
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公2017年 6卷 第3期
 上一期
上一期
2017, 6(3): 229-238.
 摘要
摘要 850KB
850KB
摘要:
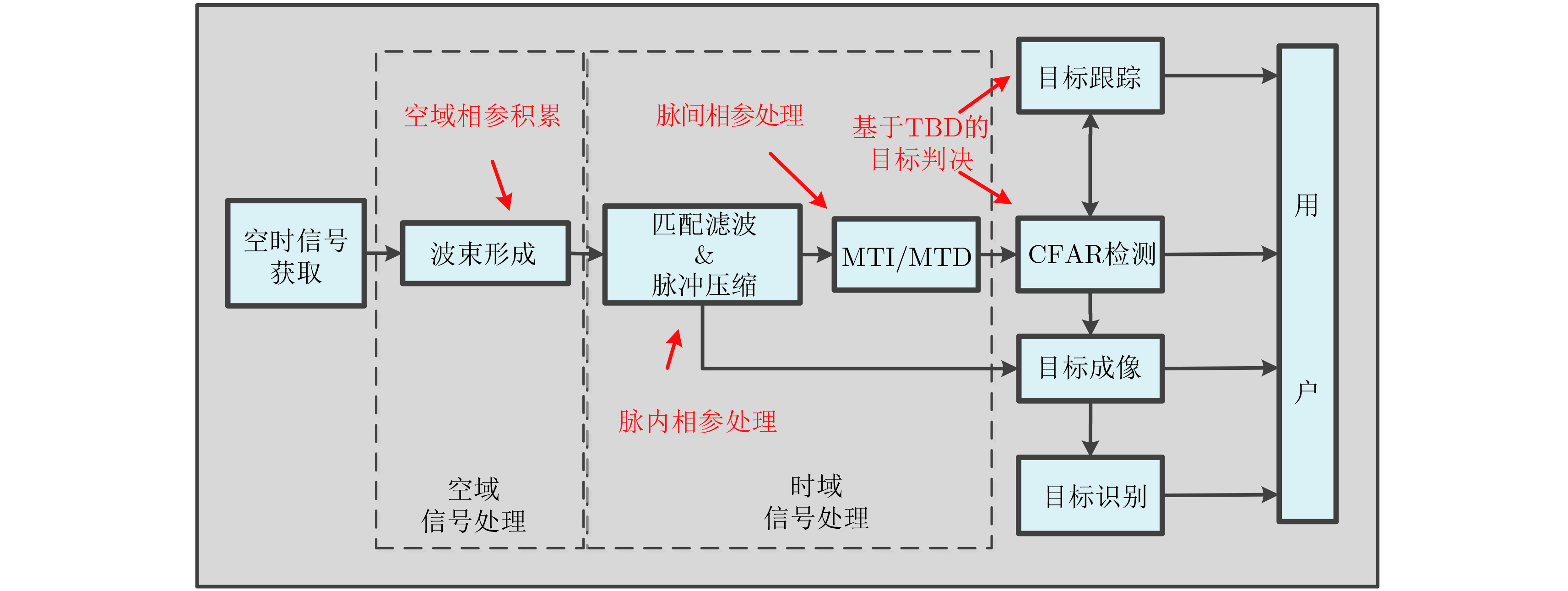
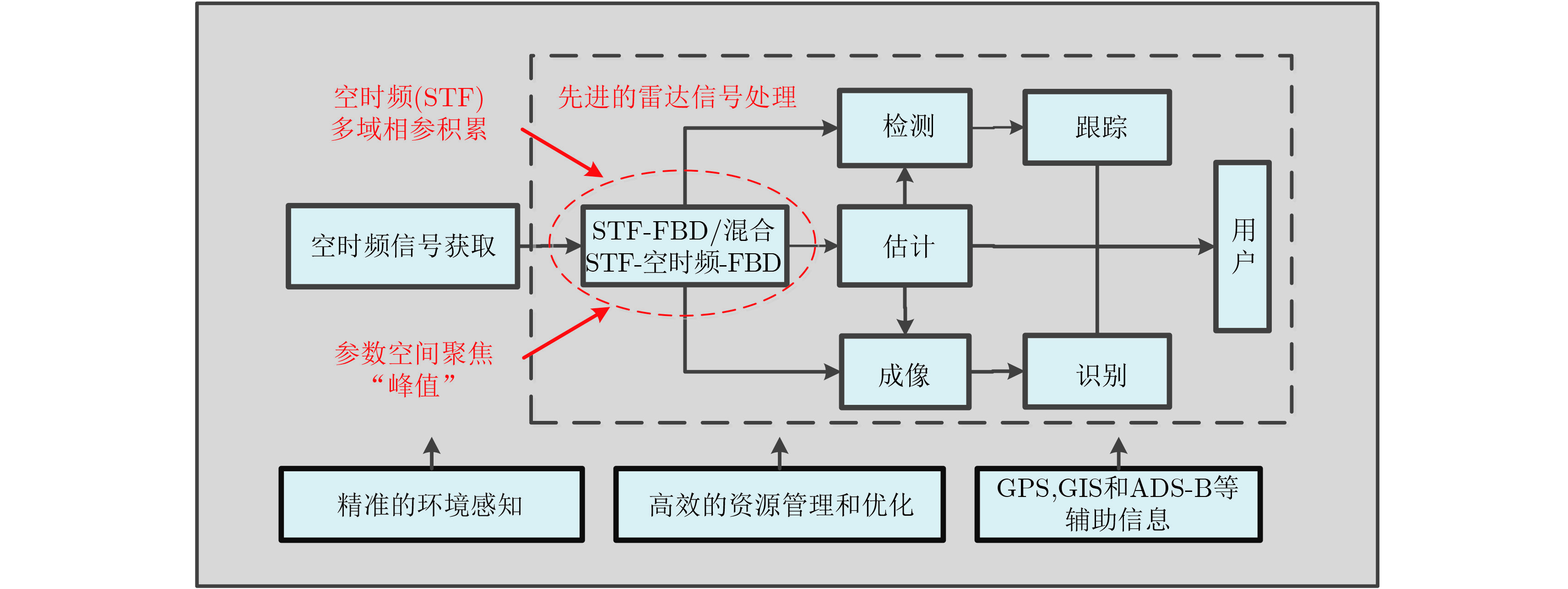
最近涌现的临近空间高动态飞行器存在超高速、高机动、超远程、低RCS、等离子鞘套、电离层污染、宇宙射线干扰等显著区别于常规目标的特性。基于空天地不同平台雷达临近空间高动态飞行器通用信号建模,该文提出了分布式组网、多维度、变模型、多目标、微运动、非参数化等应用的检测前聚焦雷达信号处理新方法,通过多维参数空间相参积累和能量聚焦,克服尺度伸缩、任意运动、孔径渡越、稀疏子带、跨距离、跨多普勒和跨波束等效应,有效抑制电离层污染和有源干扰,显著提高临近空间高动态飞行器的目标检测、参数测量、聚焦成像、机动跟踪、特征提取和属性识别等环节性能。该文方法适用于临近空间高动态目标也适用于探测常规雷达目标,适用于新体制雷达也适用于常规体制雷达,具备重要的学术理论价值和广阔的应用前景。 最近涌现的临近空间高动态飞行器存在超高速、高机动、超远程、低RCS、等离子鞘套、电离层污染、宇宙射线干扰等显著区别于常规目标的特性。基于空天地不同平台雷达临近空间高动态飞行器通用信号建模,该文提出了分布式组网、多维度、变模型、多目标、微运动、非参数化等应用的检测前聚焦雷达信号处理新方法,通过多维参数空间相参积累和能量聚焦,克服尺度伸缩、任意运动、孔径渡越、稀疏子带、跨距离、跨多普勒和跨波束等效应,有效抑制电离层污染和有源干扰,显著提高临近空间高动态飞行器的目标检测、参数测量、聚焦成像、机动跟踪、特征提取和属性识别等环节性能。该文方法适用于临近空间高动态目标也适用于探测常规雷达目标,适用于新体制雷达也适用于常规体制雷达,具备重要的学术理论价值和广阔的应用前景。
最近涌现的临近空间高动态飞行器存在超高速、高机动、超远程、低RCS、等离子鞘套、电离层污染、宇宙射线干扰等显著区别于常规目标的特性。基于空天地不同平台雷达临近空间高动态飞行器通用信号建模,该文提出了分布式组网、多维度、变模型、多目标、微运动、非参数化等应用的检测前聚焦雷达信号处理新方法,通过多维参数空间相参积累和能量聚焦,克服尺度伸缩、任意运动、孔径渡越、稀疏子带、跨距离、跨多普勒和跨波束等效应,有效抑制电离层污染和有源干扰,显著提高临近空间高动态飞行器的目标检测、参数测量、聚焦成像、机动跟踪、特征提取和属性识别等环节性能。该文方法适用于临近空间高动态目标也适用于探测常规雷达目标,适用于新体制雷达也适用于常规体制雷达,具备重要的学术理论价值和广阔的应用前景。 最近涌现的临近空间高动态飞行器存在超高速、高机动、超远程、低RCS、等离子鞘套、电离层污染、宇宙射线干扰等显著区别于常规目标的特性。基于空天地不同平台雷达临近空间高动态飞行器通用信号建模,该文提出了分布式组网、多维度、变模型、多目标、微运动、非参数化等应用的检测前聚焦雷达信号处理新方法,通过多维参数空间相参积累和能量聚焦,克服尺度伸缩、任意运动、孔径渡越、稀疏子带、跨距离、跨多普勒和跨波束等效应,有效抑制电离层污染和有源干扰,显著提高临近空间高动态飞行器的目标检测、参数测量、聚焦成像、机动跟踪、特征提取和属性识别等环节性能。该文方法适用于临近空间高动态目标也适用于探测常规雷达目标,适用于新体制雷达也适用于常规体制雷达,具备重要的学术理论价值和广阔的应用前景。
2017, 6(3): 239-251.
摘要:
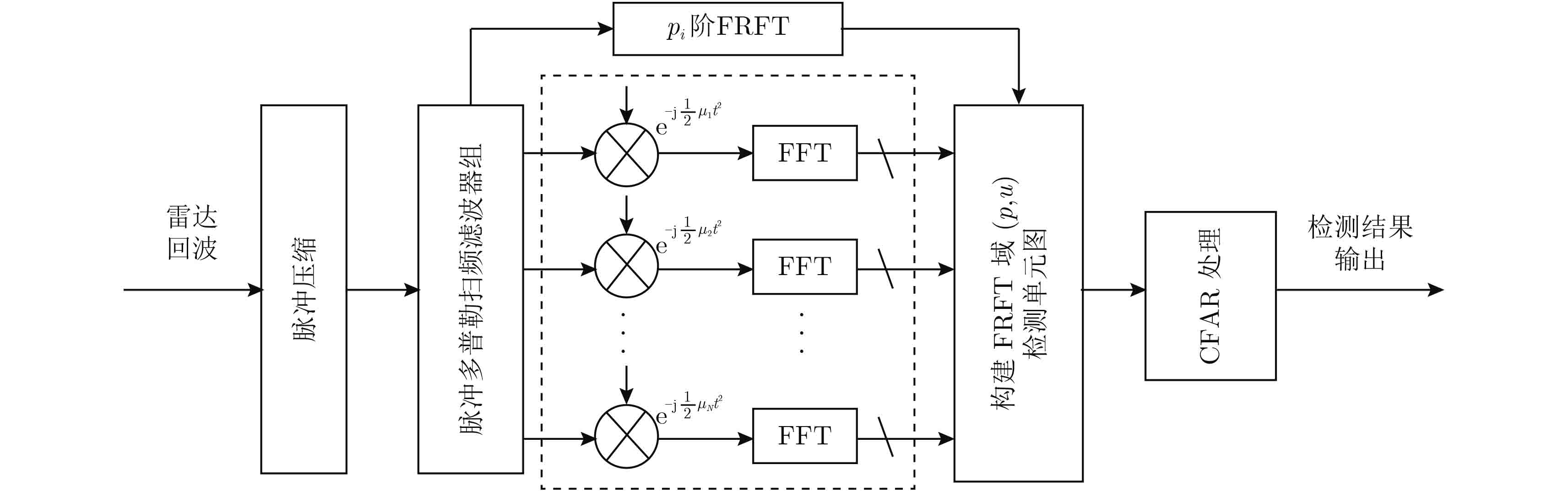
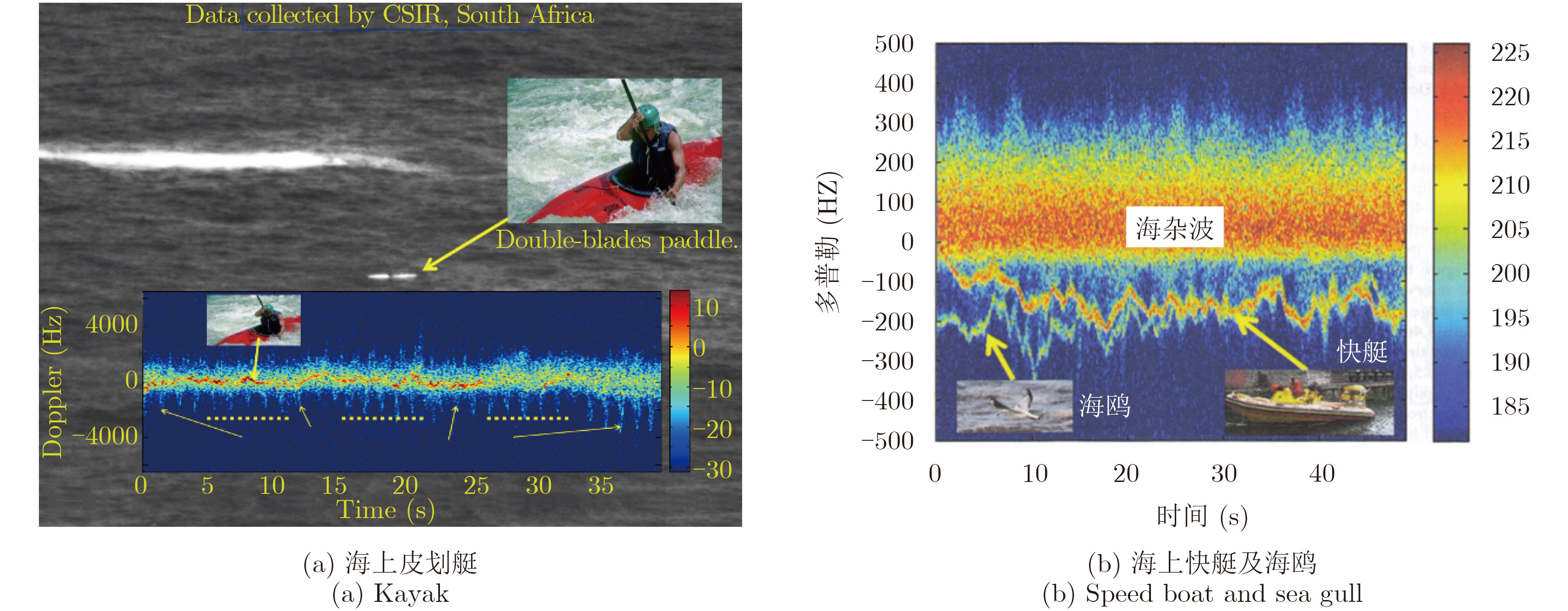
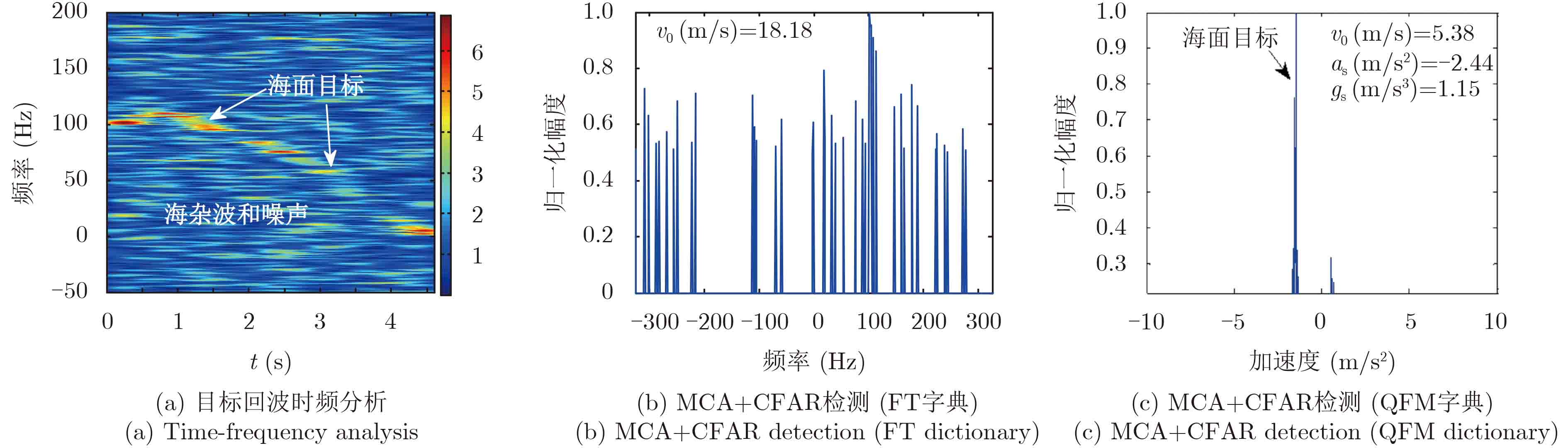
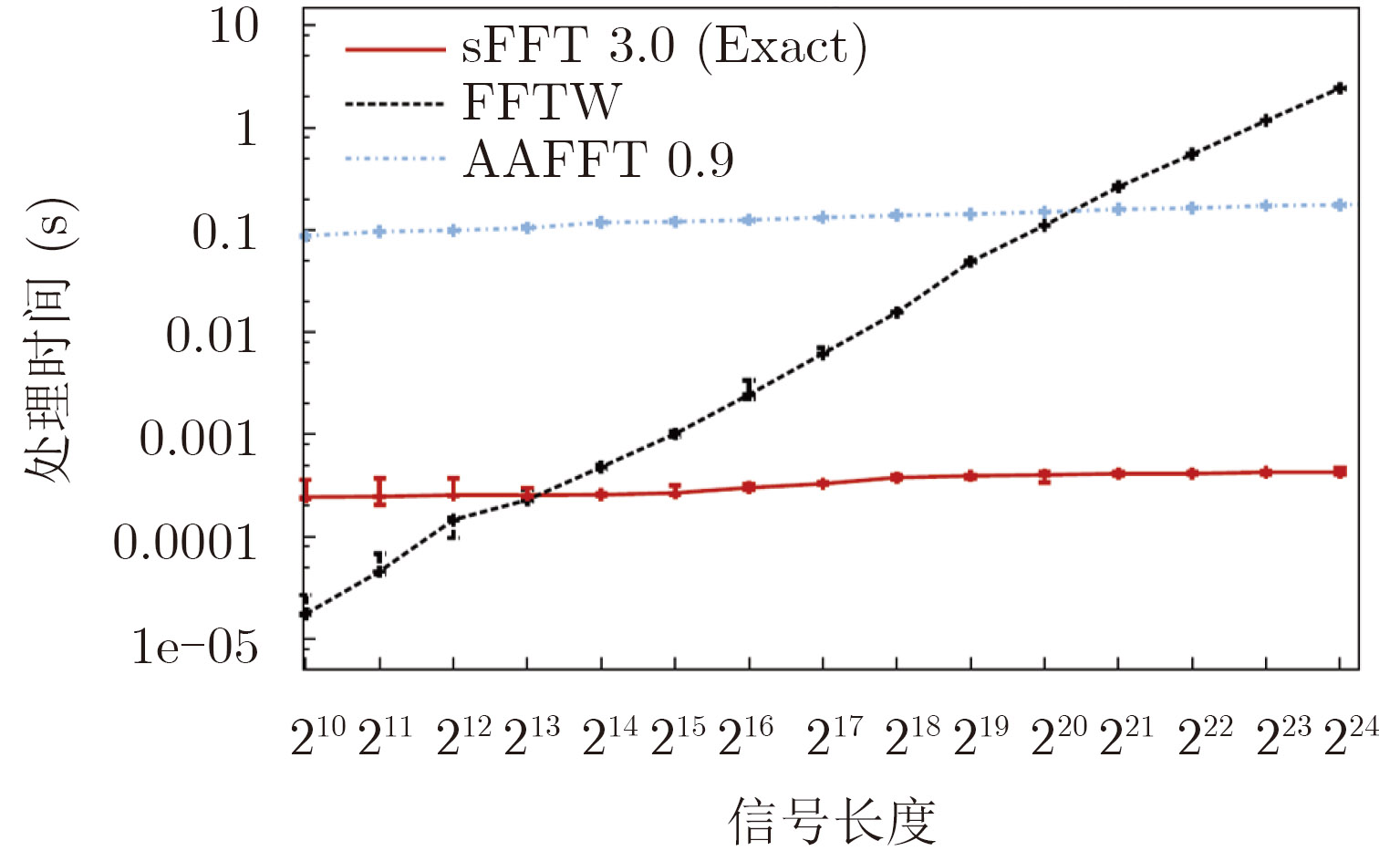
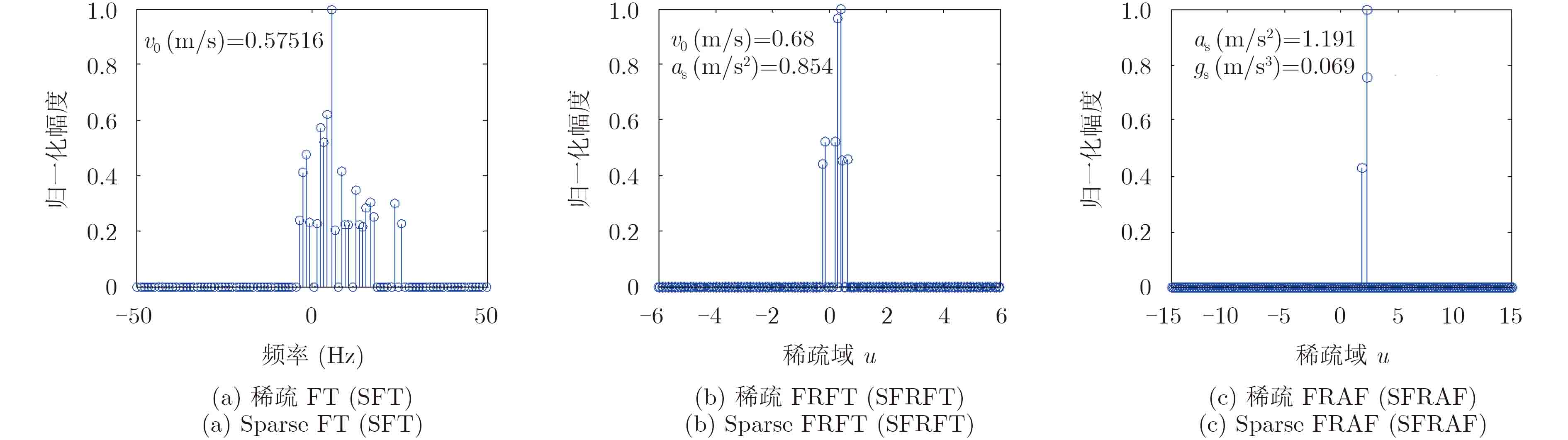
复杂背景下稳健高效的低可观测动目标检测始终是雷达信号处理领域的研究热点和难点,一方面,强杂波背景和目标复杂运动使得信号微弱,时频域难以区分;另一方面,相参积累算法复杂,长时间积累运算量较大,如何利用有限的雷达资源提高雷达探测性能成为亟需解决的问题。高分辨稀疏表示技术从信号稀疏性角度出发区分杂波和动目标,是传统变换域动目标检测技术的拓展,具有高时频分辨率、对噪声不敏感、稳健性高以及适于多分量信号分析的优势,有广阔应用前景。该文重点从应用角度进行归纳总结,系统回顾了雷达动目标检测的常规方法,然后对稀疏表示在雷达杂波特性分析、抑制、动目标检测、特征提取、时频分析等方面的应用进行了初步总结和归纳,对研究方向进行展望,最后结合实测数据和已有成果给出了部分处理结果。 复杂背景下稳健高效的低可观测动目标检测始终是雷达信号处理领域的研究热点和难点,一方面,强杂波背景和目标复杂运动使得信号微弱,时频域难以区分;另一方面,相参积累算法复杂,长时间积累运算量较大,如何利用有限的雷达资源提高雷达探测性能成为亟需解决的问题。高分辨稀疏表示技术从信号稀疏性角度出发区分杂波和动目标,是传统变换域动目标检测技术的拓展,具有高时频分辨率、对噪声不敏感、稳健性高以及适于多分量信号分析的优势,有广阔应用前景。该文重点从应用角度进行归纳总结,系统回顾了雷达动目标检测的常规方法,然后对稀疏表示在雷达杂波特性分析、抑制、动目标检测、特征提取、时频分析等方面的应用进行了初步总结和归纳,对研究方向进行展望,最后结合实测数据和已有成果给出了部分处理结果。
复杂背景下稳健高效的低可观测动目标检测始终是雷达信号处理领域的研究热点和难点,一方面,强杂波背景和目标复杂运动使得信号微弱,时频域难以区分;另一方面,相参积累算法复杂,长时间积累运算量较大,如何利用有限的雷达资源提高雷达探测性能成为亟需解决的问题。高分辨稀疏表示技术从信号稀疏性角度出发区分杂波和动目标,是传统变换域动目标检测技术的拓展,具有高时频分辨率、对噪声不敏感、稳健性高以及适于多分量信号分析的优势,有广阔应用前景。该文重点从应用角度进行归纳总结,系统回顾了雷达动目标检测的常规方法,然后对稀疏表示在雷达杂波特性分析、抑制、动目标检测、特征提取、时频分析等方面的应用进行了初步总结和归纳,对研究方向进行展望,最后结合实测数据和已有成果给出了部分处理结果。 复杂背景下稳健高效的低可观测动目标检测始终是雷达信号处理领域的研究热点和难点,一方面,强杂波背景和目标复杂运动使得信号微弱,时频域难以区分;另一方面,相参积累算法复杂,长时间积累运算量较大,如何利用有限的雷达资源提高雷达探测性能成为亟需解决的问题。高分辨稀疏表示技术从信号稀疏性角度出发区分杂波和动目标,是传统变换域动目标检测技术的拓展,具有高时频分辨率、对噪声不敏感、稳健性高以及适于多分量信号分析的优势,有广阔应用前景。该文重点从应用角度进行归纳总结,系统回顾了雷达动目标检测的常规方法,然后对稀疏表示在雷达杂波特性分析、抑制、动目标检测、特征提取、时频分析等方面的应用进行了初步总结和归纳,对研究方向进行展望,最后结合实测数据和已有成果给出了部分处理结果。




2017, 6(3): 252-258.
摘要:
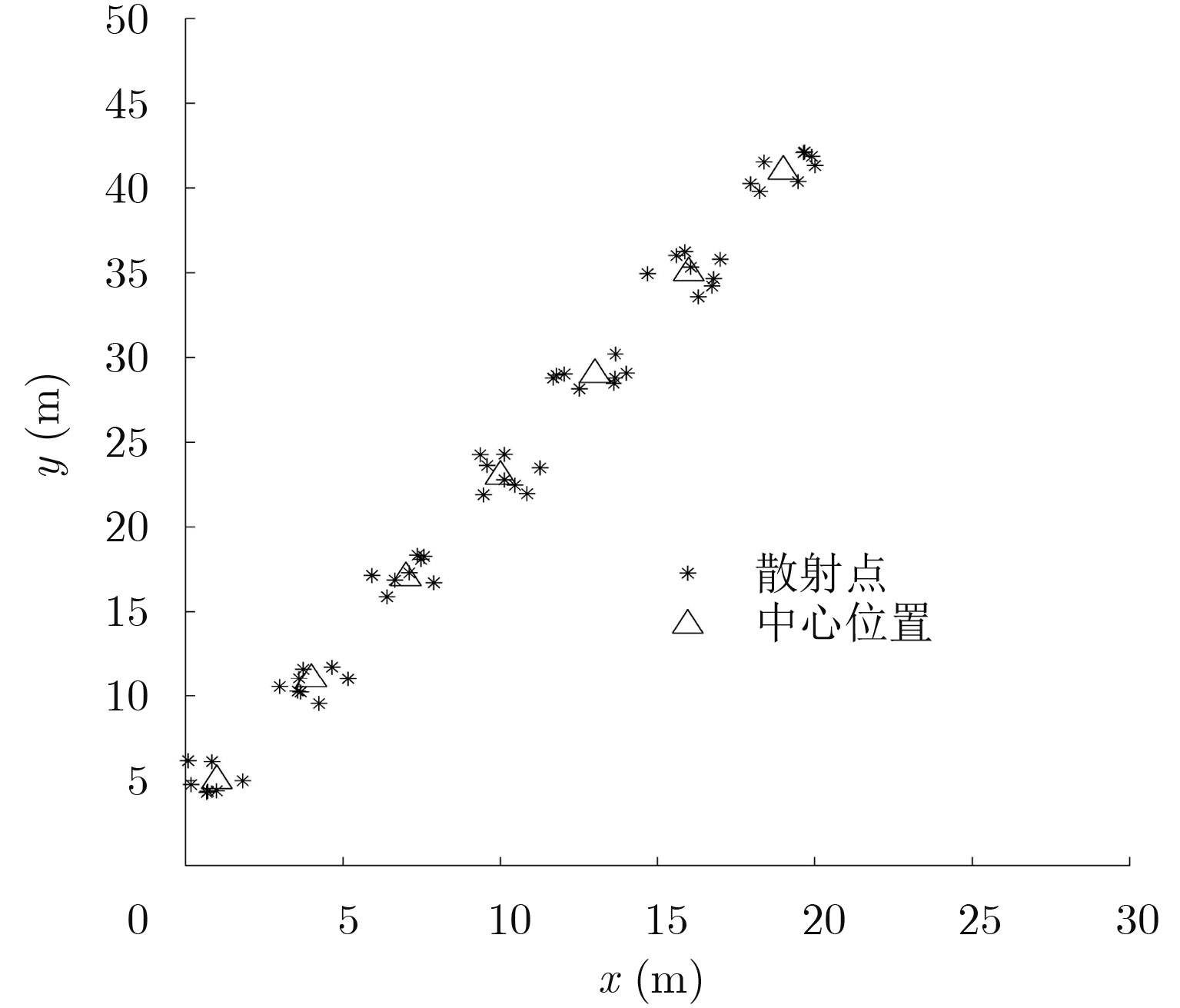
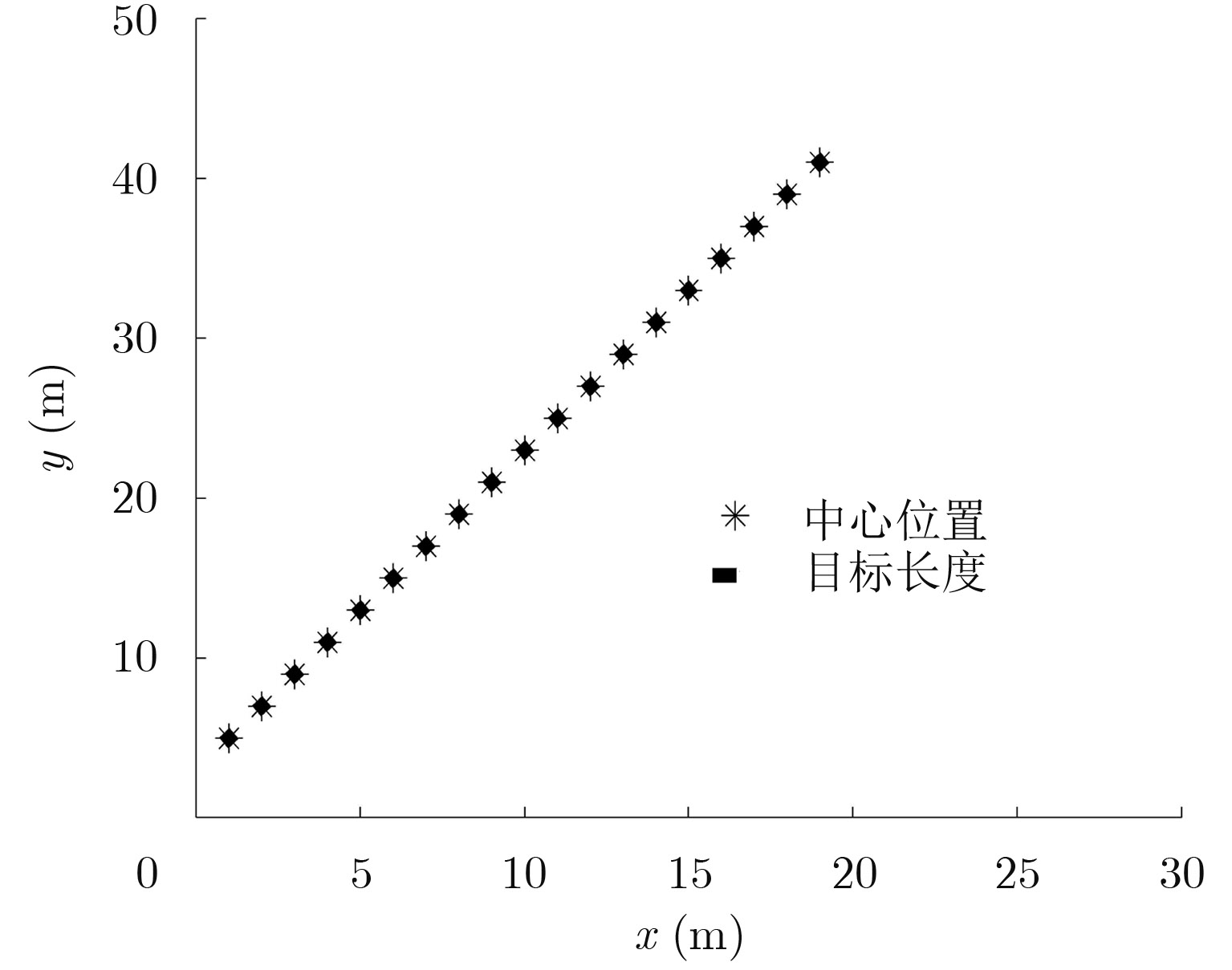
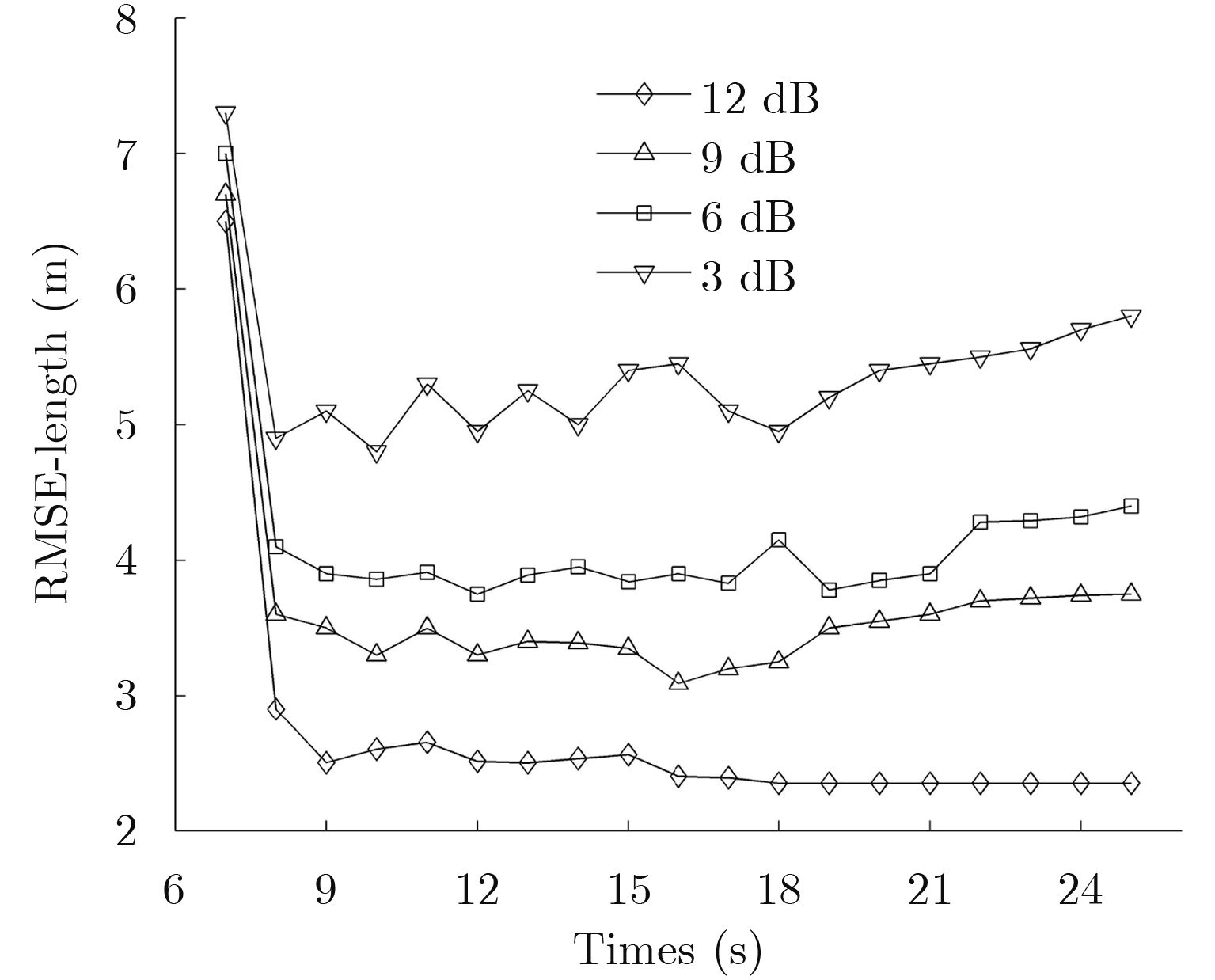
针对杂波环境下微弱扩展目标的实时检测和跟踪问题,该文提出一种基于粒子滤波的检测前跟踪(TBD)算法。该算法以杆状物体作为研究对象,通过划分距离和方位上的单元格,提出了不同区域内含有Weibull杂波的量测模型。在TBD框架下,将二进制目标存在变量和目标形状参数加入到状态向量中,通过抽样得到散射点集合,并利用粒子滤波实现杂波环境下对扩展目标状态和形状参数的检测和估计。仿真实验表明,该算法具有较好的稳定性。 针对杂波环境下微弱扩展目标的实时检测和跟踪问题,该文提出一种基于粒子滤波的检测前跟踪(TBD)算法。该算法以杆状物体作为研究对象,通过划分距离和方位上的单元格,提出了不同区域内含有Weibull杂波的量测模型。在TBD框架下,将二进制目标存在变量和目标形状参数加入到状态向量中,通过抽样得到散射点集合,并利用粒子滤波实现杂波环境下对扩展目标状态和形状参数的检测和估计。仿真实验表明,该算法具有较好的稳定性。
针对杂波环境下微弱扩展目标的实时检测和跟踪问题,该文提出一种基于粒子滤波的检测前跟踪(TBD)算法。该算法以杆状物体作为研究对象,通过划分距离和方位上的单元格,提出了不同区域内含有Weibull杂波的量测模型。在TBD框架下,将二进制目标存在变量和目标形状参数加入到状态向量中,通过抽样得到散射点集合,并利用粒子滤波实现杂波环境下对扩展目标状态和形状参数的检测和估计。仿真实验表明,该算法具有较好的稳定性。 针对杂波环境下微弱扩展目标的实时检测和跟踪问题,该文提出一种基于粒子滤波的检测前跟踪(TBD)算法。该算法以杆状物体作为研究对象,通过划分距离和方位上的单元格,提出了不同区域内含有Weibull杂波的量测模型。在TBD框架下,将二进制目标存在变量和目标形状参数加入到状态向量中,通过抽样得到散射点集合,并利用粒子滤波实现杂波环境下对扩展目标状态和形状参数的检测和估计。仿真实验表明,该算法具有较好的稳定性。


2017, 6(3): 259-266.
摘要:
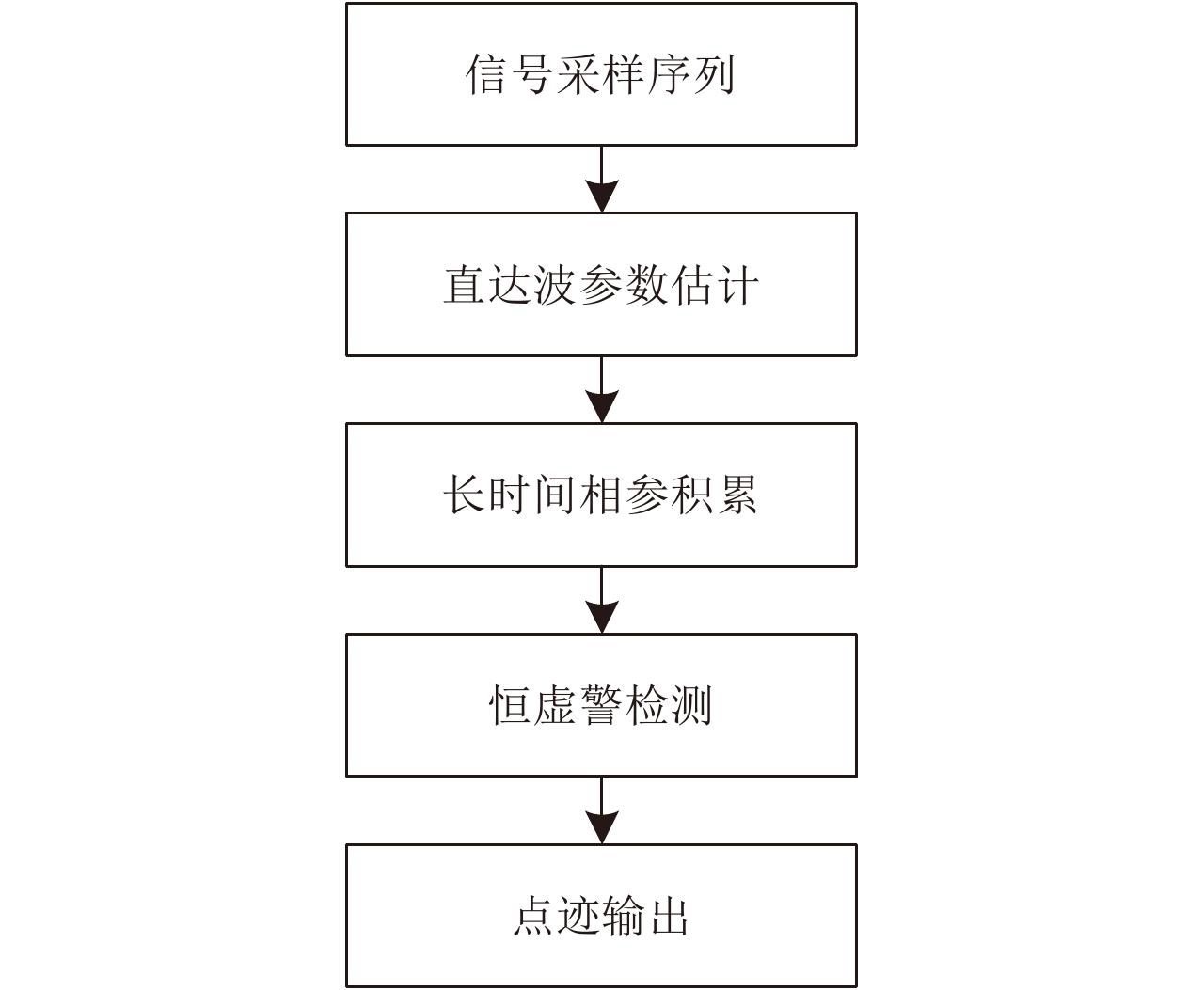
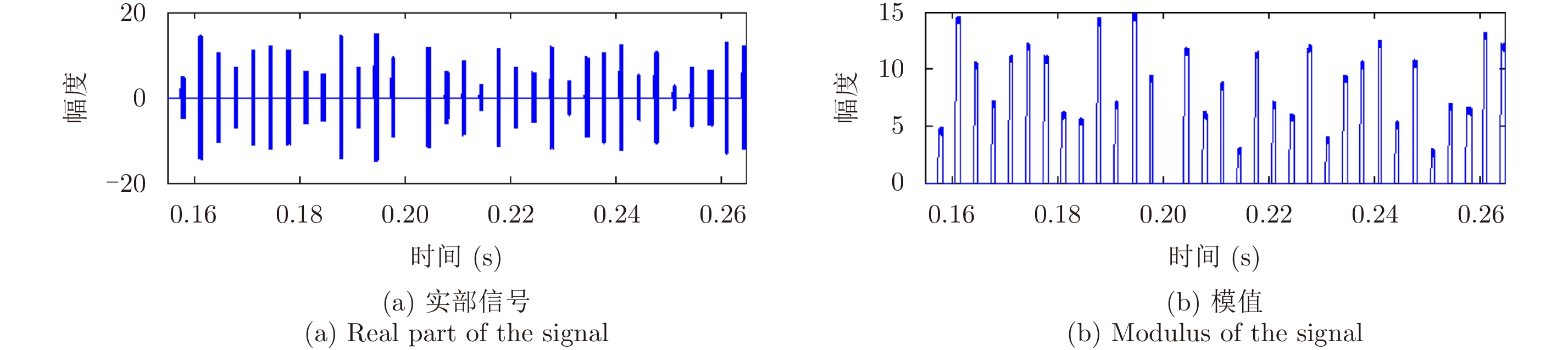
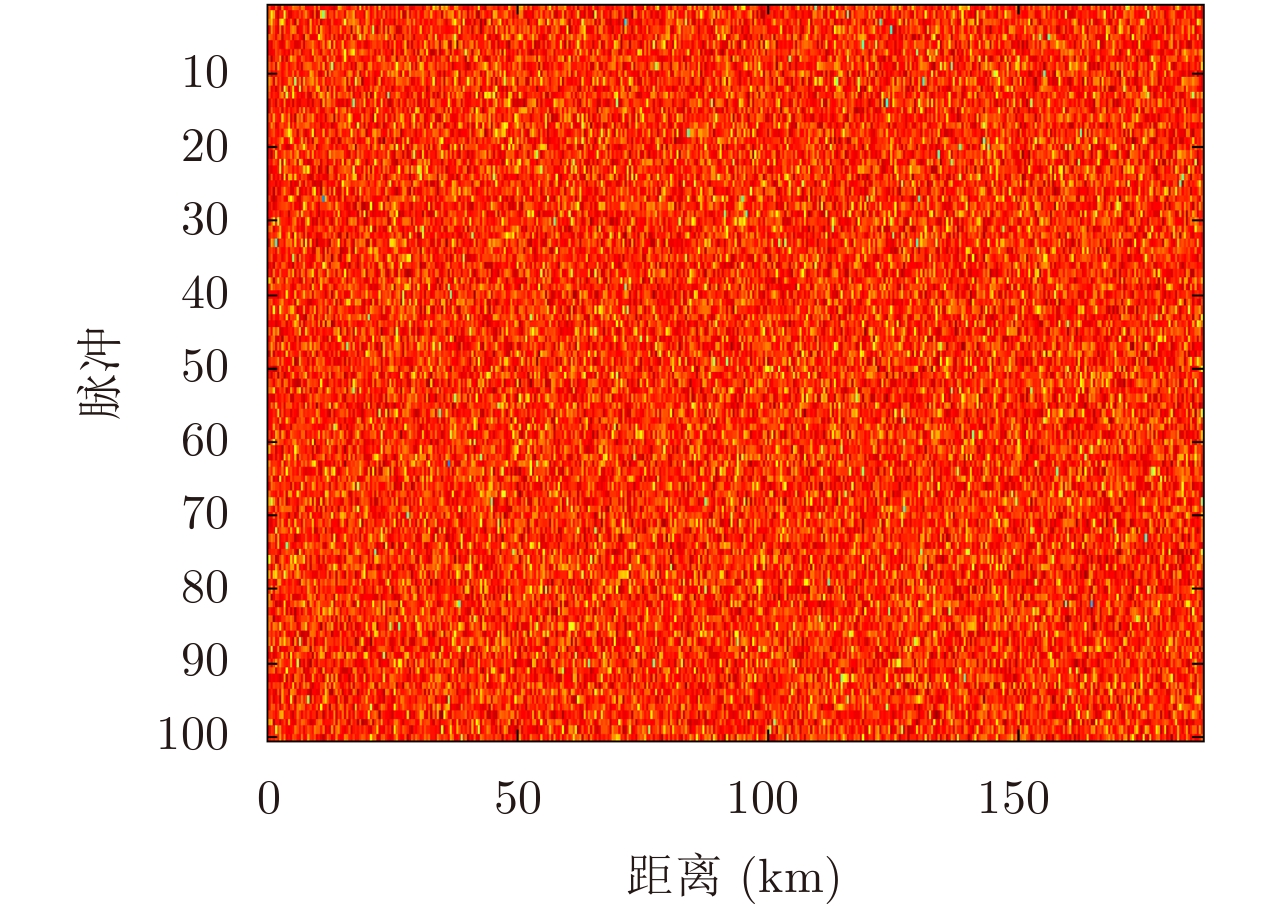
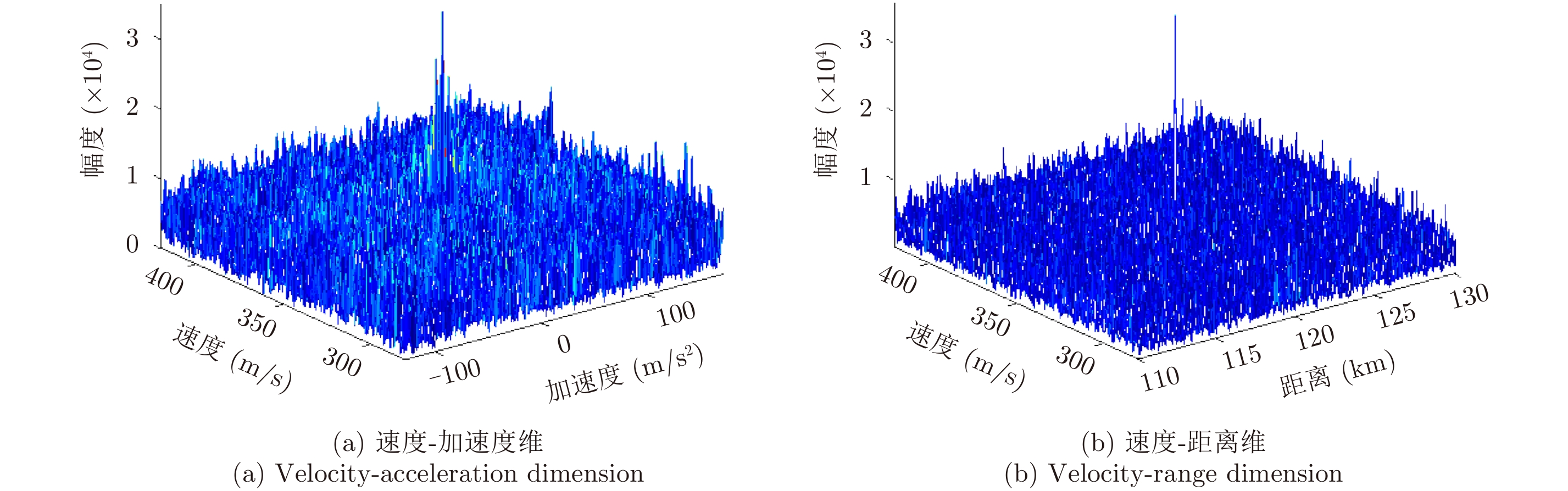
与常规体制雷达相比,空间、时间以及相位同步问题使得非合作双基地雷达(NPBR)中微弱目标探测难度更大。为此,该文给出了一种基于直达波波形参数估计的时间和相位同步方法以及基于捷变波形长时间相参积累的弱目标探测方法。首先,提出了一种基于差分索引的通用脉冲提取方法。其次,给出了脉冲宽度、脉冲重复间隔、带宽、载频以及波达时间等直达波脉冲参数的估计方法,实现了NPBR的时间和相位同步。然后,在波形参数估计的基础上,给出了一种基于捷变波形广义Radon-Fourier变换的弱目标探测算法。最后,仿真和实测数据实验验证了该文算法的有效性。 与常规体制雷达相比,空间、时间以及相位同步问题使得非合作双基地雷达(NPBR)中微弱目标探测难度更大。为此,该文给出了一种基于直达波波形参数估计的时间和相位同步方法以及基于捷变波形长时间相参积累的弱目标探测方法。首先,提出了一种基于差分索引的通用脉冲提取方法。其次,给出了脉冲宽度、脉冲重复间隔、带宽、载频以及波达时间等直达波脉冲参数的估计方法,实现了NPBR的时间和相位同步。然后,在波形参数估计的基础上,给出了一种基于捷变波形广义Radon-Fourier变换的弱目标探测算法。最后,仿真和实测数据实验验证了该文算法的有效性。
与常规体制雷达相比,空间、时间以及相位同步问题使得非合作双基地雷达(NPBR)中微弱目标探测难度更大。为此,该文给出了一种基于直达波波形参数估计的时间和相位同步方法以及基于捷变波形长时间相参积累的弱目标探测方法。首先,提出了一种基于差分索引的通用脉冲提取方法。其次,给出了脉冲宽度、脉冲重复间隔、带宽、载频以及波达时间等直达波脉冲参数的估计方法,实现了NPBR的时间和相位同步。然后,在波形参数估计的基础上,给出了一种基于捷变波形广义Radon-Fourier变换的弱目标探测算法。最后,仿真和实测数据实验验证了该文算法的有效性。 与常规体制雷达相比,空间、时间以及相位同步问题使得非合作双基地雷达(NPBR)中微弱目标探测难度更大。为此,该文给出了一种基于直达波波形参数估计的时间和相位同步方法以及基于捷变波形长时间相参积累的弱目标探测方法。首先,提出了一种基于差分索引的通用脉冲提取方法。其次,给出了脉冲宽度、脉冲重复间隔、带宽、载频以及波达时间等直达波脉冲参数的估计方法,实现了NPBR的时间和相位同步。然后,在波形参数估计的基础上,给出了一种基于捷变波形广义Radon-Fourier变换的弱目标探测算法。最后,仿真和实测数据实验验证了该文算法的有效性。





2017, 6(3): 267-274.
摘要:
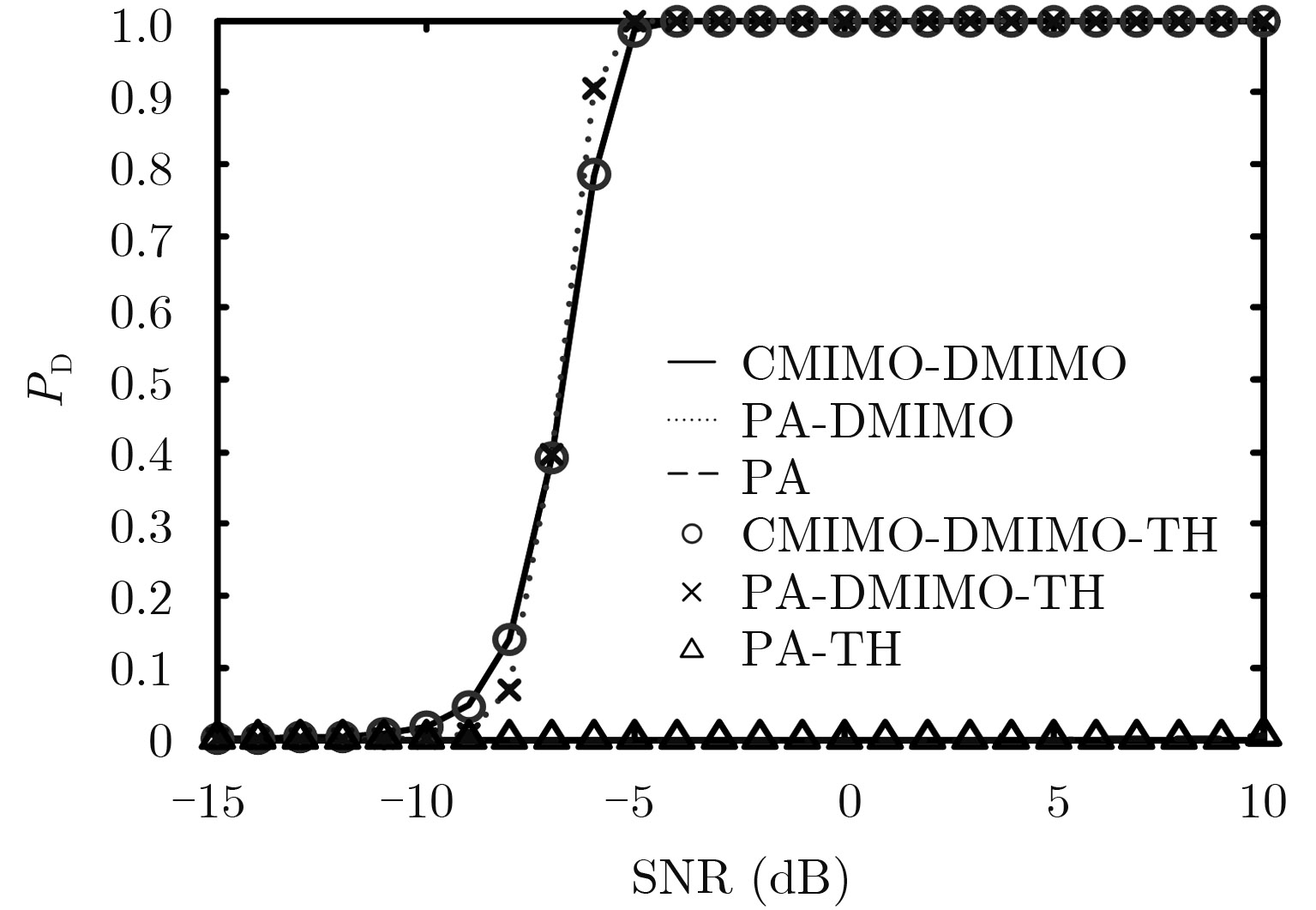
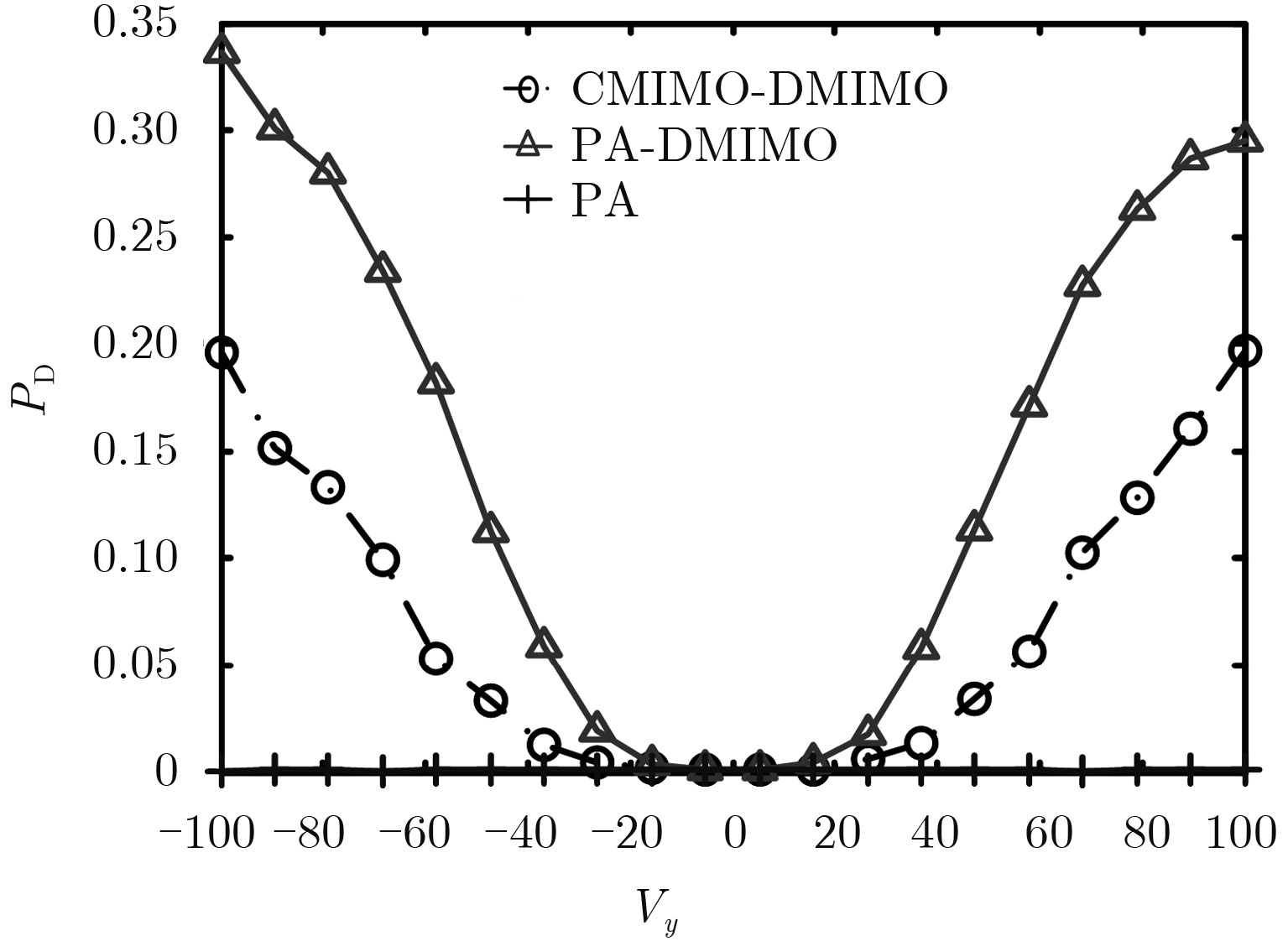
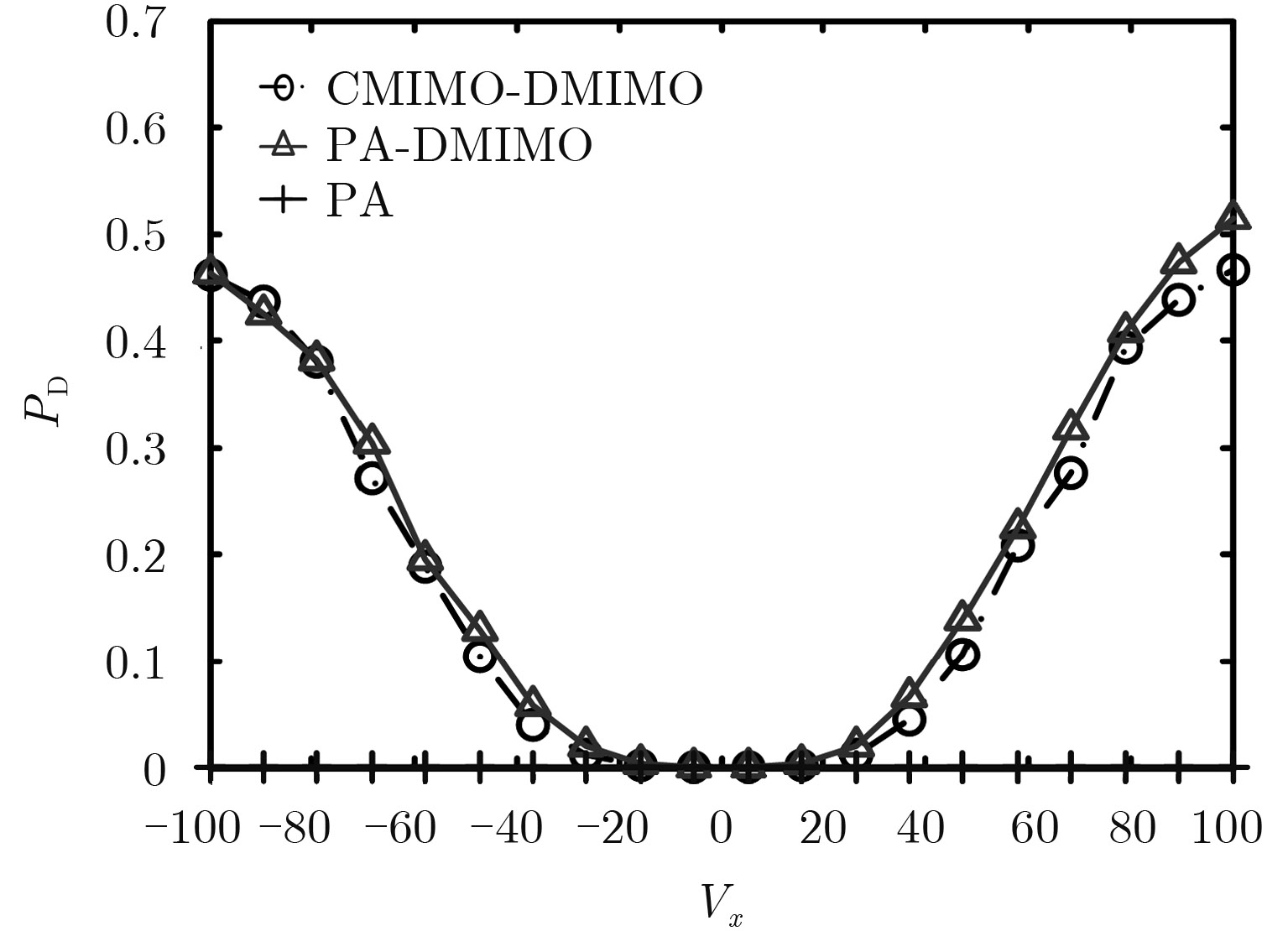
多机协同探测雷达系统利用目标在不同机载雷达间的径向速度差异实现目标的有效检测,该系统已成为当前机载雷达领域的研究热点。该文首先建立了不同发射波形条件下多机协同探测雷达系统的信号模型,并给出了基于广义似然比(Generalized Likelihood Ratio Test, GLRT)准则的自适应检测器及其渐进统计分布特性,最后通过计算机仿真分析了3种特定发射波形下的运动目标检测性能。仿真结果表明多机协同探测雷达系统中发射波形的变化会严重影响雷达系统的运动目标检测性能,且相同发射波形的雷达系统对不同运动速度的目标检测性能也存在区别。 多机协同探测雷达系统利用目标在不同机载雷达间的径向速度差异实现目标的有效检测,该系统已成为当前机载雷达领域的研究热点。该文首先建立了不同发射波形条件下多机协同探测雷达系统的信号模型,并给出了基于广义似然比(Generalized Likelihood Ratio Test, GLRT)准则的自适应检测器及其渐进统计分布特性,最后通过计算机仿真分析了3种特定发射波形下的运动目标检测性能。仿真结果表明多机协同探测雷达系统中发射波形的变化会严重影响雷达系统的运动目标检测性能,且相同发射波形的雷达系统对不同运动速度的目标检测性能也存在区别。
多机协同探测雷达系统利用目标在不同机载雷达间的径向速度差异实现目标的有效检测,该系统已成为当前机载雷达领域的研究热点。该文首先建立了不同发射波形条件下多机协同探测雷达系统的信号模型,并给出了基于广义似然比(Generalized Likelihood Ratio Test, GLRT)准则的自适应检测器及其渐进统计分布特性,最后通过计算机仿真分析了3种特定发射波形下的运动目标检测性能。仿真结果表明多机协同探测雷达系统中发射波形的变化会严重影响雷达系统的运动目标检测性能,且相同发射波形的雷达系统对不同运动速度的目标检测性能也存在区别。 多机协同探测雷达系统利用目标在不同机载雷达间的径向速度差异实现目标的有效检测,该系统已成为当前机载雷达领域的研究热点。该文首先建立了不同发射波形条件下多机协同探测雷达系统的信号模型,并给出了基于广义似然比(Generalized Likelihood Ratio Test, GLRT)准则的自适应检测器及其渐进统计分布特性,最后通过计算机仿真分析了3种特定发射波形下的运动目标检测性能。仿真结果表明多机协同探测雷达系统中发射波形的变化会严重影响雷达系统的运动目标检测性能,且相同发射波形的雷达系统对不同运动速度的目标检测性能也存在区别。





2017, 6(3): 275-284.
摘要:
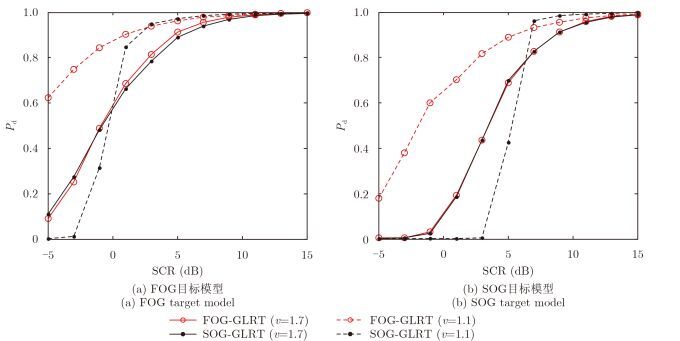
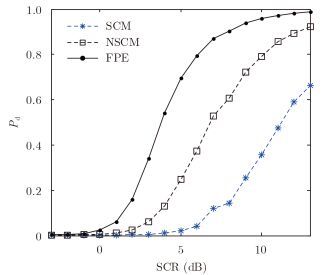
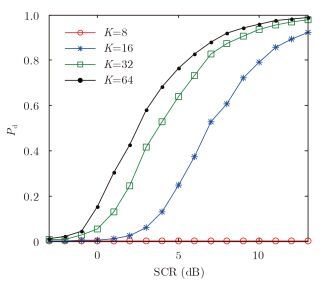
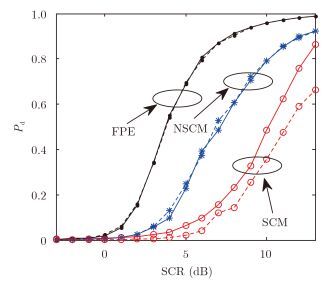
该文在复合高斯海杂波背景下,以逆Gamma分布作为纹理分量的先验分布模型,研究了1阶高斯(First Order Gaussian, FOG)和2阶高斯(Second Order Gaussian, SOG)两类子空间目标的自适应检测问题。采用两步广义似然比(Generalized Likelihood Ratio Test, GLRT)推导了检测统计量,并分别采用采样协方差矩阵(Sample Covariance Matrix, SCM)、归一化采样协方差矩阵(Normalized Sample Covariance Matrix, NSCM)和定点估计(Function Point Estimation, FPE)作为协方差矩阵估计值,与GLRT相结合,构造出新的自适应检测器。由于该文检测器在设计阶段考虑了海杂波的先验分布模型,且在检测阶段采用了与工作环境相匹配的模型参数,经性能分析与验证,其在检测性能上优于已有匹配滤波(Adaptive Matched Filter, AMF)和归一化匹配滤波(Adaptive Normalized Matched Filter, ANMF)检测器。 该文在复合高斯海杂波背景下,以逆Gamma分布作为纹理分量的先验分布模型,研究了1阶高斯(First Order Gaussian, FOG)和2阶高斯(Second Order Gaussian, SOG)两类子空间目标的自适应检测问题。采用两步广义似然比(Generalized Likelihood Ratio Test, GLRT)推导了检测统计量,并分别采用采样协方差矩阵(Sample Covariance Matrix, SCM)、归一化采样协方差矩阵(Normalized Sample Covariance Matrix, NSCM)和定点估计(Function Point Estimation, FPE)作为协方差矩阵估计值,与GLRT相结合,构造出新的自适应检测器。由于该文检测器在设计阶段考虑了海杂波的先验分布模型,且在检测阶段采用了与工作环境相匹配的模型参数,经性能分析与验证,其在检测性能上优于已有匹配滤波(Adaptive Matched Filter, AMF)和归一化匹配滤波(Adaptive Normalized Matched Filter, ANMF)检测器。
该文在复合高斯海杂波背景下,以逆Gamma分布作为纹理分量的先验分布模型,研究了1阶高斯(First Order Gaussian, FOG)和2阶高斯(Second Order Gaussian, SOG)两类子空间目标的自适应检测问题。采用两步广义似然比(Generalized Likelihood Ratio Test, GLRT)推导了检测统计量,并分别采用采样协方差矩阵(Sample Covariance Matrix, SCM)、归一化采样协方差矩阵(Normalized Sample Covariance Matrix, NSCM)和定点估计(Function Point Estimation, FPE)作为协方差矩阵估计值,与GLRT相结合,构造出新的自适应检测器。由于该文检测器在设计阶段考虑了海杂波的先验分布模型,且在检测阶段采用了与工作环境相匹配的模型参数,经性能分析与验证,其在检测性能上优于已有匹配滤波(Adaptive Matched Filter, AMF)和归一化匹配滤波(Adaptive Normalized Matched Filter, ANMF)检测器。 该文在复合高斯海杂波背景下,以逆Gamma分布作为纹理分量的先验分布模型,研究了1阶高斯(First Order Gaussian, FOG)和2阶高斯(Second Order Gaussian, SOG)两类子空间目标的自适应检测问题。采用两步广义似然比(Generalized Likelihood Ratio Test, GLRT)推导了检测统计量,并分别采用采样协方差矩阵(Sample Covariance Matrix, SCM)、归一化采样协方差矩阵(Normalized Sample Covariance Matrix, NSCM)和定点估计(Function Point Estimation, FPE)作为协方差矩阵估计值,与GLRT相结合,构造出新的自适应检测器。由于该文检测器在设计阶段考虑了海杂波的先验分布模型,且在检测阶段采用了与工作环境相匹配的模型参数,经性能分析与验证,其在检测性能上优于已有匹配滤波(Adaptive Matched Filter, AMF)和归一化匹配滤波(Adaptive Normalized Matched Filter, ANMF)检测器。



2017, 6(3): 285-291.
摘要:
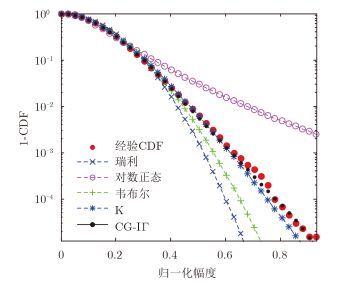
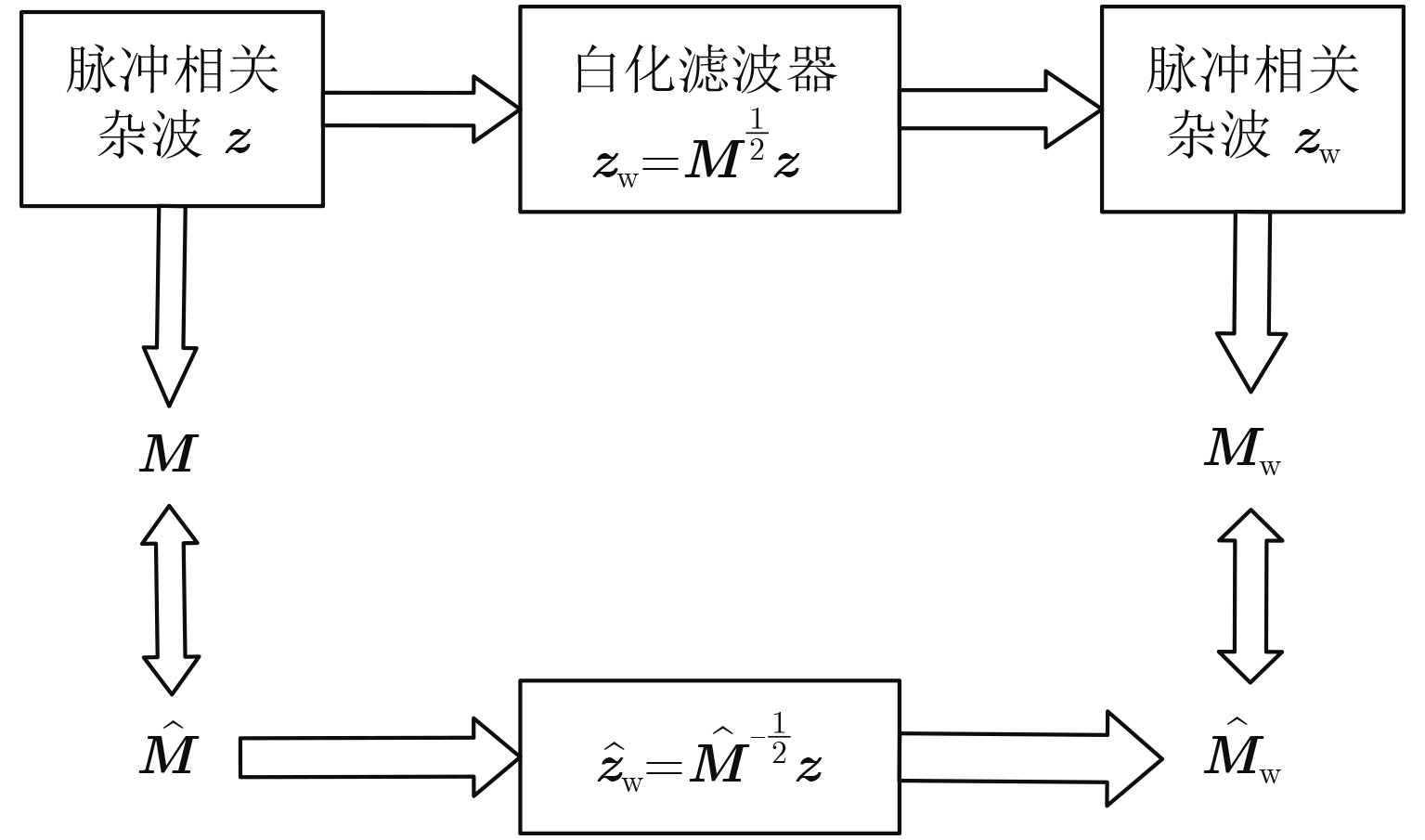
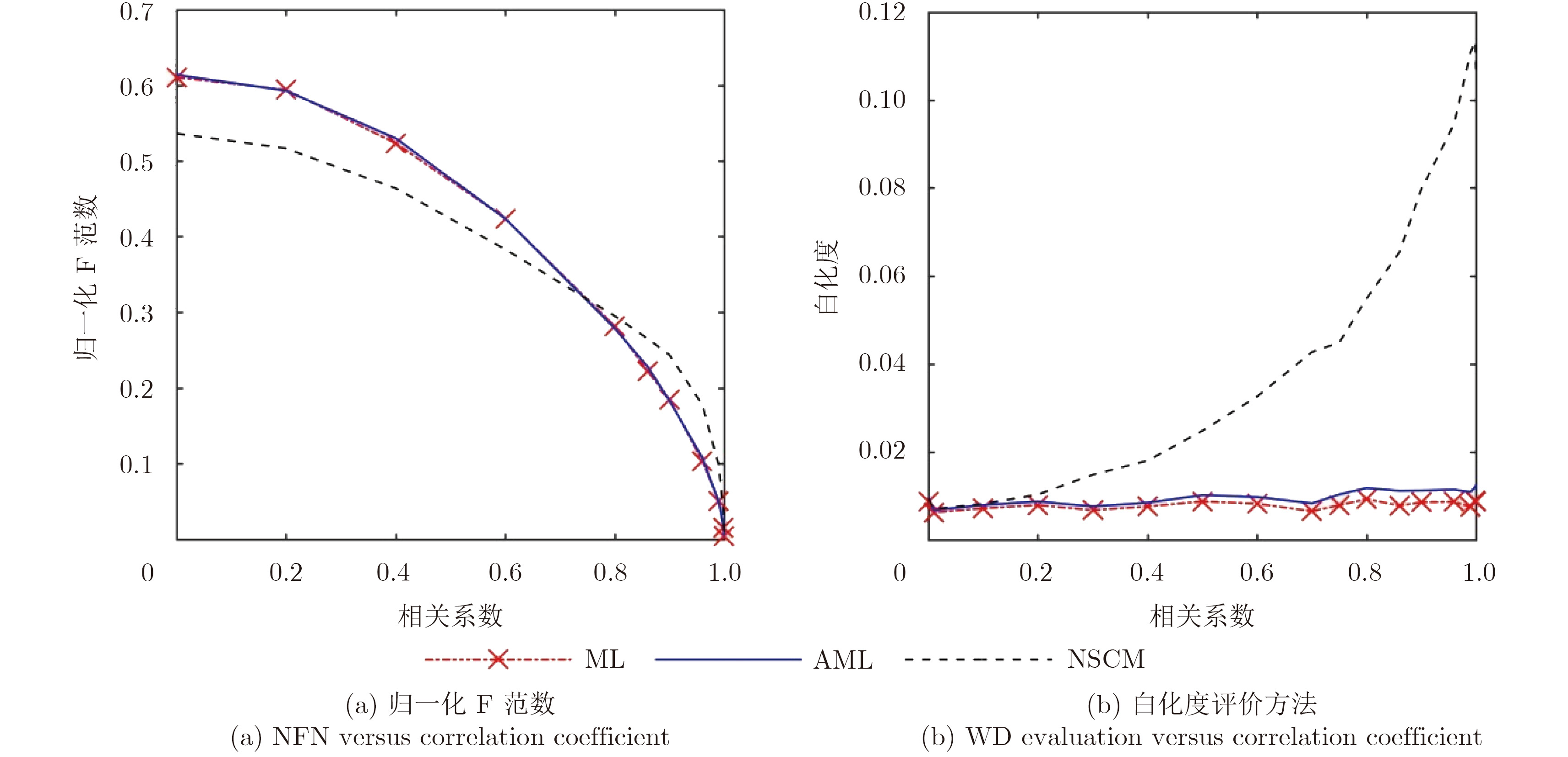
在海杂波背景下,散斑协方差矩阵估计性能严重影响着雷达自适应目标检测的准确性。针对不同散斑协方差矩阵估计方法,通常采用归一化F范数方法检验估计性能。但该检验方法需要已知真实协方差矩阵,在实际雷达系统中并不容易实现。鉴于该问题,该文提出了一种用于检验散斑协方差矩阵估计性能的白化度评价方法,充分利用了散斑协方差矩阵在白化滤波过程中的去相关作用。该方法将白化滤波后的杂波向量中脉冲间的相关程度作为评价指标,衡量散斑协方差矩阵估计方法的估计误差大小。与归一化F范数检验方法相比,该文提出的评价方法具有检验结果的一致性并且有效的避免了其在实测数据处理中的局限性。 在海杂波背景下,散斑协方差矩阵估计性能严重影响着雷达自适应目标检测的准确性。针对不同散斑协方差矩阵估计方法,通常采用归一化F范数方法检验估计性能。但该检验方法需要已知真实协方差矩阵,在实际雷达系统中并不容易实现。鉴于该问题,该文提出了一种用于检验散斑协方差矩阵估计性能的白化度评价方法,充分利用了散斑协方差矩阵在白化滤波过程中的去相关作用。该方法将白化滤波后的杂波向量中脉冲间的相关程度作为评价指标,衡量散斑协方差矩阵估计方法的估计误差大小。与归一化F范数检验方法相比,该文提出的评价方法具有检验结果的一致性并且有效的避免了其在实测数据处理中的局限性。
在海杂波背景下,散斑协方差矩阵估计性能严重影响着雷达自适应目标检测的准确性。针对不同散斑协方差矩阵估计方法,通常采用归一化F范数方法检验估计性能。但该检验方法需要已知真实协方差矩阵,在实际雷达系统中并不容易实现。鉴于该问题,该文提出了一种用于检验散斑协方差矩阵估计性能的白化度评价方法,充分利用了散斑协方差矩阵在白化滤波过程中的去相关作用。该方法将白化滤波后的杂波向量中脉冲间的相关程度作为评价指标,衡量散斑协方差矩阵估计方法的估计误差大小。与归一化F范数检验方法相比,该文提出的评价方法具有检验结果的一致性并且有效的避免了其在实测数据处理中的局限性。 在海杂波背景下,散斑协方差矩阵估计性能严重影响着雷达自适应目标检测的准确性。针对不同散斑协方差矩阵估计方法,通常采用归一化F范数方法检验估计性能。但该检验方法需要已知真实协方差矩阵,在实际雷达系统中并不容易实现。鉴于该问题,该文提出了一种用于检验散斑协方差矩阵估计性能的白化度评价方法,充分利用了散斑协方差矩阵在白化滤波过程中的去相关作用。该方法将白化滤波后的杂波向量中脉冲间的相关程度作为评价指标,衡量散斑协方差矩阵估计方法的估计误差大小。与归一化F范数检验方法相比,该文提出的评价方法具有检验结果的一致性并且有效的避免了其在实测数据处理中的局限性。


2017, 6(3): 292-299.
摘要:
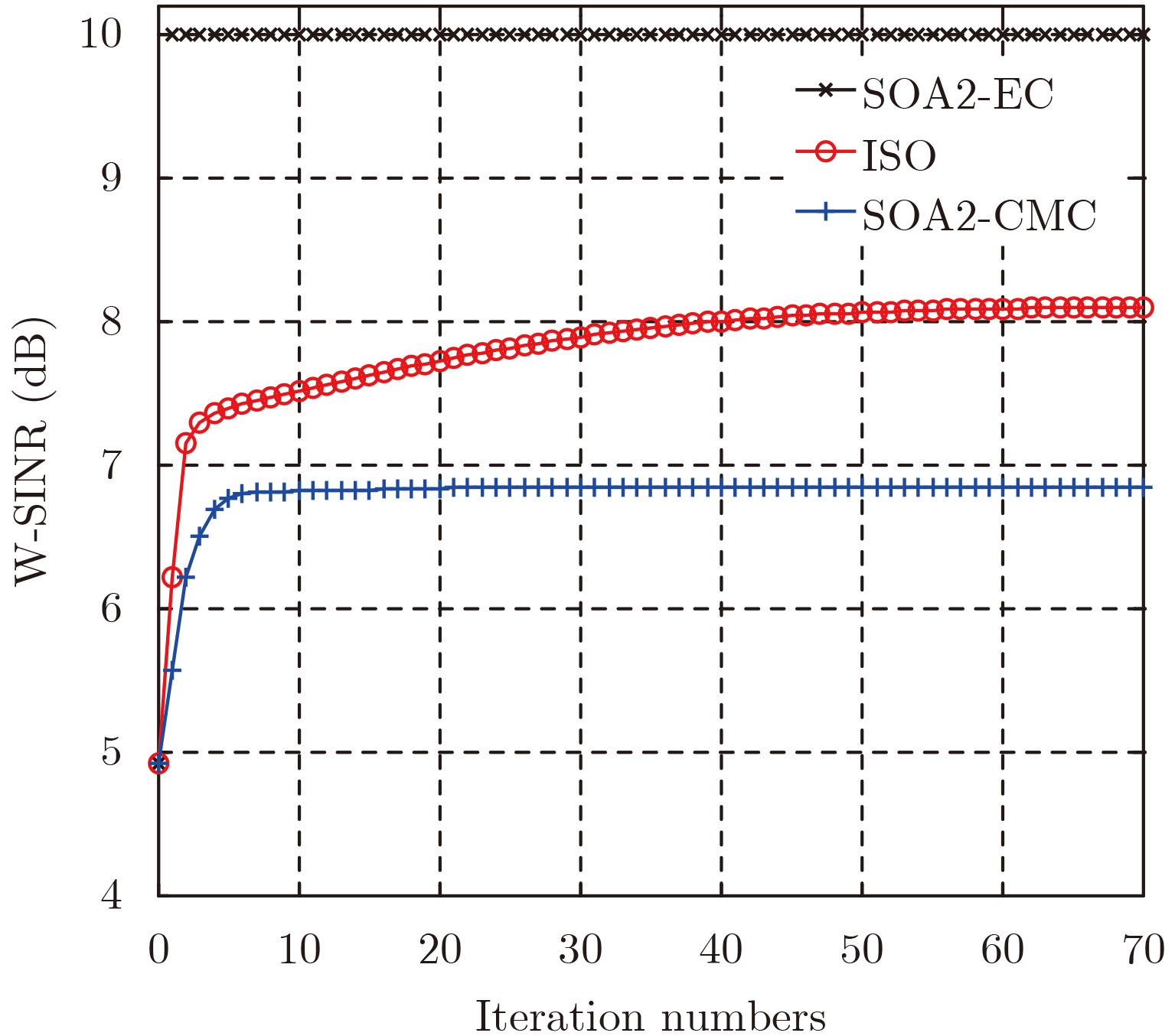
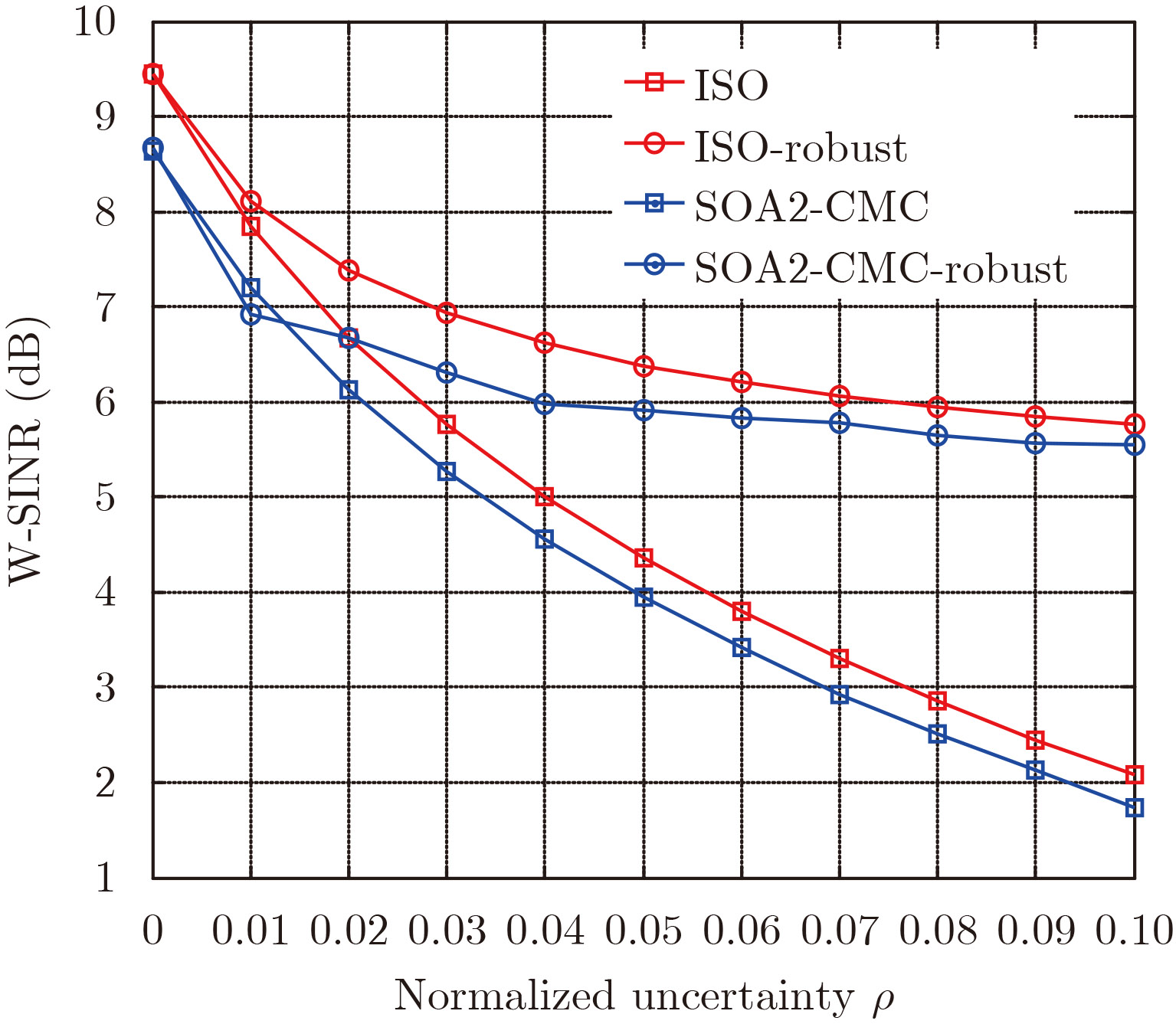
该文针对信号相关杂波环境下的运动目标检测问题,研究一种稳健的慢时间发射波形和接收滤波器设计方法。首先,基于杂波2阶统计特性不确定时的最坏SINR (the Worst-case SINR, W-SINR),建立非凸恒模约束下高维的发射-接收联合优化模型;然后,提出一种基于序列迭代的优化算法(Iterative Sequential Optimization, ISO)。每步迭代中,该算法将一个高维优化问题转化为多个1维分式规划问题,并通过丁克尔巴赫(Dinkelbach)方法进行求解。最后,仿真实验证明,ISO具有对抗不确定杂波信息的能力,使系统具有更好的适应能力;此外,相比半正定松弛(Semi-Definite Relaxation, SDR)与随机化方法,提出的算法在W-SINR优化值与计算复杂度上均具有明显的优势。 该文针对信号相关杂波环境下的运动目标检测问题,研究一种稳健的慢时间发射波形和接收滤波器设计方法。首先,基于杂波2阶统计特性不确定时的最坏SINR (the Worst-case SINR, W-SINR),建立非凸恒模约束下高维的发射-接收联合优化模型;然后,提出一种基于序列迭代的优化算法(Iterative Sequential Optimization, ISO)。每步迭代中,该算法将一个高维优化问题转化为多个1维分式规划问题,并通过丁克尔巴赫(Dinkelbach)方法进行求解。最后,仿真实验证明,ISO具有对抗不确定杂波信息的能力,使系统具有更好的适应能力;此外,相比半正定松弛(Semi-Definite Relaxation, SDR)与随机化方法,提出的算法在W-SINR优化值与计算复杂度上均具有明显的优势。
该文针对信号相关杂波环境下的运动目标检测问题,研究一种稳健的慢时间发射波形和接收滤波器设计方法。首先,基于杂波2阶统计特性不确定时的最坏SINR (the Worst-case SINR, W-SINR),建立非凸恒模约束下高维的发射-接收联合优化模型;然后,提出一种基于序列迭代的优化算法(Iterative Sequential Optimization, ISO)。每步迭代中,该算法将一个高维优化问题转化为多个1维分式规划问题,并通过丁克尔巴赫(Dinkelbach)方法进行求解。最后,仿真实验证明,ISO具有对抗不确定杂波信息的能力,使系统具有更好的适应能力;此外,相比半正定松弛(Semi-Definite Relaxation, SDR)与随机化方法,提出的算法在W-SINR优化值与计算复杂度上均具有明显的优势。 该文针对信号相关杂波环境下的运动目标检测问题,研究一种稳健的慢时间发射波形和接收滤波器设计方法。首先,基于杂波2阶统计特性不确定时的最坏SINR (the Worst-case SINR, W-SINR),建立非凸恒模约束下高维的发射-接收联合优化模型;然后,提出一种基于序列迭代的优化算法(Iterative Sequential Optimization, ISO)。每步迭代中,该算法将一个高维优化问题转化为多个1维分式规划问题,并通过丁克尔巴赫(Dinkelbach)方法进行求解。最后,仿真实验证明,ISO具有对抗不确定杂波信息的能力,使系统具有更好的适应能力;此外,相比半正定松弛(Semi-Definite Relaxation, SDR)与随机化方法,提出的算法在W-SINR优化值与计算复杂度上均具有明显的优势。

2017, 6(3): 300-308.
摘要:
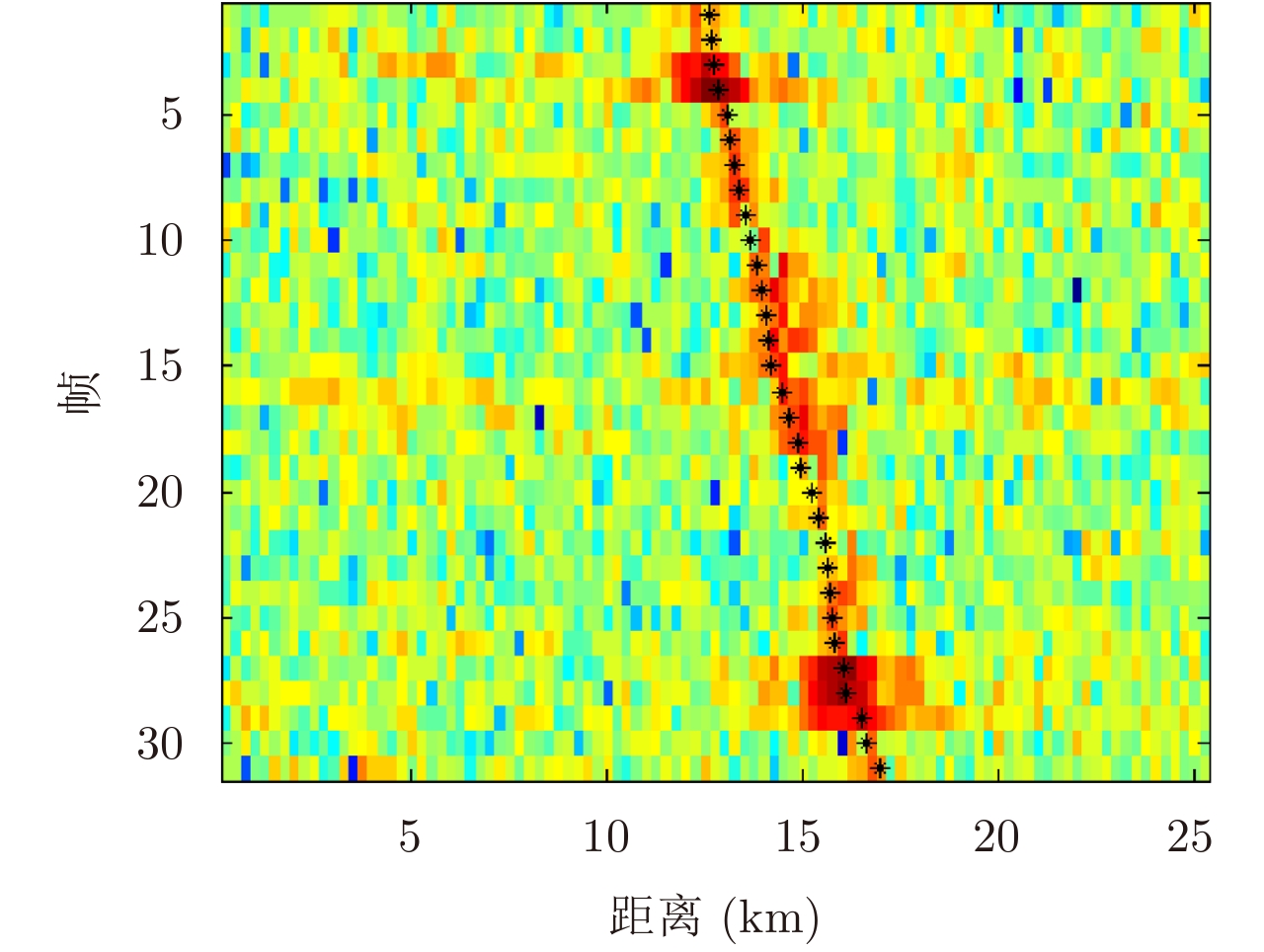
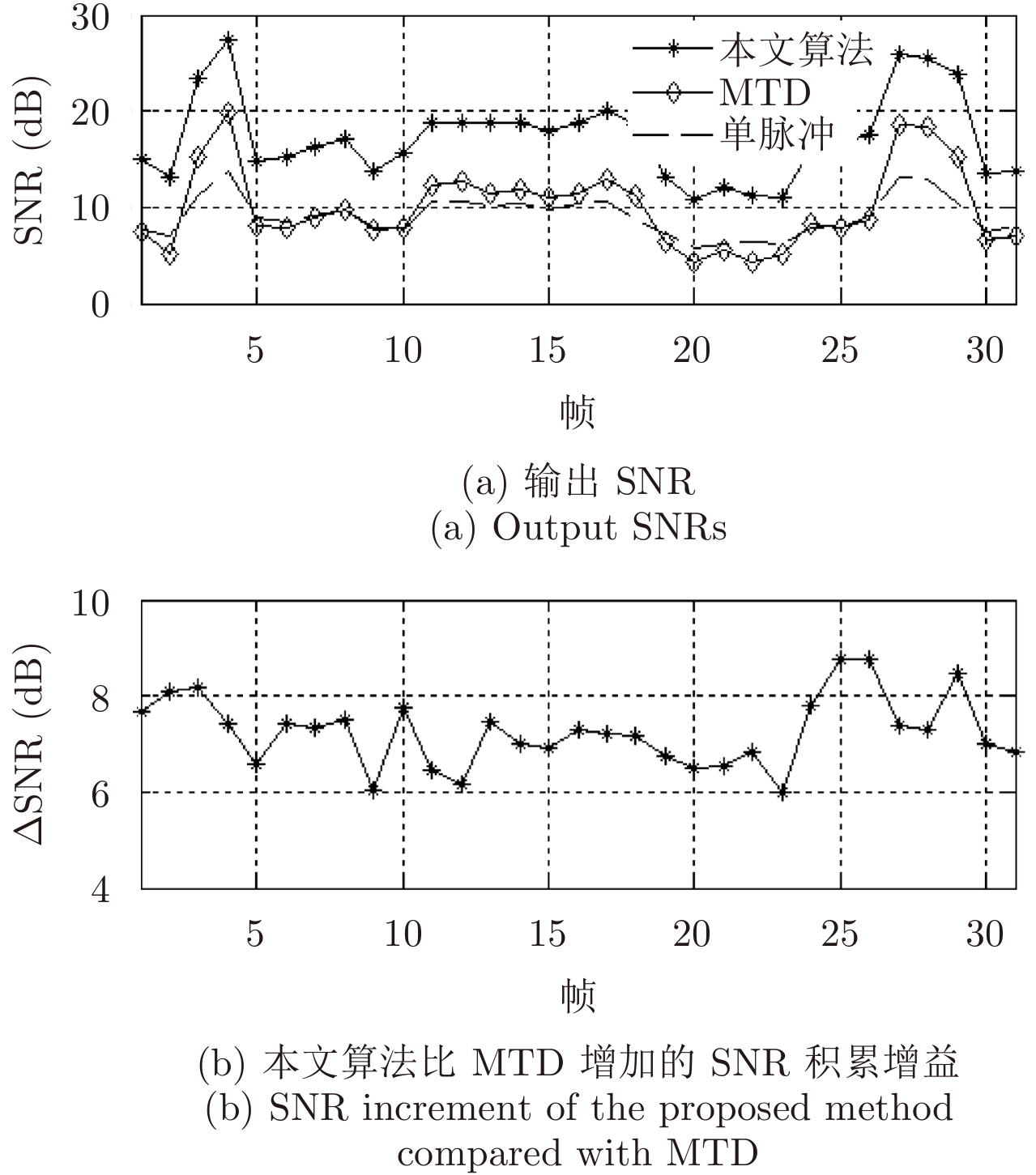
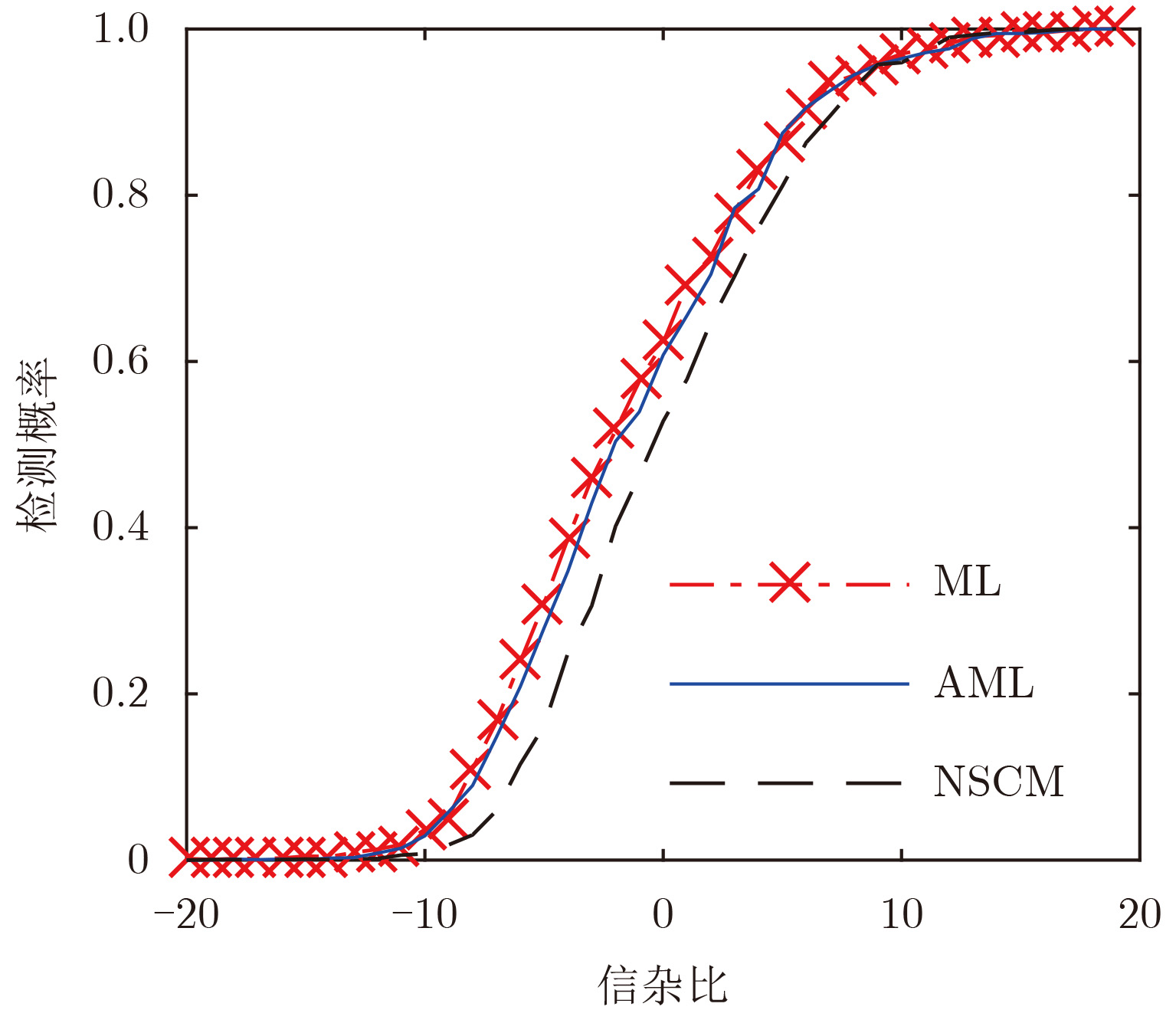
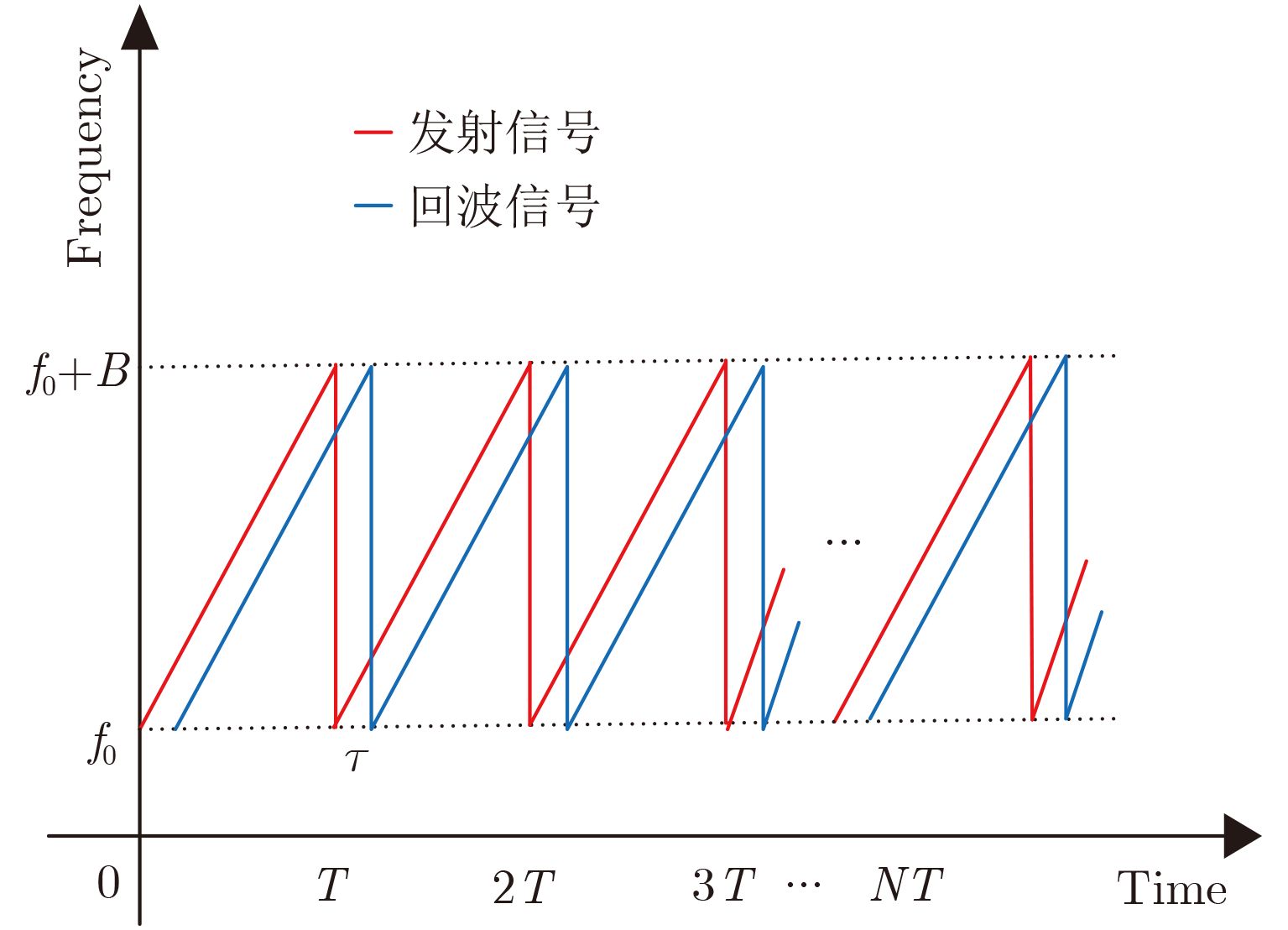
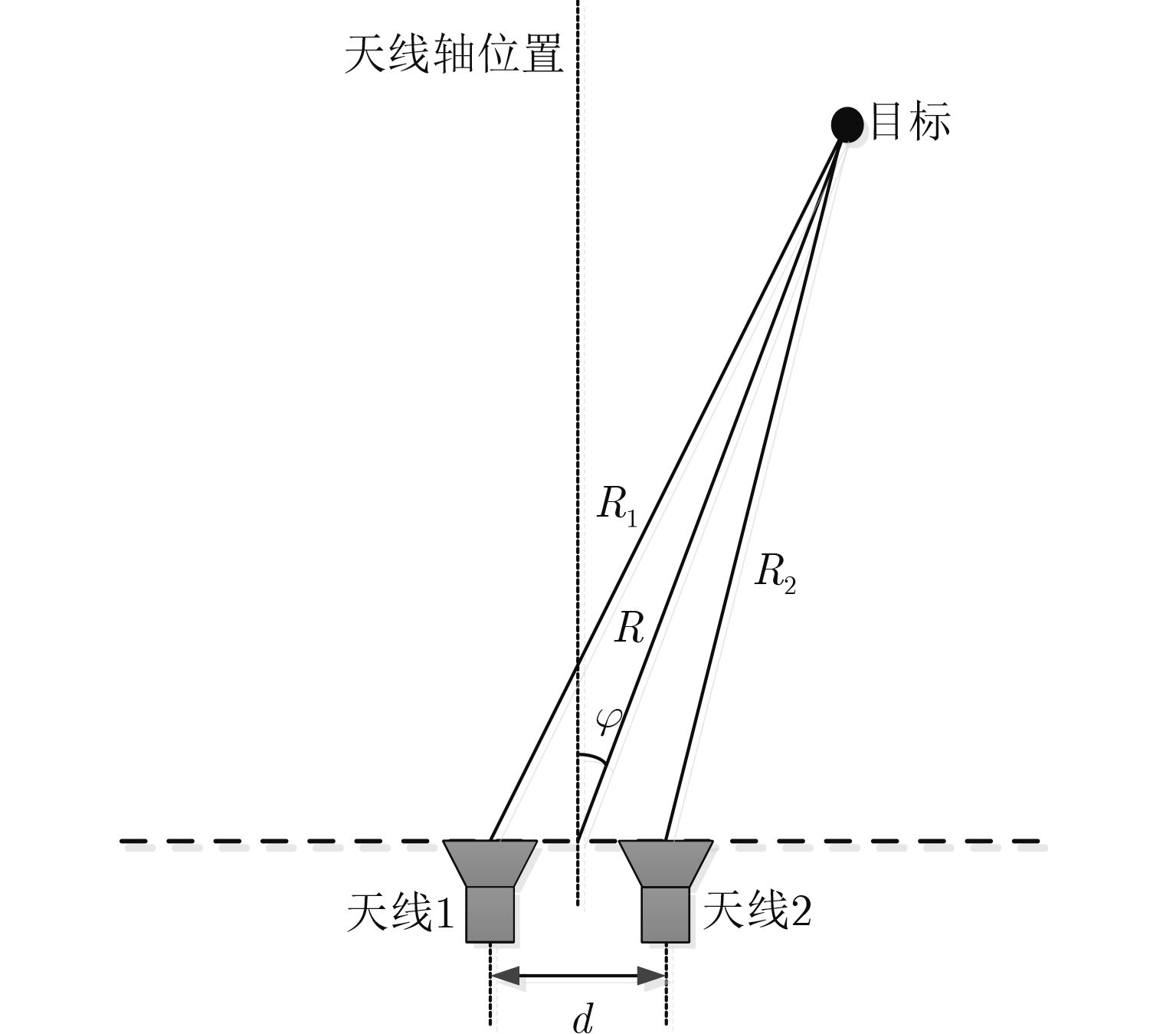
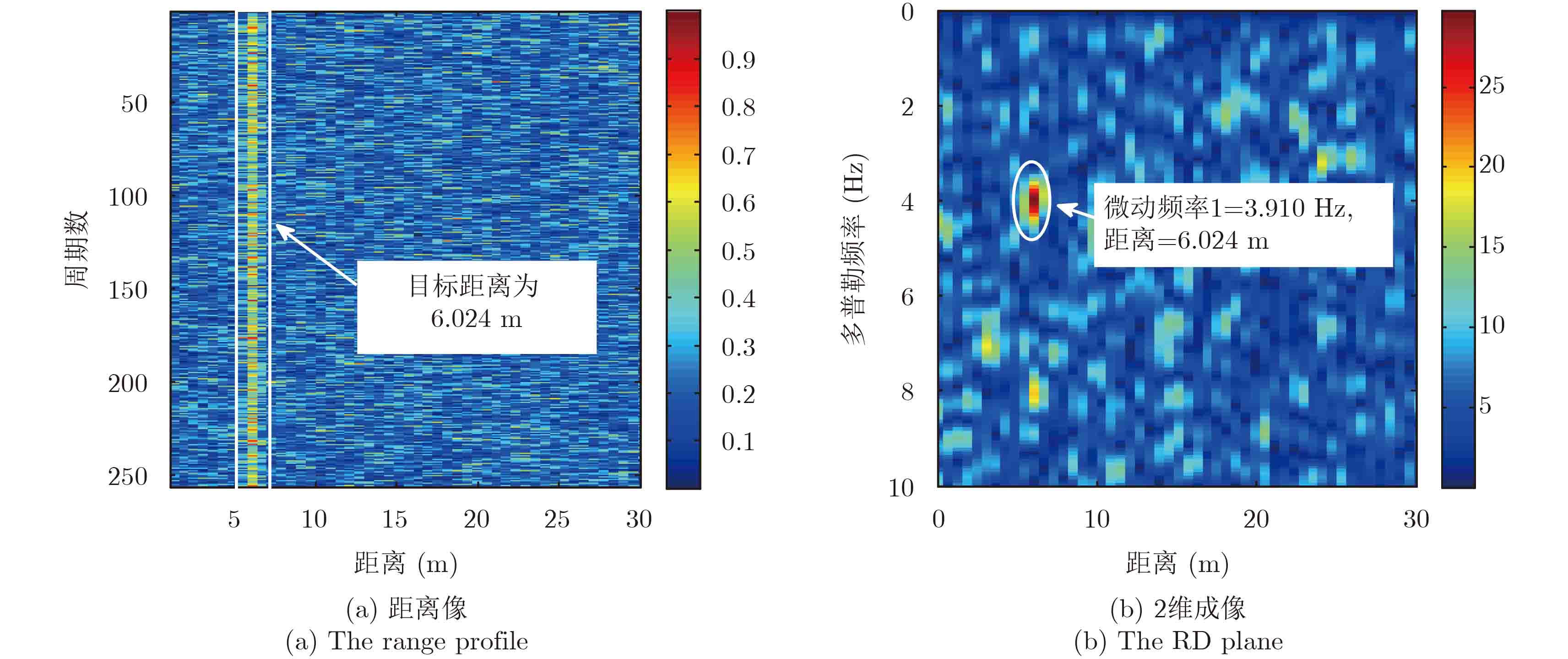
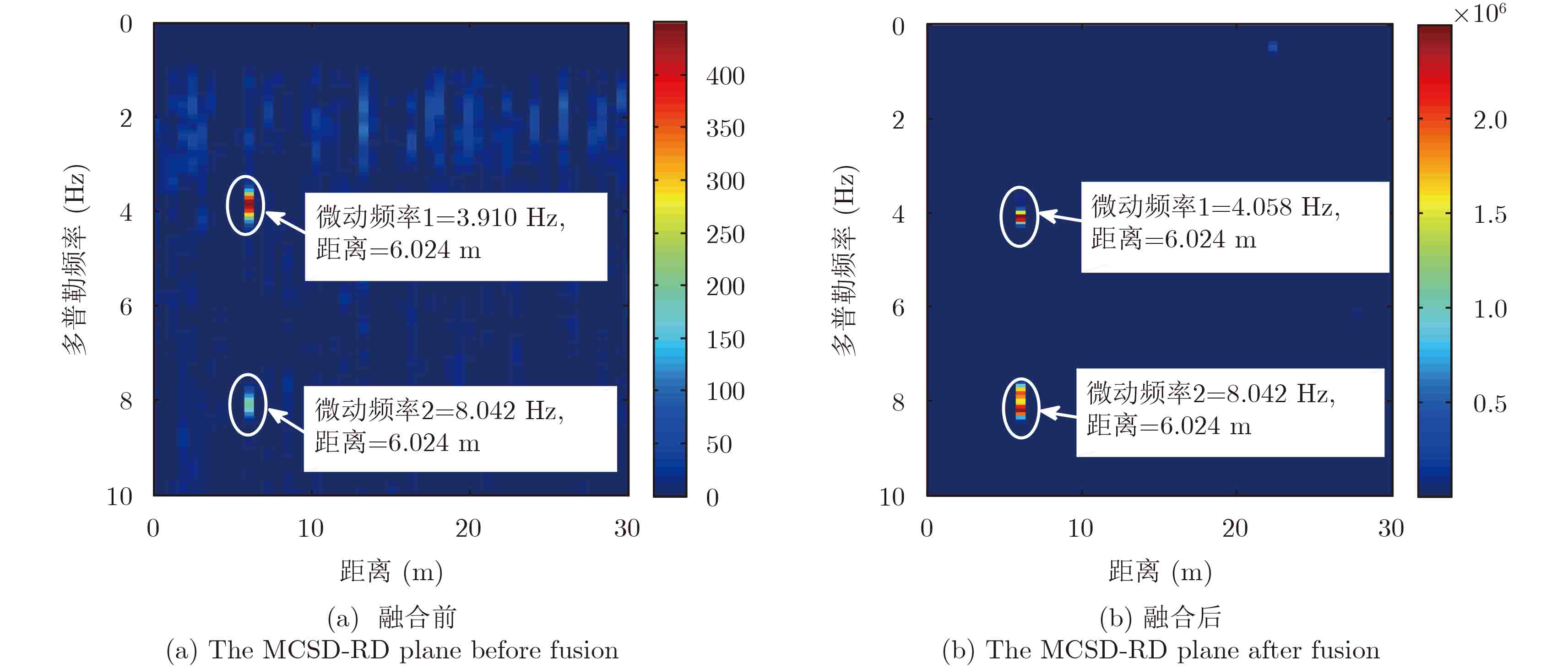
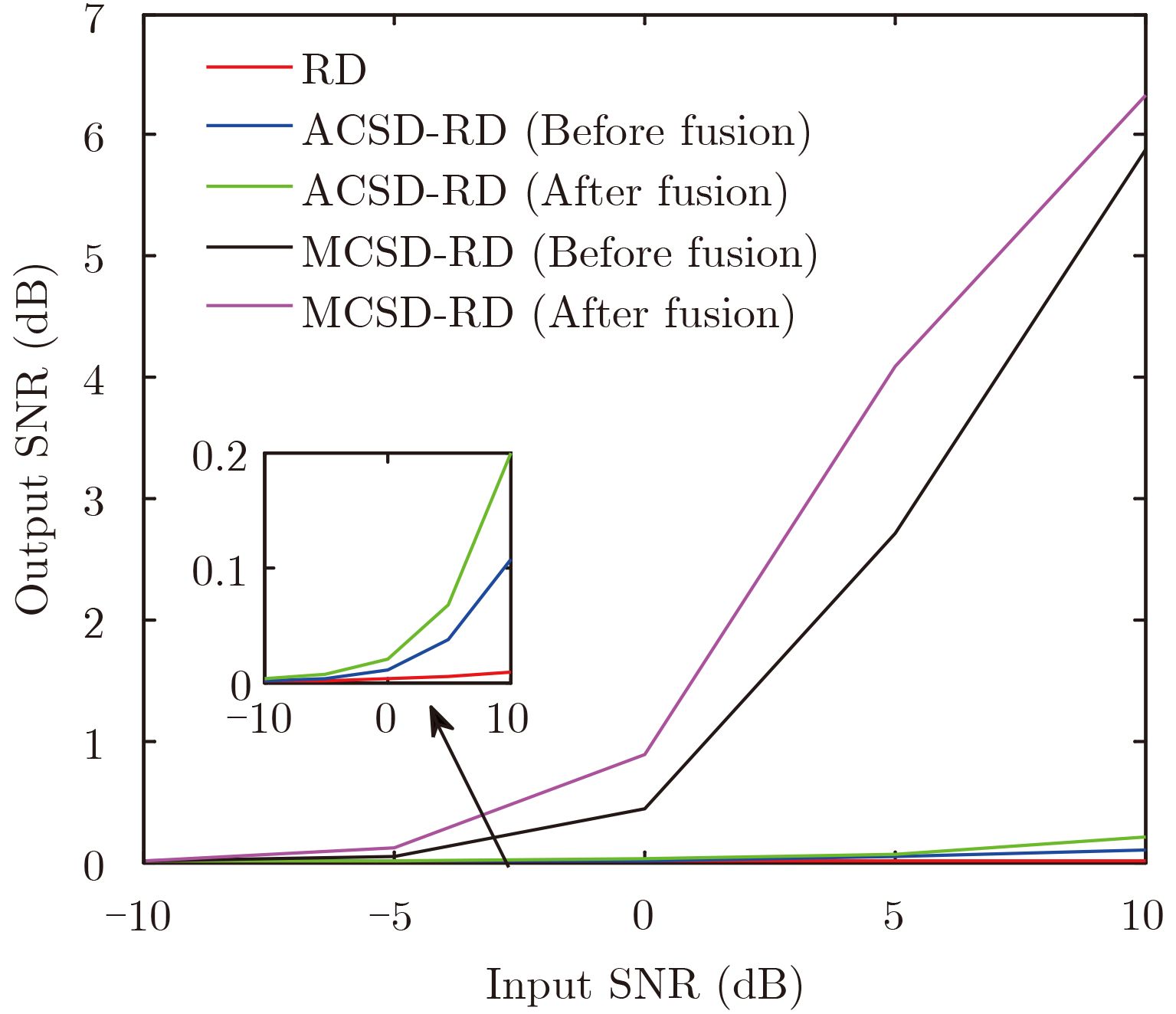
针对非高斯背景下微动目标的参数估计问题,该文采用单发多收(SIMO)的线性调频连续波(LFMCW)雷达系统,提出了一种基于互相关熵的微动参数估计方法。该方法利用多通道回波信号的2阶和高阶信息,对回波中所含的目标信息实现更准确的量化,从而得到更好的微动参数估计效果。在非高斯背景下,相比传统傅里叶变换的方法,该方法能在微动目标的成像效果中实现更好的雷达成像效果以及更高的输出信噪比。同时,该文采用单脉冲比相(PCM)定位的方法,通过提取多通道回波的相位信息,计算不同通道间的相位差和目标的方位角,从而实现了对微动目标的准确定位。最后,仿真结果证明了该方法的有效性。 针对非高斯背景下微动目标的参数估计问题,该文采用单发多收(SIMO)的线性调频连续波(LFMCW)雷达系统,提出了一种基于互相关熵的微动参数估计方法。该方法利用多通道回波信号的2阶和高阶信息,对回波中所含的目标信息实现更准确的量化,从而得到更好的微动参数估计效果。在非高斯背景下,相比传统傅里叶变换的方法,该方法能在微动目标的成像效果中实现更好的雷达成像效果以及更高的输出信噪比。同时,该文采用单脉冲比相(PCM)定位的方法,通过提取多通道回波的相位信息,计算不同通道间的相位差和目标的方位角,从而实现了对微动目标的准确定位。最后,仿真结果证明了该方法的有效性。
针对非高斯背景下微动目标的参数估计问题,该文采用单发多收(SIMO)的线性调频连续波(LFMCW)雷达系统,提出了一种基于互相关熵的微动参数估计方法。该方法利用多通道回波信号的2阶和高阶信息,对回波中所含的目标信息实现更准确的量化,从而得到更好的微动参数估计效果。在非高斯背景下,相比传统傅里叶变换的方法,该方法能在微动目标的成像效果中实现更好的雷达成像效果以及更高的输出信噪比。同时,该文采用单脉冲比相(PCM)定位的方法,通过提取多通道回波的相位信息,计算不同通道间的相位差和目标的方位角,从而实现了对微动目标的准确定位。最后,仿真结果证明了该方法的有效性。 针对非高斯背景下微动目标的参数估计问题,该文采用单发多收(SIMO)的线性调频连续波(LFMCW)雷达系统,提出了一种基于互相关熵的微动参数估计方法。该方法利用多通道回波信号的2阶和高阶信息,对回波中所含的目标信息实现更准确的量化,从而得到更好的微动参数估计效果。在非高斯背景下,相比传统傅里叶变换的方法,该方法能在微动目标的成像效果中实现更好的雷达成像效果以及更高的输出信噪比。同时,该文采用单脉冲比相(PCM)定位的方法,通过提取多通道回波的相位信息,计算不同通道间的相位差和目标的方位角,从而实现了对微动目标的准确定位。最后,仿真结果证明了该方法的有效性。



2017, 6(3): 309-315.
摘要:
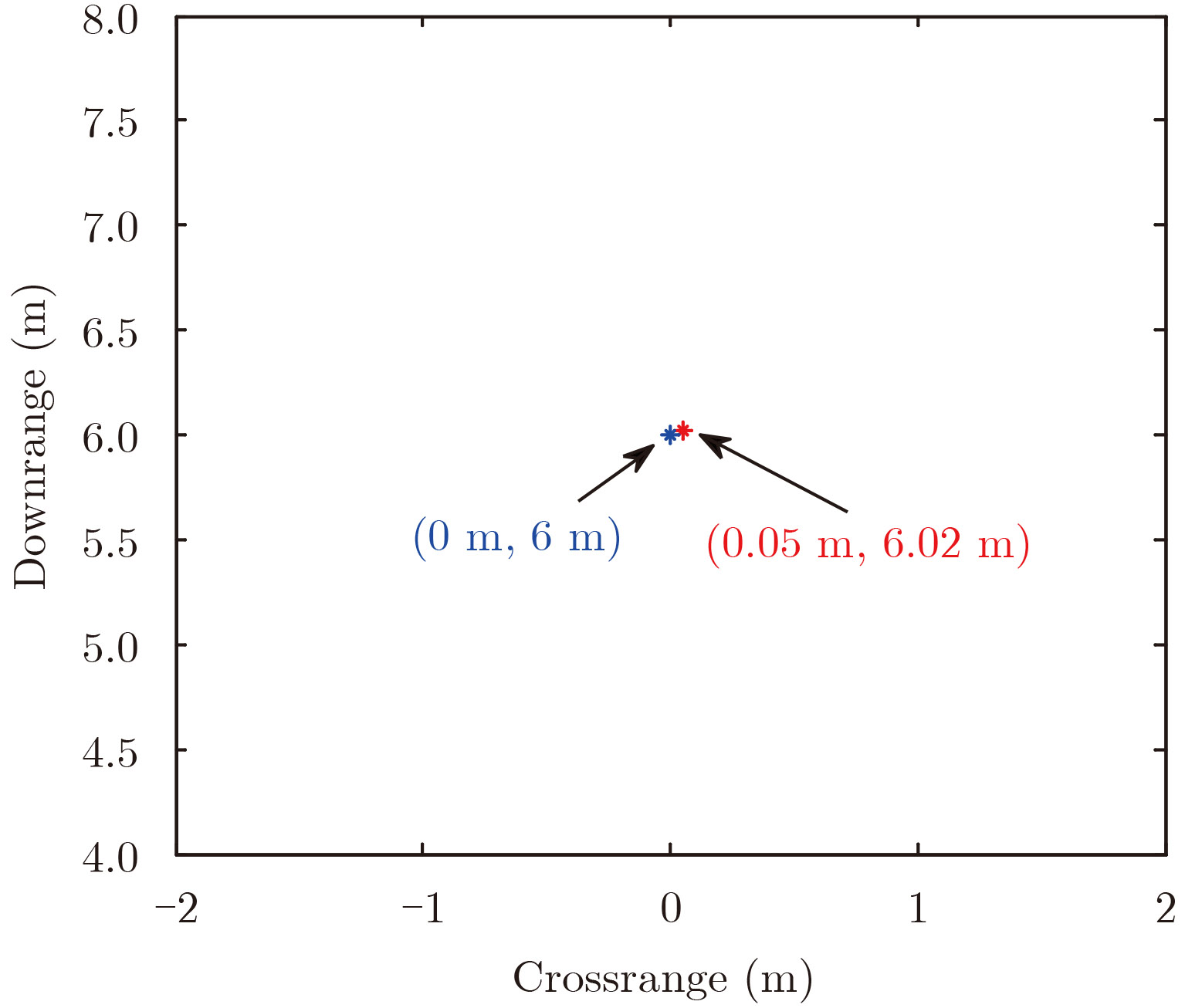
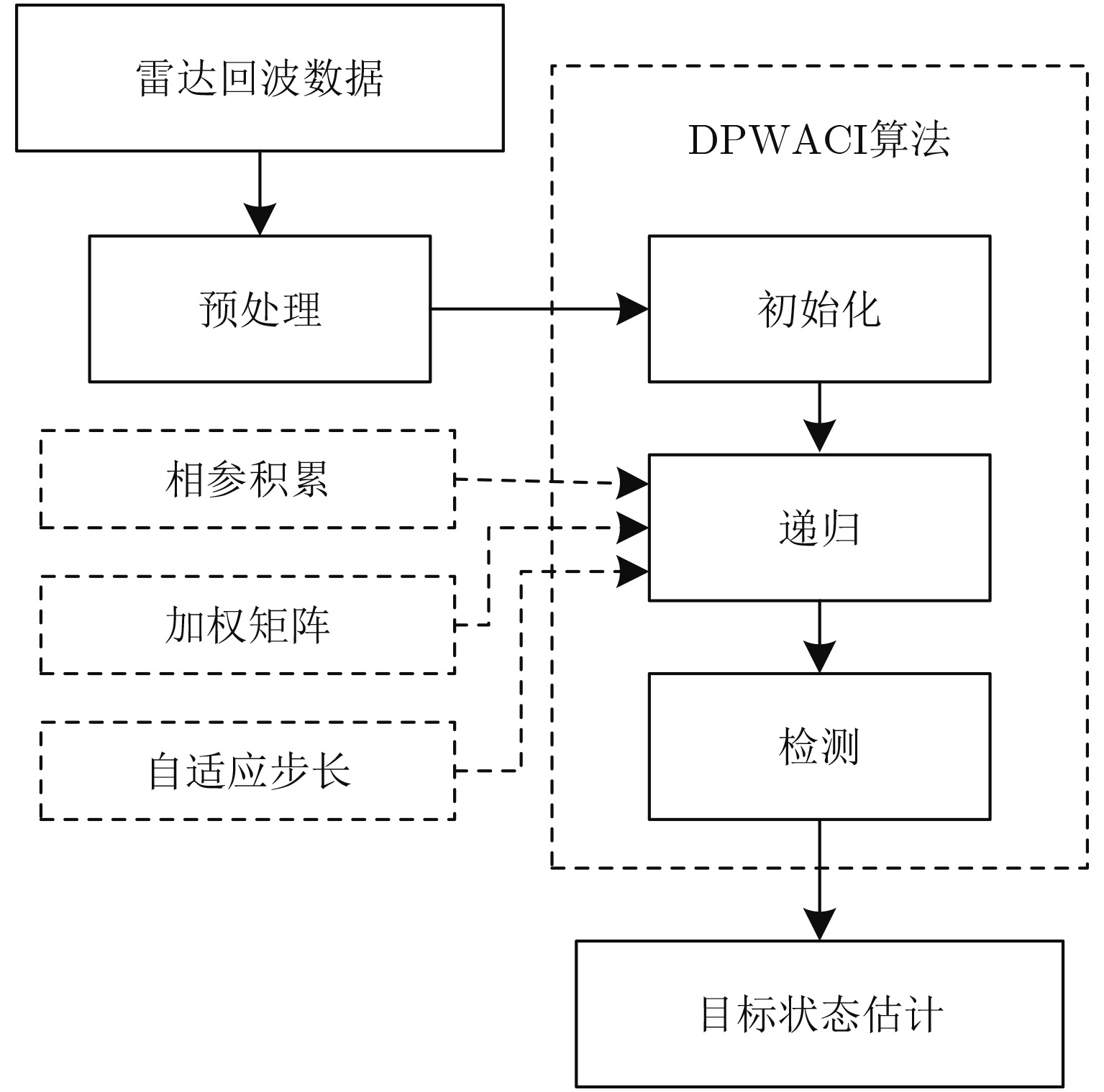
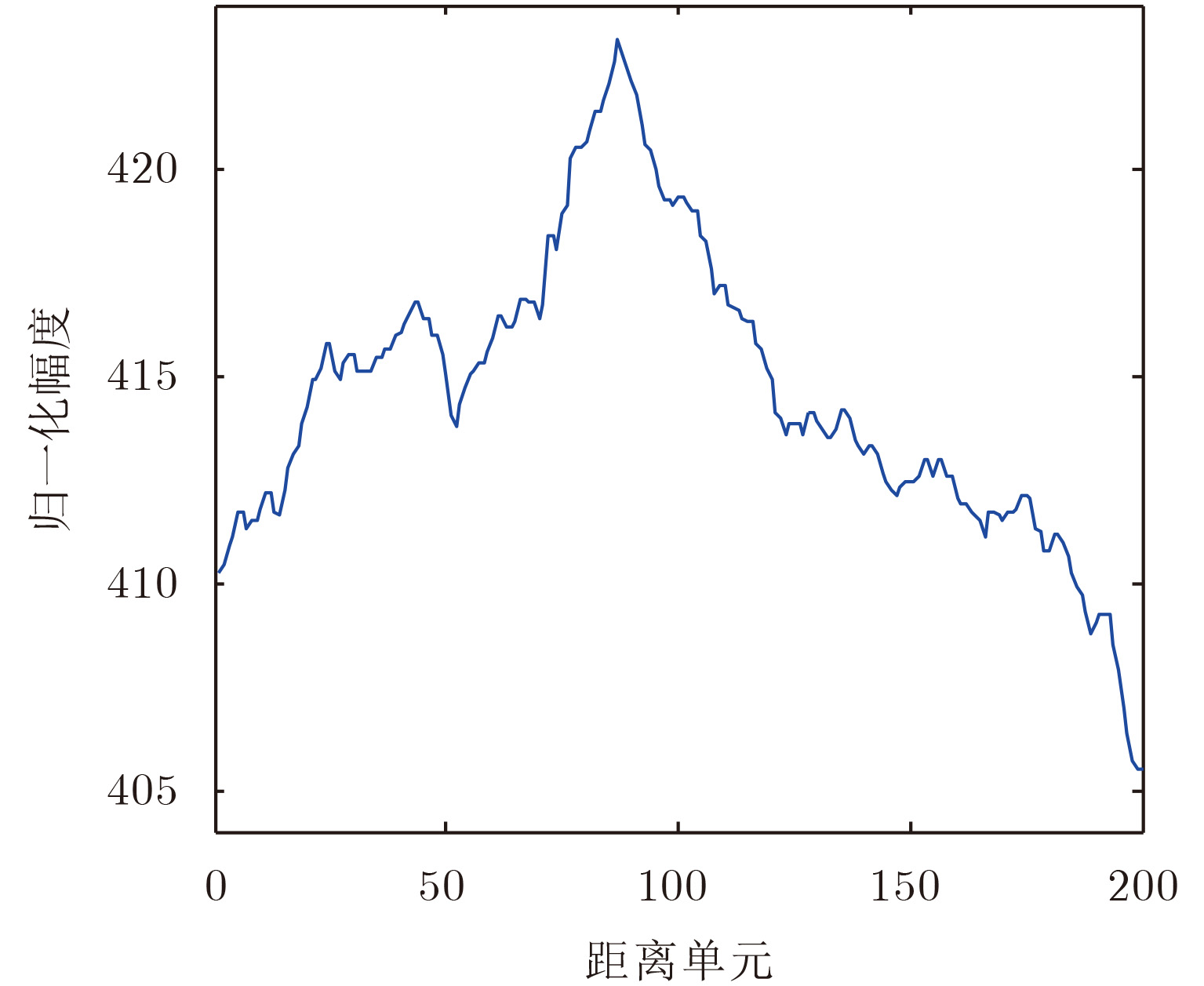
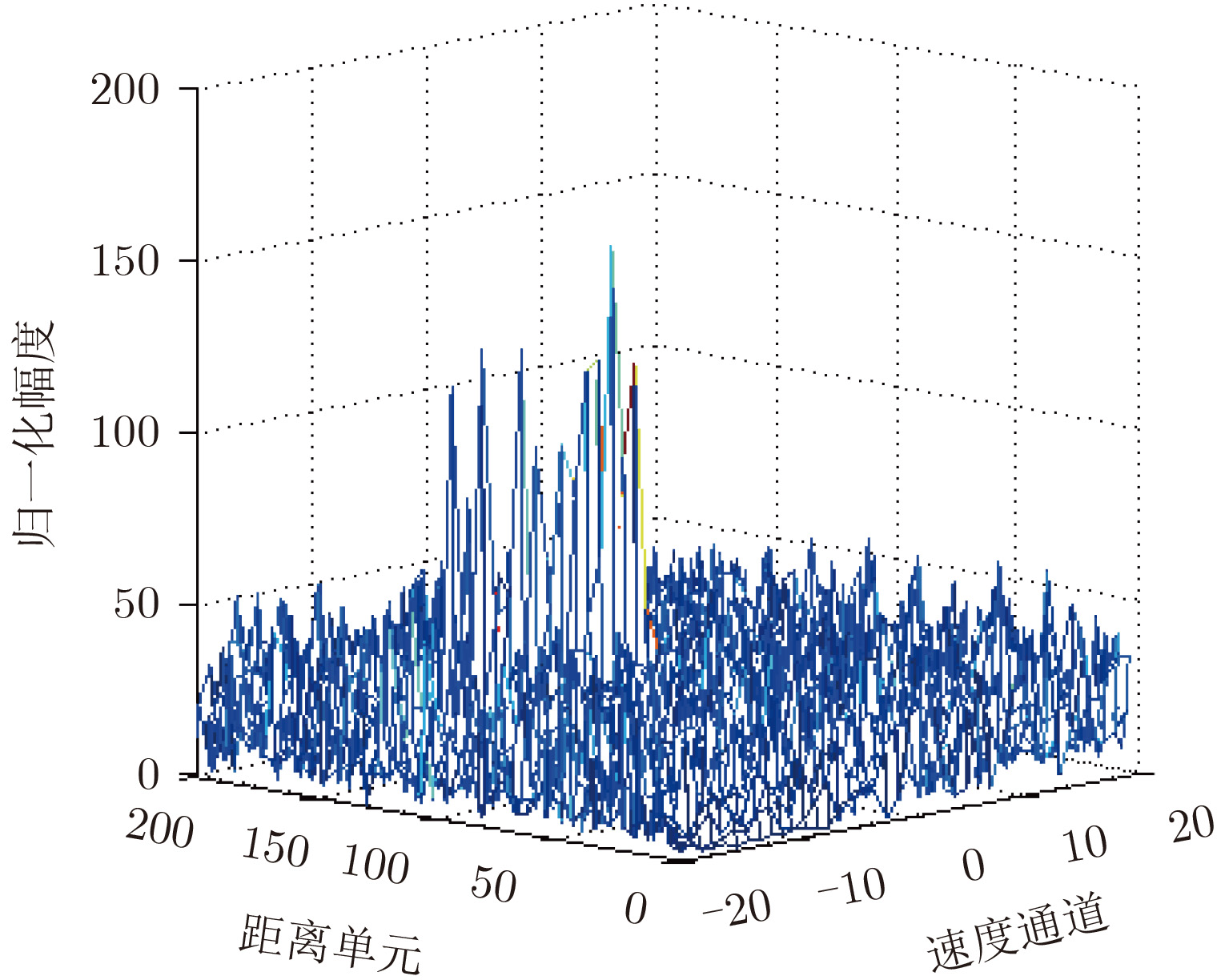
针对机动目标径向速度变化和距离徙动与多普勒扩展的耦合关系,该文提出一种基于动态规划的加权自适应相参积累(DPWACI)方法。该方法能够沿着目标运动轨迹进行高效能量积累。首先,加权的动态规划过程能够精确搜索目标各时刻的位置与速度;其次,改进的相参积累能够对整个过程中的相位扩展进行多普勒校正;最后,自适应步长能够在不同速度搜索通道采用相应的相参积累时间。该算法无需估计具体运动参数,适用于任意机动方式。仿真结果和性能对比展示了该算法的估计精确性以及相较于传统算法的优越性。 针对机动目标径向速度变化和距离徙动与多普勒扩展的耦合关系,该文提出一种基于动态规划的加权自适应相参积累(DPWACI)方法。该方法能够沿着目标运动轨迹进行高效能量积累。首先,加权的动态规划过程能够精确搜索目标各时刻的位置与速度;其次,改进的相参积累能够对整个过程中的相位扩展进行多普勒校正;最后,自适应步长能够在不同速度搜索通道采用相应的相参积累时间。该算法无需估计具体运动参数,适用于任意机动方式。仿真结果和性能对比展示了该算法的估计精确性以及相较于传统算法的优越性。
针对机动目标径向速度变化和距离徙动与多普勒扩展的耦合关系,该文提出一种基于动态规划的加权自适应相参积累(DPWACI)方法。该方法能够沿着目标运动轨迹进行高效能量积累。首先,加权的动态规划过程能够精确搜索目标各时刻的位置与速度;其次,改进的相参积累能够对整个过程中的相位扩展进行多普勒校正;最后,自适应步长能够在不同速度搜索通道采用相应的相参积累时间。该算法无需估计具体运动参数,适用于任意机动方式。仿真结果和性能对比展示了该算法的估计精确性以及相较于传统算法的优越性。 针对机动目标径向速度变化和距离徙动与多普勒扩展的耦合关系,该文提出一种基于动态规划的加权自适应相参积累(DPWACI)方法。该方法能够沿着目标运动轨迹进行高效能量积累。首先,加权的动态规划过程能够精确搜索目标各时刻的位置与速度;其次,改进的相参积累能够对整个过程中的相位扩展进行多普勒校正;最后,自适应步长能够在不同速度搜索通道采用相应的相参积累时间。该算法无需估计具体运动参数,适用于任意机动方式。仿真结果和性能对比展示了该算法的估计精确性以及相较于传统算法的优越性。



2017, 6(3): 316-323.
摘要:
低信噪比下压缩感知稀疏重构的性能不佳,使得前视阵列SAR稀疏3维成像的质量大大降低。为此,该文结合散射系数矢量在原始的距离向和斜距离向2维空间中的连续性特征,借鉴信号检测中常用的直线检测思路和方法,提出基于霍夫变换的压缩感知稀疏重构算法,有效提高压缩感知稀疏重构的性能。同时,仿真实验结果表明,该方法有效实现了低信噪比下前视阵列SAR的稀疏3维成像。 低信噪比下压缩感知稀疏重构的性能不佳,使得前视阵列SAR稀疏3维成像的质量大大降低。为此,该文结合散射系数矢量在原始的距离向和斜距离向2维空间中的连续性特征,借鉴信号检测中常用的直线检测思路和方法,提出基于霍夫变换的压缩感知稀疏重构算法,有效提高压缩感知稀疏重构的性能。同时,仿真实验结果表明,该方法有效实现了低信噪比下前视阵列SAR的稀疏3维成像。
低信噪比下压缩感知稀疏重构的性能不佳,使得前视阵列SAR稀疏3维成像的质量大大降低。为此,该文结合散射系数矢量在原始的距离向和斜距离向2维空间中的连续性特征,借鉴信号检测中常用的直线检测思路和方法,提出基于霍夫变换的压缩感知稀疏重构算法,有效提高压缩感知稀疏重构的性能。同时,仿真实验结果表明,该方法有效实现了低信噪比下前视阵列SAR的稀疏3维成像。 低信噪比下压缩感知稀疏重构的性能不佳,使得前视阵列SAR稀疏3维成像的质量大大降低。为此,该文结合散射系数矢量在原始的距离向和斜距离向2维空间中的连续性特征,借鉴信号检测中常用的直线检测思路和方法,提出基于霍夫变换的压缩感知稀疏重构算法,有效提高压缩感知稀疏重构的性能。同时,仿真实验结果表明,该方法有效实现了低信噪比下前视阵列SAR的稀疏3维成像。





 微信 | 公众平台
微信 | 公众平台 

