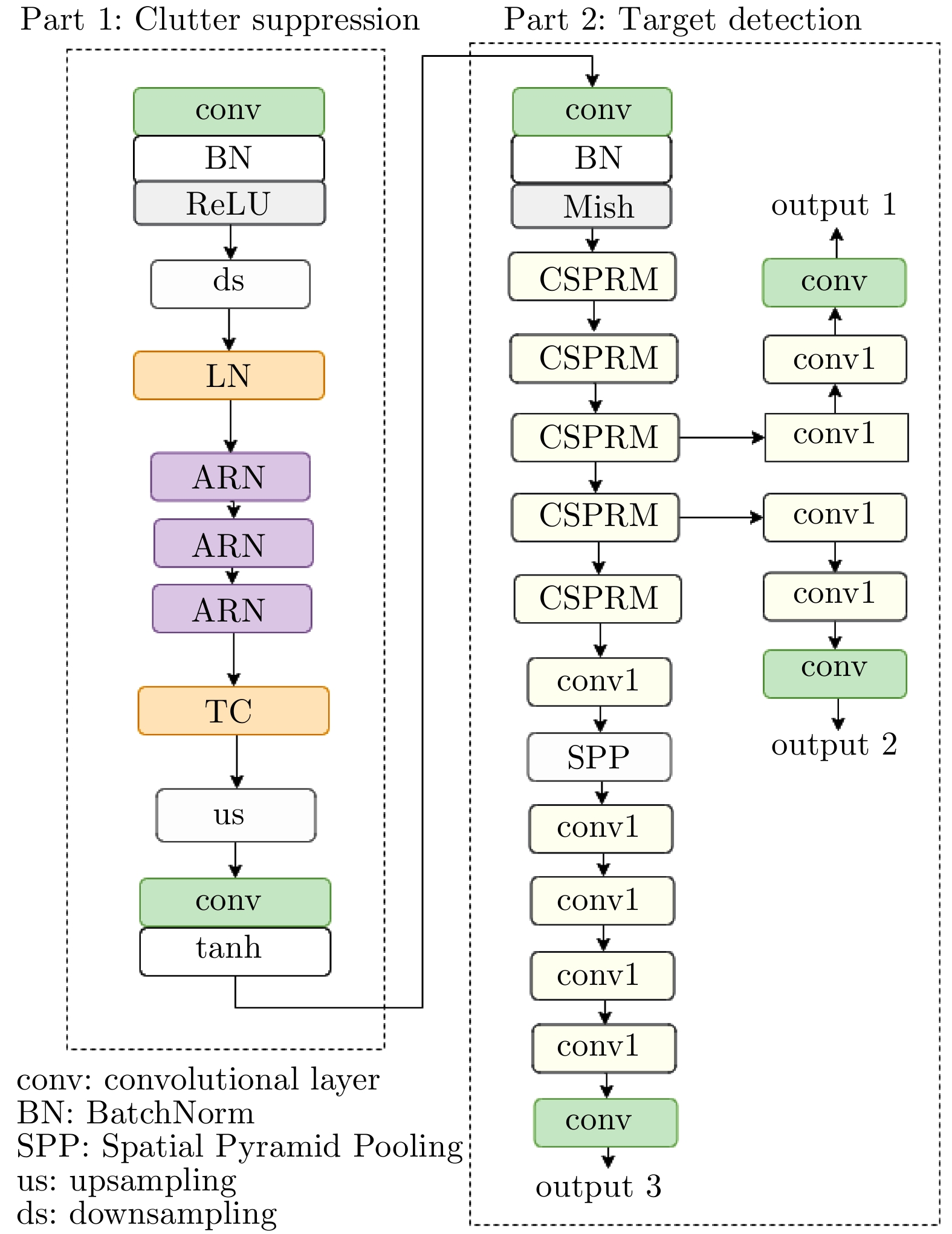
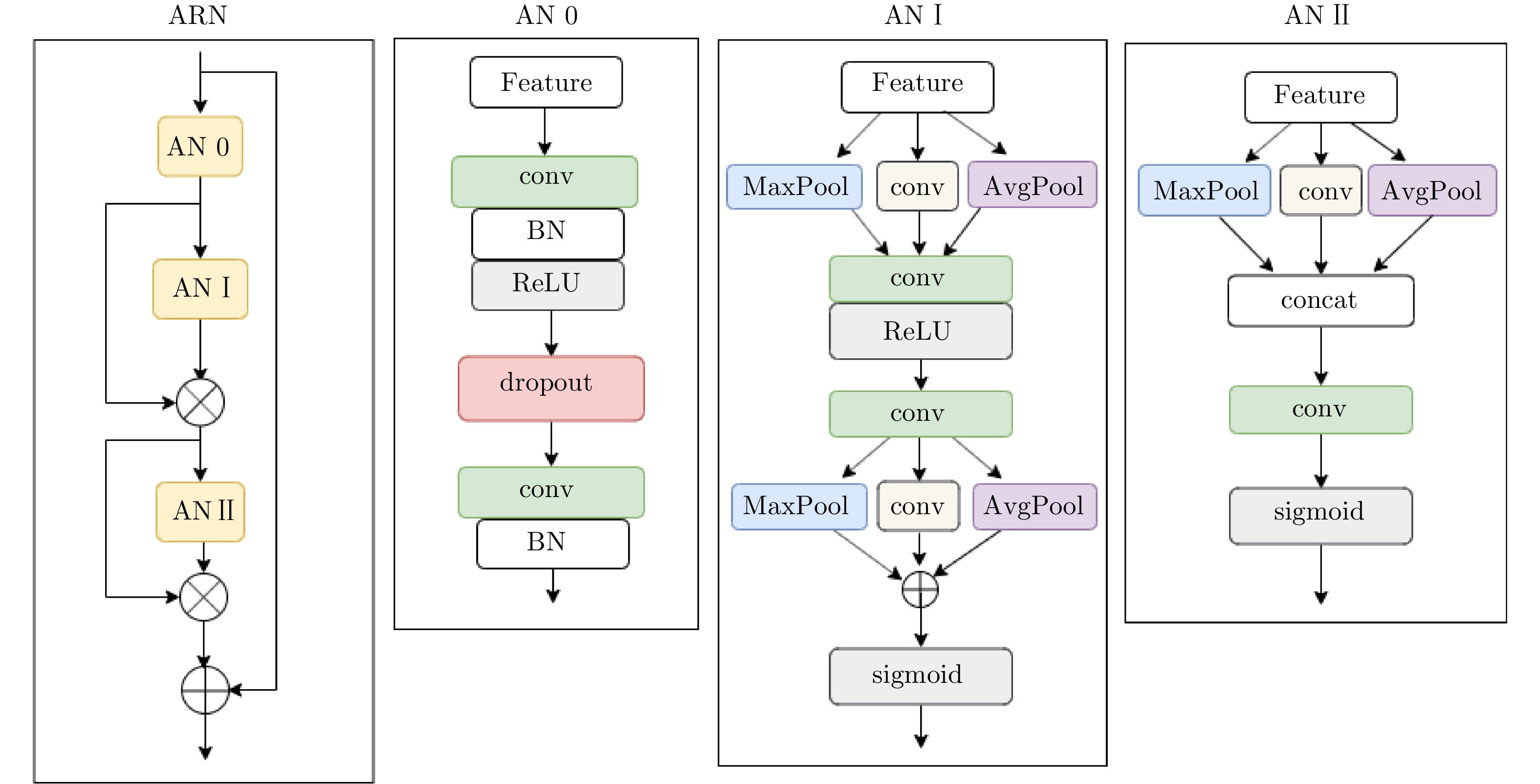
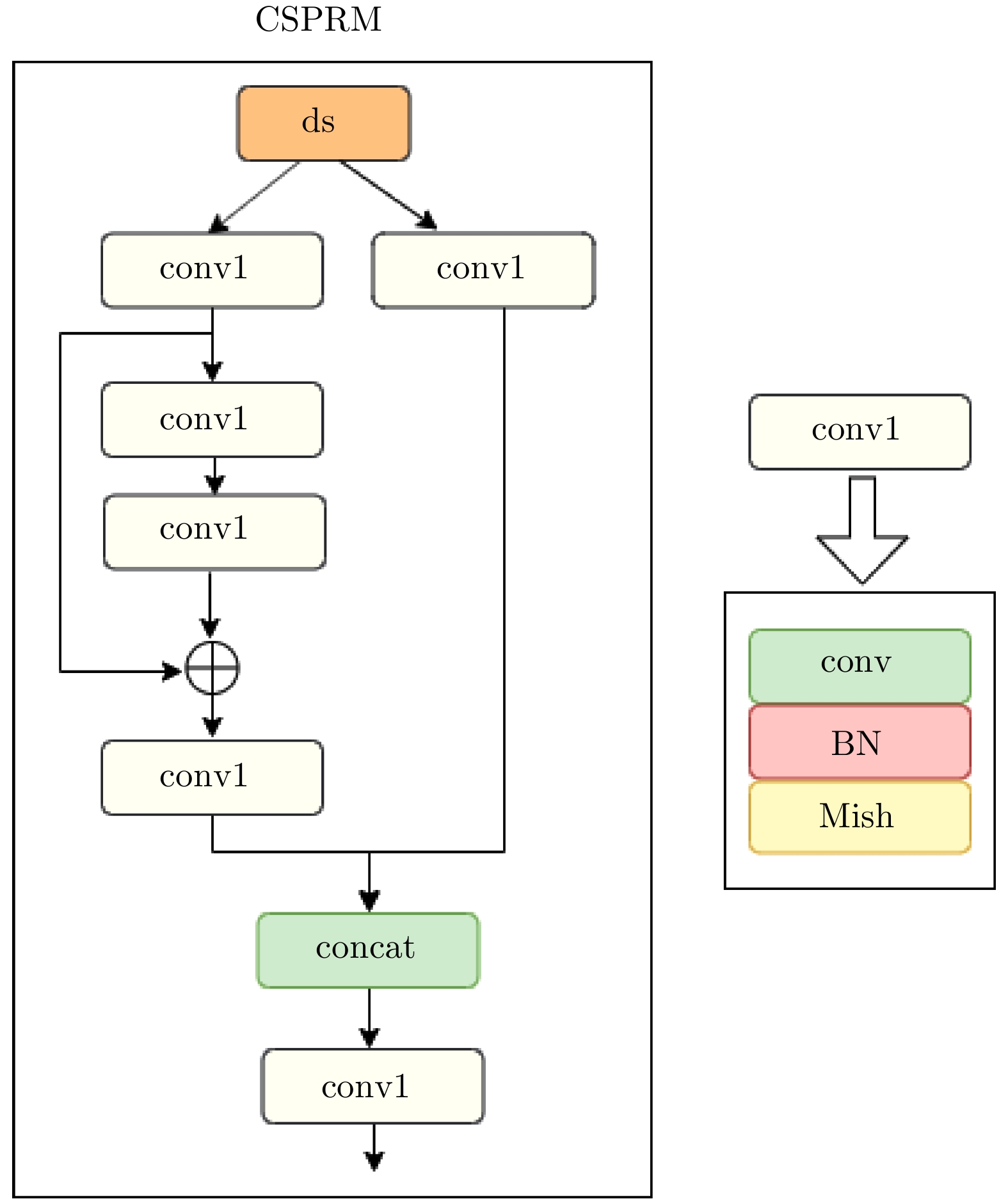
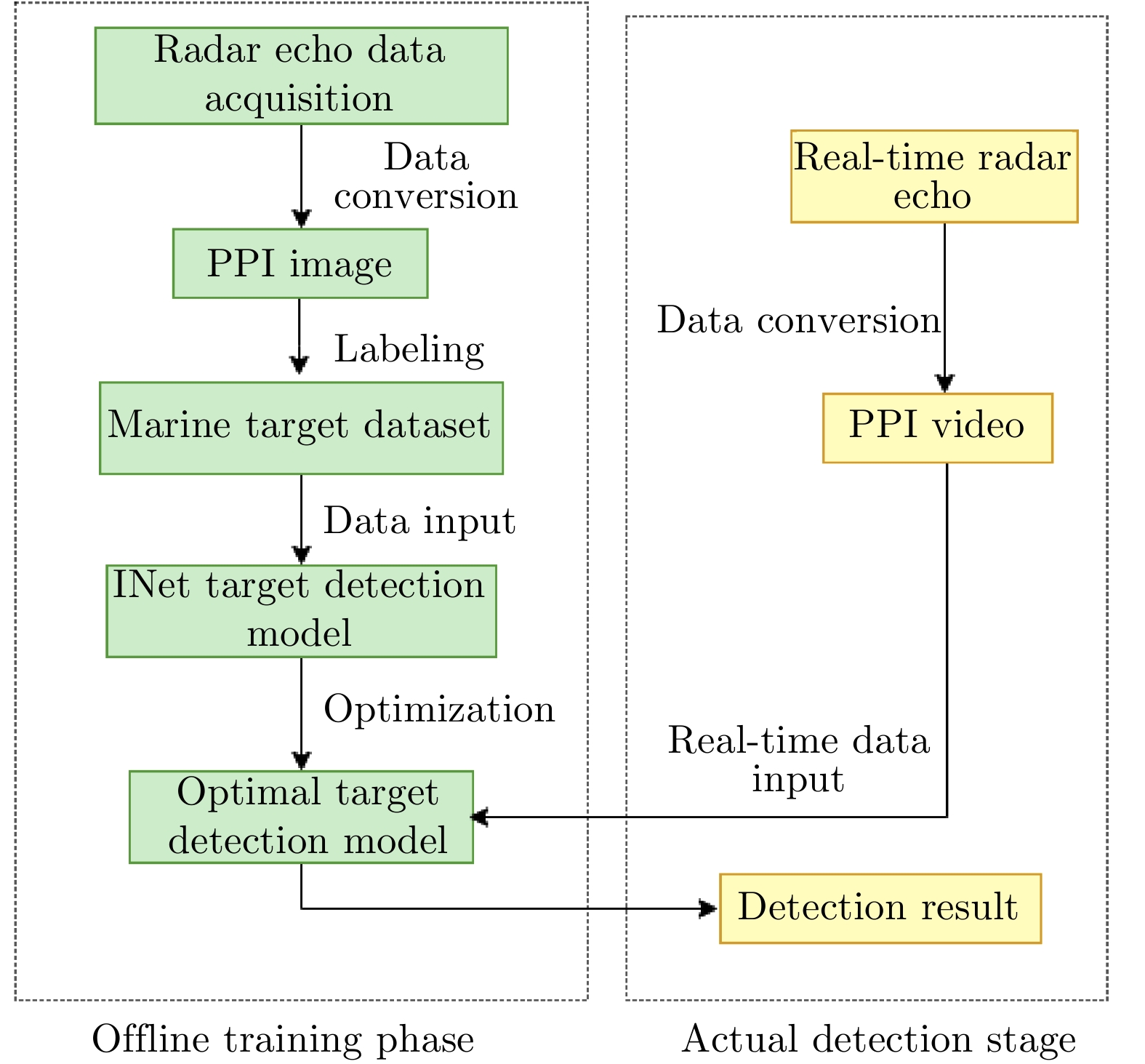
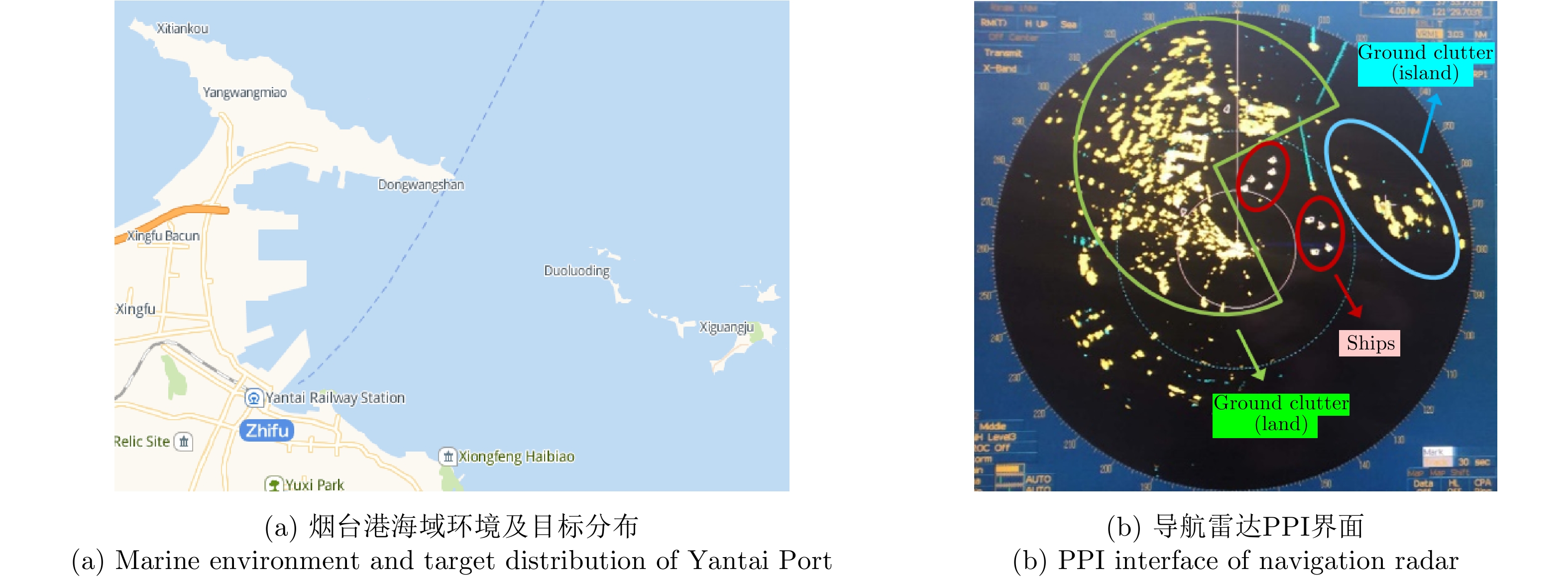
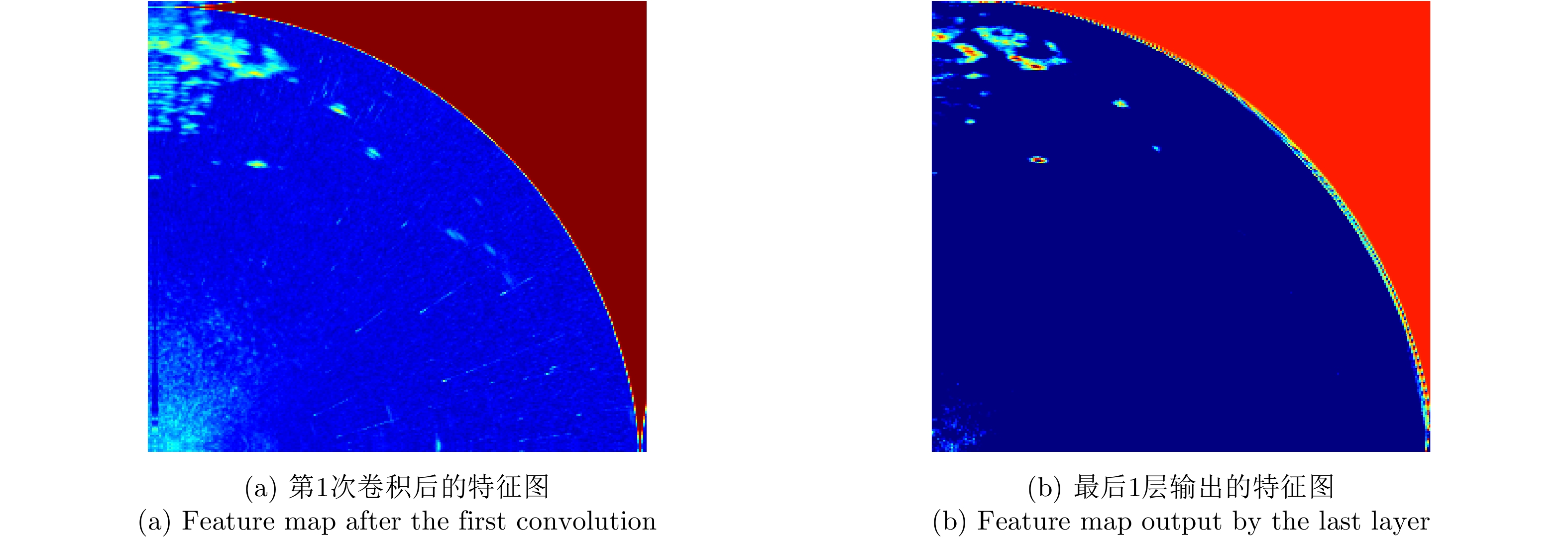
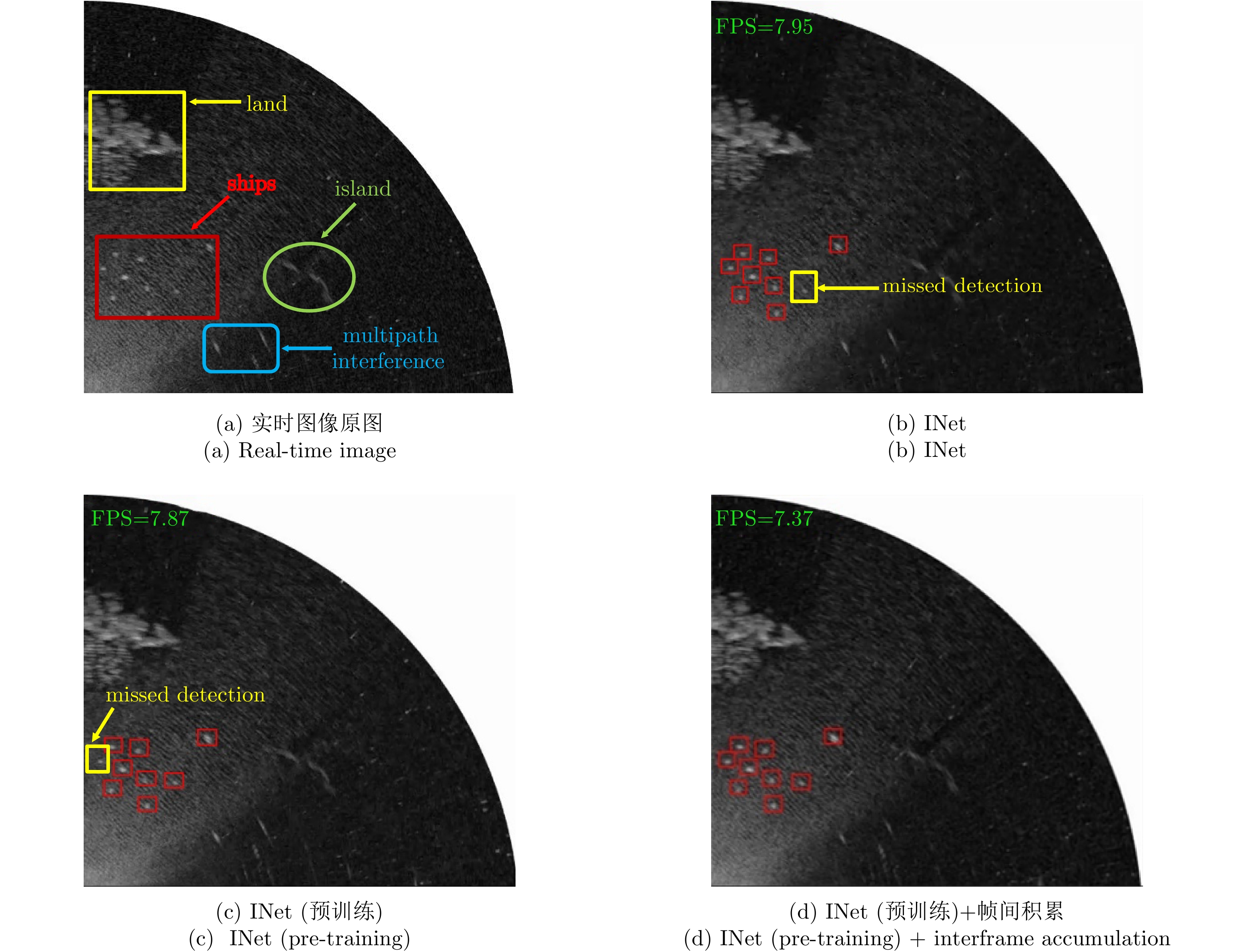
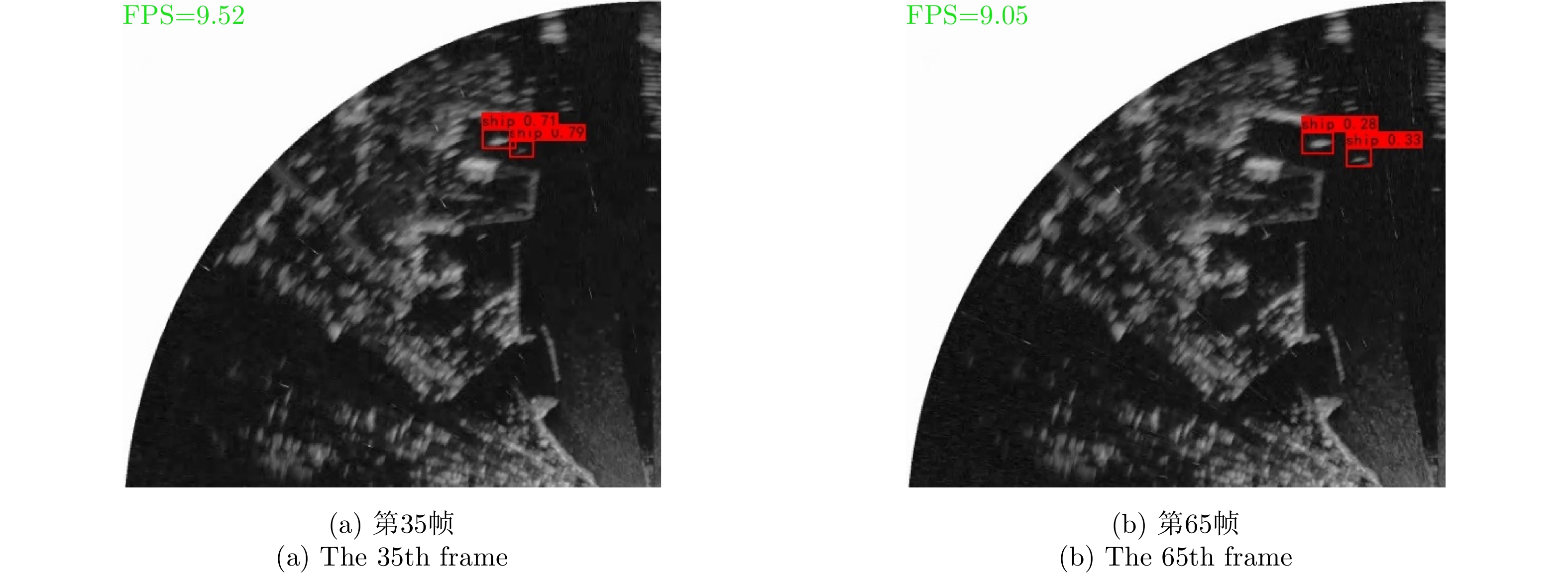
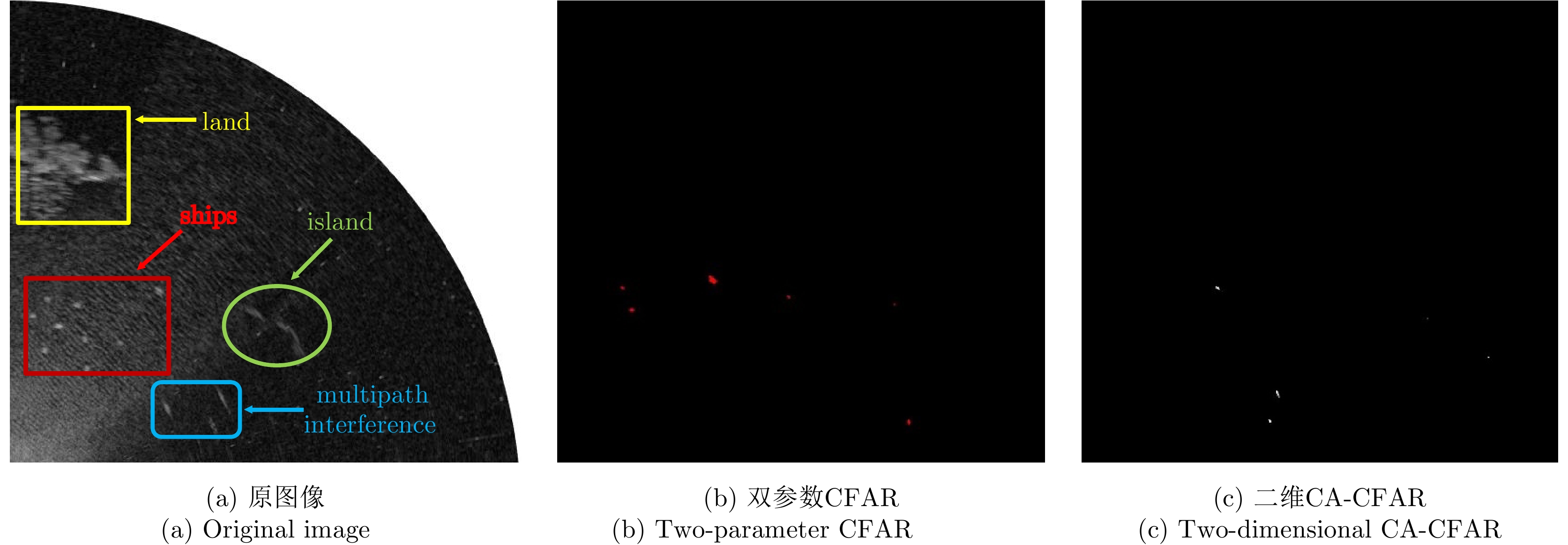
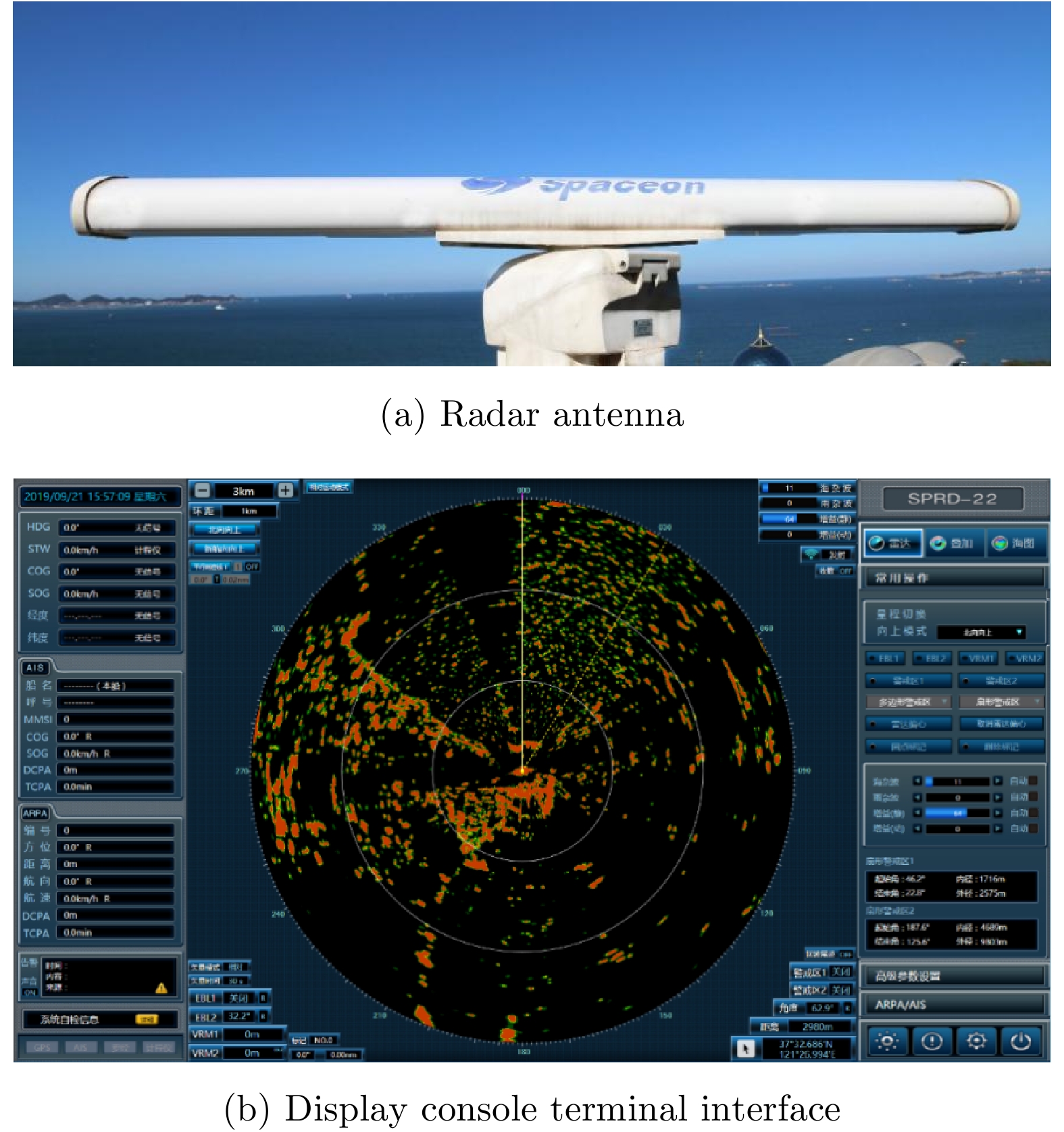
A marine radar device is a major navigation tool for boaters and ships. The images produced by marine radars detect not only hard targets such as ships and coastlines, but also reflections from the sea surface, known as sea clutter. The strong sea clutter and the complex characteristics of marine targets result in transmission of weak echo signals of the images to the radar, which makes difficult for radars to distinguish and analyze. So, effective sea clutter suppression and robust, fast target detection mechanisms are needed for radar to detect marine targets efficiently. However, the existing marine target detection algorithms have limited performance for target detection under complex environments, and have poor adaptability to environment and target characteristics. In this paper, an Integrated Network (INet) for clutter suppression and target detection algorithm is proposed and designed to optimize the signals received from the targets. The layer normalization algorithm integrated with transfer function is used to extract key target features, and the spatial attention network is used to suppress the clutter and to enhance the target signals, and a local cross-scale residual network is built to ensure the weightlessness of the system and accuracy of the detection network. Based on the echo data collected by the navigation radar under various observation conditions, radar images with marine target dataset were constructed. INet was optimized through pre-training of the model and inter-frame accumulation of Plan Position Indicator (PPI) images to obtain the Optimized INet (O-INet). The measured data were verified, tested, and compared with data obtained through various algorithms such as YOLOv3, YOLOv4, two-parameter CFAR, and two-dimensional CA-CFAR. The results obtained prove that the proposed method has superior advantages over other methods in improving detection probability, reducing false alarm rate, and strong generalization ability under complex conditions.
A marine radar device is a major navigation tool for boaters and ships. The images produced by marine radars detect not only hard targets such as ships and coastlines, but also reflections from the sea surface, known as sea clutter. The strong sea clutter and the complex characteristics of marine targets result in transmission of weak echo signals of the images to the radar, which makes difficult for radars to distinguish and analyze. So, effective sea clutter suppression and robust, fast target detection mechanisms are needed for radar to detect marine targets efficiently. However, the existing marine target detection algorithms have limited performance for target detection under complex environments, and have poor adaptability to environment and target characteristics. In this paper, an Integrated Network (INet) for clutter suppression and target detection algorithm is proposed and designed to optimize the signals received from the targets. The layer normalization algorithm integrated with transfer function is used to extract key target features, and the spatial attention network is used to suppress the clutter and to enhance the target signals, and a local cross-scale residual network is built to ensure the weightlessness of the system and accuracy of the detection network. Based on the echo data collected by the navigation radar under various observation conditions, radar images with marine target dataset were constructed. INet was optimized through pre-training of the model and inter-frame accumulation of Plan Position Indicator (PPI) images to obtain the Optimized INet (O-INet). The measured data were verified, tested, and compared with data obtained through various algorithms such as YOLOv3, YOLOv4, two-parameter CFAR, and two-dimensional CA-CFAR. The results obtained prove that the proposed method has superior advantages over other methods in improving detection probability, reducing false alarm rate, and strong generalization ability under complex conditions.
MOU Xiaoqian, CHEN Xiaolong, GUAN Jian, et al. Clutter suppression and marine target detection for radar images based on INet[J]. Journal of Radars, 2020, 9(4): 640–653. doi: 10.12000/JR20090

 Submit Manuscript
Submit Manuscript Peer Review
Peer Review Editor Work
Editor Work Previous Issue
Previous Issue
 Abstract
Abstract 21743KB
21743KB









































































 微信 | 公众平台
微信 | 公众平台 

