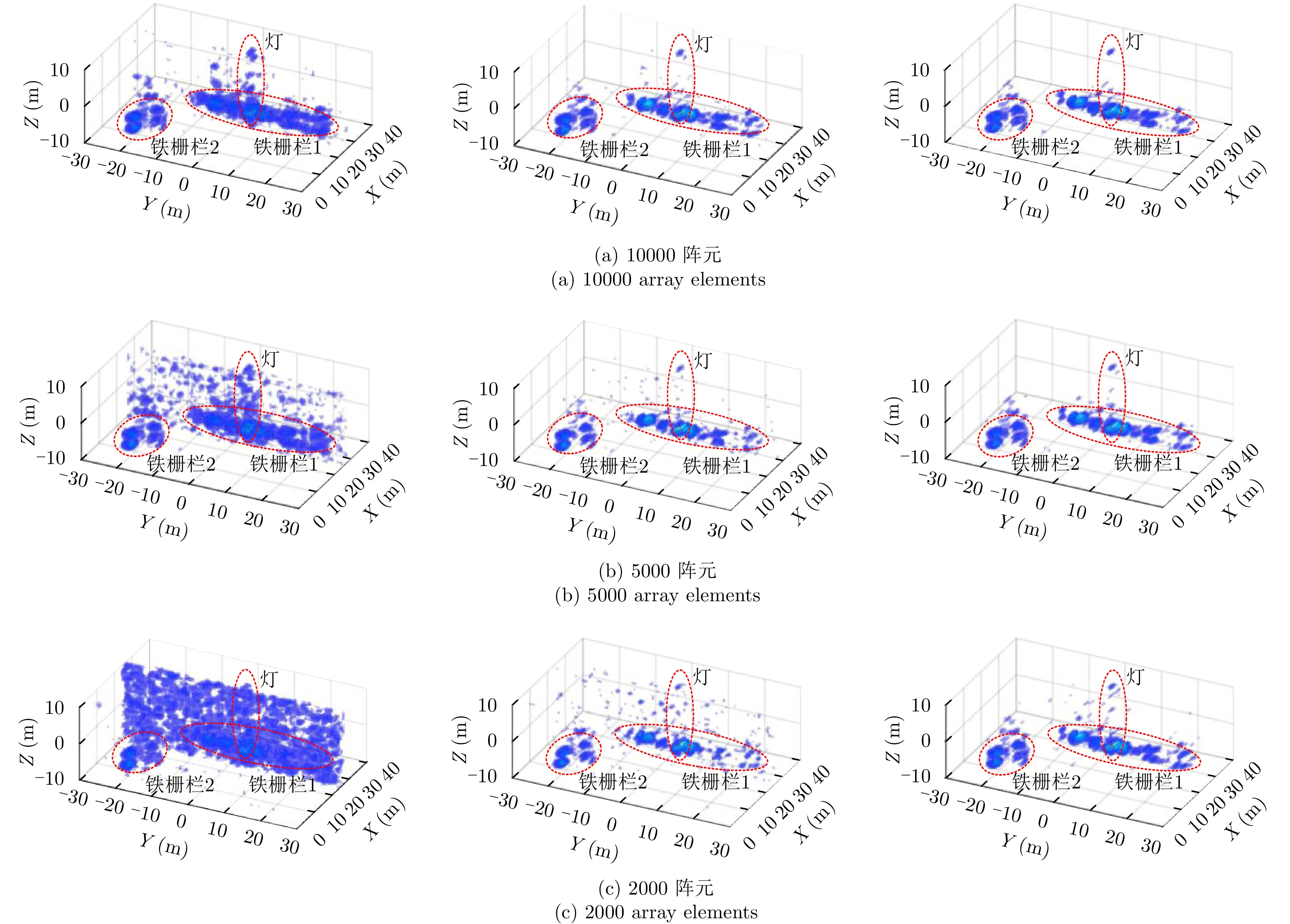
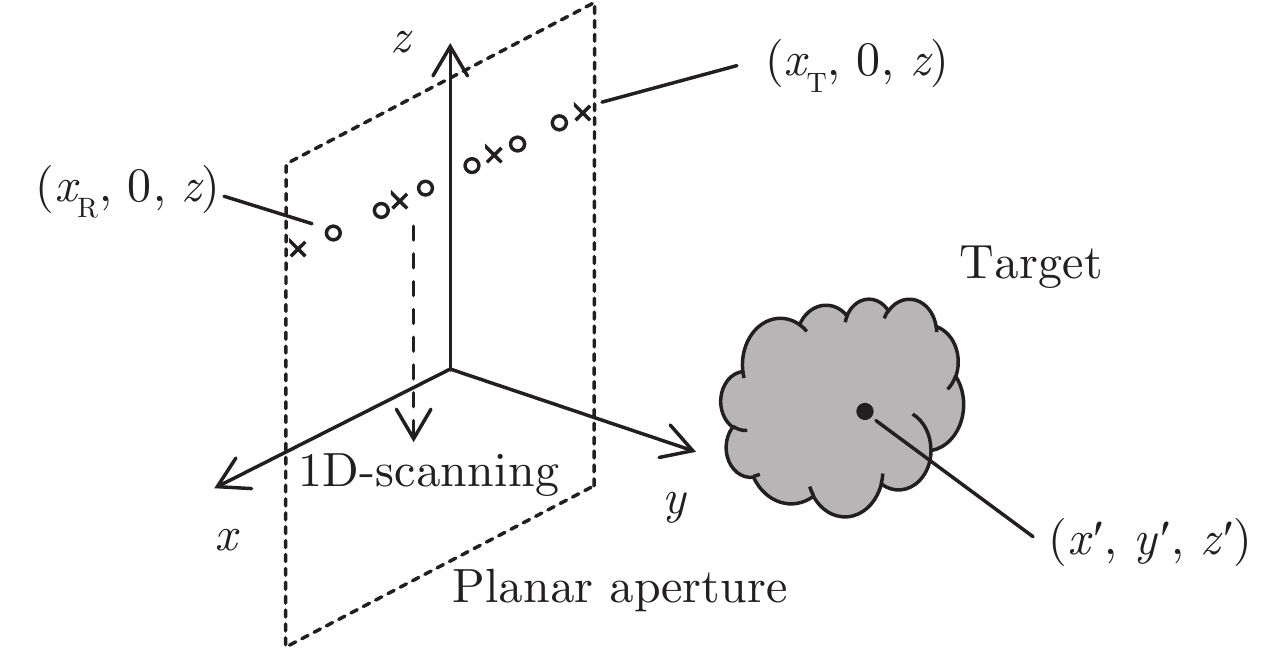
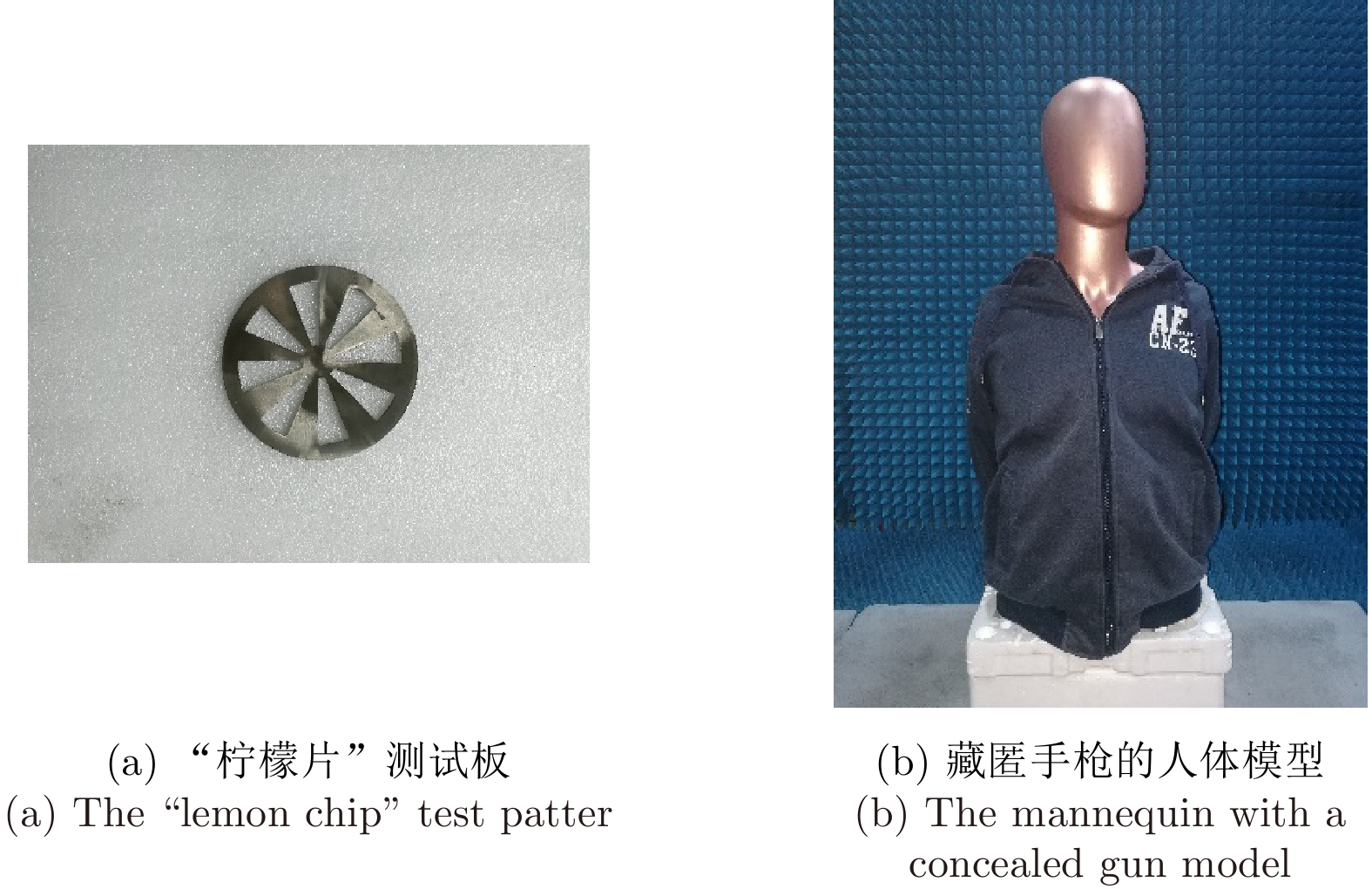
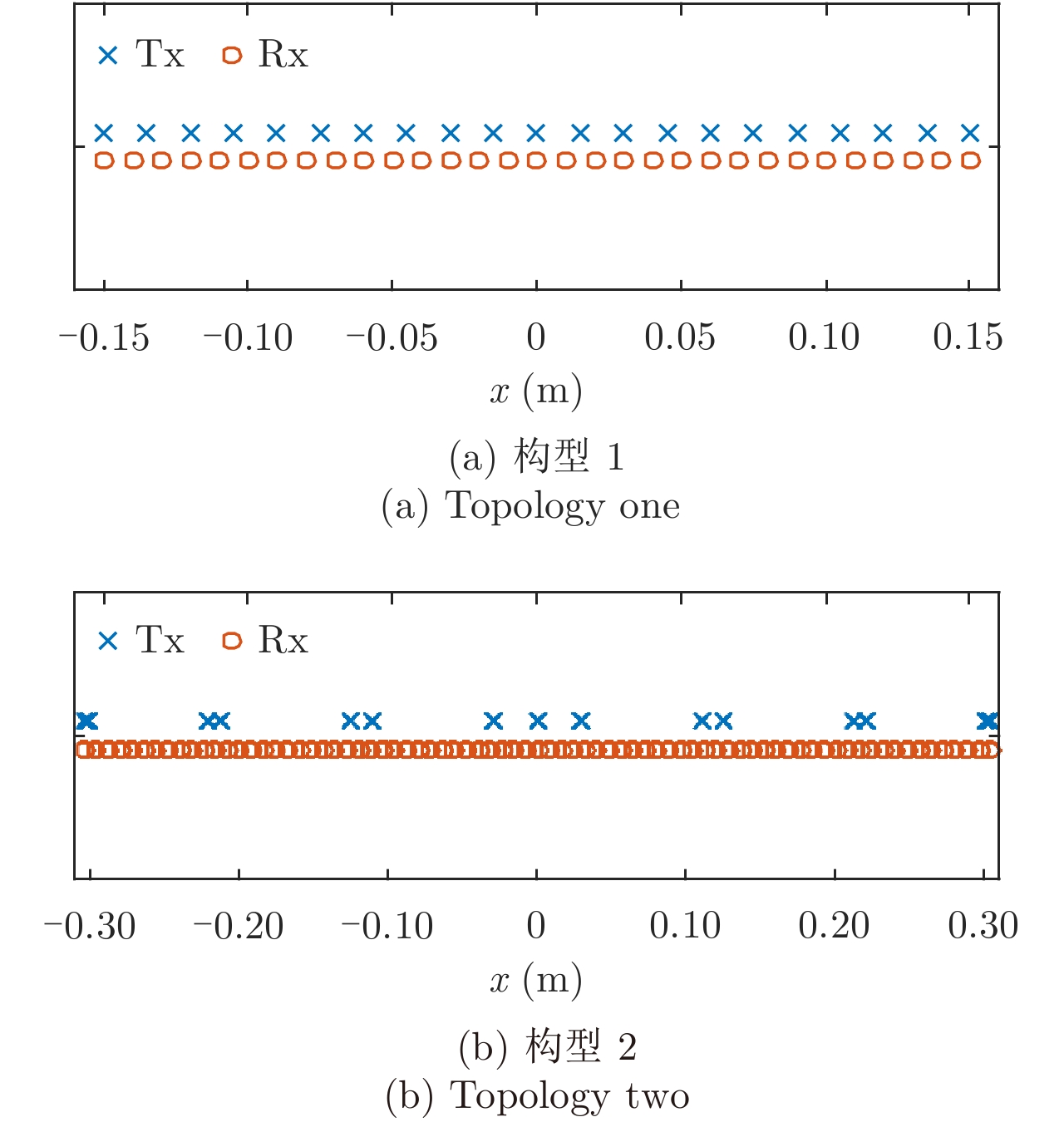
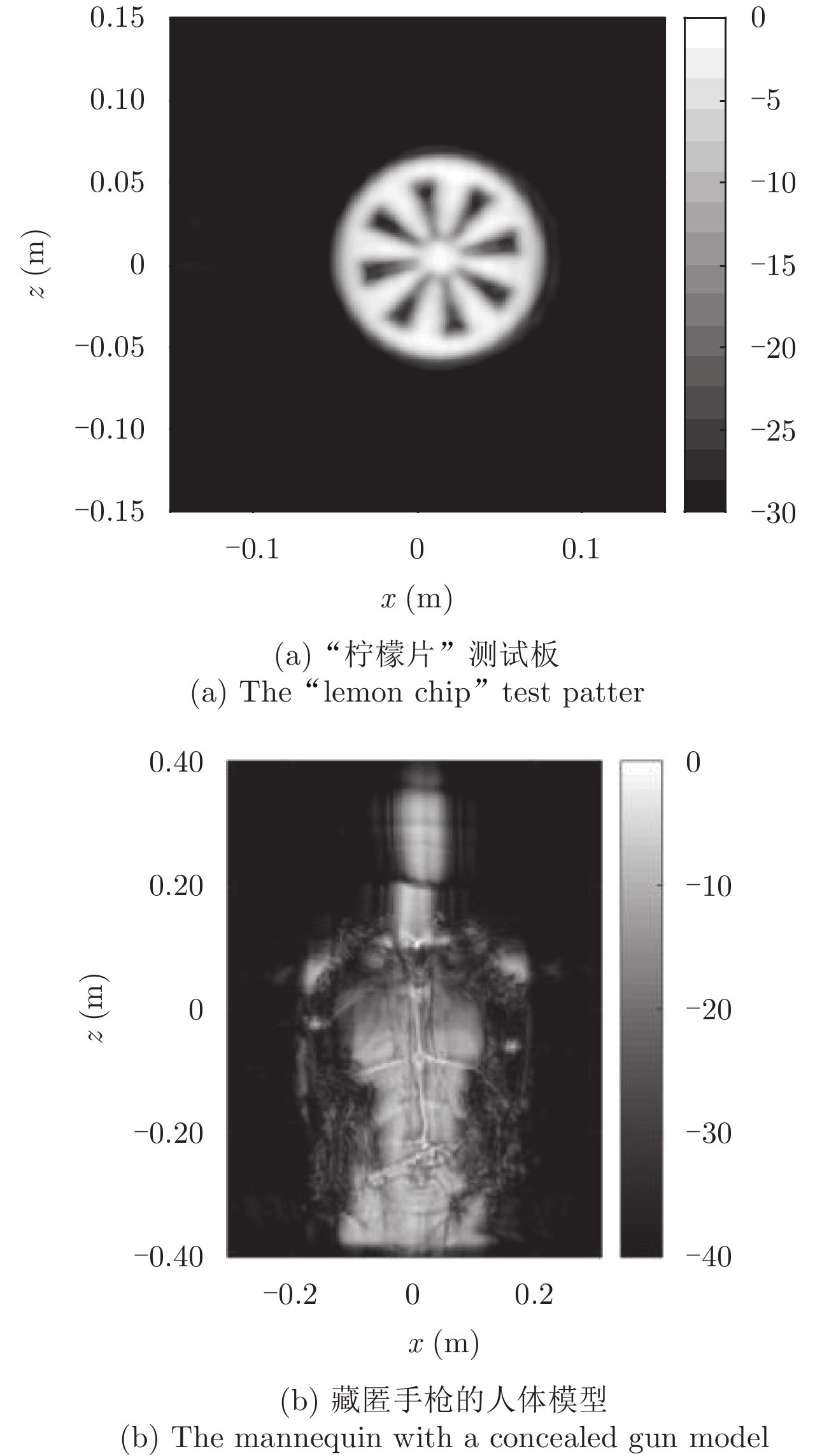
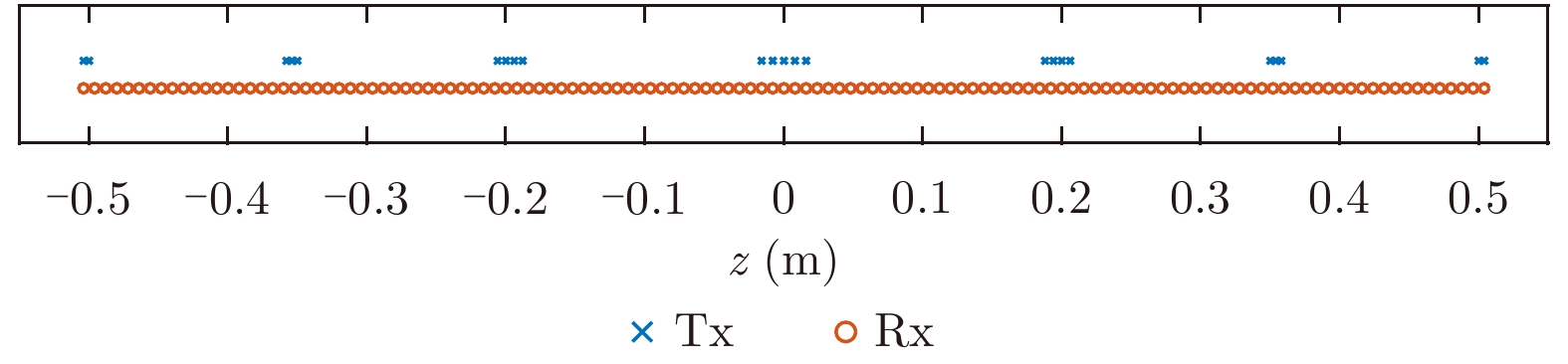
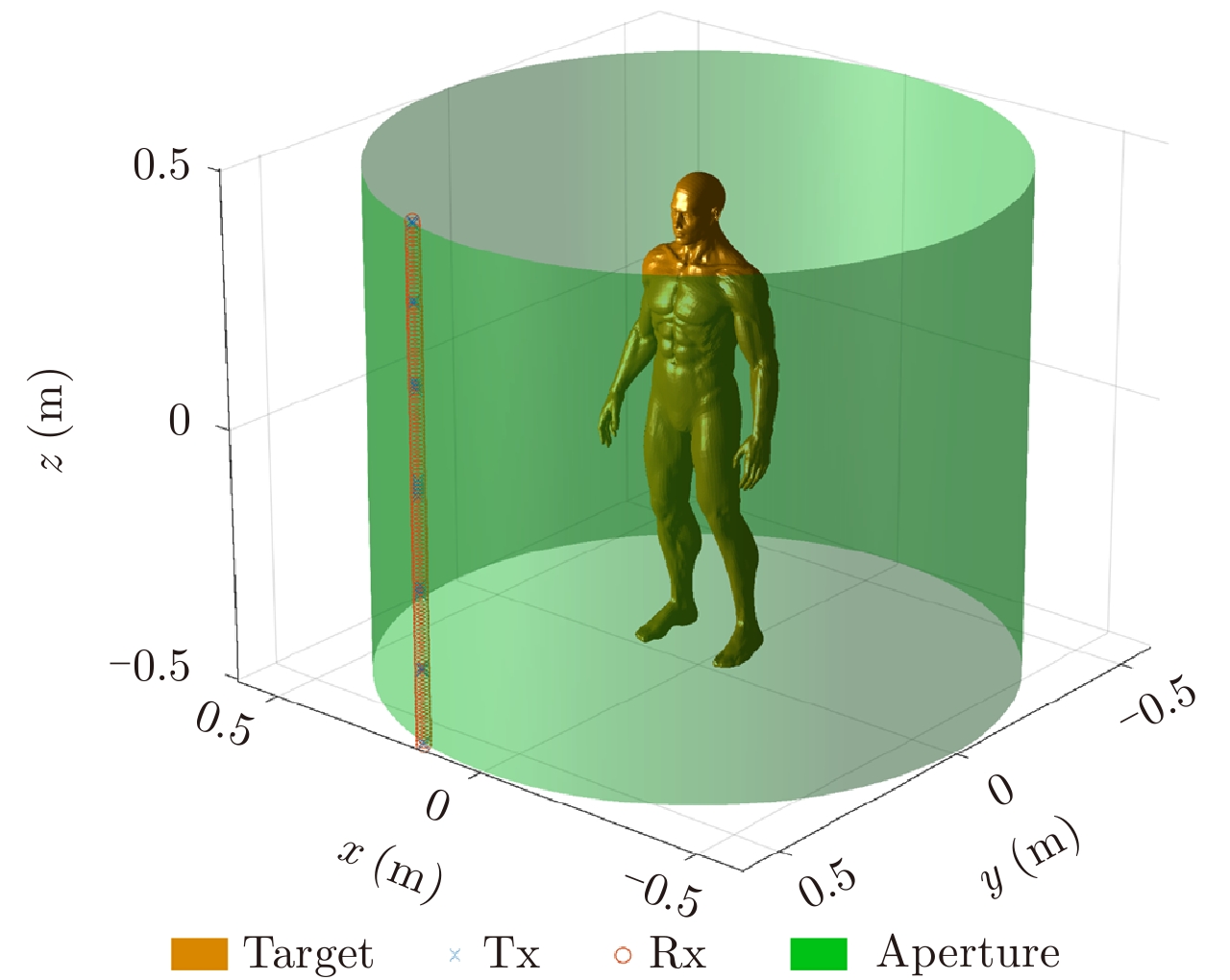
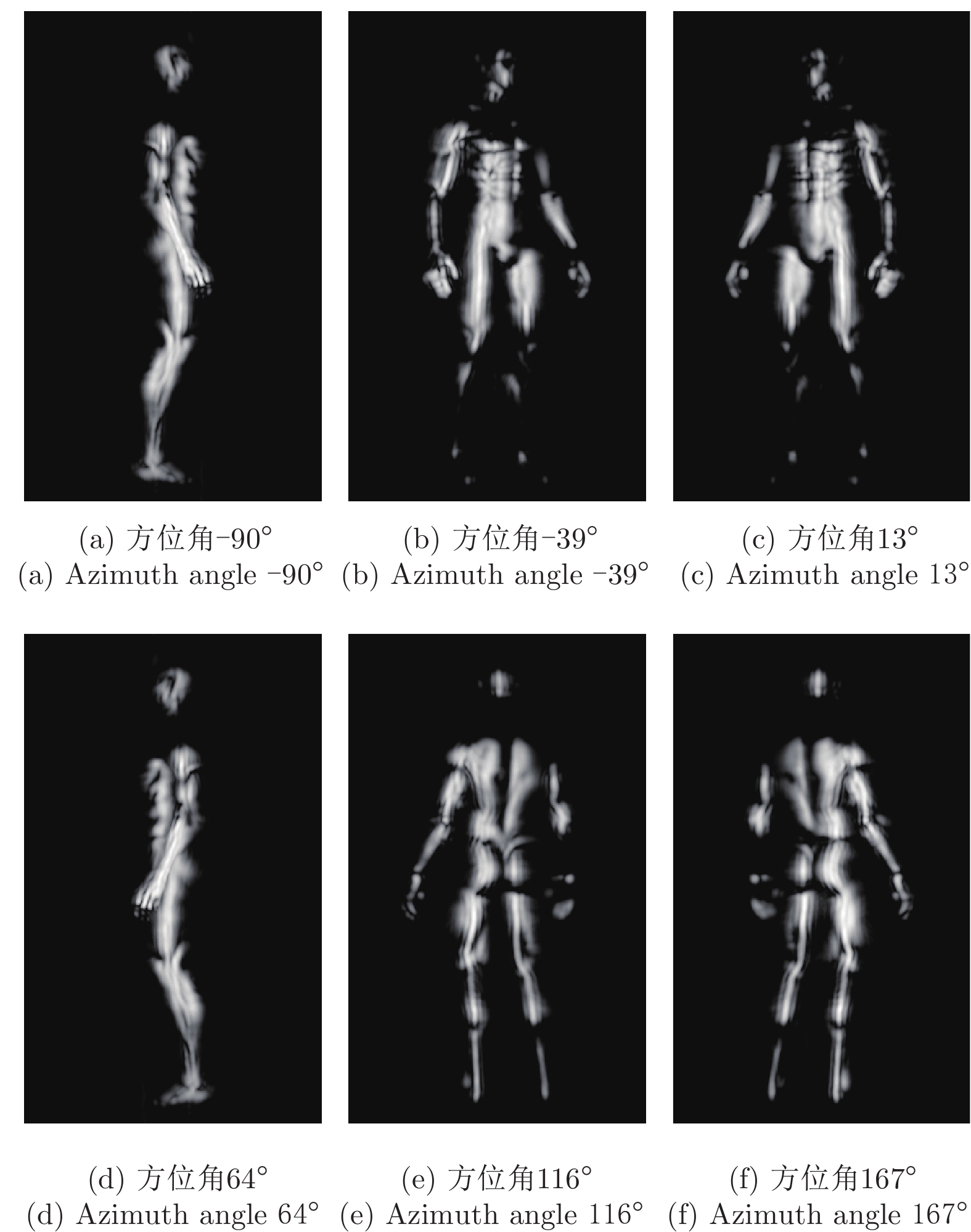
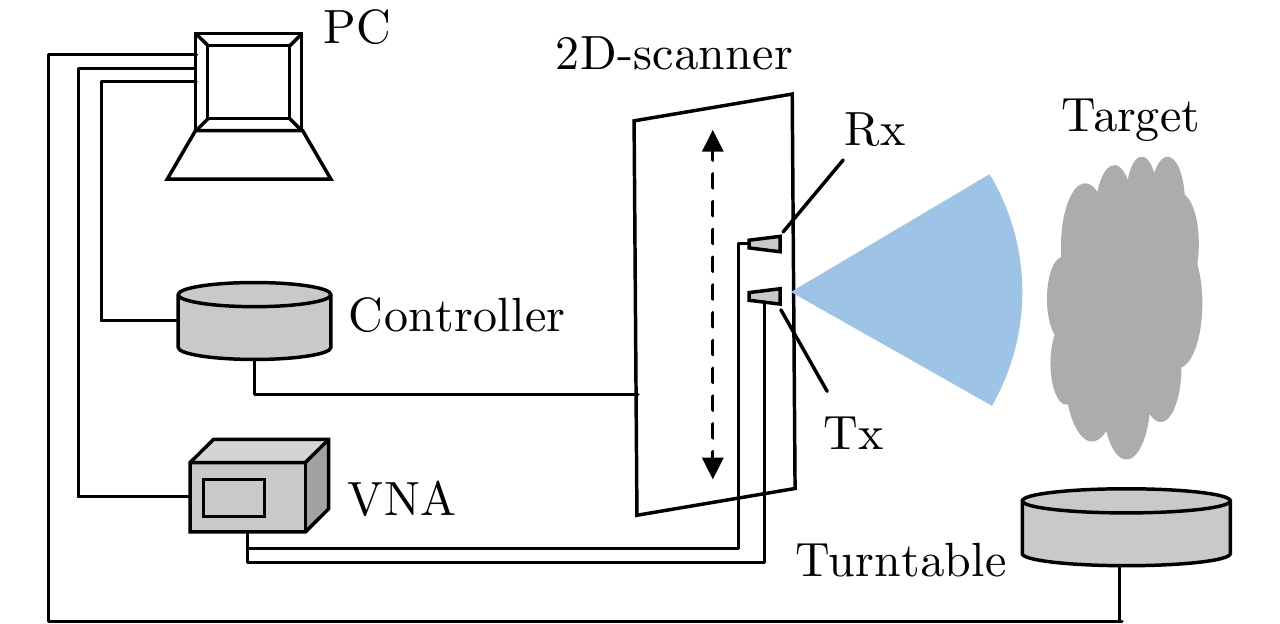
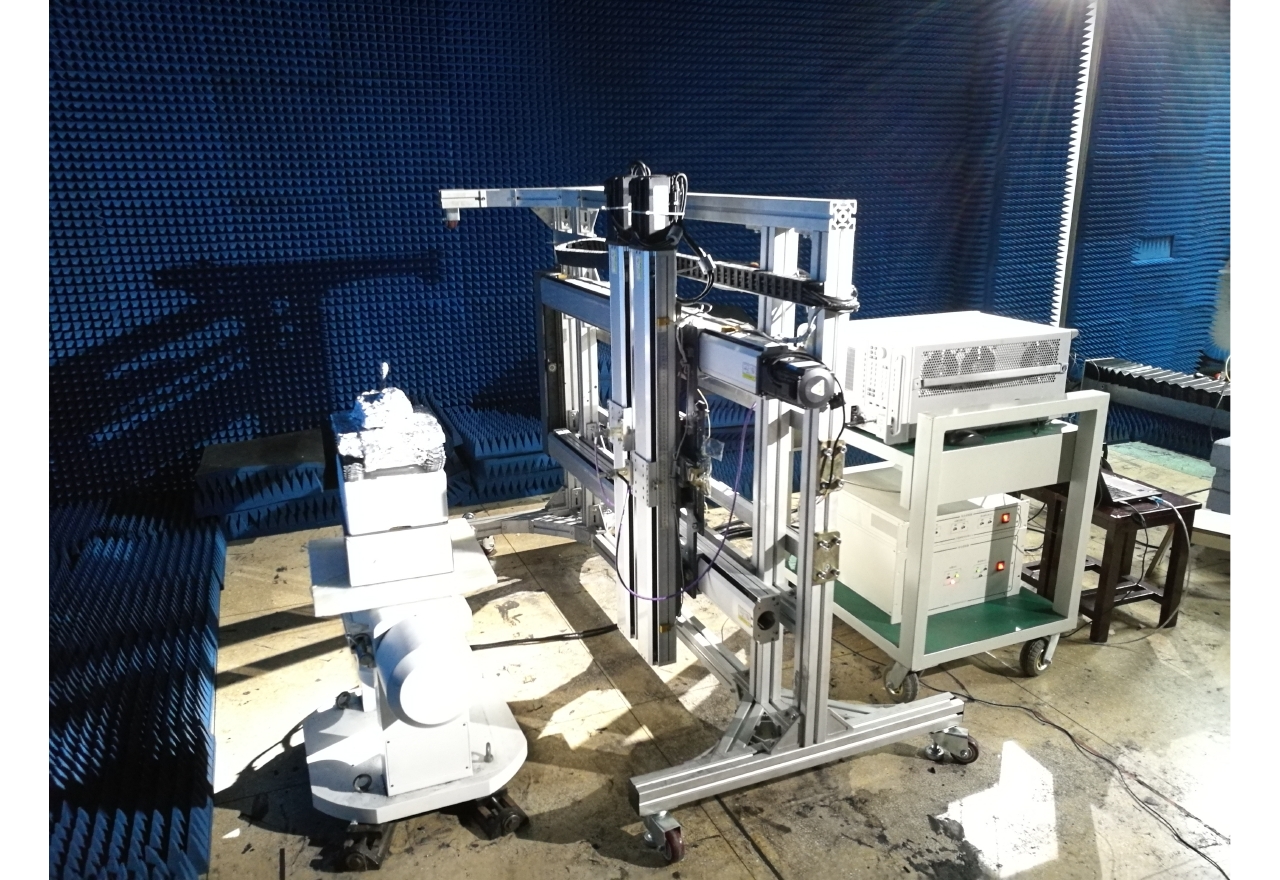
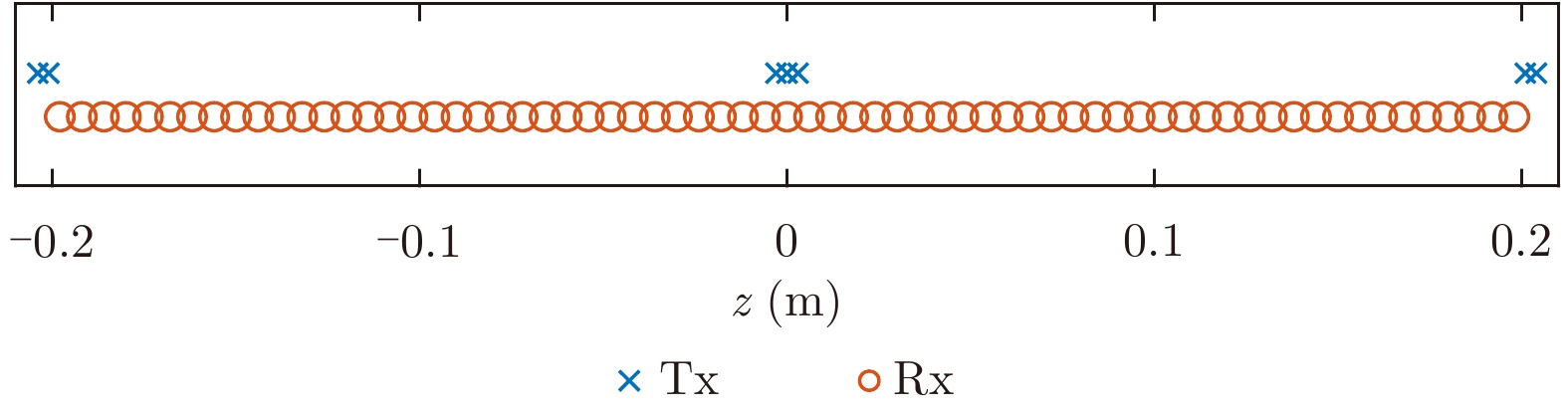
基于扫描阵列的近场3维成像是合成孔径雷达(SAR)3维成像技术在民用领域的一种重要应用形式。“多发多收(MIMO)-扫描”体制是该领域一种独特的成像方式。相比于“单发单收(SISO)”阵列,MIMO阵列具有成像质量好、阵元利用率高、对天线间隔要求宽松以及成本低等特点。该文分别从信号模型、成像算法、实验系统和成像结果等方面介绍了“MIMO-平面扫”和“MIMO-柱面扫”两种成像体制。所得结果充分展现了该成像技术在许多场景中的巨大应用潜力。 基于扫描阵列的近场3维成像是合成孔径雷达(SAR)3维成像技术在民用领域的一种重要应用形式。“多发多收(MIMO)-扫描”体制是该领域一种独特的成像方式。相比于“单发单收(SISO)”阵列,MIMO阵列具有成像质量好、阵元利用率高、对天线间隔要求宽松以及成本低等特点。该文分别从信号模型、成像算法、实验系统和成像结果等方面介绍了“MIMO-平面扫”和“MIMO-柱面扫”两种成像体制。所得结果充分展现了该成像技术在许多场景中的巨大应用潜力。
基于扫描阵列的近场3维成像是合成孔径雷达(SAR)3维成像技术在民用领域的一种重要应用形式。“多发多收(MIMO)-扫描”体制是该领域一种独特的成像方式。相比于“单发单收(SISO)”阵列,MIMO阵列具有成像质量好、阵元利用率高、对天线间隔要求宽松以及成本低等特点。该文分别从信号模型、成像算法、实验系统和成像结果等方面介绍了“MIMO-平面扫”和“MIMO-柱面扫”两种成像体制。所得结果充分展现了该成像技术在许多场景中的巨大应用潜力。 基于扫描阵列的近场3维成像是合成孔径雷达(SAR)3维成像技术在民用领域的一种重要应用形式。“多发多收(MIMO)-扫描”体制是该领域一种独特的成像方式。相比于“单发单收(SISO)”阵列,MIMO阵列具有成像质量好、阵元利用率高、对天线间隔要求宽松以及成本低等特点。该文分别从信号模型、成像算法、实验系统和成像结果等方面介绍了“MIMO-平面扫”和“MIMO-柱面扫”两种成像体制。所得结果充分展现了该成像技术在许多场景中的巨大应用潜力。




2018, 7(6): 685-695.
摘要:
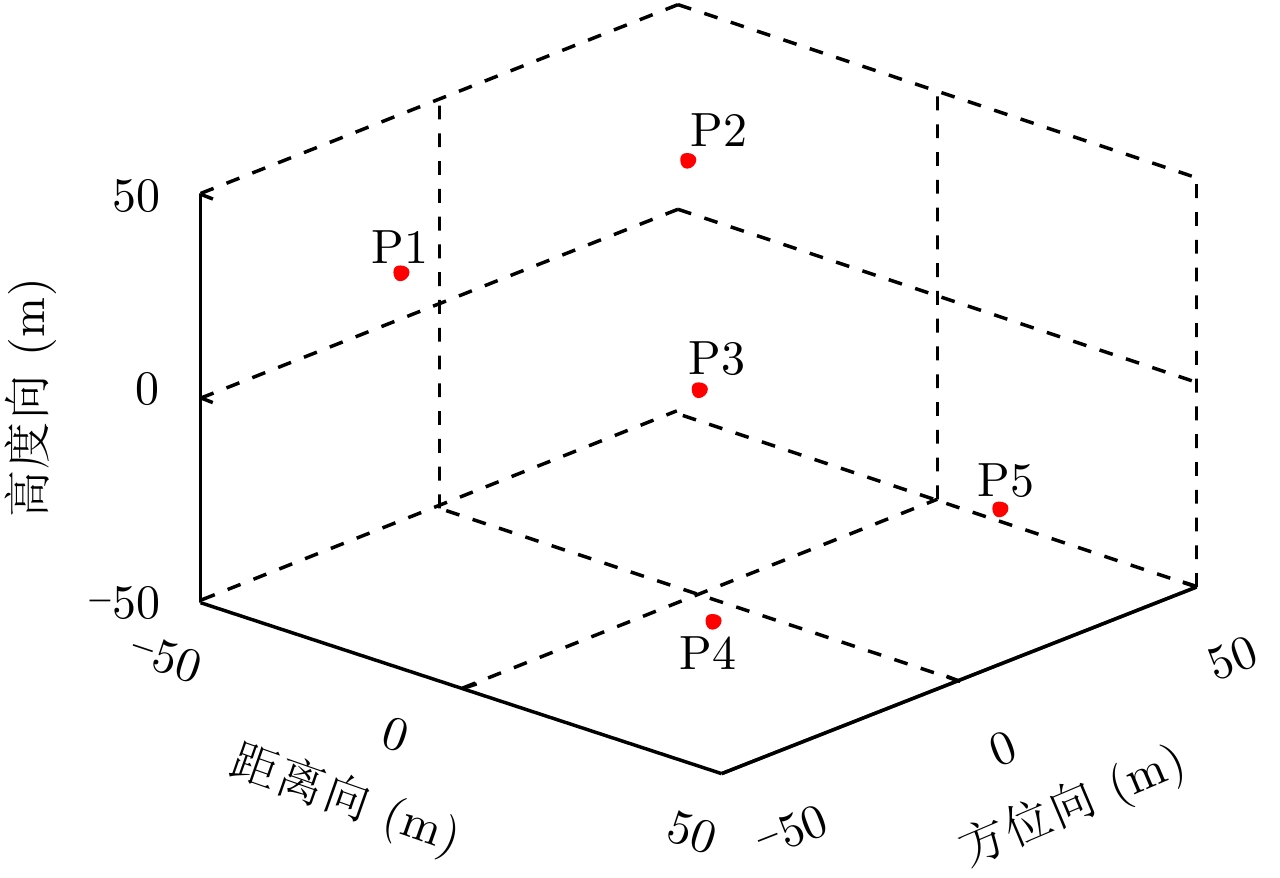
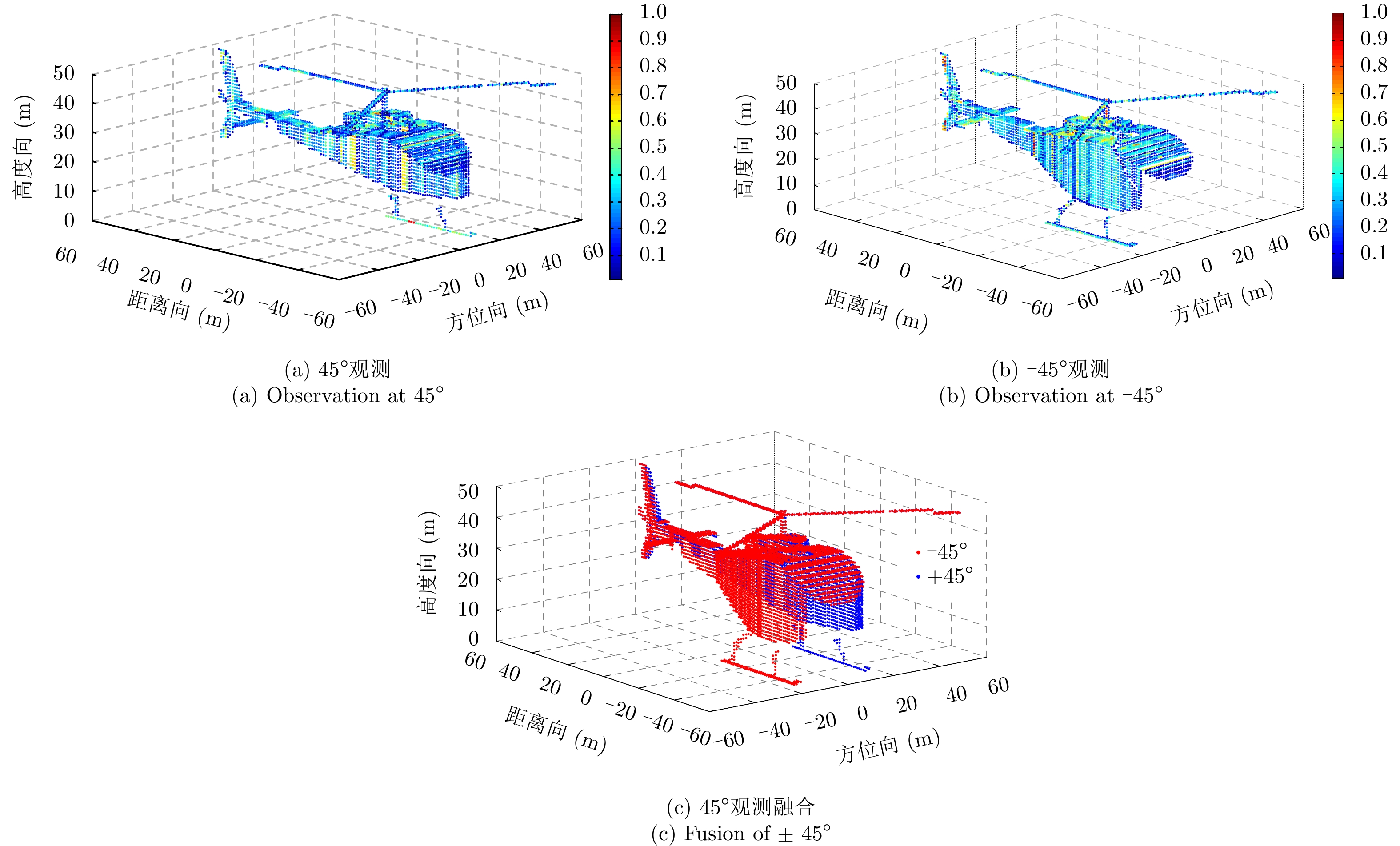
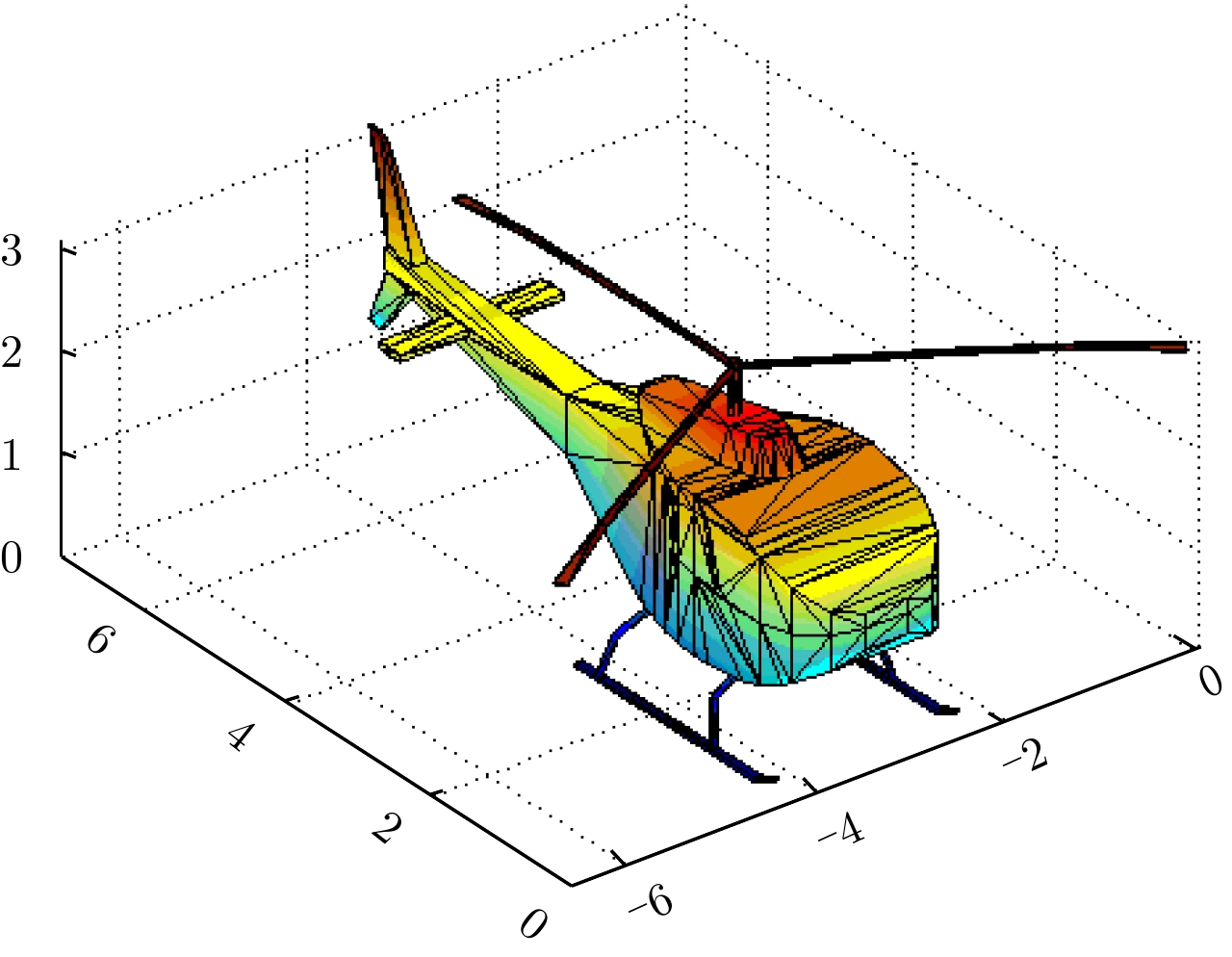
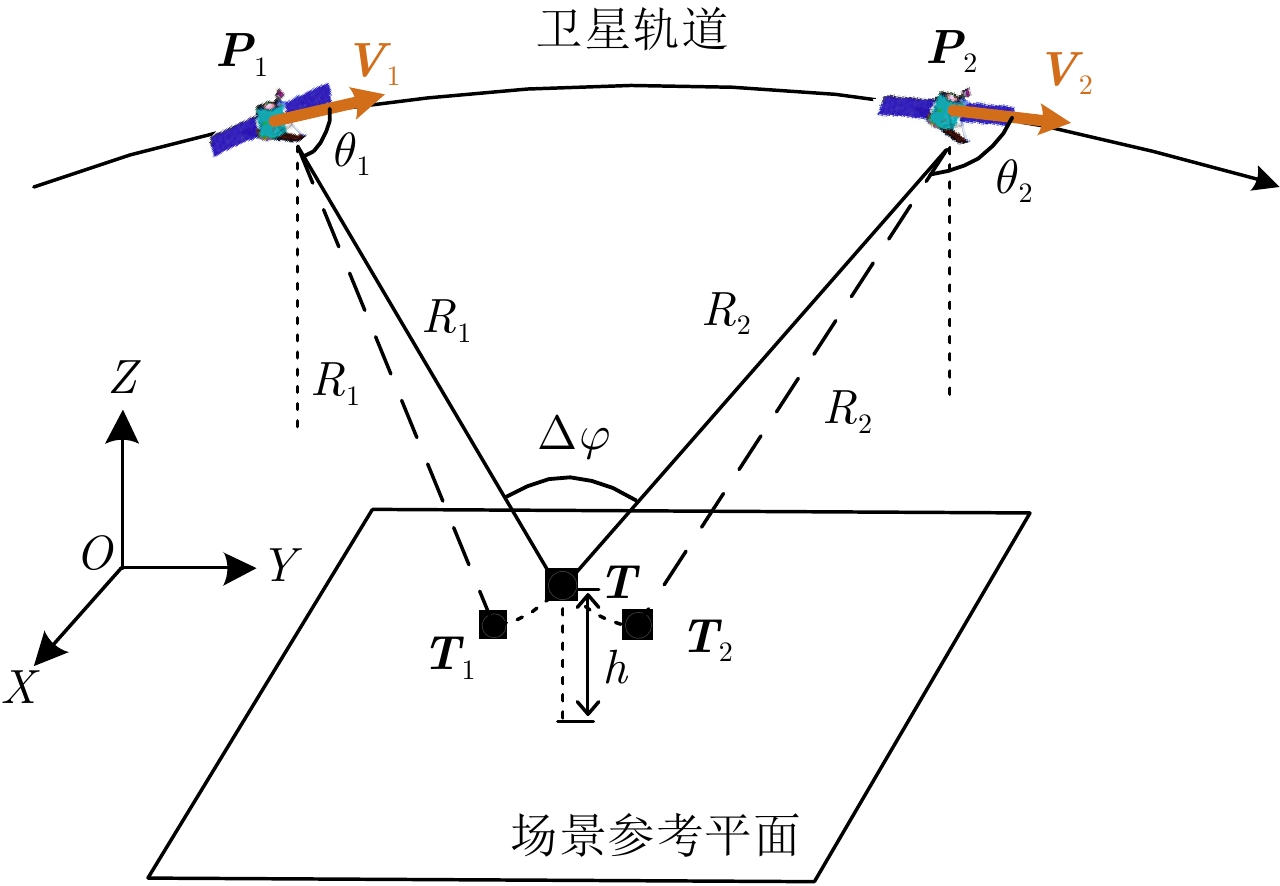
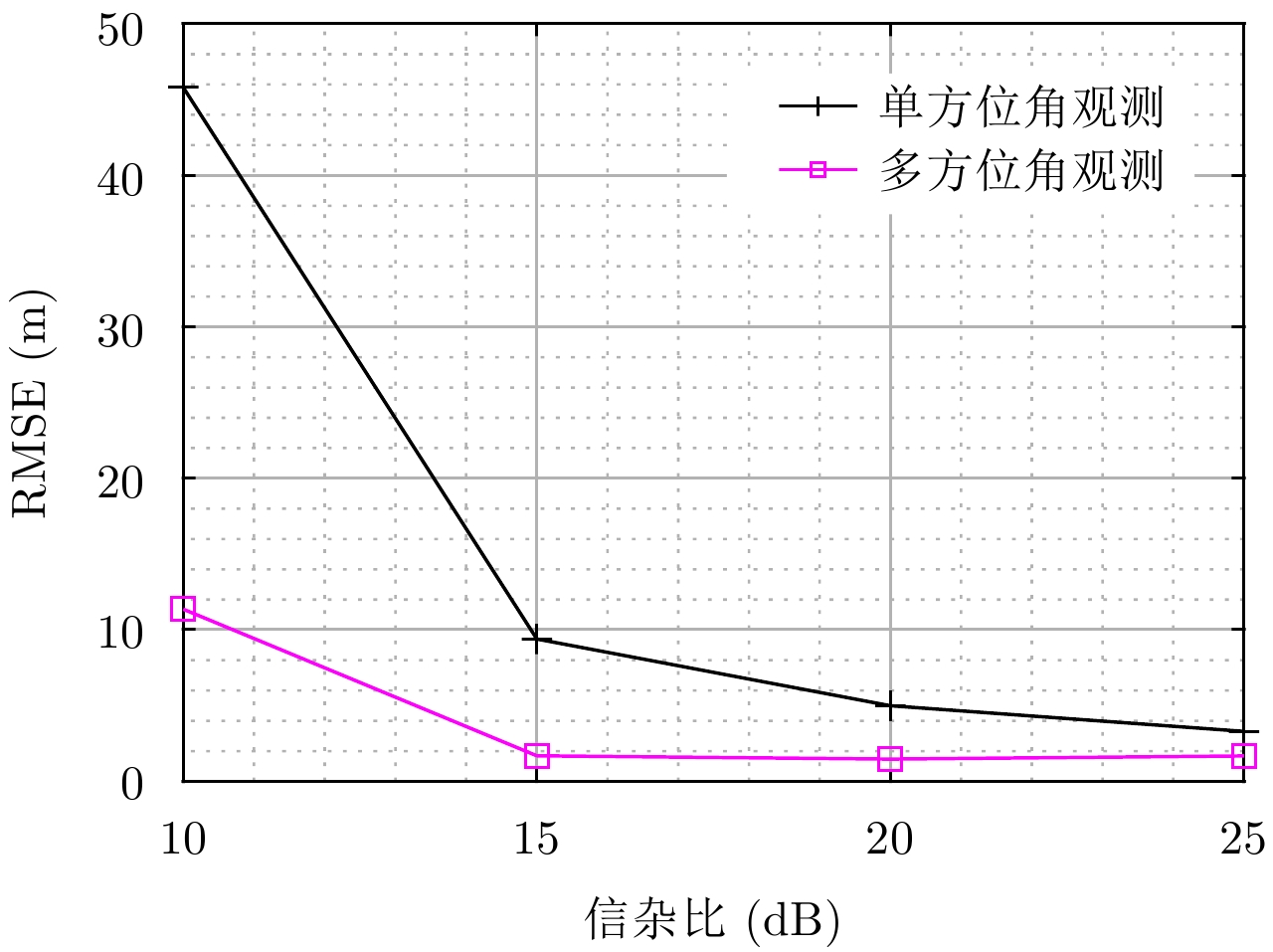
传统星载合成孔径雷达(Sythetic Aperture Radar, SAR)采用多基线的方式可获取目标区域的3维图像,解决了SAR 2维图像中的叠掩问题,但仍存在因遮挡导致的信息获取不足的问题。为此,该文首次提出了多方位角多基线星载SAR 3维成像方法,其不仅解决了叠掩问题,还通过融合不同方位角下获取的3维点云减少了遮挡区域,提升了星载SAR信息获取能力。文中首先建立多方位角多基线星载SAR空间观测模型,并通过推导论证斜视多基线观测和正侧视多基线观测具有相同的数学信号模型,为直接将正侧视时的3维成像方法应用于斜视时的3维处理提供理论支撑;在此基础上,给出多方位角多基线星载SAR 3维成像方法及处理流程,其包括SAR斜视3维处理和多方位角3维点云融合两个步骤;最后,通过方位角45°下的点阵目标实验验证SAR斜视3维处理方法的有效性,并利用方位角45°和–45°下的直升机目标仿真验证多方位角3维点云融合方法的有效性。 传统星载合成孔径雷达(Sythetic Aperture Radar, SAR)采用多基线的方式可获取目标区域的3维图像,解决了SAR 2维图像中的叠掩问题,但仍存在因遮挡导致的信息获取不足的问题。为此,该文首次提出了多方位角多基线星载SAR 3维成像方法,其不仅解决了叠掩问题,还通过融合不同方位角下获取的3维点云减少了遮挡区域,提升了星载SAR信息获取能力。文中首先建立多方位角多基线星载SAR空间观测模型,并通过推导论证斜视多基线观测和正侧视多基线观测具有相同的数学信号模型,为直接将正侧视时的3维成像方法应用于斜视时的3维处理提供理论支撑;在此基础上,给出多方位角多基线星载SAR 3维成像方法及处理流程,其包括SAR斜视3维处理和多方位角3维点云融合两个步骤;最后,通过方位角45°下的点阵目标实验验证SAR斜视3维处理方法的有效性,并利用方位角45°和–45°下的直升机目标仿真验证多方位角3维点云融合方法的有效性。
传统星载合成孔径雷达(Sythetic Aperture Radar, SAR)采用多基线的方式可获取目标区域的3维图像,解决了SAR 2维图像中的叠掩问题,但仍存在因遮挡导致的信息获取不足的问题。为此,该文首次提出了多方位角多基线星载SAR 3维成像方法,其不仅解决了叠掩问题,还通过融合不同方位角下获取的3维点云减少了遮挡区域,提升了星载SAR信息获取能力。文中首先建立多方位角多基线星载SAR空间观测模型,并通过推导论证斜视多基线观测和正侧视多基线观测具有相同的数学信号模型,为直接将正侧视时的3维成像方法应用于斜视时的3维处理提供理论支撑;在此基础上,给出多方位角多基线星载SAR 3维成像方法及处理流程,其包括SAR斜视3维处理和多方位角3维点云融合两个步骤;最后,通过方位角45°下的点阵目标实验验证SAR斜视3维处理方法的有效性,并利用方位角45°和–45°下的直升机目标仿真验证多方位角3维点云融合方法的有效性。 传统星载合成孔径雷达(Sythetic Aperture Radar, SAR)采用多基线的方式可获取目标区域的3维图像,解决了SAR 2维图像中的叠掩问题,但仍存在因遮挡导致的信息获取不足的问题。为此,该文首次提出了多方位角多基线星载SAR 3维成像方法,其不仅解决了叠掩问题,还通过融合不同方位角下获取的3维点云减少了遮挡区域,提升了星载SAR信息获取能力。文中首先建立多方位角多基线星载SAR空间观测模型,并通过推导论证斜视多基线观测和正侧视多基线观测具有相同的数学信号模型,为直接将正侧视时的3维成像方法应用于斜视时的3维处理提供理论支撑;在此基础上,给出多方位角多基线星载SAR 3维成像方法及处理流程,其包括SAR斜视3维处理和多方位角3维点云融合两个步骤;最后,通过方位角45°下的点阵目标实验验证SAR斜视3维处理方法的有效性,并利用方位角45°和–45°下的直升机目标仿真验证多方位角3维点云融合方法的有效性。





2018, 7(6): 696-704.
摘要:
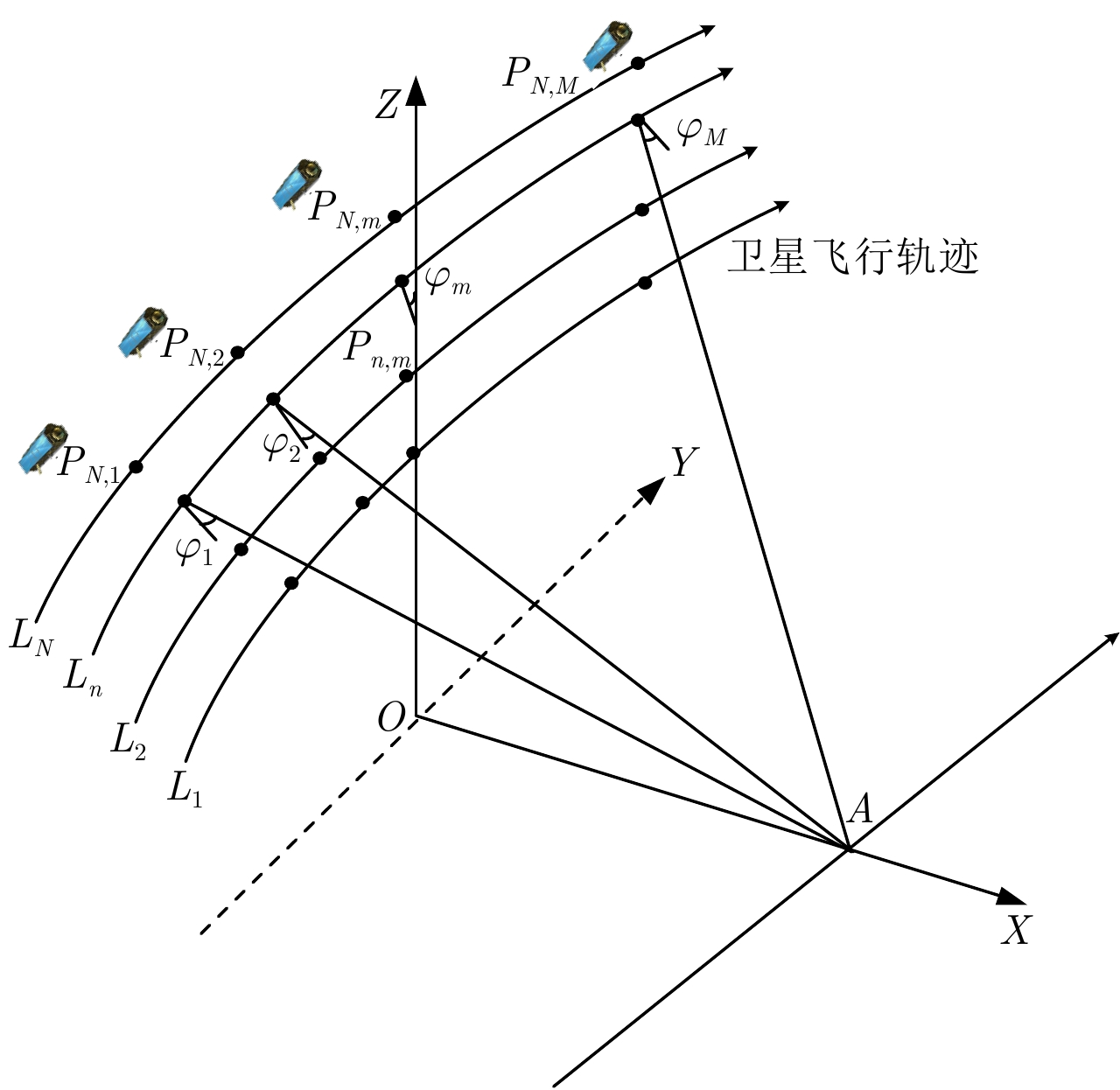
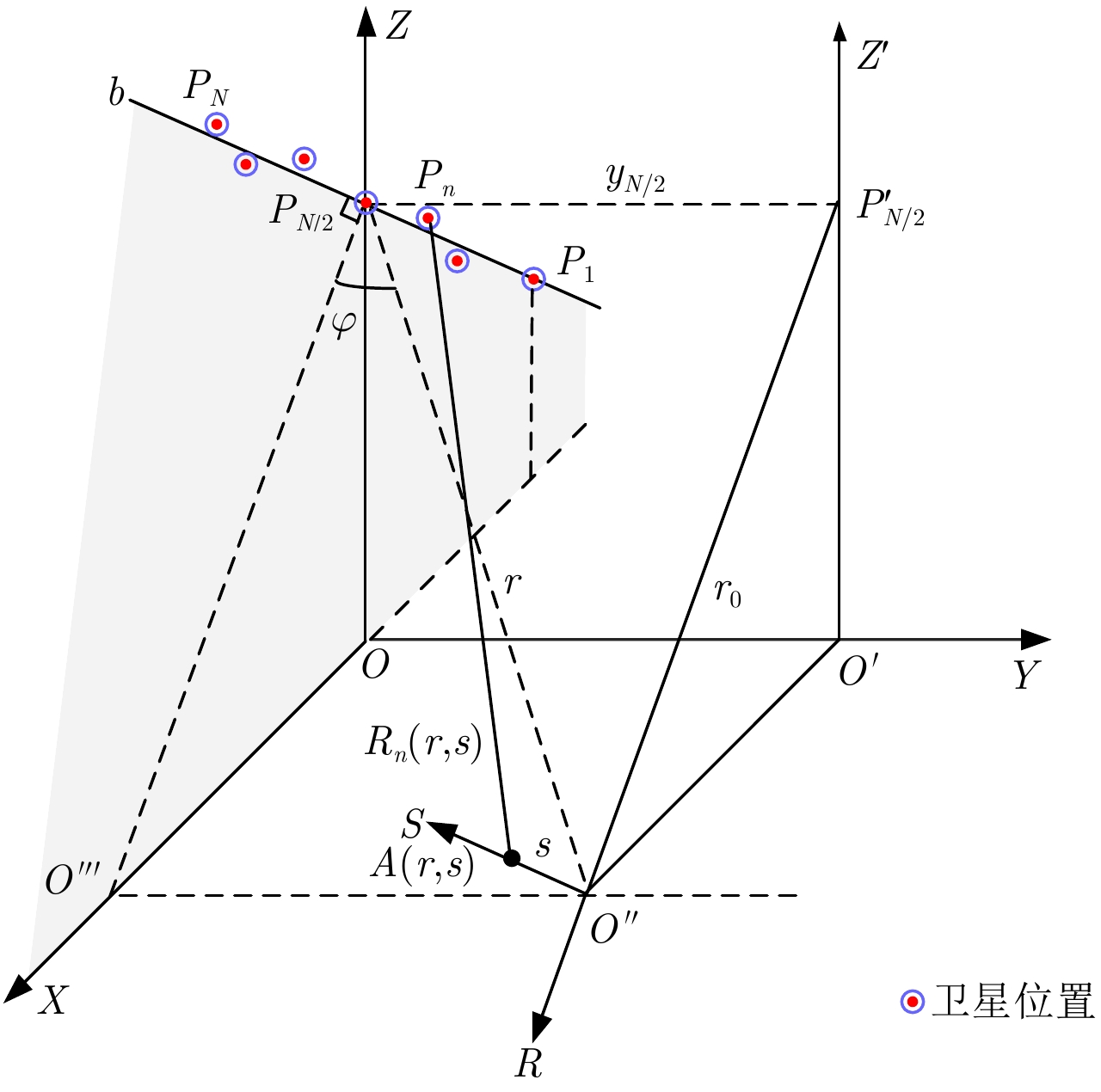
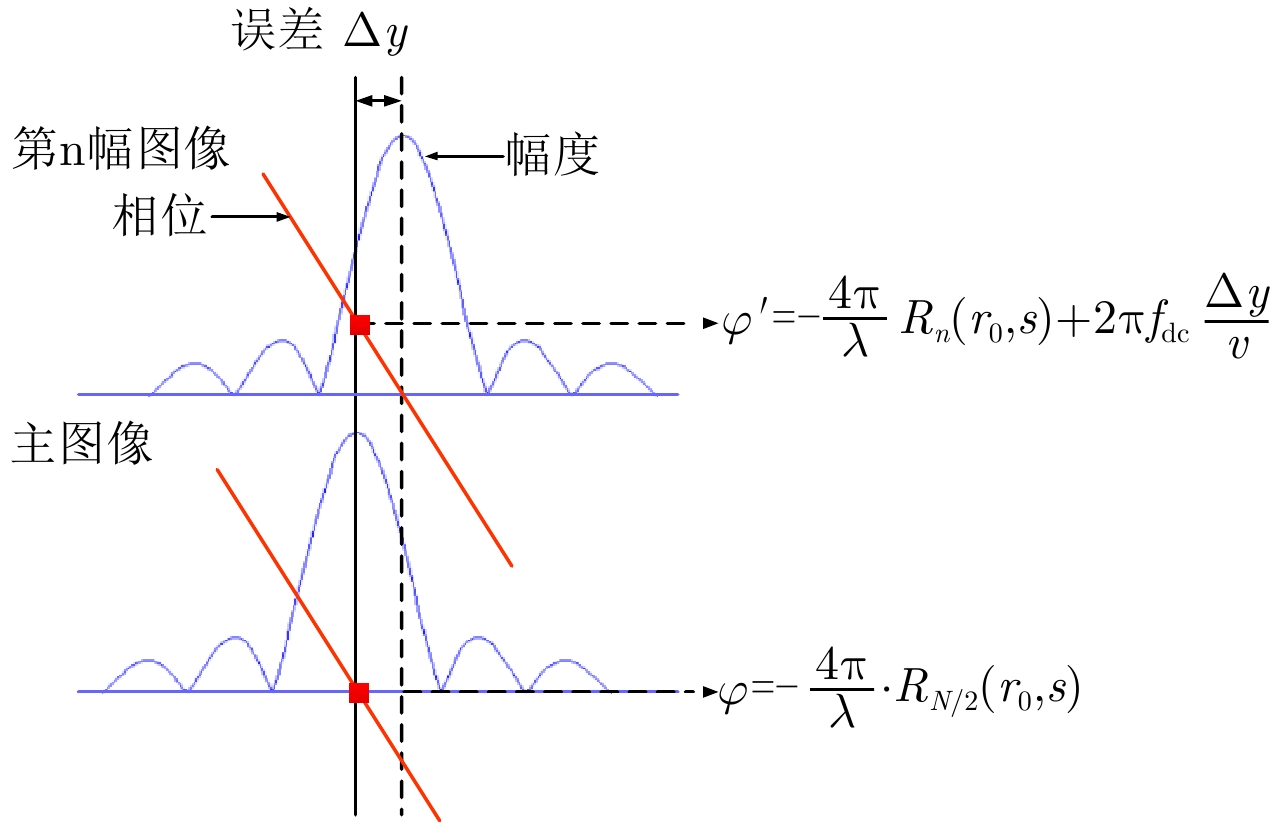
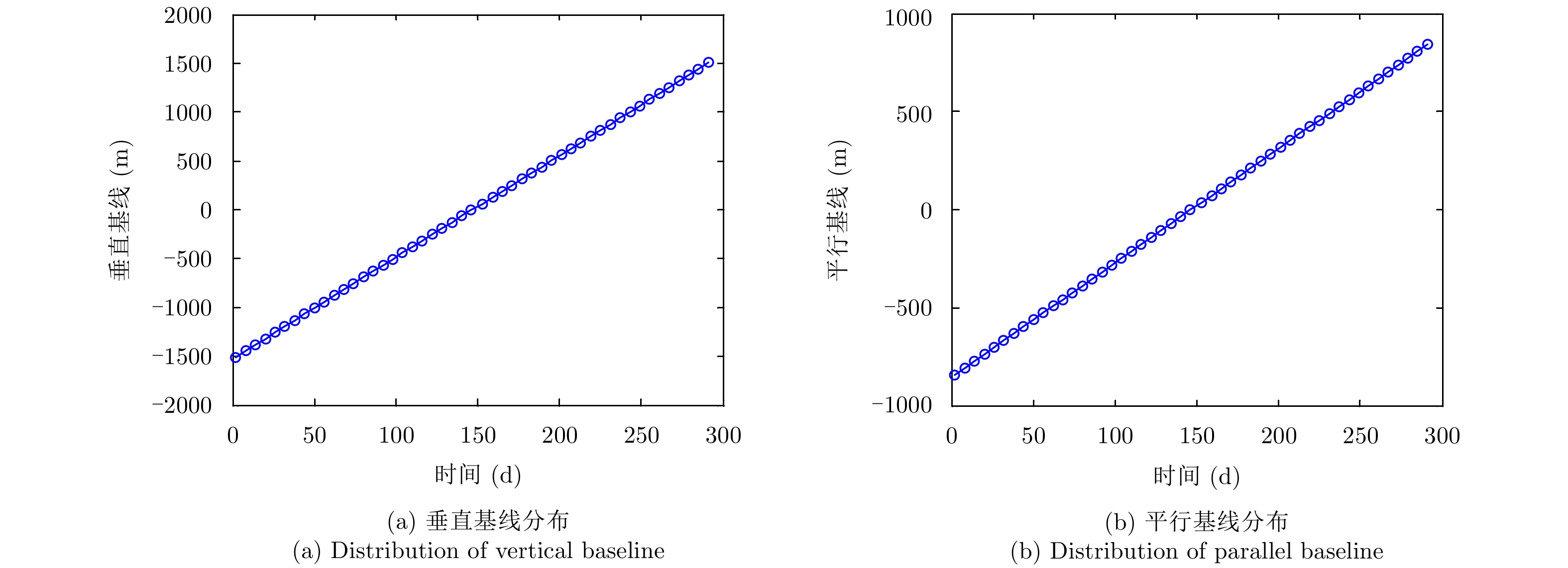
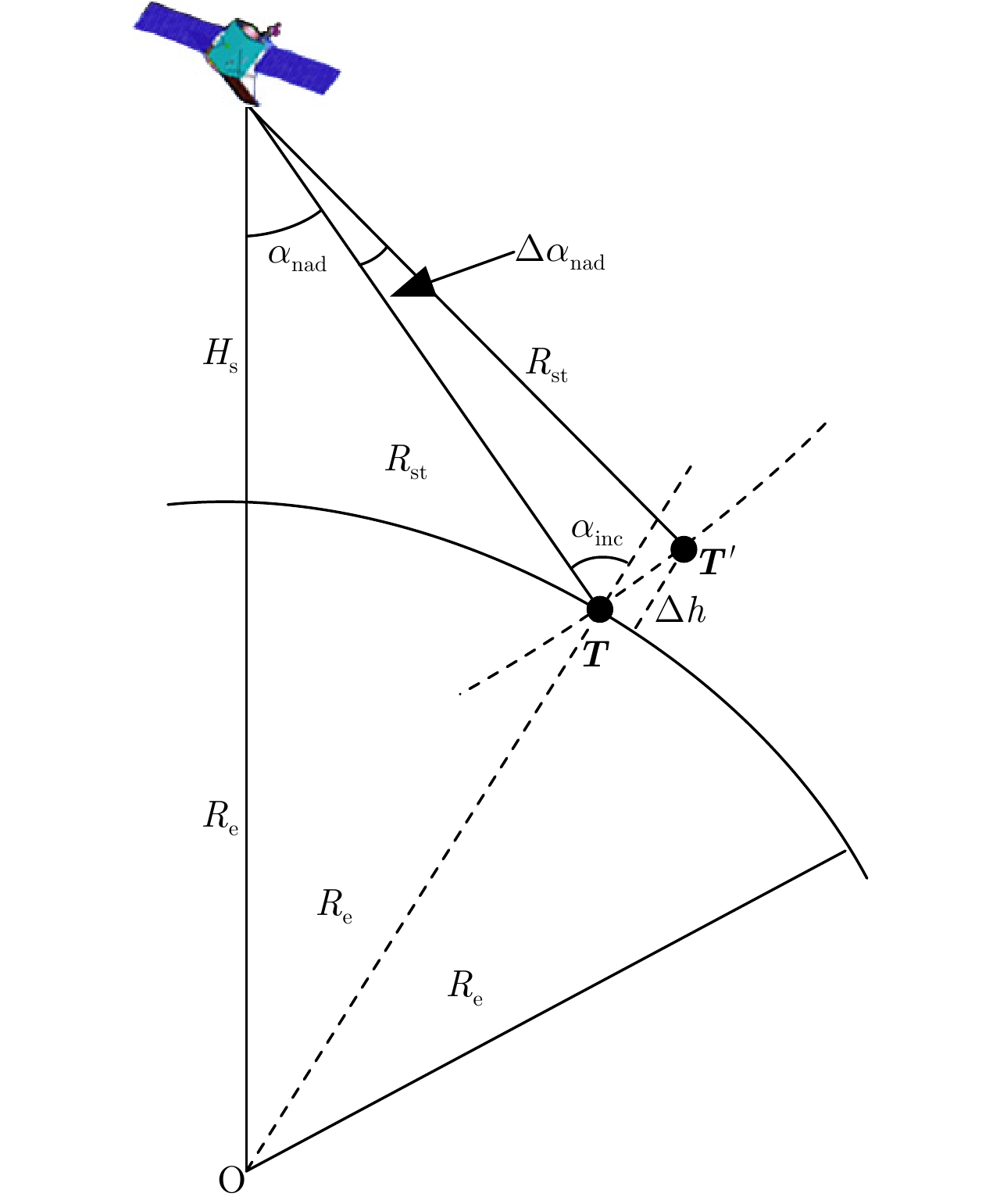
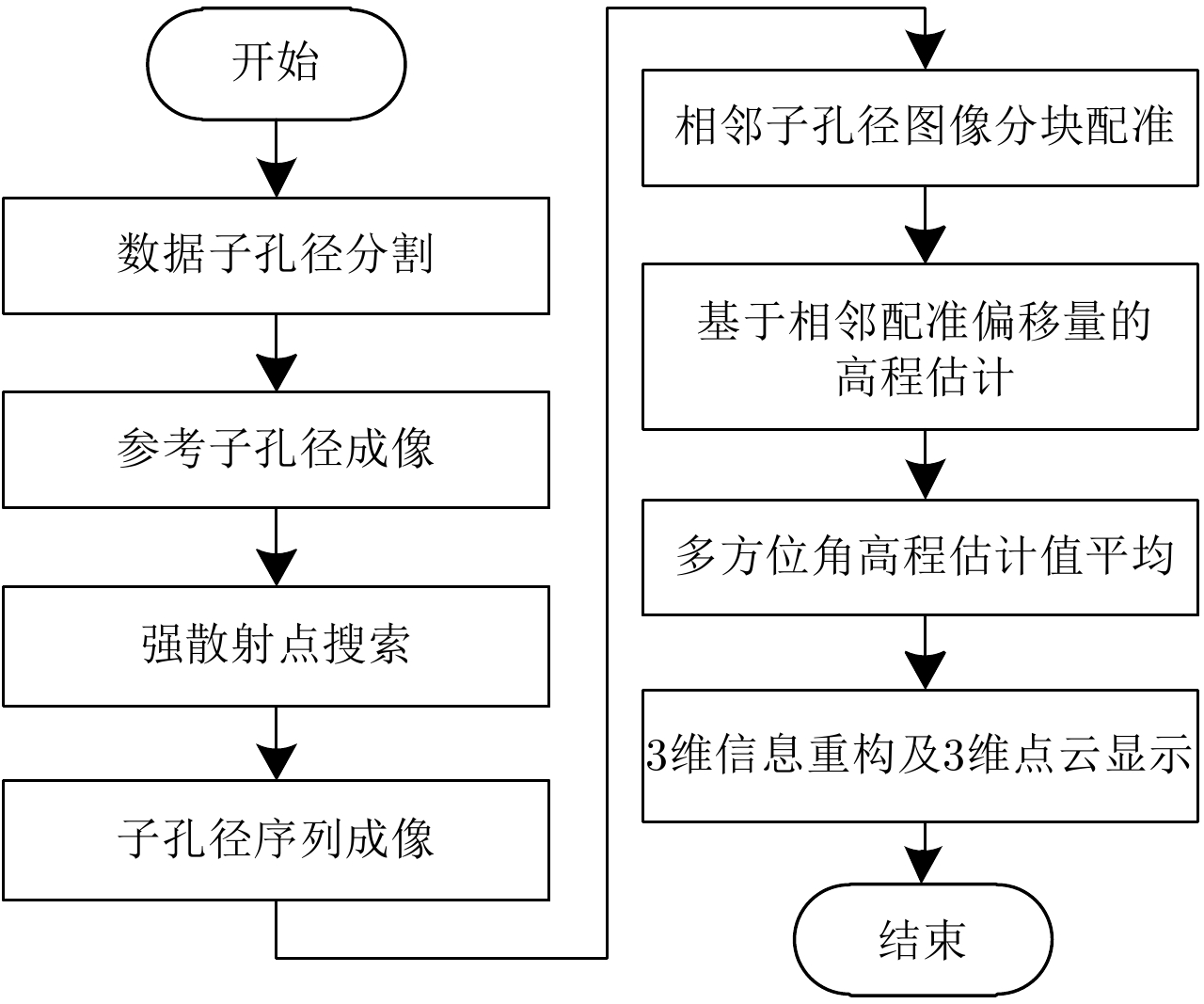
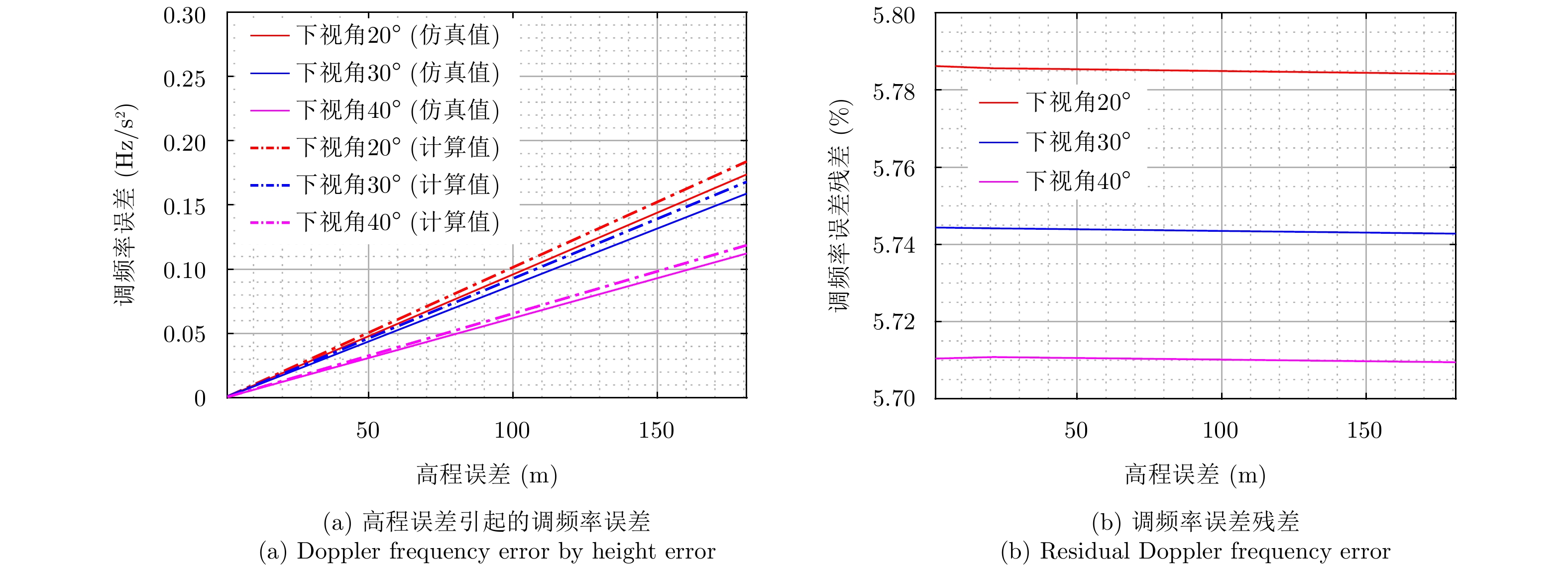
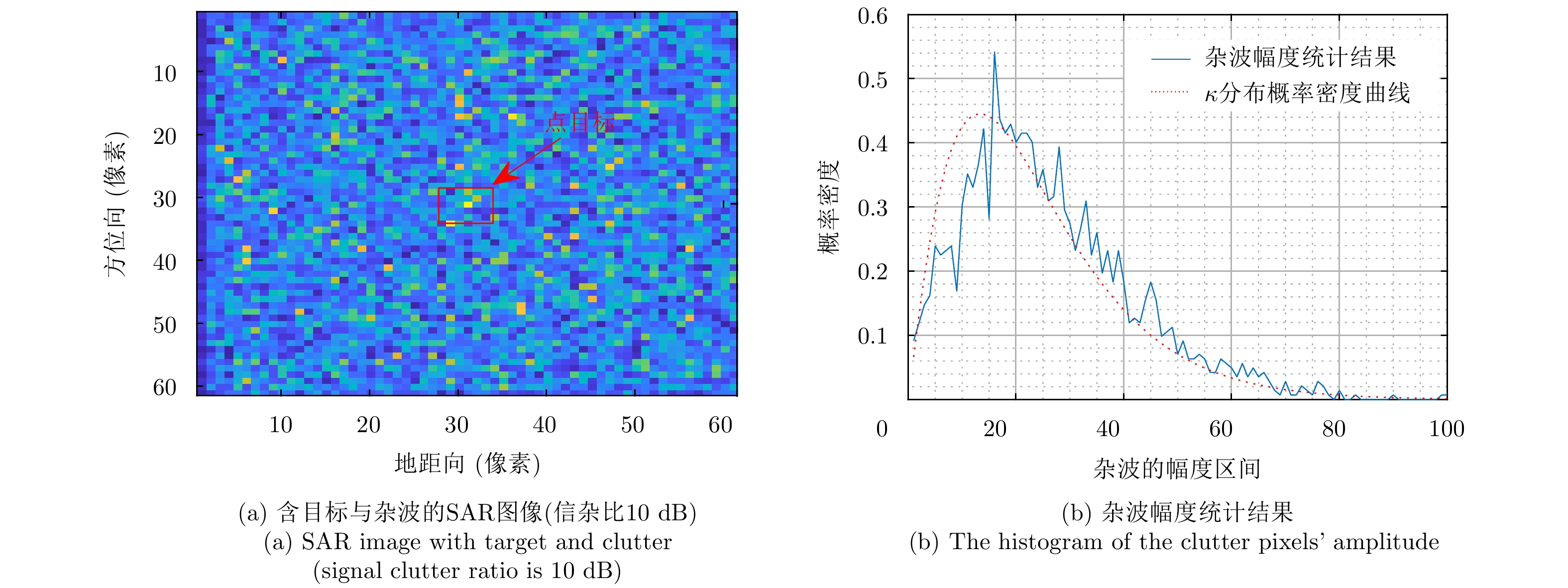
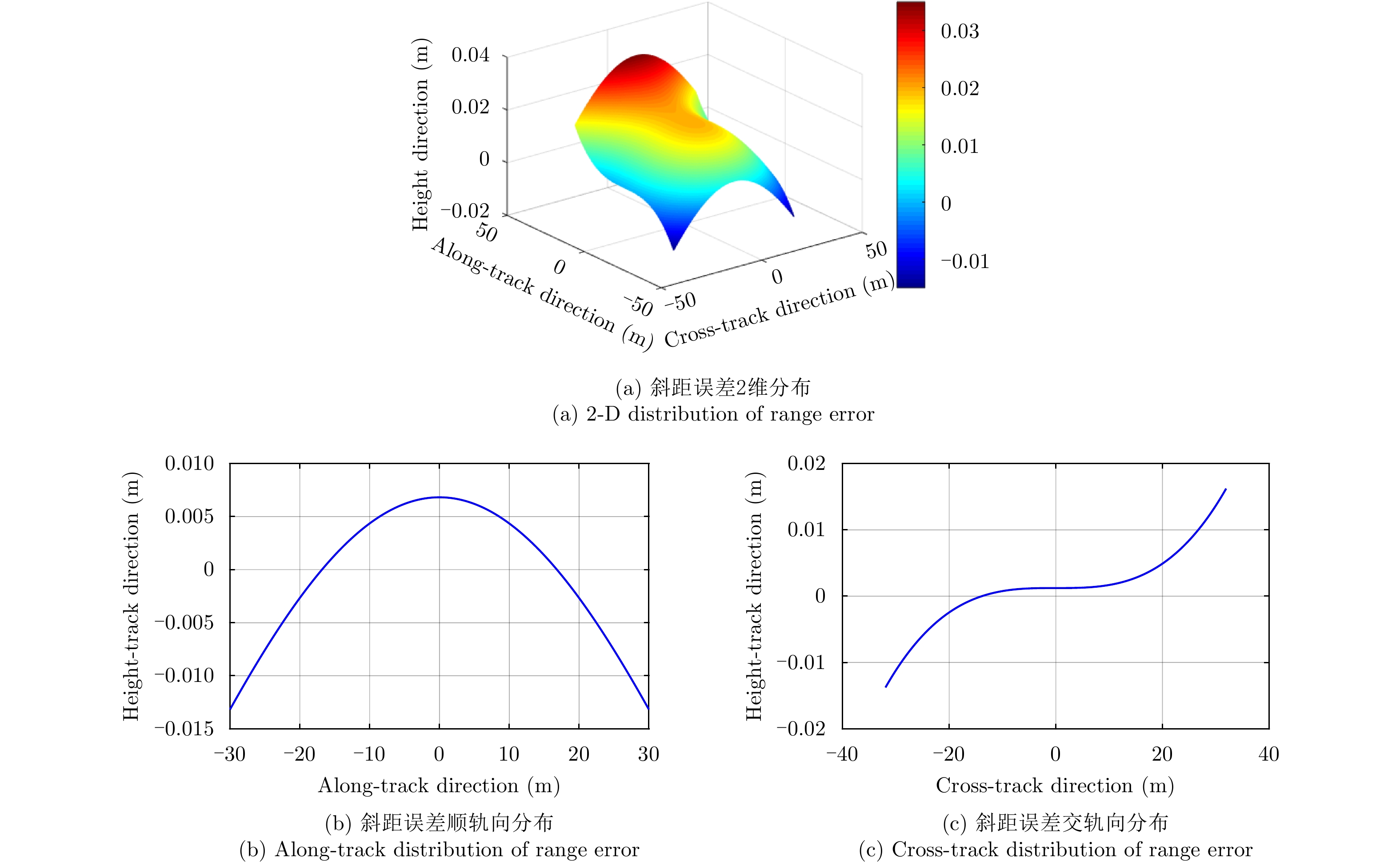
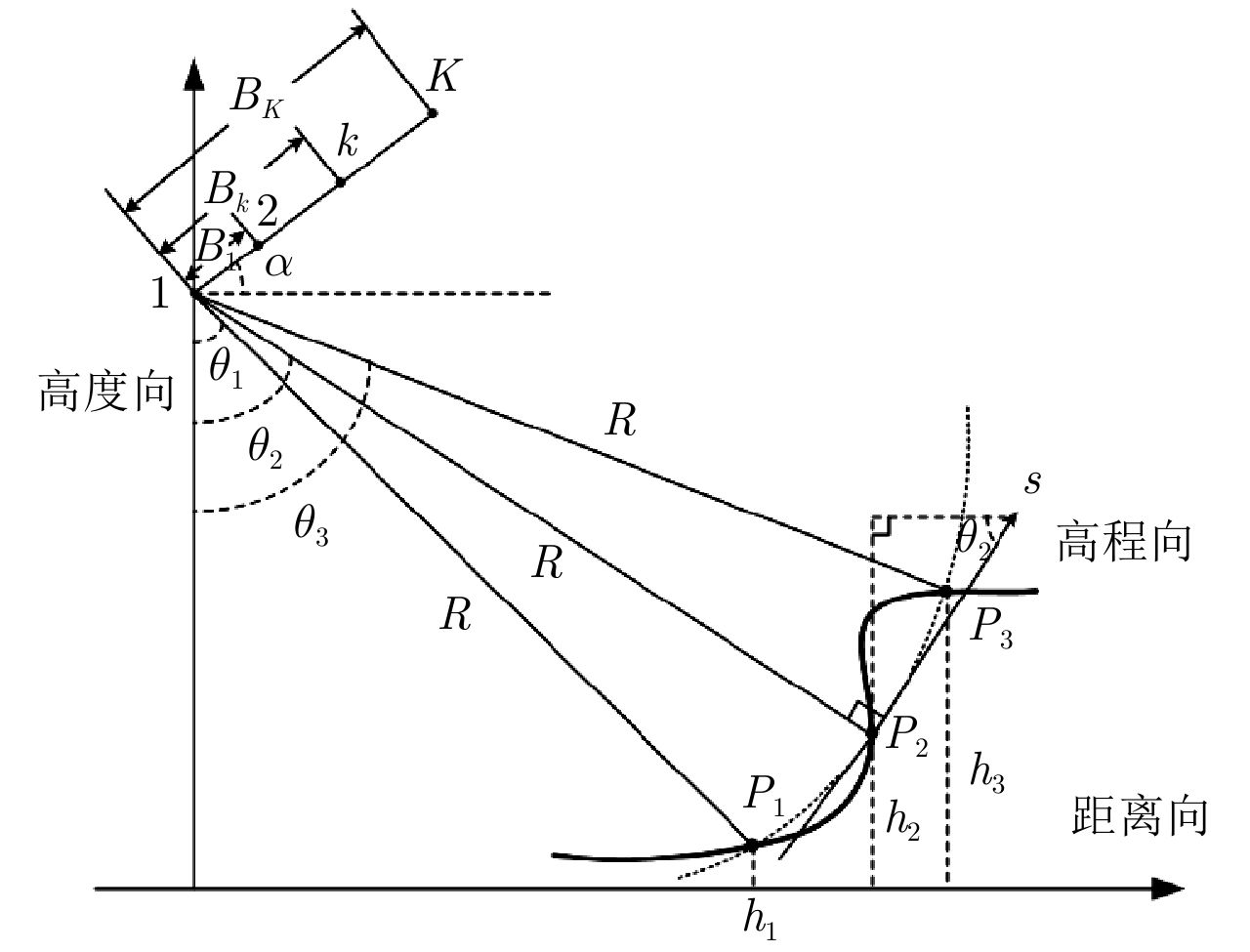
星载合成孔径雷达(Synthetic Aperture Radar, SAR)通过波束的方位向扫描可以实现单次航过的多方位观测。在多方位角观测过程中,卫星弯曲轨道可等效为长3维曲线阵列,从而具备了3维成像能力。由于多方位角观测在高度维采样的稀疏性,无法直接通过3维FFT实现无模糊成像,且目标在不同方位角SAR图像的投影与高程间的传递相对复杂。针对该问题,该文提出了联合多方位角调频率估计的星载SAR3维成像方法。该方法首先给出了不同观测方位角下多普勒调频率误差与目标高程误差间的关系,利用视错位法(Map Drift, MD)估计多普勒调频率误差。然后,联合多方位角高程估计结果提升高程估计精度。最后,利用高程估计结果恢复目标3维几何信息,从而实现3维成像。仿真实验验证了该方法的高程估计精度可达米级。 星载合成孔径雷达(Synthetic Aperture Radar, SAR)通过波束的方位向扫描可以实现单次航过的多方位观测。在多方位角观测过程中,卫星弯曲轨道可等效为长3维曲线阵列,从而具备了3维成像能力。由于多方位角观测在高度维采样的稀疏性,无法直接通过3维FFT实现无模糊成像,且目标在不同方位角SAR图像的投影与高程间的传递相对复杂。针对该问题,该文提出了联合多方位角调频率估计的星载SAR3维成像方法。该方法首先给出了不同观测方位角下多普勒调频率误差与目标高程误差间的关系,利用视错位法(Map Drift, MD)估计多普勒调频率误差。然后,联合多方位角高程估计结果提升高程估计精度。最后,利用高程估计结果恢复目标3维几何信息,从而实现3维成像。仿真实验验证了该方法的高程估计精度可达米级。
星载合成孔径雷达(Synthetic Aperture Radar, SAR)通过波束的方位向扫描可以实现单次航过的多方位观测。在多方位角观测过程中,卫星弯曲轨道可等效为长3维曲线阵列,从而具备了3维成像能力。由于多方位角观测在高度维采样的稀疏性,无法直接通过3维FFT实现无模糊成像,且目标在不同方位角SAR图像的投影与高程间的传递相对复杂。针对该问题,该文提出了联合多方位角调频率估计的星载SAR3维成像方法。该方法首先给出了不同观测方位角下多普勒调频率误差与目标高程误差间的关系,利用视错位法(Map Drift, MD)估计多普勒调频率误差。然后,联合多方位角高程估计结果提升高程估计精度。最后,利用高程估计结果恢复目标3维几何信息,从而实现3维成像。仿真实验验证了该方法的高程估计精度可达米级。 星载合成孔径雷达(Synthetic Aperture Radar, SAR)通过波束的方位向扫描可以实现单次航过的多方位观测。在多方位角观测过程中,卫星弯曲轨道可等效为长3维曲线阵列,从而具备了3维成像能力。由于多方位角观测在高度维采样的稀疏性,无法直接通过3维FFT实现无模糊成像,且目标在不同方位角SAR图像的投影与高程间的传递相对复杂。针对该问题,该文提出了联合多方位角调频率估计的星载SAR3维成像方法。该方法首先给出了不同观测方位角下多普勒调频率误差与目标高程误差间的关系,利用视错位法(Map Drift, MD)估计多普勒调频率误差。然后,联合多方位角高程估计结果提升高程估计精度。最后,利用高程估计结果恢复目标3维几何信息,从而实现3维成像。仿真实验验证了该方法的高程估计精度可达米级。




2018, 7(6): 705-716.
摘要:
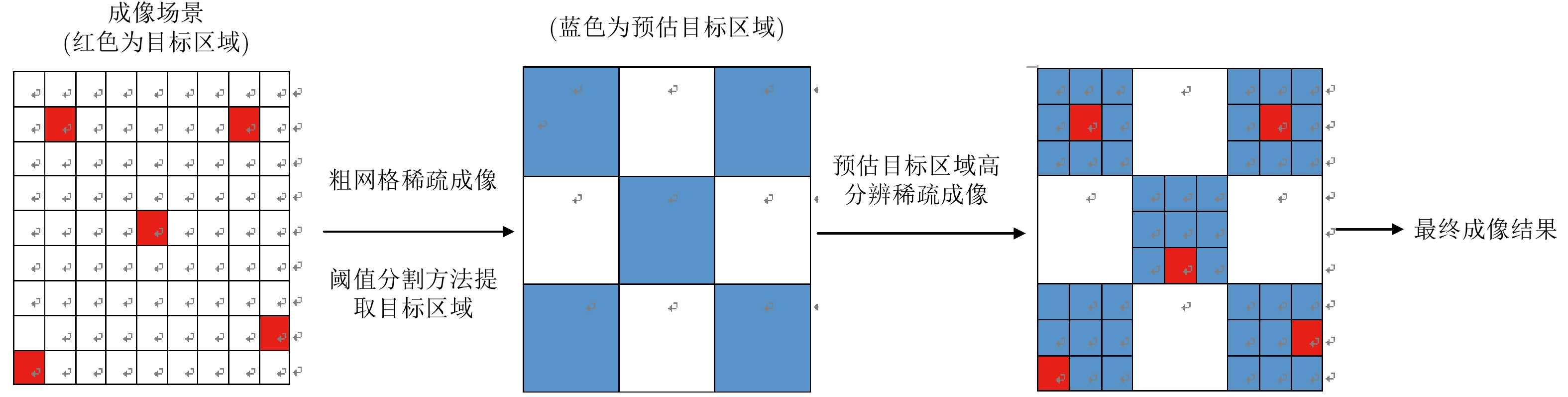
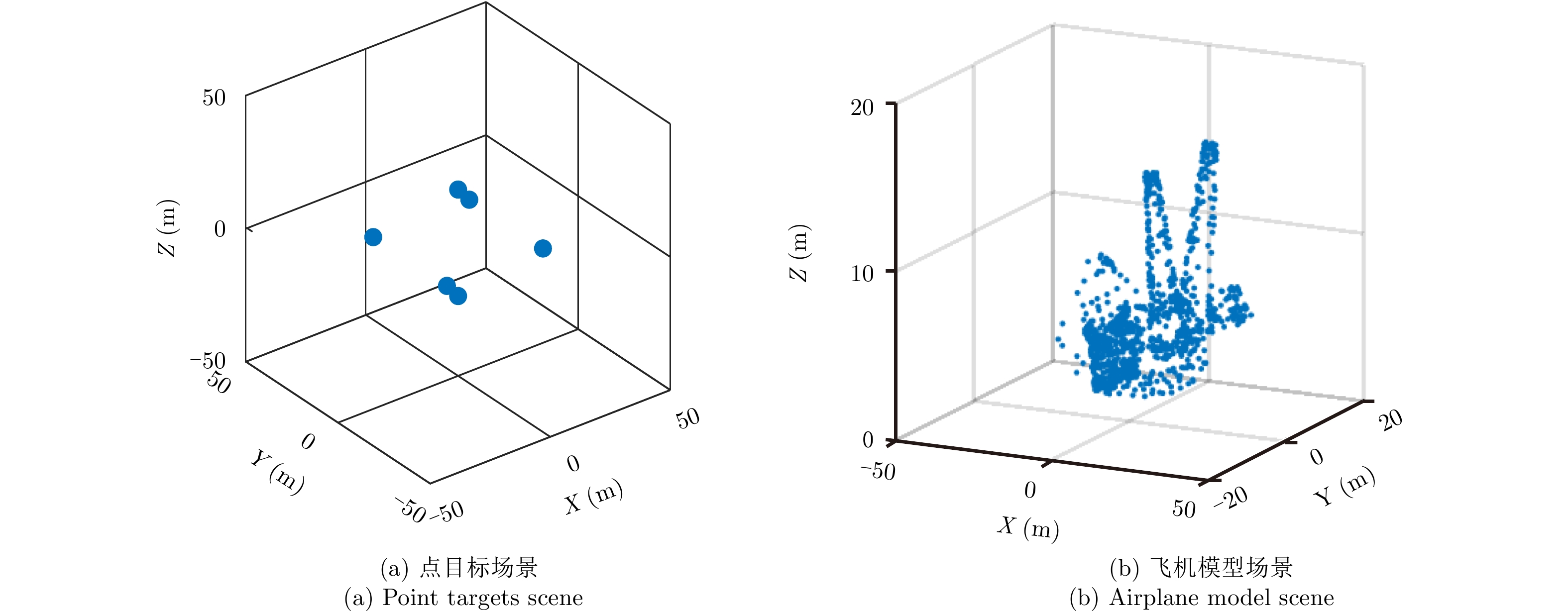
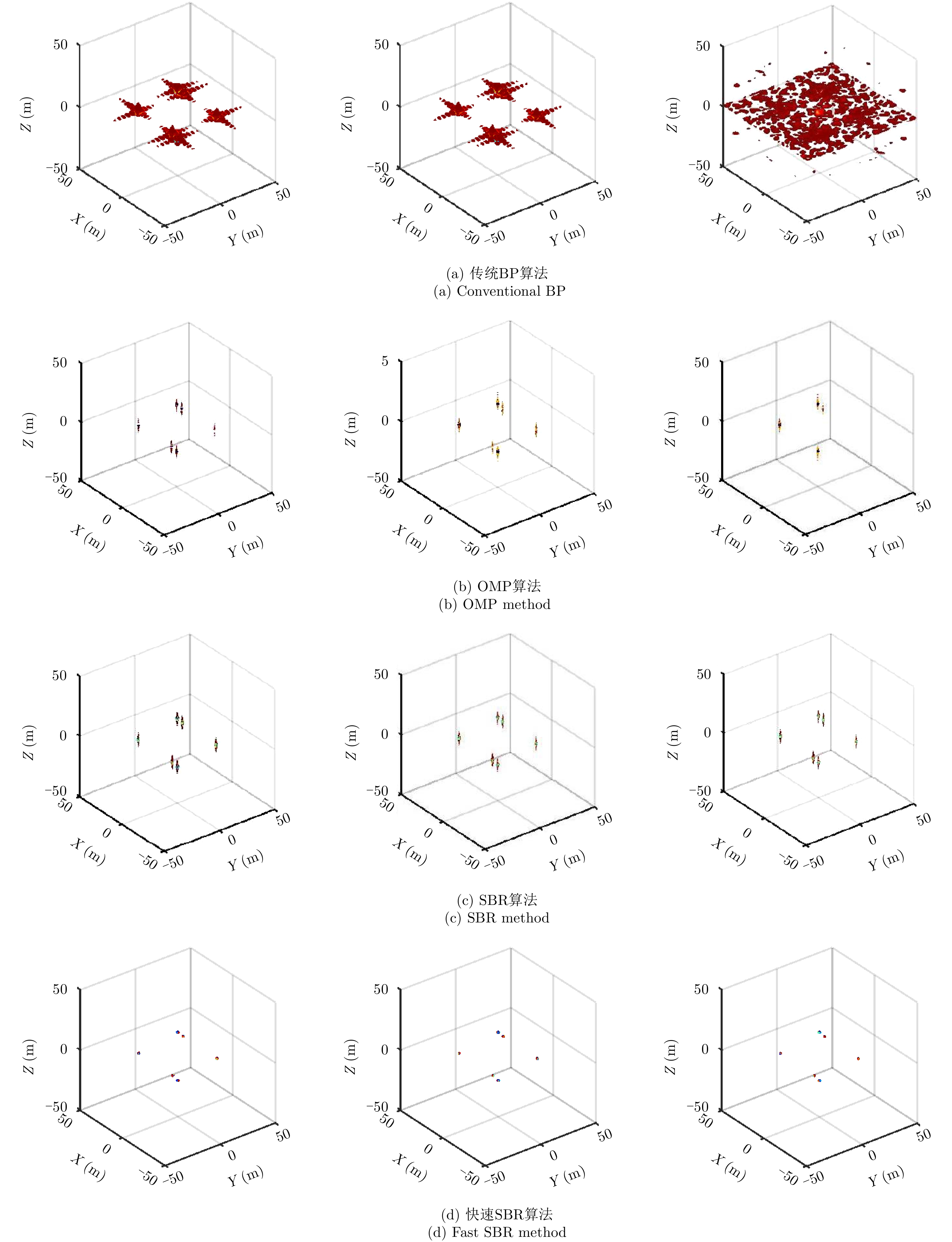
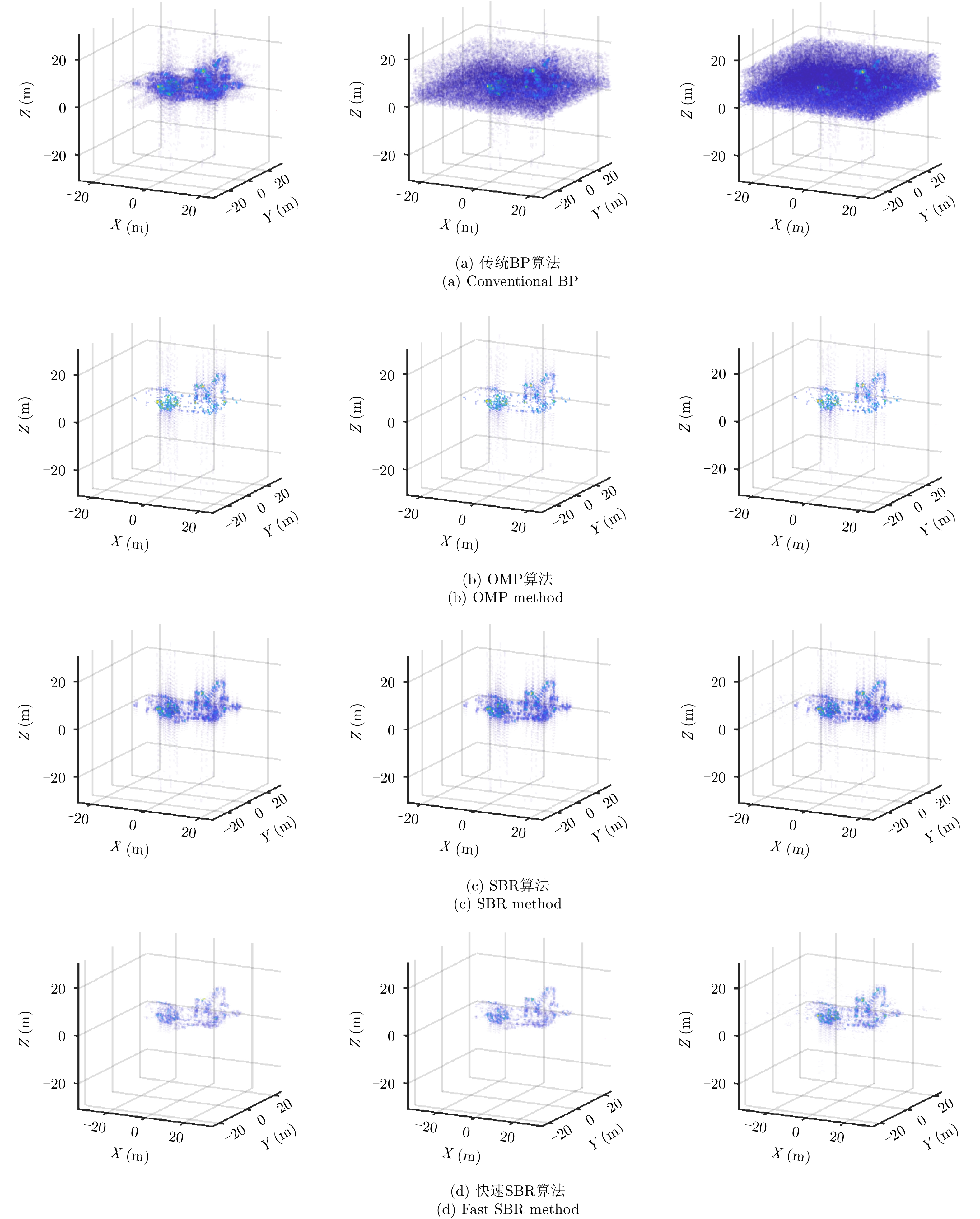
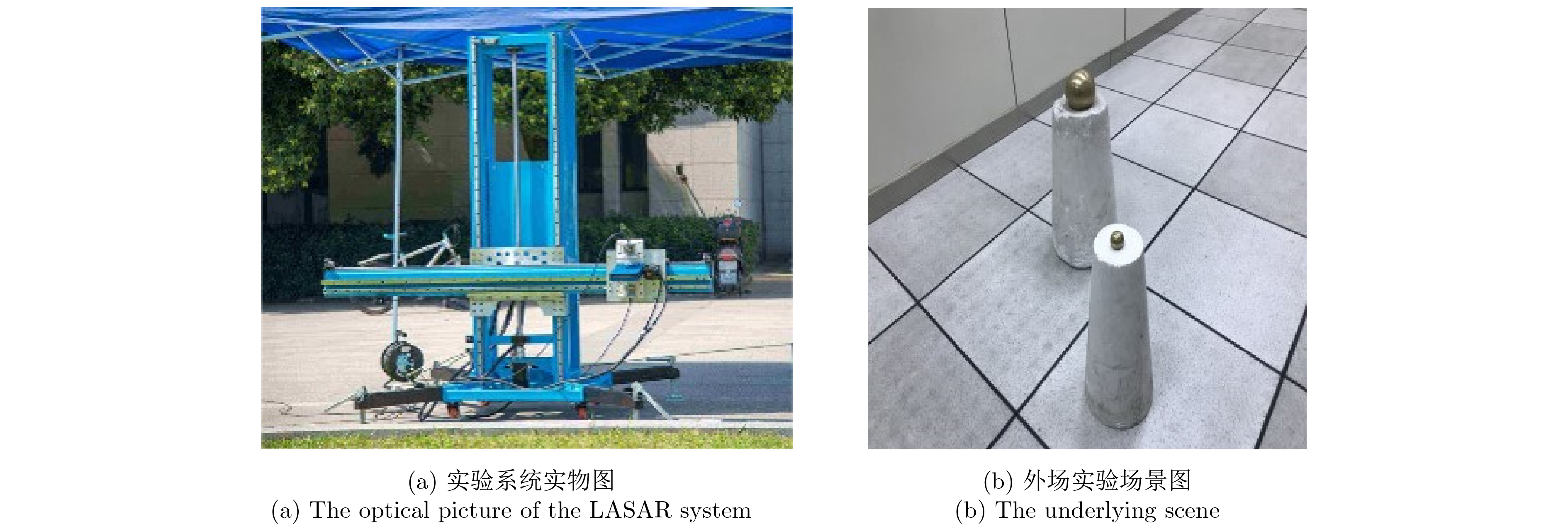
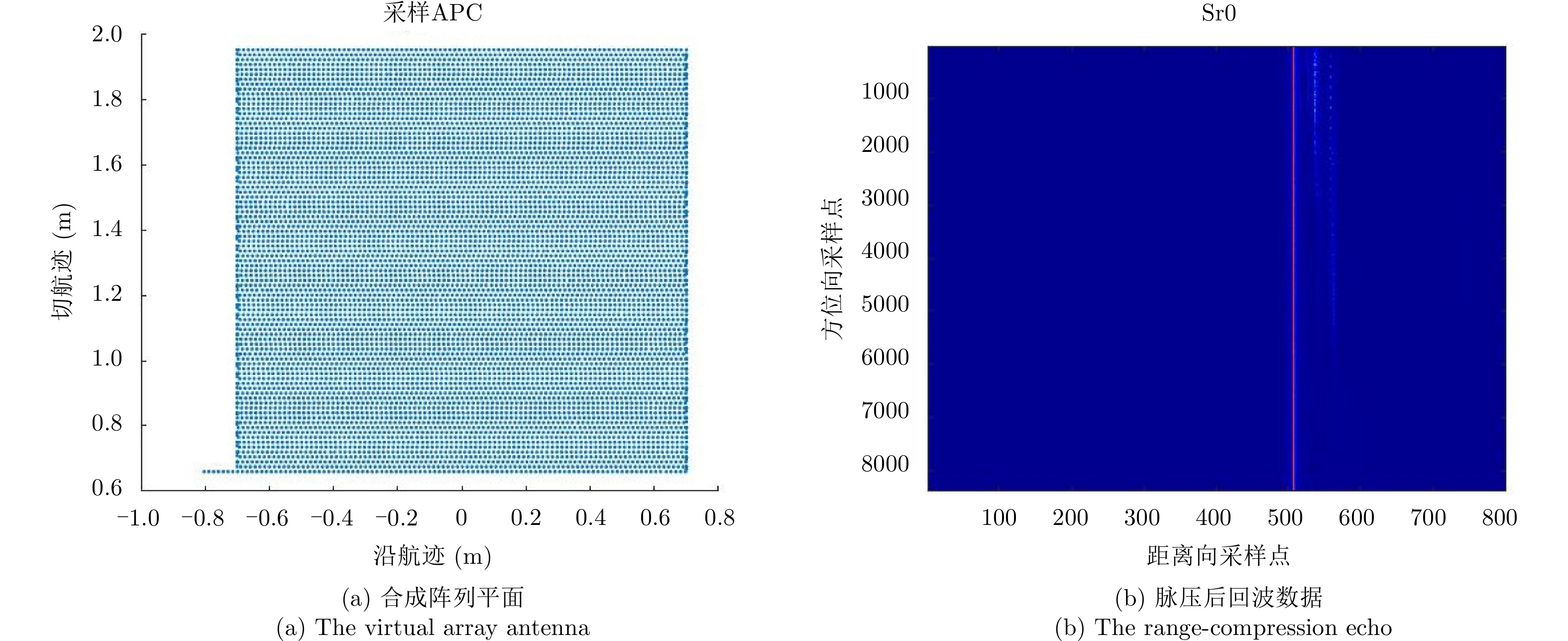
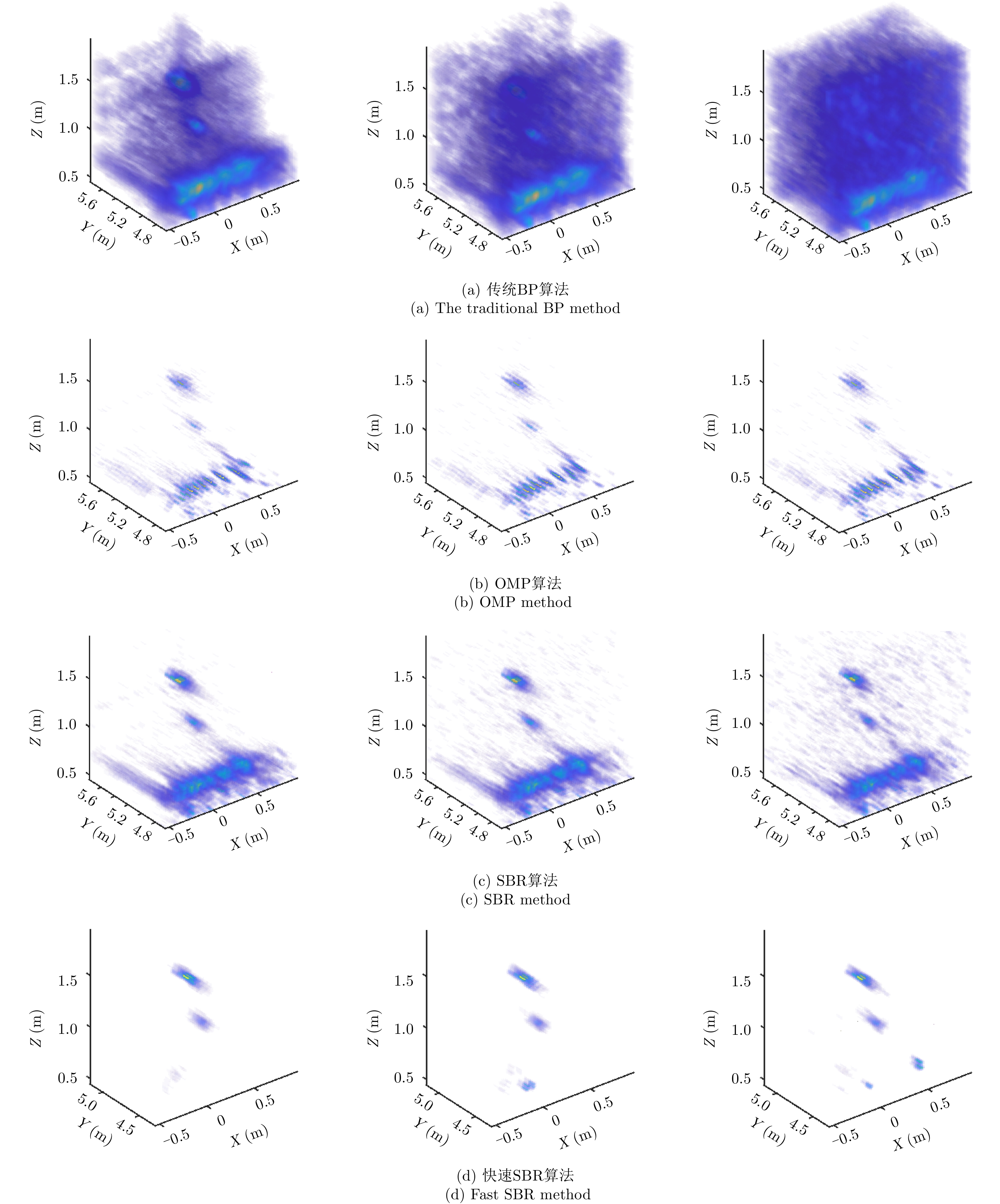
阵列合成孔径雷达(Linear Array Synthetic Aperture Radar, LASAR) 3维成像技术是一种具有重要潜在应用价值的雷达成像新体制,但受线阵天线及平台尺寸限制,传统匹配滤波成像算法难以实现LASAR高分辨3维成像。该文利用LASAR回波信号及观测目标的先验分布特性,提出了一种基于快速稀疏贝叶斯正则化重构的LASAR高分辨3维成像算法。该算法先结合贝叶斯估计准则及最大似然估计原理,构造LASAR目标重构的稀疏贝叶斯最小化代价函数;再利用迭代正则化方法求解联合范数最优化问题实现LASAR稀疏目标高分辨3维成像。另外,针对稀疏贝叶斯正则化成像运算量大的问题,结合位置预测快速成像思路,利用阈值分割算法对稀疏粗成像进行强目标提取,进而提升算法运算效率。仿真数据和实测数据验证了该文算法的有效性。 阵列合成孔径雷达(Linear Array Synthetic Aperture Radar, LASAR) 3维成像技术是一种具有重要潜在应用价值的雷达成像新体制,但受线阵天线及平台尺寸限制,传统匹配滤波成像算法难以实现LASAR高分辨3维成像。该文利用LASAR回波信号及观测目标的先验分布特性,提出了一种基于快速稀疏贝叶斯正则化重构的LASAR高分辨3维成像算法。该算法先结合贝叶斯估计准则及最大似然估计原理,构造LASAR目标重构的稀疏贝叶斯最小化代价函数;再利用迭代正则化方法求解联合范数最优化问题实现LASAR稀疏目标高分辨3维成像。另外,针对稀疏贝叶斯正则化成像运算量大的问题,结合位置预测快速成像思路,利用阈值分割算法对稀疏粗成像进行强目标提取,进而提升算法运算效率。仿真数据和实测数据验证了该文算法的有效性。
阵列合成孔径雷达(Linear Array Synthetic Aperture Radar, LASAR) 3维成像技术是一种具有重要潜在应用价值的雷达成像新体制,但受线阵天线及平台尺寸限制,传统匹配滤波成像算法难以实现LASAR高分辨3维成像。该文利用LASAR回波信号及观测目标的先验分布特性,提出了一种基于快速稀疏贝叶斯正则化重构的LASAR高分辨3维成像算法。该算法先结合贝叶斯估计准则及最大似然估计原理,构造LASAR目标重构的稀疏贝叶斯最小化代价函数;再利用迭代正则化方法求解联合范数最优化问题实现LASAR稀疏目标高分辨3维成像。另外,针对稀疏贝叶斯正则化成像运算量大的问题,结合位置预测快速成像思路,利用阈值分割算法对稀疏粗成像进行强目标提取,进而提升算法运算效率。仿真数据和实测数据验证了该文算法的有效性。 阵列合成孔径雷达(Linear Array Synthetic Aperture Radar, LASAR) 3维成像技术是一种具有重要潜在应用价值的雷达成像新体制,但受线阵天线及平台尺寸限制,传统匹配滤波成像算法难以实现LASAR高分辨3维成像。该文利用LASAR回波信号及观测目标的先验分布特性,提出了一种基于快速稀疏贝叶斯正则化重构的LASAR高分辨3维成像算法。该算法先结合贝叶斯估计准则及最大似然估计原理,构造LASAR目标重构的稀疏贝叶斯最小化代价函数;再利用迭代正则化方法求解联合范数最优化问题实现LASAR稀疏目标高分辨3维成像。另外,针对稀疏贝叶斯正则化成像运算量大的问题,结合位置预测快速成像思路,利用阈值分割算法对稀疏粗成像进行强目标提取,进而提升算法运算效率。仿真数据和实测数据验证了该文算法的有效性。



2018, 7(6): 717-729.
摘要:
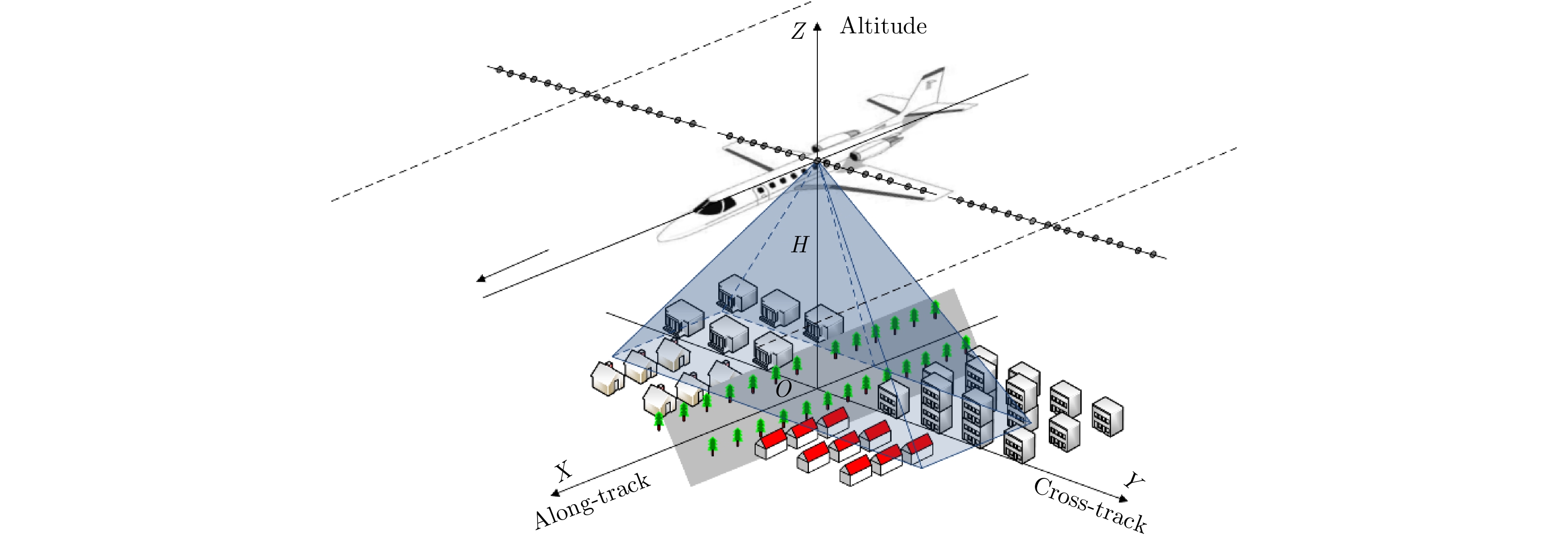
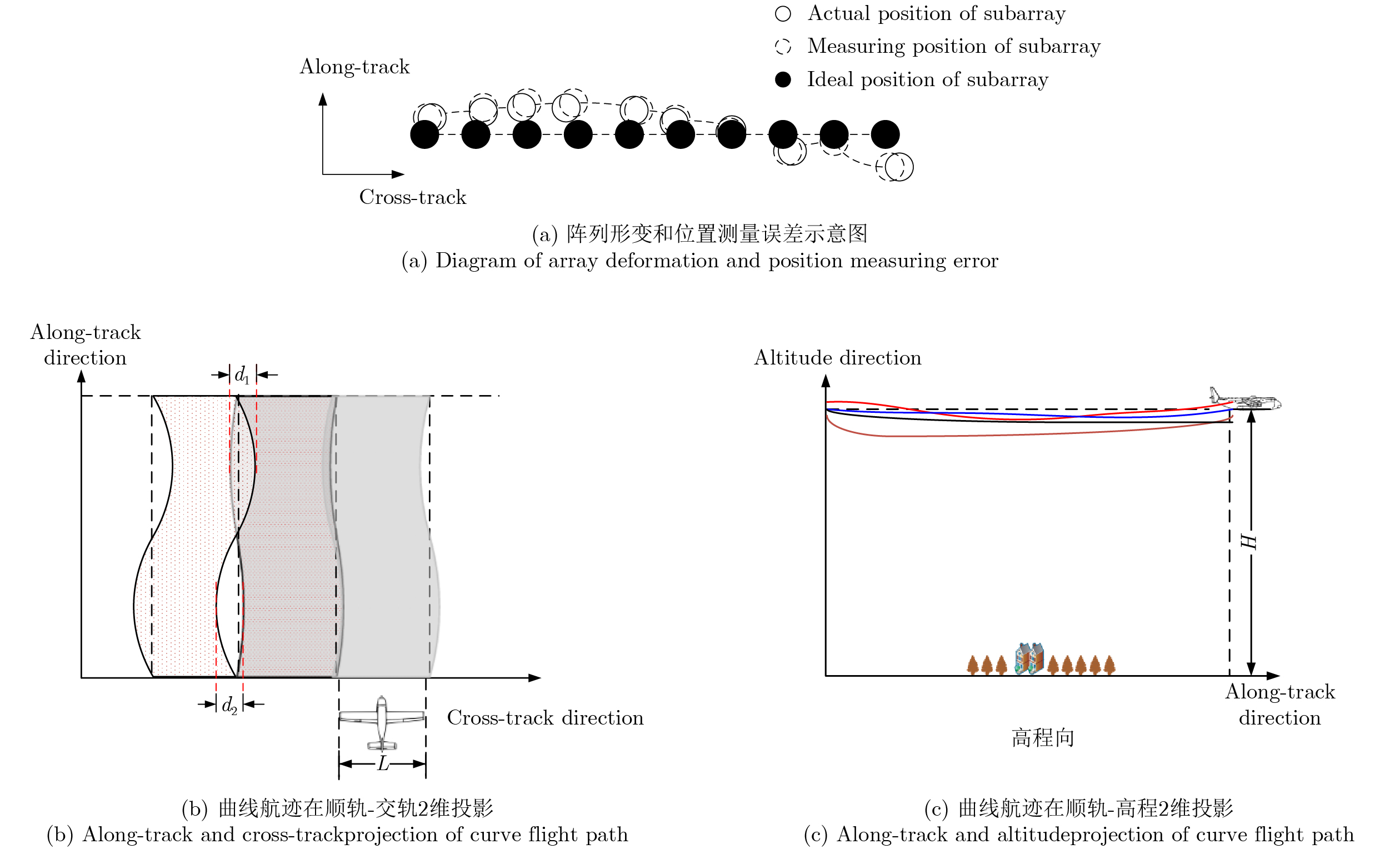
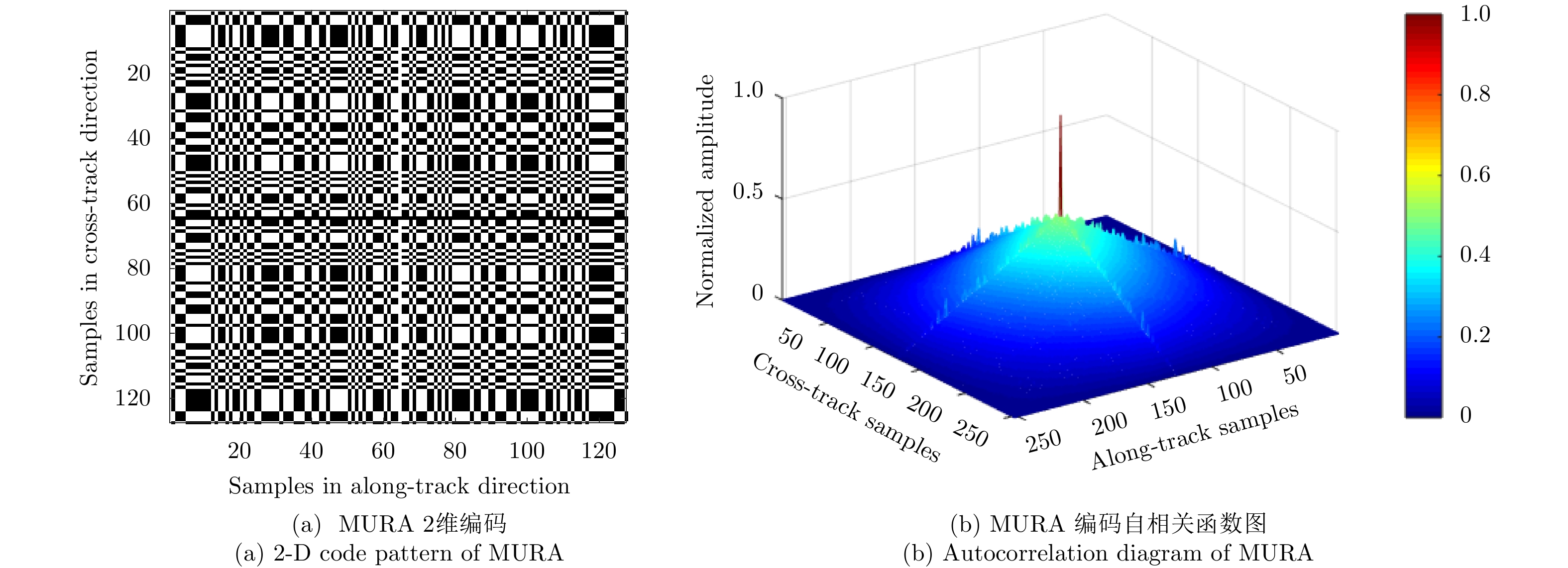
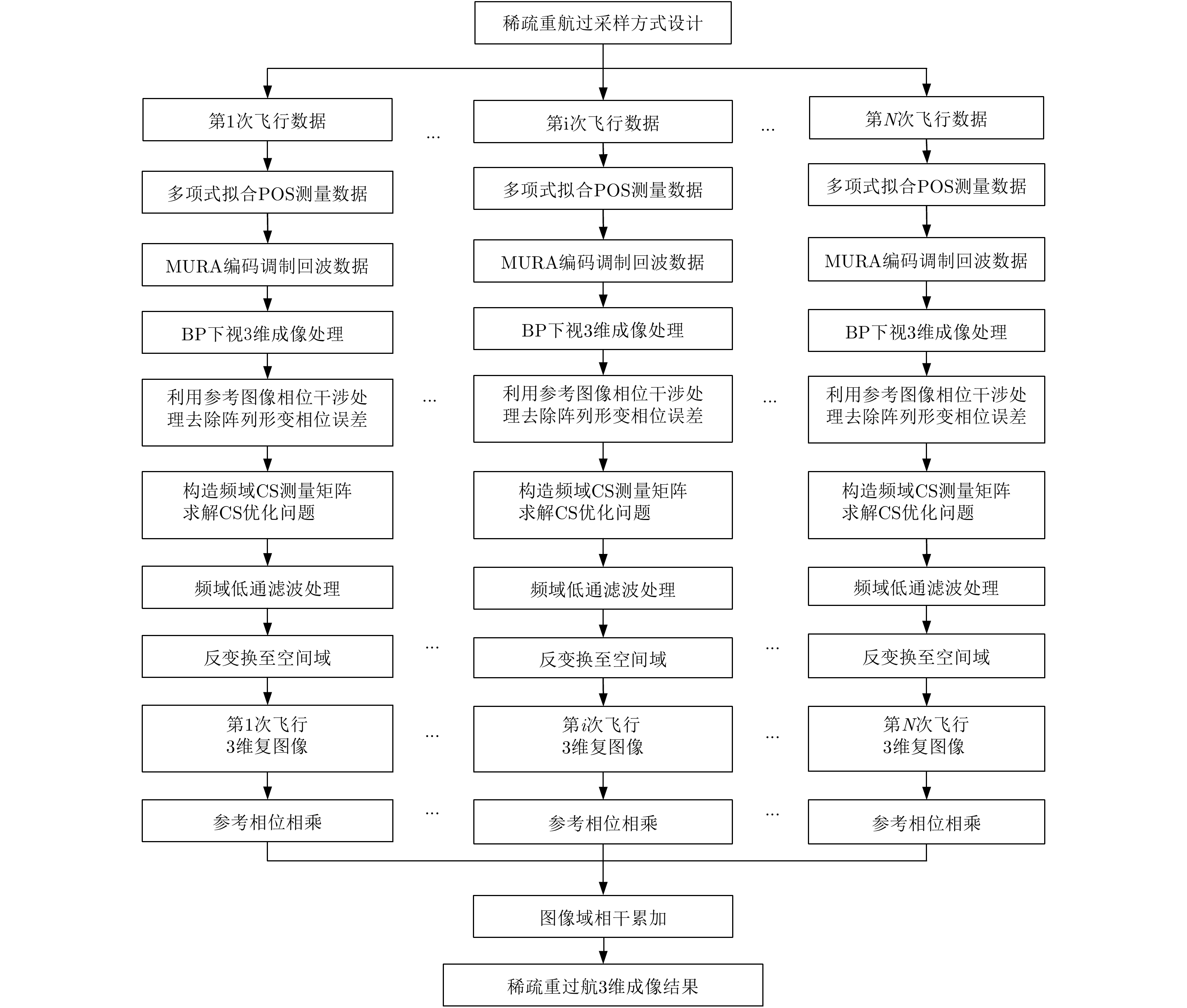
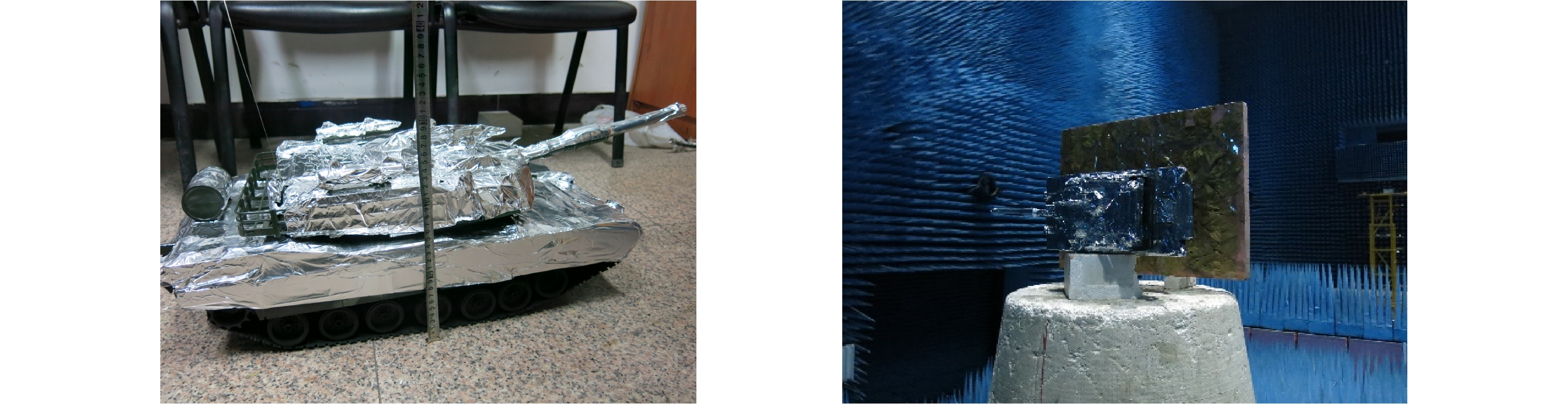
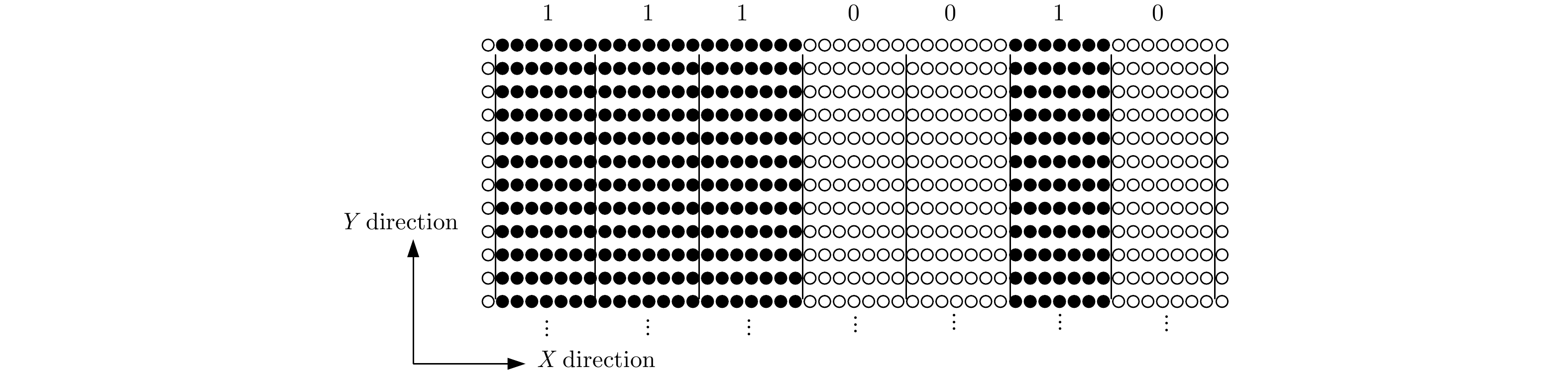
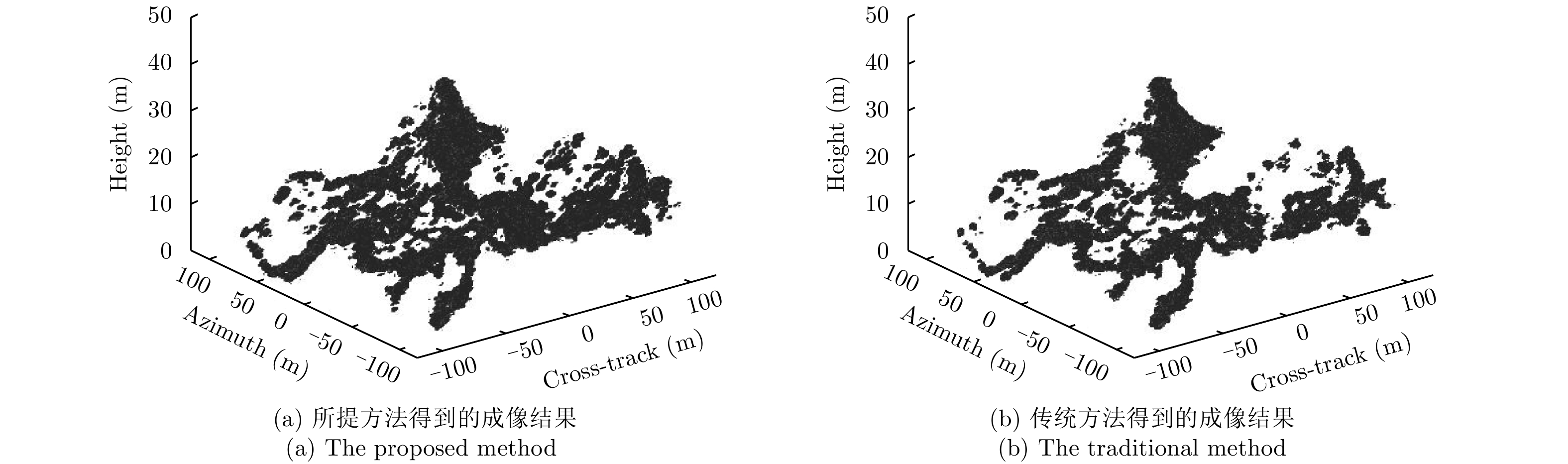
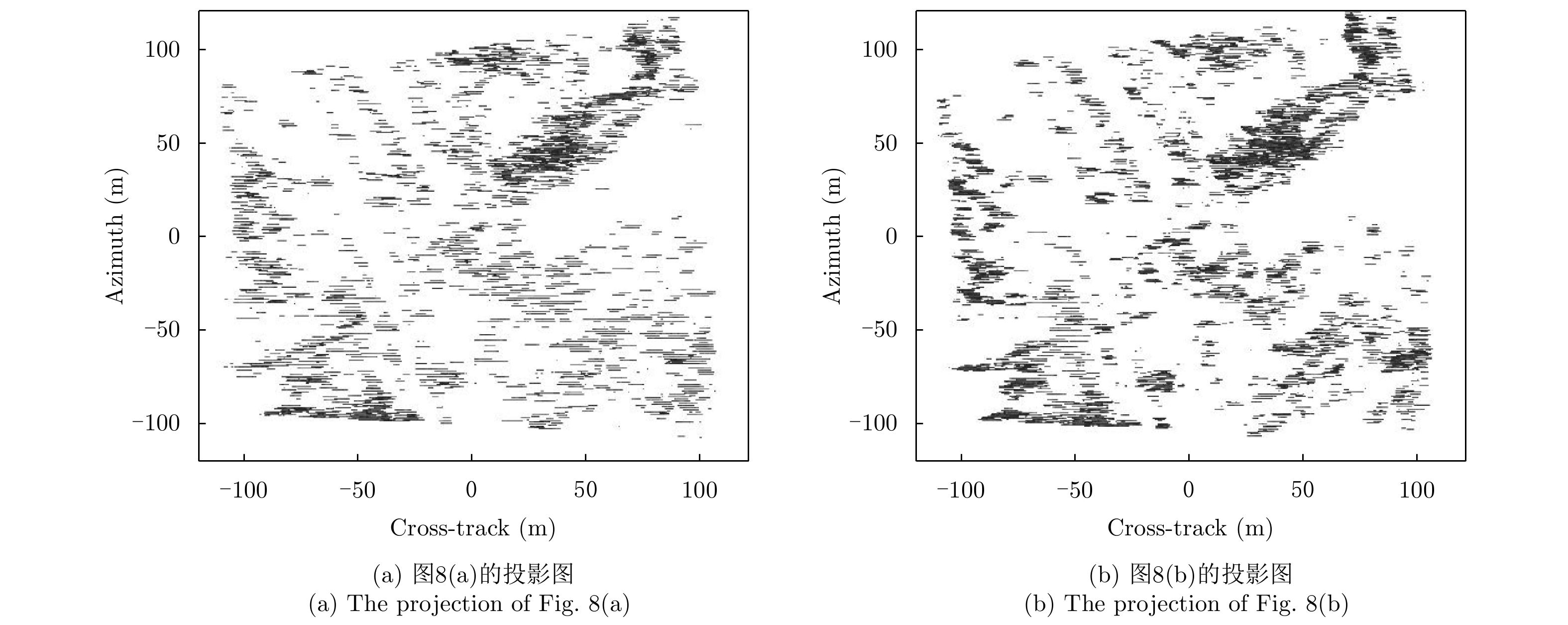
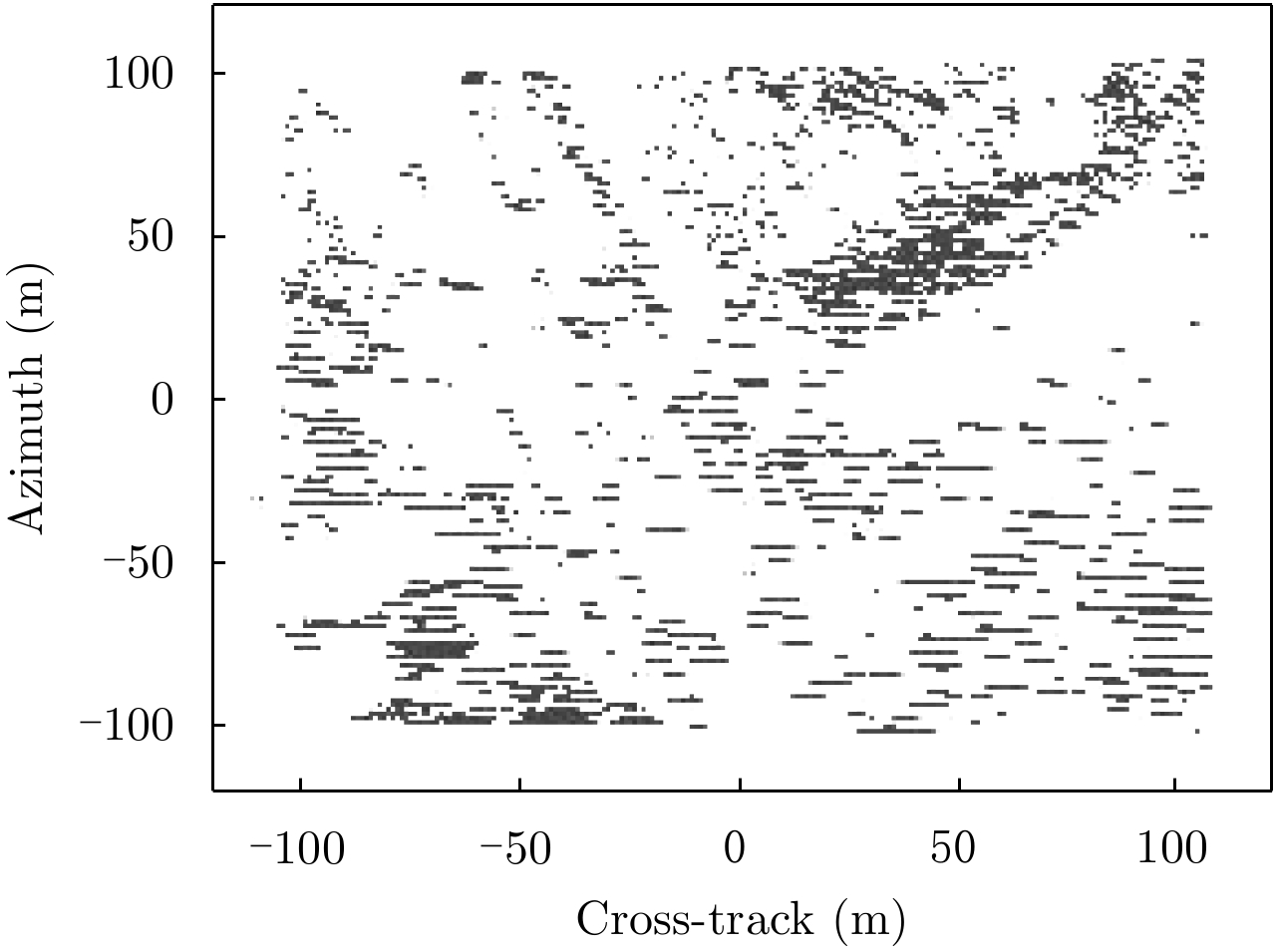
该文针对机载交轨阵列SAR下视3维成像模型,采用以巴克码伪随机序列为准则的稀疏重航过采样方式,利用较少飞行次数提高交轨向分辨率。针对重航过采样方式存在的运动误差,利用修正均匀冗余阵列(Modified Uniformly Redundant Arrays, MURA)编码空间调制和3维后向投影(Back Projection, BP)算法获得各航过3维复图像对,基于干涉处理和频域压缩感知(Compressed Sensing, CS)等效实现各航过阵列形变误差补偿。将MURA反码对应回波形成的3维复图像相位作为参考,对各单航过复图像进行相位补偿,以恢复各航过间复图像相位关系。根据单航过阵列SAR3维复图像具备频域稀疏的性质,对各个复图像相干累加,实现稀疏重航过阵列SAR高分辨率下视3维成像。仿真和暗室试验数据处理结果验证了方法的有效性。 该文针对机载交轨阵列SAR下视3维成像模型,采用以巴克码伪随机序列为准则的稀疏重航过采样方式,利用较少飞行次数提高交轨向分辨率。针对重航过采样方式存在的运动误差,利用修正均匀冗余阵列(Modified Uniformly Redundant Arrays, MURA)编码空间调制和3维后向投影(Back Projection, BP)算法获得各航过3维复图像对,基于干涉处理和频域压缩感知(Compressed Sensing, CS)等效实现各航过阵列形变误差补偿。将MURA反码对应回波形成的3维复图像相位作为参考,对各单航过复图像进行相位补偿,以恢复各航过间复图像相位关系。根据单航过阵列SAR3维复图像具备频域稀疏的性质,对各个复图像相干累加,实现稀疏重航过阵列SAR高分辨率下视3维成像。仿真和暗室试验数据处理结果验证了方法的有效性。
该文针对机载交轨阵列SAR下视3维成像模型,采用以巴克码伪随机序列为准则的稀疏重航过采样方式,利用较少飞行次数提高交轨向分辨率。针对重航过采样方式存在的运动误差,利用修正均匀冗余阵列(Modified Uniformly Redundant Arrays, MURA)编码空间调制和3维后向投影(Back Projection, BP)算法获得各航过3维复图像对,基于干涉处理和频域压缩感知(Compressed Sensing, CS)等效实现各航过阵列形变误差补偿。将MURA反码对应回波形成的3维复图像相位作为参考,对各单航过复图像进行相位补偿,以恢复各航过间复图像相位关系。根据单航过阵列SAR3维复图像具备频域稀疏的性质,对各个复图像相干累加,实现稀疏重航过阵列SAR高分辨率下视3维成像。仿真和暗室试验数据处理结果验证了方法的有效性。 该文针对机载交轨阵列SAR下视3维成像模型,采用以巴克码伪随机序列为准则的稀疏重航过采样方式,利用较少飞行次数提高交轨向分辨率。针对重航过采样方式存在的运动误差,利用修正均匀冗余阵列(Modified Uniformly Redundant Arrays, MURA)编码空间调制和3维后向投影(Back Projection, BP)算法获得各航过3维复图像对,基于干涉处理和频域压缩感知(Compressed Sensing, CS)等效实现各航过阵列形变误差补偿。将MURA反码对应回波形成的3维复图像相位作为参考,对各单航过复图像进行相位补偿,以恢复各航过间复图像相位关系。根据单航过阵列SAR3维复图像具备频域稀疏的性质,对各个复图像相干累加,实现稀疏重航过阵列SAR高分辨率下视3维成像。仿真和暗室试验数据处理结果验证了方法的有效性。






2018, 7(6): 730-739.
摘要:
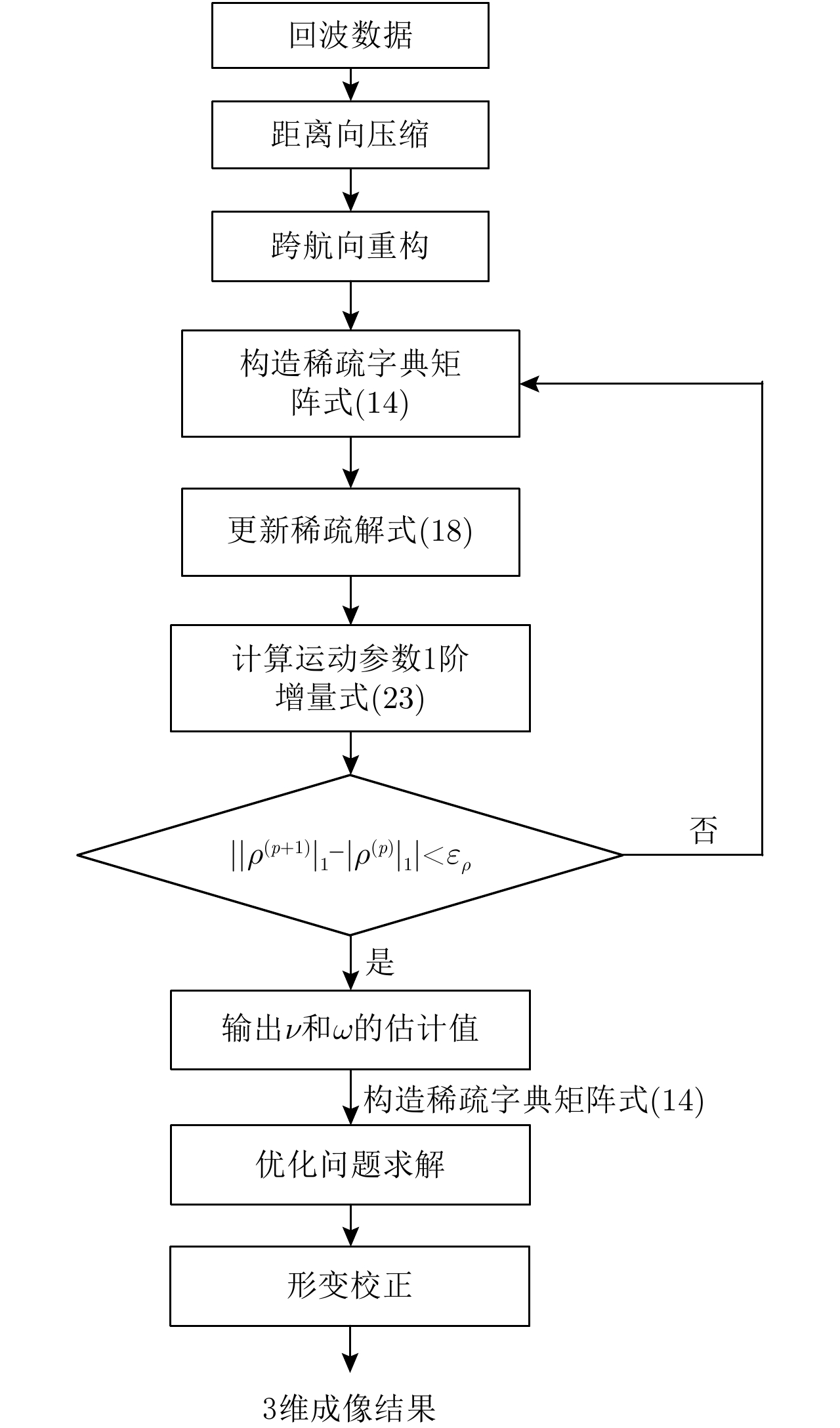
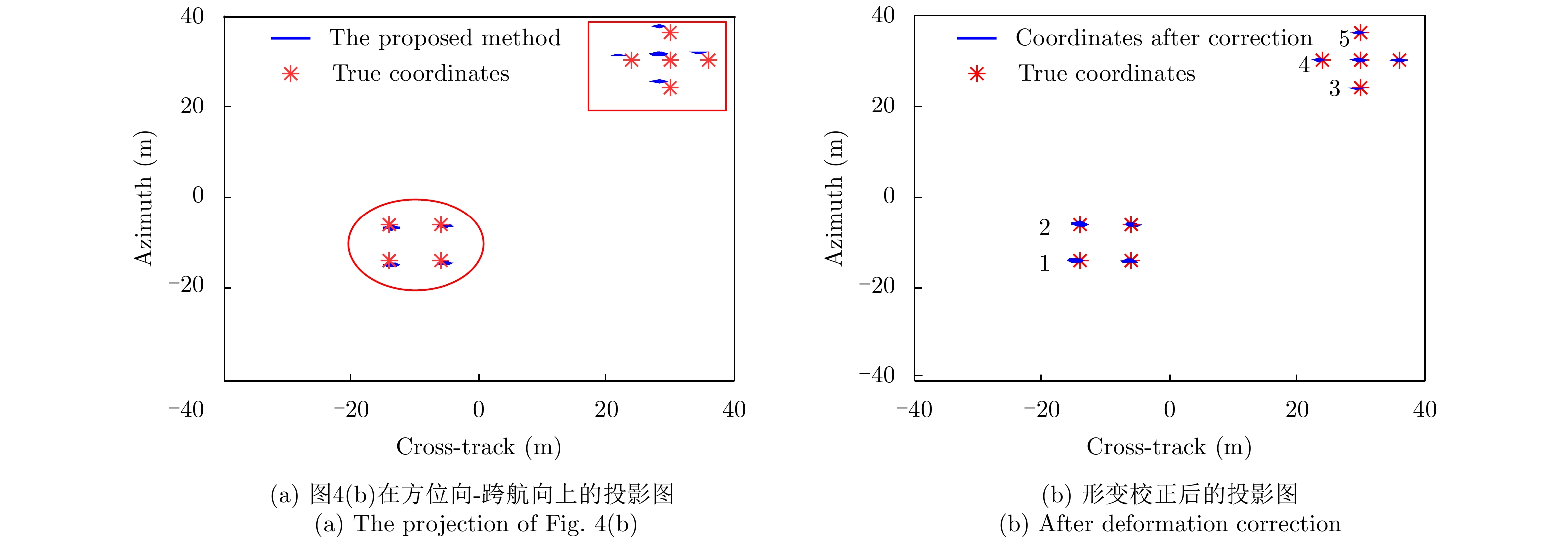
当载机存在偏航角速度时,载机航线会偏离理想航线,对稀疏阵列下视3维合成孔径雷达(DLSLA 3D SAR)成像产生影响。该文建立了载机在飞行过程中存在偏航角速度下的DLSLA 3D SAR成像模型,通过理论推导得到了信号的多普勒调频率表达式,多普勒调频率与目标被调制后的跨航向坐标有关,而与被调制后的方位向坐标无关。进一步,完成跨航向信号处理之后,在平台的速度和偏航角速度不准的情况下,利用参数化稀疏表征方法实现了平台的速度和偏航角速度的估计,并完成了方位向稀疏场景的重构,最后提出了一种形变校正方法。仿真实验验证了该算法的有效性。 当载机存在偏航角速度时,载机航线会偏离理想航线,对稀疏阵列下视3维合成孔径雷达(DLSLA 3D SAR)成像产生影响。该文建立了载机在飞行过程中存在偏航角速度下的DLSLA 3D SAR成像模型,通过理论推导得到了信号的多普勒调频率表达式,多普勒调频率与目标被调制后的跨航向坐标有关,而与被调制后的方位向坐标无关。进一步,完成跨航向信号处理之后,在平台的速度和偏航角速度不准的情况下,利用参数化稀疏表征方法实现了平台的速度和偏航角速度的估计,并完成了方位向稀疏场景的重构,最后提出了一种形变校正方法。仿真实验验证了该算法的有效性。
当载机存在偏航角速度时,载机航线会偏离理想航线,对稀疏阵列下视3维合成孔径雷达(DLSLA 3D SAR)成像产生影响。该文建立了载机在飞行过程中存在偏航角速度下的DLSLA 3D SAR成像模型,通过理论推导得到了信号的多普勒调频率表达式,多普勒调频率与目标被调制后的跨航向坐标有关,而与被调制后的方位向坐标无关。进一步,完成跨航向信号处理之后,在平台的速度和偏航角速度不准的情况下,利用参数化稀疏表征方法实现了平台的速度和偏航角速度的估计,并完成了方位向稀疏场景的重构,最后提出了一种形变校正方法。仿真实验验证了该算法的有效性。 当载机存在偏航角速度时,载机航线会偏离理想航线,对稀疏阵列下视3维合成孔径雷达(DLSLA 3D SAR)成像产生影响。该文建立了载机在飞行过程中存在偏航角速度下的DLSLA 3D SAR成像模型,通过理论推导得到了信号的多普勒调频率表达式,多普勒调频率与目标被调制后的跨航向坐标有关,而与被调制后的方位向坐标无关。进一步,完成跨航向信号处理之后,在平台的速度和偏航角速度不准的情况下,利用参数化稀疏表征方法实现了平台的速度和偏航角速度的估计,并完成了方位向稀疏场景的重构,最后提出了一种形变校正方法。仿真实验验证了该算法的有效性。





2018, 7(6): 740-749.
摘要:
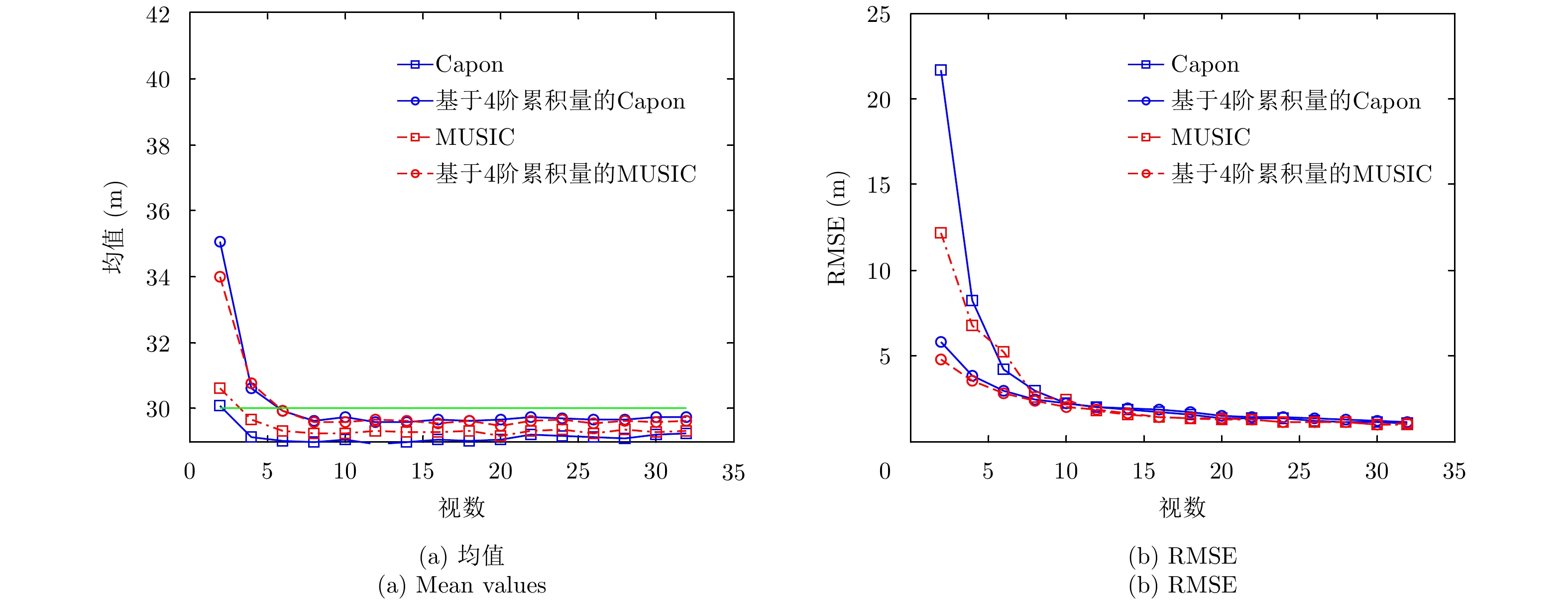
叠掩问题是SAR成像处理的一个技术难点,在机载多基线SAR系统中,传统的谱估计解叠掩方法受到非均匀基线和基线数目少的限制,使得其在解叠掩过程中的散射点高度向测量误差大、分辨性能差。针对以上问题,该文将4阶累积量统计特性用于传统的谱估计解叠掩方法中,利用4阶累积量的盲高斯性和非均匀阵列的虚拟阵列扩展性能,结合传统的Capon, MUSIC谱估计方法,能在有效去除高斯噪声的同时,提高叠掩处各散射点的高度向测量精度及分辨率。仿真和实测数据实验证明了该文方法的有效性。 叠掩问题是SAR成像处理的一个技术难点,在机载多基线SAR系统中,传统的谱估计解叠掩方法受到非均匀基线和基线数目少的限制,使得其在解叠掩过程中的散射点高度向测量误差大、分辨性能差。针对以上问题,该文将4阶累积量统计特性用于传统的谱估计解叠掩方法中,利用4阶累积量的盲高斯性和非均匀阵列的虚拟阵列扩展性能,结合传统的Capon, MUSIC谱估计方法,能在有效去除高斯噪声的同时,提高叠掩处各散射点的高度向测量精度及分辨率。仿真和实测数据实验证明了该文方法的有效性。
叠掩问题是SAR成像处理的一个技术难点,在机载多基线SAR系统中,传统的谱估计解叠掩方法受到非均匀基线和基线数目少的限制,使得其在解叠掩过程中的散射点高度向测量误差大、分辨性能差。针对以上问题,该文将4阶累积量统计特性用于传统的谱估计解叠掩方法中,利用4阶累积量的盲高斯性和非均匀阵列的虚拟阵列扩展性能,结合传统的Capon, MUSIC谱估计方法,能在有效去除高斯噪声的同时,提高叠掩处各散射点的高度向测量精度及分辨率。仿真和实测数据实验证明了该文方法的有效性。 叠掩问题是SAR成像处理的一个技术难点,在机载多基线SAR系统中,传统的谱估计解叠掩方法受到非均匀基线和基线数目少的限制,使得其在解叠掩过程中的散射点高度向测量误差大、分辨性能差。针对以上问题,该文将4阶累积量统计特性用于传统的谱估计解叠掩方法中,利用4阶累积量的盲高斯性和非均匀阵列的虚拟阵列扩展性能,结合传统的Capon, MUSIC谱估计方法,能在有效去除高斯噪声的同时,提高叠掩处各散射点的高度向测量精度及分辨率。仿真和实测数据实验证明了该文方法的有效性。








2018, 7(6): 750-757.
摘要:
针对干涉合成孔径雷达(InSAR)成像,该文提出了一种通道联合结构化稀疏的贝叶斯成像算法,可实现图像稀疏特征化增强,以提升干涉相位噪声滤波和相干斑抑制性能。基于贝叶斯准则,利用多层级统计模型建立稀疏成像模型,结构化稀疏表示InSAR图像。在稀疏成像求解中,利用最大期望(EM)算法进行图像重构和多层级统计参数估计。由于能够联合利用通道稀疏统计特性,所提算法能够有效提升InSAR幅度和相位噪声滤波性能。最后,通过实验分析进一步验证该文算法的有效性。 针对干涉合成孔径雷达(InSAR)成像,该文提出了一种通道联合结构化稀疏的贝叶斯成像算法,可实现图像稀疏特征化增强,以提升干涉相位噪声滤波和相干斑抑制性能。基于贝叶斯准则,利用多层级统计模型建立稀疏成像模型,结构化稀疏表示InSAR图像。在稀疏成像求解中,利用最大期望(EM)算法进行图像重构和多层级统计参数估计。由于能够联合利用通道稀疏统计特性,所提算法能够有效提升InSAR幅度和相位噪声滤波性能。最后,通过实验分析进一步验证该文算法的有效性。
针对干涉合成孔径雷达(InSAR)成像,该文提出了一种通道联合结构化稀疏的贝叶斯成像算法,可实现图像稀疏特征化增强,以提升干涉相位噪声滤波和相干斑抑制性能。基于贝叶斯准则,利用多层级统计模型建立稀疏成像模型,结构化稀疏表示InSAR图像。在稀疏成像求解中,利用最大期望(EM)算法进行图像重构和多层级统计参数估计。由于能够联合利用通道稀疏统计特性,所提算法能够有效提升InSAR幅度和相位噪声滤波性能。最后,通过实验分析进一步验证该文算法的有效性。 针对干涉合成孔径雷达(InSAR)成像,该文提出了一种通道联合结构化稀疏的贝叶斯成像算法,可实现图像稀疏特征化增强,以提升干涉相位噪声滤波和相干斑抑制性能。基于贝叶斯准则,利用多层级统计模型建立稀疏成像模型,结构化稀疏表示InSAR图像。在稀疏成像求解中,利用最大期望(EM)算法进行图像重构和多层级统计参数估计。由于能够联合利用通道稀疏统计特性,所提算法能够有效提升InSAR幅度和相位噪声滤波性能。最后,通过实验分析进一步验证该文算法的有效性。





2018, 7(6): 758-769.
摘要:
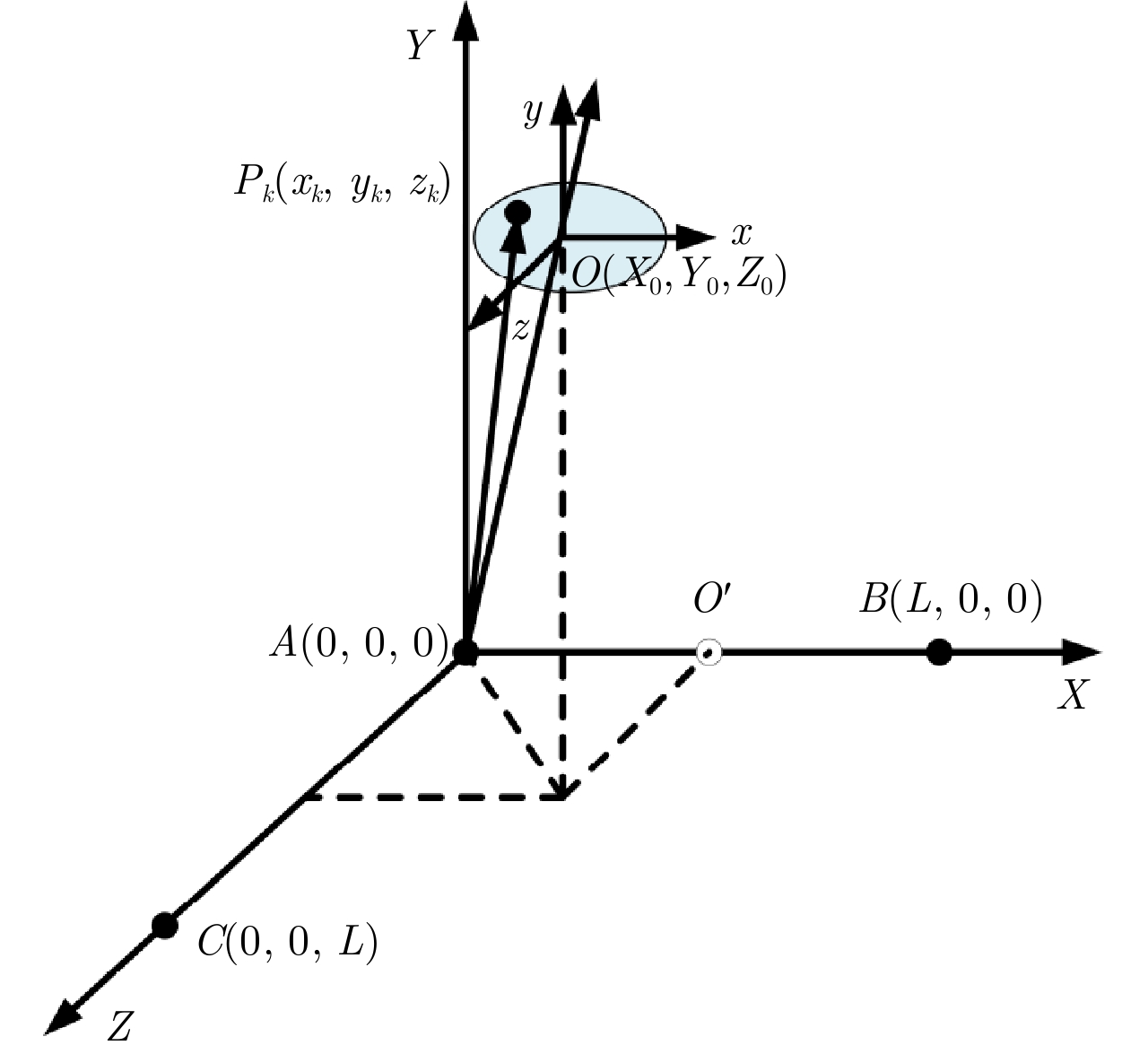
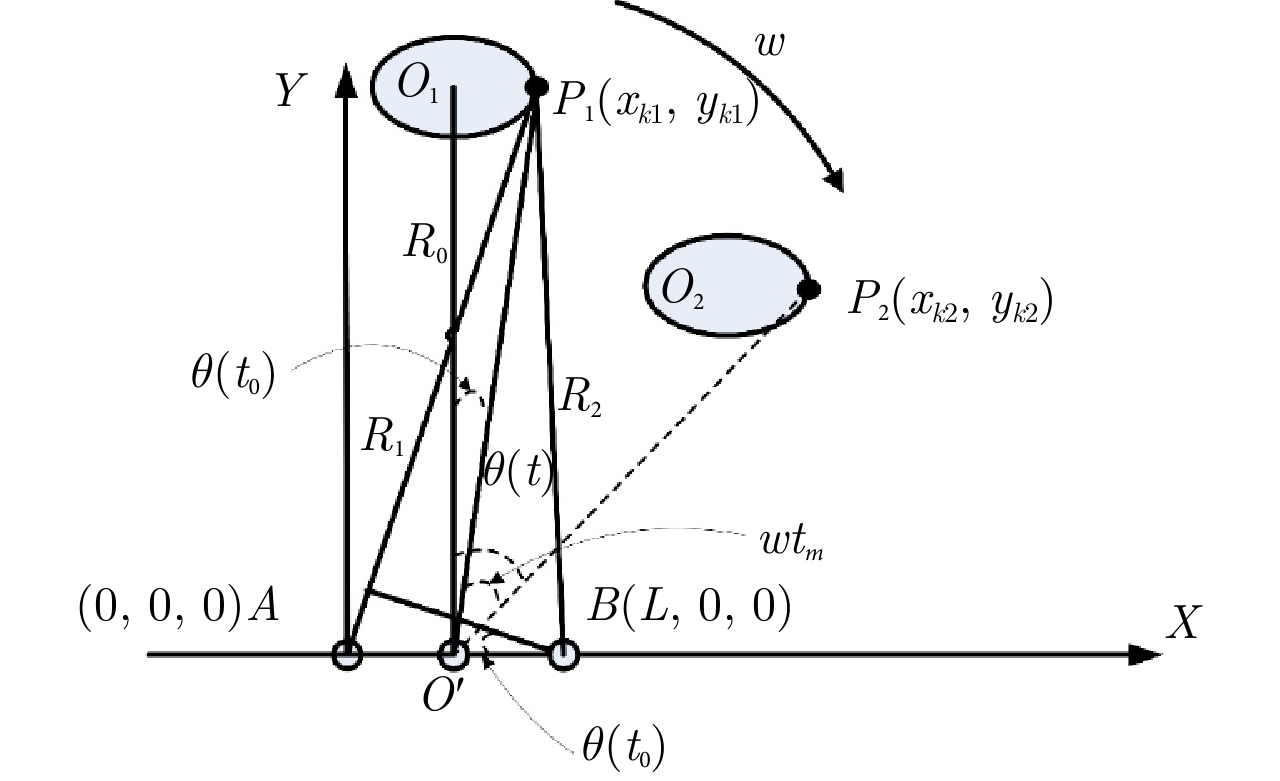
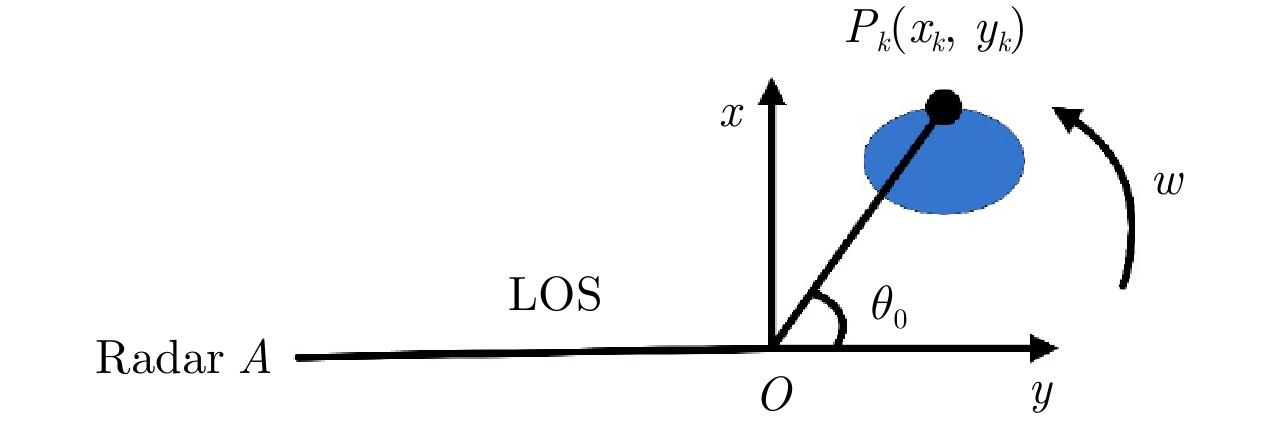
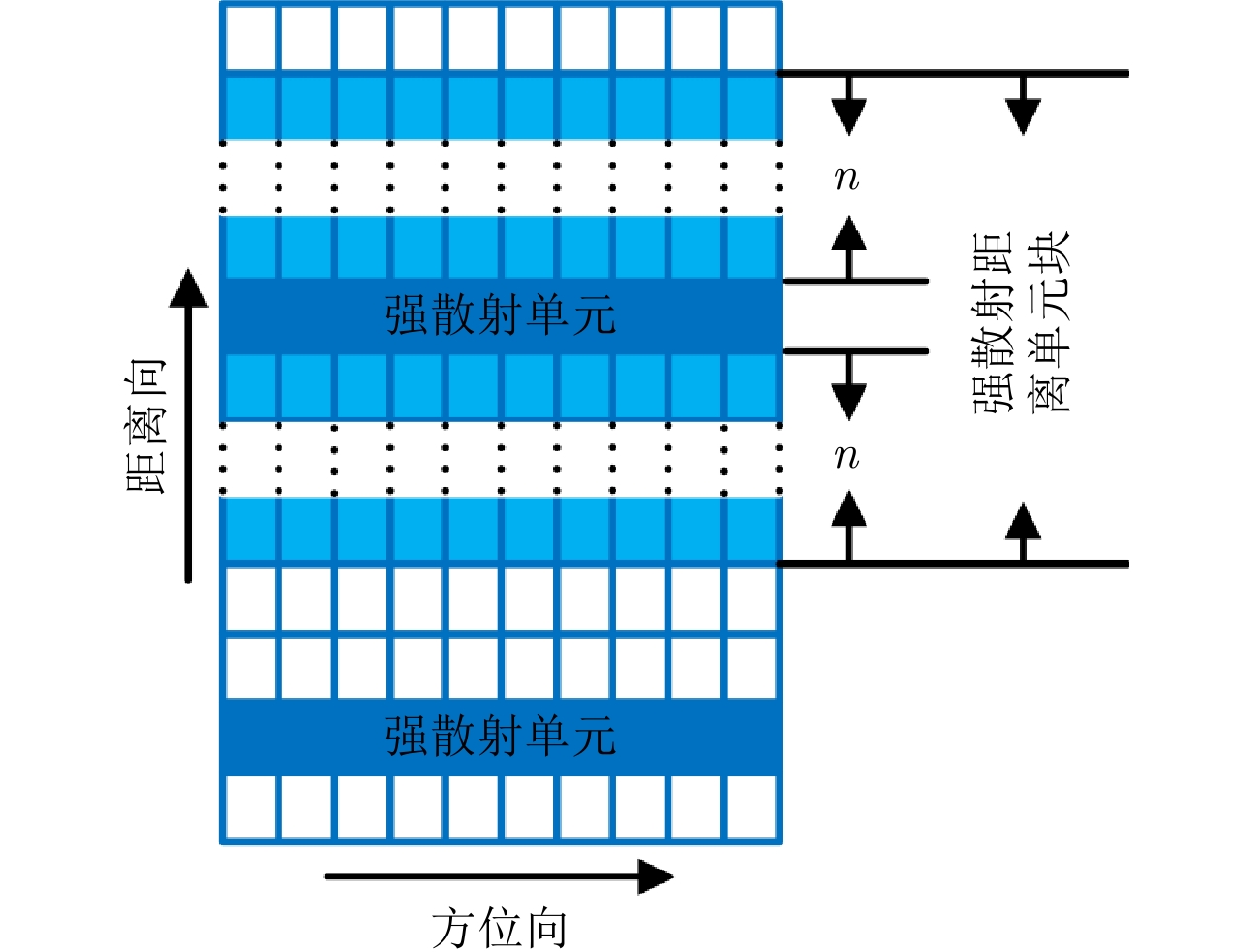
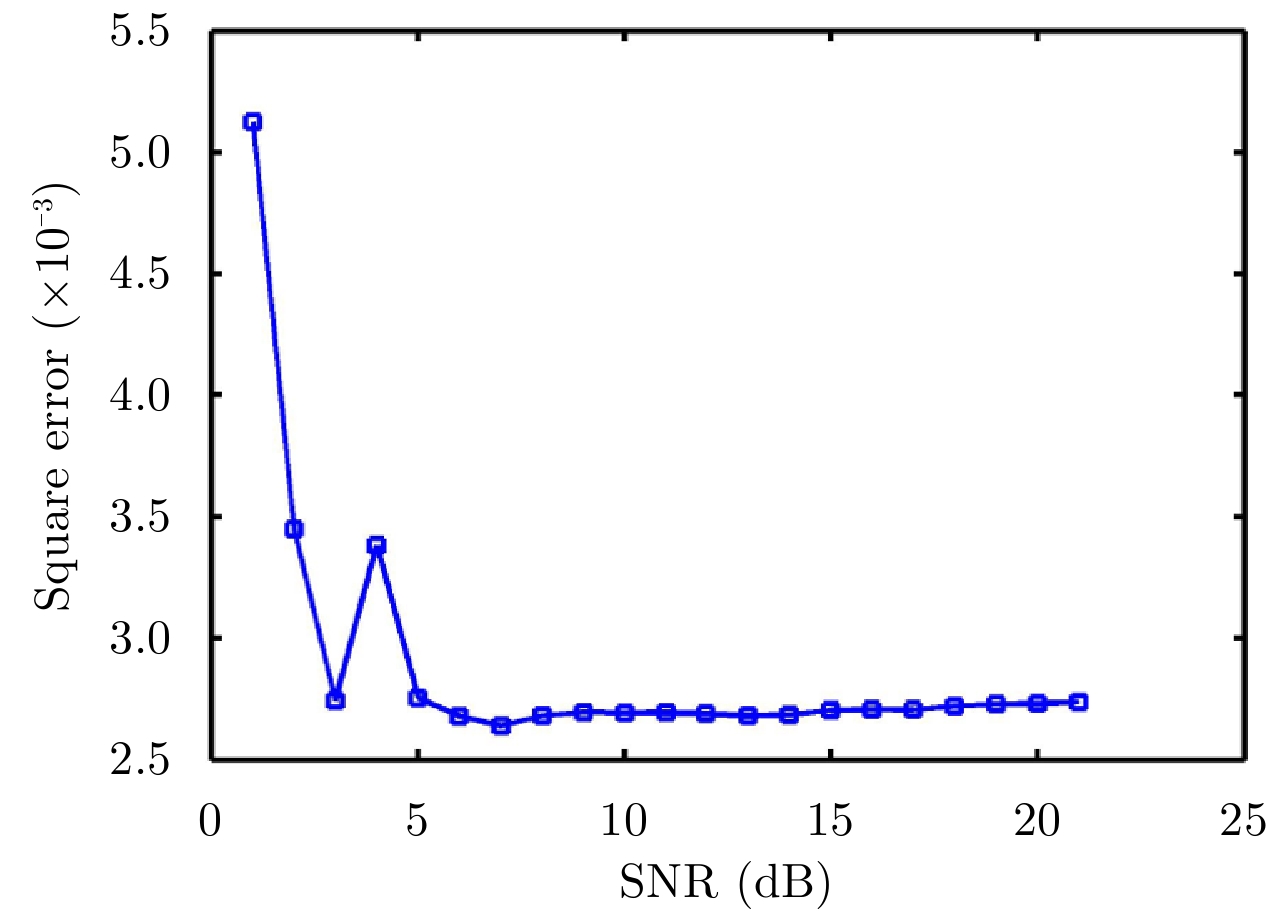
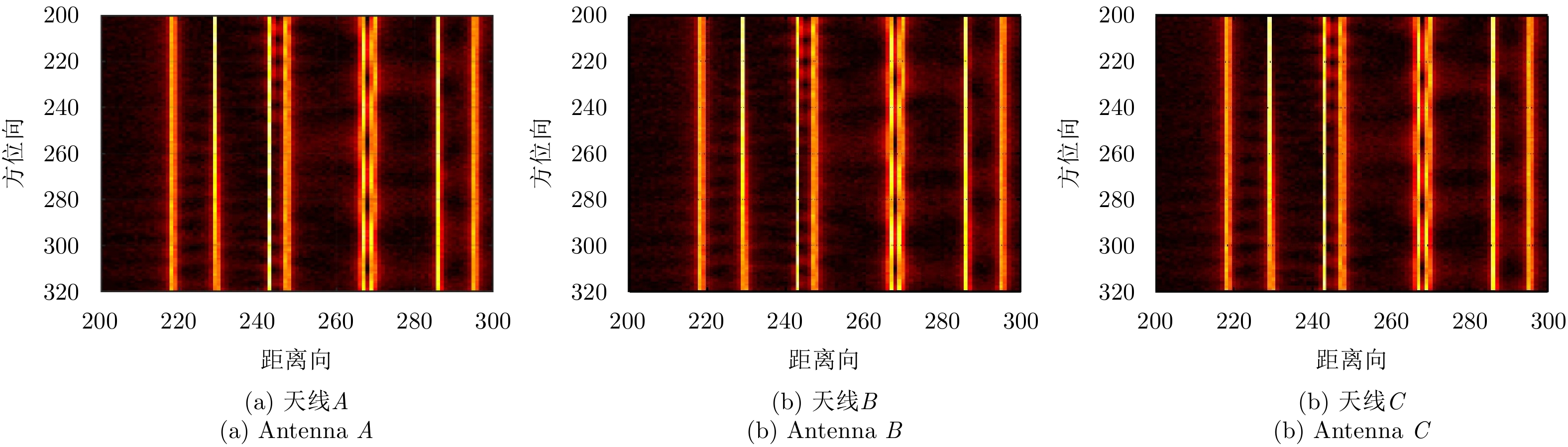
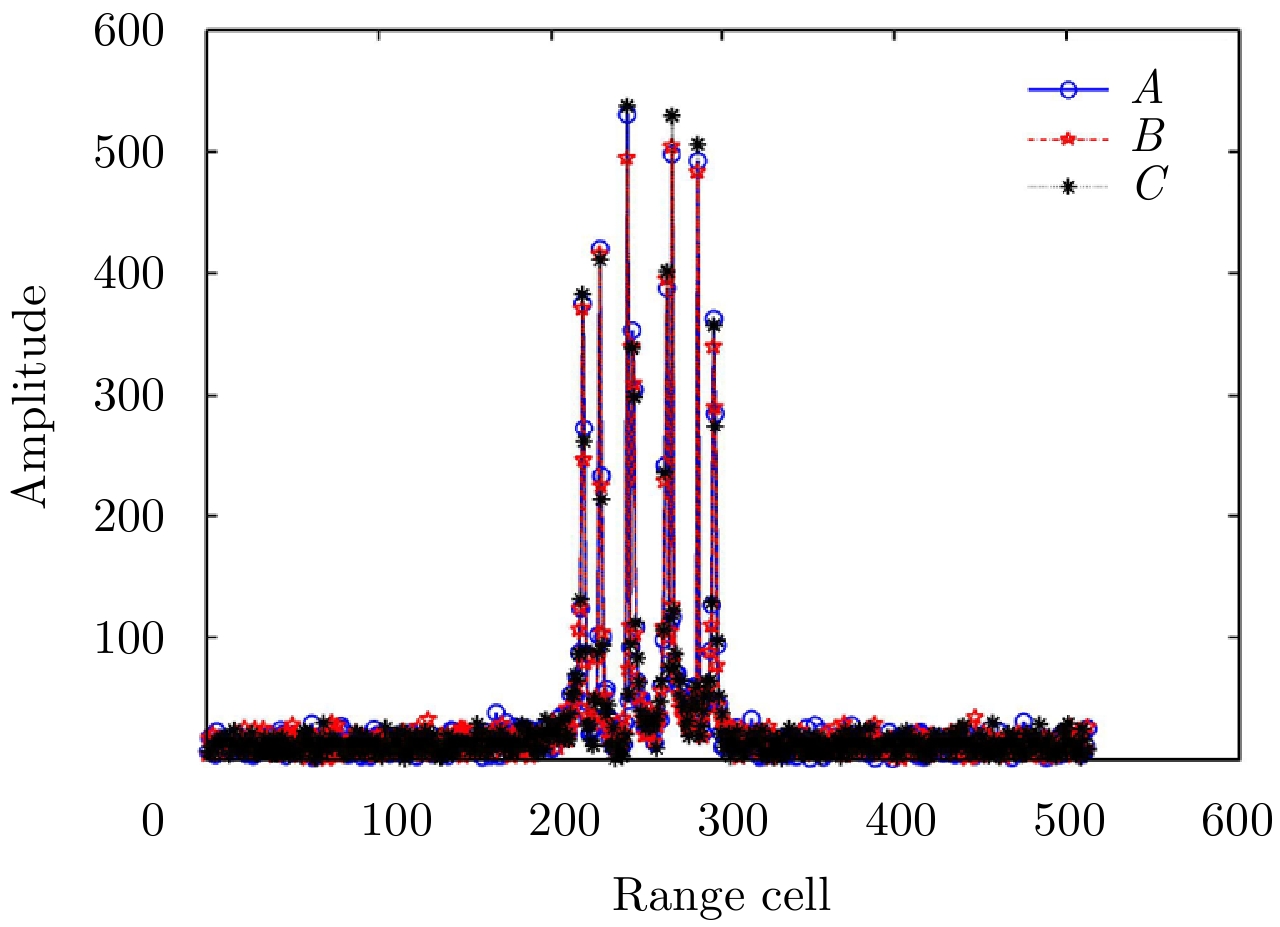
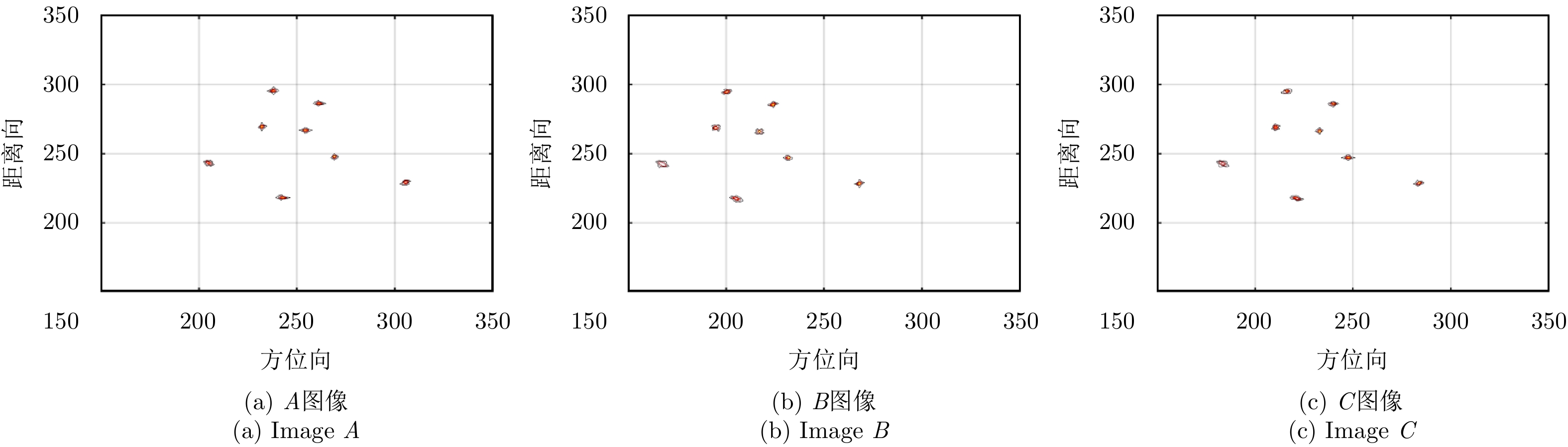
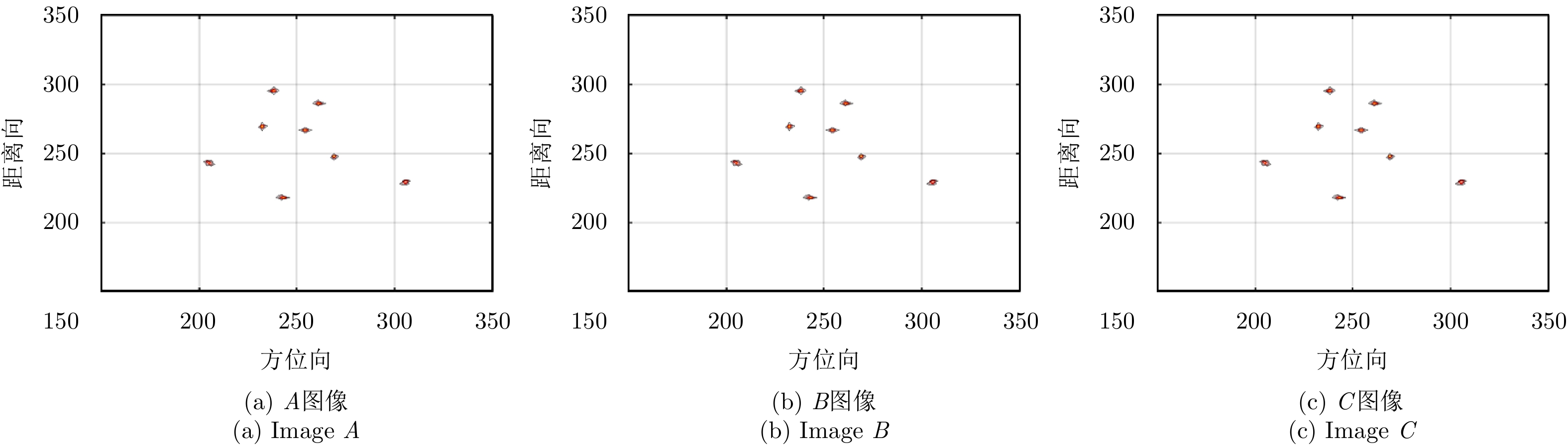
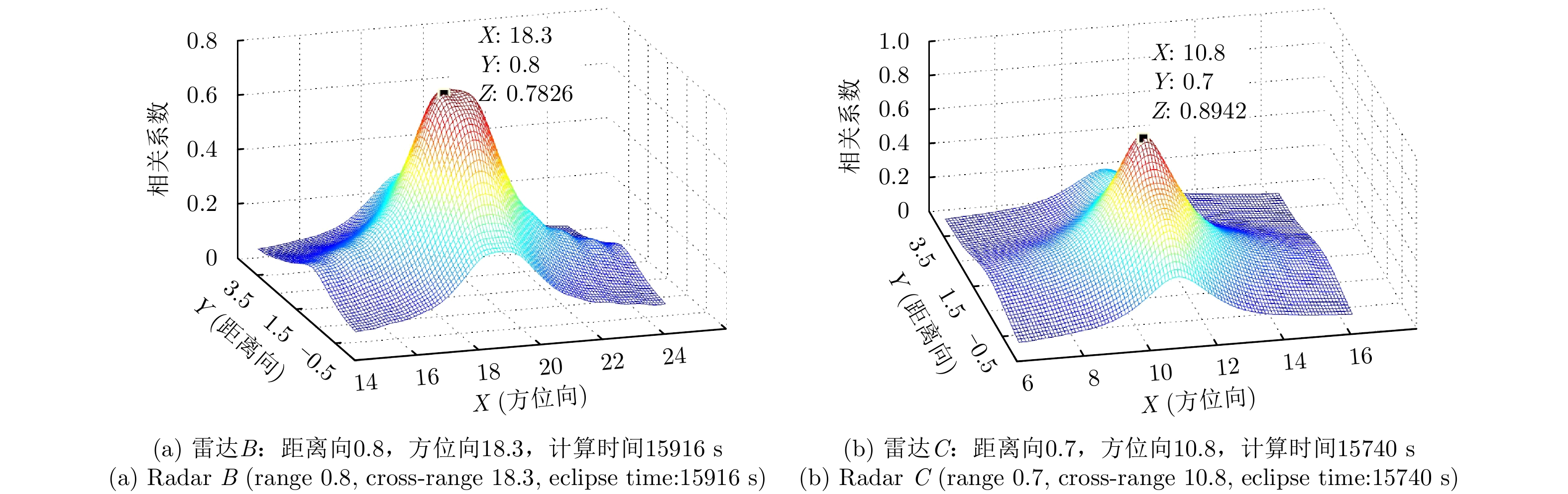
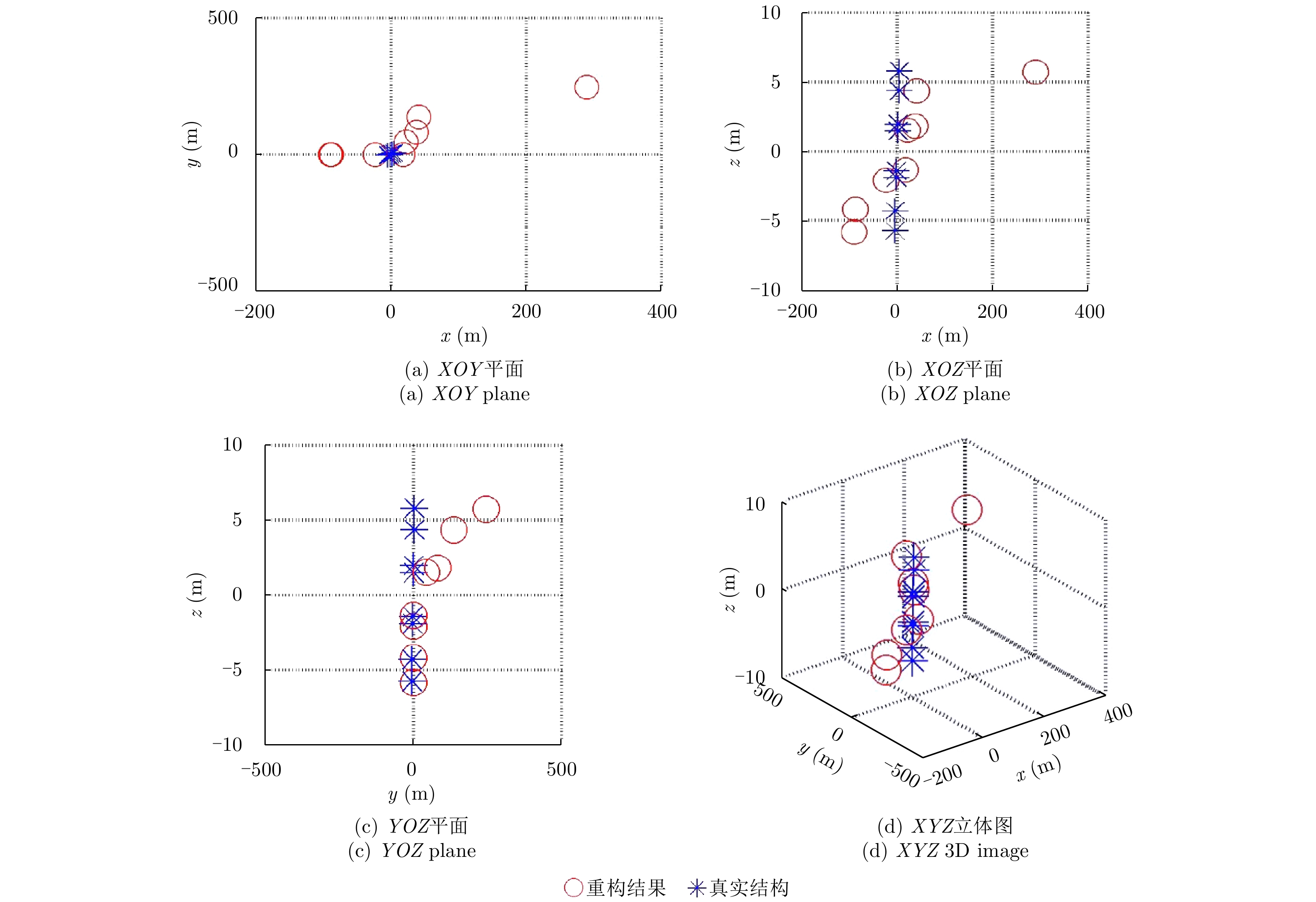
逆合成孔径雷达(ISAR)图像配准是干涉逆合成孔径雷达(InISAR)成像领域一个关键的课题,可以实现同一散射点在不同ISAR图像中的对齐,以便于后续的ISAR图像干涉处理。该文分析了ISAR图像失配准的原因,即散射点到不同天线之间的波程差,并据此提出一种基于波程差补偿的方法来实现不同天线ISAR图像之间的精确配准。首先通过调频傅里叶变换估计目标相对于雷达的转速;进一步根据波程差与目标转动角速度的关系构建补偿相位消除散射点到不同天线间的波程差,并通过2维傅里叶变换获得配准之后的ISAR图像。最后利用干涉处理获得目标真实的3维结构。该文方法可以在回波域通过波程差补偿实现ISAR图像配准,配准之后的各散射点在图像中的位置相同;而经过相关法配准之后的ISAR图像中的各散射点之间有一个像素单元的错位,即该方法的配准效果更精确。此外,基于相关法的图像配准方法耗时达到万秒级,而基于该方法的ISAR图像配准时间仅为秒级,即该方法计算效率更高。最终的InISAR 3维成像结果中,该方法的散射点坐标重构误差为0.3034,而基于相关法的成像结果的误差(45.8529)远大于此。因此,基于所提出方法的InISAR 3维成像结果精度更高。 逆合成孔径雷达(ISAR)图像配准是干涉逆合成孔径雷达(InISAR)成像领域一个关键的课题,可以实现同一散射点在不同ISAR图像中的对齐,以便于后续的ISAR图像干涉处理。该文分析了ISAR图像失配准的原因,即散射点到不同天线之间的波程差,并据此提出一种基于波程差补偿的方法来实现不同天线ISAR图像之间的精确配准。首先通过调频傅里叶变换估计目标相对于雷达的转速;进一步根据波程差与目标转动角速度的关系构建补偿相位消除散射点到不同天线间的波程差,并通过2维傅里叶变换获得配准之后的ISAR图像。最后利用干涉处理获得目标真实的3维结构。该文方法可以在回波域通过波程差补偿实现ISAR图像配准,配准之后的各散射点在图像中的位置相同;而经过相关法配准之后的ISAR图像中的各散射点之间有一个像素单元的错位,即该方法的配准效果更精确。此外,基于相关法的图像配准方法耗时达到万秒级,而基于该方法的ISAR图像配准时间仅为秒级,即该方法计算效率更高。最终的InISAR 3维成像结果中,该方法的散射点坐标重构误差为0.3034,而基于相关法的成像结果的误差(45.8529)远大于此。因此,基于所提出方法的InISAR 3维成像结果精度更高。
逆合成孔径雷达(ISAR)图像配准是干涉逆合成孔径雷达(InISAR)成像领域一个关键的课题,可以实现同一散射点在不同ISAR图像中的对齐,以便于后续的ISAR图像干涉处理。该文分析了ISAR图像失配准的原因,即散射点到不同天线之间的波程差,并据此提出一种基于波程差补偿的方法来实现不同天线ISAR图像之间的精确配准。首先通过调频傅里叶变换估计目标相对于雷达的转速;进一步根据波程差与目标转动角速度的关系构建补偿相位消除散射点到不同天线间的波程差,并通过2维傅里叶变换获得配准之后的ISAR图像。最后利用干涉处理获得目标真实的3维结构。该文方法可以在回波域通过波程差补偿实现ISAR图像配准,配准之后的各散射点在图像中的位置相同;而经过相关法配准之后的ISAR图像中的各散射点之间有一个像素单元的错位,即该方法的配准效果更精确。此外,基于相关法的图像配准方法耗时达到万秒级,而基于该方法的ISAR图像配准时间仅为秒级,即该方法计算效率更高。最终的InISAR 3维成像结果中,该方法的散射点坐标重构误差为0.3034,而基于相关法的成像结果的误差(45.8529)远大于此。因此,基于所提出方法的InISAR 3维成像结果精度更高。 逆合成孔径雷达(ISAR)图像配准是干涉逆合成孔径雷达(InISAR)成像领域一个关键的课题,可以实现同一散射点在不同ISAR图像中的对齐,以便于后续的ISAR图像干涉处理。该文分析了ISAR图像失配准的原因,即散射点到不同天线之间的波程差,并据此提出一种基于波程差补偿的方法来实现不同天线ISAR图像之间的精确配准。首先通过调频傅里叶变换估计目标相对于雷达的转速;进一步根据波程差与目标转动角速度的关系构建补偿相位消除散射点到不同天线间的波程差,并通过2维傅里叶变换获得配准之后的ISAR图像。最后利用干涉处理获得目标真实的3维结构。该文方法可以在回波域通过波程差补偿实现ISAR图像配准,配准之后的各散射点在图像中的位置相同;而经过相关法配准之后的ISAR图像中的各散射点之间有一个像素单元的错位,即该方法的配准效果更精确。此外,基于相关法的图像配准方法耗时达到万秒级,而基于该方法的ISAR图像配准时间仅为秒级,即该方法计算效率更高。最终的InISAR 3维成像结果中,该方法的散射点坐标重构误差为0.3034,而基于相关法的成像结果的误差(45.8529)远大于此。因此,基于所提出方法的InISAR 3维成像结果精度更高。






2018, 7(6): 770-776.
摘要:
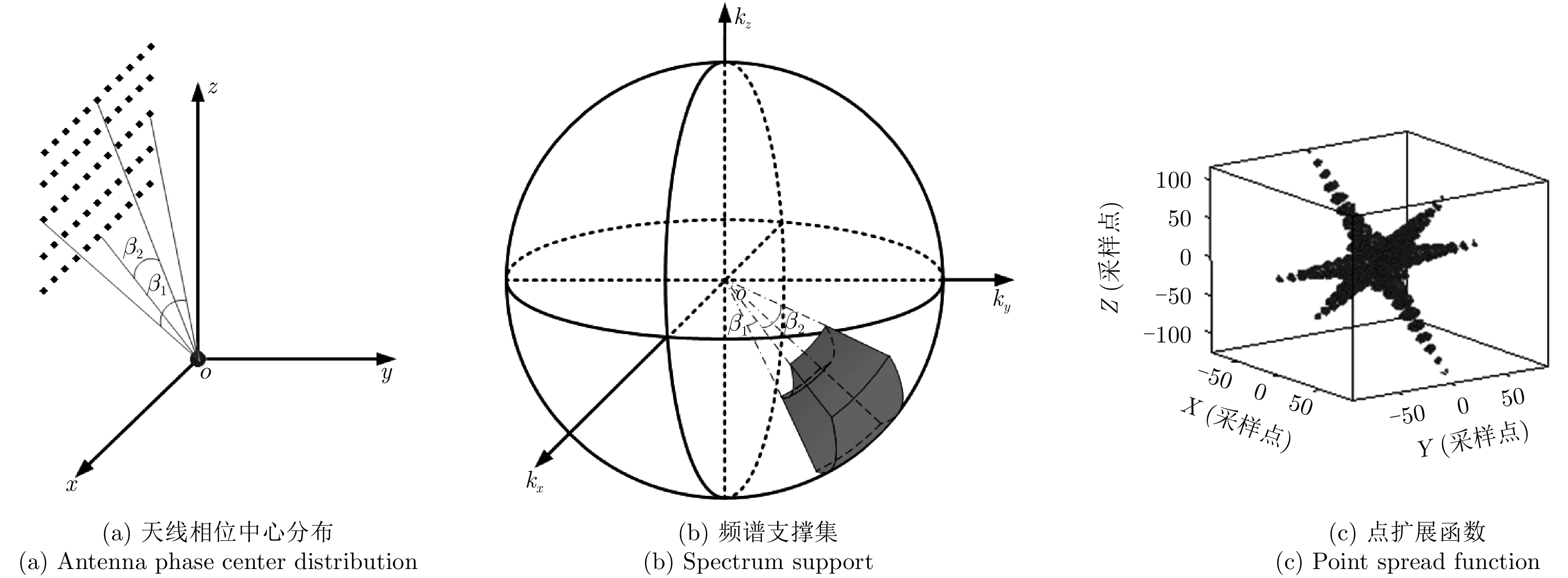
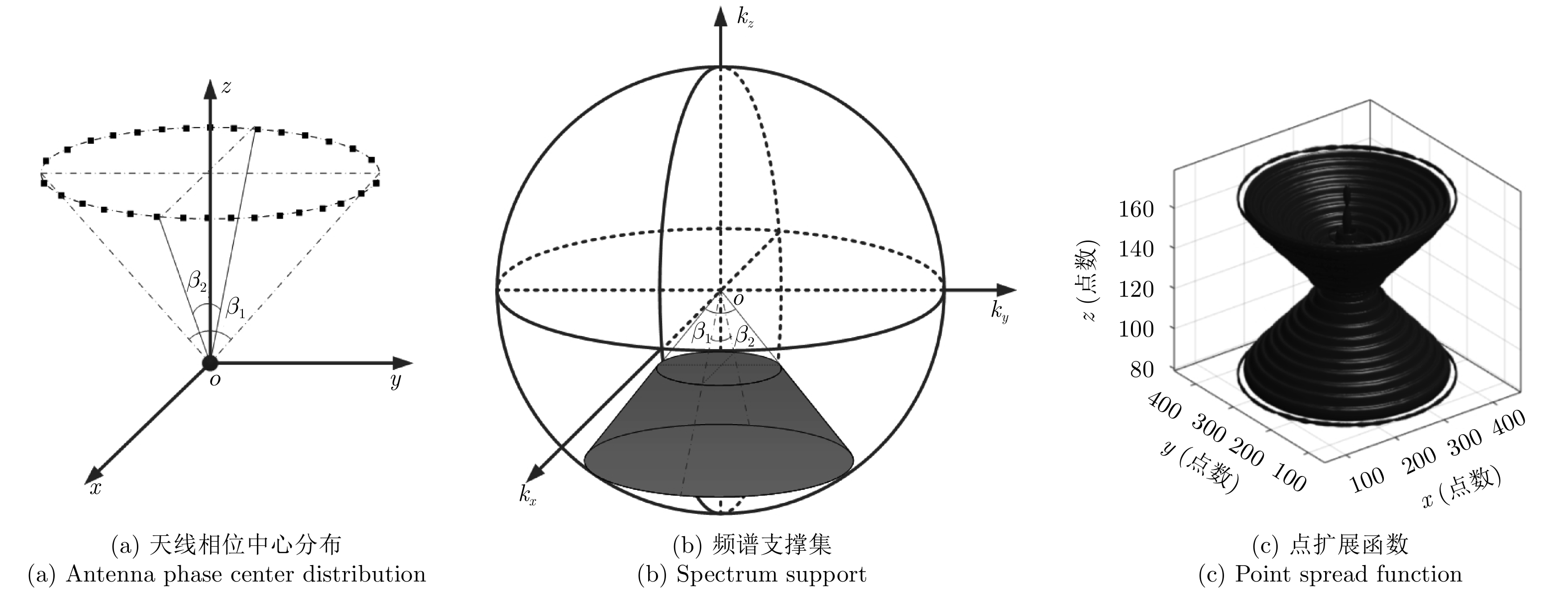
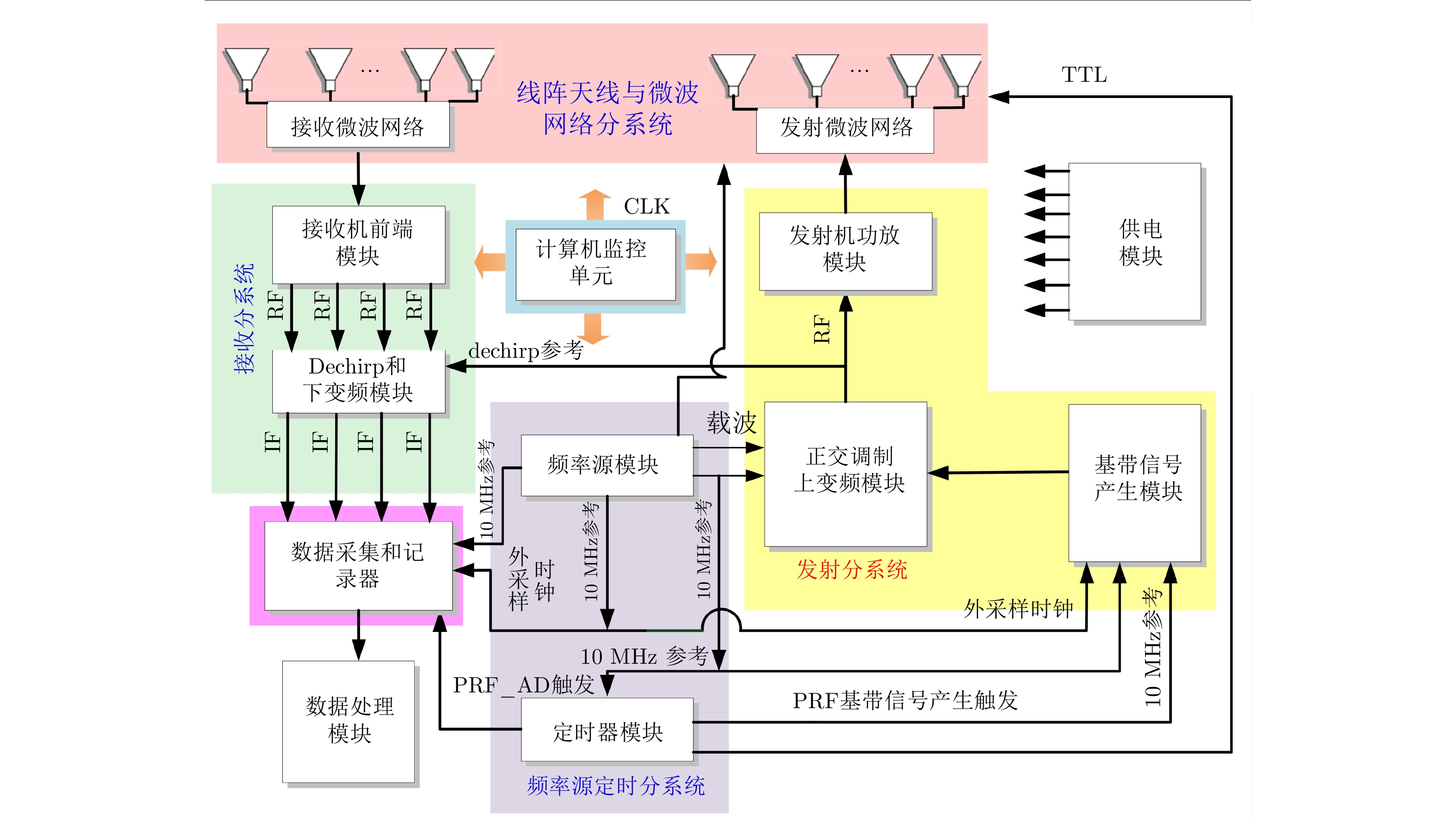
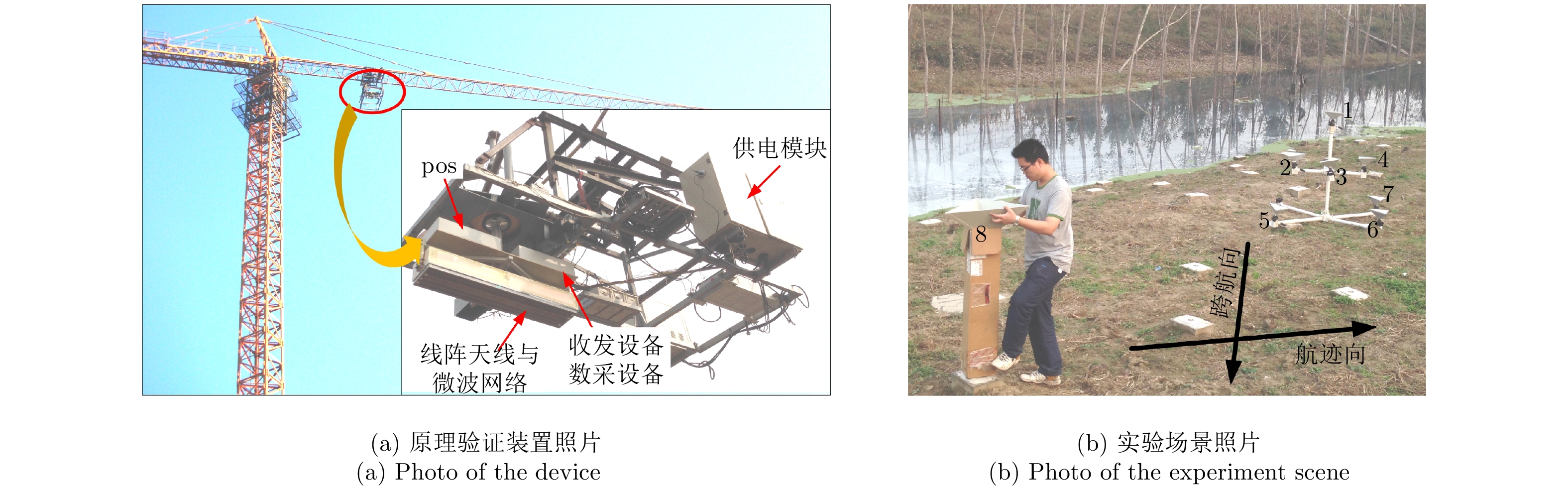
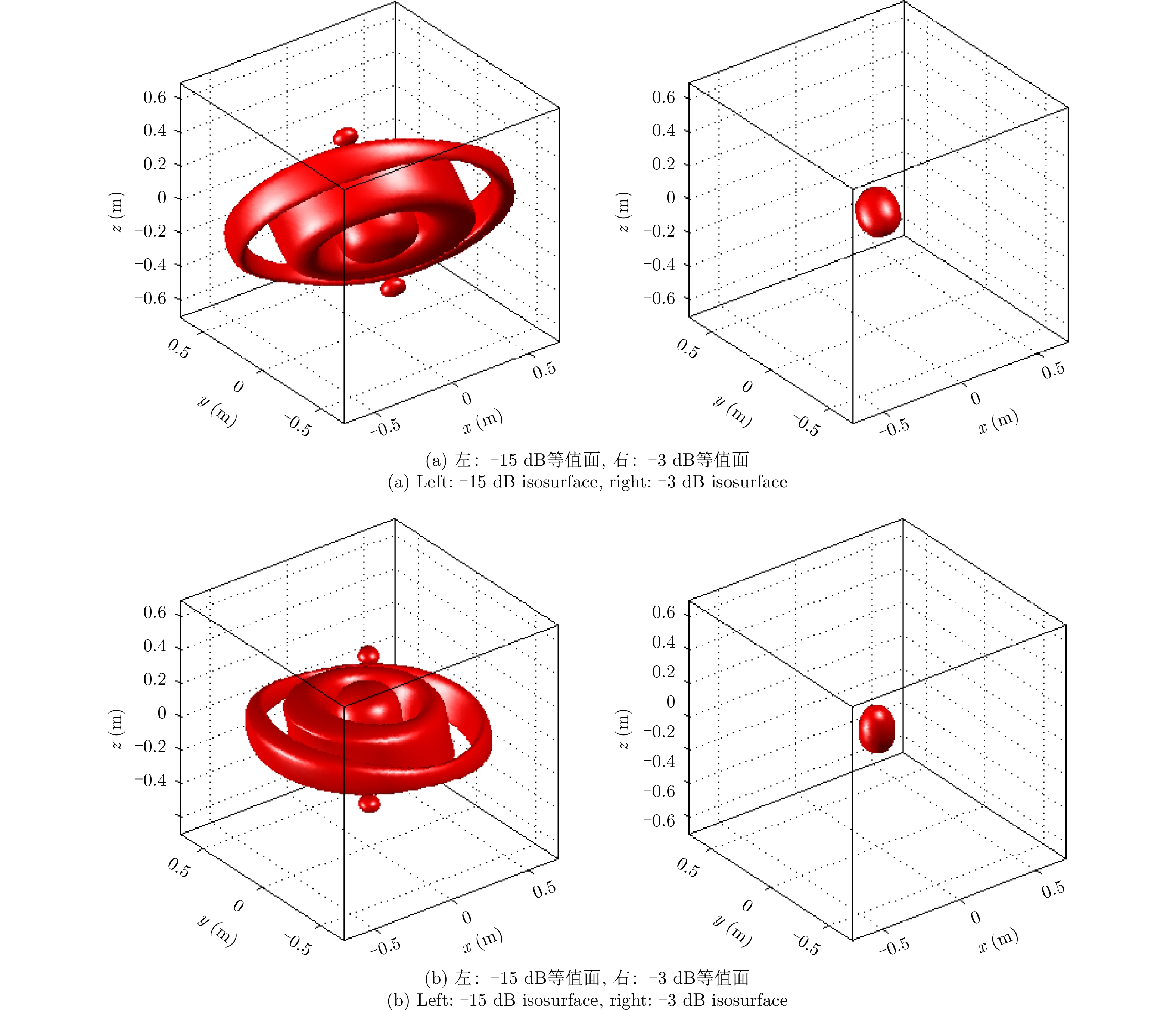
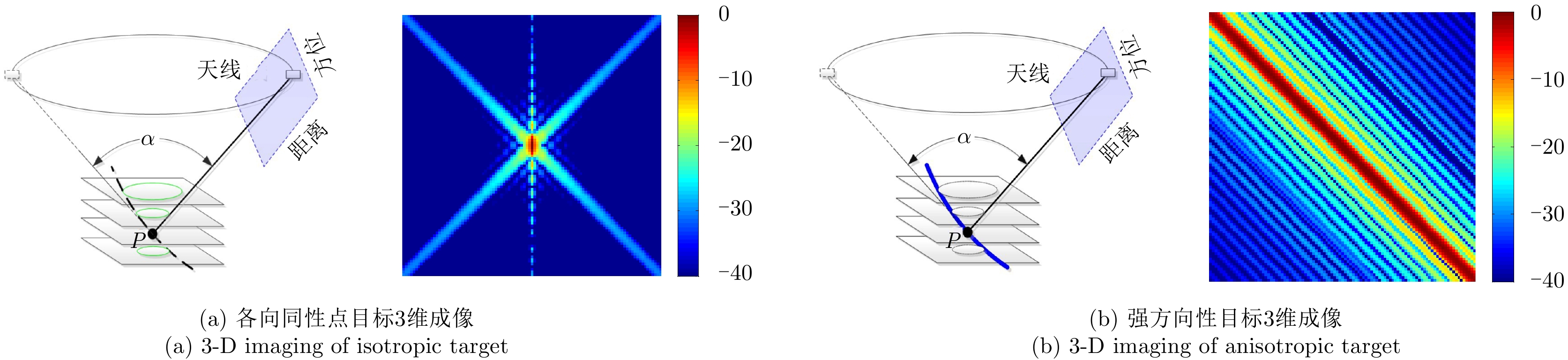
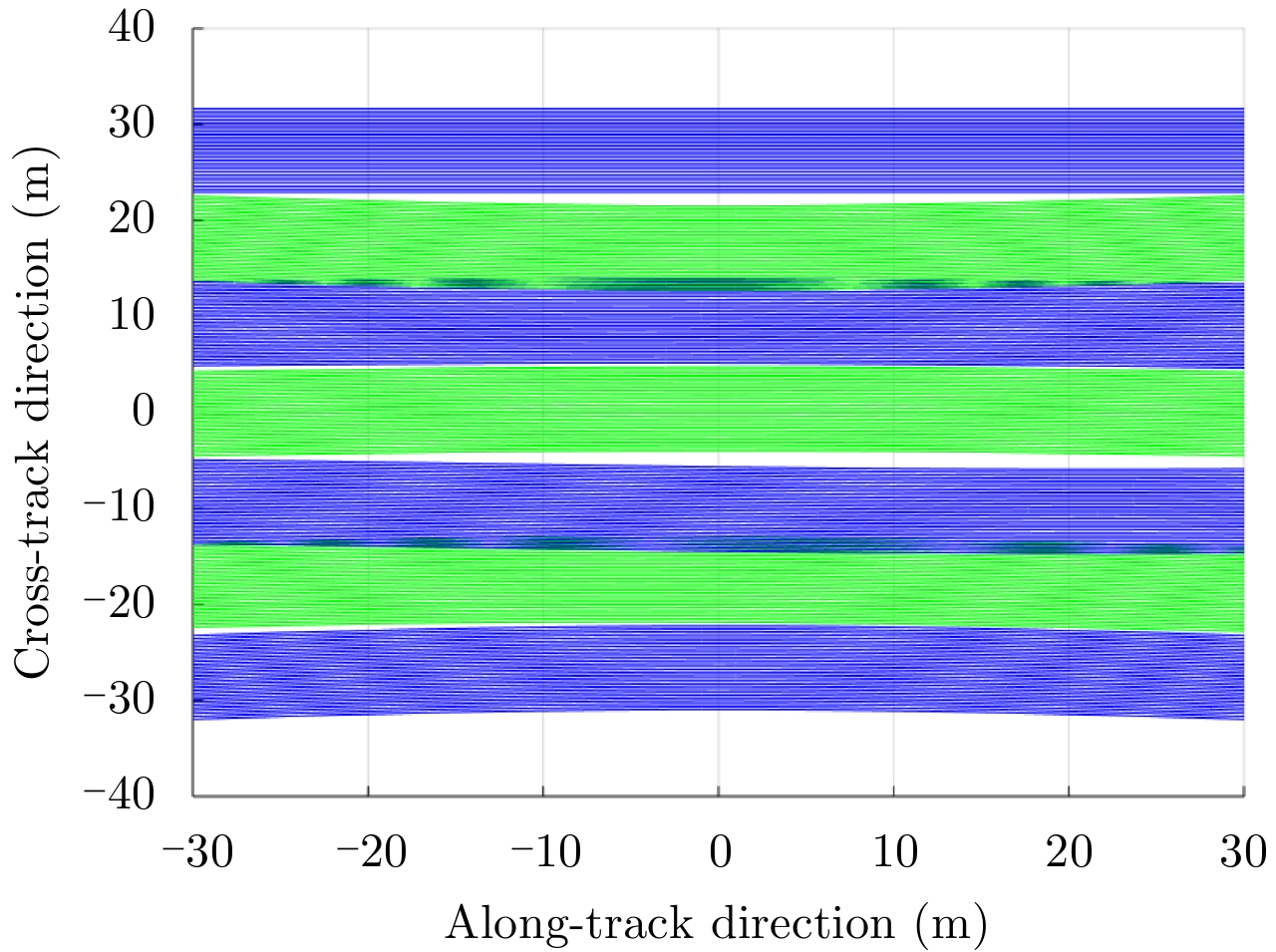
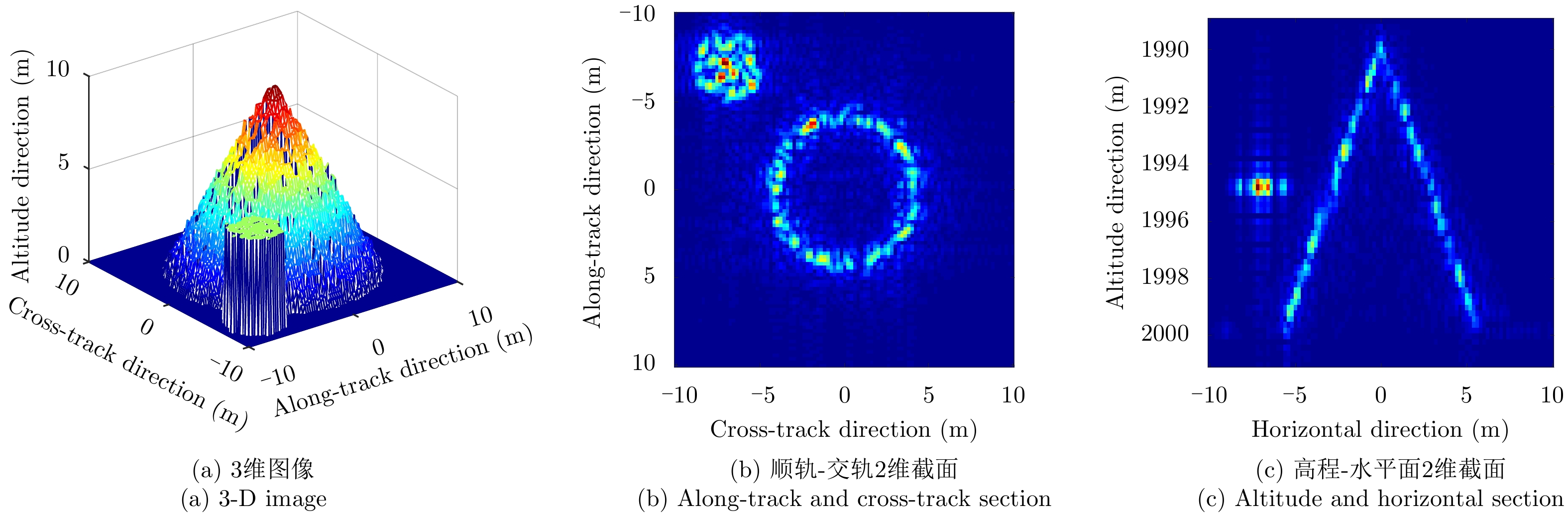
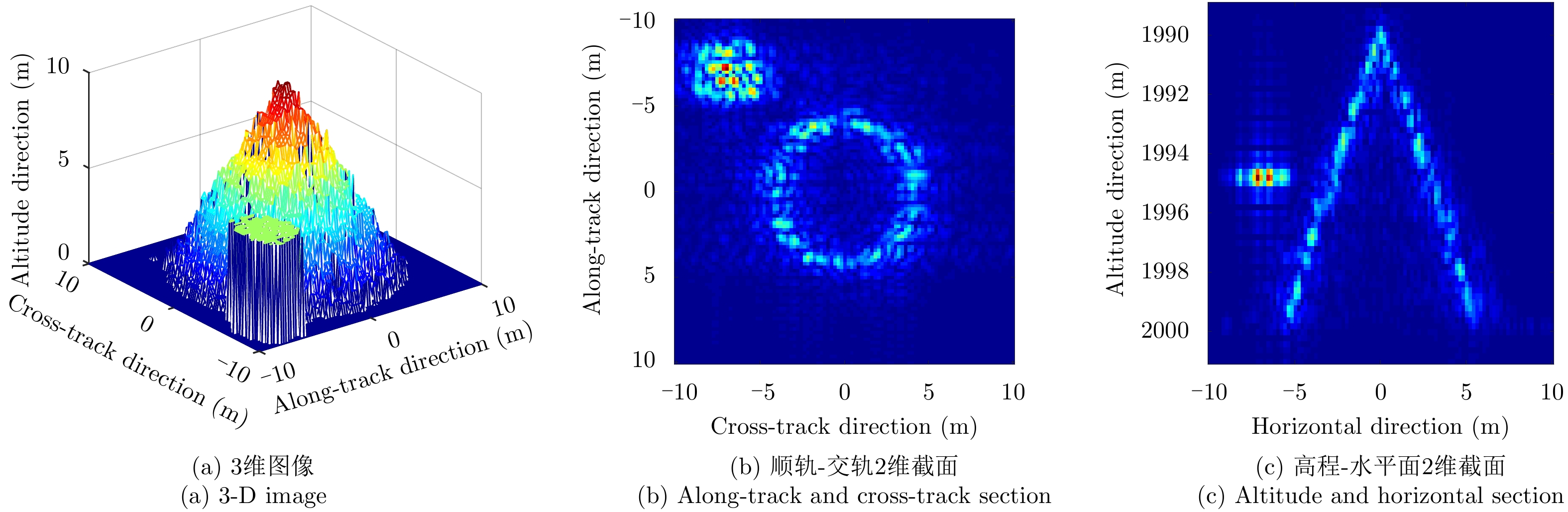
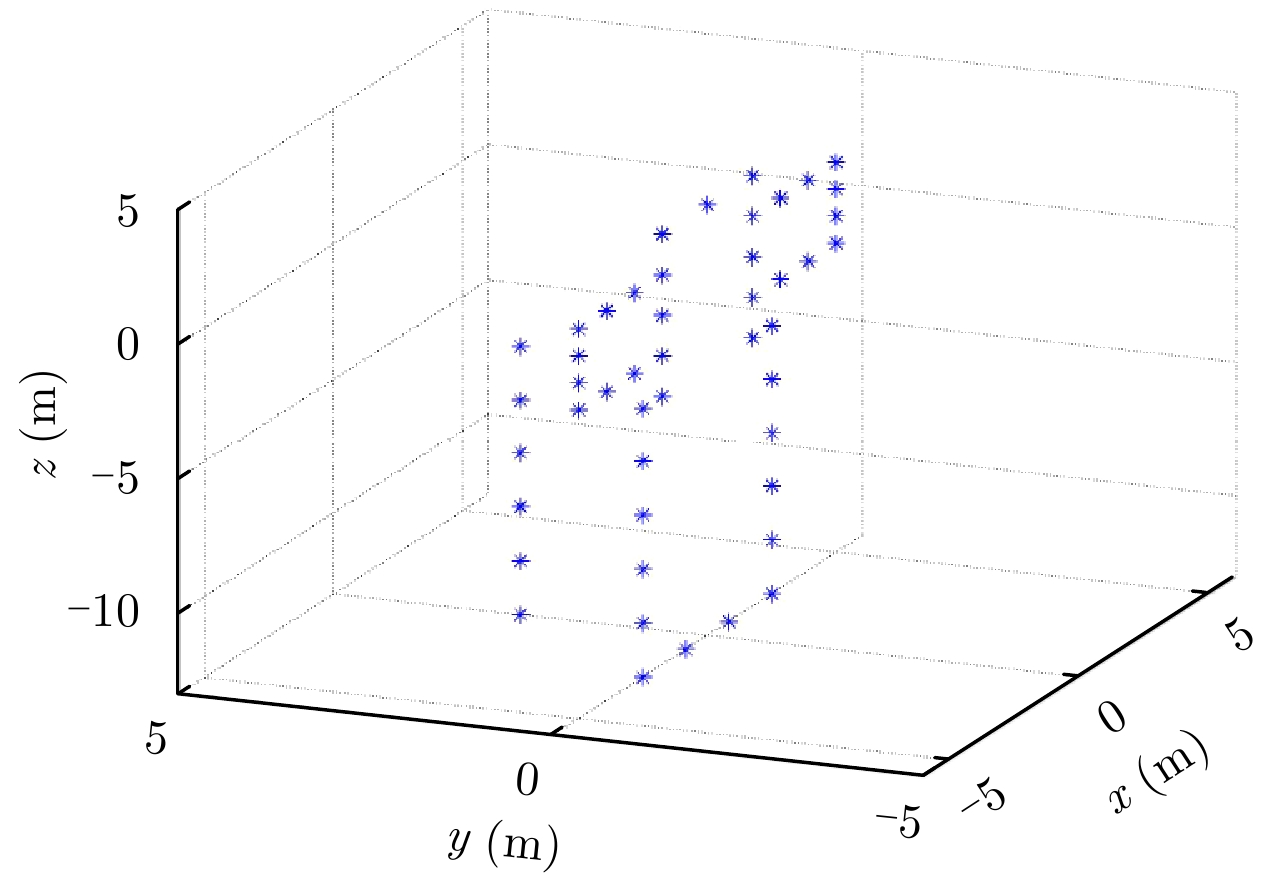
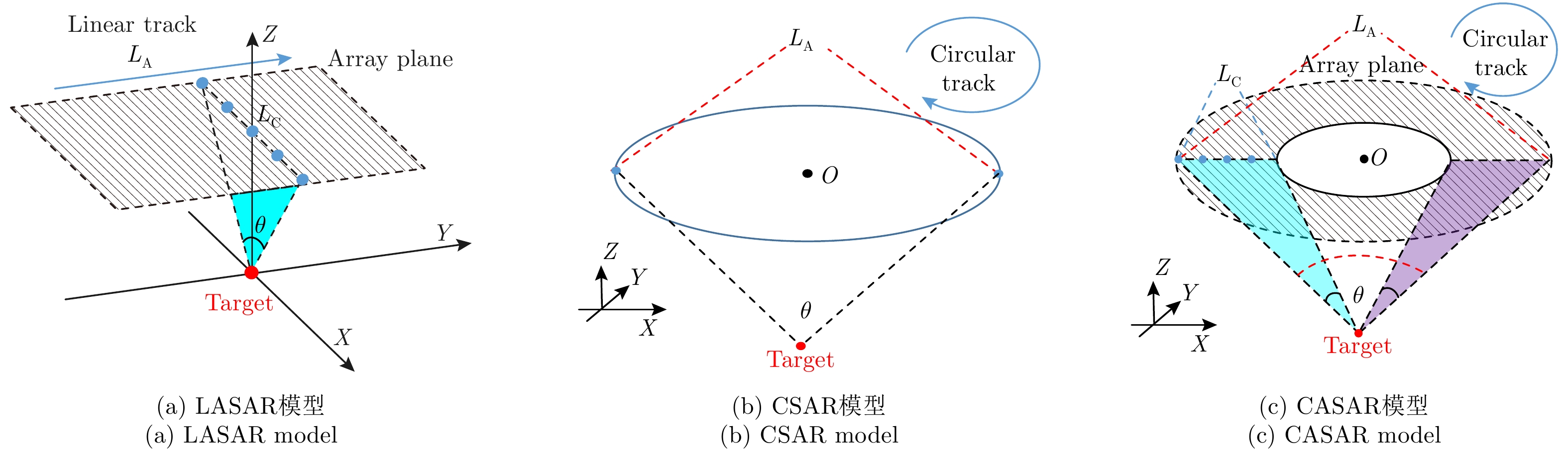
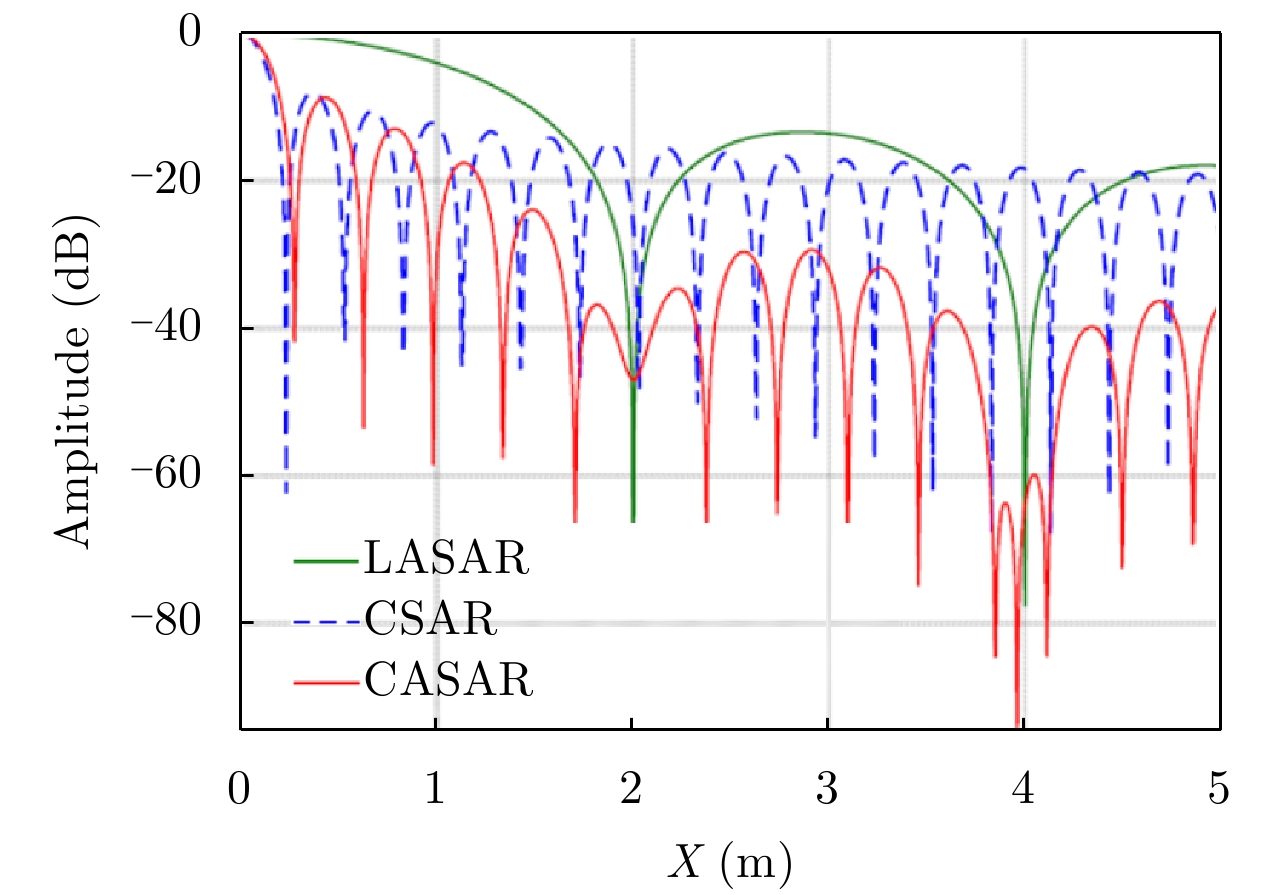
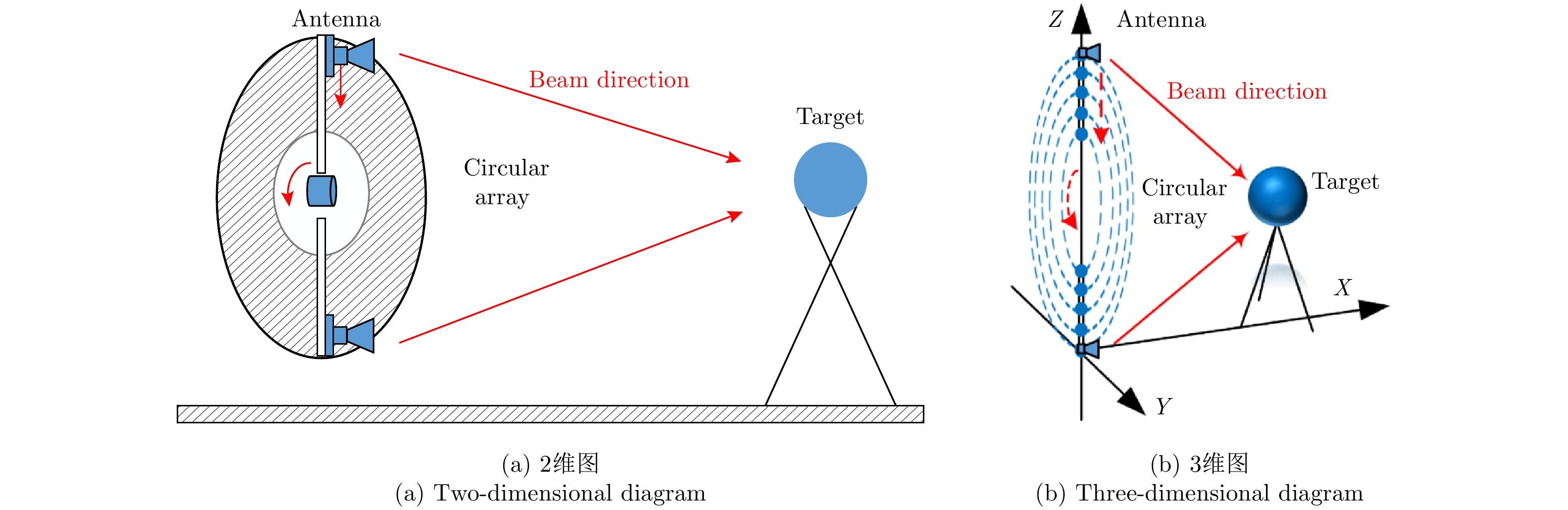
阵列合成孔径雷达(ASAR)具备3维成像能力,是3维SAR成像领域的研究热点之一。该文针对线阵SAR在高分辨率成像方面和圆周SAR在旁瓣抑制方面的问题,提出一种新型圆迹阵列合成孔径雷达(CASAR)系统用于3维高分辨率雷达成像。首先推导基于CASAR系统的点扩散函数模型,从理论上分析圆迹阵列这一新型构型在3维成像中的优势。在此基础上构建原型CASAR实验系统,通过点扩散函数仿真实验和室外实测3维CASAR成像实验验证了3维CASAR成像的有效性,与线阵SAR和圆周SAR实验结果相比,证明CASAR系统可获得3维高分辨率SAR图像以及有效的旁瓣抑制能力。 阵列合成孔径雷达(ASAR)具备3维成像能力,是3维SAR成像领域的研究热点之一。该文针对线阵SAR在高分辨率成像方面和圆周SAR在旁瓣抑制方面的问题,提出一种新型圆迹阵列合成孔径雷达(CASAR)系统用于3维高分辨率雷达成像。首先推导基于CASAR系统的点扩散函数模型,从理论上分析圆迹阵列这一新型构型在3维成像中的优势。在此基础上构建原型CASAR实验系统,通过点扩散函数仿真实验和室外实测3维CASAR成像实验验证了3维CASAR成像的有效性,与线阵SAR和圆周SAR实验结果相比,证明CASAR系统可获得3维高分辨率SAR图像以及有效的旁瓣抑制能力。
阵列合成孔径雷达(ASAR)具备3维成像能力,是3维SAR成像领域的研究热点之一。该文针对线阵SAR在高分辨率成像方面和圆周SAR在旁瓣抑制方面的问题,提出一种新型圆迹阵列合成孔径雷达(CASAR)系统用于3维高分辨率雷达成像。首先推导基于CASAR系统的点扩散函数模型,从理论上分析圆迹阵列这一新型构型在3维成像中的优势。在此基础上构建原型CASAR实验系统,通过点扩散函数仿真实验和室外实测3维CASAR成像实验验证了3维CASAR成像的有效性,与线阵SAR和圆周SAR实验结果相比,证明CASAR系统可获得3维高分辨率SAR图像以及有效的旁瓣抑制能力。 阵列合成孔径雷达(ASAR)具备3维成像能力,是3维SAR成像领域的研究热点之一。该文针对线阵SAR在高分辨率成像方面和圆周SAR在旁瓣抑制方面的问题,提出一种新型圆迹阵列合成孔径雷达(CASAR)系统用于3维高分辨率雷达成像。首先推导基于CASAR系统的点扩散函数模型,从理论上分析圆迹阵列这一新型构型在3维成像中的优势。在此基础上构建原型CASAR实验系统,通过点扩散函数仿真实验和室外实测3维CASAR成像实验验证了3维CASAR成像的有效性,与线阵SAR和圆周SAR实验结果相比,证明CASAR系统可获得3维高分辨率SAR图像以及有效的旁瓣抑制能力。





 微信 | 公众平台
微信 | 公众平台 

