
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
Adaptive Detectors for Two Types of Subspace Targets in an Inverse Gamma Textured Background
-
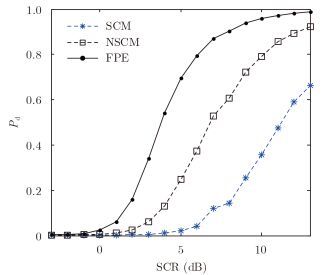
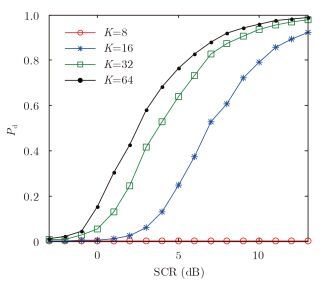
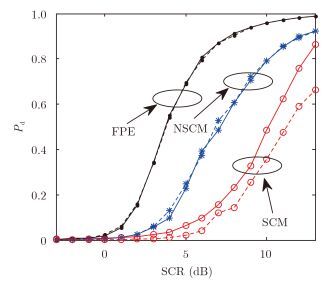
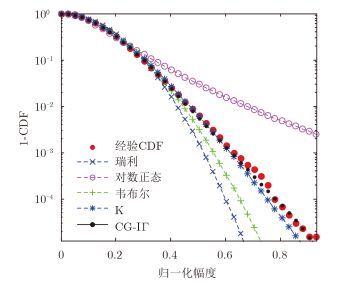
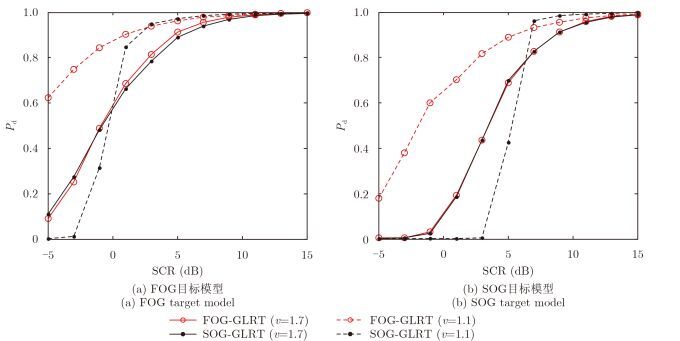
摘要: 该文在复合高斯海杂波背景下,以逆Gamma分布作为纹理分量的先验分布模型,研究了1阶高斯(First Order Gaussian, FOG)和2阶高斯(Second Order Gaussian, SOG)两类子空间目标的自适应检测问题。采用两步广义似然比(Generalized Likelihood Ratio Test, GLRT)推导了检测统计量,并分别采用采样协方差矩阵(Sample Covariance Matrix, SCM)、归一化采样协方差矩阵(Normalized Sample Covariance Matrix, NSCM)和定点估计(Function Point Estimation, FPE)作为协方差矩阵估计值,与GLRT相结合,构造出新的自适应检测器。由于该文检测器在设计阶段考虑了海杂波的先验分布模型,且在检测阶段采用了与工作环境相匹配的模型参数,经性能分析与验证,其在检测性能上优于已有匹配滤波(Adaptive Matched Filter, AMF)和归一化匹配滤波(Adaptive Normalized Matched Filter, ANMF)检测器。Abstract: Considering an inverse Gamma prior distribution model for texture, the adaptive detection problems for both first order Gaussian and second order Gaussian subspace targets are researched in a compound Gaussian sea clutter. Test statistics are derived on the basis of the two-step generalized likelihood ratio test. From these tests, new adaptive detectors are proposed by substituting the covariance matrix with estimation results from the Sample Covariance Matrix (SCM), normalized SCM, and fixed point estimator. The proposed detectors consider the prior distribution model for sea clutter during the design stage, and they model parameters that match the working environment during the detection stage. Analysis and validation results indicate that the detection performance of the proposed detectors out performs existing AMF (Adaptive Matched Filter, AMF) and ANMF (Adaptive Normalized Matched Filter, ANMF) detectors.
-
Key words:
- Adaptive detection /
- Compound Gaussian model /
- Inverse Gamma texture /
- Subspace targets
-
[1] 何友, 黄勇, 关键, 等.海杂波中的雷达目标检测技术综述[J].现代雷达, 2014, 36(12): 1-9. doi: 10.3969/j.issn.1004-7859.2014.12.001He Y, Huang Y, Guan J, et al.. An overview on radar target detection in sea clutter[J]. Modern Radar, 2014, 36(12): 1-9. doi: 10.3969/j.issn.1004-7859.2014.12.001 [2] Ward K, Tough R, and Watts S. Sea Clutter: Scattering, the K-Distribution and Radar Performance, 2nd ed[M]. London: The Institution of Engineering and Technology, 2013. [3] Gini F and Farina A. Vector subspace detection in compound-Gaussian clutter, Part Ⅰ: Surgey and new results[J]. IEEE Transactions on Aerospace and Electronic Systems, 2002, 38(4): 1295-1311. doi: 10.1109/TAES.2002.1145751 [4] Conte E, Lops M, and Ricci G. Asymptotically optimum radar detection in compound-Gaussian clutter[J]. IEEE Transactions on Aerospace and Electronic Systems, 1995, 31(2): 617-625. doi: 10.1109/7.381910 [5] Gini F. Suboptimum coherent radar detection in a mixture of K-distributed and Gaussian clutter[J]. IEE Proceedings, Radar, Sonar and Navigation, 1997, 144(1): 39-48. doi: 10.1049/ip-rsn:19970967 [6] Jin Y and Friedlander B. A CFAR adaptive subspace detector for second-order Gaussian signals[J]. IEEE Transactions on Signal Processing, 2005, 53(3): 871-884. doi: 10.1109/TSP.2004.842196 [7] Bon N, Khenchaf A, and Garello R. GLRT subspace detection for range and Doppler distributed targets[J]. IEEE Transactions on Aerospace and Electronic Systems, 2008, 44(2): 678-696. doi: 10.1109/TAES.2008.4560214 [8] Liu J, Zhang Z J, Yang Y, et al.. A CFAR adaptive subspace detector for first-order or second-order Gaussian signals based on a single observation[J]. IEEE Transactions on Signal Processing, 2011, 59(11): 5126-5140. doi: 10.1109/TSP.2011.2164073 [9] Robey F C, Fuhrman D L, Kelly E J, et al.. A CFAR adaptive matched filter detector[J]. IEEE Transactions on Aerospace and Electronic Systems, 1992, 28(1): 208-216. doi: 10.1109/7.135446 [10] Kraut S, Scharf L L, and McWhorter L T. Adaptive subspace detectors[J]. IEEE Transactions on Signal Processing, 2001, 49(1): 1-16. doi: 10.1109/78.890324 [11] Kraut S and Scharf L L. The CFAR adaptive subspace detector is a scale-invariant GLRT[J]. IEEE Transactions on Signal Processing, 1999, 47(9): 2538-2541. doi: 10.1109/78.782198 [12] Liu W J, Xie W C, Liu J, et al.. Adaptive double subspace signal detection in Gaussian background—Part Ⅰ: Homogeneous environments[J]. IEEE Transactions on Signal Processing, 2014, 62(9): 2345-2357. doi: 10.1109/TSP.2014.2309556 [13] Liu W J, Xie W C, Liu J, et al.. Adaptive double subspace signal detection in Gaussian background—Part Ⅱ: Partially homogeneous environments[J]. IEEE Transactions on Signal Processing, 2014, 62(9): 2358-2369. doi: 10.1109/TSP.2014.2309553 [14] 丁昊, 薛永华, 黄勇, 等.均匀和部分均匀杂波中子空间目标的斜对称自适应检测方法[J].雷达学报, 2015, 4(4): 418-430. http://radars.ie.ac.cn/CN/abstract/abstract277.shtmlDing H, Xue Y H, Huang Y, et al.. Persymmetric adaptive detectors of subspace signals in homogeneous and partially homogeneous clutter[J]. Jounal of Radars, 2015, 4(4): 418-430. http://radars.ie.ac.cn/CN/abstract/abstract277.shtml [15] JIAN T, HE Y, LIAO G S, et al.. Adaptive persymmetric detector of generalised likelihood ratio test in homogeneous environment[J]. IET Signal Processing, 2016, 10(2): 91-99. doi: 10.1049/iet-spr.2015.0200 [16] Conte E, Lops M, and Ricci G. Adaptive matched filter detection in spherically invariant noise[J]. IEEE Signal Processing Letters, 1996, 3(8): 248-250. doi: 10.1109/97.511809 [17] Conte E and Maio A D. Mitigation techniques for non-Gaussian sea clutter[J]. IEEE Journal of Ocean Engineering, 2004, 29(2): 284-302. doi: 10.1109/JOE.2004.826901 [18] Gao Y C, Liao G S, and Liu W J. High resolution radar detection in interference and non-homogeneous noise[J]. IEEE Signal Processing Letters, 2016. DOI: 10.1109/ LSP.2016.2597738. [19] 刘明, 水鹏朗.海杂波背景下的组合自适应GLRT-LTD[J].电子与信息学报, 2015, 37(12): 2834-2990. http://www.cnki.com.cn/Article/CJFDTOTAL-DZYX201512028.htmLiu M and Shui P L. Combined adaptive GLRT-LTD against sea clutter[J]. Journal of Electronics & Information Technology, 2015, 37(12): 2834-2990. http://www.cnki.com.cn/Article/CJFDTOTAL-DZYX201512028.htm [20] GAO Y C, LIAO G S, ZHU S Q, et al.. A persymmetric GLRT for adaptive detection in compound-Gaussian clutter with random texture[J]. IEEE Signal Processing Letters, 2013, 20(6): 615-618. doi: 10.1109/LSP.2013.2259232 [21] Kong L J, Li N, Cui G L, et al.. Adaptive Bayesian detection for multiple-input multiple-output radar in compound-Gaussian clutter with random texture[J]. IET Radar, Sonar & Navigation, 2016, 10(4): 689-698. https://www.researchgate.net/publication/295257939_Adaptive_Bayesian_detection_for_multiple-input_multiple-output_radar_in_compound-Gaussian_clutter_with_random_texture [22] Balleri A, Nehorai A, and Wang J. Maximum likelihood estimation for compound-Gaussian clutter with inverse Gamma texture[J]. IEEE Transactions on Aerospace and Electronic Systems, 2007, 43(2): 775-780. doi: 10.1109/TAES.2007.4285370 [23] Bandiera F, Besson O, and Ricci G. Knowledge-aided covariance matrix estimation and adaptive detection in compound-Gaussian noise[J]. IEEE Transactions on Signal Processing, 2010, 58(10): 5391-5396. doi: 10.1109/TSP.2010.2052922 [24] Sangston K J, Gini F, and Greco M S. Coherent radar target detection in heavy-tailed compound-Gaussian clutter[J]. IEEE Transactions on Aerospace and Electronic Systems, 2012, 48(1): 64-77. doi: 10.1109/TAES.2012.6129621 [25] Ding H, Guan J, Liu N B, et al.. New spatial correlation models for sea clutter[J]. IEEE Geoscience and Remote Sensing Letters, 2015, 12(9): 1833-1837. doi: 10.1109/LGRS.2015.2430371 [26] Gini F and Farina A. Matched subspace CFAR detection of hovering helicopters[J]. IEEE Transactions on Aerospace and Electronic Systems, 1999, 35(4): 1293-1305. doi: 10.1109/7.805446 [27] Pulsone N B and Raghavan R S. Analysis of an adaptive CFAR detector in non-Gaussian interference[J]. IEEE Transactions on Aerospace and Electronic Systems, 1999, 35(3): 903-916. doi: 10.1109/7.784060 [28] Chan H C. Radar sea-clutter at low grazing angles[J]. IEE Proceedings-F, 1990, 137(2): 102-112. https://www.researchgate.net/publication/3361247_Radar_sea-clutter_at_low_grazing_angles -

 下载:
下载:



图(8)
计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

