
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
High-resolution Sparse Representation and Its Applications in Radar Moving Target Detection
-
摘要: 复杂背景下稳健高效的低可观测动目标检测始终是雷达信号处理领域的研究热点和难点,一方面,强杂波背景和目标复杂运动使得信号微弱,时频域难以区分;另一方面,相参积累算法复杂,长时间积累运算量较大,如何利用有限的雷达资源提高雷达探测性能成为亟需解决的问题。高分辨稀疏表示技术从信号稀疏性角度出发区分杂波和动目标,是传统变换域动目标检测技术的拓展,具有高时频分辨率、对噪声不敏感、稳健性高以及适于多分量信号分析的优势,有广阔应用前景。该文重点从应用角度进行归纳总结,系统回顾了雷达动目标检测的常规方法,然后对稀疏表示在雷达杂波特性分析、抑制、动目标检测、特征提取、时频分析等方面的应用进行了初步总结和归纳,对研究方向进行展望,最后结合实测数据和已有成果给出了部分处理结果。Abstract: To address difficulties in radar signal processing, the effective and efficient detection of low-observable moving targets in complex environments is an ongoing research hotspot. On the one hand, a signal may be extremely weak due to strong clutter and the complex motion of a target, making it hard to separate them in the time and frequency domains. On the other hand, complex coherent integration methods and the heavy computational burden of long-time integration represent challenges for improving radar detection performance with limited resources. High-resolution sparse representation can separate clutter from a moving target with respect to signal sparsity, and can be regarded as an extension of traditional transform-based moving target detection methods. This method has promising application prospects due to the advantages of its high time-frequency resolution, anti-noise property, robustness, and suitability for the analysis of multi-signals. In this paper, we systematically review conventional radar moving target detection methods. Then, we summarize their applications, including sparse representation in clutter property analysis, suppression, moving target detection, signature extraction, and time-frequency analysis. Next, we consider future developments. Finally, we provide some results based on real datasets and existing research.
-

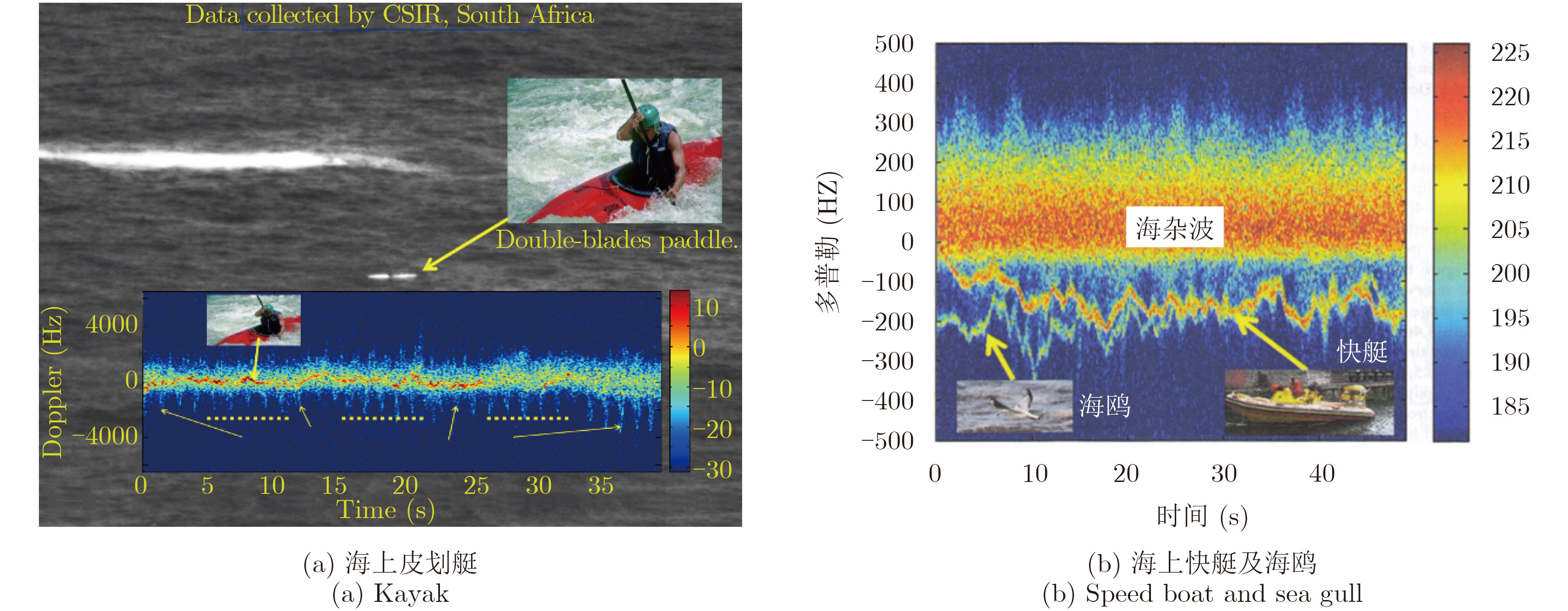
图 3 海上机动目标的距离和多普勒徙动(X波段CSIR雷达数据)
Figure 3. Range and Doppler migrations of marine maneuvering target (X-band CISR data)

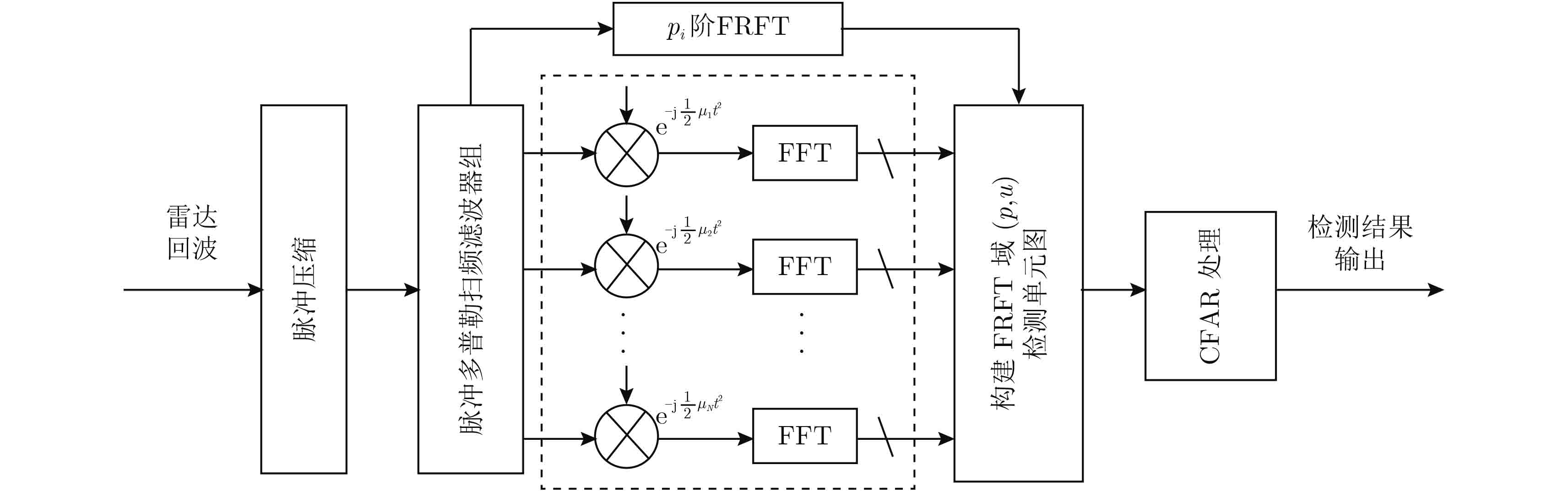
图 4 基于长时间相参积累的高速高机动目标检测方法
Figure 4. High-speed and maneuvering target detection based on long-time coherent integration



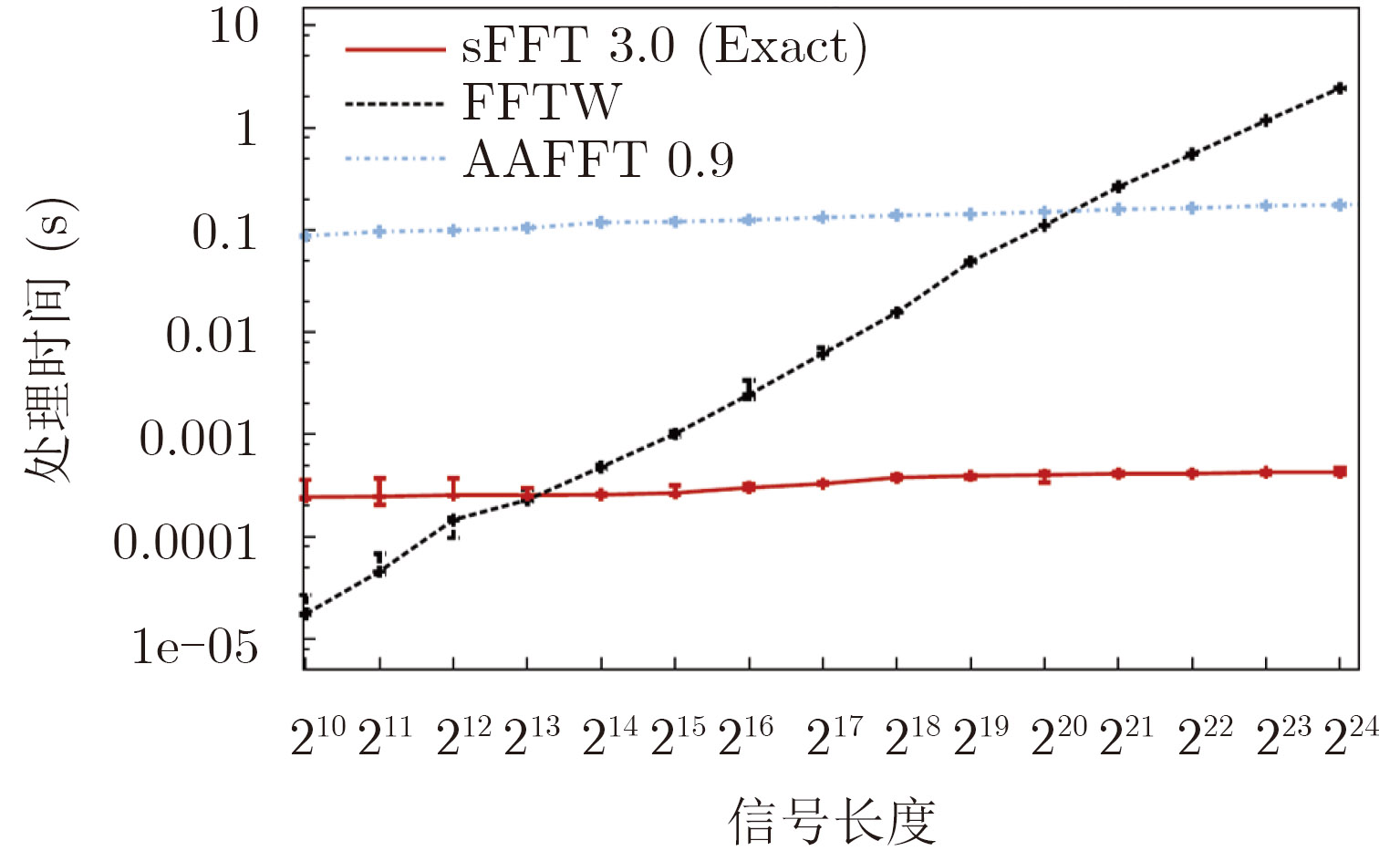
图 8 FFT与SFT的运算量对比分析(美国MIT实验室)
Figure 8. Comparison of computation cost between FFT and SFT (MIT Laboratory)

图 9 传统时频分析和稀疏时频分析技术的人体运动目标回波分析结果对比
Figure 9. Comparison of human movement analysis between traditional TFD and STFD

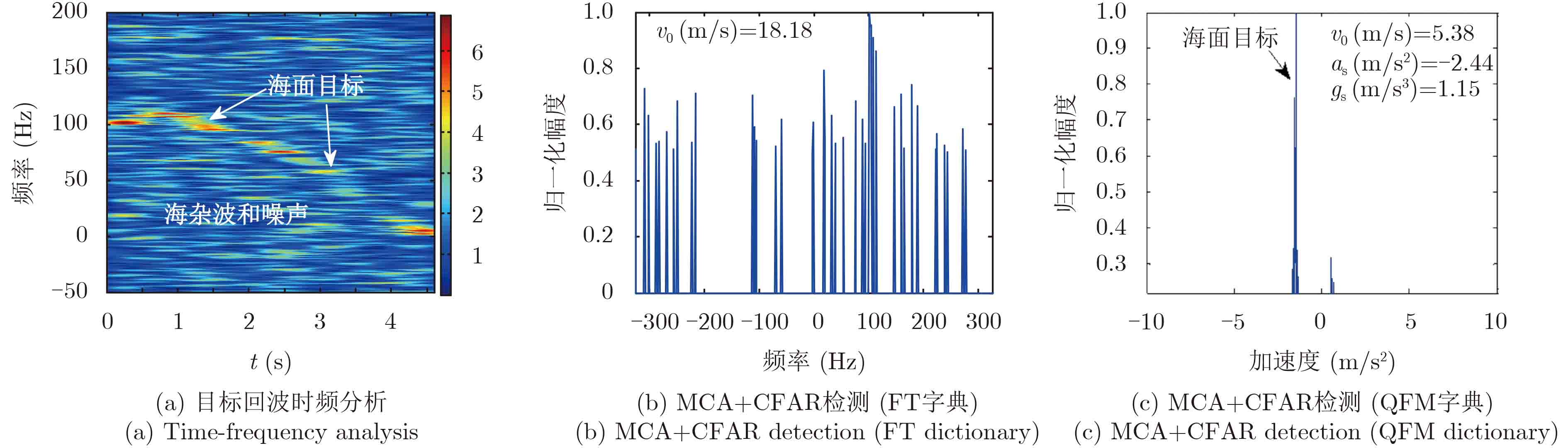
图 10 基于STFD的海上动目标检测结果对比(X波段CSIR雷达数据TFC17_006,切面图,Pfa=10–4)
Figure 10. Marine moving target detection comparisons via different STFDs (X-band CSIR datasets TFC17_006, slice plot, Pfa=10–4)
表 1 检测性能和计算时间对比(仿真机动目标+TFC17_006海杂波,采样点1024, Pfa=10–4)
Table 1. Comparison of detection performance and computational burden (Simulated moving target+TFC17_006 sea clutter, sampling number 1024, Pfa=10–4)
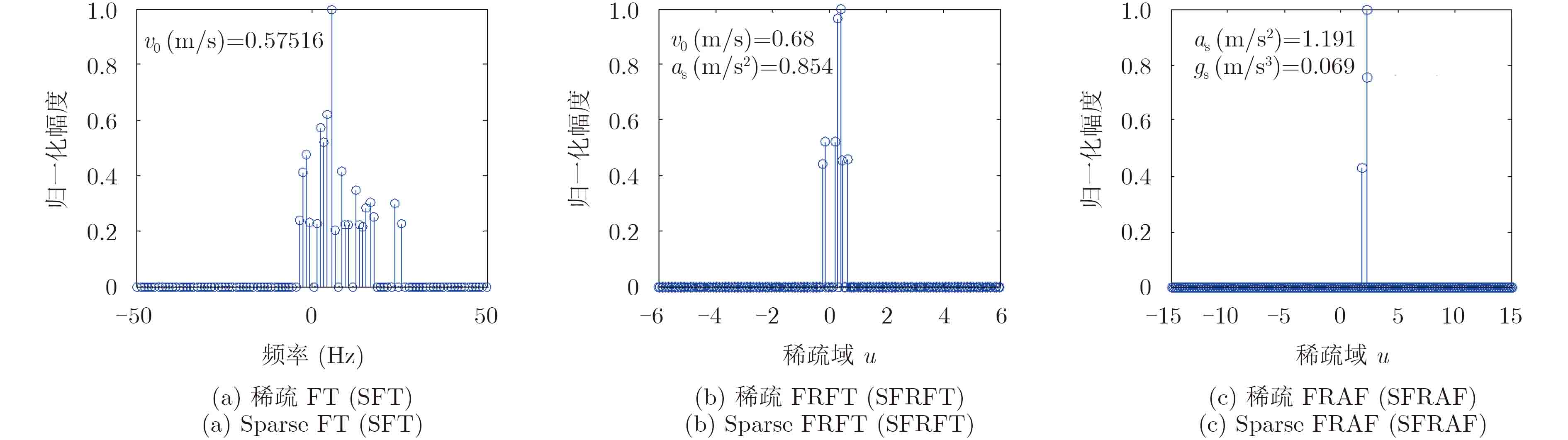
检测方法 MTD SFT FRFT SFRFT FRAF SFRAF 稀疏信号分量 – 13 – 10 – 2 Pd (SCR= –5 dB) 62.47% 68.35% 68.74% 70.21% 85.69% 89.35% 计算时间* (ms) 4.69 5.73 12.54 8.92 14.61 10.52 “*”:计算机配置:Intel Core i7-4790 3.6 GHz CPU; 16 G RAM; Matlab R2014a,计算时间为算法1次运算时间  下载: 导出CSV
下载: 导出CSV
-
[1] 杨建宇. 雷达技术发展规律和宏观趋势分析[J]. 雷达学报, 2012, 1(1): 19–27. http://radars.ie.ac.cn/CN/abstract/abstract5.shtmlYang Jian-yu. Development laws and macro trends analysis of radar technology[J]. Journal of Radars, 2012, 1(1): 19–27. http://radars.ie.ac.cn/CN/abstract/abstract5.shtml [2] 何友, 黄勇, 关键, 等. 海杂波中的雷达目标检测技术综述[J]. 现代雷达, 2014, 36(12): 1–9. doi: 10.3969/j.issn.1004-7859.2014.12.001He You, Huang Yong, Guan Jian, et al.. An overview on radar target detection in sea clutter[J]. Modern Radar, 2014, 36(12): 1–9. doi: 10.3969/j.issn.1004-7859.2014.12.001 [3] 陈小龙, 关键, 何友. 微多普勒理论在海面目标检测中的应用及展望[J]. 雷达学报, 2013, 2(1): 123–134. http://radars.ie.ac.cn/CN/abstract/abstract68.shtmlChen Xiao-long, Guan Jian, and He You. Applications and prospect of micro-motion theory in the detection of sea surface target[J]. Journal of Radars, 2013, 2(1): 123–134. http://radars.ie.ac.cn/CN/abstract/abstract68.shtml [4] Zuo Lei, Li Ming, Zhang Xiao-wei, et al.. An efficient method for detecting slow-moving weak targets in sea clutter based on time-frequency iteration decomposition[J]. IEEE Transactions on Geoscience and Remote Sensing, 2013, 51(6): 3659–3672. doi: 10.1109/TGRS.2012.2224665 [5] 许稼, 彭应宁, 夏香根, 等. 空时频检测前聚焦雷达信号处理方法[J]. 雷达学报, 2014, 3(2): 129–141. http://radars.ie.ac.cn/CN/abstract/abstract165.shtmlXu Jia, Peng Ying-ning, Xia Xiang-gen, et al.. Radar signal processing method of space-time-frequency focus-before-detects[J]. Journal of Radars, 2014, 3(2): 129–141. http://radars.ie.ac.cn/CN/abstract/abstract165.shtml [6] 陈小龙, 关键, 黄勇, 等. 分数阶傅里叶变换在动目标检测和识别中的应用: 回顾和展望[J]. 信号处理, 2013, 29(1): 85–97. http://www.cnki.com.cn/Article/CJFDTOTAL-XXCN201301013.htmChen Xiao-long, Guan Jian, Huang Yong, et al.. Application of fractional Fourier transform in moving target detection and recognition: Development and prospect[J]. Journal of Signal Processing, 2013, 29(1): 85–97. http://www.cnki.com.cn/Article/CJFDTOTAL-XXCN201301013.htm [7] Donoho David L. Compressed sensing[J]. IEEE Transactions on Information Theory, 2006, 52(4): 1289–1306. doi: 10.1109/TIT.2006.871582 [8] 李刚, 夏向根. 参数化稀疏表征在雷达探测中的应用[J]. 雷达学报, 2016, 5(1): 1–7. http://radars.ie.ac.cn/CN/abstract/abstract323.shtmlLi Gang and Xia Xiang-gen. Parametric sparse representation and its applications to radar sensing[J]. Journal of Radars, 2016, 5(1): 1–7. http://radars.ie.ac.cn/CN/abstract/abstract323.shtml [9] 焦李成, 杨淑媛, 刘芳, 等. 压缩感知回顾与展望[J]. 电子学报, 2011, 39(7): 1651–1662. http://www.cnki.com.cn/Article/CJFDTOTAL-DZXU201107030.htmJiao Licheng, Yang Shuyuan, Liu Fang, et al.. Development and prospect of compressive sensing[J]. Acta Electronic Sinica, 2011, 39(7): 1651–1662. http://www.cnki.com.cn/Article/CJFDTOTAL-DZXU201107030.htm [10] 宋杰, 何友, 关键. 一种双模杂波抑制的准自适应MTI系统[J]. 兵工学报, 2009, 30(5): 546–550. http://www.cnki.com.cn/Article/CJFDTOTAL-BIGO200905008.htmSong Jie, He You, and Guan Jian. A near adaptive MTI system for bimodal clutter suppression[J]. Acta Armamentarii, 2009, 30(5): 546–550. http://www.cnki.com.cn/Article/CJFDTOTAL-BIGO200905008.htm [11] 马晓岩, 袁俊泉. 基于离散小波变换提高MTD检测性能的仿真分析[J]. 信号处理, 2001, 17(2): 148–151. http://www.cnki.com.cn/Article/CJFDTOTAL-XXCN200102009.htmMa Xiao-yan and Yuan Jun-quan. Simulation analysis for MTD detectability improvement using the discrete wavelet transform (DWT)[J]. Journal of Signal Processing, 2001, 17(2): 148–151. http://www.cnki.com.cn/Article/CJFDTOTAL-XXCN200102009.htm [12] Guan Jian, Chen Xiao-long, et al.. Adaptive fractional Fourier transform-based detection algorithm for moving target in heavy sea clutter[J]. IET Radar, Sonar & Navigation, 2012, 6(5): 389–401. doi: 10.1049/iet-rsn.2011.0030 [13] Chen Xiao-long, Guan Jian, Liu Ning-bo, et al.. Maneuvering target detection via Radon-fractional Fourier transform-based long-time coherent integration[J]. IEEE Transaction on Signal Processing, 2014, 62(4): 939–953. doi: 10.1109/TSP.2013.2297682 [14] 庞存锁. 基于离散多项式相位变换和分数阶傅里叶变换的加速目标检测算法[J]. 电子学报, 2012, 40(1): 184–188. http://www.cnki.com.cn/Article/CJFDTOTAL-DZXU201201031.htmPang Cun-suo. An accelerating target detection algorithm based on DPT and fractional Fourier transform[J]. Acta Electronic Sinica, 2012, 40(1): 184–188. http://www.cnki.com.cn/Article/CJFDTOTAL-DZXU201201031.htm [15] Yonina C Eldar, Pavel Sidorenko, Dustin G Mixon, et al.. Sparse phase retrieval from short-time Fourier measurements[J]. IEEE Signal Processing Letters, 2015, 22(5): 638–642. doi: 10.1109/LSP.2014.2364225 [16] Saad Qazi, Apostolos Georgakis, Lampros K Stergioulas, et al.. Interference suppression in the Wigner distribution using fractional Fourier transformation and signal synthesis[J]. IEEE Transactions on Signal Processing, 2007, 55(6): 3150–3154. doi: 10.1109/TSP.2007.893971 [17] Barbarossa S. Analysis of multicomponent LFM signals by a combined Wigner-Hough transform[J]. IEEE Transactions on Signal Processing, 1995, 43(6): 1511–1515. doi: 10.1109/78.388866 [18] Jérôme Gilles. Empirical wavelet transform[J]. IEEE Transactions on Signal Processing, 2013, 61(16): 3999–4010. doi: 10.1109/TSP.2013.2265222 [19] 陶然, 邓兵, 王越. 分数阶傅里叶变换及其应用[M]. 北京: 清华大学出版社, 2009.Tao Ran, Deng Bing, and Wang Yue. Fractional Fourier Transform and Its Applications[M]. Beijing: Tsinghua University Press, 2009. [20] Feng Qiang and Li Bing-zhao. Convolution and correlation theorems for the two-dimensional linear canonical transform and its applications[J]. IET Signal Processing, 2016, 10(2): 125–132. doi: 10.1049/iet-spr.2015.0028 [21] Liu Sheng-heng, Shan Tao, Tao Ran, et al.. Sparse discrete fractional Fourier transform and its applications[J]. IEEE Transactions on Signal Processing, 2014, 62(24): 6582–6595. doi: 10.1109/TSP.2014.2366719 [22] Tao Ran, Li Xue-mei, Li Yan-lei, et al.. Time-delay estimation of chirp signals in the fractional Fourier domain[J]. IEEE Transactions on Signal Processing, 2009, 57(7): 2852–2855. doi: 10.1109/TSP.2009.2020028 [23] Tao Ran, Zhang Feng, and Wang Yue. Fractional power spectrum[J]. IEEE Transactions on Signal Processing, 2008, 56(9): 4199–4206. doi: 10.1109/TSP.2008.925579 [24] Tao Ran, Li Yan-lei, and Wang Yue. Short-time fractional Fourier transform and its applications[J]. IEEE Transactions on Signal Processing, 2010, 58(5): 2568–2580. doi: 10.1109/TSP.2009.2028095 [25] 沙学军, 史军, 张钦宇, 等. 分数傅里叶变换原理及其在通信系统中的应用[M]. 北京: 人民邮电出版社, 2013.Sha Xue-jun, Shi Jun, Zhang Qin-yu, et al.. Fractional Fourier Transform Theory and Its Applications in Communication Systems[M]. Beijing: Post & Telecom Press, 2013. [26] Liu Xiao-ping, Shi Jun, Xiang Wei, et al.. Sampling expansion for irregularly sampled signals in fractional Fourier transform domain[J]. Digital Signal Processing, 2014, 34: 74–81. doi: 10.1016/j.dsp.2014.08.004 [27] Shi Jun, Xiang Wei, Liu Xiaoping, et al.. A sampling theorem for the fractional Fourier transform without band-limiting constraints[J]. Signal Processing, 2014, 98: 158–165. doi: 10.1016/j.sigpro.2013.11.026 [28] Chen Xiao-long, Guan Jian, Bao Zhong-hua, et al.. Detection and extraction of target with micro-motion in spiky sea clutter via short-time fractional Fourier transform[J]. IEEE Transactions on Geoscience and Remote Sensing, 2014, 52(2): 1002–1018. doi: 10.1109/TGRS.2013.2246574 [29] Xing Meng-dao, Su Jun-hai, Wang Gen-yuan, et al.. New parameter estimation and detection algorithm for high speed small target[J]. IEEE Transactions on Aerospace and Electronic Systems, 2011, 47(1): 214–224. doi: 10.1109/TAES.2011.5705671 [30] 吴孙勇, 廖桂生, 朱圣棋, 等. 提高雷达机动目标检测性能的二维频率域匹配方法[J]. 电子学报, 2012, 40(12): 2415–2420. http://www.cnki.com.cn/Article/CJFDTOTAL-DZXU201212010.htmWu Sun-yong, Liao Gui-sheng, Zhu Sheng-qi, et al.. A new method for radar maneuvering target detection based on matched filtering in two-dimensional frequency domain[J]. Acta Electronica Sinica, 2012, 40(12): 2415–2420. http://www.cnki.com.cn/Article/CJFDTOTAL-DZXU201212010.htm [31] Carlson B D, Evans E D, and Wilson S L. Search radar detection and track with the Hough transform. I. system concept[J]. IEEE Transactions on Aerospace and Electronic Systems, 1994, 30(1): 102–108. doi: 10.1109/7.250410 [32] Yu Ji, Xu Jia, Peng Ying-ning, et al.. Radon-Fourier transform for radar target detection (III): Optimality and fast implementations[J]. IEEE Transactions on Aerospace and Electronic Systems, 2012, 48(2): 991–1004. doi: 10.1109/TAES.2012.6178044 [33] Tao Ran, Zhang Nan, and Wang Yue. Analysing and compensating the effects of range and Doppler frequency migrations in linear frequency modulation pulse compression radar[J]. IET Radar, Sonar & Navigation, 2011, 5(1): 12–22. doi: 10.1049/iet-rsn.2009.0265 [34] De Wind H J, Cilliers J E, and Herselman P L. Dataware: Sea clutter and small boat radar reflectivity databases[J]. IEEE Signal Processing Magazine, 2010, 27(2): 145–148. doi: 10.1109/MSP.2009.935415 [35] Chen Xiao-long, Guan Jian, Liu Ning-bo, et al.. Detection of a low observable sea-surface target with micromotion via the Radon-linear canonical transform[J]. IEEE Geoscience and Remote Sensing Letters, 2014, 11(7): 1225–1229. doi: 10.1109/LGRS.2013.2290024 [36] Kong Ling-jiang, Li Xiao-long, Cui Guo-long, et al.. Coherent integration algorithm for a maneuvering target with high-order range migration[J]. IEEE Transactions on Signal Processing, 2015, 63(17): 4474–4486. doi: 10.1109/TSP.2015.2437844 [37] Li Xiao-long, Cui Guo-long, Yi Wei, et al.. A fast maneuvering target motion parameters estimation algorithm based on ACCF[J]. IEEE Signal Processing Letters, 2015, 22(3): 265–269. doi: 10.1109/LSP.2014.2357681 [38] Xu Jia, Xia Xiang-gen, Peng Shi-bao, et al.. Radar maneuvering target motion estimation based on generalized Radon-Fourier transform[J]. IEEE Transactions on Signal Processing, 2012, 60(12): 6190–6201. doi: 10.1109/TSP.2012.2217137 [39] Chen Xiao-long, Huang Yong, Liu Ning-bo, et al.. Radon-fractional ambiguity function-based detection method of low-observable maneuvering target[J]. IEEE Transactions on Aerospace and Electronic Systems, 2015, 51(2): 815–833. doi: 10.1109/TAES.2014.130791 [40] Chen Xiao-long, Guan Jian, Huang Yong, et al.. Radon-linear canonical ambiguity function-based detection and estimation method for marine target with micromotion[J]. IEEE Transactions on Geoscience and Remote Sensing, 2015, 53(4): 2225–2240. doi: 10.1109/TGRS.2014.2358456 [41] Chen Xiao-long, Guan Jian, Li Xiu-you, et al.. Effective coherent integration method for marine target with micromotion via phase differentiation and Radon-Lv’s distribution[J]. IET Radar, Sonar & Navigation (Special Issue: Micro-Doppler), 2015, 9(9): 1284–1295. doi: 10.1049/iet-rsn.2015.0100 [42] 陈小龙, 关键, 董云龙, 等. 稀疏域海杂波抑制与微动目标检测方法[J]. 电子学报, 2016, 44(4): 860–867. http://www.cnki.com.cn/Article/CJFDTOTAL-DZXU201604015.htmChen Xiao-long, Guan Jian, Dong Yun-long, et al.. Sea clutter suppression and micromotion target detection in sparse domain[J]. Acta Electronica Sinica, 2016, 44(4): 860–867. http://www.cnki.com.cn/Article/CJFDTOTAL-DZXU201604015.htm [43] Faruk Uysal, Ivan Selesnick, Unnikrishna Pillai, et al.. Dynamic clutter mitigation using sparse optimization[J]. IEEE Aerospace and Electronic Systems Magazine, 2014, 29(7): 37–49. doi: 10.1109/MAES.2014.130137 [44] Xu Jin, Wang Wei, Gao Jing-huai, et al.. Monochromatic noise removal via sparsity-enabled signal decomposition method[J]. IEEE Geoscience and Remote Sensing Letters, 2013, 10(3): 533–537. doi: 10.1109/LGRS.2012.2212271 [45] 罗倩. 基于稀疏表示的杂波建模和微弱运动目标探测[J]. 现代雷达, 2016, 38(2): 43–46. http://www.cnki.com.cn/Article/CJFDTOTAL-XDLD201602013.htmLuo Qian. Small moving target detection using sparse clutter modeling[J]. Modern Radar, 2016, 38(2): 43–46. http://www.cnki.com.cn/Article/CJFDTOTAL-XDLD201602013.htm [46] Gilbert A, Guha S, Indyk P, et al.. Near-optimal sparse Fourier representations via sampling[C]. Proceedings of the 34th ACM Symposium on Theory of Computing, New York, 2002: 152–161. [47] Yang Zhao-cheng, Li Xiang, Wang Hong-qiang, et al.. On clutter sparsity analysis in space-time adaptive processing airborne radar[J]. IEEE Geoscience and Remote Sensing Letters, 2013, 10(5): 1214–1218. doi: 10.1109/LGRS.2012.2236639 [48] Laura Anitori, Arian Maleki, Matern Otten, et al.. Design and analysis of compressed sensing radar detectors[J]. IEEE Transactions on Signal Processing, 2013, 61(4): 813–827. doi: 10.1109/TSP.2012.2225057 [49] Marco F Duarte and Yonina C Eldar. Structured compressed sensing: From theory to applications[J]. IEEE Transactions on Signal Processing, 2011, 59(9): 4053–4085. doi: 10.1109/TSP.2011.2161982 [50] Yang Jun-gang, Thompson John, Huang Xiao-tao, et al.. Random-frequency SAR imaging based on compressed sensing[J]. IEEE Transactions on Geoscience and Remote Sensing, 2013, 51(2): 983–994. doi: 10.1109/TGRS.2012.2204891 [51] 方明, 戴奉周, 刘宏伟, 等. 基于联合稀疏恢复的宽带雷达动目标检测方法[J]. 电子与信息学报, 2015, 37(12): 2977–2983. http://www.cnki.com.cn/Article/CJFDTOTAL-DZYX201512027.htmFang Ming, Dai Feng-zhou, Liu Hong-wei, et al.. Detection of moving targets for wideband radar based on joint-sparse recovery[J]. Journal of Electronics & Information Technology, 2015, 37(12): 2977–2983. http://www.cnki.com.cn/Article/CJFDTOTAL-DZYX201512027.htm [52] 朱厦, 李彦鹏, 黎湘, 等. 基于信号稀疏表示的Chirp信号参数估计方法[J]. 现代雷达, 2008, 30(4): 59–63. http://www.cnki.com.cn/Article/CJFDTOTAL-XDLD200804017.htmZhu Xia, Li Yan-peng, Li Xiang, et al.. A new method for parameter estimation of chirp signal based on sparse signal representation[J]. Modern Radar, 2008, 30(4): 59–63. http://www.cnki.com.cn/Article/CJFDTOTAL-XDLD200804017.htm [53] 余付平, 冯有前, 高大化, 等. 基于稀疏分解的雷达信号抗噪声干扰方法研究[J]. 系统工程与电子技术, 2011, 33(8): 1765–1769. http://www.cnki.com.cn/Article/CJFDTOTAL-XTYD201108019.htmYu Fu-ping, Feng You-qian, Gao Da-hua, et al.. Research on anti-noise jamming of radar signals based on sparse decomposition[J]. Systems Engineering and Electronics, 2011, 33(8): 1765–1769. http://www.cnki.com.cn/Article/CJFDTOTAL-XTYD201108019.htm [54] Victor C Chen, Fayin Li, Shen-Shyang Ho, et al.. Micro-Doppler effect in radar: Phenomenon, model, and simulation study[J]. IEEE Transactions on Aerospace and Electronic Systems, 2006, 42(1): 2–21. doi: 10.1109/TAES.2006.1603402 [55] Victor C Chen, David Tahmoush, and William J Miceli. Radar Micro-Doppler Signature: Processing and Applications[M]. UK: IET, 2014. [56] Li Gang and Pramod K Varshney. Micro-Doppler parameter estimation via parametric sparse representation and pruned orthogonal matching pursuit[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2014, 7(12): 1939–1404. [57] Zhu Sheng-qi, Liao Gui-sheng, Qu Yi, et al.. Ground moving targets imaging algorithm for synthetic aperture radar[J]. IEEE Transactions on Geoscience and Remote Sensing, 2011, 49(1): 462–477. doi: 10.1109/TGRS.2010.2053848 [58] 贺思三, 赵会宁, 张永顺. 基于延迟共轭相乘的弹道目标平动补偿[J]. 雷达学报, 2014, 3(5): 505–510. http://radars.ie.ac.cn/CN/abstract/abstract204.shtmlHe Si-san, Zhao Hui-ning, and Zhang Yong-shun. Translational motion compensation for ballistic targets based on delayed conjugated multiplication[J]. Journal of Radars, 2014, 3(5): 505–510. http://radars.ie.ac.cn/CN/abstract/abstract204.shtml [59] 罗迎, 张群, 王国正, 等. 基于复图像OMP分解的宽带雷达微动特征提取方法[J]. 雷达学报, 2012, 1(4): 361–369. http://radars.ie.ac.cn/CN/abstract/abstract49.shtmlLuo Ying, Zhang Qun, Wang Guo-zheng, et al.. Micro-motion signature extraction method for wideband radar based on complex image OMP decomposition[J]. Journal of Radars, 2012, 1(4): 361–369. http://radars.ie.ac.cn/CN/abstract/abstract49.shtml [60] Hadi Zayyani and Babaie-Zadeh M. Approximated Cramér-Rao bound for estimating the mixing matrix in the two-sensor noisy Sparse Component Analysis (SCA)[J]. Digital Signal Processing, 2013, 23: 771–779. doi: 10.1016/j.dsp.2012.12.016 [61] Ali Gholami. Sparse time-frequency decomposition and some applications[J]. IEEE Transactions on Geoscience and Remote Sensing, 2013, 51(6): 3598–3604. doi: 10.1109/TGRS.2012.2220144 [62] Patrick Flandrin and Pierre Borgnat. Time-frequency energy distributions meet compressed sensing[J]. IEEE Transactions on Signal Processing, 2010, 58(6): 2974–2982. doi: 10.1109/TSP.2010.2044839 [63] 陈沛, 赵拥军, 刘成城. 基于稀疏时频分解的盲波束形成算法[J]. 电子与信息学报, 2016, 38(12): 3078–3084. http://www.cnki.com.cn/Article/CJFDTOTAL-DZYX201612014.htmChen Pei, Zhao Yong-jun, and Liu Cheng-cheng. Blind beamforming algorithm based on sparse time-frequency decomposition[J]. Journal of Electronics & Information Technology, 2016, 38(12): 3078–3084. http://www.cnki.com.cn/Article/CJFDTOTAL-DZYX201612014.htm [64] 陈小龙, 关键, 于晓涵, 等. 基于短时稀疏时频分布的雷达目标微动特征提取及检测方法[J]. 电子与信息学报, 已录用.Chen Xiao-long, Guan Jian, Yu Xiao-han, et al.. Radar micro-Doppler signature extraction and detection via short-time sparse time-frequency distribution[J]. Journal of Electronics & Information Technology, Accepted. [65] Gilbert A, Indyk P, Iwen M, et al.. Recent developments in the sparse Fourier transform: A compressed Fourier transform for big data[J]. IEEE Signal Processing Magazine, 2014, 31(5): 91–100. doi: 10.1109/MSP.2014.2329131 [66] Gotz E Pfander and Holger Rauhut. Sparsity in time-frequency representations[J]. Journal of Fourier Analysis and Applications, 2010, 16(2): 233–260. doi: 10.1007/s00041-009-9086-9 [67] Nicholas Whitelonis and Hao Ling. Application of a compressed sensing based time-frequency distribution for radar signature analysis[C]. 2012 IEEE Antennas and Propagation Society International Symposium and USNC/URSI National Radio Science Meeting, 2012: 1–2. [68] Branka Jokanovic, Moeness Amin, and Srdjan Stankovic. Instantaneous frequency and time-frequency signature estimation using compressive sensing[C]. Proceedings of the SPIE 8714, Radar Sensor Technology XVII 871418, 2013. DOI: 10.1117/12.2016636. [69] 焦李成, 赵进, 杨淑媛, 等. 稀疏认知学习、计算与识别的研究进展[J]. 计算机学报, 2016, 39(4): 835–851. doi: 10.11897/SP.J.1016.2016.00835Jiao Li-cheng, Zhao Jin, Yang Shu-yuan, et al.. Research advances on sparse cognitive learning, computing and recognition[J]. Chinese Journal of Computers, 2016, 39(4): 835–851. doi: 10.11897/SP.J.1016.2016.00835 -





计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

