
 Submit Manuscript
Submit Manuscript Peer Review
Peer Review Editor Work
Editor Work- Home
- Articles & Issues
-
Data
- Dataset of Radar Detecting Sea
- SAR Dataset
- SARGroundObjectsTypes
- SARMV3D
- AIRSAT Constellation SAR Land Cover Classification Dataset
- 3DRIED
- UWB-HA4D
- LLS-LFMCWR
- FAIR-CSAR
- MSAR
- SDD-SAR
- FUSAR
- SpaceborneSAR3Dimaging
- Sea-land Segmentation
- SAR Multi-domain Ship Detection Dataset
- SAR-Airport
- Hilly and mountainous farmland time-series SAR and ground quadrat dataset
- SAR images for interference detection and suppression
- HP-SAR Evaluation & Analytical Dataset
- GDHuiYan-ATRNet
- Multi-System Maritime Low Observable Target Dataset
- DatasetinthePaper
- DatasetintheCompetition
- Report
- Course
- About
- Publish
- Editorial Board
- Chinese

| Citation: | QI Cheng, XIE Junwei, ZHANG Haowei, et al. Element configuration optimization of hybrid distributed PA-MIMO radar system based on target detection[J]. Journal of Radars, 2023, 12(3): 576–589. doi: 10.12000/JR22159

|
Element Configuration Optimization of Hybrid Distributed PA-MIMO Radar System Based on Target Detection
DOI: 10.12000/JR22159 CSTR: 32380.14.JR22159
More Information-
Abstract
This paper establishes a hybrid distributed Phased-Array Multiple-Input Multiple-Output (PA-MIMO) radar system model, which combines coherent processing gain and spatial diversity gain to synergistically improve the target detection performance. We derive a Likelihood Ratio Test (LRT) detector based on the Neyman-Pearson (NP) criterion for the hybrid distributed PA-MIMO radar system. The coherent processing gain and spatial diversity gain are jointly optimized by implementing subarray-level and array element–level optimal configurations at the transceiver and transmitter ends. Moreover, a Quantum Particle Swarm Optimization-based Stochastic Rounding (SR-QPSO) algorithm is proposed for the integer programming-based configuration model. This algorithm ensures that the optimal array-element configuration strategy is obtained with less iteration and achieves the joint optimization of subarray and array-element levels. Finally, simulations verify that the proposed optimal configuration offers substantial improvements compared to other typical radar systems, with a detection probability of 0.98 and an effective range of 1166.3 km, as well as a considerably improved detection performance. -

-
References
[1] MALANOWSKI M and KULPA K. Detection of moving targets with continuous-wave noise radar: Theory and measurements[J]. IEEE Transactions on Geoscience and Remote Sensing, 2012, 50(9): 3502–3509. doi: 10.1109/TGRS.2011.2181521[2] ZHU Zhenghan, KAY S, and RAGHAVAN R S. Information-theoretic optimal radar waveform design[J]. IEEE Signal Processing Letters, 2017, 24(3): 274–278. doi: 10.1109/LSP.2017.2655879[3] YAN Junkun, LIU Hongwei, PU Wenqiang, et al. Joint beam selection and power allocation for multiple target tracking in netted colocated MIMO radar system[J]. IEEE Transactions on Signal Processing, 2016, 64(24): 6417–6427. doi: 10.1109/TSP.2016.2607147[4] XU Luzhou, LI Jian, and STOICA P. Target detection and parameter estimation for MIMO radar systems[J]. IEEE Transactions on Aerospace and Electronic Systems, 2008, 44(3): 927–939. doi: 10.1109/TAES.2008.4655353[5] SHI Chenguang, WANG Yijie, SALOUS S, et al. Joint transmit resource management and waveform selection strategy for target tracking in distributed phased array radar network[J]. IEEE Transactions on Aerospace and Electronic Systems, 2022, 58(4): 2762–2778. doi: 10.1109/TAES.2021.3138869[6] ZHANG Haowei, LIU Weijian, XIE Junwei, et al. Joint subarray selection and power allocation for cognitive target tracking in large-scale MIMO radar networks[J]. IEEE Systems Journal, 2020, 14(2): 2569–2580. doi: 10.1109/JSYST.2019.2960401[7] YAN Junkun, ZHANG Peng, DAI Jinhui, et al. Target capacity based simultaneous multibeam power allocation scheme for multiple target tracking application[J]. Signal Processing, 2021, 178: 107794. doi: 10.1016/j.sigpro.2020.107794[8] ZHANG Haowei, ZHOU Hao, ZONG Binfeng, et al. A fast power allocation strategy for multibeam tracking multiple targets in clutter[J]. IEEE Systems Journal, 2022, 16(1): 1249–1257. doi: 10.1109/JSYST.2021.3059257[9] YAN Junkun, DAI Jinhui, PU Wenqiang, et al. Target capacity based resource optimization for multiple target tracking in radar network[J]. IEEE Transactions on Signal Processing, 2021, 69: 2410–2421. doi: 10.1109/TSP.2021.3071173[10] YAN Junkun, LIU Hongwei, JIU Bo, et al. Simultaneous multibeam resource allocation scheme for multiple target tracking[J]. IEEE Transactions on Signal Processing, 2015, 63(12): 3110–3122. doi: 10.1109/TSP.2015.2417504[11] 张大琳, 易伟, 孔令讲. 面向组网雷达干扰任务的多干扰机资源联合优化分配方法[J]. 雷达学报, 2021, 10(4): 595–606. doi: 10.12000/JR21071ZHANG Dalin, YI Wei, and KONG Lingjiang. Optimal joint allocation of multijammer resources for jamming netted radar system[J]. Journal of Radars, 2021, 10(4): 595–606. doi: 10.12000/JR21071[12] FISHLER E, HAIMOVICH A, BLUM R, et al. MIMO radar: An idea whose time has come[C]. Proceedings of the 2004 IEEE Radar Conference (IEEE Cat. No. 04CH37509), Philadelphia, USA, 2004: 71–78.[13] SHI Chenguang, DING Lintao, WANG Fei, et al. Joint target assignment and resource optimization framework for multitarget tracking in phased array radar network[J]. IEEE Systems Journal, 2021, 15(3): 4379–4390. doi: 10.1109/JSYST.2020.3025867[14] LI Jian and STOICA P. MIMO radar with colocated antennas[J]. IEEE Signal Processing Magazine, 2007, 24(5): 106–114. doi: 10.1109/MSP.2007.904812[15] HAIMOVICH A M, BLUM R S, and CIMINI L J. MIMO radar with widely separated antennas[J]. IEEE Signal Processing Magazine, 2008, 25(1): 116–129. doi: 10.1109/MSP.2008.4408448[16] FISHLER E, HAIMOVICH A, BLUM R S, et al. Spatial diversity in radars—models and detection performance[J]. IEEE Transactions on Signal Processing, 2006, 54(3): 823–838. doi: 10.1109/TSP.2005.862813[17] 张光义. 相控阵雷达原理[M]. 国防工业出版社, 2009, 13–18.ZHANG Guangyi, Principle of Phased Array Radar[M]. National Defense Industry Press, 2009, 13–18.[18] SKOLNIK M I. Radar Handbook[M]. New York: McGraw-Hill, 1990, 236–243.[19] BUTT F A, NAQVI I H, and RIAZ U. Hybrid phased-MIMO radar: A novel approach with optimal performance under electronic countermeasures[J]. IEEE Communications Letters, 2018, 22(6): 1184–1187. doi: 10.1109/LCOMM.2018.2828408[20] HASSANIEN A and VOROBYOV S A. Phased-MIMO radar: A tradeoff between phased-array and MIMO radars[J]. IEEE Transactions on Signal Processing, 2010, 58(6): 3137–3151. doi: 10.1109/TSP.2010.2043976[21] DELIGIANNIS A, AMIN M, LAMBOTHARAN S, et al. Optimum sparse subarray design for multitask receivers[J]. IEEE Transactions on Aerospace and Electronic Systems, 2019, 55(2): 939–950. doi: 10.1109/TAES.2018.2867258[22] YI Jianxin, WAN Xianrong, LEUNG H, et al. Joint placement of transmitters and receivers for distributed MIMO radars[J]. IEEE Transactions on Aerospace and Electronic Systems, 2017, 53(1): 122–134. doi: 10.1109/TAES.2017.2649338[23] RADMARD M, CHITGARHA M M, MAJD M N, et al. Antenna placement and power allocation optimization in MIMO detection[J]. IEEE Transactions on Aerospace and Electronic Systems, 2014, 50(2): 1468–1478. doi: 10.1109/TAES.2014.120776[24] XU Jia, DAI Xizeng, XIA Xianggen, et al. Optimizations of multisite radar system with MIMO radars for target detection[J]. IEEE Transactions on Aerospace and Electronic Systems, 2011, 47(4): 2329–2343. doi: 10.1109/TAES.2011.6034636[25] 费太勇, 谭贤四, 张堃, 等. 分布式MIMO数字阵列雷达阵元优化配置[J]. 现代雷达, 2017, 39(8): 22–27. doi: 10.16592/j.cnki.1004-7859.2017.08.006FEI Taiyong, TAN Xiansi, ZHANG Kun, et al. Optimizations of elements configurations for distributed MIMO digital array radar[J]. Modern Radar, 2017, 39(8): 22–27. doi: 10.16592/j.cnki.1004-7859.2017.08.006[26] 费太勇, 谭贤四, 林强, 等. 分布式MIMO数字阵列雷达检测性能研究[J]. 华中科技大学学报:自然科学版, 2017, 45(12): 80–85. doi: 10.13245/j.hust.171213FEI Taiyong, TAN Xiansi, LIN Qiang, et al. Research on detection performance for distributed MIMO digital array radar[J]. Journal of Huazhong University of Science and Technology:Natural Science Edition, 2017, 45(12): 80–85. doi: 10.13245/j.hust.171213[27] ZHOU Shenghua, LIU Hongwei, ZHAO Yongbo, et al. Target spatial and frequency scattering diversity property for diversity MIMO radar[J]. Signal Processing, 2011, 91(2): 269–276. doi: 10.1016/j.sigpro.2010.07.004[28] SIDIROPOULOS N D, GINI F, CHELLAPPA R, et al. Academic Press Library in Signal Processing: Volume 2: Communications and Radar Signal Processing[M]. Amsterdam: Elsevier, 2014: 329–408.[29] XU Jia, DAI Xizeng, XIA Xianggen, et al. Optimal transmitting diversity degree-of-freedom for statistical MIMO radar[C]. 2010 IEEE Radar Conference, Arlington, USA, 2010: 437–440.[30] SUN Jun, XU Wenbo, and FENG Bin. A global search strategy of quantum-behaved particle swarm optimization[C]. IEEE Conference on Cybernetics and Intelligent Systems, 2004, Singapore, 2004: 111–116.[31] SUN Jun, XU Wenbo, and FENG Bin. Adaptive parameter control for quantum-behaved particle swarm optimization on individual level[C]. 2005 IEEE International Conference on Systems, Man and Cybernetics, Waikoloa, USA, 2005: 3049–3054.[32] ZHANG Haowei, SHI Junpeng, ZHANG Qiliang, et al. Antenna selection for target tracking in collocated MIMO radar[J]. IEEE Transactions on Aerospace and Electronic Systems, 2021, 57(1): 423–436. doi: 10.1109/TAES.2020.3031767 -
Proportional views

- Publishing Ethics
- Journal Insights
- Abstracting & Indexing
- Peer Review Policies
- Guide for Authors
- Conference
- ISSN 2095-283X (Print)ISSN 2097-339X (Online)
- CN 10-1030/TN
- CODEN LXEUAO
About Journal
- Sponsor: China Radio Detection and Ranging Industry Association (CRIA)
- Phone: 010-58887062
- Email:radars@aircas.ac.cn
- Publisher: Leida Xuebao Bianjibu (Editorial office of the Journal of Radars)
Contacts Us

京ICP备20021838号-14
Supported by: Beijing Renhe Information Technology Co. Ltd

Export File
Citation
Format
Content
 DownLoad:
DownLoad:



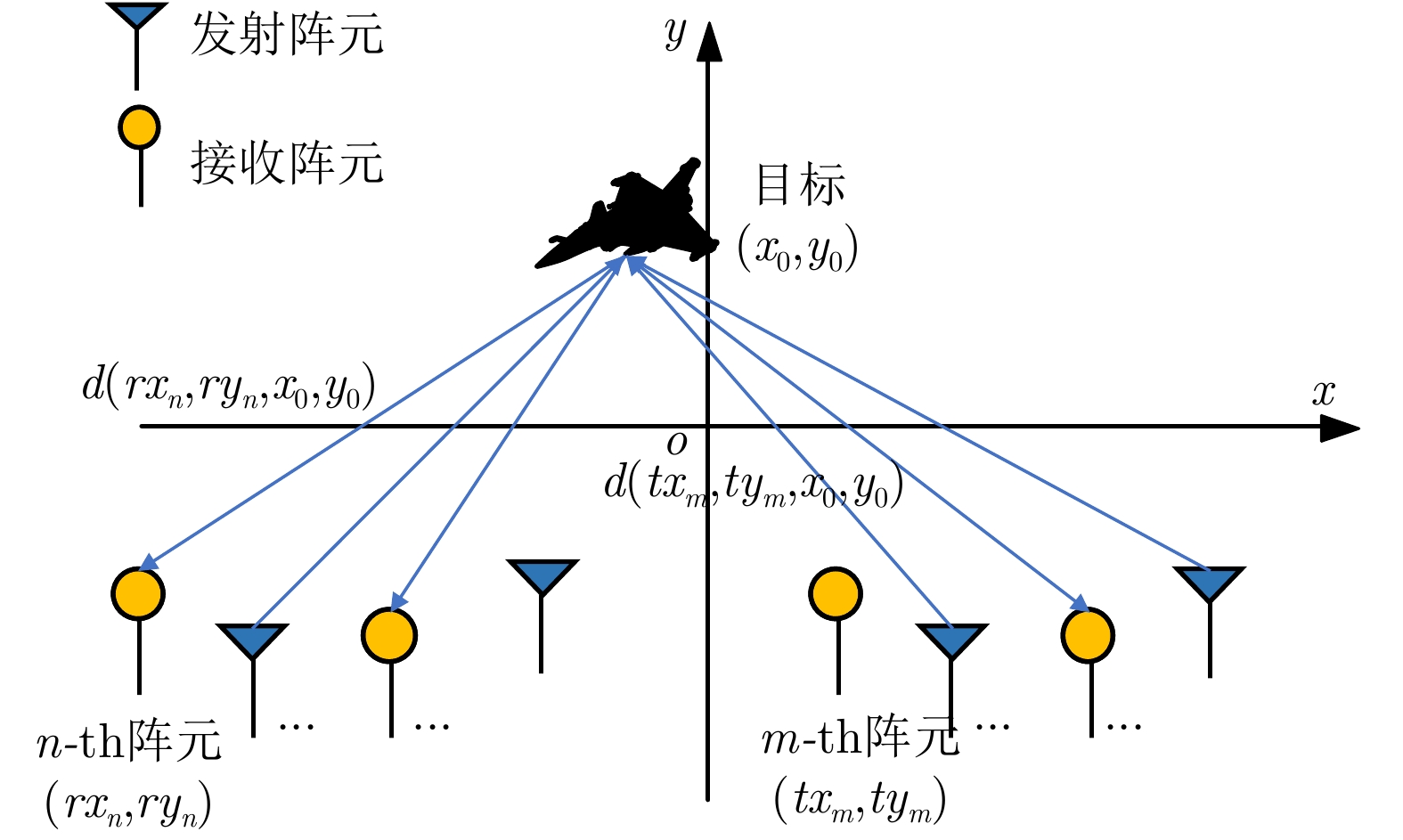
- Figure 1. Schematic diagram of the hybrid distributed PA-MIMO radar structure
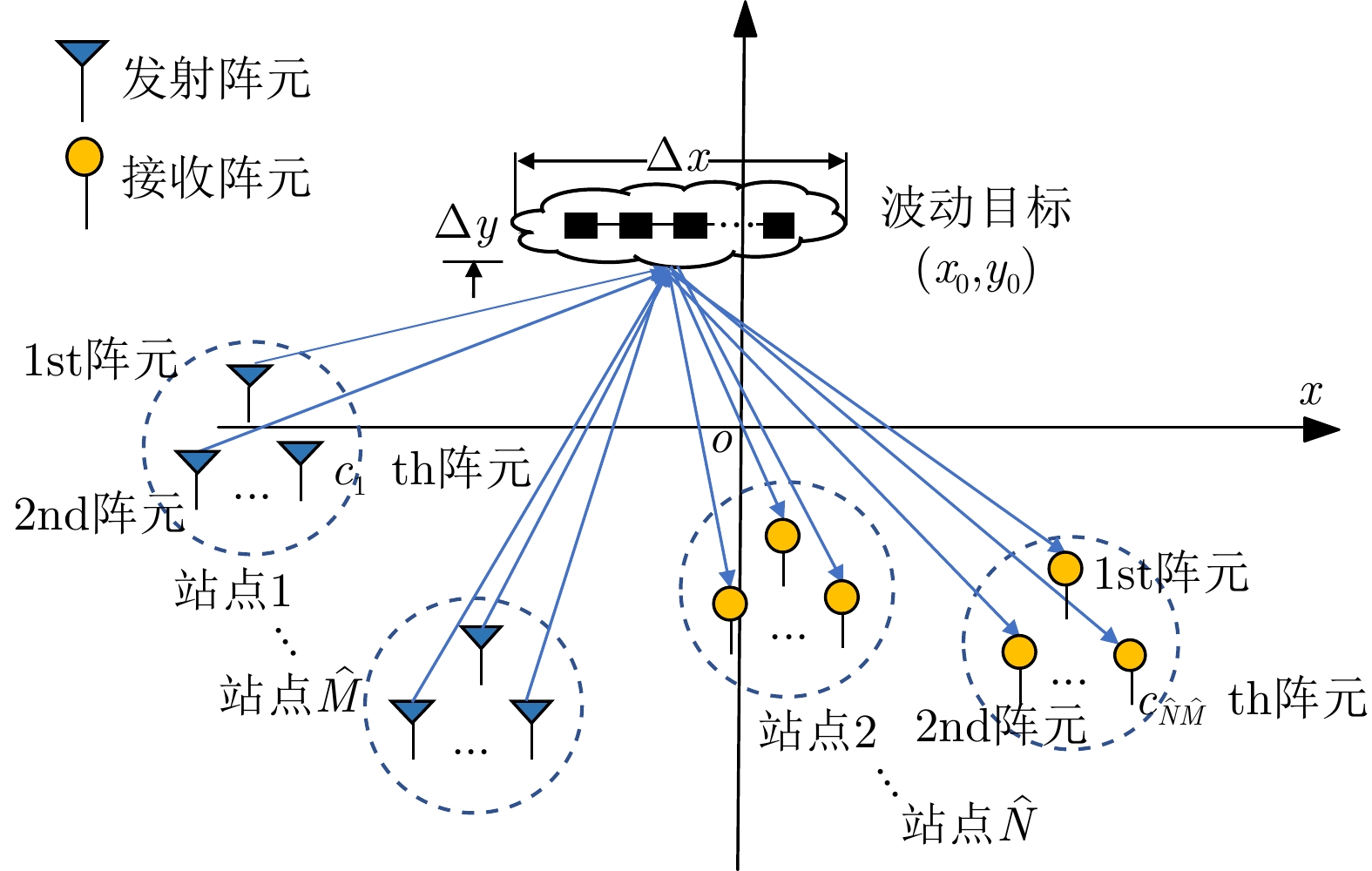
- Figure 2. Structure diagram of hybrid distributed PA-MIMO radar array element optimization configuration
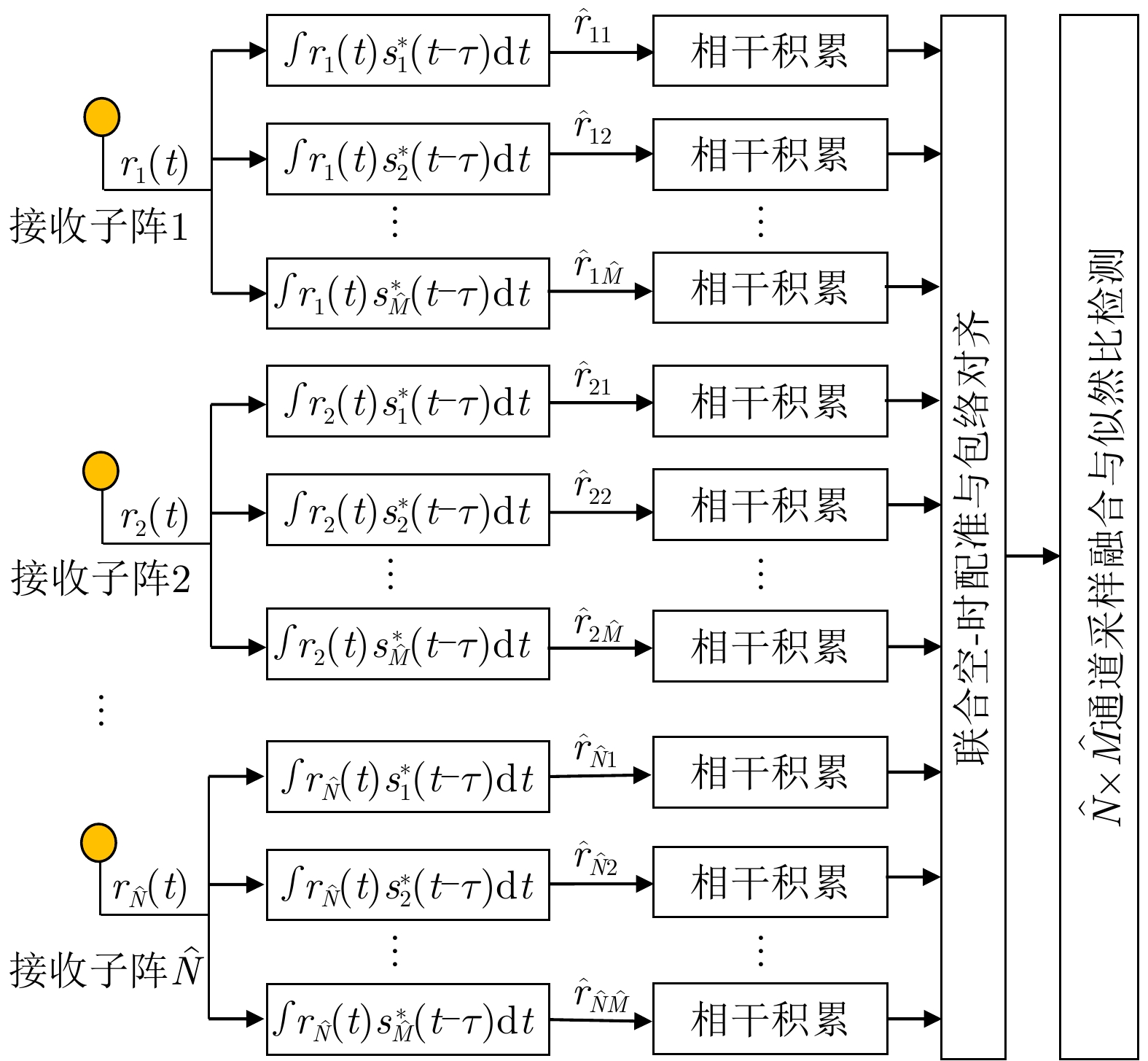
- Figure 3. Signal processing flow of hybrid distributed PA-MIMO radar
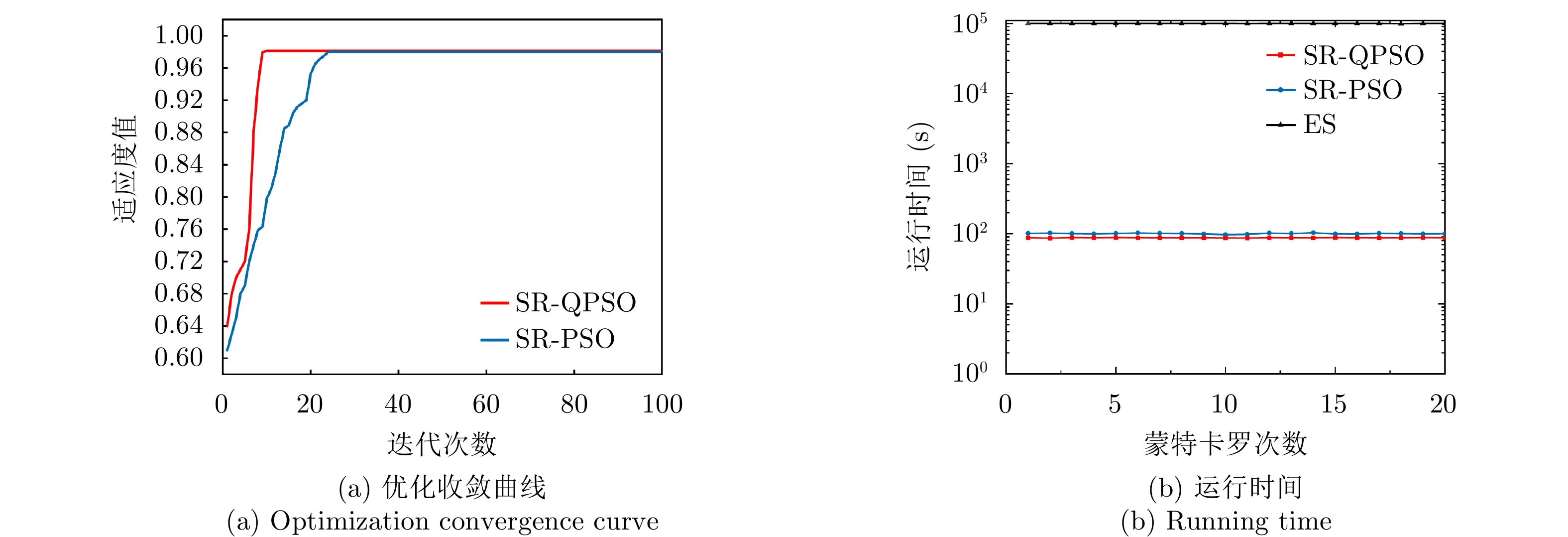
- Figure 4. Algorithm performance comparison based on optimization problem 1
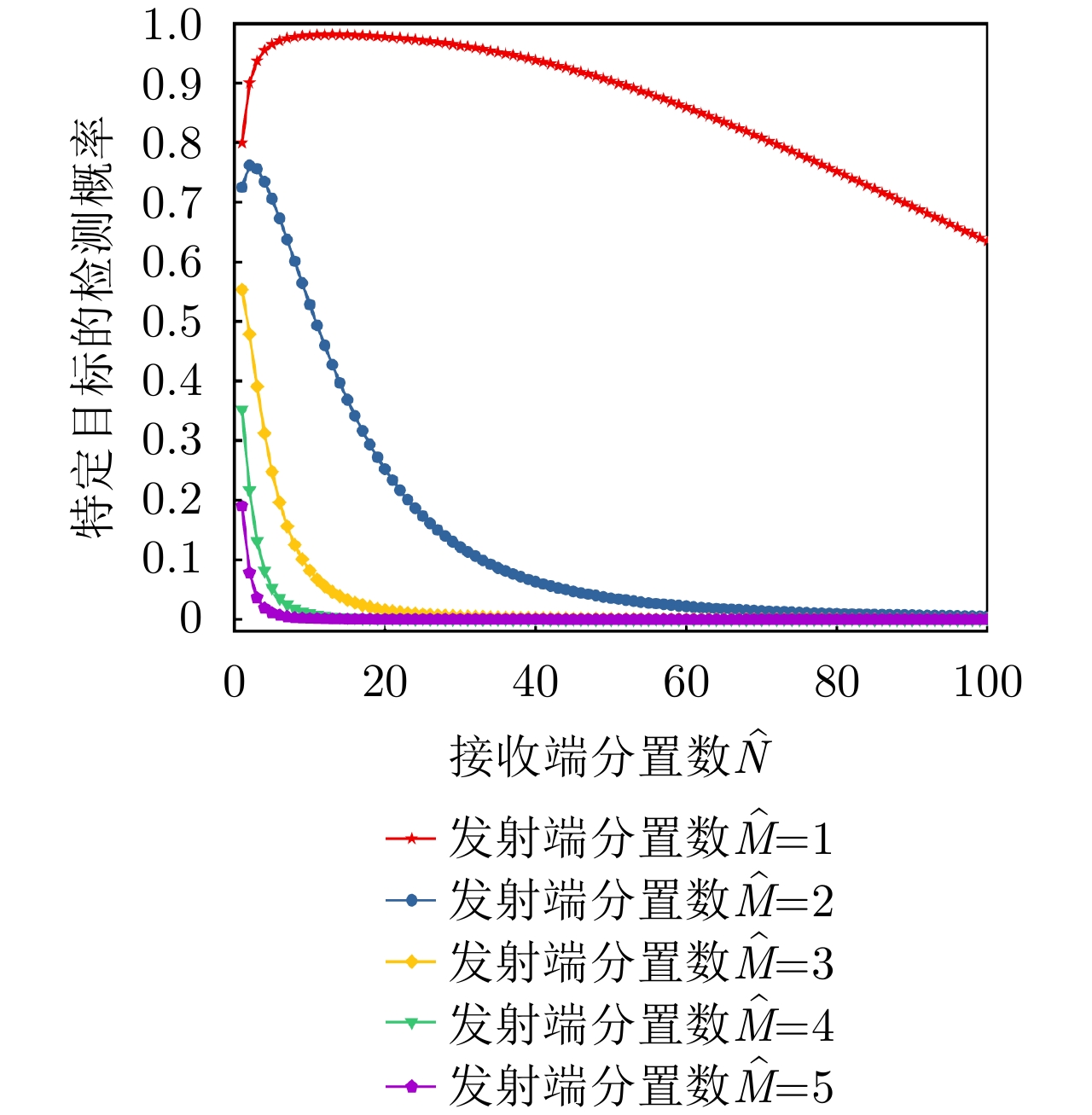
- Figure 5. Relation curves between detection probability and diversity DOF at receiver
- Figure 6. Relation curves between detection probability and diversity DOF at transmitter
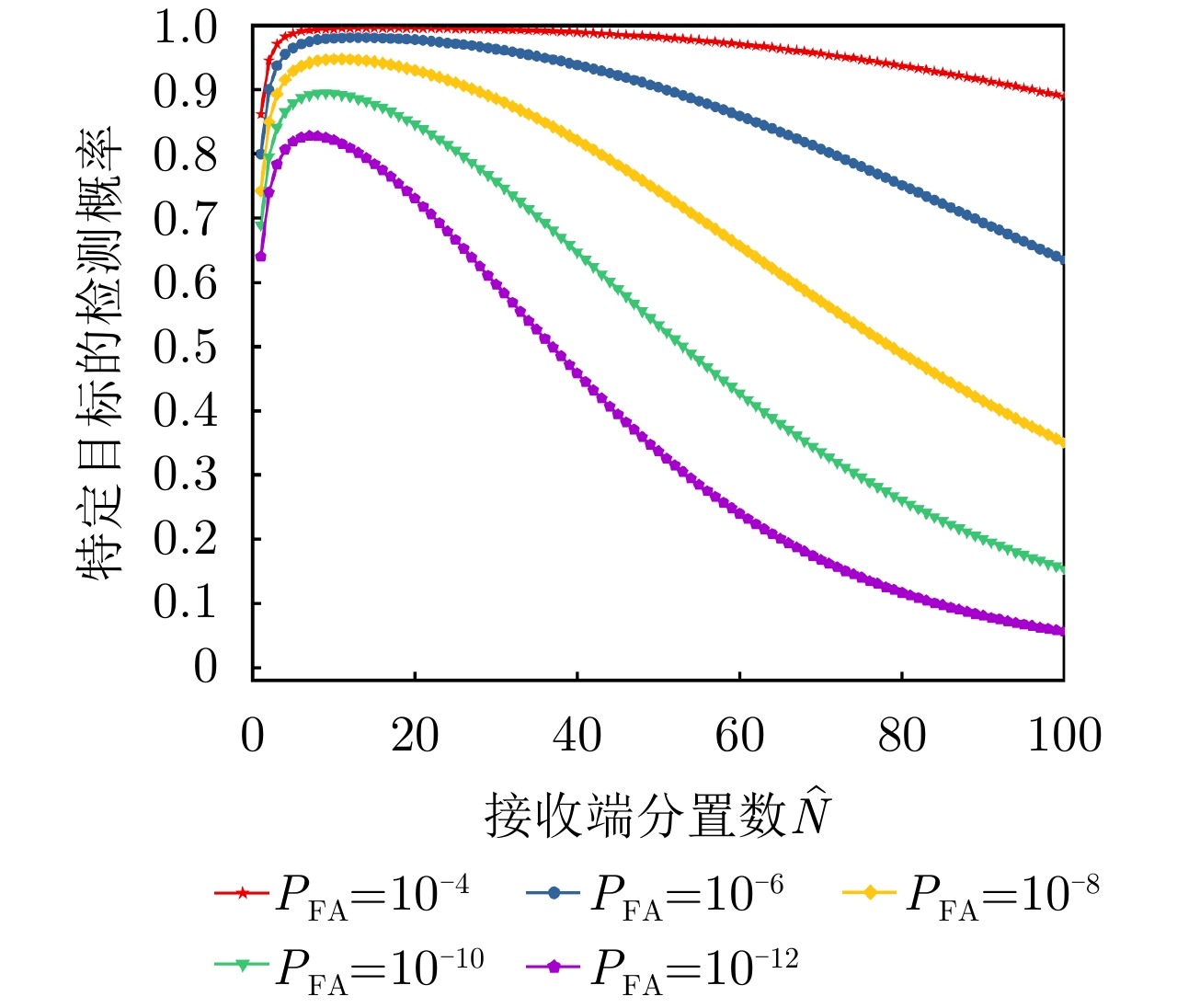
- Figure 7. Relation curves between detection probability and diversity DOF at receiver with different false alarm probabilities
- Figure 8. Algorithm performance comparison based on optimization problem 2
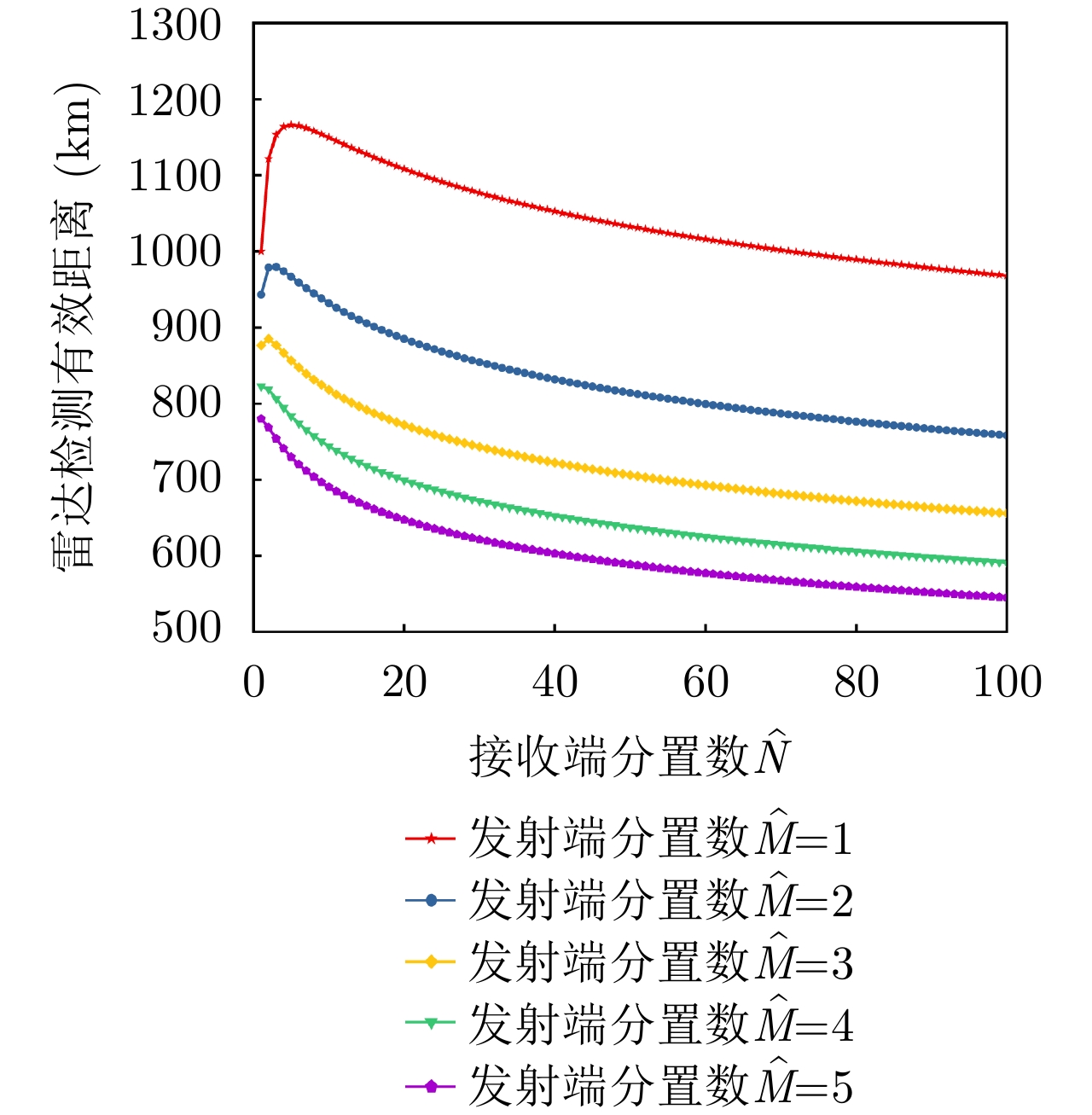
- Figure 9. Relation curves between radar effective range and diversity DOF at receiver
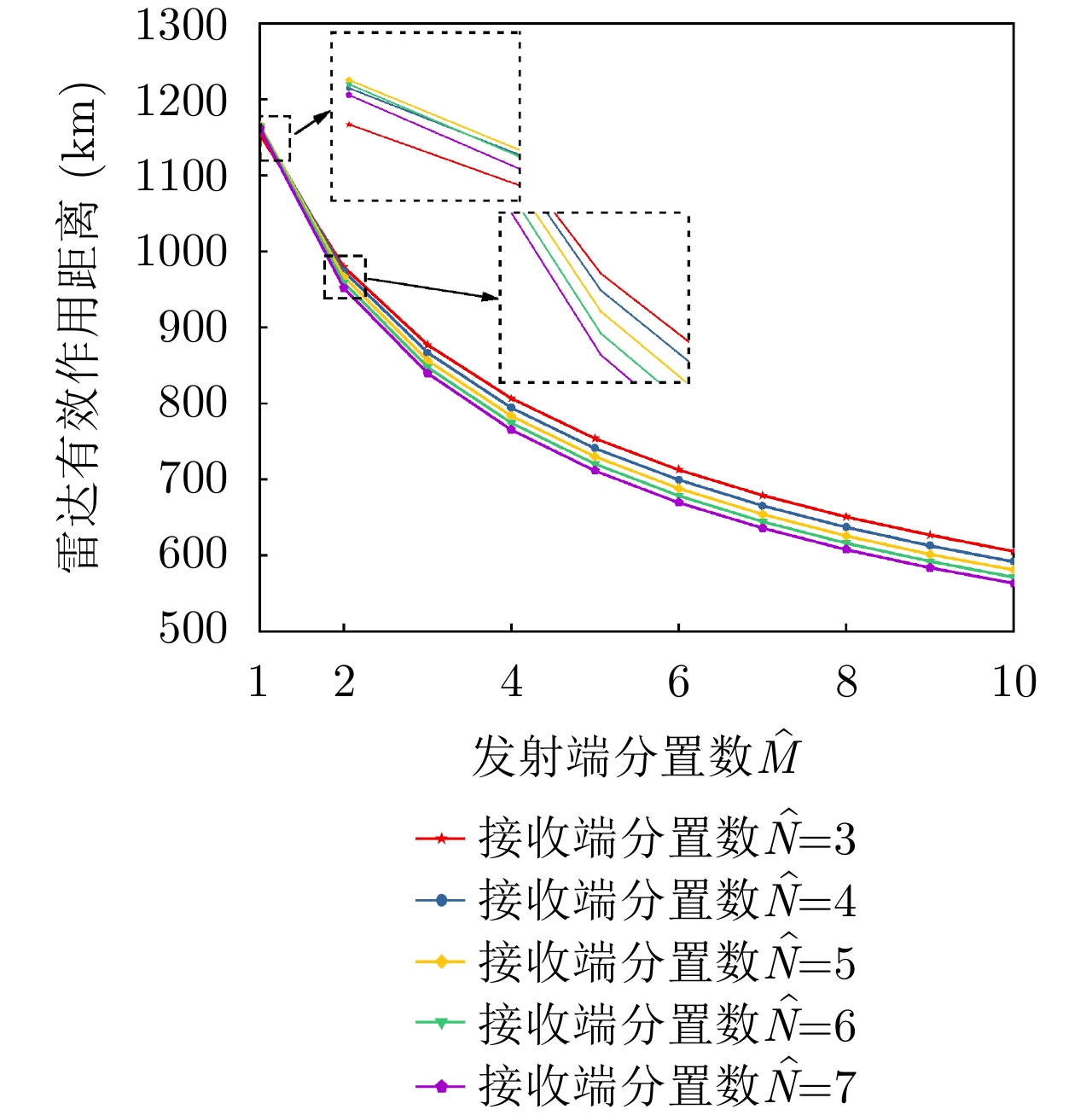
- Figure 10. Relation curves between effective range of radar and diversity DOF at transmitter
- Figure 11. Relation curves between radar effective range and diversity DOF at receiver with different detection probabilities
- Figure 12. Relation curves between effective range of radar and diversity DOF at receiver with different false alarm probabilities
- Figure 13. Radar array element configuration strategies with different detection probabilities
- Figure 14. Radar array element configuration strategies with different false alarm probabilities