
 Submit Manuscript
Submit Manuscript Peer Review
Peer Review Editor Work
Editor Work2021 Vol. 10, No. 1
 Previous Issue
Previous Issue
 Abstract
Abstract 9103KB
9103KB
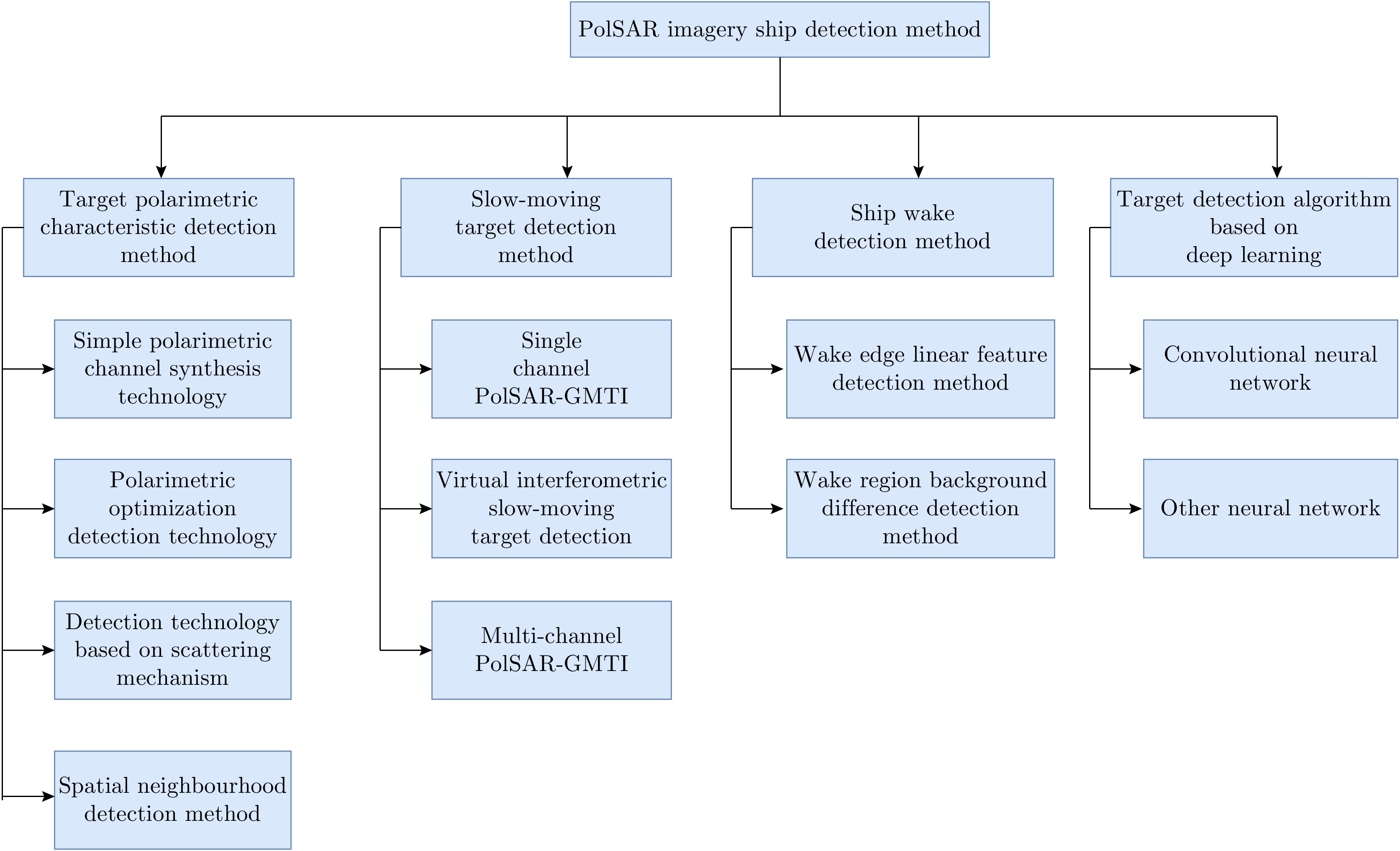
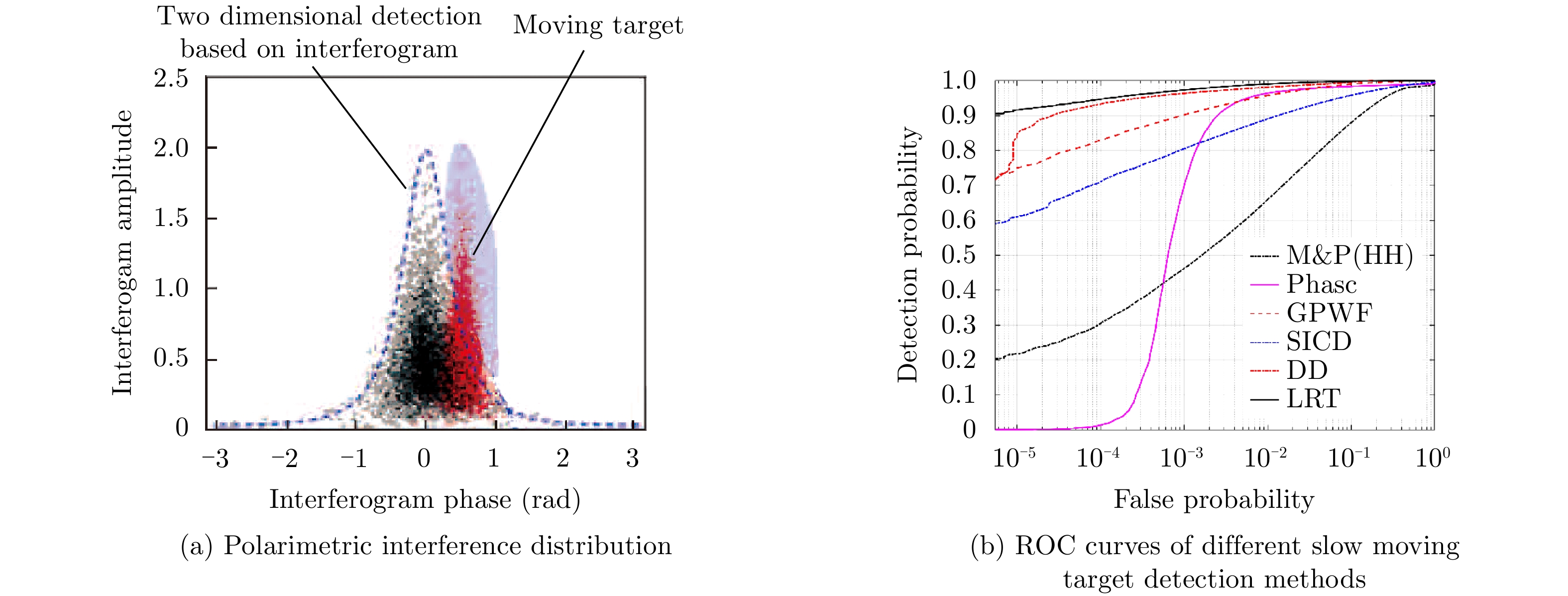
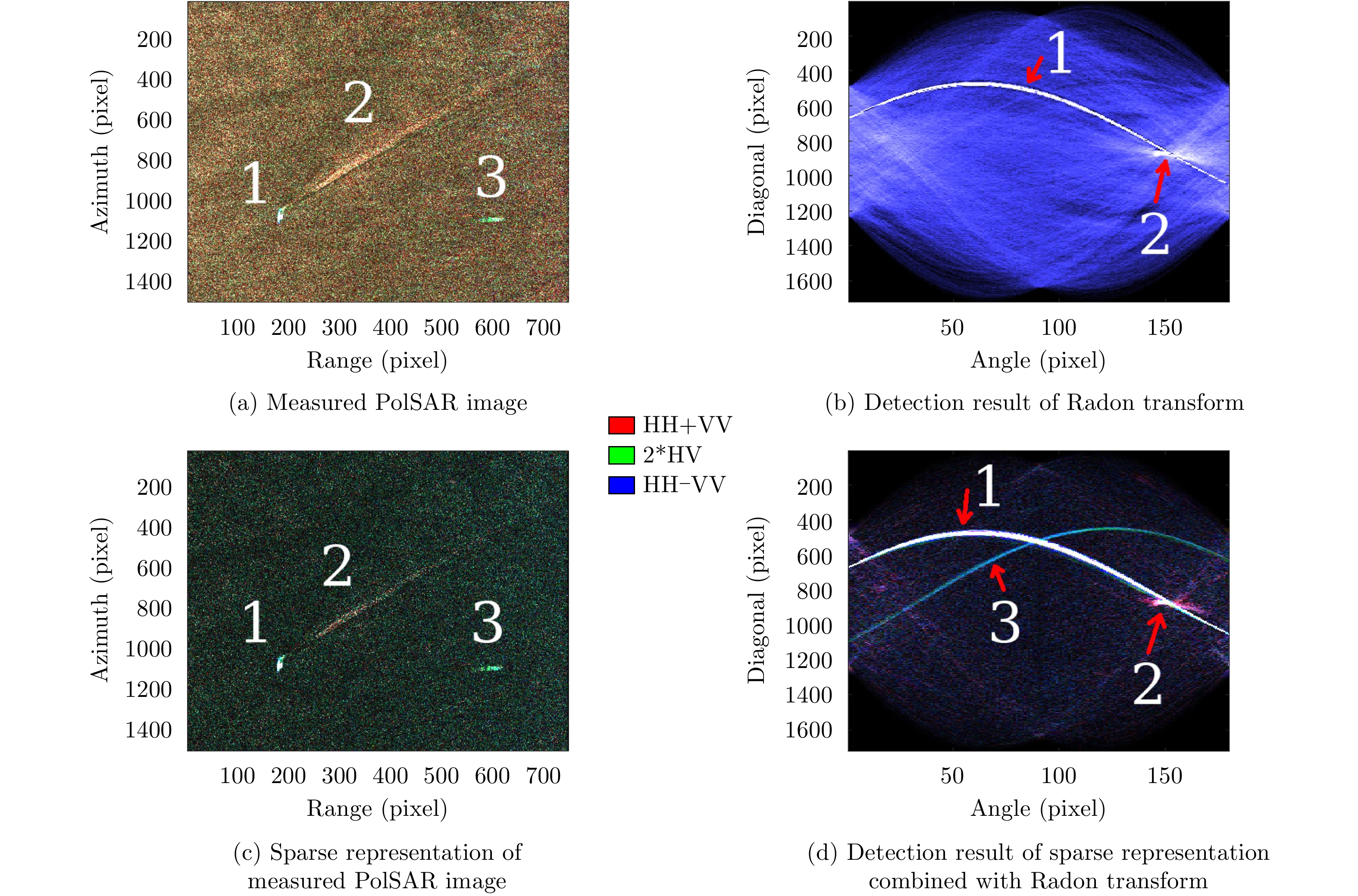
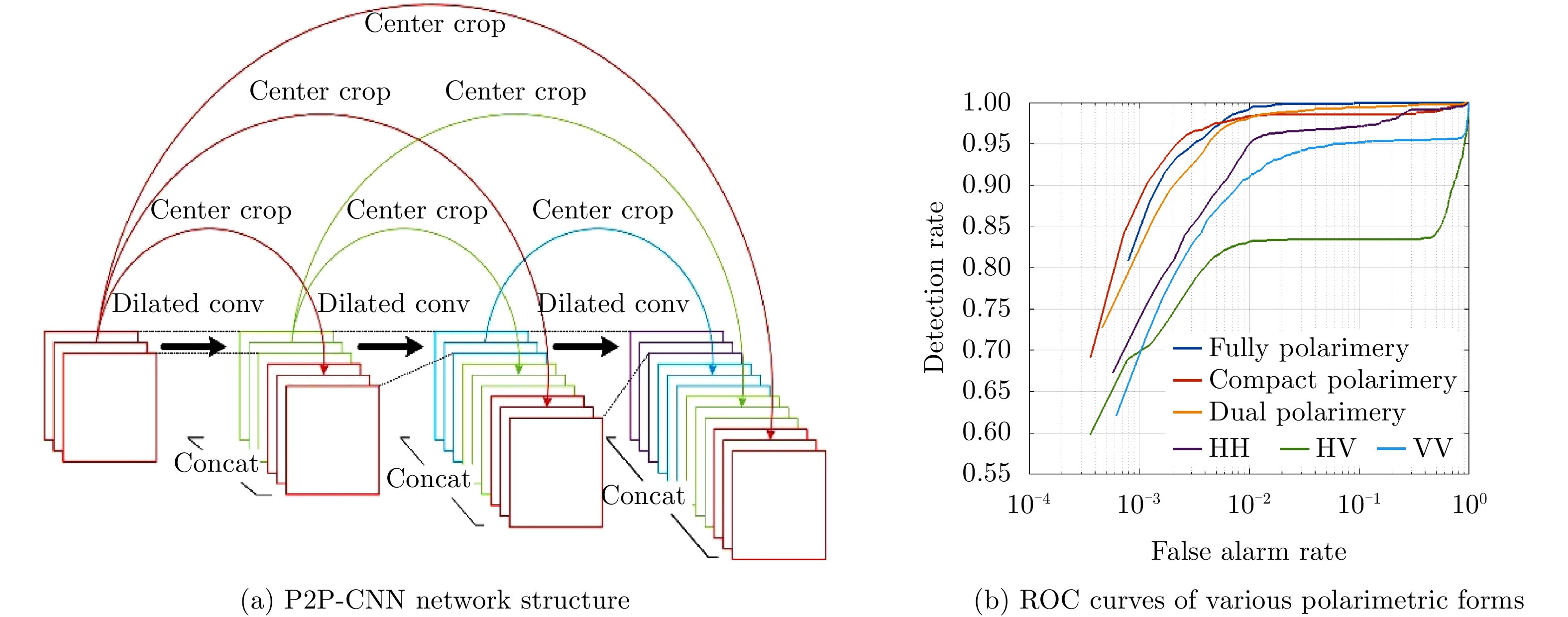
Polarimetric Synthetic Aperture Radar (PolSAR) uses two-dimensional pulse compression to obtain high-resolution images containing polarimetric information. PolSAR has been widely used in military reconnaissance, topographic mapping, environmental and natural disaster monitoring, marine ship detection, and related fields. Addressing the problems associated with sea-clutter modelling and parameter estimation, slow and small target detection, dense target detection, as well as other issues, still remains a challenge in PolSAR ship detection. In this paper, four main classes for PolSAR ship detection are summarized: target polarimetric feature detection, slow and small target detection, ship wake detection, and deep learning detection. In addition, the possible solutions to existing problems in each class are given, and their future development trends are predicted, which can provide some valuable suggestions for interested researchers.
Polarimetric Synthetic Aperture Radar (PolSAR) uses two-dimensional pulse compression to obtain high-resolution images containing polarimetric information. PolSAR has been widely used in military reconnaissance, topographic mapping, environmental and natural disaster monitoring, marine ship detection, and related fields. Addressing the problems associated with sea-clutter modelling and parameter estimation, slow and small target detection, dense target detection, as well as other issues, still remains a challenge in PolSAR ship detection. In this paper, four main classes for PolSAR ship detection are summarized: target polarimetric feature detection, slow and small target detection, ship wake detection, and deep learning detection. In addition, the possible solutions to existing problems in each class are given, and their future development trends are predicted, which can provide some valuable suggestions for interested researchers.







2021, 10(1): 20-34.
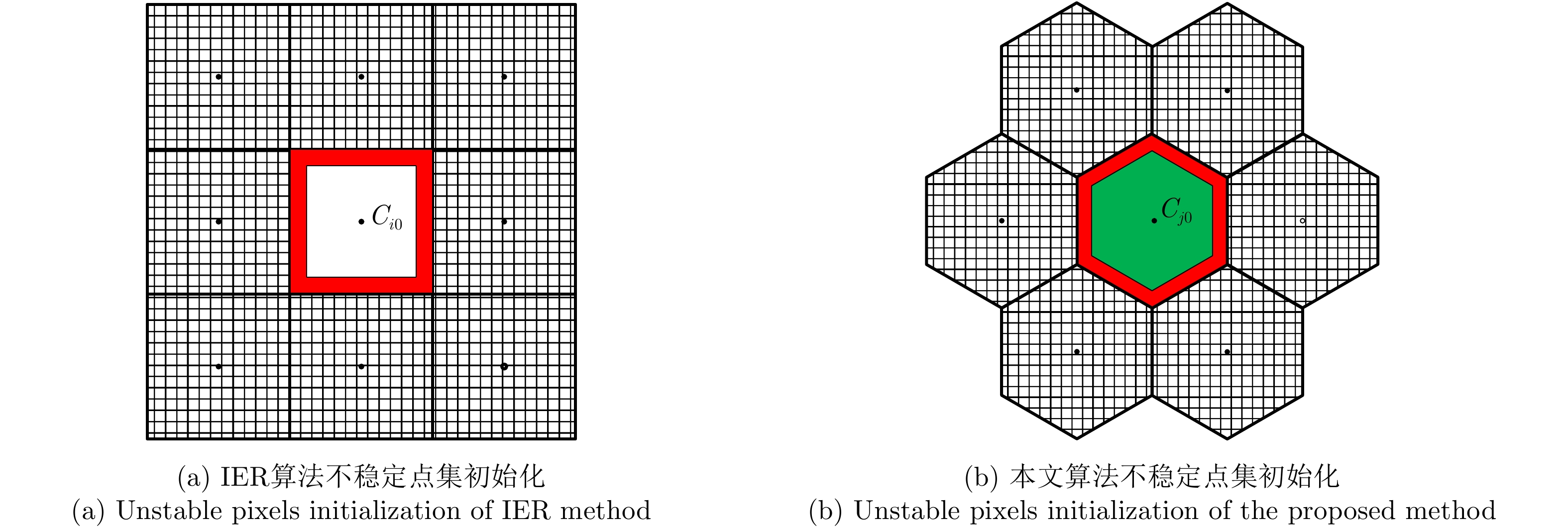
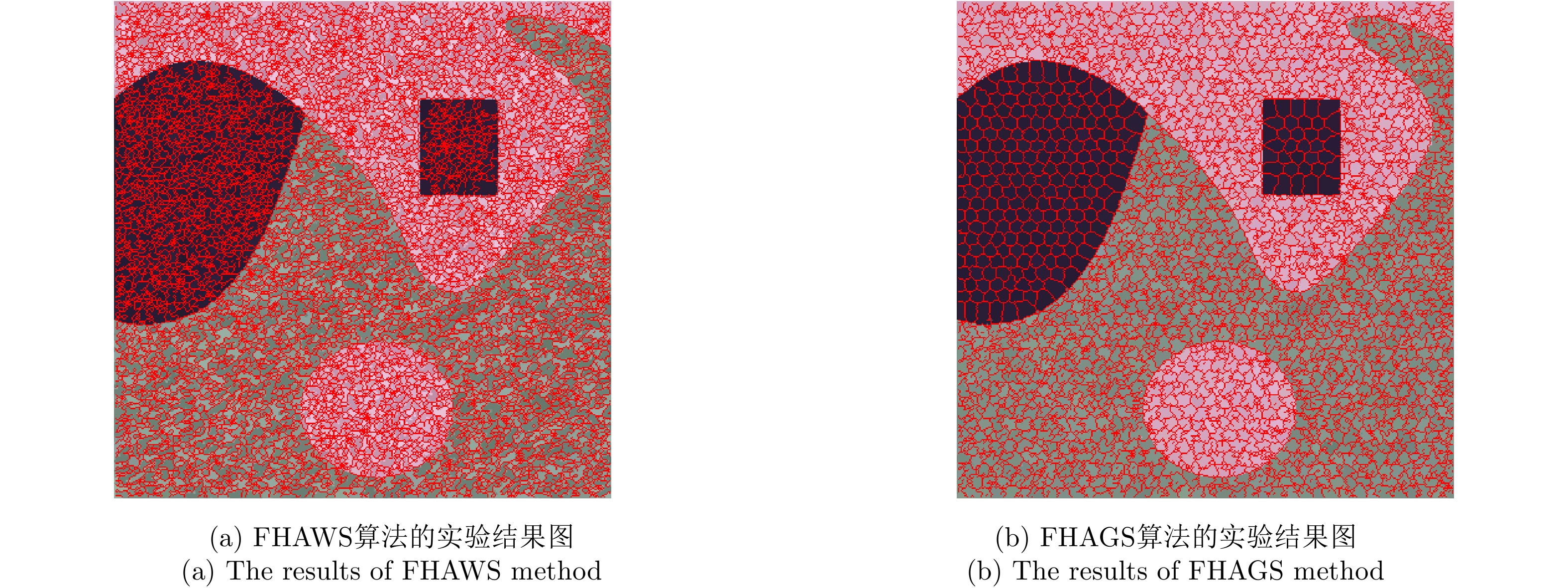
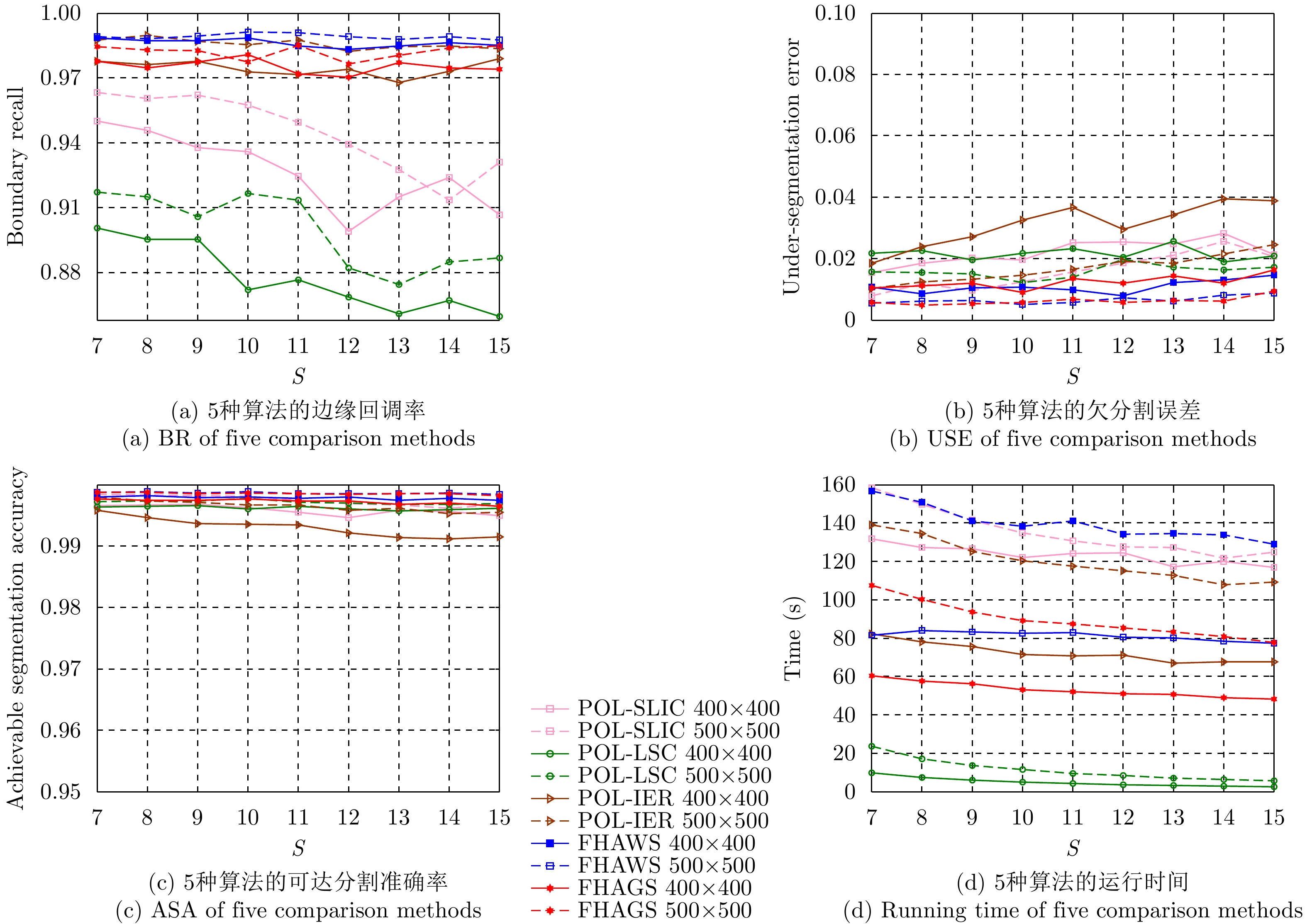
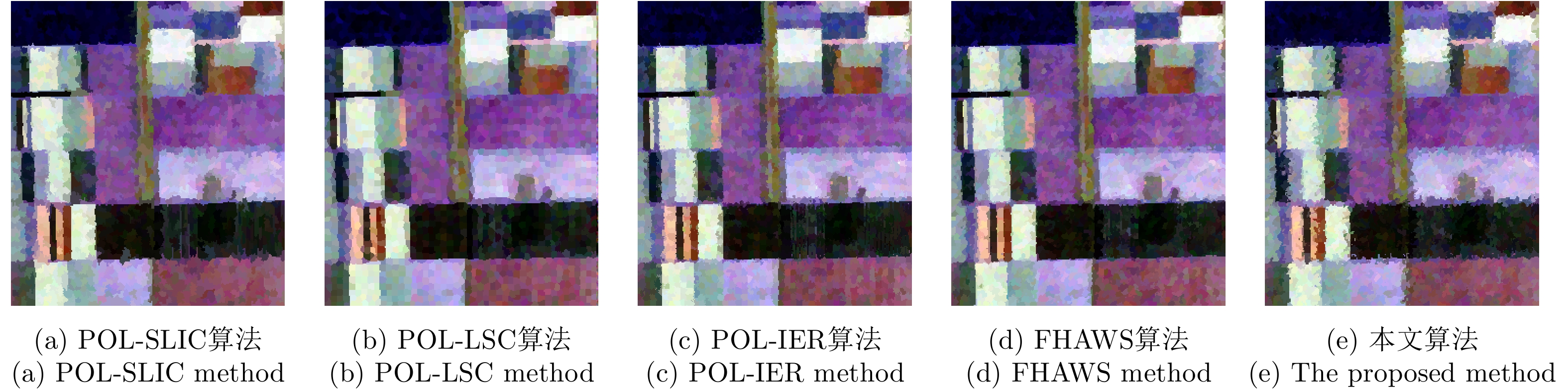
Considering the lack of similarity capabilities of the distance metric used in the traditional Polarimetric Synthetic Aperture Radar (PolSAR) image superpixel segmentation algorithm, a novel PolSAR image superpixel segmentation algorithm based on geodesic distance is proposed in this paper. First, the PolSAR image is initialized as a hexagonal distribution, and all pixels are initialized as unstable pixels. Thereafter, the geodesic distance between two real symmetric Kennaugh matrices is used to measure the similarity between the current unstable point and another cluster point in the search region to more accurately assign labels to unstable points, thereby effectively reducing the number of unstable points. Finally, the postprocessing procedure is used to remove small, isolated regions and generate the final superpixels. To verify the effectiveness of the initialization method and the high efficiency of the geodesic distance, extensive experiments are conducted using simulated PolSAR images. Moreover, the proposed algorithm is analyzed and compared with four other algorithms using simulated and real-world images. Experimental results show that the superpixels generated using the proposed method exhibit higher computational efficiency and a more regular shape that can more accurately fit the edges of real objects compared with those using the four other algorithms.
Considering the lack of similarity capabilities of the distance metric used in the traditional Polarimetric Synthetic Aperture Radar (PolSAR) image superpixel segmentation algorithm, a novel PolSAR image superpixel segmentation algorithm based on geodesic distance is proposed in this paper. First, the PolSAR image is initialized as a hexagonal distribution, and all pixels are initialized as unstable pixels. Thereafter, the geodesic distance between two real symmetric Kennaugh matrices is used to measure the similarity between the current unstable point and another cluster point in the search region to more accurately assign labels to unstable points, thereby effectively reducing the number of unstable points. Finally, the postprocessing procedure is used to remove small, isolated regions and generate the final superpixels. To verify the effectiveness of the initialization method and the high efficiency of the geodesic distance, extensive experiments are conducted using simulated PolSAR images. Moreover, the proposed algorithm is analyzed and compared with four other algorithms using simulated and real-world images. Experimental results show that the superpixels generated using the proposed method exhibit higher computational efficiency and a more regular shape that can more accurately fit the edges of real objects compared with those using the four other algorithms.










2021, 10(1): 35-48.
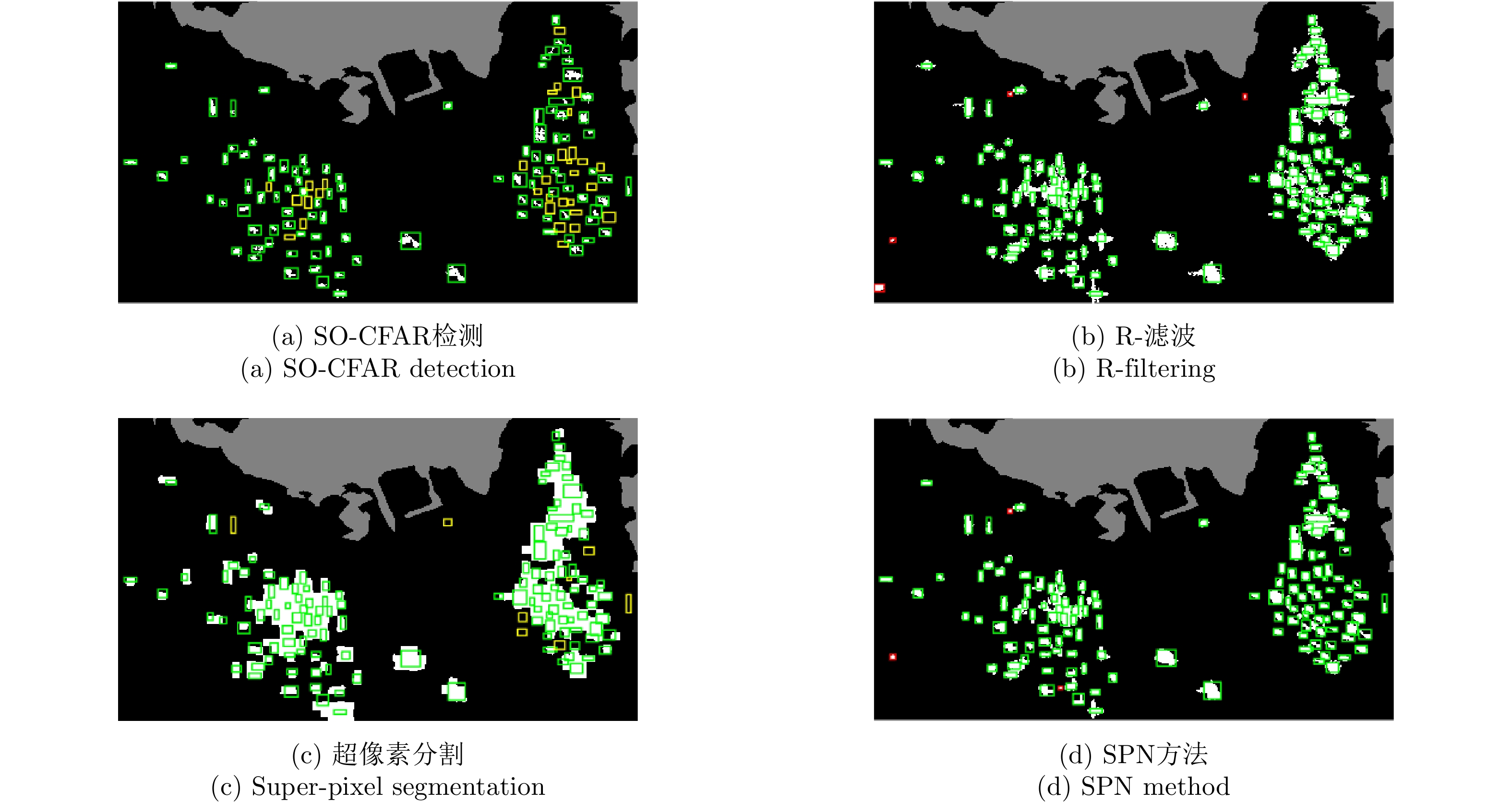
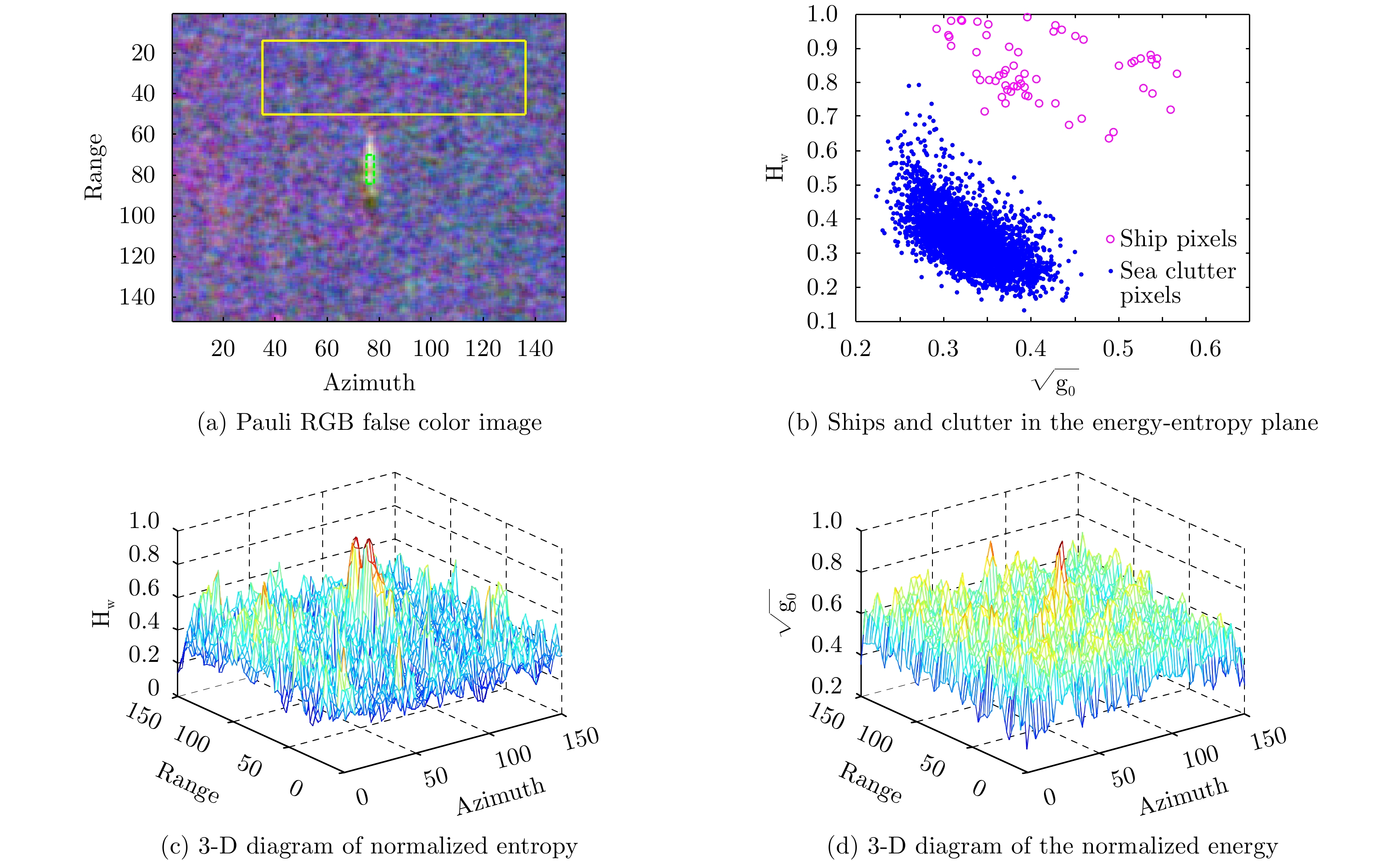
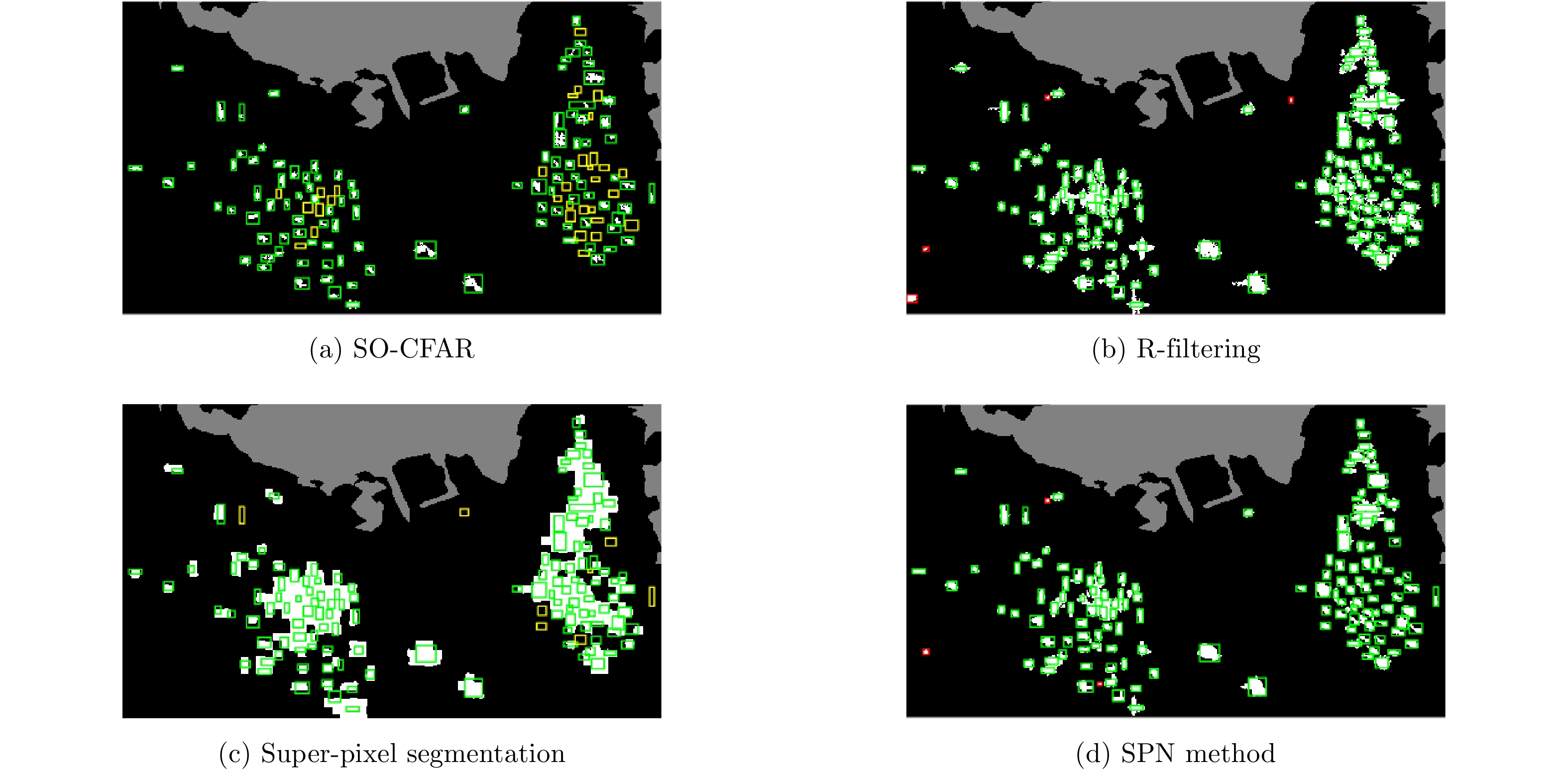
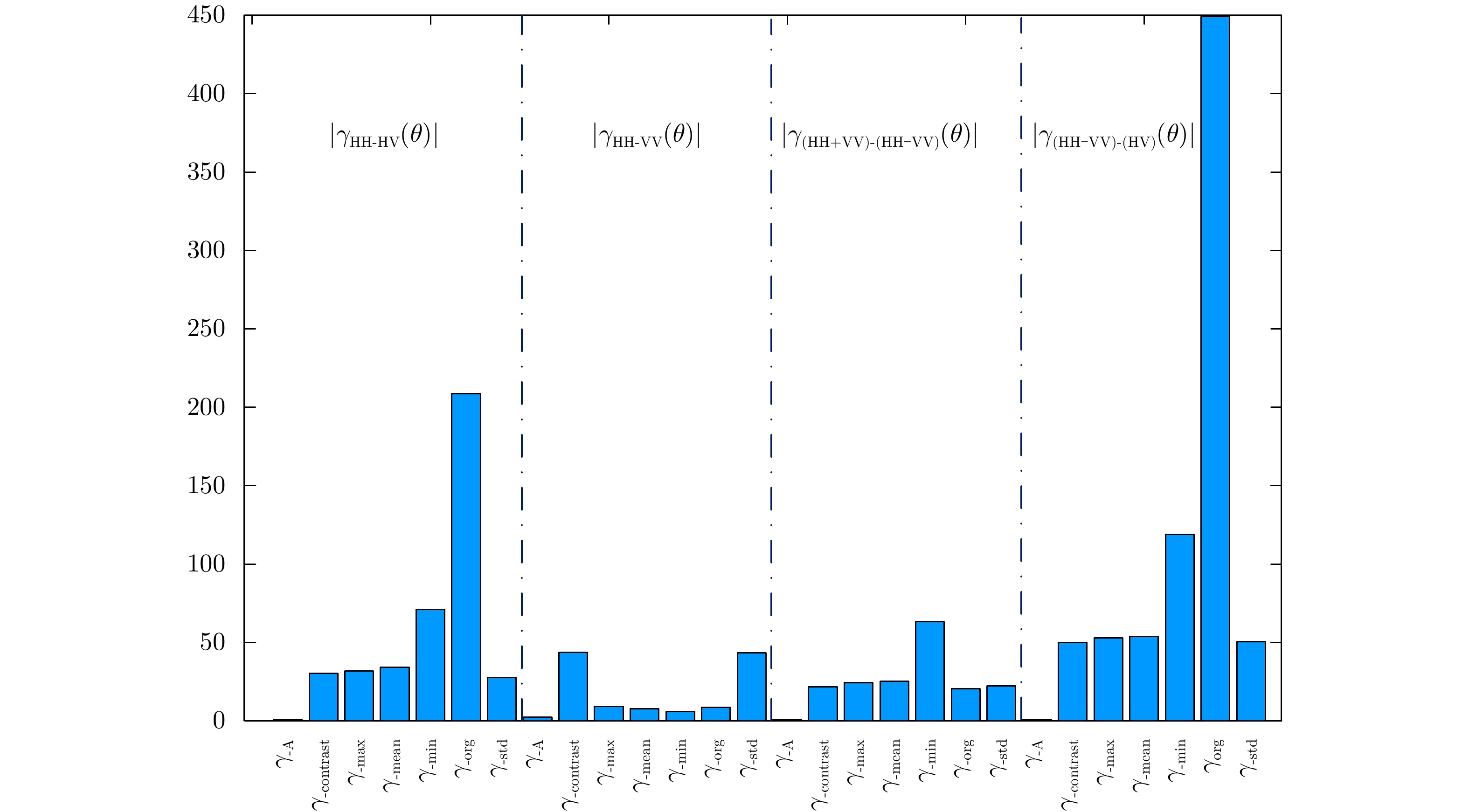
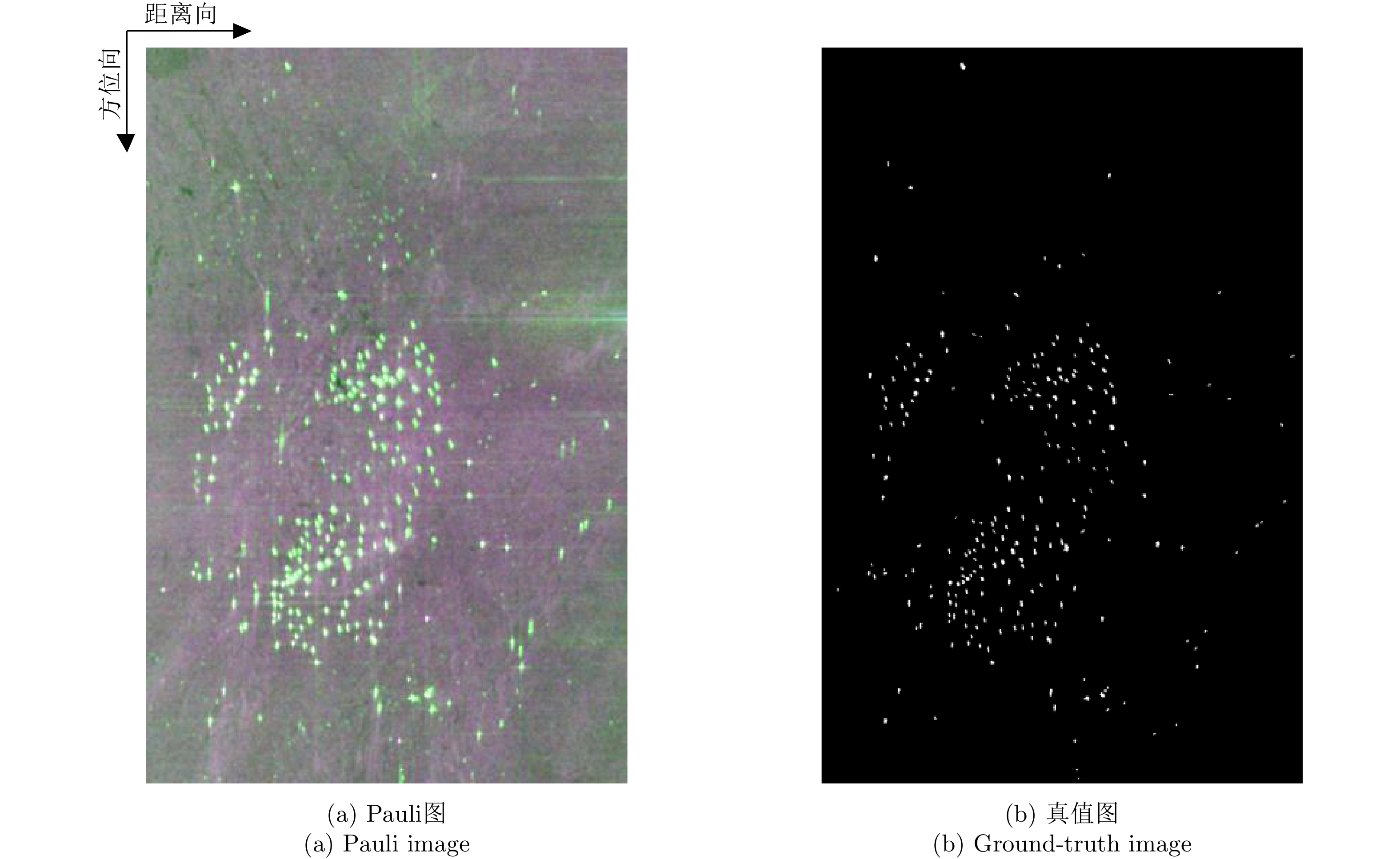
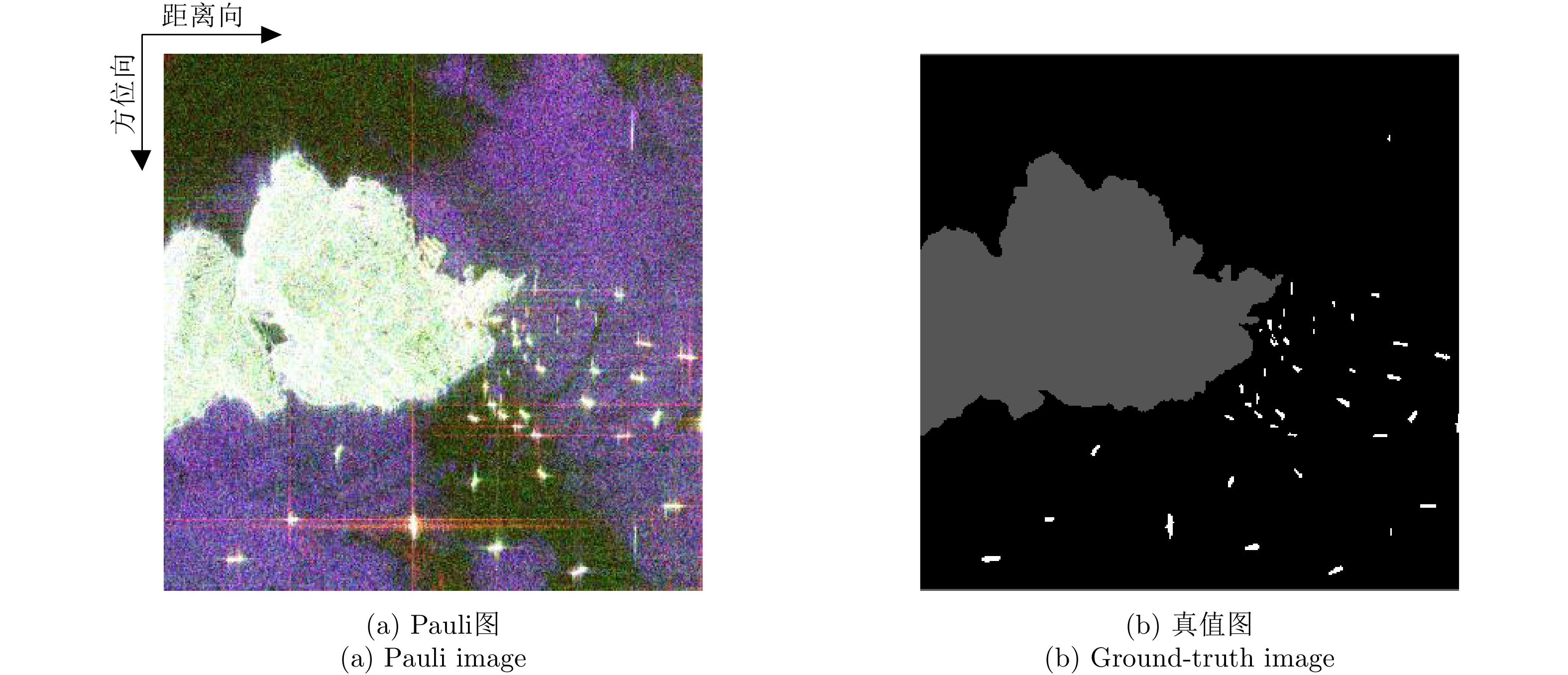
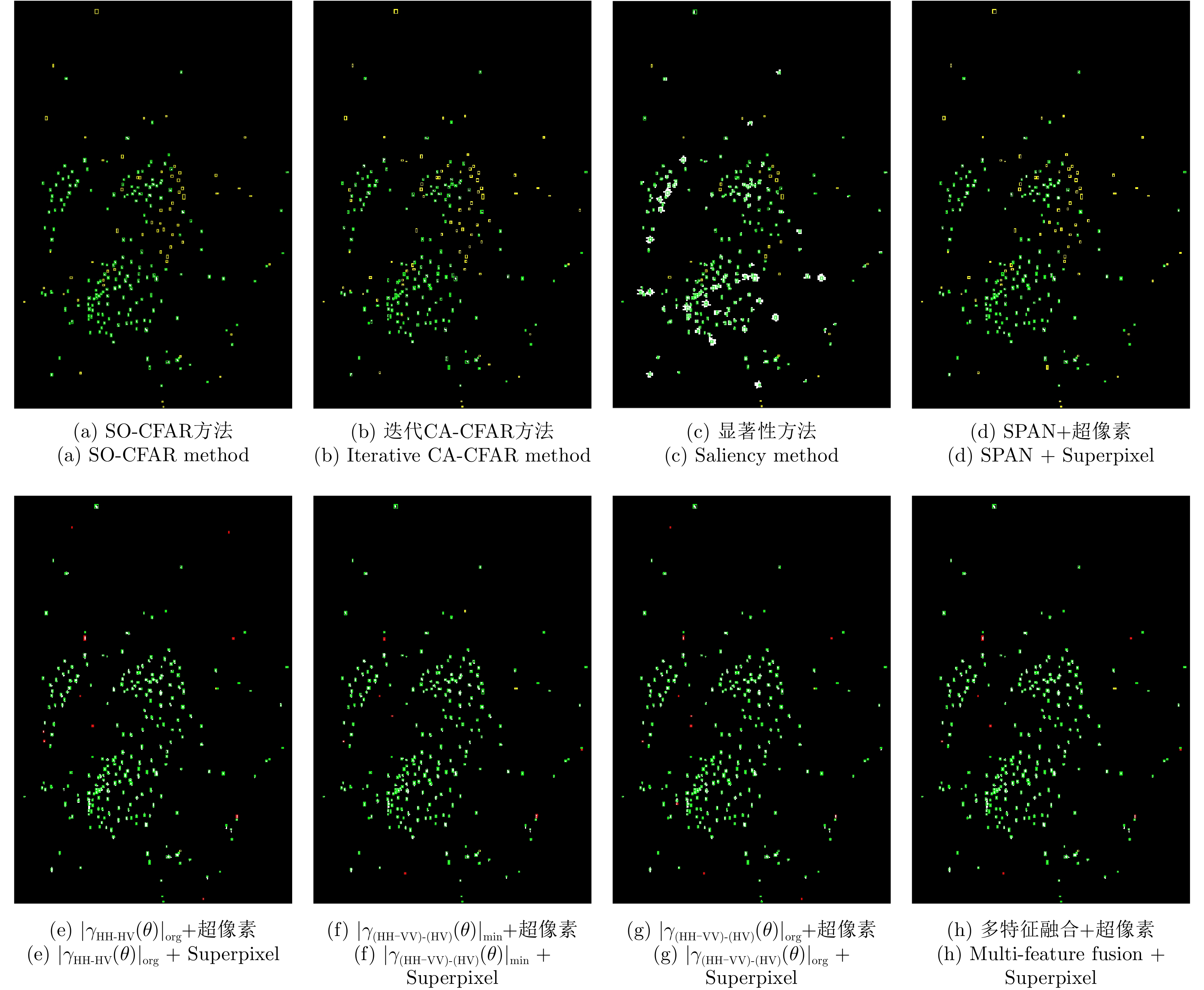
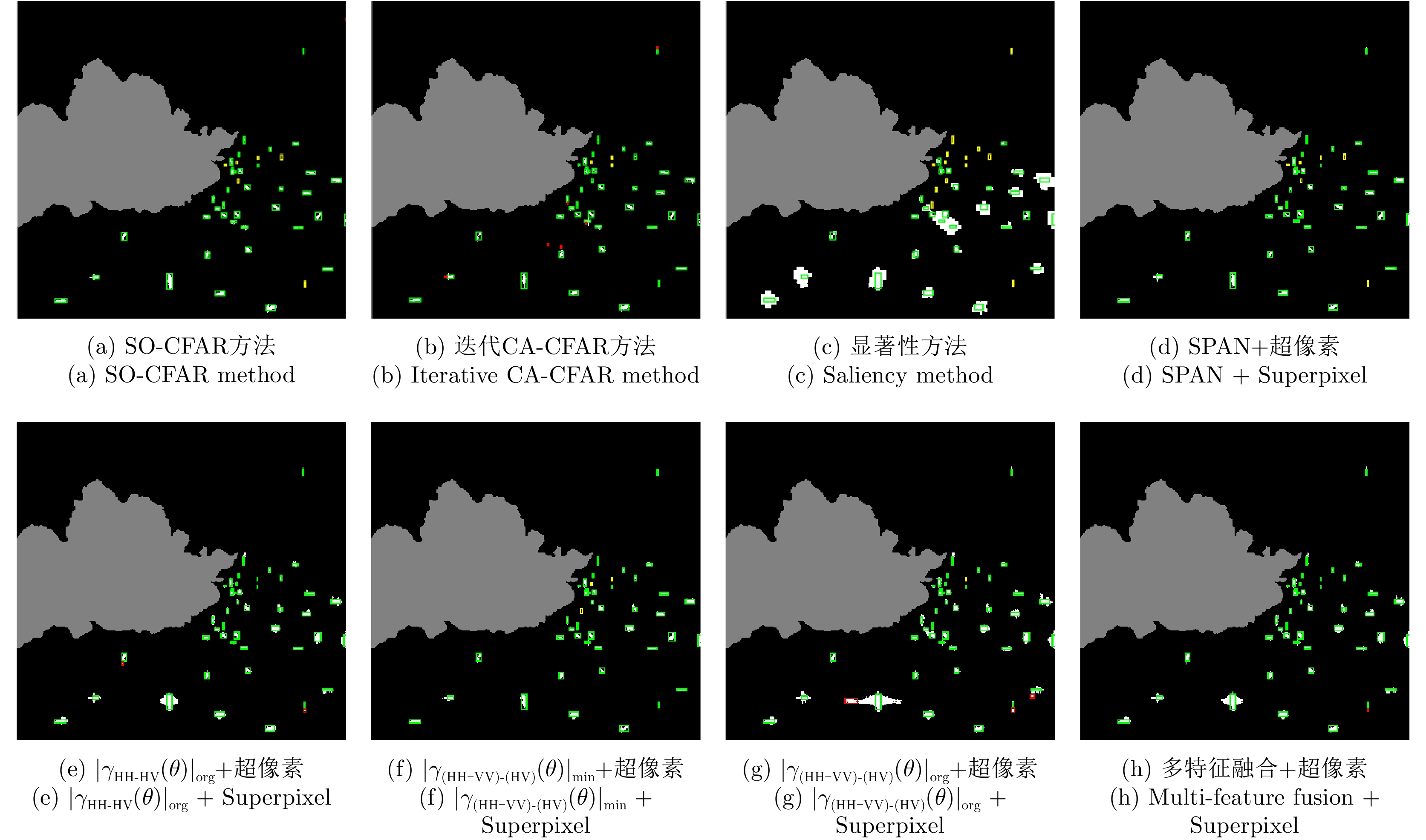
Sea surveillance is an important application of polarimetric Synthetic Aperture Radar (SAR), but ship detection in dense areas remains a major challenge. Due to the crosstalk of multiple targets in dense ship areas, it can be difficult to collect pure sea clutter samples for threshold determination when using the traditional Constant False Alarm Rate (CFAR) moving window, which decreases the detection performance. To address this issue, in this paper, a polarimetric SAR ship detection method is proposed based on polarimetric rotation domain features and superpixel technique, with consideration of both feature selection and detector design. For feature selection, the backscattering of radar targets is sensitive to the relative geometry between the target orientations and the radar line of sight. The information hidden in this scattering diversity can be mined using polarimetric rotation domain analysis, from which the polarimetric correlation pattern and a set of polarimetric rotation domain features are obtained. Target-to-Clutter Ratio (TCR) analysis is conducted, and the three polarimetric features with the highest TCR values are selected for successive target detection. On this basis, a clutter superpixel selection method is developed for detector design based on K-means clustering, which effectively circumvents the influence of dense ship targets on near sea clutter. CFAR ship detection results can be obtained based on the selected clutter samples. Experimental studies on spaceborne Radarsat-2 and GaoFen-3 full polarimetric SAR datasets indicate that, the proposed method can effectively detect dense ship targets with 95% higher figures of merit.
Sea surveillance is an important application of polarimetric Synthetic Aperture Radar (SAR), but ship detection in dense areas remains a major challenge. Due to the crosstalk of multiple targets in dense ship areas, it can be difficult to collect pure sea clutter samples for threshold determination when using the traditional Constant False Alarm Rate (CFAR) moving window, which decreases the detection performance. To address this issue, in this paper, a polarimetric SAR ship detection method is proposed based on polarimetric rotation domain features and superpixel technique, with consideration of both feature selection and detector design. For feature selection, the backscattering of radar targets is sensitive to the relative geometry between the target orientations and the radar line of sight. The information hidden in this scattering diversity can be mined using polarimetric rotation domain analysis, from which the polarimetric correlation pattern and a set of polarimetric rotation domain features are obtained. Target-to-Clutter Ratio (TCR) analysis is conducted, and the three polarimetric features with the highest TCR values are selected for successive target detection. On this basis, a clutter superpixel selection method is developed for detector design based on K-means clustering, which effectively circumvents the influence of dense ship targets on near sea clutter. CFAR ship detection results can be obtained based on the selected clutter samples. Experimental studies on spaceborne Radarsat-2 and GaoFen-3 full polarimetric SAR datasets indicate that, the proposed method can effectively detect dense ship targets with 95% higher figures of merit.





2021, 10(1): 49-60.
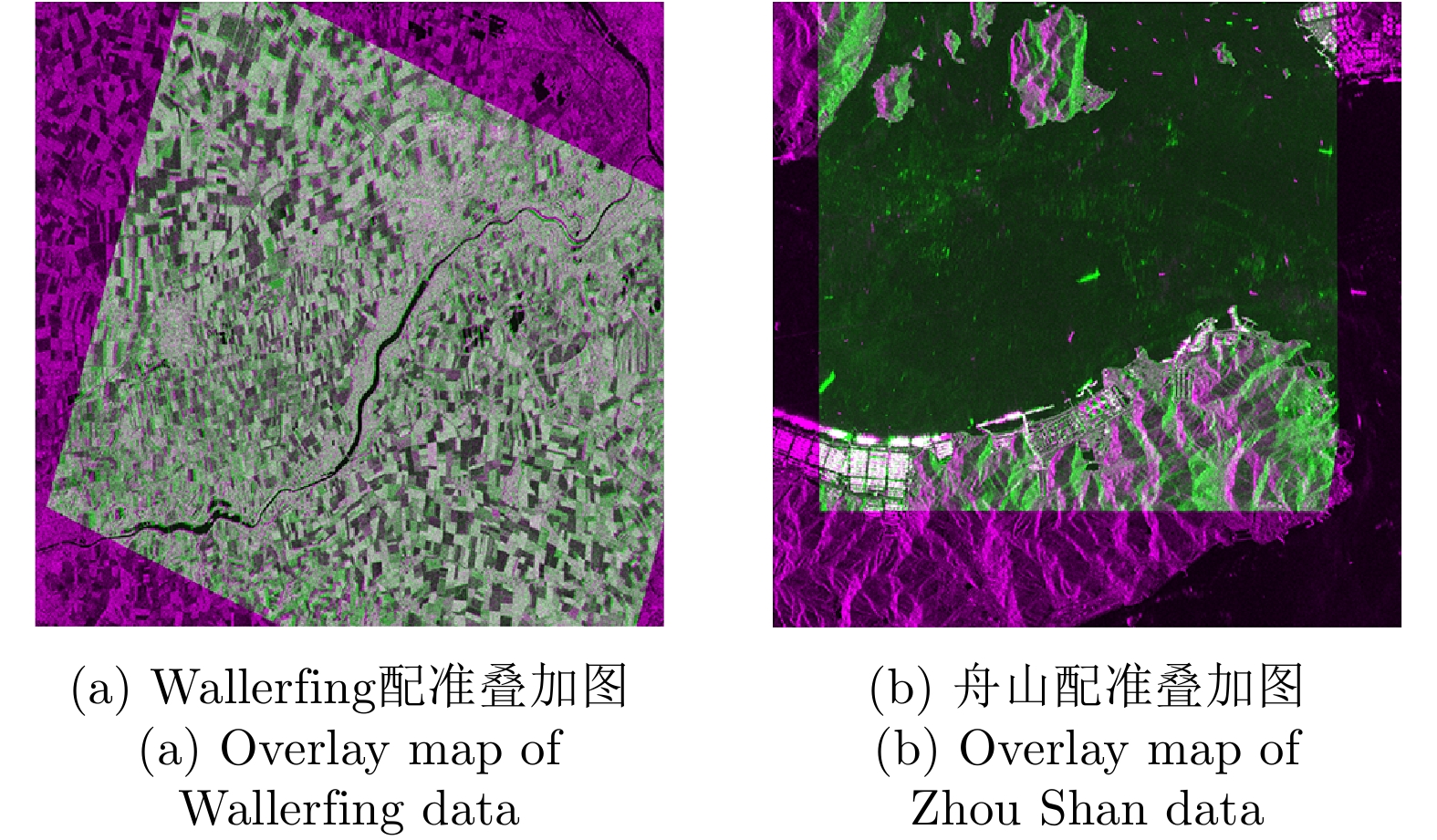
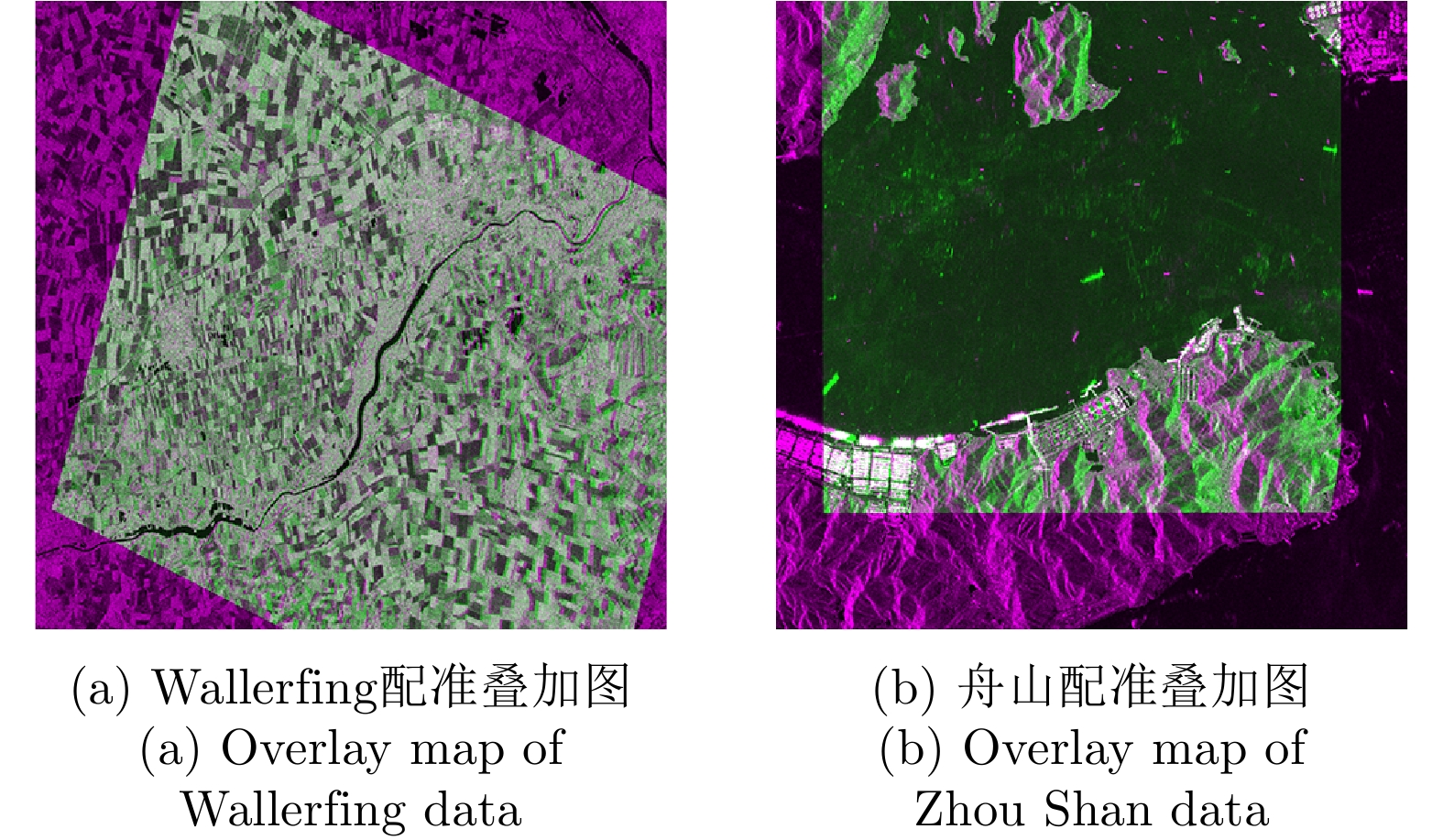
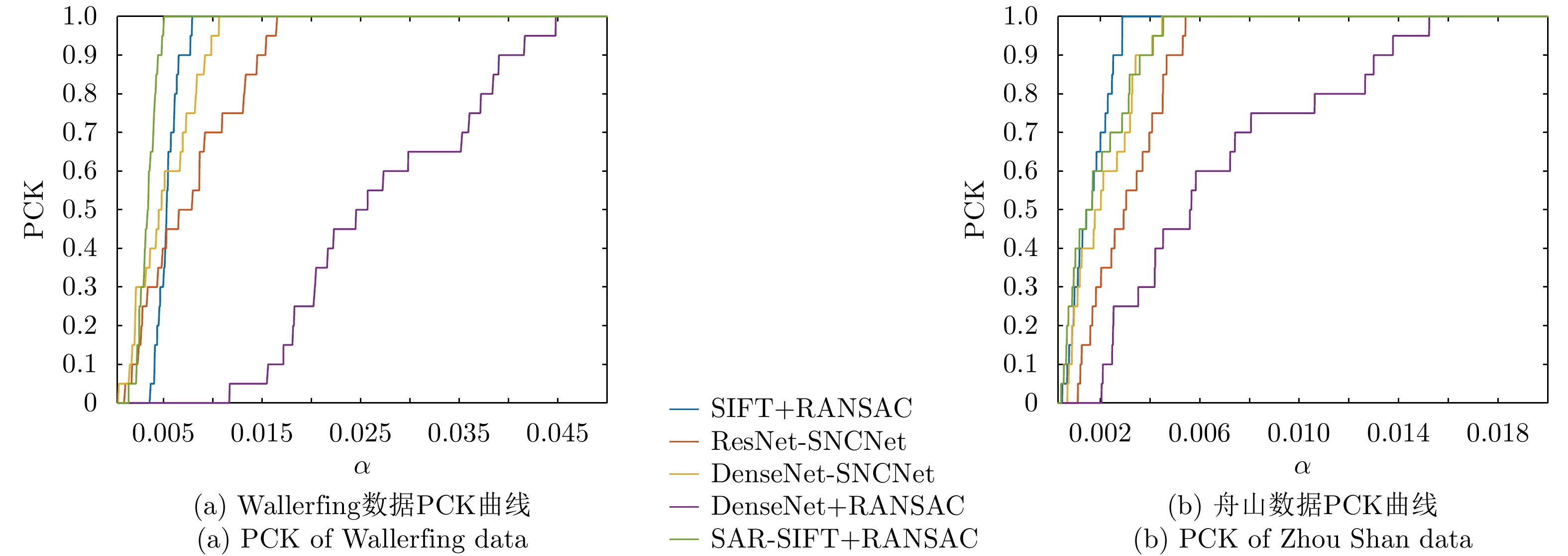
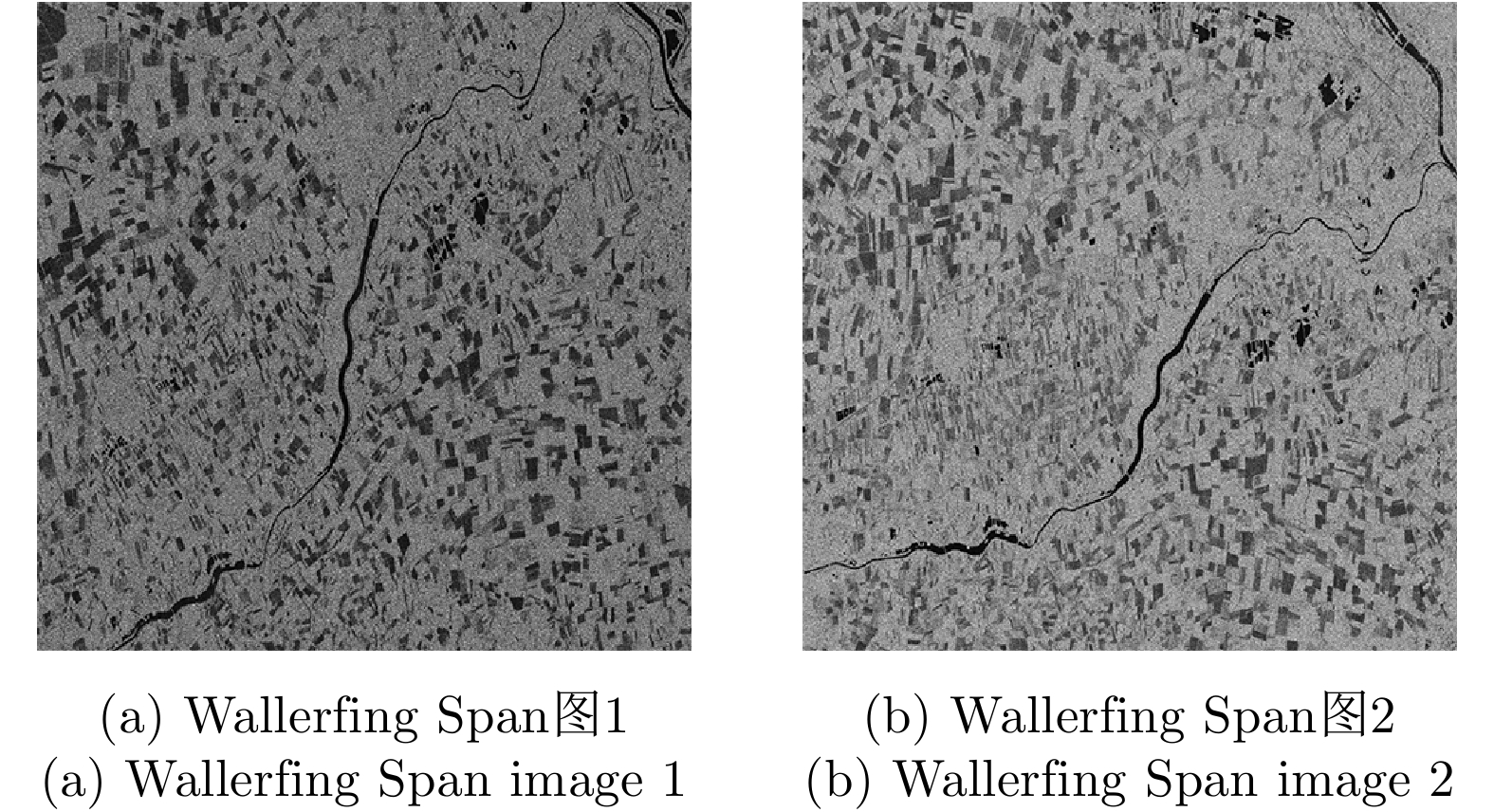
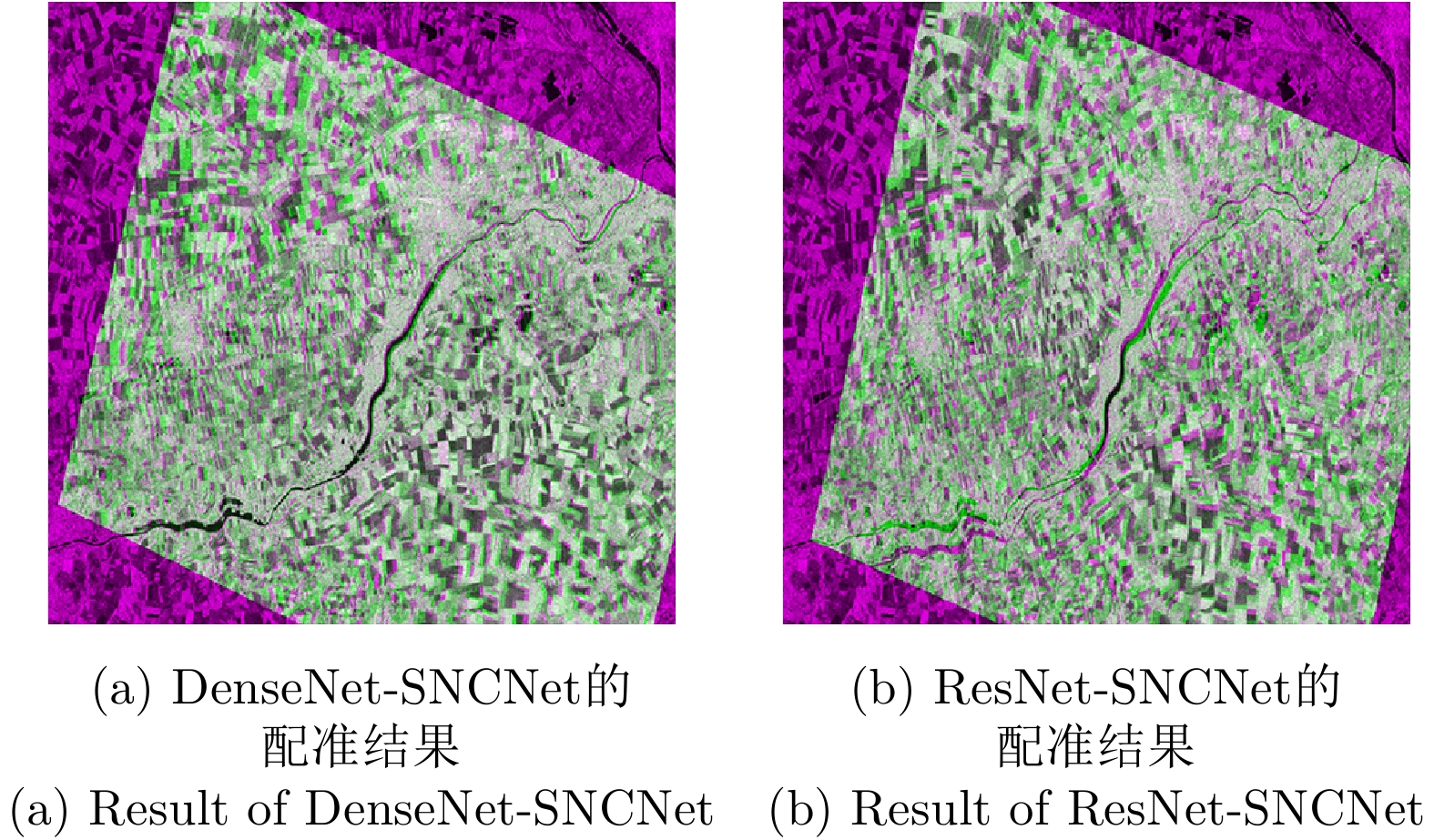
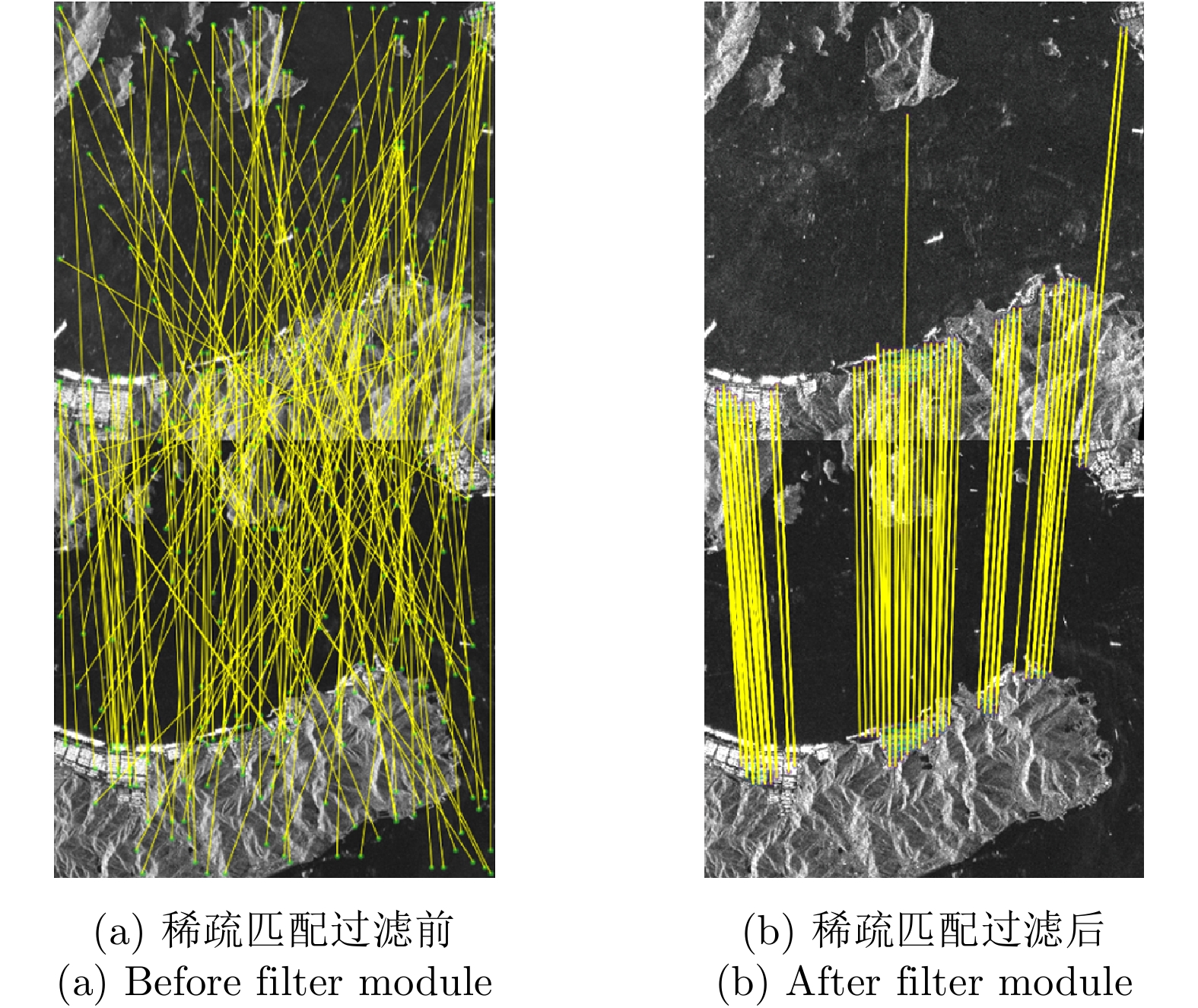
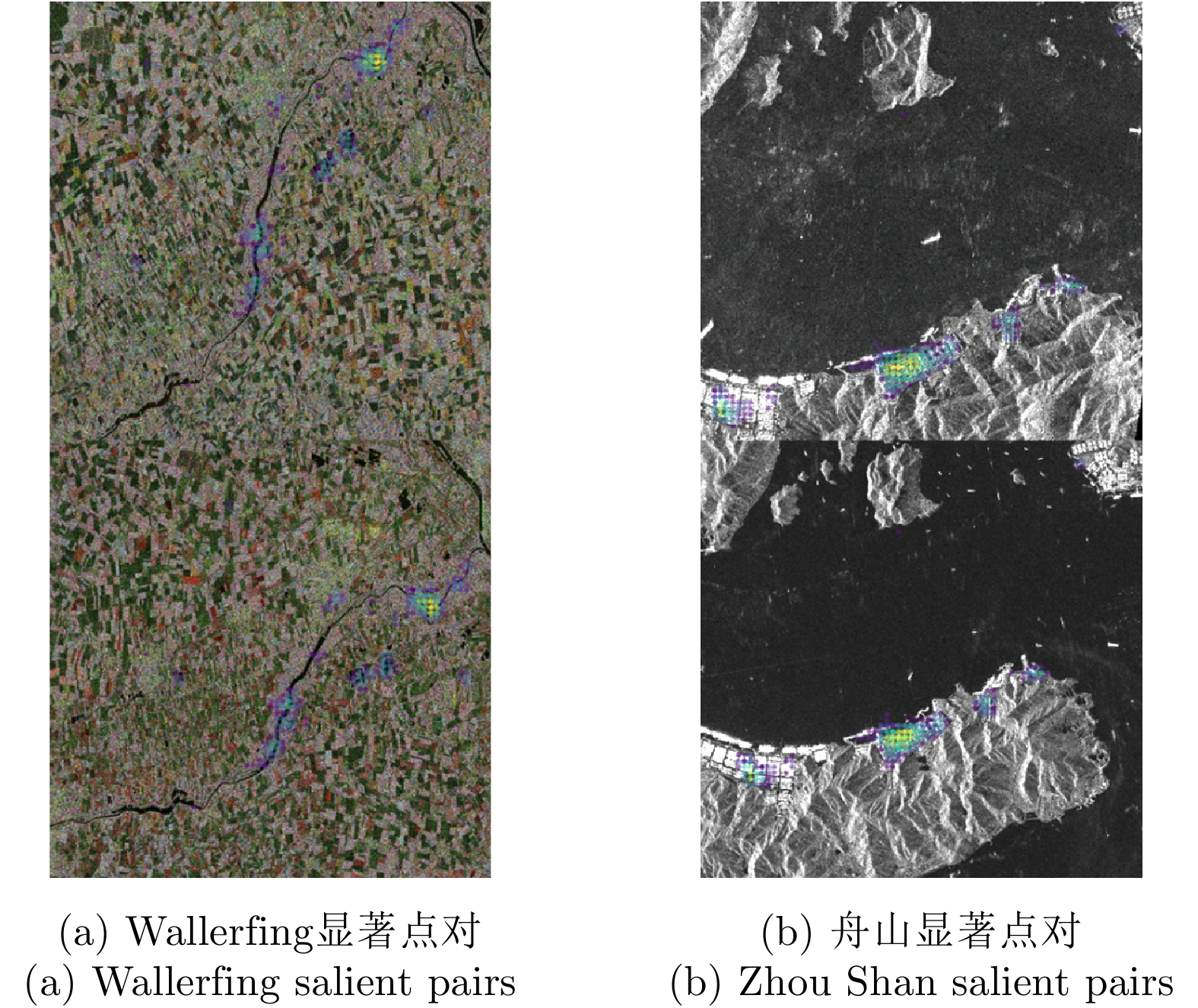
As the base of Synthetic Aperture Radar (SAR) image processing, the registration of polarimetric SAR images requires high accuracy and a fast speed. Most methods used to register polarimetric SAR images based on deep learning are combined with patch matching and iterative estimation, e.g. the random sample consensus algorithm. However, end-to-end deep convolutional neural networks have not been used in the non-iterative affine registration of polarimetric SAR images. This paper proposes a framework for end-to-end polarimetric SAR image registration that is based on weakly-supervised learning and uses no image patch processing or iterative parameter estimation. First, feature extraction is performed on input image pairs to obtain dense feature maps with the most relevant k matches kept for each feature point. To filter the matched feature pairs, the 4D sparse feature matching maps are then fed into a 4D sparse convolutional network based on neighborhood consensus. Lastly, the affine parameters are solved by the weighted least square method according to the degree of confidence of the matches, which enables the affine registration of the input image pair. As test image pairs, we use farmland data from Wallerfing, Germany obtained by the RADARSAT-2 satellite and Zhoushan port data from China obtained by the PAZ satellite. Comprehensive experiments were conducted on polarimetric SAR image pairs using different orbit directions, imaging modes, polarization types and resolutions. Compared with four existing methods, the proposed method was found to have high accuracy and a fast speed.
As the base of Synthetic Aperture Radar (SAR) image processing, the registration of polarimetric SAR images requires high accuracy and a fast speed. Most methods used to register polarimetric SAR images based on deep learning are combined with patch matching and iterative estimation, e.g. the random sample consensus algorithm. However, end-to-end deep convolutional neural networks have not been used in the non-iterative affine registration of polarimetric SAR images. This paper proposes a framework for end-to-end polarimetric SAR image registration that is based on weakly-supervised learning and uses no image patch processing or iterative parameter estimation. First, feature extraction is performed on input image pairs to obtain dense feature maps with the most relevant k matches kept for each feature point. To filter the matched feature pairs, the 4D sparse feature matching maps are then fed into a 4D sparse convolutional network based on neighborhood consensus. Lastly, the affine parameters are solved by the weighted least square method according to the degree of confidence of the matches, which enables the affine registration of the input image pair. As test image pairs, we use farmland data from Wallerfing, Germany obtained by the RADARSAT-2 satellite and Zhoushan port data from China obtained by the PAZ satellite. Comprehensive experiments were conducted on polarimetric SAR image pairs using different orbit directions, imaging modes, polarization types and resolutions. Compared with four existing methods, the proposed method was found to have high accuracy and a fast speed.




2021, 10(1): 61-73.
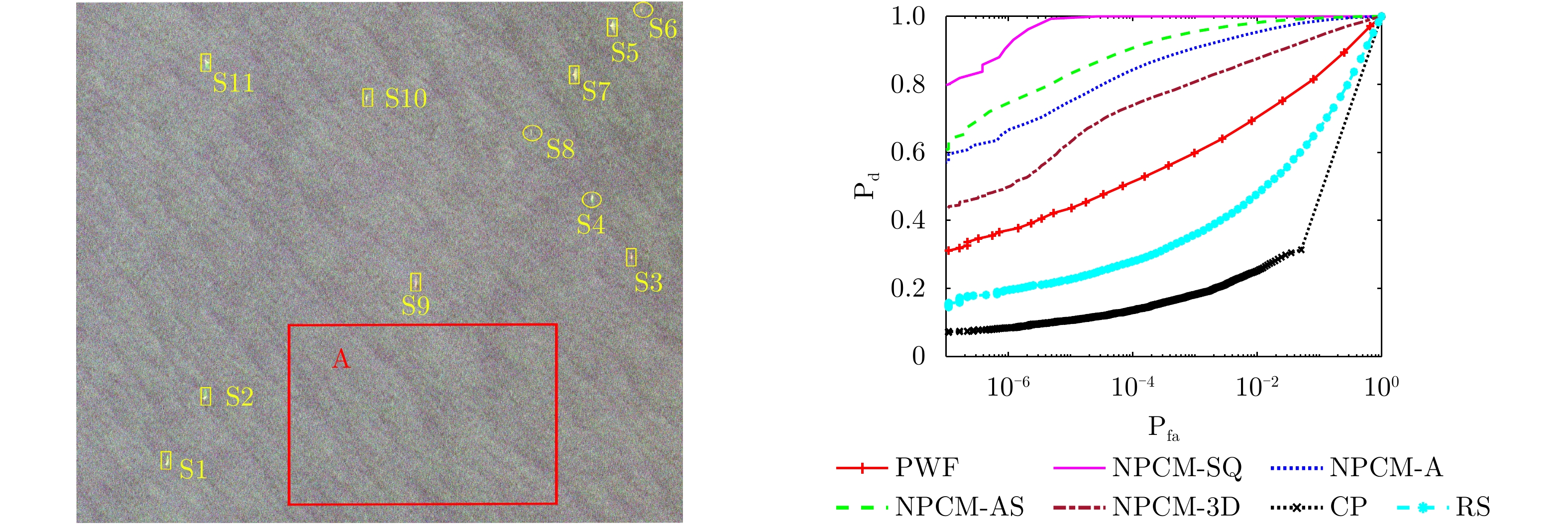
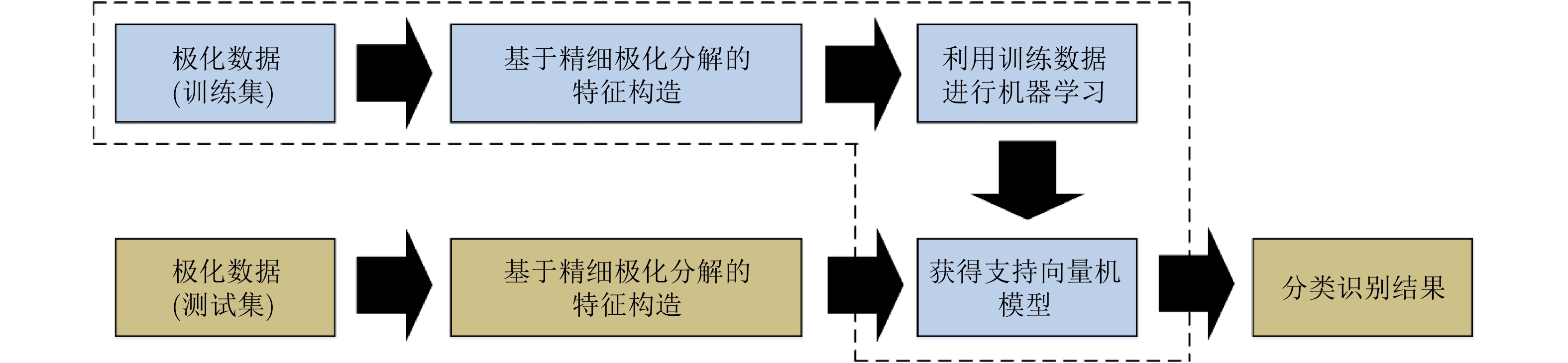
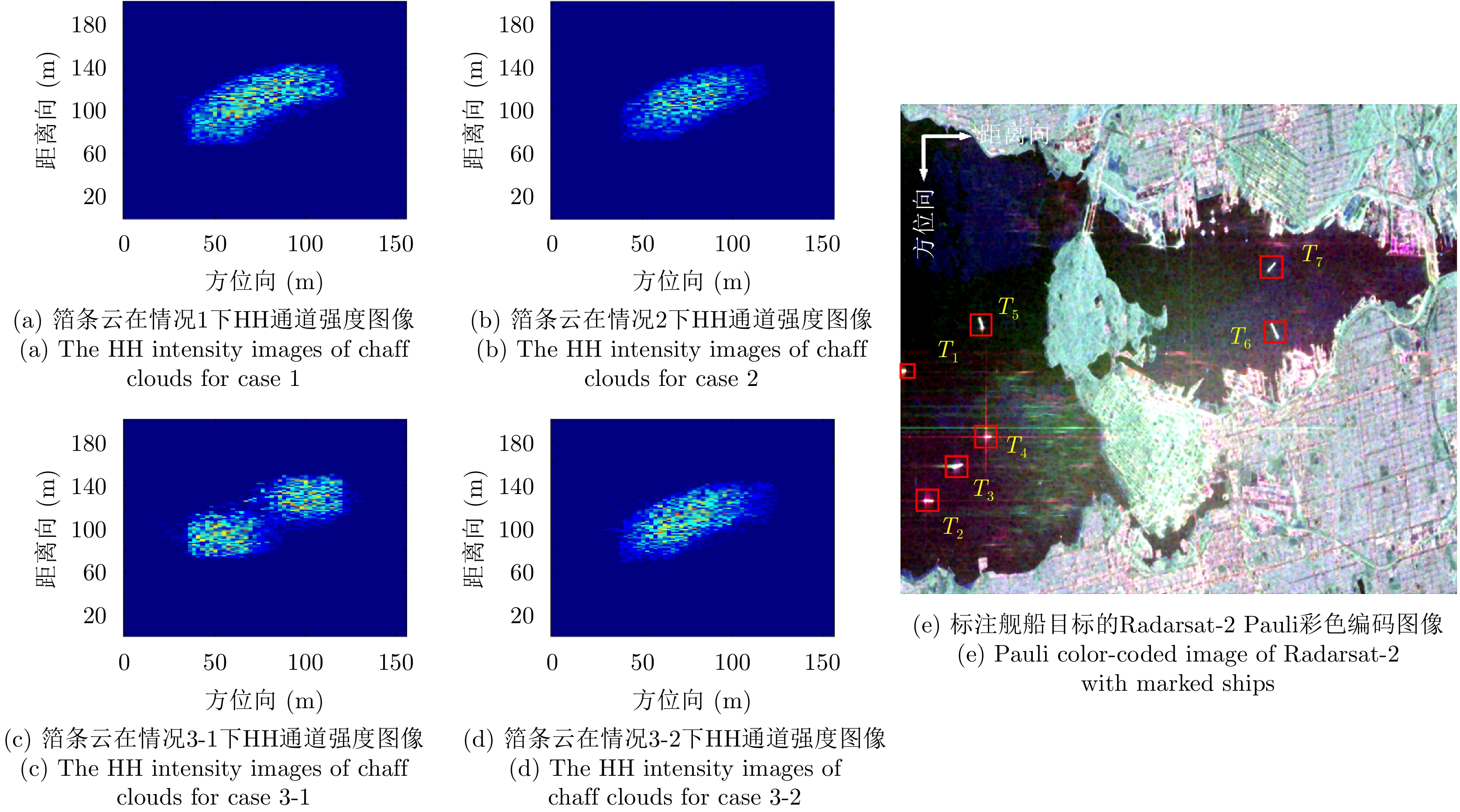
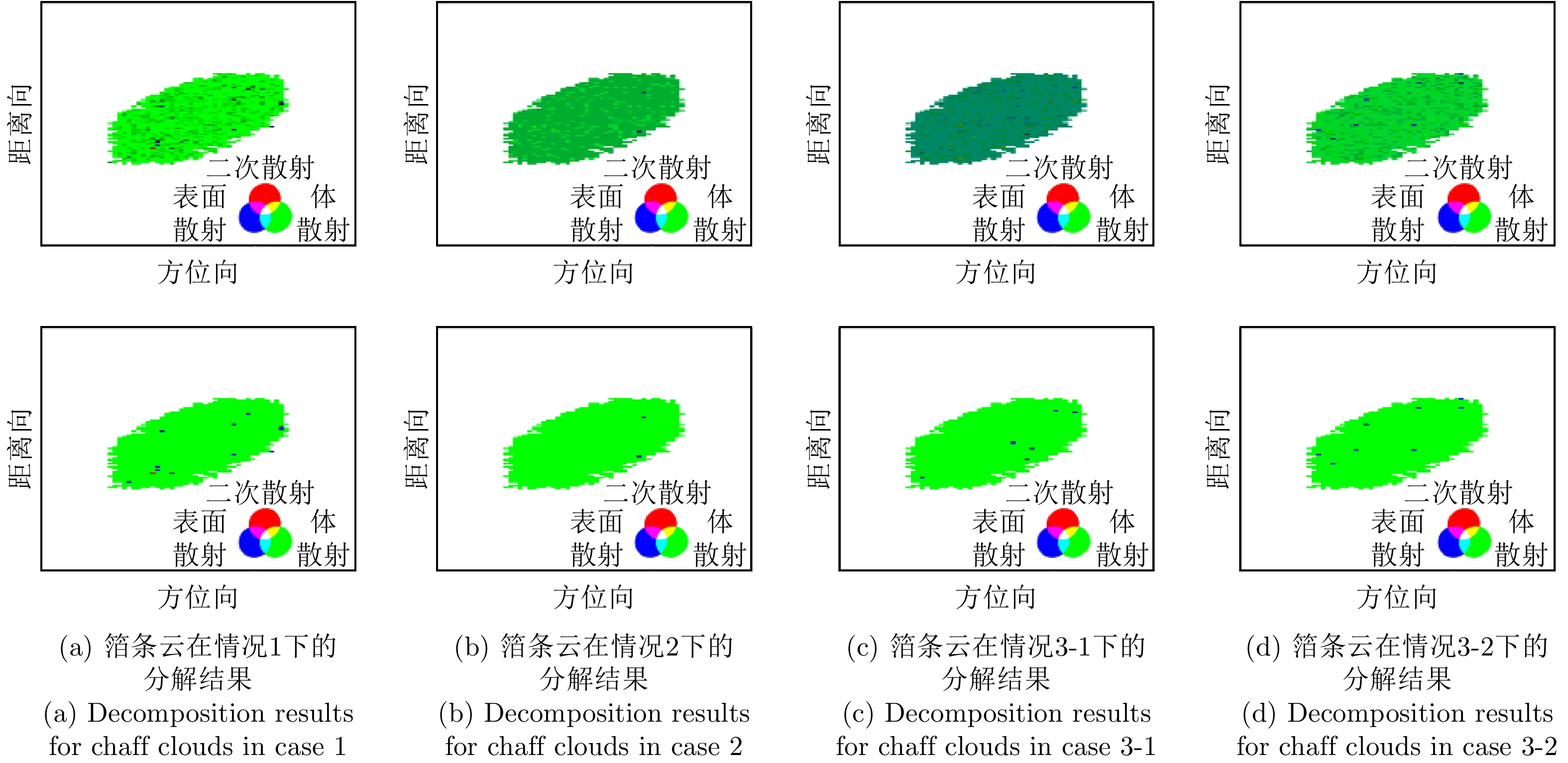
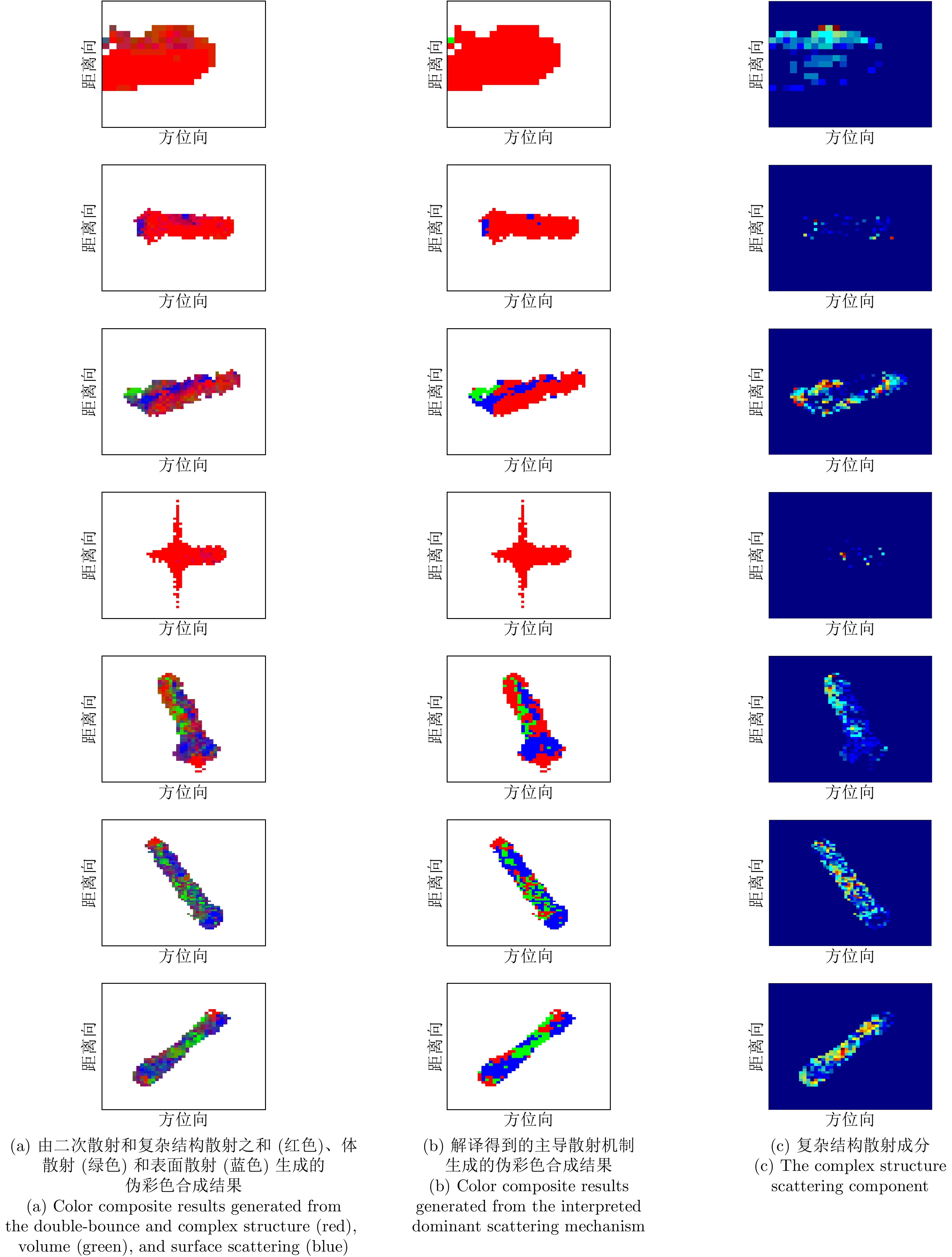
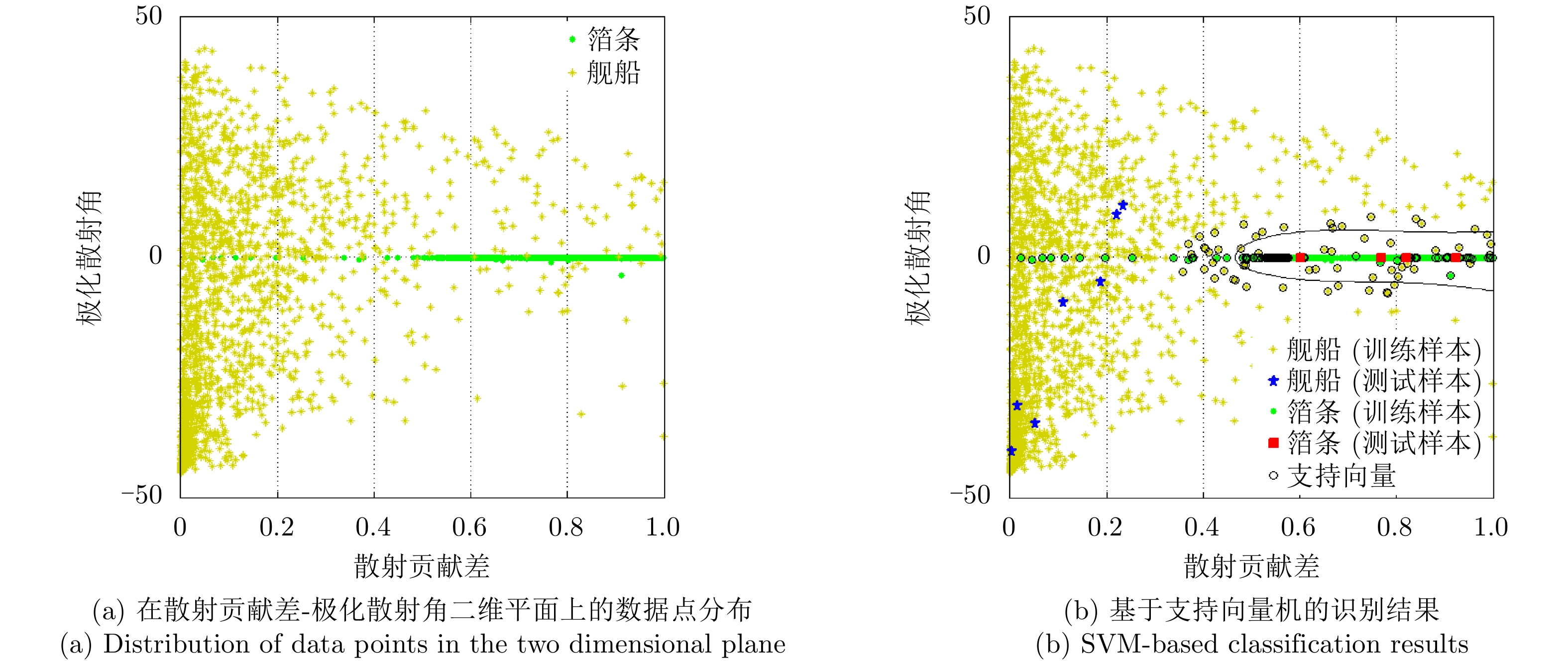
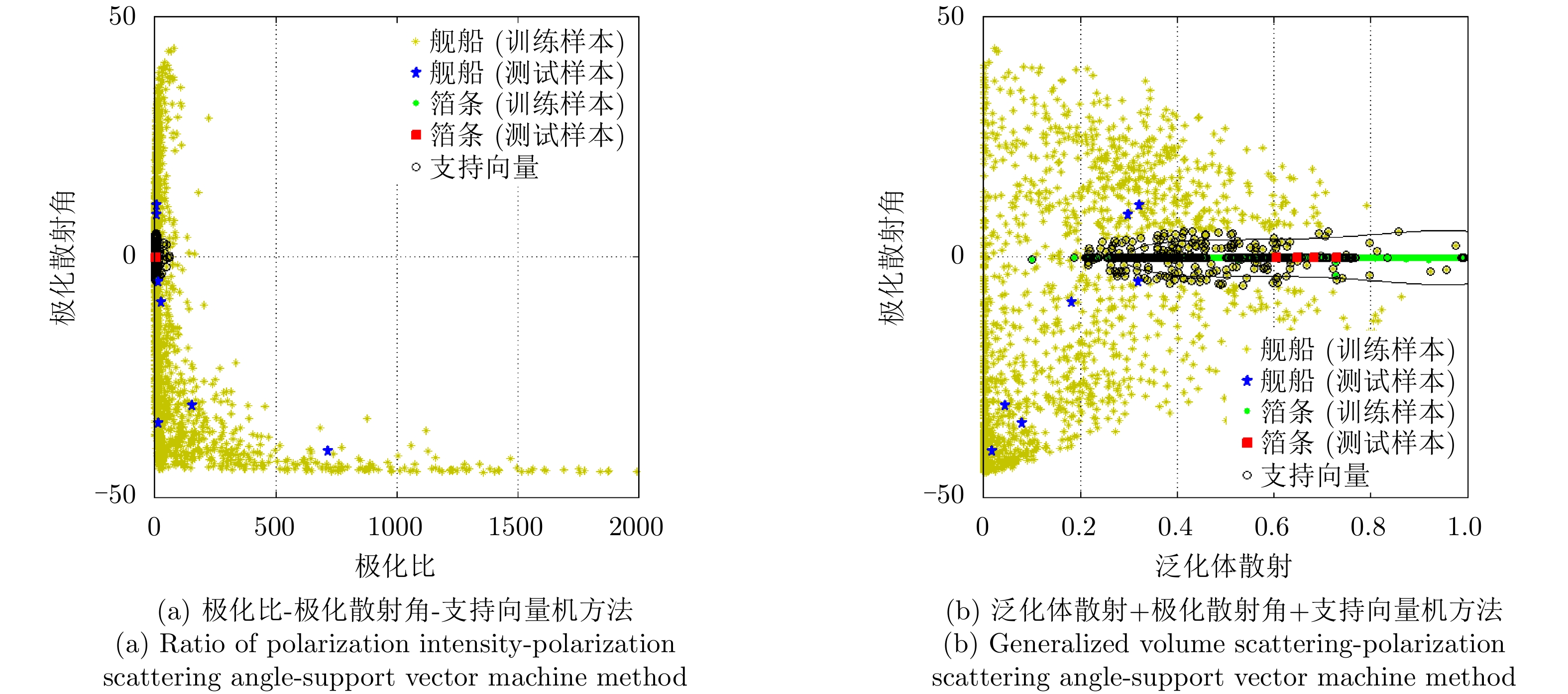
The recognition of ships from chaff cloud jamming is challenging because they have similar dimensions and radar cross sections. In this paper, we propose a polarimetric recognition technique with sophisticated polarimetric target decomposition. Three sophisticated scattering models are integrated to constitute a seven-component model-based decomposition method so as to accurately characterize the dominant and local scattering of ships. Based on the concepts of contrast and suppression, a robust scattering contribution difference feature is designed according to the derived scattering contributions. The constructed feature vector, combined with the polarization scattering angle, is inputted into the support vector machine to fulfill the recognition process. Simulated and real polarimetric radar data are utilized to test the proposed method, and the results show that the proposed method outperforms state-of-the-art methods by achieving the highest recognition rate of over 98%.
The recognition of ships from chaff cloud jamming is challenging because they have similar dimensions and radar cross sections. In this paper, we propose a polarimetric recognition technique with sophisticated polarimetric target decomposition. Three sophisticated scattering models are integrated to constitute a seven-component model-based decomposition method so as to accurately characterize the dominant and local scattering of ships. Based on the concepts of contrast and suppression, a robust scattering contribution difference feature is designed according to the derived scattering contributions. The constructed feature vector, combined with the polarization scattering angle, is inputted into the support vector machine to fulfill the recognition process. Simulated and real polarimetric radar data are utilized to test the proposed method, and the results show that the proposed method outperforms state-of-the-art methods by achieving the highest recognition rate of over 98%.




2021, 10(1): 74-85.
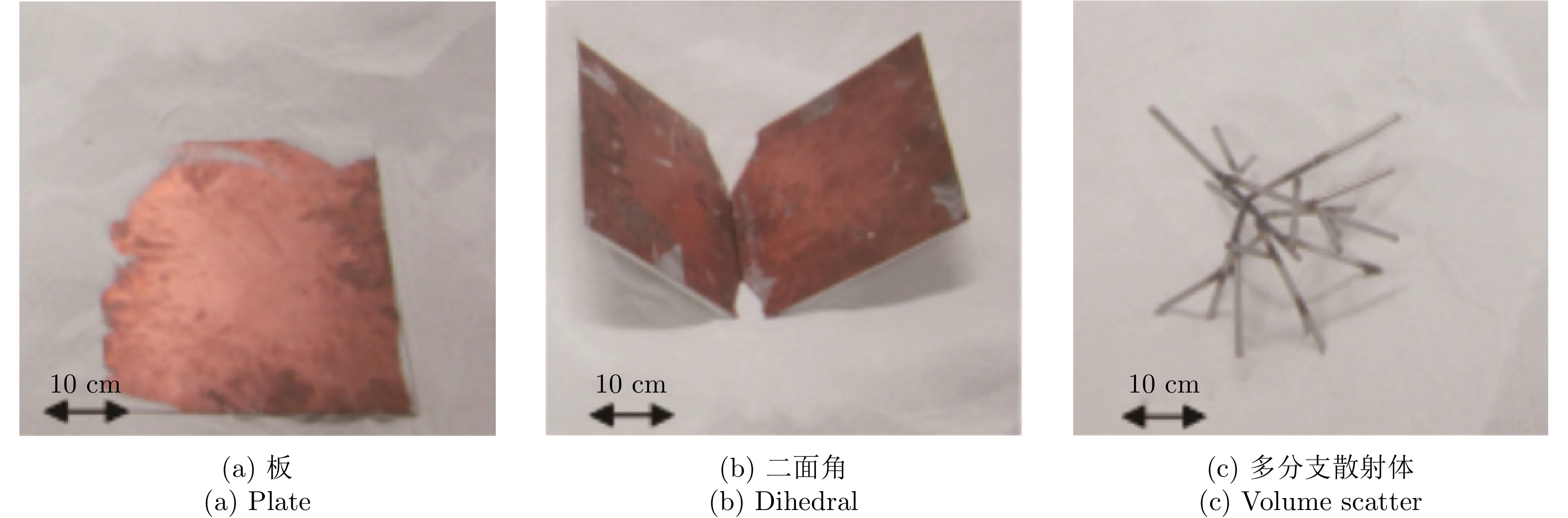
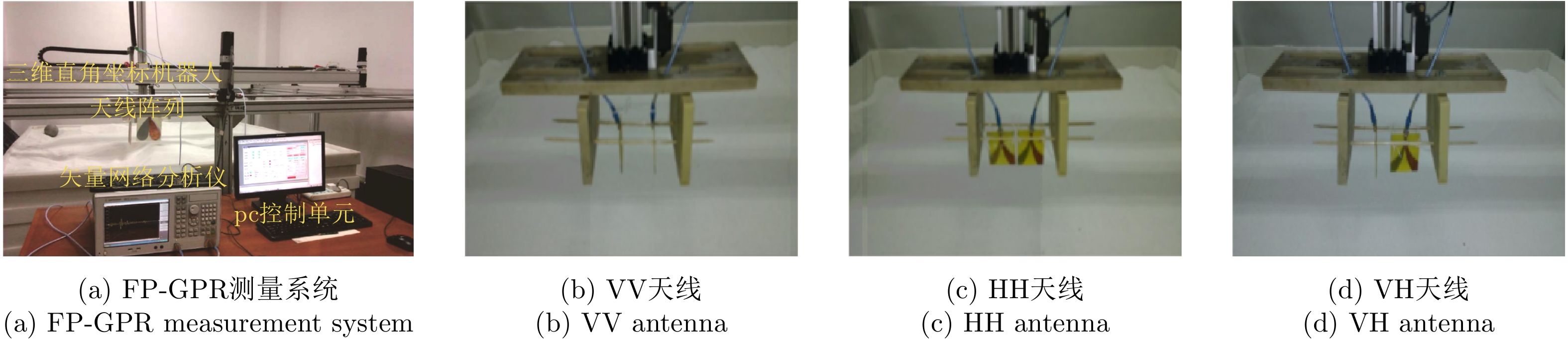
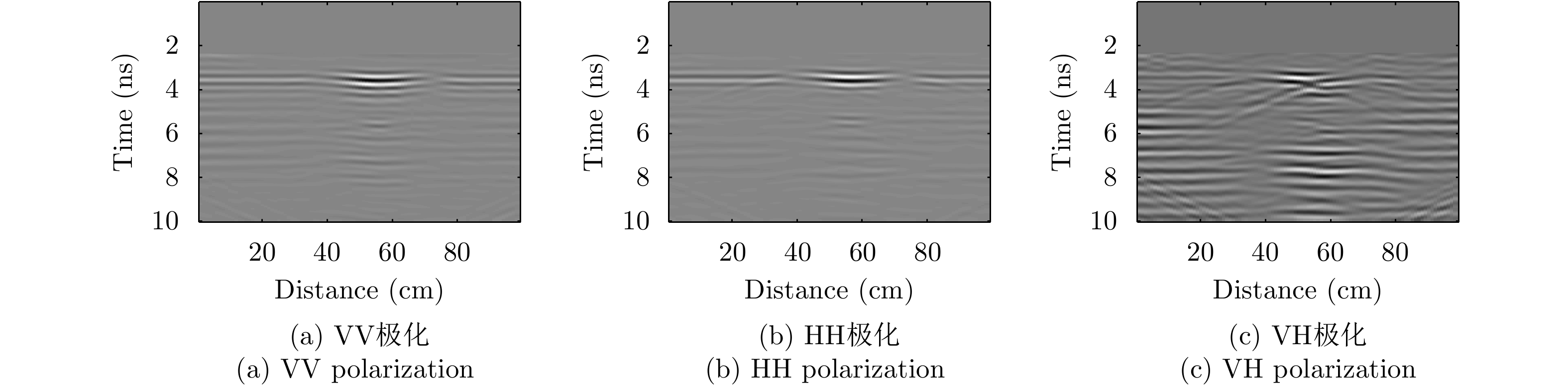
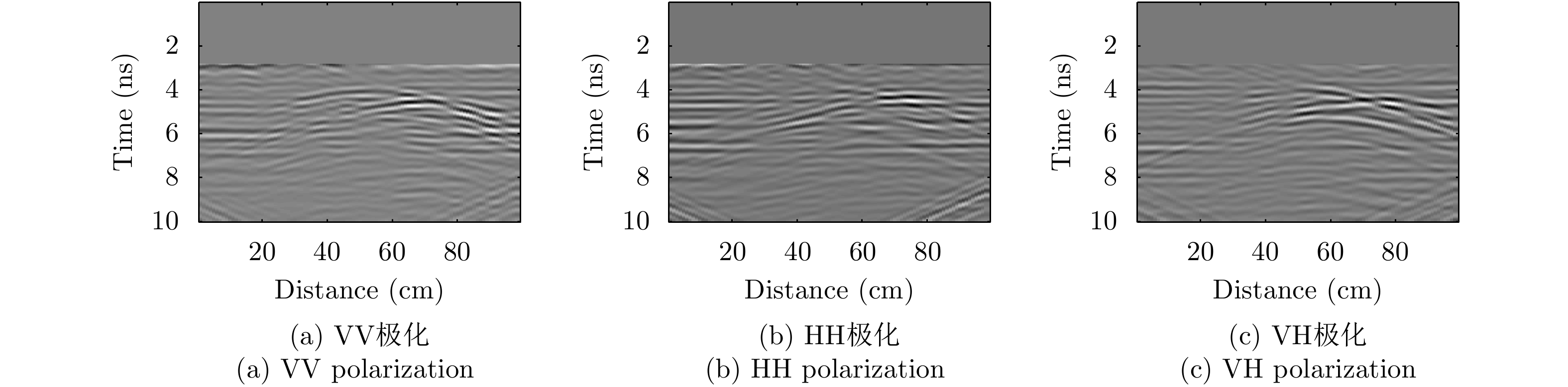
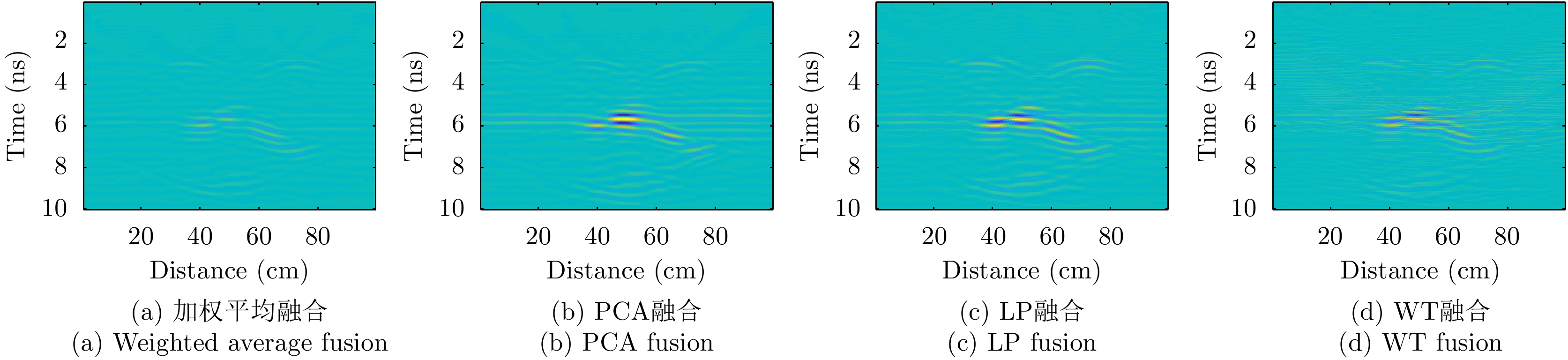
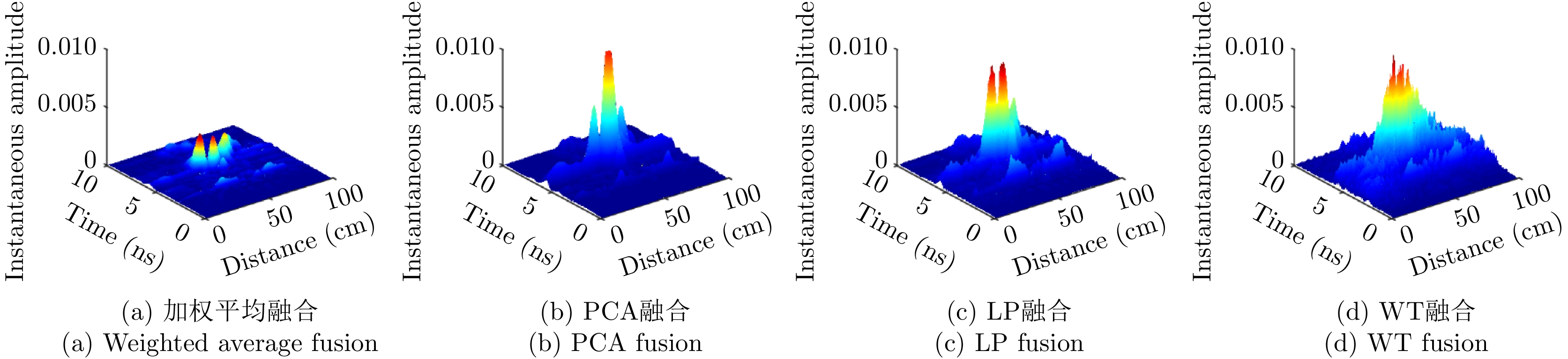
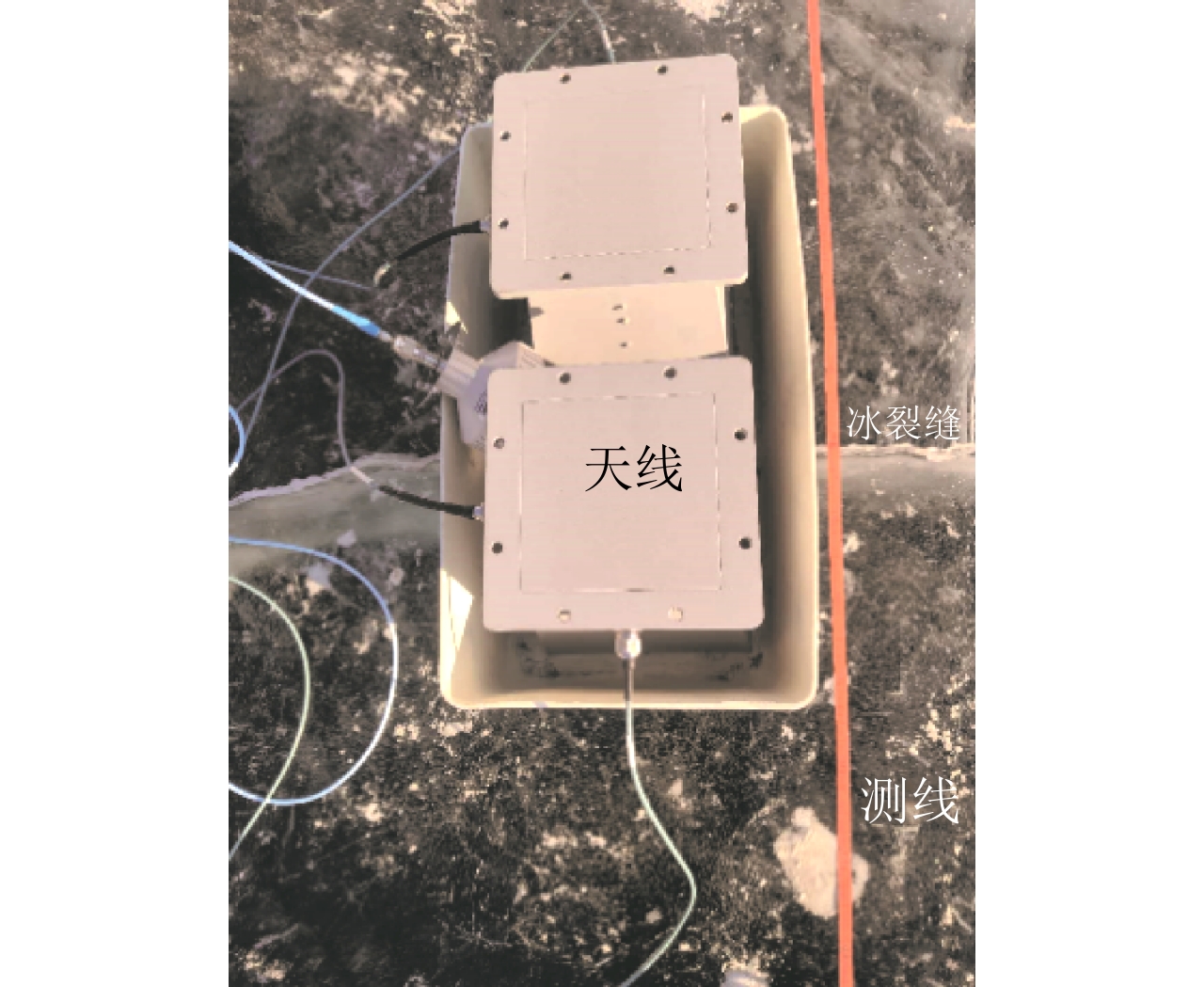
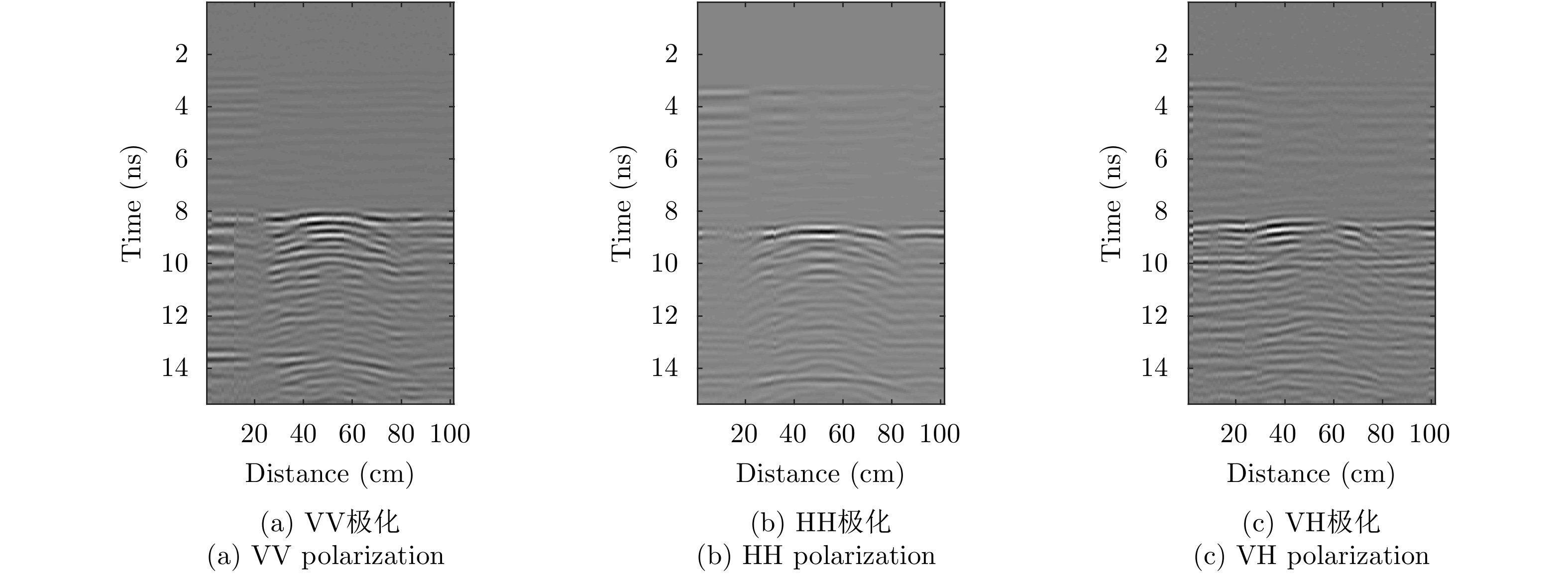
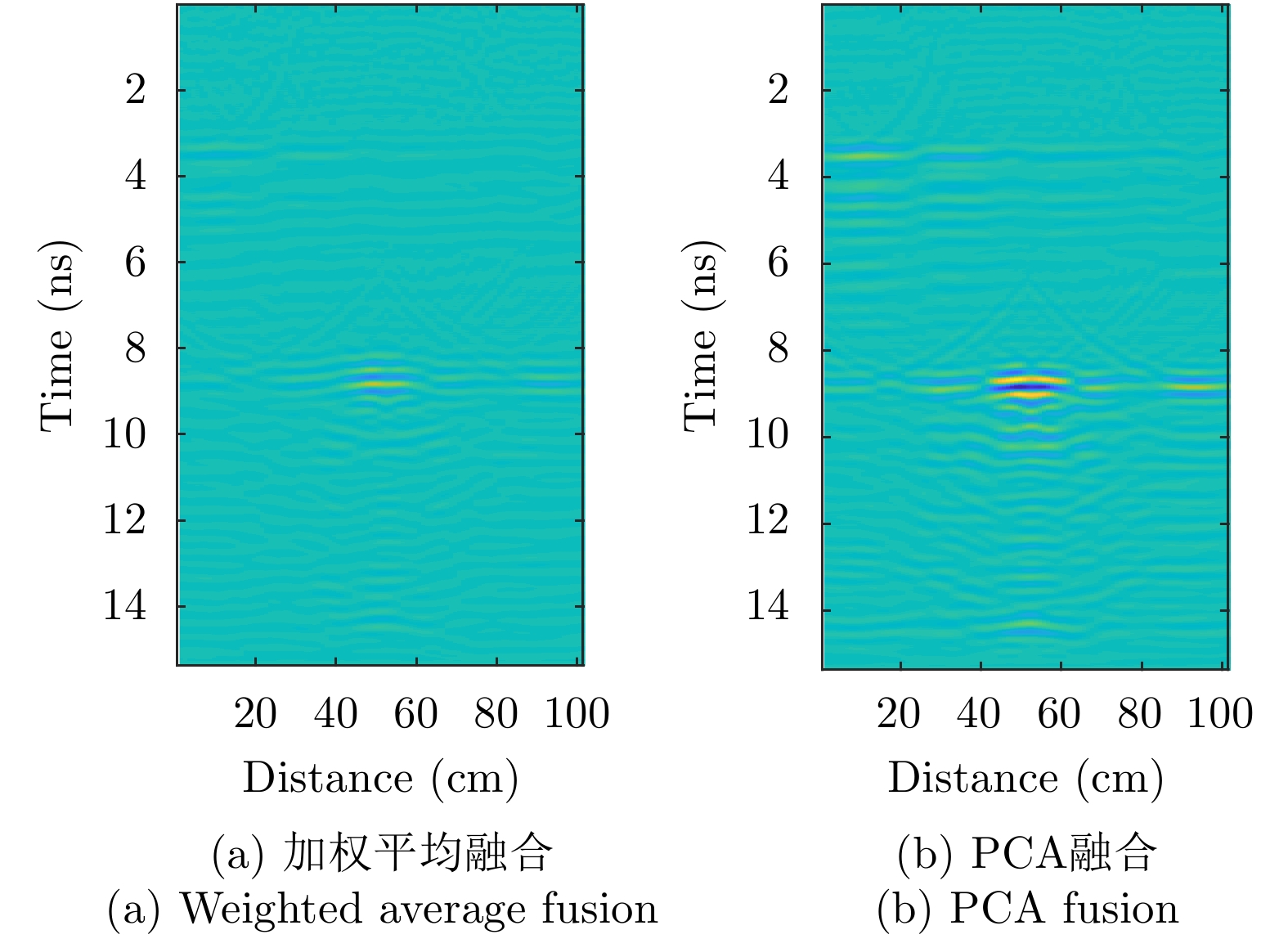
Full-Polarimetric Ground Penetrating Radar (FP-GPR), compared to traditional single-polarimetric GPR, can obtain more comprehensive polarization data (such as VV, HH, and VH) for the same target. To ensure a more comprehensive targets’ image identification, data fusion technology is applied to FP-GPR so as to combine the polarization information of three different polarization modes. However, weighted average fusion is usually employed in FP-GPR data fusion, since it masks the advantages of full polarization and is unable to simultaneously adapt to different target scattering mechanisms. Based on Principal Component Analysis (PCA), Laplacian Pyramid (LP), and multi-scale Wavelet Transform (WT), this research proposes three FP-GPR data fusion methods. To check the reliability of several data fusion methods, we obtained FP-GPR data representing three different target scattering mechanisms in the laboratory and, then, compared the weighted average fusion method with the other three methods using instantaneous amplitude and gradient. The result shows that the three methods were better than the weighted average fusion and that they can be adapted to different target scattering mechanisms. However, PCA was used to fuse the unknown target scattering mechanisms. Finally, PCA fusion is applied to actual ice fracture data imaging, as it produces a better fusion effect than that of weighted average fusion.
Full-Polarimetric Ground Penetrating Radar (FP-GPR), compared to traditional single-polarimetric GPR, can obtain more comprehensive polarization data (such as VV, HH, and VH) for the same target. To ensure a more comprehensive targets’ image identification, data fusion technology is applied to FP-GPR so as to combine the polarization information of three different polarization modes. However, weighted average fusion is usually employed in FP-GPR data fusion, since it masks the advantages of full polarization and is unable to simultaneously adapt to different target scattering mechanisms. Based on Principal Component Analysis (PCA), Laplacian Pyramid (LP), and multi-scale Wavelet Transform (WT), this research proposes three FP-GPR data fusion methods. To check the reliability of several data fusion methods, we obtained FP-GPR data representing three different target scattering mechanisms in the laboratory and, then, compared the weighted average fusion method with the other three methods using instantaneous amplitude and gradient. The result shows that the three methods were better than the weighted average fusion and that they can be adapted to different target scattering mechanisms. However, PCA was used to fuse the unknown target scattering mechanisms. Finally, PCA fusion is applied to actual ice fracture data imaging, as it produces a better fusion effect than that of weighted average fusion.











2021, 10(1): 86-99.
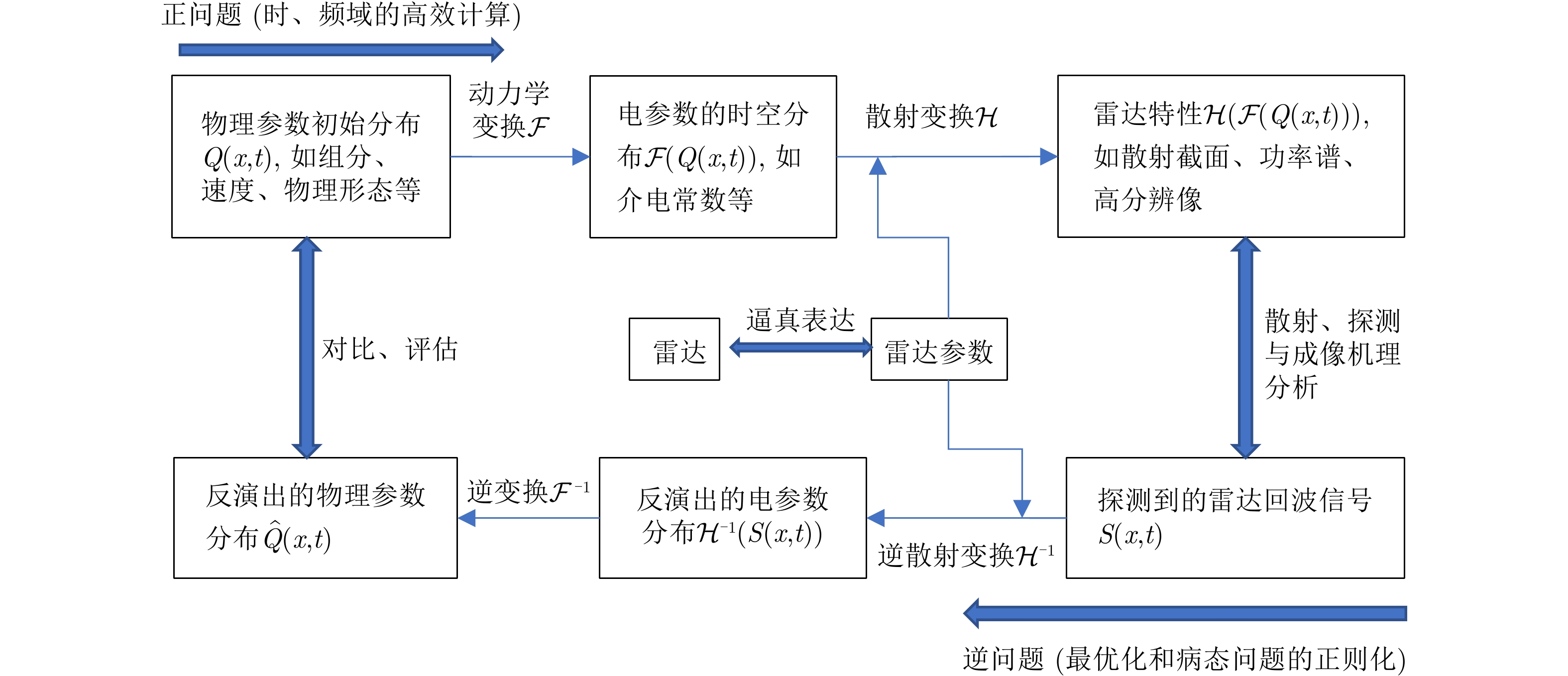
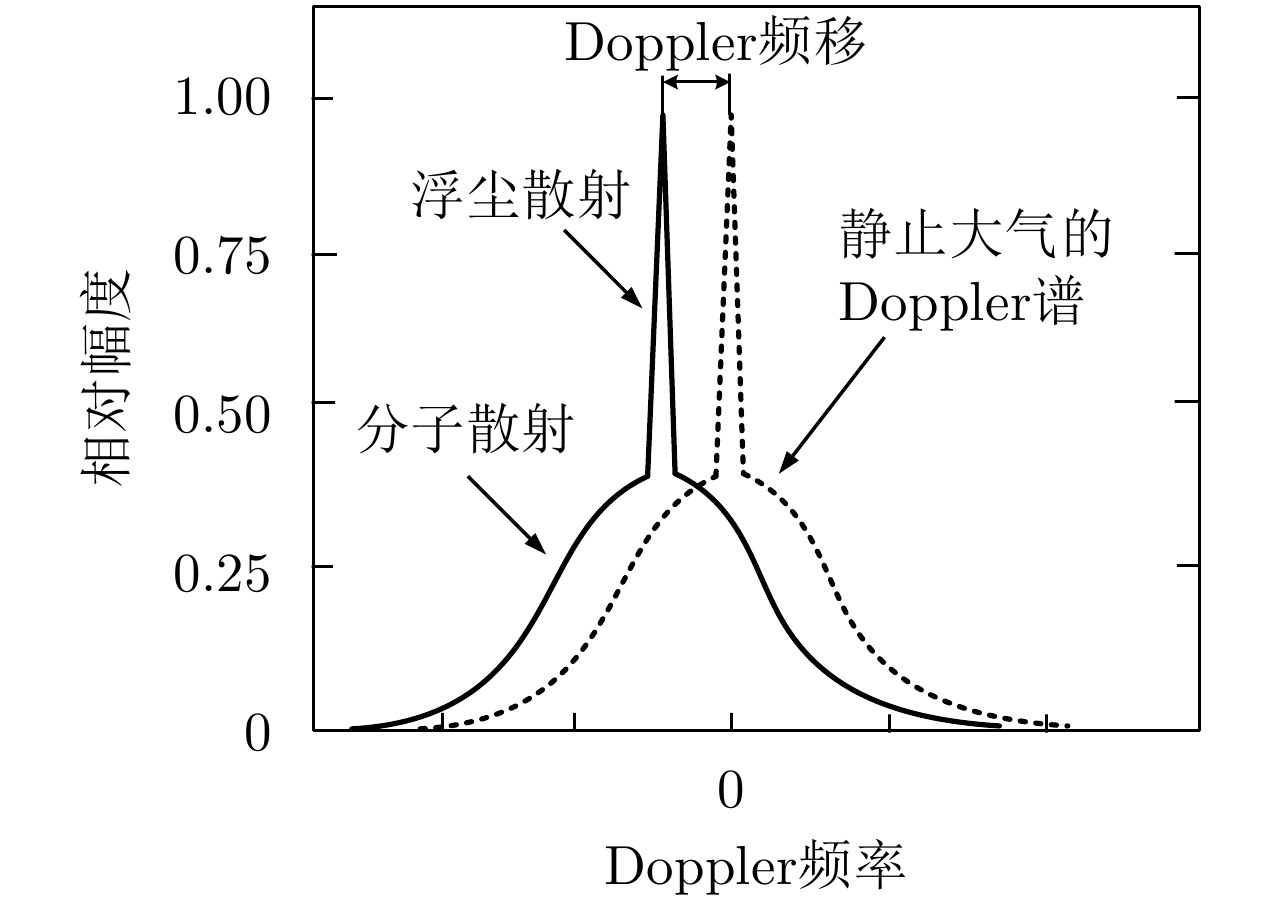
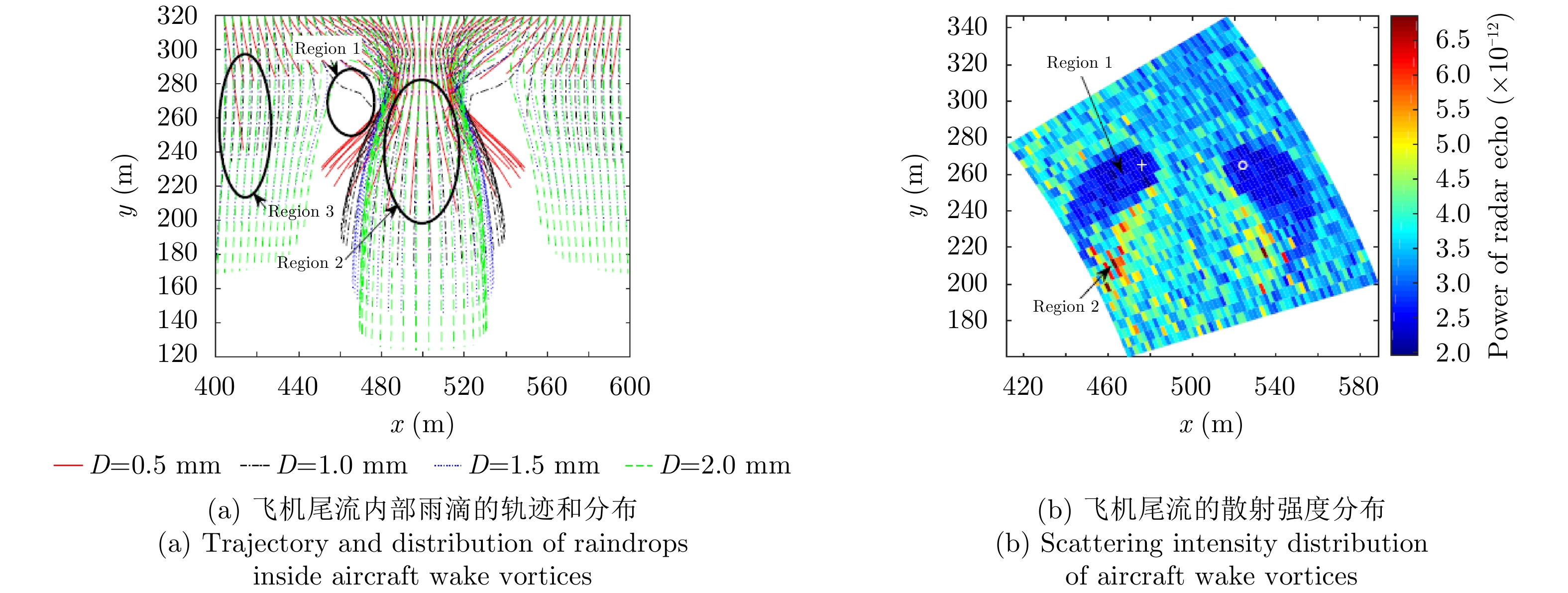
Distributed soft target refers to nonrigid target or a target group with wide distribution range, time-varying spatial distribution, or internal relative motion. This type of target is currently attracting considerable interest in the radar field, and the research on its radar characteristics and sensing technology is a typical interdisciplinary problem. To help the radar technicians better understand the related technologies, this study introduces the dynamics, scattering/transmission, radar characteristics, detection, and parameter retrieval of this type of target in continuous and discrete forms, as regards the positive and inverse problems. Considering the aircraft wake vortex as an example, the radar characteristics and sensing technology of this type of target are illustrated, which can serve as a good reference for the development of related radar detection technologies.
Distributed soft target refers to nonrigid target or a target group with wide distribution range, time-varying spatial distribution, or internal relative motion. This type of target is currently attracting considerable interest in the radar field, and the research on its radar characteristics and sensing technology is a typical interdisciplinary problem. To help the radar technicians better understand the related technologies, this study introduces the dynamics, scattering/transmission, radar characteristics, detection, and parameter retrieval of this type of target in continuous and discrete forms, as regards the positive and inverse problems. Considering the aircraft wake vortex as an example, the radar characteristics and sensing technology of this type of target are illustrated, which can serve as a good reference for the development of related radar detection technologies.


2021, 10(1): 100-115.
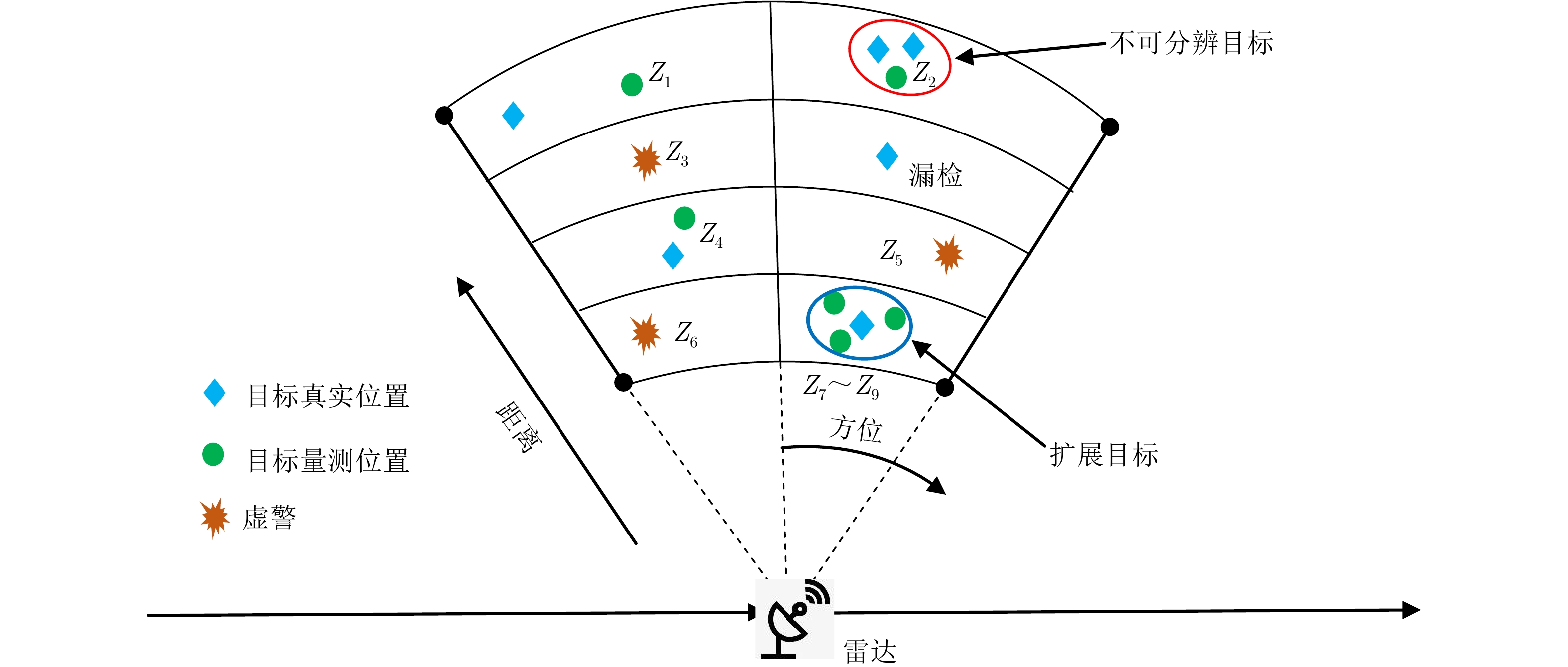
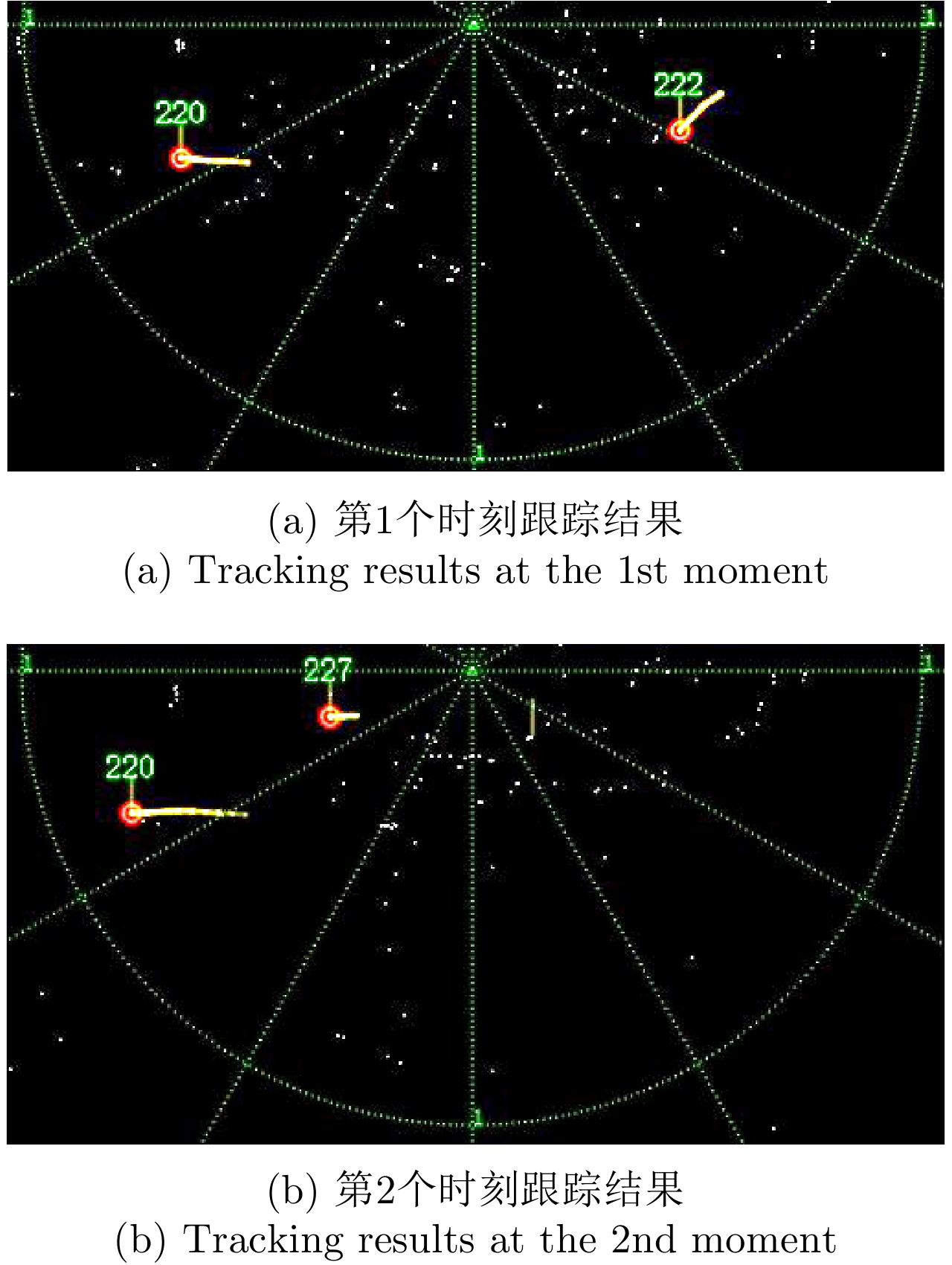
Multi-Target Tracking (MTT) is a difficult task in radar data processing. When compared to tracking in various fields or scenario, Maritime MTT (MMTT) is a challenging one and also a daunting task. On one hand, low signal-to-clutter ratio in the highly complex marine environment limits the detection performance for small targets at sea, and the plots obtained by the detector contain missing detections and a large number of false alarms, which make MTT much more difficult. On the other hand, when marine targets are moving in the form of multiple groups, or when the high resolution radar is used in marine detection applications, the measurements of the target pave the way to show efficiently the distribution characteristics of occupying multiple cells. In this case, using of conventional MTT methods is not ideal as their performance is not effective as desired. Currently, the number of papers on MMTT at home and abroad is very limited, and most of them only focus on a single target. This paper summarizes the use of MMTT algorithms based on four methods: conventional MTT method, amplitude aided MTT method, multi-target track-before-detect method, and multiple extended target-tracking method. In addition, this paper also considers and analyzes the future perspective of MMTT comprehensively.
Multi-Target Tracking (MTT) is a difficult task in radar data processing. When compared to tracking in various fields or scenario, Maritime MTT (MMTT) is a challenging one and also a daunting task. On one hand, low signal-to-clutter ratio in the highly complex marine environment limits the detection performance for small targets at sea, and the plots obtained by the detector contain missing detections and a large number of false alarms, which make MTT much more difficult. On the other hand, when marine targets are moving in the form of multiple groups, or when the high resolution radar is used in marine detection applications, the measurements of the target pave the way to show efficiently the distribution characteristics of occupying multiple cells. In this case, using of conventional MTT methods is not ideal as their performance is not effective as desired. Currently, the number of papers on MMTT at home and abroad is very limited, and most of them only focus on a single target. This paper summarizes the use of MMTT algorithms based on four methods: conventional MTT method, amplitude aided MTT method, multi-target track-before-detect method, and multiple extended target-tracking method. In addition, this paper also considers and analyzes the future perspective of MMTT comprehensively.

2021, 10(1): 116-130.
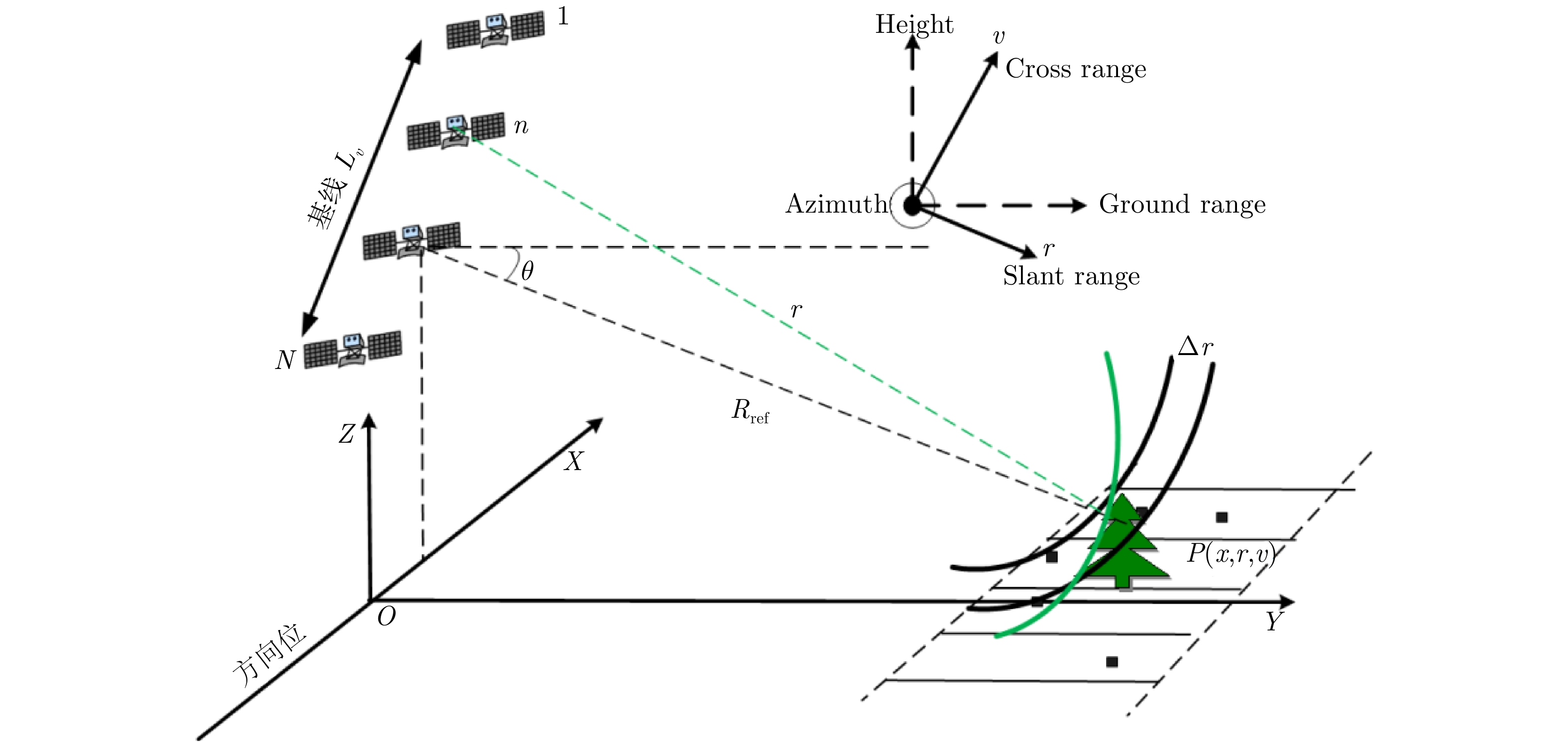
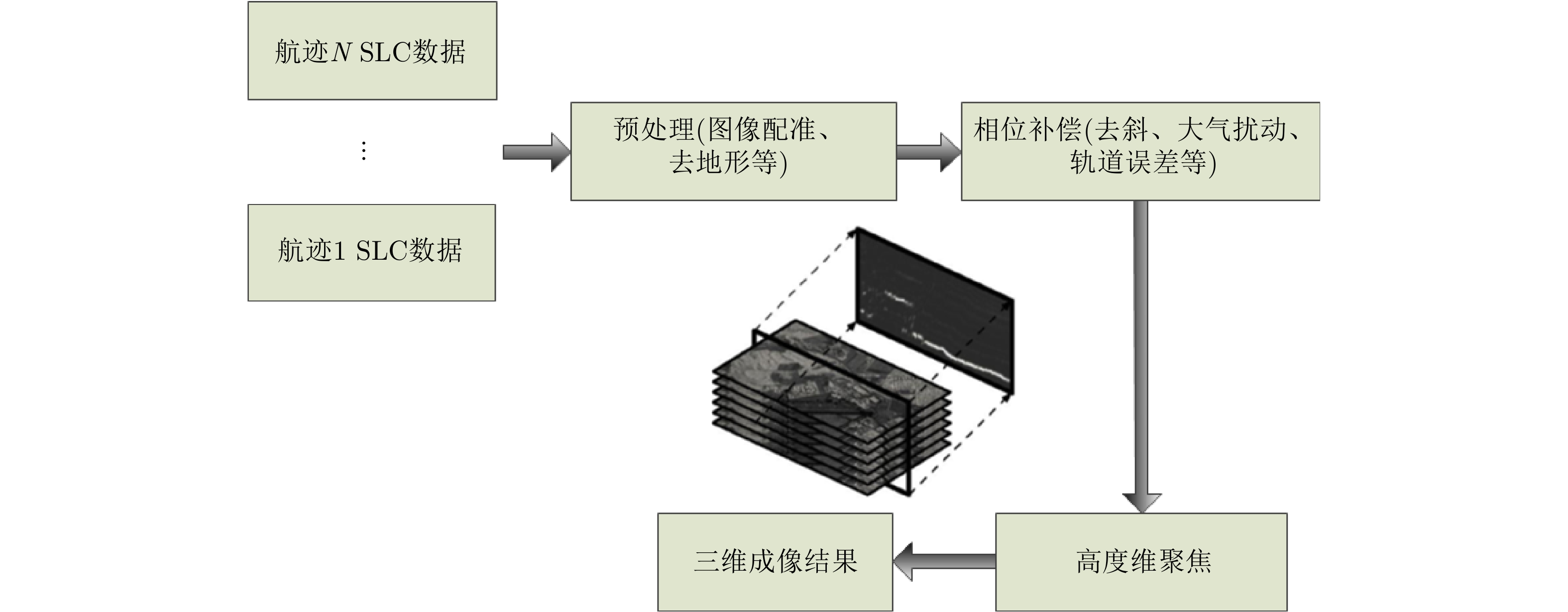
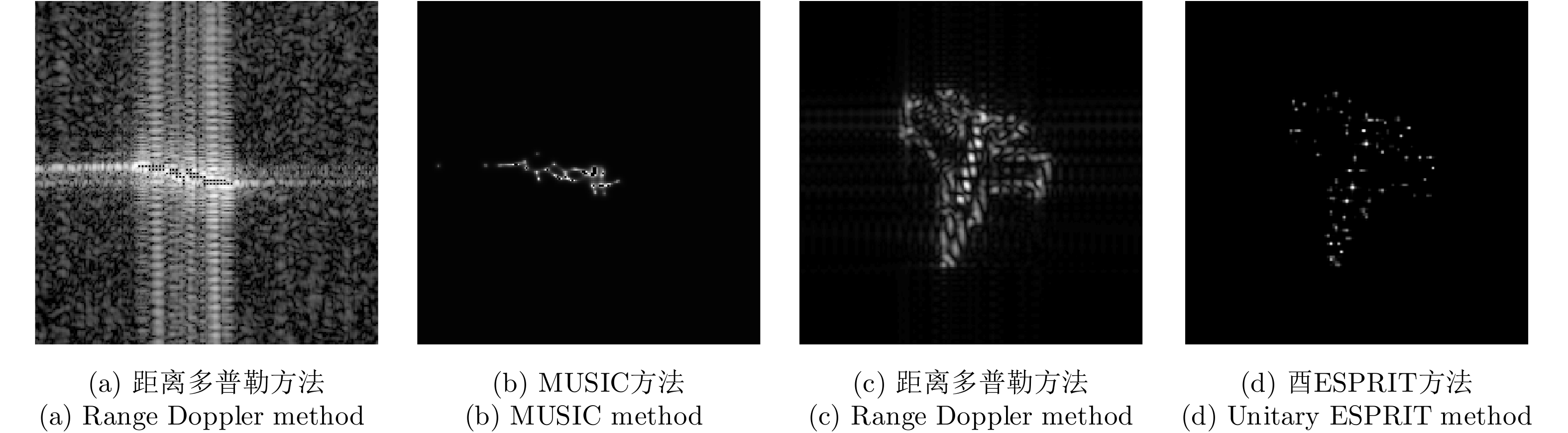
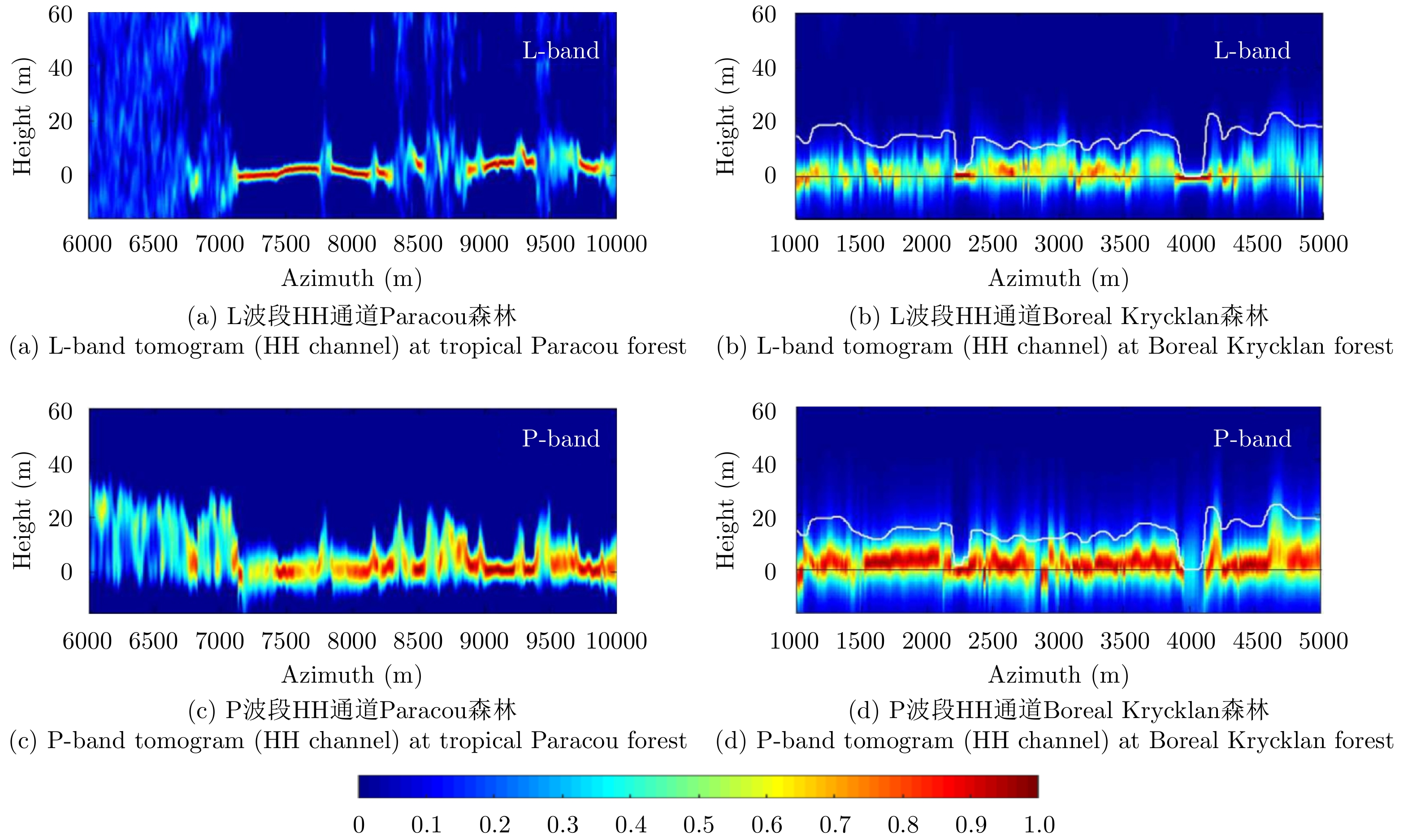
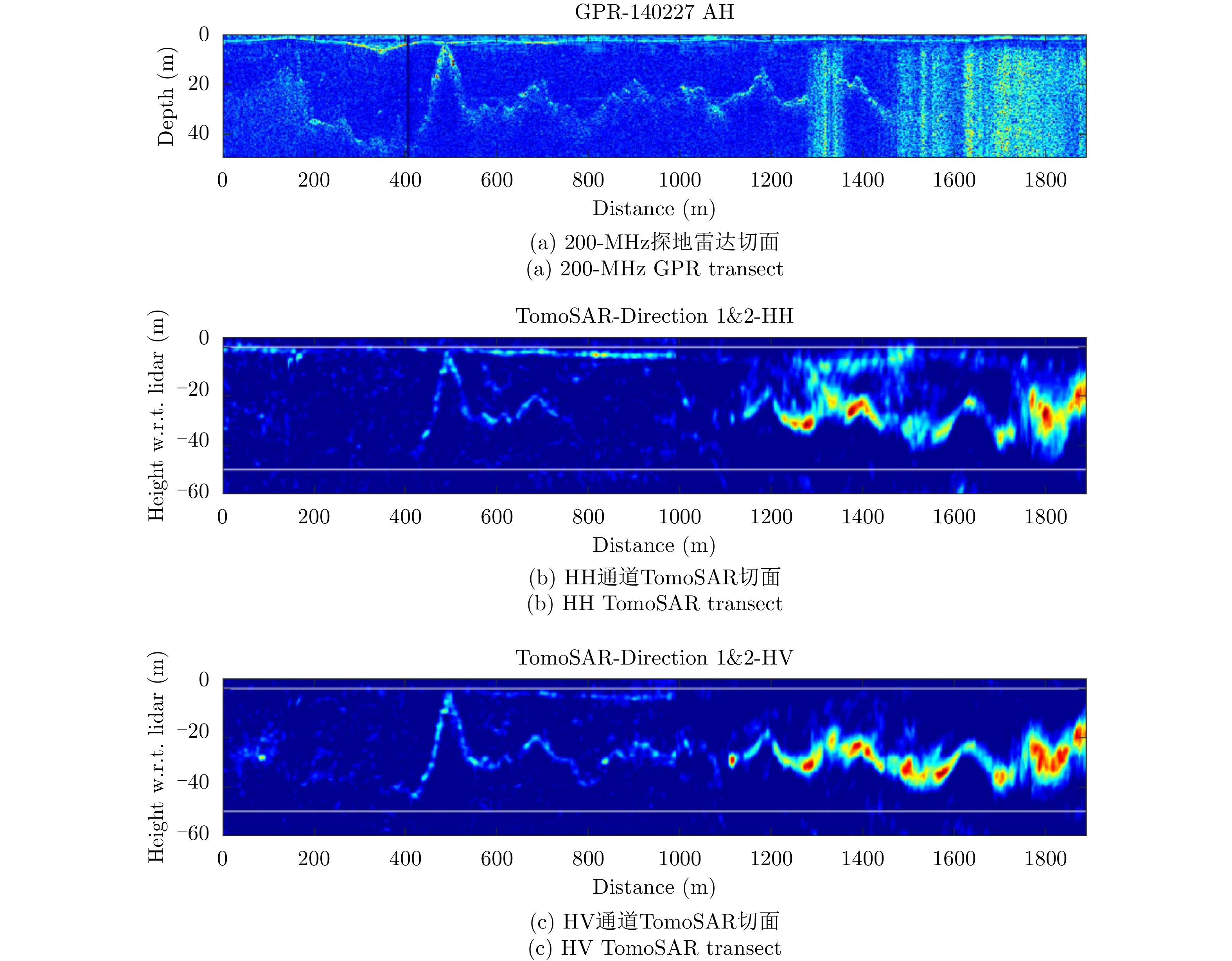
Traditional Synthetic Aperture Radar (SAR) imaging is the projection of a real three-dimensional scene onto a two-dimensional domain of azimuth and slant range, which results in the loss of the high-dimensional information. With the advancement of SAR system and its processing technology, tomographic SAR systems obtain multiple data along the height direction to construct the high-dimensional synthetic aperture, and use array signal processing methods to achieve high-resolution three-dimensional images. It can reconstruct the observation scene and extract vertical structure information of the ground target, which is very important for vegetation monitoring, snow and ice detecting, and urban modeling. This paper analyzed the key steps of three-dimensional imaging, such as image registration, flat-earth phase removal, phase compensation, and the three-dimensional focusing, as well as the current research status of each step based on the observation mechanism of tomographic SAR system. This paper particularly focuses on using tomographic SAR on the application of vegetation, glacier, snow, and urban information. The most relevant experimental results in the past two decades were introduced. Further, the application potential and existing problems related to the vegetation height with canopy structure, glacier thickness with internal structure, snow thickness with stratification, and urban three-dimensional reconstruction with deformation monitoring under different platforms are discussed. Finally, the prospects of TomoSAR in the primary applications field are presented.
Traditional Synthetic Aperture Radar (SAR) imaging is the projection of a real three-dimensional scene onto a two-dimensional domain of azimuth and slant range, which results in the loss of the high-dimensional information. With the advancement of SAR system and its processing technology, tomographic SAR systems obtain multiple data along the height direction to construct the high-dimensional synthetic aperture, and use array signal processing methods to achieve high-resolution three-dimensional images. It can reconstruct the observation scene and extract vertical structure information of the ground target, which is very important for vegetation monitoring, snow and ice detecting, and urban modeling. This paper analyzed the key steps of three-dimensional imaging, such as image registration, flat-earth phase removal, phase compensation, and the three-dimensional focusing, as well as the current research status of each step based on the observation mechanism of tomographic SAR system. This paper particularly focuses on using tomographic SAR on the application of vegetation, glacier, snow, and urban information. The most relevant experimental results in the past two decades were introduced. Further, the application potential and existing problems related to the vegetation height with canopy structure, glacier thickness with internal structure, snow thickness with stratification, and urban three-dimensional reconstruction with deformation monitoring under different platforms are discussed. Finally, the prospects of TomoSAR in the primary applications field are presented.


2021, 10(1): 131-142.
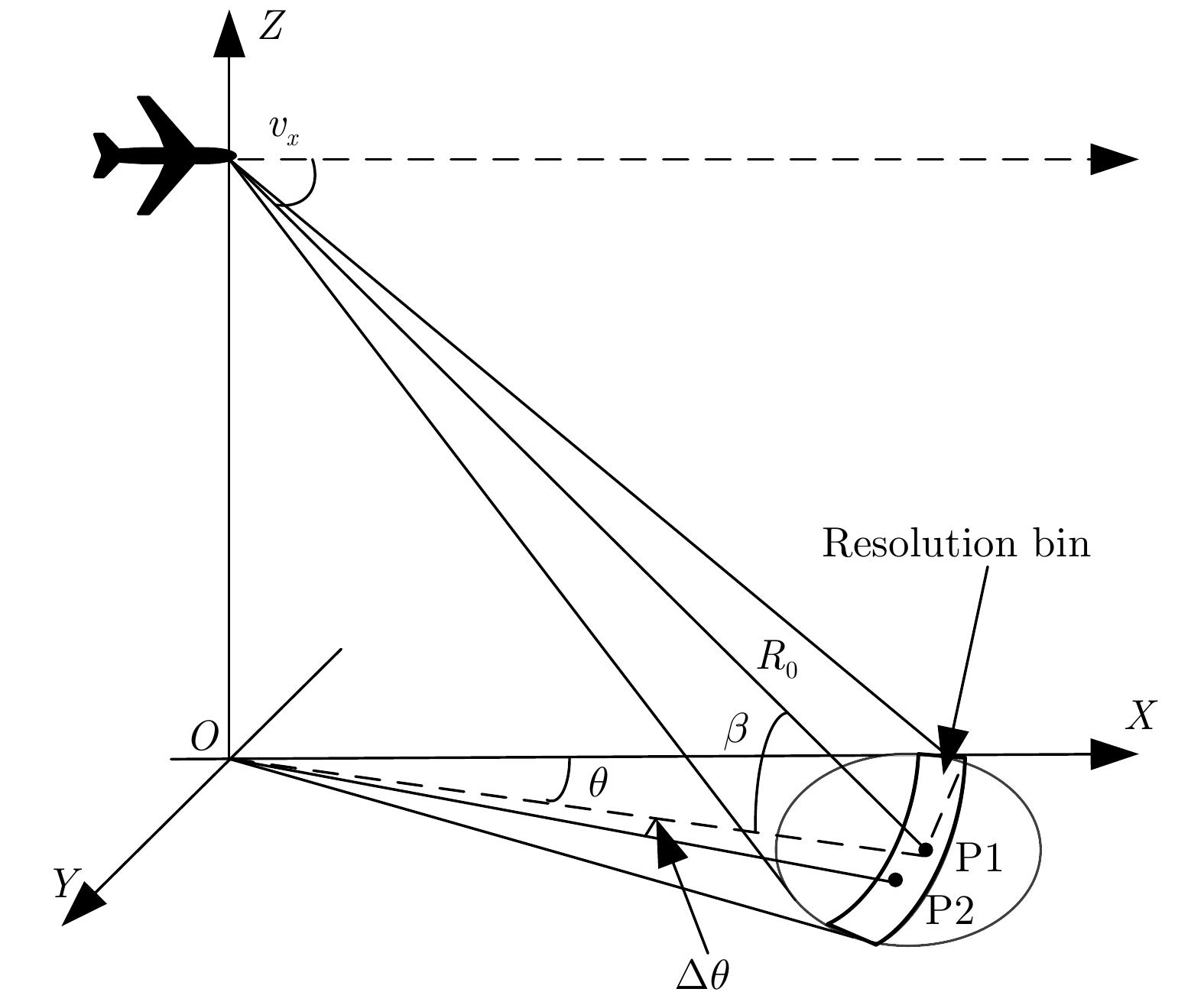
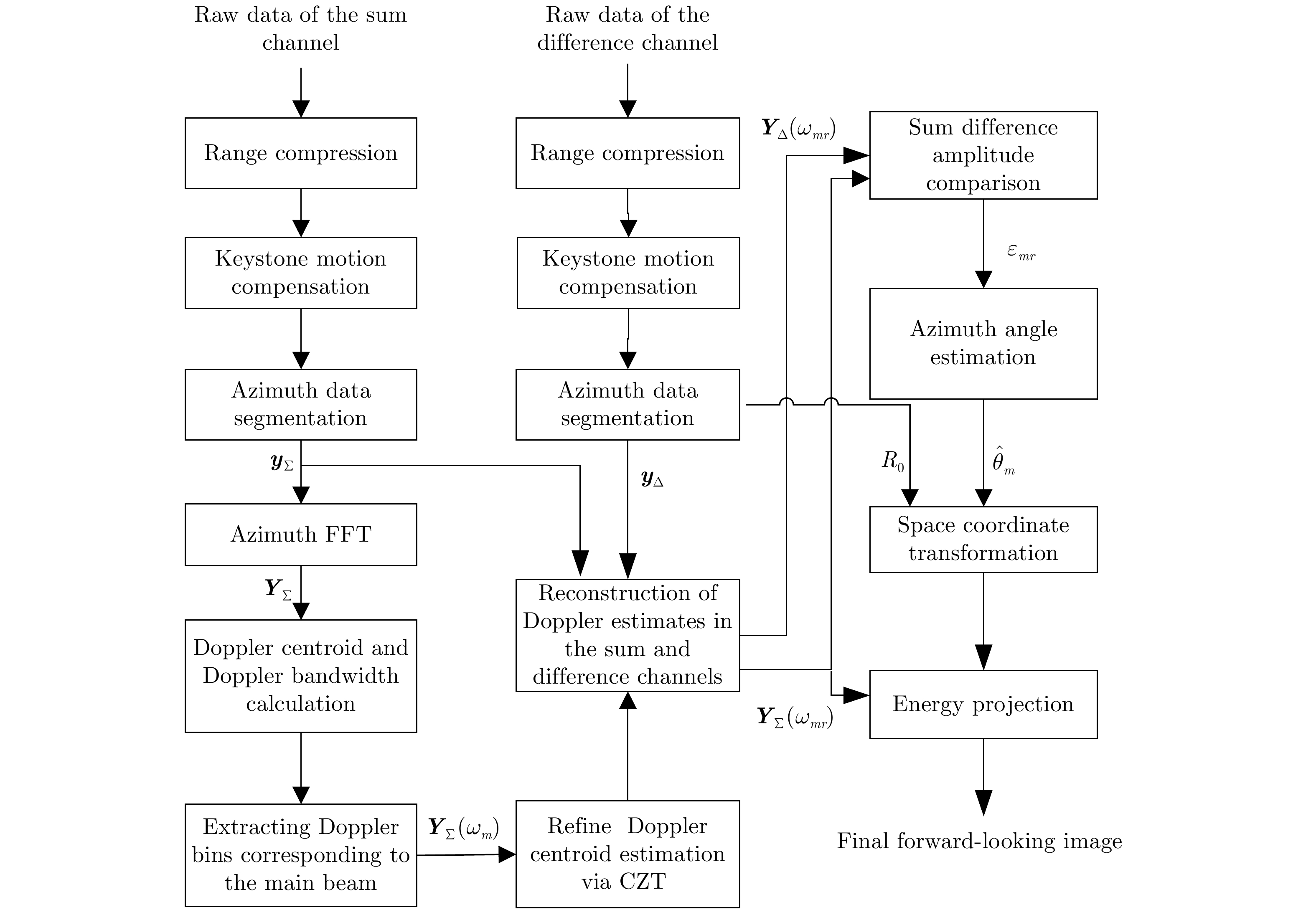
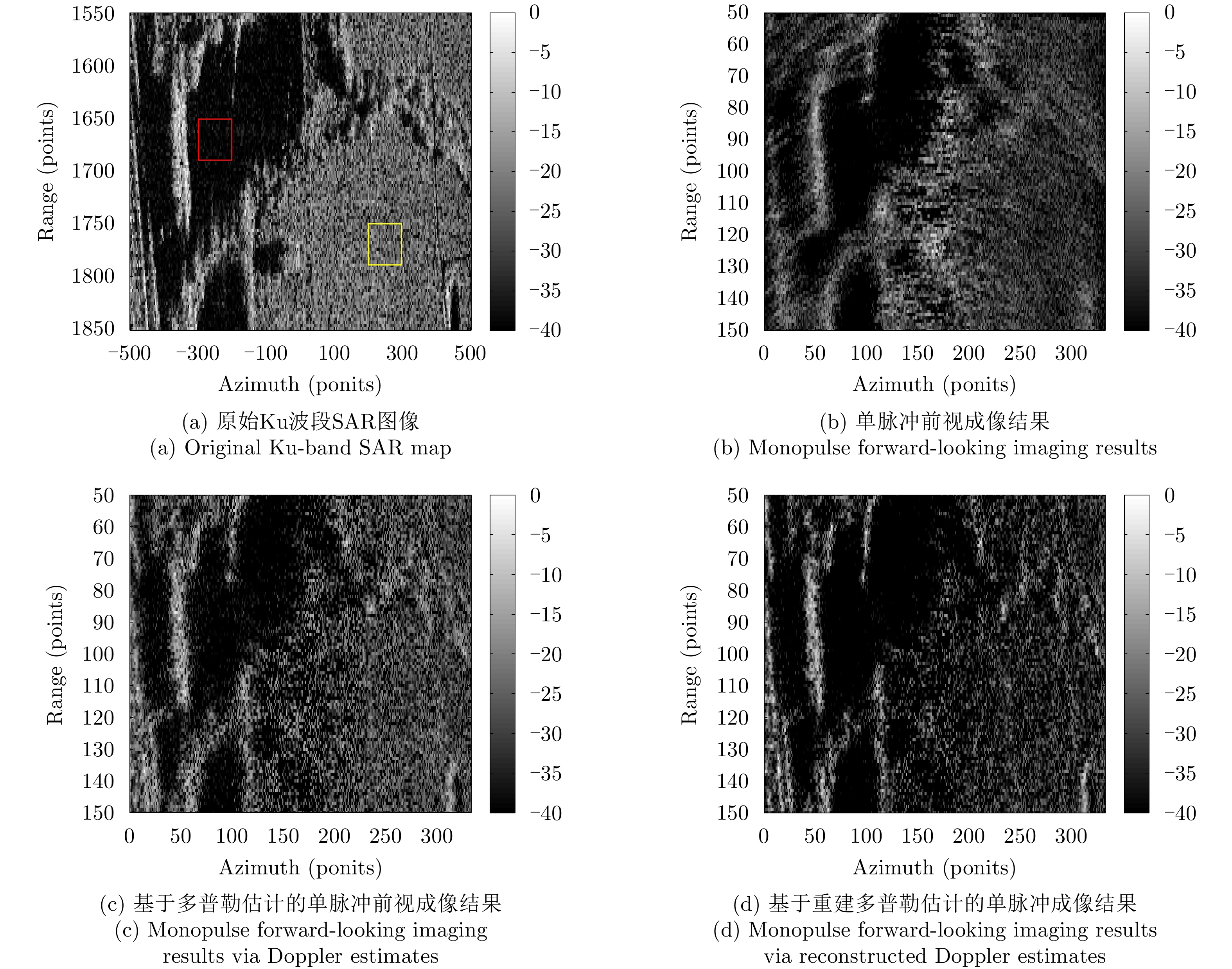
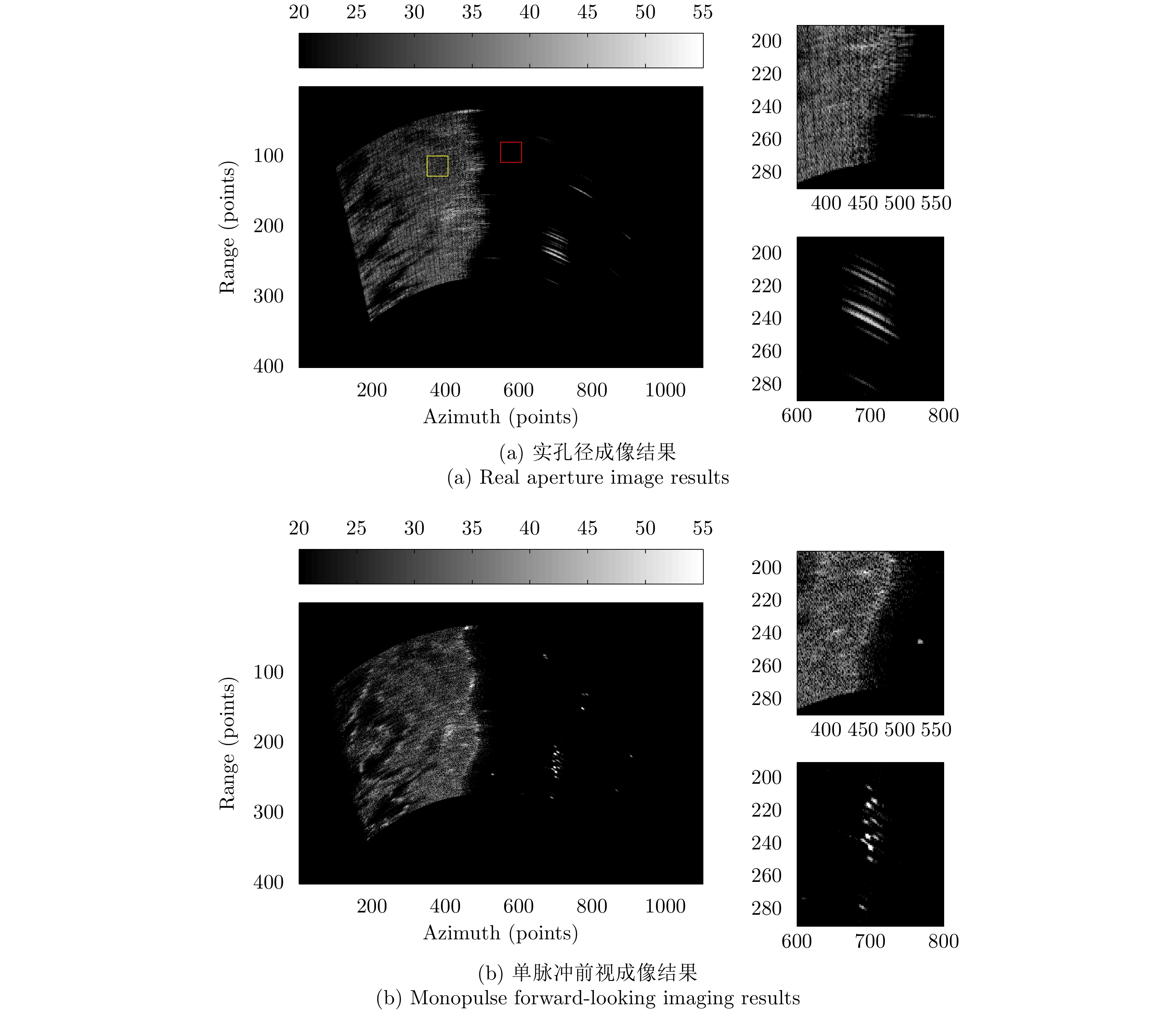
Monopulse technique is used in scanning radar systems to improve image quality in the forward-looking area. However, monopulse measurements fail to resolve multiple targets in the same resolution cell because of angular glint which often results to image blurring. In response to this, we propose a monopulse forward-looking imaging method utilizing Doppler estimates of sum-difference measurements. First, target multiplicity is resolved by exploiting the different Doppler shifts caused by the relative motion between the platform and the targets at different directions. High azimuthal angle measurement accuracy of the Doppler estimates is then obtained using the Sum-Difference Amplitude-Comparison (SDAC) monopulse technique. Subsequently, the intensity of the sum channel estimates is projected onto the image plane according to the range and angle measurements. To further improve the precision of angle measurements, a Chirp-Z Transform (CZT)-based algorithm is proposed for the reconstruction of the Doppler estimates of the sum-difference channels. Simulation results demonstrate the capability of the proposed methods in resolving multiple targets at high squint angles in a large scanning field. Real data experiments show significant improvement of image profiles using the CZT-based algorithm compared to that of the conventional monopulse imaging method.
Monopulse technique is used in scanning radar systems to improve image quality in the forward-looking area. However, monopulse measurements fail to resolve multiple targets in the same resolution cell because of angular glint which often results to image blurring. In response to this, we propose a monopulse forward-looking imaging method utilizing Doppler estimates of sum-difference measurements. First, target multiplicity is resolved by exploiting the different Doppler shifts caused by the relative motion between the platform and the targets at different directions. High azimuthal angle measurement accuracy of the Doppler estimates is then obtained using the Sum-Difference Amplitude-Comparison (SDAC) monopulse technique. Subsequently, the intensity of the sum channel estimates is projected onto the image plane according to the range and angle measurements. To further improve the precision of angle measurements, a Chirp-Z Transform (CZT)-based algorithm is proposed for the reconstruction of the Doppler estimates of the sum-difference channels. Simulation results demonstrate the capability of the proposed methods in resolving multiple targets at high squint angles in a large scanning field. Real data experiments show significant improvement of image profiles using the CZT-based algorithm compared to that of the conventional monopulse imaging method.








2021, 10(1): 143-158.
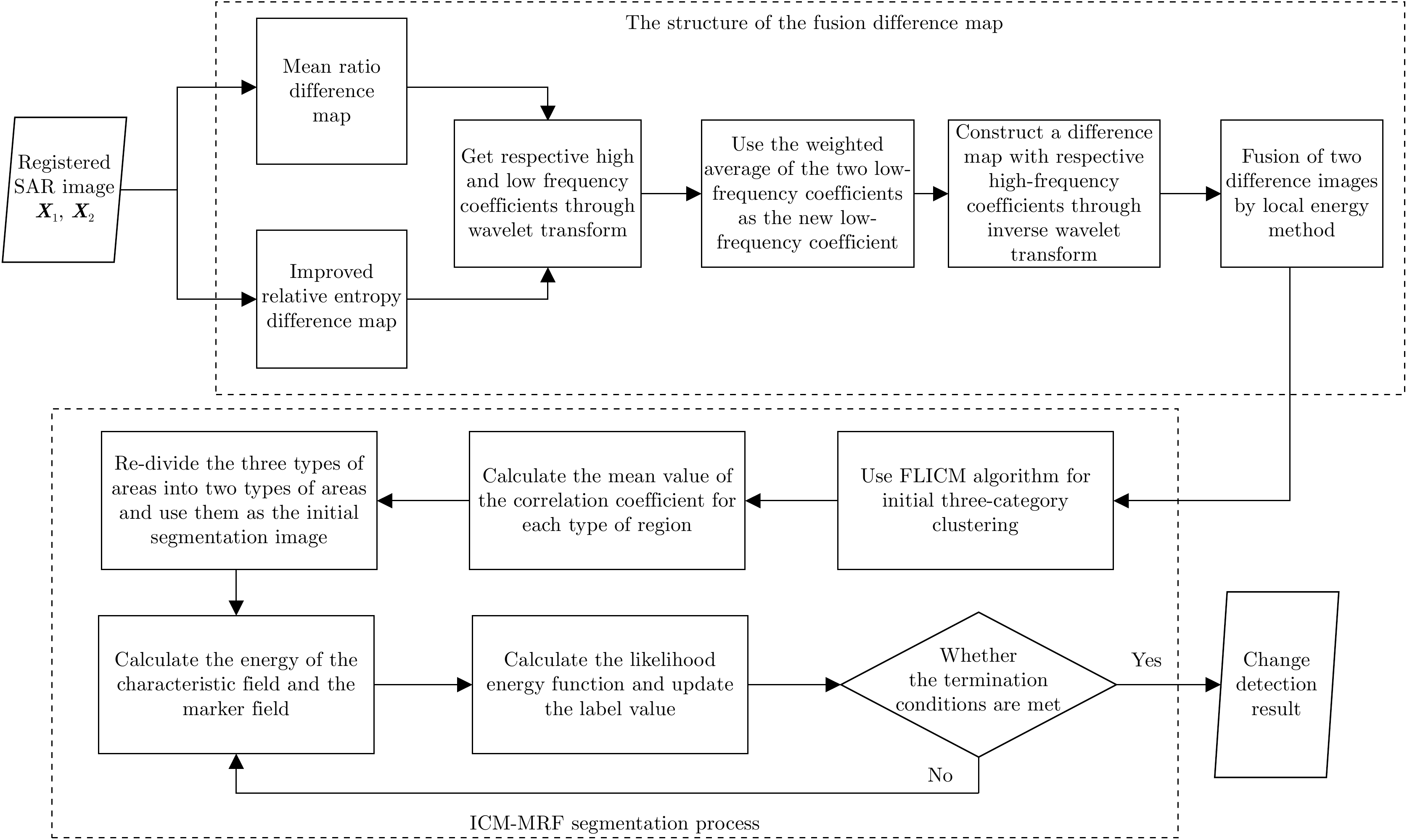
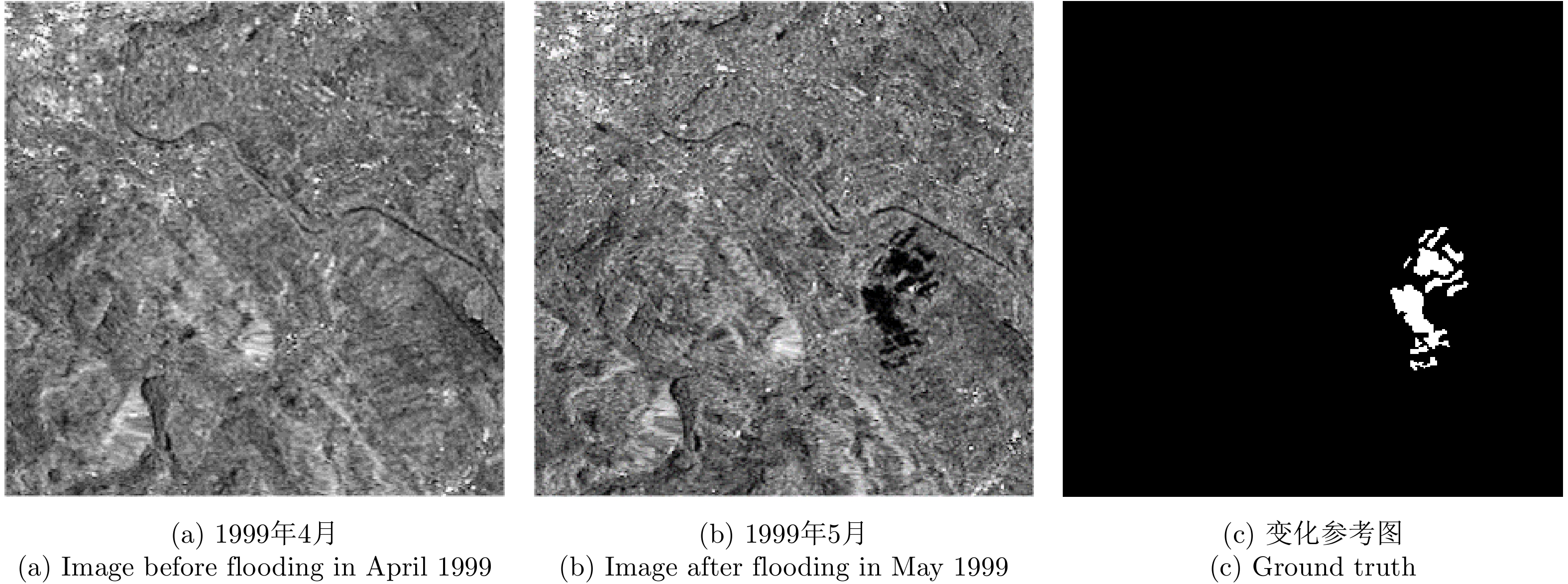
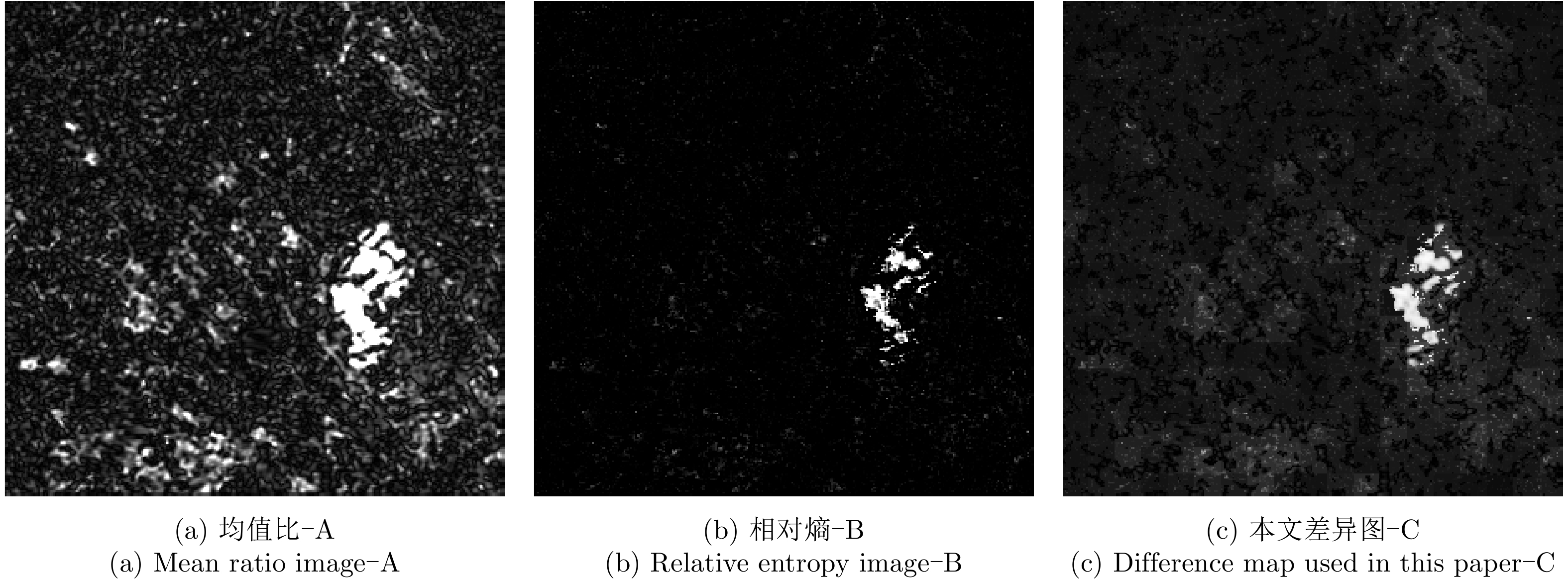
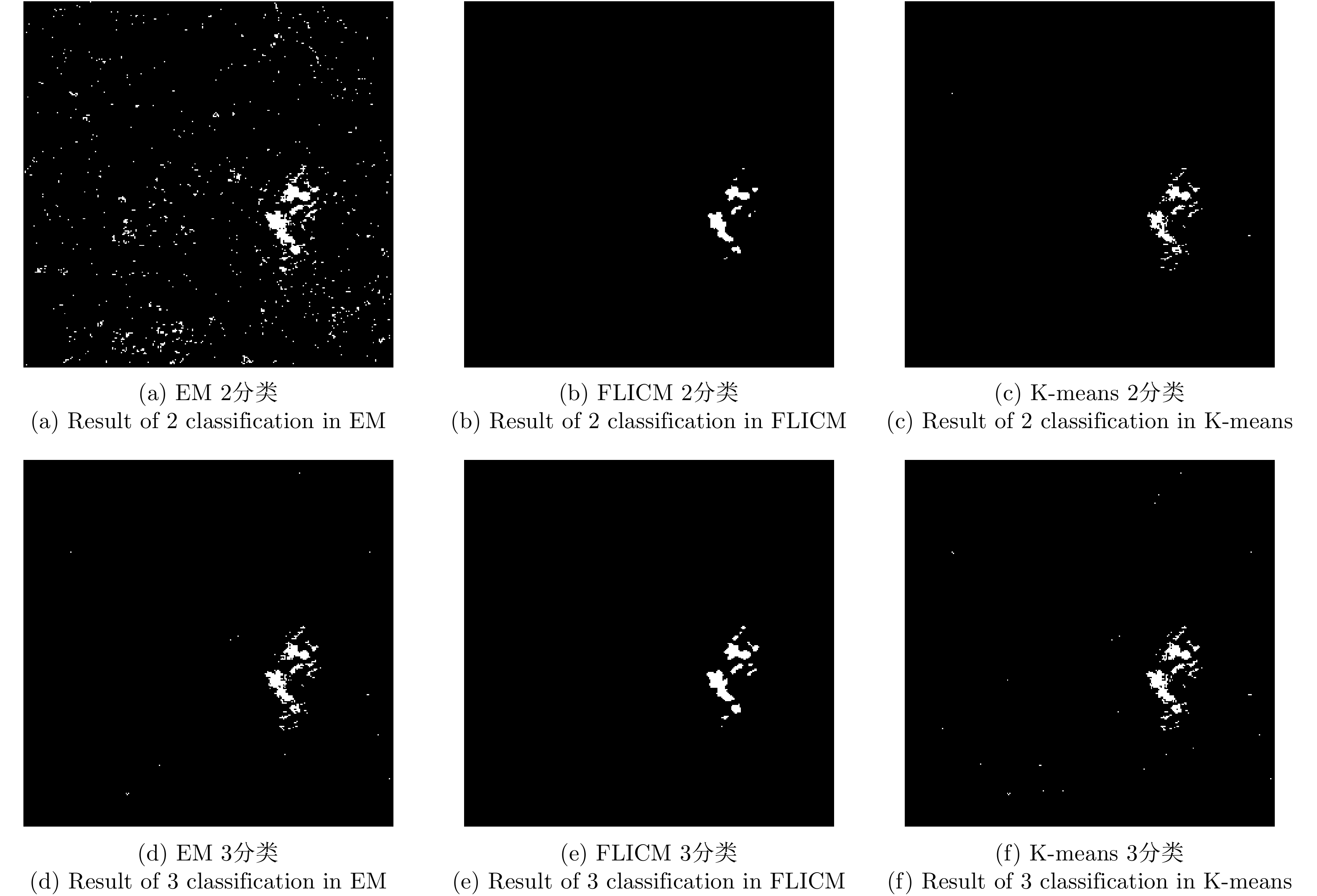
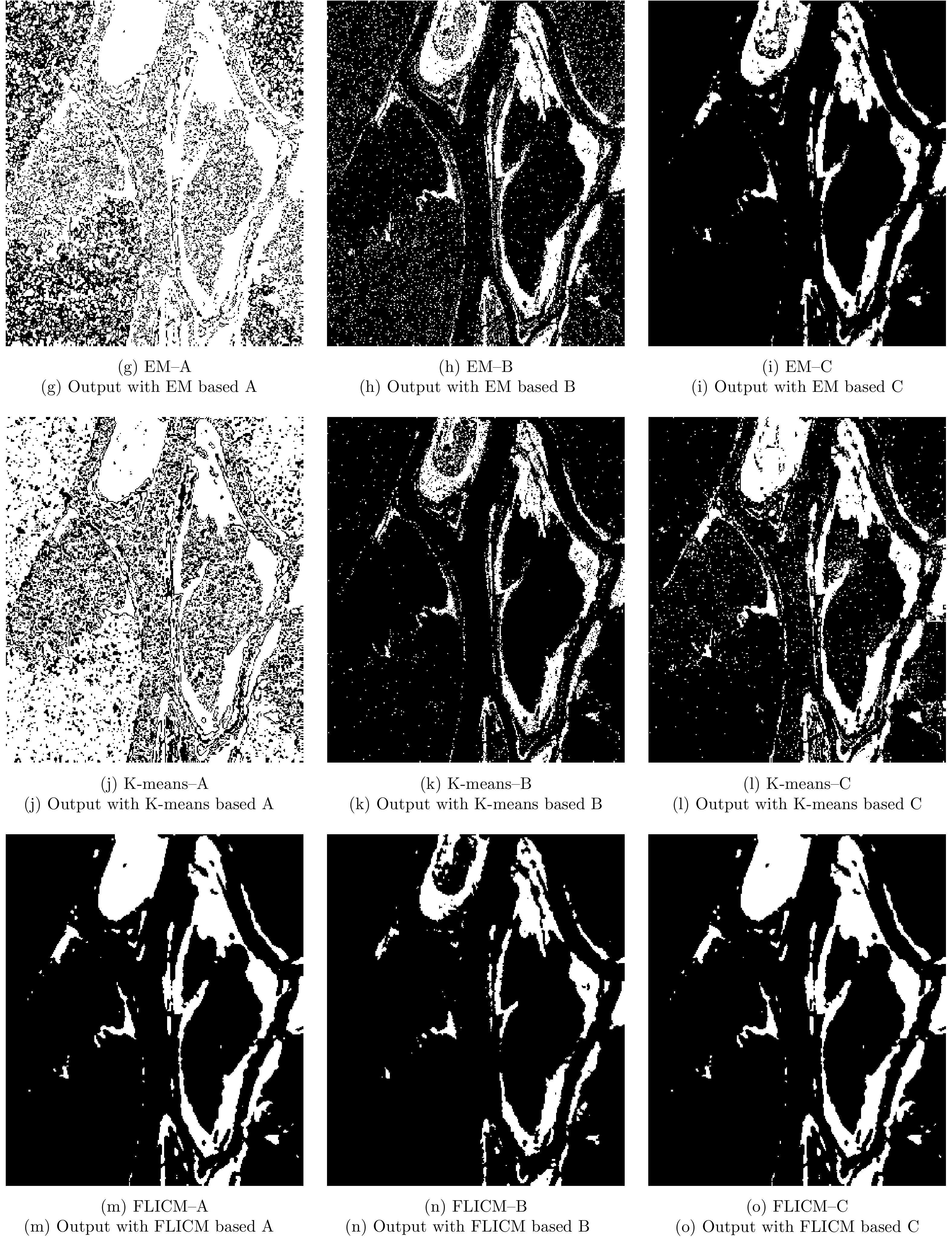
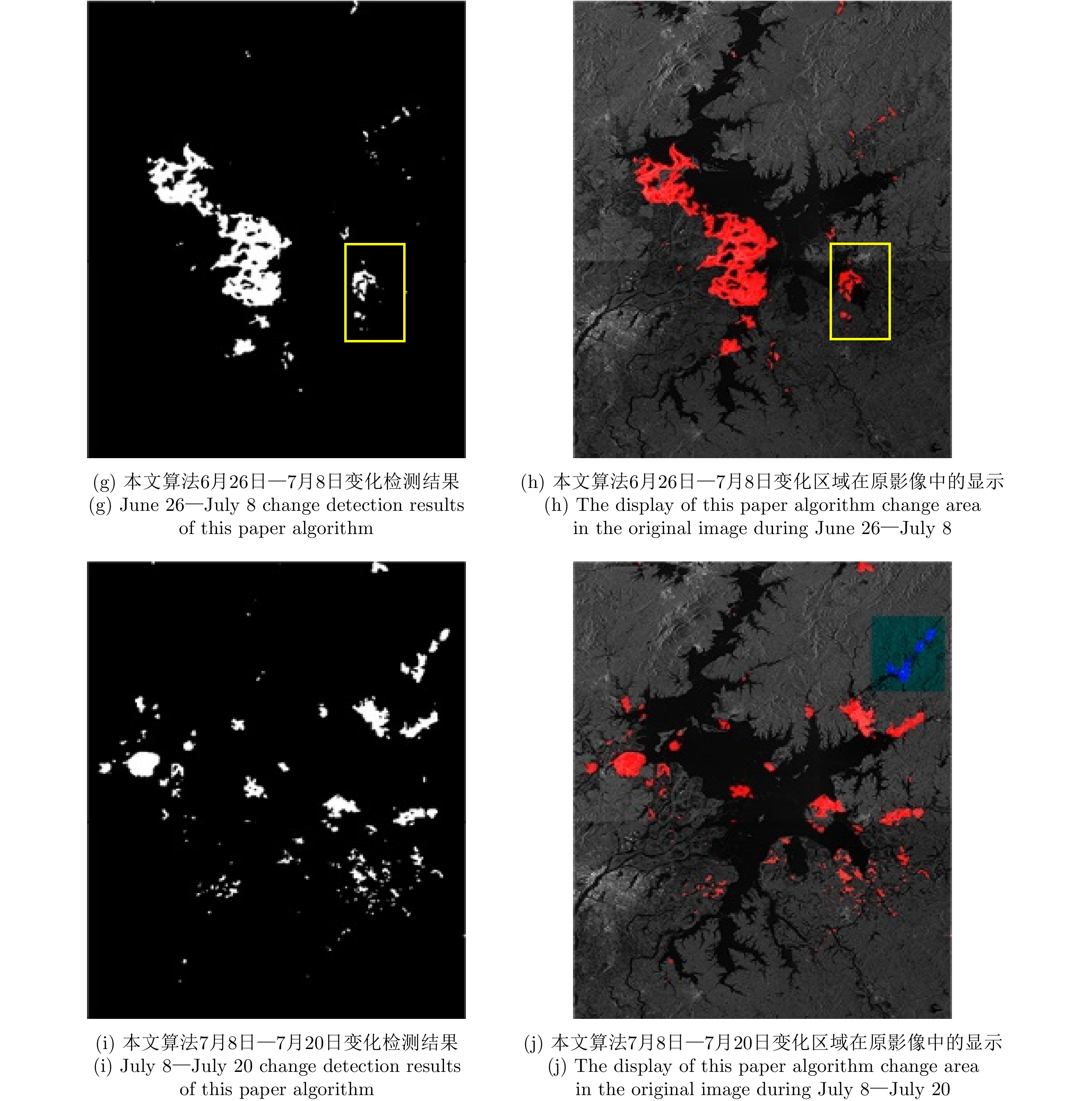
Due to the influence of the environment on the scattering characteristics of ground objects in flooded areas, the false error rate of the detection results increases when performing change detection on Synthetic Aperture Radar (SAR) images of these areas, which reduces the accuracy of the results obtained for the difference map. To solve this problem, in this paper, we propose a change-detection method based on a fusion difference map. This method combines the regional sensitivity of the entropy difference map with the regional retention of the mean difference map to construct a fusion difference map based on an improved relative entropy and mean value ratio. First, the initial clustering results of the fuzzy local information C-means clustering method are classified by their Pearson correlation coefficients, and second, the secondary classification results are used for the initial image segmentation. Third, the final segmentation results are obtained using the iterative condition model and Markov random field. To verify the flood-disaster-detection performance of the proposed method, we used the second of Europe Remote-Sensing (ERS-2) Satellite data obtained for the Bern area in Switzerland in April and May 1999 and Radarsat remote-sensing data for the Ottawa region in Canada in May and August 1997. We also applied the proposed method to data obtained for the Poyang Lake region of China in June and July 2020, and estimated the disaster area and change trend before and after the flood in Poyang Lake. The experimental results show that the algorithm had a low overall detection error, the false error rate of the detection results were somewhat reduced, and the accuracy of the detection results was improved.
Due to the influence of the environment on the scattering characteristics of ground objects in flooded areas, the false error rate of the detection results increases when performing change detection on Synthetic Aperture Radar (SAR) images of these areas, which reduces the accuracy of the results obtained for the difference map. To solve this problem, in this paper, we propose a change-detection method based on a fusion difference map. This method combines the regional sensitivity of the entropy difference map with the regional retention of the mean difference map to construct a fusion difference map based on an improved relative entropy and mean value ratio. First, the initial clustering results of the fuzzy local information C-means clustering method are classified by their Pearson correlation coefficients, and second, the secondary classification results are used for the initial image segmentation. Third, the final segmentation results are obtained using the iterative condition model and Markov random field. To verify the flood-disaster-detection performance of the proposed method, we used the second of Europe Remote-Sensing (ERS-2) Satellite data obtained for the Bern area in Switzerland in April and May 1999 and Radarsat remote-sensing data for the Ottawa region in Canada in May and August 1997. We also applied the proposed method to data obtained for the Poyang Lake region of China in June and July 2020, and estimated the disaster area and change trend before and after the flood in Poyang Lake. The experimental results show that the algorithm had a low overall detection error, the false error rate of the detection results were somewhat reduced, and the accuracy of the detection results was improved.







2021, 10(1): 159-172.
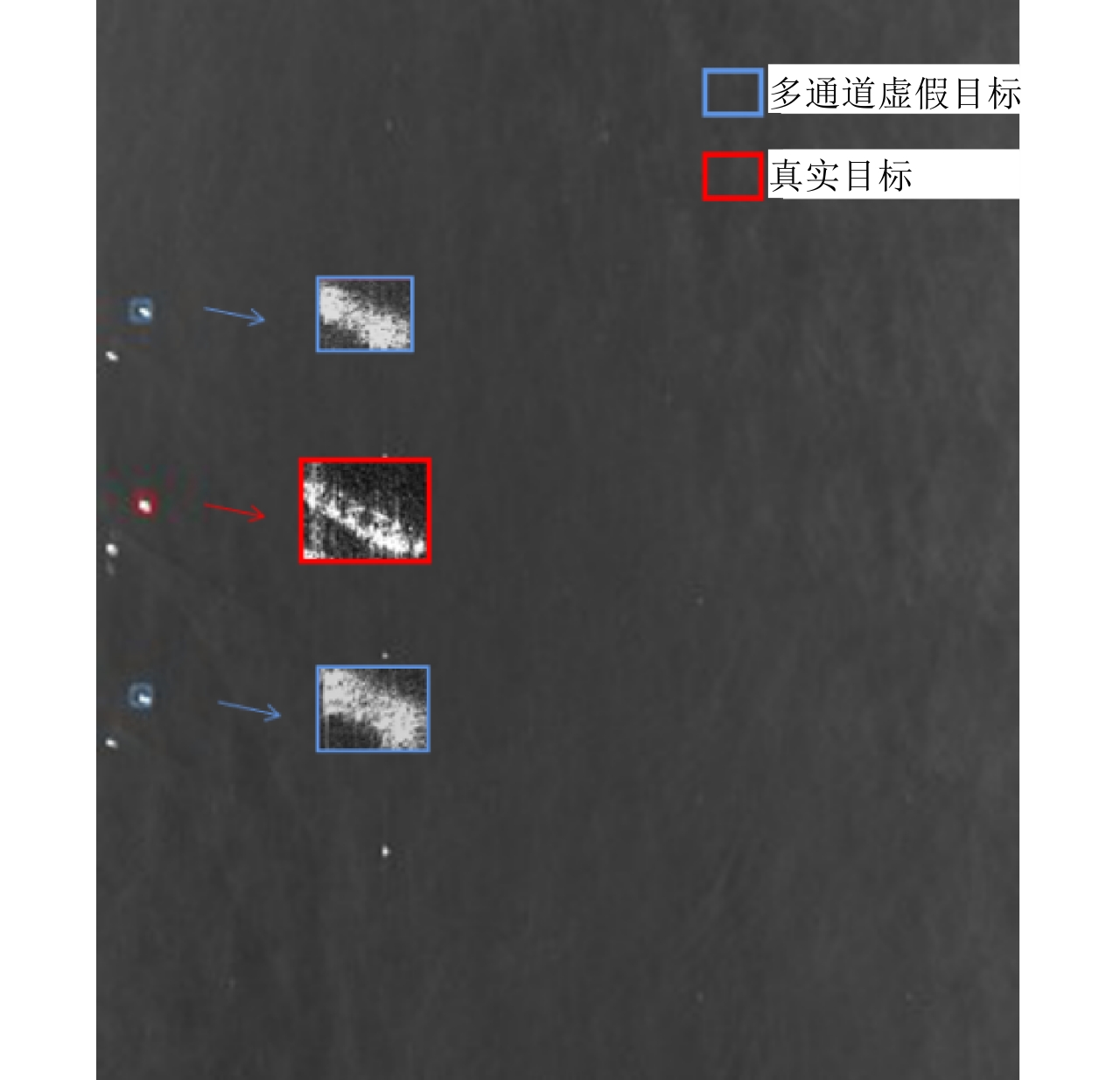
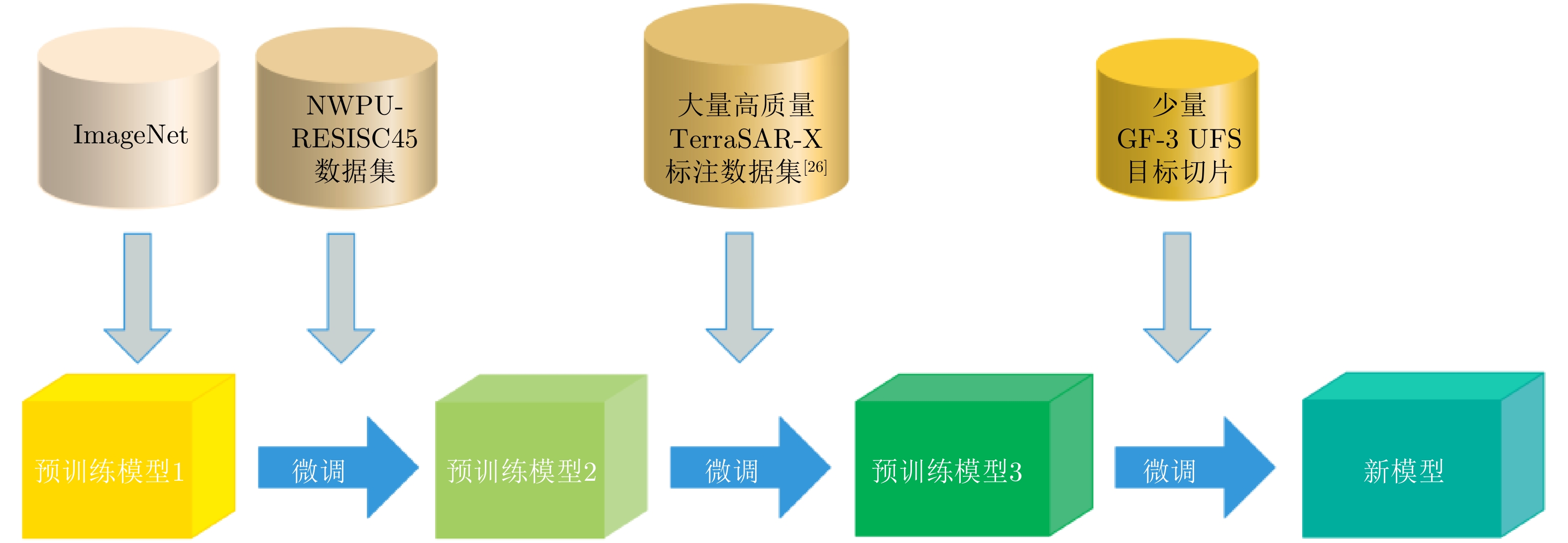
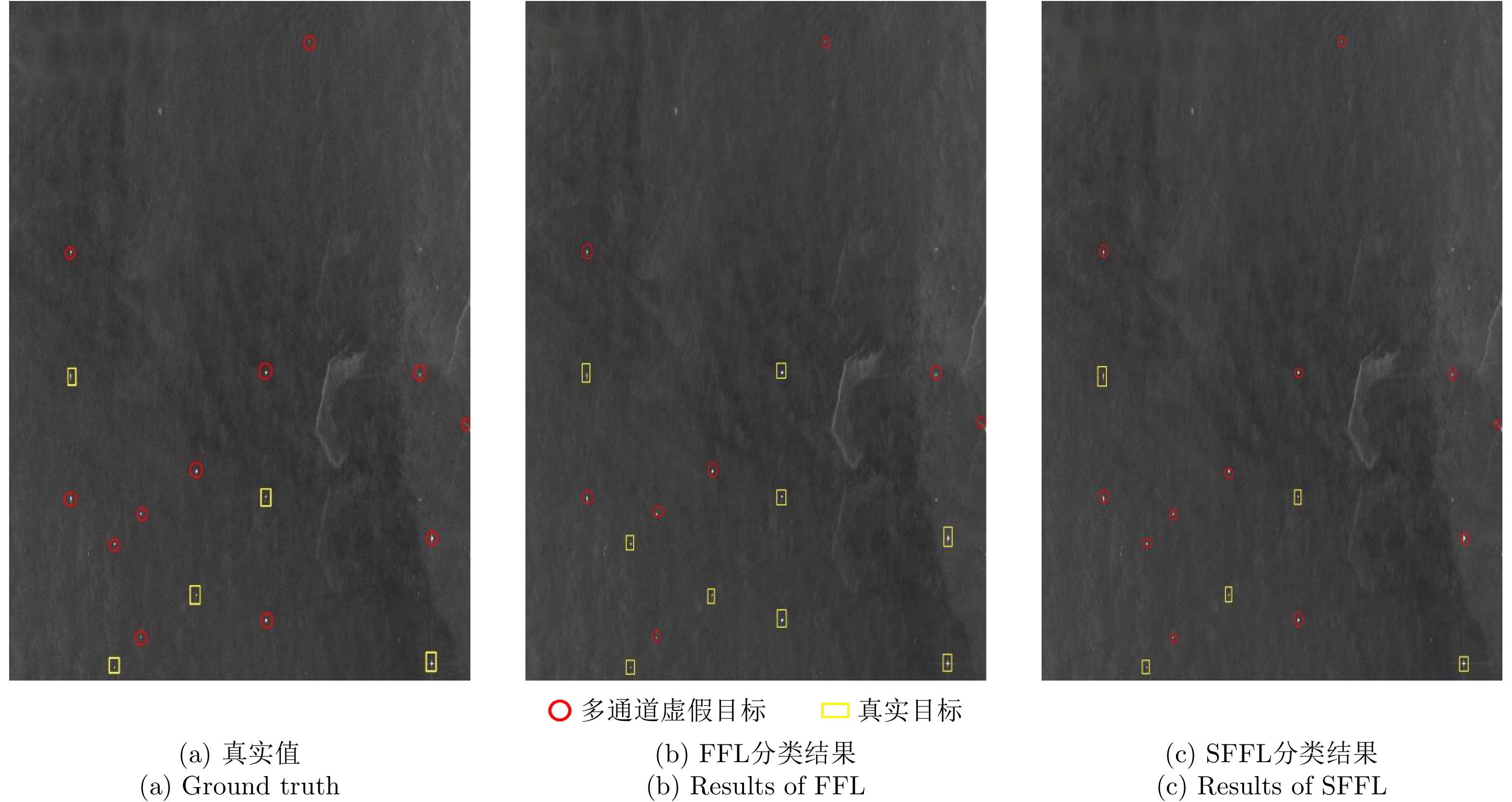
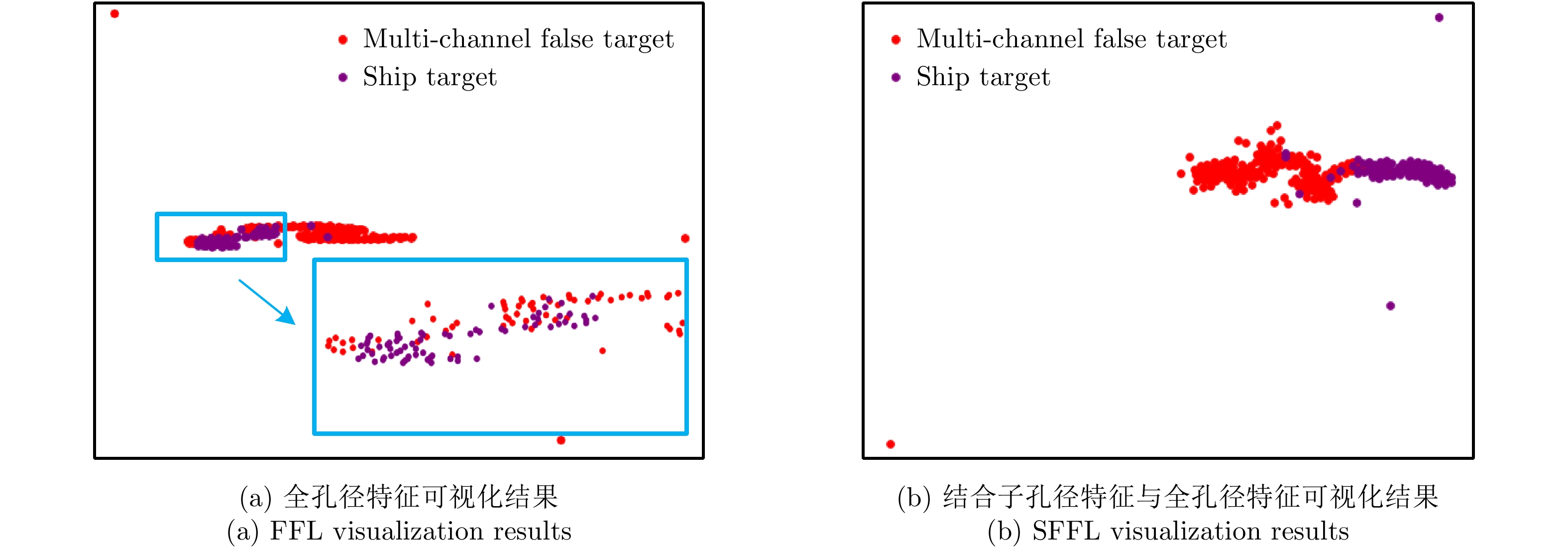
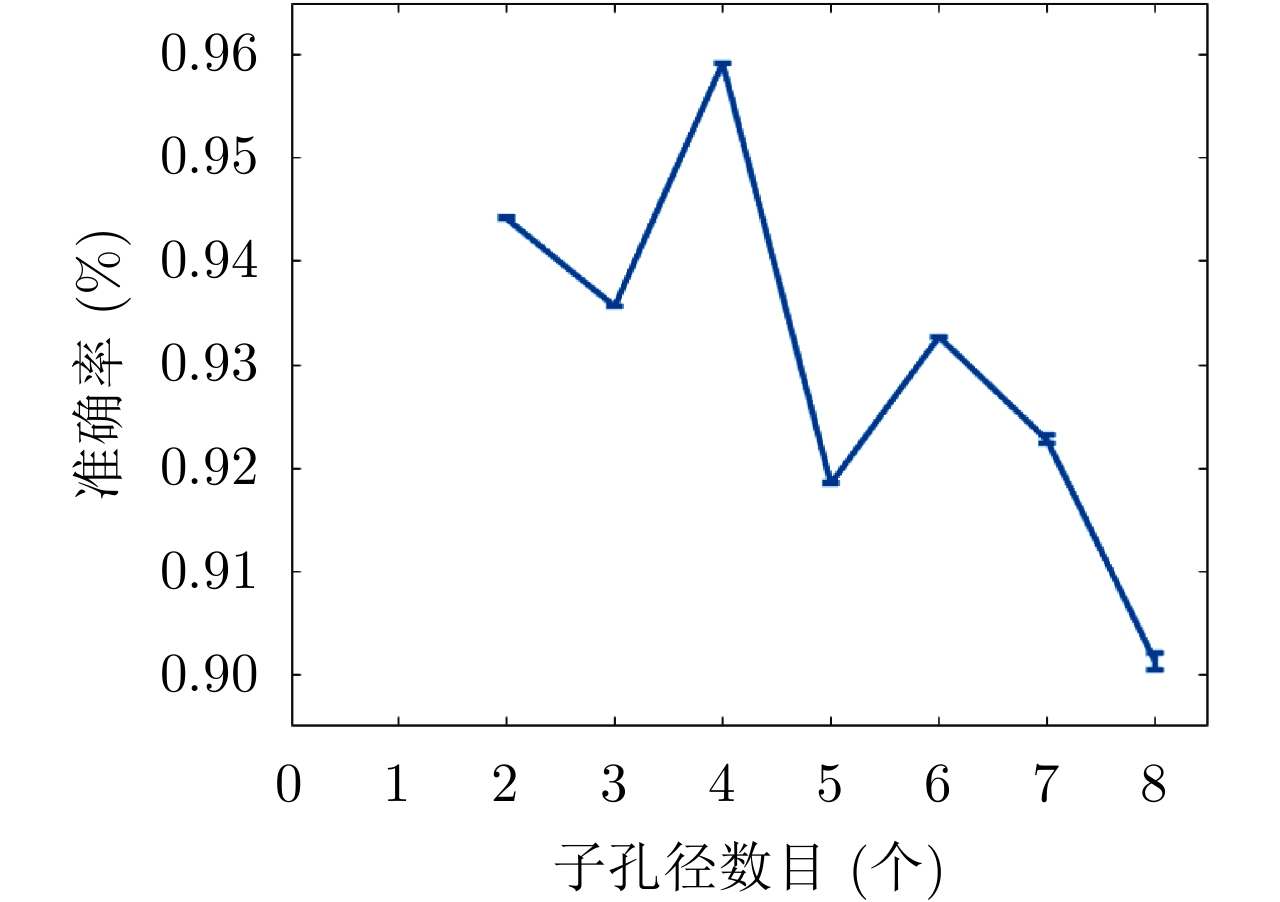
False targets caused by multichannel Synthetic Aperture Radar (SAR) are similar to a defocused ship in both shape and texture, making it difficult to discriminate in the full-aperture SAR image. To address the issue of false alarms caused by such false targets, this paper proposes a multichannel SAR false-target discrimination method based on sub-aperture and full-aperture feature learning. First, amplitude calculation is performed on complex SAR images to obtain the amplitude images, and transfer learning is utilized to extract the full-aperture features from the amplitude images. Then, sub-aperture decomposition is performed on complex SAR images to obtain a series of sub-aperture images, and the Stacked Convolutional Auto-Encoders (SCAE) are applied to extract the sub-aperture features from the sub-aperture images. Finally, the sub-aperture and the full-aperture features are concatenated to form the joint features, which are used to accomplish target discrimination. The accuracy of the method proposed in this paper is 16.32% higher than that of the approach only using the full-aperture feature on GF-3 UFS SAR images.
False targets caused by multichannel Synthetic Aperture Radar (SAR) are similar to a defocused ship in both shape and texture, making it difficult to discriminate in the full-aperture SAR image. To address the issue of false alarms caused by such false targets, this paper proposes a multichannel SAR false-target discrimination method based on sub-aperture and full-aperture feature learning. First, amplitude calculation is performed on complex SAR images to obtain the amplitude images, and transfer learning is utilized to extract the full-aperture features from the amplitude images. Then, sub-aperture decomposition is performed on complex SAR images to obtain a series of sub-aperture images, and the Stacked Convolutional Auto-Encoders (SCAE) are applied to extract the sub-aperture features from the sub-aperture images. Finally, the sub-aperture and the full-aperture features are concatenated to form the joint features, which are used to accomplish target discrimination. The accuracy of the method proposed in this paper is 16.32% higher than that of the approach only using the full-aperture feature on GF-3 UFS SAR images.









2021, 10(1): 173-182.
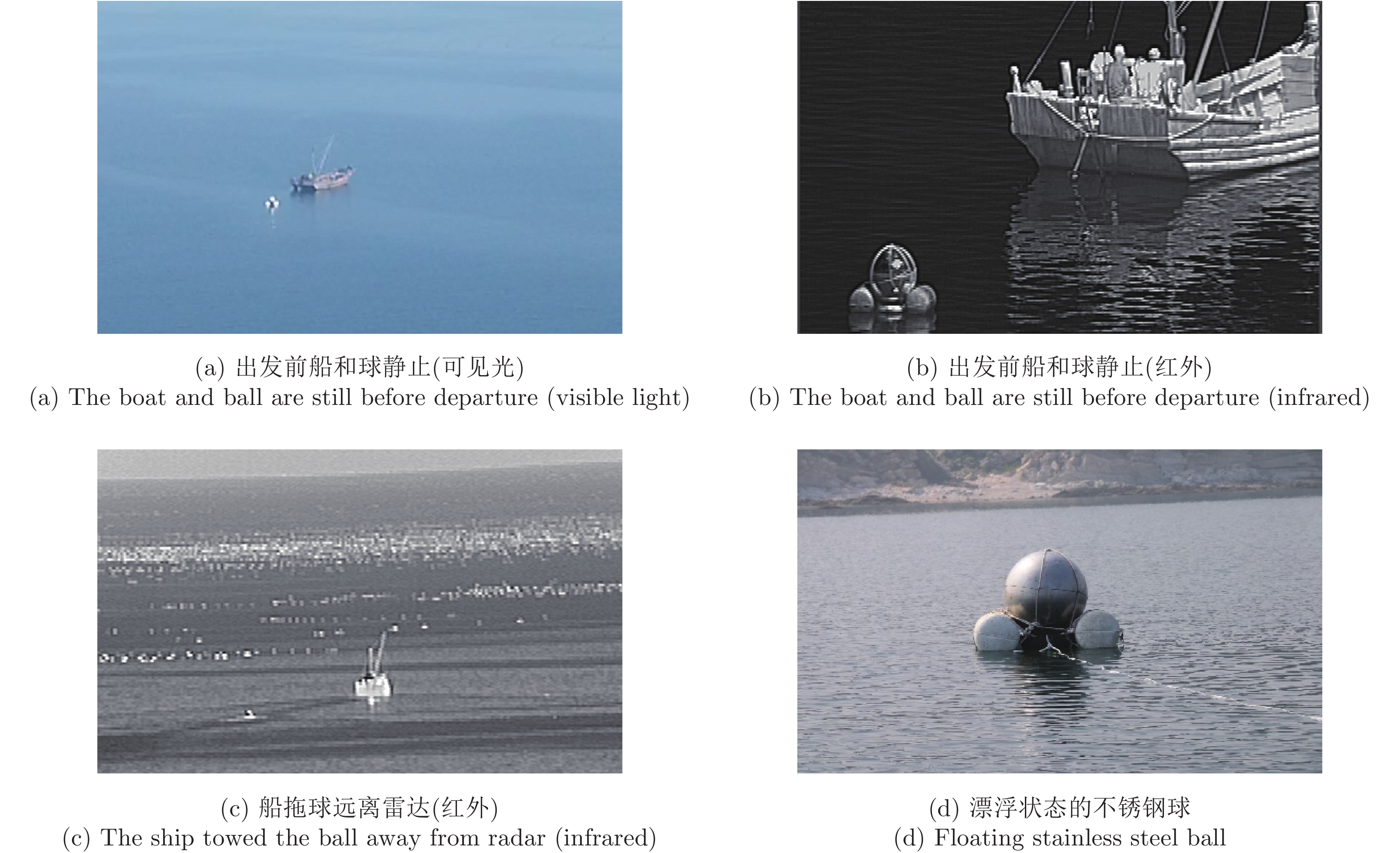
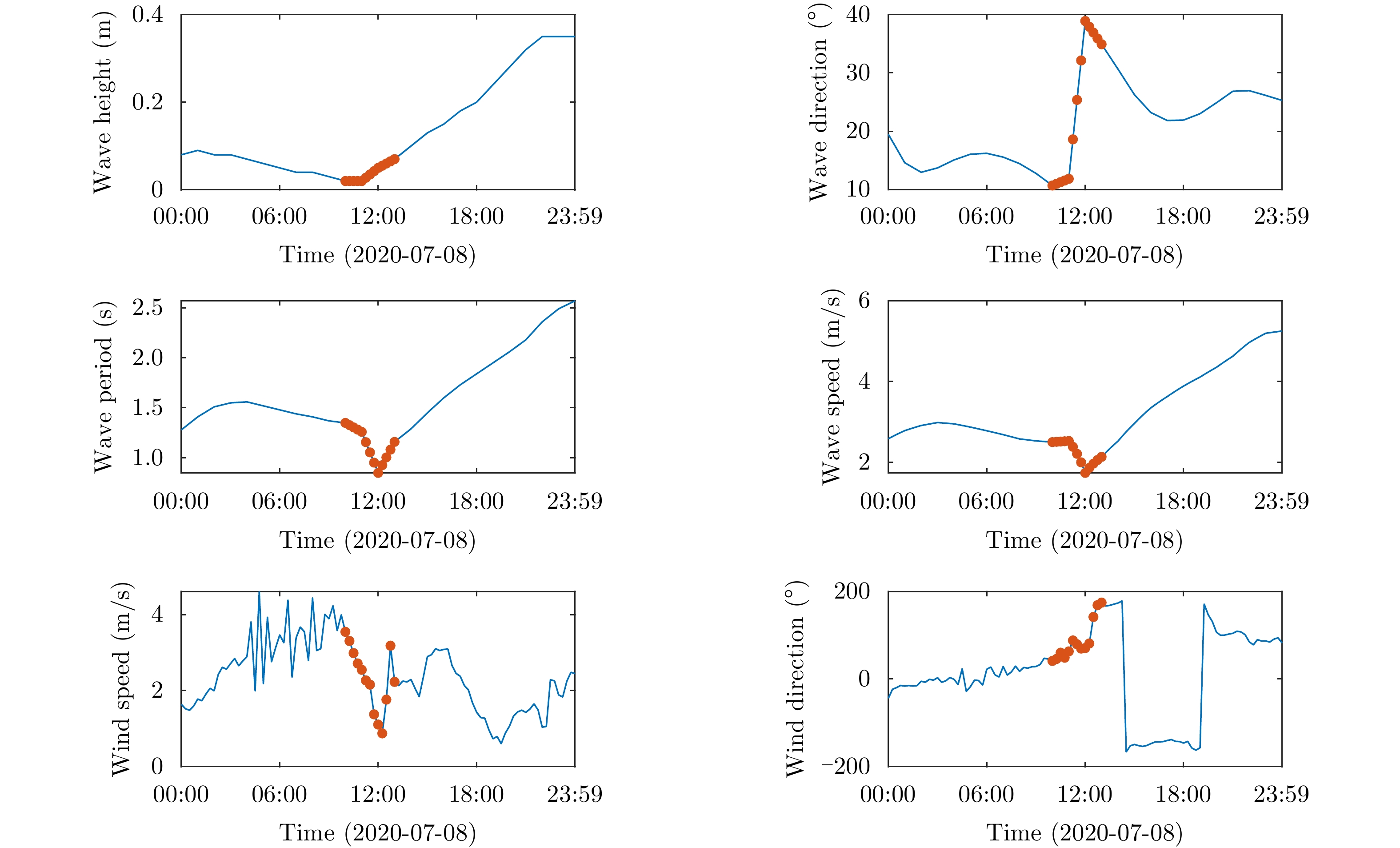
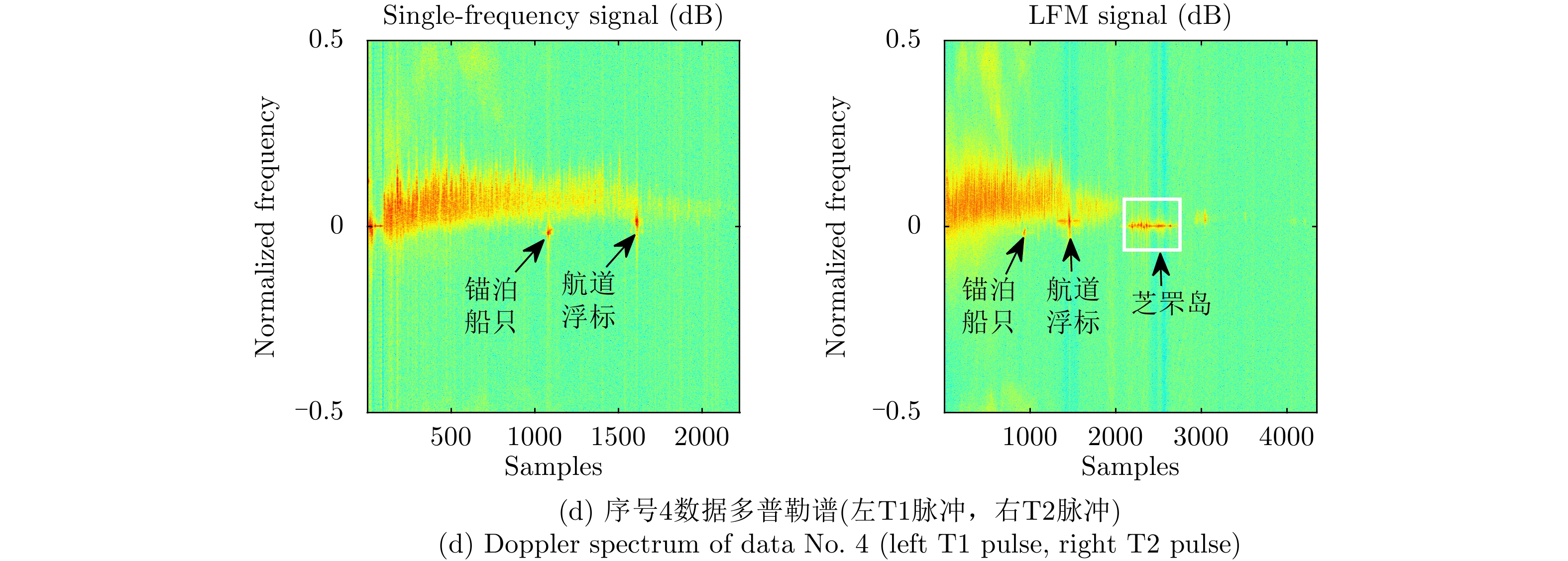
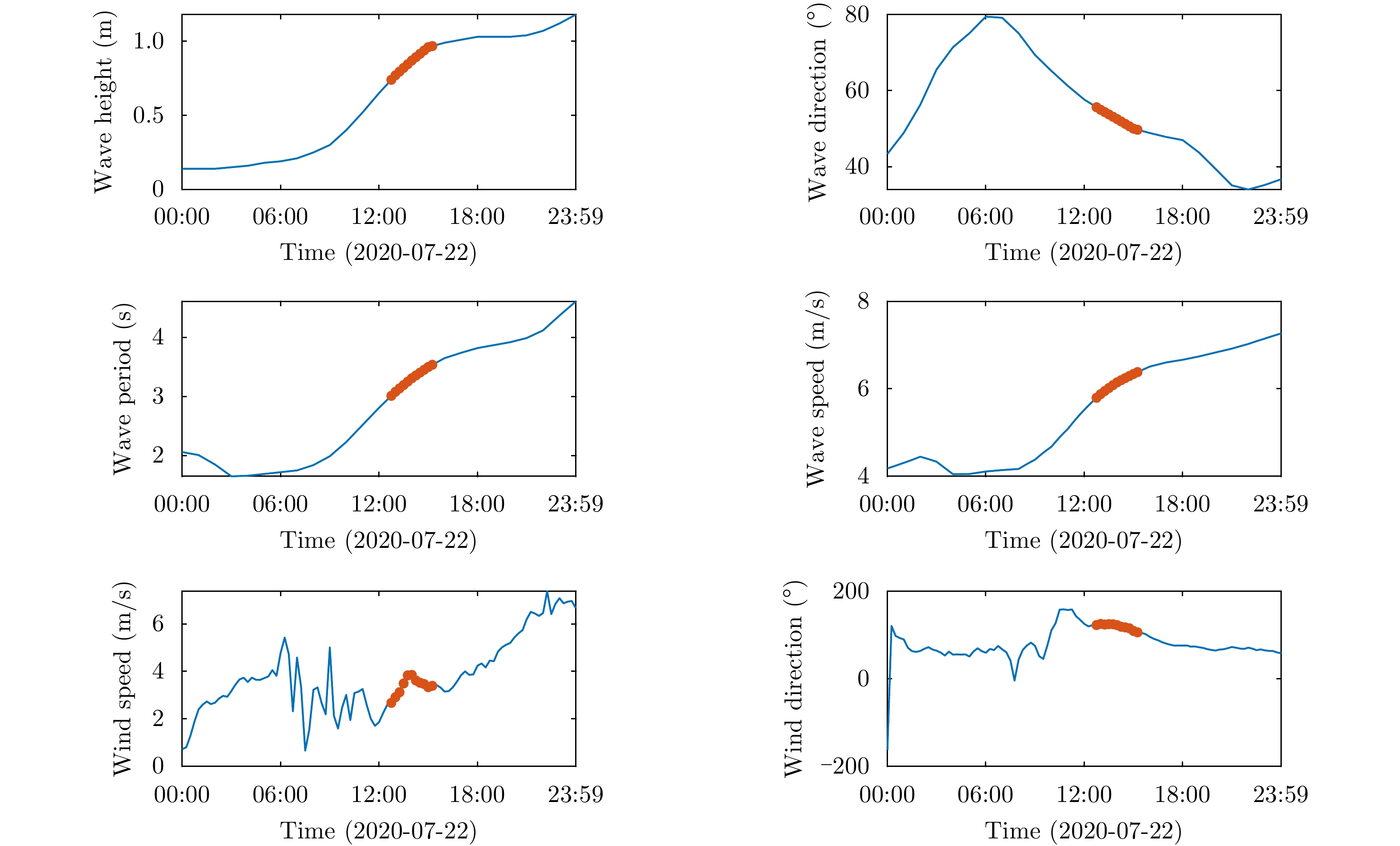
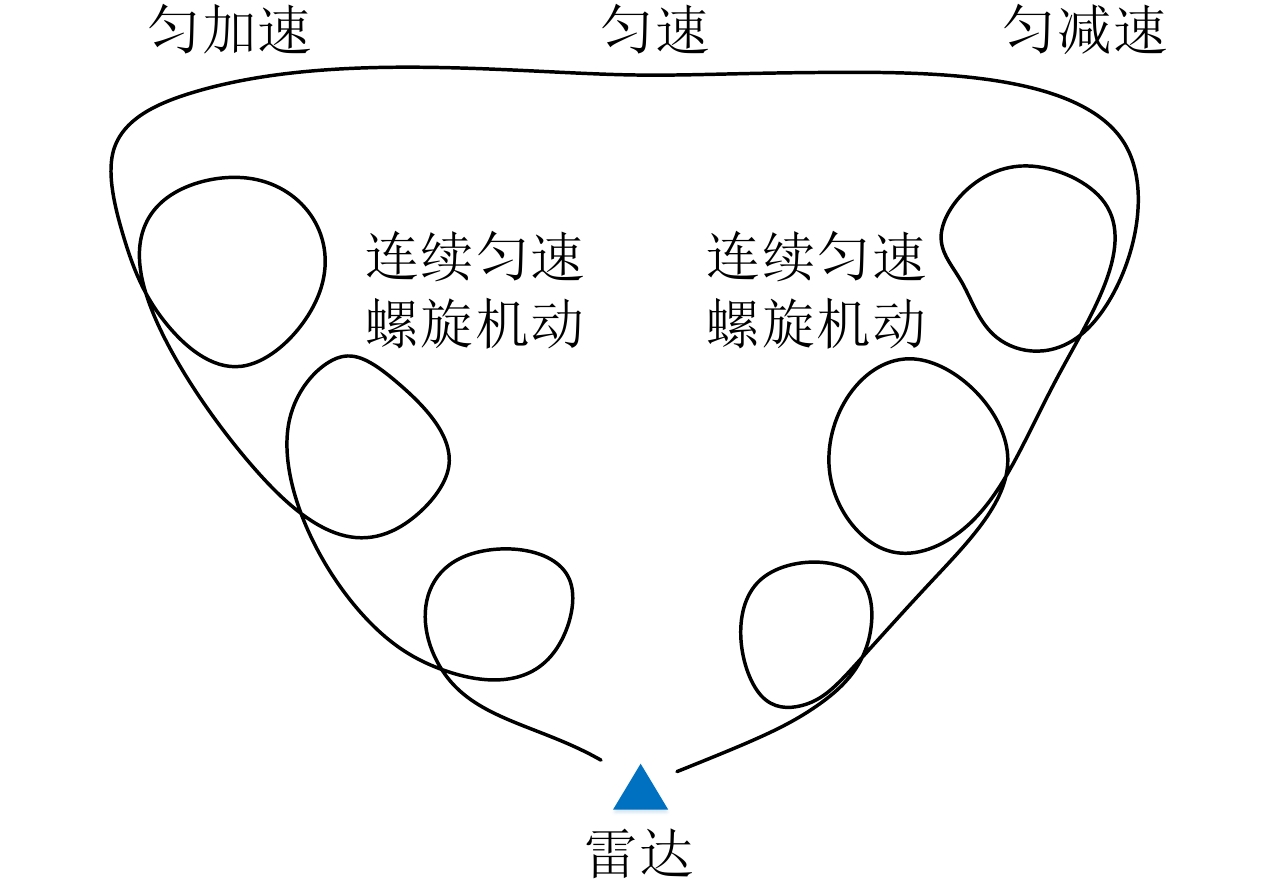
There is an urgent need for radar-measured data to tackle key technologies of radar maritime target detection. The ‘‘Sea-detecting X-band Radar and Data Acquisition Program’’, proposed in 2019, aims to obtain data through radar experiments and share them publicly. In 2020, the program continued to advance and conducted several experiments in three aspects, namely, Radar Cross-Section (RCS) calibration of radar targets, detection of sea clutter and target under different sea conditions, as well as detection and tracking of maneuvering targets in sea. The measurement data of the stainless steel sphere calibrator at different distances in radar slow-scanning mode, sea clutter in radar staring mode in different directions, sea target in radar staring mode, and marine engine speedboat in radar scanning mode are obtained. In addition, wind and wave data, data from the Automatic Identification System (AIS) of targets, visible/infrared data, and other associated sensor data are synchronously obtained.
There is an urgent need for radar-measured data to tackle key technologies of radar maritime target detection. The ‘‘Sea-detecting X-band Radar and Data Acquisition Program’’, proposed in 2019, aims to obtain data through radar experiments and share them publicly. In 2020, the program continued to advance and conducted several experiments in three aspects, namely, Radar Cross-Section (RCS) calibration of radar targets, detection of sea clutter and target under different sea conditions, as well as detection and tracking of maneuvering targets in sea. The measurement data of the stainless steel sphere calibrator at different distances in radar slow-scanning mode, sea clutter in radar staring mode in different directions, sea target in radar staring mode, and marine engine speedboat in radar scanning mode are obtained. In addition, wind and wave data, data from the Automatic Identification System (AIS) of targets, visible/infrared data, and other associated sensor data are synchronously obtained.









 微信 | 公众平台
微信 | 公众平台 

