1.
引言
现代雷达面对着复杂恶劣的电磁环境,包括敌方施放的有源干扰,以及多种电子系统共存引起的干扰。研究者主要采用发射端跳频避开干扰频段[1 和接收端干扰对消[2 两种途径对抗上述同频干扰。为了满足抗干扰和距离分辨的要求,雷达通常工作在相对干净且足够宽的连续频带内,即常规的雷达信号频谱是连续的。然而,当干扰在整个工作频段内密集分布时,雷达难以找到足够大的工作带宽。一个典型的场景是高频地波雷达抗同频干扰,雷达工作在短波频段低端,当广播通信等射频干扰严重时,系统难以找到连续寂静频带[3 。这会导致寂静频带带宽与雷达距离分辨难以兼顾的问题。
为了解决干扰密集分布情形下的上述问题,学者们[4 5 提出改变发射信号的频谱结构,利用多个离散、非连续的频带“组合”成雷达信号所需工作带宽的方法。最早,Green等人[6 通过发射频谱截断的线性调频信号对抗同频干扰。然而,频谱非连续的信号在接收端匹配处理后距离旁瓣较高,需要采用失配处理的方式对其抑制[7 11 ,与此同时,失配处理会导致目标信噪比的损失。为了解决上述问题,Lindenfeld[12 、Liu等人[13 、Wei等人[14 考虑在发射端对雷达信号进行优化设计以同时应对同频干扰和距离高旁瓣问题。为了获得更高的设计自由度,非连续谱信号也从线性调频信号扩展为脉间频率捷变/脉内复杂调制的信号。为了非连续谱信号的更好应用,Nunn等人[15 、Yu等人[16 、Wei等人[17 分析了干扰功率谱分布以及信号频谱结构对信号多种性能的影响,不仅局限于信号旁瓣的性能,在此基础上建立了基于频带选取与频谱塑形的非连续谱信号设计方法。大量学者针对上述非连续谱信号优化设计算法进行了研究,提出了一系列行之有效的信号求解方法[18 28 。随着雷达技术的发展,有学者考虑将非连续谱信号设计扩展到多通道体制类雷达,实现空频二维联合抗干扰。
综上所述,非连续谱雷达通过对发射信号的频谱结构进行设计实现抗同频干扰的目的。这种抗干扰设计可以从快时间域、慢时间域以及空域3个维度进行。本文重点介绍了非连续谱信号设计准则与约束、雷达工作频带选取与频谱塑形以及波形合成算法3方面非连续谱雷达信号设计中的重点与难点,并对研究的发展脉络和最新动态进行了总结与整理。
2.
非连续谱雷达典型工作场景与信号形式
非连续谱雷达信号是为了解决频域干扰密集场景下雷达探测的带宽需求与紧张的频谱资源之间难以兼容的问题提出的。其工作场景中包含了敌方施放的有源干扰,以及多种电子系统共存引起的干扰。本文总结了非连续谱雷达信号的典型工作场景以及信号形式。
2.1
非连续谱雷达典型工作场景
表1
按照干扰的来源,非连续谱雷达工作场景可以分为两类:第1类工作场景中干扰来源于敌方干扰机等设备,雷达需要发射抗干扰性能良好的信号对抗同频干扰;第2类工作场景中干扰来源于同平台工作的电子设备,其他电子设备的用频优先级高于雷达,雷达需要以机会的方式寻找频谱间隙发射信号。
按照干扰的时变特性,非连续谱雷达工作场景可以分为慢时变干扰场景和快时变干扰场景两类。(1)慢时变干扰场景中,干扰源在单个信号积累周期内保持(基本)恒定,具有时变平稳特性;(2)快时变干扰场景中,干扰源在一个积累周期内会发生较大的变化,具有时变非平稳的特性。
如表2
2.2
非连续谱信号形式
如表3
对于上述信号形式,通过设计单个脉冲信号的频率调制函数f ( t ) φ ( n ) f m a m
2.3
非连续谱信号与工作场景
不同的场景下雷达信号的设计需求与适用形式不尽相同。场景中干扰的来源影响了雷达信号的设计需求,在第1类与第2类场景中,信号设计优先考虑雷达自身的抗干扰性能;而在第3类与第4类场景中,信号设计优先考虑多设备的共存性能,发射信号在其他设备工作的频带上能量需低于一定阈值。场景中干扰的时变特性则会影响适用的信号形式,在第1类与第3类场景中,雷达可以选择相位编码以及频率调制形式的信号以对抗时域慢变干扰;在第2类与第4类场景中,雷达可以选择频率编码以及复合调制形式的信号以应对时域快变干扰。本文按照干扰的时变特性,分别介绍两种场景下的非连续谱信号实例。
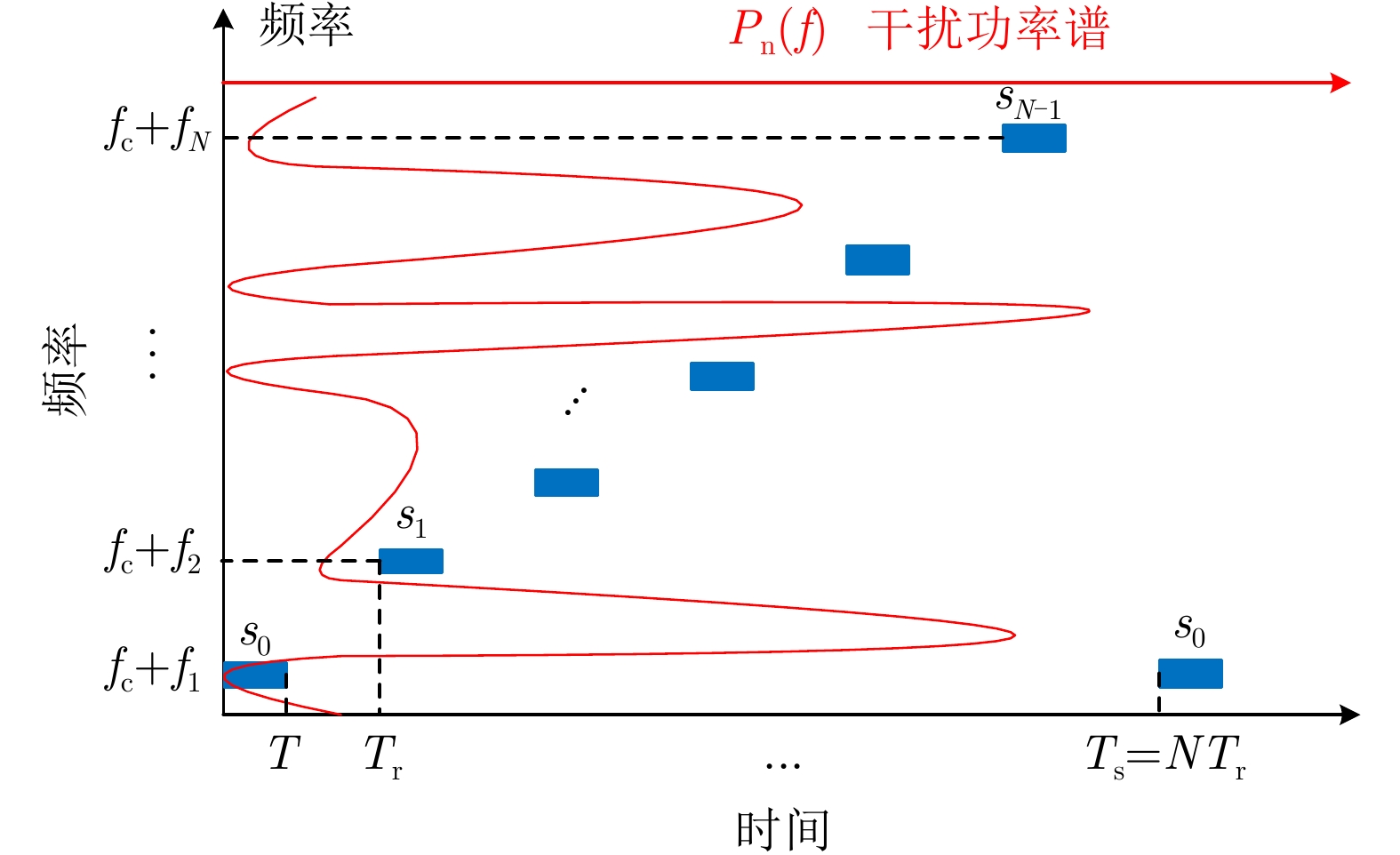
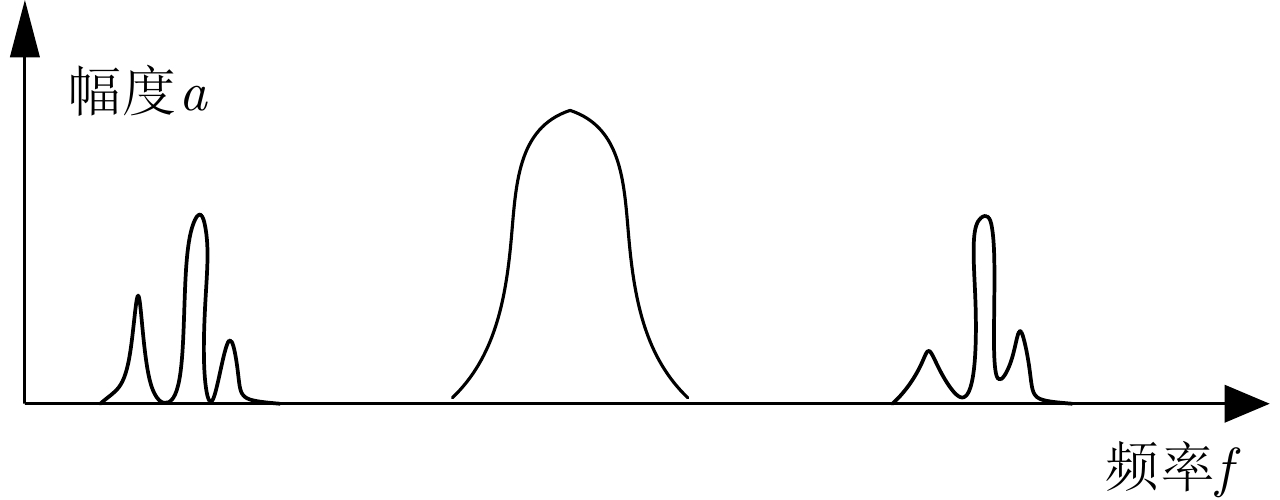
高频地波雷达是一个典型慢时变式场景。场景中存在基站、广播电台、敌方干扰机设备等多种形式的干扰源。这些干扰源具有分布密集、带宽“狭窄”、辐射强度大、短时间内时域平稳等特点。图1
除此之外,毫米波频段下的雷达与通信频谱共存是一个典型快时变式场景。场景中雷达与通信设备共存于同一频段,且分立安放。通信干扰源具有数量较多、分布密集、空时非平稳的特点。图2
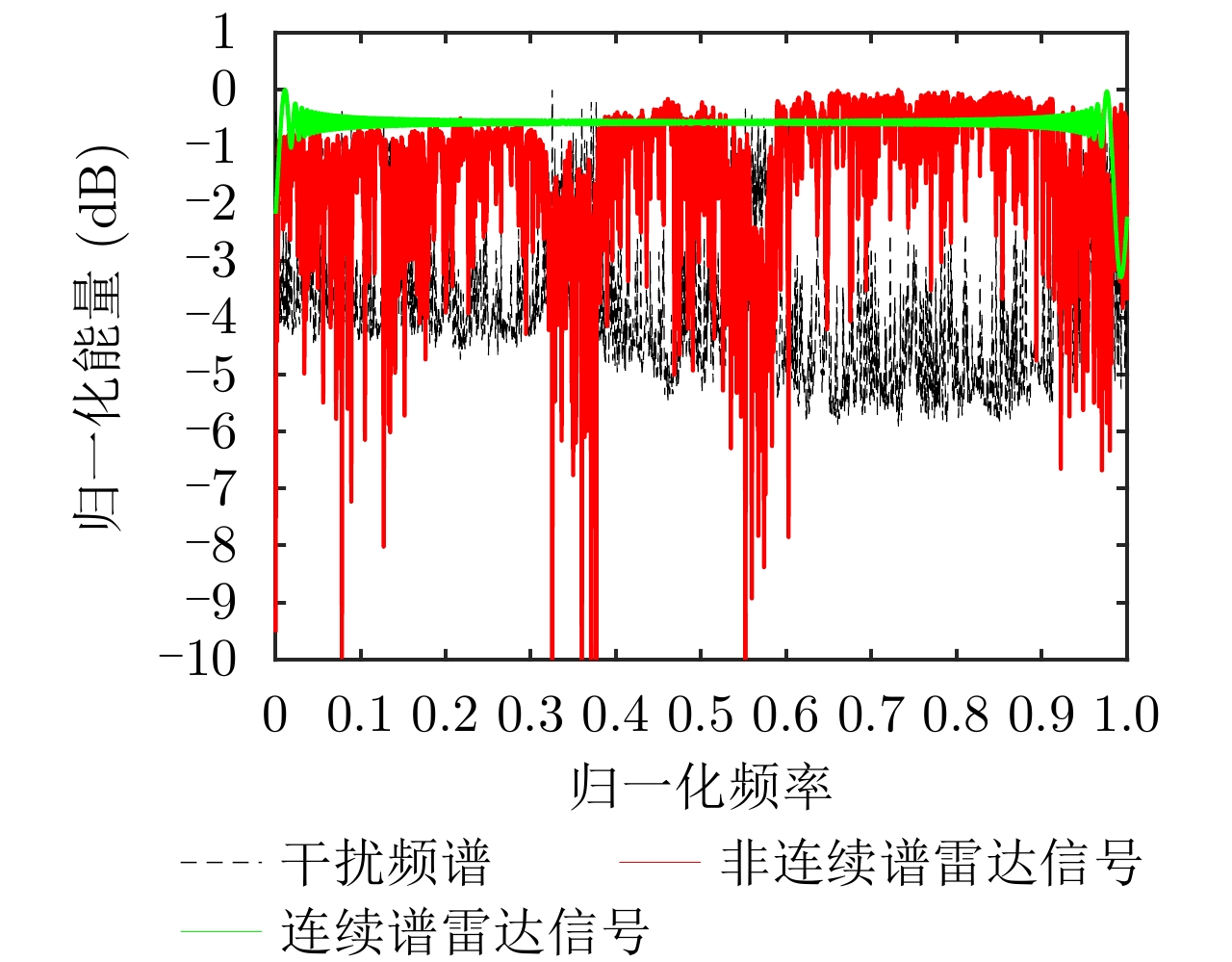
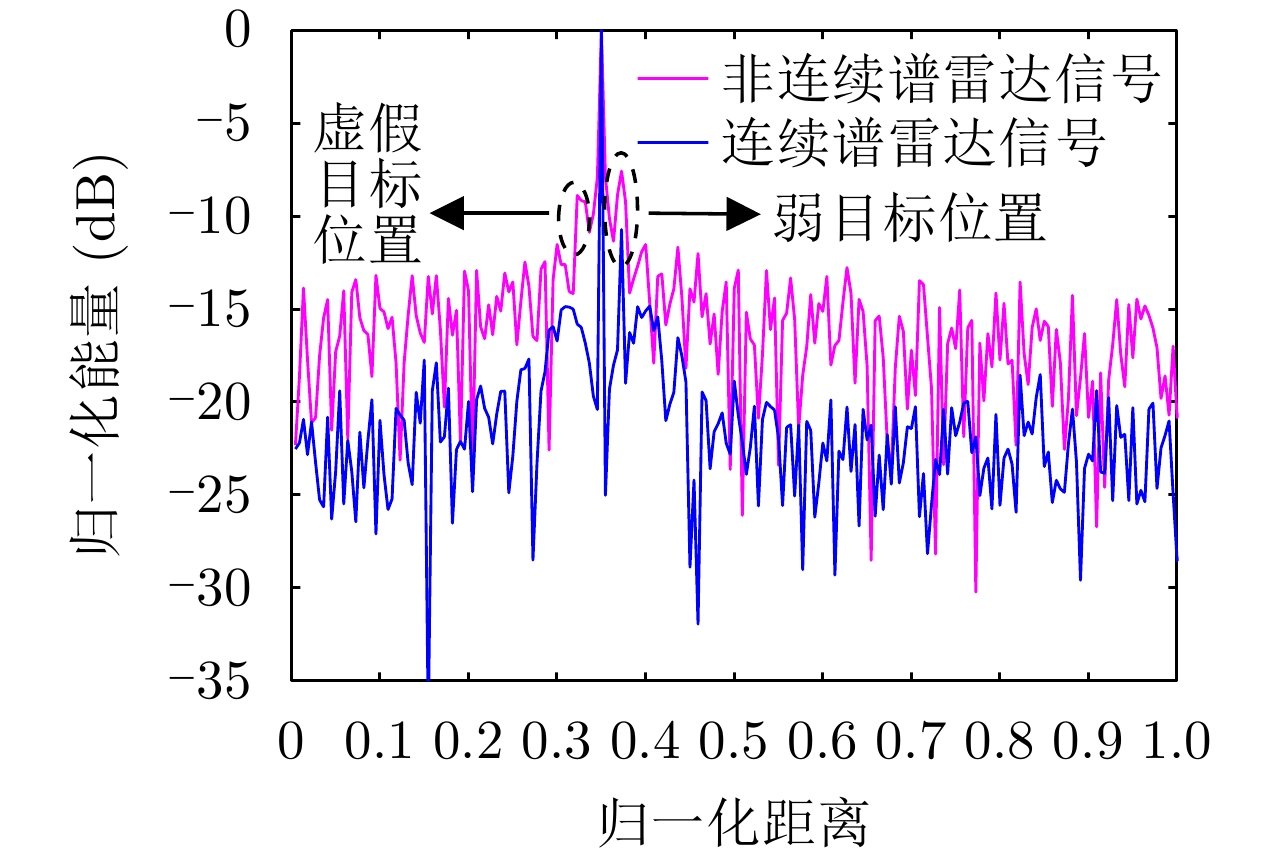
非连续谱信号为了获得更好的频谱兼容与抗干扰性能,通过能量策略分配的方式在干扰所在的频带/点处设置凹陷,利用多个离散的频带组成发射信号频谱。但是,由于信号的时频域之间满足傅里叶变换对关系,对雷达发射信号设置频谱凹陷不可避免地会影响其探测性能。如图3
3.
非连续谱信号设计
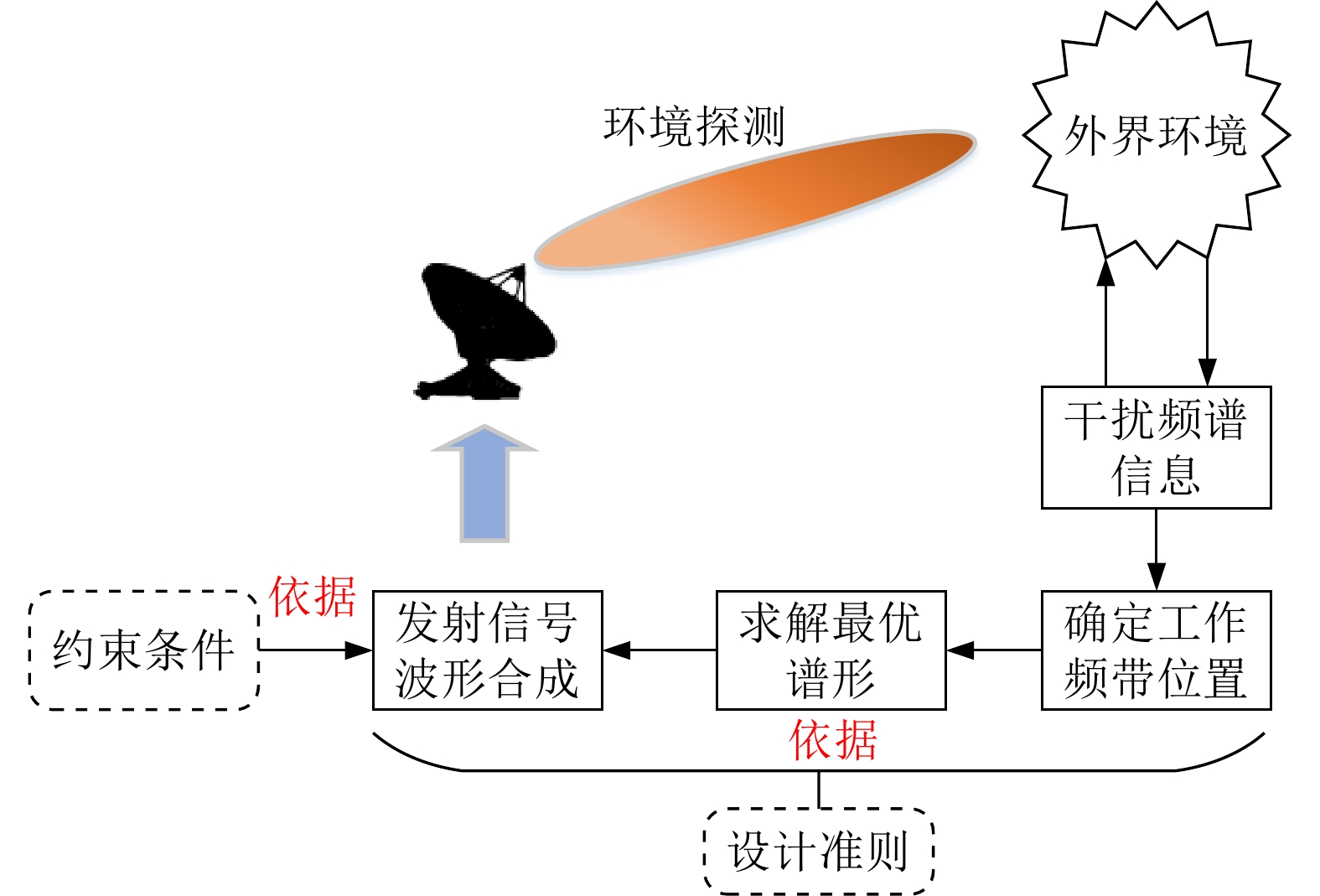
非连续谱雷达可以通过辅助传感器感知周围频谱环境生成无线电地图,然后根据环境信息设计最适合当前工作环境的非连续谱信号。非连续谱雷达信号的设计流程如图4
相比于传统雷达信号设计,非连续谱信号的设计增加了工作频带位置选取与最优谱形求解的步骤以适应时变非平稳的工作环境。在非连续谱信号的设计过程中,信号设计准则选择的准确性、工作频带位置选取的合适性以及波形合成算法的有效性均会对非连续谱雷达的探测性能造成影响。针对上述问题,本文重点介绍了非连续谱信号设计研究的3个方面:非连续谱信号设计准则与约束条件、非连续谱信号频带选取与频谱塑形、非连续谱信号波形合成算法。
3.1
非连续谱信号设计准则与约束条件
在非连续谱信号设计与应用的过程中,非连续谱雷达根据工作任务以及硬件水平选取对应的设计准则与约束条件。如表4
(1) 最大化信干噪比(Signal to Interference plus Noise Ratio, SINR)准则
在非连续谱雷达工作的第1类与第2类场景中,以极小化雷达接收机滤波后的电磁干扰能量(通常考虑的滤波形式为匹配滤波)作为设计准则,即最大化接收机的信干噪比。最大化信干噪比准则在大部分条件下等价最大化检测概率准则[29 。一般SINR越大,检测概率越大。以SINR为准则设计的信号功率谱通常会呈现与干扰功率谱“反匹配”的特征[30 。
(2) 最小化同频干扰准则
在非连续谱雷达工作的第3类与第4类场景中,以极小化雷达对其他电磁用户的同频干扰作为设计准则,发射的信号在划定阻带内的泄漏功率不得超过规定阈值。
(3) 最大化距离分辨性能准则
距离分辨性能主要包括两方面,即距离分辨率和距离维旁瓣水平。距离分辨率表征了发射波形能够区分两个具有相同径向速度目标的最小间距;而距离维旁瓣水平则反映了一个散射点对其他具有相同径向速度散射点的影响,常用的距离分辨率评价指标有积分主瓣能量(Integrated Mainlobe Energy, IME)、主瓣3 dB宽度等,常用的距离旁瓣评价指标有积分旁瓣能量(Integrated Sidelobe Energy, ISE)、峰值旁瓣水平(Peak Sidelobe Level, PSL)以及加权积分相关能量(Weighted Integrated Correlation Energy, WeI-CE)等。除此之外,对于距离-多普勒二维的情况,一般采用最优化信号模糊函数作为设计准则。
出于硬件可实现的角度考虑,雷达信号的设计需要满足一定的约束条件,常用的约束条件如表5 [1 ,需要使其满足一定的峰均比约束,峰均比的定义为信号幅度平方的峰值与均值的比,即发射机的功率效率[31 。为了获取更大的发射功率,可以设置峰均比为1,此时发射的信号具有恒定的包络,约束条件变为恒包络约束。
在实际的雷达信号设计过程中,设计准则与约束条件存在可替换性。因此也可引入相似性约束,控制所设计信号与参考信号的相似性,以获得参考信号的某些优良特性[32 。非连续谱信号的设计准则和约束条件选取的合适与否不仅会影响最终的信号性能,还会决定设计过程的难易程度以及执行效率,因此需要根据需求灵活、策略地选取。
3.2
非连续谱信号频带选取与频谱塑形
根据雷达的探测需求确定了设计准则后,雷达需要根据设计准则在完整可用频带内选择出最适合工作的频带位置并进行频谱塑形。频带选择与频谱塑形与干扰环境的功率谱息息相关,本小节介绍了两类常用的干扰功率谱模型并整理了频带选择与频谱塑形方法。
3.2.1
干扰功率谱模型
根据模型建立的数据依据,干扰功率谱模型可以分为基于场景特征信息认知的功率谱模型和基于场景统计信息认知的功率谱模型两种。
(1) 基于场景特征信息认知的干扰功率谱模型
基于场景特征信息认知的功率谱模型依据的数据是辅助传感器直接获取的数据。根据干扰功率谱数据获取的完整程度分为频率调制模型与矩形扩展模型两种。
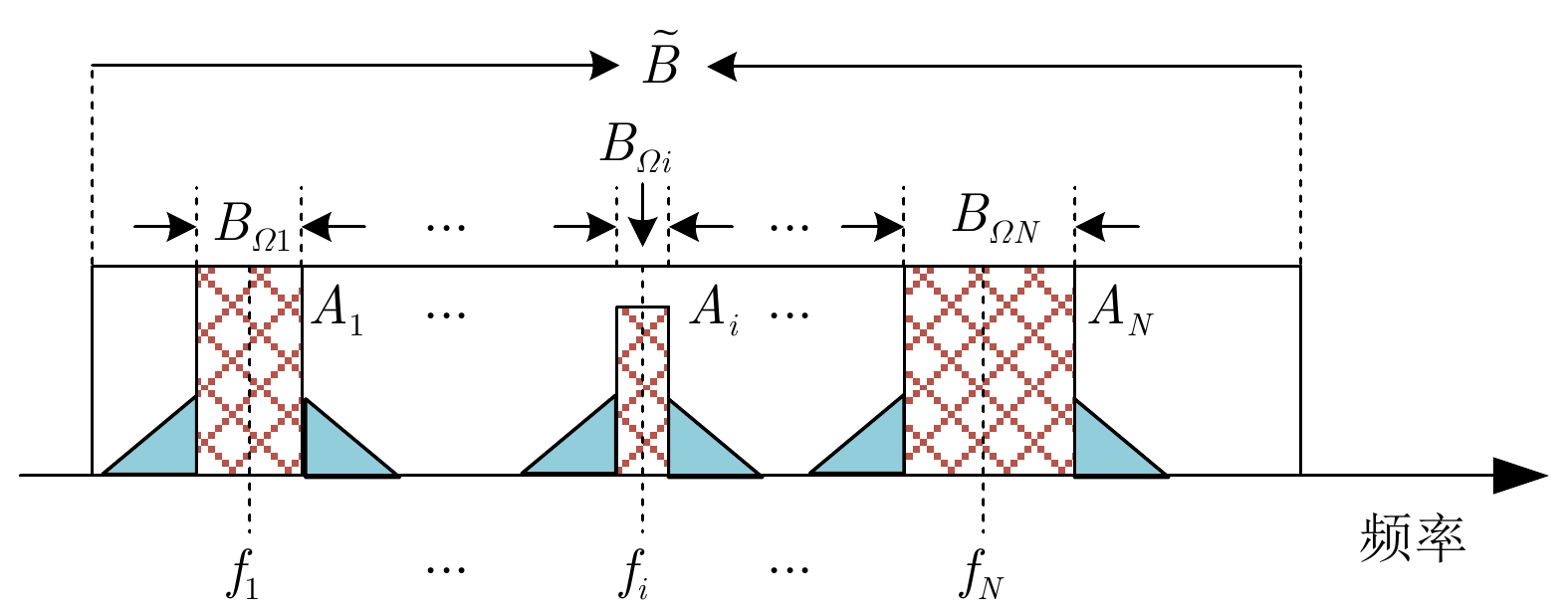
当辅助传感器可以准确且完整地获取雷达工作环境频谱数据时,可以建立如式(1)所示的频率调制模型对雷达工作环境的功率谱进行描述
式中, a\left( f \right) \varphi \left( f \right)
如图5 图6 \tilde B N 为干扰源个数,网格部分为干扰功率谱矩形窗函数,每个干扰源的带宽分别为\left[ {B_{\varOmega 1}},{B_{\varOmega 2}}{\text{,}} \cdots{\text{,}} {B_{\varOmega N}} \right] \left[ {{f_1},{f_2}{\text{,}}\cdots{\text{,}}\,{f_N}} \right] \left[ {{A_1},{A_2}{\text{,}}\cdots{\text{,}}{A_N}} \right] B = \tilde B - \displaystyle\sum\nolimits_{i = 1}^N {{B_{\varOmega i}}} \rho = {B/ {\tilde B}}
(2) 基于场景统计信息认知的干扰功率谱模型
基于场景统计信息认知的功率谱模型建立依据是多批次场景数据的典型特征信息的统计分布函数,常见的有基于伯努利过程的统计分布模型与基于随机矩阵的统计分布模型。
基于伯努利过程的统计分布模型,利用伯努利过程来对完整可用频带范围内每个频点的可用概率进行建模。假定完整可用频带采样点为M 点,干扰功率谱用式(2)所示的概率函数进行表示,每个频点要么为0要么为1。其中0表示存在干扰,1表示不存在干扰。
式中,m = 0, 1, \cdots ,M - 1 p ,也可以称信号的频谱效率为p (信号的不连续比为 1 - p p 可以通过可用频点数量与完整功率谱带宽的采样点M 的比值表示
基于伯努利过程的干扰功率谱模型描述了雷达工作环境中频谱资源的可用概率。
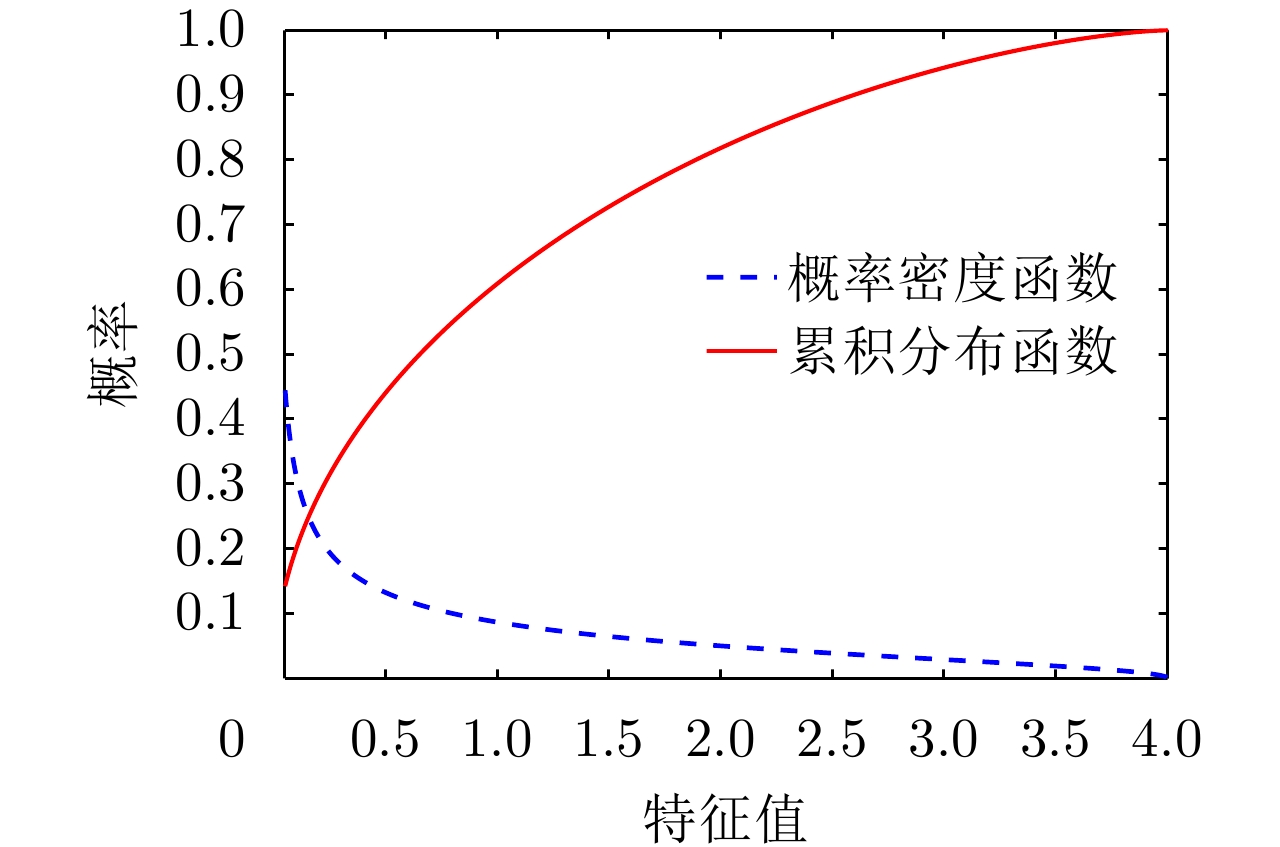
除此之外,Jones等人[33 通过随机矩阵理论对接收端干扰与噪声的联合协方差矩阵进行建模,提出基于随机矩阵的统计分布模型。假定联合协方差矩阵为{{\boldsymbol{K}}_{{\text{MP}}}}
式中,N 为大于接收端采样点数的正整数,向量{\boldsymbol{Z}} \in \mathbb{N}{{\text{ }}^{N \times N}} {Z_{ij}} \in \mathbb{N}{\text{ }}\left( {0,1} \right) {{\boldsymbol{K}}_{{\text{MP}}}} 图7
式(5)是根据工程经验获取的[34 35 。之后通过反变换采样的方法获取其累积分布函数。
上述两种模型重点考虑了非连续谱雷达工作环境中频域数据的统计分布规律, 表6
3.2.2
工作频带位置选取与频谱塑形
根据3.2.1节整理的干扰功率谱模型,本小节介绍了非连续谱信号的工作频带位置选取与频谱塑形部分的研究工作。
(1) 非连续谱信号工作频带选取
非连续谱雷达信号的工作频带选取主要考虑发射信号距离分辨性能的最大化。影响信号分辨性能的干扰功率谱参数有干扰能量强度、干扰功率谱非连续比、干扰频段中心间距以及分布结构等。干扰能量强度直接影响非连续谱信号的抗干扰性能,因此现有研究大多是在干扰能量强度一定且均匀分布时,分析干扰功率谱非连续比、干扰频段中心间距以及分布结构这3个典型参数对信号距离分辨性能的影响。
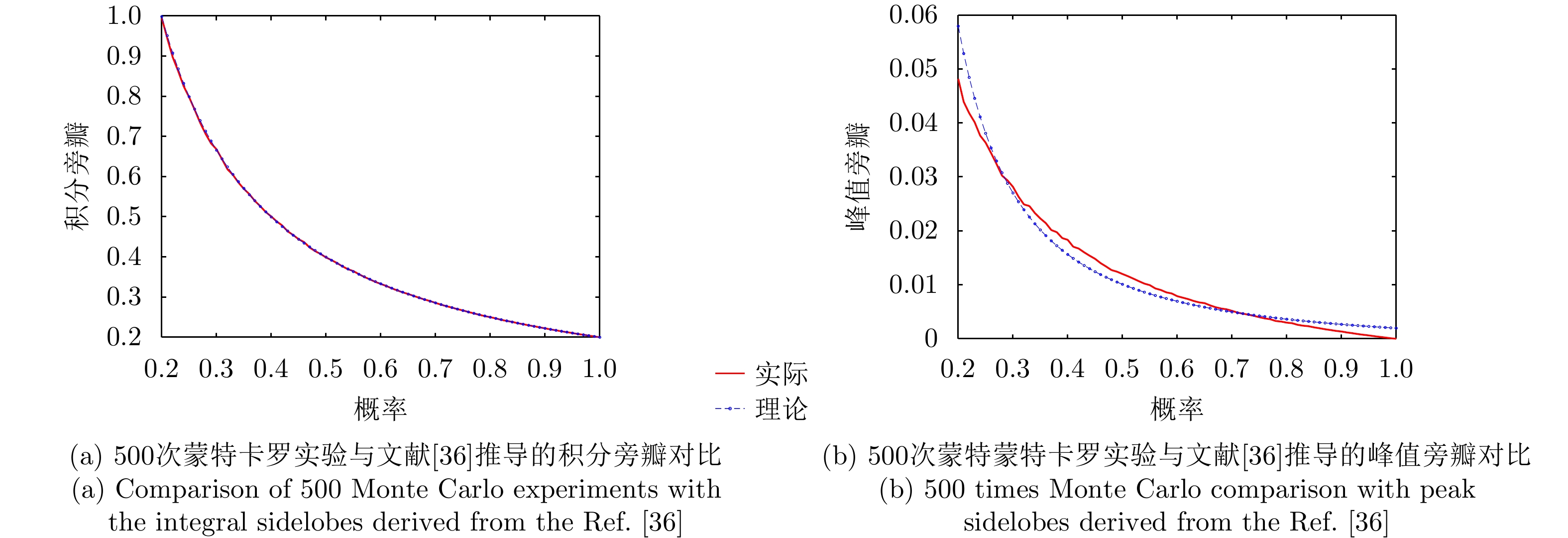
对于干扰功率谱非连续比对信号峰值旁瓣以及积分旁瓣性能的影响,Frost团队[36 基于统计分布的频谱模型给出了定量分析,通过统计信号自相关函数的旁瓣部分的数值特性,发现其实部与虚部满足高斯分布,之后推导出非连续谱信号的理论积分旁瓣比与峰值旁瓣比满足
式中,p 为非连续比,M 为功率谱总采样点数, \beta
如图8
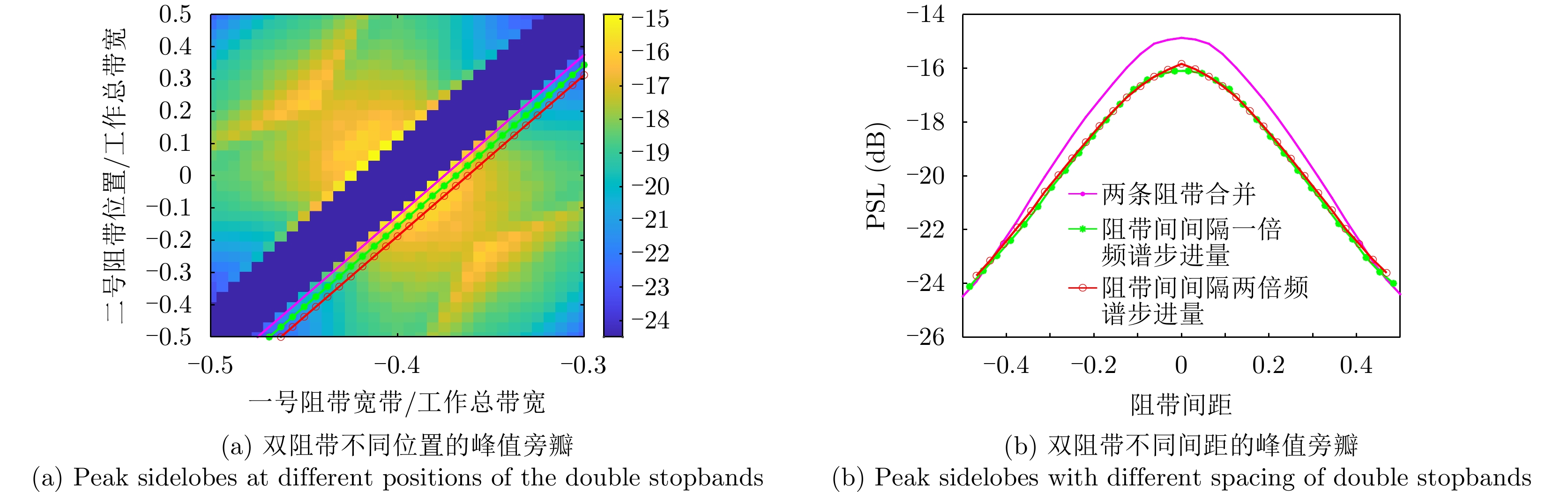
对于多阻带干扰频段中心频率间距对信号峰值旁瓣性能的影响,毛智能[37 根据多阻带矩形扩展模型给出了图9
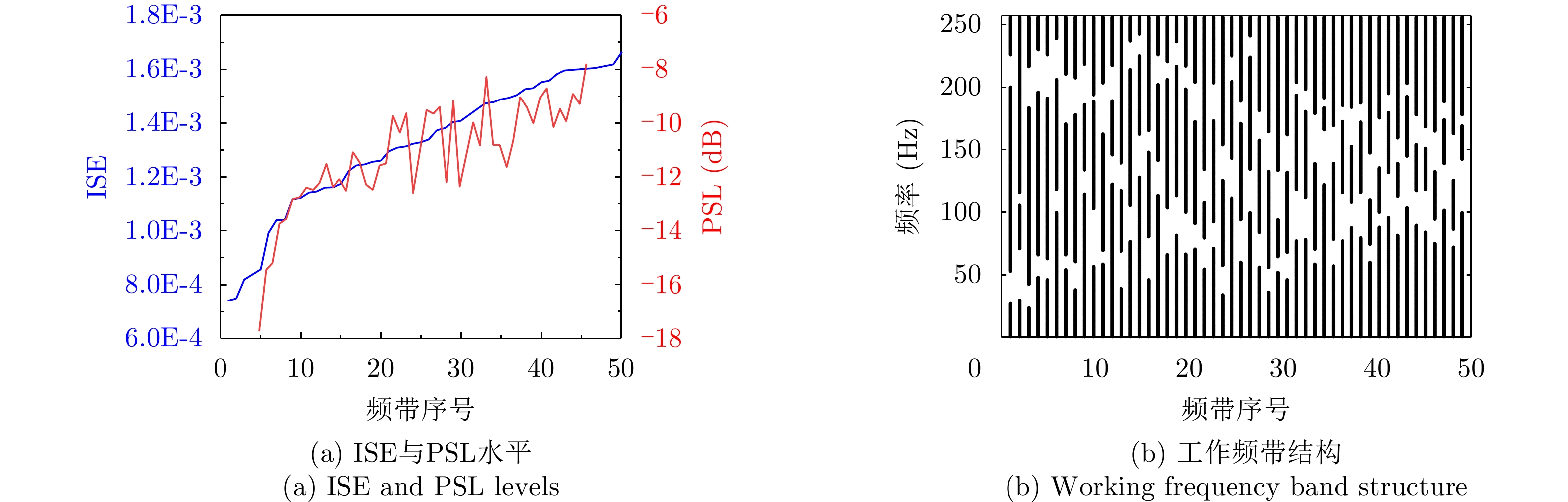
对于干扰频带分布结构对信号峰值旁瓣性能的影响,Zhao等人[38 通过数值实验的方式,定性分析了频谱结构与信号ISE以及PSL水平的关系。如图10
非连续谱信号工作平台选取的研究工作揭示了干扰功率谱结构与发射信号分辨性能之间的联系,指导雷达选择非连续比低、干扰分布于完整可用频带边缘的工作频带,但是上述研究没有考虑干扰能量复杂分布情形下的工作频带选择问题。
(2) 非连续谱信号频谱塑形
在确定了非连续谱信号的工作频带后,雷达根据分辨需求进行频谱塑形,求取最优频谱形状(功率谱),即雷达可用频带内的最优能量分配。
对于阻带约束下的信号最优功率谱形式一直有专家学者尝试给出说明。Wang等人[39 40 分别基于离散和连续频谱模型给出了广义积分旁瓣电平(Generalised Integrated Sidelobe Level, GISL)最大时的信号最优功率谱分布形式,即在频谱无干扰区间,信号的功率谱满足均匀分布。但是文献[39 40 [41 建立了式(8)形式的频谱约束条件下加权积分旁瓣最小化的最优谱形求解问题
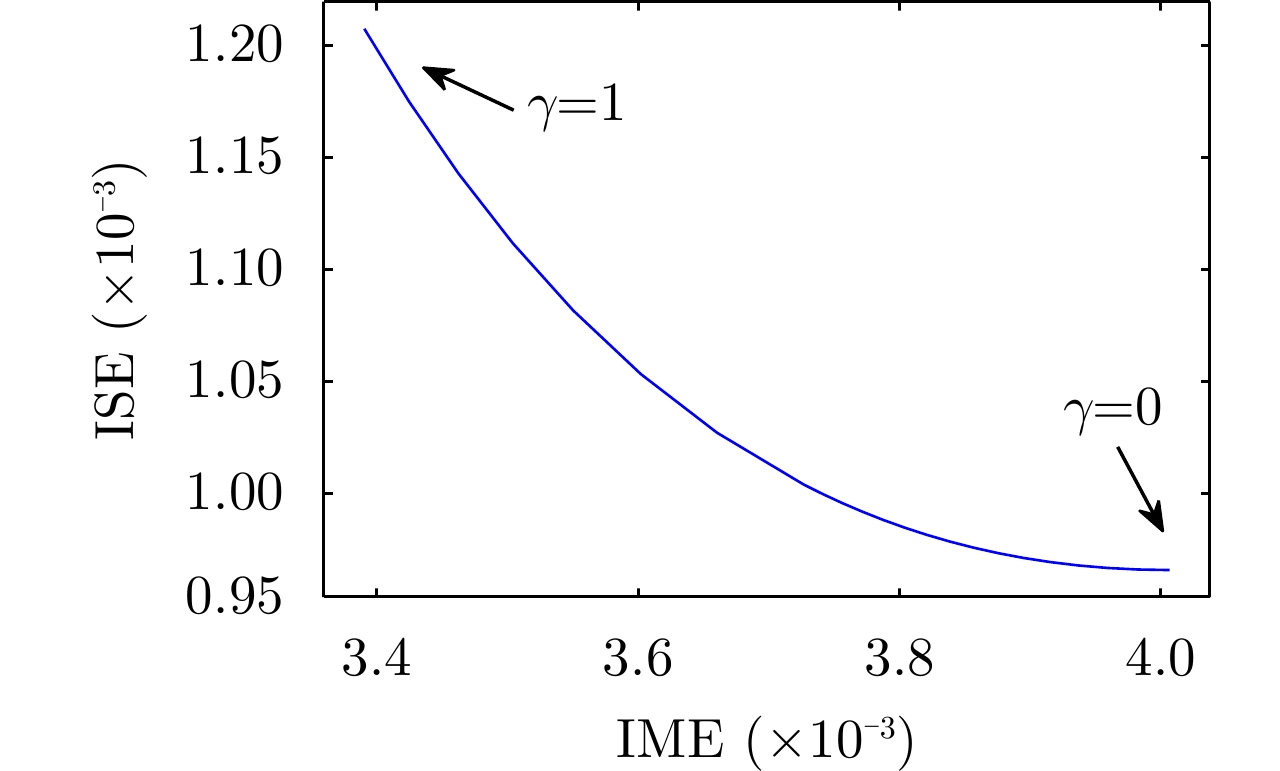
式中, {p_s} \gamma \gamma \in \left[ {0,1} \right] \gamma \gamma 图11 \gamma
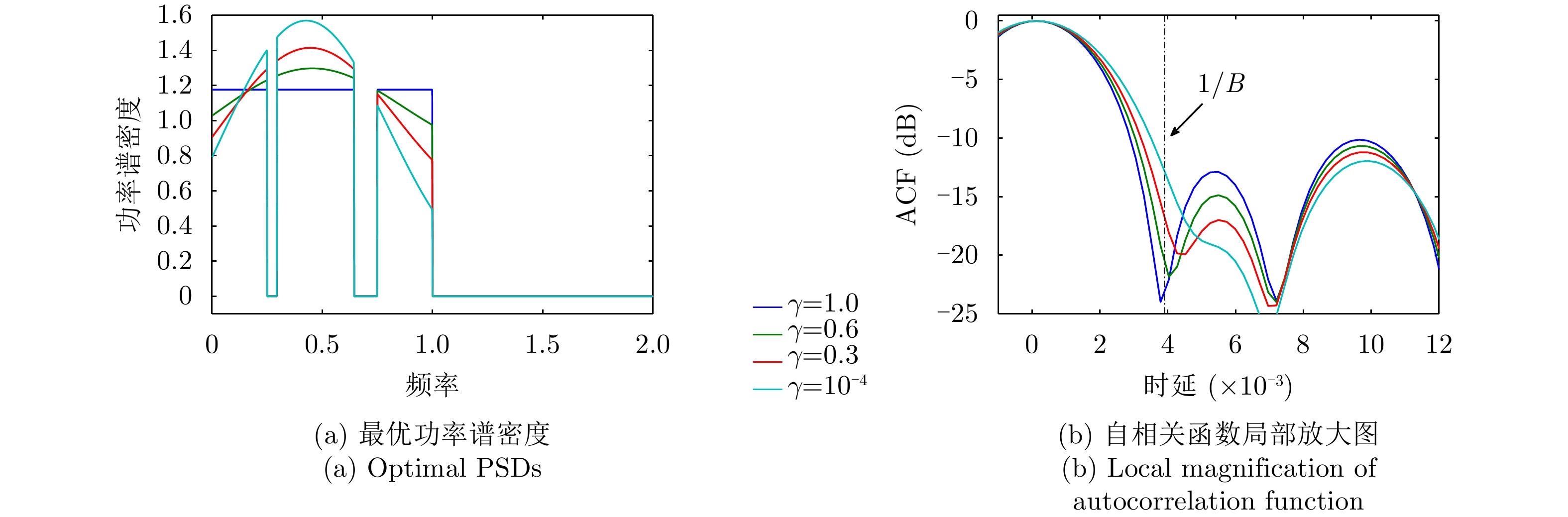
Zhao等人[42 将式(8)转换为LCQP问题,利用凸优化算法对其进行求解,得到了如图12 1/\rho B γ <1时,目标函数侧重点更倾向于距离旁瓣抑制,此时自相关函数表现出更低的距离旁瓣,但随之而来的是展宽的主瓣,此时信号最优功率谱密度在工作频带内呈锥削状分布,并且折中因子γ 越小,这种“锥削”越明显。与此同时,当频谱凹陷水平足够深时,继续要求更深的频谱凹陷几乎不再影响对应的最优功率谱密度以及可获得IME与ISE性能。
上述研究工作的前提是信号能量恒定,但在实际雷达信号设计过程中需要兼顾其他约束条件,因此信号的实际功率谱往往无法真正达到理论最优值,其实际性能也将无法达到研究中计算的下确界,只能尽可能接近,因此衍生出了许多非连续谱信号波形合成算法。
3.3
非连续谱信号时域波形合成
雷达根据分辨需求选择发射信号的工作频带位置并求解出最优谱形后,要得到发射信号需要进一步进行时域波形合成。如何使得合成的时域信号频谱与最优频谱差距最小是非连续谱信号设计研究的重要问题。不同雷达信号的波形合成算法不尽相同,本文按照快时间域、慢时间域以及空频联合域的维度对非连续谱信号的波形合成算法进行了整理。
3.3.1
快时间域信号波形合成
非连续谱信号快时间域波形合成通过设计发射脉冲的调制函数使得发射信号的频谱与理论最优谱形差距最小,其是研究最多也是最广泛的非连续谱信号。快时间域的非连续谱信号调制方式有频率调制与相位编码两种。频率调制信号是通过对脉冲内的相位进行非线性调制来获得大时宽带宽积的信号,常用的频率调制信号有线性调频(Linear Frequency Modulation, LFM)信号与非线性调频(Non-Linear Frequency Modulation, NLFM)信号。相位编码信号是一种通过将宽脉冲等分为若干子脉冲,然后采用不同的相位对子脉冲进行调制的信号,常用的相位编码信号有连续相位编码信号与离散相位编码信号。
对于频率调制信号,Gerlach等人[43 、Oechslin等人[44 通过频谱置零、间隙线性调频等波形合成技术实现频谱拟合,但是上述方式合成的LFM信号会具有较高的距离旁瓣,需要在接收端通过信号处理方法来对其进行抑制。为了降低发射信号的高距离旁瓣,Weitzel等人[45 利用非线性放大元件的放大特性(Linear amplification using Nonlinear Components, LINC)提出一种非线性调频信号的波形合成方法,生成具有频谱凹陷的NLFM信号,但是这类方法生成的信号产生了显著的振幅调制,会造成目标信噪比损失。Jakabosky等人[46 提出一种基于序列投影算法的NLFM信号波形合成算法,其可利用LINC框架生成具有期望幅度和频谱的时域信号。NLFM信号虽然可以获得较好的频谱拟合特性,但是由于其是一种时域连续调制信号,其求解十分复杂,往往通过先设计一组相位编码信号,之后通过函数差值的方式获取发射信号,例如多相编码调频(Polyphase-Coded FM, PCFM)信号。
对于相位编码信号,Durbin[47 方法是一种简单易行的波形合成方法。其将最优功率谱傅里叶反变换得到信号的自相关函数,之后利用Levinson算法求出最佳线性预测系数得到自相关函数估计,之后将自相关函数估计写成Yule Walker方程得到时域信号。但是这种方法没有考虑信号的幅度约束,如恒包络或者峰均比约束。对于恒包络信号的波形合成,可以利用傅里叶反变换差值以及驻定相位原理生成时域信号[48 。但是上述方法得到的时域信号频谱与最优频谱间有较大的差距。
为了可以合成满足约束且更加贴合最优频谱的时域信号,许多研究将信号波形合成建模为一个最优化求解过程,利用不同的优化求解算法得到非连续谱相位编码信号。如表7
二次型优化问题将抗干扰性能与分辨性能作为优化问题,约束中包含幅度约束与频谱约束。对于这类问题,Zhuang等人[49 、He等人[50 、Bişkin等人[51 针对连续编码的相位编码信号的波形合成分别基于随机进化算法与CAN (Cyclic Algorithm New)提出了一系列高效有用的方法,但其对于离散编码情形并不适用。Maio等人[52 、Aldayel等人[53 、Cui等人[54 、Yu等人[55 分别基于半正定松弛(SemiDefinite Relaxation, SDR)、非凸约束松弛迭代、坐标下降、交替方向乘子 (Alternating Direction Method of Multipliers, ADMM)等算法框架提出了适合于强阻带约束下的非连续谱连续/离散相位编码信号求解算法。
二次型优化问题将频谱形状作为约束条件,并将部分阻带约束松弛为干扰带内能量最小化问题,因此其获取的信号频谱会与模板谱形存在偏差。许多专家学者基于最小化模板残差准则提出了四次型优化形式的波形合成算法。Ge等人[56 对于四次型优化问题在恒模约束下提出了基于时频交替变换的拟合方法,所合成的信号可较好地折中自相关特性与频谱共存能力。Yang等人[57 将其推广至峰均比约束,提出了一种基于四次优化的高效频谱模板匹配方法,且PAR越大,拟合效果越好。除此之外,Liang等人[58 、Rowe等人[59 、Yu等人[16 、 Zhao等人[17 给出了一类基于频谱塑形的波形合成方法,以获得给定频谱模板的恒模相位编码信号,但是其频谱模板没有考虑信号的距离旁瓣特性。为了使得合成的信号频谱逼近期望频谱,Rowe等人[59 研究了基于最小二乘拟合误差为准则的频谱模板匹配问题。在文献[42 60 [61 进一步提出了基于MM的快速算法。
除此之外,在先验信息不足时,也可以通过最小化阻带内能量最大频点的能量分配获得较为稳定的信号性能,即求解极大极小型优化问题。由于序列的最大值在数学上可以通过无穷范数进行表示,因此极大极小型优化问题属于无穷范数优化问题。Mao等人[62 通过选取一个数值较大的p 范数来逼近无穷范数,将优化问题转换为有限次多项式问题,之后利用共轭梯度法进行求解。但是,p 范数在序列模值较小时,存在钝化区间。文献[25 \left( {1/p} \right)\ln \left( {\displaystyle\sum\nolimits_n {{{\text{e}}^{p{z_n}}}} } \right) z 的无穷范数,之后利用MM算法进行求解,获得峰值旁瓣性能良好的快时间域信号。
3.3.2
慢时间域信号波形合成
非连续谱信号慢时间域波形合成通过设计发射脉冲串的调制函数使得发射信号的频谱与理论最优谱形差距最小。传统的慢时间域抗干扰是在发射多个脉冲的基础上,采用跳频技术,对每个脉冲的载频进行调制,继而通过控制每个脉冲的载频来规划雷达信号在频带内的能量分布,从而避开频域上的干扰,再通过对多个脉冲的相参处理来获得等效大带宽的高分辨性能。雷达信号的分辨性能和旁瓣水平取决于波形的带宽和调制特性,对于非连续谱慢时间域波形来说,每个脉冲的附加频移f m
对于慢时间域信号波形合成,Liu等人[13 通过约束跳频频带分布,利用遗传算法来优化跳频频率来抑制波形的距离旁瓣。虽然优化后的跳频波形仍具有较高的旁瓣水平,但这是首次在发射端尝试通过波形设计来抑制波形距离旁瓣。之后,Gladkova[63 提出了一种分段步进频率信号,并通过改变各段步进频率信号的频率间隔抑制距离旁瓣水平。针对非连续谱跳频优化高度非凸的问题,Zhao等人[14 先通过修正密度锥形法对非连续谱跳频频率初始化,获得具有良好特性的跳频初值,之后将跳频初值作为跳频可行集,消除可行集非凸的问题,并在求解过程中利用NuFFT提升算法执行效率。
传统频率编码信号为了获得较好的波形旁瓣性能需要增加跳频脉冲数,而脉冲数的增加,在脉冲周期一定时必然将导致波形周期过长,或波形周期一定时导致脉冲周期过小。因此, Wei等人[64 提出一种复合调制信号的波形合成算法,对发射信号进行脉内相位编码\频率调制、脉间频率编码,并利用共轭梯度法实现信号求解。如图13
3.3.3
空频联合域信号波形合成
传统的非连续谱信号设计通过设计频谱形状来实现频谱拥堵环境下的多设备共存。但是随着电磁设备数量的飞速增长以及MIMO技术的发展,单纯频域的抗干扰手段已经不足以适应愈发拥堵的频谱环境,需要引入新的抗干扰自由度—空域,即空频联合抗干扰。
早期的空频抗干扰技术,频域与空域作为两个维度独立进行,先对其中一个维度的干扰进行抑制后再实现另一个维度的干扰抑制,并且其多应用于接收端。随着天线技术与无线电地图探测技术的发展,发射端的空频联合域干扰抑制成为可能。这种空频域联合抗干扰技术既可以是单发单收体制雷达的发射天线方向图与频谱联合设计,也可以是多发多收体制雷达的信号的协方差矩阵与通道功率分配的联合设计。
2012年,美国卡耐基梅隆大学Saruthira团队通过设计扫描雷达的旋转方式,使得通信系统可以在同频段雷达旁瓣内进行有效通信。之后,Aubry等人[65 66 、Tang等人[67 将非连续谱信号空频联合域波形合成问题引入MIMO雷达系统中。当已知干扰辐射源的空频域信息时,MIMO雷达通过发射通道间部分相关的信号,使得发射信号能量尽可能集中在感兴趣区间,减少干扰区域的能量辐射,提高雷达的探测性能。MIMO体制下的空频联合域波形合成旨在生成满足特定方向图与频谱形状的多通道时域信号[68 71 。
对于空频联合抗干扰的非连续谱信号波形合成,Chen等人[72 建立频谱兼容特性与方向图设计联合考虑的优化问题,利用MM算法对其进行迭代求解,使得求解的信号在干扰所在的空频联合域中能量最小。除此之外,为了获取更好的目标探测性能,Yao等人[73 将探测目标的冲击响应函数引入目标求解函数中,利用1阶泰勒展开的方式将目标函数转化为QCQP优化问题进行求解,得到的多通道时域信号既满足了空频二维抗干扰需求,又实现了目标接收信干噪比的最大化。Cheng等人[74 则将其扩展到多目标场景,提出了最小方差无失真响应-对偶上升算法(Minimum Variance Distortionless Response and Dual Ascent Method, MVDR-DAM),其假设目标和干扰距离门不同,通过迭代求解的方式获取最优接收滤波器与发射信号。除此之外,为了约束雷达每路发射通道的自相关特性,Shi等人[75 引入ADMM算法实现对信号单独通道的ISL与PSL性能的控制。
4.
总结与展望
本文对非连续谱雷达信号设计的理论与方法进行了总结和归纳,从多方面梳理了非连续谱信号的设计思路,介绍了常见的优化准则与约束条件,并基于干扰功率谱模型,分别介绍了非连续谱信号的频带选取、频谱塑形以及波形合成算法的研究进展。可以看出,发射频谱非连续形式的信号是解决雷达在复杂电磁环境下工作问题的一种重要途径。为了适应复杂多变的工作场景,非连续谱雷达具有丰富的信号形式,并衍生出了一系列信号设计方法。但现有研究中仍存在一定不足:(1)干扰功率谱模型建模选取的典型参数较少,无法对复杂电磁环境进行有效描述;(2)干扰功率谱结构与信号性能之间的分析仍不足,没有建立复杂同频干扰下信号性能分析模型;(3)对于多准则的非连续谱信号设计方法研究仍不足,无法适应现代雷达的多探测任务需求。
一方面,随着无线电技术的发展,全球传感器设备对无线电频谱的需求日益增加;另一方面,现代电子战对雷达设备的干扰变得更加灵活多变,雷达设备很难使用一段完整连续无干扰的电磁频谱,非连续频谱形式的雷达发射信号应用会更加普遍。因此,以应对频谱拥堵问题的自适应波形设计必然仍将是雷达界的研究热点。

 Submit Manuscript
Submit Manuscript Peer Review
Peer Review Editor Work
Editor Work

 下载:
下载:








































 DownLoad:
DownLoad: