
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公2017年 6卷 第6期
 上一期
上一期
 摘要
摘要 2316KB
2316KB空时自适应处理(Space Time Adaptive Processing, STAP)技术通过空域和时域2维联合自适应滤波的方式,实现了机载雷达对强杂波与干扰的有效抑制。作为提升机载雷达性能的一项关键技术,近年来备受雷达领域的关注与世界军事强国的重视。该文从方法、实验系统和应用3个方面回顾了空时自适应处理技术的发展过程和研究现状,着重阐述了其发展过程中遇到的关键技术问题,介绍了STAP技术在装备上的应用情况,并讨论了下一步的发展趋势,提出了需要或值得进一步研究的方向。
空时自适应处理(Space Time Adaptive Processing, STAP)技术通过空域和时域2维联合自适应滤波的方式,实现了机载雷达对强杂波与干扰的有效抑制。作为提升机载雷达性能的一项关键技术,近年来备受雷达领域的关注与世界军事强国的重视。该文从方法、实验系统和应用3个方面回顾了空时自适应处理技术的发展过程和研究现状,着重阐述了其发展过程中遇到的关键技术问题,介绍了STAP技术在装备上的应用情况,并讨论了下一步的发展趋势,提出了需要或值得进一步研究的方向。
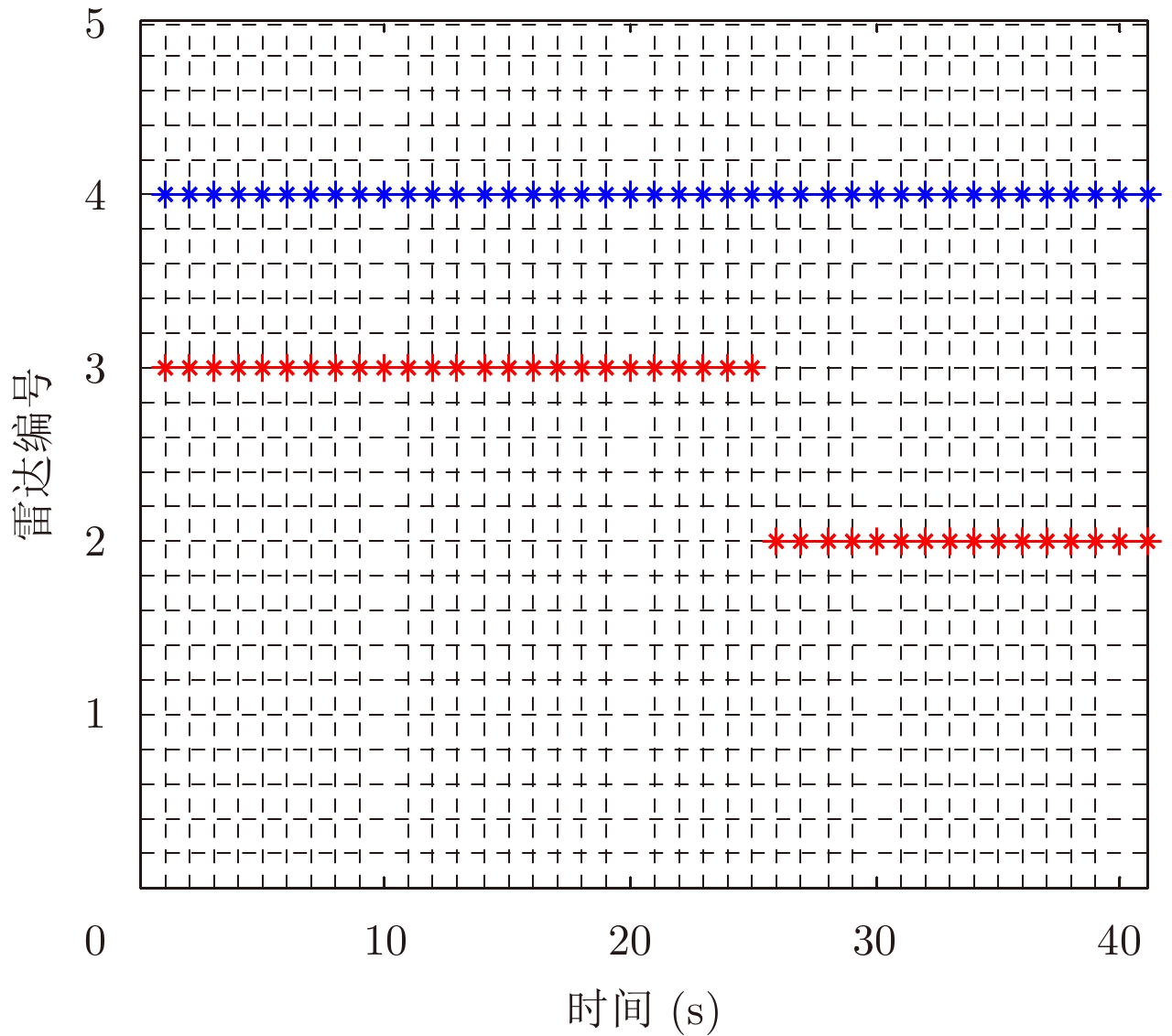
在现代战争中,战场环境复杂多变,为适应战场探测资源动态组织,基于信息熵,该文提出了定量度量多雷达联合观测获得目标信息量多少的方法,并给出了该信息量的下界。进而,基于最小化每个时刻多雷达观测获得的目标信息熵下界,提出了一种自适应选取信息含量高的雷达进行目标跟踪的方法。仿真结果表明,相比不采用信息熵的跟踪方法,提出的方法具有更高的跟踪精度。
在现代战争中,战场环境复杂多变,为适应战场探测资源动态组织,基于信息熵,该文提出了定量度量多雷达联合观测获得目标信息量多少的方法,并给出了该信息量的下界。进而,基于最小化每个时刻多雷达观测获得的目标信息熵下界,提出了一种自适应选取信息含量高的雷达进行目标跟踪的方法。仿真结果表明,相比不采用信息熵的跟踪方法,提出的方法具有更高的跟踪精度。



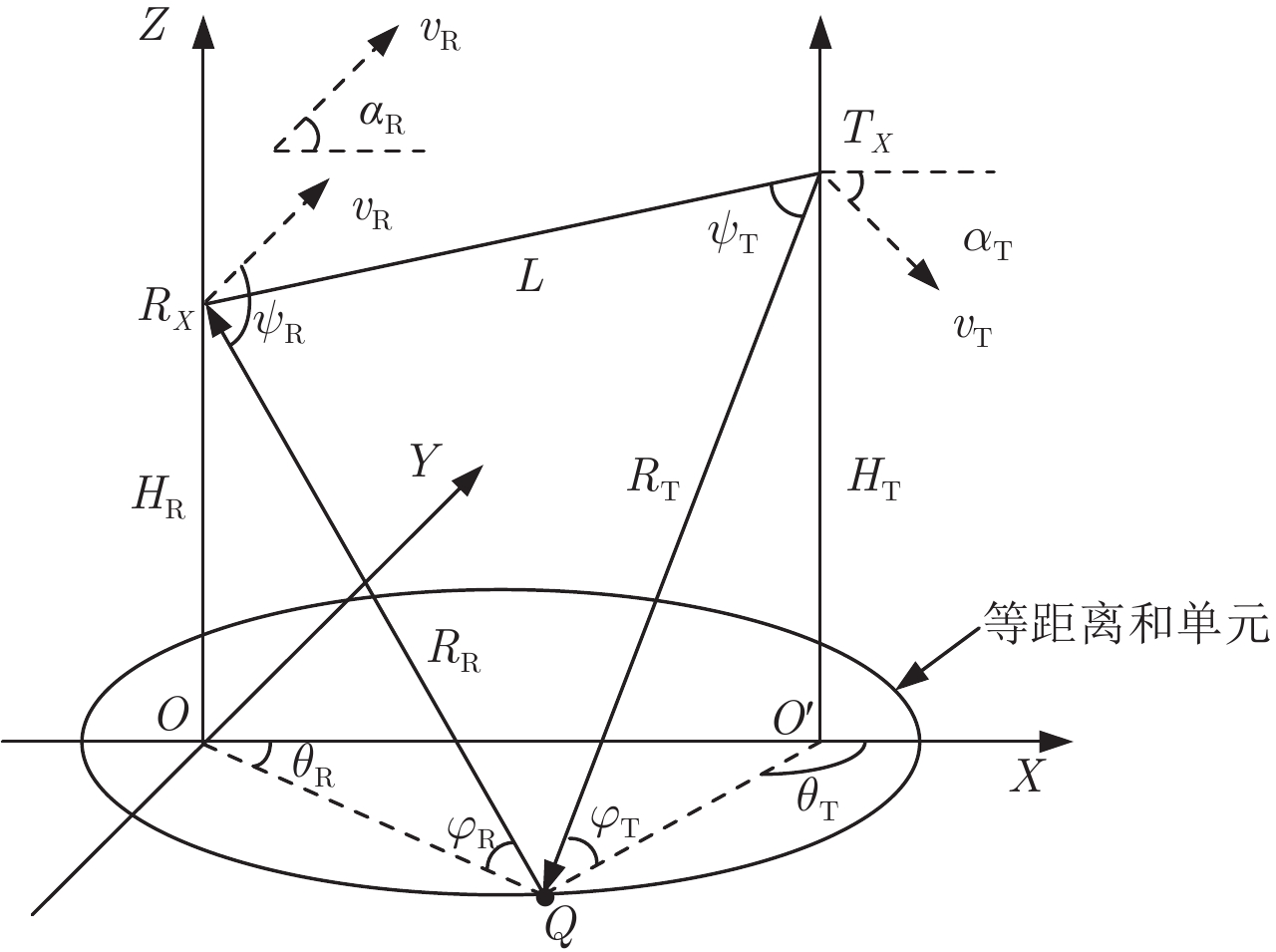
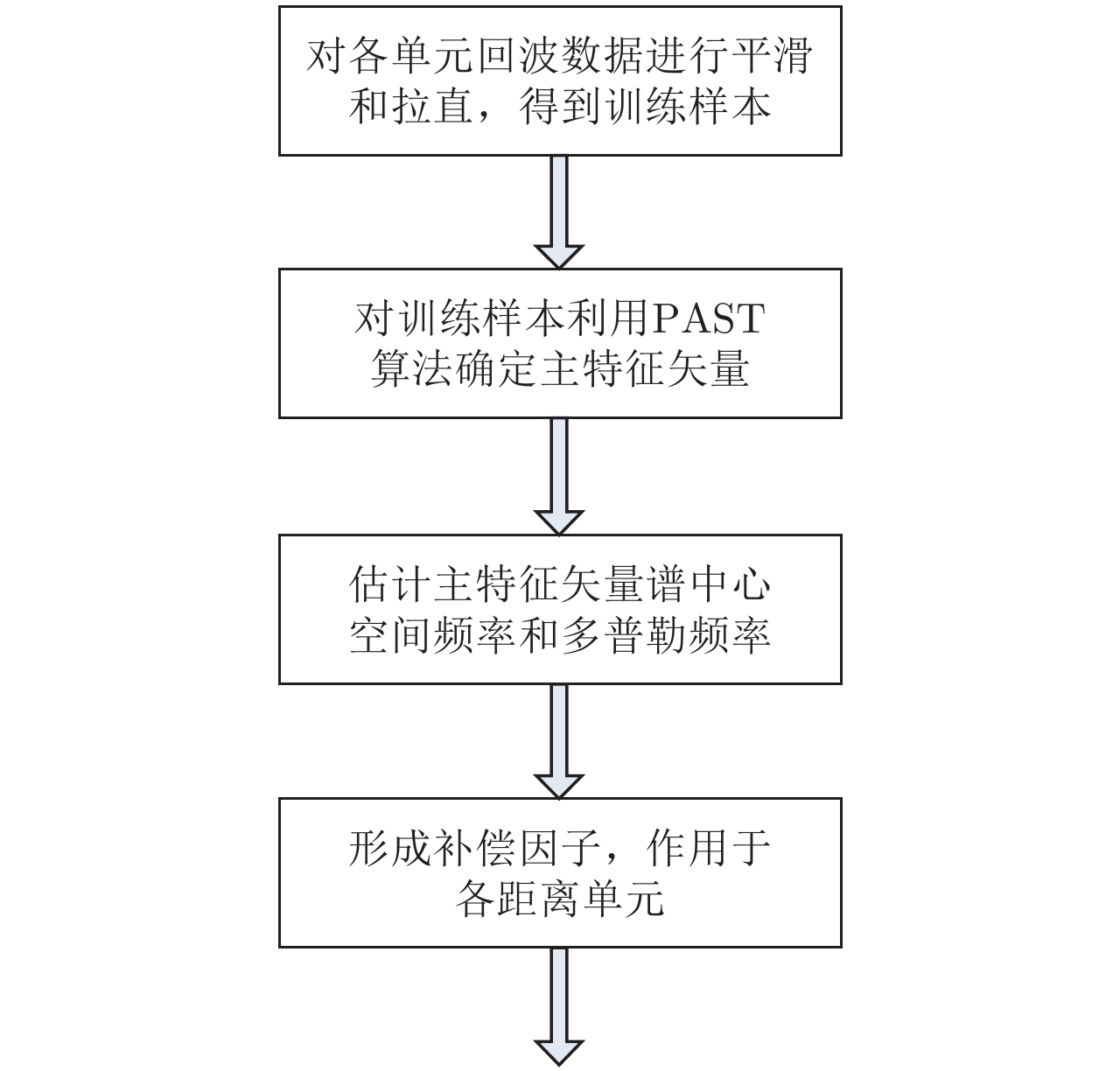
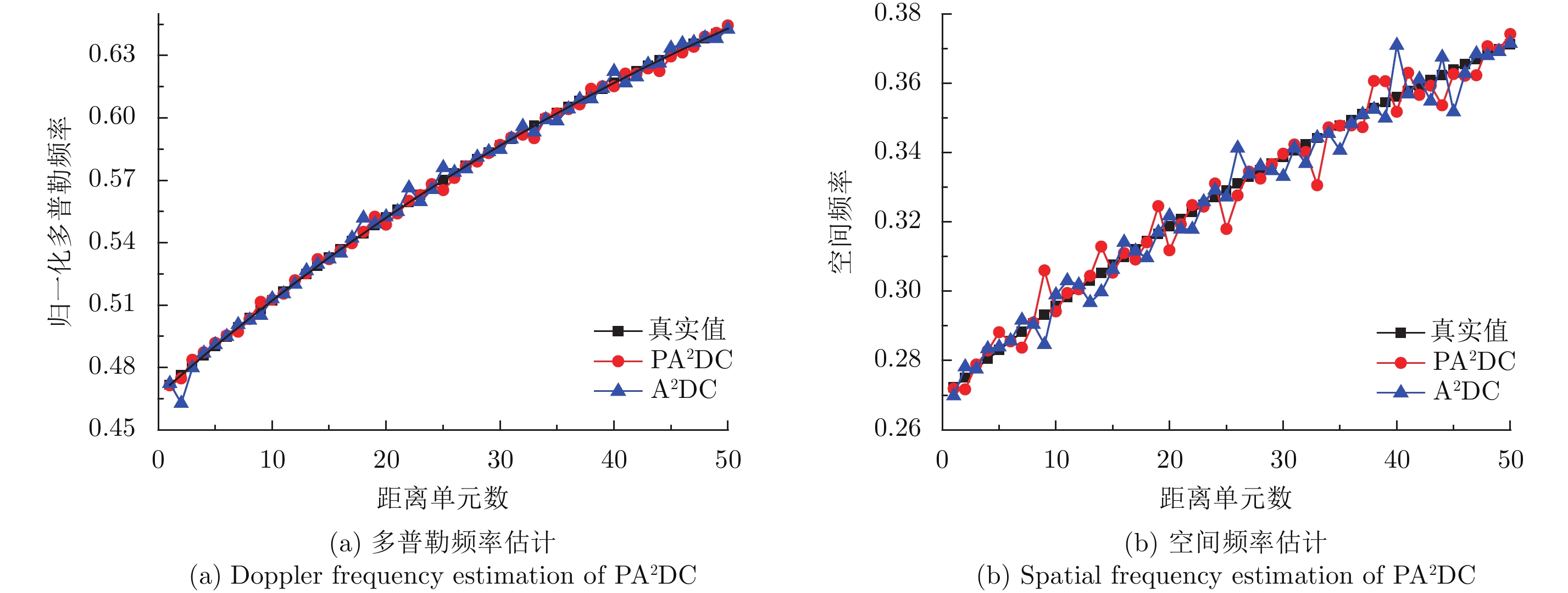
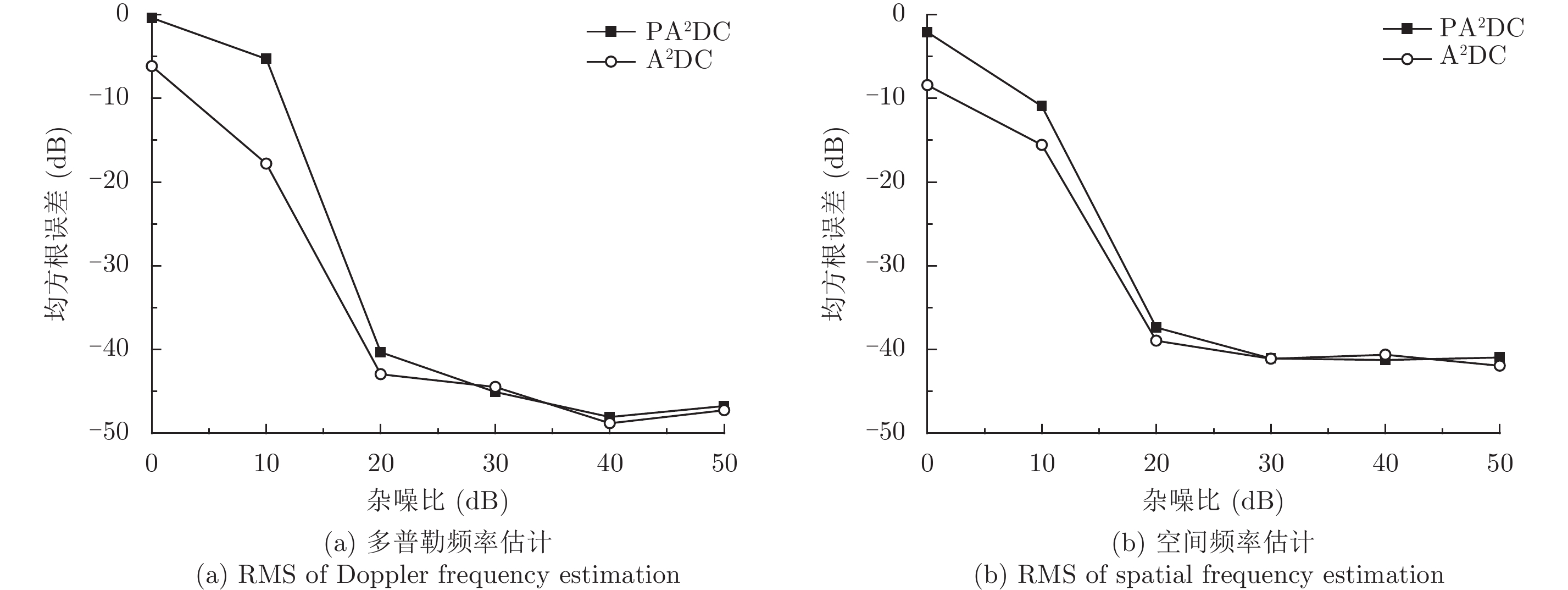
自适应角度-多普勒补偿算法根据样本数据本身来自适应地估计补偿参数,从而避免惯导系统误差造成的补偿性能下降问题,但该算法必须对杂波协方差矩阵进行估计和特征分解,运算量巨大。针对这一问题,该文研究了基于近似投影子空间跟踪(PAST)处理的自适应角度-多普勒补偿算法,该方法先采用循环迭代处理快速估计出各距离单元主特征向量谱中心的位置参数,避免了矩阵特征分解带来的运算负担,然后通过补偿使得各单元的谱中心重合。仿真结果表明,该方法能有效解决机载双基雷达杂波非均匀问题,其性能与基于特征分解算法相当,但运算量显著降低,便于工程实现。
自适应角度-多普勒补偿算法根据样本数据本身来自适应地估计补偿参数,从而避免惯导系统误差造成的补偿性能下降问题,但该算法必须对杂波协方差矩阵进行估计和特征分解,运算量巨大。针对这一问题,该文研究了基于近似投影子空间跟踪(PAST)处理的自适应角度-多普勒补偿算法,该方法先采用循环迭代处理快速估计出各距离单元主特征向量谱中心的位置参数,避免了矩阵特征分解带来的运算负担,然后通过补偿使得各单元的谱中心重合。仿真结果表明,该方法能有效解决机载双基雷达杂波非均匀问题,其性能与基于特征分解算法相当,但运算量显著降低,便于工程实现。




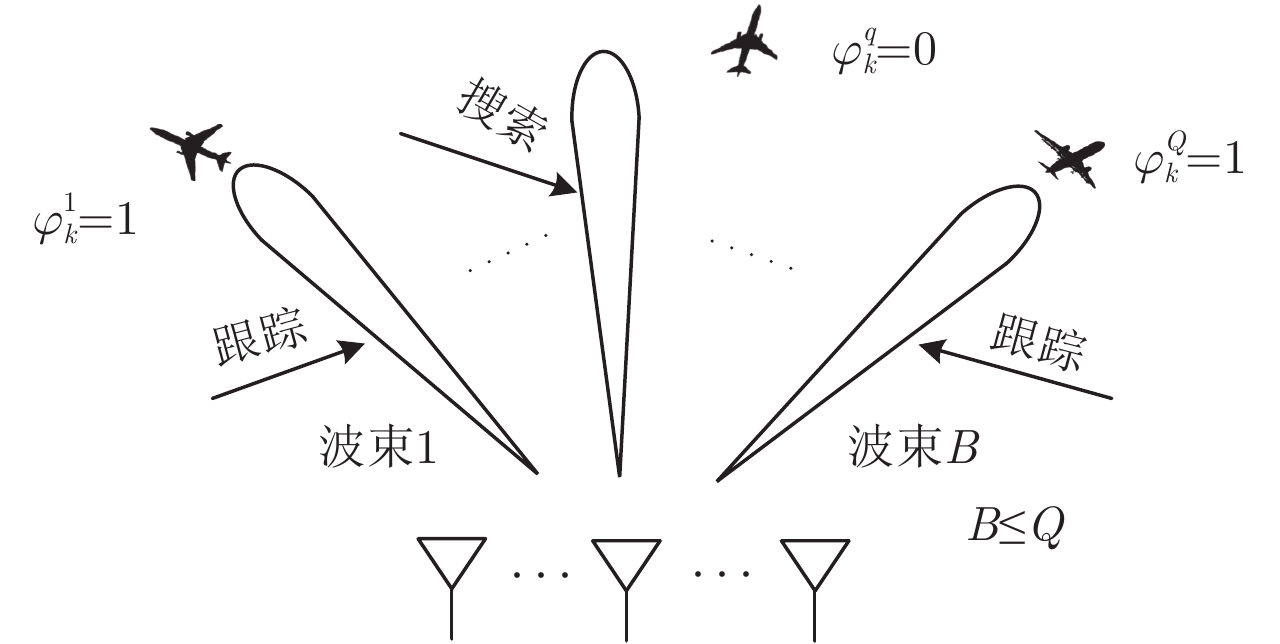
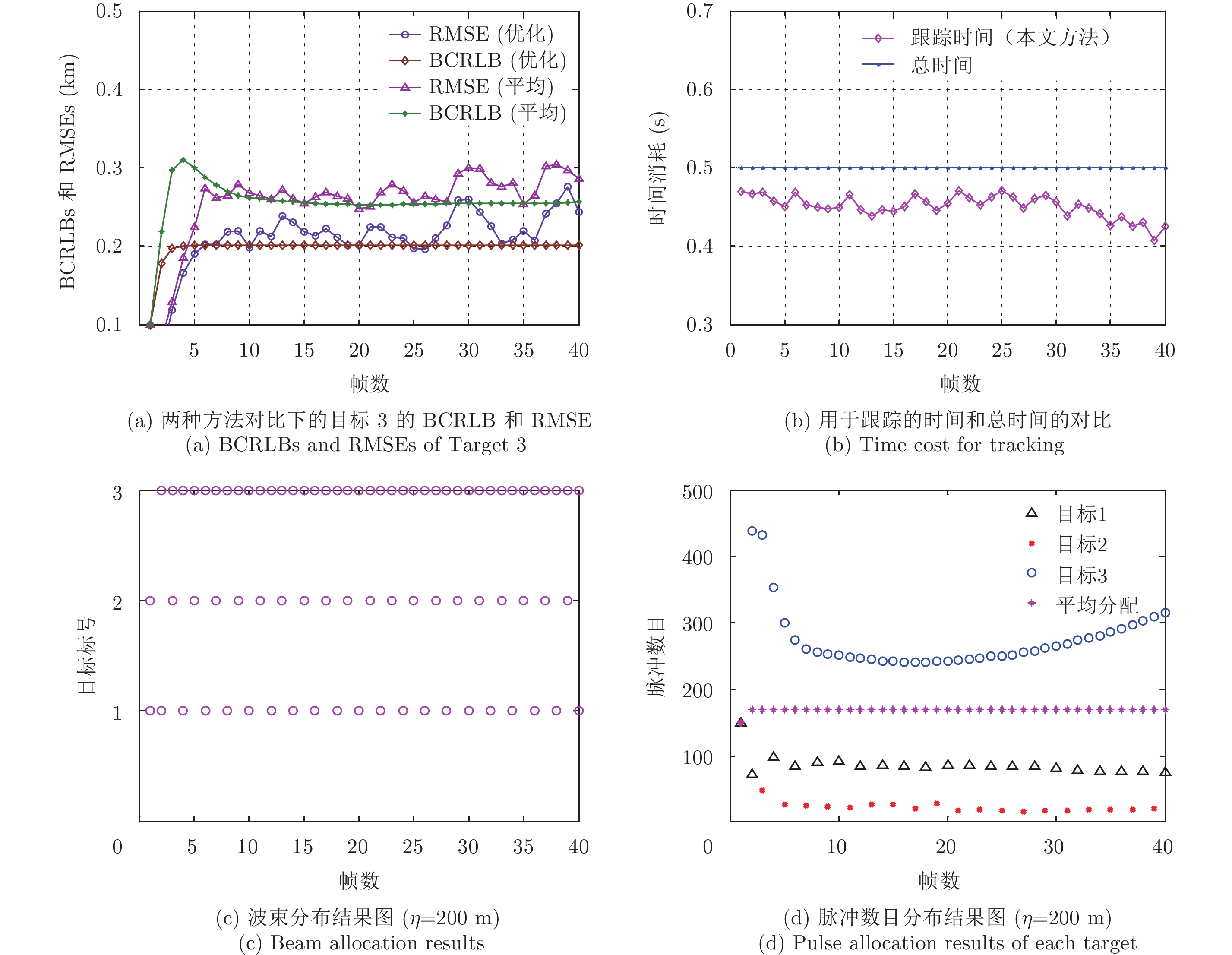
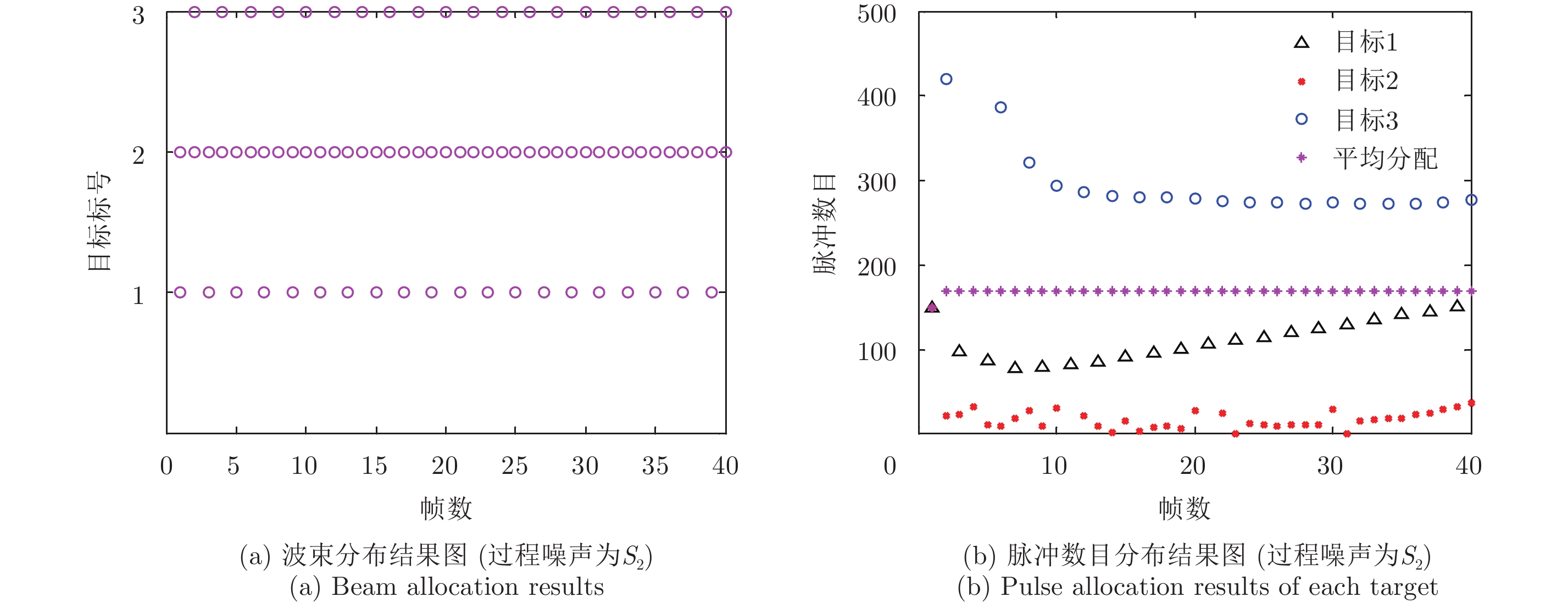
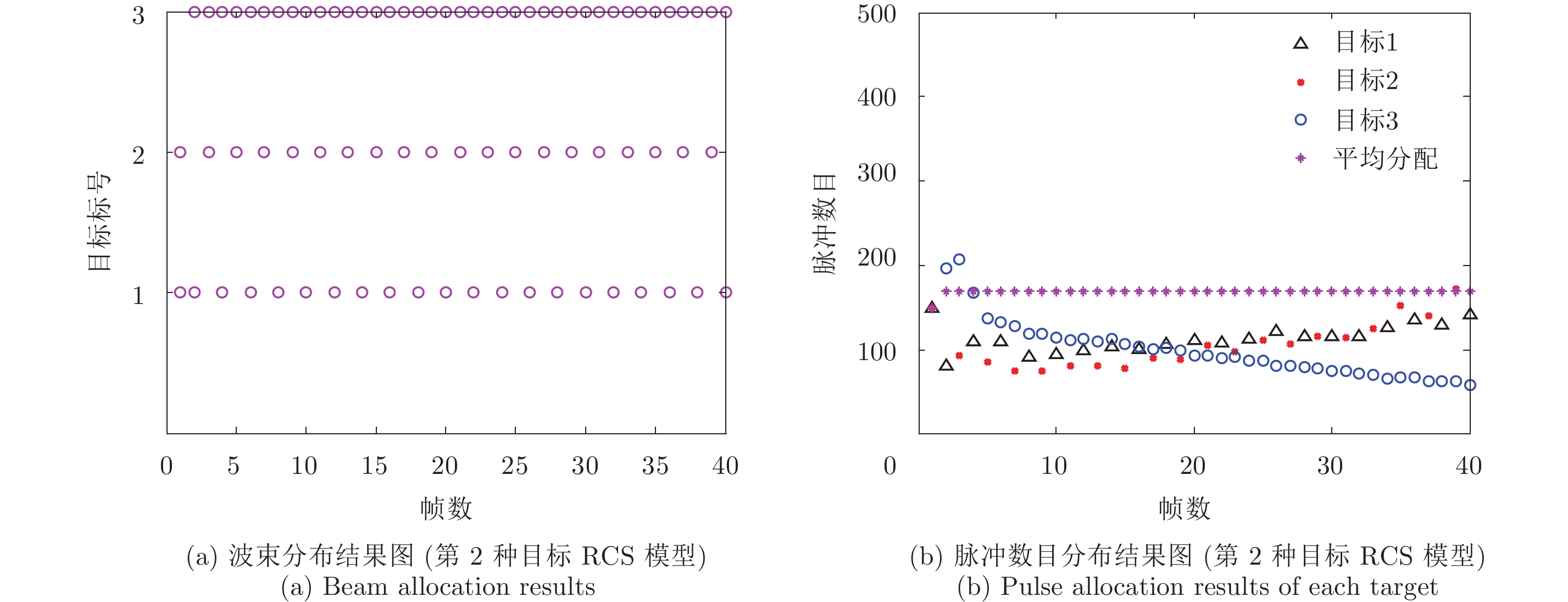
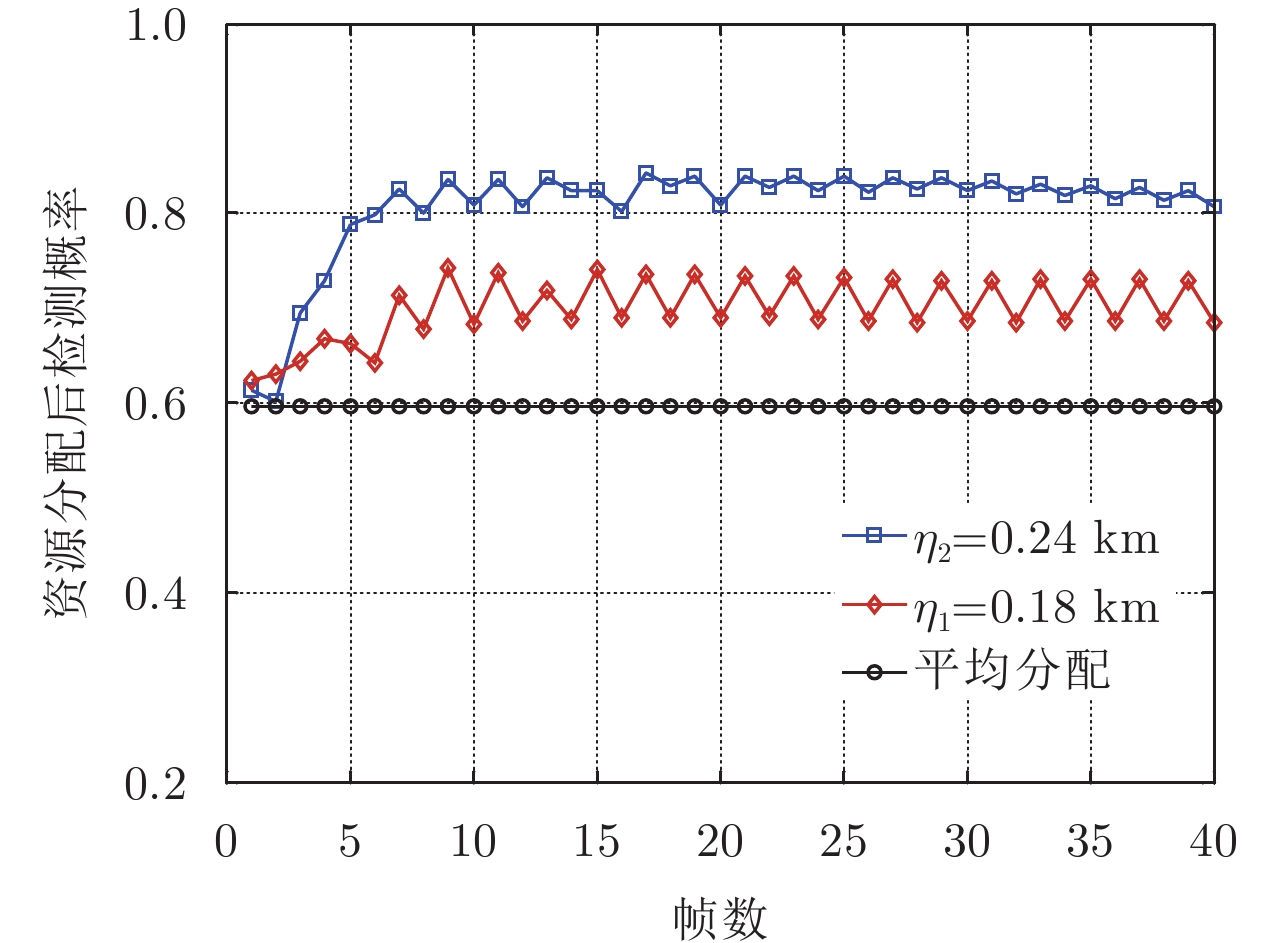
相控阵雷达能同时发射多个波束,其波束指向灵活,且能实现无惯性的快速扫描。为了使相控阵雷达用尽量少的系统资源去实现多个目标的同时跟踪,该文提出了一种基于多目标跟踪的波束和驻留时间联合分配方法。该方法通过建立和求解一个在各目标跟踪精度满足一定要求的前提下,最小化总波束驻留时间的非凸优化数学问题来实现资源的联合分配。贝叶斯克拉美罗界(BCRLB)为目标状态估计的误差提供了一个下界,该文推导了带有资源参数变量的BCRLB并将它作为跟踪性能的准则。随后针对上述非凸优化问题,该文提出一个先确立波束指向再分配驻留时间的两步分解算法。最后,根据资源分配结果,采用粒子滤波算法实现了多目标跟踪。仿真结果证明,和平均分配资源的固定操作方式相比,该文方法不仅能节约系统资源而且能保证坏目标的跟踪性能,体现了该文方法的有效性。
相控阵雷达能同时发射多个波束,其波束指向灵活,且能实现无惯性的快速扫描。为了使相控阵雷达用尽量少的系统资源去实现多个目标的同时跟踪,该文提出了一种基于多目标跟踪的波束和驻留时间联合分配方法。该方法通过建立和求解一个在各目标跟踪精度满足一定要求的前提下,最小化总波束驻留时间的非凸优化数学问题来实现资源的联合分配。贝叶斯克拉美罗界(BCRLB)为目标状态估计的误差提供了一个下界,该文推导了带有资源参数变量的BCRLB并将它作为跟踪性能的准则。随后针对上述非凸优化问题,该文提出一个先确立波束指向再分配驻留时间的两步分解算法。最后,根据资源分配结果,采用粒子滤波算法实现了多目标跟踪。仿真结果证明,和平均分配资源的固定操作方式相比,该文方法不仅能节约系统资源而且能保证坏目标的跟踪性能,体现了该文方法的有效性。


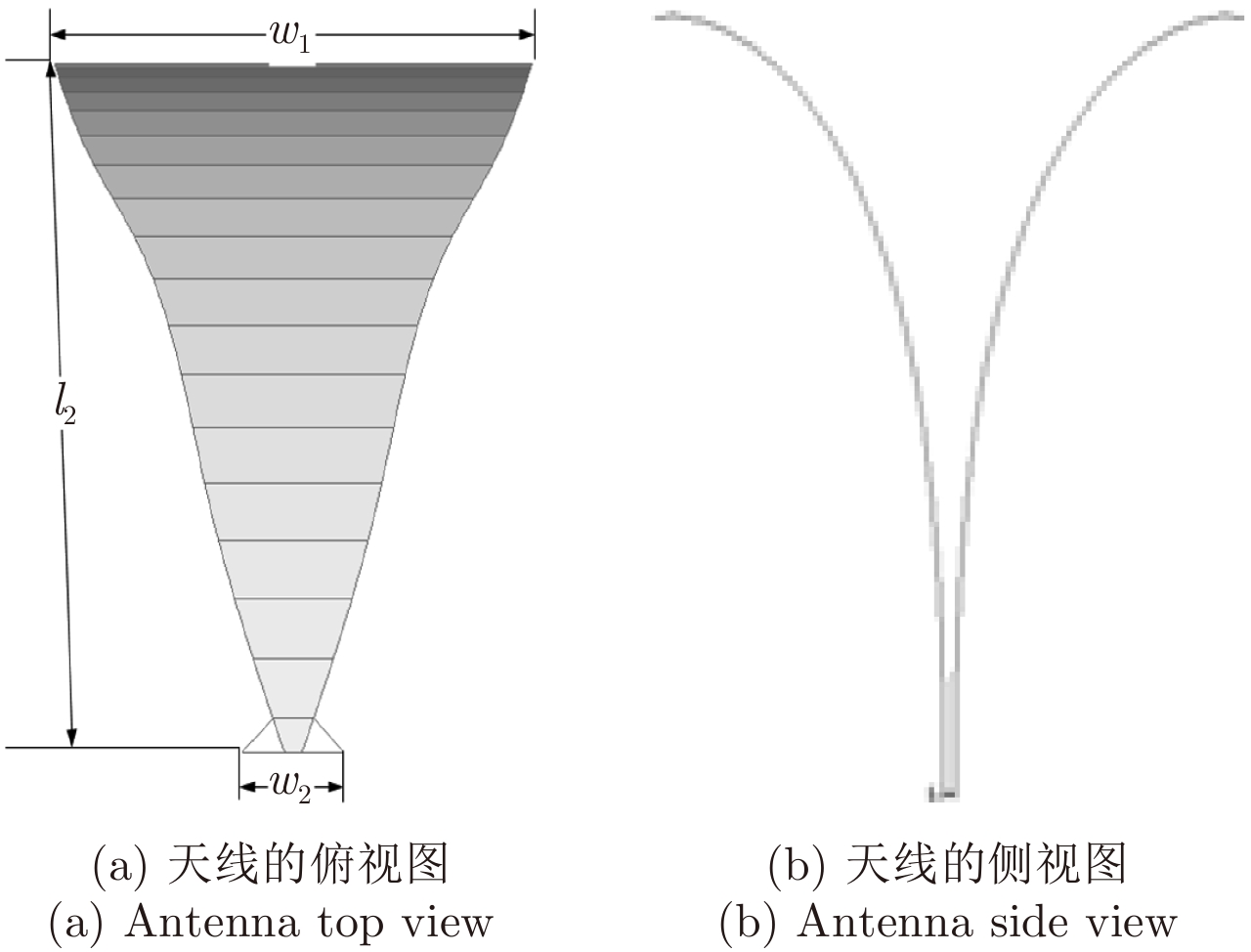
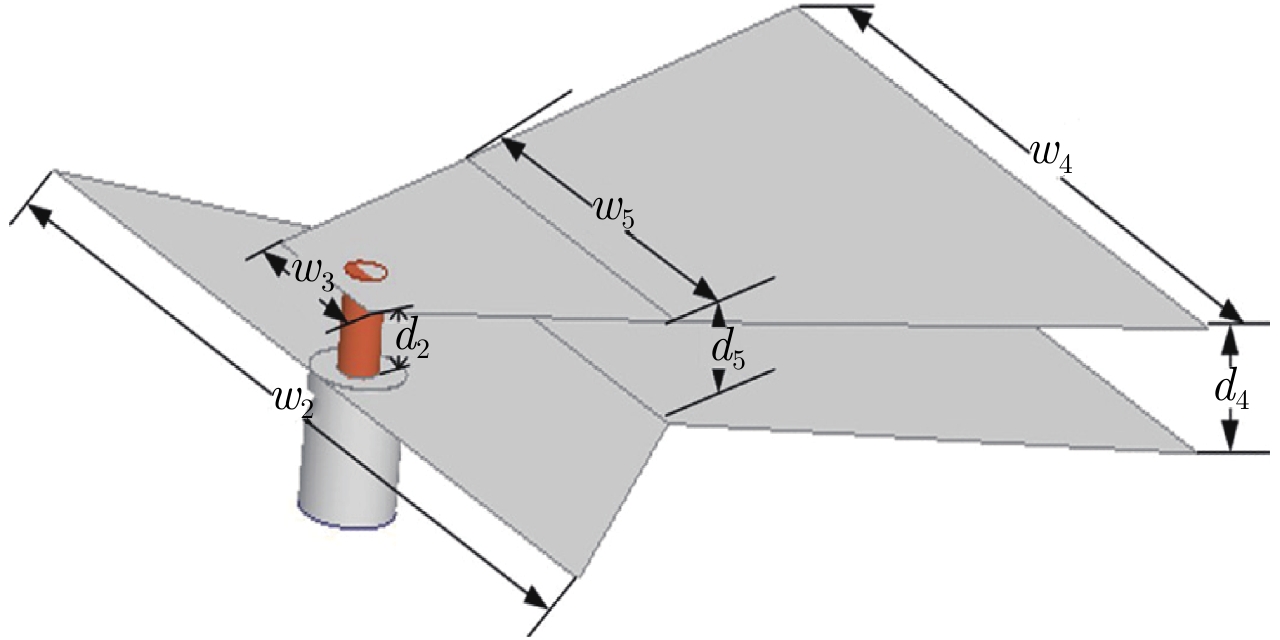
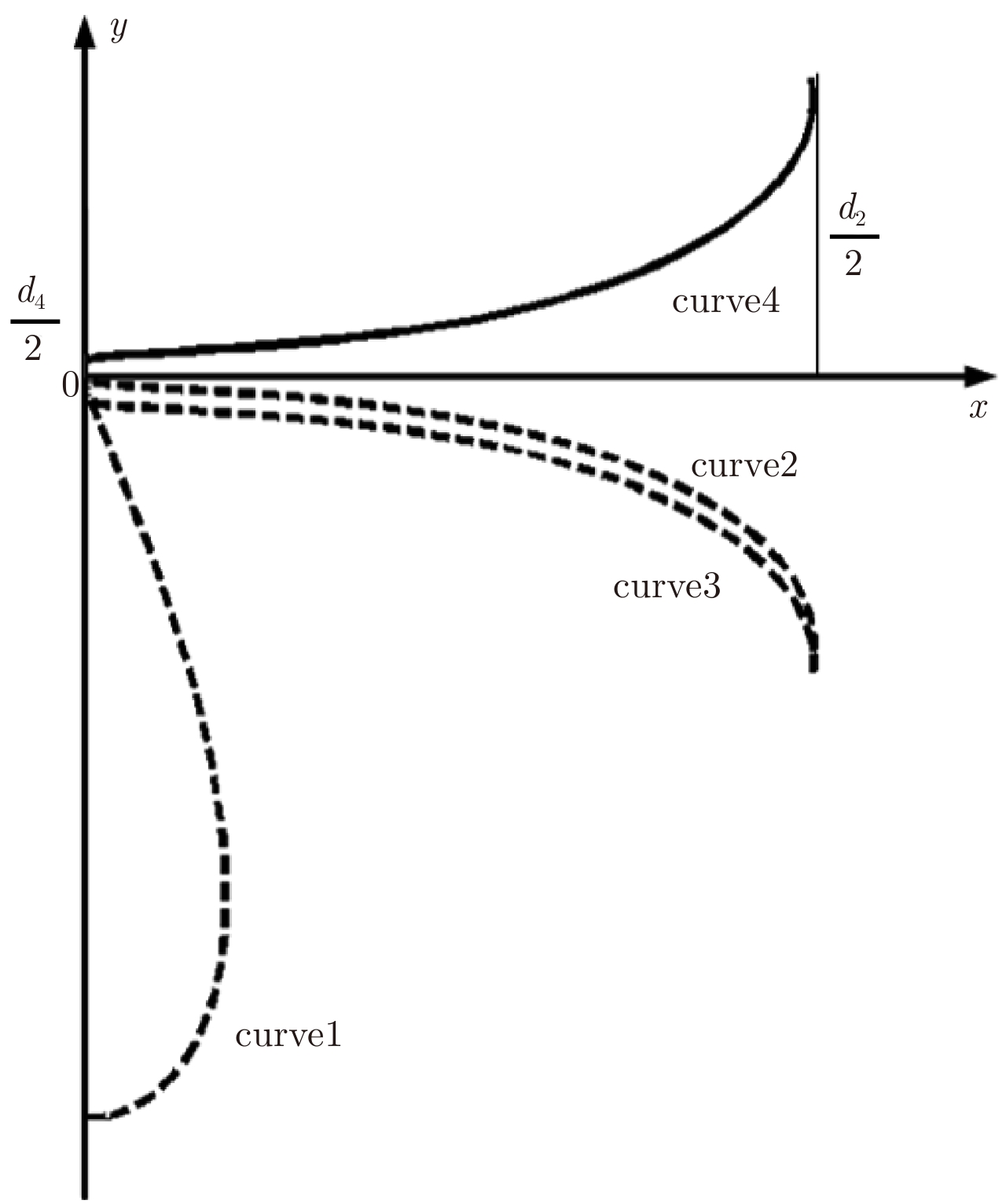
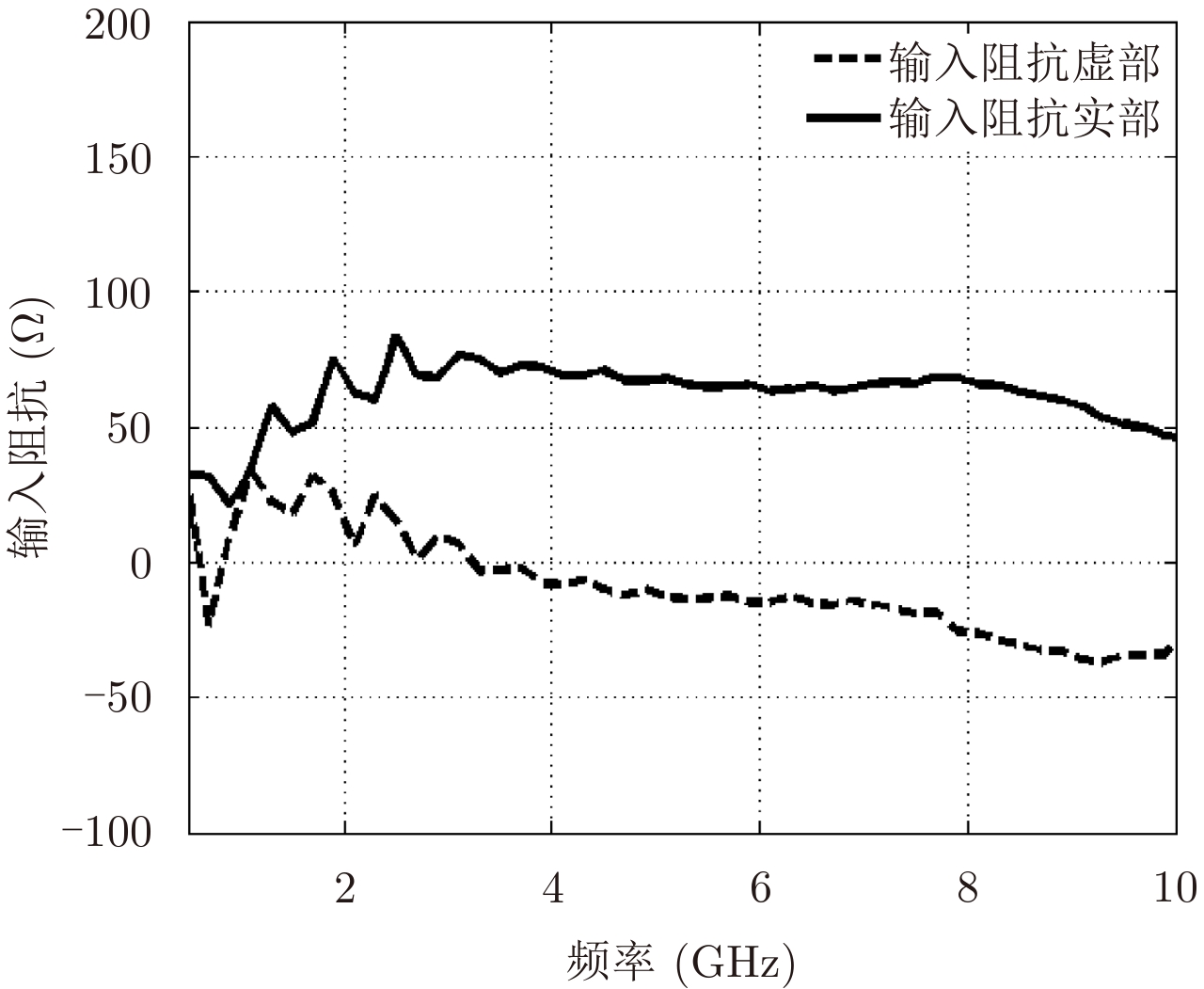
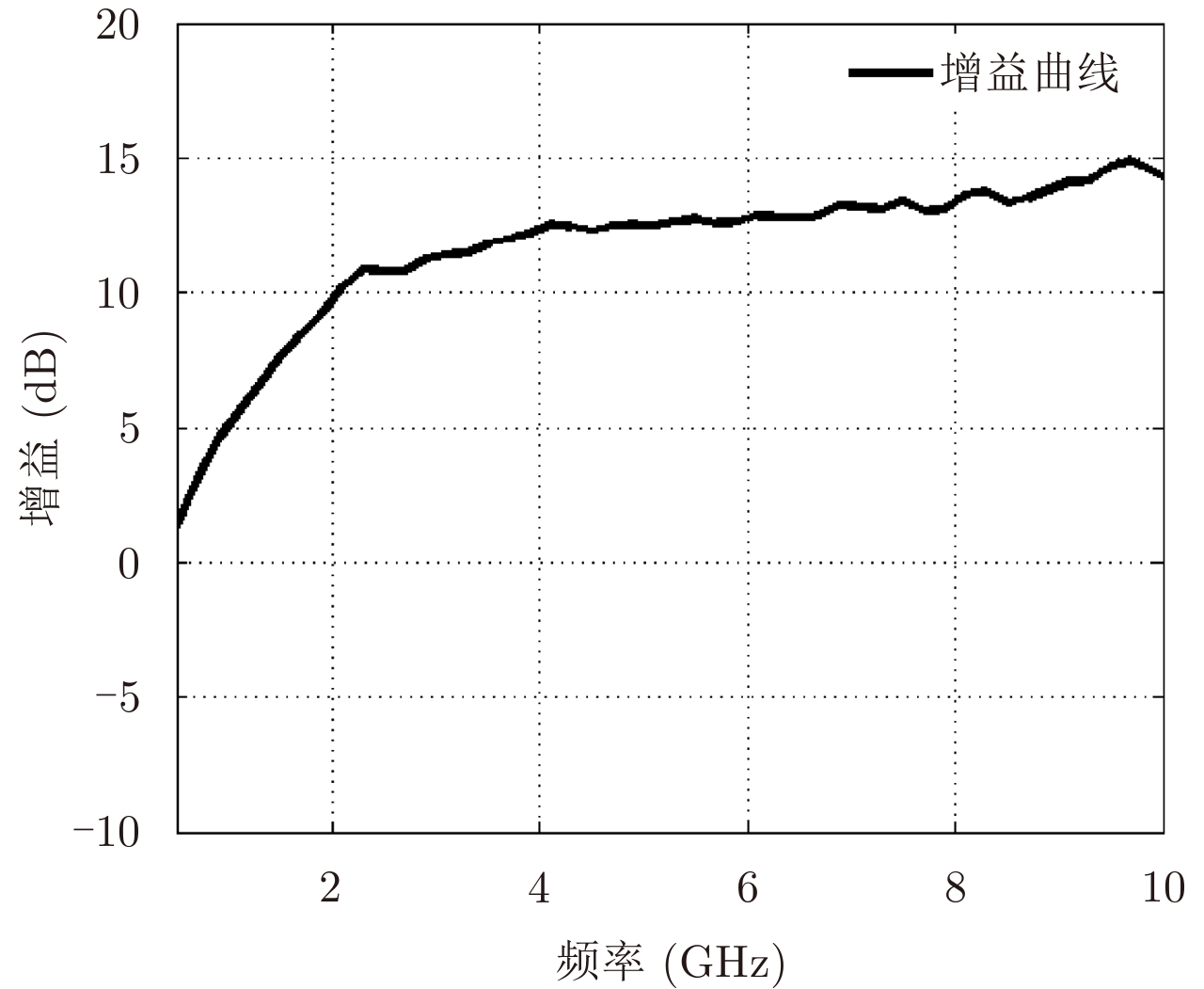
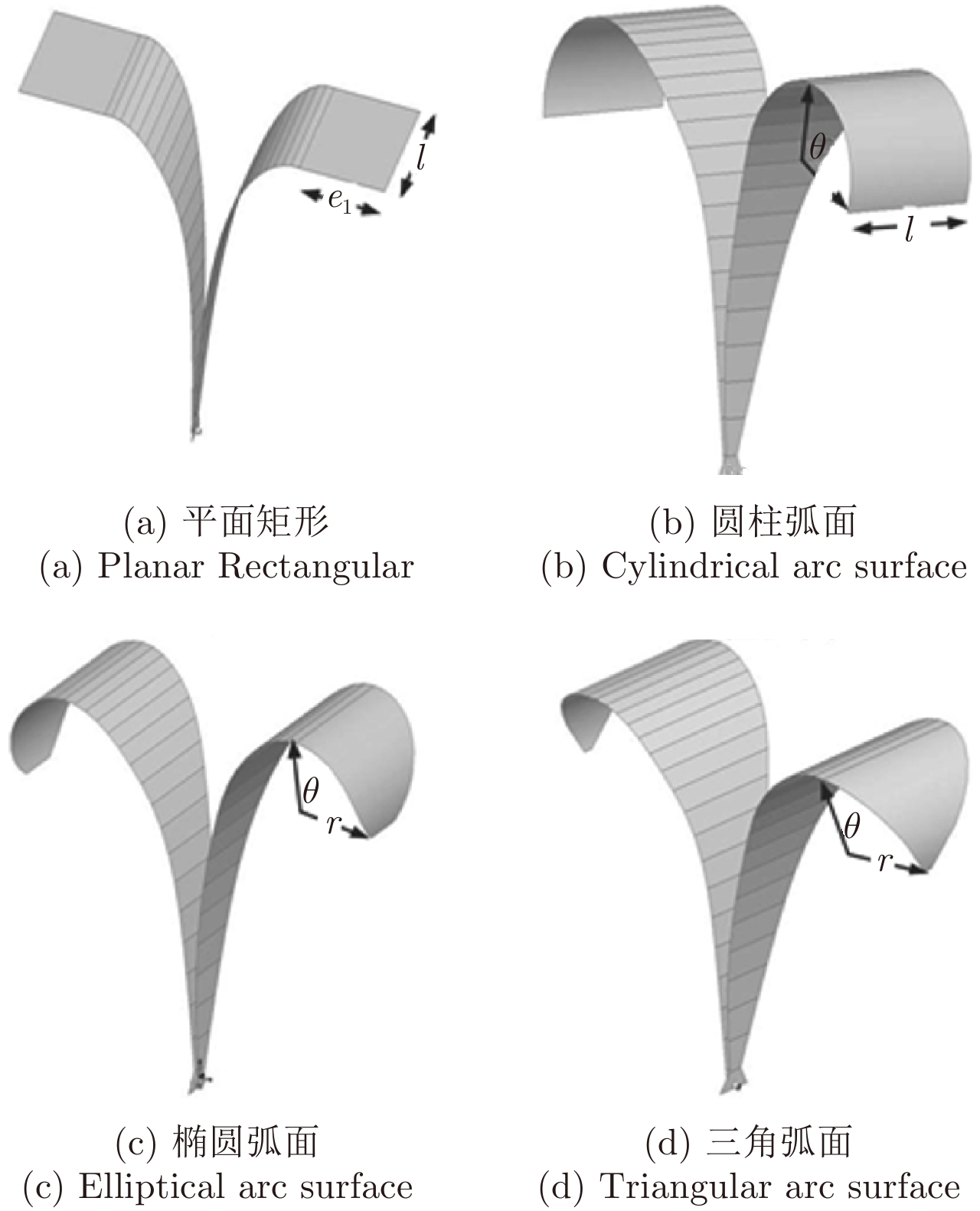
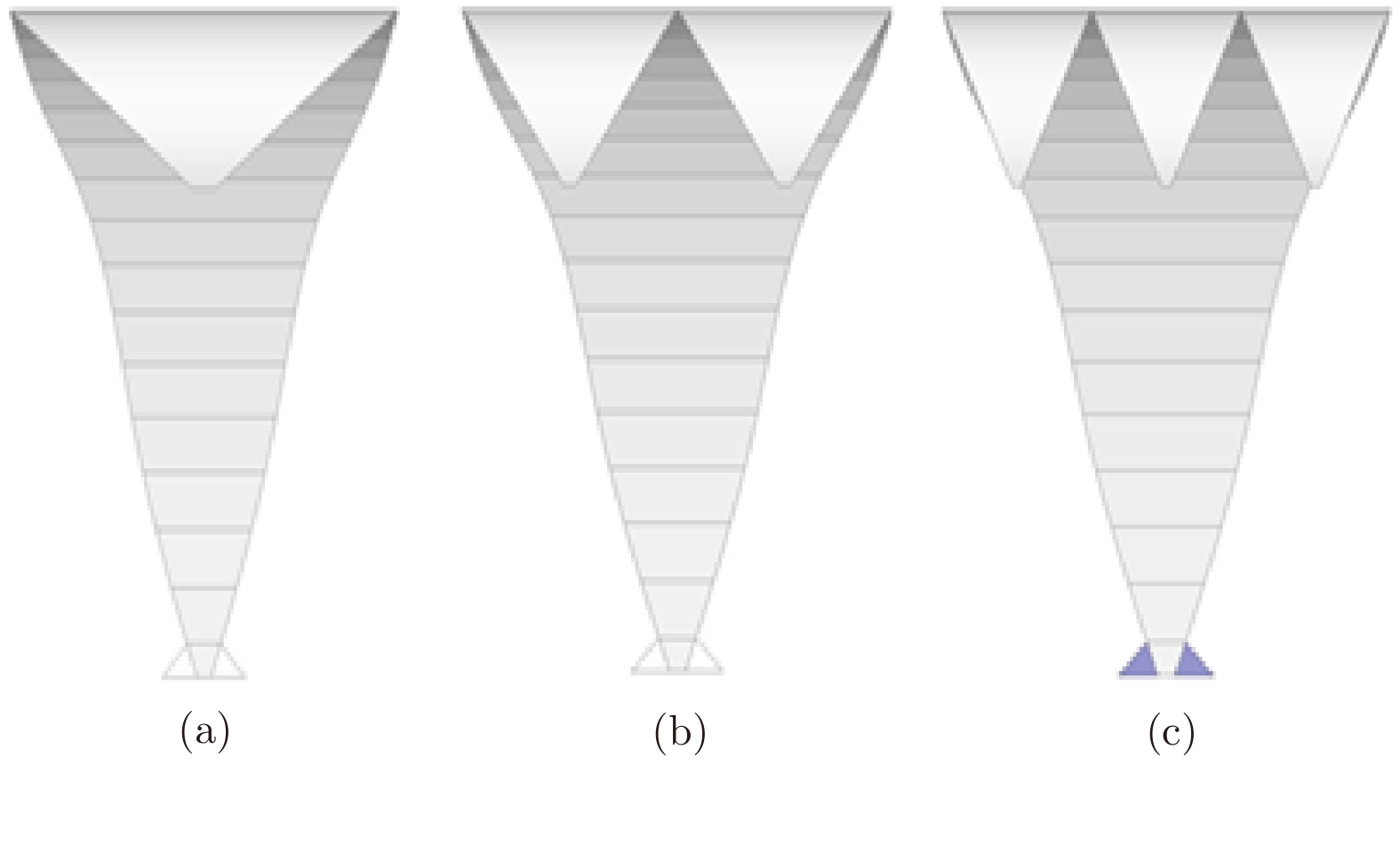
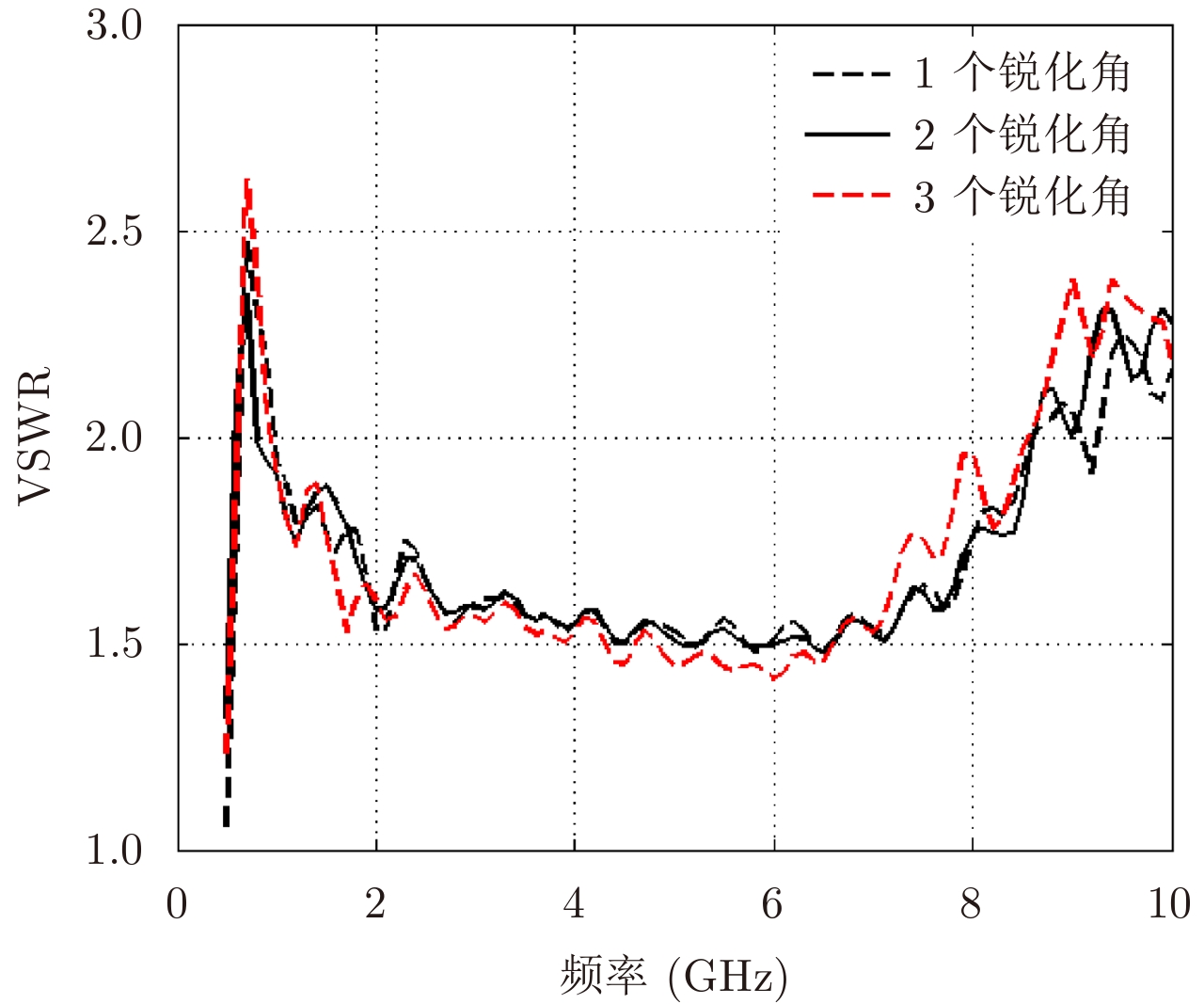
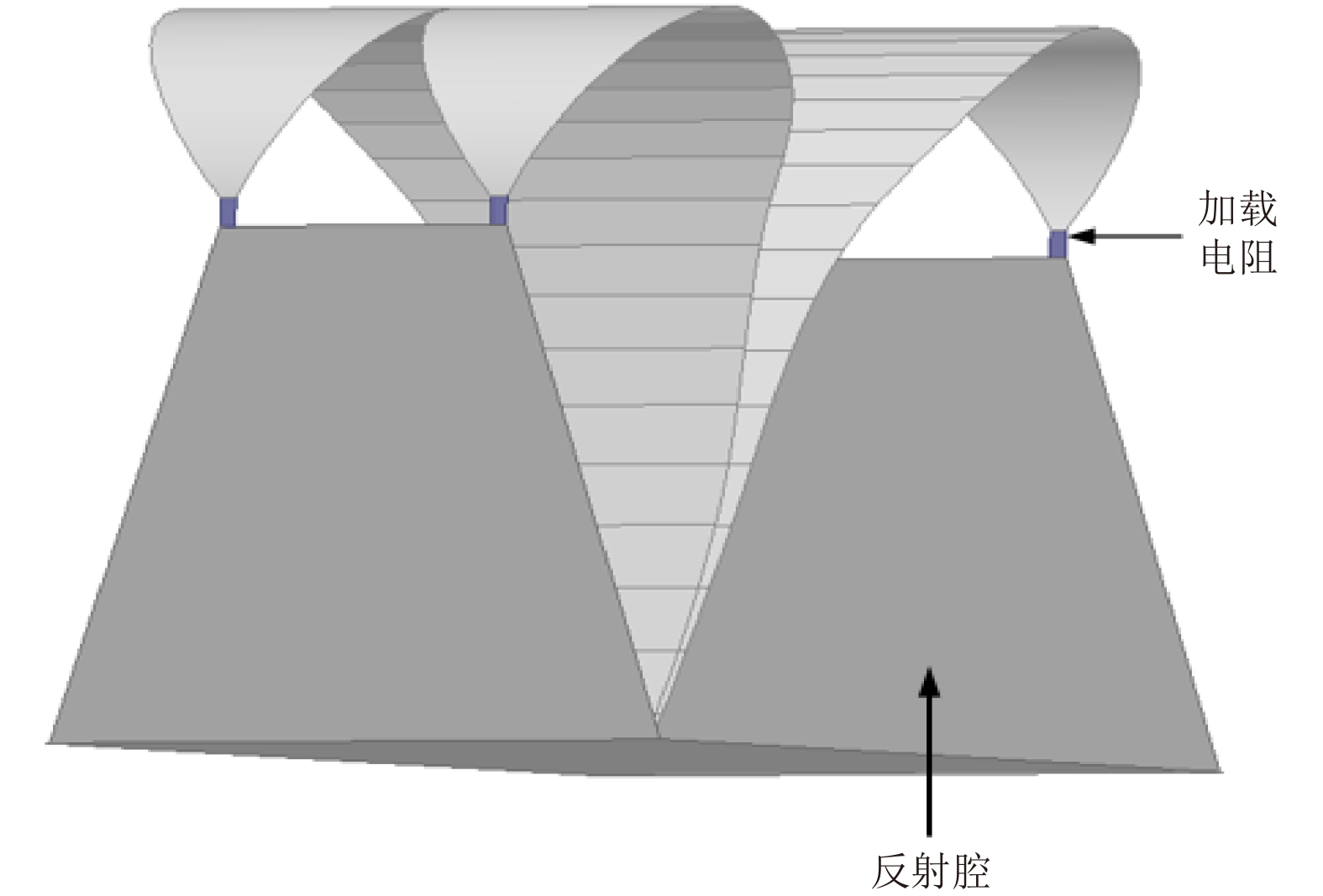
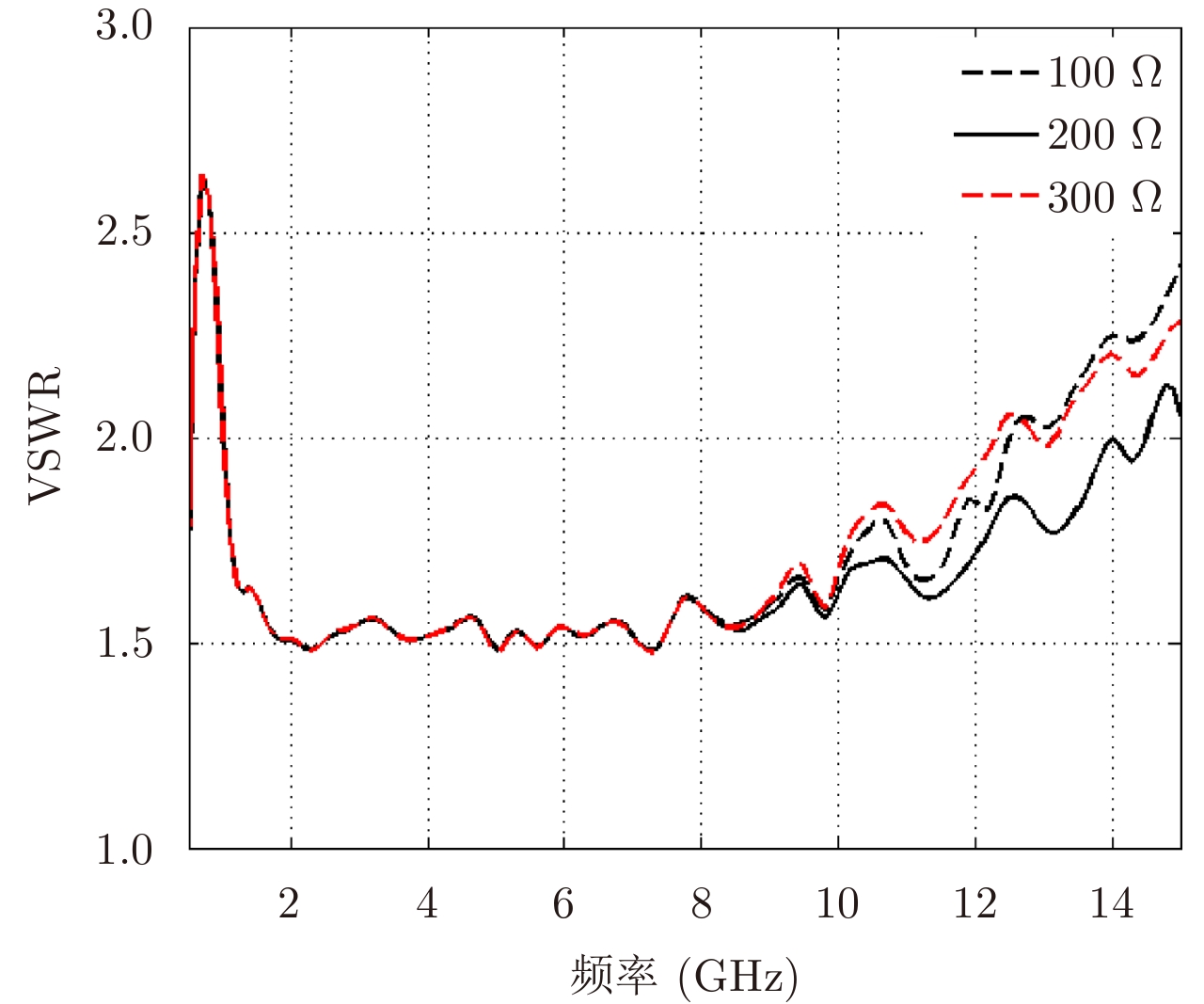
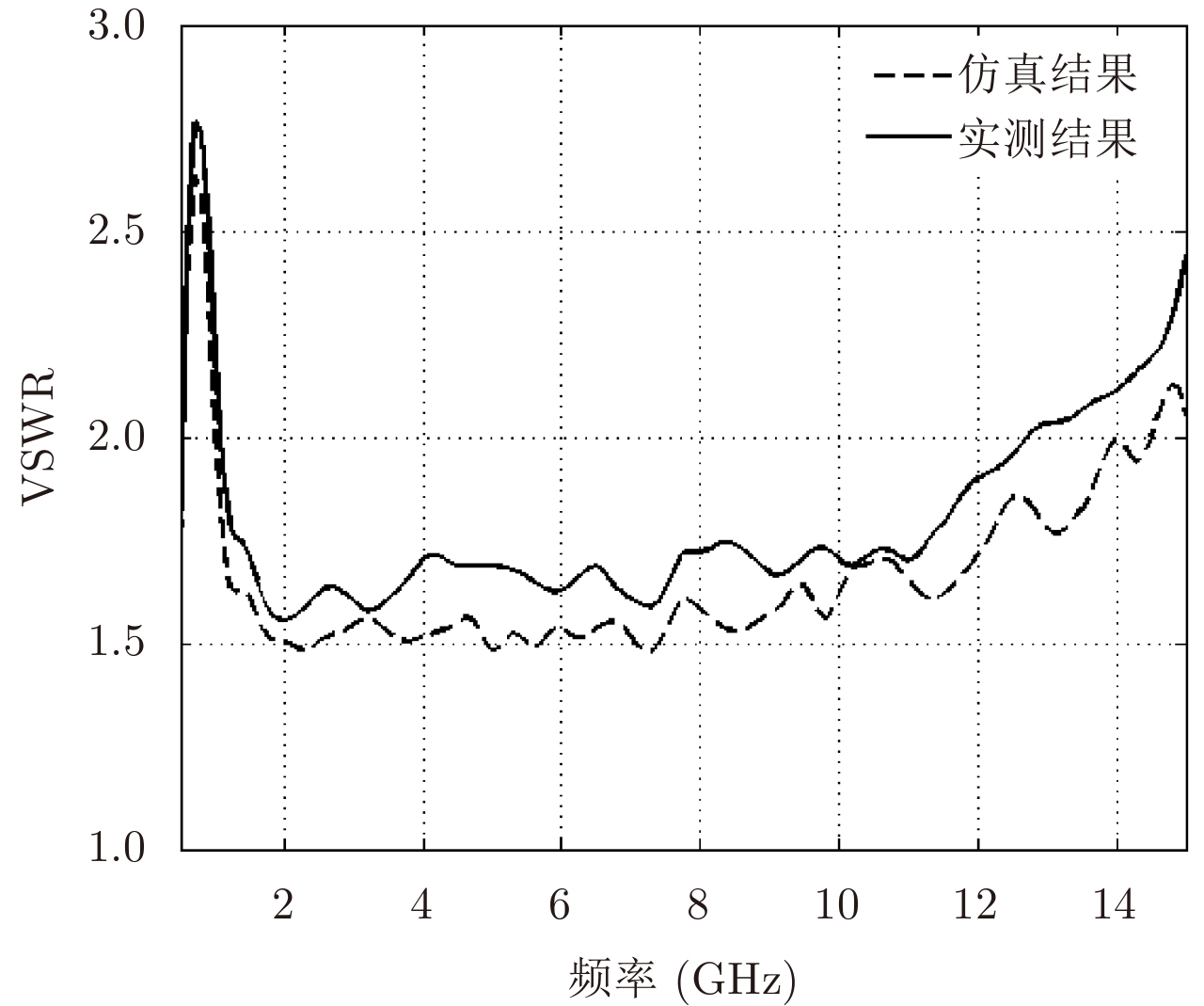
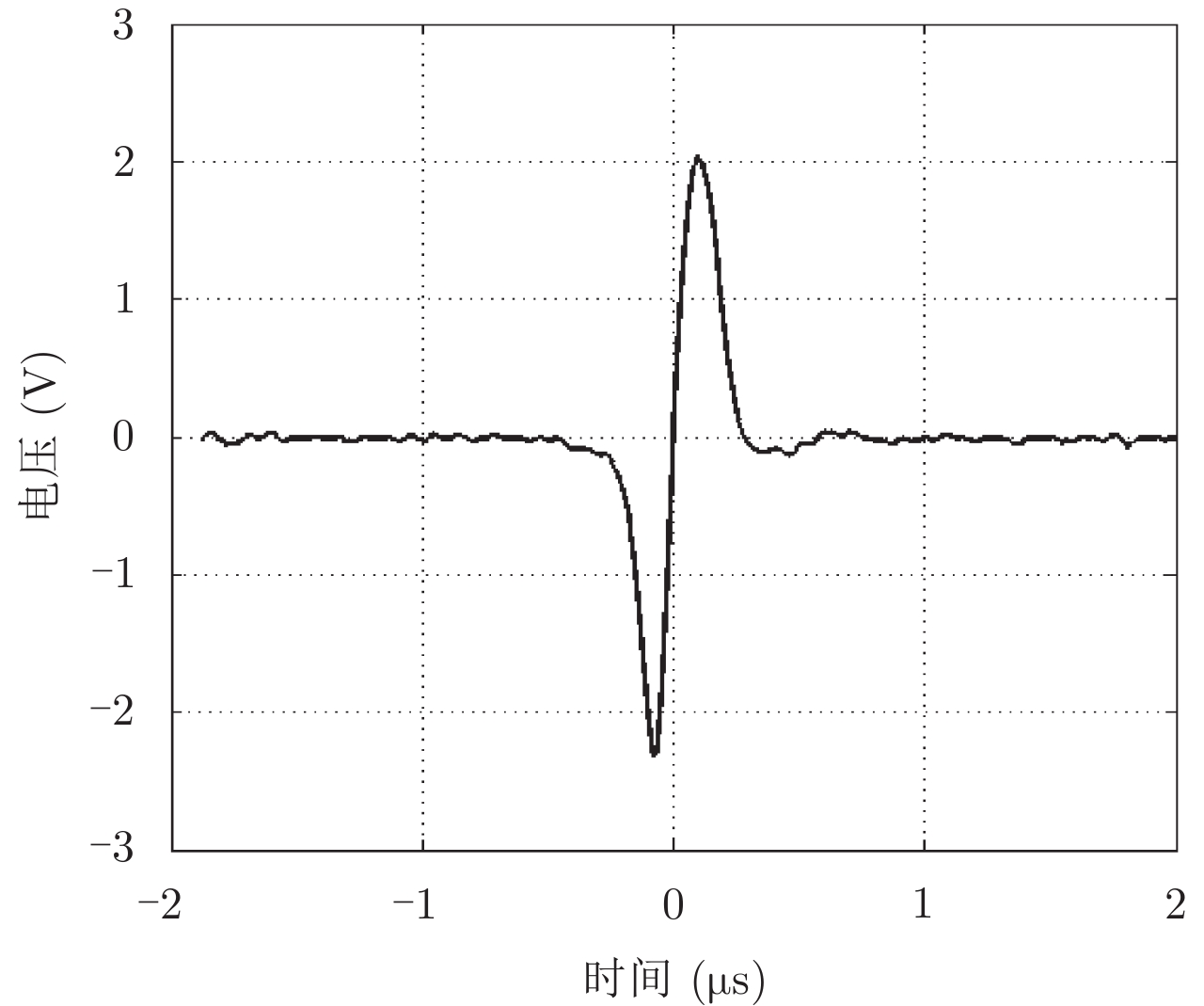
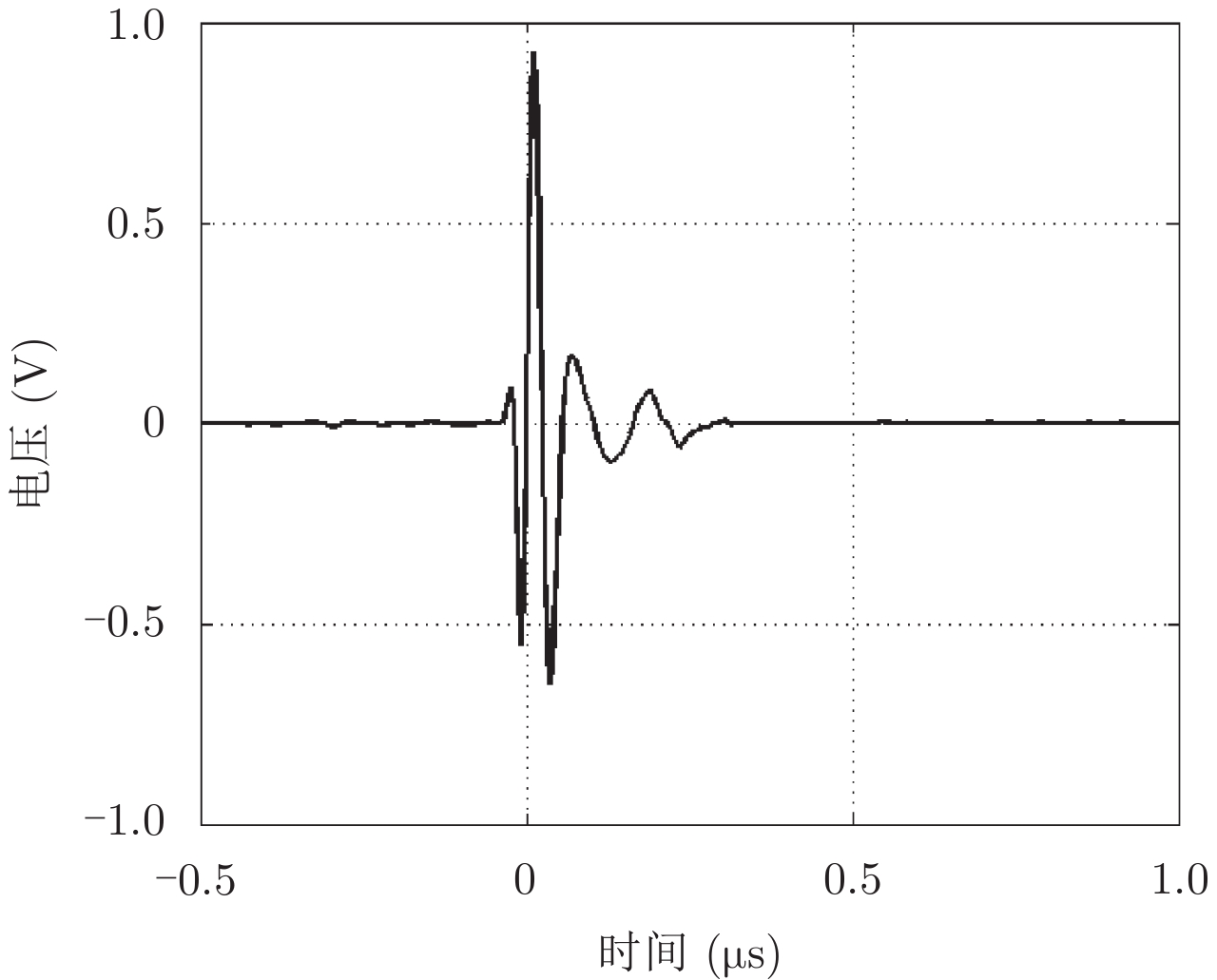
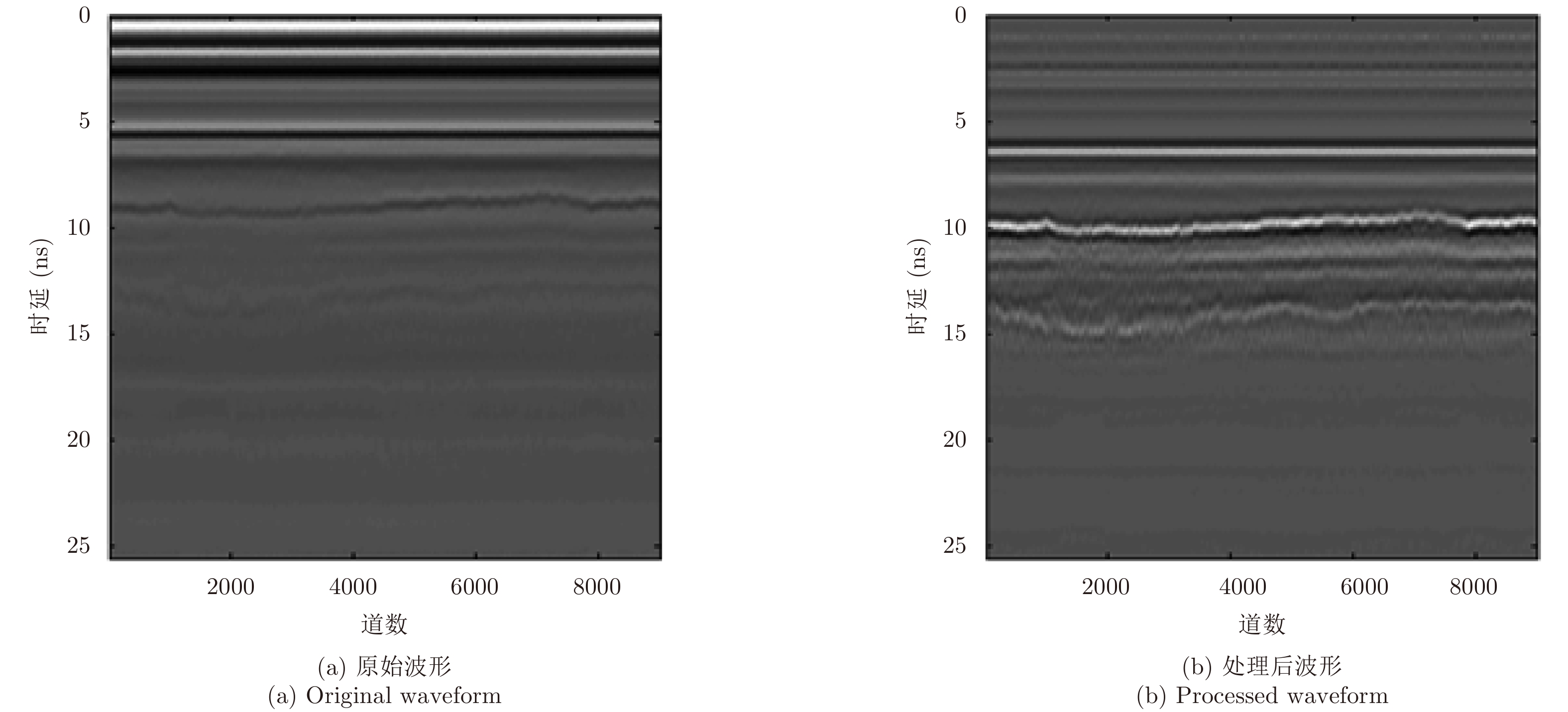
基于传输线理论和阻抗渐变思想,采用指数渐变结构及加载技术,对应用于高速公路探地雷达的超宽带TEM喇叭天线进行了设计和优化,分析了不同延展面条件下的驻波特性,应用金属反射腔和分布式电阻加载,进一步改善天线性能,并根据最佳仿真结果制作了一副天线。天线的测试结果表明:该TEM喇叭天线在0.9–12.6 GHz的带宽内电压驻波比小于2,波形保真性好。应用于高速公路探地雷达,取得了较好的效果。
基于传输线理论和阻抗渐变思想,采用指数渐变结构及加载技术,对应用于高速公路探地雷达的超宽带TEM喇叭天线进行了设计和优化,分析了不同延展面条件下的驻波特性,应用金属反射腔和分布式电阻加载,进一步改善天线性能,并根据最佳仿真结果制作了一副天线。天线的测试结果表明:该TEM喇叭天线在0.9–12.6 GHz的带宽内电压驻波比小于2,波形保真性好。应用于高速公路探地雷达,取得了较好的效果。




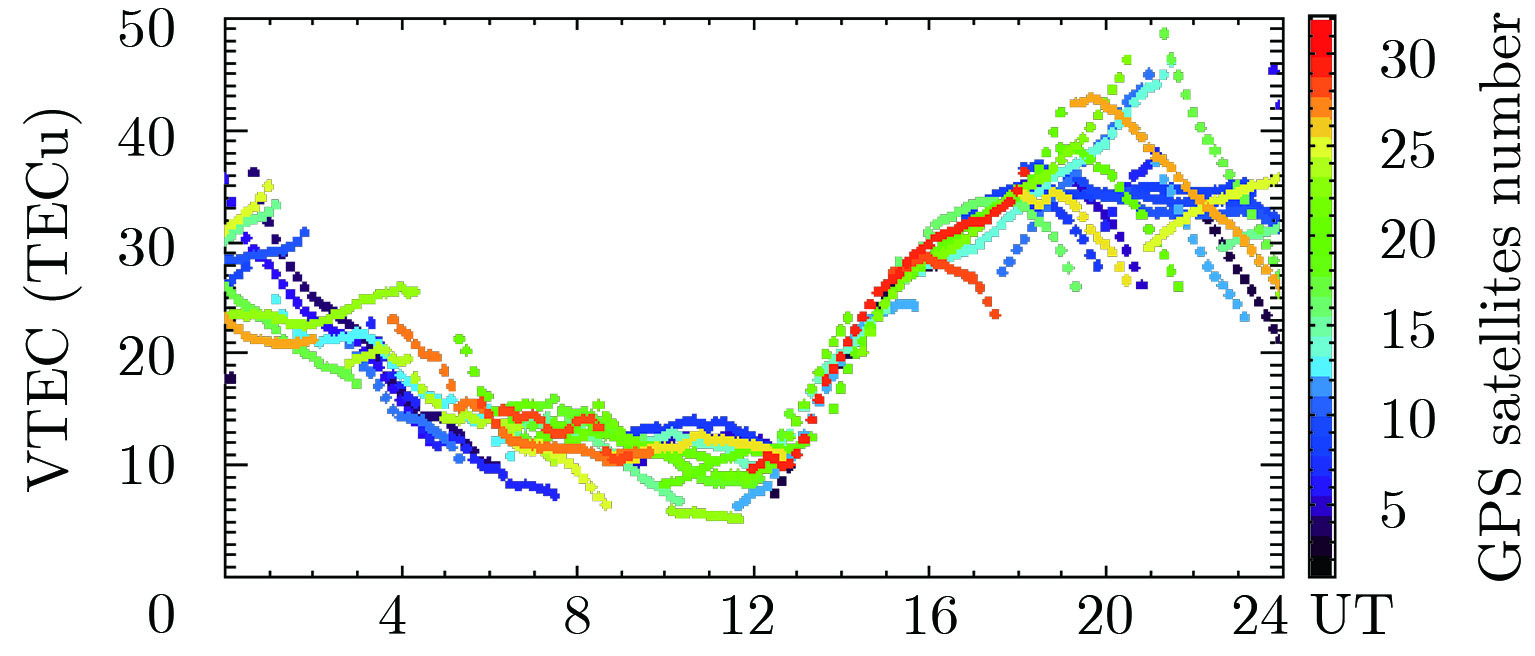
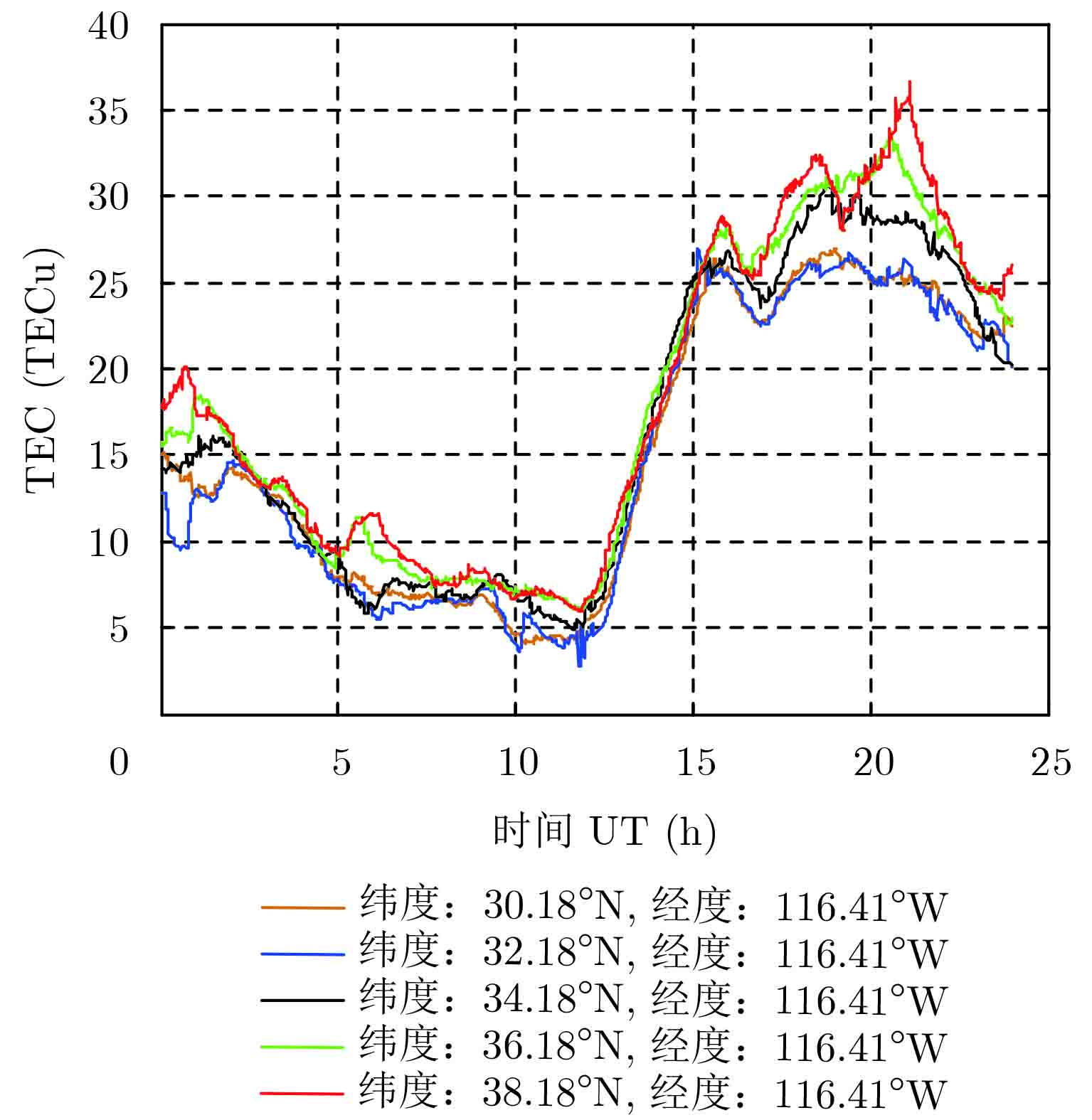
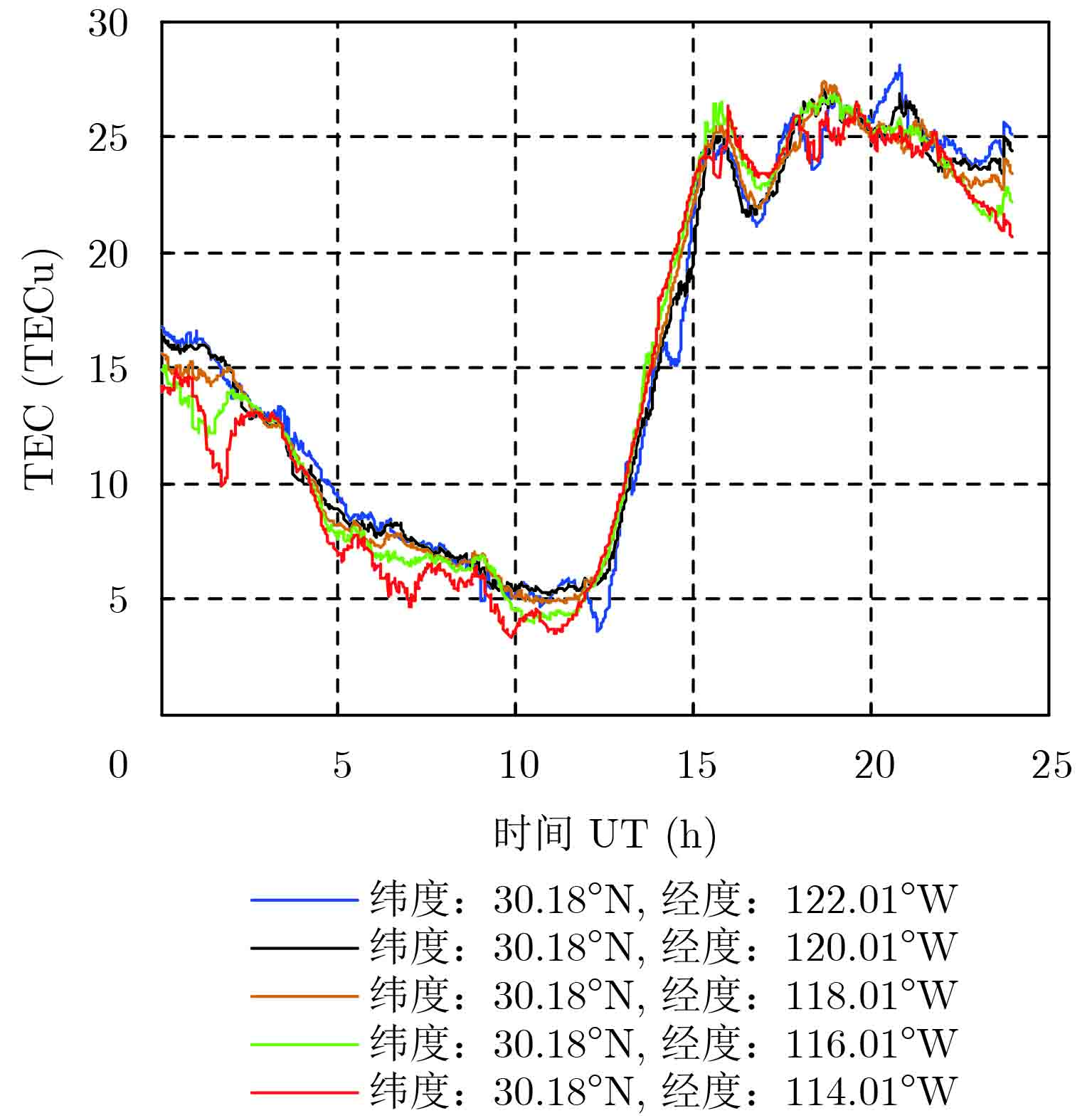
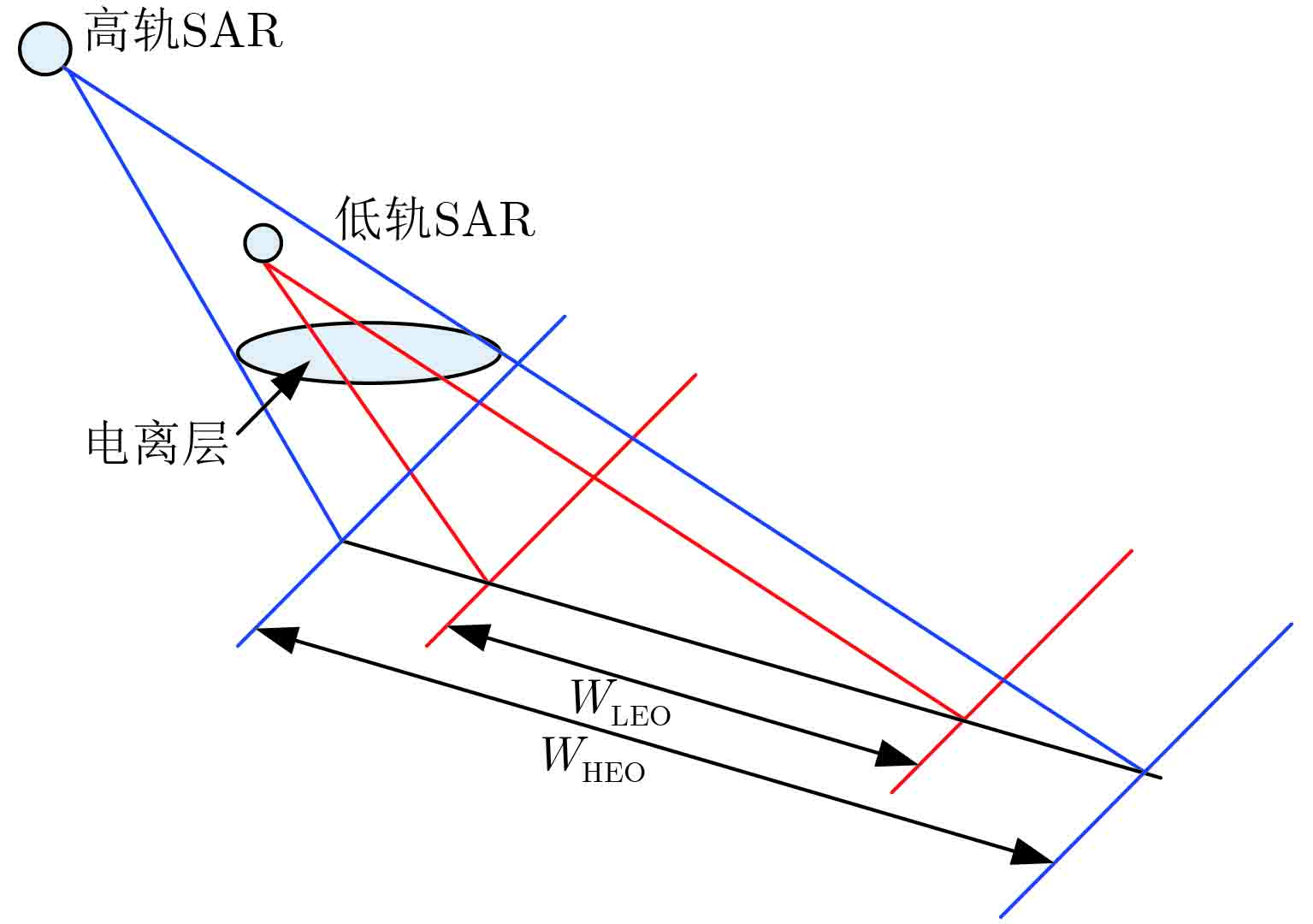
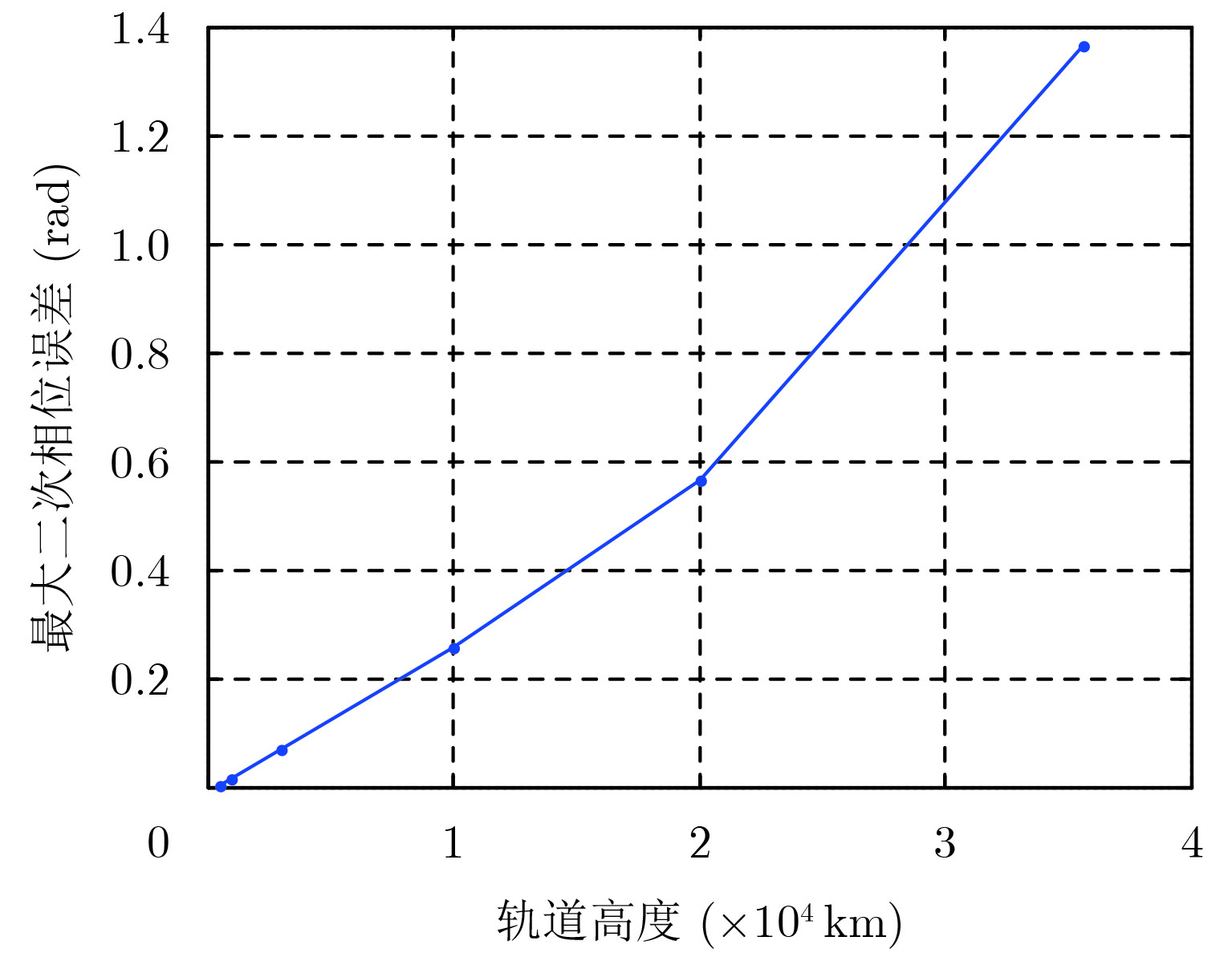
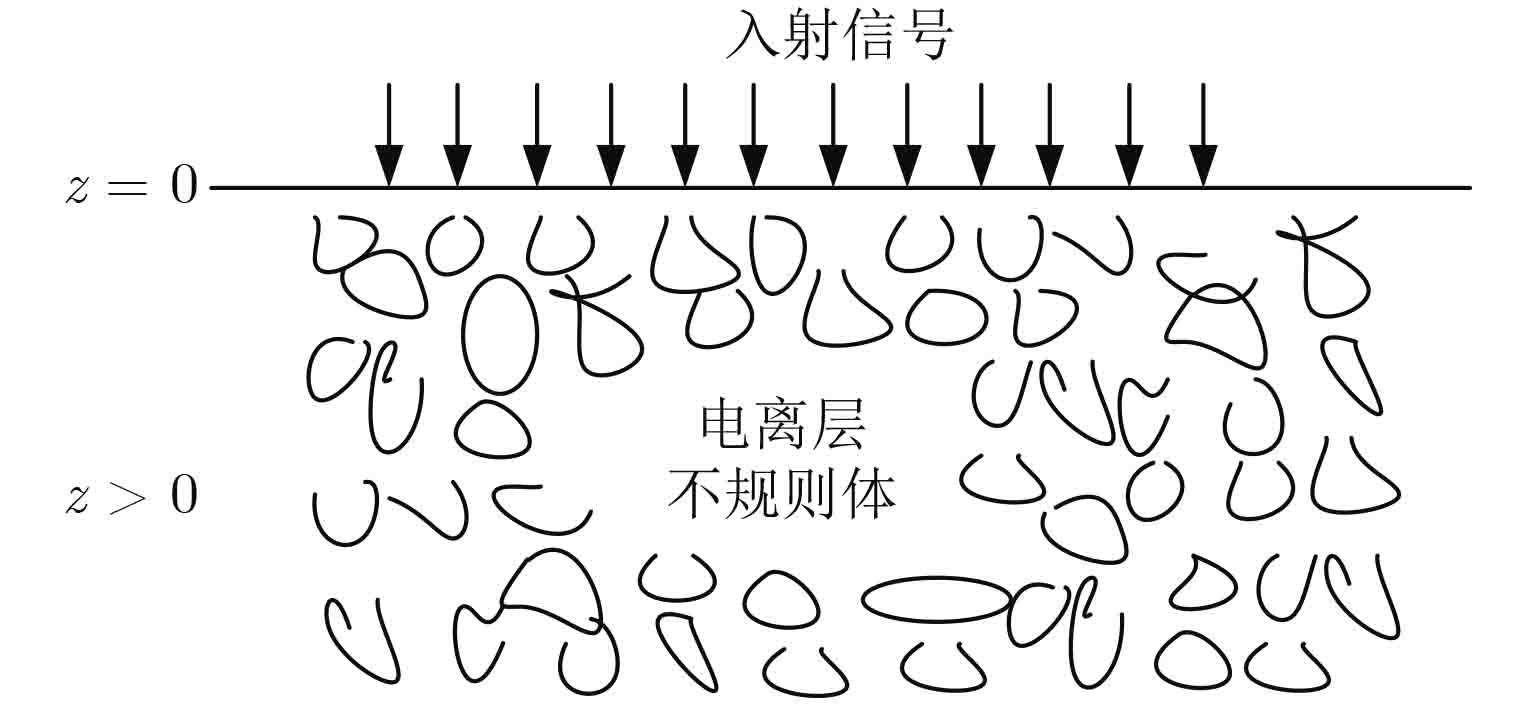
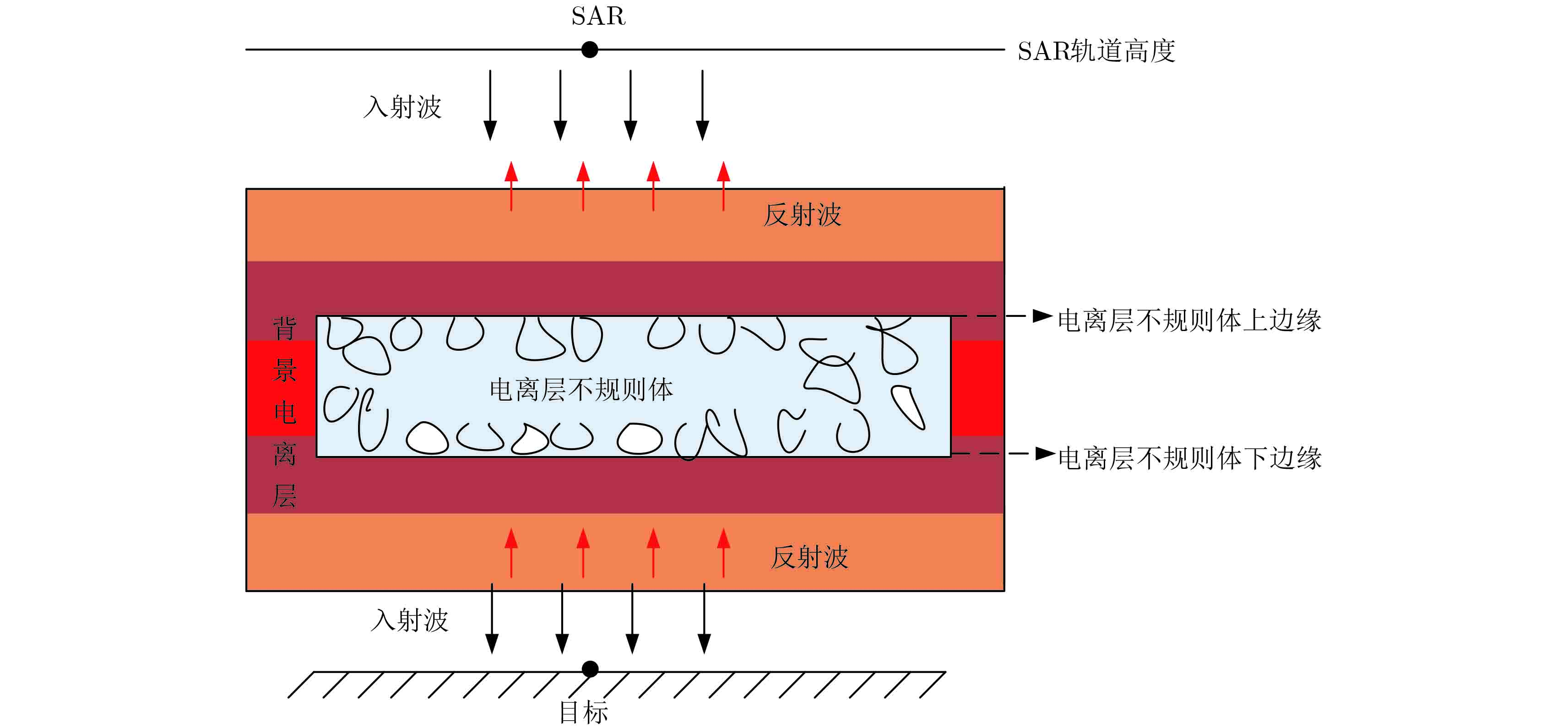
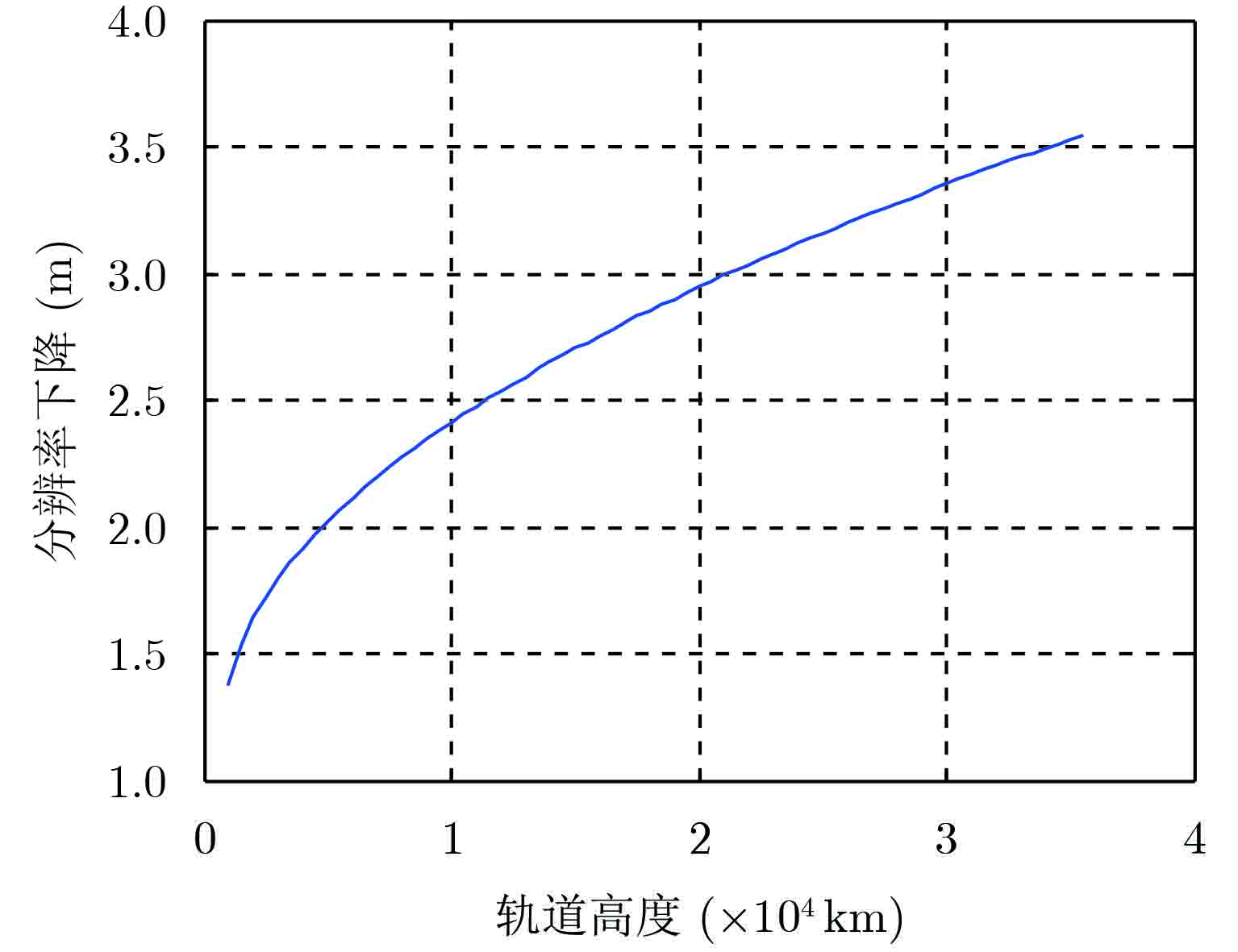
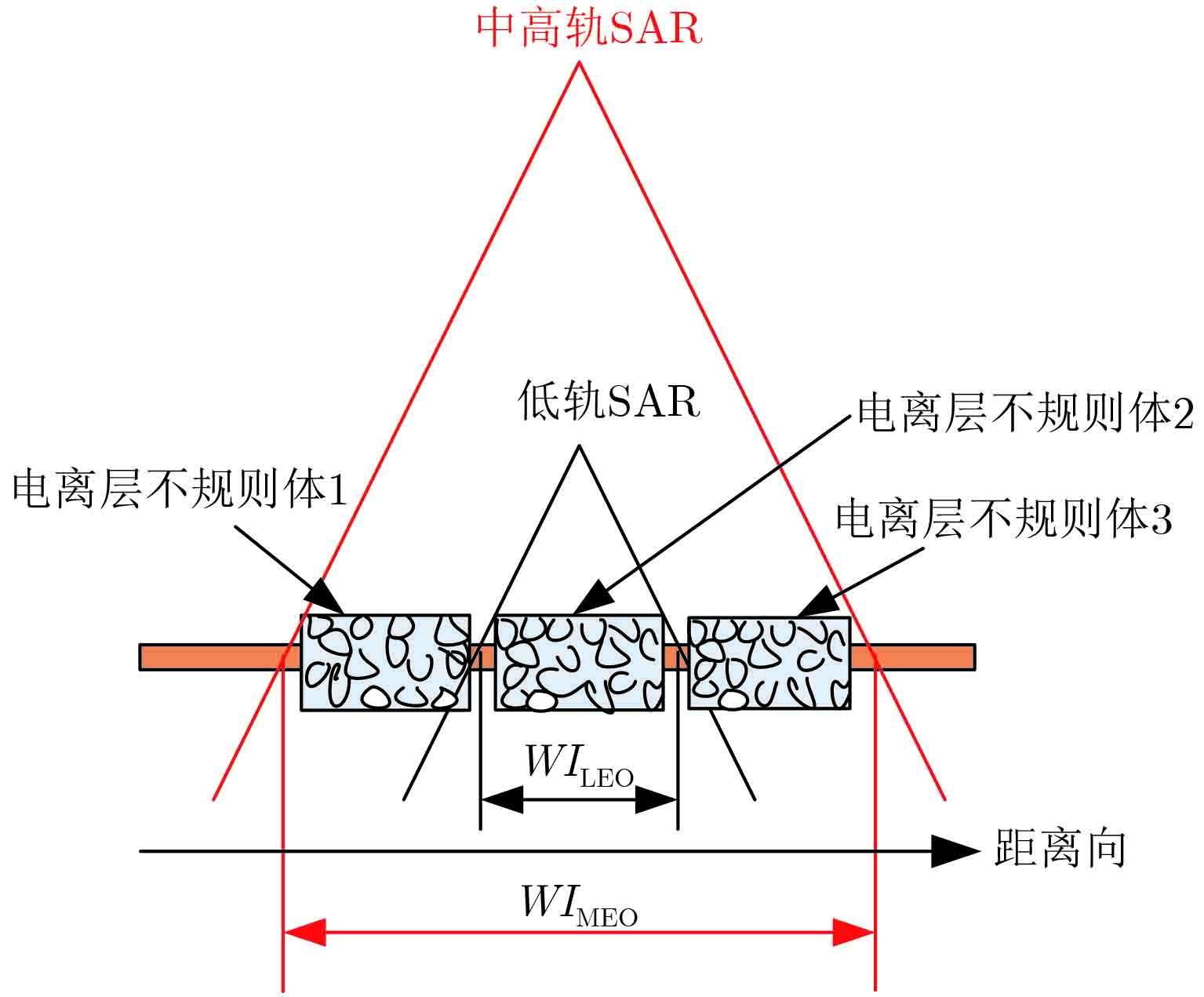
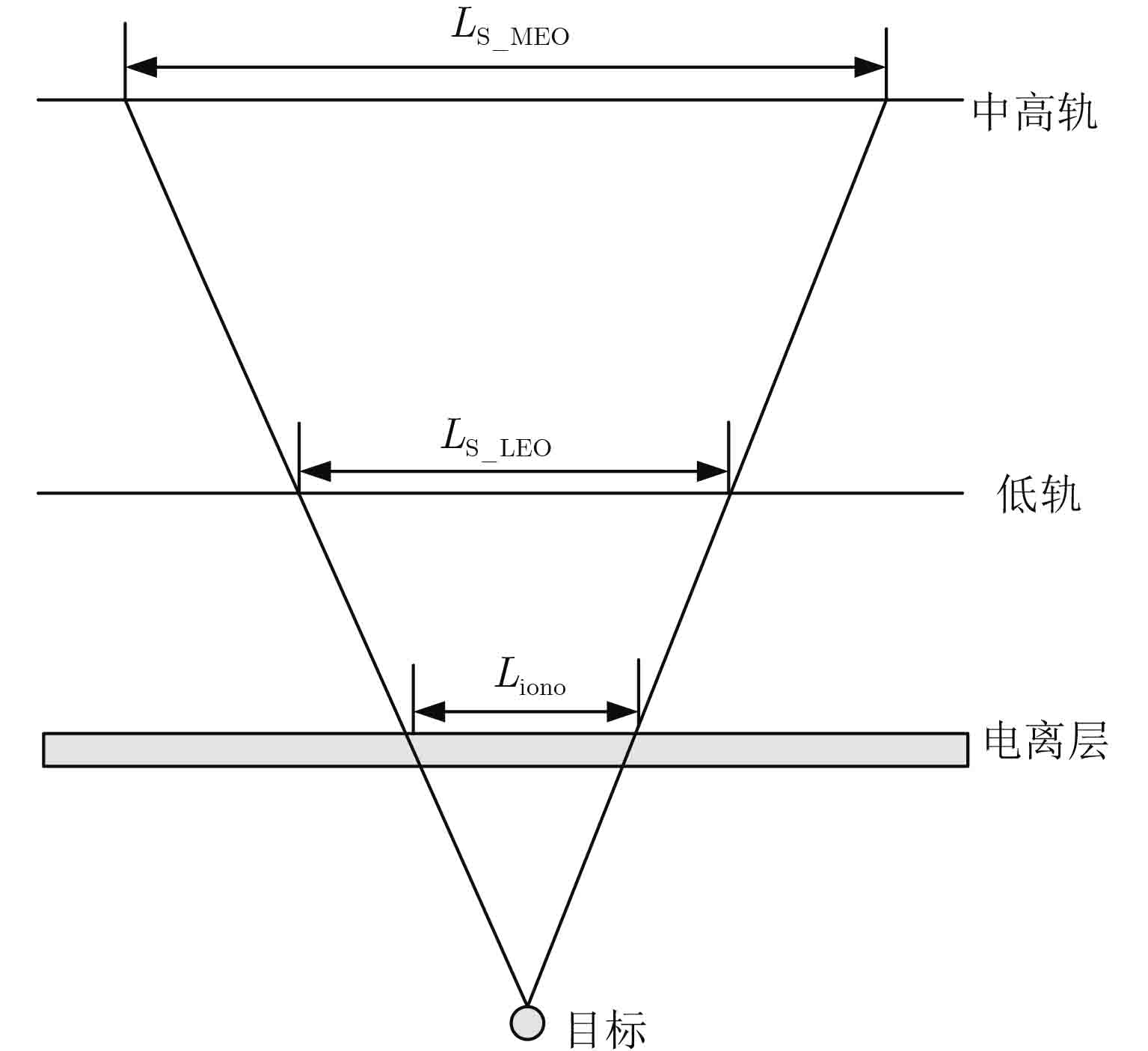
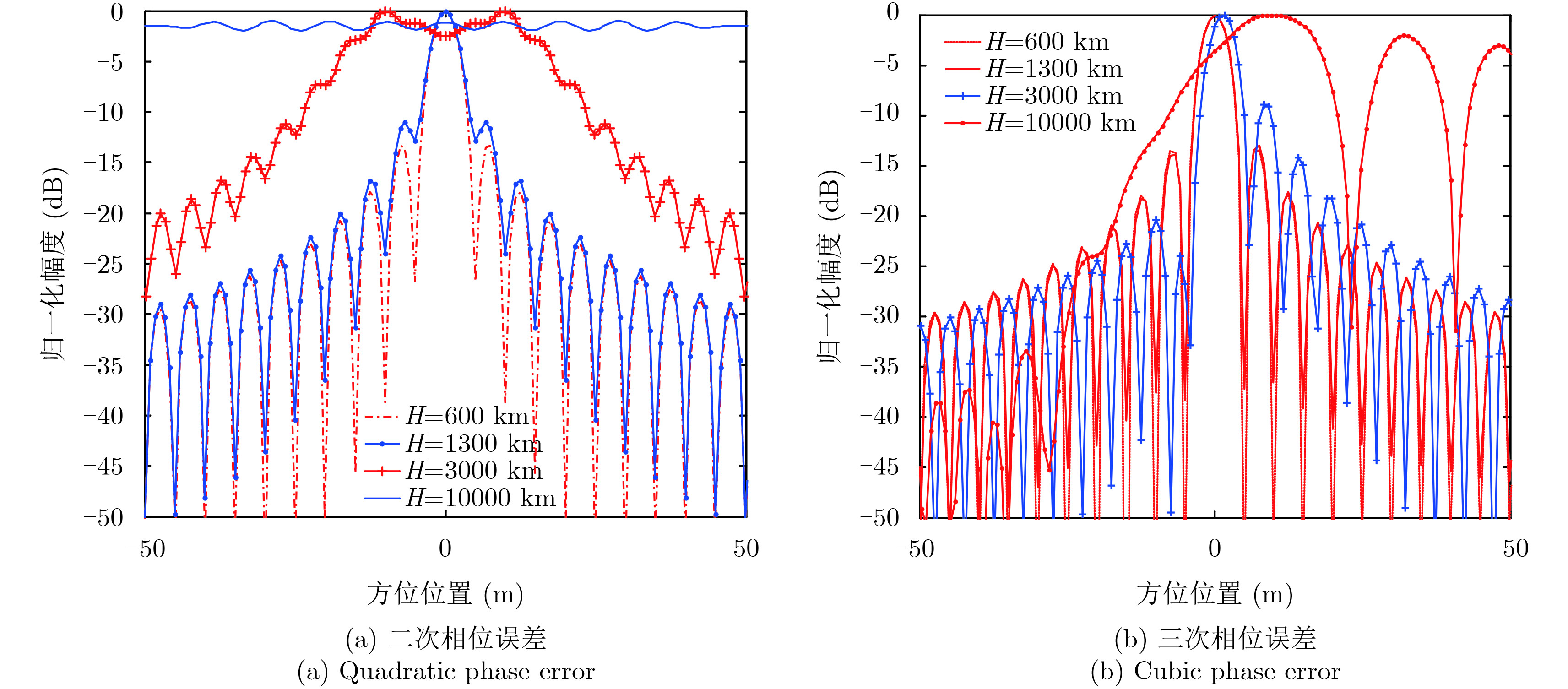
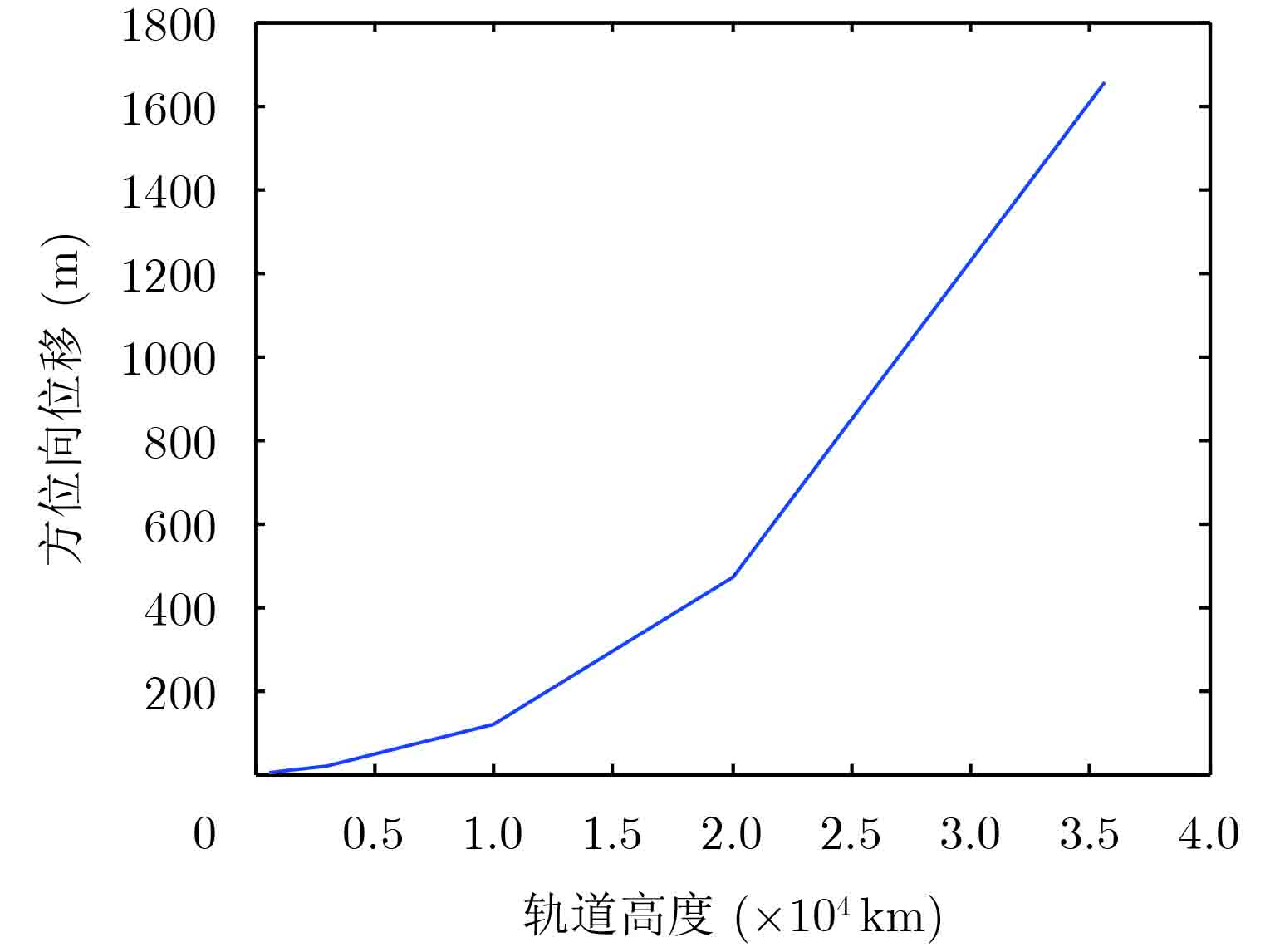
中高轨道合成孔径雷达(Synthetic Aperture Radar, SAR)是下一代星载SAR重要发展方向之一,电离层影响分析是推动中高轨道SAR系统发展的关键技术之一。该文利用电离层实测数据分析了电离层时空变化特征,根据电离层时空变化特性,结合中高轨道SAR合成孔径时间长、测绘带宽、轨道高等特点,从SAR成像理论角度出发,分别从距离向和方位向阐述了电离层对中高轨SAR成像质量的影响因素和影响机理,通过分析揭示了中高轨SAR电离层影响与低轨SAR的不同之处。
中高轨道合成孔径雷达(Synthetic Aperture Radar, SAR)是下一代星载SAR重要发展方向之一,电离层影响分析是推动中高轨道SAR系统发展的关键技术之一。该文利用电离层实测数据分析了电离层时空变化特征,根据电离层时空变化特性,结合中高轨道SAR合成孔径时间长、测绘带宽、轨道高等特点,从SAR成像理论角度出发,分别从距离向和方位向阐述了电离层对中高轨SAR成像质量的影响因素和影响机理,通过分析揭示了中高轨SAR电离层影响与低轨SAR的不同之处。





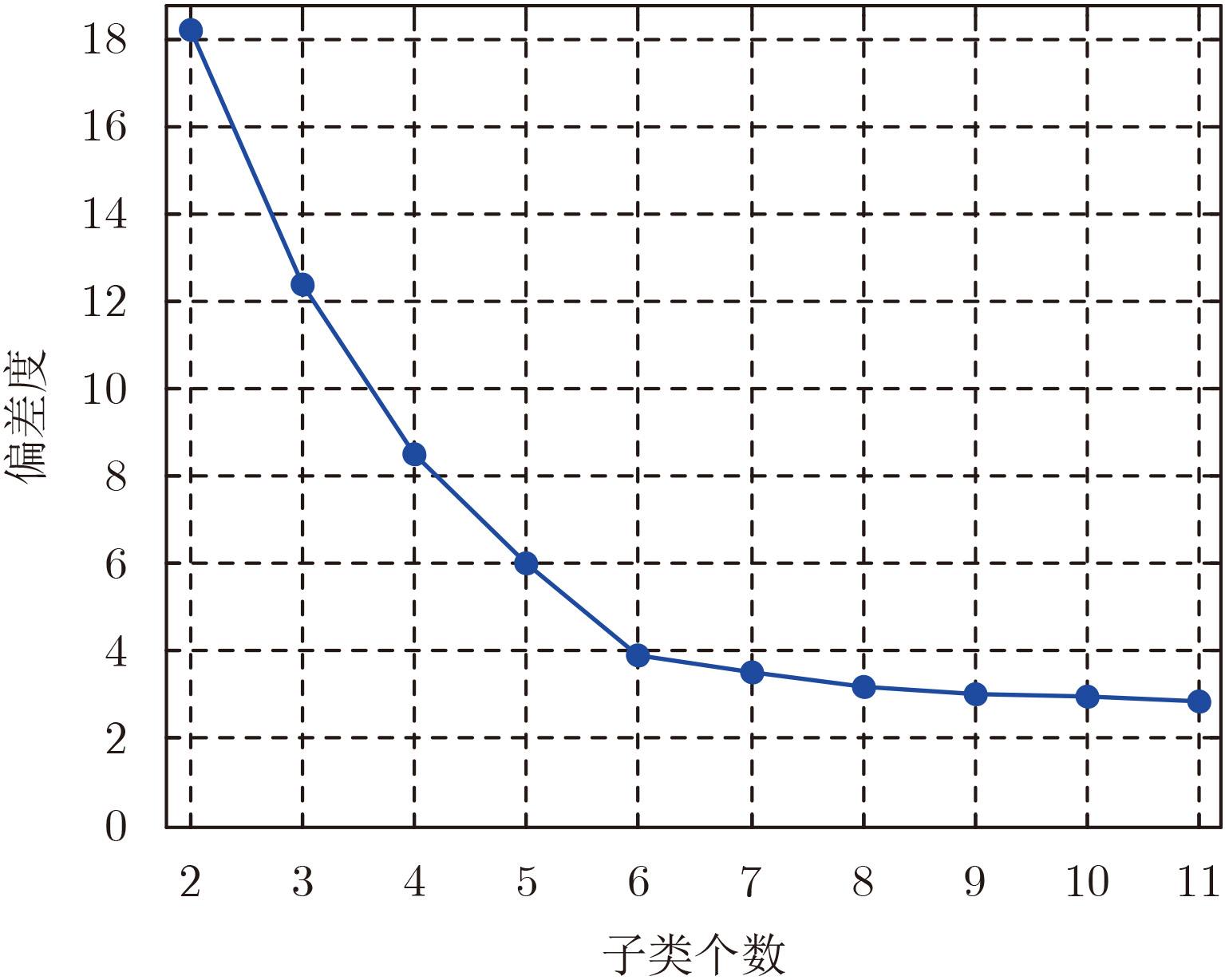
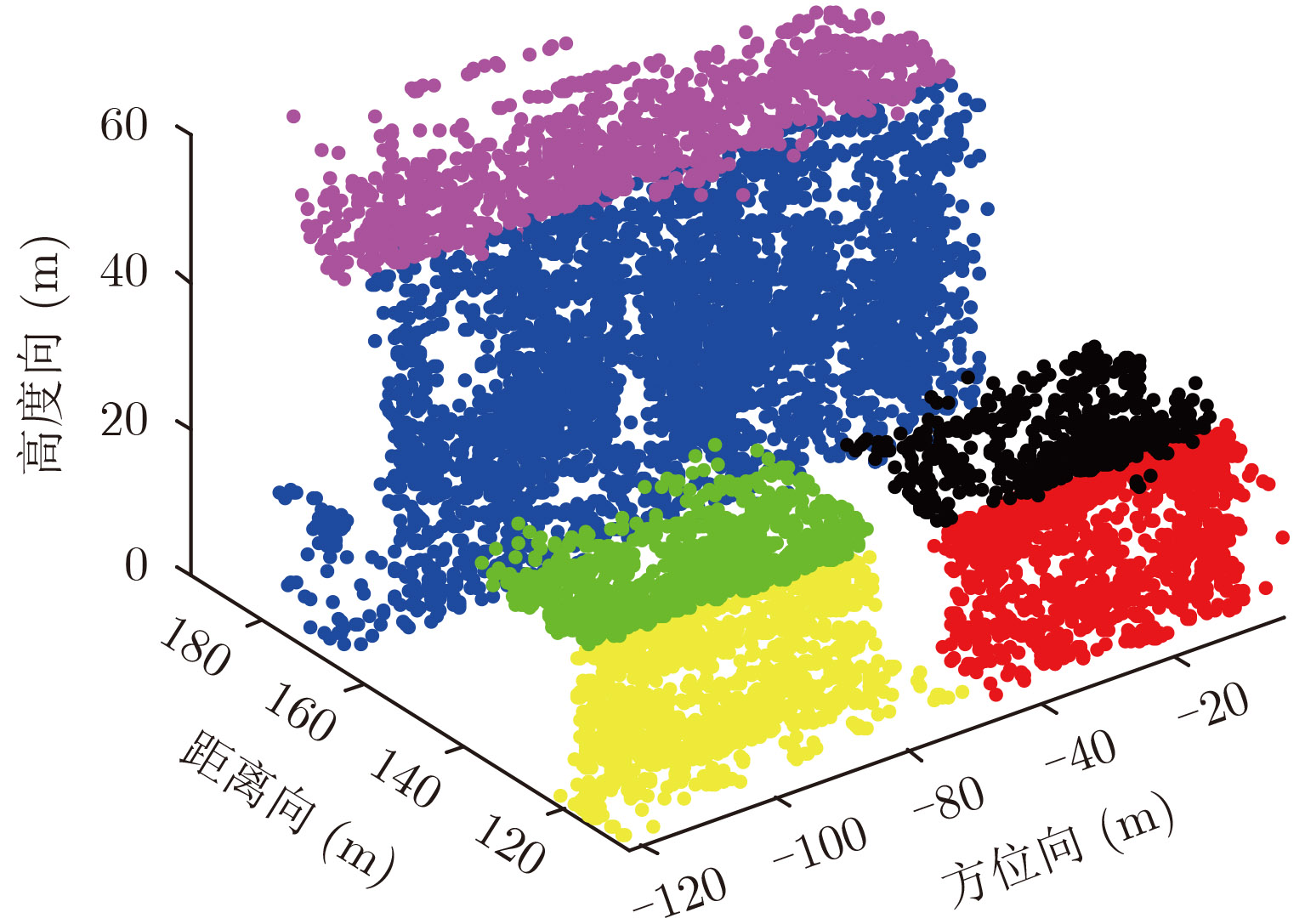
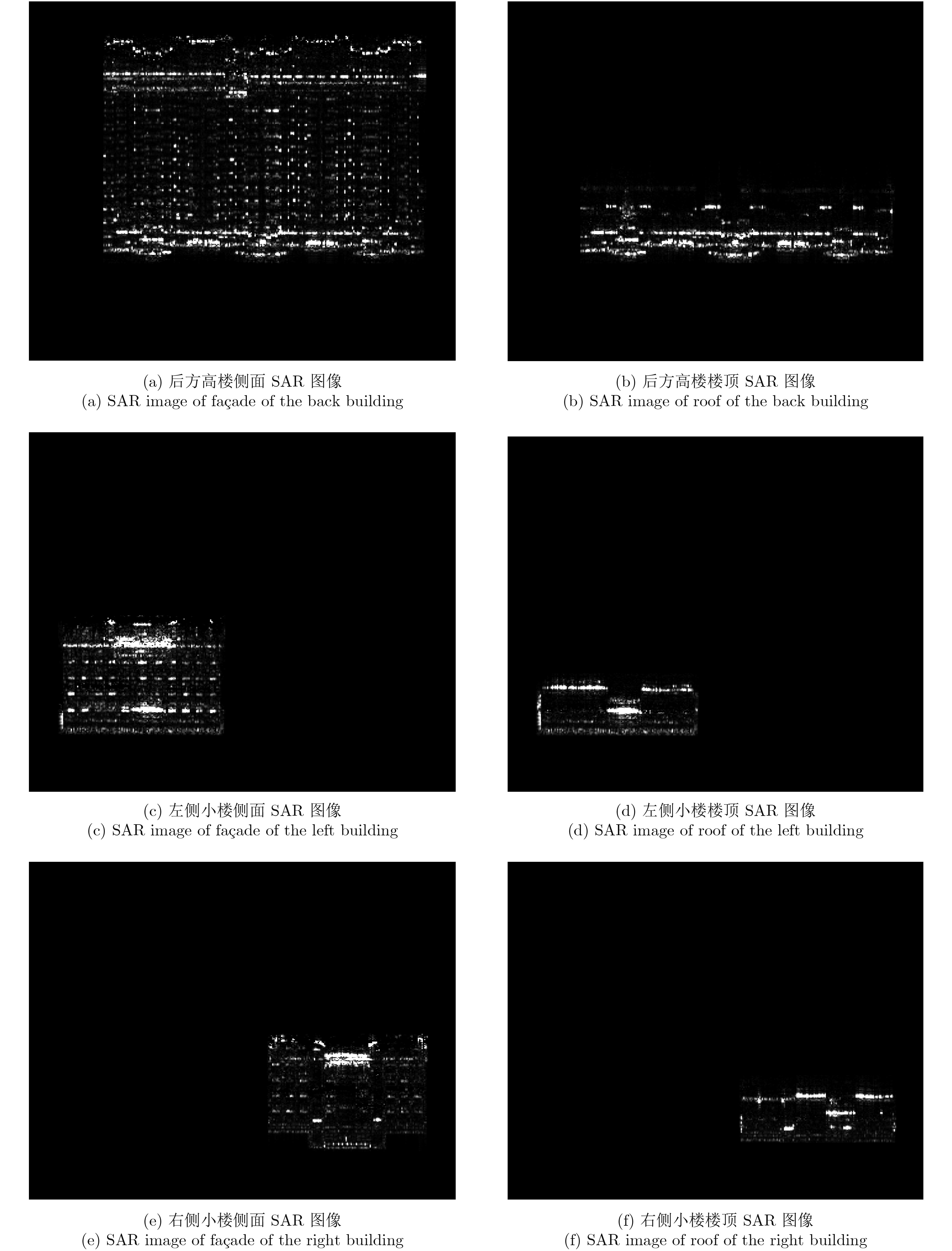
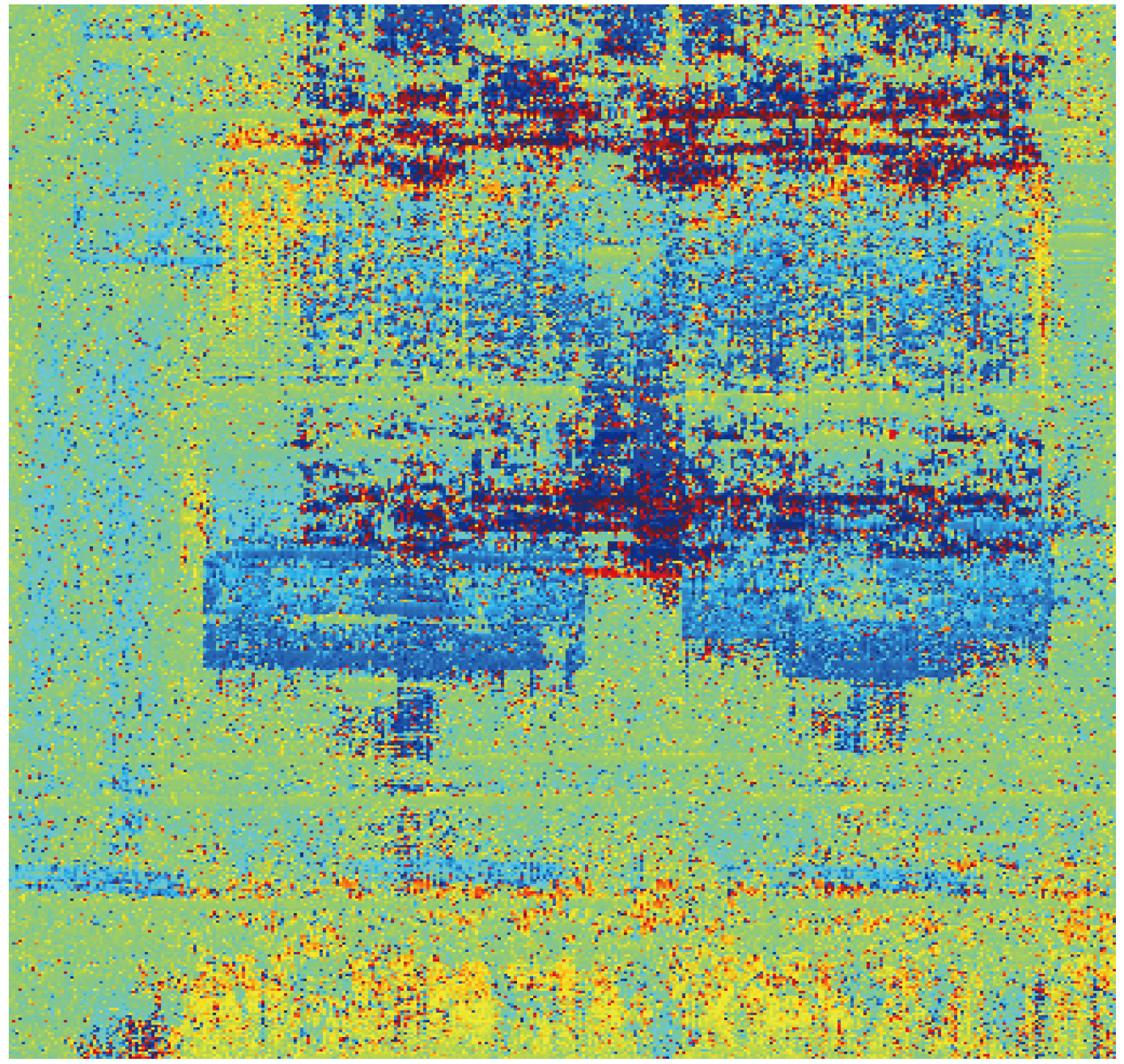
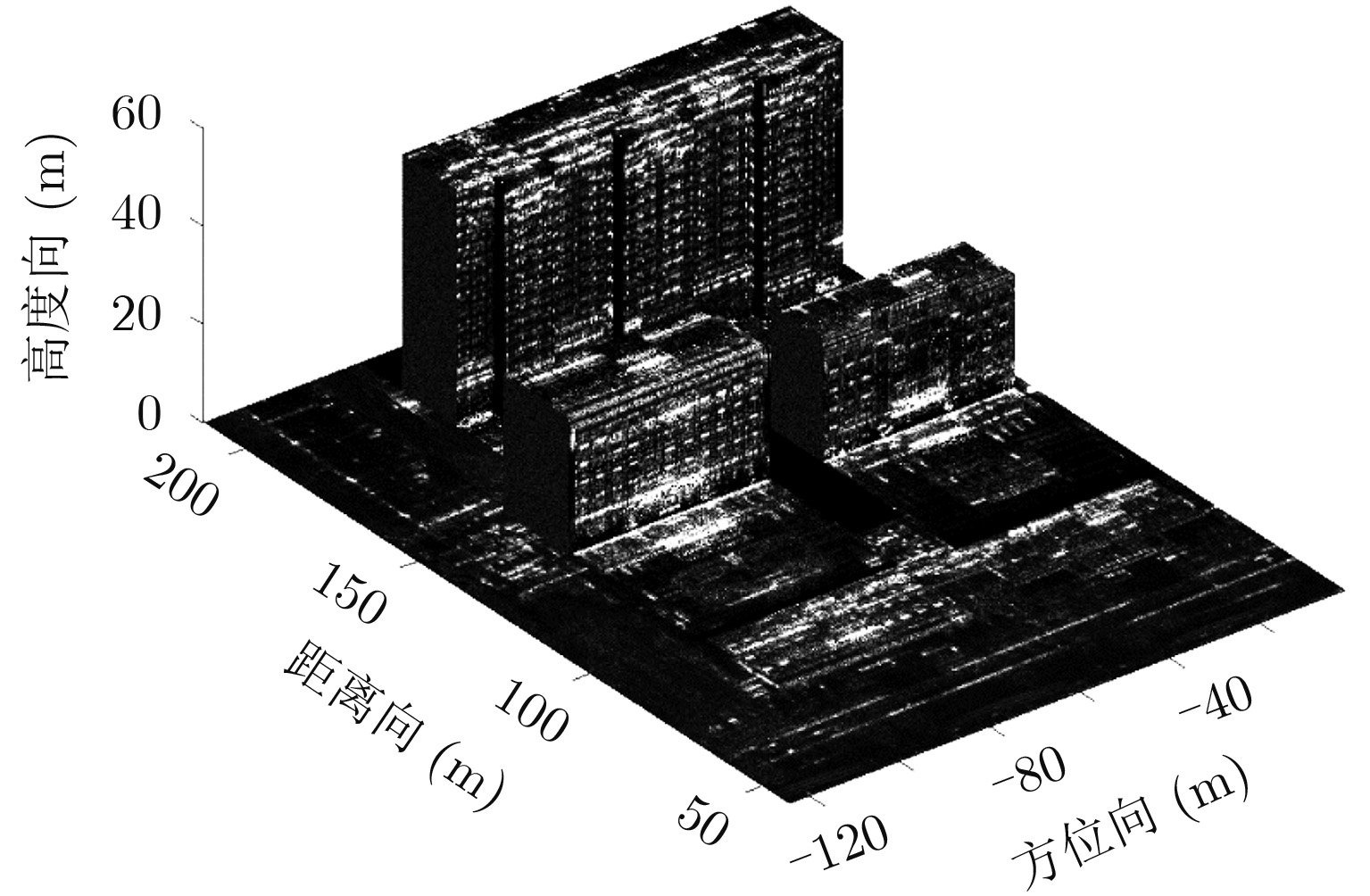
阵列干涉SAR具备高程分辨能力,单次航过即可生成观测场景的3维点云分布,解决叠掩问题。但是,由于阵列干涉SAR阵元数目有限、基线长度较短,高程向分辨率受到限制,加之城区建筑物的叠掩现象,常规方法重建结果定位精度较差,难以提取建筑物有效特征。针对这个问题,该文提出了一种基于高斯混合聚类的阵列干涉SAR 3维成像方法,首先通过基于压缩感知(Compressive Sensing, CS)的超分辨算法获得场景区域的3维点云分布,然后利用密度估计方法提取出建筑物的散射点,之后使用高斯混合模型(Gaussian Mixture Model, GMM)对建筑物3维点云进行聚类,最后利用系统参数完成各个区域的SAR图像反演,实现建筑物的3维成像。通过国内首次机载阵列干涉SAR实验的实际数据,验证了该文算法的有效性,并获得了真实的建筑物3维成像结果。
阵列干涉SAR具备高程分辨能力,单次航过即可生成观测场景的3维点云分布,解决叠掩问题。但是,由于阵列干涉SAR阵元数目有限、基线长度较短,高程向分辨率受到限制,加之城区建筑物的叠掩现象,常规方法重建结果定位精度较差,难以提取建筑物有效特征。针对这个问题,该文提出了一种基于高斯混合聚类的阵列干涉SAR 3维成像方法,首先通过基于压缩感知(Compressive Sensing, CS)的超分辨算法获得场景区域的3维点云分布,然后利用密度估计方法提取出建筑物的散射点,之后使用高斯混合模型(Gaussian Mixture Model, GMM)对建筑物3维点云进行聚类,最后利用系统参数完成各个区域的SAR图像反演,实现建筑物的3维成像。通过国内首次机载阵列干涉SAR实验的实际数据,验证了该文算法的有效性,并获得了真实的建筑物3维成像结果。







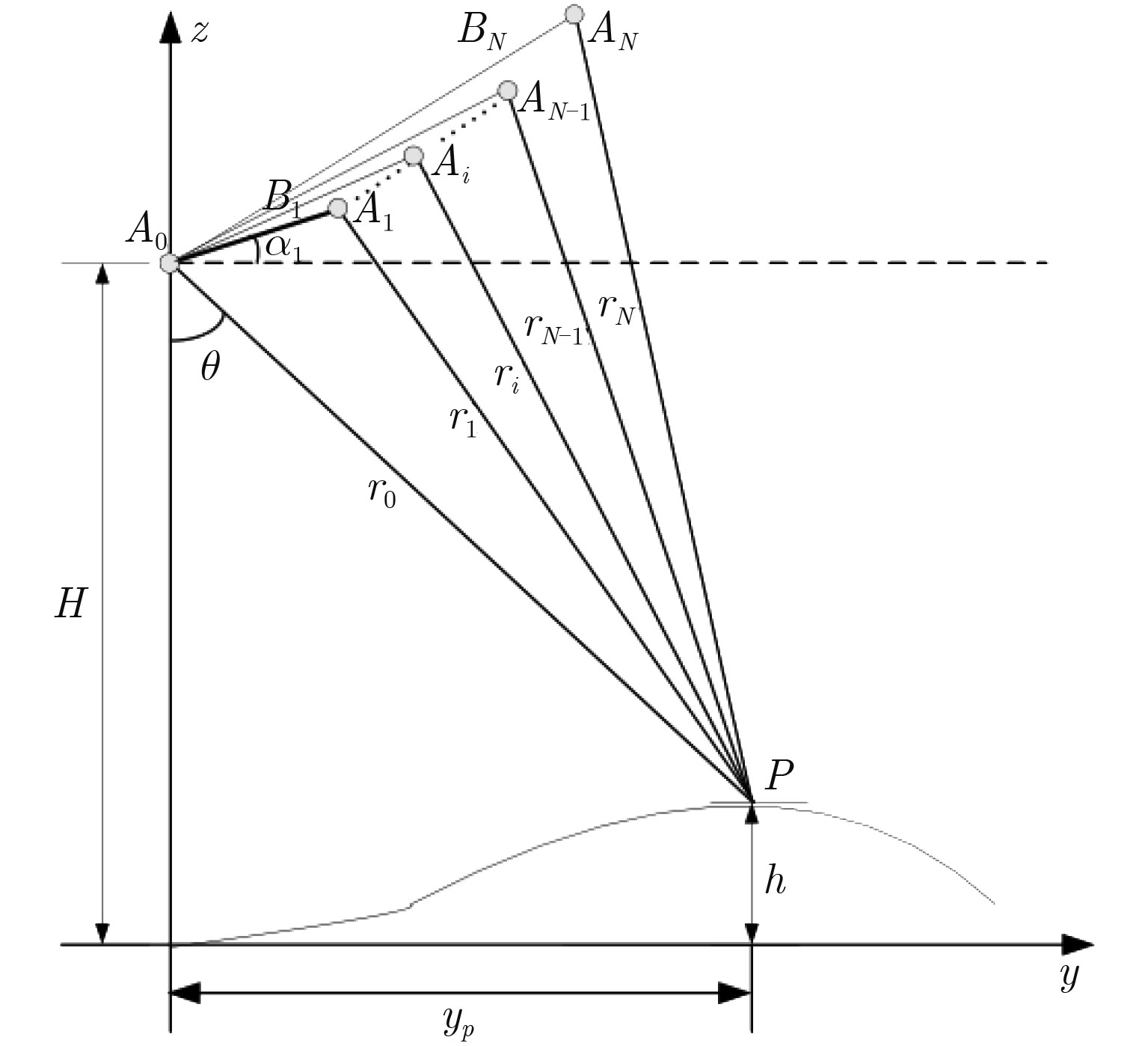
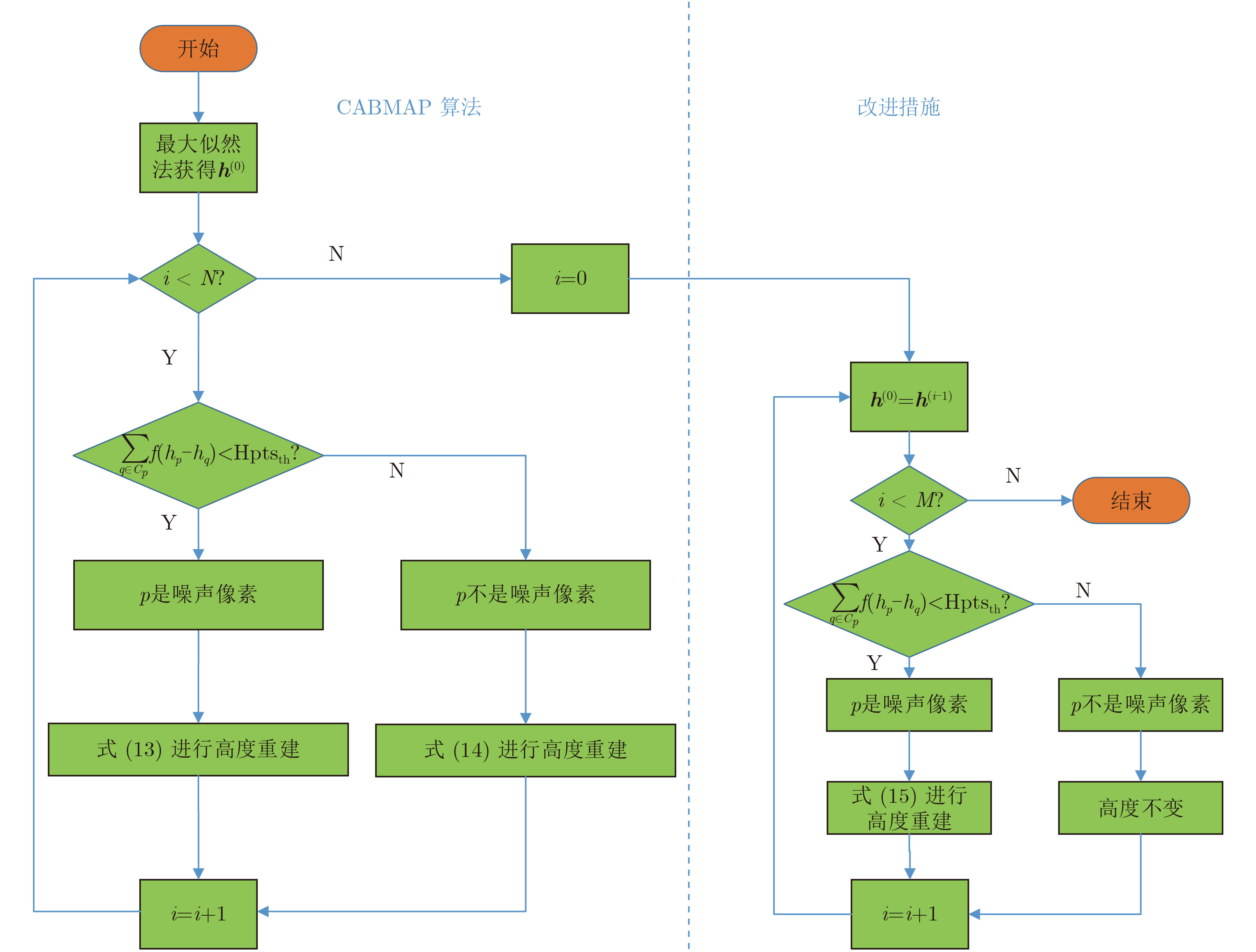
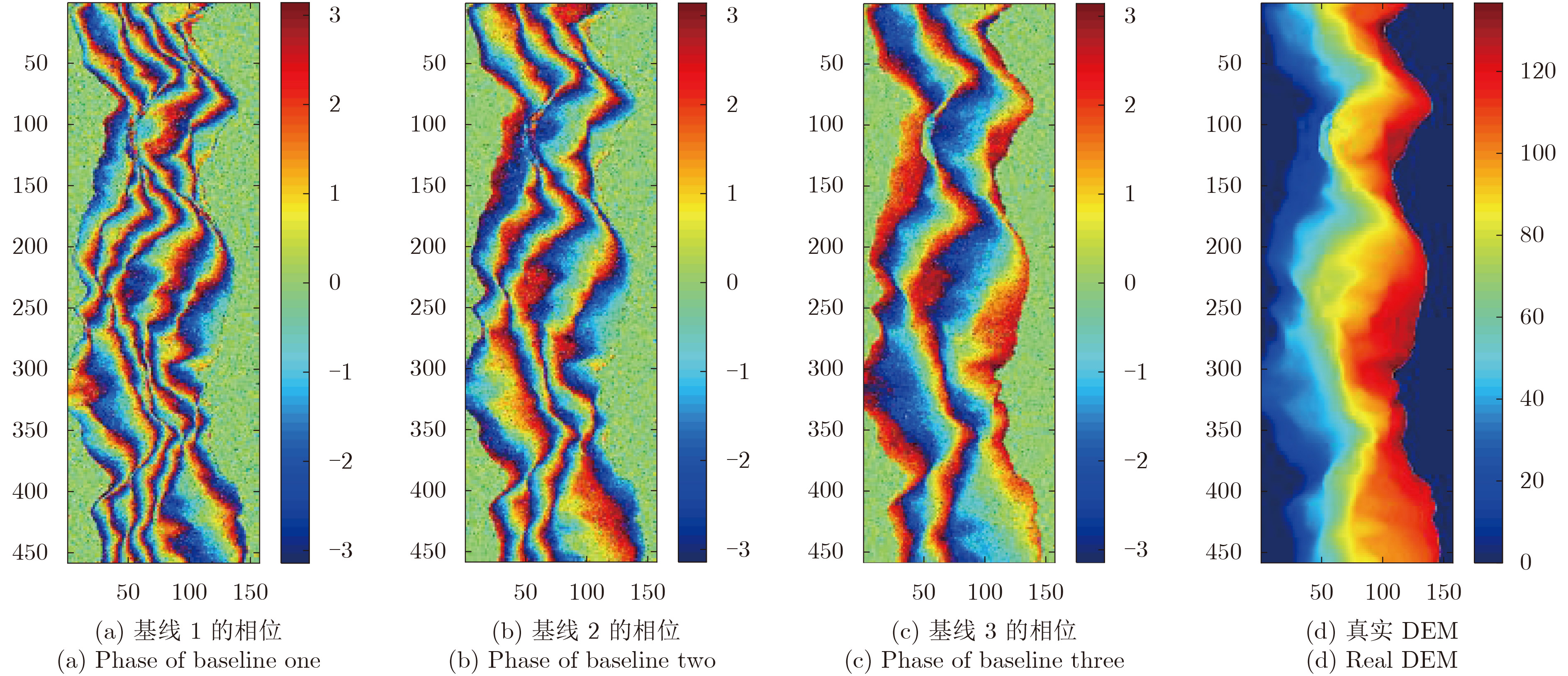
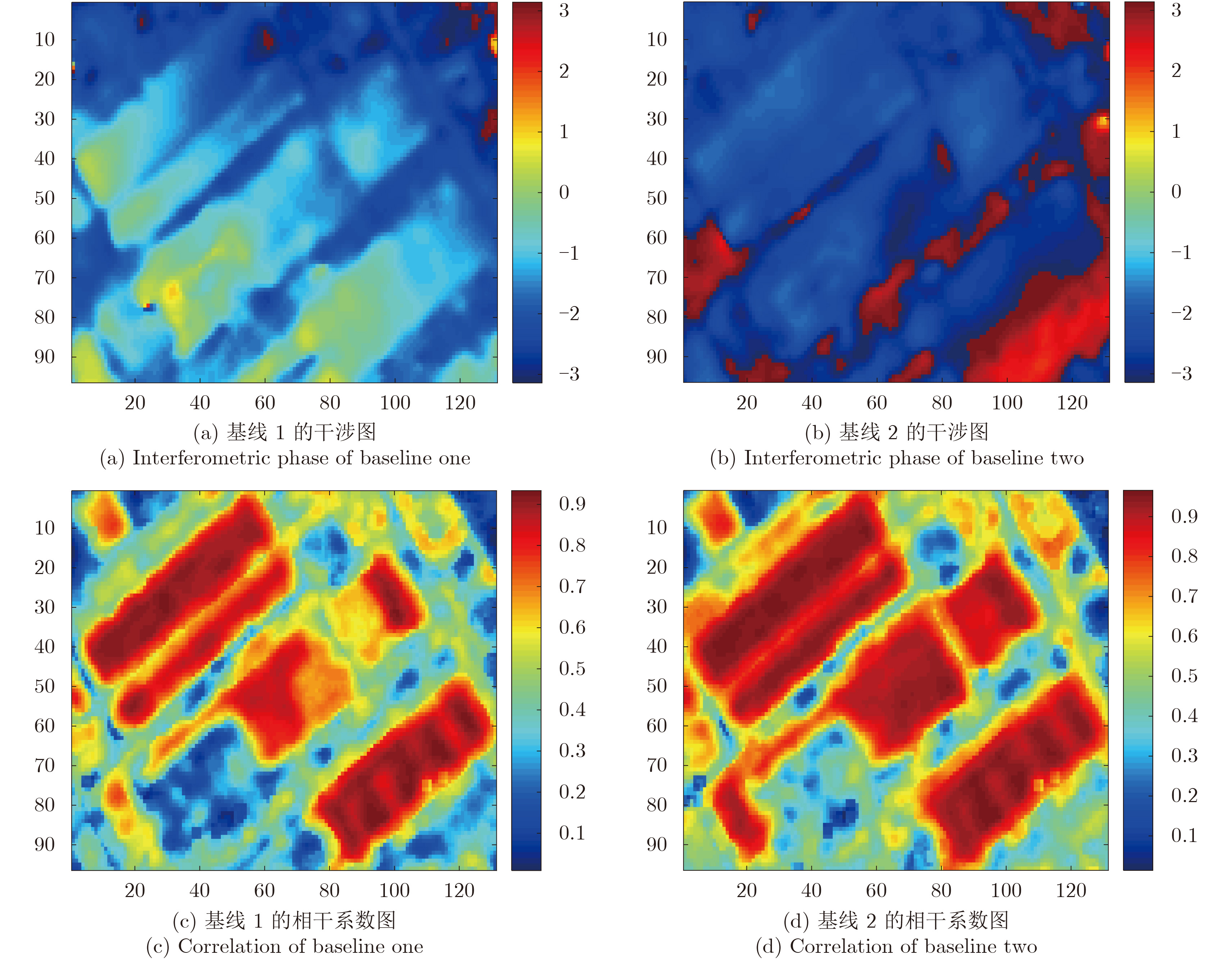
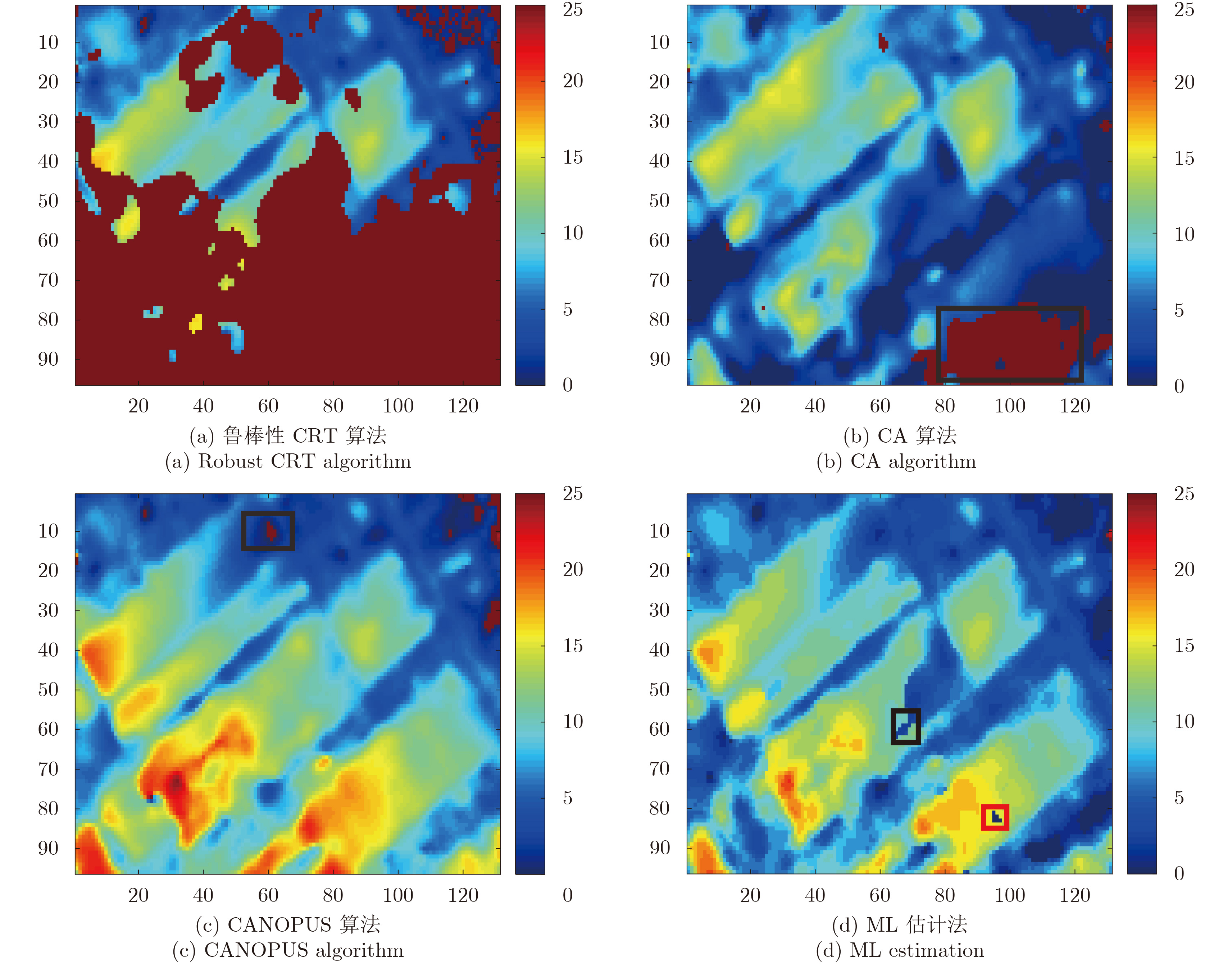
多基线干涉SAR能有效减小由目标高度急剧变化和较大噪声干扰带来的不利影响,可以获取比单基线干涉SAR更精确的地表数字高程模型(DEM)。传统的基于最大似然估计(ML)的多基线高度重建算法在通道数目较少情况下重建结果不佳,基于最大后验估计(MAP)的多基线高度重建算法存在运行时间较长的问题,针对以上问题,该文提出了一种基于最大后验框架的聚类分析高度重建算法(CABMAP)。该算法首先利用了ML估计法得到粗略的DEM,以此为基础在每次迭代过程中利用聚类分析(CA)判断出邻域内的噪声像素,并通过计算后验概率完成重建,此外采用了一种改进措施提高精度。这样,既保留了ML估计法运行速度快的特征,又具有MAP估计法精度高的优点。经实验验证,该算法精度较好且运行效率较高。
多基线干涉SAR能有效减小由目标高度急剧变化和较大噪声干扰带来的不利影响,可以获取比单基线干涉SAR更精确的地表数字高程模型(DEM)。传统的基于最大似然估计(ML)的多基线高度重建算法在通道数目较少情况下重建结果不佳,基于最大后验估计(MAP)的多基线高度重建算法存在运行时间较长的问题,针对以上问题,该文提出了一种基于最大后验框架的聚类分析高度重建算法(CABMAP)。该算法首先利用了ML估计法得到粗略的DEM,以此为基础在每次迭代过程中利用聚类分析(CA)判断出邻域内的噪声像素,并通过计算后验概率完成重建,此外采用了一种改进措施提高精度。这样,既保留了ML估计法运行速度快的特征,又具有MAP估计法精度高的优点。经实验验证,该算法精度较好且运行效率较高。



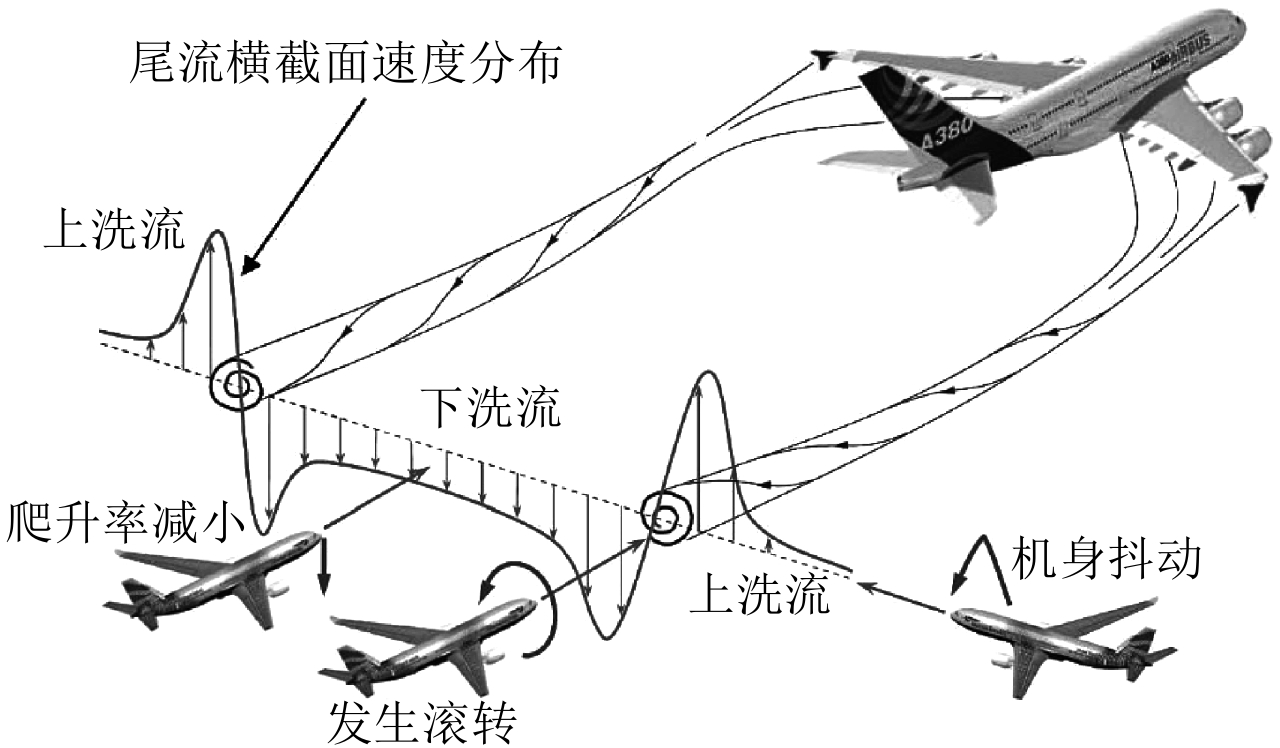


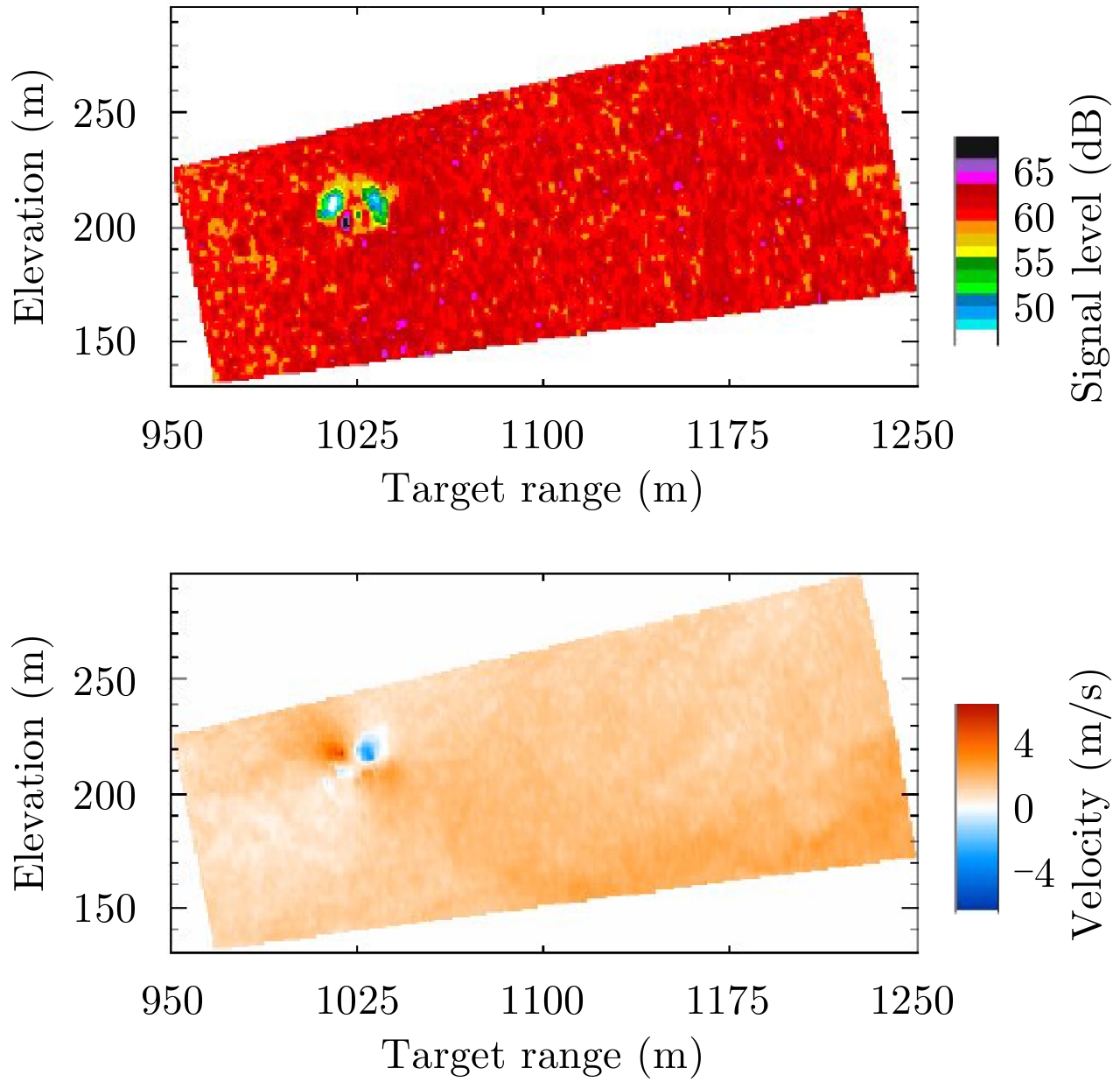


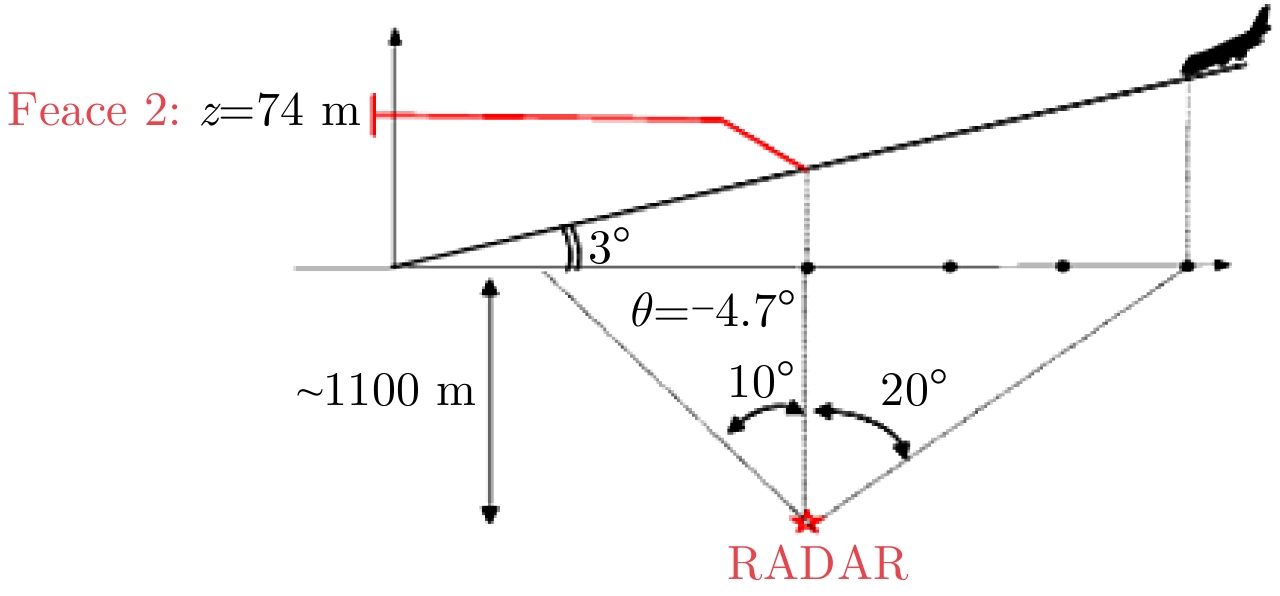
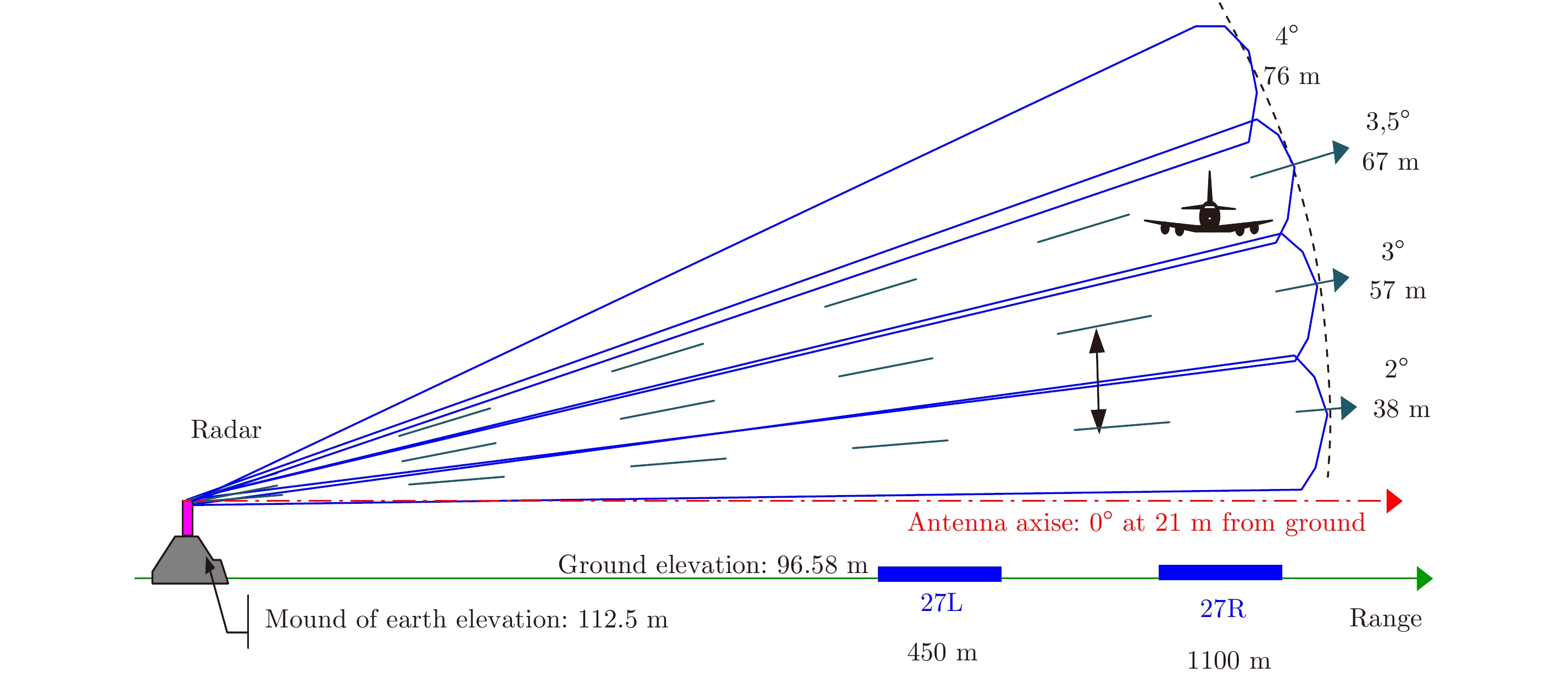


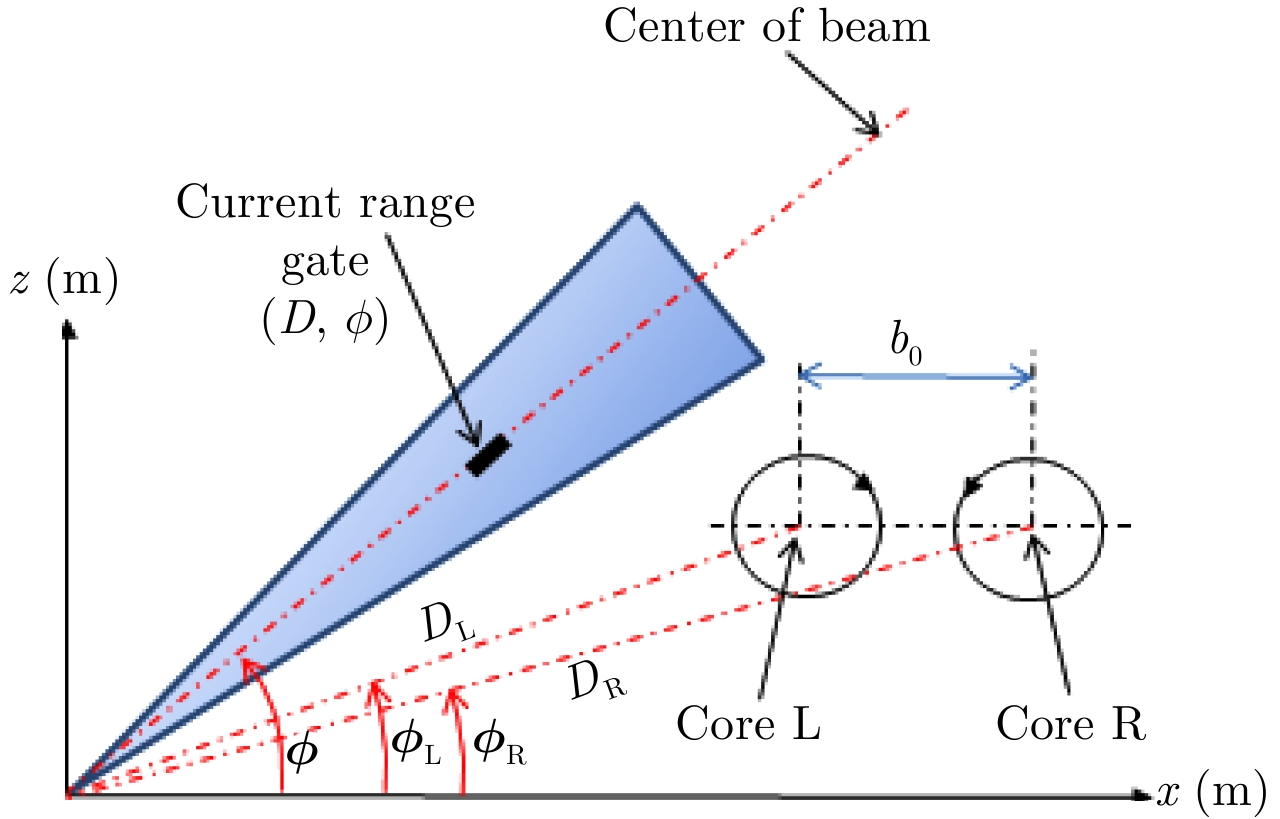



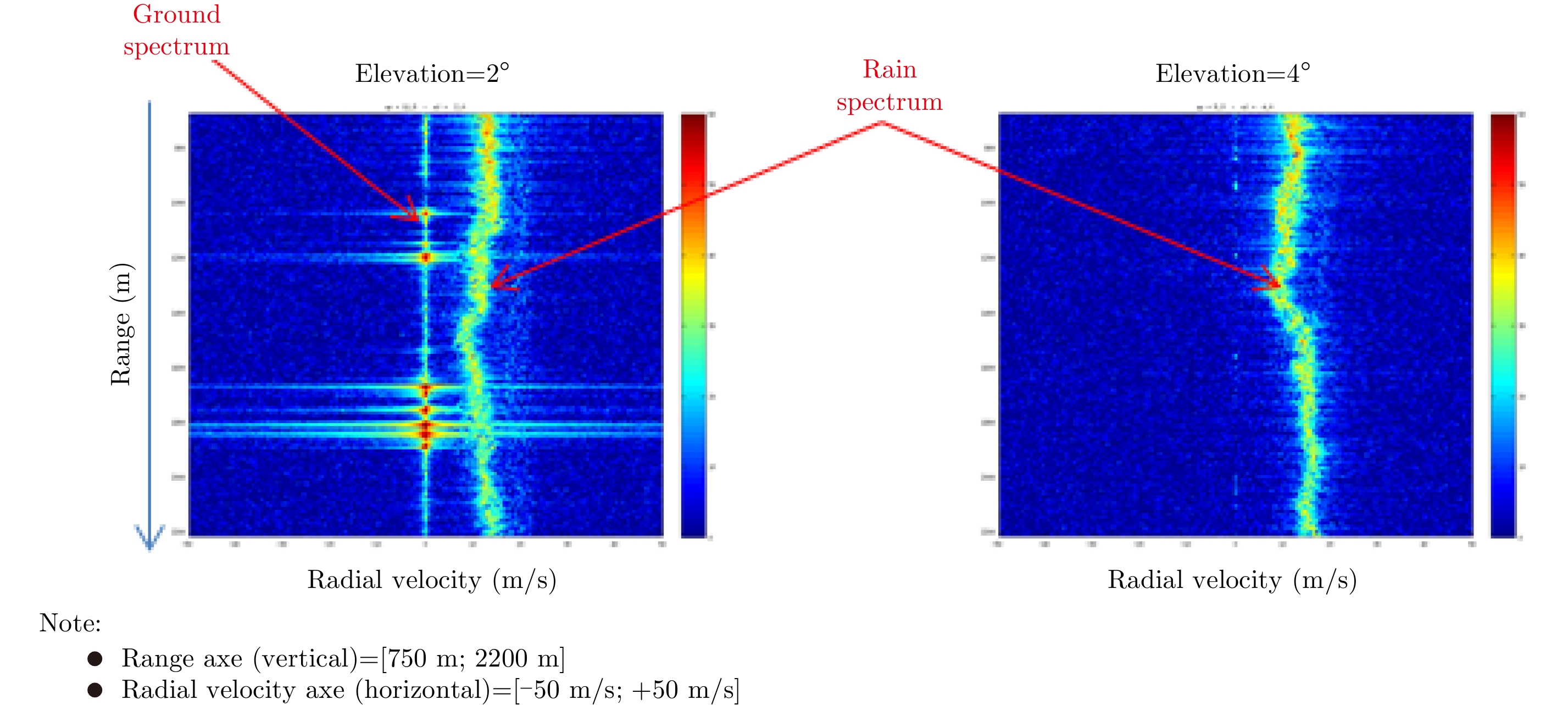

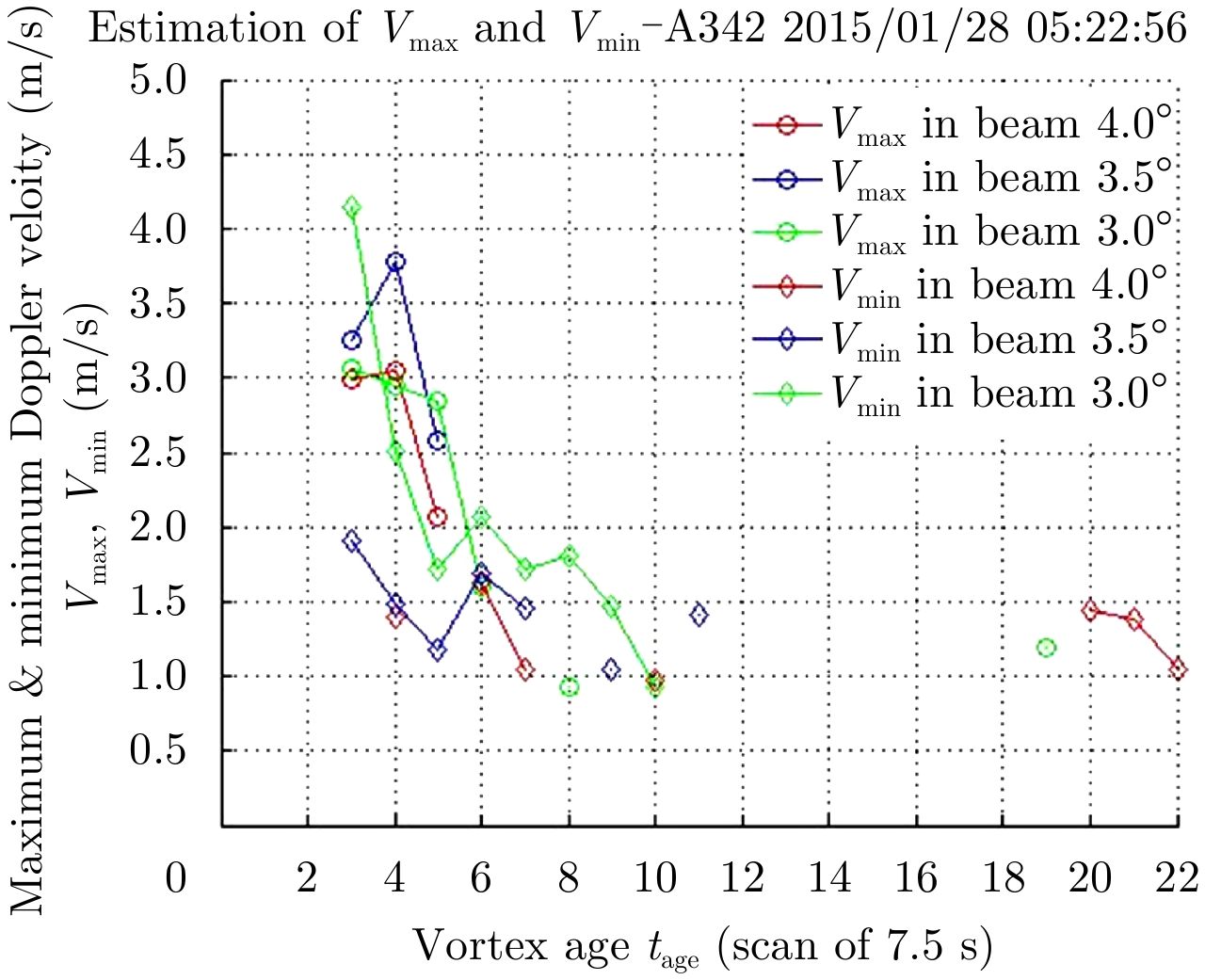
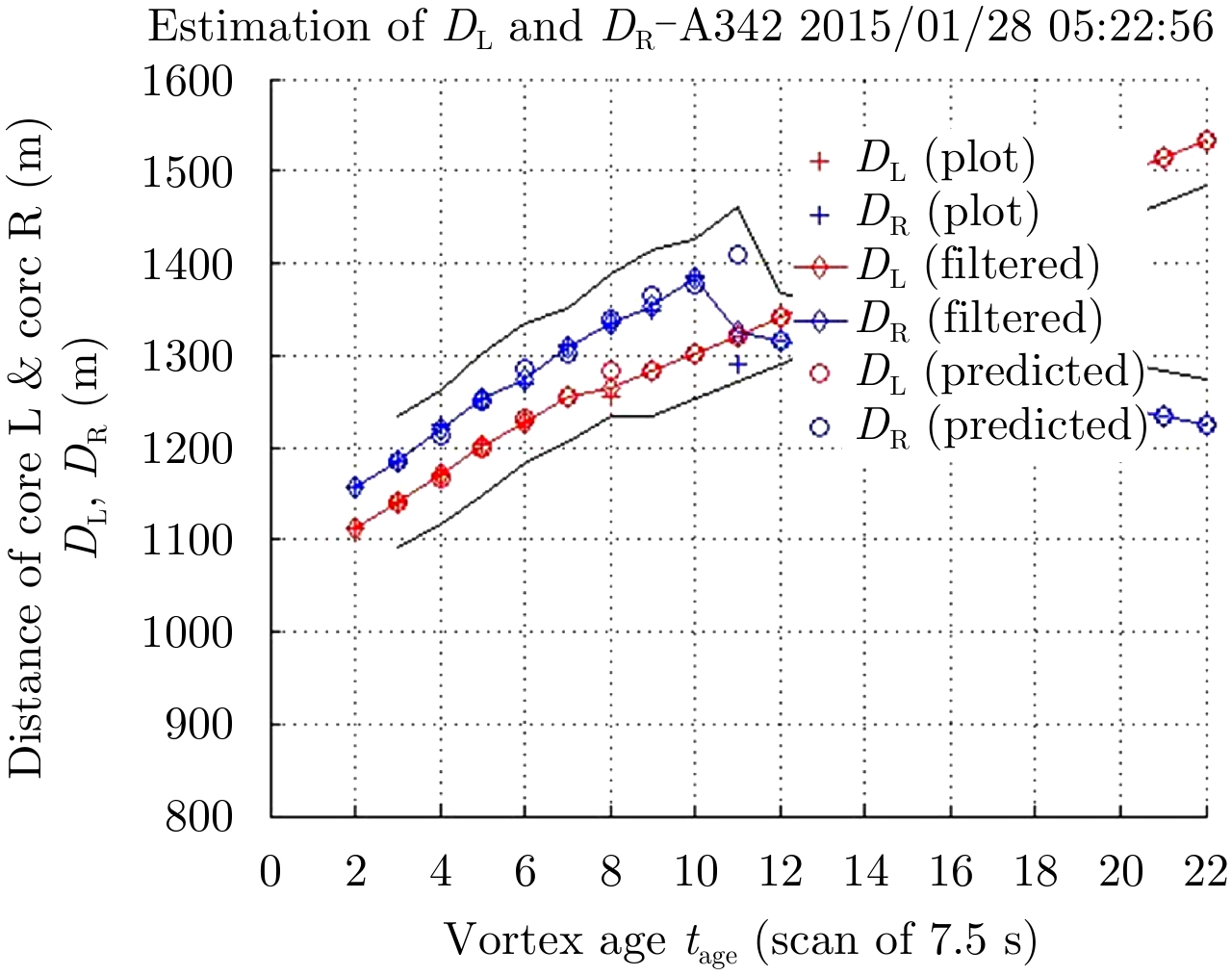
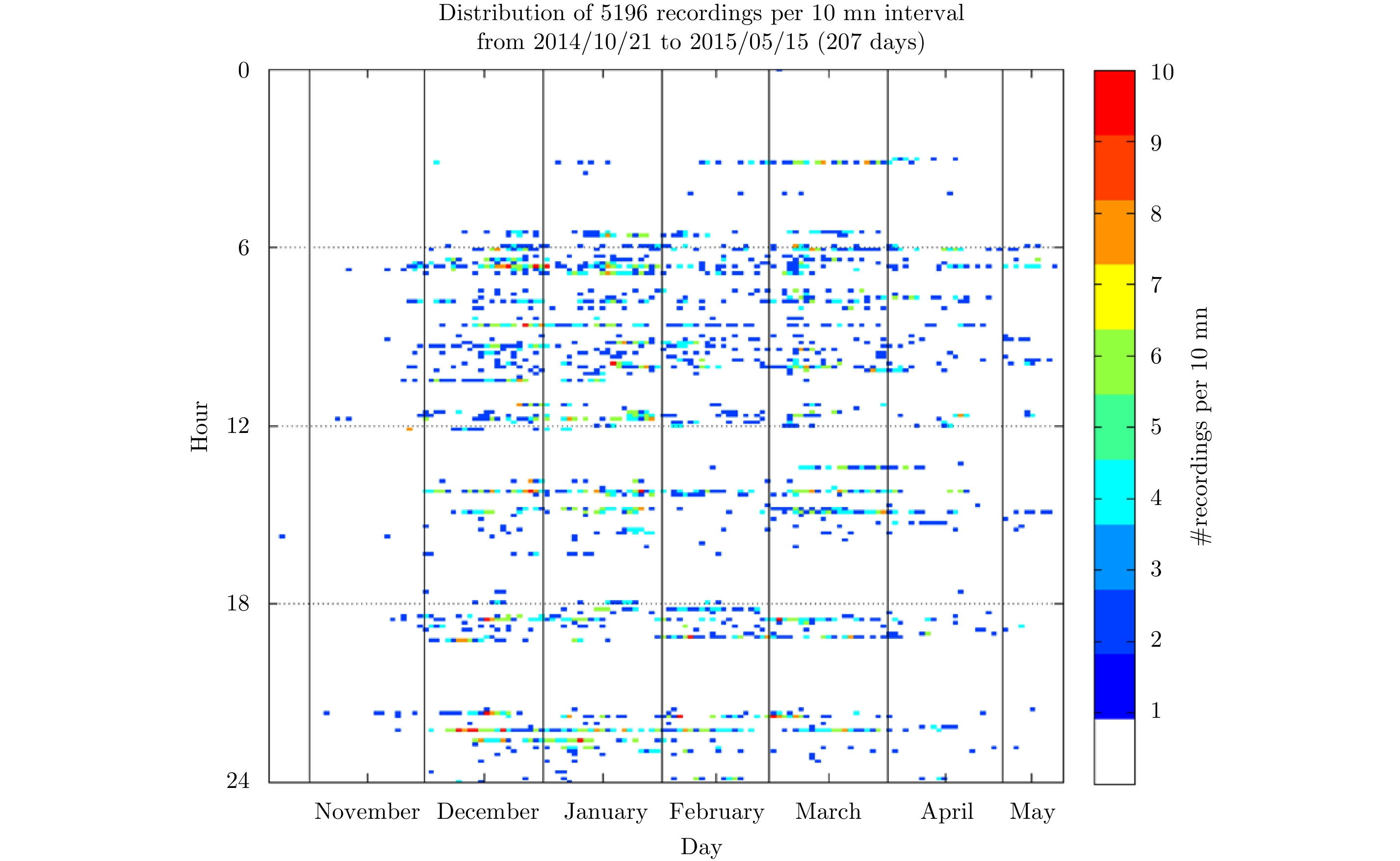
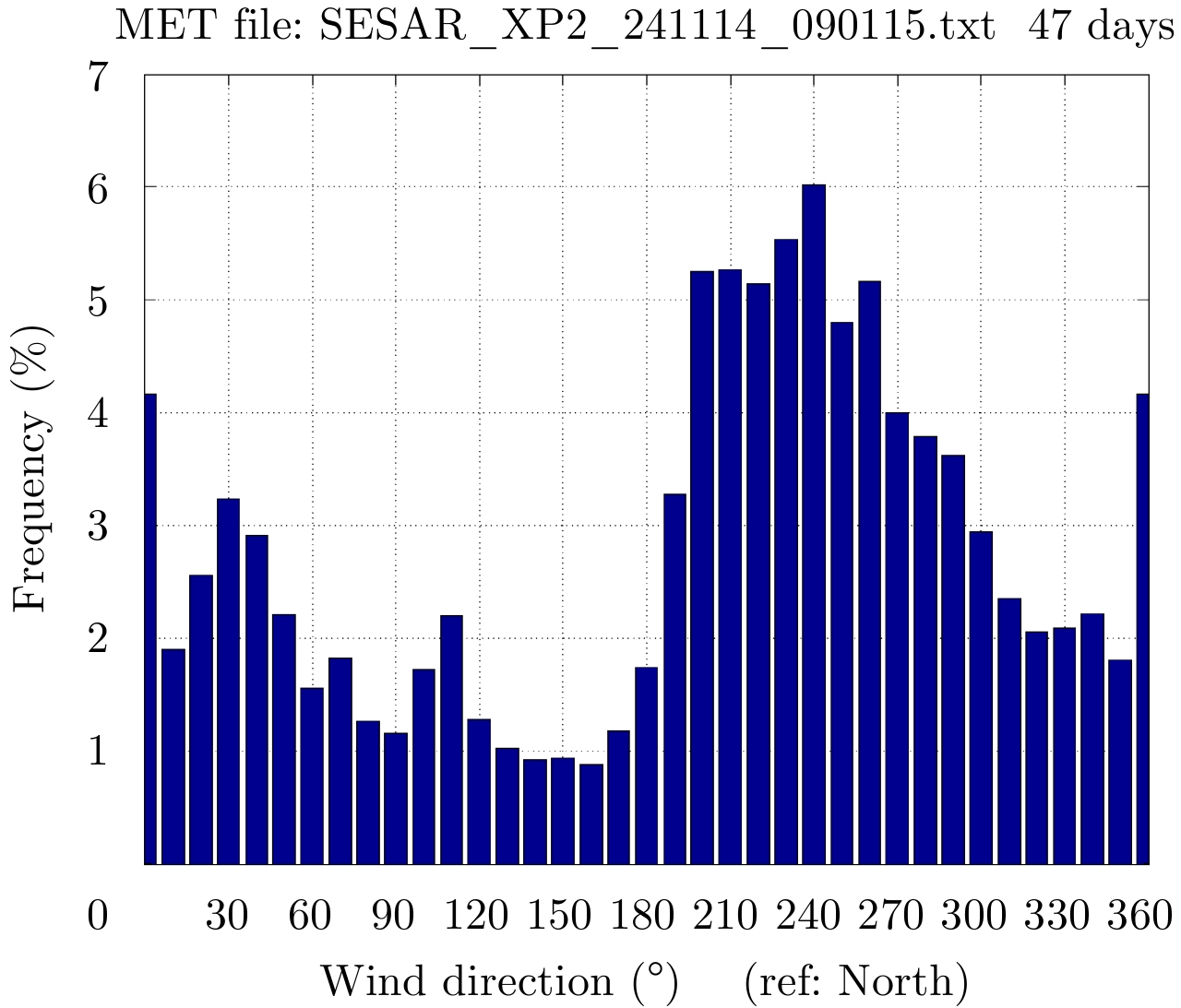
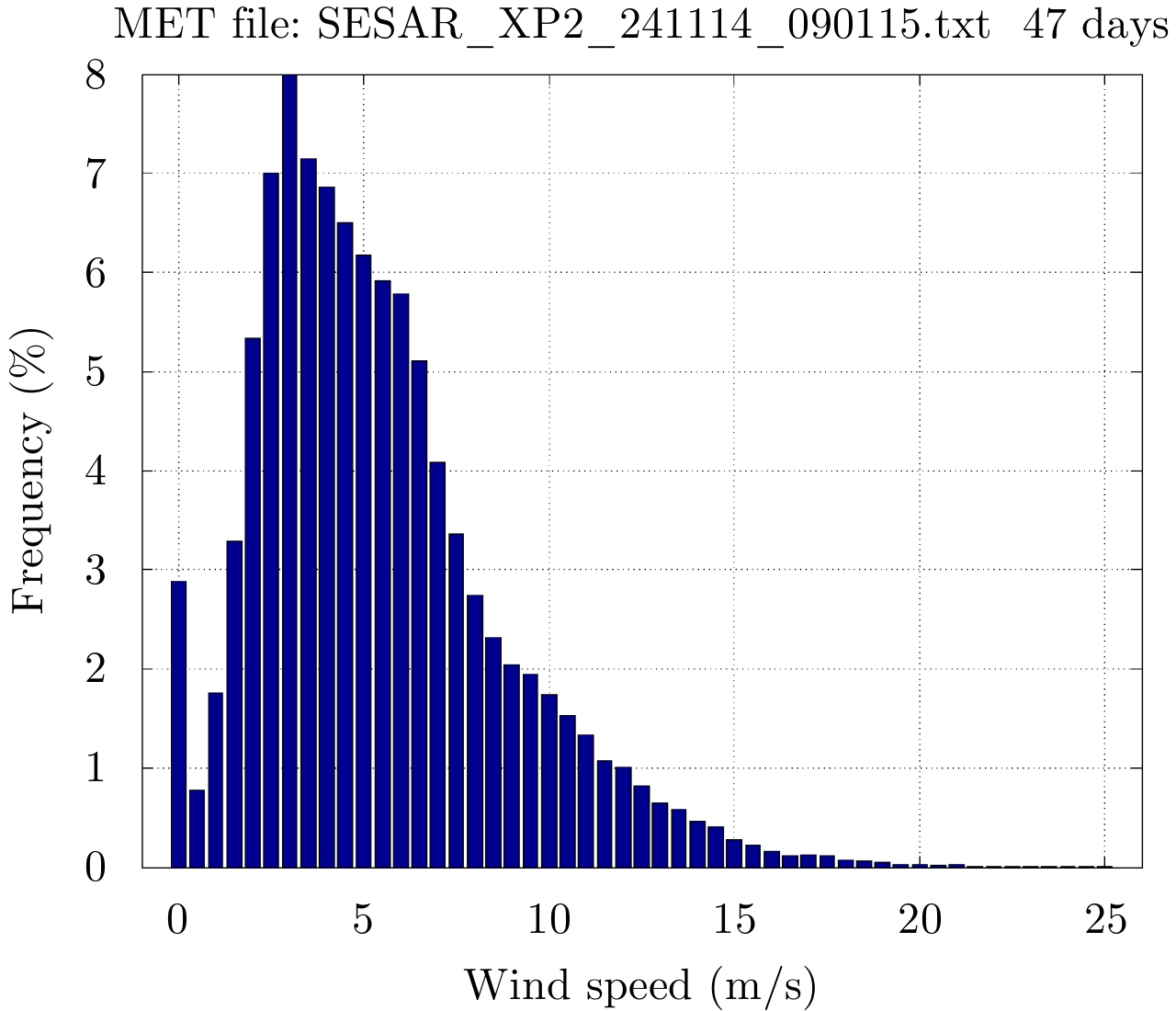
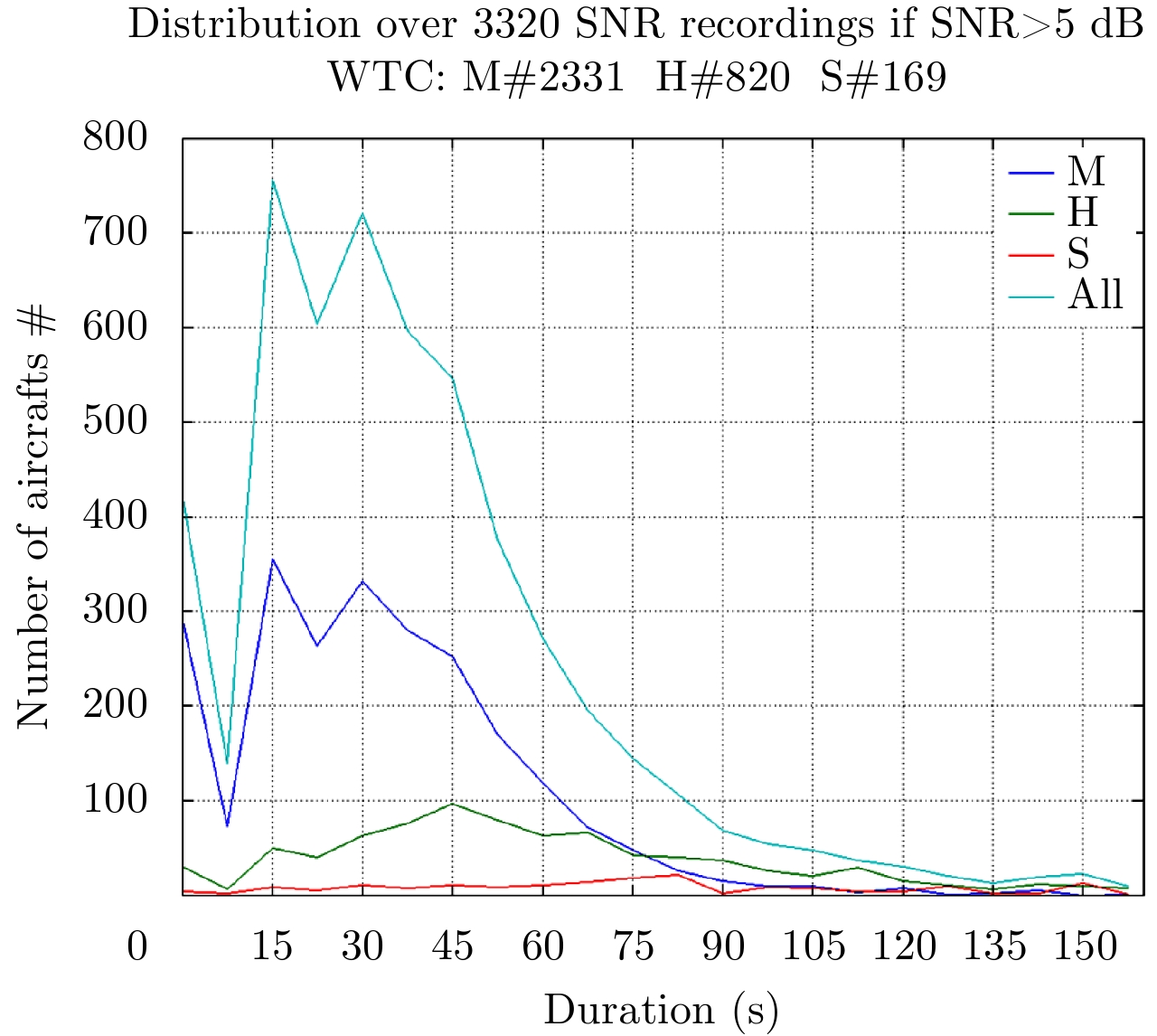

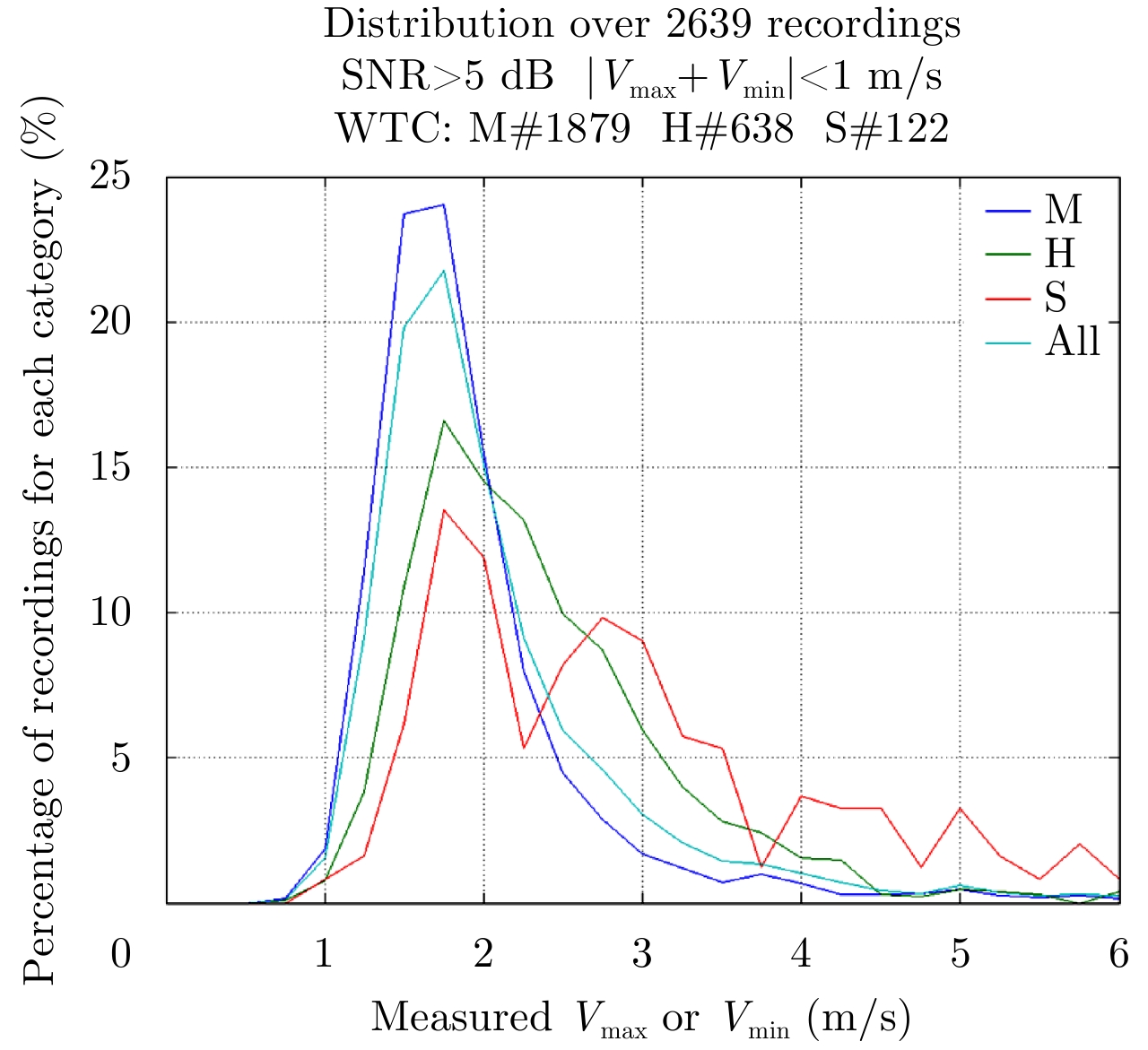
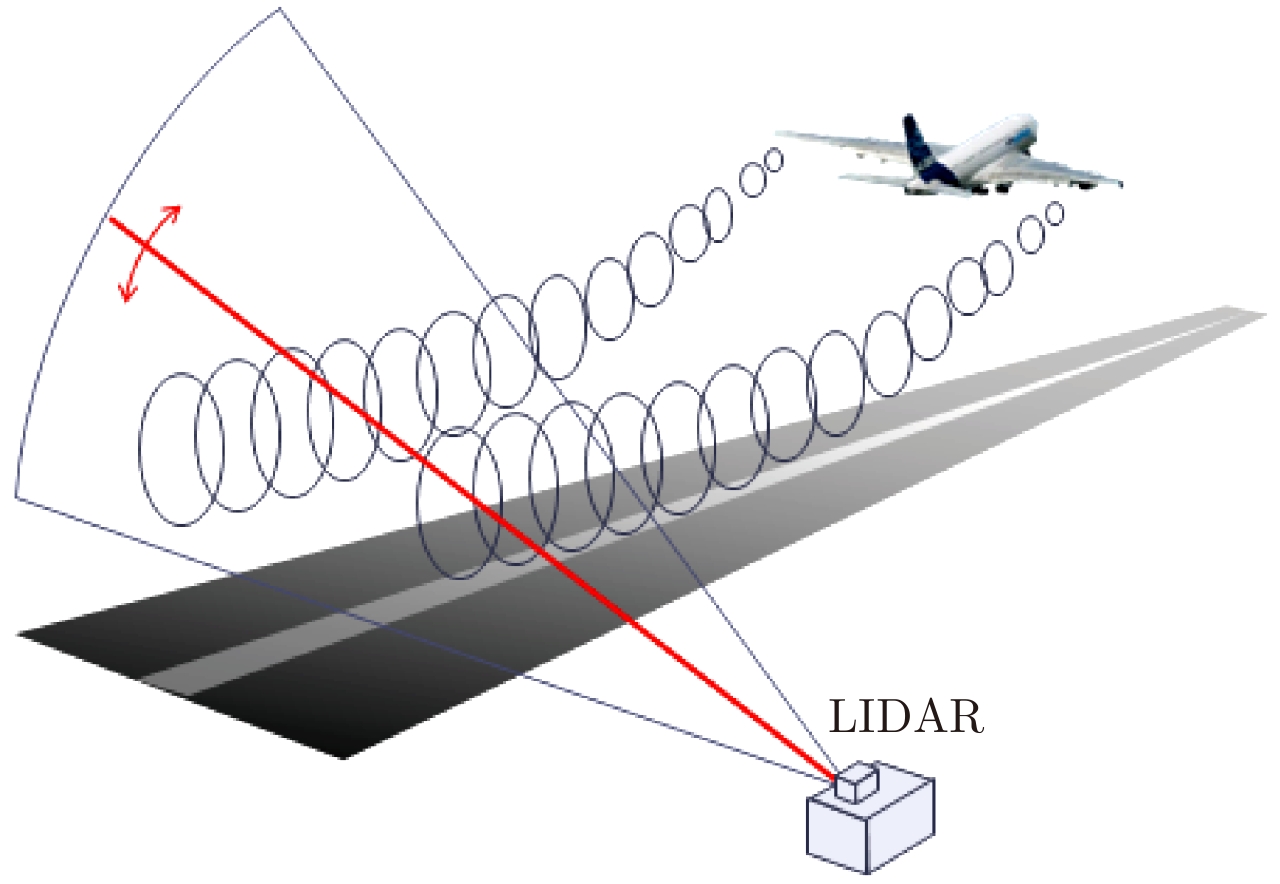

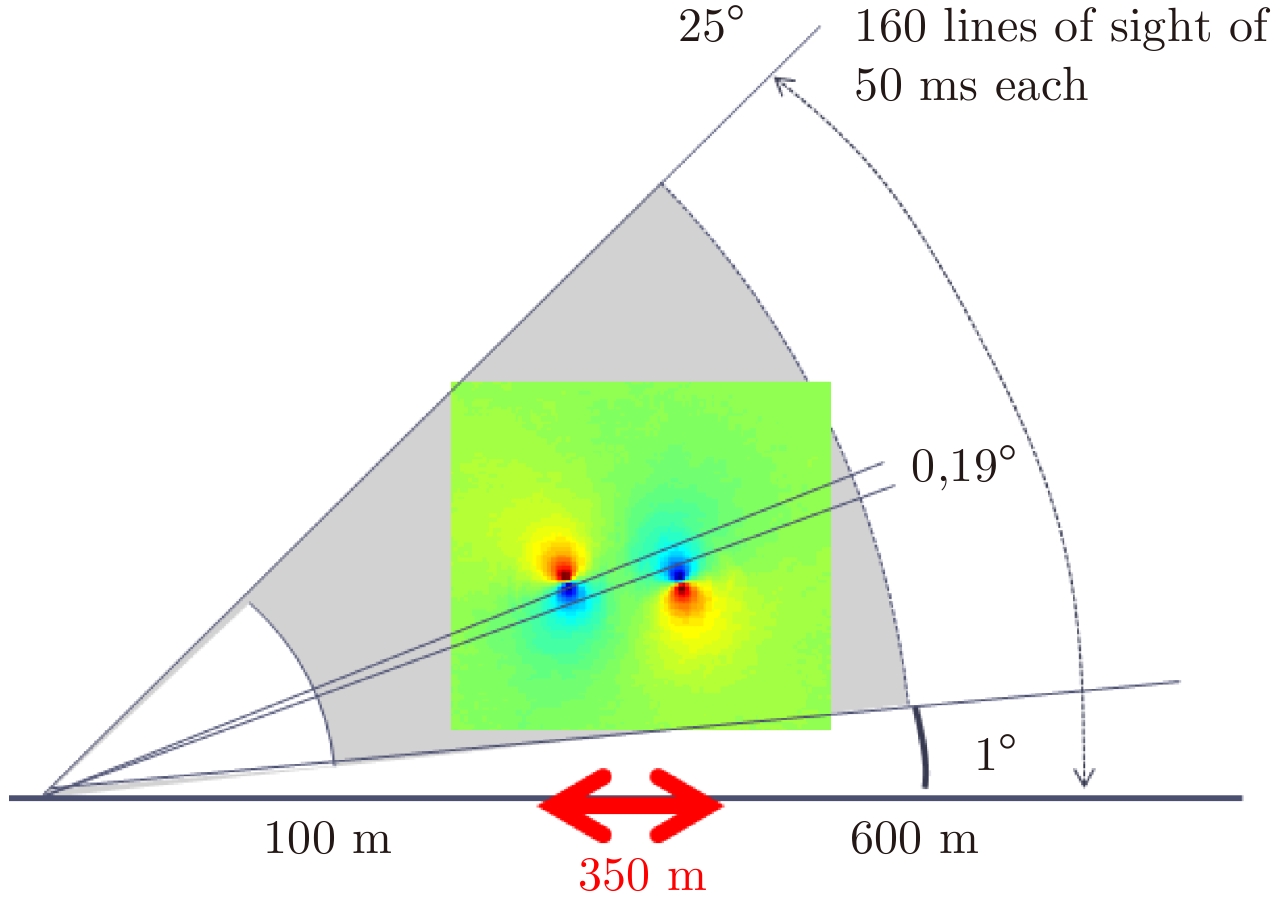
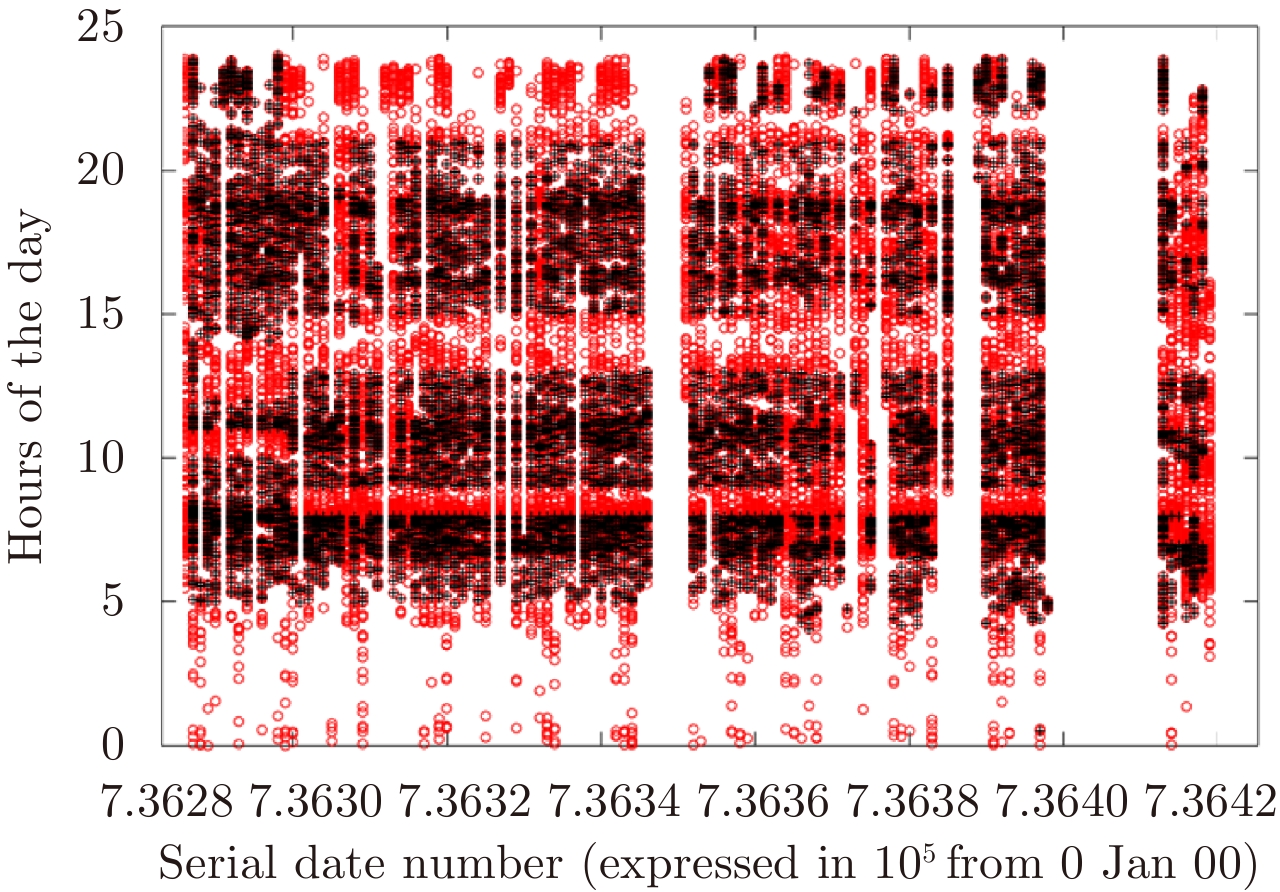
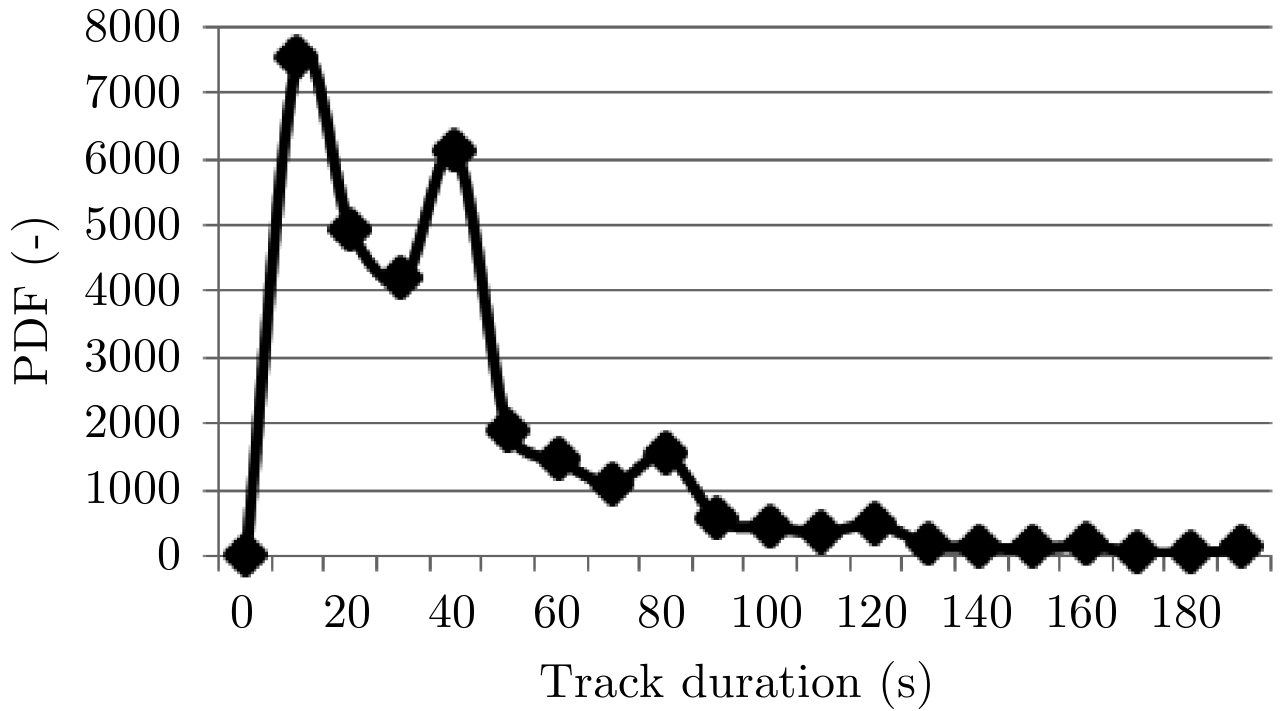
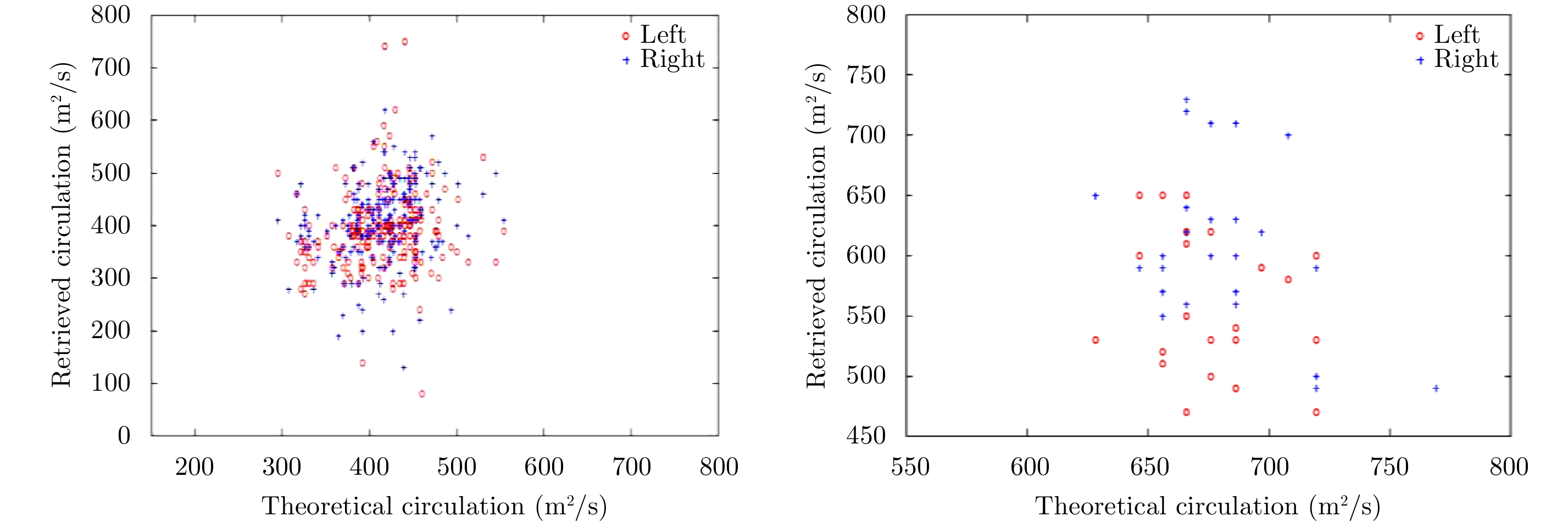
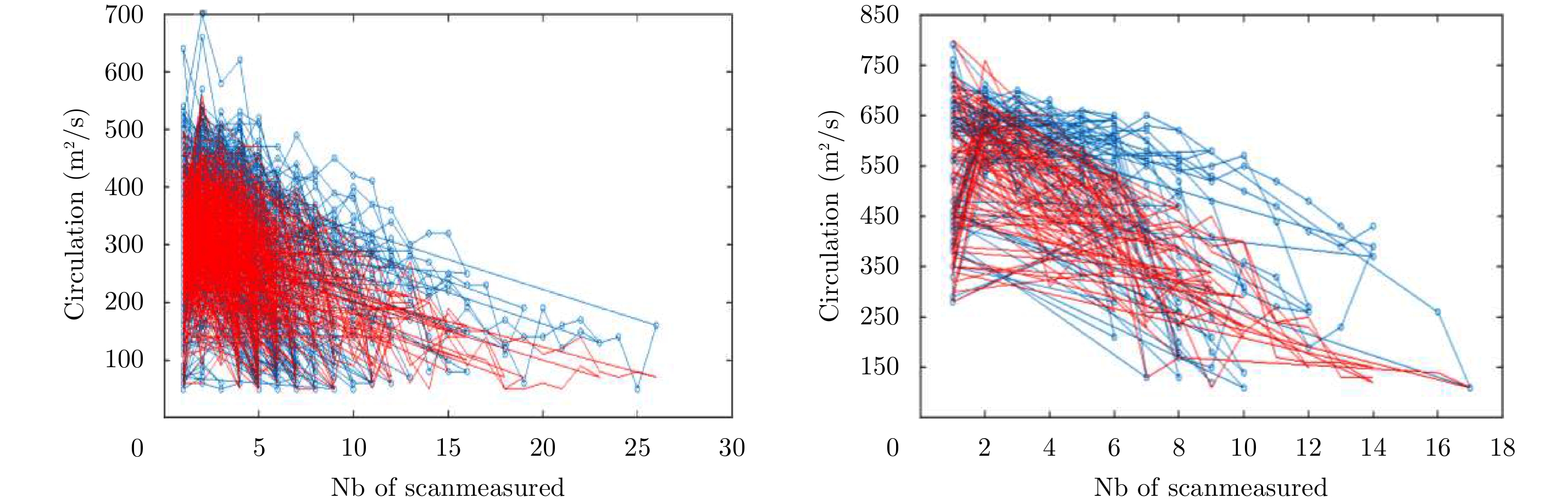

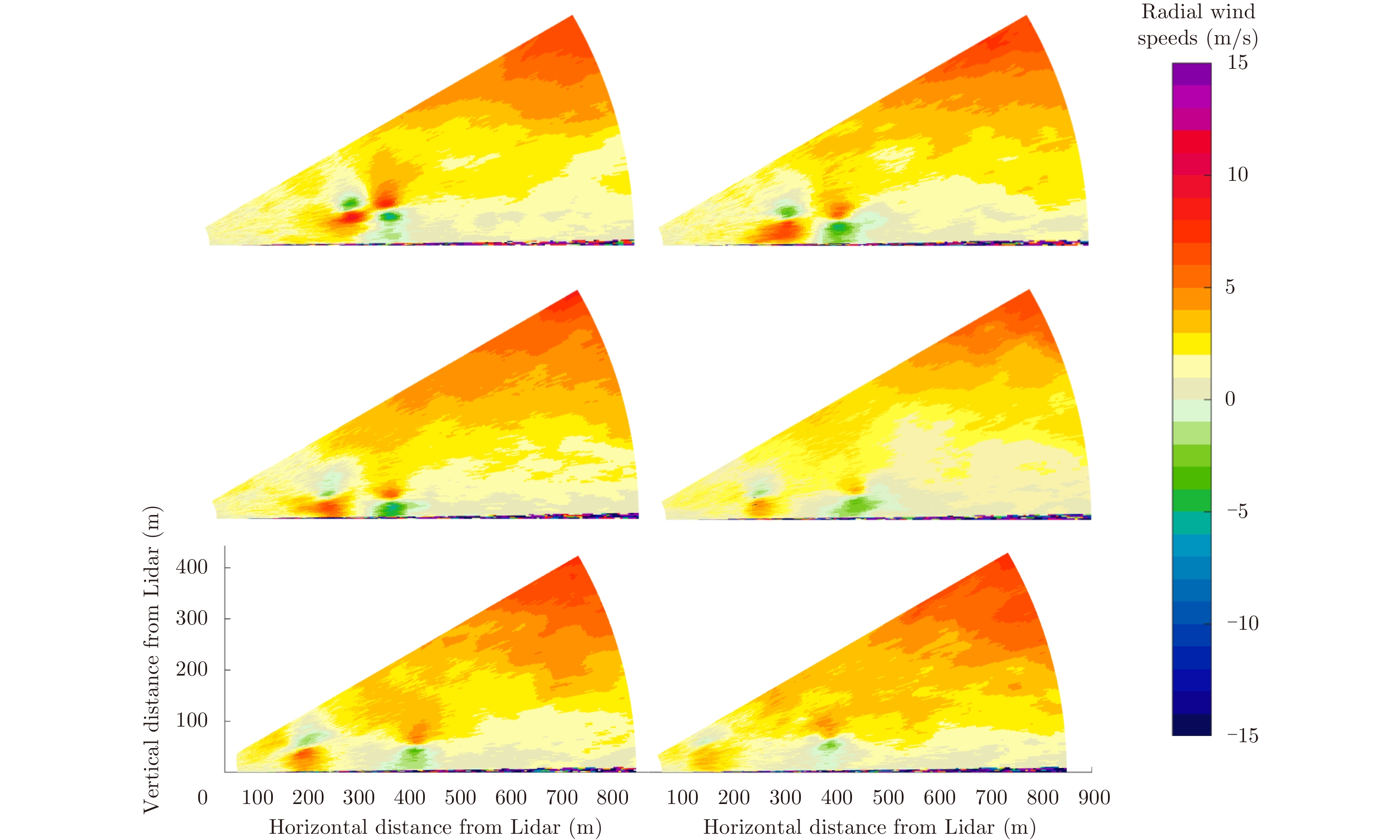
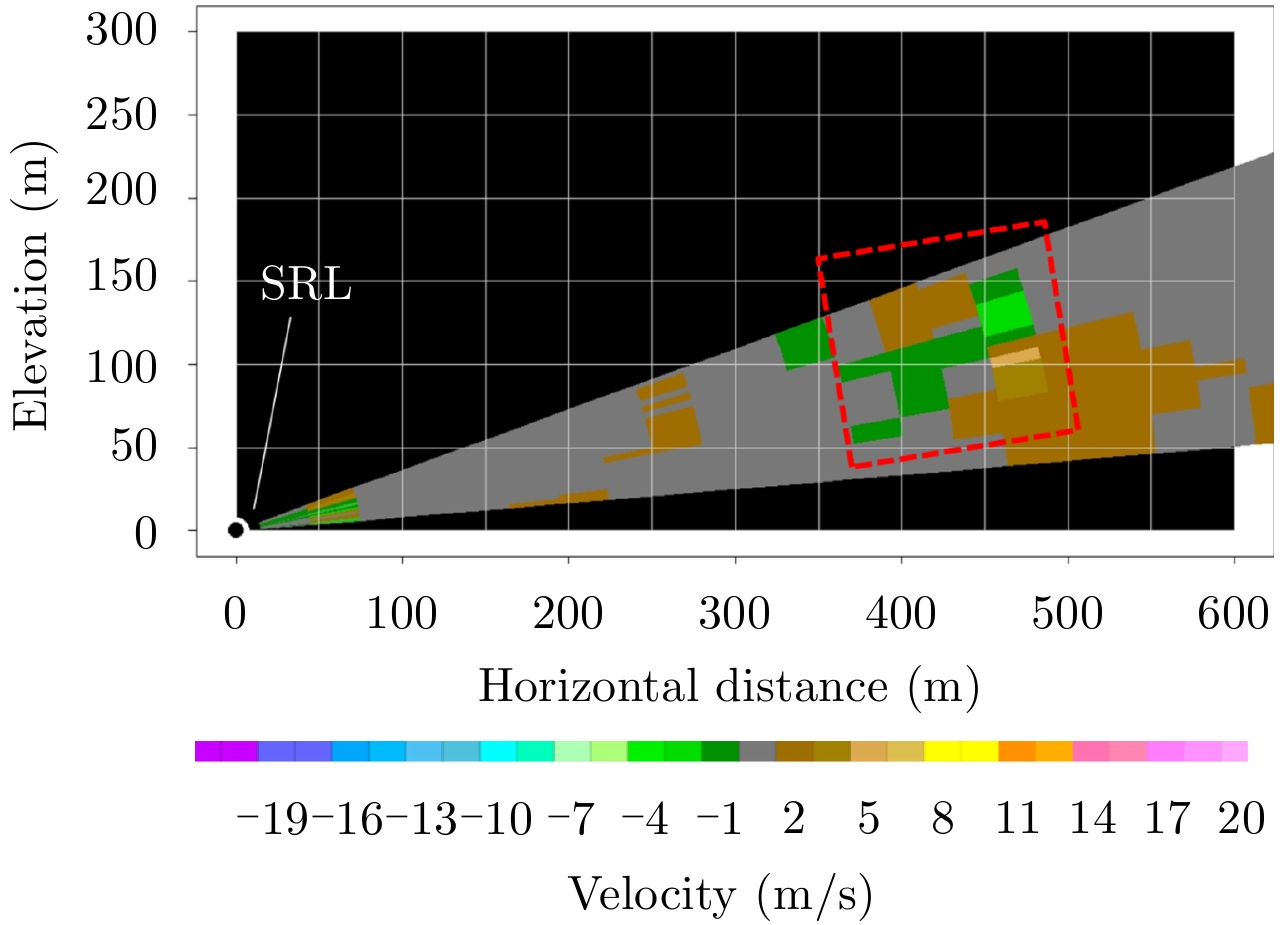
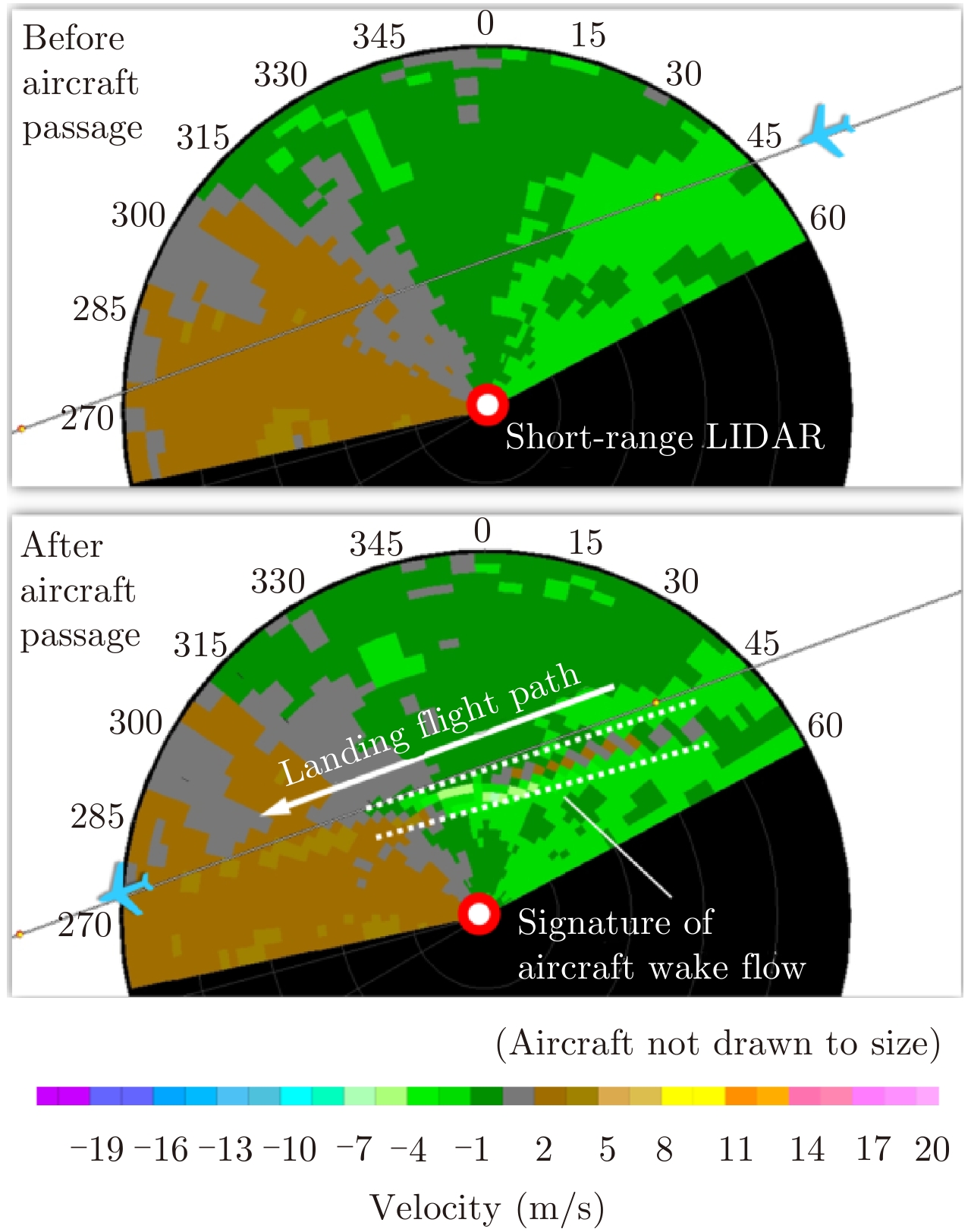
香港国际机场是世界上其中一个最繁忙的机场,其总航班升降量在2016年已超越400,000次。香港天文台除为香港国际机场提供航空气象服务外,近年亦开始利用短程激光雷达作飞机尾涡观测,并取得了初步的成果。该文介绍天文台在2014至2016年间的观测计划及初步数据分析结果,亦讨论香港国际机场飞机尾涡监测和预报技术的发展动向。 香港国际机场是世界上其中一个最繁忙的机场,其总航班升降量在2016年已超越400,000次。香港天文台除为香港国际机场提供航空气象服务外,近年亦开始利用短程激光雷达作飞机尾涡观测,并取得了初步的成果。该文介绍天文台在2014至2016年间的观测计划及初步数据分析结果,亦讨论香港国际机场飞机尾涡监测和预报技术的发展动向。







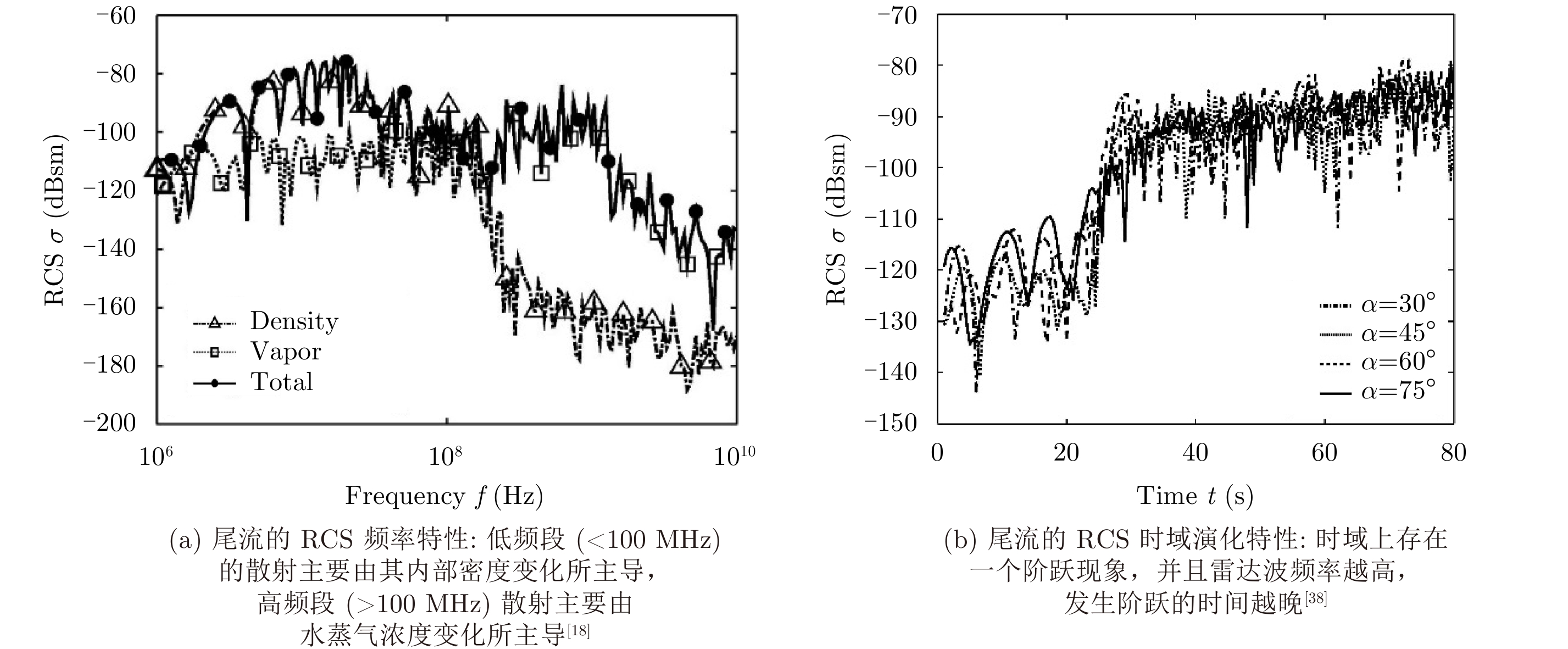
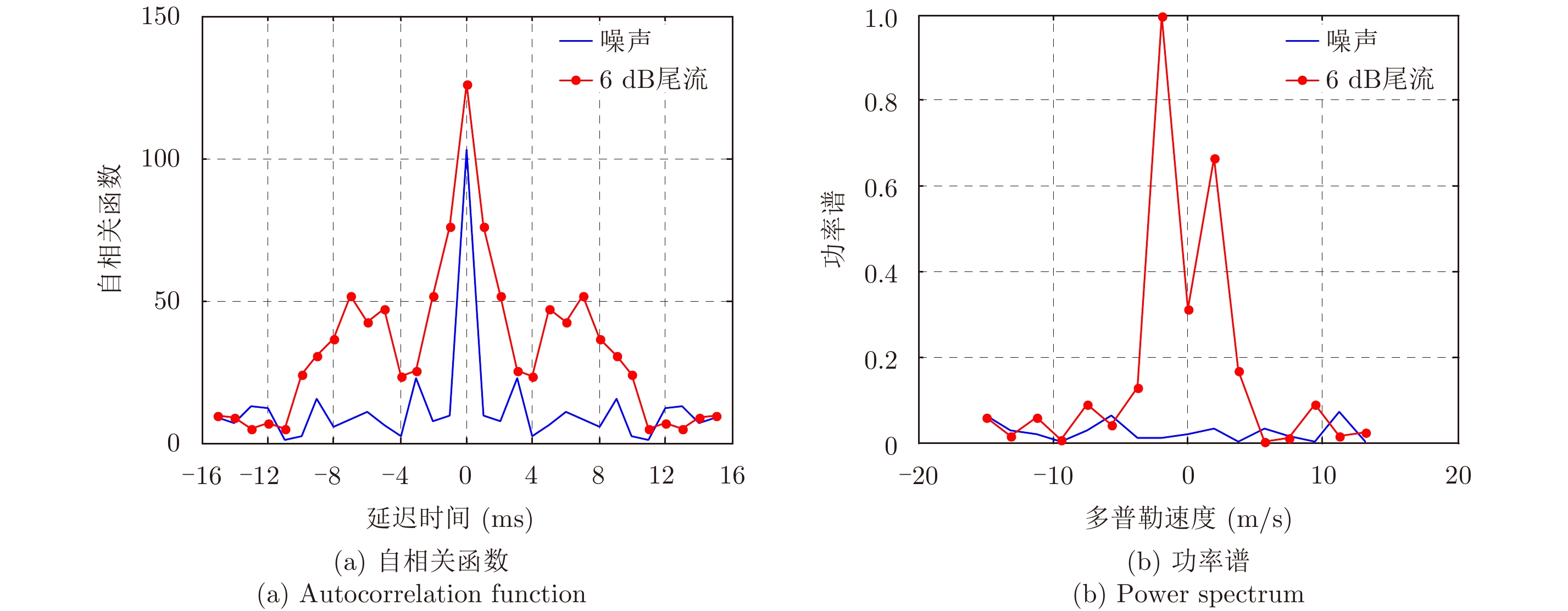
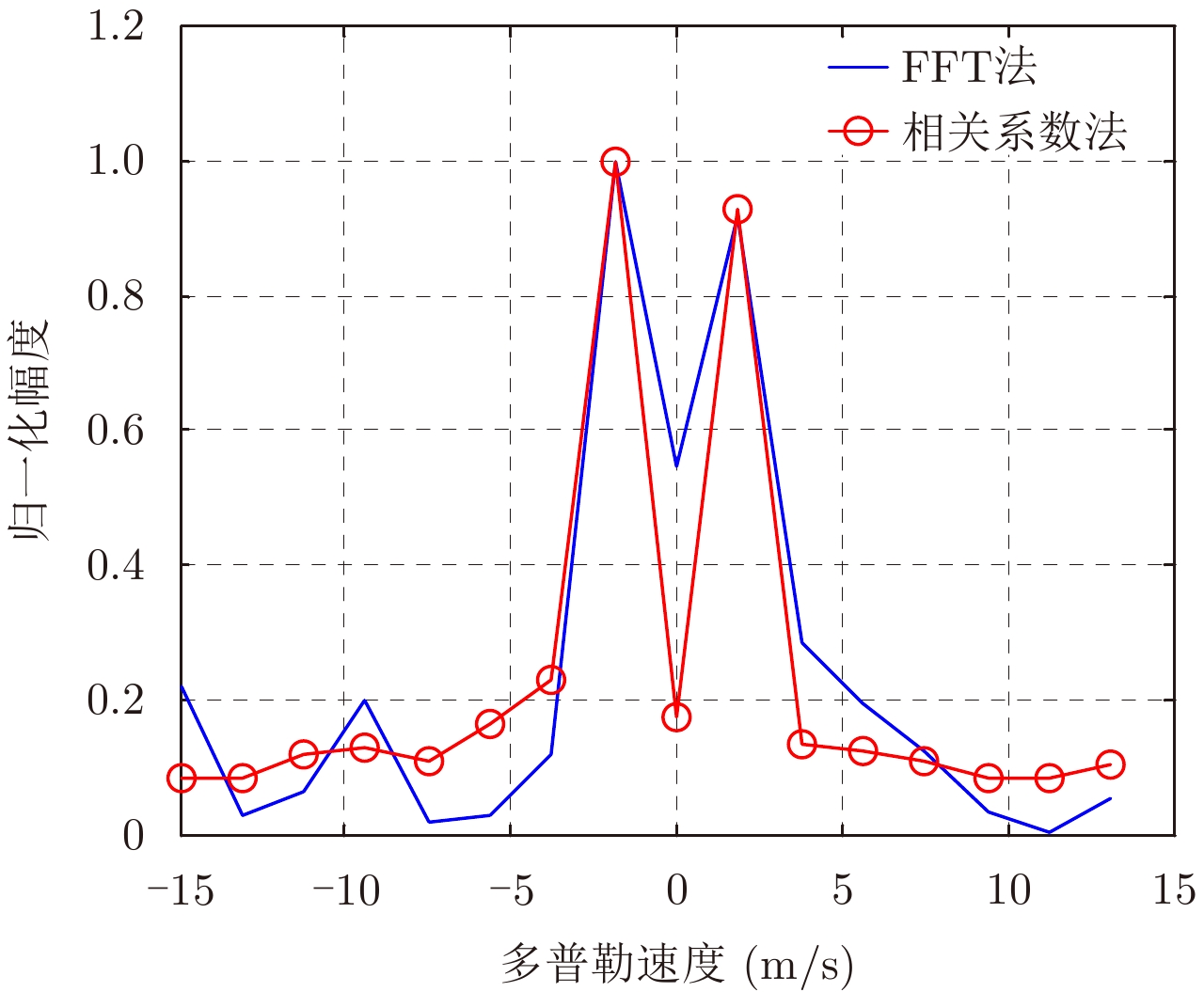
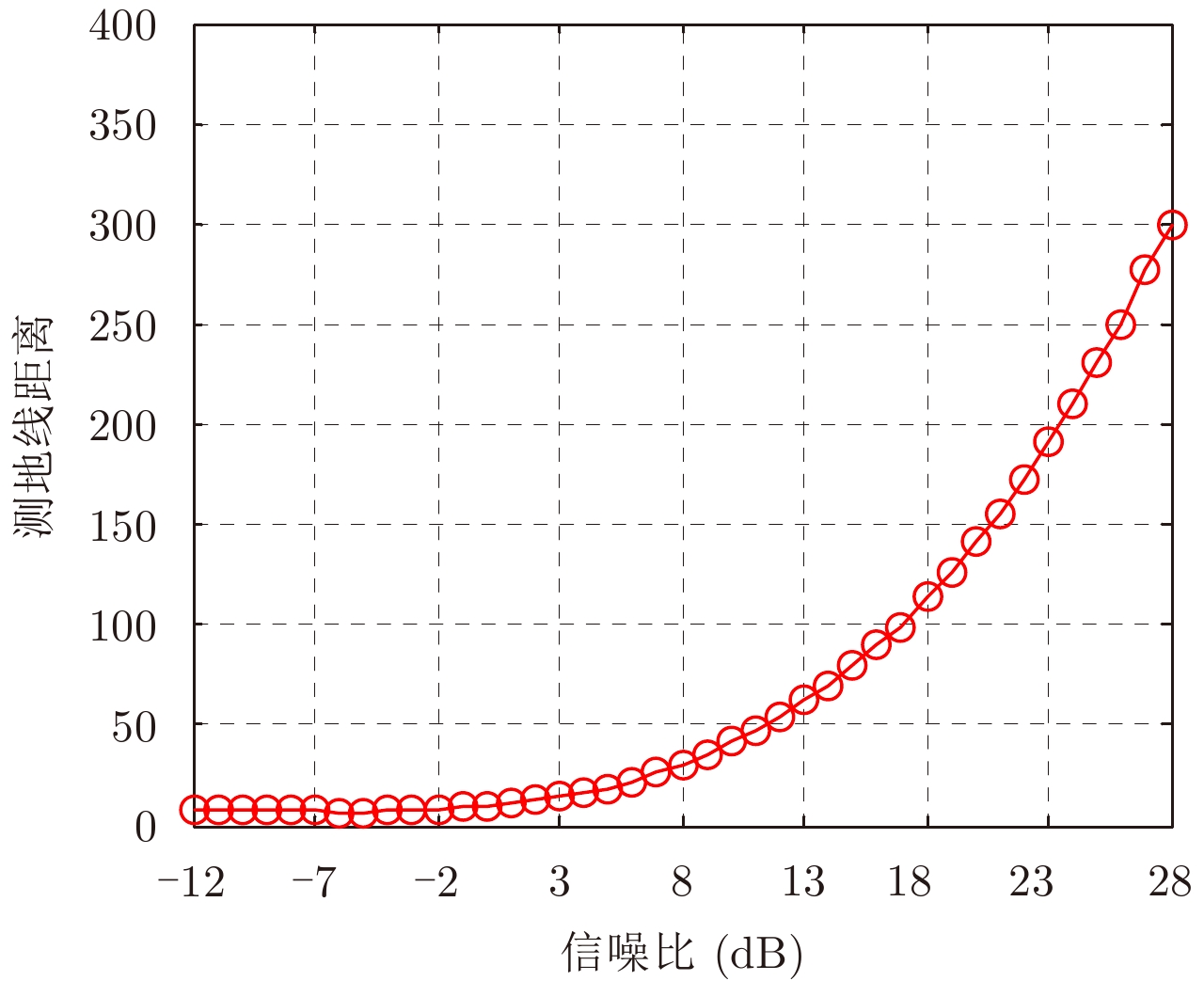
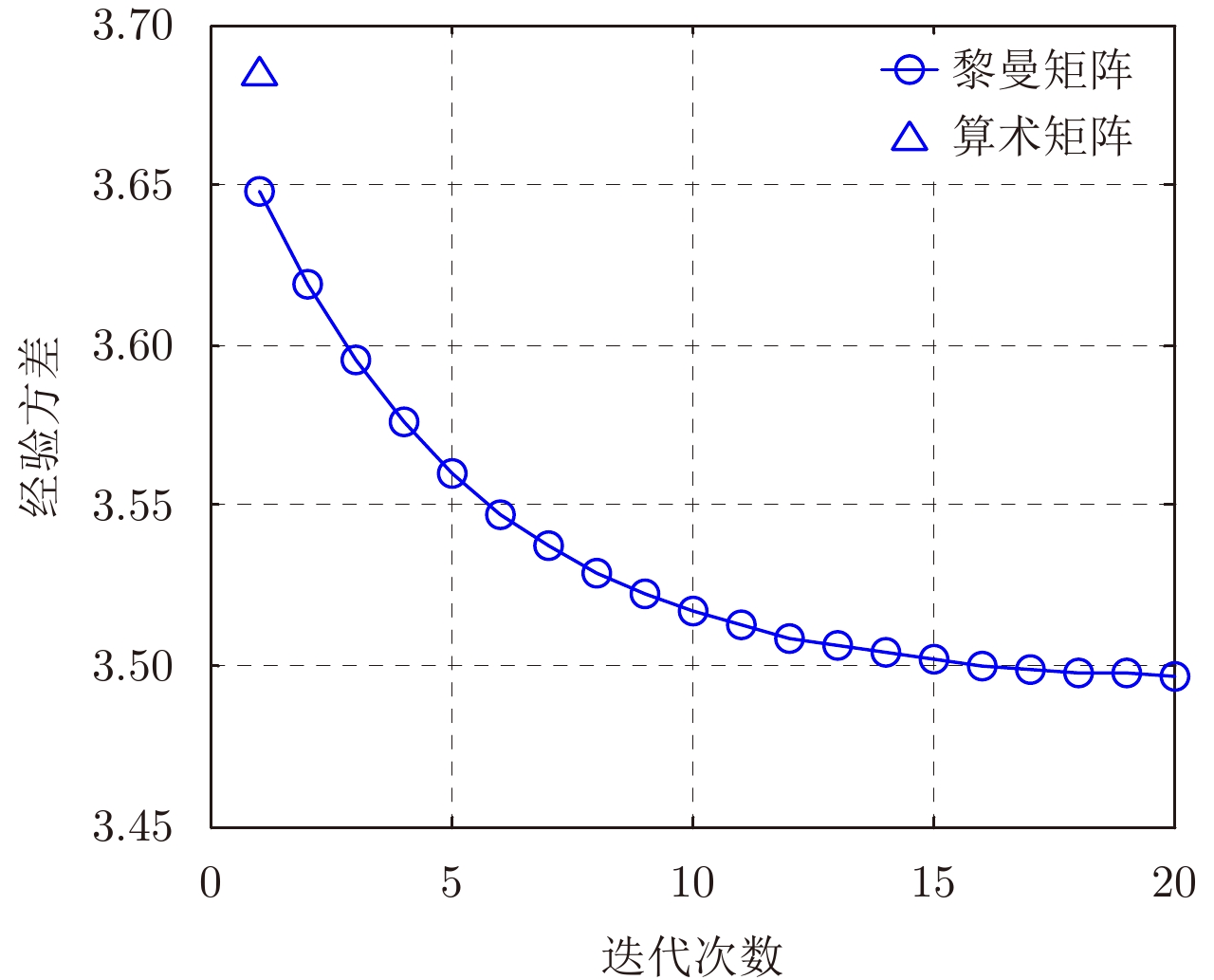
矩阵信息几何在雷达信号处理和目标检测中的应用是一个正在引起关注的研究方向。飞机尾流回波经过傅里叶变换后,其功率谱是展宽的,传统动目标检测(MTD)方法未能对展宽的功率谱进行有效积累。针对飞机尾流目标检测问题,基于矩阵信息几何理论,该文提出了一种矩阵恒虚警率(CFAR)检测方法,该方法中观测数据协方差矩阵构成一个矩阵流形,类比CFAR检测的思想,利用检测单元协方差矩阵与参考单元协方差矩阵均值间定义的距离作为检测统计量。最后利用噪声中仿真的尾流回波数据,分析了黎曼均值的迭代估计性能、尾流目标协方差矩阵与噪声协方差矩阵的测地线距离随信噪比的变化,比较了常规MTD检测方法和矩阵CFAR检测方法的检测性能。
矩阵信息几何在雷达信号处理和目标检测中的应用是一个正在引起关注的研究方向。飞机尾流回波经过傅里叶变换后,其功率谱是展宽的,传统动目标检测(MTD)方法未能对展宽的功率谱进行有效积累。针对飞机尾流目标检测问题,基于矩阵信息几何理论,该文提出了一种矩阵恒虚警率(CFAR)检测方法,该方法中观测数据协方差矩阵构成一个矩阵流形,类比CFAR检测的思想,利用检测单元协方差矩阵与参考单元协方差矩阵均值间定义的距离作为检测统计量。最后利用噪声中仿真的尾流回波数据,分析了黎曼均值的迭代估计性能、尾流目标协方差矩阵与噪声协方差矩阵的测地线距离随信噪比的变化,比较了常规MTD检测方法和矩阵CFAR检测方法的检测性能。






 微信 | 公众平台
微信 | 公众平台 

