
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
Modeling and Analysis of Multiple AEWs Coordinated Detection Radar System with Different Transmit Waveform
-
摘要: 多机协同探测雷达系统利用目标在不同机载雷达间的径向速度差异实现目标的有效检测,该系统已成为当前机载雷达领域的研究热点。该文首先建立了不同发射波形条件下多机协同探测雷达系统的信号模型,并给出了基于广义似然比(Generalized Likelihood Ratio Test, GLRT)准则的自适应检测器及其渐进统计分布特性,最后通过计算机仿真分析了3种特定发射波形下的运动目标检测性能。仿真结果表明多机协同探测雷达系统中发射波形的变化会严重影响雷达系统的运动目标检测性能,且相同发射波形的雷达系统对不同运动速度的目标检测性能也存在区别。
-
关键词:
- 多机协同探测雷达系统 /
- 发射波形 /
- 信号建模 /
- 目标检测
Abstract: Differences in target radial velocities of different airborne radar are used for target detection in a multiple Airborne Early Warnings (AEWs) coordinated detection radar system; this subject is currently a popular research topic. In this paper, a collaborative detection radar system model comprised of multiple AEWs with different transmit waveforms is constructed. The Generalized Likelihood Ratio Test (GLRT) based adaptive detector is then proposed and the approximated statistical characters of the detector are analyzed. Finally, the moving target detection performances of three selected transmit waveforms are analyzed by computer simulation; results show that the detection performance of the collaborative detection radar system is influenced by the transmit waveform, and that the detection performances of different velocity targets are different with the same transmit waveform. -

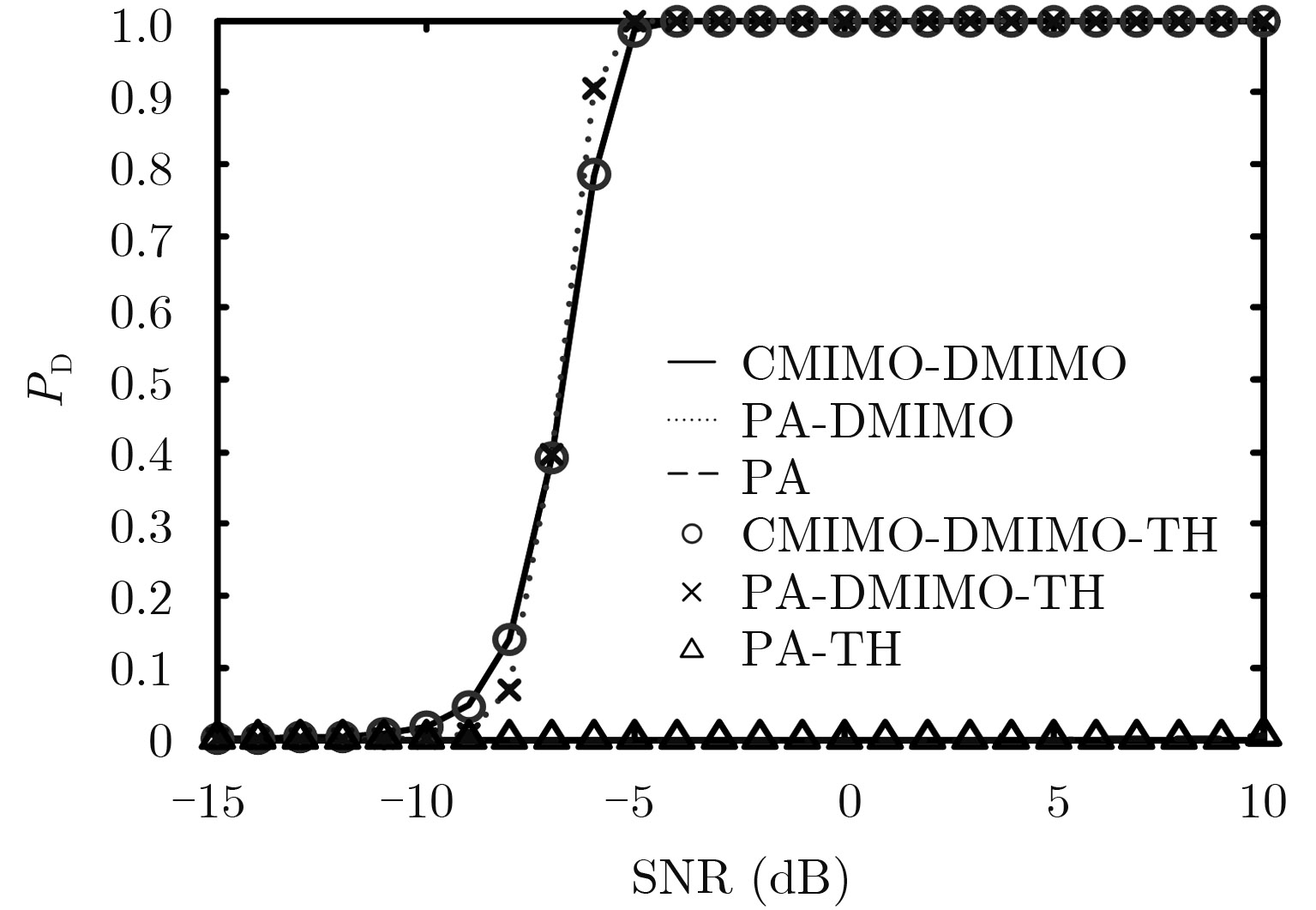
图 3 协方差矩阵已知且目标速度为(50, –100) m/s时的检测性能曲线
Figure 3. PD versus SNR for known covariance matrix with target velocity (50, –100) m/s

图 4 目标速度为(50, –100) m/s时的检测性能曲线
Figure 4. PD versus SNR with target velocity (50, –100) m/s

图 5 目标速度为(100, 100) m/s时的检测性能曲线
Figure 5. PD versus SNR with target velocity (100, 100) m/s

图 6 目标速度为(100, 60) m/s时的检测性能曲线
Figure 6. PD versus SNR with target velocity (100, 60) m/s

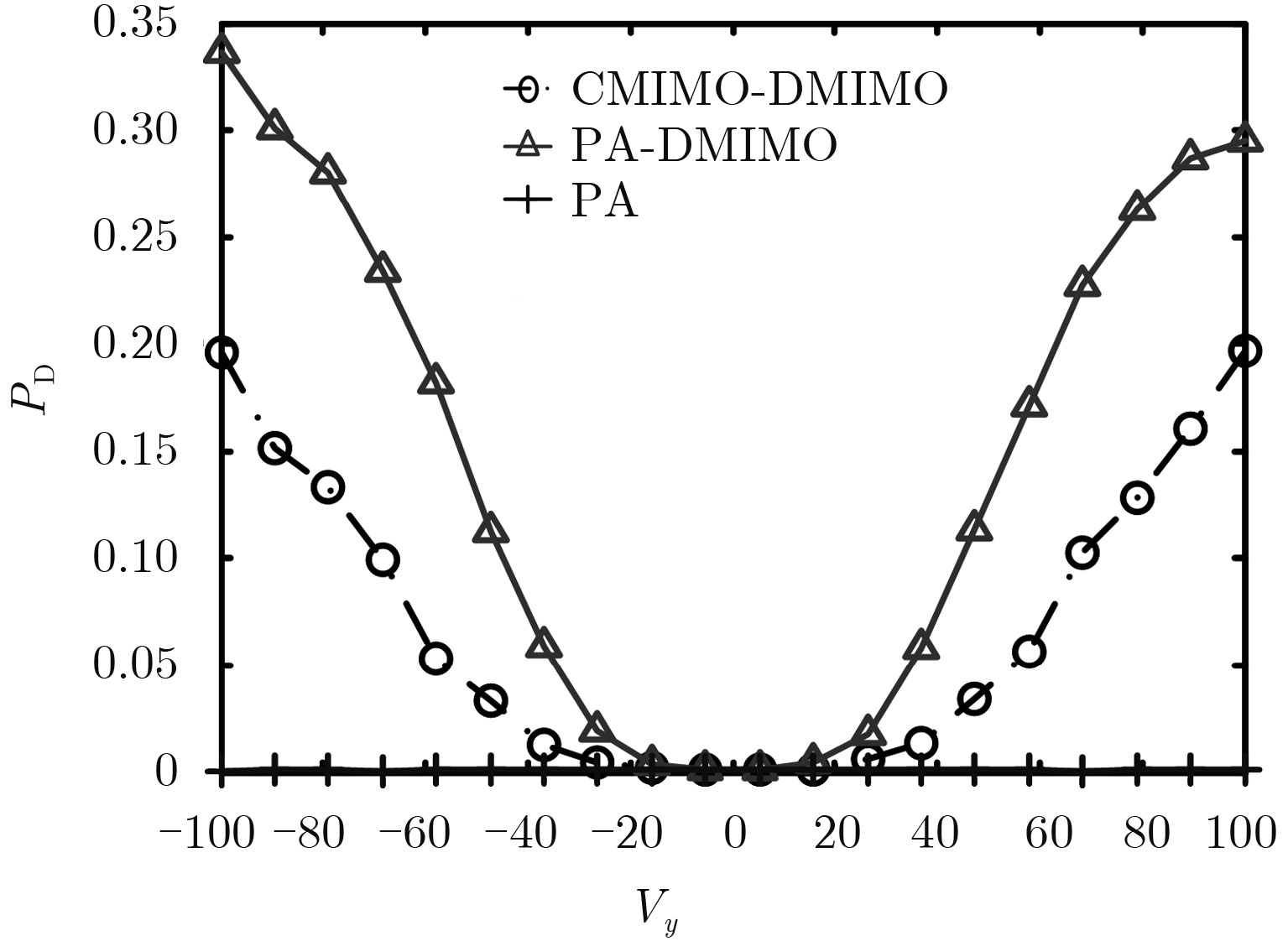
图 7 目标速度在x轴方向为零,检测概率与目标y轴速度变化的关系
Figure 7. Relationship between PD and the y-target velocity when the x-target velocity is 0 m/s

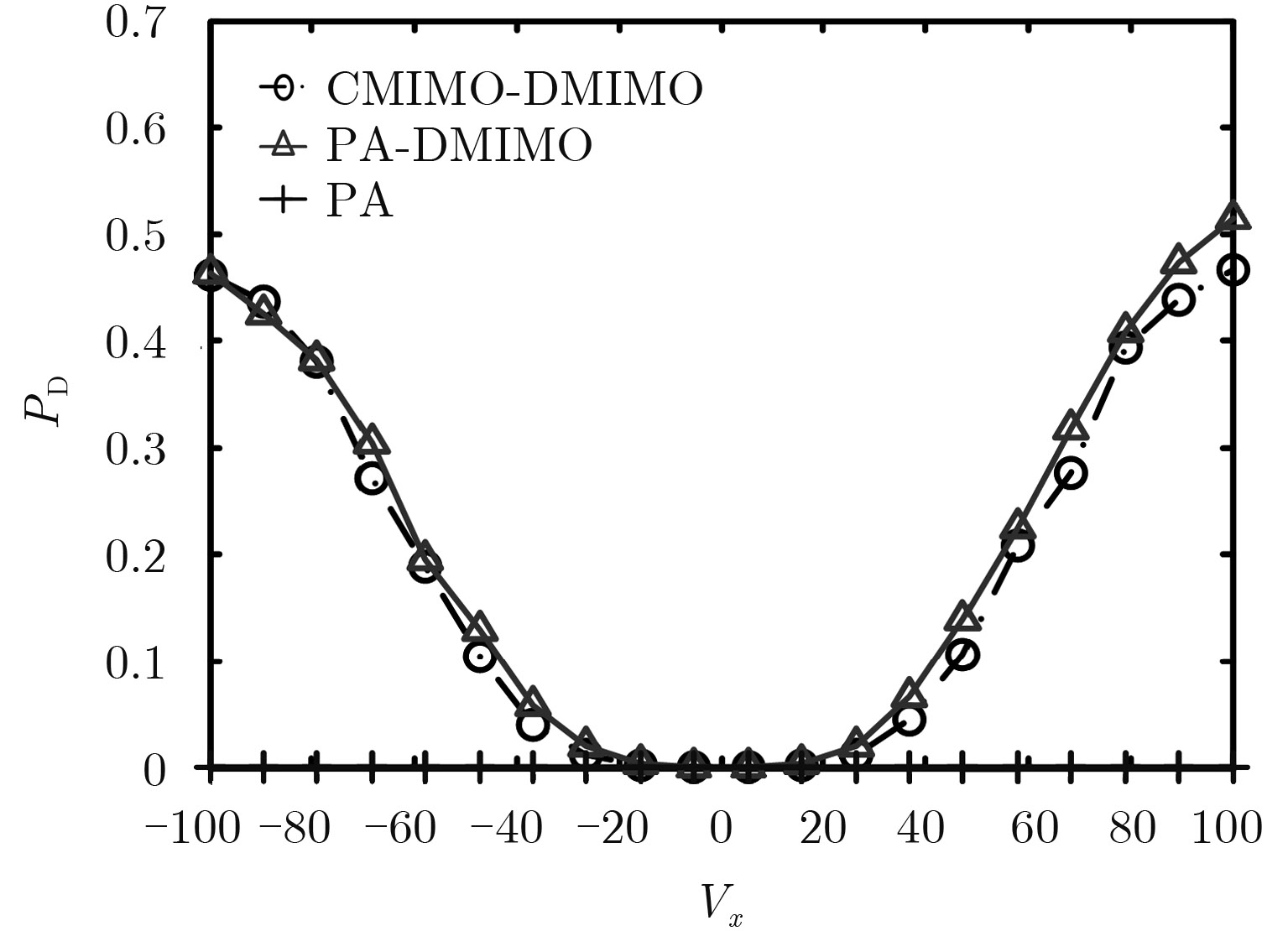
图 8 目标速度在y轴方向为零,检测概率与目标x轴速度变化的关系
Figure 8. Relationship between PD and the x-target velocity when the y-target velocity is 0 m/s
表 1 3种雷达体制下目标落入杂波区的情况
Table 1. Relationship between target and clutter of three radar systems with specific target velocity
雷达体制 目标速度(m/s) 路径 11 12 13 21 22 23 31 32 33 PA (50, –100) √ √ √ (100, 100) √ √ √ √ (100, 60) √ √ √ √ √ √ PA-DMIMO (50, –100) √ √ √ (100, 100) √ √ √ √ (100, 60) √ √ √ √ √ √ CMIMO-DMIMO (50, –100) √ (100, 100) (100, 60)  下载: 导出CSV
下载: 导出CSV
-
[1] Goodman N A and Bruyere D. Optimum and decentralized detection for multistatic airborne radar[J]. IEEE Transactions on Aerospace and Electronic Systems, 2007, 43(2): 806–813. doi: 10.1109/TAES.2007.4285374 [2] Bruyere D and Goodman N. Adaptive detection and diversity order in multistatic radar[J]. IEEE Transactions on Aerospace and Electronic Systems, 2008, 44(4): 1615–1623. doi: 10.1109/TAES.2008.4667736 [3] Jung B W, Adve R S, Chun J, et al.. Detection performance using frequency diversity with distributed sensors[J]. IEEE Transactions on Aerospace and Electronic Systems, 2011, 47(3): 1800–1813. doi: 10.1109/TAES.2011.5937266 [4] Willis N J. Bistatic Radar[M]. Mendham, NJ, USA: SciTech Publishing, 2005. [5] Chernyak V. Multisite radar systems composed of MIMO radars[J]. IEEE Aerospace and Electronic Systems Magazine, 2014, 29(12): 28–37. doi: 10.1109/MAES.2014.7015713 [6] Yang Haifeng, Liu Weijian, Xie Wenchong, et al.. General signal model of MIMO radar for moving target detection[J]. IET Radar, Sonar & Navigation, 2017, 11(4): 570–578. [7] Xu Haisheng, Wang Jian, Yuan Jian, et al.. Colocated MIMO radar transmit beamspace design for randomly present target detection[J]. IEEE Signal Processing Letters, 2015, 22(7): 828–832. doi: 10.1109/LSP.2014.2371241 [8] Tang Bo, Naghsh M M, and Tang Jun. Relative entropy-based waveform design for MIMO radar detection in the presence of clutter and interference[J]. IEEE Transactions on Signal Processing, 2015, 63(14): 3783–3796. doi: 10.1109/TSP.2015.2423257 [9] Jiu Bo, Liu Hongwei, Wang Xu, et al.. Knowledge-based spatial-temporal hierarchical MIMO radar waveform design method for target detection in heterogeneous clutter zone[J]. IEEE Transactions on Signal Processing, 2015, 63(3): 543–554. doi: 10.1109/TSP.2014.2366714 [10] 张西川, 谢文冲, 张永顺, 等. 任意波形相关性的机载MIMO雷达杂波建模与分析[J]. 电子与信息学报, 2011, 33(3): 646–651. http://www.cnki.com.cn/Article/CJFDTOTAL-DZYX201103025.htmZhang Xichuan, Xie Wenchong, Zhang Yongshun, et al.. Modeling and analysis of the clutter on airborne MIMO radar with arbitrary waveform correlation[J]. Journal of Electronics & Information Technology, 2011, 33(3): 646–651. http://www.cnki.com.cn/Article/CJFDTOTAL-DZYX201103025.htm [11] 张西川, 张永顺, 谢文冲, 等. 机载相干MIMO雷达杂波自由度估计研究[J]. 电子与信息学报, 2011, 33(9): 2125–2131. http://www.cnki.com.cn/Article/CJFDTOTAL-DZYX201109017.htmZhang Xichuan, Zhang Yongshun, Xie Wenchong, et al.. Research on the estimation of clutter rank for coherent airborne MIMO radar[J]. Journal of Electronics & Information Technology, 2011, 33(9): 2125–2131. http://www.cnki.com.cn/Article/CJFDTOTAL-DZYX201109017.htm [12] Xie Wenchong, Zhang Baihua, Wang Yongliang, et al.. Range ambiguity clutter suppression for bistatic STAP radar[J]. EURASIP Journal on Advances in Signal Processing, 2013, 2013: 75. doi: 10.1186/1687-6180-2013-75 [13] Xie Wenchong, Zhang Xichuan, Wang Yongliang, et al.. Estimation of clutter degrees of freedom for airborne multiple-input multiple-output-phased array radar[J]. IET Radar, Sonar & Navigation, 2013, 7(6): 652–657. [14] Xu Luzhou, Li Jian, and Stoica P. Target detection and parameter estimation for MIMO radar systems[J]. IEEE Transactions on Aerospace and Electronic Systems, 2008, 44(3): 927–939. doi: 10.1109/TAES.2008.4655353 [15] Liu Weijian, Wang Yongliang, Liu Jun, et al.. Adaptive detection without training data in colocated MIMO radar[J]. IEEE Transactions on Aerospace and Electronic Systems, 2015, 51(3): 2469–2479. doi: 10.1109/TAES.2015.130754 [16] Gao Yongchan, Liao Guisheng, and Liu Weijian. High-resolution radar detection in interference and nonhomogeneous noise[J]. IEEE Signal Processing Letters, 2016, 23(10): 1359–1363. doi: 10.1109/LSP.2016.2597738 [17] Liu Weijian, Liu Jun, Zhang Chen, et al.. Performance prediction of subspace-based adaptive detectors with signal mismatch[J]. Signal Processing, 2016, 123: 122–126. doi: 10.1016/j.sigpro.2015.12.021 [18] Xu Jia, Dai Xizeng, Xia Xianggen, et al.. Optimizations of multisite radar system with MIMO radars for target detection[J]. IEEE Transactions on Aerospace and Electronic Systems, 2011, 47(4): 2329–2343. doi: 10.1109/TAES.2011.6034636 [19] Ross S M. Introduction to Probability Models[M]. Fifth Edition, New York, USA: Academic Press, 2014. -






计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

