
 Submit Manuscript
Submit Manuscript Peer Review
Peer Review Editor Work
Editor Work- Home
- Articles & Issues
-
Data
- Dataset of Radar Detecting Sea
- SAR Dataset
- SARGroundObjectsTypes
- SARMV3D
- AIRSAT Constellation SAR Land Cover Classification Dataset
- 3DRIED
- UWB-HA4D
- LLS-LFMCWR
- FAIR-CSAR
- MSAR
- SDD-SAR
- FUSAR
- SpaceborneSAR3Dimaging
- Sea-land Segmentation
- SAR Multi-domain Ship Detection Dataset
- SAR-Airport
- Hilly and mountainous farmland time-series SAR and ground quadrat dataset
- SAR images for interference detection and suppression
- HP-SAR Evaluation & Analytical Dataset
- GDHuiYan-ATRNet
- Multi-System Maritime Low Observable Target Dataset
- DatasetinthePaper
- DatasetintheCompetition
- Report
- Course
- About
- Publish
- Editorial Board
- Chinese
| Citation: | YOU Ruixi, QIAN Yutong, and XU Feng. Preliminary research on the effectiveness of Gestalt perceptual principles in SAR images[J]. Journal of Radars, 2024, 13(2): 345–358. doi: 10.12000/JR23187

|
Preliminary Research on the Effectiveness of Gestalt Perceptual Principles in SAR Images
DOI: 10.12000/JR23187 CSTR: 32380.14.JR23187
More Information-
Abstract
Synthetic Aperture Radar (SAR) images are an important data source in microwave vision research; however, computer vision cannot interpret these images effectively based on optical perceptual principles. Therefore, microwave vision, which draws inspiration from human visual perception principles and combines computer vision techniques with electromagnetic physical principles, has become an important research direction in microwave remote sensing. Exploring the cognitive basis for microwave vision is crucial for improving the theoretical system of microwave vision. Therefore, as a preliminary attempt to enhance the theoretical understanding of microwave vision, this paper examines the effectiveness of optical perceptual principles for microwave vision. As a classical visual theory, Gestalt perceptual principles are commonly used for describing the perceptual principles of the human visual system for the external optical world and are a cognitive theoretical foundation of computer vision. In this context, this paper uses SAR images as the research object, focuses on the design process of cognitive psychology experiments, and preliminarily studies the effectiveness of Gestalt perceptual principles for SAR images, including the principles of perceptual grouping and perceptual invariance, exploring the cognitive basis of microwave vision. The experimental results indicate that the Gestalt perceptual principles cannot be directly applied to the algorithm design for SAR images, and the knowledge concepts and visual principles derived from the optical world using the human visual system do not perform well in SAR images. In the future, it will be necessary to summarize the corresponding visual cognitive principles based on the characteristics of microwave images, such as SAR images. -

-
References
[1] 魏钟铨. 合成孔径雷达卫星[M]. 北京: 科学出版社, 2001.WEI Zhongquan. Synthetic Aperture Radar Satellite[M]. Beijing: Science Press, 2001.[2] 保铮, 邢孟道, 王彤. 雷达成像技术[M]. 北京: 电子工业出版社, 2005.BAO Zheng, XING Mengdao, and WANG Tong. Radar Imaging Technology[M]. Beijing: Publishing House of Electronics Industry, 2005.[3] 王磊. 深度学习框架下的极化SAR影像信息表达与分类研究[D]. [博士论文], 武汉大学, 2020.WANG Lei. Polarimetric SAR image information representation and classification based on deep learning[D]. [Ph.D. dissertation], Wuhan University, 2020.[4] 徐丰, 金亚秋. 从物理智能到微波视觉[J]. 科技导报, 2018, 36(10): 30–44. doi: 10.3981/j.issn.1000-7857.2018.10.004.XU Feng and JIN Yaqiu. From the emergence of intelligent science to the research of microwave vision[J]. Science & Technology Review, 2018, 36(10): 30–44. doi: 10.3981/j.issn.1000-7857.2018.10.004.[5] 金亚秋. 多模式遥感智能信息与目标识别: 微波视觉的物理智能[J]. 雷达学报, 2019, 8(6): 710–716. doi: 10.12000/JR19083.JIN Yaqiu. Multimode remote sensing intelligent information and target recognition: Physical intelligence of microwave vision[J]. Journal of Radars, 2019, 8(6): 710–716. doi: 10.12000/JR19083.[6] 丁赤飚, 仇晓兰, 徐丰等. 合成孔径雷达三维成像—从层析、阵列到微波视觉[J]. 雷达学报, 2019, 8(6): 693–709. doi: 10.12000/JR19090.DING Chibiao, QIU Xiaolan, XU Feng, et al. Synthetic aperture radar three-dimensional imaging—from TomoSAR and array InSAR to microwave vision[J]. Journal of Radars, 2019, 8(6): 693–709. doi: 10.12000/JR19090.[7] 金亚秋, 徐丰. 面向未来空间电磁信息技术的综合分析[J]. 中国科学基金, 2021, 35(5): 688–693. doi: 10.16262/j.cnki.1000-8217.2021.05.003.JIN Yaqiu and XU Feng. General analysis for future spatial electromagnetic information technologies[J]. Bulletin of National Natural Science Foundation of China, 2021, 35(5): 688–693. doi: 10.16262/j.cnki.1000-8217.2021.05.003.[8] CHEN Sizhe, WANG Haipeng, XU Feng, et al. Target classification using the deep convolutional networks for SAR images[J]. IEEE Transactions on Geoscience and Remote Sensing, 2016, 54(8): 4806–4817. doi: 10.1109/TGRS.2016.2551720.[9] 仇晓兰, 焦泽坤, 杨振礼, 等. 微波视觉三维SAR关键技术及实验系统初步进展[J]. 雷达学报, 2022, 11(1): 1–19. doi: 10.12000/JR22027.QIU Xiaolan, JIAO Zekun, YANG Zhenli, et al. Key technology and preliminary progress of microwave vision 3D SAR experimental system[J]. Journal of Radars, 2022, 11(1): 1–19. doi: 10.12000/JR22027.[10] COLE S and BALCETIS E. Motivated perception for self-regulation: How visual experience serves and is served by goals[J]. Advances in Experimental Social Psychology, 2021, 64: 129–186. doi: 10.1016/bs.aesp.2021.04.003.[11] 乐国安, 韩振华. 认知心理学[M]. 天津: 南开大学出版社, 2011: 36–37.LE Guoan and HAN Zhenhua. Cognitive Psychology[M]. Tianjin: Nankai University Press, 2011: 36–37.[12] WAGEMANS J, ELDER J H, KUBOVY M, et al. A century of Gestalt psychology in visual perception: I. Perceptual grouping and figure–ground organization[J]. Psychological Bulletin, 2012, 138(6): 1172–1217. doi: 10.1037/a0029333.[13] WAGEMANS J, FELDMAN J, GEPSHTEIN S, et al. A century of Gestalt psychology in visual perception: II. Conceptual and theoretical foundations[J]. Psychological Bulletin, 2012, 138(6): 1218–1252. doi: 10.1037/a0029334.[14] STERNBERG R J. Cognitive Psychology[M]. Fort Worth, USA: Harcourt Brace College Publishers, 1996.[15] MARR D. Vision: A Computational Investigation into the Human Representation and Processing of Visual Information[M]. Cambridge, USA: MIT Press, 2010.[16] CHANG D, NESBITT K V, and WILKINS K. The Gestalt principles of similarity and proximity apply to both the haptic and visual grouping of elements[C]. The Eight Australasian Conference on User Interface, Ballarat, Australia, 2007: 79–86.[17] WERTHEIMER M. Untersuchungen zur Lehre von der Gestalt[J]. Gestalt Theory, 2017, 39(1): 79–89. doi: 10.1515/gth-2017-0007.[18] ELLIS W D. A Source Book of Gestalt Psychology[M]. London, UK: Kegan Paul, Trench, Trubner & Company, 1938: 71–88.[19] KOFFKA K. Principles of Gestalt Psychology[M]. New York: Harcourt, Brace, 1935.[20] ATTNEAVE F. Some informational aspects of visual perception[J]. Psychological Review, 1954, 61(3): 183–193. doi: 10.1037/H0054663.[21] SIGMAN M, CECCHI G A, GILBERT C D, et al. On a common circle: Natural scenes and Gestalt rules[J]. Proceedings of the National Academy of Sciences, 2001, 98(4): 1935–1940. doi: 10.1073/pnas.98.4.1935.[22] BLAIS C, ARGUIN M, and MARLEAU I. Orientation invariance in visual shape perception[J]. Journal of Vision, 2009, 9(2): 14. doi: 10.1167/9.2.14.[23] BUCCELLA A. The problem of perceptual invariance[J]. Synthese, 2021, 199(5/6): 13883–13905. doi: 10.1007/s11229-021-03402-2.[24] MAN K, KAPLAN J T, DAMASIO A, et al. Sight and sound converge to form modality-invariant representations in temporoparietal cortex[J]. The Journal of Neuroscience, 2012, 32(47): 16629–16636. doi: 10.1523/JNEUROSCI.2342-12.2012.[25] ELDER J H and GOLDBERG R M. Ecological statistics of Gestalt laws for the perceptual organization of contours[J]. Journal of Vision, 2002, 2(4): 5. doi: 10.1167/2.4.5.[26] DESOLNEUX A, MOISAN L, and MOREL J M. Gestalt Theory and Computer Vision[M]. CARSETTI A. Seeing, Thinking and Knowing. Dordrecht: Springer, 2004: 71–101. doi: 10.1007/1-4020-2081-3_4.[27] QI Yonggang, SONG Yizhe, XIANG Tao, et al. Making better use of edges via perceptual grouping[C]. 2015 IEEE Conference on Computer Vision and Pattern Recognition, Boston, USA, 2015: 1856–1865. doi: 10.1109/CVPR.2015.7298795.[28] YAN Yijun, REN Jinchang, SUN Genyun, et al. Unsupervised image saliency detection with Gestalt-laws guided optimization and visual attention based refinement[J]. Pattern Recognition, 2018, 79: 65–78. doi: 10.1016/J.PATCOG.2018.02.004.[29] FANG Yuming, ZHANG Xiaoqiang, YUAN Feiniu, et al. Video saliency detection by gestalt theory[J]. Pattern Recognition, 2019, 96: 106987. doi: 10.1016/J.PATCOG.2019.106987.[30] ZHU Shanshan and YUNG N H C. Sub-scene segmentation using constraints based on Gestalt principles[J]. Journal of Visual Communication and Image Representation, 2014, 25(5): 994–1005. doi: 10.1016/j.jvcir.2014.02.017.[31] YU Hang, ZHANG Xiangrong, WANG Shuang, et al. Context-based hierarchical unequal merging for SAR image segmentation[J]. IEEE Transactions on Geoscience and Remote Sensing, 2013, 51(2): 995–1009. doi: 10.1109/TGRS.2012.2203604.[32] SOERGEL U, MICHAELSEN E, THIELE A, et al. Stereo analysis of high-resolution SAR images for building height estimation in cases of orthogonal aspect directions[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2009, 64(5): 490–500. doi: 10.1016/J.ISPRSJPRS.2008.10.007.[33] MICHAELSEN E, SOERGEL U, and THOENNESSEN U. Perceptual grouping for automatic detection of man-made structures in high-resolution SAR data[J]. Pattern Recognition Letters, 2006, 27(4): 218–225. doi: 10.1016/j.patrec.2005.08.002.[34] MICHAELSEN E, STILLA U, SOERGEL U, et al. Extraction of building polygons from SAR images: Grouping and decision-level in the GESTALT system[J]. Pattern Recognition Letters, 2010, 31(10): 1071–1076. doi: 10.1016/j.patrec.2009.10.004.[35] FAUL F, ERDFELDER E, BUCHNER A, et al. Statistical power analyses using G*Power 3.1: Tests for correlation and regression analyses[J]. Behavior Research Methods, 2009, 41(4): 1149–1160. doi: 10.3758/BRM.41.4.1149.[36] PALMER S E and BROOKS J L. Edge-region grouping in figure-ground organization and depth perception[J]. Journal of Experimental Psychology : Human Perception and Performance , 2008, 34(6): 1353–1371. doi: 10.1037/a0012729.[37] SAWYER S F. Analysis of variance: The fundamental concepts[J]. Journal of Manual & Manipulative Therapy, 2009, 17(2): 27E–38E. doi: 10.1179/jmt.2009.17.2.27E.[38] DRIVER J and BAYLIS G C. Edge-assignment and figure-ground segmentation in short-term visual matching[J]. Cognitive Psychology, 1996, 31(3): 248–306. doi: 10.1006/cogp.1996.0018. -
Proportional views

- Publishing Ethics
- Journal Insights
- Abstracting & Indexing
- Peer Review Policies
- Guide for Authors
- Conference
- ISSN 2095-283X (Print)ISSN 2097-339X (Online)
- CN 10-1030/TN
- CODEN LXEUAO
About Journal
- Sponsor: China Radio Detection and Ranging Industry Association (CRIA)
- Phone: 010-58887062
- Email:radars@aircas.ac.cn
- Publisher: Leida Xuebao Bianjibu (Editorial office of the Journal of Radars)
Contacts Us

京ICP备20021838号-14
Supported by: Beijing Renhe Information Technology Co. Ltd

Export File
Citation
Format
Content
 DownLoad:
DownLoad:


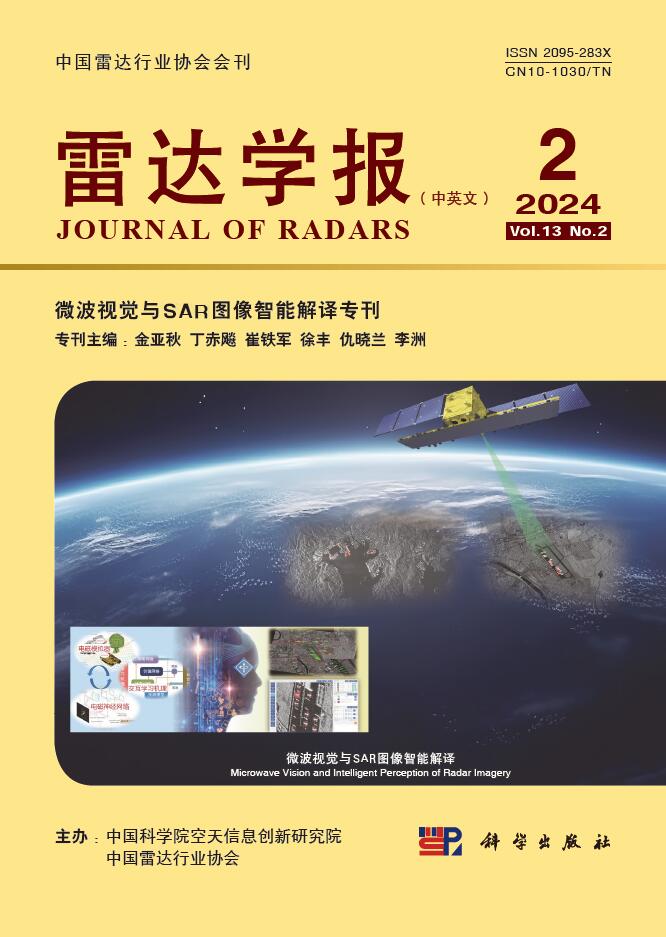
- Figure 1. Flow chart of experiment 1 interactive interface
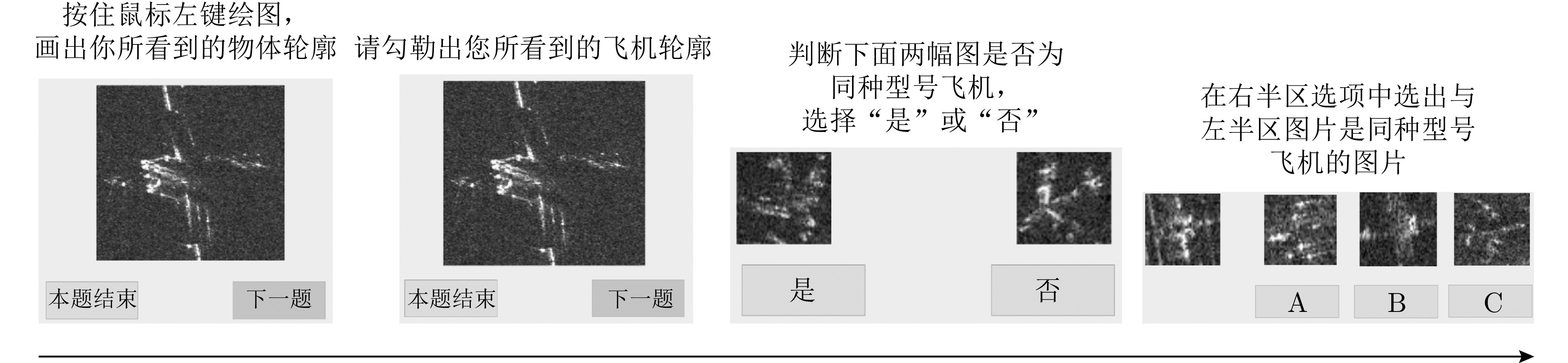
- Figure 2. Examples of materials in different experimental condition groups
- Figure 3. Examples of invalid samples
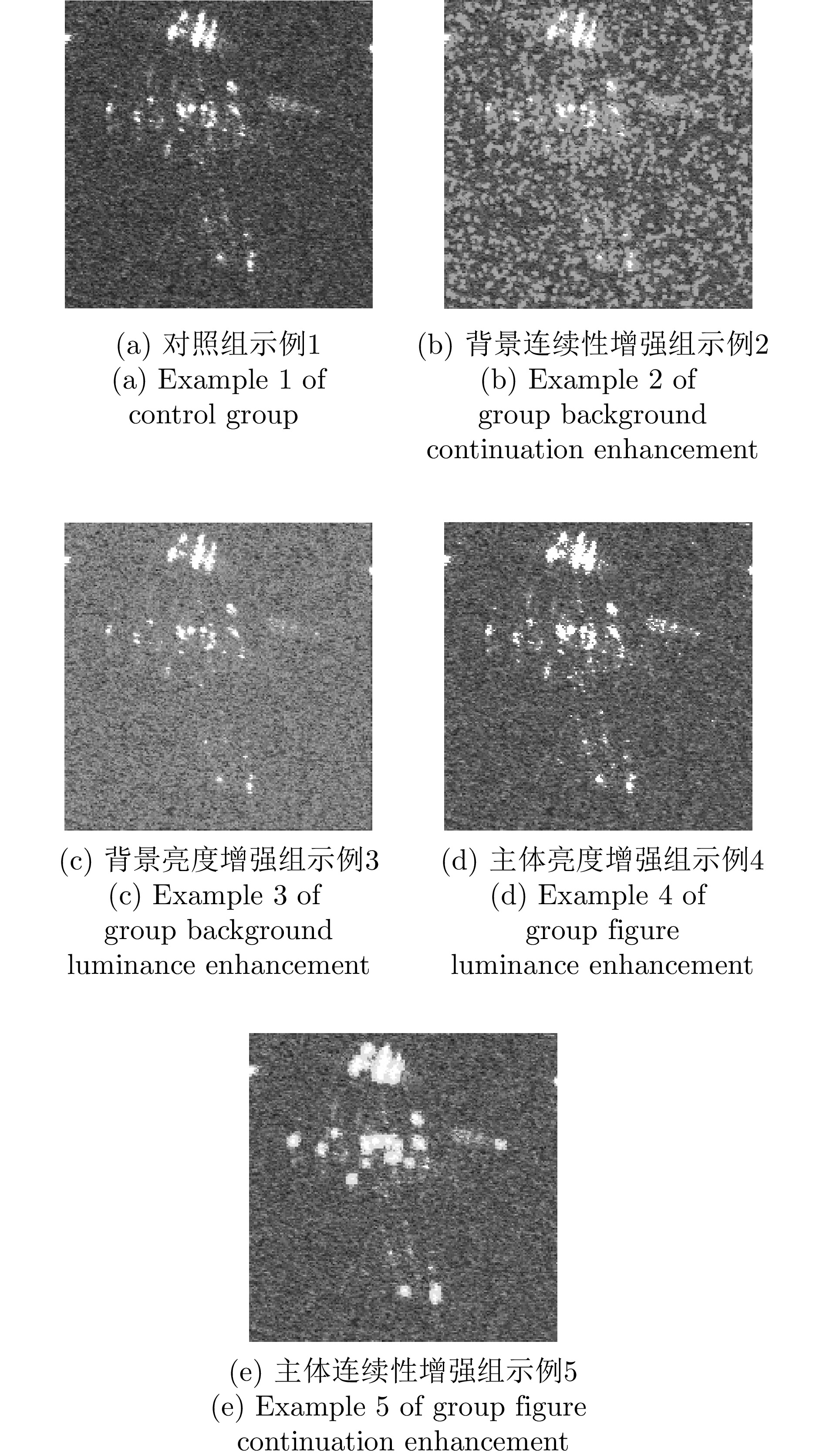
- Figure 4. Examples of participant responses
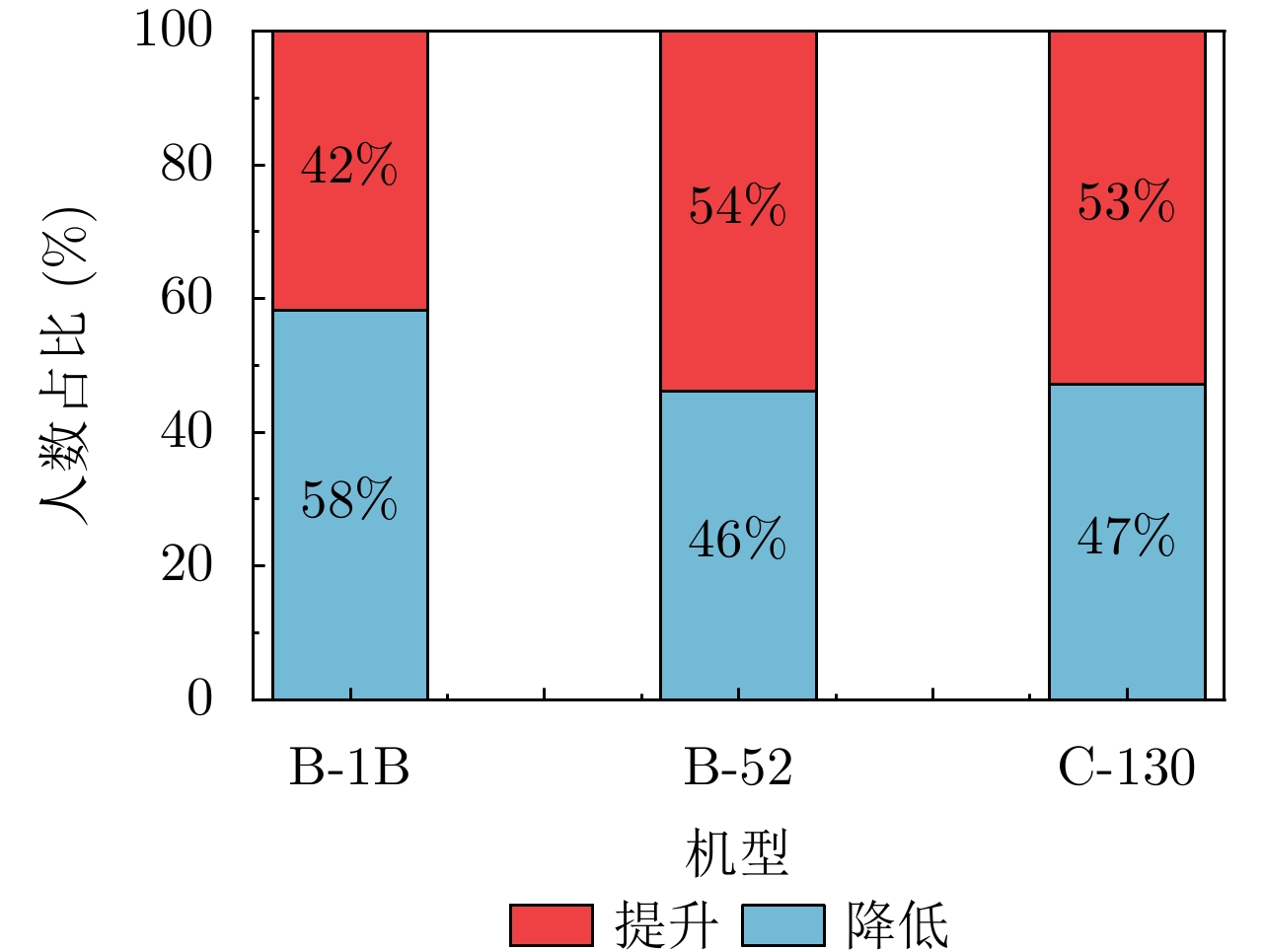
- Figure 5. Proportion of IoU result changes in drawing questions with and without informing the participants of the image contents
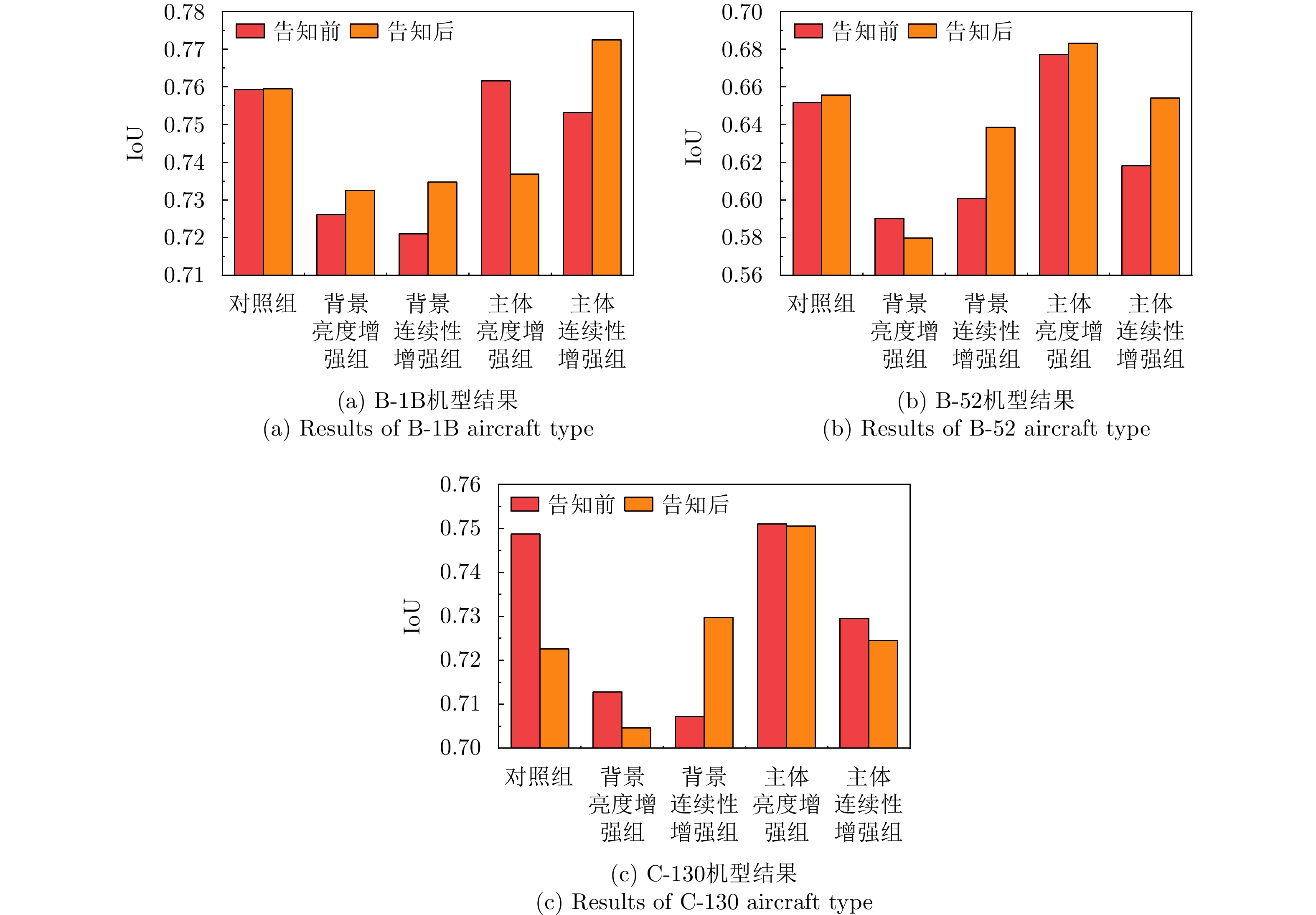
- Figure 6. Comparison of average IoU results of drawing questions before and after informing the participants of the image contents
- Figure 7. Diagram of the modeling process
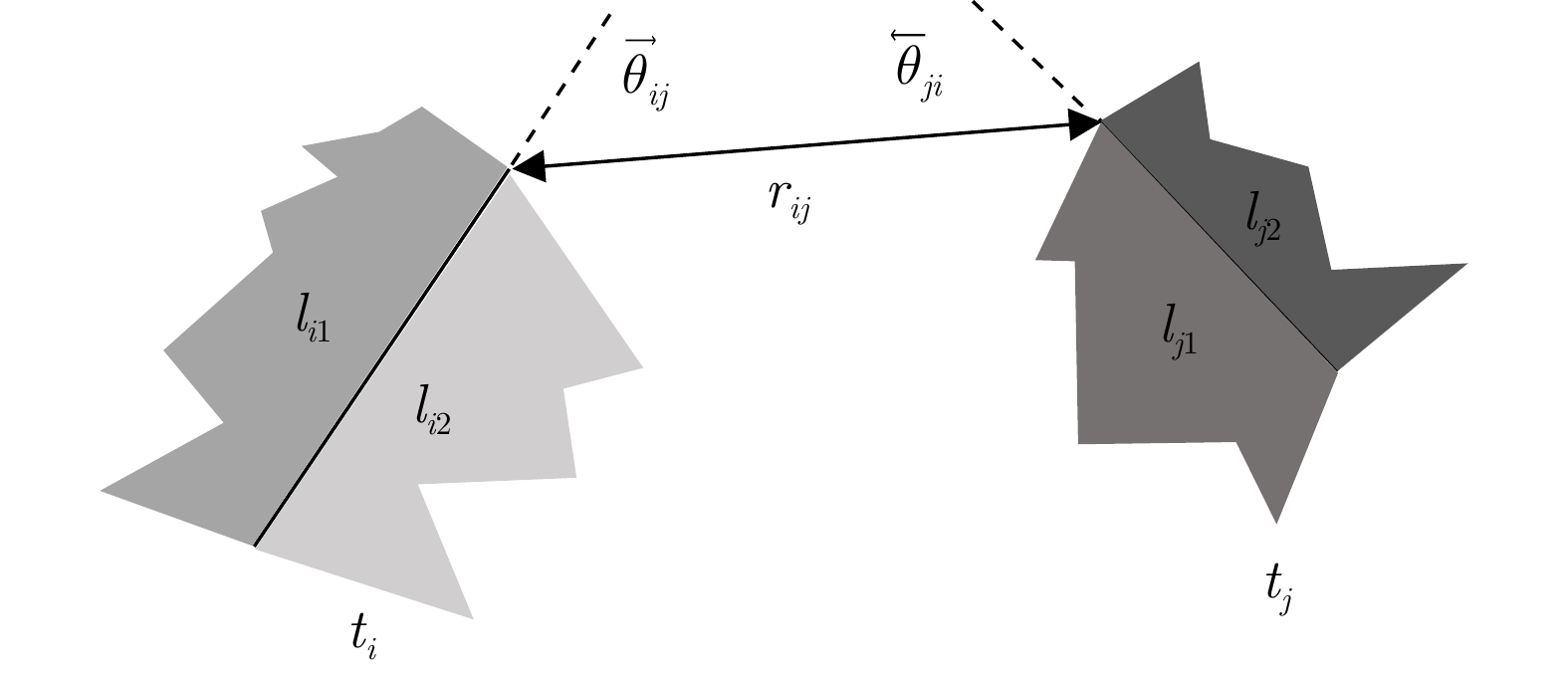
- Figure 8. Diagram of attribute features of local tangent pairs
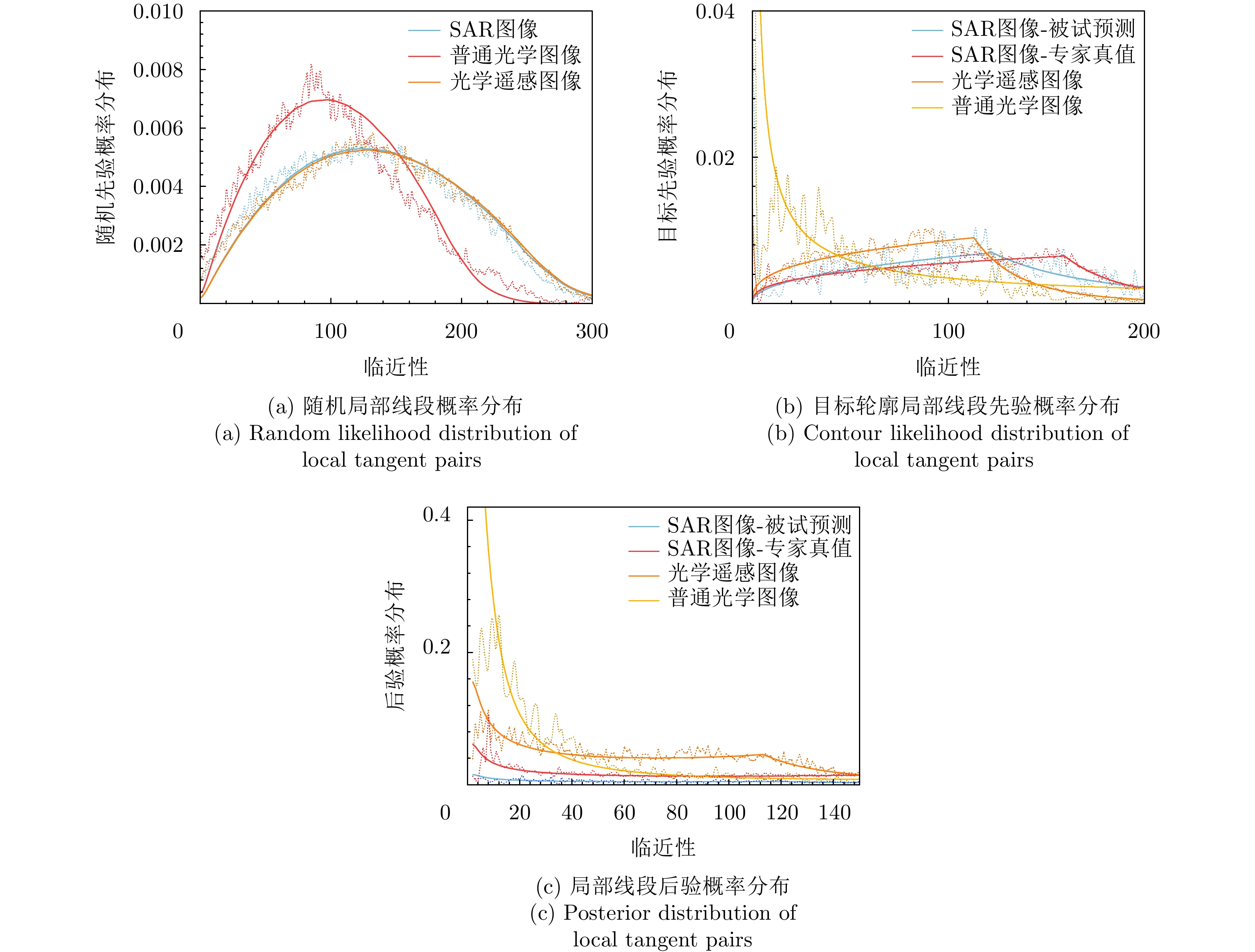
- Figure 9. Probability distribution results of the proximity Gestalt principle (dotted lines representing measured data, solid lines representing fitting results)
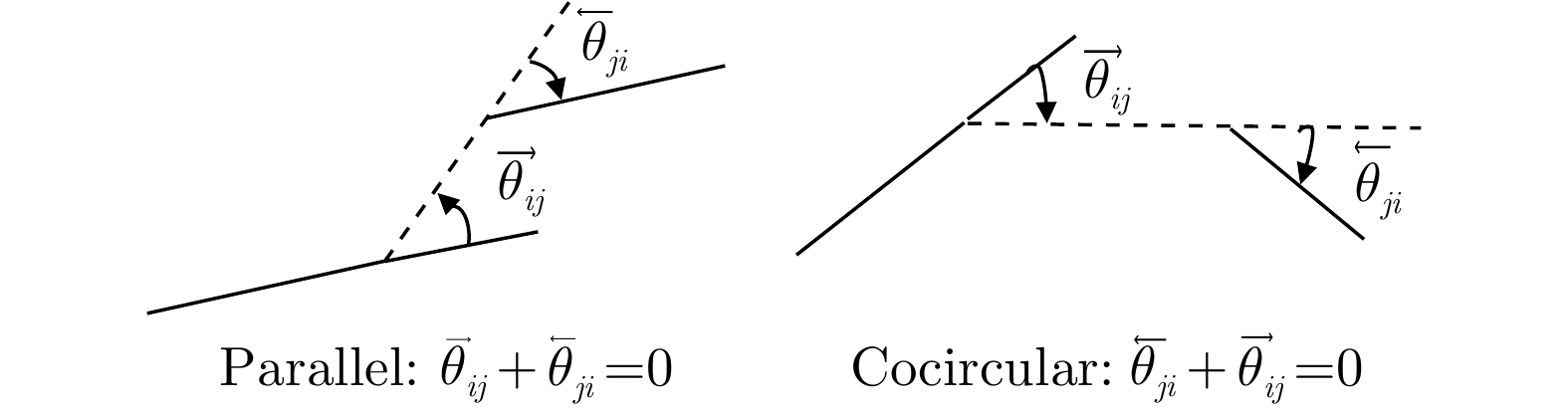
- Figure 10. Diagram of corresponding variables of the continuation Gestalt principles
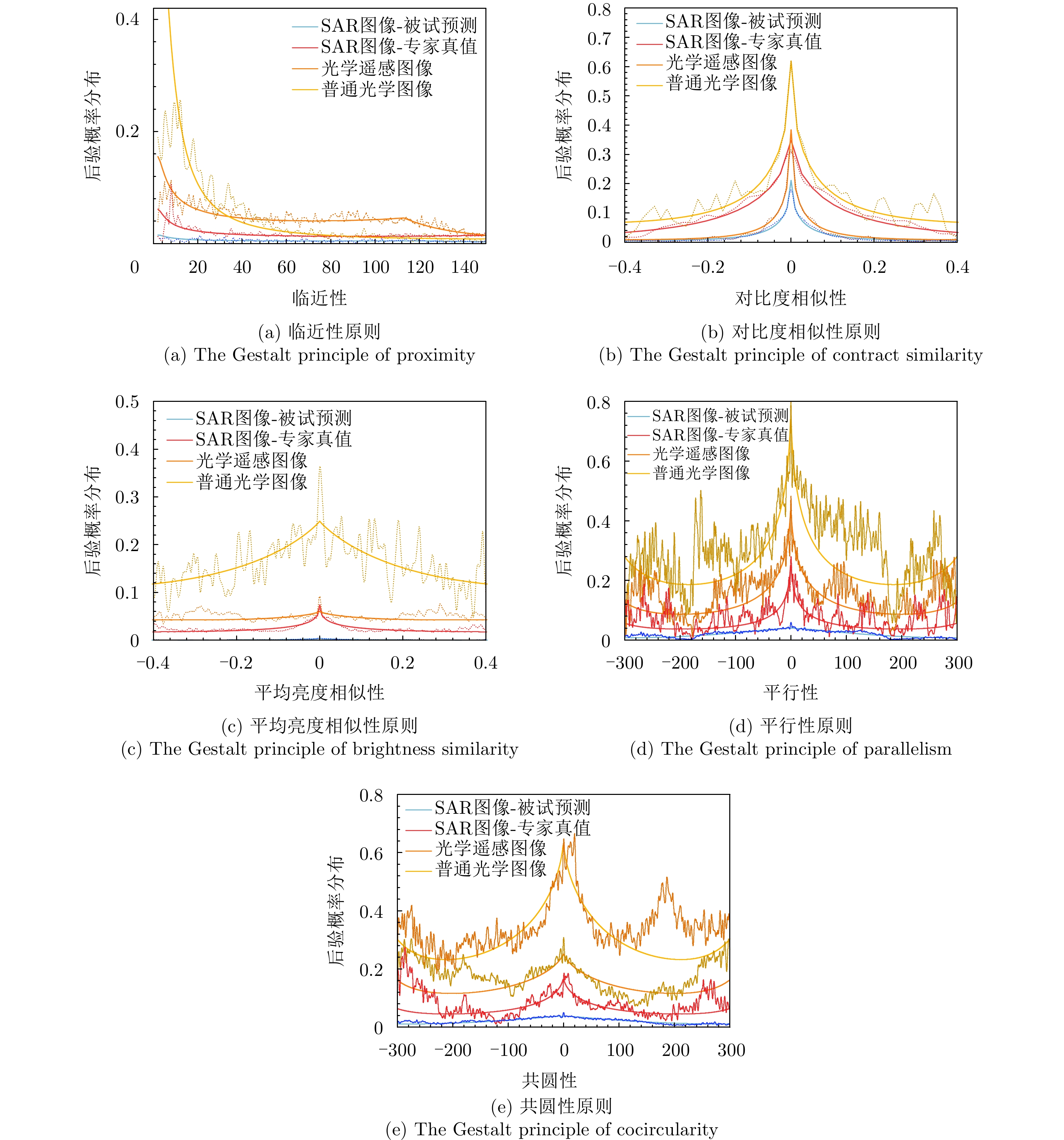
- Figure 11. Data and models of posterior distributions of different Gestalt principles (dotted lines representing measured data, solid lines representing fitting results)