
 Submit Manuscript
Submit Manuscript Peer Review
Peer Review Editor Work
Editor Work- Home
- Articles & Issues
-
Data
- Dataset of Radar Detecting Sea
- SAR Dataset
- SARGroundObjectsTypes
- SARMV3D
- AIRSAT Constellation SAR Land Cover Classification Dataset
- 3DRIED
- UWB-HA4D
- LLS-LFMCWR
- FAIR-CSAR
- MSAR
- SDD-SAR
- FUSAR
- SpaceborneSAR3Dimaging
- Sea-land Segmentation
- SAR Multi-domain Ship Detection Dataset
- SAR-Airport
- Hilly and mountainous farmland time-series SAR and ground quadrat dataset
- SAR images for interference detection and suppression
- HP-SAR Evaluation & Analytical Dataset
- GDHuiYan-ATRNet
- Multi-System Maritime Low Observable Target Dataset
- DatasetinthePaper
- DatasetintheCompetition
- Report
- Course
- About
- Publish
- Editorial Board
- Chinese

| Citation: | Xu Zhihuo, Shi Quan, Sun Ling. Novel Orthogonal Random Phase-Coded Pulsed Radar for Automotive Application[J]. Journal of Radars, 2018, 7(3): 364-375. doi: 10.12000/JR17083

|
Novel Orthogonal Random Phase-Coded Pulsed Radar for Automotive Application
DOI: 10.12000/JR17083 CSTR: 32380.14.JR17083
More Information-
Abstract
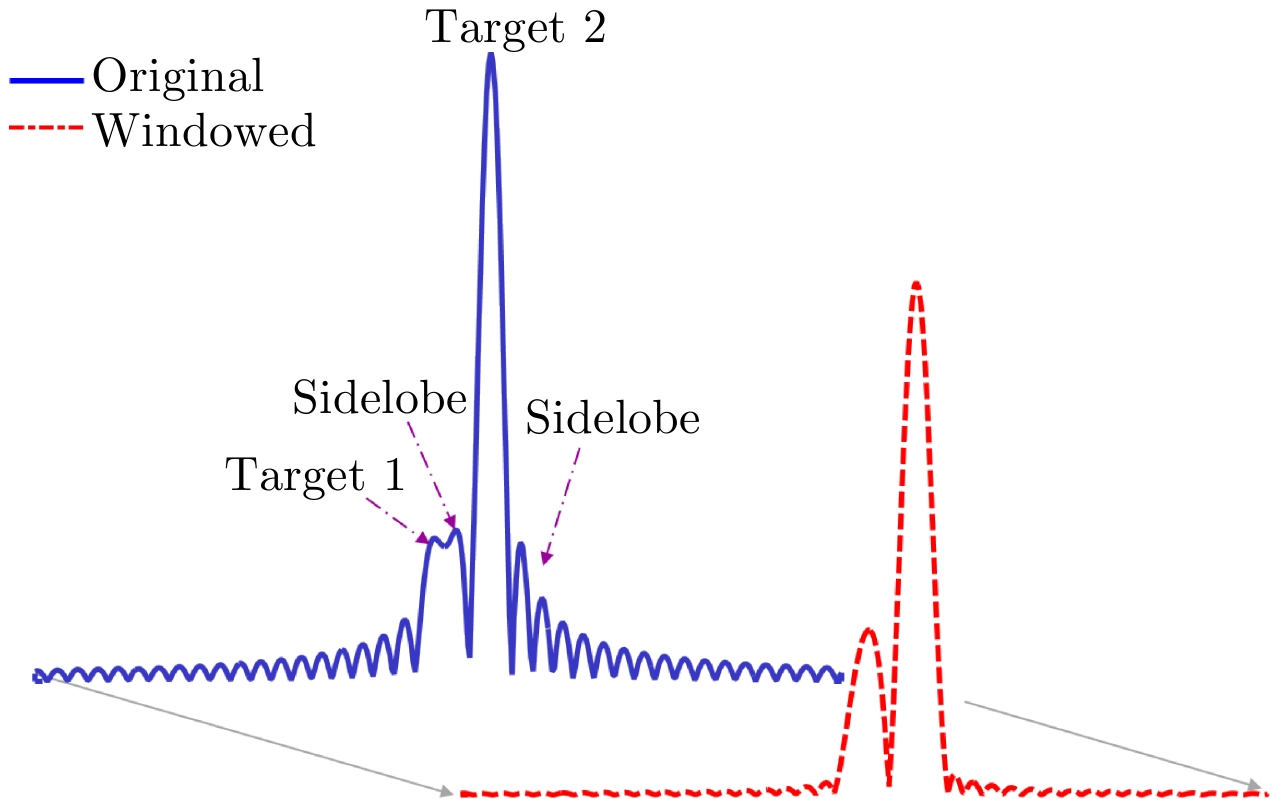
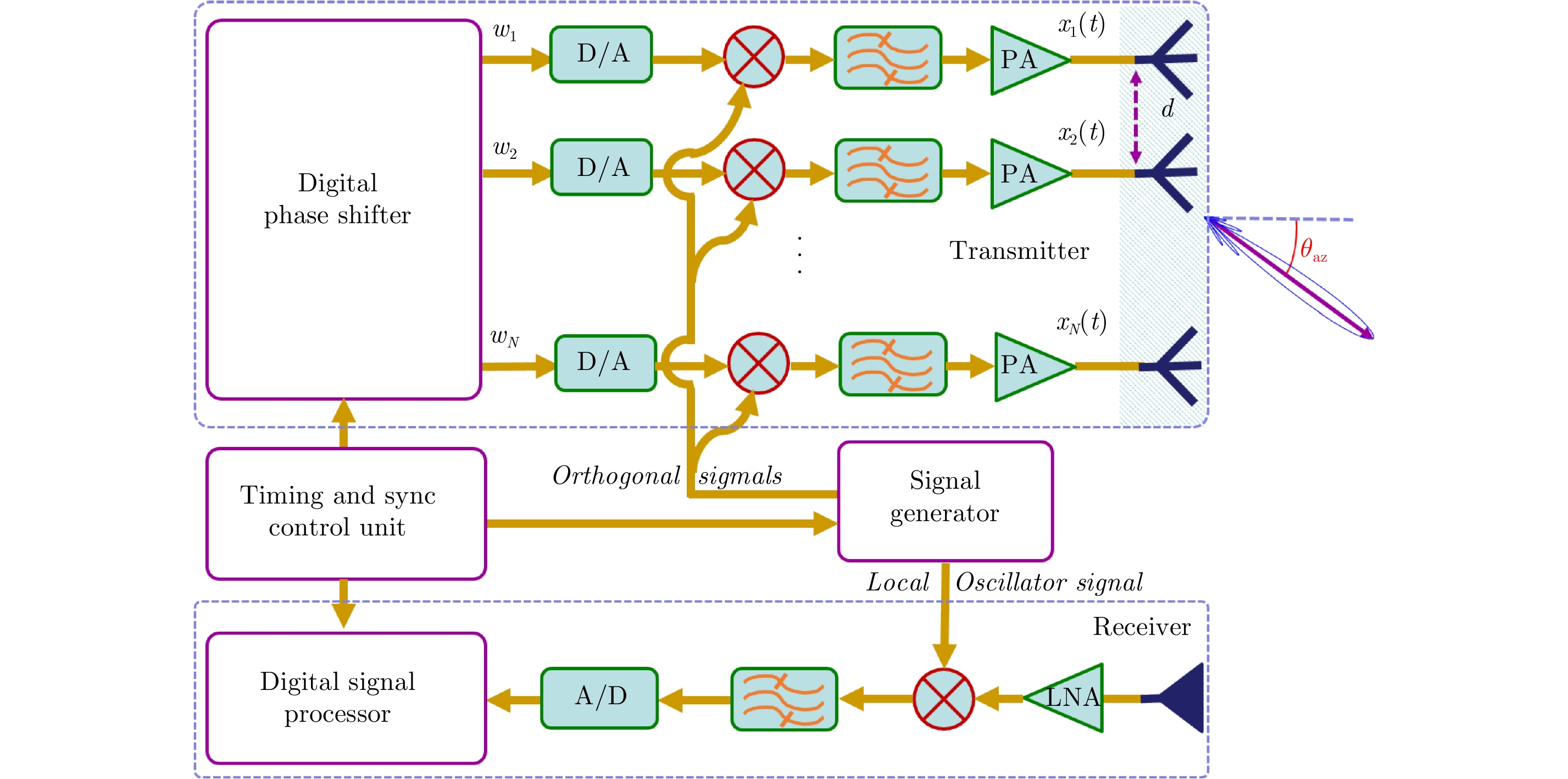
In contrast to remote sensing radar, automotive radar focuses on the detection of short-range targets in the 0–1000 m range. Conventional automotive pulsed radar usually uses a monostatic antenna and it requires high peak power for the transmission of the short duration pulses to reliably detect targets at close range with a high resolution. Unfortunately, it is difficult and expensive to generate high-powered pulses on the nanosecond scale. Meanwhile, the existing automotive radars suffer from bottlenecks, i.e., spatial resolution, sidelobe levels, and Inter-Sensor Interference (ISI). To overcome the above challenges, a bistatic antenna to transmit and receive large time-bandwidth product waveforms is firstly proposed in this paper. Secondly, high spatial resolution is implemented using a Digital Beam Forming (DBF) transmitter and the high range resolution is achieved by using the pulse compression technique. Additionally, the radial velocity of the target is calculated by applying pulse Doppler processing. Finally, to deal with the sidelobe effect of impulse response function of point target and the interference arising from neighboring radars, novel Orthogonal Random Phase-Coded (ORPC) radar signals are presented. Using these ORPC signals, the impulse response function of the radar can achieve a peak sidelobe ratio of –45 dB without any loss in the signal-to-noise ratio. Most importantly, interference can be significantly reduced by using the proposed signals. Extensive simulations demonstrate the effectiveness and advantages of the proposed radar. -

-
References
[1] Abou-Jaoude R. ACC radar sensor technology, test requirements, and test solutions[J]. IEEE Transactions on Intelligent Transportation Systems, 2003, 4(3): 115–122. DOI: 10.1109/TITS.2003.821286[2] Patole S M, Torlak M, Wang D, et al. Automotive radars: A review of signal processing techniques[J]. IEEE Signal Processing Magazine, 2017, 34(2): 22–35. DOI: 10.1109/MSP.2016.2628914[3] Kronauge M and Rohling H. New chirp sequence radar waveform[J]. IEEE Transactions on Aerospace and Electronic Systems, 2014, 50(4): 2870–2877. DOI: 10.1109/TAES.2014.120813[4] Wu S G, Decker S, Chang P, et al. Collision sensing by stereo vision and radar sensor fusion[J]. IEEE Transactions on Intelligent Transportation Systems, 2009, 10(4): 606–614. DOI: 10.1109/TITS.2009.2032769[5] Gresham I, Jain N, Budka T, et al. A compact manufacturable 76–77 GHz radar module for commercial ACC applications[J]. IEEE Transactions on Microwave Theory and Techniques, 2001, 49(1): 44–58. DOI: 10.1109/22.899961[6] Tsang S H, Hall P S, Hoare E D, et al. Advance path measurement for automotive radar applications[J]. IEEE Transactions on Intelligent Transportation Systems, 2006, 7(3): 273–281. DOI: 10.1109/TITS.2006.880614[7] Guo Kun-Yi, Hoare E G, Jasteh D, et al. Road edge recognition using the stripe Hough transform from millimeter-wave radar images[J]. IEEE Transactions on Intelligent Transportation Systems, 2015, 16(2): 825–833. DOI: 10.1109/TITS.2014.2342875[8] Mao X S, Inoue D, Matsubara H, et al. Demonstration of in-car doppler laser radar at 1.55 μm for range and speed measurement[J]. IEEE Transactions on Intelligent Transportation Systems, 2013, 14(2): 599–607. DOI: 10.1109/TITS.2012.2230325[9] Lee J E, Lim H S, Jeong S H, et al. Enhanced iron-tunnel recognition for automotive radars[J]. IEEE Transactions on Vehicular Technology, 2016, 65(6): 4412–4418. DOI: 10.1109/TVT.2015.2460992[10] Kellner D, Barjenbruch M, Klappstein J, et al. Tracking of extended objects with high-resolution doppler radar[J]. IEEE Transactions on Intelligent Transportation Systems, 2016, 17(5): 1341–1353. DOI: 10.1109/TITS.2015.2501759[11] Wang X, Xu L H, Sun H B, et al. On-road vehicle detection and tracking using MMW radar and monovision fusion[J]. IEEE Transactions on Intelligent Transportation Systems, 2016, 17(7): 2075–2084. DOI: 10.1109/TITS.2016.2533542[12] Wang H N, Huang Y W, and Chung S J. Spatial diversity 24-GHz FMCW radar with ground effect compensation for automotive application[J]. IEEE Transactions on Vehicular Technology, 2017, 66(2): 965–973. DOI: 10.1109/TVT.2016.2565608[13] Askeland S A and Ekman T. Tracking with a high-resolution 2D spectral estimation based automotive radar[J]. IEEE Transactions on Intelligent Transportation Systems, 2015, 16(5): 2418–2423. DOI: 10.1109/TITS.2015.2407571[14] Lee M S and Kim Y H. Design and performance of a 24-GHz switch-antenna array FMCW radar system for automotive applications[J]. IEEE Transactions on Vehicular Technology, 2010, 59(5): 2290–2297. DOI: 10.1109/TVT.2010.2045665[15] Hu C X, Liu Y M, Meng H D, et al. Randomized switched antenna array FMCW radar for automotive applications[J]. IEEE Transactions on Vehicular Technology, 2014, 63(8): 3624–3641. DOI: 10.1109/TVT.2014.2308895[16] Shirakawa K. PRISM: An in-vehicle CPU-oriented novel azimuth estimation technique for electronic-scan 76-GHz adaptive-cruise-control radar system[J]. IEEE Transactions on Intelligent Transportation Systems, 2008, 9(3): 451–462. DOI: 10.1109/TITS.2008.922979[17] Dudek M, Nasr I, Bozsik G, et al. System analysis of a phased-array radar applying adaptive beam-control for future automotive safety applications[J]. IEEE Transactions on Vehicular Technology, 2015, 64(1): 34–47. DOI: 10.1109/TVT.2014.2321175[18] Gambi E, Chiaraluce F, and Spinsante S. Chaos-based radars for automotive applications: Theoretical issues and numerical simulation[J]. IEEE Transactions on Vehicular Technology, 2008, 57(6): 3858–3863. DOI: 10.1109/TVT.2008.921632[19] Cheng P, Zhang F, Chen J M, et al. A distributed TDMA scheduling algorithm for target tracking in ultrasonic sensor networks[J]. IEEE Transactions on Industrial Electronics, 2013, 60(9): 3836–3845. DOI: 10.1109/TIE.2012.2208439[20] Imana E Y, Yang T, and Reed J H. Addressing a neighboring-channel interference from high-powered radar[J]. IEEE Transactions on Vehicular Technology, 2016, 65(5): 2872–2882. DOI: 10.1109/TVT.2015.2442217[21] Richards M A. Fundamentals of Radar Signal Processing[M]. New York: McGraw-Hill, 2005.[22] Shechtman Y, Eldar Y C, Cohen O, et al. Phase retrieval with application to optical imaging: A contemporary overview[J]. IEEE Signal Processing Magazine, 2015, 32(3): 87–109. DOI: 10.1109/MSP.2014.2352673 -
Proportional views

- Publishing Ethics
- Journal Insights
- Abstracting & Indexing
- Peer Review Policies
- Guide for Authors
- Conference
- ISSN 2095-283X (Print)ISSN 2097-339X (Online)
- CN 10-1030/TN
- CODEN LXEUAO
About Journal
- Sponsor: China Radio Detection and Ranging Industry Association (CRIA)
- Phone: 010-58887062
- Email:radars@aircas.ac.cn
- Publisher: Leida Xuebao Bianjibu (Editorial office of the Journal of Radars)
Contacts Us

京ICP备20021838号-14
Supported by: Beijing Renhe Information Technology Co. Ltd

Export File
Citation
Format
Content
 DownLoad:
DownLoad:

- Figure 1. Conceptual sketch of reducing the effect of sidelobes
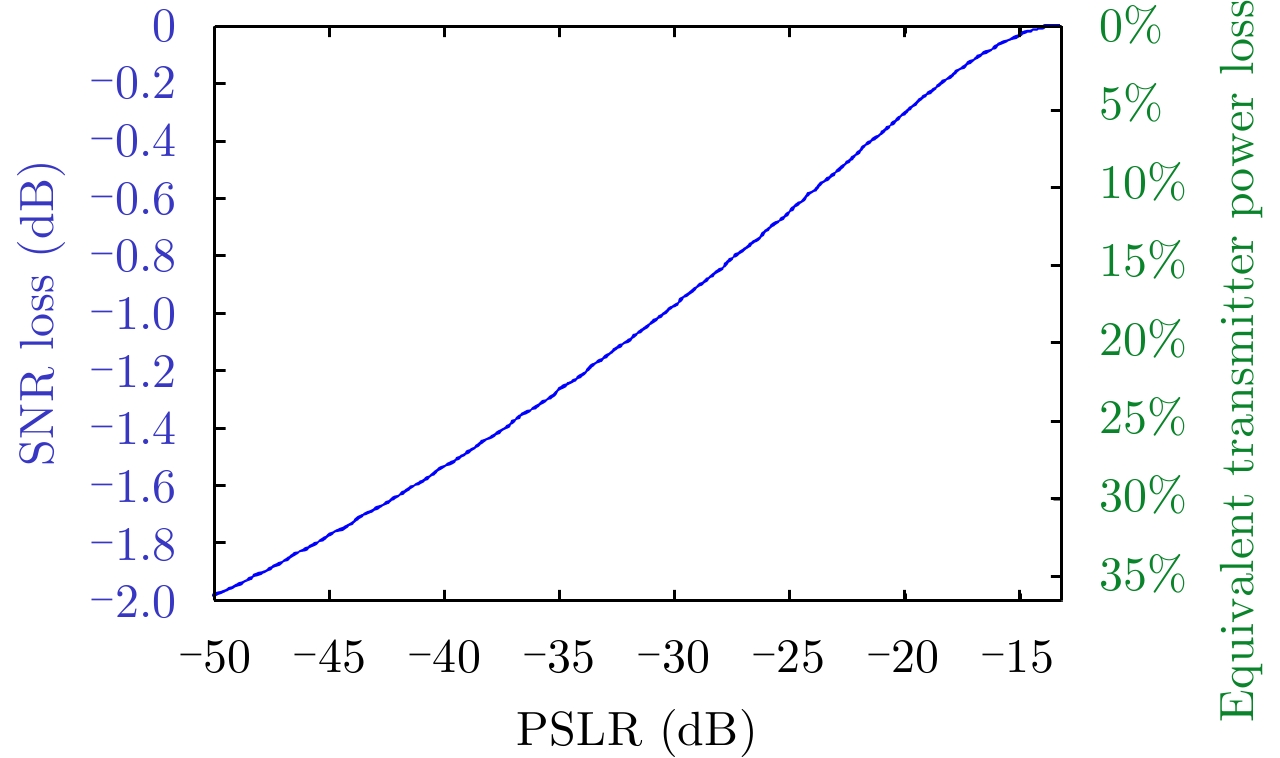
- Figure 2. SNR loss and equivalent transmitter power loss versus PSLR in the window processing
- Figure 3. Schematic of the proposed radar
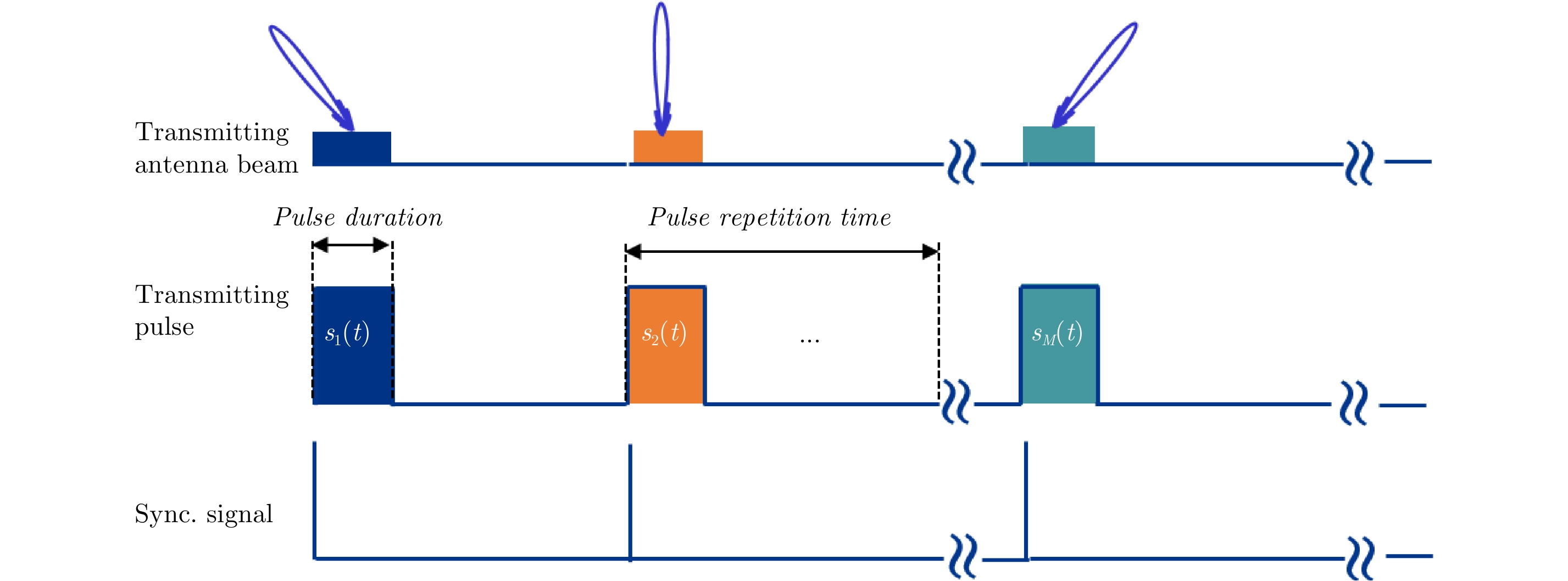
- Figure 4. System timing and synchronization diagram of the proposed radar
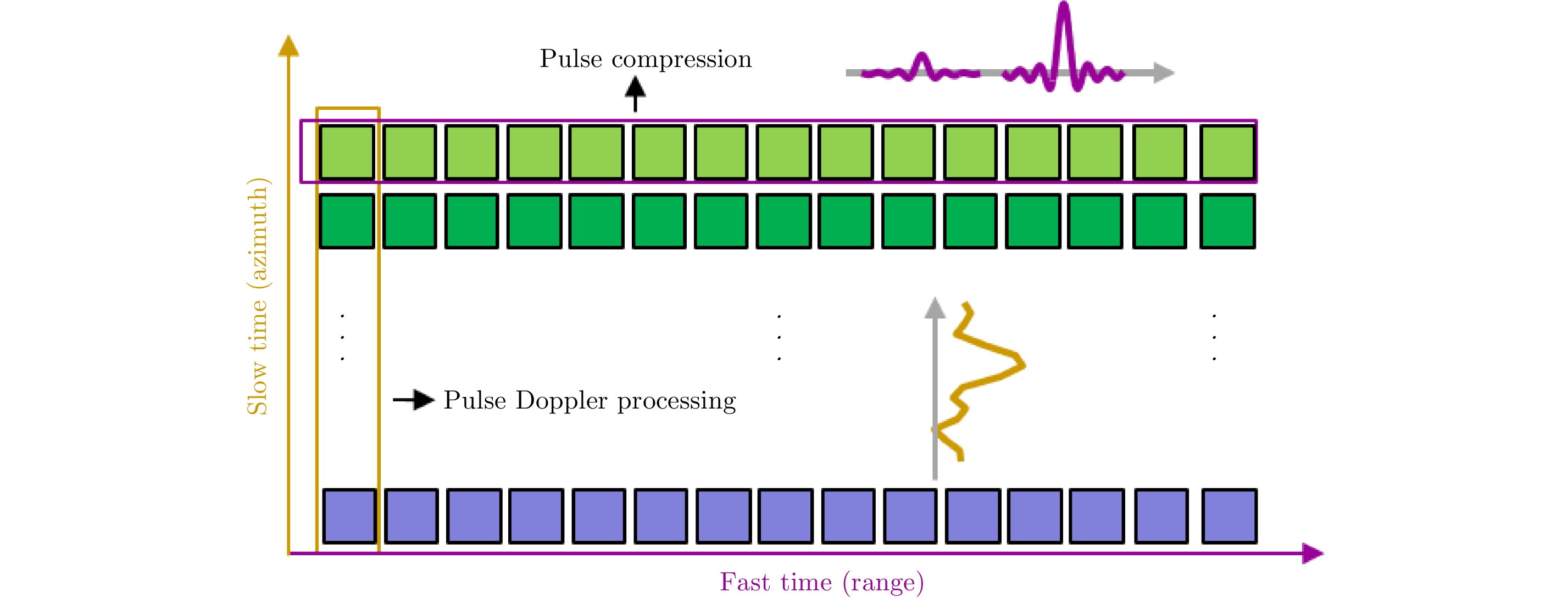
- Figure 5. Conceptual sketch of signal processing for the proposed radar
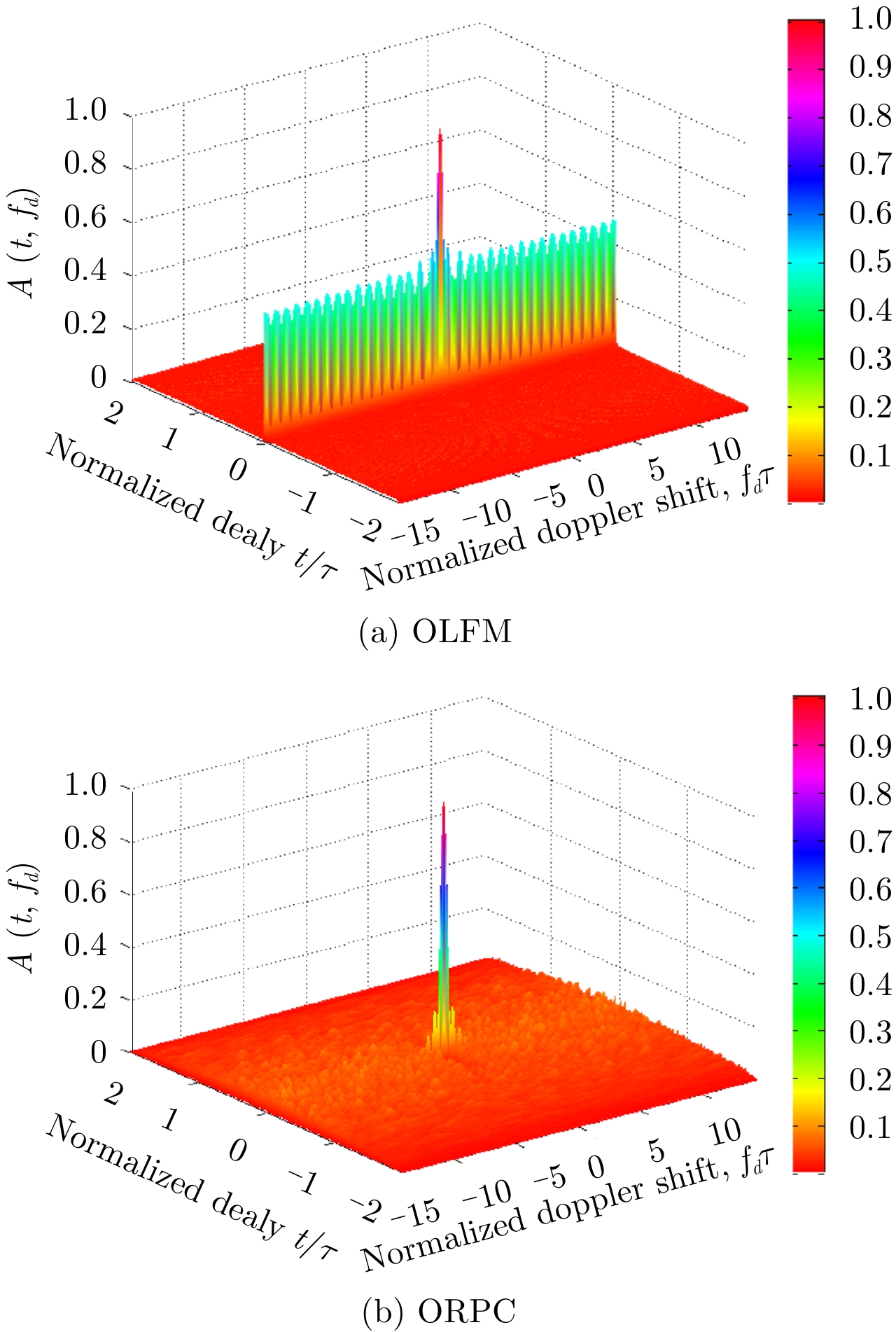
- Figure 7. Ambiguity functions
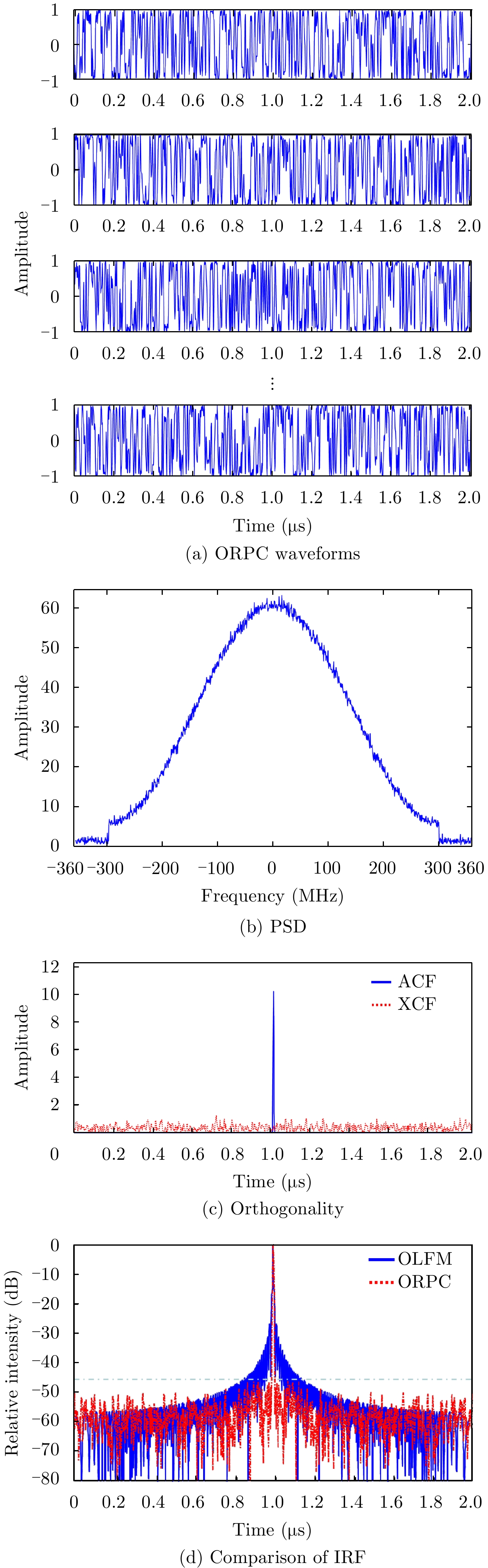
- Figure 6. The performance of the proposed waveforms
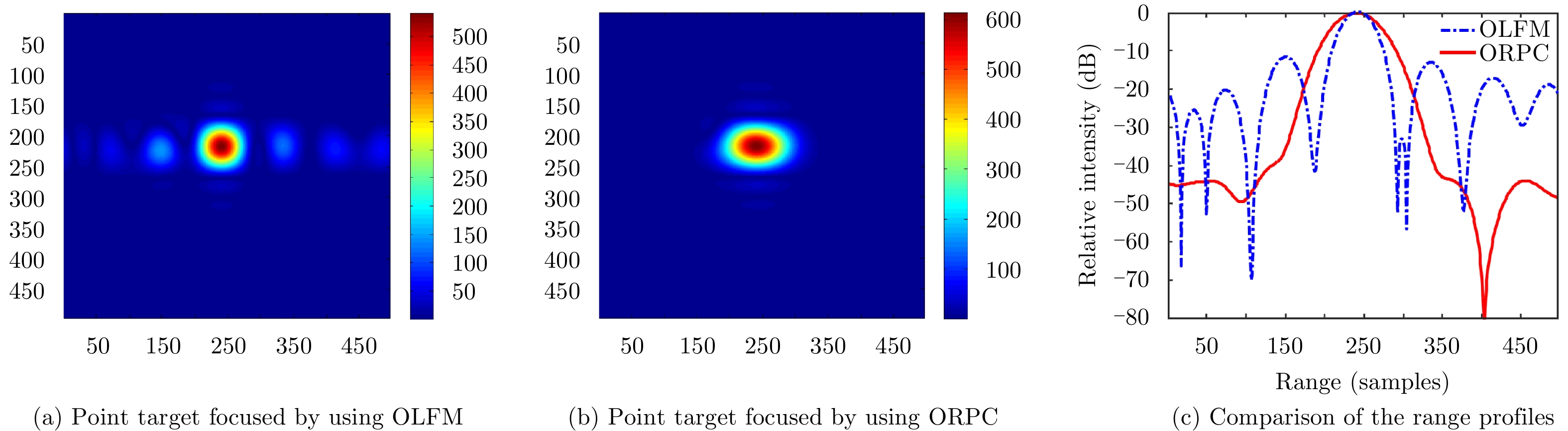
- Figure 8. Point target focused by using OLFM (a), and ORPC (b). Comparison of the range profiles were showed in (c).
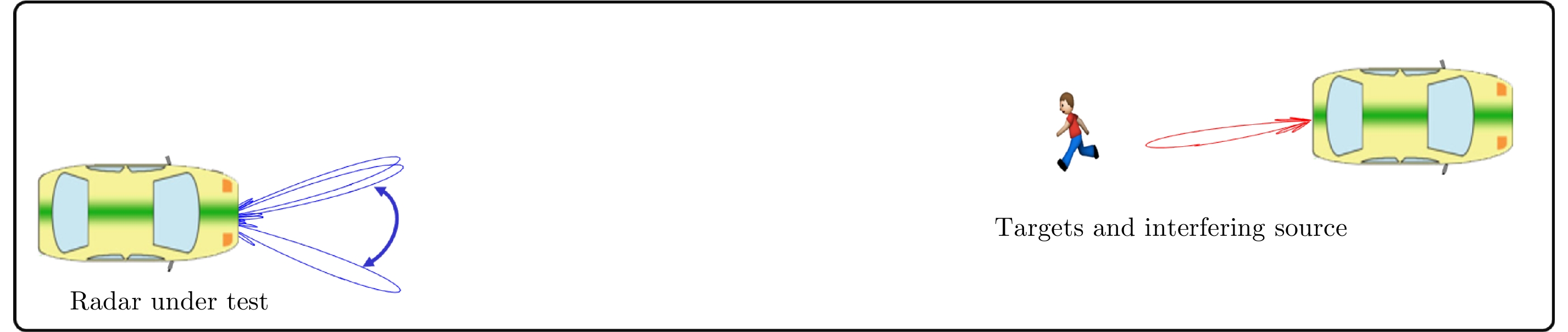
- Figure 9. A representative scenario designed for experiment
- Figure 10. High-resolution imaging of range, azimuth and velocity for the targets.
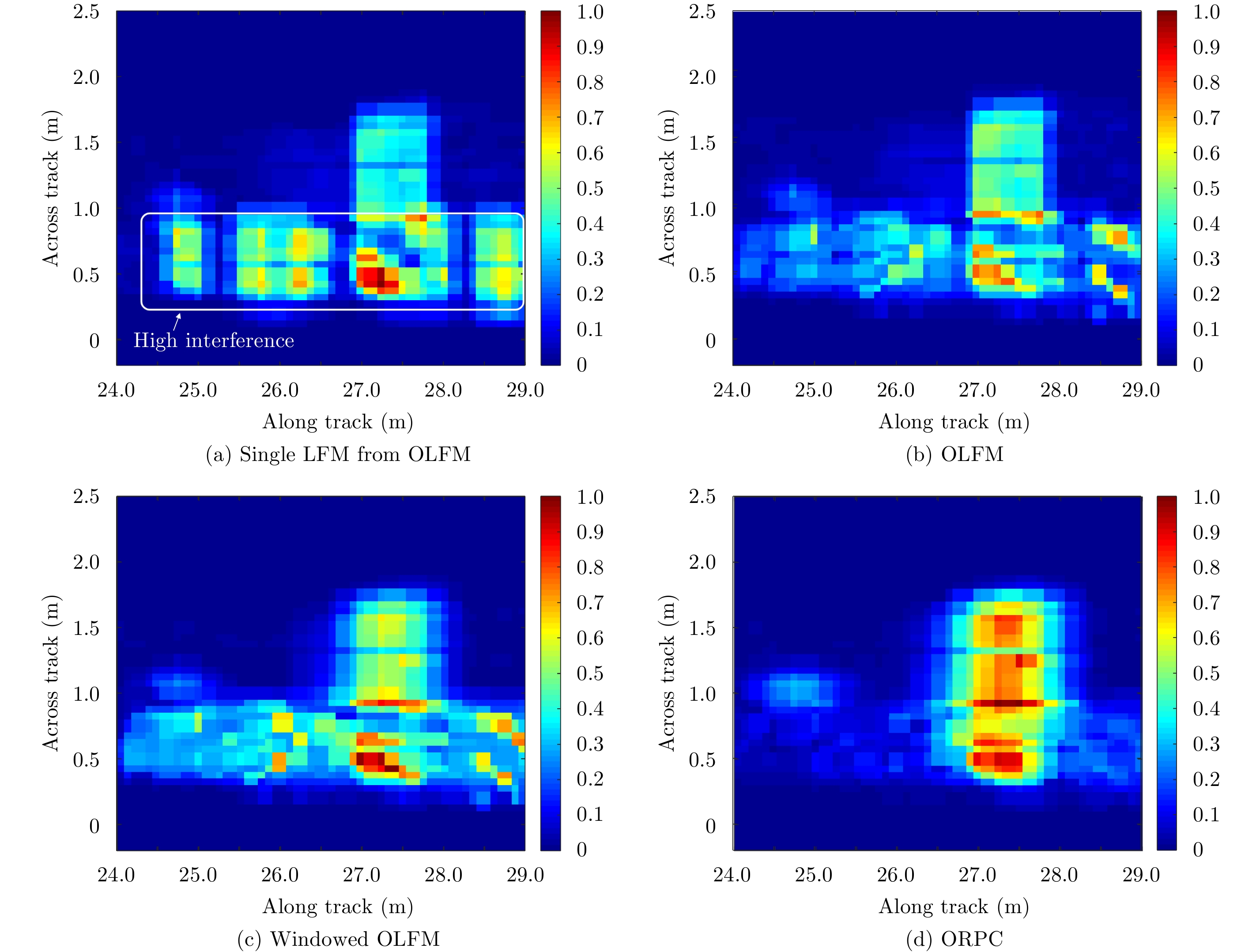
- Figure 11. Results on the presences of high interferences by using single LFM from OLFM (a), OLFM (b), Windowed OLFM (c), and ORPC (d), respectively.