
 Submit Manuscript
Submit Manuscript Peer Review
Peer Review Editor Work
Editor Work- Home
- Articles & Issues
-
Data
- Dataset of Radar Detecting Sea
- SAR Dataset
- SARGroundObjectsTypes
- SARMV3D
- AIRSAT Constellation SAR Land Cover Classification Dataset
- 3DRIED
- UWB-HA4D
- LLS-LFMCWR
- FAIR-CSAR
- MSAR
- SDD-SAR
- FUSAR
- SpaceborneSAR3Dimaging
- Sea-land Segmentation
- SAR Multi-domain Ship Detection Dataset
- SAR-Airport
- Hilly and mountainous farmland time-series SAR and ground quadrat dataset
- SAR images for interference detection and suppression
- HP-SAR Evaluation & Analytical Dataset
- GDHuiYan-ATRNet
- Multi-System Maritime Low Observable Target Dataset
- DatasetinthePaper
- DatasetintheCompetition
- Report
- Course
- About
- Publish
- Editorial Board
- Chinese
| Citation: | WAN Xuanshen, LIU Wei, NIU Chaoyang, et al. Black-box attack algorithm for SAR-ATR deep neural networks based on MI-FGSM[J]. Journal of Radars, 2024, 13(3): 714–729. doi: 10.12000/JR23220

|
Black-box Attack Algorithm for SAR-ATR Deep Neural Networks Based on MI-FGSM
DOI: 10.12000/JR23220 CSTR: 32380.14.JR23220
More Information-
Abstract
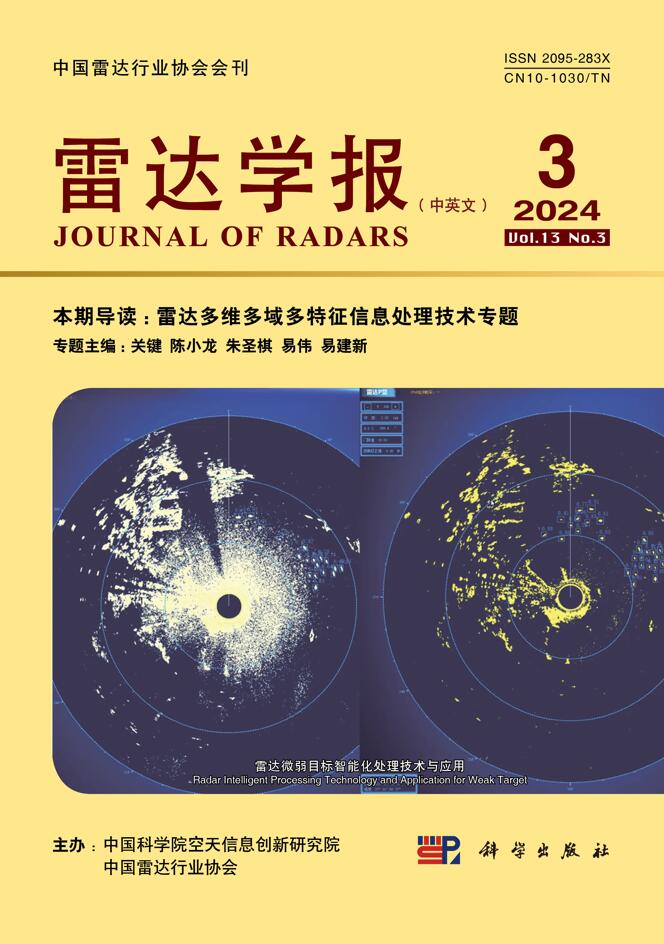
The field of Synthetic Aperture Radar Automatic Target Recognition (SAR-ATR) lacks effective black-box attack algorithms. Therefore, this research proposes a migration-based black-box attack algorithm by combining the idea of the Momentum Iterative Fast Gradient Sign Method (MI-FGSM). First, random speckle noise transformation is performed according to the characteristics of SAR images to alleviate model overfitting to the speckle noise and improve the generalization performance of the algorithm. Second, an AdaBelief-Nesterov optimizer is designed to rapidly find the optimal gradient descent direction, and the attack effectiveness of the algorithm is improved through a rapid convergence of the model gradient. Finally, a quasihyperbolic momentum operator is introduced to obtain a stable model gradient descent direction so that the gradient can avoid falling into a local optimum during the rapid convergence and to further enhance the success rate of black-box attacks on adversarial examples. Simulation experiments show that compared with existing adversarial attack algorithms, the proposed algorithm improves the ensemble model black-box attack success rate of mainstream SAR-ATR deep neural networks by 3%~55% and 6.0%~57.5% on the MSTAR and FUSAR-Ship datasets, respectively; the generated adversarial examples are highly concealable. -

-
References
[1] XU Yan and SCOOT K A. Sea ice and open water classification of SAR imagery using CNN-based transfer learning[C]. 2017 IEEE International Geoscience and Remote Sensing Symposium, Fort Worth, TX, USA, 2017: 3262–3265. doi: 10.1109/IGARSS.2017.8127693.[2] ZHANG Yue, SUN Xian, SUN Hao, et al. High resolution SAR image classification with deeper convolutional neural network[C]. International Geoscience and Remote Sensing Symposium, Valencia, Spain, 2018: 2374–2377. doi: 10.1109/IGARSS.2018.8518829.[3] SHAO Jiaqi, QU Changwen, and LI Jianwei. A performance analysis of convolutional neural network models in SAR target recognition[C]. 2017 SAR in Big Data Era: Models, Methods and Applications, Beijing, China, 2017: 1–6. doi: 10.1109/BIGSARDATA.2017.8124917.[4] ZHANG Ming, AN Jubai, YU Dahua, et al. Convolutional neural network with attention mechanism for SAR automatic target recognition[J]. IEEE Geoscience and Remote Sensing Letters, 2022, 19: 4004205. doi: 10.1109/LGRS.2020.3031593.[5] CHEN Sizhe, WANG Haipeng, XU Feng, et al. Target classification using the deep convolutional networks for SAR images[J]. IEEE Transactions on Geoscience and Remote Sensing, 2016, 54(8): 4806–4817. doi: 10.1109/TGRS.2016.2551720.[6] 徐丰, 王海鹏, 金亚秋. 深度学习在SAR目标识别与地物分类中的应用[J]. 雷达学报, 2017, 6(2): 136–148. doi: 10.12000/JR16130.XU Feng, WANG Haipeng, and JIN Yaqiu. Deep learning as applied in SAR target recognition and terrain classification[J]. Journal of Radars, 2017, 6(2): 136–148. doi: 10.12000/JR16130.[7] 吕艺璇, 王智睿, 王佩瑾, 等. 基于散射信息和元学习的SAR图像飞机目标识别[J]. 雷达学报, 2022, 11(4): 652–665. doi: 10.12000/JR22044.LYU Yixuan, WANG Zhirui, WANG Peijin, et al. Scattering information and meta-learning based SAR images interpretation for aircraft target recognition[J]. Journal of Radars, 2022, 11(4): 652–665. doi: 10.12000/JR22044.[8] HUANG Teng, ZHANG Qixiang, LIU Jiabao, et al. Adversarial attacks on deep-learning-based SAR image target recognition[J]. Journal of Network and Computer Applications, 2020, 162: 102632. doi: 10.1016/j.jnca.2020.102632.[9] 孙浩, 陈进, 雷琳, 等. 深度卷积神经网络图像识别模型对抗鲁棒性技术综述[J]. 雷达学报, 2021, 10(4): 571–594. doi: 10.12000/JR21048.SUN Hao, CHEN Jin, LEI Lin, et al. Adversarial robustness of deep convolutional neural network-based image recognition models: A review[J]. Journal of Radars, 2021, 10(4): 571–594. doi: 10.12000/JR21048.[10] 高勋章, 张志伟, 刘梅, 等. 雷达像智能识别对抗研究进展[J]. 雷达学报, 2023, 12(4): 696–712. doi: 10.12000/JR23098.GAO Xunzhang, ZHANG Zhiwei, LIU Mei, et al. Intelligent radar image recognition countermeasures: A review[J]. Journal of Radars, 2023, 12(4): 696–712. doi: 10.12000/JR23098.[11] SZEGEDY C, ZAREMBA W, SUTSKEVER I, et al. Intriguing properties of neural networks[C]. The 2nd International Conference on Learning Representations, Banff, Canada, 2014.[12] GOODFELLOW I J, SHLENS J, and SZEGEDY C. Explaining and harnessing adversarial examples[C]. The 3rd International Conference on Learning Representations, San Diego, CA, USA, 2015: 1050.[13] KURAKIN A, GOODFELLOW L J, and BENGIO S. Adversarial examples in the physical world[C]. The 5th International Conference on Learning Representations, Toulon, France, 2017: 99–112.[14] PAPERNOT N, MCDANIEL P, JHA S, et al. The limitations of deep learning in adversarial settings[C]. 2016 IEEE European Symposium on Security and Privacy, Saarbruecken, Germany, 2016: 372–387. doi: 10.1109/EuroSP.2016.36.[15] BRENDEL W, RAUBER J, and BETHGE M. Decision-based adversarial attacks: Reliable attacks against black-box machine learning models[C]. The 6th International Conference on Learning Representations, Vancouver, Canada, 2018.[16] CARLINI N and WAGNER D. Towards evaluating the robustness of neural networks[C]. 2017 IEEE Symposium on Security and Privacy, San Jose, CA, USA, 2017: 39–57. doi: 10.1109/SP.2017.49.[17] SU Jiawei, VARGAS D V, and SAKURAI K. One pixel attack for fooling deep neural networks[J]. IEEE Transactions on Evolutionary Computation, 2019, 23(5): 828–841. doi: 10.1109/TEVC.2019.2890858.[18] CHEN Pinyu, ZHANG Huan, SHARMA Y, et al. ZOO: Zeroth order optimization based black-box attacks to deep neural networks without training substitute models[C]. The 10th ACM Workshop on Artificial Intelligence and Security, Dallas, USA, 2017: 15–26. doi: 10.1145/3128572.3140448.[19] CHEN Jianbo, JORDAN M I, and WAINWRIGHT M J. HopSkipJumpAttack: A query-efficient decision-based attack[C]. 2020 IEEE Symposium on Security and Privacy, San Francisco, CA, USA, 2020: 1277–1294. doi: 10.1109/SP40000.2020.00045.[20] DONG Yinpeng, LIAO Fengzhou, PANG Tianyu, et al. Boosting adversarial attacks with momentum[C]. 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 2018: 9185–9193. doi: 10.1109/CVPR.2018.00957.[21] ZHAO Haojun, LIN Yun, GAO Song, et al. Evaluating and improving adversarial attacks on DNN-based modulation recognition[C]. GLOBECOM 2020–2020 IEEE Global Communications Conference, Taipei, China, 2020: 1–5. doi: 10.1109/GLOBECOM42002.2020.9322088.[22] WANG Xiaosen and HE Kun. Enhancing the transferability of adversarial attacks through variance tuning[C]. 2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition, Nashville, TN, USA, 2021: 1924–1933. doi: 10.1109/CVPR46437.2021.00196.[23] XIE Cihang, ZHANG Zhishuai, ZHOU Yuyin, et al. Improving transferability of adversarial examples with input diversity[C]. 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 2019: 2725–2734. doi: 10.1109/CVPR.2019.00284.[24] CZAJA W, FENDLEY N, PEKALA M J, et al. Adversarial examples in remote sensing[C]. The 26th ACM SIGSPATIAL International Conference on Advances in Geographic Information Systems, Seattle, USA, 2018: 408–411. doi: 10.1145/3274895.3274904.[25] CHEN Li, XU Zewei, LI Qi, et al. An empirical study of adversarial examples on remote sensing image scene classification[J]. IEEE Transactions on Geoscience and Remote Sensing, 2021, 59(9): 7419–7433. doi: 10.1109/TGRS.2021.3051641.[26] DU Chuan, HUO Chaoying, ZHANG Lei, et al. Fast C&W: A fast adversarial attack algorithm to fool SAR target recognition with deep convolutional neural networks[J]. IEEE Geoscience and Remote Sensing Letters, 2022, 19: 4010005. doi: 10.1109/LGRS.2021.3058011.[27] DU Chuan and ZHANG Lei. Adversarial attack for SAR target recognition based on UNet-generative adversarial network[J]. Remote Sensing, 2021, 13(21): 4358. doi: 10.3390/rs13214358.[28] ZHOU Junfan, SUN Hao, and KUANG Gangyao. Template-based universal adversarial perturbation for SAR target classification[C]. The 8th China High Resolution Earth Observation Conference, Singapore, Singapore, 2023: 351–360. doi: 10.1007/978-981-19-8202-6_32.[29] XIA Weijie, LIU Zhe, and LI Yi. SAR-PeGA: A generation method of adversarial examples for SAR image target recognition network[J]. IEEE Transactions on Aerospace and Electronic Systems, 2023, 59(2): 1910–1920. doi: 10.1109/TAES.2022.3206261.[30] PENG Bowen, PENG Bo, ZHOU Jie, et al. Scattering model guided adversarial examples for SAR target recognition: Attack and defense[J]. IEEE Transactions on Geoscience and Remote Sensing, 2022, 60: 5236217. doi: 10.1109/TGRS.2022.3213305.[31] HANSEN L K and SALAMON P. Neural network ensembles[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 1990, 12(10): 993–1001. doi: 10.1109/34.58871.[32] DING Jun, CHEN Bo, LIU Hongwei, et al. Convolutional neural network with data augmentation for SAR target recognition[J]. IEEE Geoscience and Remote Sensing Letters, 2016, 13(3): 364–368. doi: 10.1109/LGRS.2015.2513754.[33] LEE J S. Digital image enhancement and noise filtering by use of local statistics[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 1980, PAMI-2(2): 165–168. doi: 10.1109/TPAMI.1980.4766994.[34] ZHUANG Juntang, TANG T, DING Yifan, et al. AdaBelief optimizer: Adapting stepsizes by the belief in observed gradients[C]. The 34th International Conference on Neural Information Processing Systems, 2020: 795–806.[35] NESTEROV Y. A method for unconstrained convex minimization problem with the rate of convergence[J]. Mathematics, 1983, 269: 543–547.[36] MA J and YARATS D. Quasi-hyperbolic momentum and Adam for deep learning[C]. The 7th International Conference on Learning Representations, New Orleans, LA, USA, 2019: 1–38.[37] KEYDEL E R, LEE S W, and MOORE J T. MSTAR extended operating conditions: A tutorial[C]. SPIE 2757, Algorithms for Synthetic Aperture Radar Imagery III, Orlando, USA, 1996: 228–242. doi: 10.1117/12.242059.[38] HOU Xiyue, AO Wei, SONG Qian, et al. FUSAR-Ship: Building a high-resolution SAR-AIS matchup dataset of Gaofen-3 for ship detection and recognition[J]. Science China Information Sciences, 2020, 63(4): 140303. doi: 10.1007/s11432-019-2772-5.[39] KRIZHEVSKY A, SUTSKEVER I, and HINTON G E. ImageNet classification with deep convolutional neural networks[C]. The 25th International Conference on Neural Information Processing Systems, Lake Tahoe, USA, 2012: 1106–1114.[40] SIMONYAN K and ZISSERMAN A. Very deep convolutional networks for large-scale image recognition[C]. The 3rd International Conference on Learning Representations, San Diego, CA, USA, 2015.[41] HE Kaiming, ZHANG Xiangyu, REN Shaoqing, et al. Deep residual learning for image recognition[C]. IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 2016: 770–778. doi: 10.1109/CVPR.2016.90.[42] SZEGEDY C, VANHOUCKE V, IOFFE S, et al. Rethinking the inception architecture for computer vision[C]. 2016 IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 2016: 2818–2826. doi: 10.1109/CVPR.2016.308.[43] HOWARD A G, ZHU Menglong, CHEN Bo, et al. MobileNets: Efficient convolutional neural networks for mobile vision applications[EB/OL]. https://arxiv.org/abs/1704.04861, 2017.[44] IANDOLA F N, HAN Song, MOSKEWICZ M W, et al. SqueezeNet: AlexNet-level accuracy with 50x fewer parameters and <0.5MB model size[EB/OL]. https://arxiv.org/abs/1602.07360, 2016.[45] WANG Wenhai, XIE Enze, LI Xiang, et al. Pyramid vision transformer: A versatile backbone for dense prediction without convolutions[C]. 2021 IEEE/CVF International Conference on Computer Vision, Montreal, QC, Canada, 2021: 548–558. doi: 10.1109/ICCV48922.2021.00061.[46] MEHTA S and RASTEGARI M. MobileViT: Light-weight, general-purpose, and mobile-friendly vision transformer[C]. The Tenth International Conference on Learning Representations, 2022.[47] KINGMA D P and BA J. Adam: A method for stochastic optimization[C]. The 3rd International Conference on Learning Representations, San Diego, CA, USA, 2015: 1–15.[48] WANG Zhou, BOVIK A C, SHEIKH H R, et al. Image quality assessment: From error visibility to structural similarity[J]. IEEE Transactions on Image Processing, 2004, 13(4): 600–612. doi: 10.1109/TIP.2003.819861. -
Proportional views

- Publishing Ethics
- Journal Insights
- Abstracting & Indexing
- Peer Review Policies
- Guide for Authors
- Conference
- ISSN 2095-283X (Print)ISSN 2097-339X (Online)
- CN 10-1030/TN
- CODEN LXEUAO
About Journal
- Sponsor: China Radio Detection and Ranging Industry Association (CRIA)
- Phone: 010-58887062
- Email:radars@aircas.ac.cn
- Publisher: Leida Xuebao Bianjibu (Editorial office of the Journal of Radars)
Contacts Us

京ICP备20021838号-14
Supported by: Beijing Renhe Information Technology Co. Ltd

Export File
Citation
Format
Content
 DownLoad:
DownLoad:
- Figure 1. Schematic diagram of the TBAA algorithm
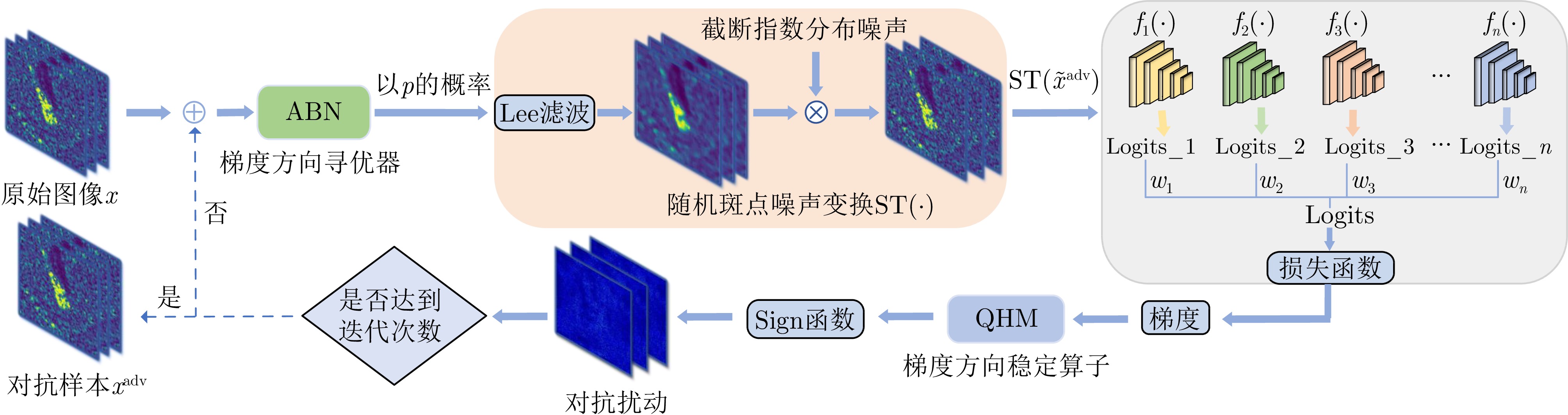
- Figure 2. Transferability of adversarial examples
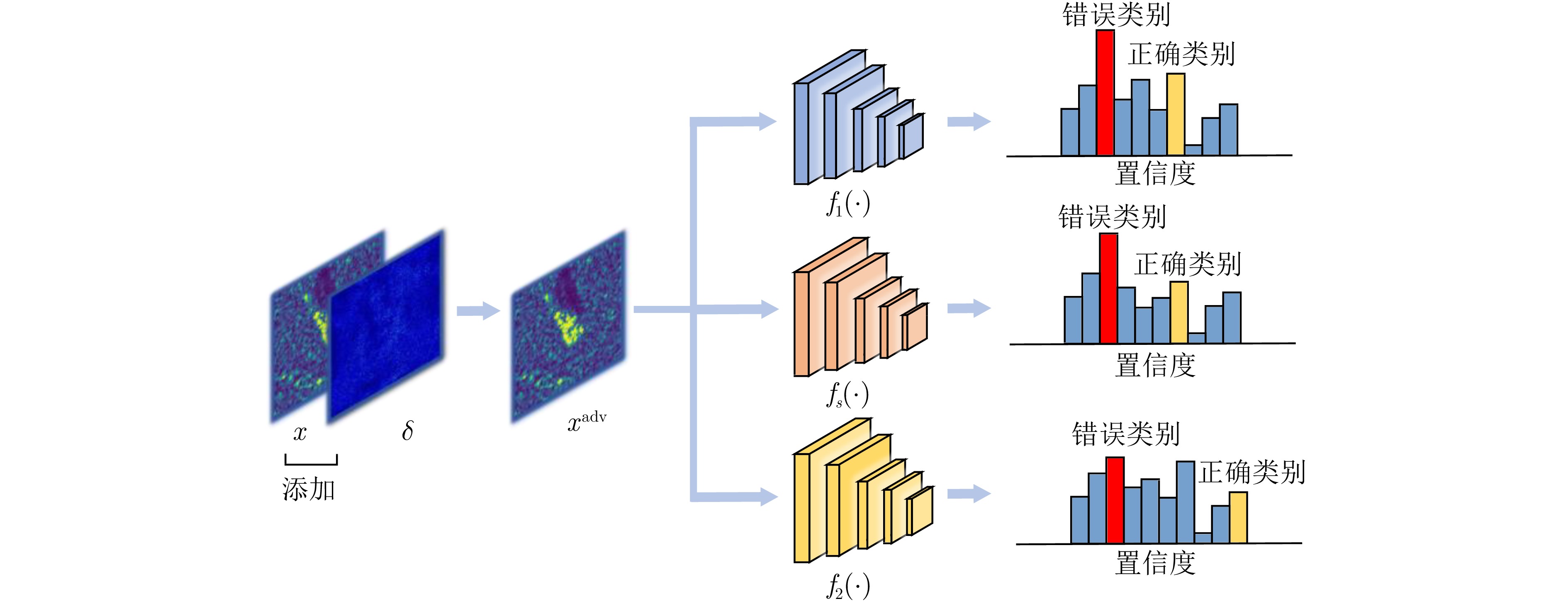
- Figure 3. SAR images of the MSTAR dataset
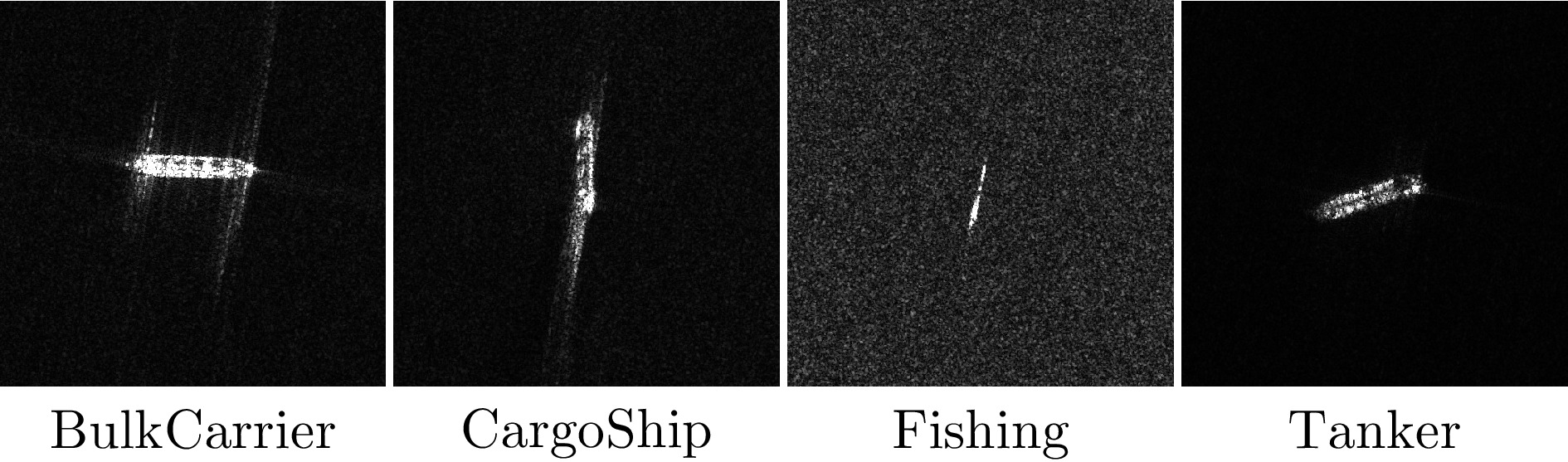
- Figure 4. SAR images of the FUSAR-Ship dataset
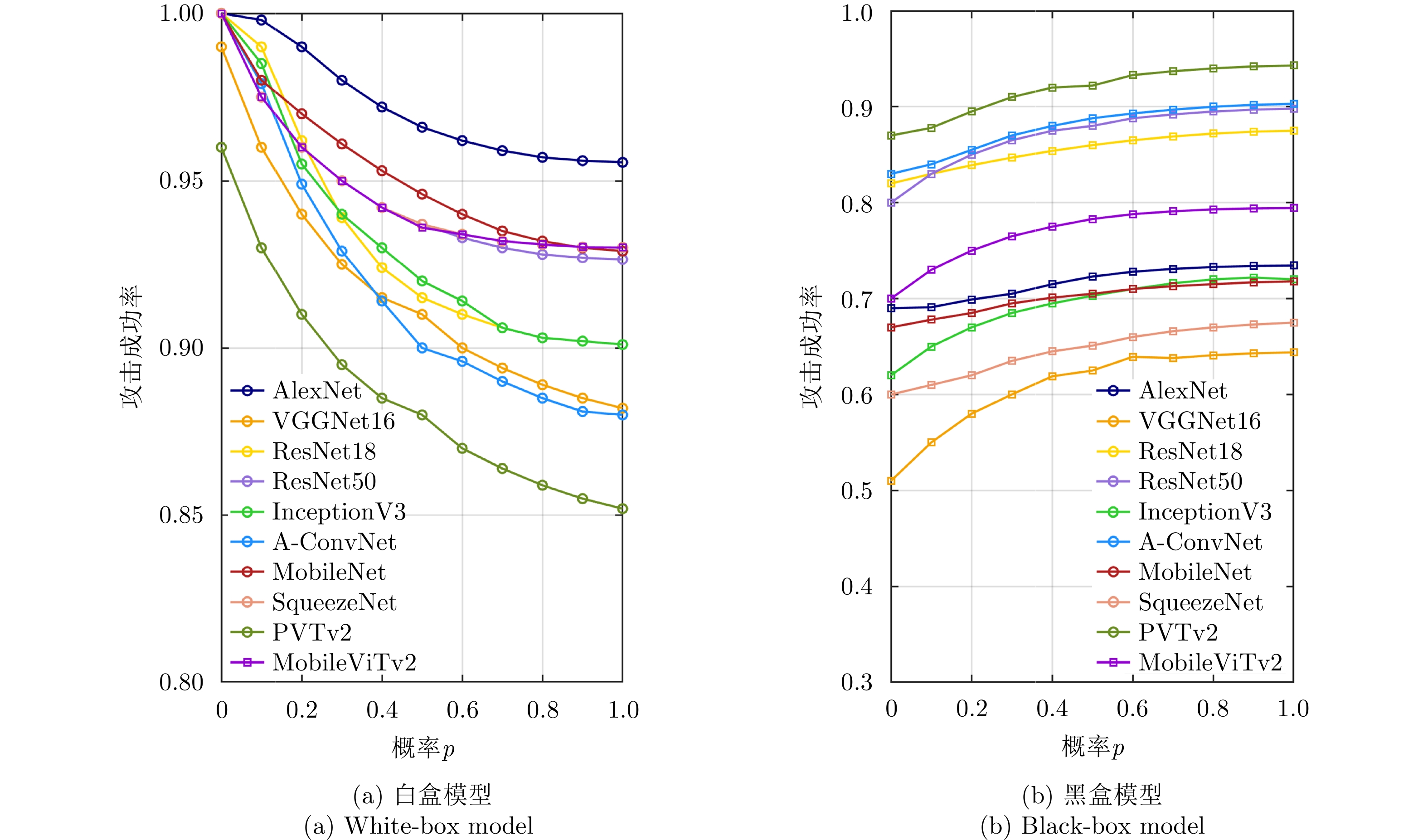
- Figure 5. The attack success rate changes with probability p
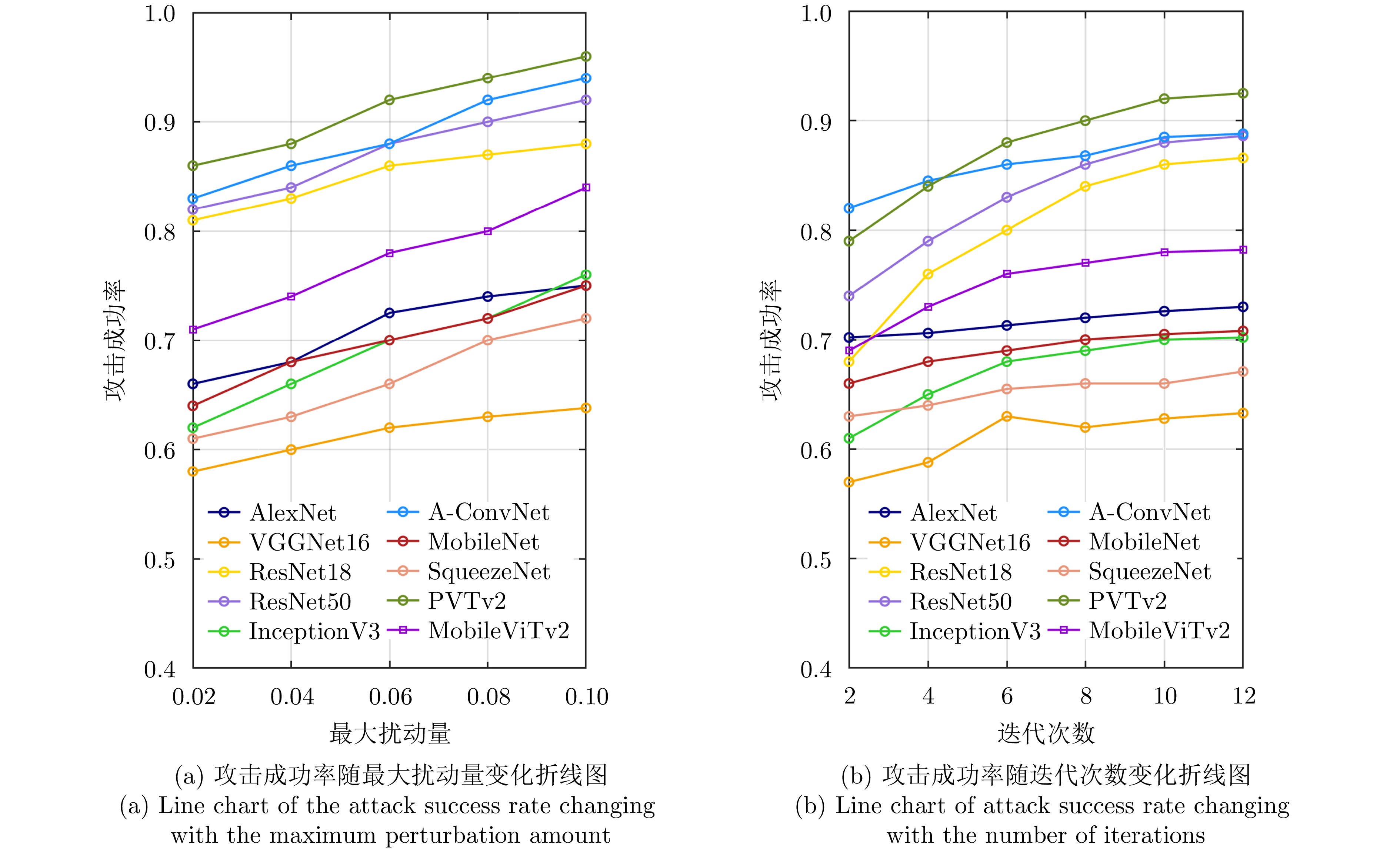
- Figure 6. Line chart of attack success rate change under black-box model
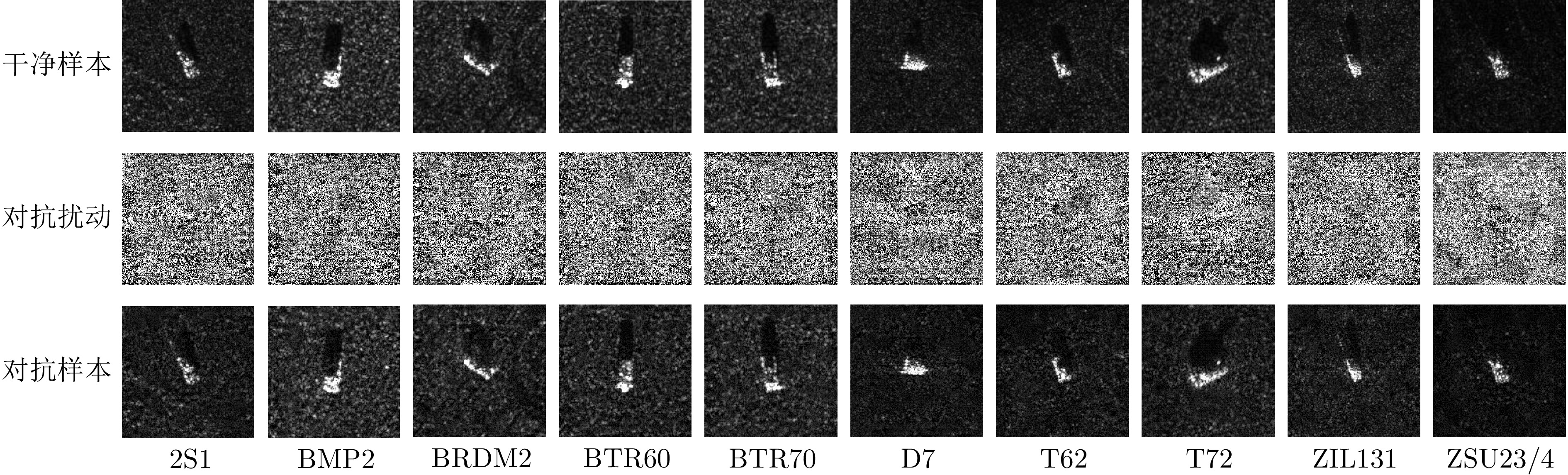
- Figure 7. TBAA clean examples, adversarial perturbations and adversarial examples display