
 Submit Manuscript
Submit Manuscript Peer Review
Peer Review Editor Work
Editor Work2020 Vol. 9, No. 5
 Previous Issue
Previous Issue
 Abstract
Abstract 1463KB
1463KB























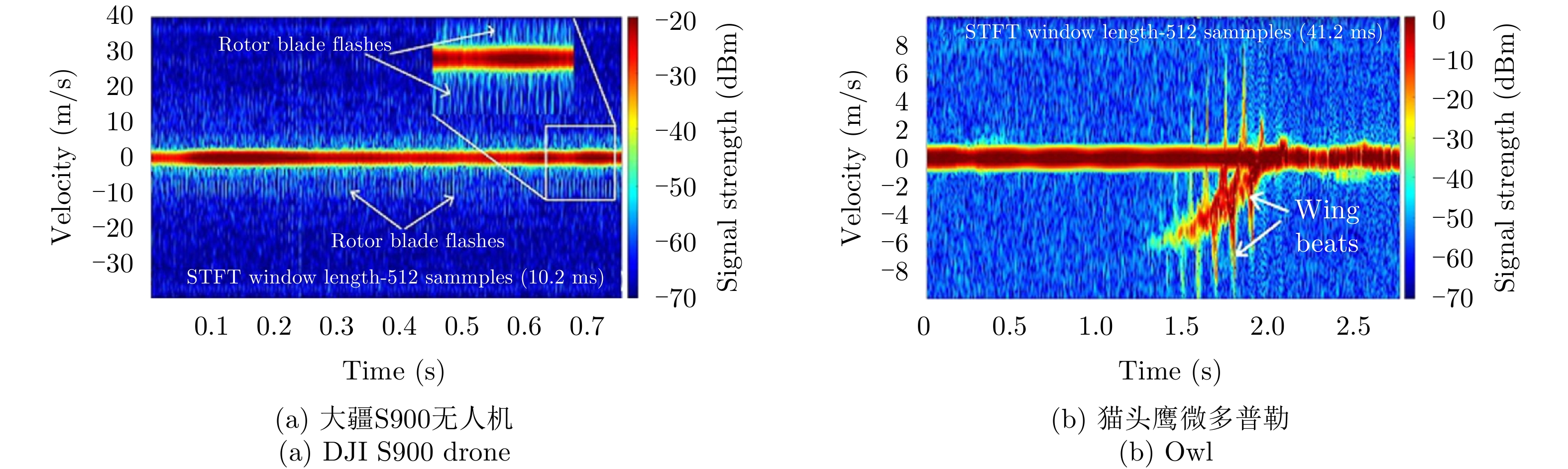
Flying birds and Unmanned Aerial Vehicles (UAVs) are typical “low, slow, and small” targets with low observability. The need for effective monitoring and identification of these two targets has become urgent and must be solved to ensure the safety of air routes and urban areas. There are many types of flying birds and UAVs that are characterized by low flying heights, strong maneuverability, small radar cross-sectional areas, and complicated detection environments, which are posing great challenges in target detection worldwide. “Visible (high detection ability) and clear-cut (high recognition probability)” methods and technologies must be developed that can finely describe and recognize UAVs, flying birds, and “low-slow-small” targets. This paper reviews the recent progress in research on detection and recognition technologies for rotor UAVs and flying birds in complex scenes and discusses effective detection and recognition methods for the detection of birds and drones, including echo modeling and recognition of fretting characteristics, the enhancement and extraction of maneuvering features in ubiquitous observation mode, distributed multi-view features fusion, differences in motion trajectories, and intelligent classification via deep learning. Lastly, the problems of existing research approaches are summarized, and we consider the future development prospects of target detection and recognition technologies for flying birds and UAVs in complex scenarios.
Flying birds and Unmanned Aerial Vehicles (UAVs) are typical “low, slow, and small” targets with low observability. The need for effective monitoring and identification of these two targets has become urgent and must be solved to ensure the safety of air routes and urban areas. There are many types of flying birds and UAVs that are characterized by low flying heights, strong maneuverability, small radar cross-sectional areas, and complicated detection environments, which are posing great challenges in target detection worldwide. “Visible (high detection ability) and clear-cut (high recognition probability)” methods and technologies must be developed that can finely describe and recognize UAVs, flying birds, and “low-slow-small” targets. This paper reviews the recent progress in research on detection and recognition technologies for rotor UAVs and flying birds in complex scenes and discusses effective detection and recognition methods for the detection of birds and drones, including echo modeling and recognition of fretting characteristics, the enhancement and extraction of maneuvering features in ubiquitous observation mode, distributed multi-view features fusion, differences in motion trajectories, and intelligent classification via deep learning. Lastly, the problems of existing research approaches are summarized, and we consider the future development prospects of target detection and recognition technologies for flying birds and UAVs in complex scenarios.















































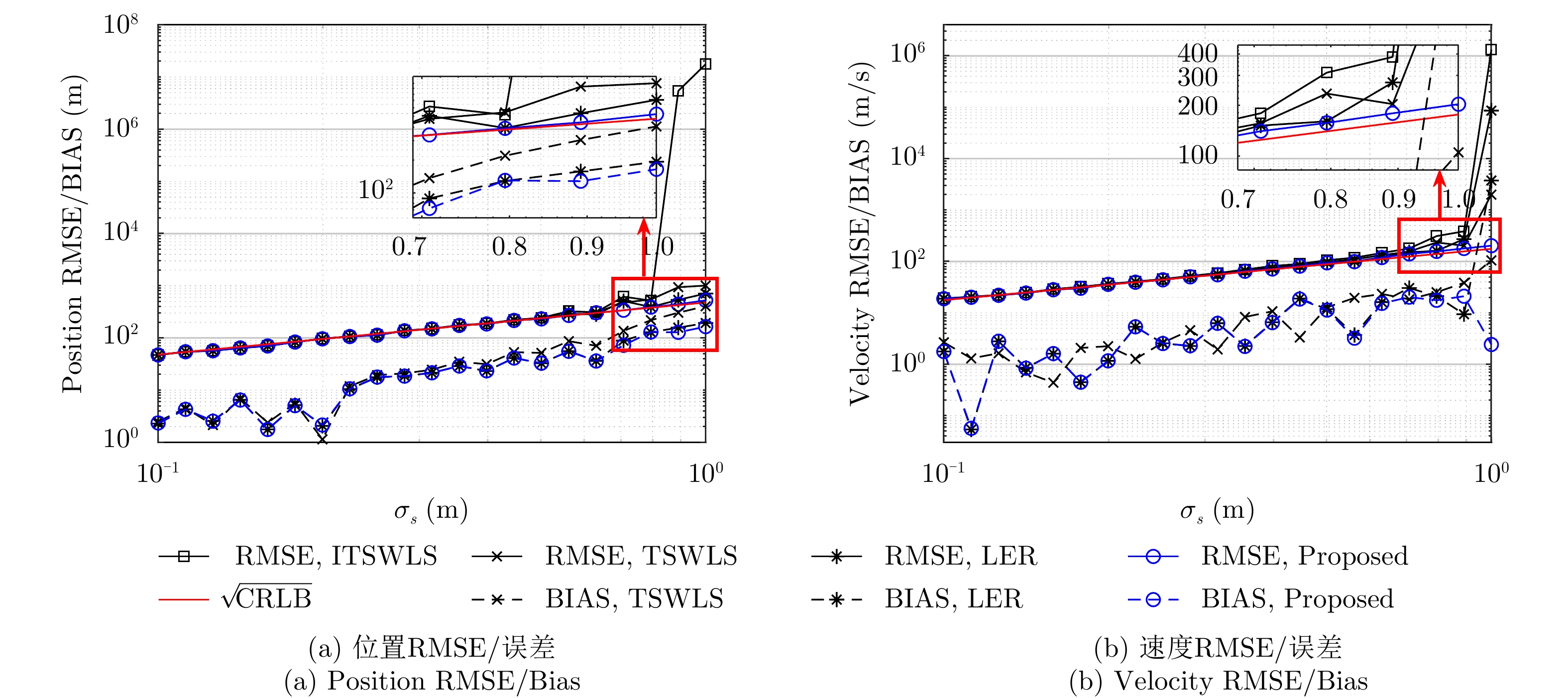
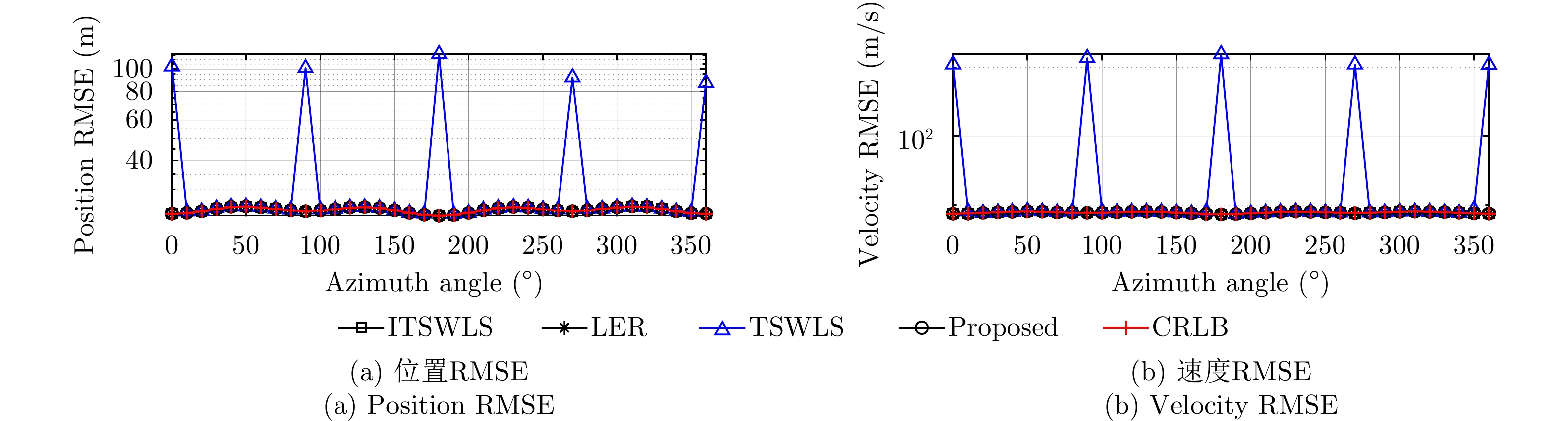
To address the low location accuracy and poor robustness of existing methods, error correction to improve the Stage 2 of the original Two-Stage Weighted Least Squares (TSWLS)-based methods is proposed, which involves a robust moving source localization method with high accuracy based on Time Difference Of Arrival (TDOA) and Frequency Difference Of Arrival (FDOA) in the presence of receiver location errors. This newly proposed Stage 2 performs Taylor expansion on the nuisance variables introduced in Stage 1 to construct the error correction equation, thereby avoiding the rank deficiency problem and nonlinear mathematical operations in the original TSWLS-based methods; and improving the robustness and location accuracy of the method. Theoretical analysis indicates that the proposed method can attain the Cramer-Rao Lower Bound (CRLB) under small noise condition. Simulation results show the proposed method has stronger localization robustness and better anti-noise performance over the existing methods under the common level of receiver location and measurement error.
To address the low location accuracy and poor robustness of existing methods, error correction to improve the Stage 2 of the original Two-Stage Weighted Least Squares (TSWLS)-based methods is proposed, which involves a robust moving source localization method with high accuracy based on Time Difference Of Arrival (TDOA) and Frequency Difference Of Arrival (FDOA) in the presence of receiver location errors. This newly proposed Stage 2 performs Taylor expansion on the nuisance variables introduced in Stage 1 to construct the error correction equation, thereby avoiding the rank deficiency problem and nonlinear mathematical operations in the original TSWLS-based methods; and improving the robustness and location accuracy of the method. Theoretical analysis indicates that the proposed method can attain the Cramer-Rao Lower Bound (CRLB) under small noise condition. Simulation results show the proposed method has stronger localization robustness and better anti-noise performance over the existing methods under the common level of receiver location and measurement error.







 微信 | 公众平台
微信 | 公众平台 

