
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
Circulation Retrieval of Wake Vortices under Rainy Conditions with an X Band Radar
DOI: 10.12000/JR17070 cstr: 32380.14.JR17070
-
Abstract:
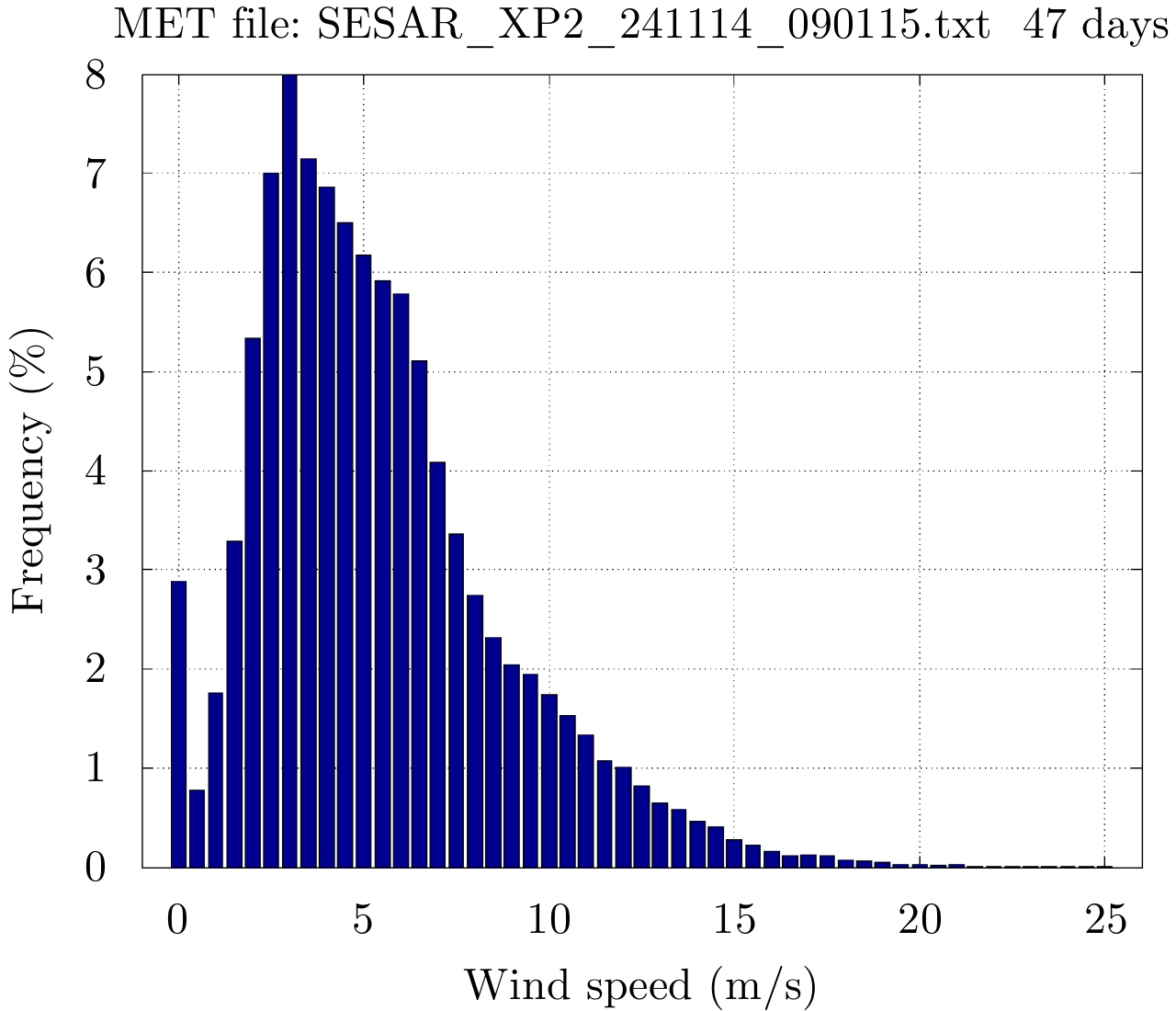
At airports, runway operation is the limiting factor for the overall throughput; specifically the fixed and overly conservative ICAO wake turbulence separation minima. The wake turbulence hazardous flows can dissipate quicker because of decay due to air turbulence or be transported out of the way on oncoming traffic by cross-wind, yet wake turbulence separation minima do not take into account wind conditions. Indeed, for safety reasons, most airports assume a worst-case scenario and use conservative separations; the interval between aircraft taking off or landing therefore often amounts to several minutes. However, with the aid of accurate wind data and precise measurements of wake vortex by radar sensors, more efficient intervals can be set, particularly when weather conditions are stable. Depending on traffic volume, these adjustments can generate capacity gains, which have major commercial benefits. This paper presents the use of Electronic scanning radar for detecting wake vortices. In this method, the raindrops Doppler spectrogram is used to retrieve the strength of the wake vortex. Numerical simulation are performed to establish an empirical model used during the retrieval method. This paper presents also the results obtained during the trials of the PARIS-CDG data set recorded from October 2014 to November 2015 with an X-band RADAR developed and deployed by THALES.
-
Key words:
- Wake-vortex hazard /
- Airport capacity /
- Airport safety /
- X-band radar /
- Wake-vortex circulation /
- Eddy dissipation rate
-
Table 1. Statistics about observed landing aircrafts
Number of recordings
(Any SNR)category M: category H: category S: Number of recordings in presence
of rain (SNRe≥5 dB)category M: category H: category S: 26924 18411 7380 1131 7936 5403 2193 340  下载: 导出CSV
下载: 导出CSV
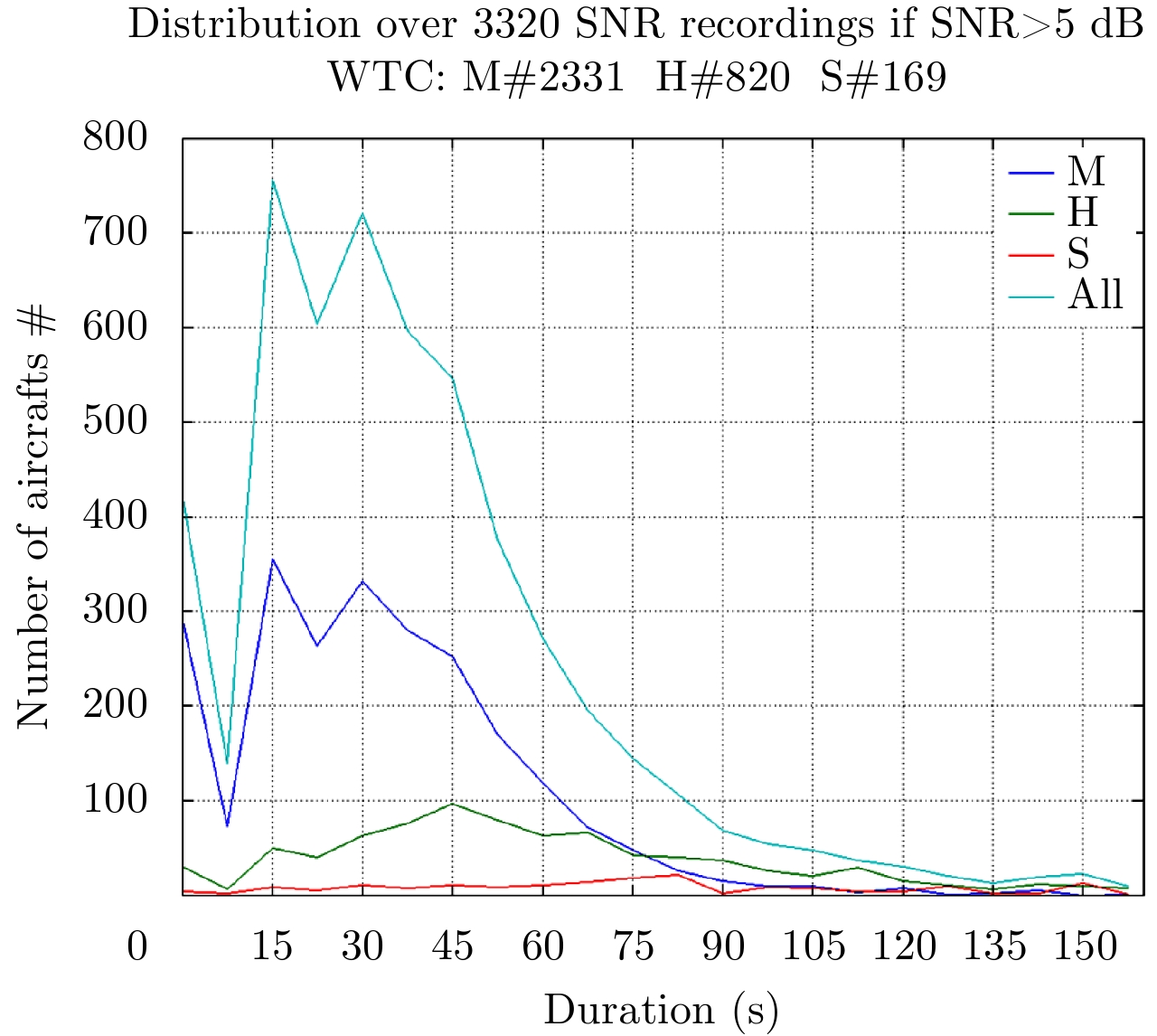
Table 2. Calculation of detection probability 1/2
WTC (Wake
Turbulence Category)SNR > 5 dB SNR > 10 dB detected/total detected/total Cat. M 1734/2332 (74.4%) 1362/1803 (75.5%) Cat. H 740/820 (90.2%) 573/632 (90.7%) Cat. S 154/169 (91.1%) 103/113 (91.2%)
下载: 导出CSV
Table 3. Calculation of detection probability 2/2
WTC SNR > 15 dB SNR > 20 dB detected/total detected/total Cat. M 1001/1282 (78.1%) 472/632 (74.7%) Cat. H 394/436 (90.4%) 211/226 (93.4%) Cat. S 64/70 (91.4%) 27/30 (90.0%)
下载: 导出CSV
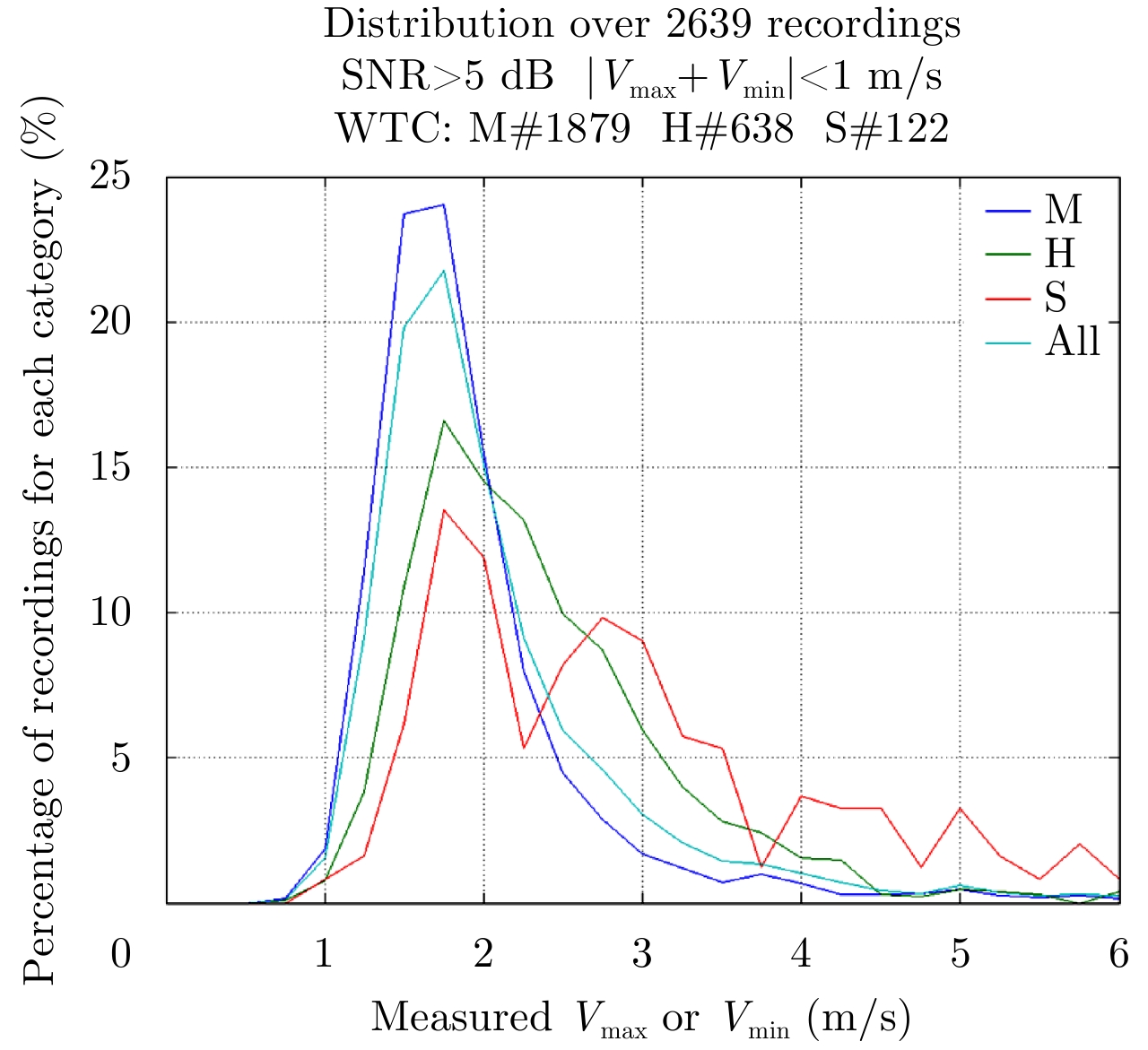
Table 4. Statistical results
Category Npoints $\nu $avg (m/s) $\sigma $avg (m/s) $\nu $mode (m/s) All 2639 2,10 0,89 1,75 M 1879 1,94 0,79 1,75 H 638 2,49 0,95 1,75 S 2639 2,10 0,89 1,75
下载: 导出CSV
-
[1] 12.2.2, Preliminary System Requirements of Runway Wake Vortex Detection, Prediction and decision support tools, D1,00.01.00, 11/07/2010. [2] 12.2.2, Preliminary System Architecture of Runway Wake Vortex Detection, Prediction and Decision Support Tools, D2,00.01.00, 27/10/2010. [3] 12.2.2, Recommendations on sensor technologies, D4,00.01.01, 14/10/2011. [4] Shariff K and Wray A. Analysis of the Radar reflectivity of aircraft vortex wakes[J]. Journal of Fluid Mechanics, 2002, 463(1): 121–161. [5] Liu Z X. Modélisation des signatures radar des tourbillons de sillage par temps de pluie[D]. [Ph.D. dissertation], 2013. [6] Li J L, Wang X S, Wang T, et al. Circulation retrieval of wake vortex under rainy condition with a vertically pointing radar[J]. IEEE Transactions on Aerospace and Electronic Systems, 2017, 53(4): 1893–1906. DOI: 10.1109/TAES.2017.2675198 [7] Barbaresco F, Brion V, and Jeannin N. Radar wake-vortices cross-section/Doppler signature characterisation based on simulation and field tests trials[J]. IET Radar,Sonar&Navigation, 2016, 10(1): 82–96. [8] Oude Nijhuis A C P, Thobois L P, Barbaresco F, et al.. Wind hazard and turbulence monitoring at airports with lidar and radar sensors and Mode-S downlinks: The UFO Project[J]. Bulletin of the American Meteorological Society. (in press) [9] Kovalev D, Vanhoenacker-Janvier D, Wilson R, et al.. Electromagnetic wind radar simulator validation using meteorological data and a zenith X-band radar[C]. 2016 European Radar Conference (EuRAD 2016), London, 2016. [10] Barbaresco F, Thobois L, Dolfi-Bouteyre A, et al.. Monitoring wind, turbulence and aircraft wake vortices by high resolution RADAR and LIDAR remote sensors in all weather conditions[Z]. Journées scientifiques URSI, 2015. [11] Barbaresco F, Jeantet A, and Meier U. Wake vortex detection & monitoring by X-band doppler radar: Paris orly radar campaign results[C]. Proceedings of IET International Conference on Radar Systems, Edinburgh, UK, 2007. [12] Barbaresco F, Wasselin J P, Jeantet A, et al.. Wake vortex monitoring & profiling by Doppler X-band radar in all weather conditions[C]. Eurocontrol Innovative Research Workshop, Bretigny, 2007. [13] Barbaresco F, Wasselin J P, Jeantet A, et al.. Wake vortex profiling by Doppler X-band radar: Orly trials at initial take-off & ILS interception critical areas[C]. Proceedings of IEEE Radar Conference, Rome, 2008. [14] Barbaresco F, Jeantet A, and Meier U. Wake vortex X-band radar monitoring: Paris-CDG airport 2008 campaign results & prospectives[C]. Proceedings of International Radar Conference-Surveillance for a Safer World, Bordeaux, France, 2009. [15] Barbaresco F and Meier U. Radar monitoring of a wake vortex: Electromagnetic reflection of wake turbulence in clear air[J]. Comptes Rendus Physique, 2010, 11(1): 54–67. DOI: 10.1016/j.crhy.2010.01.001 [16] Barbaresco F. Airport radar monitoring of wake vortex in all weather conditions[C]. Proceedings of 2010 European Radar Conference (EuRAD), Paris, 2010: 85–88. [17] Barbaresco F, Juge P, Klein M, et al.. Optimising runway throughput through wake vortex detection, prediction and decision support tools[C]. Proceedings of 2011 Tyrrhenian International Workshop on Digital Communications-Enhanced Surveillance of Aircraft and Vehicles (TIWDC/ESAV), Capri, Italy, 2011. [18] Barbaresco F, Juge P, Klein M, et al.. Wake vortex detection, prediction and decision support tools[C]. Proceedings of the 2013 IEEE/AIAA 32nd Digital Avionics Systems Conference (DASC), East Syracuse, NY, 2013: 6B1-1–6B1-15. [19] Barbaresco F, Juge P, Klein M, et al.. Boom of airport capacity based on wake vortex hasards mitigation sensors and systems[C]. AUN2014: Airports in Urban Networks, Paris, 2014. [20] Barbaresco F, Juge P, Bruchec P, et al.. Eddy Dissipation Rate (EDR) retrieval with ultra-fast high range resolution electronic-scanning X-band airport radar: Results of European FP7 UFO toulouse airport trials[C]. Proceedings of 2015 European Radar Conference (EuRAD), Paris, 2015. [21] Speiker L J P, Barbaresco F, Frech M, et al. ATC-Wake: Integrated wake vortex safety & capacity system[J]. Journal of Air Traffic Control, 2007, 49(1): 17–32. [22] Winckelmans G, Desenfans O, Barbaresco F, et al.. The ATC-Wake Predictor system and its potential use to increase the capacity at airports[C]. International Symposium on Sensors and Systems for Airport Surveillance, Paris, France, 2005. [23] Barbaresco F. Compréhension et maîtrise des tourbillons de sillage: Cinq siècles d’aventures de Léonard de Vinci à Jean Leray[Z]. Revue REE, 2013(3): 84–88. [24] Barbaresco F. Airport radar monitoring of wake vortex in all weather conditions[C]. Proceedings of 2010 European Radar Conference (EuRAD), Paris, 2010. [25] Vanhoenacker-Janvier D, Djafri K, della Faille de Leverghem R, et al.. Simulation of the radar cross-section of wake vortices in clear air[C]. Proceedings of the Seventh European Conference on Radar in Meteorology and Hydrology, Toulouse, 2012. [26] Barbaresco F, Juge P, Klein M, et al.. Wake vortex detection, prediction and decision support tools in SESAR program[C]. Proceedings of the 32th Digital Avionics Systems Conference (DASC), East Syracuse, NY, 2013. [27] Barbaresco F. Radar monitoring of wake vortex: Electromagnetic reflection of wake turbulence in clear air[Z]. CR Physique Académie des Sciences, Elsevier, 2010. [28] Liu Z, Jeannin N, Vincent F, et al.. Development of a radar simulator for monitoring wake vortices in rainy weather[C]. Proceedings of 2011 IEEE CIE International Conference on Radar (Radar), Chengdu, China, 2011. -










计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

