
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
Micro-motion Parameter Estimation in Non-Gaussian Noise via Mutual Correntropy
-
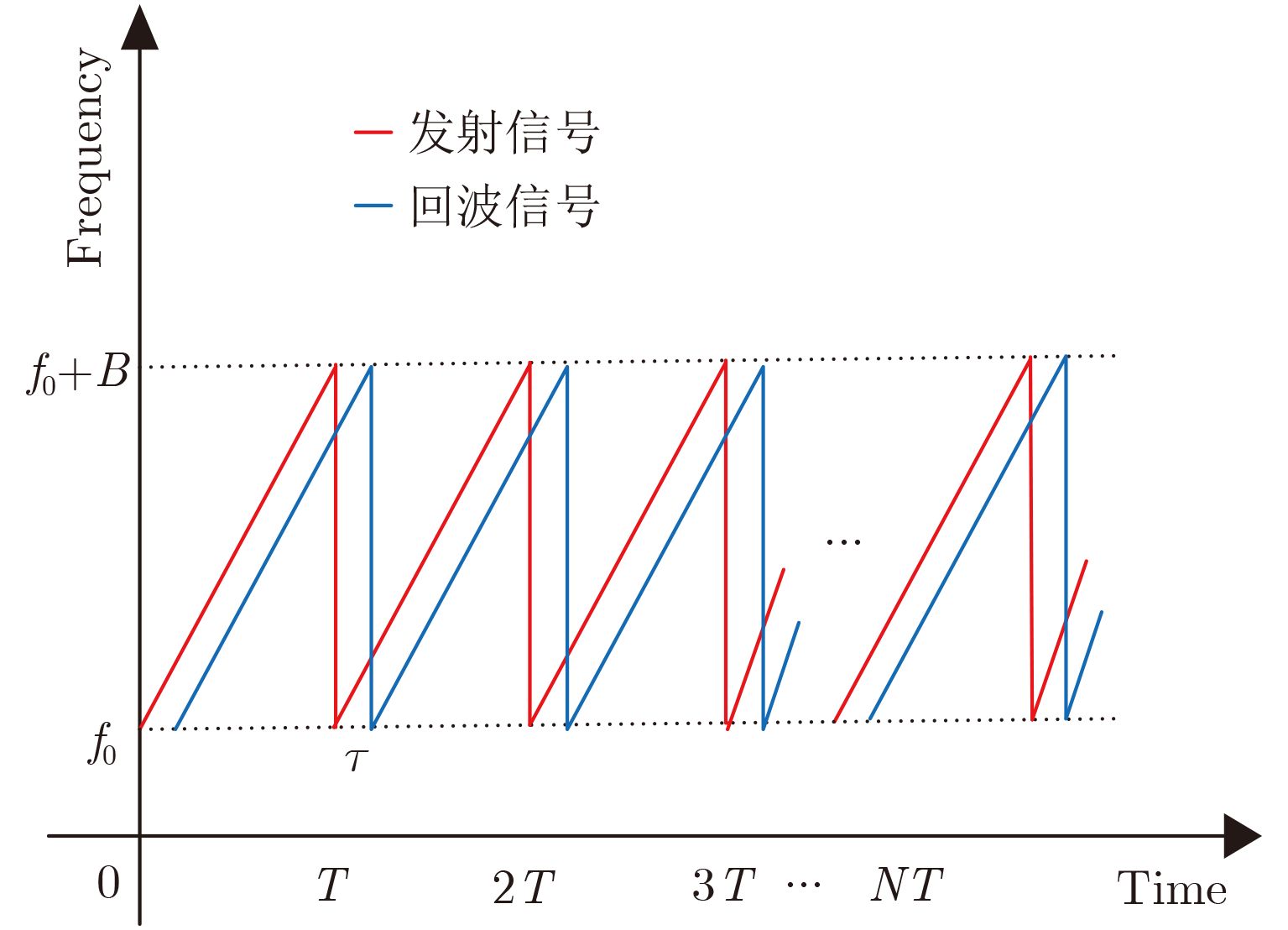
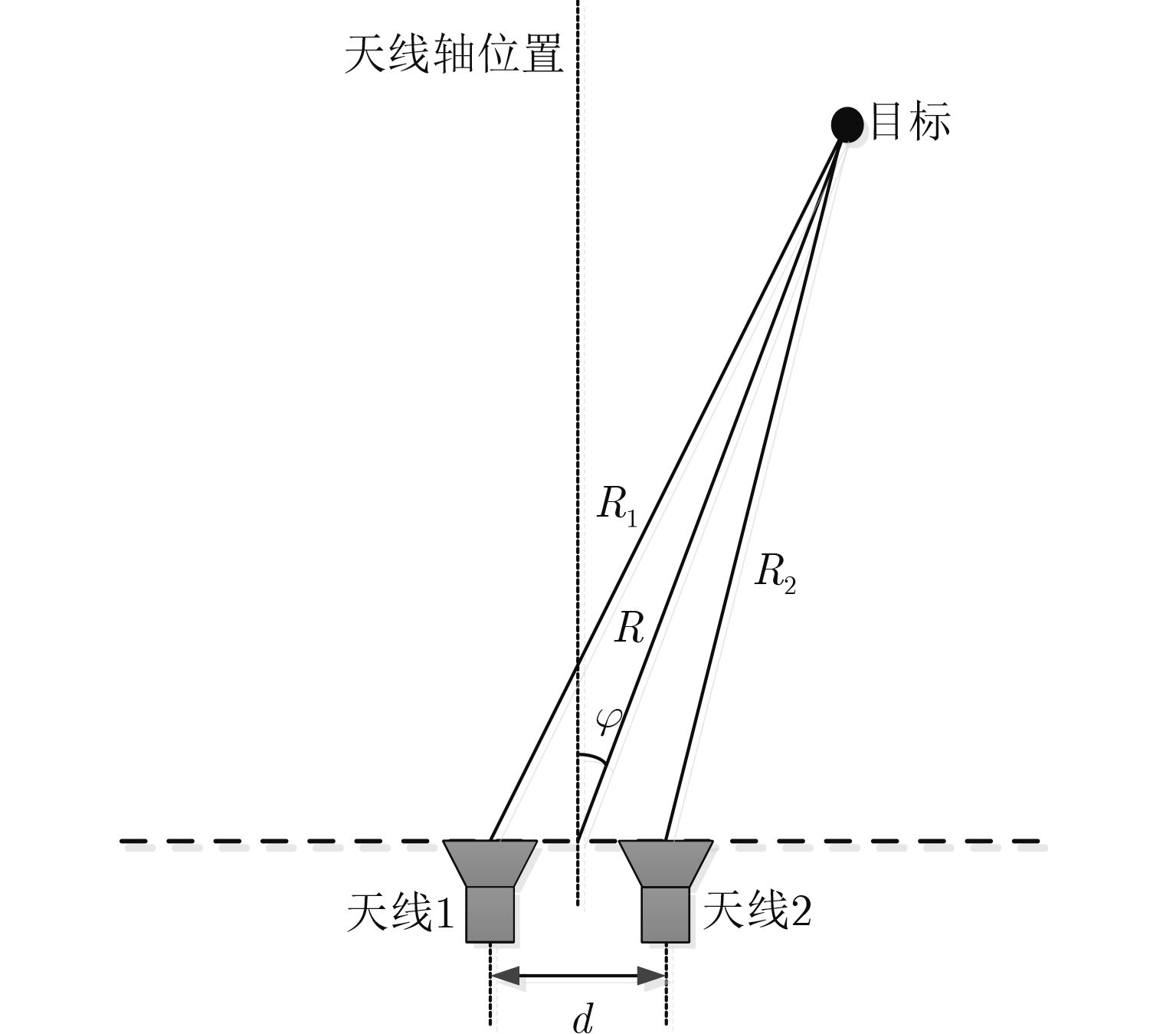
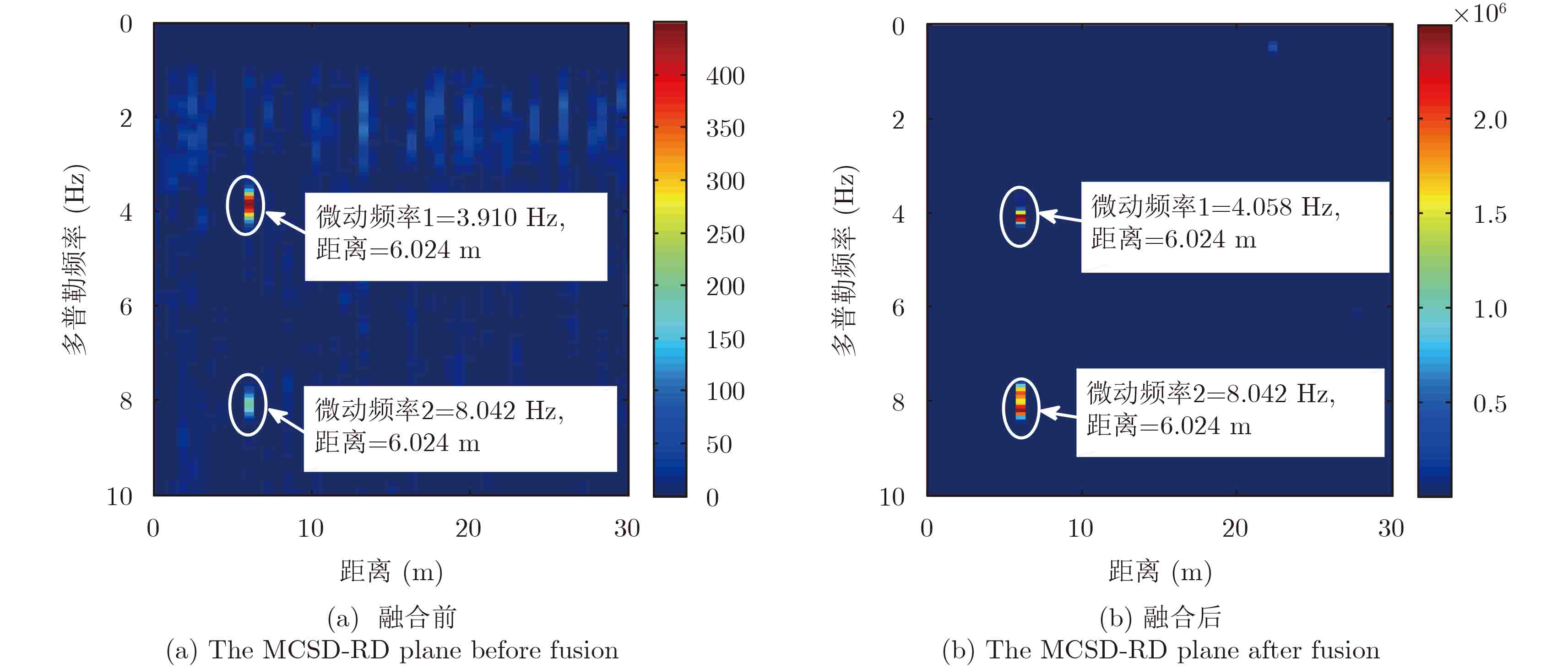
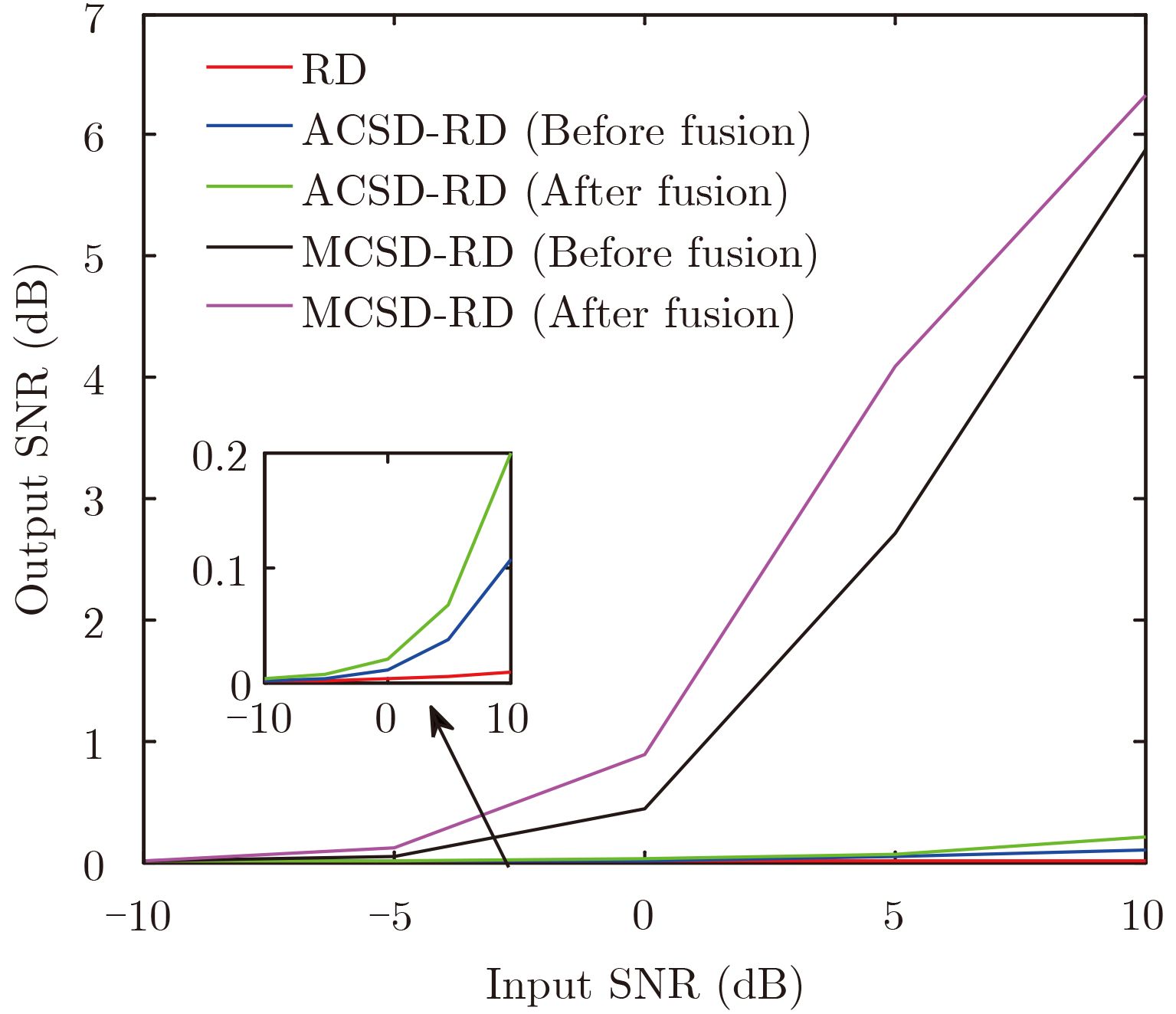
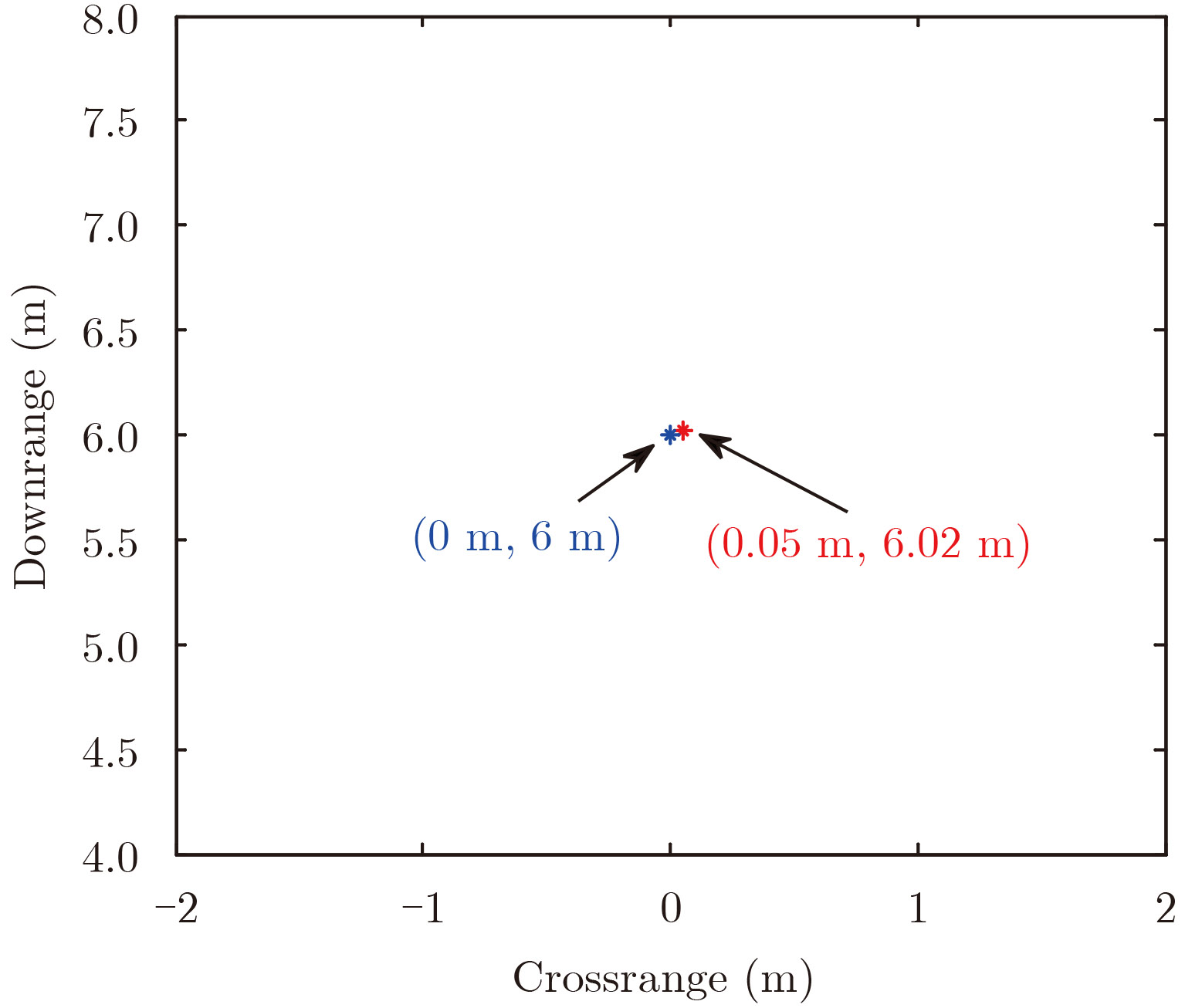
摘要: 针对非高斯背景下微动目标的参数估计问题,该文采用单发多收(SIMO)的线性调频连续波(LFMCW)雷达系统,提出了一种基于互相关熵的微动参数估计方法。该方法利用多通道回波信号的2阶和高阶信息,对回波中所含的目标信息实现更准确的量化,从而得到更好的微动参数估计效果。在非高斯背景下,相比传统傅里叶变换的方法,该方法能在微动目标的成像效果中实现更好的雷达成像效果以及更高的输出信噪比。同时,该文采用单脉冲比相(PCM)定位的方法,通过提取多通道回波的相位信息,计算不同通道间的相位差和目标的方位角,从而实现了对微动目标的准确定位。最后,仿真结果证明了该方法的有效性。Abstract: This study considered parameter estimations for micro-motion targets embedded in non-Gaussian noise with a Single Input Multiple Output (SIMO) radar. A novel estimation algorithm based on mutual correntropy was presented and used to derive the micro-perturbation parameters by exploiting the second and higher-order knowledge of the return signals among multiple channels. Compared with a conventional Fourier Transform (FT) method, the method proposed herein had a much higher Signal to Noise Ratio (SNR) gain. In addition, the location was derived by employing the Phase-Comparison Monopulse (PCM) technique. Finally, several numerical results were provided and discussed.
-
表 1 仿真参数
Table 1. Simulation parameters
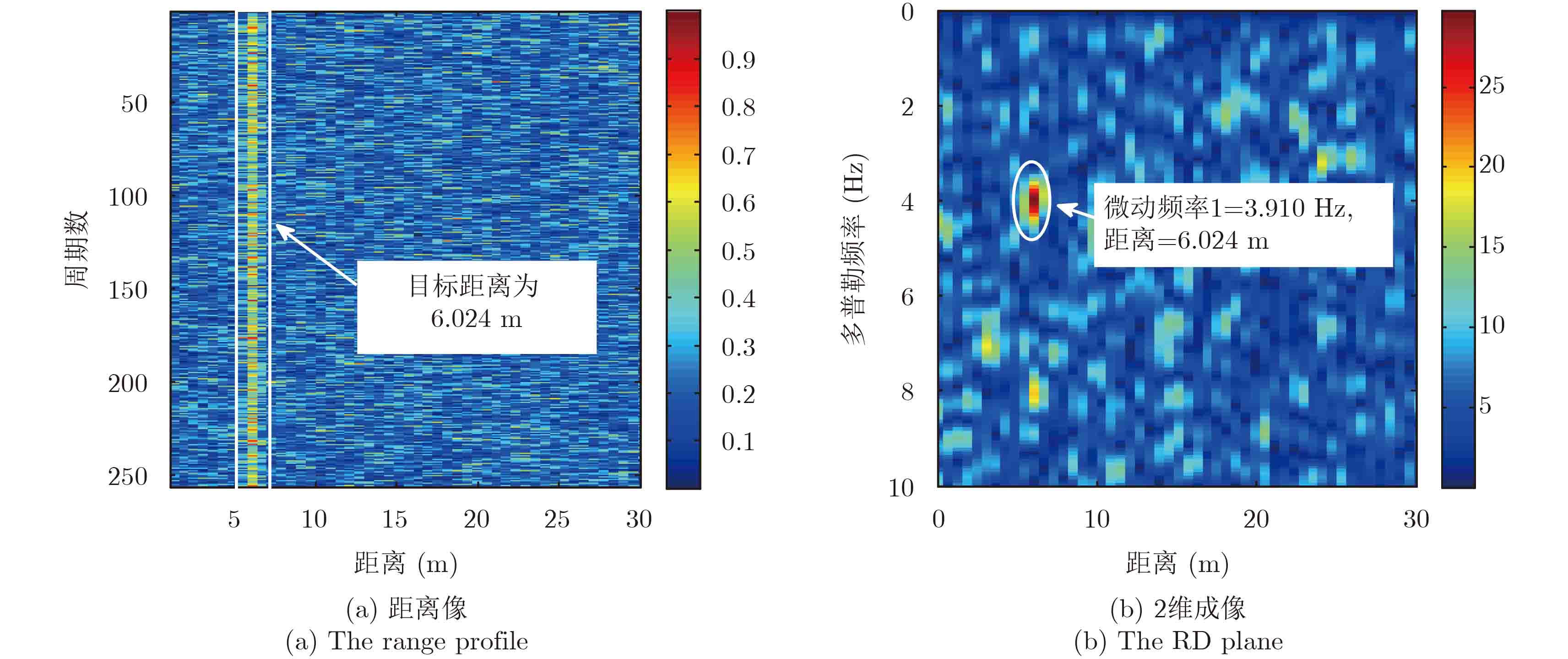
参数 探测参数 参数值 载波频率f0 1 GHz 信号带宽B 500 M 系统参数 信号时宽T 3.31 ms LFM周期数N 512 核尺度 $\sigma $ 0.2 目标参数 距离R 6 m 振动频率f1 4 Hz 振动频率f2 8 Hz 振动幅度A1 4 mm 振动幅度A2 4 mm 坐标(x, y) (0, 6) m 信噪比SNRin –10 dB 场景噪声参数 噪声类型 韦布尔噪声 韦布尔形状因子P 2  下载: 导出CSV
下载: 导出CSV
-
[1] Tahmoush Dave. Review of micro-Doppler signatures[J]. IET Radar, Sonar & Navigation, 2015, 9(9): 1140–1146. [2] Li Yan-bing, Du Lan, and Liu Hong-wei. Hierarchical classification of moving vehicles based on empirical mode decomposition of micro-Doppler signatures[J]. IEEE Transactions on Geoscience and Remote Sensing, 2013, 51(5): 3001–3013. doi: 10.1109/TGRS.2012.2216885 [3] Chen V C. The Micro-Doppler Effect in Radar[M]. London: Artech House, 2001: 157–159. [4] Chen V C, Li Fa-yin, Ho Shen-shyang, et al.. Micro-Doppler effect in radar: Phenomenon, model, and simulation study[J]. IEEE Transactions on Aerospace and Electronic Systems, 2006, 42(1): 2–21. doi: 10.1109/TAES.2006.1603402 [5] 胡程, 廖鑫, 向寅, 等. 一种生命探测雷达微多普勒测量灵敏度分析新方法[J]. 雷达学报, 2016, 5(5): 455–461. http://radars.ie.ac.cn/CN/abstract/abstract380.shtmlHu Cheng, Liao Xin, Xiang Yin, et al.. Novel analytic method for determining micro-Doppler measurement sensitivity in life-detection radar[J]. Journal of Radars, 2016, 5(5): 455–461. http://radars.ie.ac.cn/CN/abstract/abstract380.shtml [6] Zhang Wen-peng, Li Kang-le, and Jiang Wei-dong. Parameter estimation of radar targets with macro-motion and micro-motion based on circular correlation coefficients[J]. IEEE Signal Processing Letters, 2015, 22(5): 633–637. doi: 10.1109/LSP.2014.2365547 [7] Liu Jin, Ai Xiao-feng, Zhao Feng, et al.. Motion estimation of micro-motion targets with translational motion[C]. IET International Radar Conference, Hangzhou, China, 2015: 1–5. [8] Jia Yong, Kong Ling-jiang, Yang Xiao-bo, et al.. A novel method for detection of micro-motion target in image domain[C]. 2011 IEEE Radar Conference, Chengdu, China, 2011: 99–102. [9] Kong Ling-jiang and Principe Jose C. Life detection based on correntropy spectral density[C]. 2010 IEEE International Conference on Signal Processing, Beijing, China, 2011: 168–171. [10] Mahafza B, Elsherbeni A, 朱国富, 黄晓涛, 黎向阳, 等. 雷达系统设计MATLAB仿真[M]. 第1版, 北京: 电子工业出版社, 2009: 297–299.Mahafza B, Elsherbeni A, Zhu Guo-fu, Huang Xiao-tao, Li Xiang-yang, et al.. MATLAB Simulations for Radar Systems Design[M]. First edition, Beijing: Publishing House of Electronics Industry, 2009: 297–299. [11] Liu Wei-feng, Pokharel P P, and Principe Jose C. Correntropy: Properties and applications in non-Gaussian signal precessing[J]. IEEE Transactions on Signal Processing, 2007, 55(11): 5286–5298. doi: 10.1109/TSP.2007.896065 [12] Santamaria I, Pokharel P P, and Principe Jose C. Generalized correlation function: Definition, properties, and application to blind equalization[J]. IEEE Transactions on Signal Processing, 2006, 54(6): 2187–2197. doi: 10.1109/TSP.2006.872524 [13] Yamaguchi K, Saito M, Akiyama T, et al.. A 24 GHz band FM-CW radar system for detecting closed multiple targets with small displacement[C]. 2015 International Conference on Ubiquitous and Future Networks, Sapporo, Japan, 2015: 268–273. [14] Narumi K and Takayama J. Material discrimination and propagation time estimation for buried object based on cross correlation processing using microwave radar[C]. Annual Conference of the Society of Instrument and Control Engineers of Japan (SICE), Tsukuba, Japan, 2016: 1287–1292. [15] Molchanov Pavlo, Gupta Shalini, Kim Kihwan, et al.. Short-range FMCW monopulse radar for hand-gesture sensing[C]. 2015 IEEE Radar Conference, Arlington, VA, USA, 2015: 1491–1496. [16] 李青华, 孔令讲, 杨晓波. 基于SIRP法的相关韦布尔分布雷达杂波仿真[J]. 雷达科学与技术, 2011, 9(3): 253–258. http://www.cnki.com.cn/Article/CJFDTOTAL-LDKJ201103012.htmLi Qing-hua, Kong Ling-jiang, and Yang Xiao-bo. Simulation of correlated Weibull distribution radar clutter based on SIRP method[J]. Radar Science and Technology, 2011, 9(3): 253–258. http://www.cnki.com.cn/Article/CJFDTOTAL-LDKJ201103012.htm -




图(9) / 表(1)
计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

