
 Submit Manuscript
Submit Manuscript Peer Review
Peer Review Editor Work
Editor Work- Home
- Articles & Issues
-
Data
- Dataset of Radar Detecting Sea
- SAR Dataset
- SARGroundObjectsTypes
- SARMV3D
- AIRSAT Constellation SAR Land Cover Classification Dataset
- 3DRIED
- UWB-HA4D
- LLS-LFMCWR
- FAIR-CSAR
- MSAR
- SDD-SAR
- FUSAR
- SpaceborneSAR3Dimaging
- Sea-land Segmentation
- SAR Multi-domain Ship Detection Dataset
- SAR-Airport
- Hilly and mountainous farmland time-series SAR and ground quadrat dataset
- SAR images for interference detection and suppression
- HP-SAR Evaluation & Analytical Dataset
- GDHuiYan-ATRNet
- Multi-System Maritime Low Observable Target Dataset
- DatasetinthePaper
- DatasetintheCompetition
- Report
- Course
- About
- Publish
- Editorial Board
- Chinese
| Citation: | QUAN Sinong, FAN Hui, DAI Dahai, et al. Recognition of ships and chaff clouds based on sophisticated polarimetric target decomposition[J]. Journal of Radars, 2021, 10(1): 61–73. doi: 10.12000/JR20123

|
Recognition of Ships and Chaff Clouds Based on Sophisticated Polarimetric Target Decomposition
DOI: 10.12000/JR20123 CSTR: 32380.14.JR20123
More Information-
Abstract
The recognition of ships from chaff cloud jamming is challenging because they have similar dimensions and radar cross sections. In this paper, we propose a polarimetric recognition technique with sophisticated polarimetric target decomposition. Three sophisticated scattering models are integrated to constitute a seven-component model-based decomposition method so as to accurately characterize the dominant and local scattering of ships. Based on the concepts of contrast and suppression, a robust scattering contribution difference feature is designed according to the derived scattering contributions. The constructed feature vector, combined with the polarization scattering angle, is inputted into the support vector machine to fulfill the recognition process. Simulated and real polarimetric radar data are utilized to test the proposed method, and the results show that the proposed method outperforms state-of-the-art methods by achieving the highest recognition rate of over 98%. -

-
References
[1] 陈静. 雷达箔条干扰原理[M]. 北京: 国防工业出版社, 2007.CHEN Jing. Principles of Radar Chaff Jamming[M]. Beijing: National Defense Industry Press, 2007.[2] MARCUS S W. Dynamics and radar cross section density of chaff clouds[J]. IEEE Transactions on Aerospace and Electronic Systems, 2004, 40(1): 93–102. doi: 10.1109/TAES.2004.1292145[3] BENDAYAN M and GARCIA A. Signal modeling of chaff in naval environment simulation[J]. IEEE Transactions on Aerospace and Electronic Systems, 2015, 51(4): 3161–3166. doi: 10.1109/TAES.2015.140922[4] SEO D W, LEE J H, LEE H S, et al. Estimation of incoherent scattered field by multiple scatterers in random media[J]. ETRI Journal, 2016, 38(1): 141–148. doi: 10.4218/etrij.16.0114.1237[5] 张杰, 张晰, 范陈清, 等. 极化SAR在海洋探测中的应用与探讨[J]. 雷达学报, 2016, 5(6): 596–606. doi: 10.12000/JR16124ZHANG Jie, ZHANG Xi, FAN Chenqing, et al. Discussion on application of polarimetric synthetic aperture radar in marine surveillance[J]. Journal of Radars, 2016, 5(6): 596–606. doi: 10.12000/JR16124[6] 代大海, 廖斌, 肖顺平, 等. 雷达极化信息获取与处理的研究进展[J]. 雷达学报, 2016, 5(2): 143–155. doi: 10.12000/JR15103DAI Dahai, LIAO Bin, XIAO Shunping, et al. Advancements on radar polarization information acquisition and processing[J]. Journal of Radars, 2016, 5(2): 143–155. doi: 10.12000/JR15103[7] 赵春雷, 王亚梁, 阳云龙, 等. 雷达极化信息获取及极化信号处理技术研究综述[J]. 雷达学报, 2016, 5(6): 620–638. doi: 10.12000/JR16092ZHAO Chunlei, WANG Yaliang, YANG Yunlong, et al. Review of radar polarization information acquisition and polarimetric signal processing techniques[J]. Journal of Radars, 2016, 5(6): 620–638. doi: 10.12000/JR16092[8] 杨建宇. 雷达对地成像技术多向演化趋势与规律分析[J]. 雷达学报, 2019, 8(6): 669–693. doi: 10.12000/JR19099YANG Jianyu. Multi-directional evolution trend and law analysis of radar ground imaging technology[J]. Journal of Radars, 2019, 8(6): 669–693. doi: 10.12000/JR19099[9] 王雪松, 陈思伟. 合成孔径雷达极化成像解译识别技术的进展与展望[J]. 雷达学报, 2020, 9(2): 259–276. doi: 10.12000/JR19109WANG Xuesong and CHEN Siwei. Polarimetric synthetic aperture radar interpretation and recognition: Advances and perspectives[J]. Journal of Radars, 2020, 9(2): 259–276. doi: 10.12000/JR19109[10] 李永祯, 李棉全, 程旭, 等. 雷达极化测量体制研究综述[J]. 系统工程与电子技术, 2013, 35(9): 1873–1877. doi: 10.3969/j.issn.1001-506X.2013.09.12LI Yongzhen, LI Mianquan, CHENG Xu, et al. Summarization of radar polarization measurement modes[J]. Systems Engineering and Electronics, 2013, 35(9): 1873–1877. doi: 10.3969/j.issn.1001-506X.2013.09.12[11] 陈世超, 高鹤婷, 罗丰. 基于极化联合特征的海面目标检测方法[J]. 雷达学报, 2020, 9(4): 664–673. doi: 10.12000/JR20072CHEN Shichao, GAO Heting, and LUO Feng. Target detection in sea clutter based on combined characteristics of polarization[J]. Journal of Radars, 2020, 9(4): 664–673. doi: 10.12000/JR20072[12] SHAO Xianhe, XUE Jinghong, and DU Hai. Theoretical analysis of polarization recognition between chaff cloud and ship[C]. 2007 International Workshop on Anti-Counterfeiting, Security and Identification, Xiamen, China, 2007: 125–129. doi: 10.1109/IWASID.2007.373711.[13] SHAO Xianhe, DU Hai, and XUE Jinghong. A target recognition method based on non-Linear polarization transformation[C]. 2007 International Workshop on Anti-Counterfeiting, Security and Identification, Xiamen, China, 2007: 157–163. doi: 10.1109/IWASID.2007.373718.[14] LI Xi, LIN Lianshan, and SHAO Xianhe. A target polarization recognition method for radar echoes[C]. 2010 International Conference on Microwave and Millimeter Wave Technology, Chengdu, China, 2010: 1644–1647. doi: 10.1109/ICMMT.2010.5524748.[15] 李金梁, 曾勇虎, 申绪涧, 等. 改进的箔条干扰极化识别方法[J]. 雷达科学与技术, 2015, 13(4): 350–355. doi: 10.3969/j.issn.1672-2337.2015.04.004LI Jinliang, ZENG Yonghu, SHEN Xujian, et al. Modified polarization recognition method for chaff jamming[J]. Radar Science and Technology, 2015, 13(4): 350–355. doi: 10.3969/j.issn.1672-2337.2015.04.004[16] TANG B, LI H M, and SHENG X Q. Jamming recognition method based on the full polarisation scattering matrix of chaff clouds[J]. IET Microwaves, Antennas & Propagation, 2012, 6(13): 1451–1460. doi: 10.1049/iet-map.2012.0297[17] YANG Yong, XIAO Shunping, FENG Dejun, et al. Polarisation oblique projection for radar seeker tracking in chaff centroid jamming environment without prior knowledge[J]. IET Radar, Sonar & Navigation, 2014, 8(9): 1195–1202. doi: 10.1049/iet-rsn.2013.0388[18] CUI Gang, SHI Longfei, MA Jiazhi, et al. Identification of chaff interference based on polarization parameter measurement[C]. The 2017 13th IEEE International Conference on Electronic Measurement & Instruments, Yangzhou, China, 2017: 392–396. doi: 10.1109/ICEMI.2017.8265829.[19] HU Shengliang, WU Lingang, ZHANG Jun, et al. Research on chaff jamming recognition technology of anti-ship missile based on radar target characteristics[C]. The 2019 12th International Conference on Intelligent Computation Technology and Automation, Xiangtan, China, 2019: 222–226. doi: 10.1109/ICICTA49267.2019.00054.[20] CRISTIANINI N and SHAWE-TAYLOR J. An Introduction to Support Vector Machines and Other Kernel-based Learning Methods[M]. Cambridge: Cambridge University Press, 2000: 198–216.[21] FREEMAN A and DURDEN S L. A three-component scattering model for polarimetric SAR data[J]. IEEE Transactions on Geoscience and Remote Sensing, 1998, 36(3): 963–973. doi: 10.1109/36.673687[22] YAMAGUCHI Y, MORIYAMA T, ISHIDO M, et al. Four-component scattering model for polarimetric SAR image decomposition[J]. IEEE Transactions on Geoscience and Remote Sensing, 2005, 43(8): 1699–1706. doi: 10.1109/TGRS.2005.852084[23] QUAN Sinong, XIONG Boli, XIANG Deliang, et al. Scattering characterization of obliquely oriented buildings from PolSAR data using eigenvalue-related model[J]. Remote Sensing, 2019, 11(5): 581. doi: 10.3390/rs11050581[24] FAN Hui, QUAN Sinong, DAI Dahai, et al. Seven-component model-based decomposition for PolSAR data with sophisticated scattering models[J]. Remote Sensing, 2019, 11(23): 2802. doi: 10.3390/rs11232802[25] SINGH G and YAMAGUCHI Y. Model-based six-component scattering matrix power decomposition[J]. IEEE Transactions on Geoscience and Remote Sensing, 2018, 56(10): 5687–5704. doi: 10.1109/TGRS.2018.2824322[26] QUAN Sinong, XIANG Deliang, XIONG Boli, et al. A hierarchical extension of general four-component scattering power decomposition[J]. Remote Sensing, 2017, 9(8): 856. doi: 10.3390/rs9080856[27] QUAN Sinong, XIONG Boli, XIANG Deliang, et al. Derivation of the orientation parameters in built-up areas: With application to model-based decomposition[J]. IEEE Transactions on Geoscience and Remote Sensing, 2018, 56(8): 4714–4730. doi: 10.1109/TGRS.2018.2835513[28] YAJIMA Y, YAMAGUCHI Y, SATO R, et al. POLSAR image analysis of wetlands using a modified four-component scattering power decomposition[J]. IEEE Transactions on Geoscience and Remote Sensing, 2008, 46(6): 1667–1673. doi: 10.1109/TGRS.2008.916326[29] SATO A, YAMAGUCHI Y, SINGH G, et al. Four-component scattering power decomposition with extended volume scattering model[J]. IEEE Geoscience and Remote Sensing Letters, 2012, 9(2): 166–170. doi: 10.1109/lgrs.2011.2162935[30] QUAN Sinong, XIONG Boli, XIANG Deliang, et al. Eigenvalue-based urban area extraction using polarimetric SAR data[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2018, 11(2): 458–471. doi: 10.1109/JSTARS.2017.2787591[31] LIU Yemin, XING Shiqi, LI Yongzhen, et al. Jamming recognition method based on the polarisation scattering characteristics of chaff clouds[J]. IET Radar, Sonar & Navigation, 2017, 11(11): 1689–1699. doi: 10.1049/iet-rsn.2017.0121[32] CHEN Siwei, WANG Xuesong, XIAO Shunping, et al. General polarimetric model-based decomposition for coherency matrix[J]. IEEE Transactions on Geoscience and Remote Sensing, 2014, 52(3): 1843–1855. doi: 10.1109/TGRS.2013.2255615 -
Proportional views


- Publishing Ethics
- Journal Insights
- Abstracting & Indexing
- Peer Review Policies
- Guide for Authors
- Conference
- ISSN 2095-283X (Print)ISSN 2097-339X (Online)
- CN 10-1030/TN
- CODEN LXEUAO
About Journal
- Sponsor: China Radio Detection and Ranging Industry Association (CRIA)
- Phone: 010-58887062
- Email:radars@aircas.ac.cn
- Publisher: Leida Xuebao Bianjibu (Editorial office of the Journal of Radars)
Contacts Us

京ICP备20021838号-14
Supported by: Beijing Renhe Information Technology Co. Ltd

Export File
Citation
Format
Content
 DownLoad:
DownLoad:


- Figure 1. Chaff releasing from a ship in an actual scenario (Courtesy: Baidu)
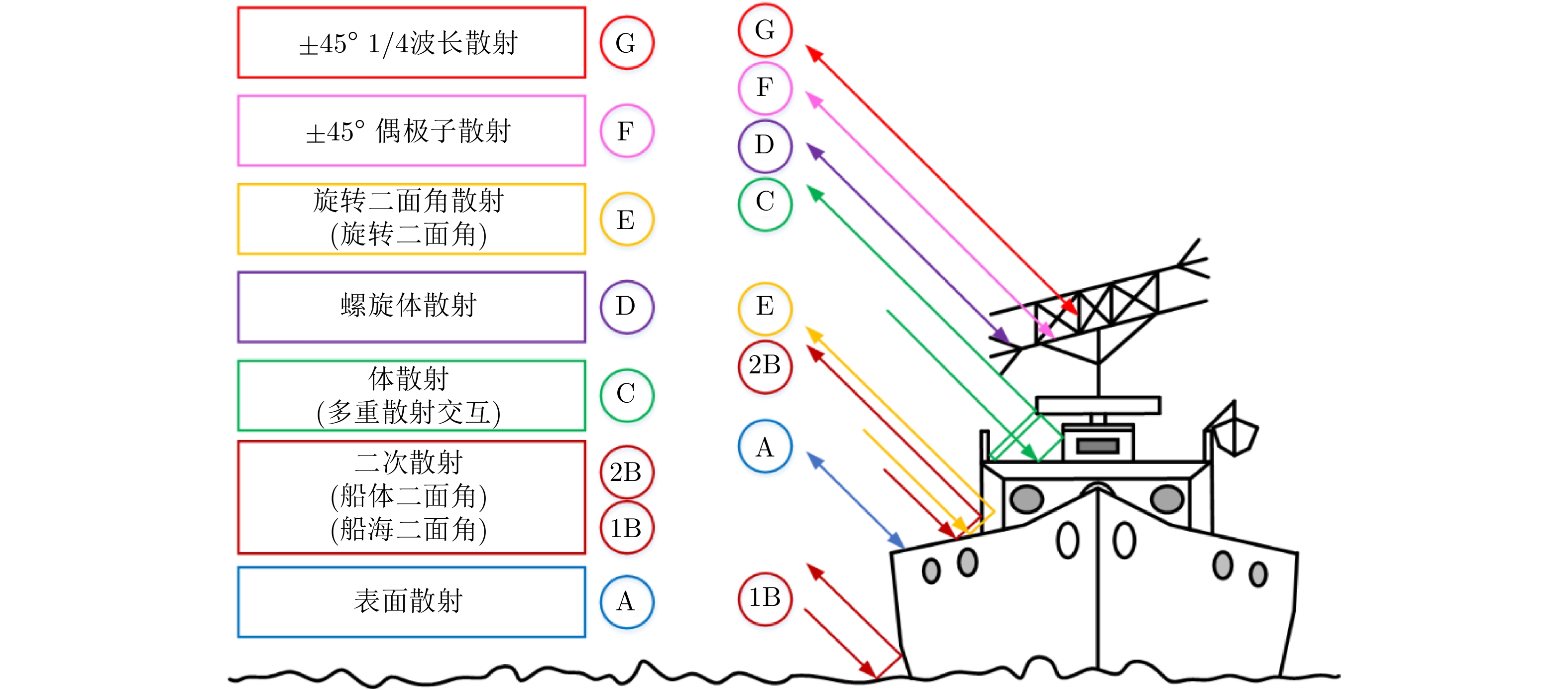
- Figure 2. Various scattering occurred in a ship
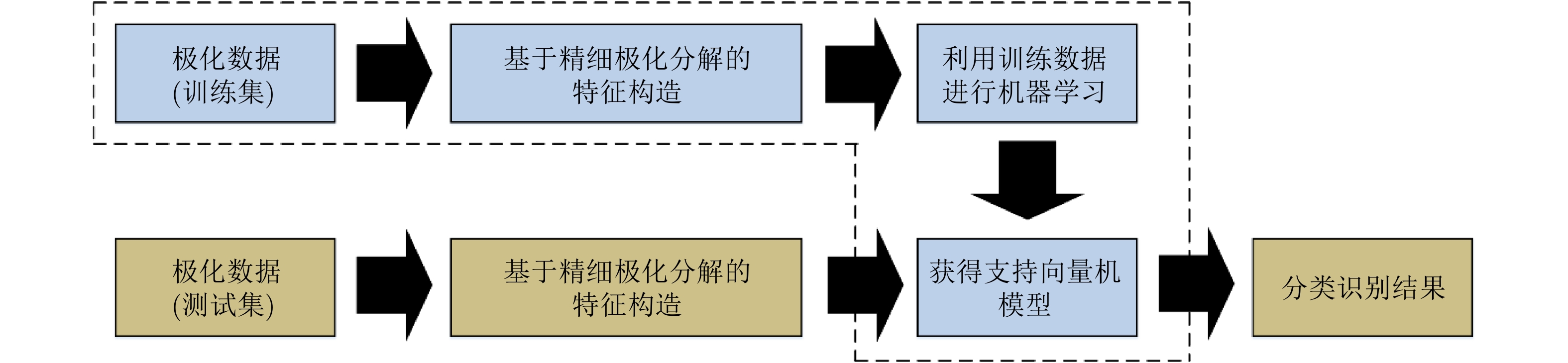
- Figure 3. The flowchart of ship recognition based on the support vector machine
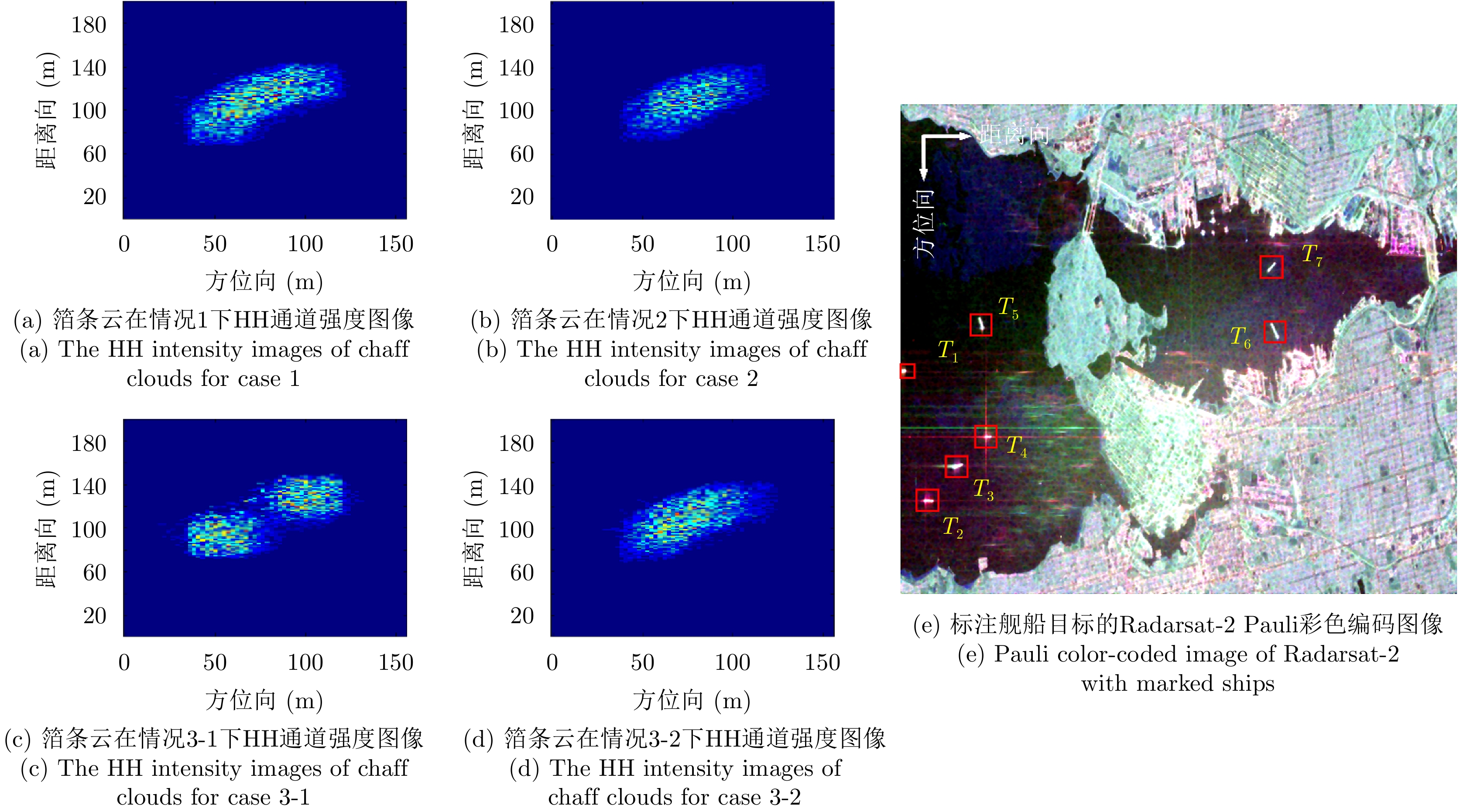
- Figure 4. Simulated and real polarimetric radar data of chaff clouds and ships
- Figure 5. Decomposition results for chaff clouds in different cases
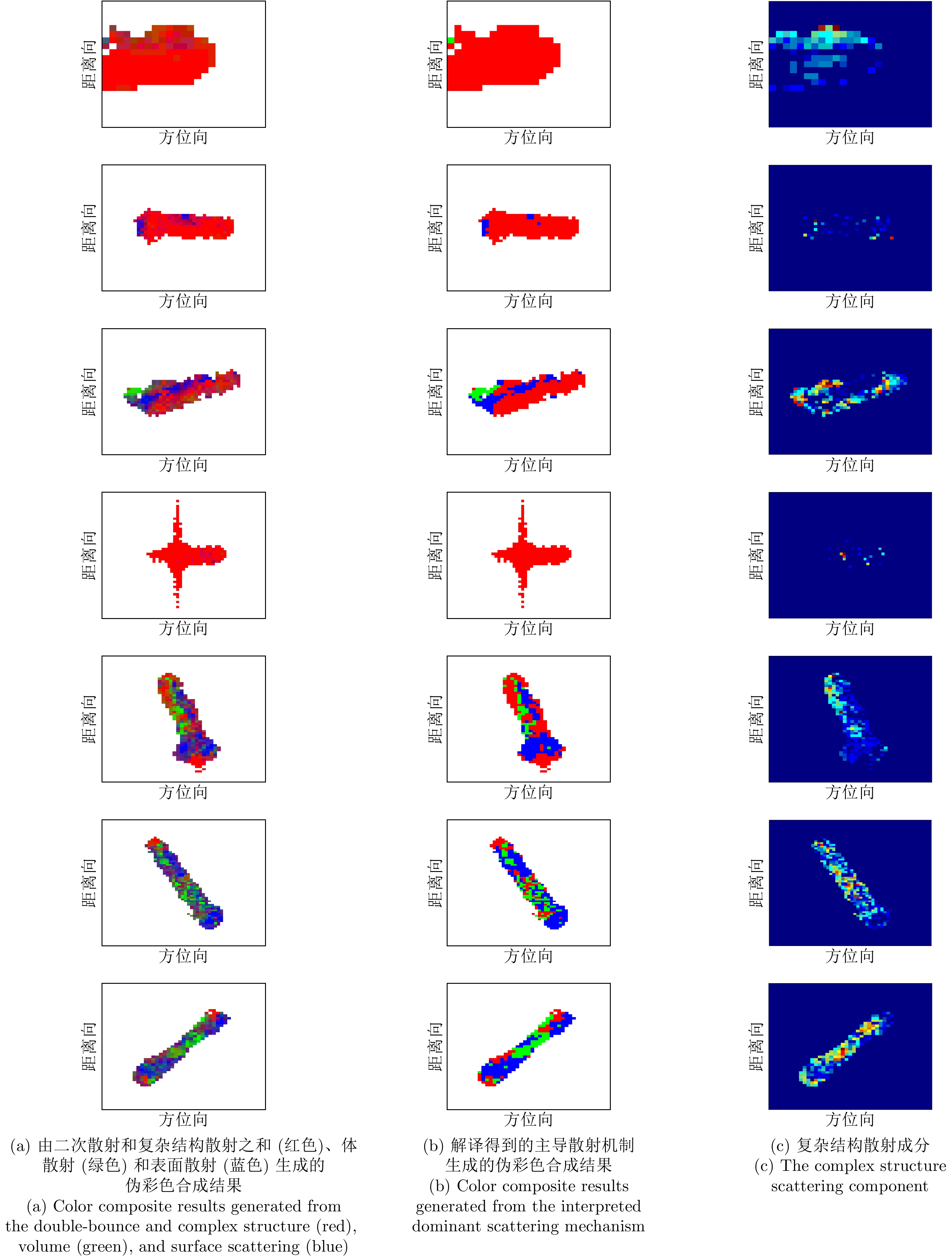
- Figure 6. Decomposition results for ships T1 — T7
- Figure 7. Histograms of polarization scattering angle for chaff clouds
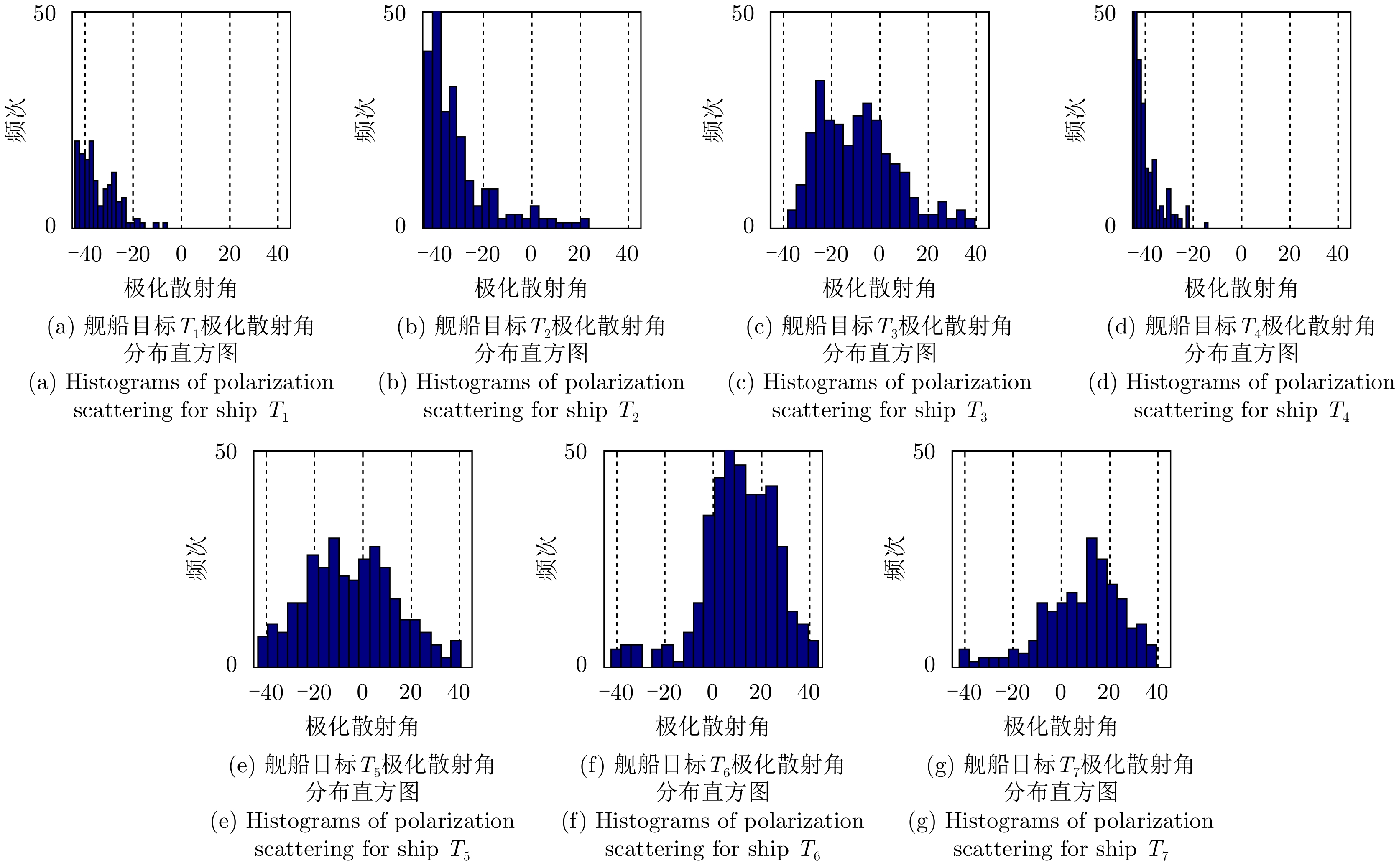
- Figure 8. Histograms of polarization scattering for ships
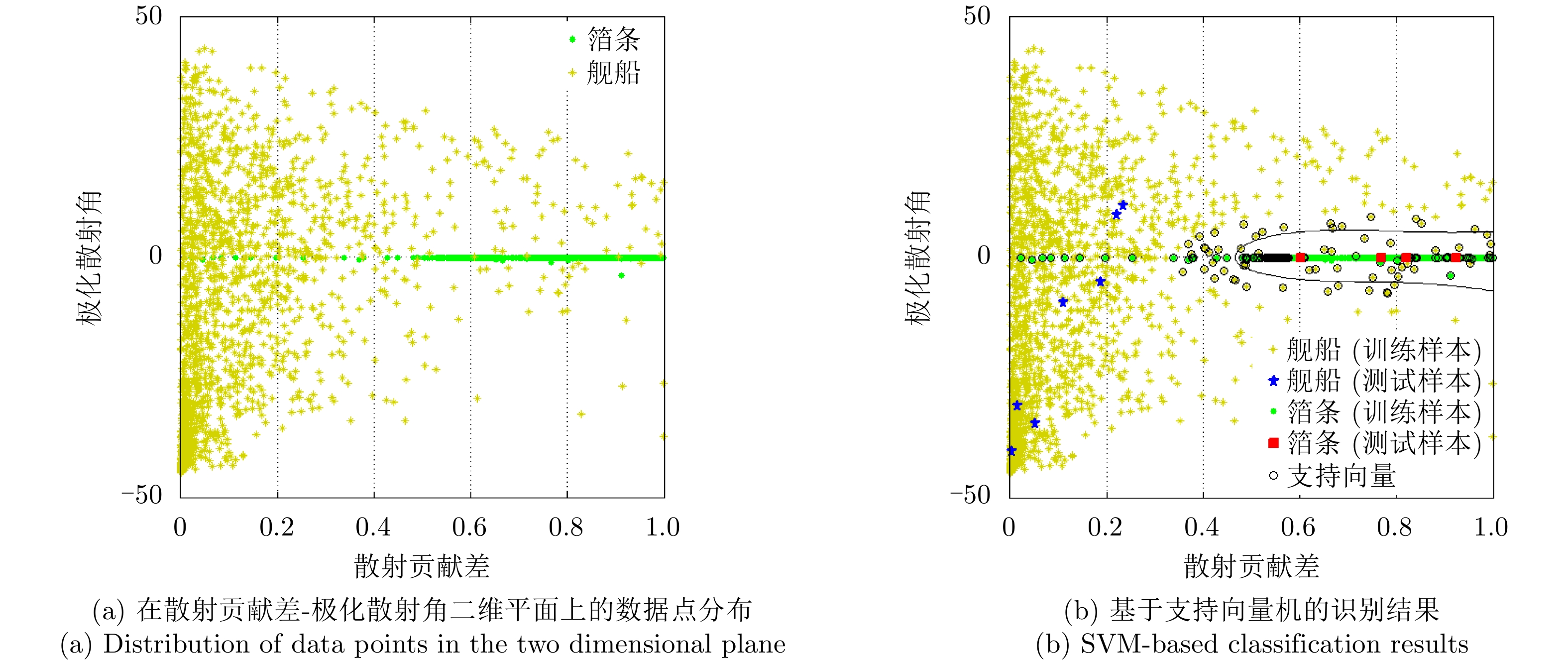
- Figure 9. Recognition results of the proposed method
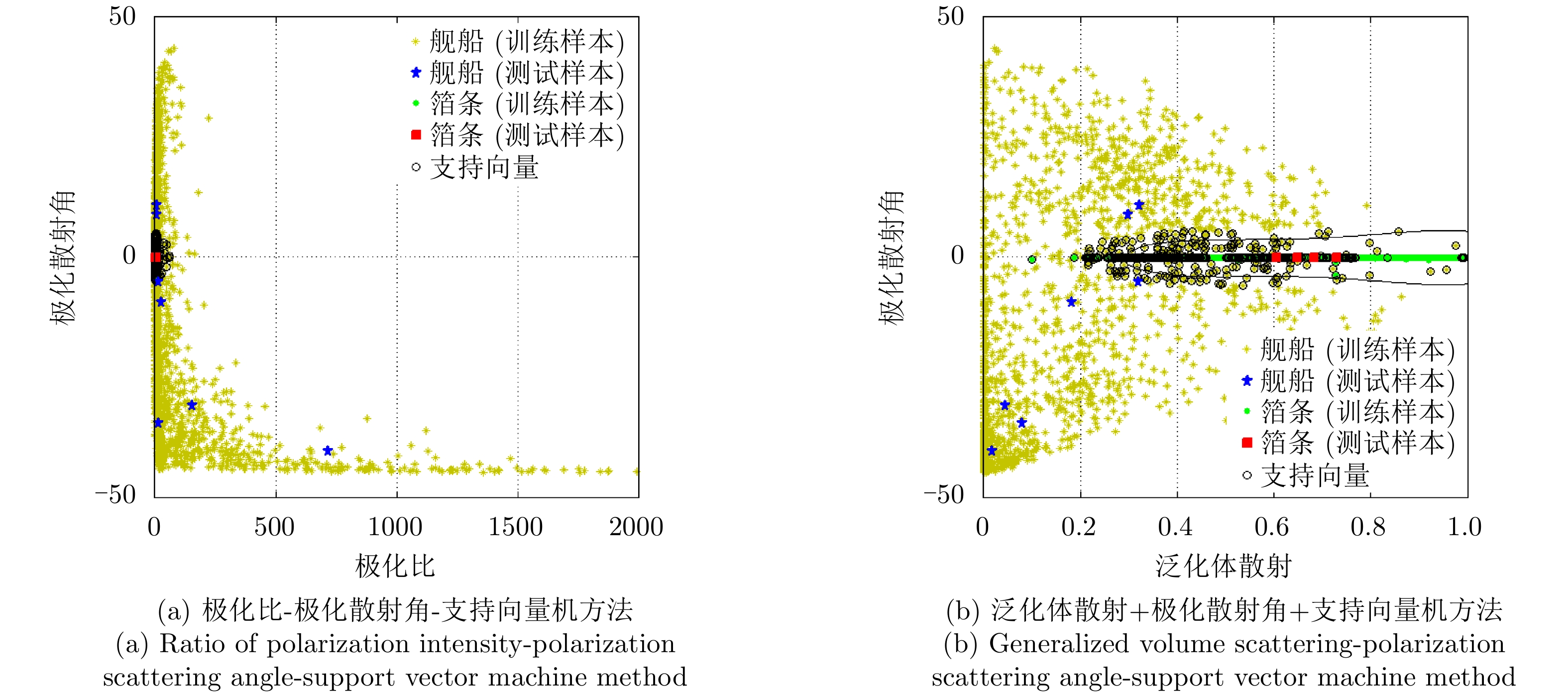
- Figure 10. SVM-based classification results of different composite methods