
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
Space-borne SAR Three-dimensional Imaging by Joint Multiple Azimuth Angle Doppler Frequency Rate Estimation
-
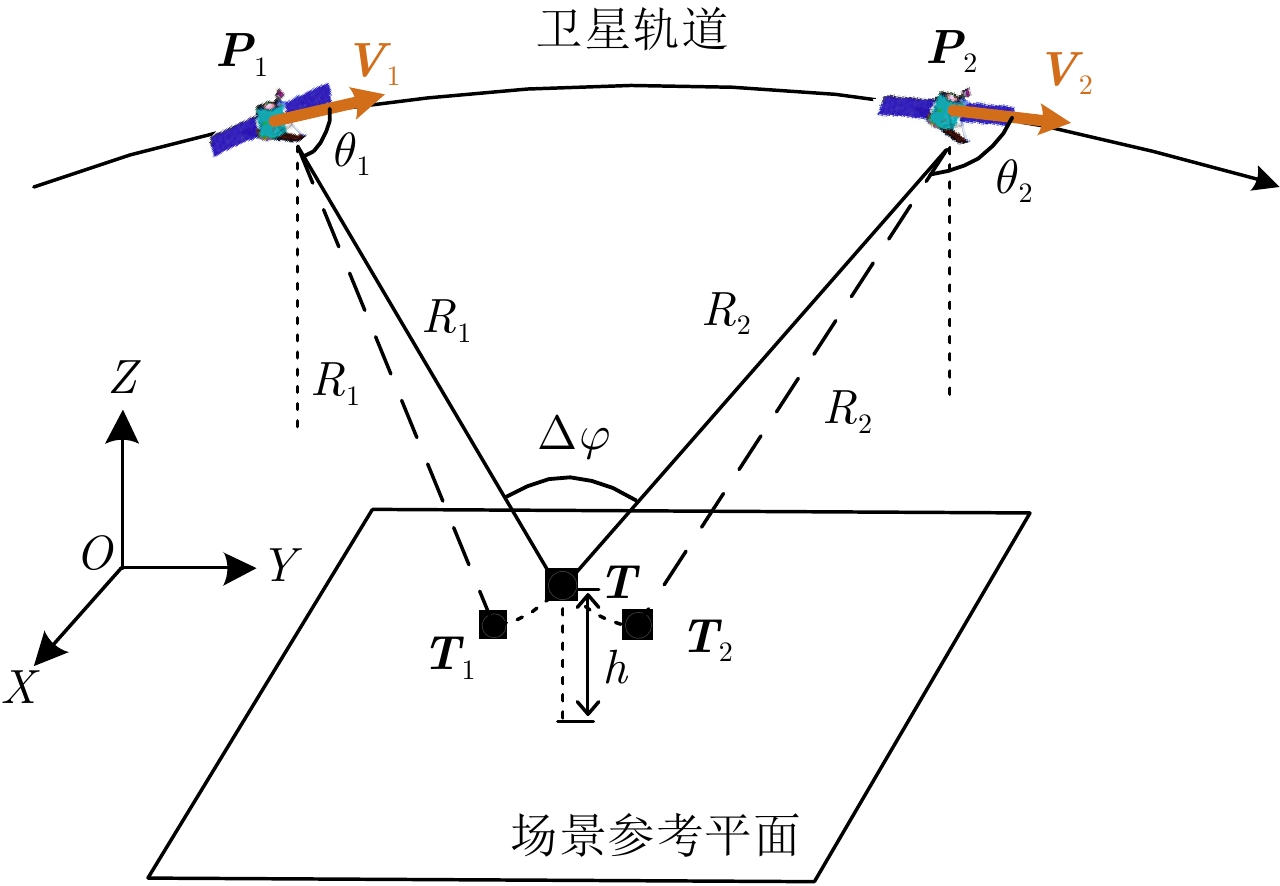
摘要: 星载合成孔径雷达(Synthetic Aperture Radar, SAR)通过波束的方位向扫描可以实现单次航过的多方位观测。在多方位角观测过程中,卫星弯曲轨道可等效为长3维曲线阵列,从而具备了3维成像能力。由于多方位角观测在高度维采样的稀疏性,无法直接通过3维FFT实现无模糊成像,且目标在不同方位角SAR图像的投影与高程间的传递相对复杂。针对该问题,该文提出了联合多方位角调频率估计的星载SAR3维成像方法。该方法首先给出了不同观测方位角下多普勒调频率误差与目标高程误差间的关系,利用视错位法(Map Drift, MD)估计多普勒调频率误差。然后,联合多方位角高程估计结果提升高程估计精度。最后,利用高程估计结果恢复目标3维几何信息,从而实现3维成像。仿真实验验证了该方法的高程估计精度可达米级。
-
关键词:
- 合成孔径雷达(SAR) /
- 多方位角观测 /
- 3维成像 /
- 调频率估计
Abstract: Using azimuth beam steering, space-borne Synthetic Aperture Radar (SAR) can observe from multiple azimuth angle in single pass. During multiple azimuth angle observation, the satellite orbit is equivalent to long three-dimensional (3-D) curvilinear array, which has the potential for 3-D imaging. Sampling by space-borne multiple azimuth angle SAR is sparse in height dimension, which makes unambiguous 3-D imaging by 3-D fast Fourier transform infeasible. Besides, the complex relationship between the targets’ projection in multi-angle SAR images and the height error is difficult to determine. To overcome this limitation, in this paper, we present a 3-D imaging method based on joint multiple azimuth angle Doppler frequency rate estimation. First, a relationship is proposed between the height error and Doppler frequency rate at different azimuth angle. Then, the Doppler frequency modulation rate error is estimated by Map Drift (MD) technique. Next, the height estimation results of different azimuth angle are combined to improve the estimation accuracy. From the estimated height and the target location in the SAR images, 3-D geometric information is retrieved and 3-D imaging is achieved. Our simulation experiments validate that the height estimation can achieve an accuracy of few meters with the proposed method. -
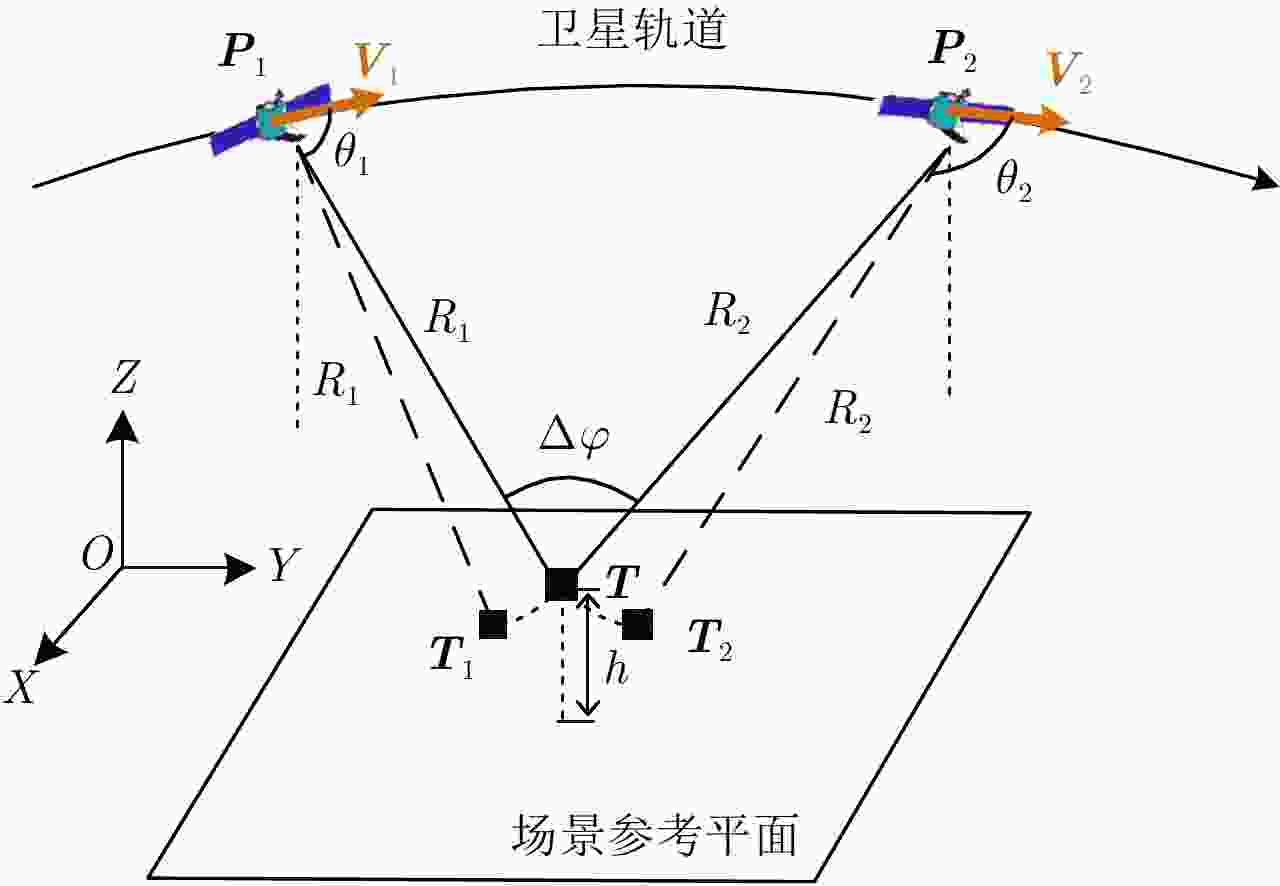
图 1 星载SAR多方位角观测几何示意图
Figure 1. Space-borne SAR multiple azimuth angle observation geometry

图 4 多方位角观测星载SAR的3维成像方法流程图
Figure 4. The schematic diagram of space-borne SAR 3-D imaging method by multiple azimuth angle observation
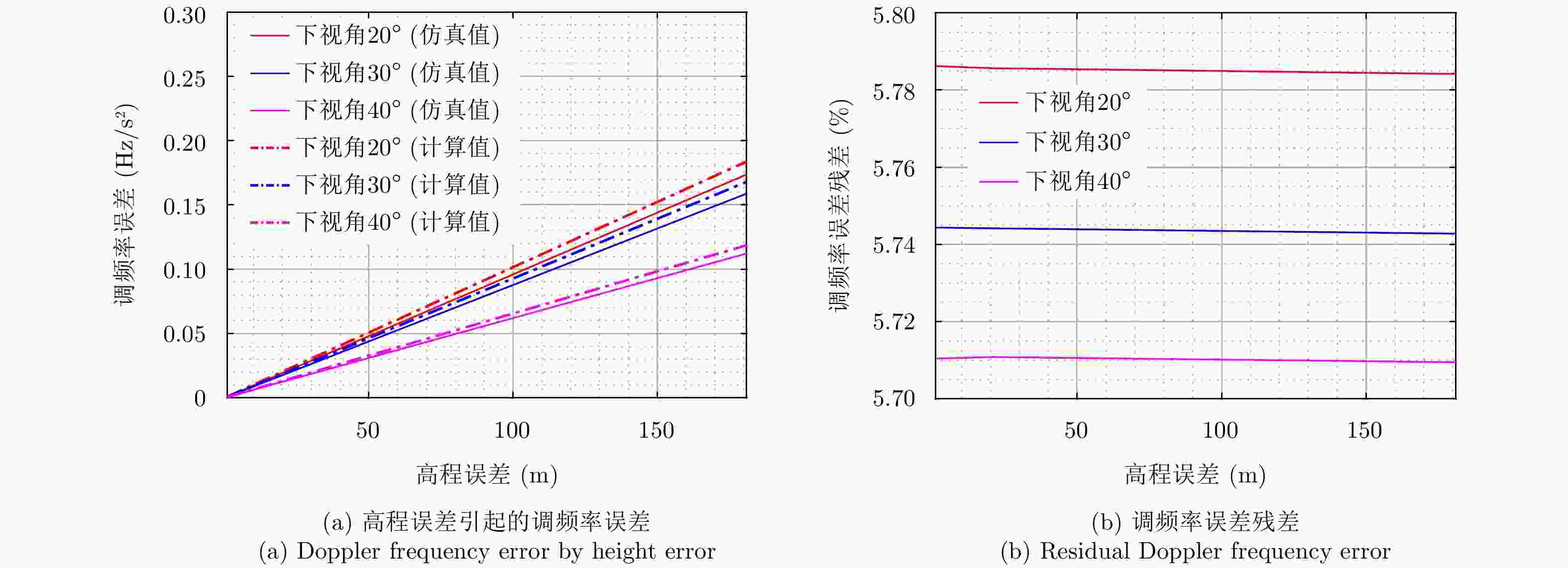
图 3 不同下视角对应的多普勒调频率误差与高程误差
Figure 3. The relationship between Doppler frequency error and height in different nadir angles
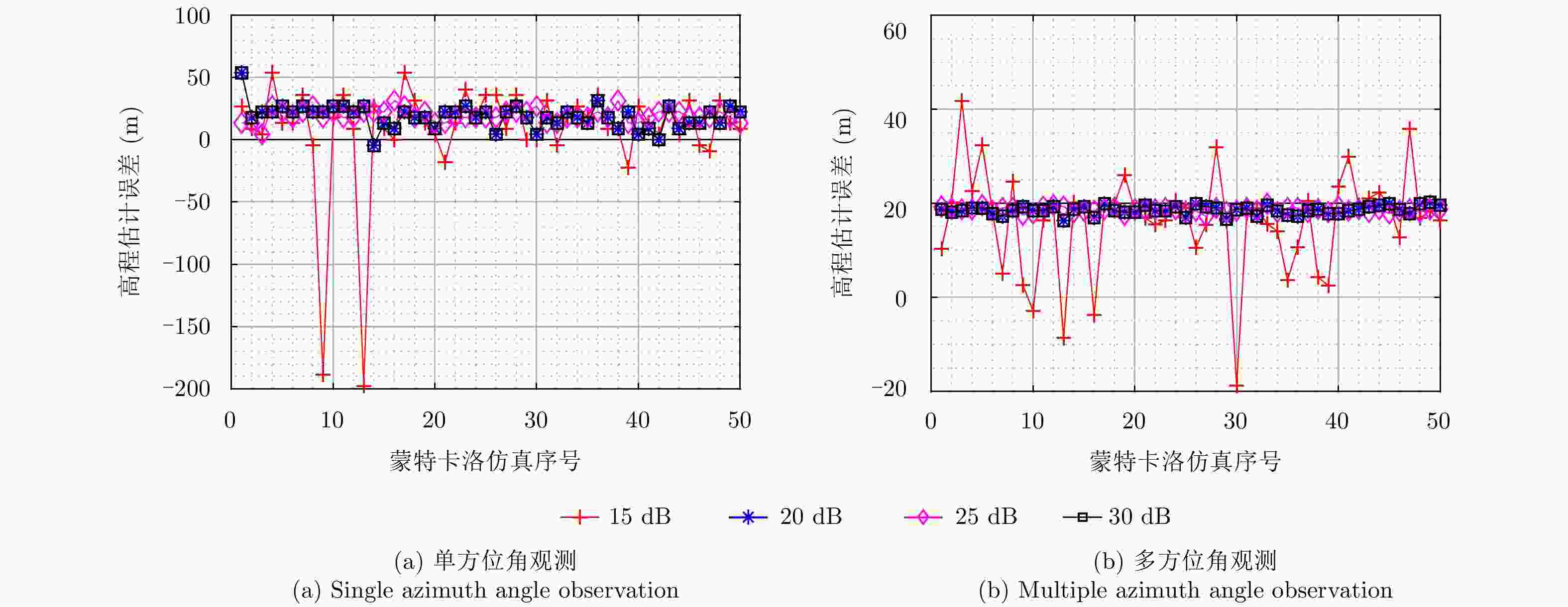
图 7 不同信杂比下的蒙特卡洛高程估计结果记录
Figure 7. Monte Carlo height estimation record in various signal clutter ratio
表 1 仿真参数
Table 1. Simulation parameters
参数 数值 轨道高度(km) 514 轨道倾角(°) 97.4 雷达载频(GHz) 9.70 雷达带宽(MHz) 600 雷达波束中心下视角(°) 35 数据方位角跨度(°) [–16, +16] 观测场景纬度(°N) 0  下载: 导出CSV
下载: 导出CSV
-
[1] 杨汝良, 李海英, 李世强, 等. 高分辨率微波成像[M]. 北京: 国防工业出版社, 2013: VII–IX.Yang Ru-liang, Li Hai-ying, Li Shi-qiang, et al.. High Resolution Microwave Imaging[M]. Beijing: National Defense Industry Press, 2013: VII–IX. [2] 侯建国, 张勤, 杨成生. InSAR技术及其在地质灾害中的应用[J]. 测绘与空间地理信息, 2007, 30(6): 28–30, 35. DOI: 10.3969/j.issn.1672-5867.2007.06.008Hou Jian-guo, Zhang Qin, and Yang Cheng-sheng. Introduction to InSAR and its applications in geohazards[J]. Geomatics&Spatial Information Technology, 2007, 30(6): 28–30, 35. DOI: 10.3969/j.issn.1672-5867.2007.06.008 [3] Krieger G, Hajnsek I, Younis M, et al. Interferometric synthetic aperture radar (SAR) missions employing formation flying[J]. Proceedings of the IEEE, 2010, 98(5): 816–843. DOI: 10.1109/JPROC.2009.2038948 [4] Reigber A and Moreira A. First demonstration of airborne SAR tomography using multibaseline L-band data[J]. IEEE Transactions on Geoscience and Remote Sensing, 2000, 38(5): 2142–2152. DOI: 10.1109/36.868873 [5] Poncos V. On the use of TerraSAR-X and Radarsat-2 spotlight data for persistent scatterers and tomographic analysis[C]. Proceedings of IEEE International Geoscience and Remote Sensing Symposium, Munich, Germany, 2012. [6] 周汉飞, 李禹, 粟毅. 利用多角度SAR数据实现三维成像[J]. 电子与信息学报, 2013, 35(10): 2467–2474. DOI: 10.3724/SP.J.1146.2012.01534Zhou Han-fei, Li Yu, and Su Yi. Three-dimensional imaging with multi-aspect SAR data[J]. Journal of Electronics&Information Technology, 2013, 35(10): 2467–2474. DOI: 10.3724/SP.J.1146.2012.01534 [7] 周汉飞, 李禹, 粟毅. 基于压缩感知的多角度SAR特征提取[J]. 电子学报, 2013, 41(3): 543–548. DOI: 10.3969/j.issn.0372-2112.2013.03.021Zhou Han-fei, Li Yu, and Su Yi. Multi-aspect SAR feature extraction based on compressive sensing[J]. Acta Electronica Sinica, 2013, 41(3): 543–548. DOI: 10.3969/j.issn.0372-2112.2013.03.021 [8] 洪文. 圆迹SAR成像技术研究进展[J]. 雷达学报, 2012, 1(2): 124–135. DOI: 10.3724/SP.J.1300.2012.20046Hong Wen. Progress in circular SAR imaging technique[J]. Journal of Radars, 2012, 1(2): 124–135. DOI: 10.3724/SP.J.1300.2012.20046 [9] Ertin E, Austin C D, Sharma S, et al.. GOTCHA experience report: Three-dimensional SAR imaging with complete circular apertures[C]. Proceedings of SPIE 6568, Algorithms for Synthetic Aperture Radar Imagery XIV, Orlando, United States, 2007: 656802. DOI: 10.1117/12.723245. [10] Knaell K. Three-dimensional SAR from curvilinear apertures[C]. Proceedings of the 1996 IEEE National Radar Conference, Ann Arbor, USA, 1996: 220–225. DOI: 10.1109/NRC.1996.510684. [11] 何峰, 杨阳, 董臻, 等. 曲线合成孔径雷达三维成像研究进展与展望[J]. 雷达学报, 2015, 4(2): 130–135. DOI: 10.12000/JR14119He Feng, Yang Yang, Dong Zhen, et al. Progress and prospects of curvilinear SAR 3-D imaging[J]. Journal of Radars, 2015, 4(2): 130–135. DOI: 10.12000/JR14119 [12] Ferrara M, Jackson J A, and Austin C. Enhancement of multi-pass 3D circular SAR images using sparse reconstruction techniques[C]. Proceedings of SPIE 7337, Algorithms for Synthetic Aperture Radar Imagery XVI, Orlando, Florida, United States, 2009: 733702. DOI: 10.1117/12.820256. [13] Zhang J Q, Suo Z Y, Li Z F, et al. DEM Generation using circular SAR data based on low-rank and sparse matrix decomposition[J]. IEEE Geoscience and Remote Sensing Letters, 2018, 15(5): 724–728. DOI: 10.1109/LGRS.2018.2809905 [14] Chen L P, An D X, Huang X T, et al. A 3D reconstruction strategy of vehicle outline based on single-pass single-polarization CSAR data[J]. IEEE Transactions on Image Processing, 2017, 26(11): 5545–5554. DOI: 10.1109/TIP.2017.2738566 [15] Dungan K E and Potter L C. 3-D imaging of vehicles using wide aperture radar[J]. IEEE Transactions on Aerospace and Electronic Systems, 2011, 47(1): 187–200. DOI: 10.1109/TAES.2011.5705669 [16] Duque S, Breit H, Balss U, et al. Absolute height estimation using a single TerraSAR-X staring spotlight acquisition[J]. IEEE Geoscience and Remote Sensing Letters, 2015, 12(8): 1735–1739. DOI: 10.1109/LGRS.2015.2422893 [17] Curlander J C. Location of spaceborne SAR imagery[J]. IEEE Transactions on Geoscience and Remote Sensing, 1982, GE-20(3): 359–364. DOI: 10.1109/TGRS.1982.350455 [18] Ferretti A, Monti-Guarnieri A, Prati C, et al.. InSAR Principles - Guidelines for SAR Interferometry Processing and Interpretation[M]. The Netherlands: ESA Publications, 2007. [19] Cumming I G, Wong F H, 洪文, 胡东辉. 合成孔径雷达成像: 算法与实现[M]. 北京: 电子工业出版社, 2012: 385–389.Cumming I G, Wong F H, Hong Wen, Hu Dong-hui. Digital Processing of Synthetic Aperture Radar Data: Algorithms and Implementation[M]. Beijing: Publishing House of Electronics Industry, 2012: 385–389. [20] Menon K R, Balakrishnan N, Janakiraman M, et al. Characterization of fluctuation statistics of radar clutter for Indian terrain[J]. IEEE Transactions on Geoscience and Remote Sensing, 1995, 33(2): 317–324. DOI: 10.1109/36.377931 -





计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

