
 Submit Manuscript
Submit Manuscript Peer Review
Peer Review Editor Work
Editor Work- Home
- Articles & Issues
-
Data
- Dataset of Radar Detecting Sea
- SAR Dataset
- SARGroundObjectsTypes
- SARMV3D
- AIRSAT Constellation SAR Land Cover Classification Dataset
- 3DRIED
- UWB-HA4D
- LLS-LFMCWR
- FAIR-CSAR
- MSAR
- SDD-SAR
- FUSAR
- SpaceborneSAR3Dimaging
- Sea-land Segmentation
- SAR Multi-domain Ship Detection Dataset
- SAR-Airport
- Hilly and mountainous farmland time-series SAR and ground quadrat dataset
- SAR images for interference detection and suppression
- HP-SAR Evaluation & Analytical Dataset
- GDHuiYan-ATRNet
- Multi-System Maritime Low Observable Target Dataset
- DatasetinthePaper
- DatasetintheCompetition
- Report
- Course
- About
- Publish
- Editorial Board
- Chinese

| Citation: | Li Yangyang, Li Wen, Yi Wei, Kong Lingjiang. A Distributed Asynchronous Recursive Filtering Fusion Algorithm via DP-TBD[J]. Journal of Radars, 2018, 7(2): 254-262. doi: 10.12000/JR17057

|
A Distributed Asynchronous Recursive Filtering Fusion Algorithm via DP-TBD
DOI: 10.12000/JR17057 CSTR: 32380.14.JR17057
-
Abstract
In this paper, we address target tracking problems by the use of multiple sensors via the Dynamic Programming (DP)-based Track-Before-Detect (TBD) method. Generally, DP-TBD is a grid-based method that estimates target trajectories by searching all the physically admissible paths in a determinate discrete state space. However, this multi-frame detection algorithm provides plot sequences without filtering or smoothing. With the growing complexity of the battle field environment, single radar based on DP-TBD cannot achieve satisfactory results when the Signal-to-Noise Ratio (SNR) is low. Besides, it is very difficult to fuse plot sequences from different radars because they contain no state error covariance matrix. Furthermore, various radars always contain asynchronous data due to the diversity of sampling times and communication delays. To alleviate these problems, we propose a distributed asynchronous recursive filtering fusion (Dynamic Programming Fuison, DPF) algorithm based on DP-TBD, which is divided into two steps. In the first step, we propose an iterative filter algorithm via DP-TBD. Then, we convert the asynchronous evaluation data into synchronous data and implement several distributed fusion algorithms to estimate the target state. Simulation results show that the proposed algorithm can correctly estimate target trajectories and significantly enhance tracking accuracy compared to solo radar. In addition, this algorithm can decrease the track loss rate and calculation burden. -

-
References
[1] Bar-Shalom Y and Li Xiao-rong. Multitarget-Multisensor Tracking: Principles and Techniques[M]. Storrs, CT: YBS, 1995.[2] Bar-Shalom Y and Blair W D. Multitarget-Multisensor Tracking: Applications and Advances, Vol. III[M]. Norwood, MA: Artech House, 2000.[3] Bar-Shalom Y, Daum F, and Huang J. The probabilistic data association filter[J]. IEEE Control Systems, 2009, 29(6): 82–100. DOI: 10.1109/MCS.2009.934469[4] Davey S J and Rutten M G. A comparison of three algorithms for tracking dim targets[C]. Proceedings of 2007 IEEE Information, Decision and Control, Adelaide, Australia, 2007: 342–347.[5] Barniv Y. Dynamic programming solution for detecting dim moving targets[J]. IEEE Transactions on Aerospace and Electronic Systems, 1985, AES-21(1): 144–156. DOI: 10.1109/TAES.1985.310548[6] Barniv Y and Kella O. Dynamic programming solution for detecting dim moving targets part II: Analysis[J]. IEEE Transactions on Aerospace and Electronic Systems, 1987, AES-23(6): 776–788. DOI: 10.1109/TAES.1987.310914[7] Arnold J, Shaw S W, and Pasternack H. Efficient target tracking using dynamic programming[J]. IEEE Transactions on Aerospace and Electronic Systems, 1993, 29(1): 44–56. DOI: 10.1109/7.249112[8] Tonissen S M and Evans R J. Peformance of dynamic programming techniques for Track-Before-Detect[J]. IEEE Transactions on Aerospace and Electronic Systems, 1996, 32(4): 1440–1451. DOI: 10.1109/7.543865[9] Johnston L A and Krishnamurthy V. Performance analysis of a dynamic programming track before detect algorithm[J]. IEEE Transactions on Aerospace and Electronic Systems, 2002, 38(1): 228–242. DOI: 10.1109/7.993242[10] Yi Wei, Morelande M R, Kong Ling-jiang, et al. An efficient multi-frame track-before-detect algorithm for multi-target tracking[J]. IEEE Journal of Selected Topics in Signal Processing, 2013, 7(3): 421–434. DOI: 10.1109/JSTSP.2013.2256415[11] Buzzi S, Lops M, Venturino L, et al. Track-before-detect procedures in a multi-target environment[J]. IEEE Transactions on Aerospace and Electronic Systems, 2008, 44(3): 1135–1150. DOI: 10.1109/TAES.2008.4655369[12] Wallace W R. The use of track-before-detect in pulse-Doppler radar[C]. Proceedings of RADAR 2002, Edinburgh, UK, 2002: 315–319.[13] Buzzi S, Lops M, and Venturino L. Track-before-detect procedures for early detection of moving target from airborne radars[J]. IEEE Transactions on Aerospace and Electronic Systems, 2005, 41(3): 937–954. DOI: 10.1109/TAES.2005.1541440[14] Orlando D, Ricci G, and Bar-Shalom Y. Track-before-detect algorithms for targets with Kinematic constraints[J]. IEEE Transactions on Aerospace and Electronic Systems, 2011, 47(3): 1837–1849. DOI: 10.1109/TAES.2011.5937268[15] Grossi E, Lops M, and Venturino L. A Novel dynamic programming algorithm for Track-Before-Detect in radar systems[J]. IEEE Transactions on Signal Processing, 2013, 61(10): 2608–2619. DOI: 10.1109/TSP.2013.2251338[16] Yi Wei, Kong Ling-jiang, and Yang Jian-yu. Thresholding process based dynamic programming Track-before-detect algorithm[J]. IEICE Transactions on Communications, 2013, E96.B(1): 291–300. DOI: 10.1587/transcom.E96.B.291[17] Liu Rui, Yi Wei, Kong Ling-jiang, et al.. Recursive filtering for target tracking in multi-frame Track-Before-Detect[C]. Proceedings of the 2014 17th International Conference on Information Fusion (FUSION), Salamanca, Spain, 2014: 1–6.[18] Fang Zi-cheng, Yi Wei, and Kong Ling-jiang. A tracking approach for low observable target using plot-sequences of multi-frame detection[C]. Proceedings of the 2016 19th International Conference on Information Fusion, Heidelberg, Germany, 2016: 1427–1433.[19] Govaers F, Rong Yang, Chee L H, et al. Track-before-detect in distributed sensor applications[J]. EURASIP Journal on Advances in Signal Processing, 2011, 2011: 20. DOI: 10.1186/1687-6180-2011-20[20] Gao Xin-bo, Chen Jin-guang, Tao Da-cheng, et al. Multi-sensor centralized fusion without measurement noise covariance by variational Bayesian approximation[J]. IEEE Transactions on Aerospace and Electronic Systems, 2011, 47(1): 718–727. DOI: 10.1109/TAES.2011.5705702[21] Ma Jing and Sun Shu-li. Centralized fusion estimators for multisensor systems with random sensor delays, multiple packet dropouts and uncertain observations[J]. IEEE Sensors Journal, 2013, 13(4): 1228–1235. DOI: 10.1109/JSEN.2012.2227995[22] Zhai Yan, Yeary M B, Havlicek J P, et al. A new centralized sensor fusion-tracking methodology based on particle filtering for power-aware systems[J]. IEEE Transactions on Instrumentation and Measurement, 2008, 57(10): 2377–2387. DOI: 10.1109/TIM.2008.919009[23] Mohammadi A and Asif A. Distributed particle filter implementation with intermittent/irregular consensus convergence[J]. IEEE Transactions on Signal Processing, 2013, 61(10): 2572–2587. DOI: 10.1109/TSP.2013.2245123[24] Zhao Tong and Nehorai A. Distributed sequential Bayesian estimation of a diffusive source in wireless sensor networks[J]. IEEE Transactions on Signal Processing, 2007, 55(4): 1511–1524. DOI: 10.1109/TSP.2006.889975[25] Üney M, Clark D E, and Julier S J. Distributed fusion of PHD filters via exponential mixture densities[J]. IEEE Journal of Selected Topics in Signal Processing, 2013, 7(3): 521–531. DOI: 10.1109/JSTSP.2013.2257162[26] Guo Yun-fei, Zeng Ze-bing, and Zhao Shang-yu. An amplitude association dynamic programming TBD algorithm with multistatic radar[C]. Proceedings of the 2016 35th Chinese Control Conference, Chengdu, China, 2016: 5076–5079.[27] Talebi H and Hemmatyar A. Asynchronous track-to-track fusion by direct estimation of time of sample in sensor networks[J]. IEEE Sensors Journal, 2014, 14(1): 210–217. DOI: 10.1109/JSEN.2013.2281394[28] Hu Yanyan, Duan Zhansheng, and Zhou Donghua. Estimation fusion with general asynchronous multi-rate sensors[J]. IEEE Transactions on Aerospace and Electronic Systems, 2010, 46(4): 2090–2102. DOI: 10.1109/TAES.2010.5595618[29] Yan L P, Liu B S, and Zhou D H. Asynchronous multirate multisensor information fusion algorithm[J]. IEEE Transactions on Aerospace and Electronic Systems, 2007, 43(3): 1135–1146. DOI: 10.1109/TAES.2007.4383603[30] Wang Yi-min and Li X R. Distributed estimation fusion with unavailable cross-correlation[J]. IEEE Transactions on Aerospace and Electronic Systems, 2012, 48(1): 259–278. DOI: 10.1109/TAES.2012.6129634[31] Julier S J. An empirical study into the use of chernoff information for robust, distributed fusion of Gaussian mixture models[C]. Proceedings of the 2006 9th IEEE International Conference on Information Fusion, Florence, Italy, 2006: 1–8.[32] Aprile A, Grossi E, Lops M, et al.. An application of Track-Before-Detect to sea-clutter rejection: Experimental results based on real data[C]. Proceedings of the 2014 11th European Radar Conference, Rome, Italy, 2014: 505–508.[33] Li Yang-yang, Wang Jing-he, Yi Wei, et al.. A centralized asynchronous fusion algorithm for sensors with different resolution via DP-TBD[C]. Proceedings of 2017 IEEE Radar Conference, Seattle, USA, 2017: 922–927. -
Proportional views

- Publishing Ethics
- Journal Insights
- Abstracting & Indexing
- Peer Review Policies
- Guide for Authors
- Conference
- ISSN 2095-283X (Print)ISSN 2097-339X (Online)
- CN 10-1030/TN
- CODEN LXEUAO
About Journal
- Sponsor: China Radio Detection and Ranging Industry Association (CRIA)
- Phone: 010-58887062
- Email:radars@aircas.ac.cn
- Publisher: Leida Xuebao Bianjibu (Editorial office of the Journal of Radars)
Contacts Us

京ICP备20021838号-14
Supported by: Beijing Renhe Information Technology Co. Ltd

Export File
Citation
Format
Content
 DownLoad:
DownLoad:


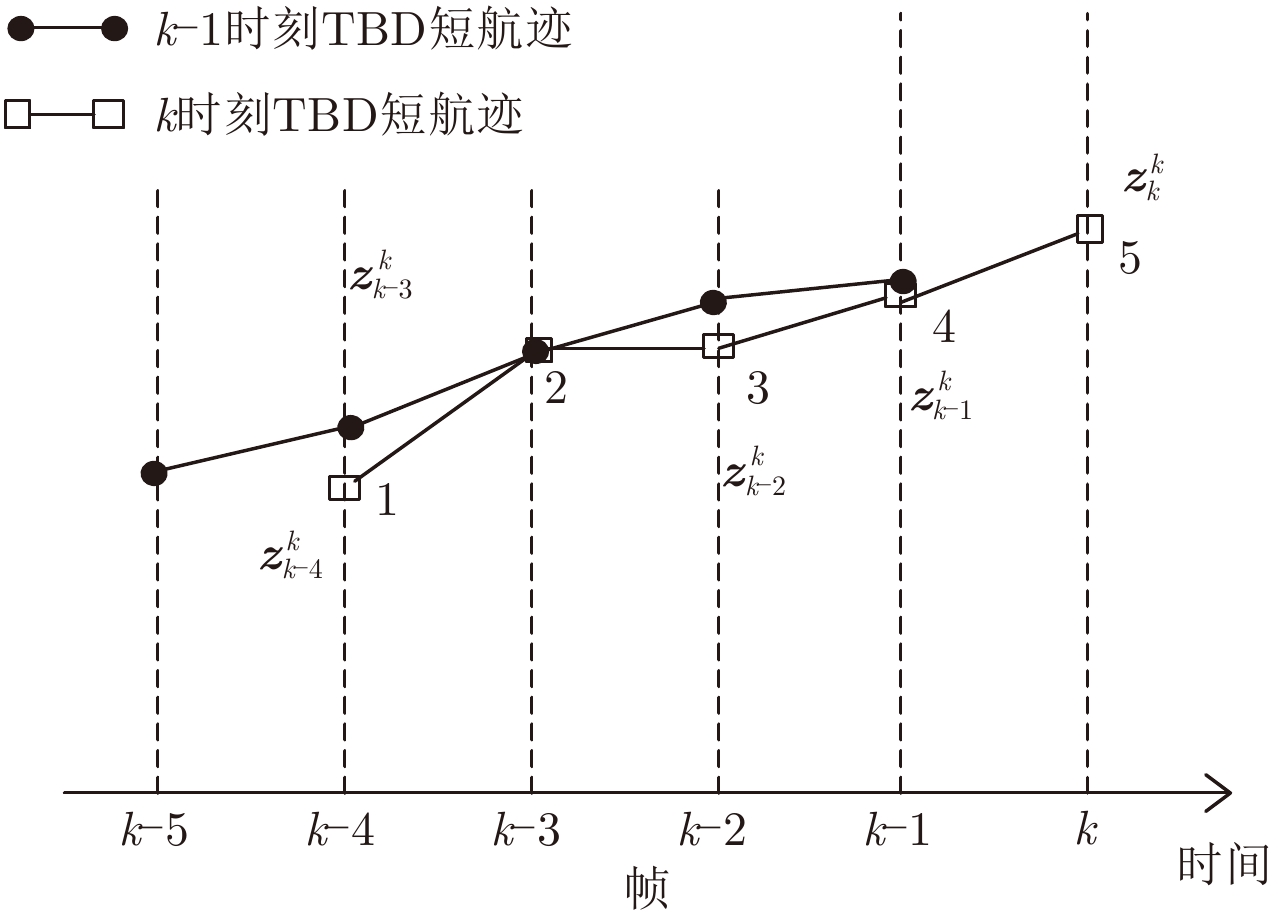
- Figure 1. The relationships of multiple sliding window frames when N=5
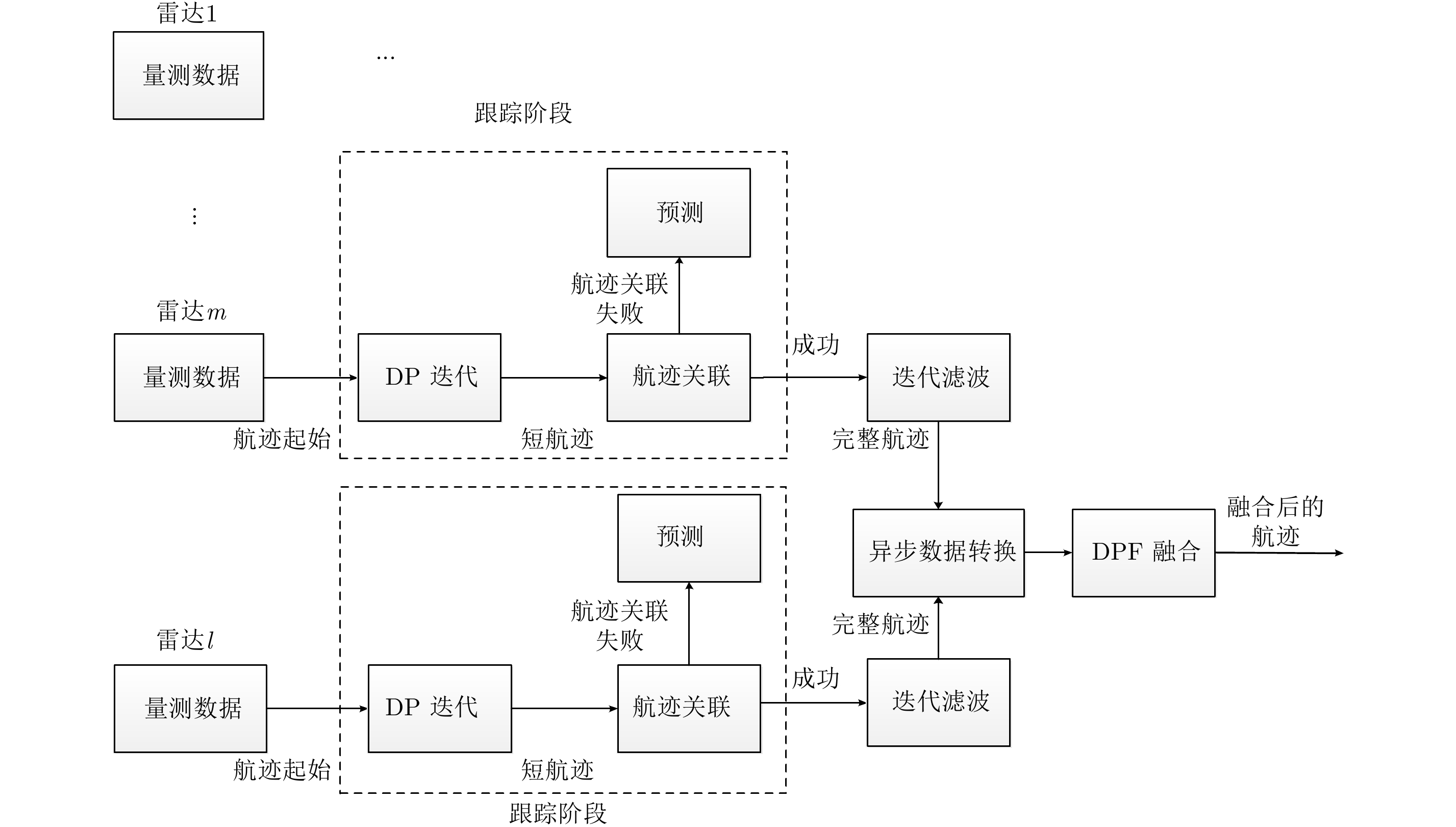
- Figure 2. The detail method flow of DPF algorithm
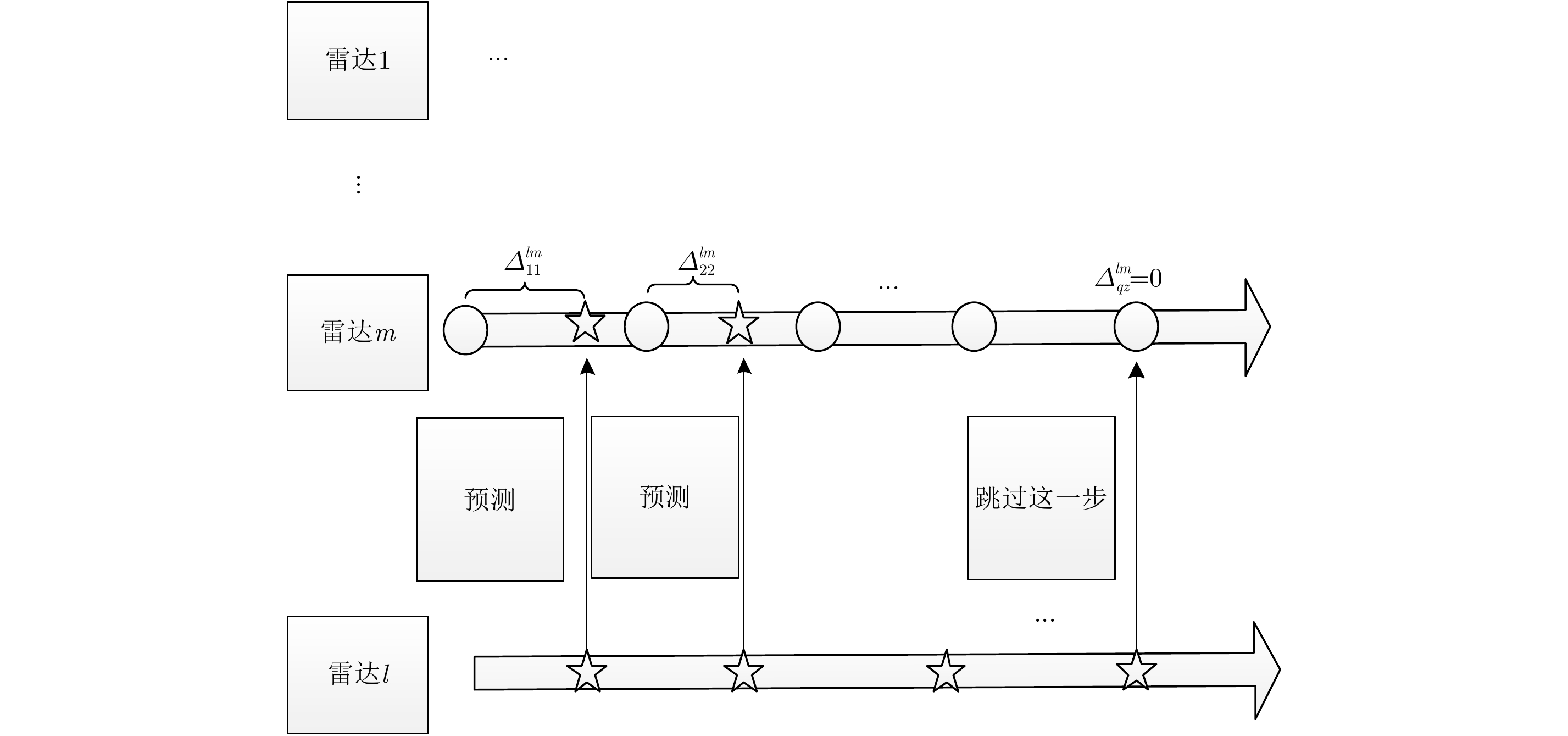
- Figure 3. Asynchronous data conversion figure
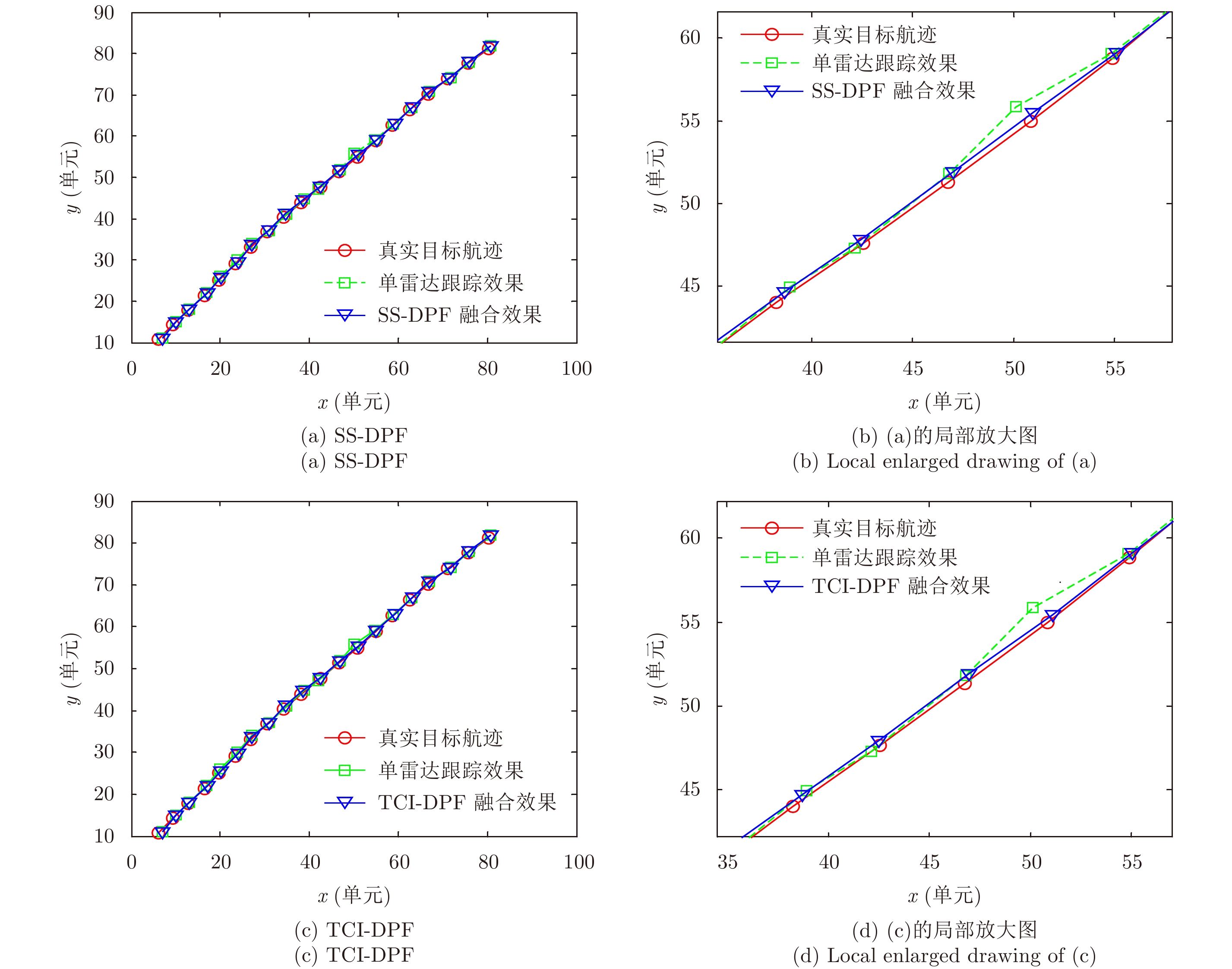
- Figure 4. One time Monte Carlo simulation result when SNR=8
- Figure 5. RMSE from the 1st frame to the 20nd frame
- Figure 6. Track loss rate of DPF algorithm and TDF method from SNR=8 dB to SNR=16 dB