
 Submit Manuscript
Submit Manuscript Peer Review
Peer Review Editor Work
Editor Work- Home
- Articles & Issues
-
Data
- Dataset of Radar Detecting Sea
- SAR Dataset
- SARGroundObjectsTypes
- SARMV3D
- AIRSAT Constellation SAR Land Cover Classification Dataset
- 3DRIED
- UWB-HA4D
- LLS-LFMCWR
- FAIR-CSAR
- MSAR
- SDD-SAR
- FUSAR
- SpaceborneSAR3Dimaging
- Sea-land Segmentation
- SAR Multi-domain Ship Detection Dataset
- SAR-Airport
- Hilly and mountainous farmland time-series SAR and ground quadrat dataset
- SAR images for interference detection and suppression
- HP-SAR Evaluation & Analytical Dataset
- GDHuiYan-ATRNet
- Multi-System Maritime Low Observable Target Dataset
- DatasetinthePaper
- DatasetintheCompetition
- Report
- Course
- About
- Publish
- Editorial Board
- Chinese

| Citation: | LI Bo, CEN Zongjun, and TANG Jun. A new method of target detection for passive radar based on information accumulation[J]. Journal of Radars, 2020, 9(6): 959–966. doi: 10.12000/JR20023

|
A New Method of Target Detection for Passive Radar Based on Information Accumulation
DOI: 10.12000/JR20023 CSTR: 32380.14.JR20023
More Information-
Abstract
Owing to their strong anti-stealth performance, good concealment and strong survivability, passive radar systems have a wide range of applications in both military and civilian fields. We propose a method of target detection for passive radar systems which is based on the characteristics of these systems and the track-before-detect concept. This method accumulates information to effectively detect weak targets with low signal-to-noise ratios and meet real-time requirements. First, we discretize the state space, then perform recursive Bayesian filtering to transfer and accumulate target-state information between multiple frames. Lastly, the information entropy is used to determine whether the target exists, thereby avoiding reliance on a prior assumption about the transition probability model between the existence and the absence of the target. This method is simple to implement and has low computational complexity and high parallelism. The experimental results indicate that the proposed method has a short running time and strong real-time performance, as well as good detection performance and robustness. -

-
References
[1] GRIFFITHS H D and BAKER C J. An Introduction to Passive Radar[M]. Boston, US: Artech House, 2017: 1–25.[2] WILLIS N J. Bistatic Radar[M]. Raleigh, US: SciTech Publishing, 2005: 15–57.[3] KULPA K and MALANOWSKI M. From Klein Heidelberg to modern multistatic passive radar[C]. The 2019 20th International Radar Symposium (IRS), Ulm, Germany, 2019: 1–9. doi: 10.23919/IRS.2019.8768176.[4] 何友, 关键, 孟祥伟, 等. 雷达目标检测与恒虚警处理[M]. 2版. 北京: 清华大学出版社, 2011: 36–40.HE You, GUAN Jian, MENG Xiangwei, et al. Radar Target Detection and CFAR Processing[M]. 2nd ed. Beijing: Tsinghua University Press, 2011: 36–40.[5] CARLSON B D, EVANS E D, and WILSON S L. Search radar detection and track with the Hough transform. I. system concept[J]. IEEE Transactions on Aerospace and Electronic Systems, 1994, 30(1): 102–108. doi: 10.1109/7.250410[6] BARNIV Y. Dynamic programming solution for detecting dim moving targets[J]. IEEE Transactions on Aerospace and Electronic Systems, 1985, AES–21(1): 144–156. doi: 10.1109/TAES.1985.310548[7] YI Wei, JIANG Haichao, KIRUBARAJAN T, et al. Track-before-detect strategies for radar detection in G0-distributed clutter[J]. IEEE Transactions on Aerospace and Electronic Systems, 2017, 53(5): 2516–2533. doi: 10.1109/TAES.2017.2702259[8] SALMOND D J and BIRCH H. A particle filter for track-before-detect[C]. 2001 American Control Conference, Arlington, USA, 2001: 3755–3760. doi: 10.1109/ACC.2001.946220.[9] RUTTEN M G, GORDON N J, and MASKELL S. Recursive track-before-detect with target amplitude fluctuations[J]. IEE Proceedings-Radar, Sonar and Navigation, 2005, 152(5): 345–352. doi: 10.1049/ip-rsn:20045041[10] RUTTEN M G, GORDON N J, and MASKELL S. Efficient particle-based track-before-detect in Rayleigh noise[C]. The 7th International Conference on Information Fusion, Stockholm, Sweden, 2004: 693–700.[11] JISHY K and LEHMANN F. A Bayesian track-before-detect procedure for passive radars[J]. EURASIP Journal on Advances in Signal Processing, 2013, 2013(1): 45. doi: 10.1186/1687-6180-2013-45[12] ROLLASON M and SALMOND D. Particle filter for track-before-detect of a target with unknown amplitude viewed against a structured scene[J]. IET Radar, Sonar & Navigation, 2018, 12(6): 603–609. doi: 10.1049/iet-rsn.2017.0483[13] STONE L D, CORWIN T L, and BARLOW C A. Bayesian Multiple Target Tracking[M]. Boston, US: Artech House, 2013: 65–77.[14] ARULAMPALAM M S, MASKELL S, GORDON N, et al. A tutorial on particle filters for online nonlinear/non-Gaussian Bayesian tracking[J]. IEEE Transactions on Signal Processing, 2002, 50(2): 174–188. doi: 10.1109/78.978374[15] MAHAFZA B R. Introduction to Radar Analysis[M]. Boca Raton, US: CRC Press, 1998: 267–287.[16] DAVEY S J, RUTTEN M G, and CHEUNG B. A comparison of detection performance for several track-before-detect algorithms[J]. EURASIP Journal on Advances in Signal Processing, 2007, 2008(1): 428036. doi: 10.1155/2008/428036 -
Proportional views

- Publishing Ethics
- Journal Insights
- Abstracting & Indexing
- Peer Review Policies
- Guide for Authors
- Conference
- ISSN 2095-283X (Print)ISSN 2097-339X (Online)
- CN 10-1030/TN
- CODEN LXEUAO
About Journal
- Sponsor: China Radio Detection and Ranging Industry Association (CRIA)
- Phone: 010-58887062
- Email:radars@aircas.ac.cn
- Publisher: Leida Xuebao Bianjibu (Editorial office of the Journal of Radars)
Contacts Us

京ICP备20021838号-14
Supported by: Beijing Renhe Information Technology Co. Ltd

Export File
Citation
Format
Content
 DownLoad:
DownLoad:


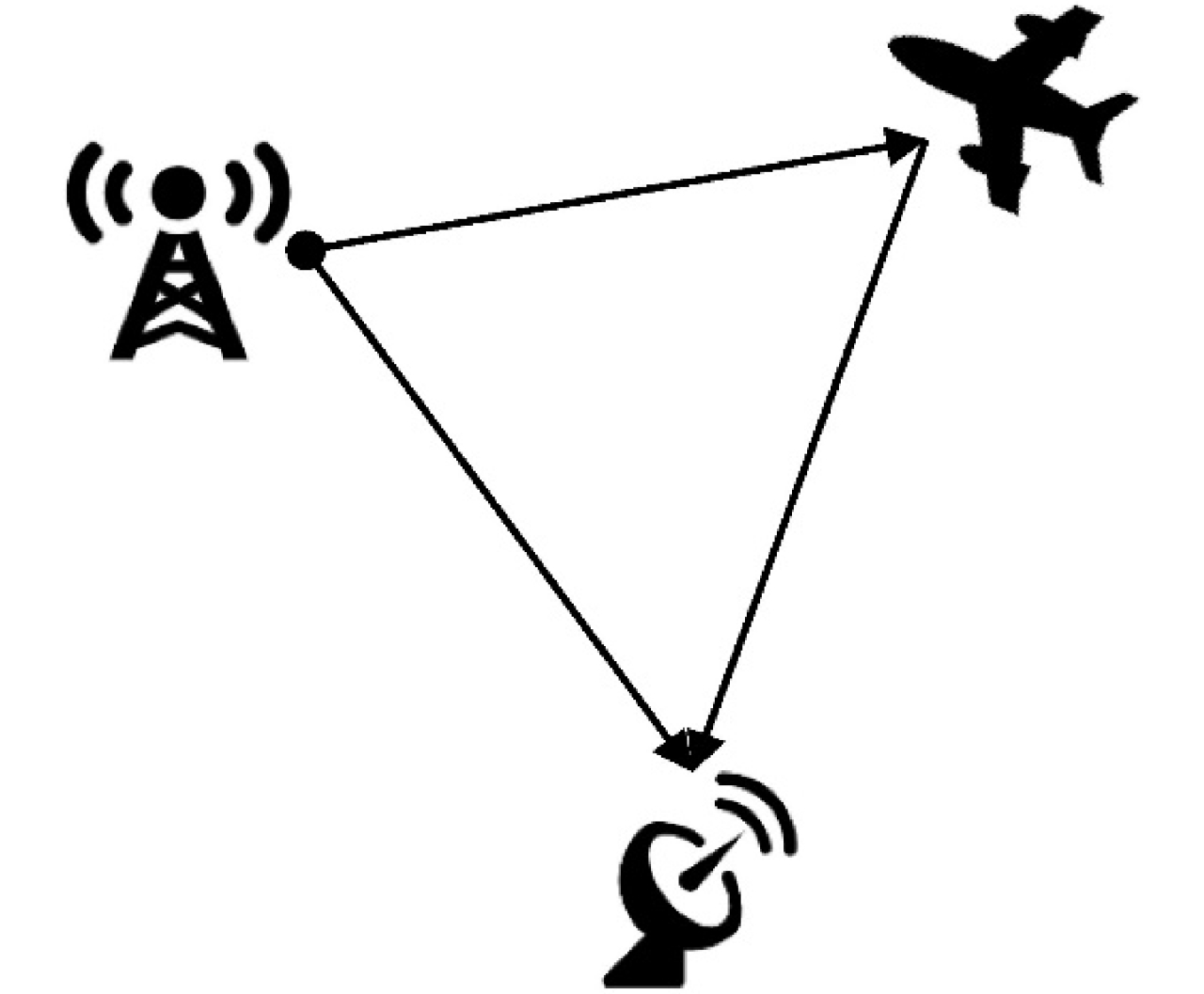
- Figure 1. Working principle for passive radar
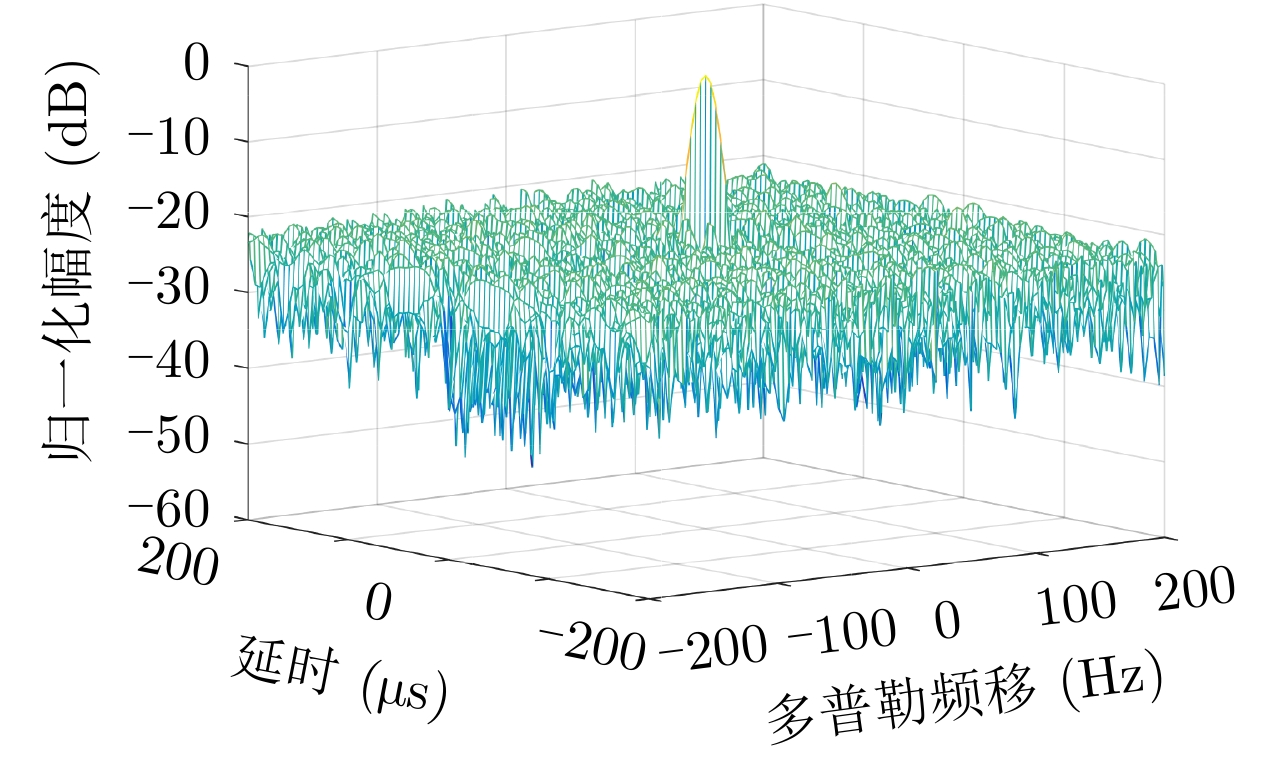
- Figure 2. The ambiguity function of FM broadcast signal
- Figure 3. Relationship of the probability of false alarm and threshold
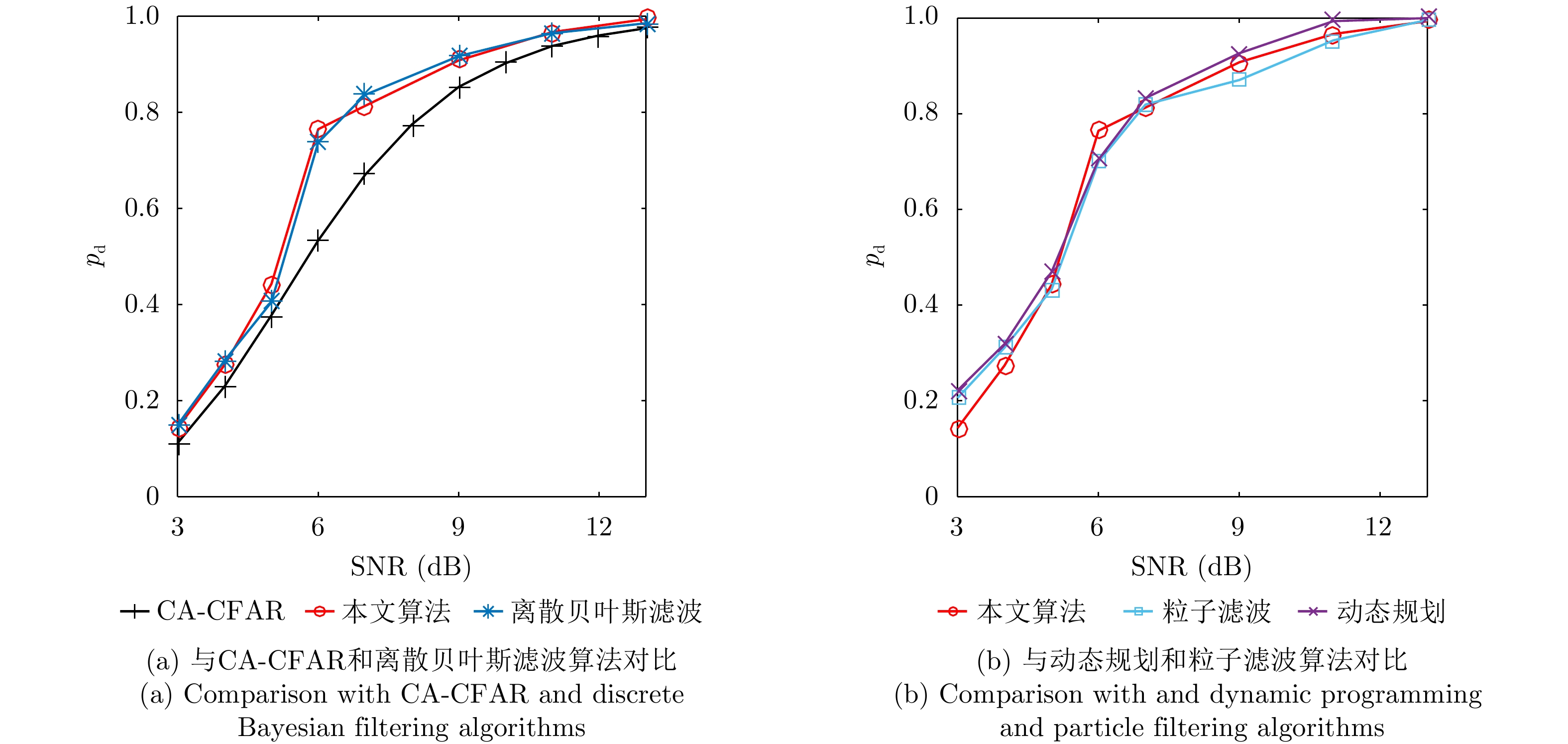
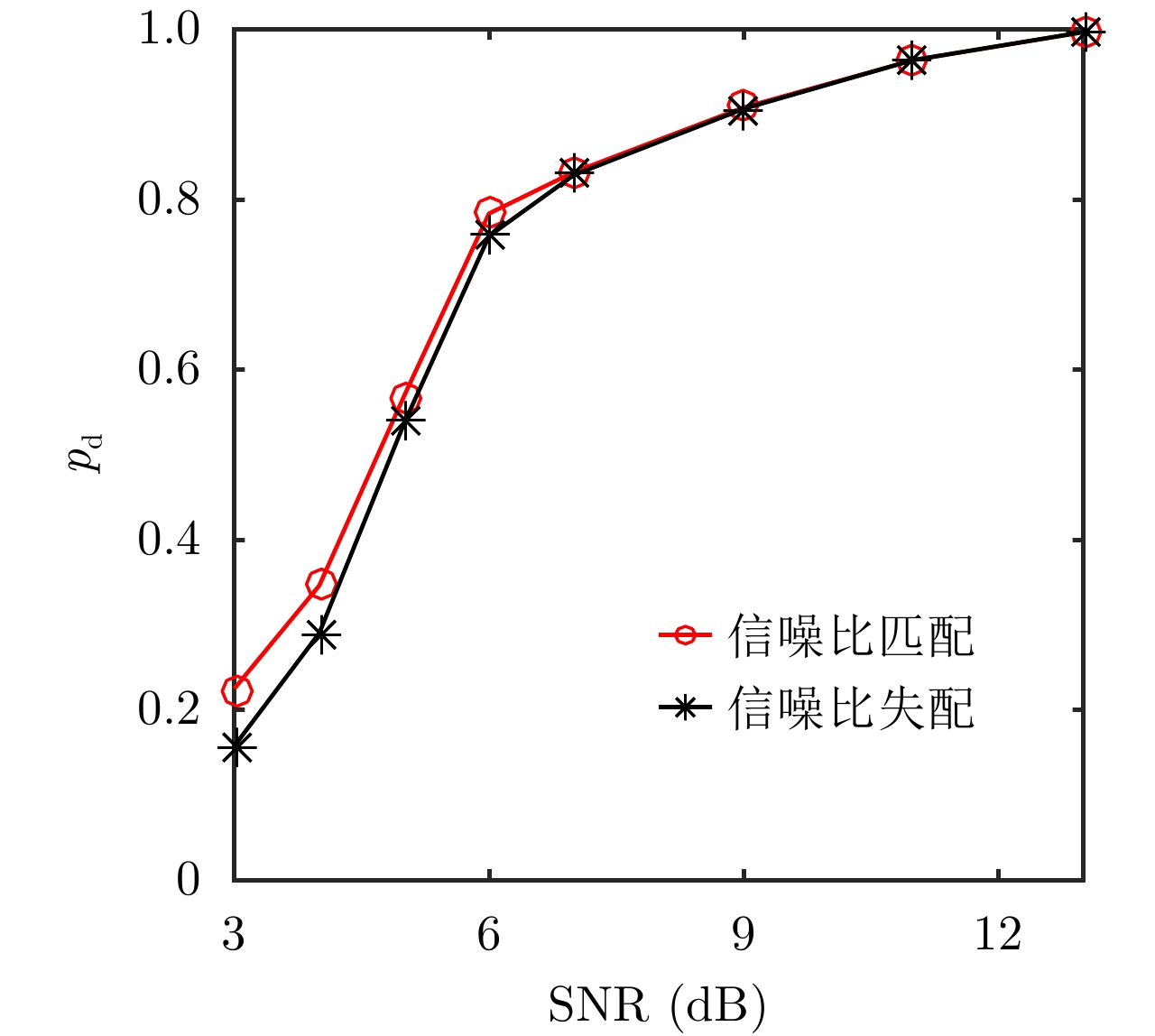
- Figure 4. Relationship of the probability of target detection and SNR
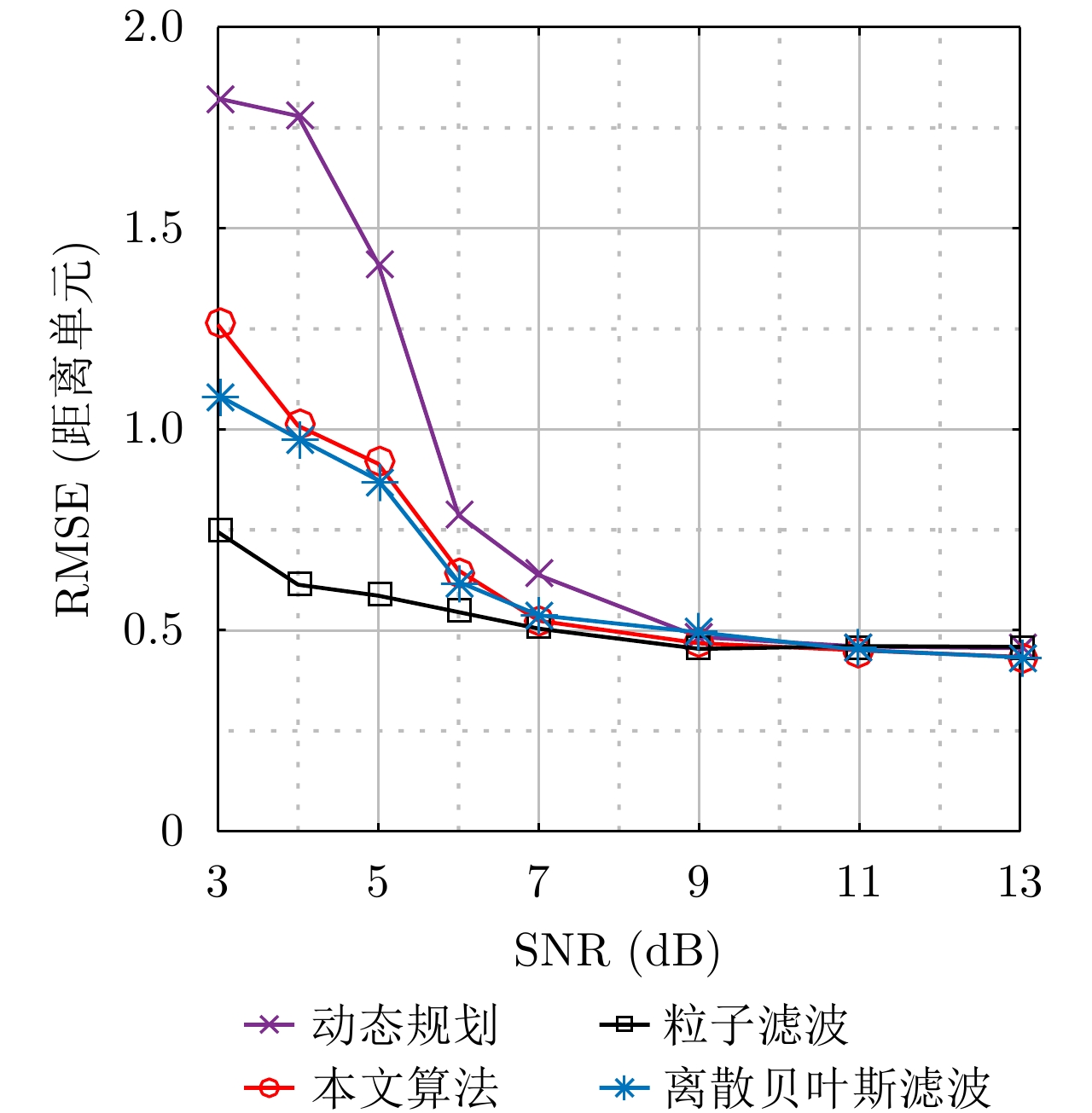
- Figure 5. Relationship of the RMSE and SNR
- Figure 6. Relationship of the probability of target detection and SNR
- Figure 7. Relationship of the RMSE and SNR
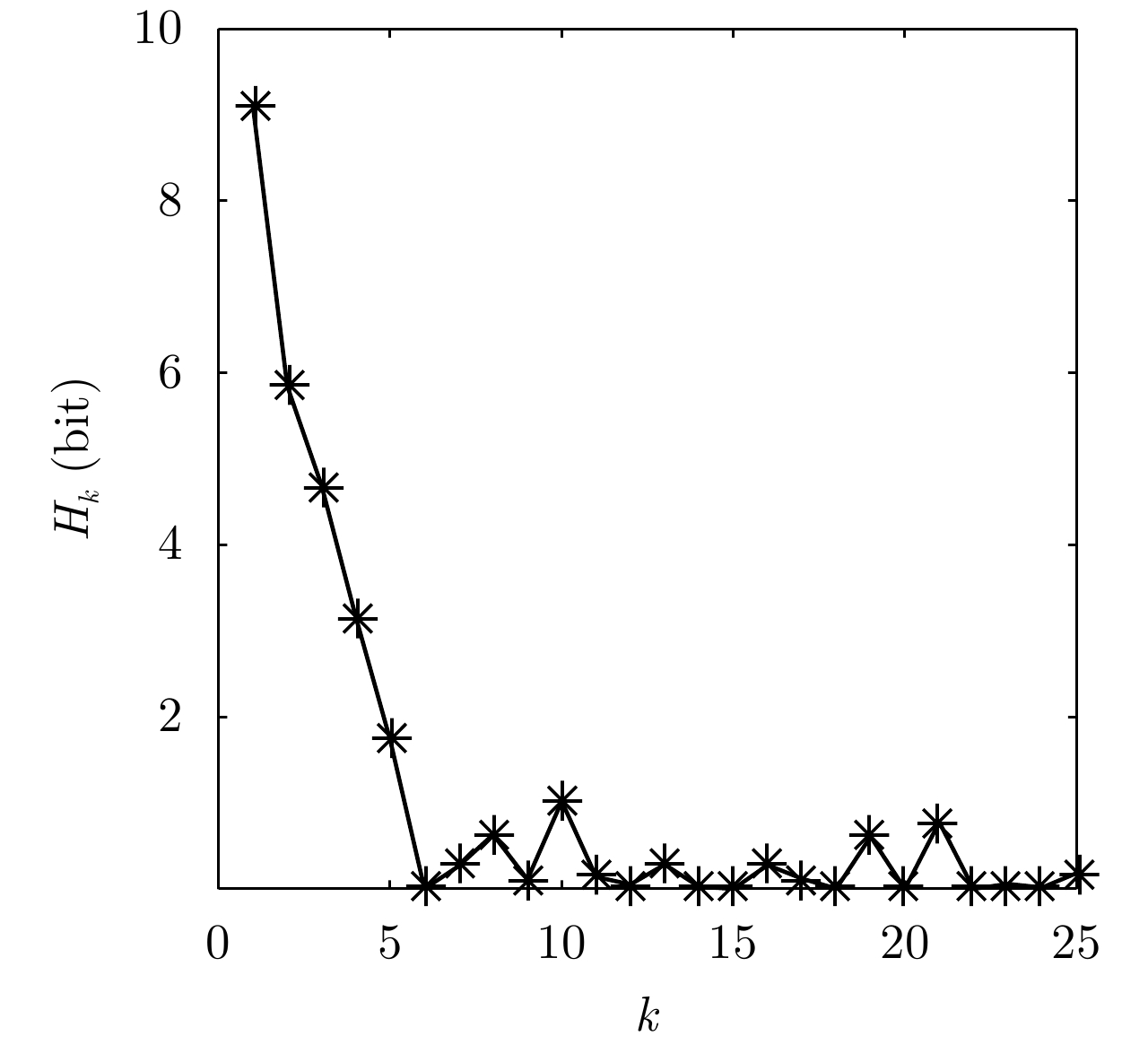
- Figure 8. Relationship of the information entropy and time
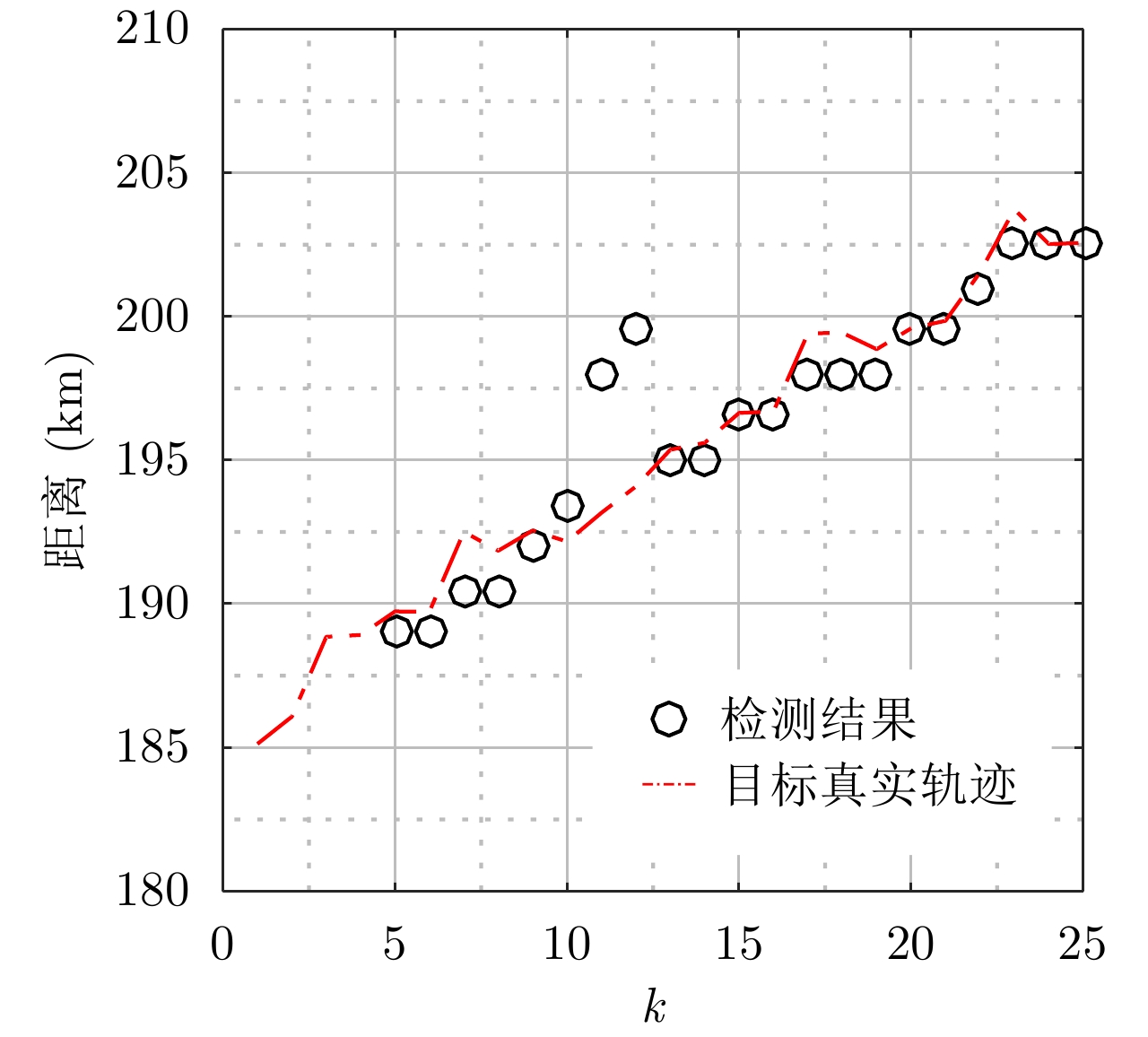
- Figure 9. The results of the estimated target range
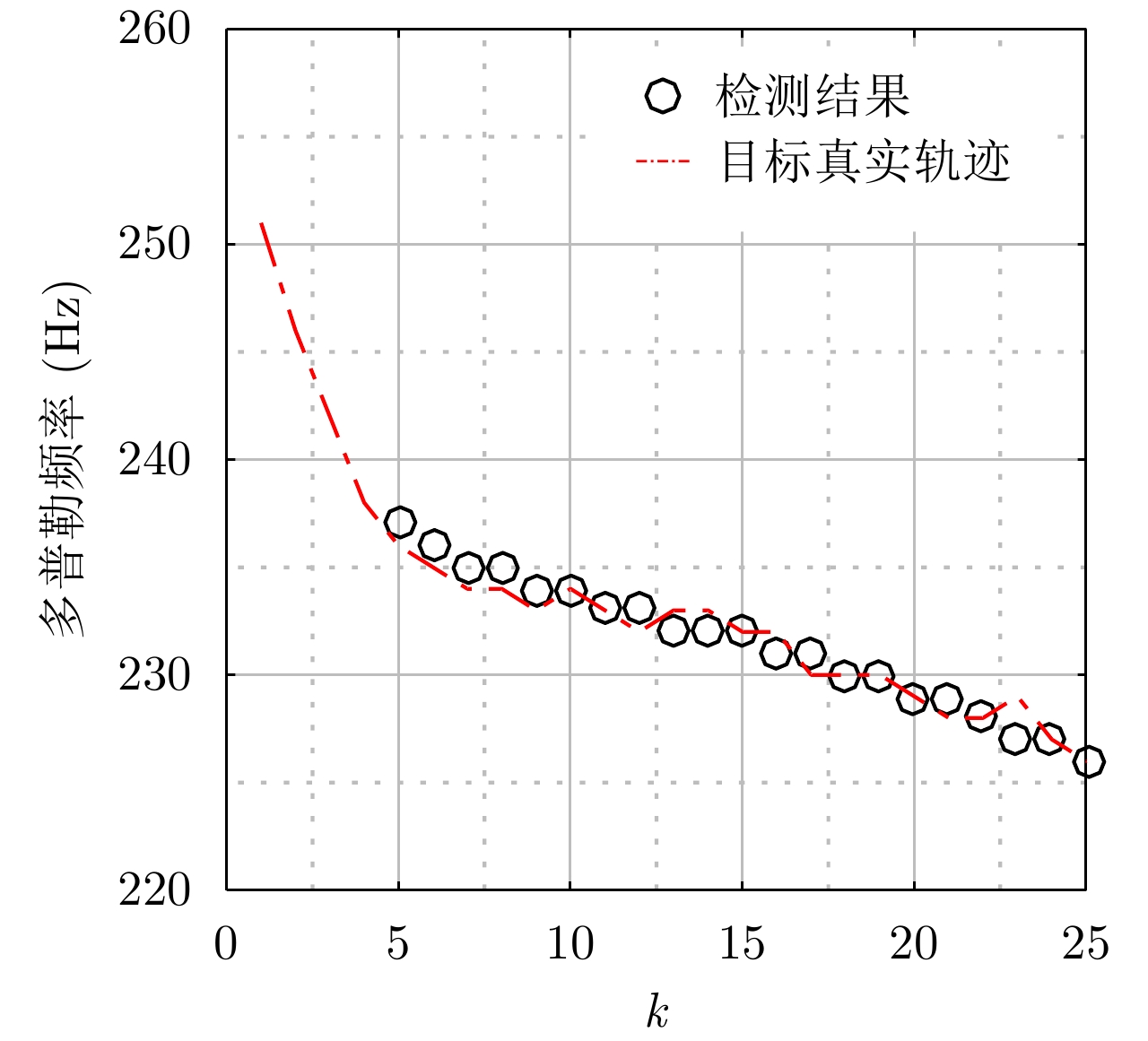
- Figure 10. The results of the estimated target Doppler frequency