
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
-
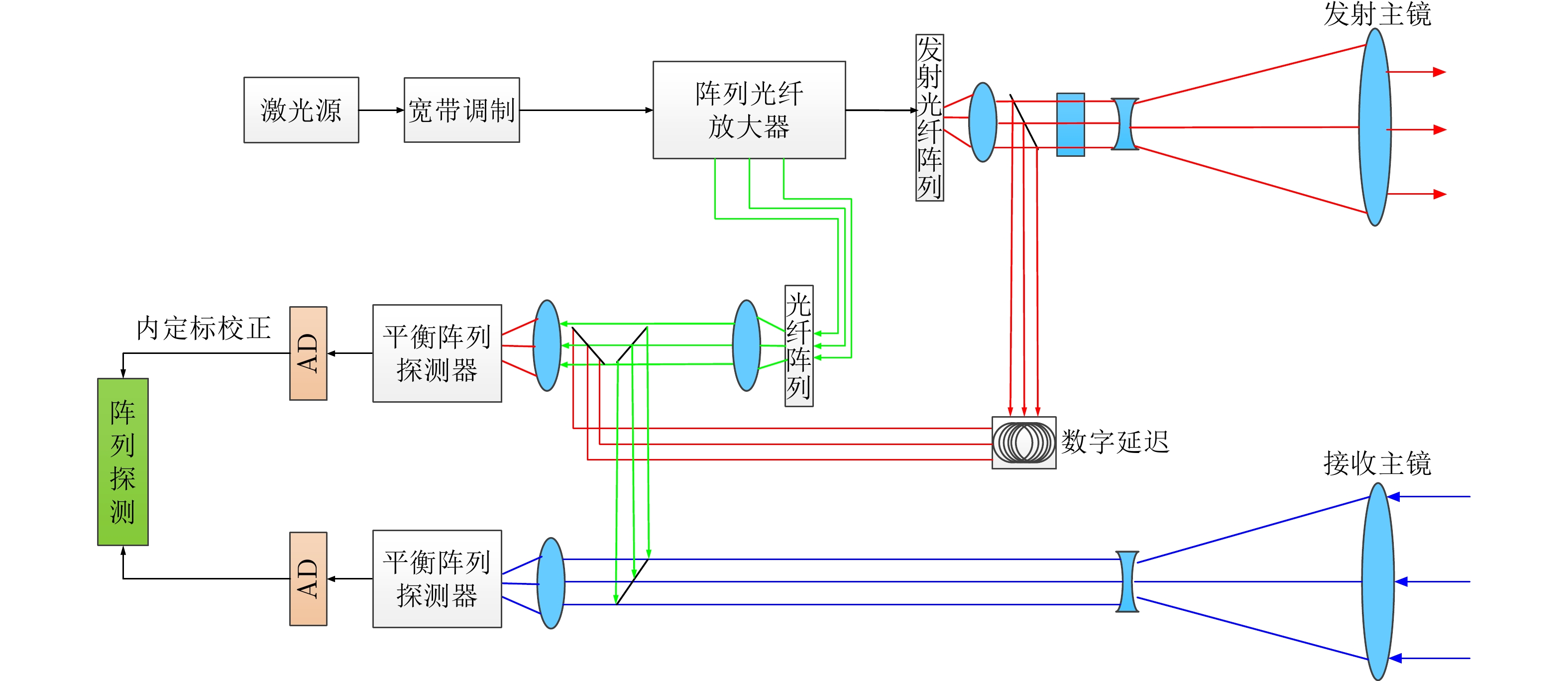
摘要: 激光合成孔径雷达将合成孔径技术应用于激光频段,分辨率不受观测距离的限制,可实现远距离、超高分辨率成像。然而,受激光衍射极限限制,观测视场制约着激光合成孔径雷达对地观测实际应用。该文提出一种阵列激光合成孔径雷达技术体制,通过大功率阵列发射、阵列平衡探测接收、逐脉冲动态内定标实现了激光多路相干收发,成倍地扩大了成像视场。地面转台成像试验表明,成像分辨率优于3 cm(距离)×1 cm(方位),该项技术可为激光合成孔径雷达对地观测应用奠定基础。Abstract: By extending synthetic aperture technology from the microwave band to the laser wavelength, Synthetic Aperture Ladar (SAL) has long-distance imaging and extremely high spatial resolution independent of the target distance. Presently, the small field of view is the key constraint in SAL ground observation because of the laser diffraction limitation. In this paper, an array SAL technology is proposed. With high-power array transmission, array-balanced detection, and pulse-wise dynamic internal calibration, a multichannel coherent laser transceiver is realized. Meanwhile, the field of view has multiplied. The results of turntable experiments show that the imaging resolution is better than 3 cm (distance) × 1 cm (azimuth). This technology provides a scientific and technical approach to SAL with wider swath imaging in ground observation.
-
Key words:
- Array /
- Synthetic Aperture Ladar (SAL) /
- High resolution /
- Wide swath
-
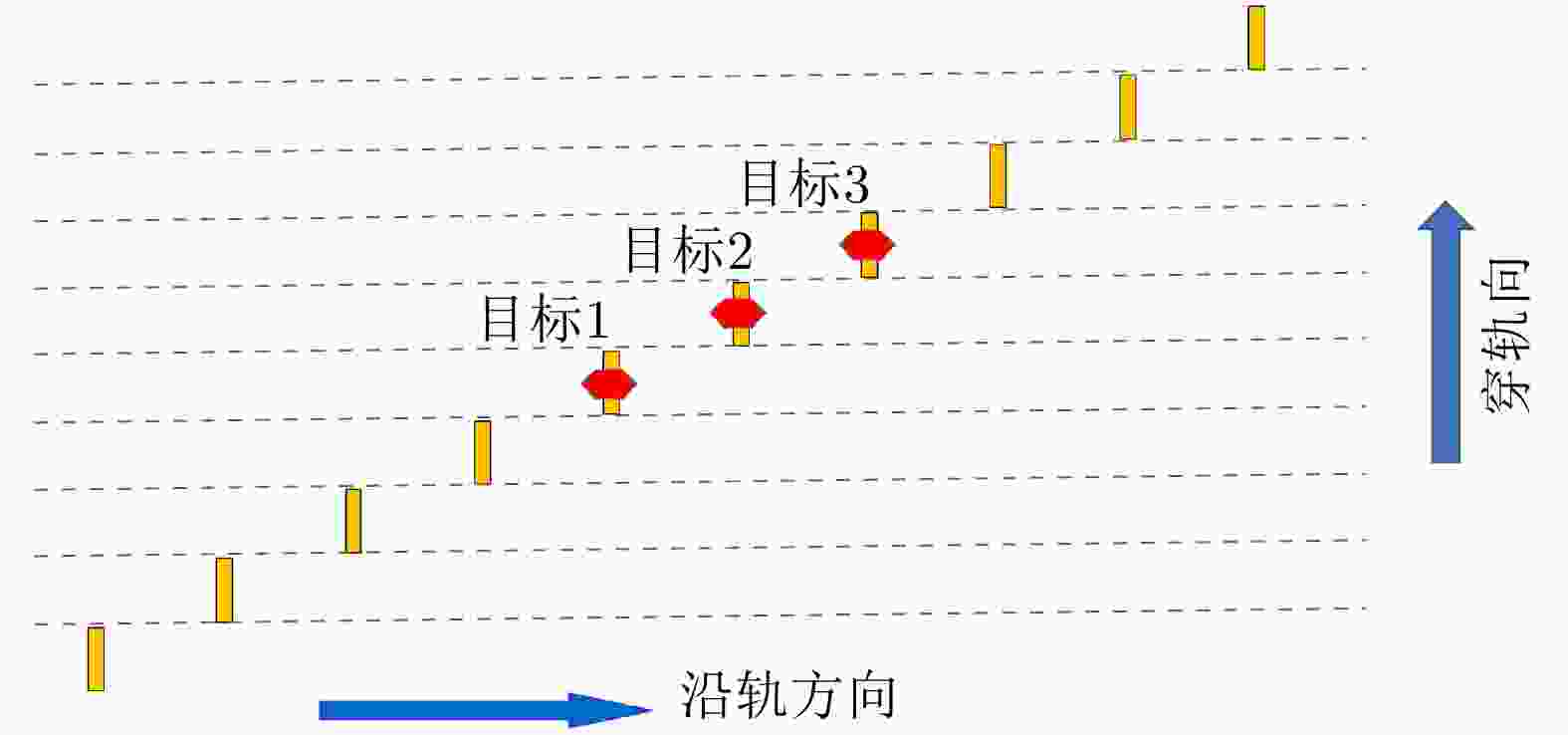
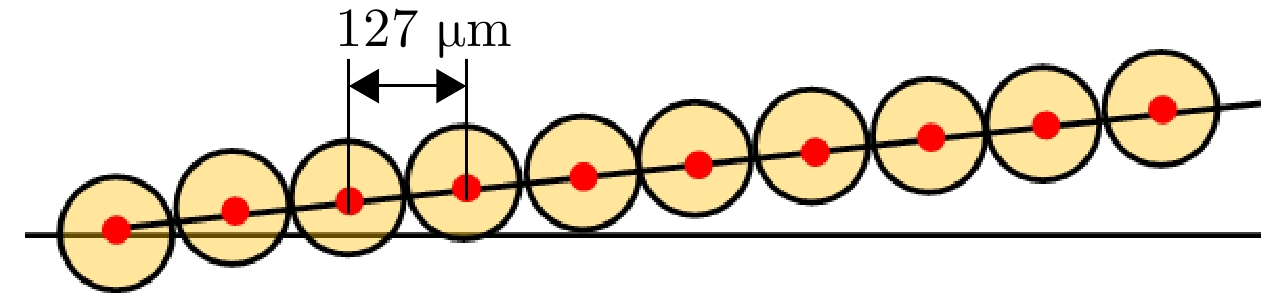
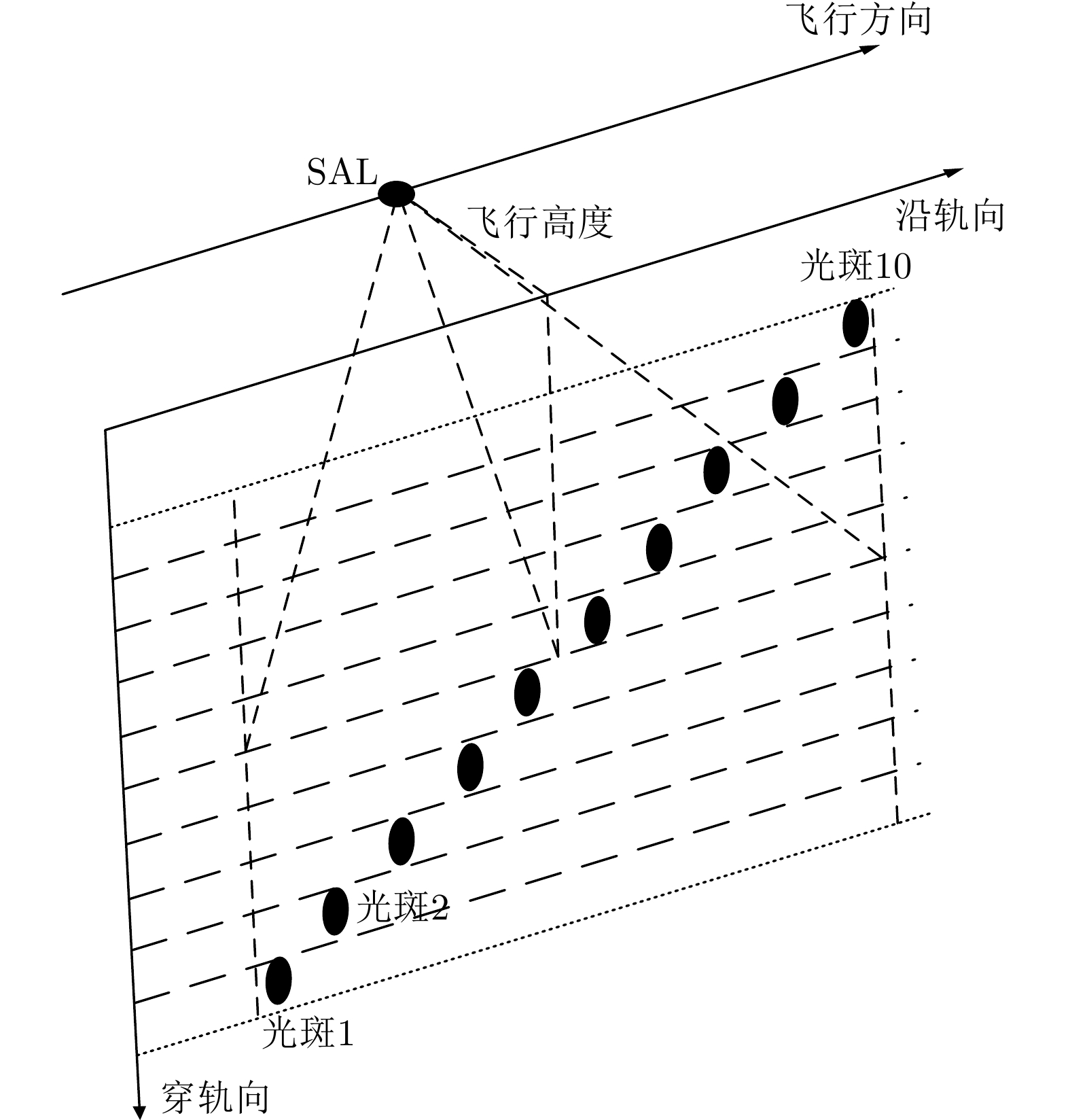
图 5 10路阵列激光远场椭圆光斑分布示意图
Figure 5. Schematic diagram of far field array elliptical laser beam distribution
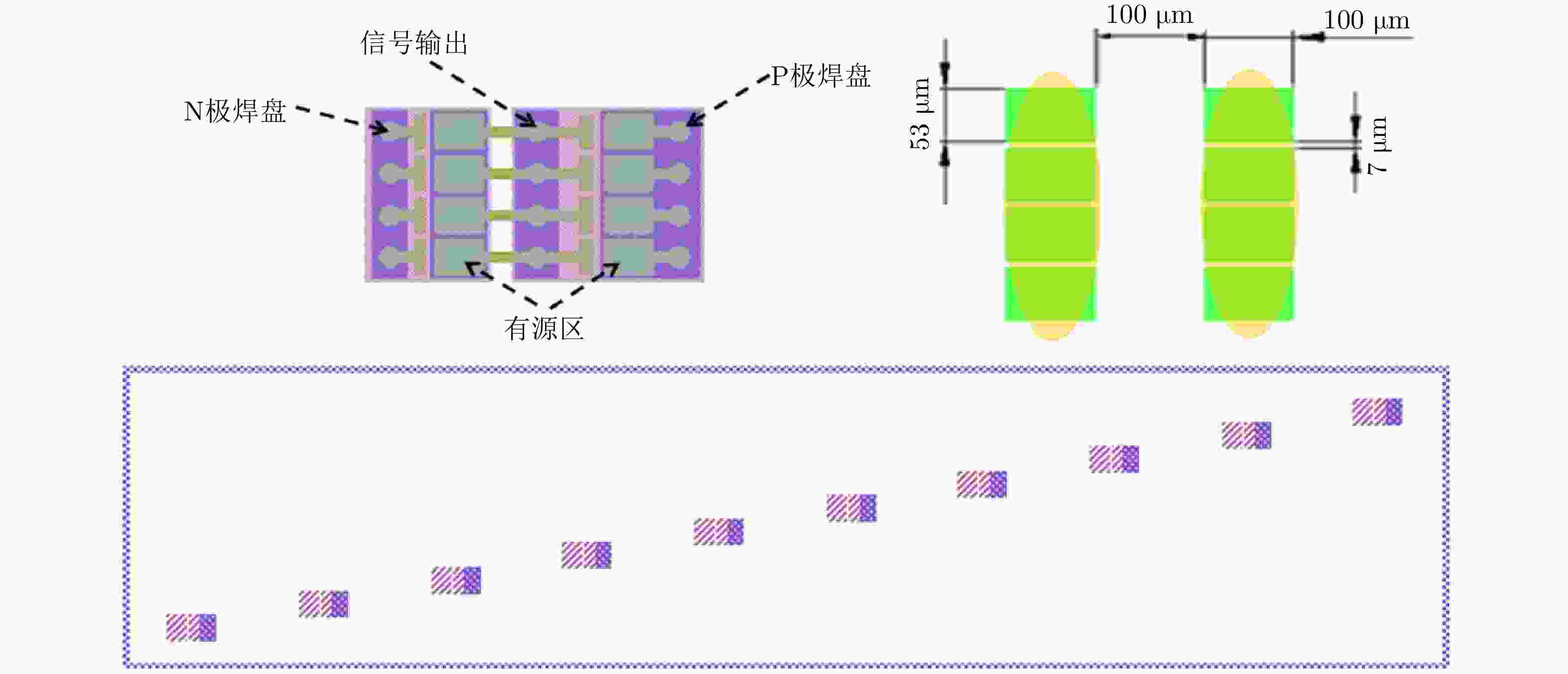
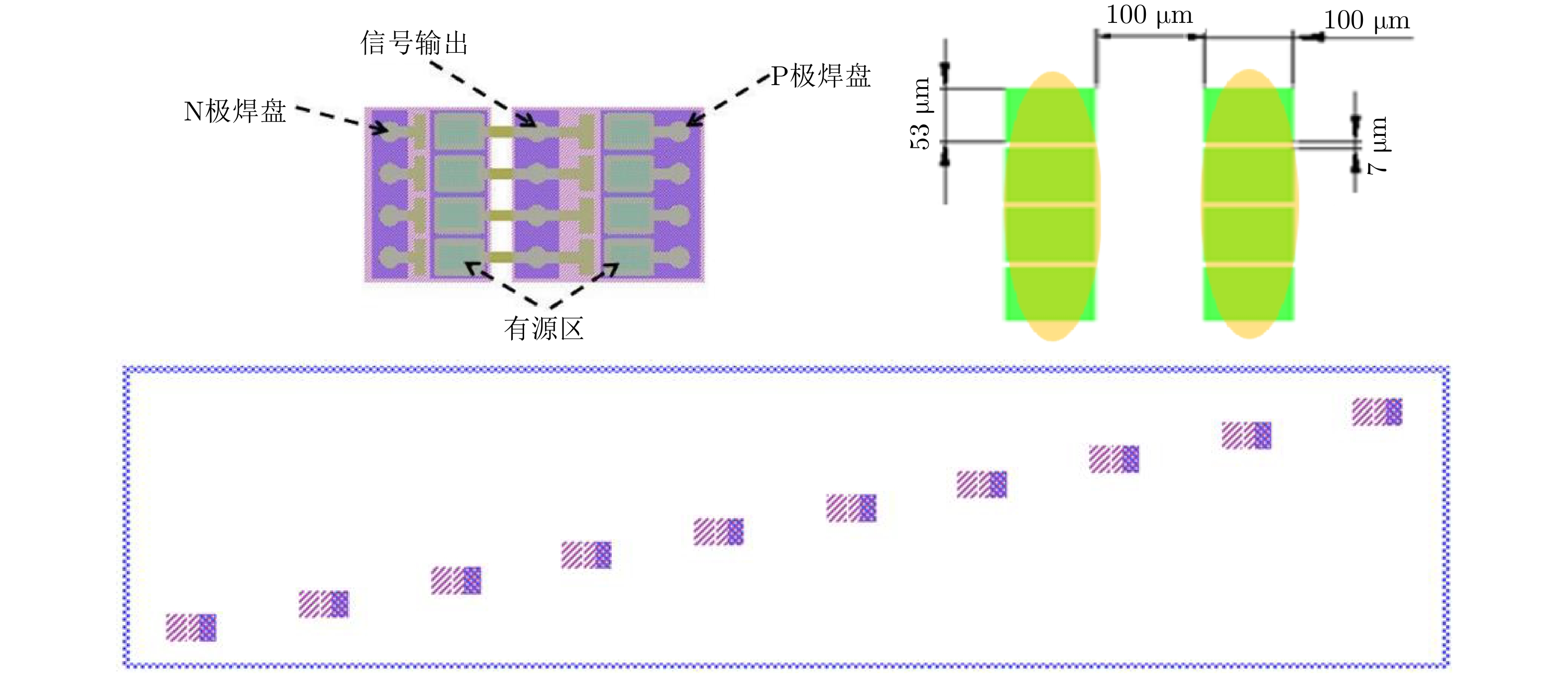
图 6 10路阵列平衡探测单元(每个单元包含4组探测器,共同接收远场1个光斑)
Figure 6. Ten channels array balanced detection unit (each unit contains four detectors, which receive a laser beam from the far field)
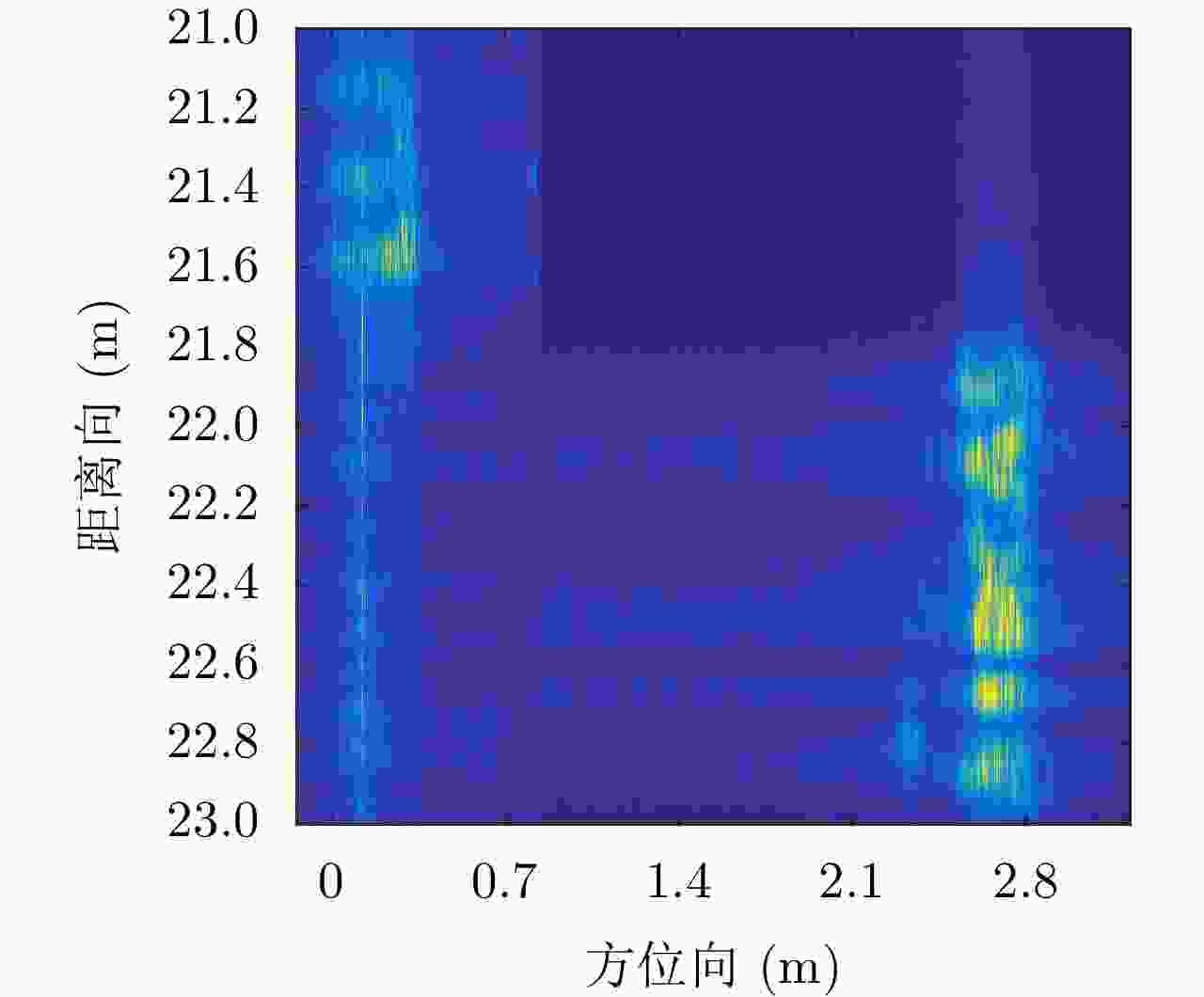
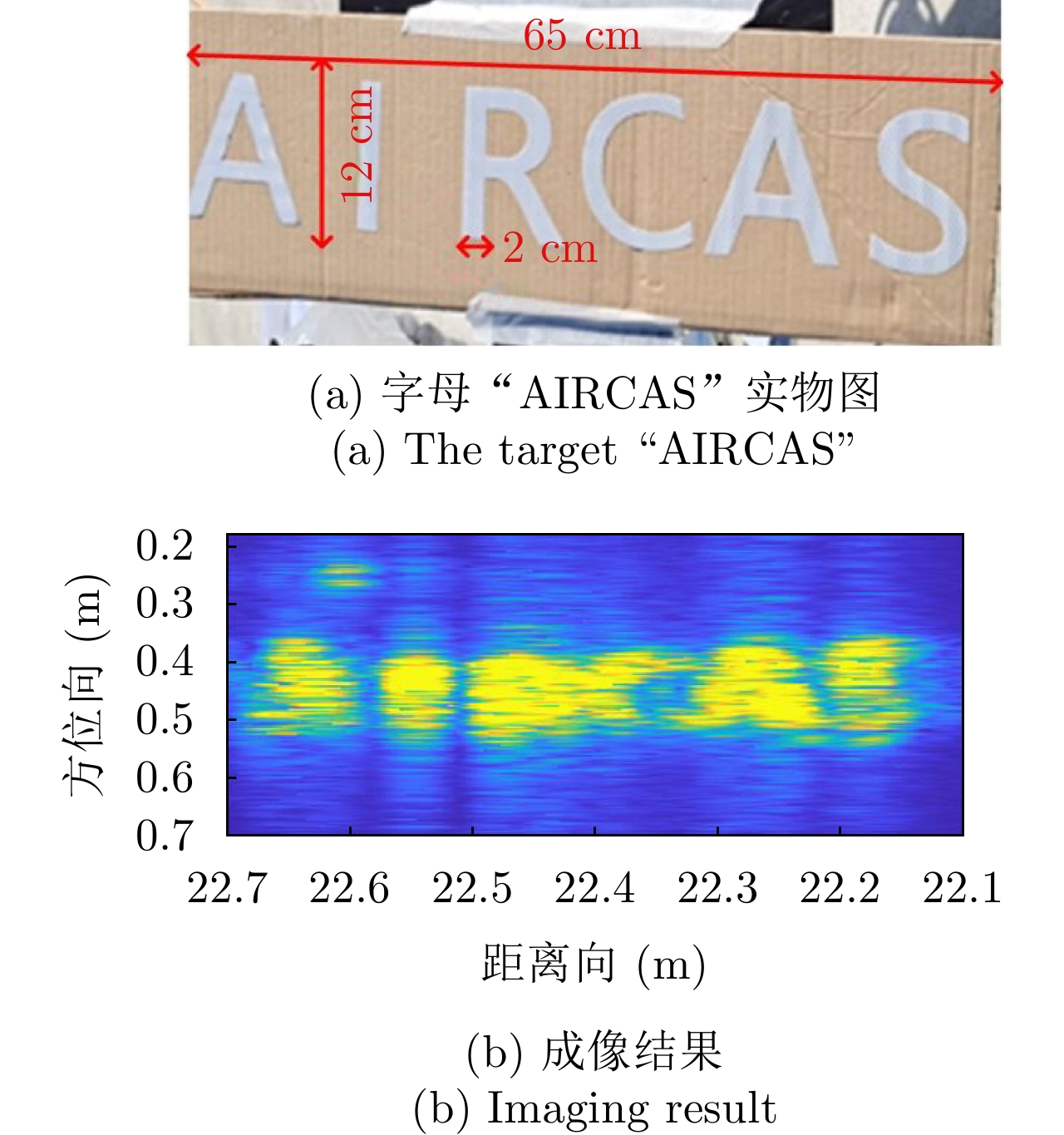
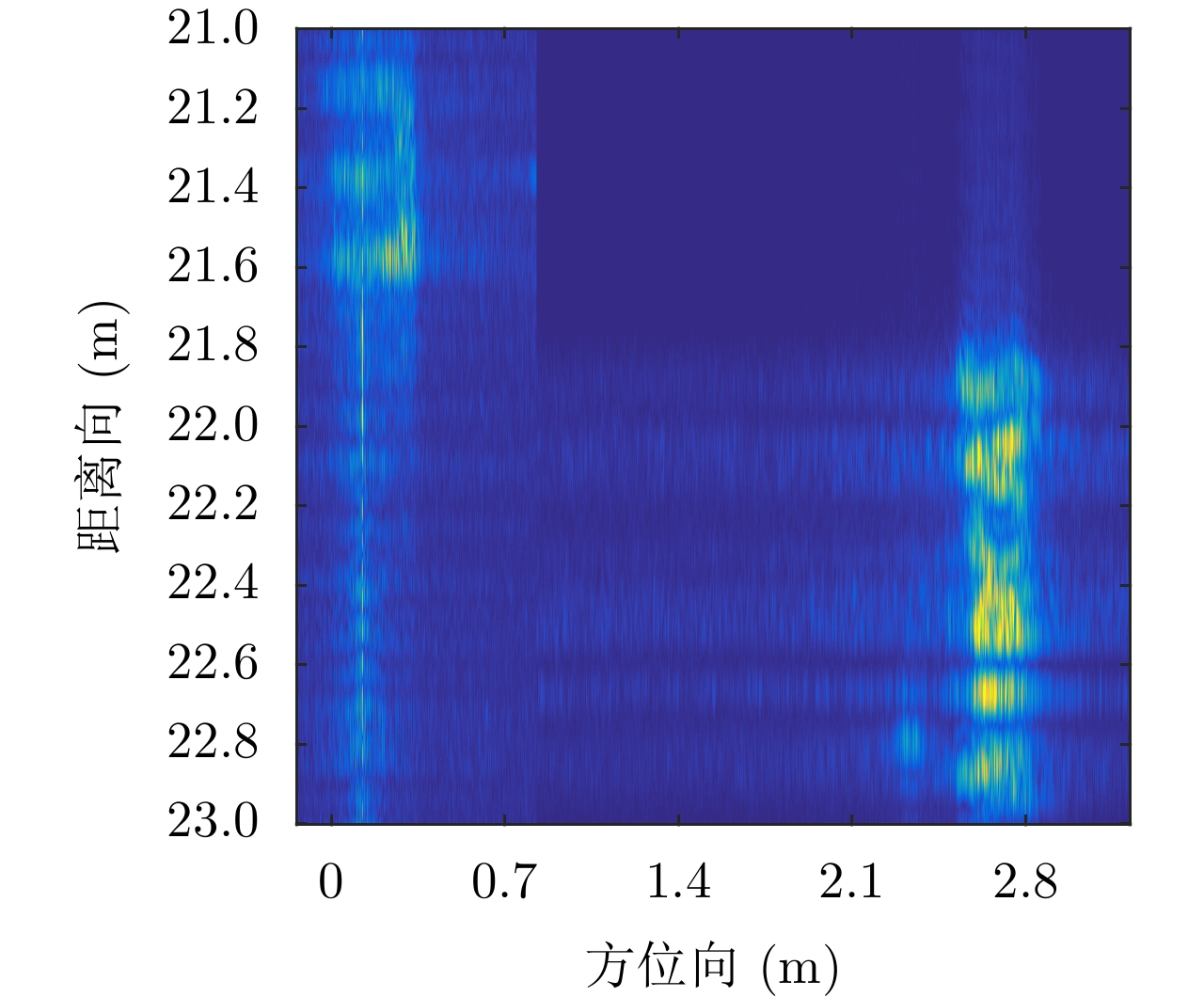
图 13 拼接得到的“E”和“AIRCAS”两个目标成像结果
Figure 13. The imaging result of target “E” and “AIRCAS”
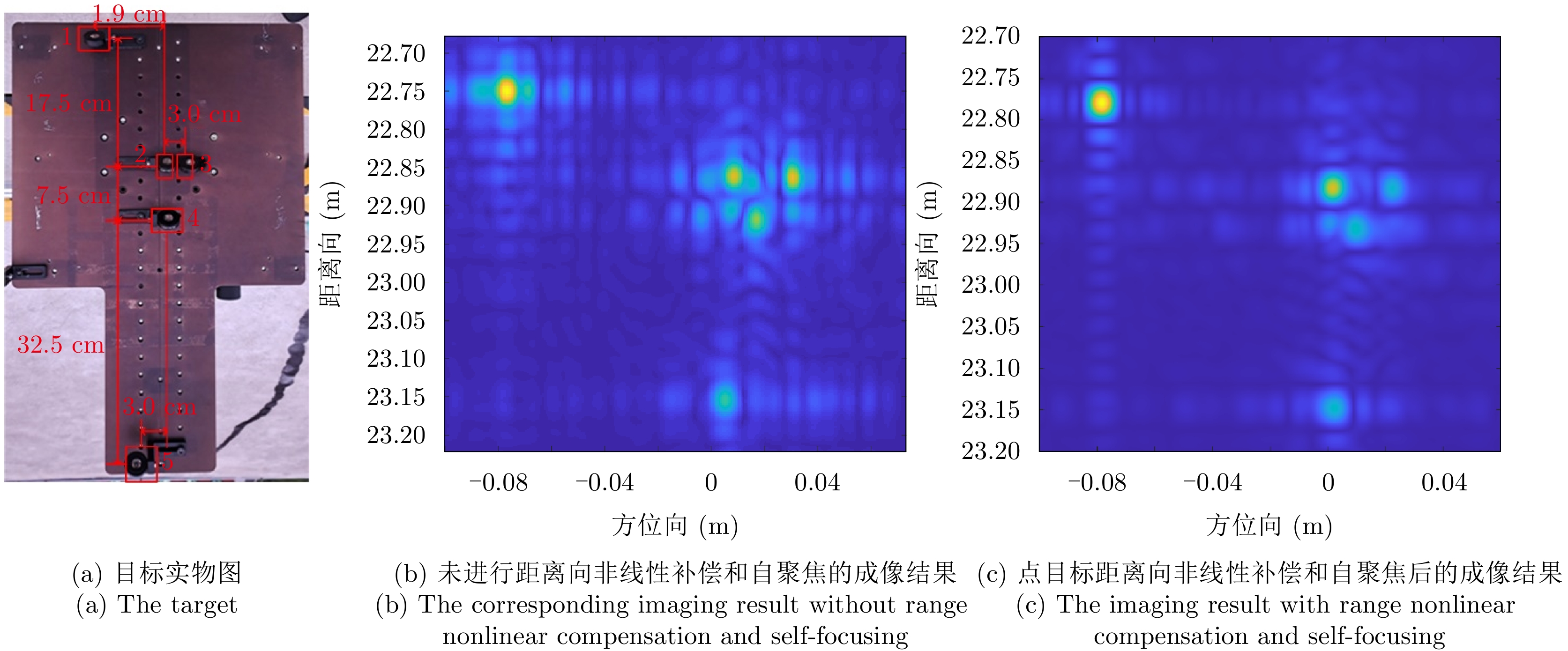
表 1 点目标切片分析
Table 1. Slice analysis of point target
序号 距离向分辨率(cm) 距离向PSLR 方位向分辨率(cm) 方位向PSLR 点目标1 2.79 –13.35 0.68 –18.96 点目标2 2.70 –13.97 0.65 –11.39 点目标3 2.79 –14.55 0.63 –9.47 点目标4 2.88 –14.39 0.69 –5.21 点目标5 2.79 –12.98 0.81 –12.75  下载: 导出CSV
下载: 导出CSV
-
[1] LEWIS T S and HUTCHINS H S. A synthetic aperture at optical frequencies[J]. Proceedings of the IEEE, 1970, 58(4): 587–588. doi: 10.1109/PROC.1970.7698 [2] MARCUS S, COLELLA B D, and GREEN T J. Solid-state laser synthetic aperture radar[J]. Applied Optics, 1994, 33(6): 960–964. doi: 10.1364/AO.33.000960 [3] GREEN T J, MARCUS S, and COLELLA B D. Synthetic-aperture-radar imaging with a solid-state laser[J]. Applied Optics, 1995, 34(30): 6941–6949. doi: 10.1364/AO.34.006941 [4] BASHKANSKY M, LUCKE R L, FUNK E, et al. Two-dimensional synthetic aperture imaging in the optical domain[J]. Optics Letters, 2002, 27(22): 1983–1985. doi: 10.1364/OL.27.001983 [5] BECK S M, BUCK J R, BUELL W F, et al. Synthetic-aperture imaging laser radar: Laboratory demonstration and signal processing[J]. Applied Optics, 2005, 44(35): 7621–7629. doi: 10.1364/AO.44.007621 [6] KRAUSE B W, BUCK J, RYAN C, et al. Synthetic aperture Ladar flight demonstration[C]. Laser Science to Photonic Applications, Baltimore, USA, 2011: 1–2. [7] 郭亮. 合成孔径成像激光雷达实验与算法研究[D]. [博士论文], 西安电子科技大学, 2009: 43–62.GUO Liang. Study on experiment and algorithm of synthetic aperture imaging Lidar[D]. [Ph. D. dissertation], Xidian University, 2009: 43–62. [8] 刘立人, 周煜, 职亚楠, 等. 大口径合成孔径激光成像雷达演示样机及其实验室验证[J]. 光学学报, 2011, 31(9): 0900112. doi: 10.3788/AOS201131.0900112LIU Liren, ZHOU Yu, ZHI Ya’nan, et al. A large-aperture synthetic aperture imaging Ladar demonstrator and its verification in laboratory space[J]. Acta Optica Sinica, 2011, 31(9): 0900112. doi: 10.3788/AOS201131.0900112 [9] 吴谨, 杨兆省, 赵志龙, 等. 单程远场衍射合成孔径激光雷达成像实验室演示[J]. 红外与毫米波学报, 2013, 32(6): 514–518. doi: 10.3724/SP.J.1010.2013.00514WU Jin, YANG Zhaosheng, ZHAO Zhilong, et al. Synthetic aperture Ladar imaging with one-way far-field diffraction[J]. Journal of Infrared and Millimeter Waves, 2013, 32(6): 514–518. doi: 10.3724/SP.J.1010.2013.00514 [10] LI Guangzuo, WANG Ning, WANG Ran, et al. Imaging method for airborne SAL data[J]. Electronics Letters, 2017, 53(5): 351–353. doi: 10.1049/el.2016.4205 [11] 张珂殊, 潘洁, 王然, 等. 大幅宽激光合成孔径雷达成像技术研究[J]. 雷达学报, 2017, 6(1): 1–10. doi: 10.12000/JR16152ZHANG Keshu, PAN Jie, WANG Ran, et al. Study of wide swath synthetic aperture Ladar imaging techology[J]. Journal of Radars, 2017, 6(1): 1–10. doi: 10.12000/JR16152 [12] 张波, 周煜, 孙建锋, 等. 多通道宽幅度合成孔径激光成像雷达收发装置优化研究[J]. 光学学报, 2018, 38(5): 0528002. doi: 10.3788/AOS201838.0528002ZHANG Bo, ZHOU Yu, SUN Jianfeng, et al. Optimization research on multi-channel wide-swath synthetic aperture imaging Ladar transceiver system[J]. Acta Optica Sinica, 2018, 38(5): 0528002. doi: 10.3788/AOS201838.0528002 [13] 李道京, 周凯, 崔岸婧, 等. 多通道逆合成孔径激光雷达成像探测技术和实验研究[J]. 激光与光电子学进展, 2021, 58(18): 1811017. doi: 10.3788/LOP202158.1811017LI Daojing, ZHOU Kai, CUI Anjing, et al. Multi-channel inverse synthetic aperture Ladar imaging detection technology and experimental research[J]. Laser &Optoelectronics Progress, 2021, 58(18): 1811017. doi: 10.3788/LOP202158.1811017 [14] META A, HOOGEBOOM P, and LIGTHART L. Range non-linearities correction in FMCW SAR[C]. 2006 IEEE International Symposium on Geoscience and Remote Sensing, Denver, USA, 2006: 403–406. -




计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

