
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
-
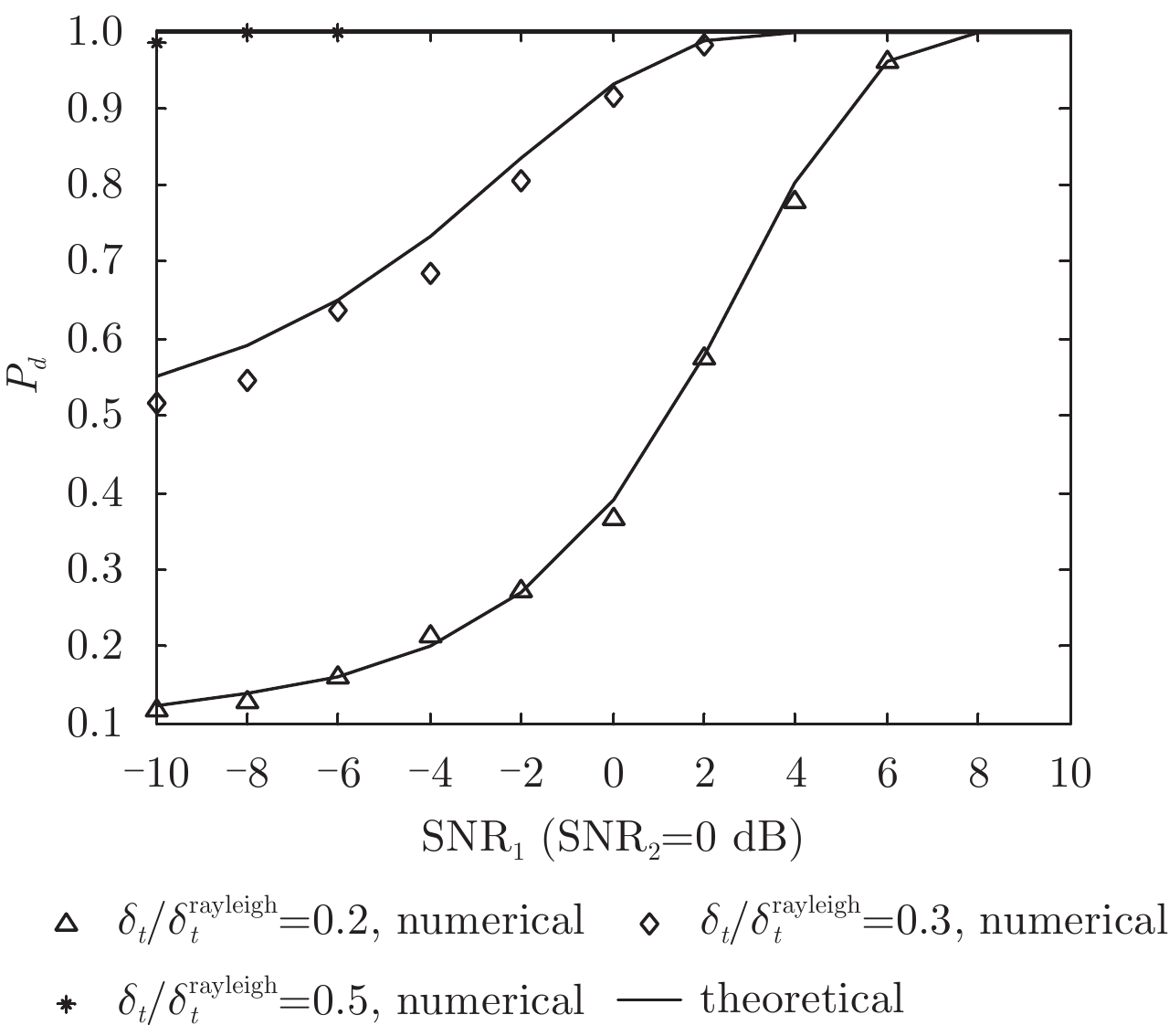
摘要: 分辨率是雷达系统的重要性能指标之一,传统采用模糊函数(AF)来分析波形的距离和多普勒分辨能力。该文提出以下观点:第一,传统的模糊函数分析方法的基本出发点是首先采用匹配滤波来处理回波信号,而从机理上来说,匹配滤波是在白噪声和点目标前提下使得输出信噪比(SNR)最大,对检测来说最优,但不适用于多个目标的分辨问题;第二,模糊函数分析方法并不能反映出噪声、目标起伏等随机因素,以及近距多目标波形相互干扰等因素的影响;第三,模糊函数只适用于两相同信噪比目标分辨,不适用于实际中经常存在的不同信噪比的多个目标的分辨。该文基于原始回波数据,采用统计学中的假设检验理论来研究雷达近邻目标距离分辨的问题,在给出统计意义上的正确分辨概率和虚判概率定义基础上,推导近邻目标距离统计分辨限(SRL)的表达式。仿真表明,统计分辨限可以突破瑞利限。当设定虚判概率和分辨概率分别为0.001和0.5时,对两幅度相位差为90度的0 dB的线性调频信号,距离统计分辨下限可达0.3倍瑞利限。Abstract: Resolution performance is an important performance criteria of the radar systems. Typically, the Ambiguity Function (AF) of signals is used to define the range and Doppler limits. In this study Some new opinions are proposed—First, the AF is based on the signals processed with matched filter, which can guarantee the maximization of the output of the Signal-to-Noise Ratio (SNR). Thus, the AF is optimal for target detection. However, the AF is unsuitable for the resolution of multiple targets. Second, the AF cannot reflect the effect of random factors, such as noise, target fluctuation, and mutual interference of close targets. Third, the AF can only handle two equal-powered targets and provide the conclusion of the limits. However, the AF fails to distinguish multiple unequal-powered targets, which is often the case in reality. Therefore, the hypothesis testing theory is applied to resolve the range resolution of two closely spaced targets for radars, and our study is based on the original echoes of the signals. With the definition of the correct resolution and false alarm rates in the statistical standpoint, we derive the expression of the range Statistical Resolution Limit (SRL). The simulation results indicate that the SRL can exceed the Rayleigh limit. With the false alarm and correct resolution rates being 0.001 and 0.5, respectively, for the two phase-orthogonal linear-frequency-modulated signals, the range SRL can be as low as 0.3 times of the Rayleigh limit.
-

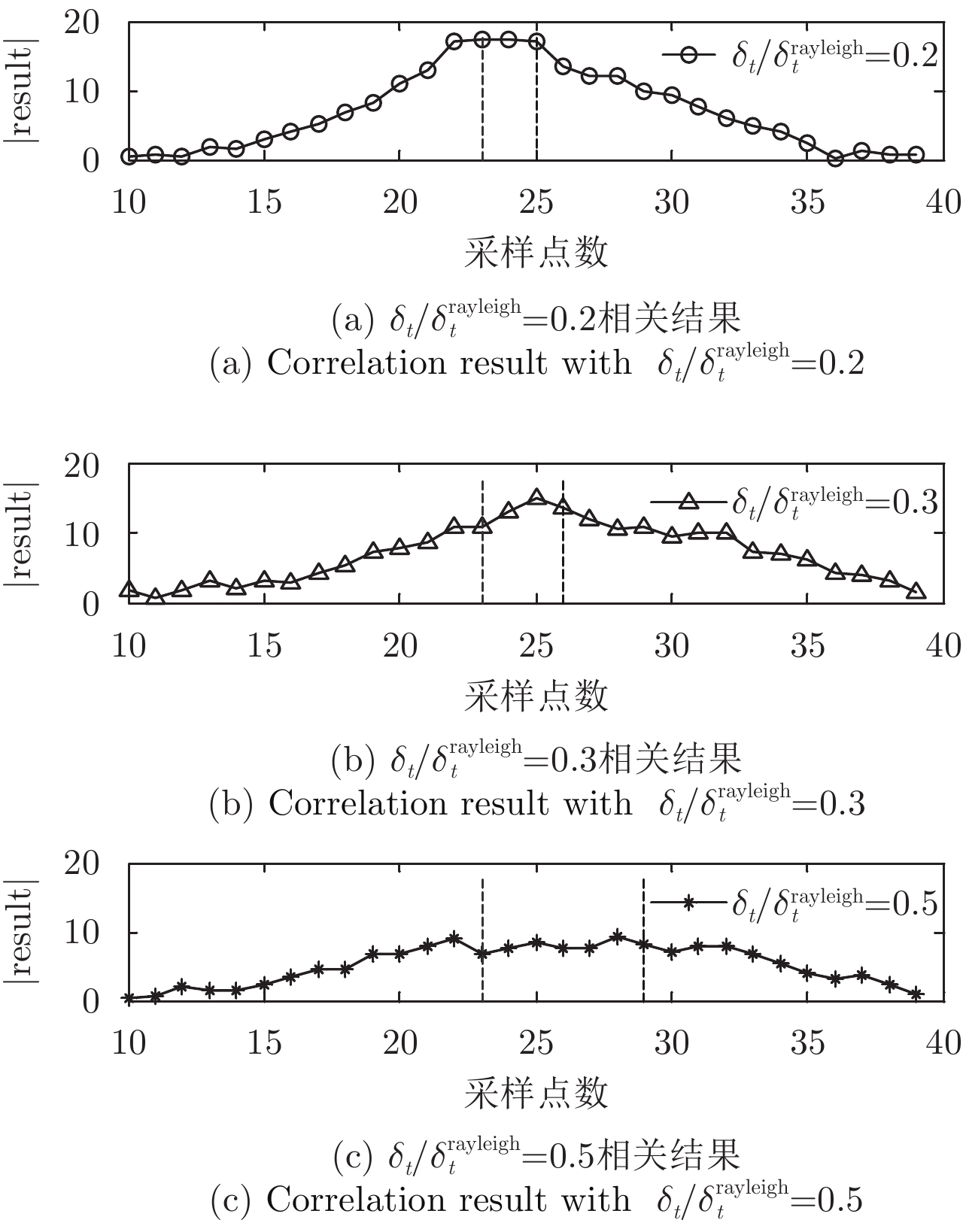
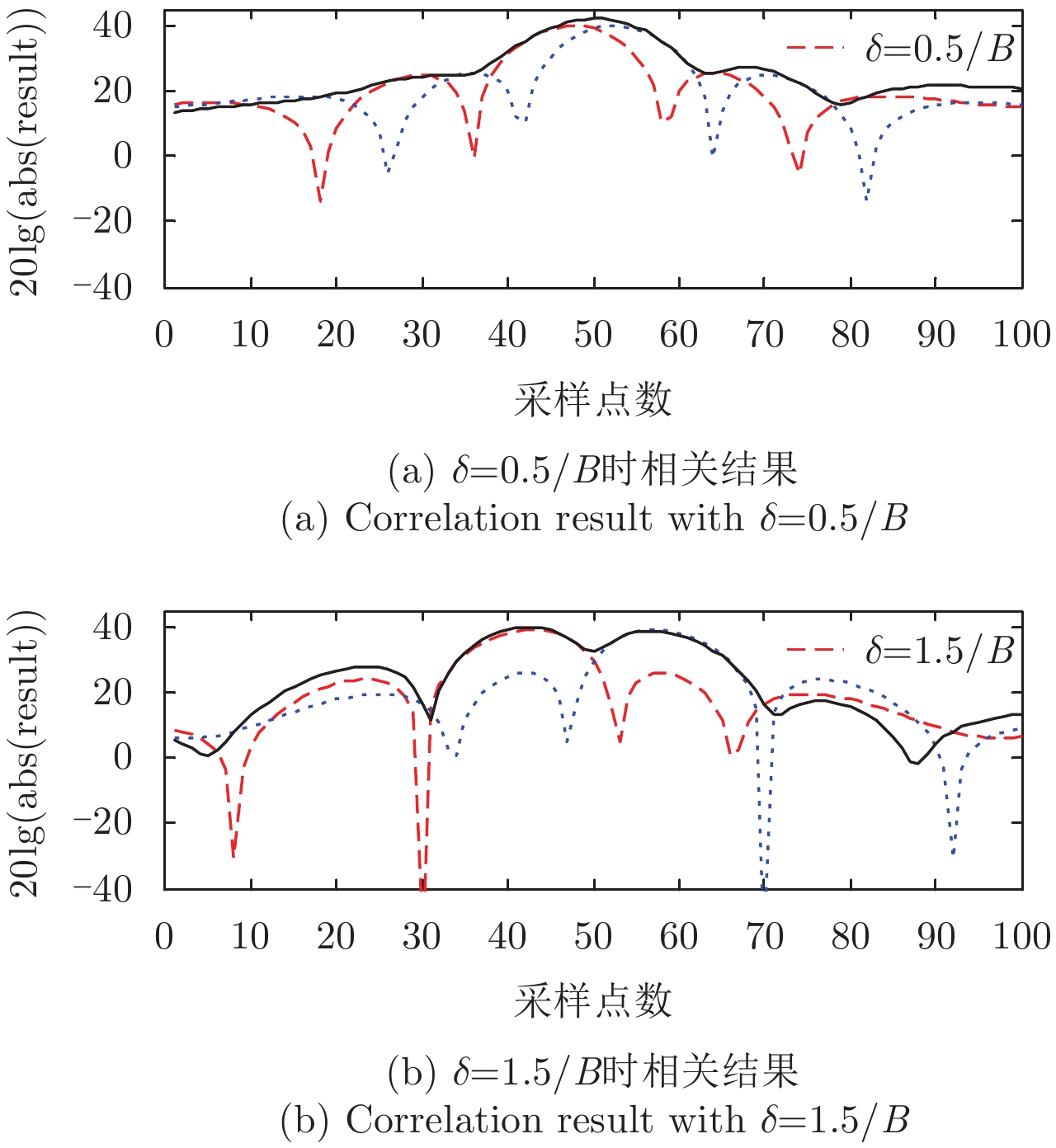
图 1 两线性调频信号相关的单次蒙特卡洛仿真
Figure 1. Monte Carlo simulation of the correlation result of two LFM signals
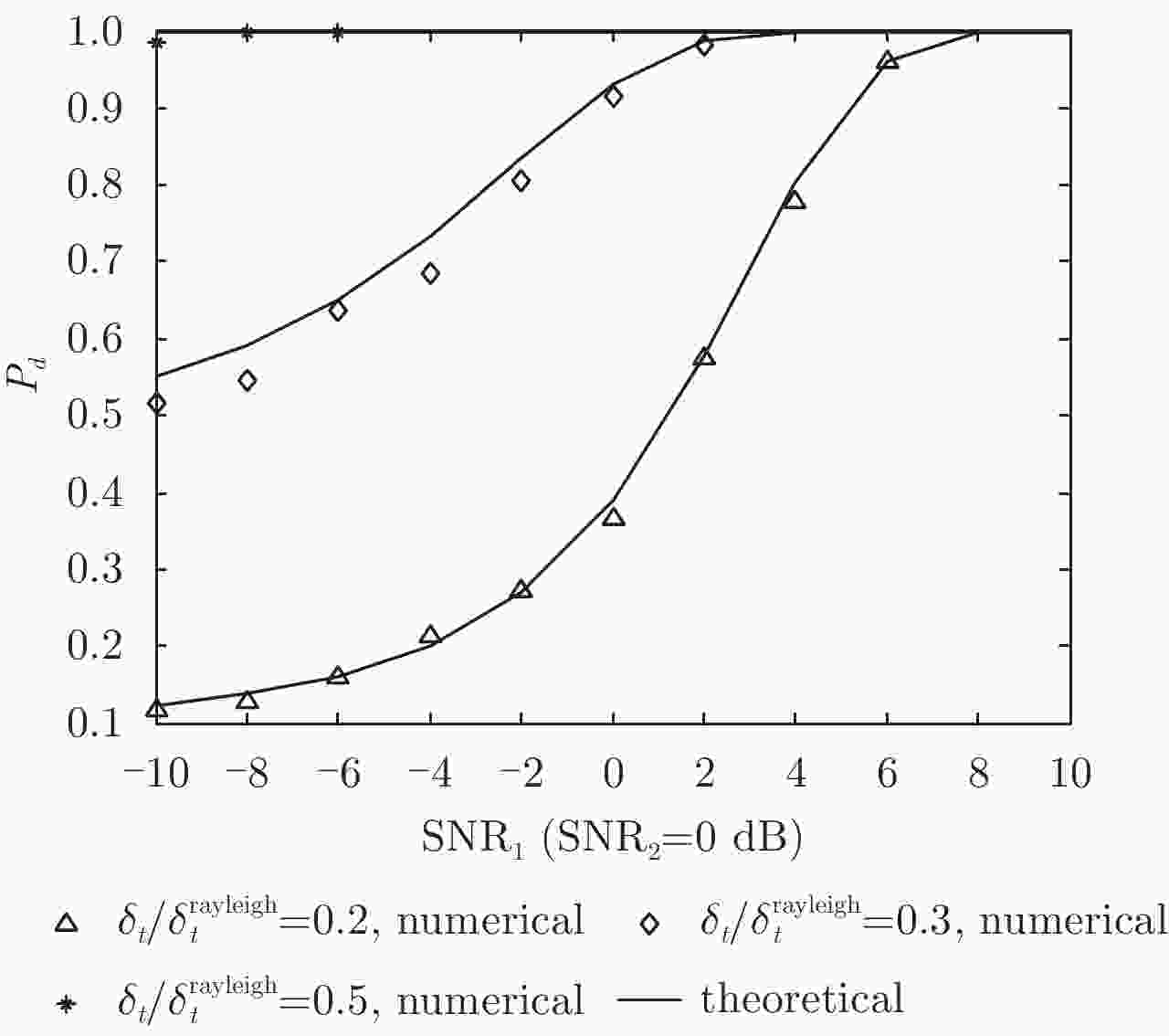
图 2 假设检验和匹配滤波方法的分辨性能对比
Figure 2. Comparisons of the hypothesis test and matched filter
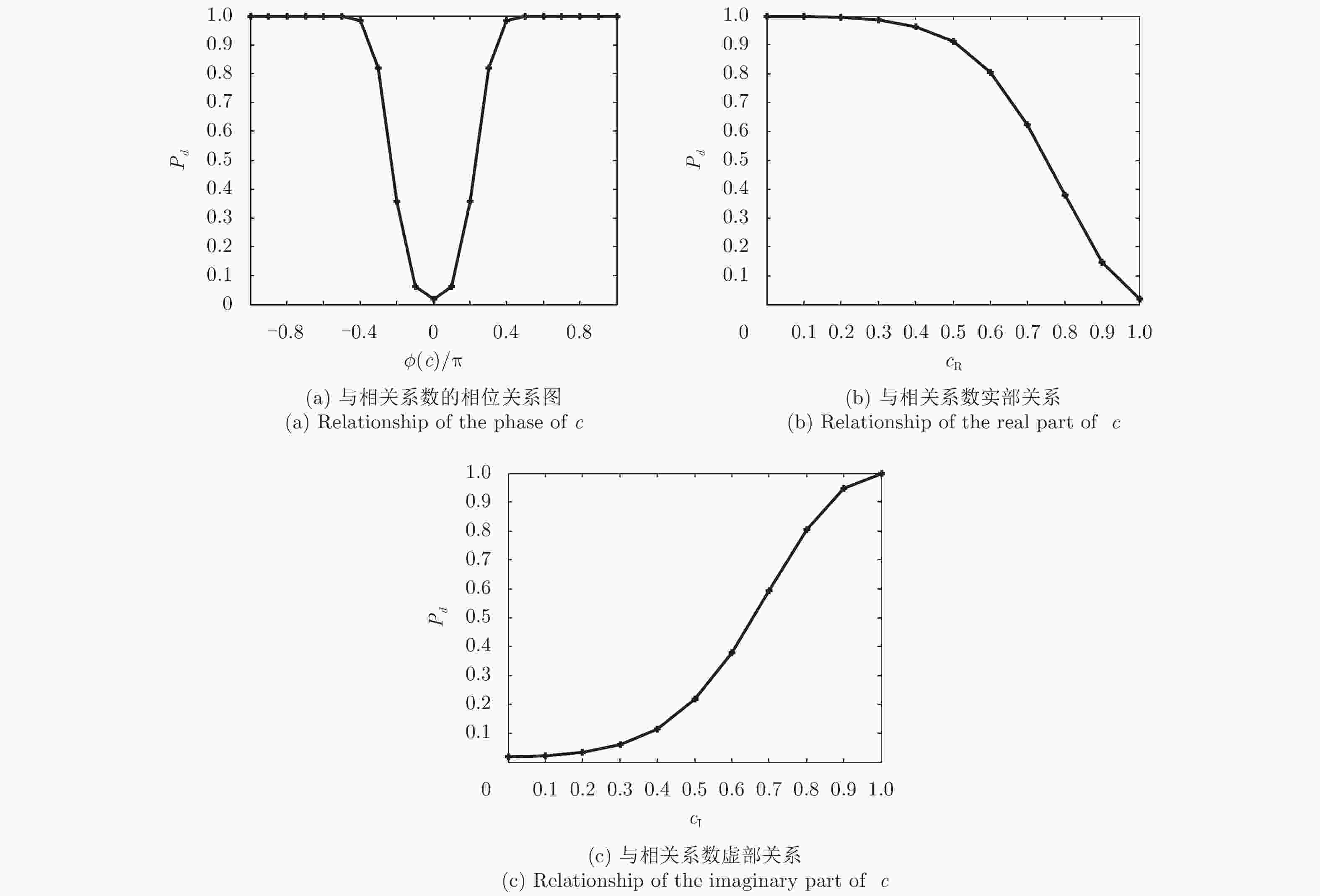
图 4 分辨概率与相关系数的关系
Figure 4. Relationship of the resolution rate and the correlation coefficient
-
[1] LEVANON N. Radar Principles[M]. New York: Wiley, 1998: 129–143. [2] WU X H, ZHU W P, and YAN J. A high-resolution DOA estimation method with a family of nonconvex penalties[J]. IEEE Transactions on Vehicular Technology, 2018, 67(6): 4925–4938. doi: 10.1109/TVT.2018.2817638 [3] SHEN F F, LIU Y M, LI X P, et al.. High resolution DOA estimation based on Bayesian compressive sensing[C]. Proceedings of the 2017 2nd International Conference on Frontiers of Sensors Technologies, Shenzhen, China, 2017: 274–278. doi: 10.1109/ICFST.2017.8210518. [4] LI X Y, GUO S X, JIN L, et al. High-resolution DOA estimation for cooperation networks using space-time hopping[J]. Electronics Letters, 2016, 52(11): 978–980. doi: 10.1049/el.2015.4194 [5] LEE H B. The Cramer-rao bound on frequency estimates of signals closely spaced in frequency[J]. IEEE Transactions on Signal Processing, 1994, 42(6): 1569–1572. doi: 10.1109/78.286979 [6] SMITH S T. Statistical resolution limits and the complexified Cramér-rao bound[J]. IEEE Transactions on Signal Processing, 2005, 53(5): 1597–1609. doi: 10.1109/TSP.2005.845426 [7] EL KORSO M N, BOYER R, RENAUX A, et al. Statistical resolution limit for multiple parameters of interest and for multiple signals[C]. Proceedings of 2010 IEEE International Conference on Acoustics, Speech and Signal Processing, Dallas, USA, 2010: 3602–3605. doi: 10.1109/ICASSP.2010.5495922. [8] BAO T, EL KORSO M N, and OUSLIMANI H H. Cramér-rao bound and statistical resolution limit investigation for near-field source localization[J]. Digital Signal Processing, 2016, 48: 137–147. doi: 10.1016/j.dsp.2015.09.019 [9] SHAHRAM M and MILANFAR P. On the resolvability of sinusoids with nearby frequencies in the presence of noise[J]. IEEE Transactions on Signal Processing, 2005, 53(7): 2579–2588. doi: 10.1109/TSP.2005.845492 [10] LIU Z and NEHORAI A. Statistical angular resolution limit for point sources[J]. IEEE Transactions on Signal Processing, 2007, 55(11): 5521–5527. doi: 10.1109/TSP.2007.898789 [11] EL KORSO M N, BOYER R, RENAUX A, et al. On the asymptotic resolvability of two point sources in known subspace interference using a GLRT-based framework[J]. Signal Processing, 2012, 92(10): 2471–2483. doi: 10.1016/j.sigpro.2012.03.011 [12] ZHU W, TANG J, and WAN S. Angular resolution limit of two closely-spaced point sources based on information theoretic criteria[C]. Proceedings of 2014 IEEE International Conference on Acoustics, Speech and Signal Processing, Florence, Italy, 2014: 86–90. doi: 10.1109/ICASSP.2014.6853563. [13] SUN M H, JIANG D D, SONG H B, et al. Statistical resolution limit analysis of two closely spaced signal sources using Rao test[J]. IEEE Access, 2017, 5: 22013–22022. doi: 10.1109/ACCESS.2017.2760885 [14] THAMERI M, ABED-MERAIM K, FOROOZAN F, et al. On the Statistical Resolution Limit (SRL) for time-reversal based MIMO radar[J]. Signal Processing, 2018, 144: 373–383. doi: 10.1016/j.sigpro.2017.10.029 [15] SHAHRAM M and MILANFAR P. Imaging below the diffraction limit: A statistical analysis[J]. IEEE Transactions on Image Processing, 2004, 13(5): 677–689. doi: 10.1109/TIP.2004.826096 [16] SHAHRAM M and MILANFAR P. Statistical and information-theoretic analysis of resolution in imaging[J]. IEEE Transactions on Information Theory, 2006, 52(8): 3411–3437. doi: 10.1109/TIT.2006.878180 [17] KAY S M. Fundamentals of Statistical Signal Processing: Detection Theory[M]. Upper Saddle River, NJ: Prentice-Hall, 1998. [18] KAY S M. Fundamentals of Statistical Signal Processing: Estimation Theory[M]. Upper Saddle River, NJ: Prentice-Hall, 1993. [19] CARDANO G. Ars Magna or the Rules of Algebra[M]. Mineola: Dover, 1993. -

 下载:
下载:



图(6)
计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

