
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
Image Registration Based on Wave Path Difference Compensation for InISAR
-
摘要: 逆合成孔径雷达(ISAR)图像配准是干涉逆合成孔径雷达(InISAR)成像领域一个关键的课题,可以实现同一散射点在不同ISAR图像中的对齐,以便于后续的ISAR图像干涉处理。该文分析了ISAR图像失配准的原因,即散射点到不同天线之间的波程差,并据此提出一种基于波程差补偿的方法来实现不同天线ISAR图像之间的精确配准。首先通过调频傅里叶变换估计目标相对于雷达的转速;进一步根据波程差与目标转动角速度的关系构建补偿相位消除散射点到不同天线间的波程差,并通过2维傅里叶变换获得配准之后的ISAR图像。最后利用干涉处理获得目标真实的3维结构。该文方法可以在回波域通过波程差补偿实现ISAR图像配准,配准之后的各散射点在图像中的位置相同;而经过相关法配准之后的ISAR图像中的各散射点之间有一个像素单元的错位,即该方法的配准效果更精确。此外,基于相关法的图像配准方法耗时达到万秒级,而基于该方法的ISAR图像配准时间仅为秒级,即该方法计算效率更高。最终的InISAR 3维成像结果中,该方法的散射点坐标重构误差为0.3034,而基于相关法的成像结果的误差(45.8529)远大于此。因此,基于所提出方法的InISAR 3维成像结果精度更高。
-
关键词:
- 干涉逆合成孔径雷达 /
- 逆合成孔径雷达图像配准 /
- 波程差 /
- 调频傅里叶变换
Abstract: In Interferometric Inverse Synthetic Aperture Radar (InISAR) three-Dimensional (3D) imaging, Inverse Synthetic Aperture Radar (ISAR) image registration is a key process. It arranges similar scatterers in different ISAR images on the same pixel cell, which completes the interferometric processing for similar scatterers to obtain their 3D coordinates. This paper analyses the ISAR image mismatch caused by the difference of the wave path between the scatterer and different radars and then proposes a new ISAR image registration method that consists of three steps, based on wave path difference compensation. First, chirp Fourier transform is used to estimate the rotational angular velocity of the target. Second, the compensation phase is constructed according to the rotational angular velocity to eliminate the wave path difference between scatterer and different radars. Finally, two-Dimensional (2D) Fourier transform can yield ISAR images without mismatch. The proposed method can directly achieve ISAR image registration in an echo field. After image registration based on this method, the scatterers match-up well. But after image registration based on the correlation method, the scatterers have a mismatch of about one pixel cell. Compared to the correlation method, this method can achieve image registration more efficiently. Finally, the 3D imaging error (0.3034) based on this method is smaller than that (45.8529) of the correlation method. -
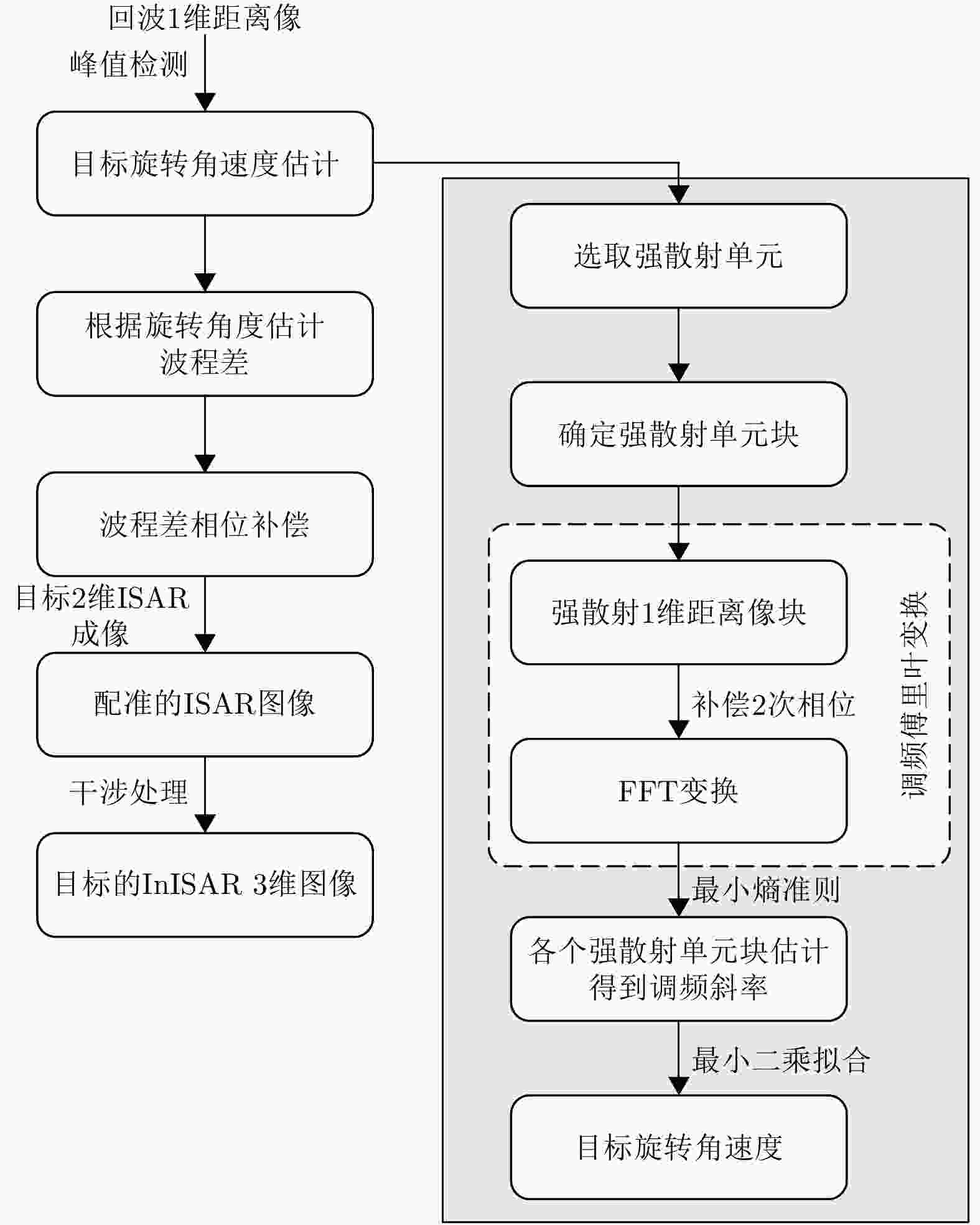
图 5 InISAR 3维成像的算法流程
Figure 5. Flowchart of the rotational angular velocity estimation algorithm
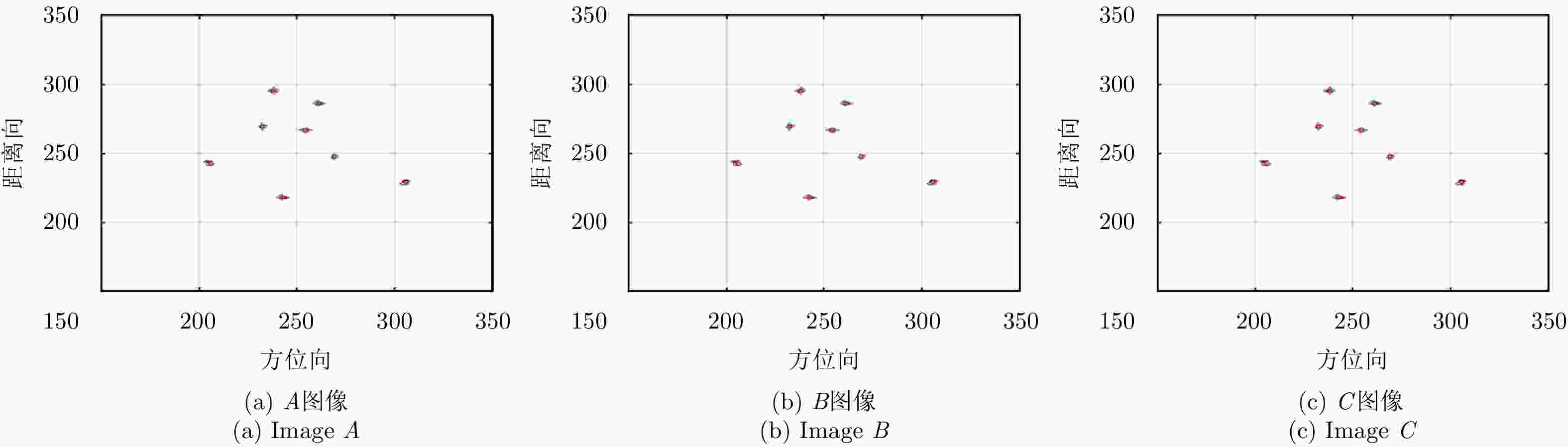
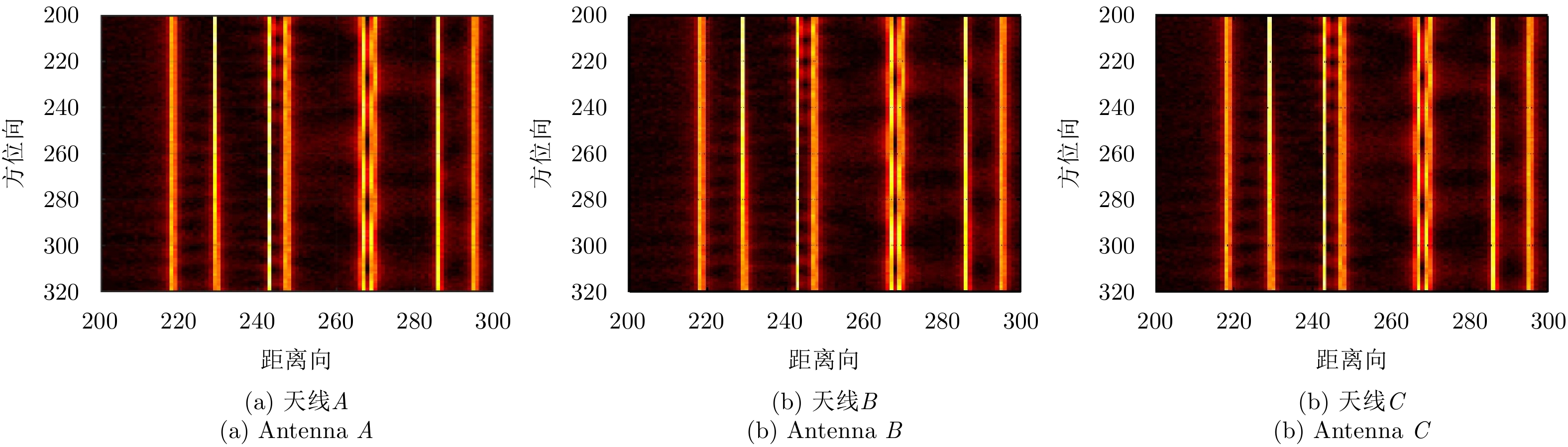
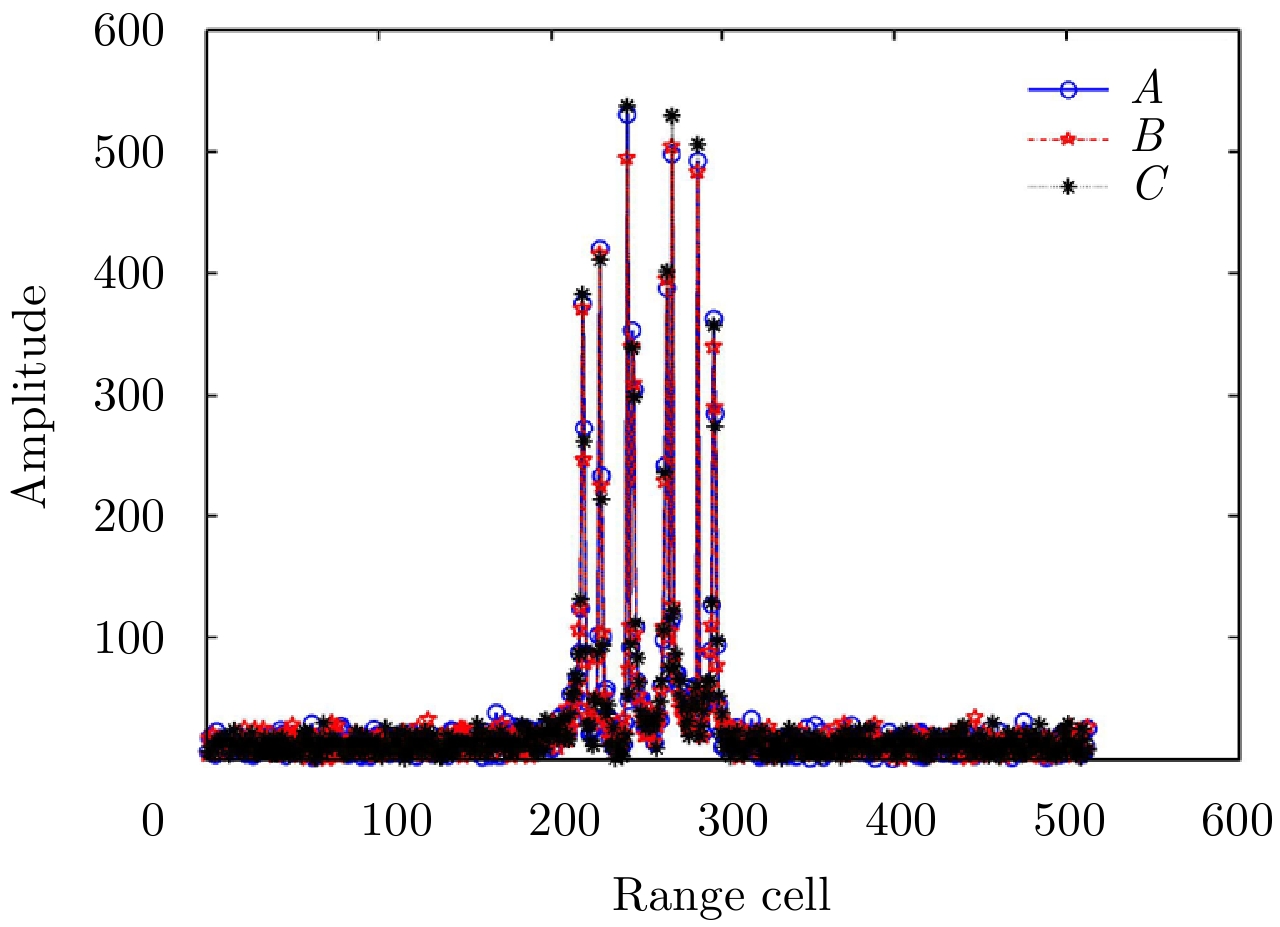
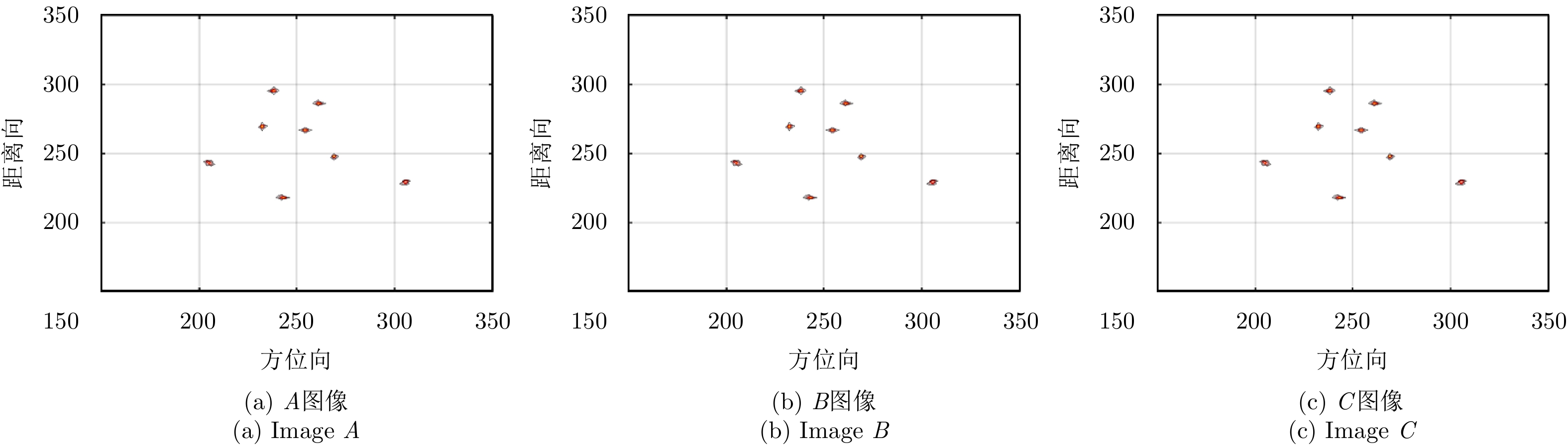
图 11 经过配准之后的目标ISAR图像
Figure 11. ISAR images after image registration based on the proposed method
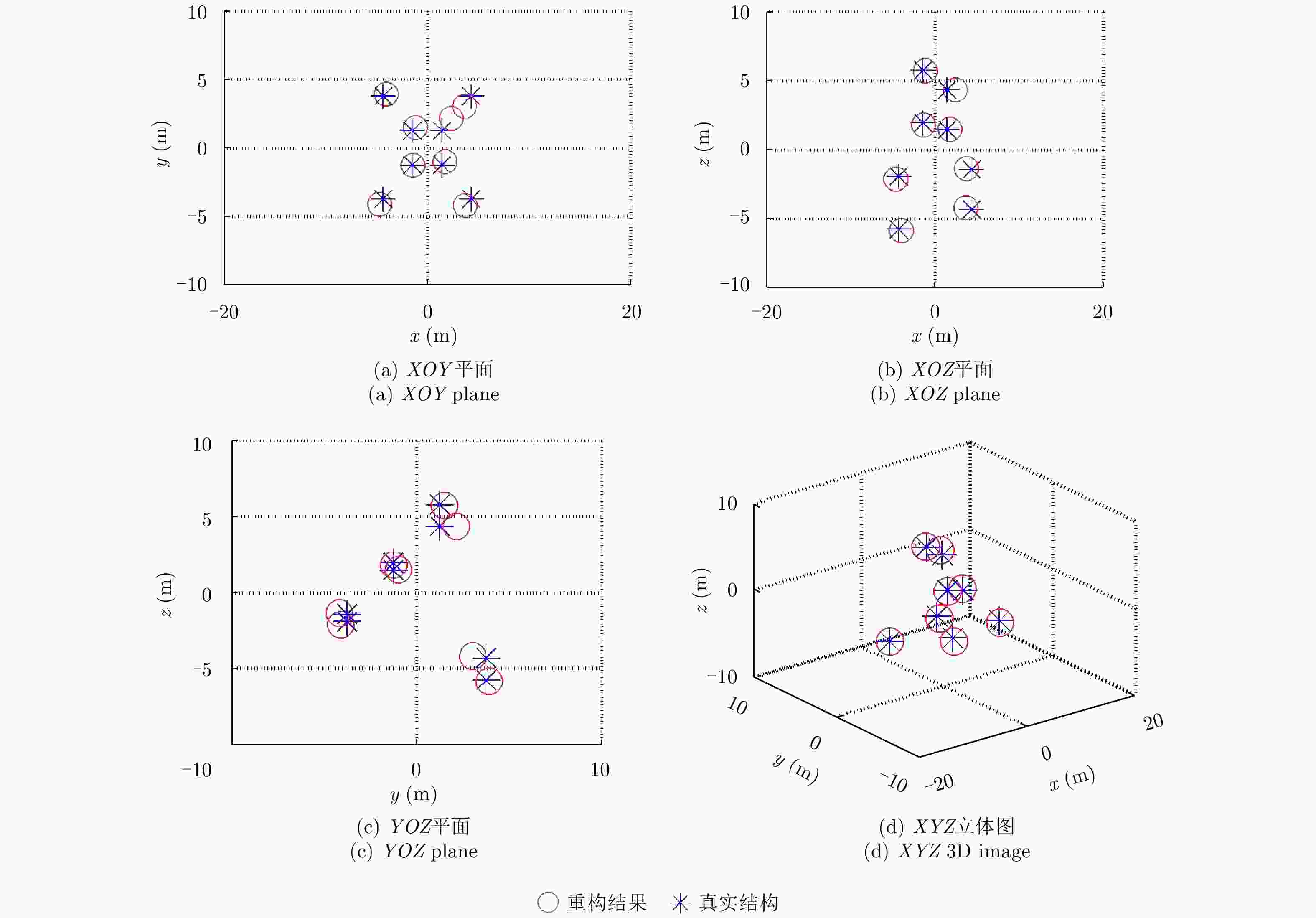
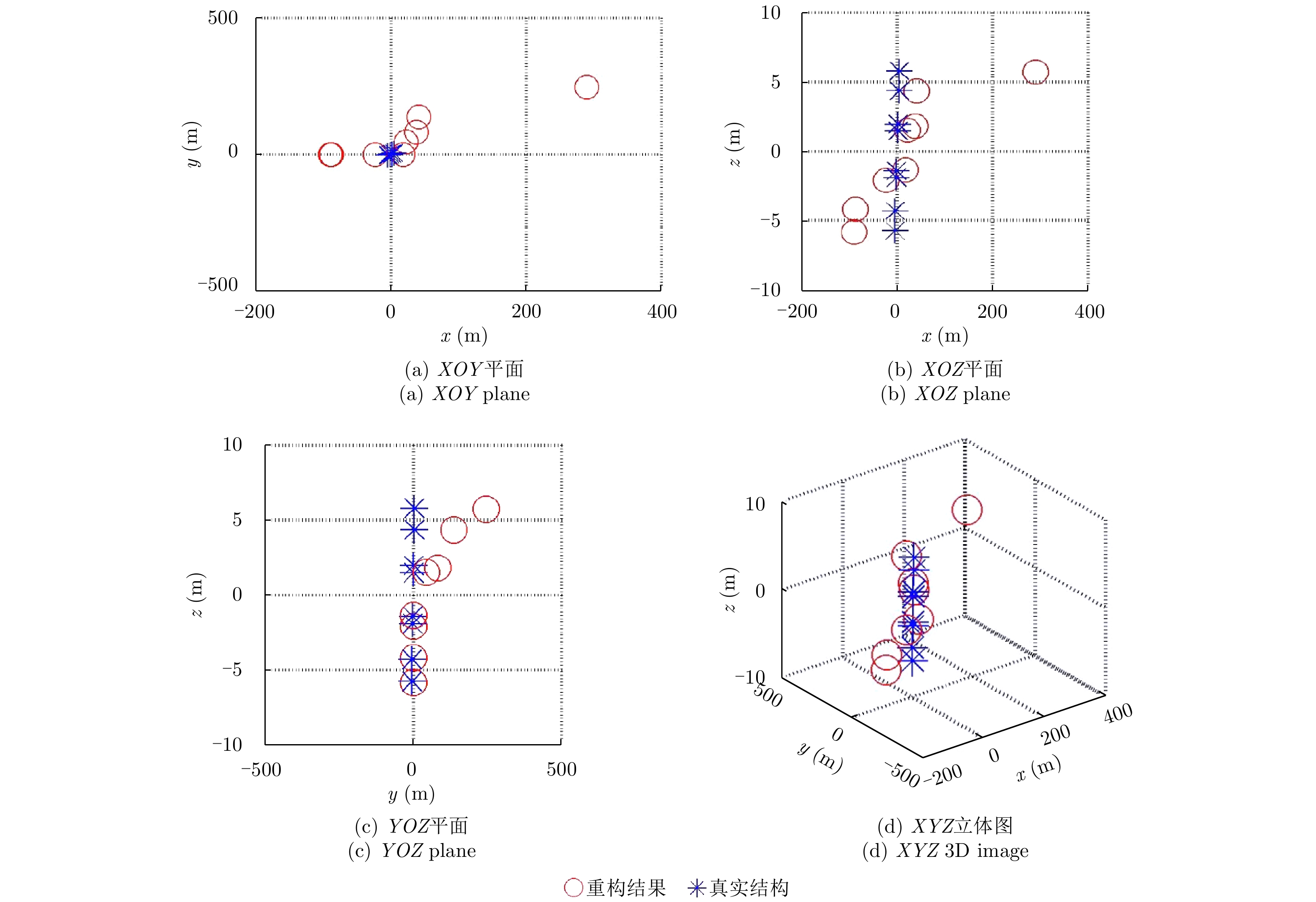
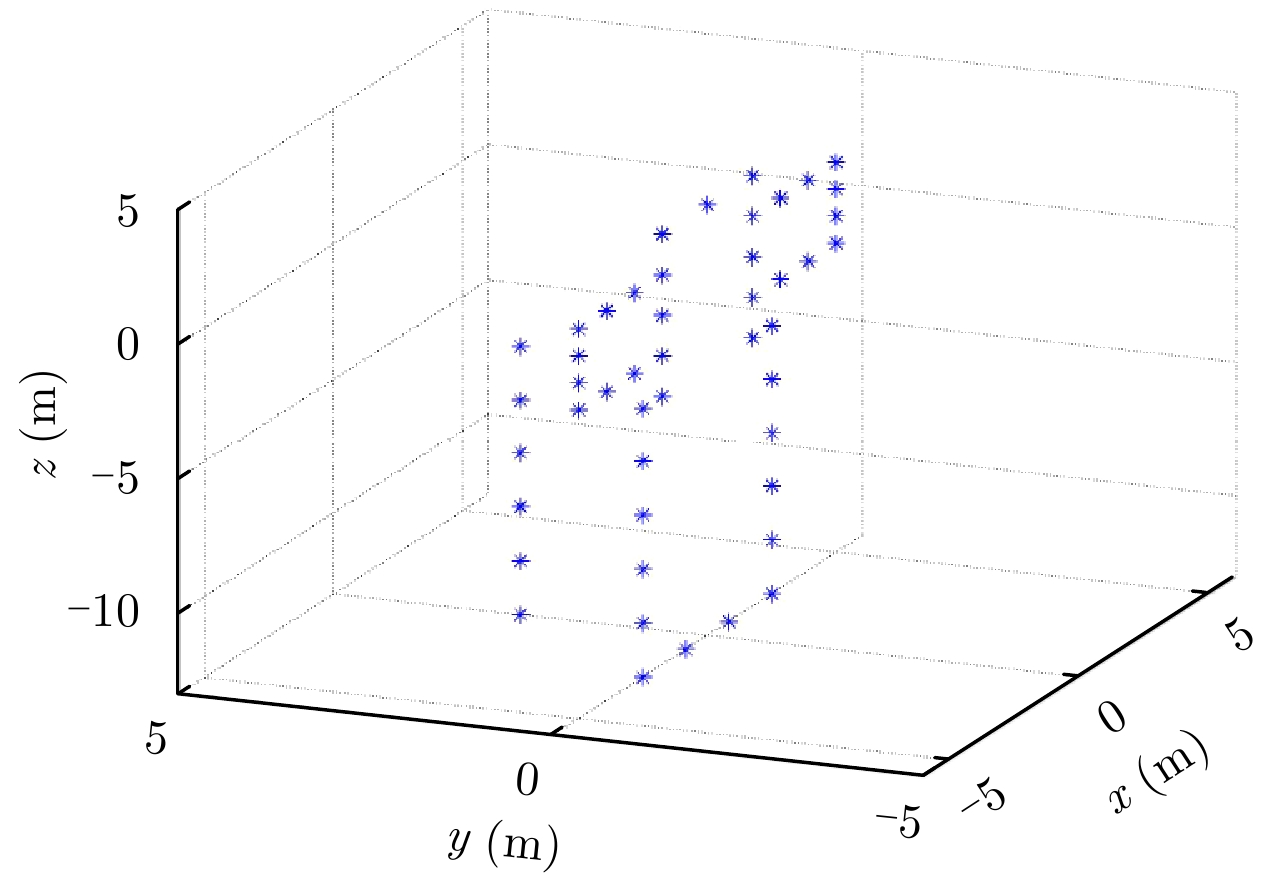
图 12 基于波程差补偿配准方法得到的干涉3维成像结果
Figure 12. InISAR imaging result through the proposed method
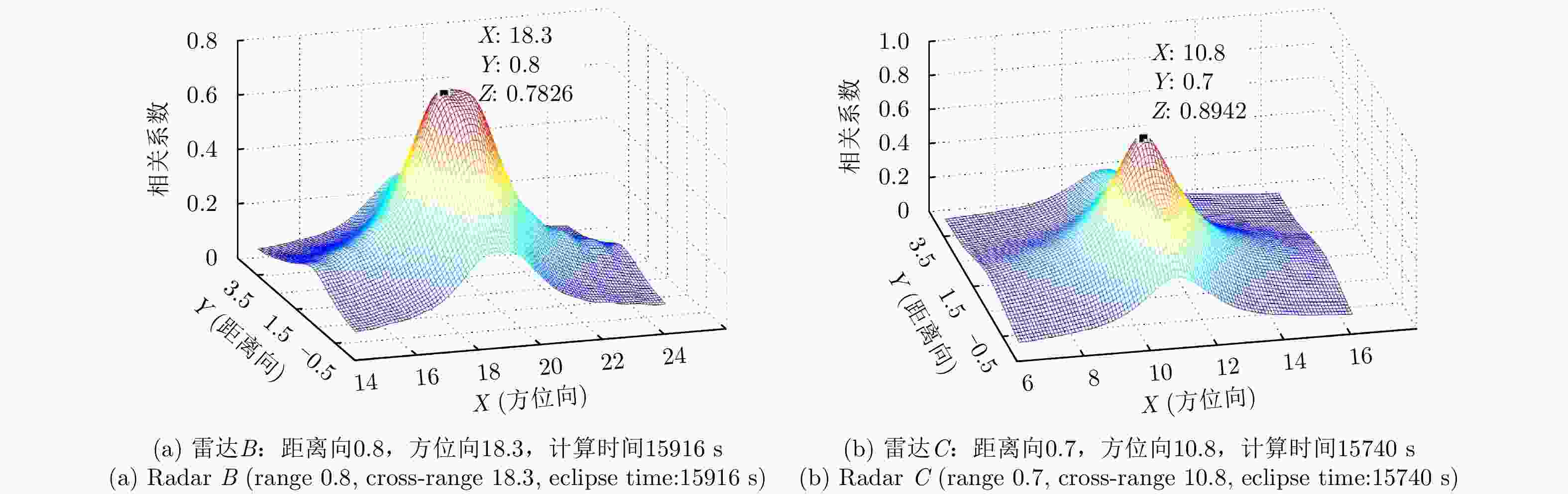
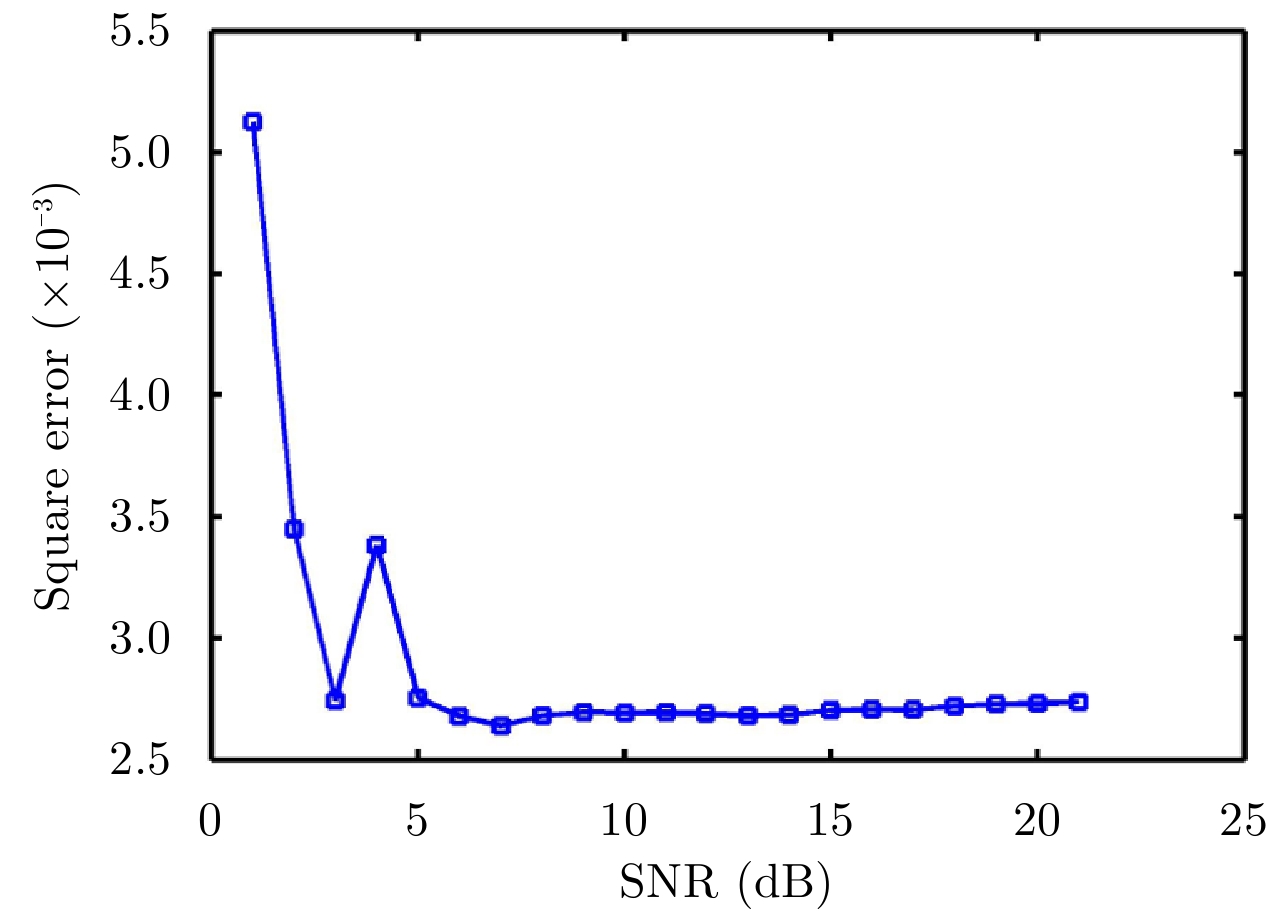
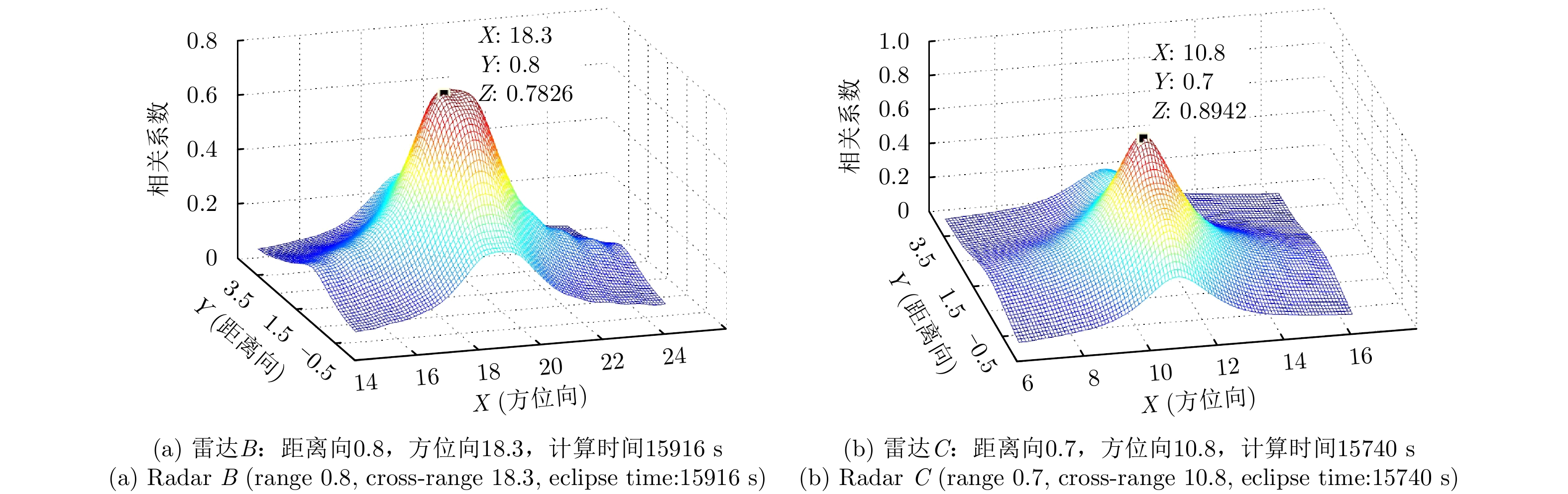
图 13 图像配准过程中相关系数分布
Figure 13. Distribution of correlation coefficients during registration
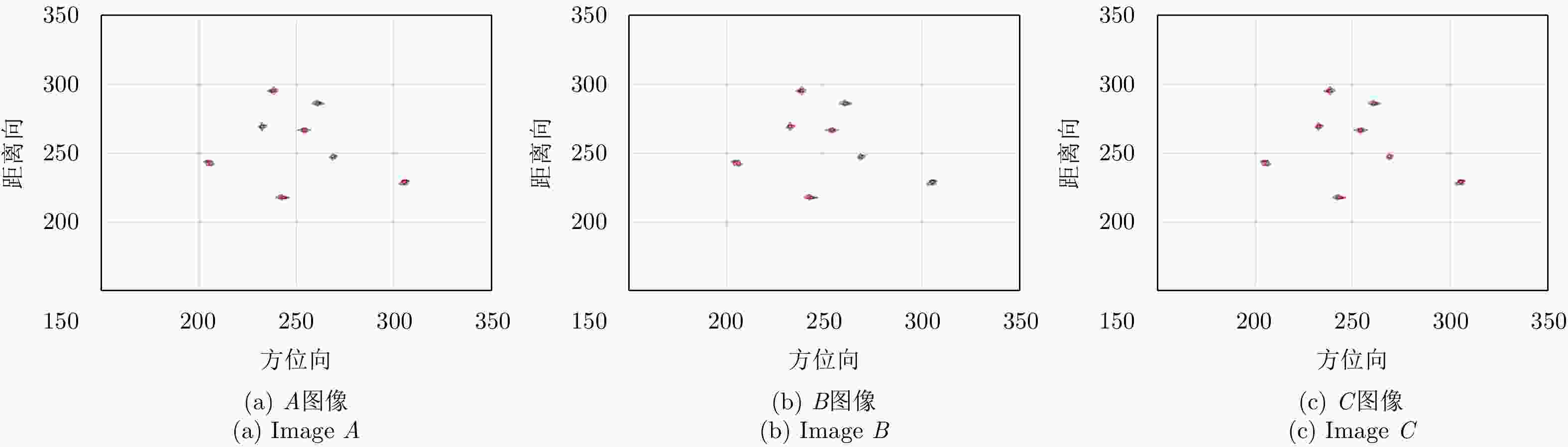
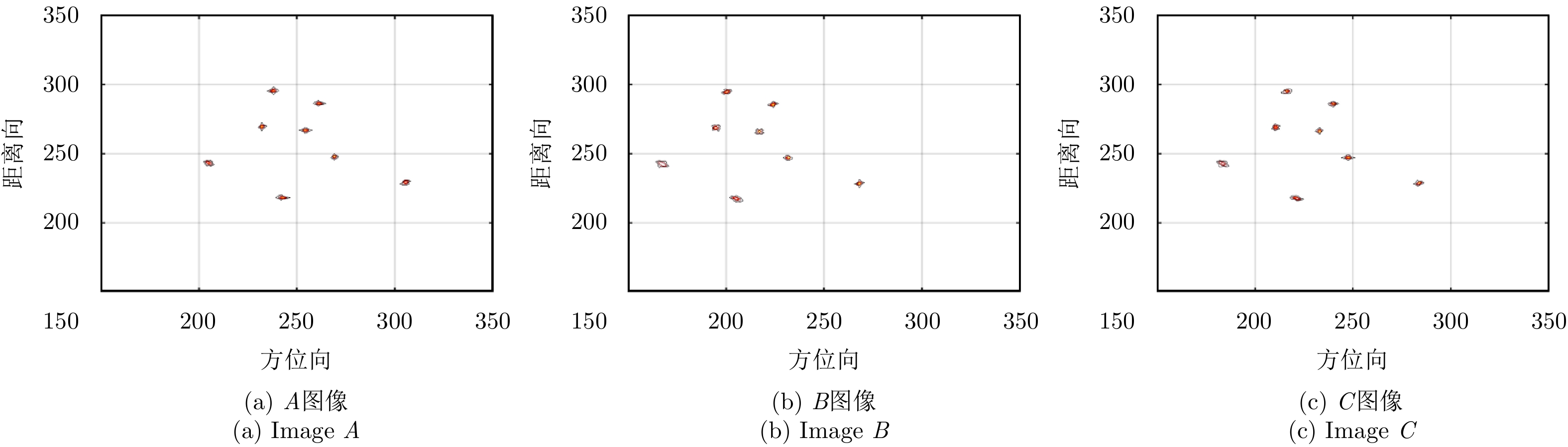
图 14 相关法配准之后的ISAR图像
Figure 14. ISAR image after registration based on correlation coefficient
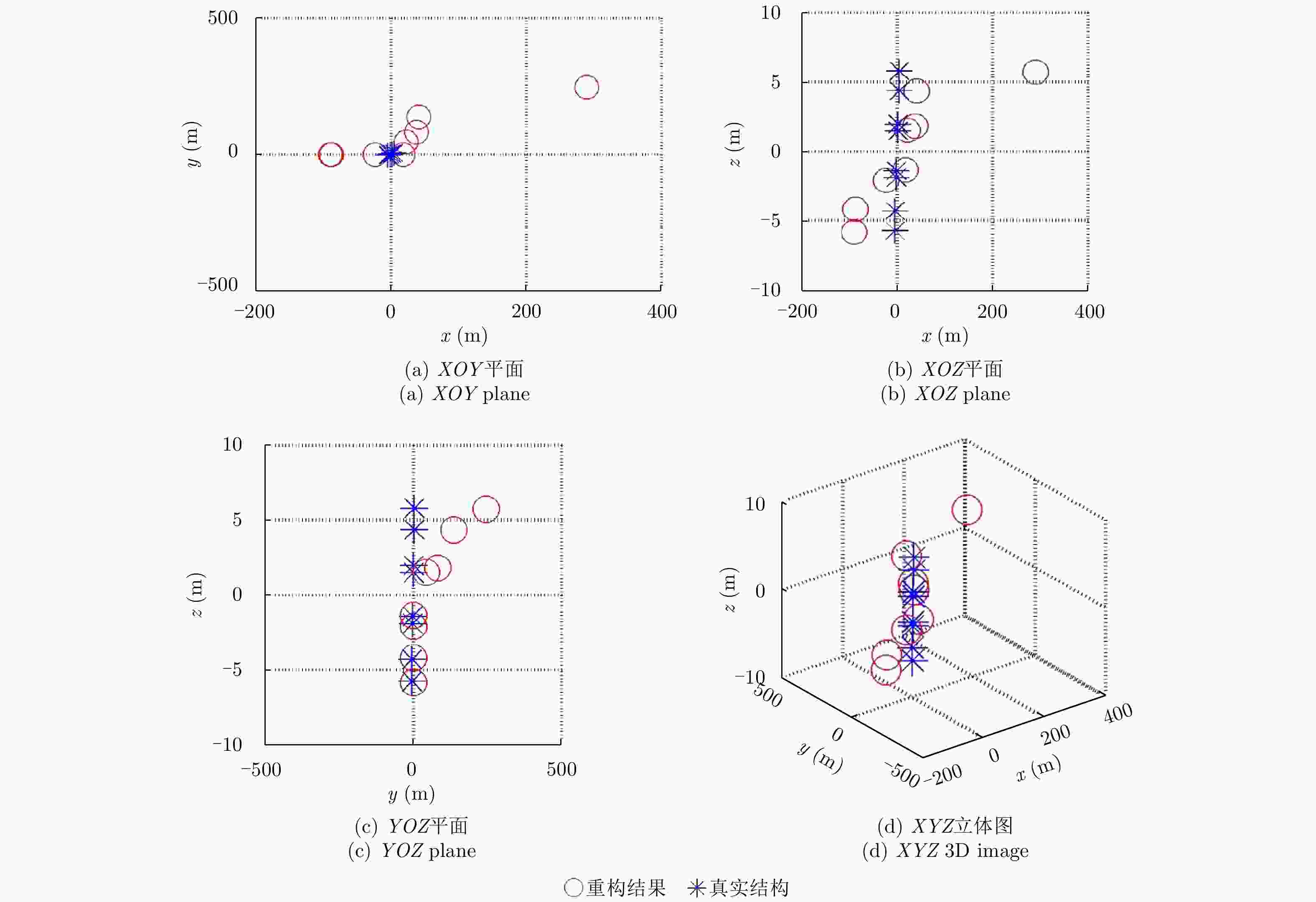
图 15 基于相关法图像配准最终3维成像结果
Figure 15. InISAR imaging result through the method based on correlation efficient
表 1 雷达和目标的参数
Table 1. Parameters of experiment
雷达参数 数值 目标参数 数值 信号载频fc 10 GHz 散射点数 8 信号带宽BW 1 GHz 目标高度 100 km 距离分辨率 0.15 m 转动角速度 0.0112 rad/s 脉冲时宽Tp 0.1 ms 最大尺寸 5.7 m 脉冲重复频率PRF 100 Hz 脉冲数量 500  下载: 导出CSV
下载: 导出CSV
表 2 基于波程差补偿方法配准的ISAR图像中各散射点位置
Table 2. Locations of scatterers after image registration based on the proposed method
散射点标号 天线A 天线B 天线C 1 (247,218) (247,218) (247,218) 2 (279,229) (279,229) (279,229) 3 (229,243) (229,243) (229,243) 4 (260,248) (260,248) (260,248) 5 (253,267) (253,267) (253,267) 6 (242,269) (242,269) (242,269) 7 (256,286) (256,286) (256,286) 8 (244,295) (244,295) (244,295)
下载: 导出CSV
表 3 相关法配准之后ISAR图像中各散射点位置
Table 3. Locations of scatterers after image registration based on correlation method
散射点标号 A图像 B图像 C图像 1 (247,218) (246,218) (247,218) 2 (279,229) (278,229) (278,230) 3 (229,243) (229,243) (229,243) 4 (260,248) (260,247) (260,248) 5 (253,267) (252,266) (253,267) 6 (242,269) (242,269) (241,270) 7 (256,286) (256,286) (256,286) 8 (244,295) (243,295) (244,295)
下载: 导出CSV
-
[1] Xing M, Wu R, and Bao Z. High resolution ISAR imaging of high speed moving targets[J]. IEE Proceedings-Radar,Sonar and Navigation, 2005, 152(2): 58–67. DOI: 10.1049/ip-rsn:20045084 [2] Chen C C and Andrews H C. Target-motion-induced radar imaging[J]. IEEE Transactions on Aerospace and Electronic Systems, 1980, AES-16(1): 2–14. DOI: 10.1109/TAES.1980.308873 [3] Martorella M, Stagliano D, Salvetti F, et al. 3D interferometric ISAR imaging of noncooperative targets[J]. IEEE Transactions on Aerospace and Electronic Systems, 2014, 50(4): 3102–3114. DOI: 10.1109/TAES.2014.130210 [4] Tian B, Li N, Liu Y, et al.. A novel image registration method for InISAR imaging system[C]. Proceedings of SPIE 9252, Millimetre Wave and Terahertz Sensors and Technology VII, Amsterdam, Netherlands, 2014: 92520U. [5] Tian B, Zou J W, Xu S Y, et al. Squint model interferometric ISAR imaging based on respective reference range selection and squint iteration improvement[J]. IET Radar,Sonar&Navigation, 2015, 9(9): 1366–1375. DOI: 10.1049/iet-rsn.2015.0195 [6] Nasirian M and Bastani M H. A novel model for three-dimensional imaging using interferometric ISAR in any curved target flight path[J]. IEEE Transactions on Geoscience and Remote Sensing, 2014, 52(6): 3236–3245. DOI: 10.1109/TGRS.2013.2271875 [7] 王俊, 文亚亚, 禹娟, 等. 一种基于运动目标ISAR像序列的三维重构方法[J]. 系统仿真学报, 2013, 25(4): 809–816. DOI: 10.16182/j.cnki.joss.2013.04.040Wang Jun, Wen Ya-ya, Yu Juan, et al. Three dimensional reconstruction method for moving target from ISAR sequences[J]. Journal of System Simulation, 2013, 25(4): 809–816. DOI: 10.16182/j.cnki.joss.2013.04.040 [8] Staglianò D, Lischi S, Massini R, et al.. Soft 3D-ISAR image reconstruction using a dual interferometric radar[C]. 2015 IEEE Radar Conference (RadarCon), Arlington, VA, USA, 2015: 572–576. DOI: 10.1109/RADAR.2015.7131063. [9] Wu W Z, Hu P J, Xu S Y, et al. Image registration for InISAR based on joint translational motion compensation[J]. IET Radar,Sonar&Navigation, 2017, 11(10): 1597–1603. DOI: 10.1049/iet-rsn.2017.0140 [10] 王青松, 瞿继双, 黄海风, 等. 联合实、复相关函数的干涉SAR图像配准方法[J]. 测绘学报, 2012, 41(4): 563–569Wang Qingsong, Qu Jishuang, Huang Haifeng, et al. A method based on integrating real and complex correlation function for InSAR image coregistration[J]. Acta Geodaetica et Cartographica Sinica, 2012, 41(4): 563–569 [11] 曾琪明, 解学通. 基于谱运算的复相关函数法在干涉复图像配准中的应用[J]. 测绘学报, 2004, 33(2): 127–131. DOI: 10.3321/j.issn:1001-1595.2004.02.007Zeng Qi-ming and Xie Xue-tong. A FFT-based complex correlation function method applied to interferometric complex image corregistration[J]. Acta Geodaetica et Cartographica Sinica, 2004, 33(2): 127–131. DOI: 10.3321/j.issn:1001-1595.2004.02.007 [12] Stone H S, Orchard M T, Chang E C, et al. A fast direct Fourier-based algorithm for subpixel registration of images[J]. IEEE Transactions on Geoscience and Remote Sensing, 2001, 39(10): 2235–2243. DOI: 10.1109/36.957286 [13] 刘承兰, 高勋章, 贺峰, 等. 一种基于相位校正的InISAR图像配准新方法[J]. 国防科技大学学报, 2011, 35(5): 116–122. DOI: 10.3969/j.issn.1001-2486.2011.05.022Liu Cheng-lan, Gao Xun-zhang, He Feng, et al. A novel method for image registration in InISAR imaging based on phase correction[J]. Journal of National University of Defense Technology, 2011, 35(5): 116–122. DOI: 10.3969/j.issn.1001-2486.2011.05.022 [14] Zhang Q, Yeo T S, Du G, et al. Estimation of three-dimensional motion parameters in interferometric ISAR imaging[J]. IEEE Transactions on Geoscience and Remote Sensing, 2004, 42(2): 292–300. DOI: 10.1109/TGRS.2003.815669 -







计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

