
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公2017年 6卷 第2期
 上一期
上一期
2017, 6(2): 115-135.
 摘要
摘要 8287KB
8287KB
摘要:
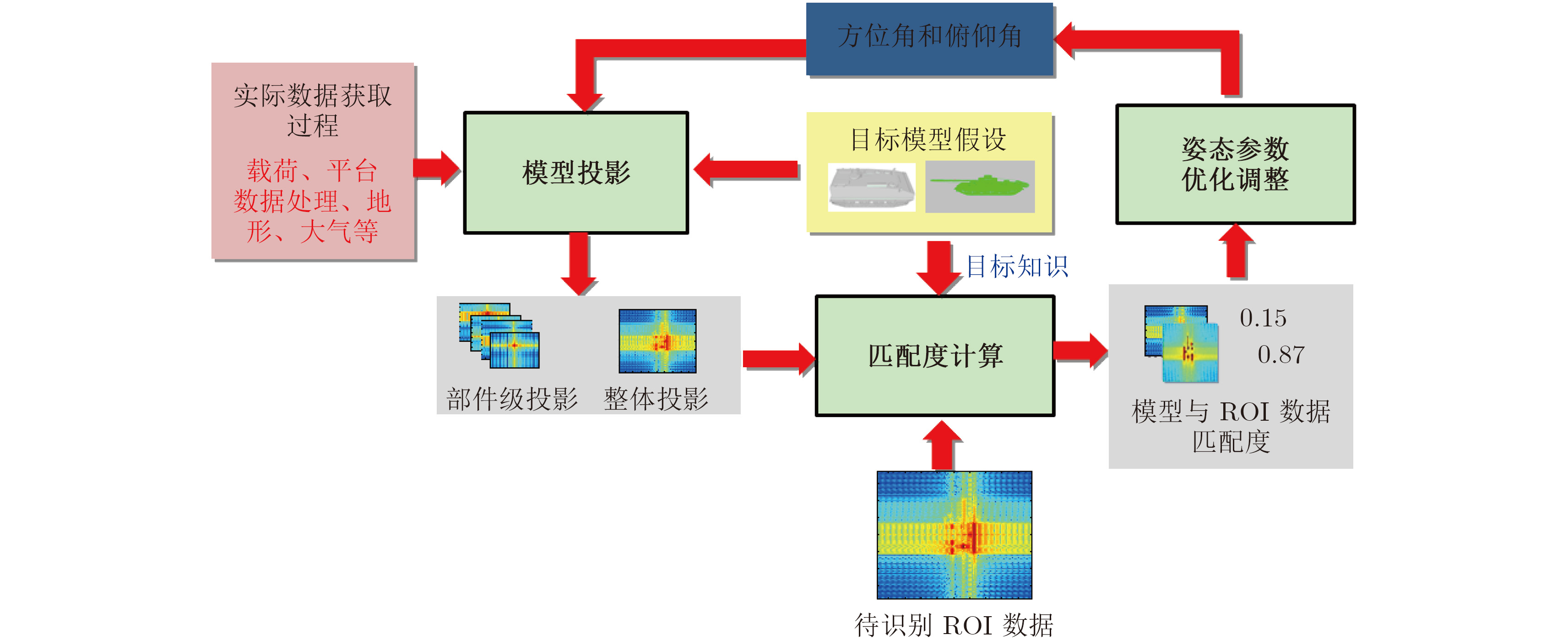
合成孔径雷达目标识别是雷达数据解译中一个长期研究的难点问题。近年来,基于模型的SAR目标识别方法由于在扩展条件下的识别性能表现良好而备受关注。在联合国内多家研究单位进行攻关的基础上,该文简要阐述了对该问题的初步研究成果及思考。首先从3个方面出发梳理了散射部件模型发展的技术脉络并对其进行了补充完善;然后从正向推算和逆向反演两条技术途径提出了复杂目标电磁散射参数化建模方法;最后提出了基于复杂目标电磁散射参数化模型的目标识别新框架。论文最后对基于模型的SAR目标识别下一步研究方向进行了展望。 合成孔径雷达目标识别是雷达数据解译中一个长期研究的难点问题。近年来,基于模型的SAR目标识别方法由于在扩展条件下的识别性能表现良好而备受关注。在联合国内多家研究单位进行攻关的基础上,该文简要阐述了对该问题的初步研究成果及思考。首先从3个方面出发梳理了散射部件模型发展的技术脉络并对其进行了补充完善;然后从正向推算和逆向反演两条技术途径提出了复杂目标电磁散射参数化建模方法;最后提出了基于复杂目标电磁散射参数化模型的目标识别新框架。论文最后对基于模型的SAR目标识别下一步研究方向进行了展望。
合成孔径雷达目标识别是雷达数据解译中一个长期研究的难点问题。近年来,基于模型的SAR目标识别方法由于在扩展条件下的识别性能表现良好而备受关注。在联合国内多家研究单位进行攻关的基础上,该文简要阐述了对该问题的初步研究成果及思考。首先从3个方面出发梳理了散射部件模型发展的技术脉络并对其进行了补充完善;然后从正向推算和逆向反演两条技术途径提出了复杂目标电磁散射参数化建模方法;最后提出了基于复杂目标电磁散射参数化模型的目标识别新框架。论文最后对基于模型的SAR目标识别下一步研究方向进行了展望。 合成孔径雷达目标识别是雷达数据解译中一个长期研究的难点问题。近年来,基于模型的SAR目标识别方法由于在扩展条件下的识别性能表现良好而备受关注。在联合国内多家研究单位进行攻关的基础上,该文简要阐述了对该问题的初步研究成果及思考。首先从3个方面出发梳理了散射部件模型发展的技术脉络并对其进行了补充完善;然后从正向推算和逆向反演两条技术途径提出了复杂目标电磁散射参数化建模方法;最后提出了基于复杂目标电磁散射参数化模型的目标识别新框架。论文最后对基于模型的SAR目标识别下一步研究方向进行了展望。






2017, 6(2): 136-148.
摘要:
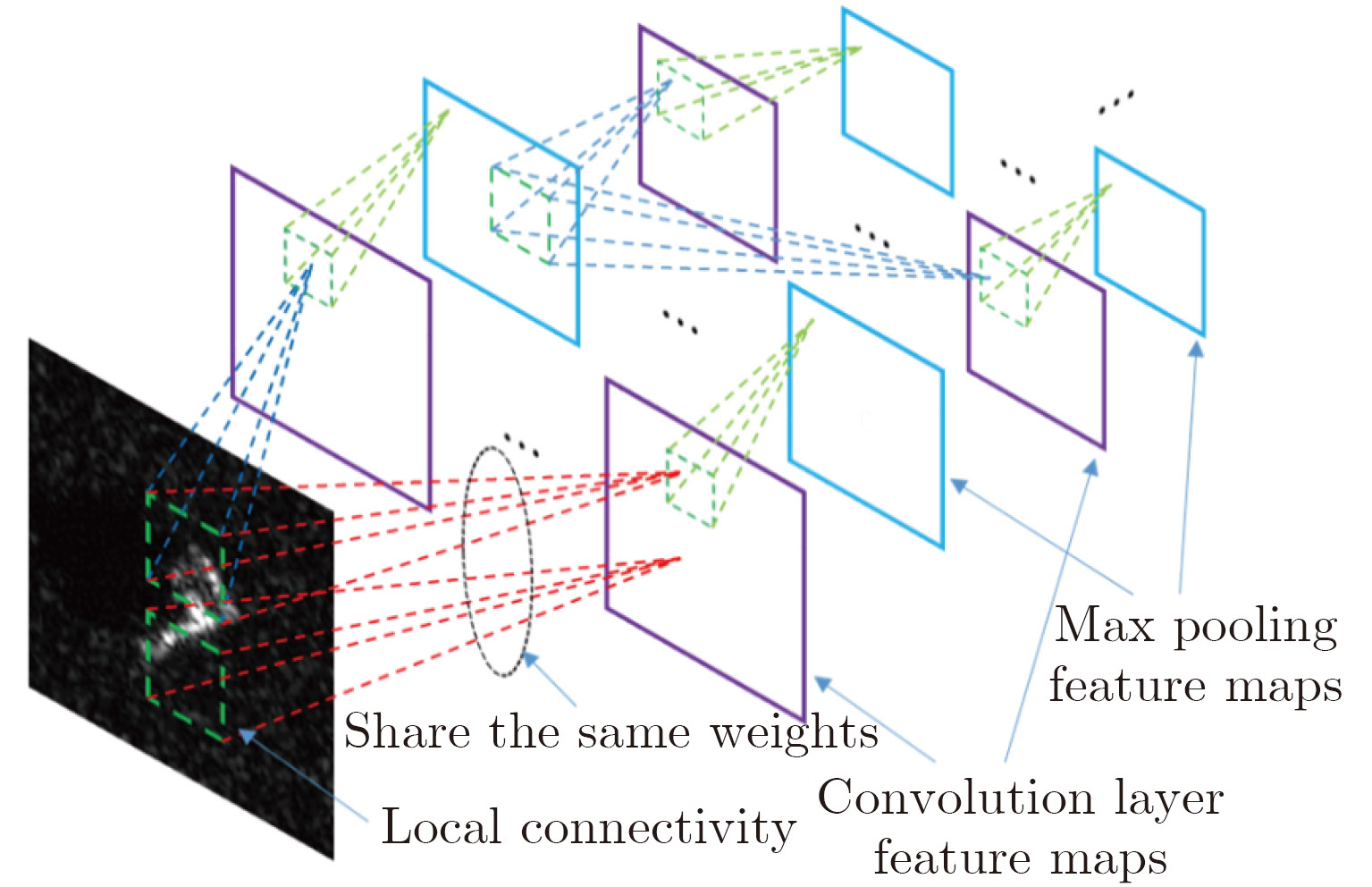
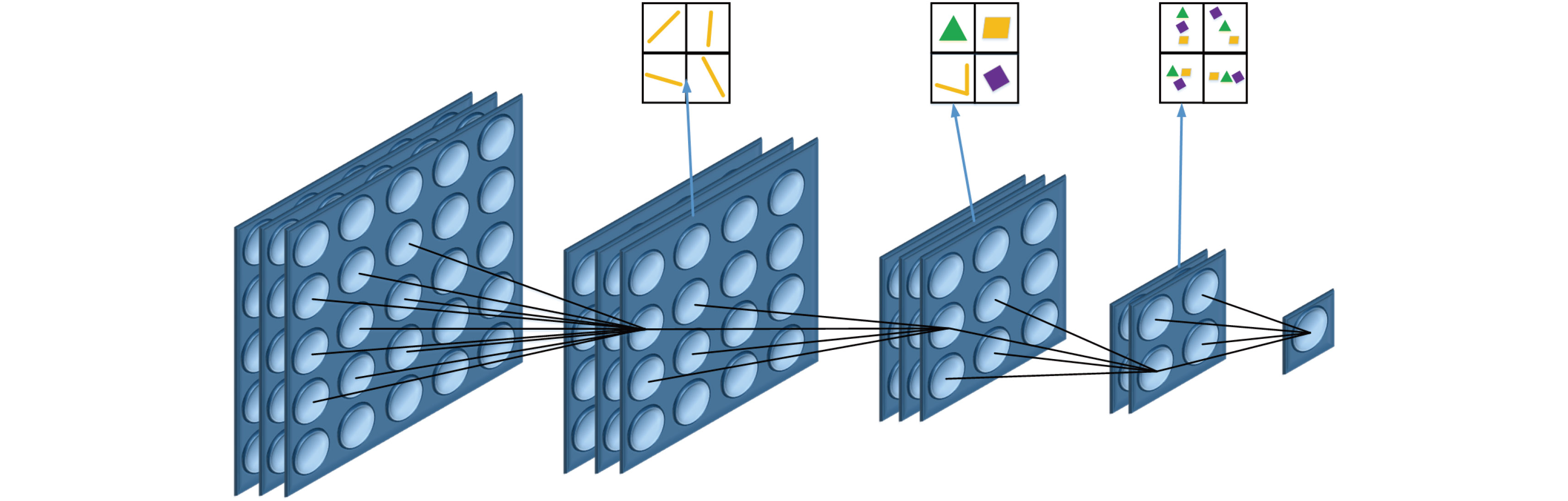
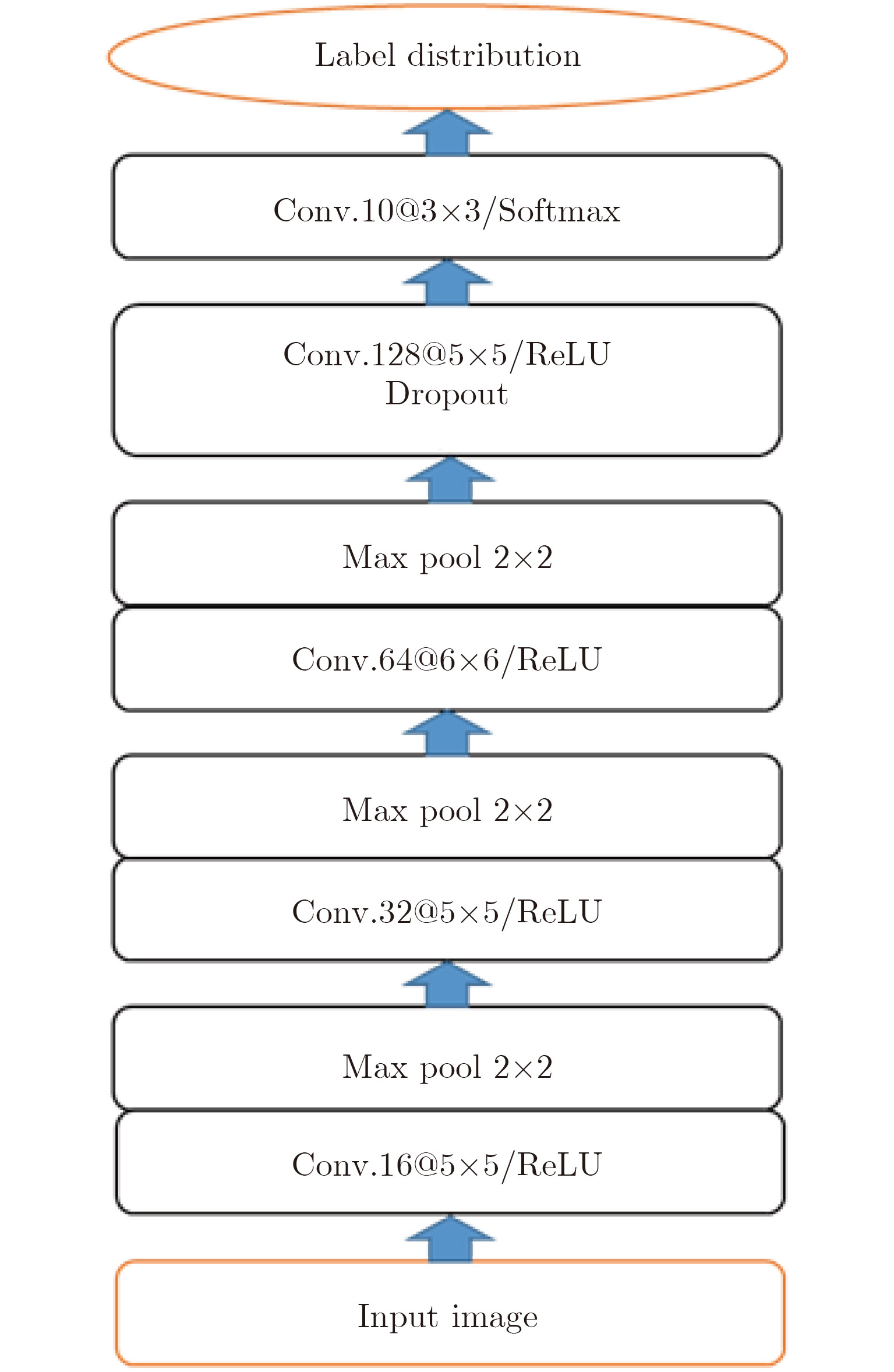
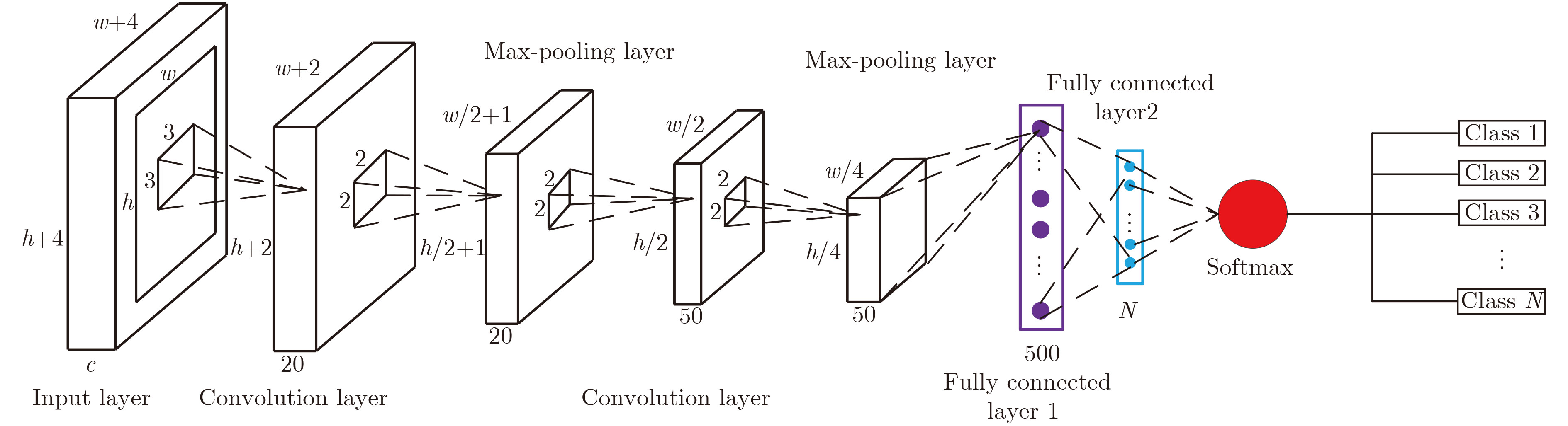
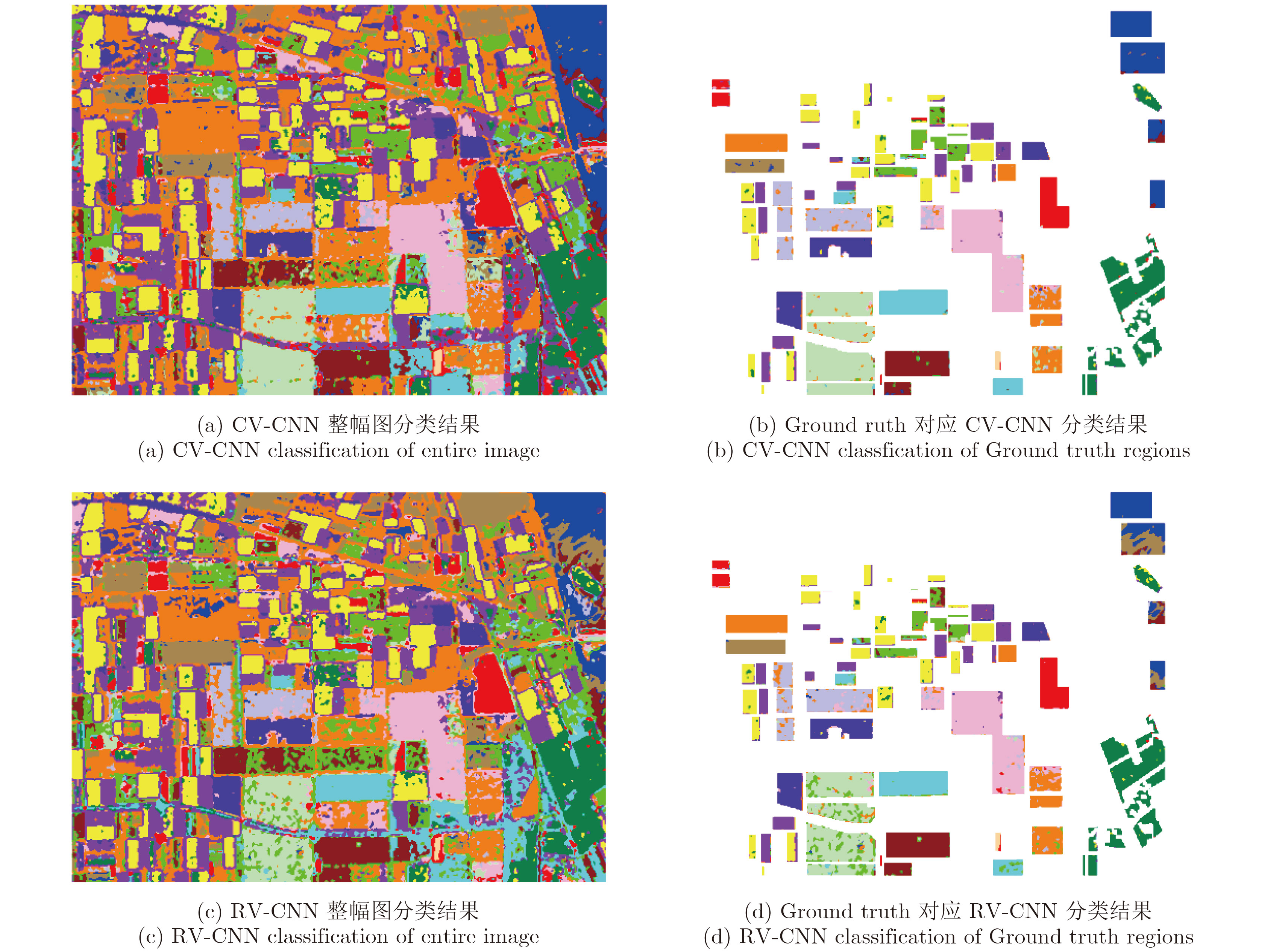
深度卷积网络等深度学习算法变革了计算机视觉领域,在多种应用上的效果都超过了以往传统图像处理算法。该文简要回顾了将深度学习应用在SAR图像目标识别与地物分类中的工作。利用深度卷积网络从SAR图像中自动学习多层的特征表征,再利用学习到的特征进行目标检测与目标分类。将深度卷积网络应用于SAR目标分类数据集MSTAR上,10类目标平均分类精度达到了99%。针对带相位的极化SAR图像,该文提出了复数深度卷积网络,将该算法应用于全极化SAR图像地物分类,Flevoland 15类地物平均分类精度达到了95%。
深度卷积网络等深度学习算法变革了计算机视觉领域,在多种应用上的效果都超过了以往传统图像处理算法。该文简要回顾了将深度学习应用在SAR图像目标识别与地物分类中的工作。利用深度卷积网络从SAR图像中自动学习多层的特征表征,再利用学习到的特征进行目标检测与目标分类。将深度卷积网络应用于SAR目标分类数据集MSTAR上,10类目标平均分类精度达到了99%。针对带相位的极化SAR图像,该文提出了复数深度卷积网络,将该算法应用于全极化SAR图像地物分类,Flevoland 15类地物平均分类精度达到了95%。










2017, 6(2): 149-156.
摘要:
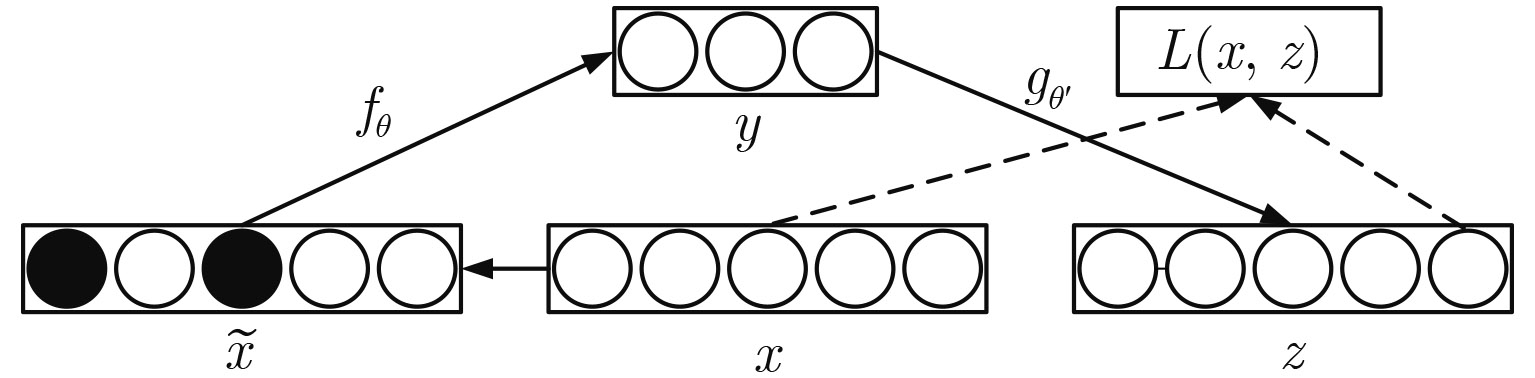
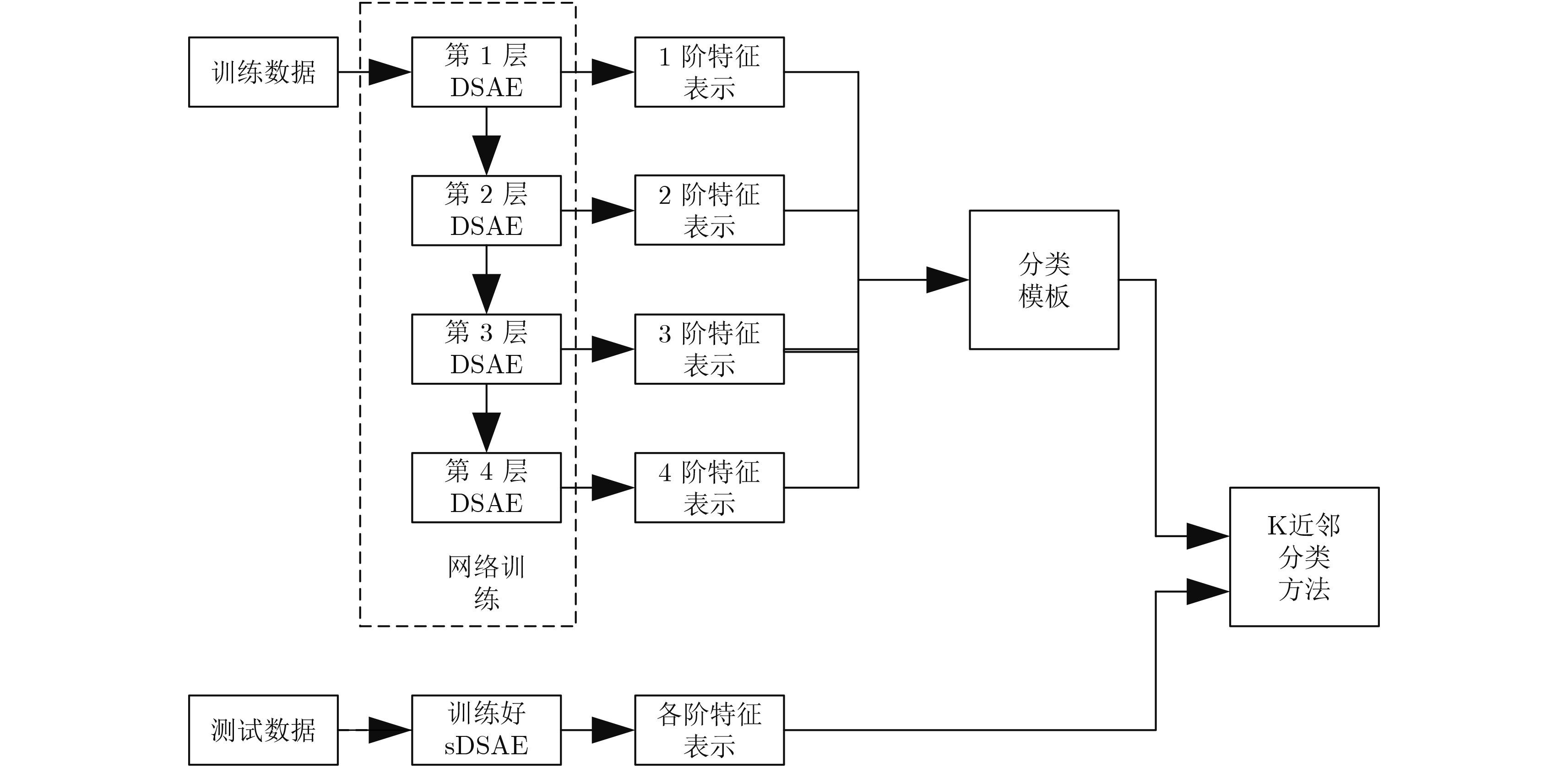
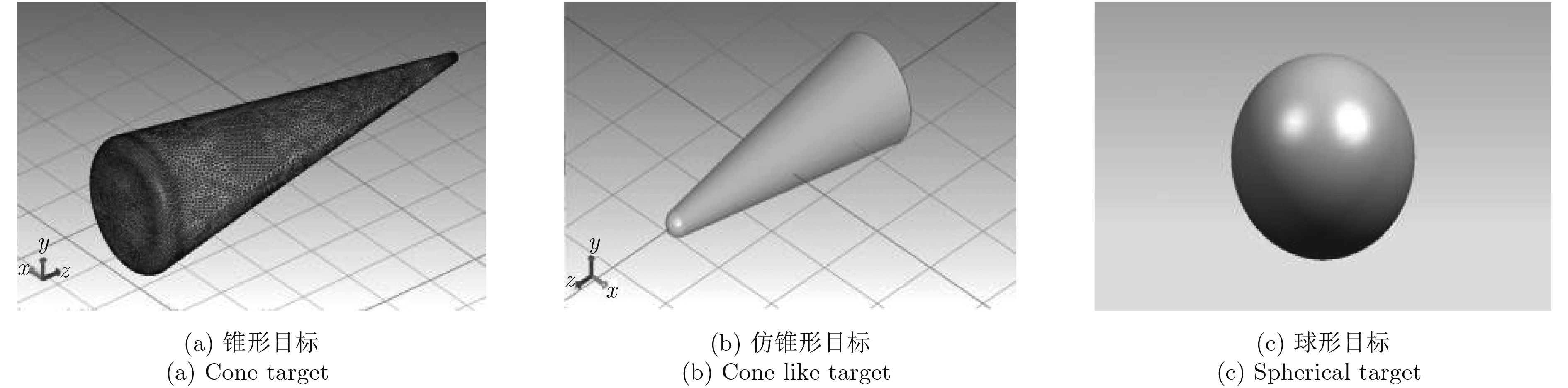
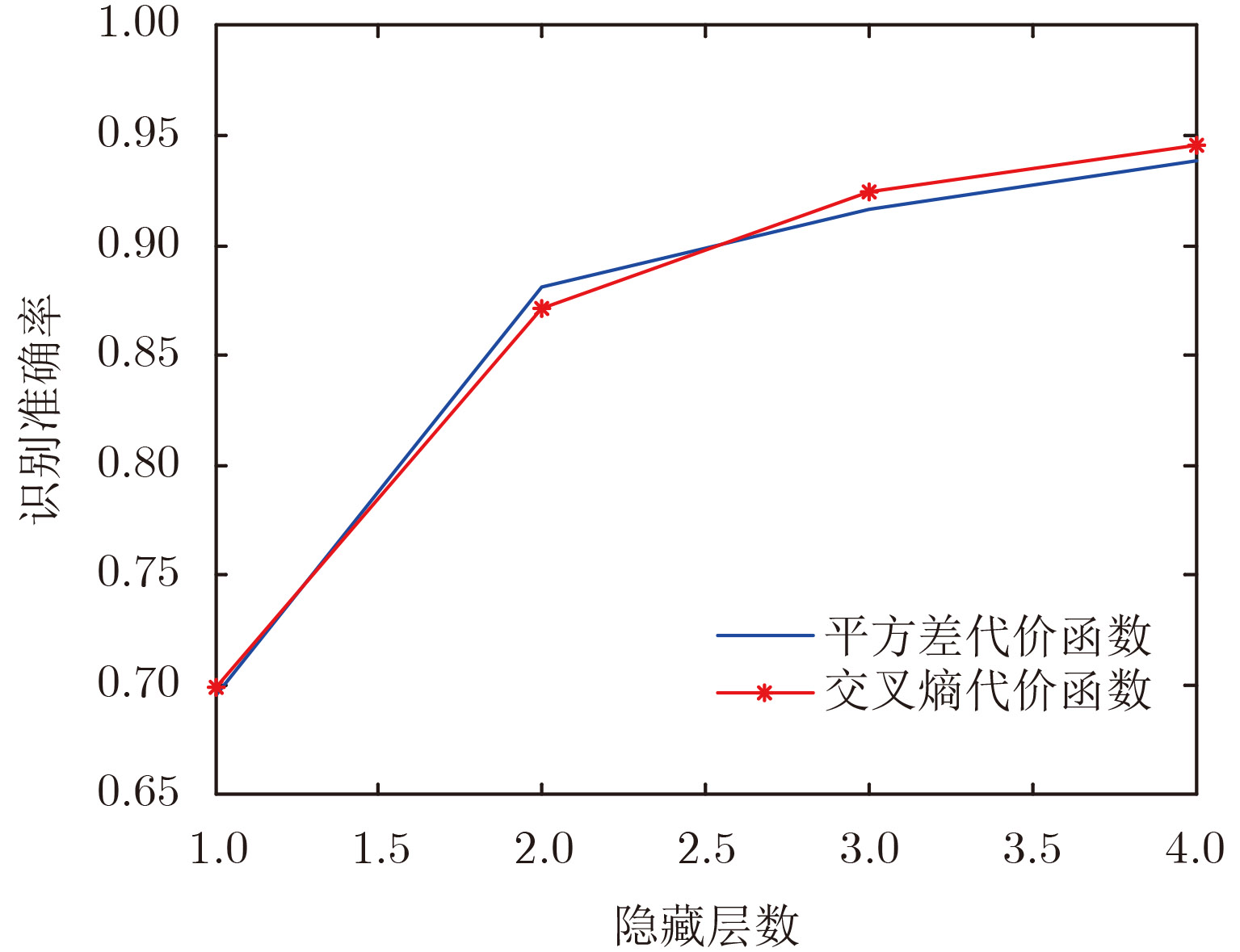
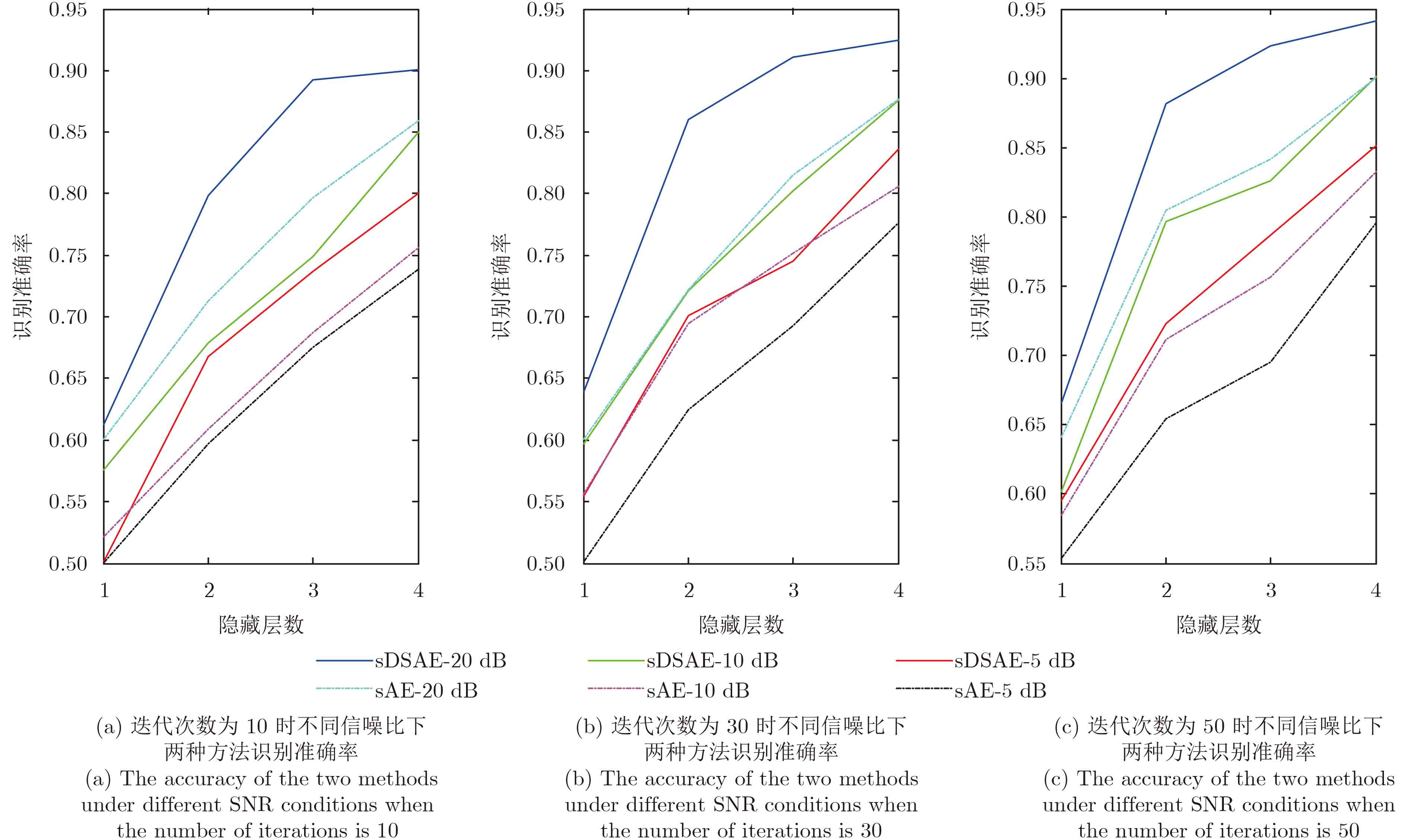
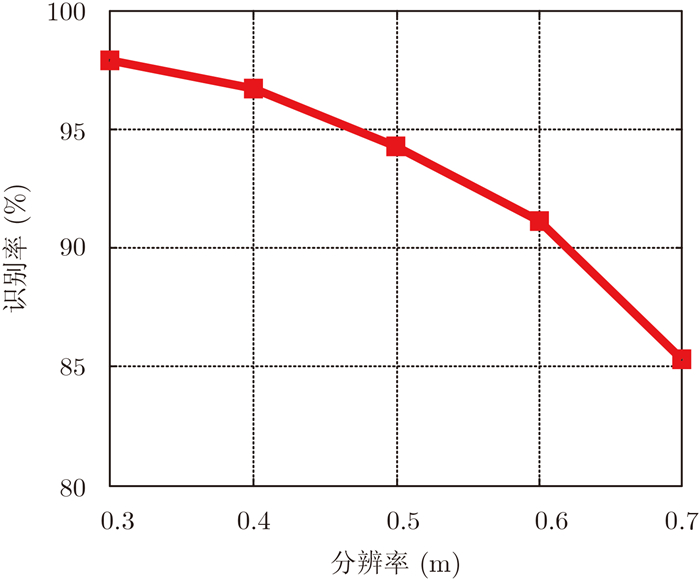
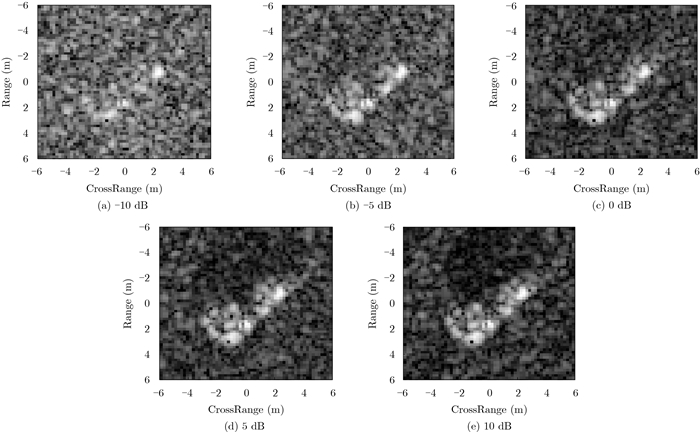
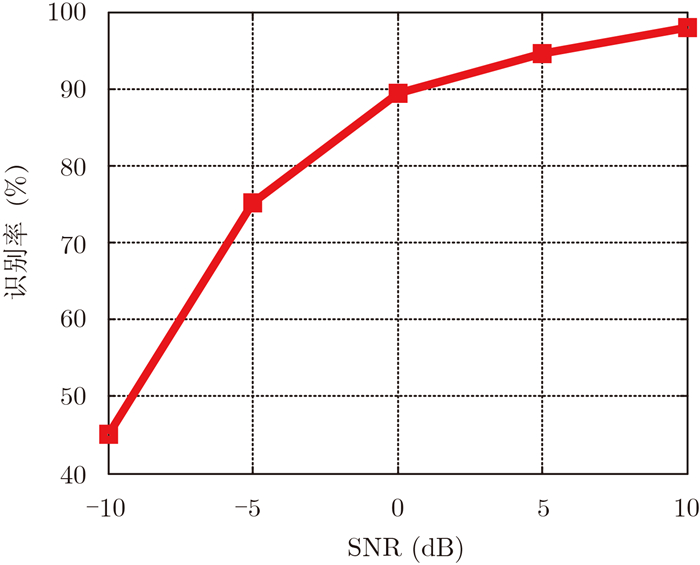
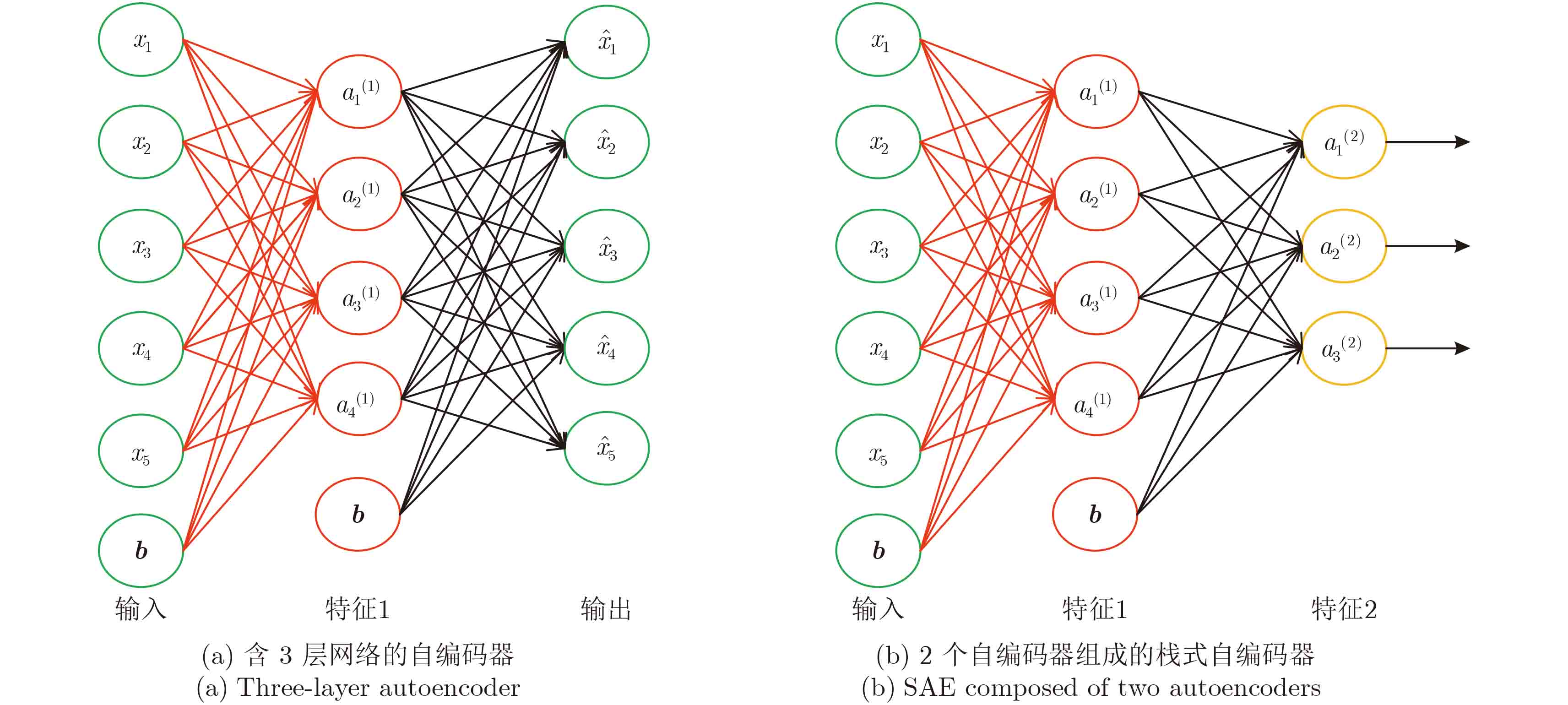
雷达目标识别中特征提取是关键步骤,所提取特征的好坏决定着识别效果的优劣,但传统特征提取方法很难发掘目标数据深层次本质特征。深度学习理论中的自动编码器模型能够用数据去学习特征,获得数据不同层次的特征表达。同时为消除噪声影响,该文提出一种基于栈式降噪稀疏自动编码器的雷达目标识别方法,通过设置不同隐藏层数和迭代次数,从雷达数据中直接高效地提取识别所需的各层次特征。暗室仿真数据实验结果验证了该方法较K近邻分类方法及传统栈式自编码器有更好的识别效果。 雷达目标识别中特征提取是关键步骤,所提取特征的好坏决定着识别效果的优劣,但传统特征提取方法很难发掘目标数据深层次本质特征。深度学习理论中的自动编码器模型能够用数据去学习特征,获得数据不同层次的特征表达。同时为消除噪声影响,该文提出一种基于栈式降噪稀疏自动编码器的雷达目标识别方法,通过设置不同隐藏层数和迭代次数,从雷达数据中直接高效地提取识别所需的各层次特征。暗室仿真数据实验结果验证了该方法较K近邻分类方法及传统栈式自编码器有更好的识别效果。
雷达目标识别中特征提取是关键步骤,所提取特征的好坏决定着识别效果的优劣,但传统特征提取方法很难发掘目标数据深层次本质特征。深度学习理论中的自动编码器模型能够用数据去学习特征,获得数据不同层次的特征表达。同时为消除噪声影响,该文提出一种基于栈式降噪稀疏自动编码器的雷达目标识别方法,通过设置不同隐藏层数和迭代次数,从雷达数据中直接高效地提取识别所需的各层次特征。暗室仿真数据实验结果验证了该方法较K近邻分类方法及传统栈式自编码器有更好的识别效果。 雷达目标识别中特征提取是关键步骤,所提取特征的好坏决定着识别效果的优劣,但传统特征提取方法很难发掘目标数据深层次本质特征。深度学习理论中的自动编码器模型能够用数据去学习特征,获得数据不同层次的特征表达。同时为消除噪声影响,该文提出一种基于栈式降噪稀疏自动编码器的雷达目标识别方法,通过设置不同隐藏层数和迭代次数,从雷达数据中直接高效地提取识别所需的各层次特征。暗室仿真数据实验结果验证了该方法较K近邻分类方法及传统栈式自编码器有更好的识别效果。



2017, 6(2): 157-166.
摘要:
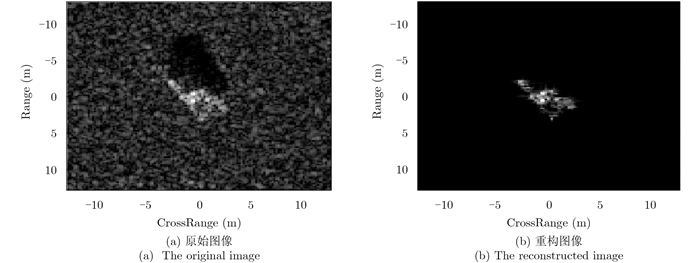
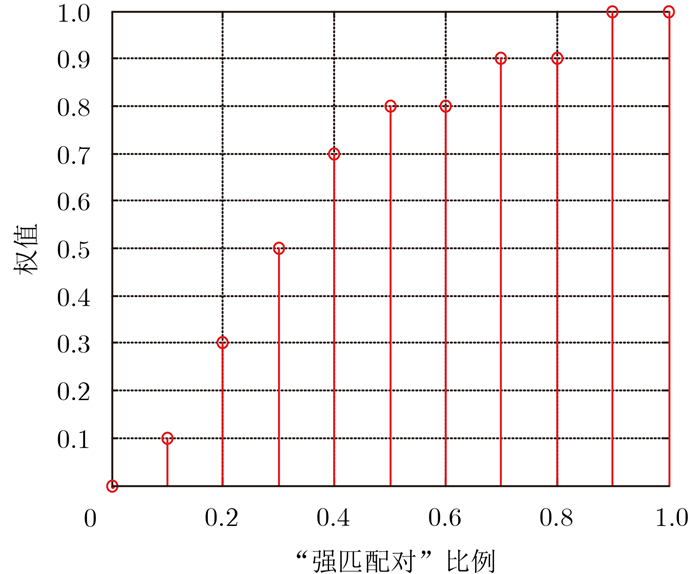
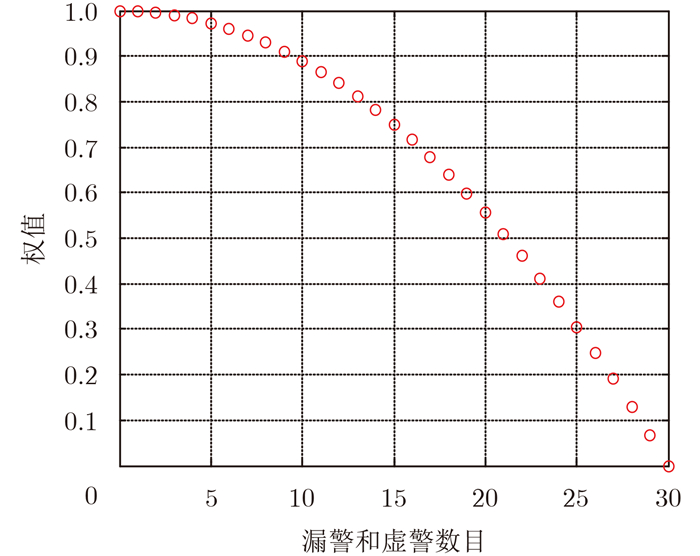
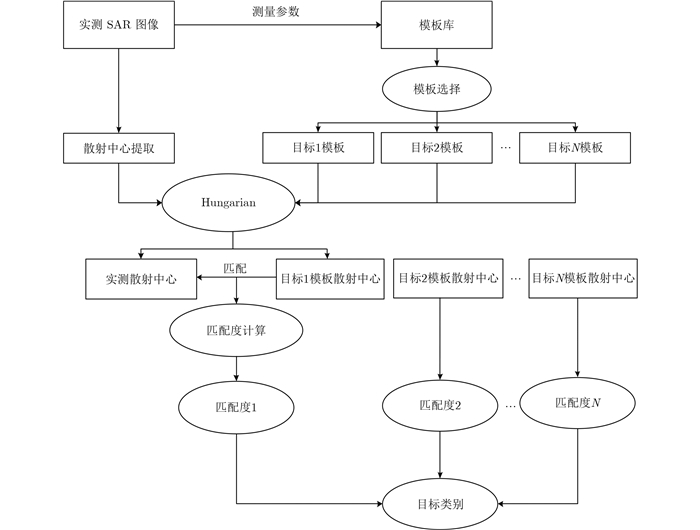
属性散射中心是合成孔径雷达 (Synthetic Aperture Radar, SAR) 图像的一个重要特征。该文提出了一种属性散射中心匹配方法并将其运用于SAR目标识别中。该方法首先基于属性散射中心模型提取待识别SAR图像和模板SAR图像的属性散射中心,进而采用Hungarian算法实现散射中心的匹配。在建立的匹配关系的基础上,设计了一种稳健的散射中心匹配度度量方法计算待识别散射中心与各类模板散射中心的匹配度。该匹配度准则充分考虑了单个散射中心强弱、匹配对强弱以及漏警、虚警带来的影响,对于散射中心集的匹配度的评价更为全面。基于Moving and Stationary Target Acquisition and Recognition (MSTAR) 数据集的实验验证了方法的有效性。 属性散射中心是合成孔径雷达 (Synthetic Aperture Radar, SAR) 图像的一个重要特征。该文提出了一种属性散射中心匹配方法并将其运用于SAR目标识别中。该方法首先基于属性散射中心模型提取待识别SAR图像和模板SAR图像的属性散射中心,进而采用Hungarian算法实现散射中心的匹配。在建立的匹配关系的基础上,设计了一种稳健的散射中心匹配度度量方法计算待识别散射中心与各类模板散射中心的匹配度。该匹配度准则充分考虑了单个散射中心强弱、匹配对强弱以及漏警、虚警带来的影响,对于散射中心集的匹配度的评价更为全面。基于Moving and Stationary Target Acquisition and Recognition (MSTAR) 数据集的实验验证了方法的有效性。
属性散射中心是合成孔径雷达 (Synthetic Aperture Radar, SAR) 图像的一个重要特征。该文提出了一种属性散射中心匹配方法并将其运用于SAR目标识别中。该方法首先基于属性散射中心模型提取待识别SAR图像和模板SAR图像的属性散射中心,进而采用Hungarian算法实现散射中心的匹配。在建立的匹配关系的基础上,设计了一种稳健的散射中心匹配度度量方法计算待识别散射中心与各类模板散射中心的匹配度。该匹配度准则充分考虑了单个散射中心强弱、匹配对强弱以及漏警、虚警带来的影响,对于散射中心集的匹配度的评价更为全面。基于Moving and Stationary Target Acquisition and Recognition (MSTAR) 数据集的实验验证了方法的有效性。 属性散射中心是合成孔径雷达 (Synthetic Aperture Radar, SAR) 图像的一个重要特征。该文提出了一种属性散射中心匹配方法并将其运用于SAR目标识别中。该方法首先基于属性散射中心模型提取待识别SAR图像和模板SAR图像的属性散射中心,进而采用Hungarian算法实现散射中心的匹配。在建立的匹配关系的基础上,设计了一种稳健的散射中心匹配度度量方法计算待识别散射中心与各类模板散射中心的匹配度。该匹配度准则充分考虑了单个散射中心强弱、匹配对强弱以及漏警、虚警带来的影响,对于散射中心集的匹配度的评价更为全面。基于Moving and Stationary Target Acquisition and Recognition (MSTAR) 数据集的实验验证了方法的有效性。




2017, 6(2): 167-176.
摘要:
该文提出了一种基于栈式自编码器(Stacked AutoEncoder, SAE)特征融合的合成孔径雷达(Synthetic Aperture Rader, SAR)图像车辆目标识别算法。首先,该算法提取了SAR图像的25种基线特征(baseline features)和局部纹理特征(Three-Patch Local Binary Patterns, TPLBP)。然后将特征串联输入SAE网络中进行融合,采用逐层贪婪训练法对网络进行预训练。最后利用softmax分类器微调网络,提高网络融合性能。另外,该文提取了SAR图像的Gabor纹理特征,进行了不同特征之间的融合实验。结果表明基线特征与TPLBP特征冗余性小,互补性好,融合后的特征区分性大。与直接利用SAE, CNN (Convolutional Neural Network)进行目标识别的算法相比,基于SAE的特征融合算法简化了网络结构,提高了识别精度与识别效率。基于MSTAR数据集的10类目标分类精度达95.88%,验证了算法的有效性。 该文提出了一种基于栈式自编码器(Stacked AutoEncoder, SAE)特征融合的合成孔径雷达(Synthetic Aperture Rader, SAR)图像车辆目标识别算法。首先,该算法提取了SAR图像的25种基线特征(baseline features)和局部纹理特征(Three-Patch Local Binary Patterns, TPLBP)。然后将特征串联输入SAE网络中进行融合,采用逐层贪婪训练法对网络进行预训练。最后利用softmax分类器微调网络,提高网络融合性能。另外,该文提取了SAR图像的Gabor纹理特征,进行了不同特征之间的融合实验。结果表明基线特征与TPLBP特征冗余性小,互补性好,融合后的特征区分性大。与直接利用SAE, CNN (Convolutional Neural Network)进行目标识别的算法相比,基于SAE的特征融合算法简化了网络结构,提高了识别精度与识别效率。基于MSTAR数据集的10类目标分类精度达95.88%,验证了算法的有效性。
该文提出了一种基于栈式自编码器(Stacked AutoEncoder, SAE)特征融合的合成孔径雷达(Synthetic Aperture Rader, SAR)图像车辆目标识别算法。首先,该算法提取了SAR图像的25种基线特征(baseline features)和局部纹理特征(Three-Patch Local Binary Patterns, TPLBP)。然后将特征串联输入SAE网络中进行融合,采用逐层贪婪训练法对网络进行预训练。最后利用softmax分类器微调网络,提高网络融合性能。另外,该文提取了SAR图像的Gabor纹理特征,进行了不同特征之间的融合实验。结果表明基线特征与TPLBP特征冗余性小,互补性好,融合后的特征区分性大。与直接利用SAE, CNN (Convolutional Neural Network)进行目标识别的算法相比,基于SAE的特征融合算法简化了网络结构,提高了识别精度与识别效率。基于MSTAR数据集的10类目标分类精度达95.88%,验证了算法的有效性。 该文提出了一种基于栈式自编码器(Stacked AutoEncoder, SAE)特征融合的合成孔径雷达(Synthetic Aperture Rader, SAR)图像车辆目标识别算法。首先,该算法提取了SAR图像的25种基线特征(baseline features)和局部纹理特征(Three-Patch Local Binary Patterns, TPLBP)。然后将特征串联输入SAE网络中进行融合,采用逐层贪婪训练法对网络进行预训练。最后利用softmax分类器微调网络,提高网络融合性能。另外,该文提取了SAR图像的Gabor纹理特征,进行了不同特征之间的融合实验。结果表明基线特征与TPLBP特征冗余性小,互补性好,融合后的特征区分性大。与直接利用SAE, CNN (Convolutional Neural Network)进行目标识别的算法相比,基于SAE的特征融合算法简化了网络结构,提高了识别精度与识别效率。基于MSTAR数据集的10类目标分类精度达95.88%,验证了算法的有效性。








2017, 6(2): 177-185.
摘要:
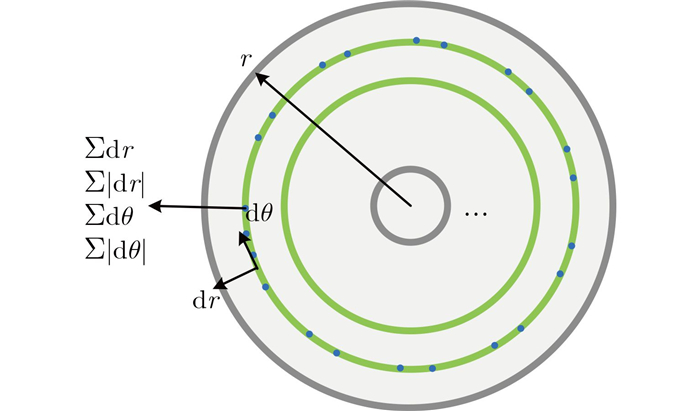
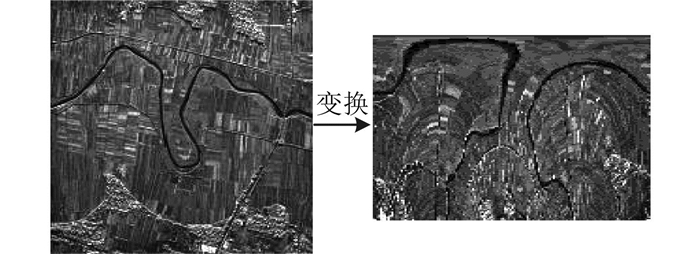
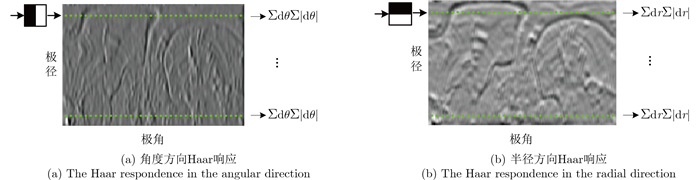
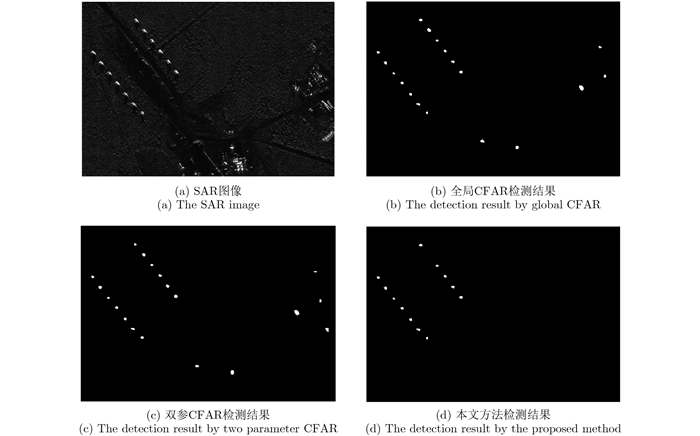
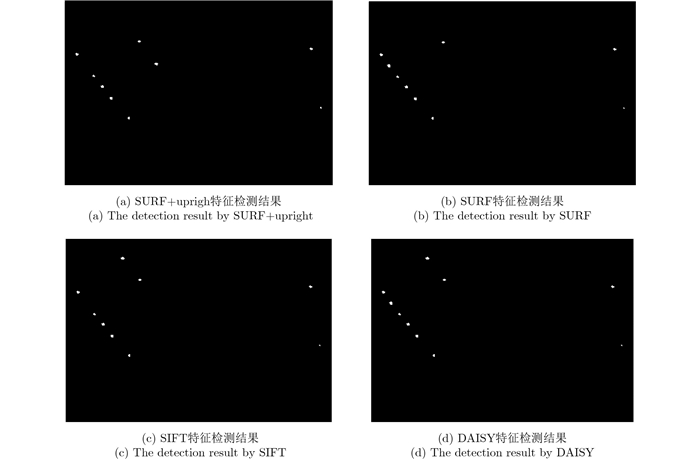
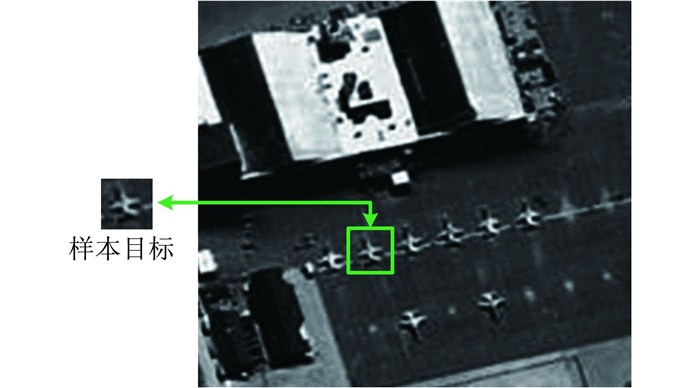
该文提出了一种基于单样本特征提取的SAR感兴趣目标检测方法,充分利用选取的单个目标样本的有效特征实现SAR图像中同类目标的检测。该方法首先检测SAR图像中的潜在感兴趣目标,然后分别提取目标样本和潜在目标中的面积特征和纹理描述特征,并通过不同的匹配方式逐步剔除潜在兴趣目标中的虚假目标。文中提出的纹理描述通过提取具有一定旋转不变性的区域特征描述的方式来适应目标的不同方位,并对SAR噪声和形变具有一定的抑制作用。与多种特征描述方式的对比测试表明了该文提出方法的可行性和有效性。 该文提出了一种基于单样本特征提取的SAR感兴趣目标检测方法,充分利用选取的单个目标样本的有效特征实现SAR图像中同类目标的检测。该方法首先检测SAR图像中的潜在感兴趣目标,然后分别提取目标样本和潜在目标中的面积特征和纹理描述特征,并通过不同的匹配方式逐步剔除潜在兴趣目标中的虚假目标。文中提出的纹理描述通过提取具有一定旋转不变性的区域特征描述的方式来适应目标的不同方位,并对SAR噪声和形变具有一定的抑制作用。与多种特征描述方式的对比测试表明了该文提出方法的可行性和有效性。
该文提出了一种基于单样本特征提取的SAR感兴趣目标检测方法,充分利用选取的单个目标样本的有效特征实现SAR图像中同类目标的检测。该方法首先检测SAR图像中的潜在感兴趣目标,然后分别提取目标样本和潜在目标中的面积特征和纹理描述特征,并通过不同的匹配方式逐步剔除潜在兴趣目标中的虚假目标。文中提出的纹理描述通过提取具有一定旋转不变性的区域特征描述的方式来适应目标的不同方位,并对SAR噪声和形变具有一定的抑制作用。与多种特征描述方式的对比测试表明了该文提出方法的可行性和有效性。 该文提出了一种基于单样本特征提取的SAR感兴趣目标检测方法,充分利用选取的单个目标样本的有效特征实现SAR图像中同类目标的检测。该方法首先检测SAR图像中的潜在感兴趣目标,然后分别提取目标样本和潜在目标中的面积特征和纹理描述特征,并通过不同的匹配方式逐步剔除潜在兴趣目标中的虚假目标。文中提出的纹理描述通过提取具有一定旋转不变性的区域特征描述的方式来适应目标的不同方位,并对SAR噪声和形变具有一定的抑制作用。与多种特征描述方式的对比测试表明了该文提出方法的可行性和有效性。





2017, 6(2): 186-194.
摘要:
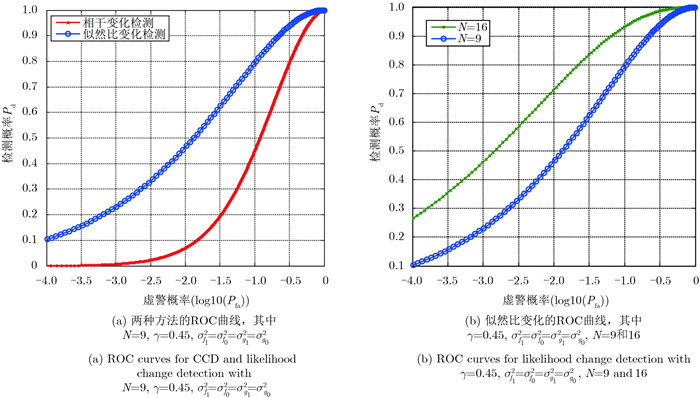
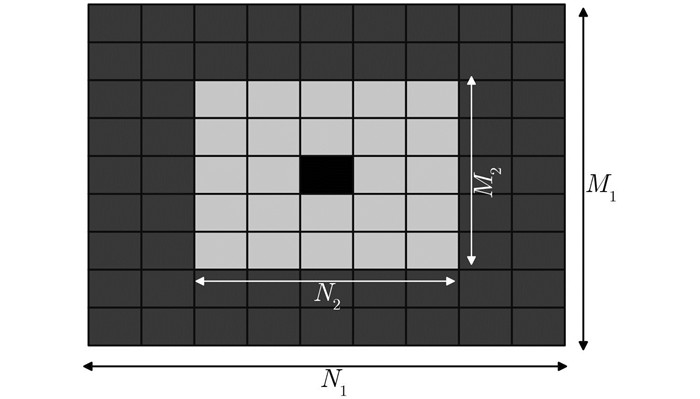
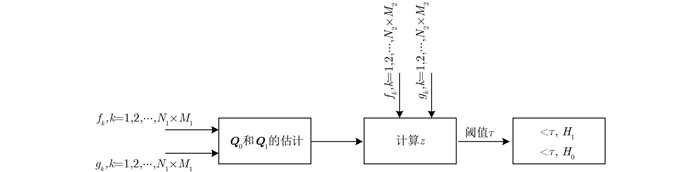
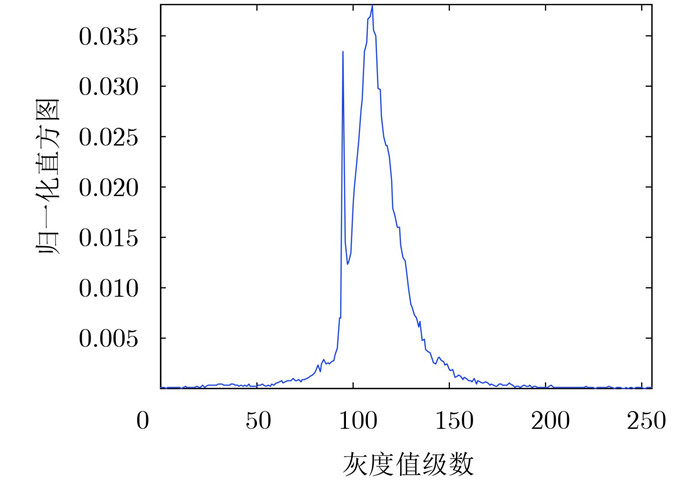
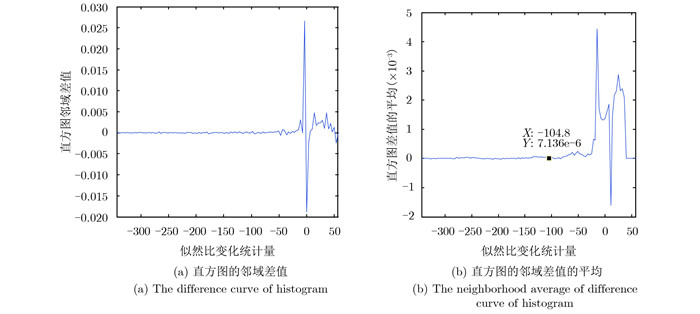
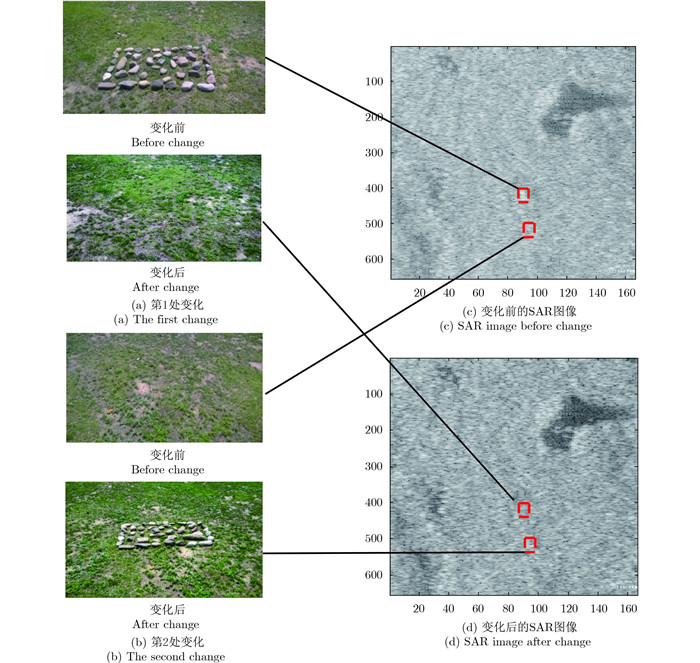
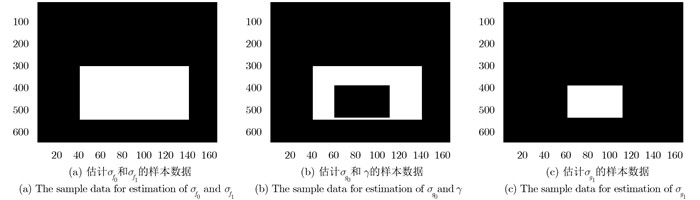
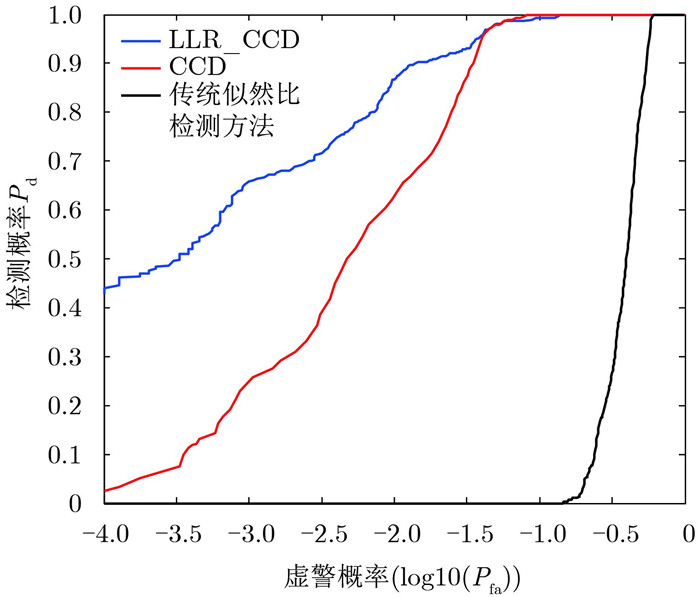
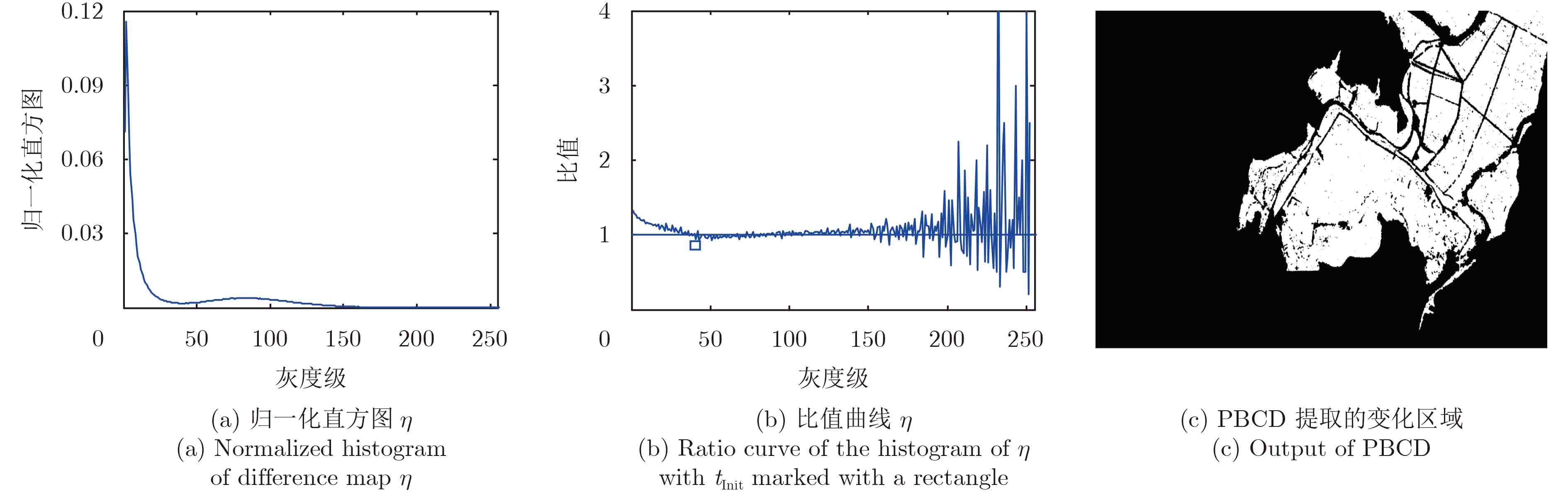
相干变化检测利用相位差异可以检测出场景中的微小变化。该文针对相干变化检测中的两个问题:虚警高和阈值难选择,在原有似然比检测算法的基础上做了两点改进:运用最大似然估计优化似然比统计量中的参数,并采用邻域滑动窗口使得参数估计结果更加准确稳健;根据差异图像直方图提出了一种基于邻域直方图差的自动阈值选取方法。实测数据处理结果验证了算法的有效性。 相干变化检测利用相位差异可以检测出场景中的微小变化。该文针对相干变化检测中的两个问题:虚警高和阈值难选择,在原有似然比检测算法的基础上做了两点改进:运用最大似然估计优化似然比统计量中的参数,并采用邻域滑动窗口使得参数估计结果更加准确稳健;根据差异图像直方图提出了一种基于邻域直方图差的自动阈值选取方法。实测数据处理结果验证了算法的有效性。
相干变化检测利用相位差异可以检测出场景中的微小变化。该文针对相干变化检测中的两个问题:虚警高和阈值难选择,在原有似然比检测算法的基础上做了两点改进:运用最大似然估计优化似然比统计量中的参数,并采用邻域滑动窗口使得参数估计结果更加准确稳健;根据差异图像直方图提出了一种基于邻域直方图差的自动阈值选取方法。实测数据处理结果验证了算法的有效性。 相干变化检测利用相位差异可以检测出场景中的微小变化。该文针对相干变化检测中的两个问题:虚警高和阈值难选择,在原有似然比检测算法的基础上做了两点改进:运用最大似然估计优化似然比统计量中的参数,并采用邻域滑动窗口使得参数估计结果更加准确稳健;根据差异图像直方图提出了一种基于邻域直方图差的自动阈值选取方法。实测数据处理结果验证了算法的有效性。

2017, 6(2): 195-203.
摘要:
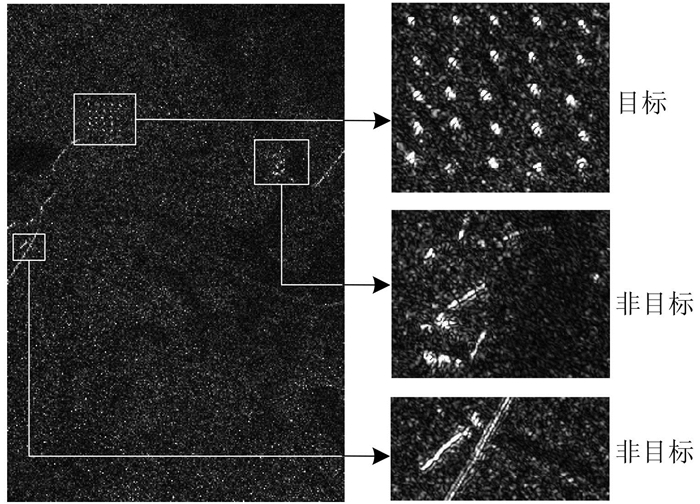
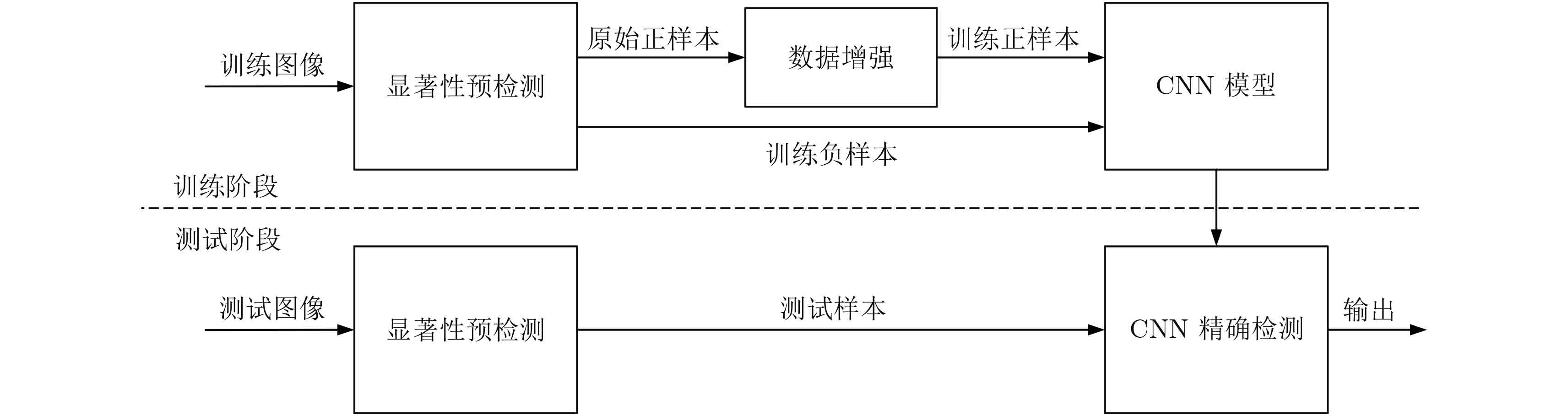
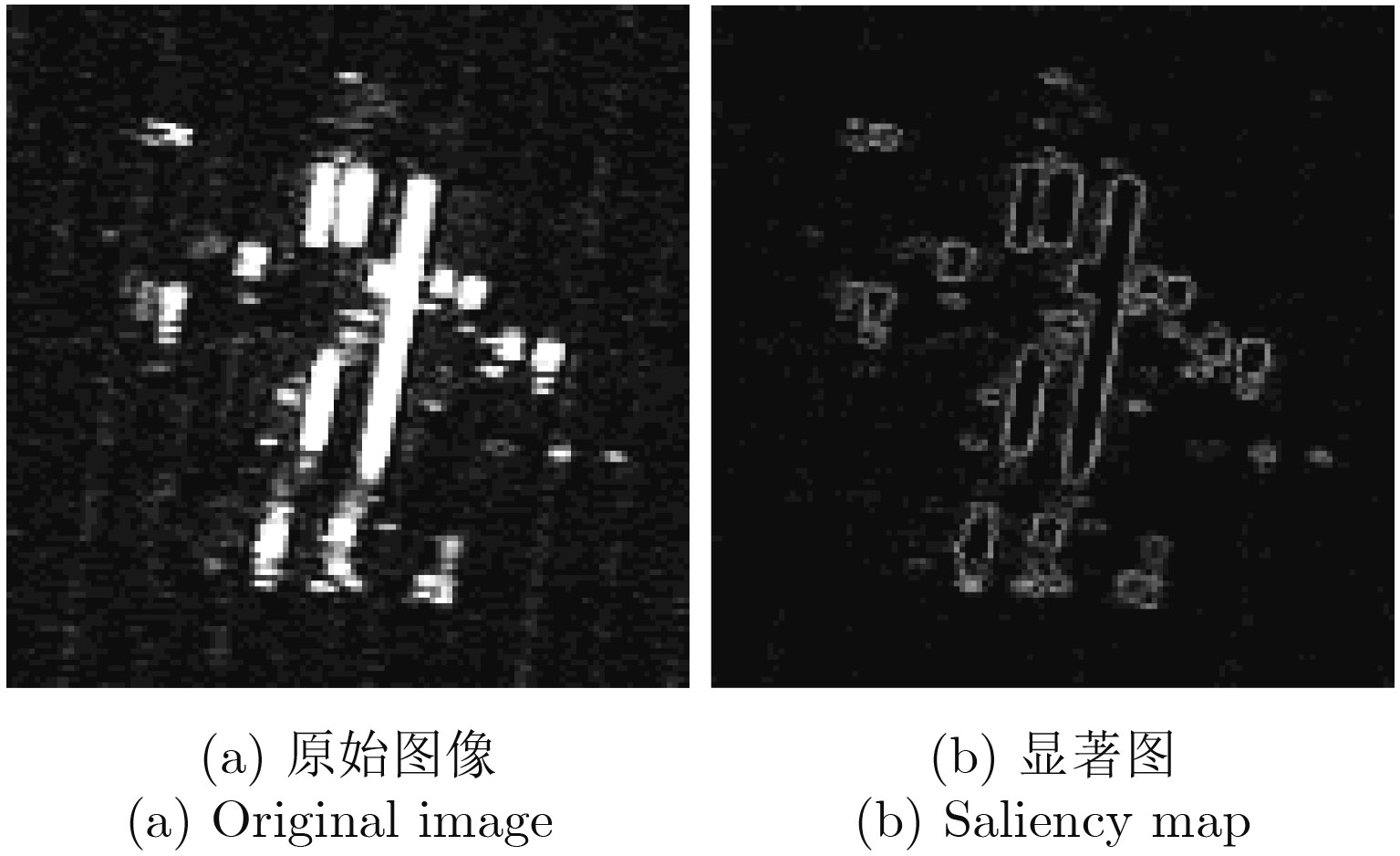
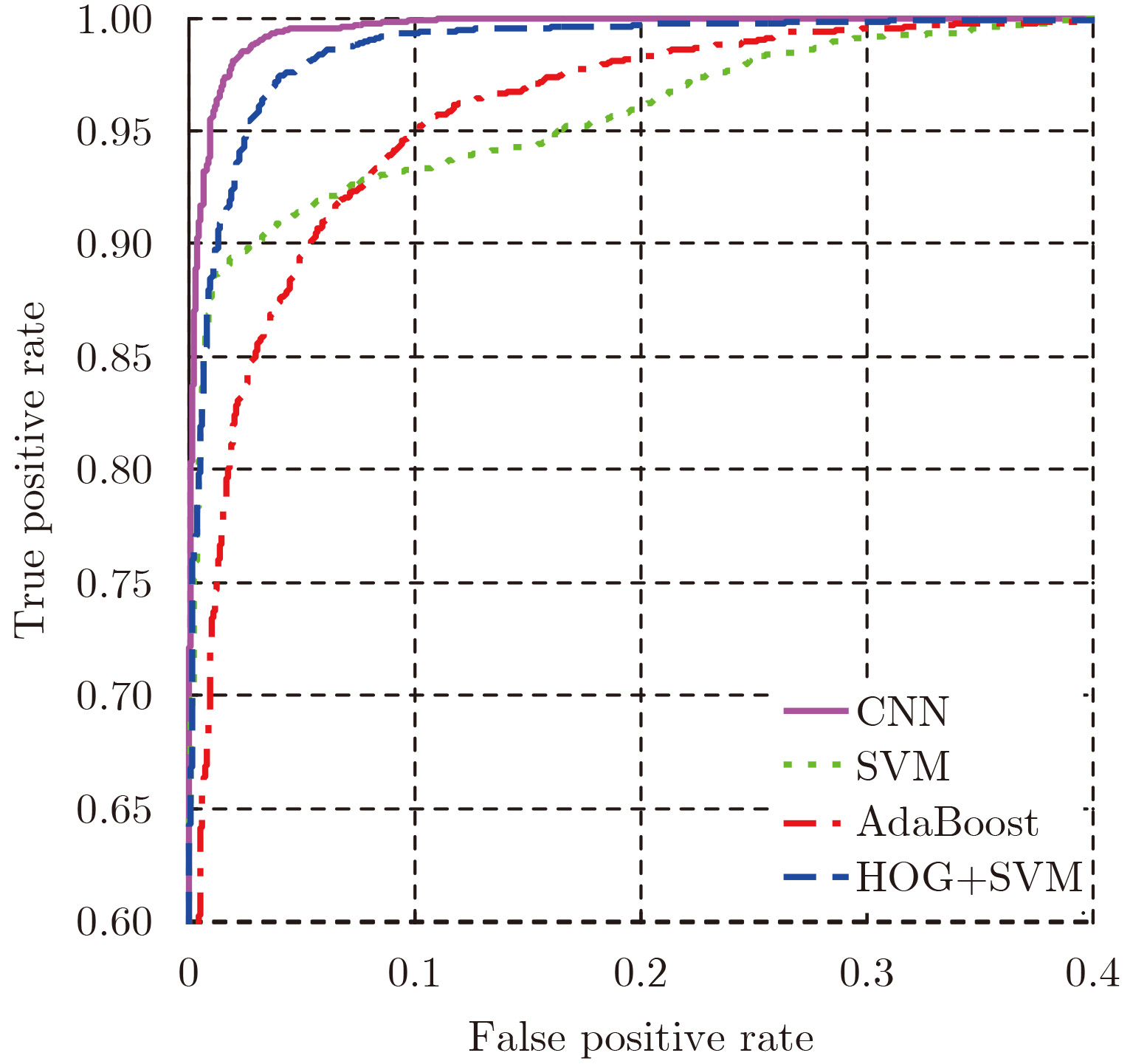
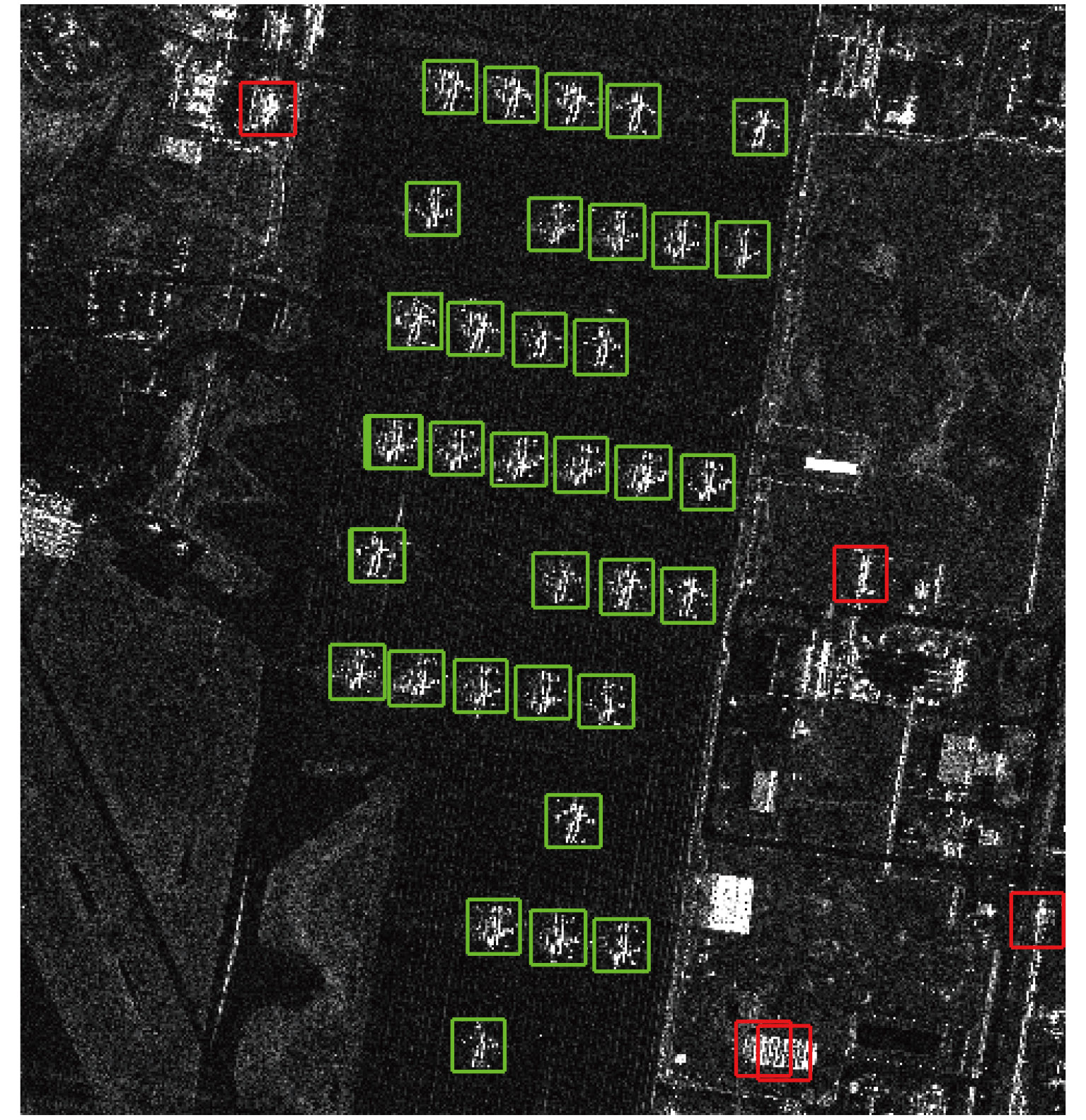
传统的合成孔径雷达(Synthetic Aperture Radar, SAR)图像飞机检测方法一般利用像素对比度信息进行图像分割,从而提取待定目标。然而这些方法只考虑了像素亮度信息而忽视了目标的结构特征,进而导致目标的不精确定位和大量虚警的产生。基于上述问题,该文构建了一个全新的SAR图像飞机目标检测算法框架。首先,针对大场景SAR图像应用需求,提出了改进的显著性预检测方法,从而实现SAR图像候选飞机目标多尺度快速粗定位;然后,设计并调优了含4个权重层的卷积神经网络(Convolutional Neural Network, CNN),实现对候选目标的精确检测和鉴别;最后,因为SAR数据量有限、易导致过拟合,提出4种适用于SAR图像的数据增强方法,具体包括平移、斑点加噪、对比度增强和小角度旋转。实验证实该飞机检测算法在高分辨率TerraSAR-X数据集上效果显著,与传统的SAR飞机检测方法相比,该方法检测效率更高,泛化能力更强。 传统的合成孔径雷达(Synthetic Aperture Radar, SAR)图像飞机检测方法一般利用像素对比度信息进行图像分割,从而提取待定目标。然而这些方法只考虑了像素亮度信息而忽视了目标的结构特征,进而导致目标的不精确定位和大量虚警的产生。基于上述问题,该文构建了一个全新的SAR图像飞机目标检测算法框架。首先,针对大场景SAR图像应用需求,提出了改进的显著性预检测方法,从而实现SAR图像候选飞机目标多尺度快速粗定位;然后,设计并调优了含4个权重层的卷积神经网络(Convolutional Neural Network, CNN),实现对候选目标的精确检测和鉴别;最后,因为SAR数据量有限、易导致过拟合,提出4种适用于SAR图像的数据增强方法,具体包括平移、斑点加噪、对比度增强和小角度旋转。实验证实该飞机检测算法在高分辨率TerraSAR-X数据集上效果显著,与传统的SAR飞机检测方法相比,该方法检测效率更高,泛化能力更强。
传统的合成孔径雷达(Synthetic Aperture Radar, SAR)图像飞机检测方法一般利用像素对比度信息进行图像分割,从而提取待定目标。然而这些方法只考虑了像素亮度信息而忽视了目标的结构特征,进而导致目标的不精确定位和大量虚警的产生。基于上述问题,该文构建了一个全新的SAR图像飞机目标检测算法框架。首先,针对大场景SAR图像应用需求,提出了改进的显著性预检测方法,从而实现SAR图像候选飞机目标多尺度快速粗定位;然后,设计并调优了含4个权重层的卷积神经网络(Convolutional Neural Network, CNN),实现对候选目标的精确检测和鉴别;最后,因为SAR数据量有限、易导致过拟合,提出4种适用于SAR图像的数据增强方法,具体包括平移、斑点加噪、对比度增强和小角度旋转。实验证实该飞机检测算法在高分辨率TerraSAR-X数据集上效果显著,与传统的SAR飞机检测方法相比,该方法检测效率更高,泛化能力更强。 传统的合成孔径雷达(Synthetic Aperture Radar, SAR)图像飞机检测方法一般利用像素对比度信息进行图像分割,从而提取待定目标。然而这些方法只考虑了像素亮度信息而忽视了目标的结构特征,进而导致目标的不精确定位和大量虚警的产生。基于上述问题,该文构建了一个全新的SAR图像飞机目标检测算法框架。首先,针对大场景SAR图像应用需求,提出了改进的显著性预检测方法,从而实现SAR图像候选飞机目标多尺度快速粗定位;然后,设计并调优了含4个权重层的卷积神经网络(Convolutional Neural Network, CNN),实现对候选目标的精确检测和鉴别;最后,因为SAR数据量有限、易导致过拟合,提出4种适用于SAR图像的数据增强方法,具体包括平移、斑点加噪、对比度增强和小角度旋转。实验证实该飞机检测算法在高分辨率TerraSAR-X数据集上效果显著,与传统的SAR飞机检测方法相比,该方法检测效率更高,泛化能力更强。





2017, 6(2): 204-212.
摘要:
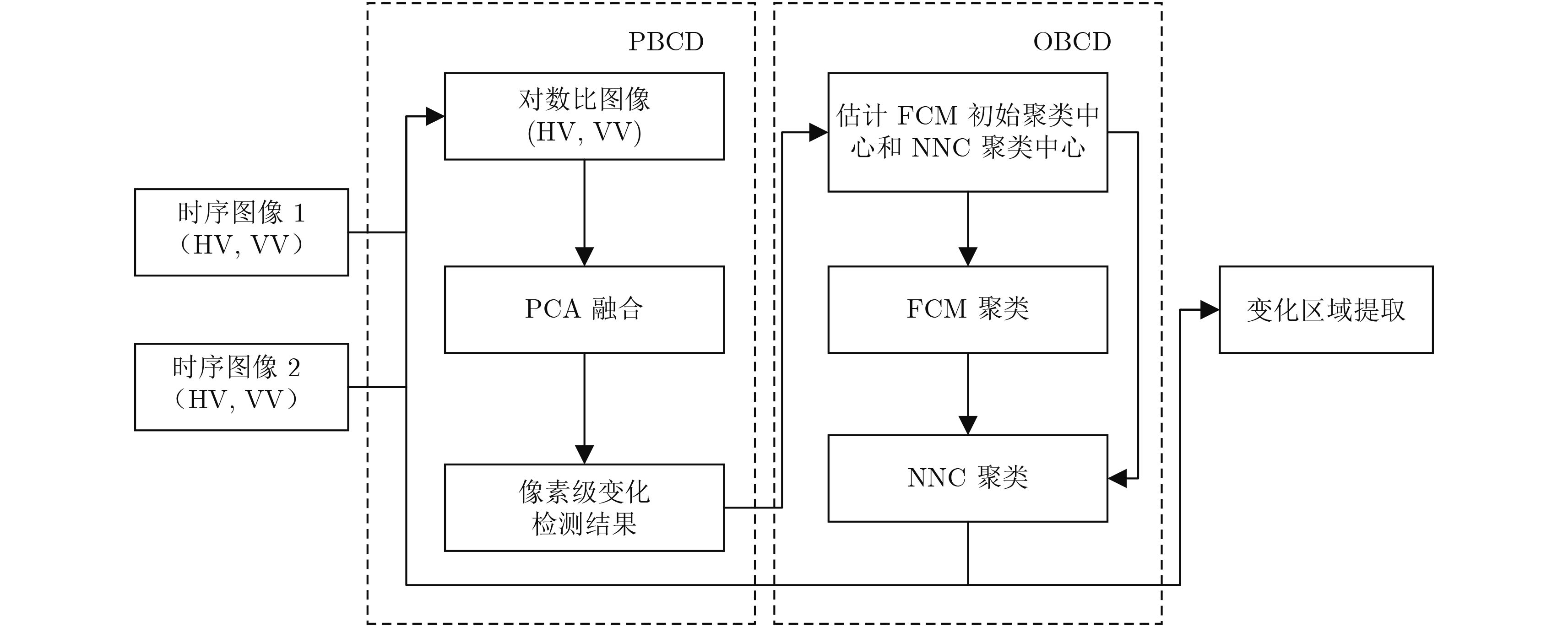
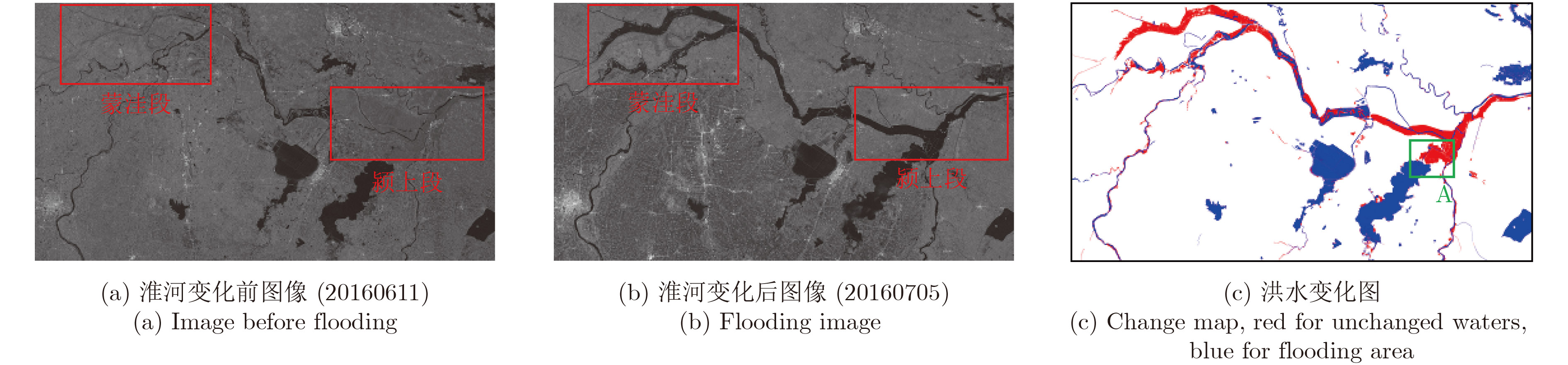
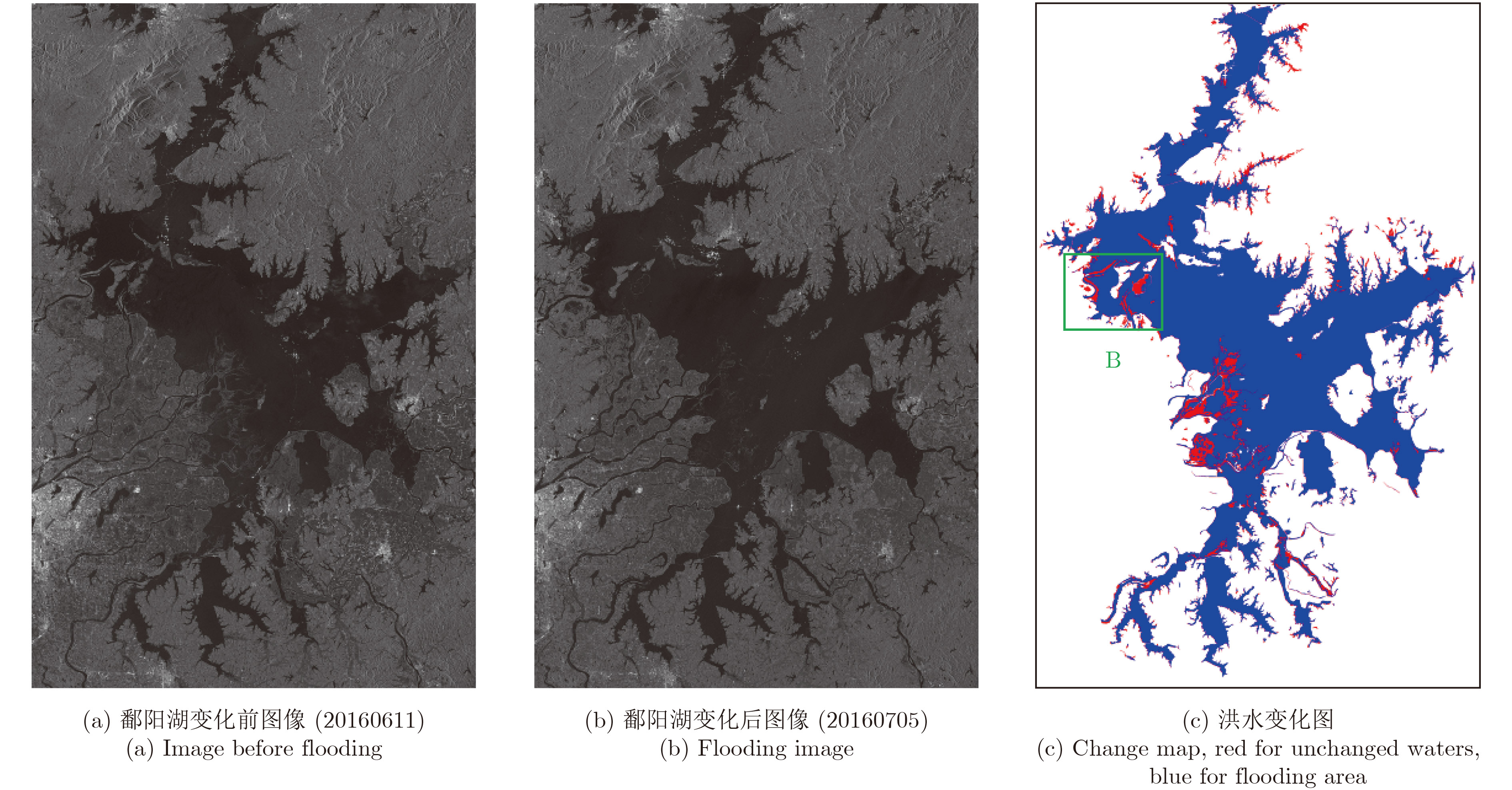
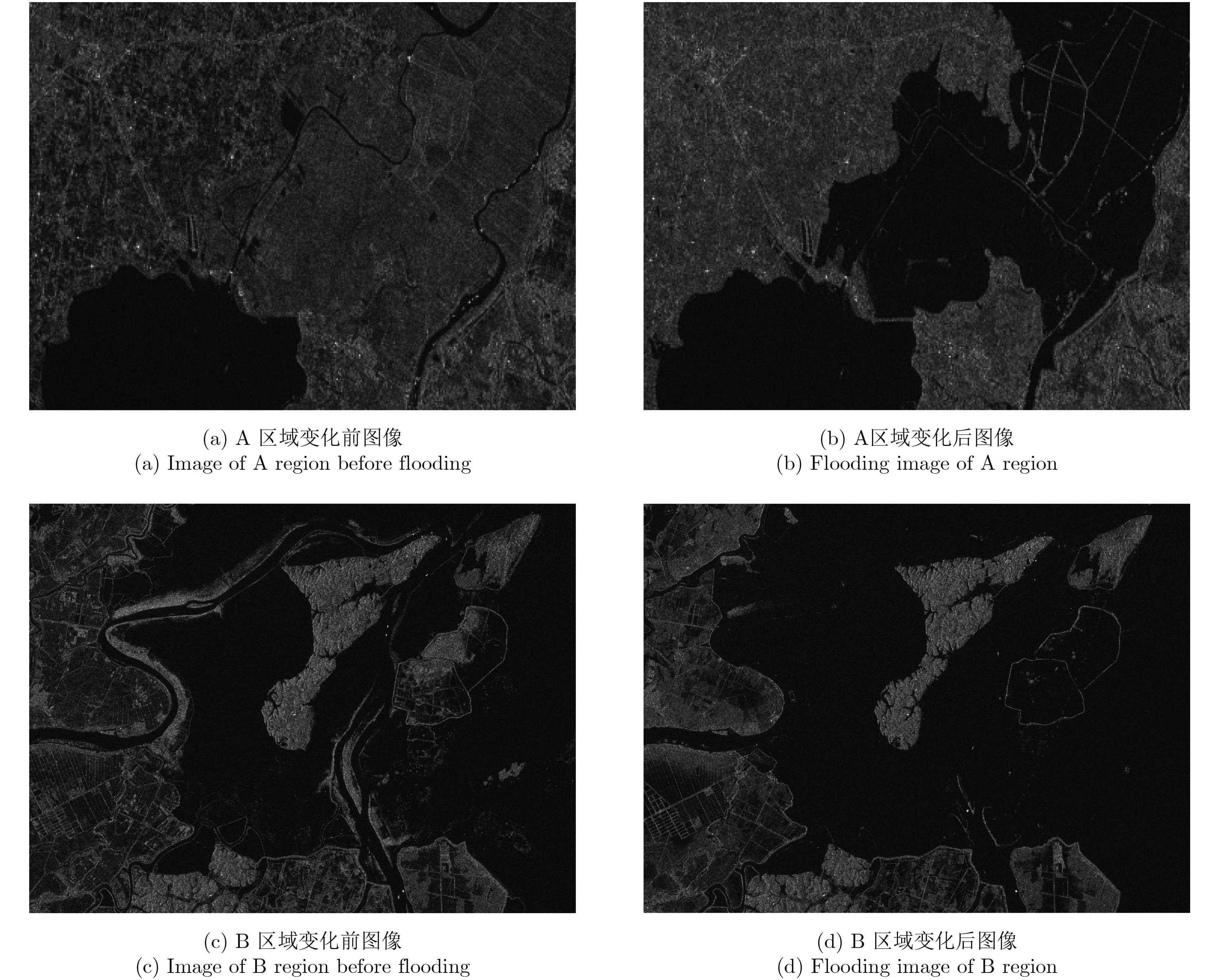
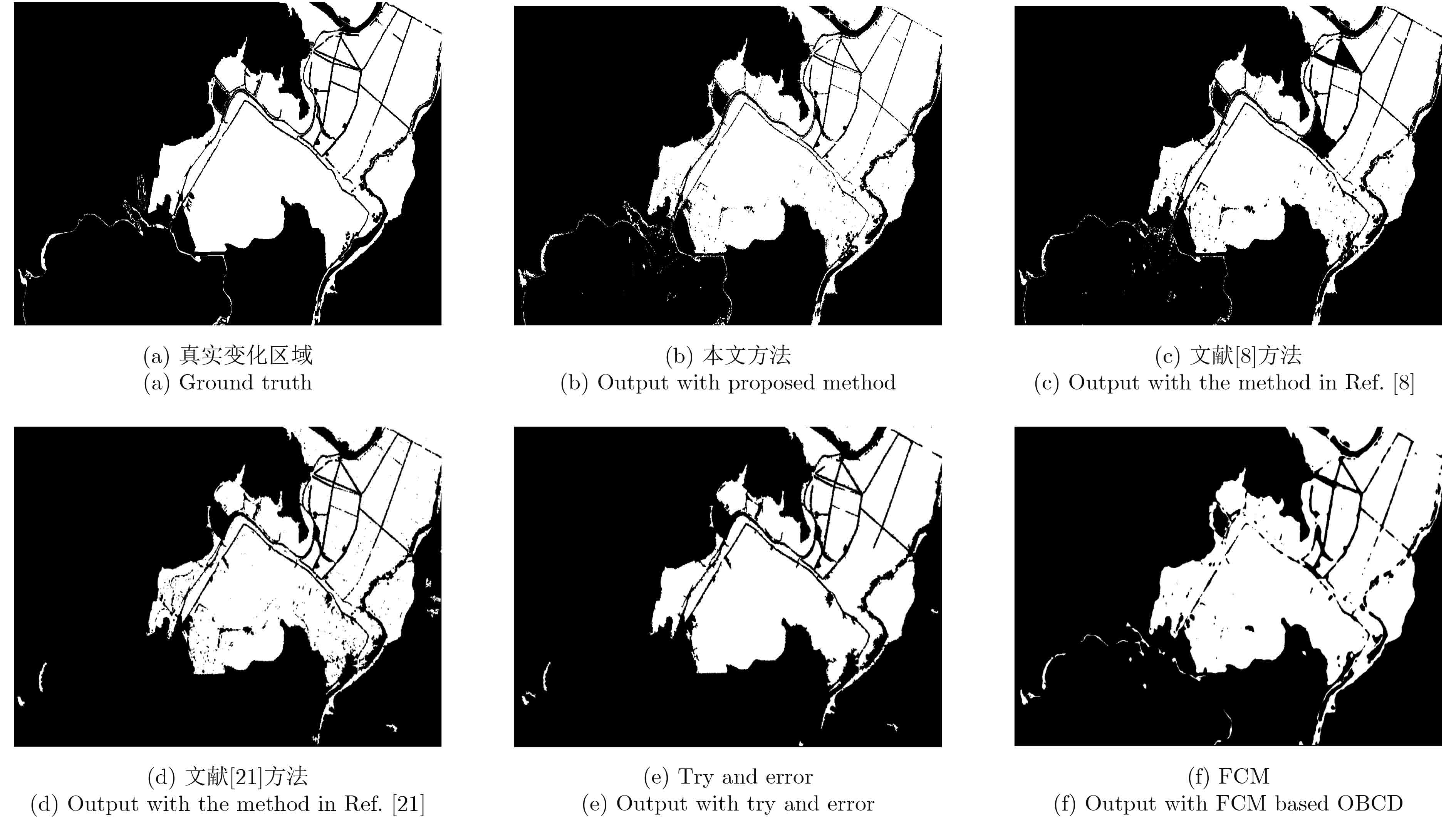
针对多时相合成孔径雷达(Synthetic Aperture Radar, SAR)图像的变化检测,该文提出一种改进的混合变化检测方法来提高检测精度。该方法首先采用基于像素级的变化检测方法提取初始变化区域,并以此估计初始聚类中心;然后采用模糊聚类(FCM)将变化前后SAR图像分为3类,即水体区域、背景区域、过渡区域;接着采用最近距离聚类(NNC)将过渡区域像素进一步划分为水体和背景两部分,合并所有水体像素,实现洪水区域的提取。最后得到的洪水区域差异图即为最终的变化检测结果。该文采用Sentinel-1A获取的淮河与鄱阳湖水域数据进行算法验证,实验表明,该文方法的检测率较高,且总体误差较低。 针对多时相合成孔径雷达(Synthetic Aperture Radar, SAR)图像的变化检测,该文提出一种改进的混合变化检测方法来提高检测精度。该方法首先采用基于像素级的变化检测方法提取初始变化区域,并以此估计初始聚类中心;然后采用模糊聚类(FCM)将变化前后SAR图像分为3类,即水体区域、背景区域、过渡区域;接着采用最近距离聚类(NNC)将过渡区域像素进一步划分为水体和背景两部分,合并所有水体像素,实现洪水区域的提取。最后得到的洪水区域差异图即为最终的变化检测结果。该文采用Sentinel-1A获取的淮河与鄱阳湖水域数据进行算法验证,实验表明,该文方法的检测率较高,且总体误差较低。
针对多时相合成孔径雷达(Synthetic Aperture Radar, SAR)图像的变化检测,该文提出一种改进的混合变化检测方法来提高检测精度。该方法首先采用基于像素级的变化检测方法提取初始变化区域,并以此估计初始聚类中心;然后采用模糊聚类(FCM)将变化前后SAR图像分为3类,即水体区域、背景区域、过渡区域;接着采用最近距离聚类(NNC)将过渡区域像素进一步划分为水体和背景两部分,合并所有水体像素,实现洪水区域的提取。最后得到的洪水区域差异图即为最终的变化检测结果。该文采用Sentinel-1A获取的淮河与鄱阳湖水域数据进行算法验证,实验表明,该文方法的检测率较高,且总体误差较低。 针对多时相合成孔径雷达(Synthetic Aperture Radar, SAR)图像的变化检测,该文提出一种改进的混合变化检测方法来提高检测精度。该方法首先采用基于像素级的变化检测方法提取初始变化区域,并以此估计初始聚类中心;然后采用模糊聚类(FCM)将变化前后SAR图像分为3类,即水体区域、背景区域、过渡区域;接着采用最近距离聚类(NNC)将过渡区域像素进一步划分为水体和背景两部分,合并所有水体像素,实现洪水区域的提取。最后得到的洪水区域差异图即为最终的变化检测结果。该文采用Sentinel-1A获取的淮河与鄱阳湖水域数据进行算法验证,实验表明,该文方法的检测率较高,且总体误差较低。


2017, 6(2): 213-220.
摘要:
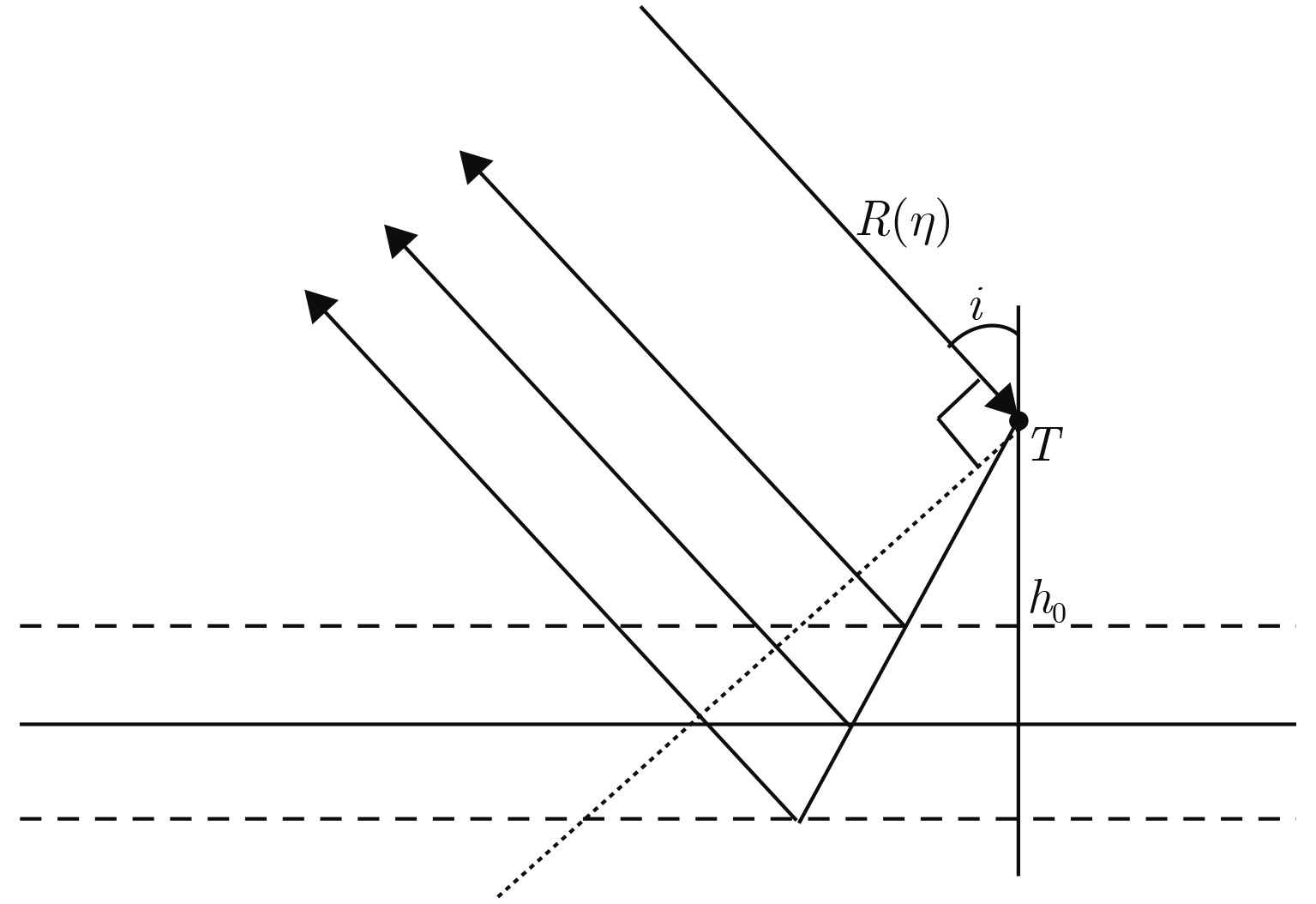
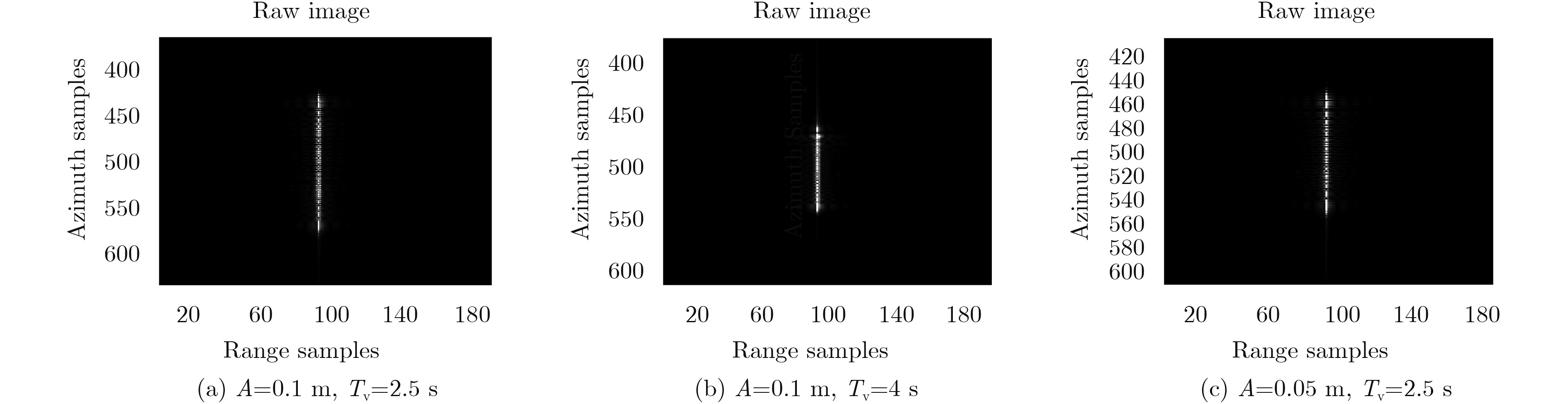
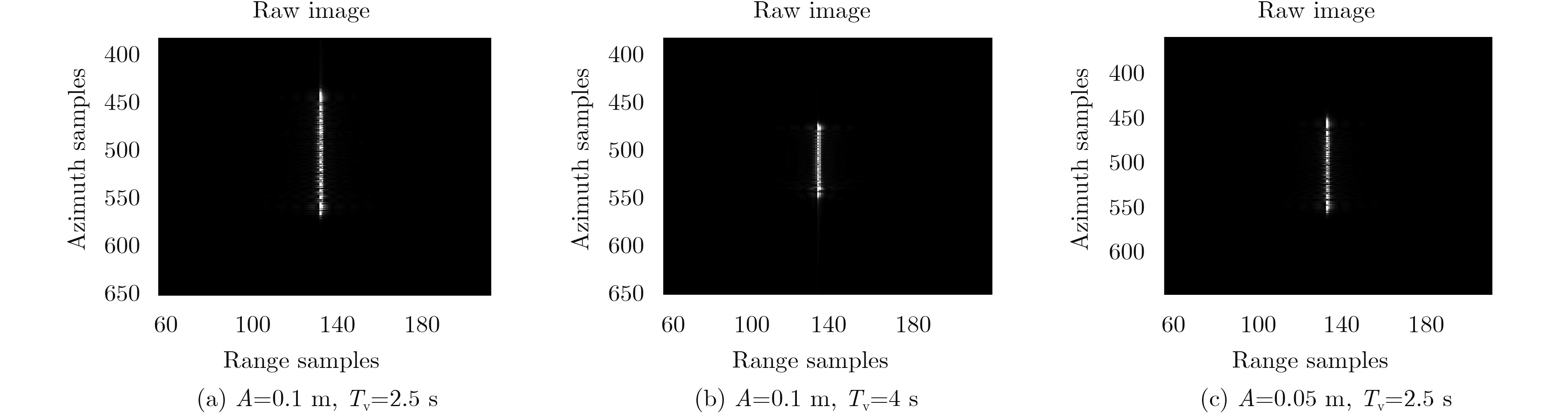
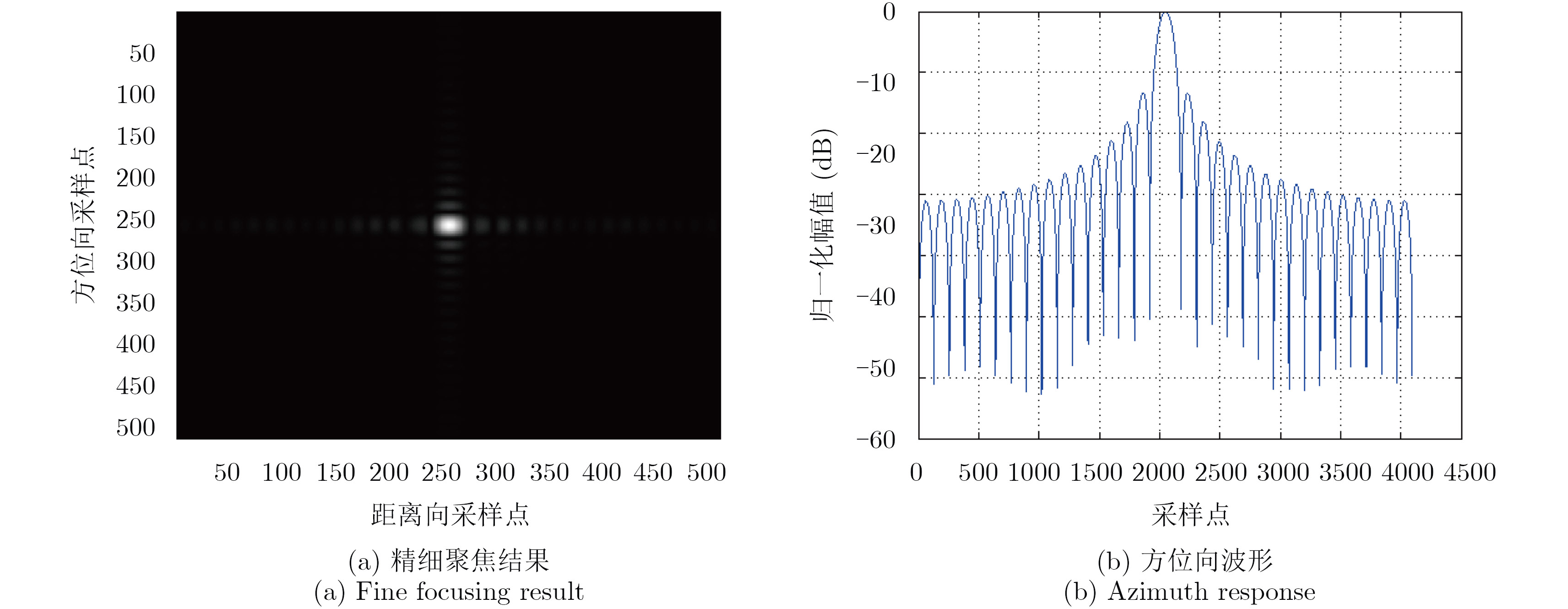
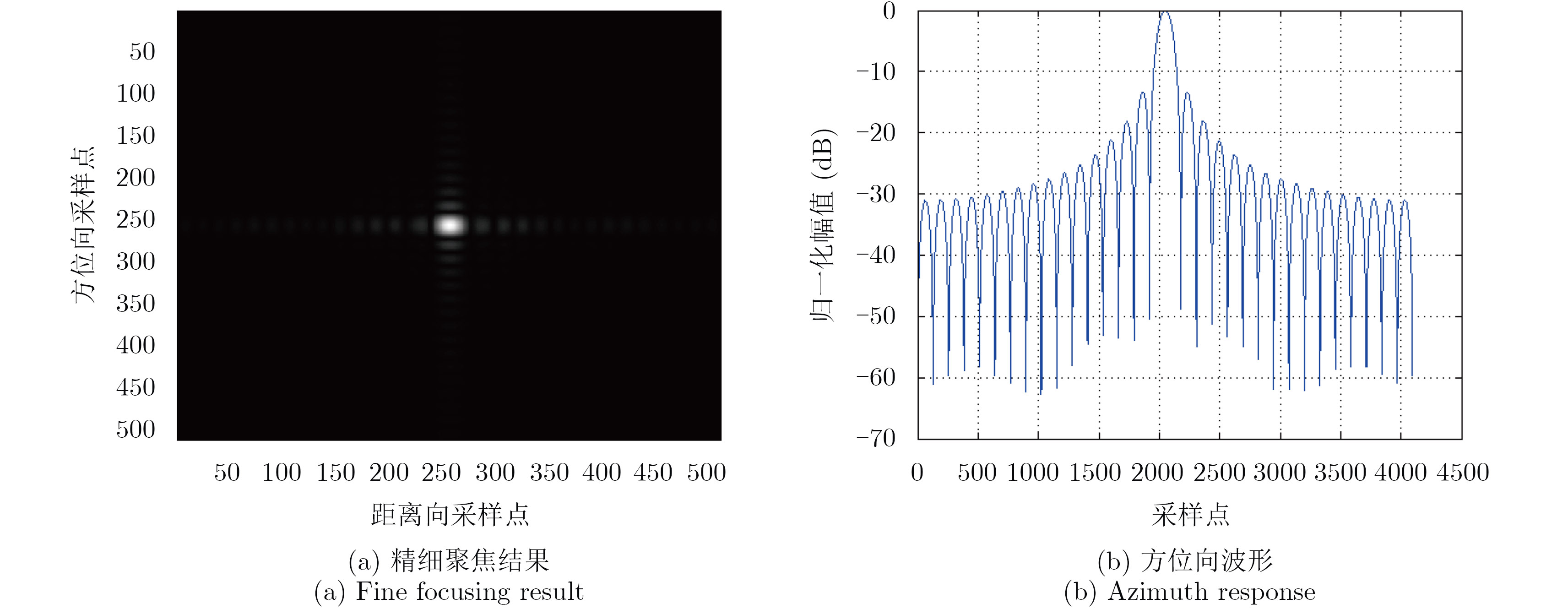
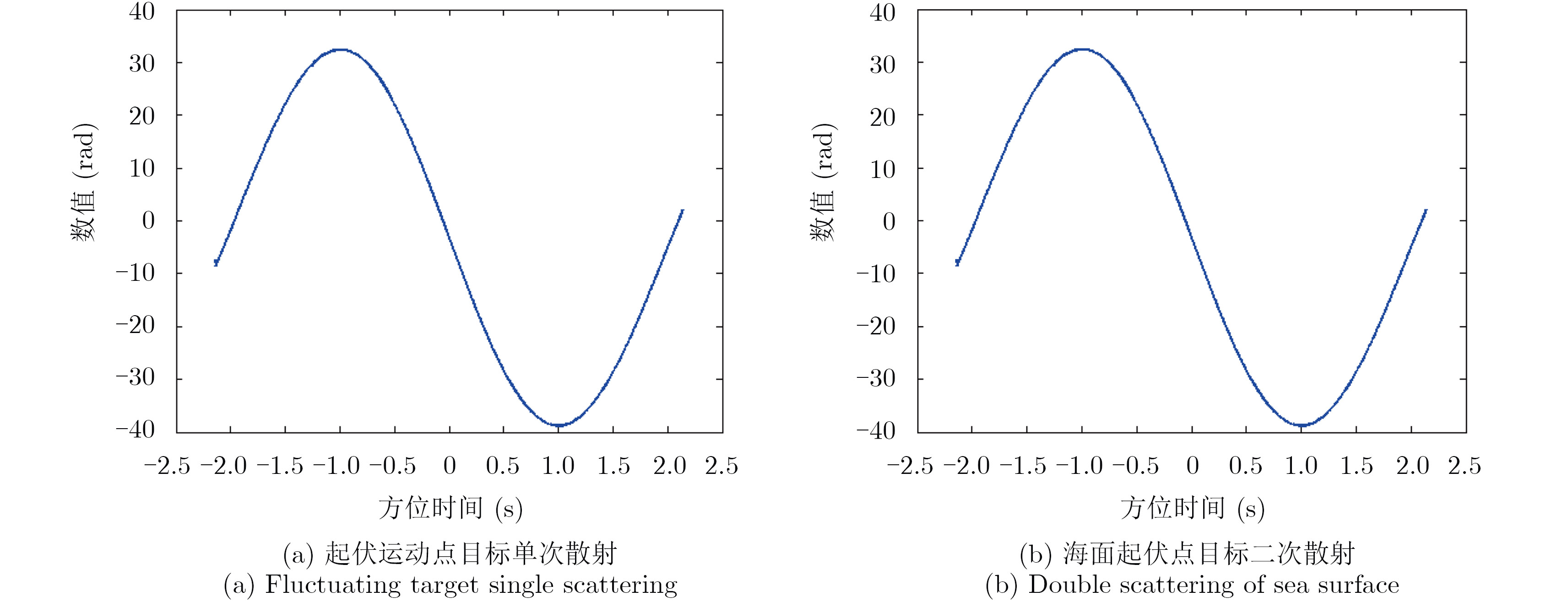
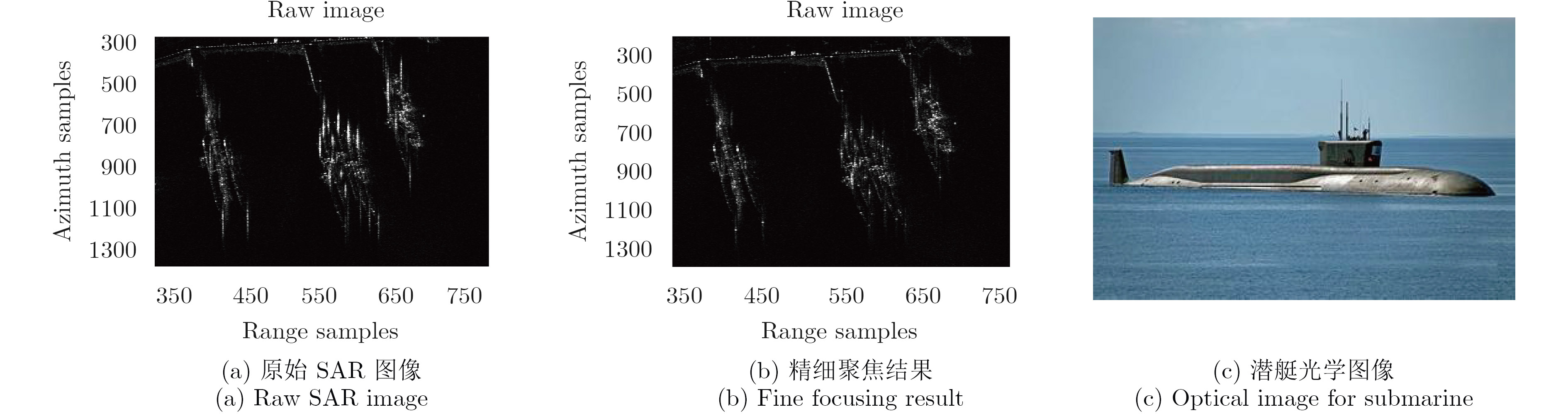
高分辨率星载SAR图像中目标的复杂运动将引起不可忽视的散焦现象,影响目标识别和解译。该文对高分辨率星载SAR中目标起伏运动引入的误差进行了定量化分析,并仿真了其在SAR图像中的成像特点,提出了一种基于星载复图像数据进行运动误差补偿和精细聚焦处理的方法,同时估计得到目标的运动参数和海浪信息。仿真实验和TerraSAR-X港口区域实际数据实验验证了该方法的有效性和正确性。 高分辨率星载SAR图像中目标的复杂运动将引起不可忽视的散焦现象,影响目标识别和解译。该文对高分辨率星载SAR中目标起伏运动引入的误差进行了定量化分析,并仿真了其在SAR图像中的成像特点,提出了一种基于星载复图像数据进行运动误差补偿和精细聚焦处理的方法,同时估计得到目标的运动参数和海浪信息。仿真实验和TerraSAR-X港口区域实际数据实验验证了该方法的有效性和正确性。
高分辨率星载SAR图像中目标的复杂运动将引起不可忽视的散焦现象,影响目标识别和解译。该文对高分辨率星载SAR中目标起伏运动引入的误差进行了定量化分析,并仿真了其在SAR图像中的成像特点,提出了一种基于星载复图像数据进行运动误差补偿和精细聚焦处理的方法,同时估计得到目标的运动参数和海浪信息。仿真实验和TerraSAR-X港口区域实际数据实验验证了该方法的有效性和正确性。 高分辨率星载SAR图像中目标的复杂运动将引起不可忽视的散焦现象,影响目标识别和解译。该文对高分辨率星载SAR中目标起伏运动引入的误差进行了定量化分析,并仿真了其在SAR图像中的成像特点,提出了一种基于星载复图像数据进行运动误差补偿和精细聚焦处理的方法,同时估计得到目标的运动参数和海浪信息。仿真实验和TerraSAR-X港口区域实际数据实验验证了该方法的有效性和正确性。





2017, 6(2): 221-228.
摘要:
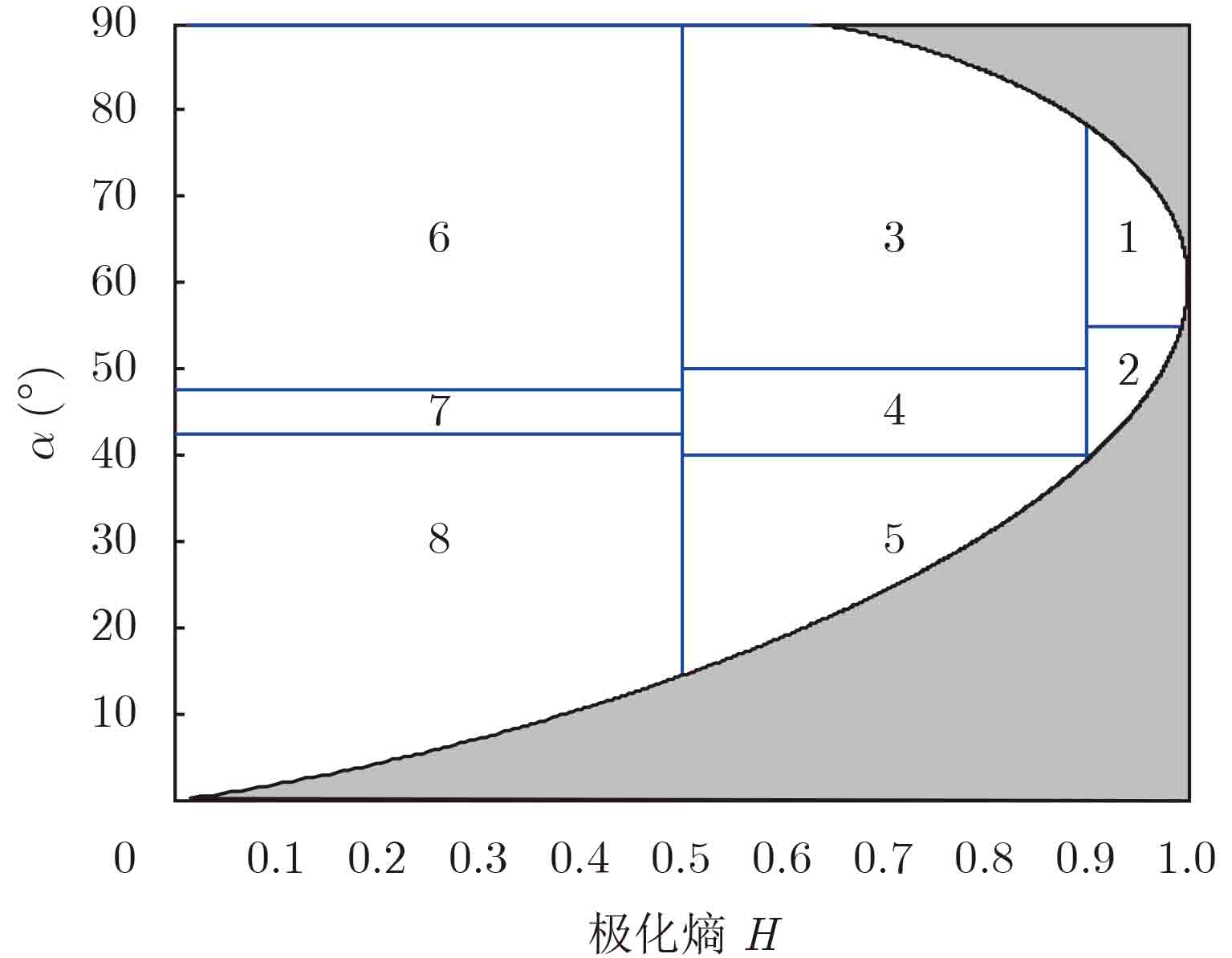
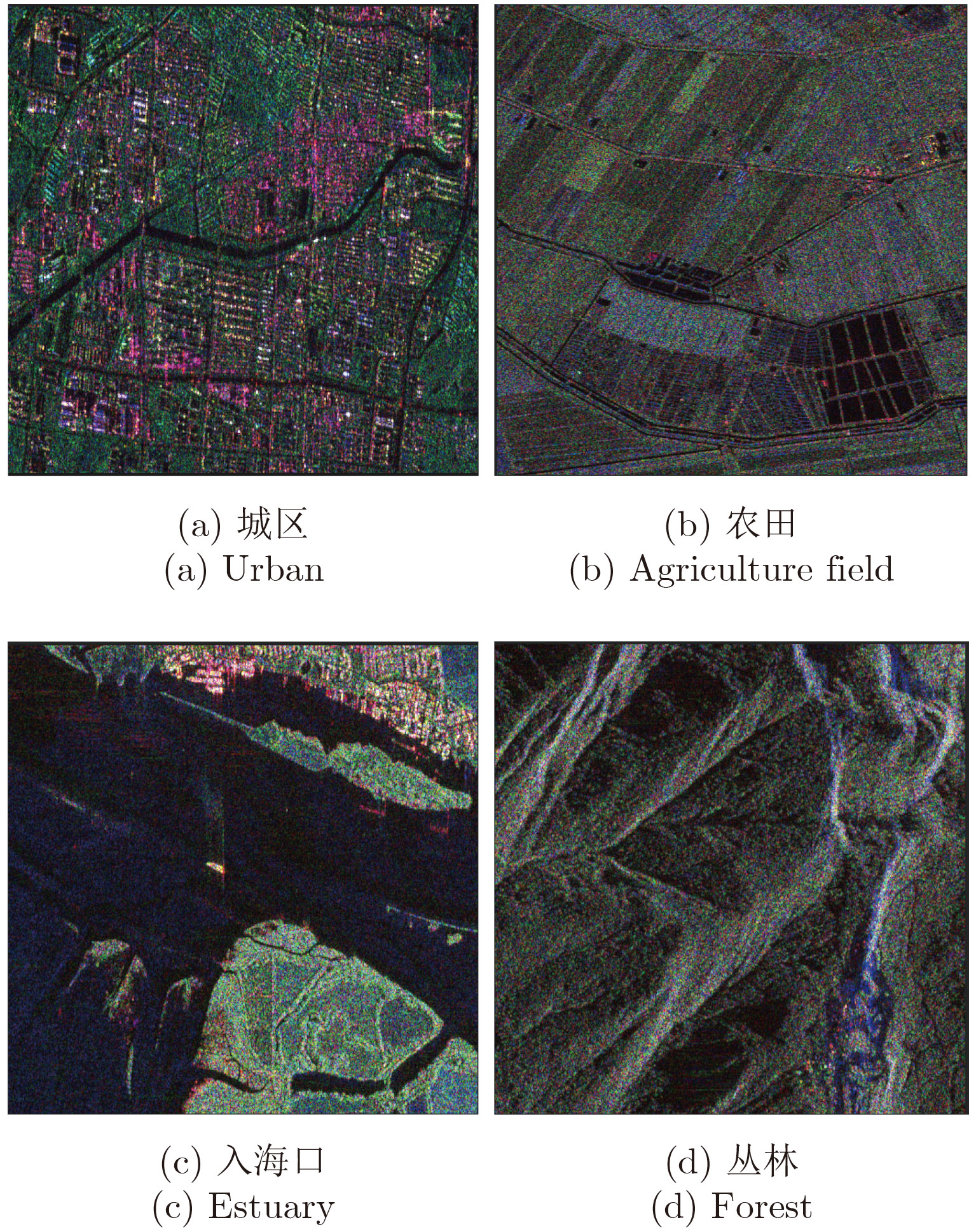
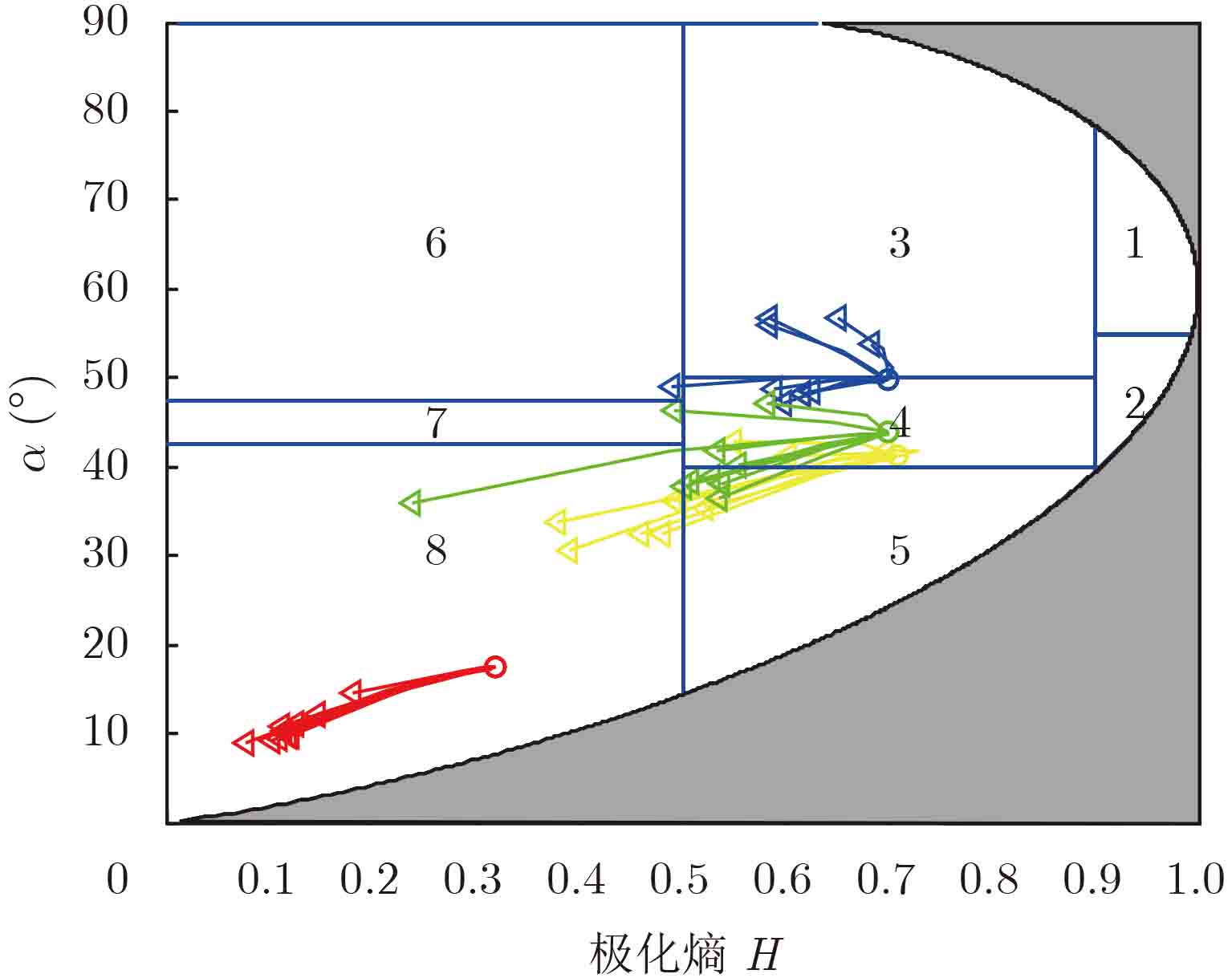
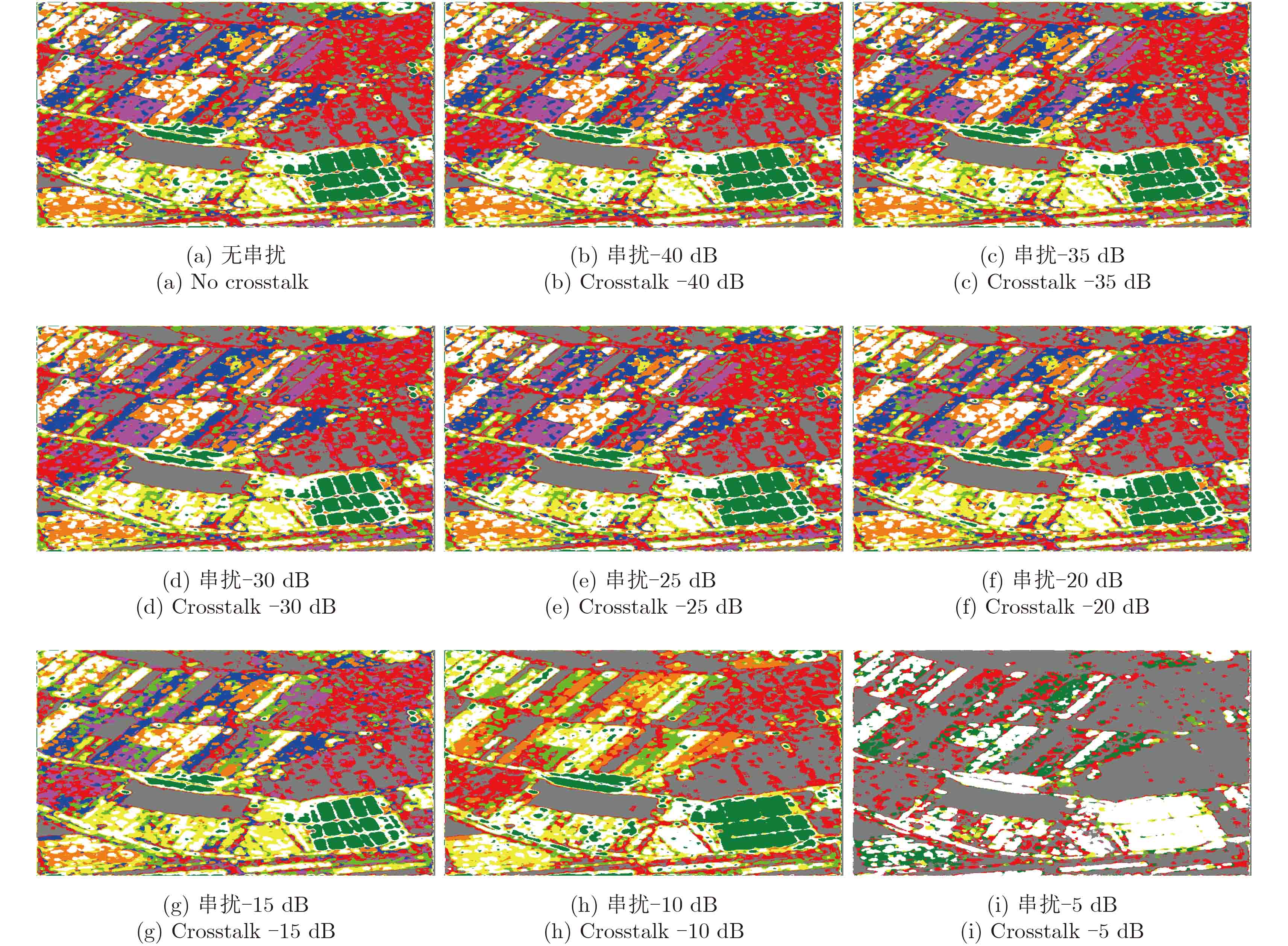
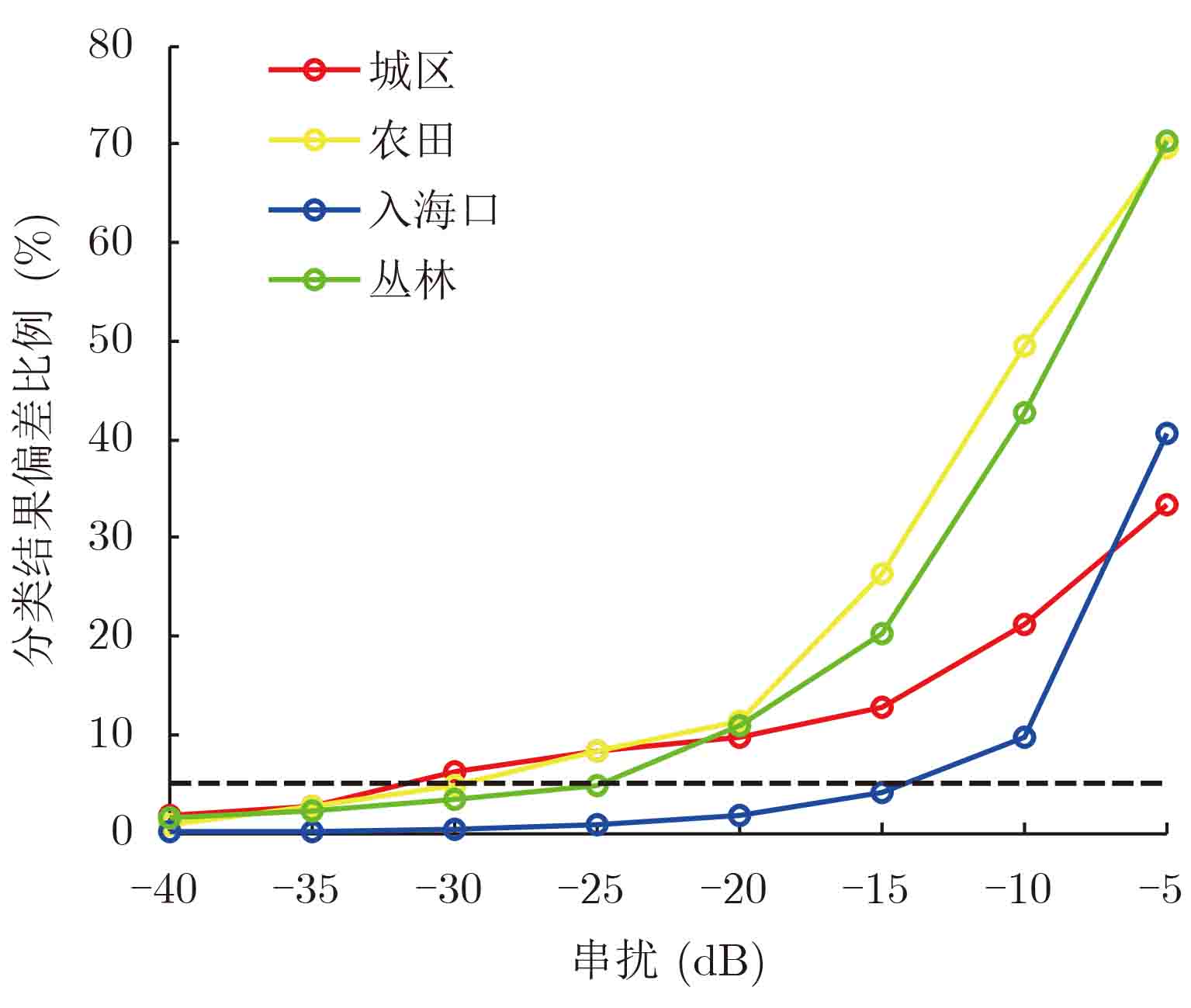
串扰是极化SAR系统的主要误差源之一,也是用于衡量极化定标质量的参考指标。为研究系统串扰在具体地物分类应用中的影响,该文首先推导了串扰量作用于由Cloude分解获得的地物散射机制特征量的数学表达,并利用不同类型的实际Radarsat-2数据通过半物理仿真,验证理论分析结果。最后在实验数据上进行基于Cloude分解的H/a/Wishart非监督分类,从各类图像分类偏差比率随串扰的变化曲线中,获得满足应用需求的串扰量指标。 串扰是极化SAR系统的主要误差源之一,也是用于衡量极化定标质量的参考指标。为研究系统串扰在具体地物分类应用中的影响,该文首先推导了串扰量作用于由Cloude分解获得的地物散射机制特征量的数学表达,并利用不同类型的实际Radarsat-2数据通过半物理仿真,验证理论分析结果。最后在实验数据上进行基于Cloude分解的H/a/Wishart非监督分类,从各类图像分类偏差比率随串扰的变化曲线中,获得满足应用需求的串扰量指标。
串扰是极化SAR系统的主要误差源之一,也是用于衡量极化定标质量的参考指标。为研究系统串扰在具体地物分类应用中的影响,该文首先推导了串扰量作用于由Cloude分解获得的地物散射机制特征量的数学表达,并利用不同类型的实际Radarsat-2数据通过半物理仿真,验证理论分析结果。最后在实验数据上进行基于Cloude分解的H/a/Wishart非监督分类,从各类图像分类偏差比率随串扰的变化曲线中,获得满足应用需求的串扰量指标。 串扰是极化SAR系统的主要误差源之一,也是用于衡量极化定标质量的参考指标。为研究系统串扰在具体地物分类应用中的影响,该文首先推导了串扰量作用于由Cloude分解获得的地物散射机制特征量的数学表达,并利用不同类型的实际Radarsat-2数据通过半物理仿真,验证理论分析结果。最后在实验数据上进行基于Cloude分解的H/a/Wishart非监督分类,从各类图像分类偏差比率随串扰的变化曲线中,获得满足应用需求的串扰量指标。

 微信 | 公众平台
微信 | 公众平台 

