
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
A New Approach to Range Cell Migration Correction for Ground Moving Targets in High-resolution SAR System Based on Parameter Estimation
-
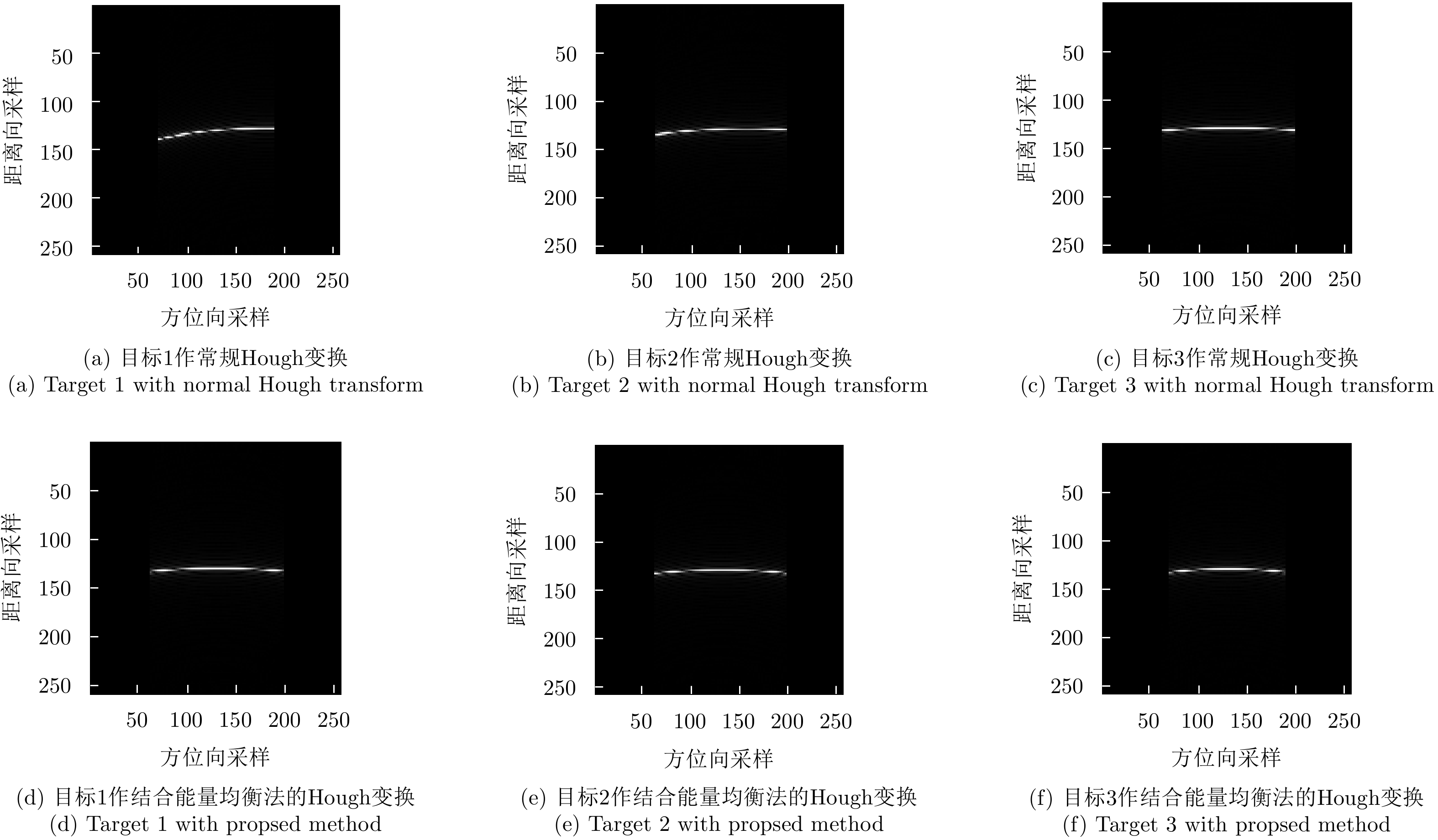
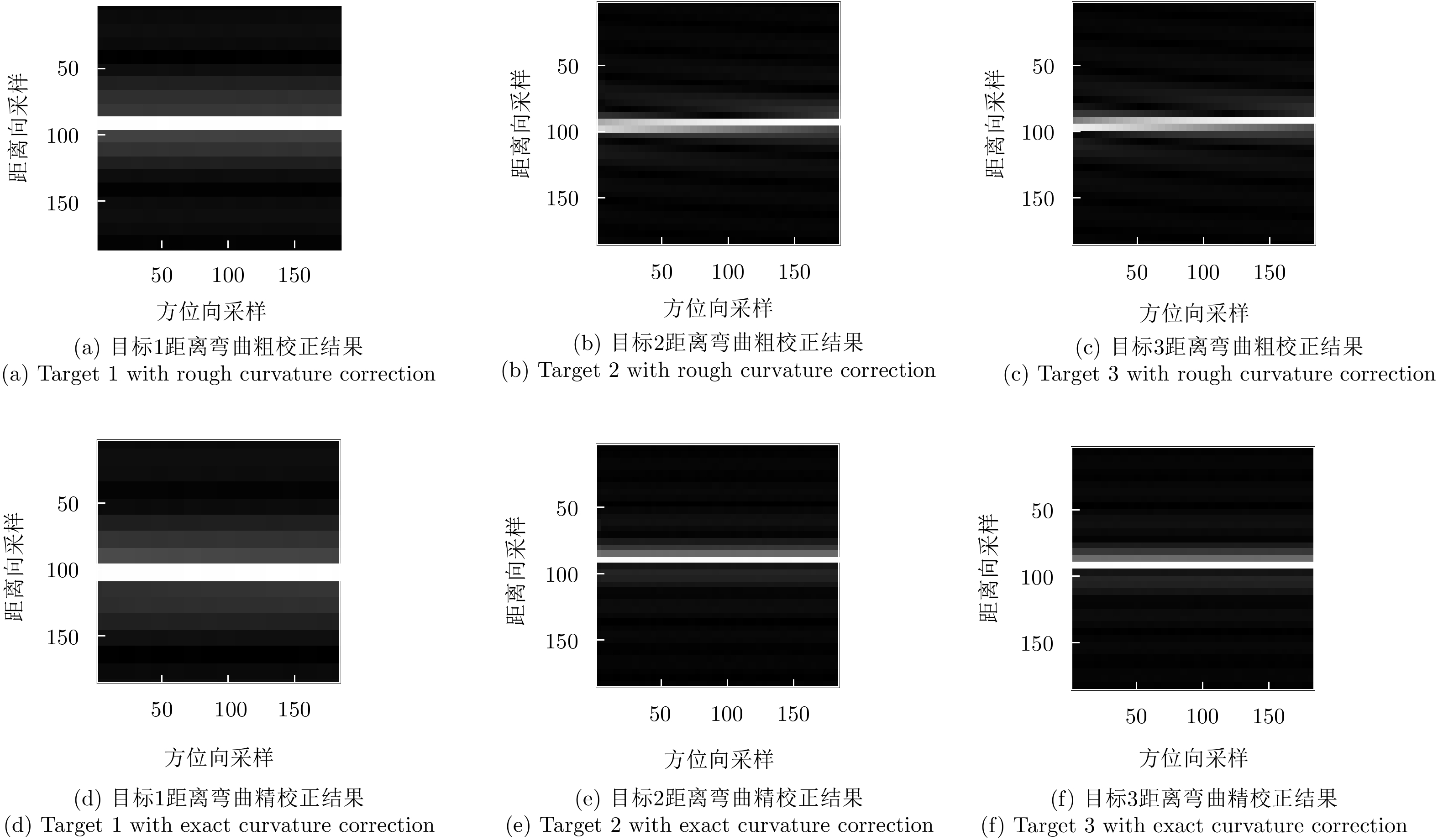
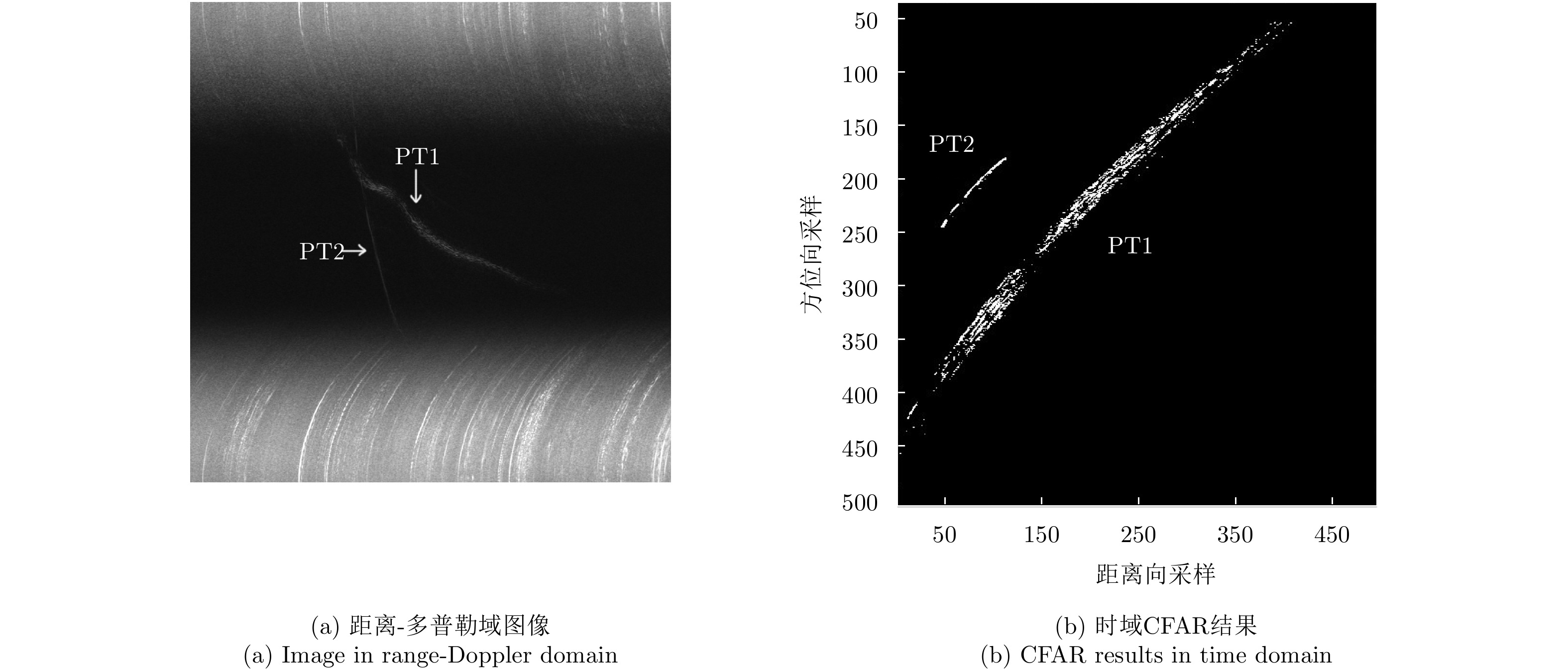
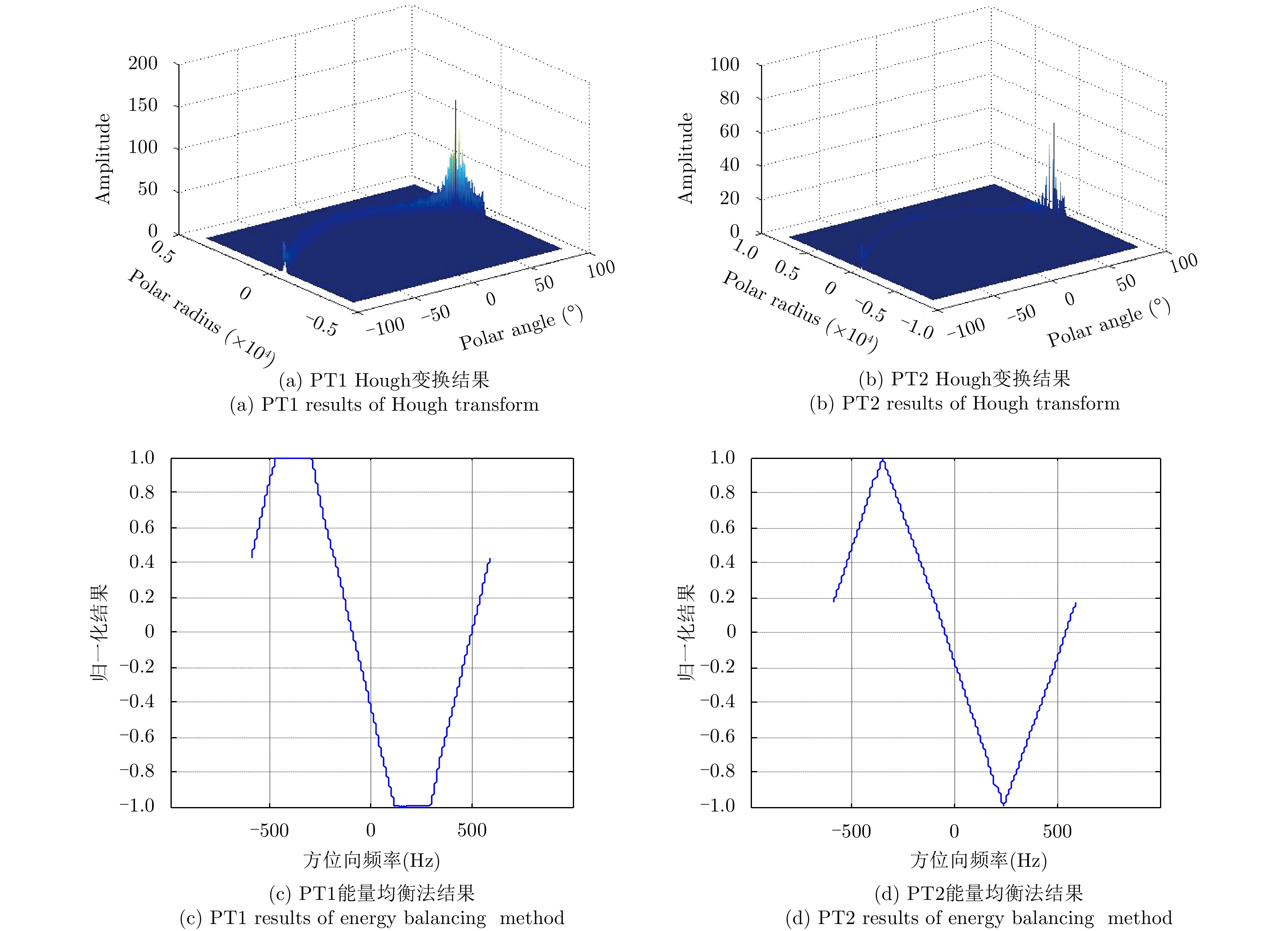
摘要: 距离徙动校正(RCMC)是机载单天线高分辨率合成孔径雷达(SAR)实现运动目标聚焦成像的关键环节。针对现有方法运算量大、精度低的缺点,该文提出一种结合参数估计分4步完成的RCMC方法。该方法首先通过结合能量均衡法的Hough变换估计距离向速度并校正距离走动,然后以初始方位向调频率校正距离弯曲,再采用Map-drift估计精确的方位向调频率,最后校正残余距离弯曲。与传统方法相比,该方法计算量较小,性能稳定,并能够校正高分辨率下不可忽略的残余距离弯曲。该文给出新方法的数学模型,并通过仿真和实际数据处理验证了该方法的有效性。Abstract: Range Cell Migration Correction (RCMC) represents an important advance in moving target imaging in the airborne single antenna high-resolution SAR system. In this paper, we propose a new four-step RCMC approach combined with parameter estimation that overcomes the drawbacks of high computation and low accuracy in high-resolution. First, we use the Hough transform and the energy balancing method to estimate the range velocity and correct the range walk. Next, we perform a range curvature correction in the range-Doppler domain by using the initial Doppler rate. Thirdly, we accurately estimate the Doppler rate using Map-drift technology. Finally, we correct the residual range curvature by the accurate Doppler rate. Compared with traditional algorithms, the proposed method requires less computation and is robust in the high-resolution SAR system. In this paper, we present a mathematical model and validate its effectiveness using both simulation and real data.
-
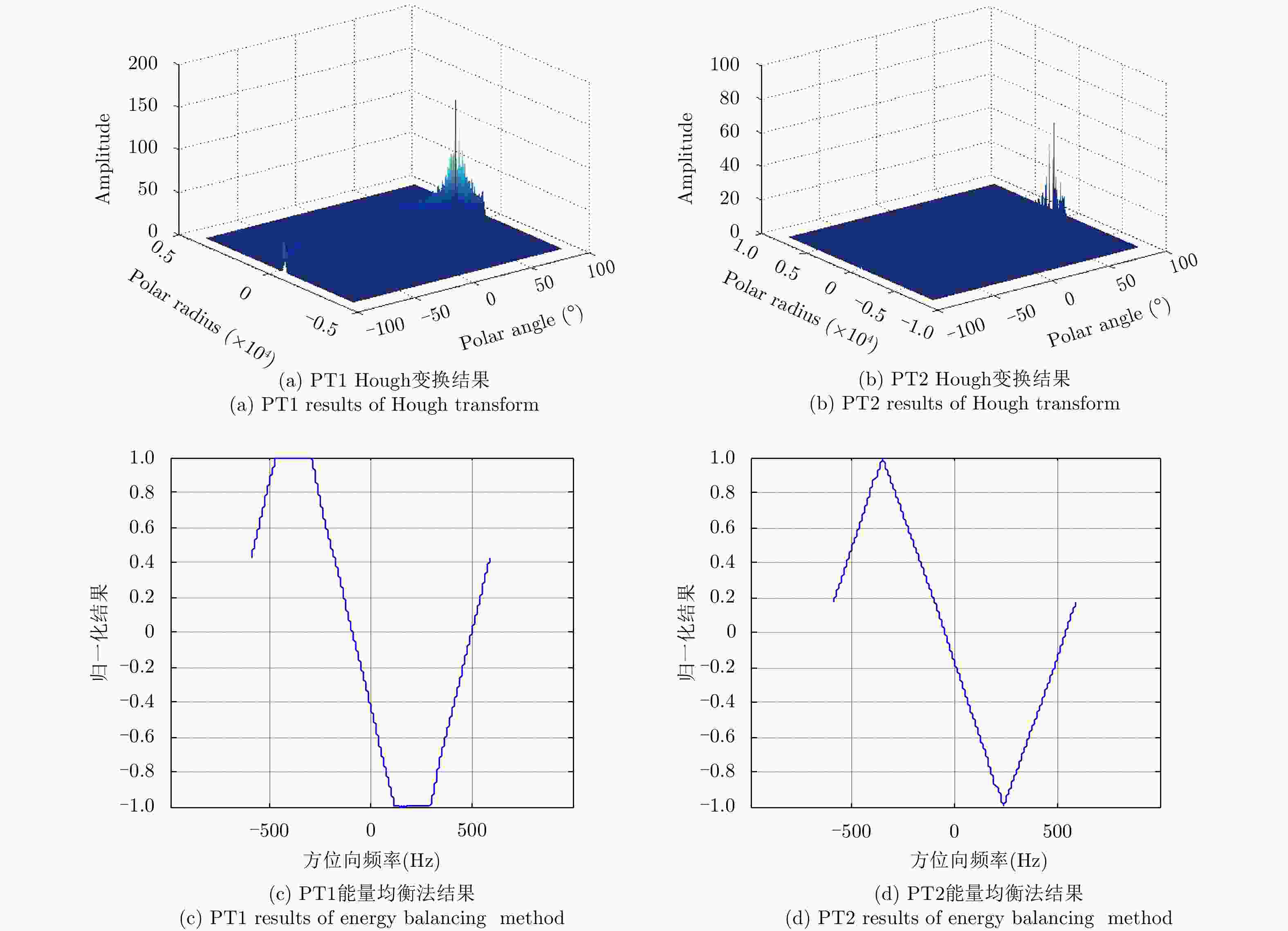
图 8 结合能量均衡法的Hough变换结果
Figure 8. Results of Hough transform with energy balancing method
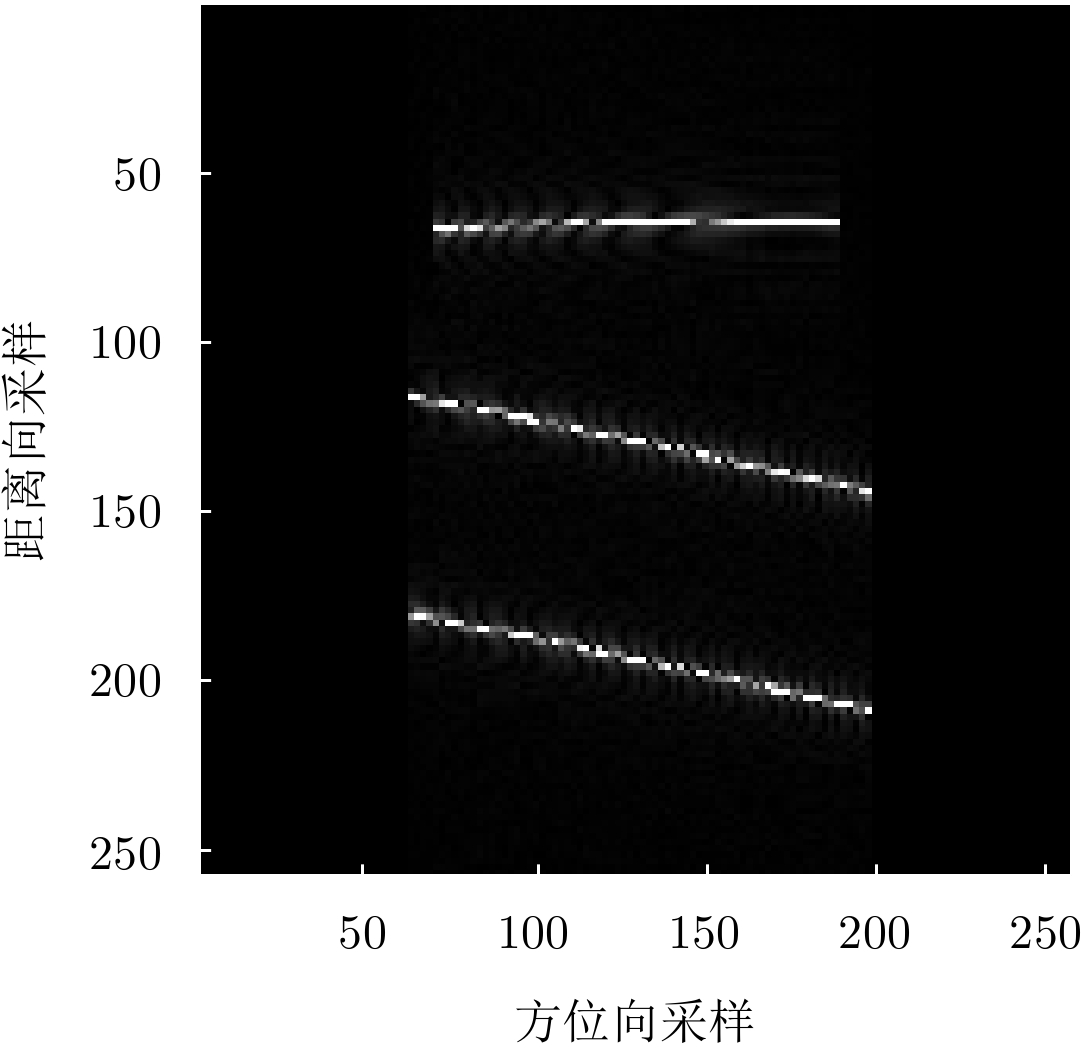
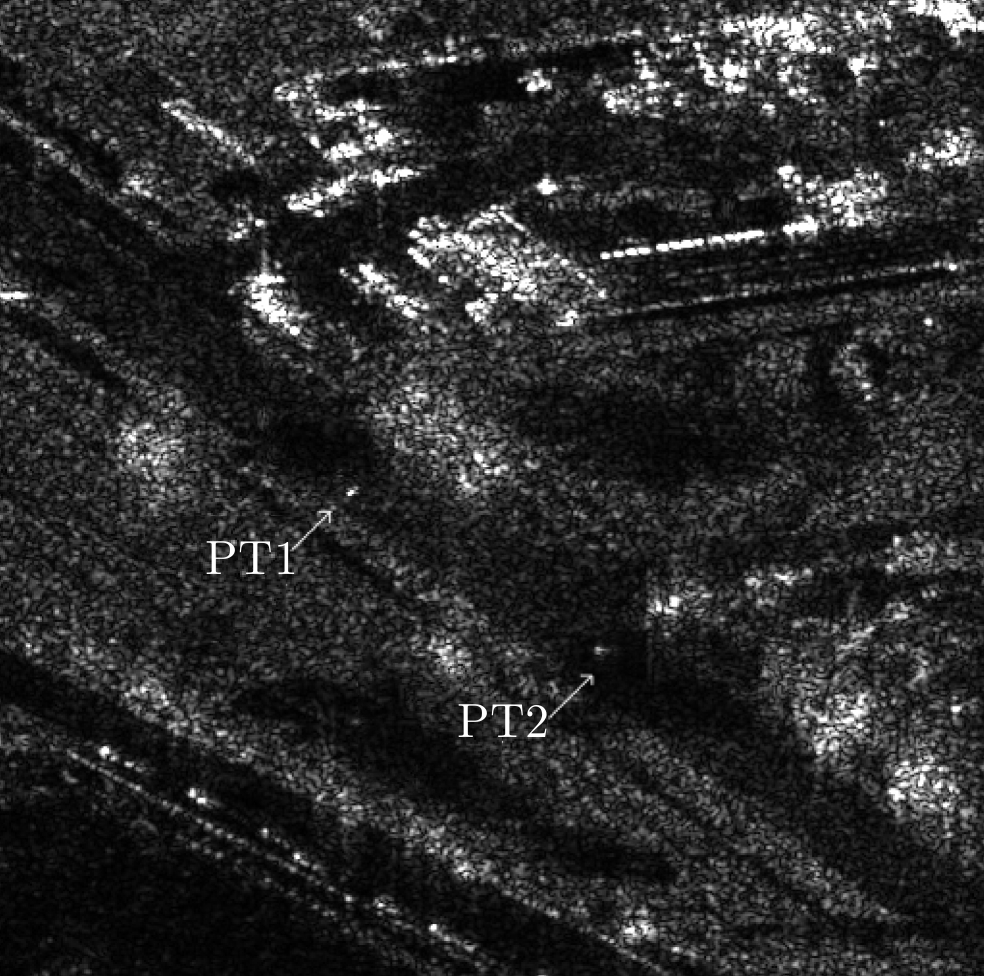
图 10 动目标精确成像并定位的合成SAR图像
Figure 10. Composite SAR image with stationary scenes and focused moving targets
表 1 雷达仿真参数
Table 1. Parameters of simulation
参数名称 参数值 距离向点数 2048 方位向点数 2048 中心频率(GHz) 15.6 距离向采样率(MHz) 750 信号带宽(MHz) 600 信号脉宽(μs) 1 飞机地速(m/s) 80 脉冲重复频率(Hz) 480 中心斜距(km) 5  下载: 导出CSV
下载: 导出CSV
表 2 目标仿真参数
Table 2. Parameters of simulated targets
目标编号 距离向速度
(m/s)方位向速度
(m/s)距离向加速度
(m/s2)目标1 –1 –1 0 目标2 10 10 0 目标3 10 10 –0.2
下载: 导出CSV
表 3 距离向速度估计结果
Table 3. Estimation results of range velocity
目标编号 Hough变换估计结果(m/s) Hough变换估计相对误差(%) 本文算法估计结果(m/s) 本文算法估计相对误差(%) 目标1 0.13 113.00 –0.98 2.00 目标2 10.45 4.50 10.03 0.30 目标3 10.04 0.40 10.02 0.20
下载: 导出CSV
表 4 方位向调频率估计结果
Table 4. Estimation results of azimuth frequency rate
目标编号 真实值(Hz/s) 本文算法估计
结果(Hz/s)本文算法估计
相对误差(%)目标1 137.88 138.03 0.11 目标2 101.92 102.11 0.19 目标3 80.09 80.22 0.16
下载: 导出CSV
表 5 算法运算时间
Table 5. Execution time of traditional method and proposed method
算法类别 算法步骤 执行时间(s) 常规算法 Keystone变换 36.43 距离弯曲粗校正 0.18 总时间 36.61 本文算法 Hough变换 0.53 多普勒中心估计 0.11 距离走动校正 0.26 距离弯曲粗校正 0.18 Map-drift 0.75 距离弯曲精校正 0.18 总时间 2.01
下载: 导出CSV
表 6 实测数据参数
Table 6. Parameters of real data
参数名称 参数值 距离向点数 800 方位向点数 32768 中心频率(GHz) 15.6 距离向采样率(MHz) 1000 信号带宽(MHz) 700 信号脉宽(μs) 60 飞机地速(m/s) 66 脉冲重复频率(Hz) 1200 中心斜距(km) 15
下载: 导出CSV
-
[1] 李道京, 张麟兮, 俞卞章. 近程SAR图像中的地面运动目标检测[J]. 西北工业大学学报, 2003, 21(6): 744–748. doi: 10.3969/j.issn.1000-2758.2003.06.026LI Dao-jing, ZHANG Lin-xi, and YU Bian-zhang. On detecting effectively ground moving target with single-antenna-single-channel short-range SAR[J]. Journal of Northwestern Polytechnical University, 2003, 21(6): 744–748. doi: 10.3969/j.issn.1000-2758.2003.06.026 [2] 周峰, 李亚超, 邢孟道, 等. 一种单通道SAR地面运动目标成像和运动参数估计方法[J]. 电子学报, 2007, 35(3): 543–548. doi: 10.3321/j.issn:0372-2112.2007.03.033ZHOU Feng, LI Ya-chao, XING Meng-dao, et al. An effective approach to ground moving target imaging and motion parameter estimation for single channel SAR system[J]. Acta Electronica Sinica, 2007, 35(3): 543–548. doi: 10.3321/j.issn:0372-2112.2007.03.033 [3] 汤立波, 李道京, 吴一戎, 等. 机载SAR的地面运动目标成像处理[J]. 系统工程与电子技术, 2005, 27(10): 1681–1684. doi: 10.3321/j.issn:1001-506X.2005.10.004TANG Li-bo, LI Dao-jing, WU Yi-rong, et al. Imaging of ground moving targets based on airborne SAR[J]. Systems Engineering and Electronics, 2005, 27(10): 1681–1684. doi: 10.3321/j.issn:1001-506X.2005.10.004 [4] PERRY R P, DIPIETRO R C, and FANTE R L. SAR imaging of moving targets[J]. IEEE Transactions on Aerospace and Electronic Systems, 1999, 35(1): 188–200. doi: 10.1109/7.745691 [5] ZHOU F, WU R B, XING M D, et al. Approach for single channel SAR ground moving target imaging and motion parameter estimation[J]. IET Radar, Sonar & Navigation, 2007, 1(1): 59–66. doi: 10.1049/iet-rsn.20060040 [6] 范健华, 李春林. 基于FPGA的Keystone变换算法设计和实现[J]. 电子科技, 2016, 29(6): 54–57. doi: 10.16180/j.cnki.issn1007-7820.2016.06.016FAN Jian-hua and LI Chun-lin. Design and implementation of Keystone transform based on FPGA[J]. Electronic Science and Technology, 2016, 29(6): 54–57. doi: 10.16180/j.cnki.issn1007-7820.2016.06.016 [7] CAO Y F, QU X G, and HUANG P K. Research on Keystone formatting based on non-baseband interpolation[J]. Journal of Systems Engineering and Electronics, 2010, 21(4): 562–565. doi: 10.3969/j.issn.1004-4132.2010.04.006 [8] 朱圣棋, 廖桂生, 曲毅, 等. 机载正侧视合成孔径雷达地面运动目标参数估计方法[J]. 电子学报, 2010, 38(12): 2757–2762.ZHU Sheng-qi, LIAO Gui-sheng, QU Yi, et al. An approach of ground moving target motion parameter estimation for airborne sidelooking SAR system[J]. Acta Electronica Sinica, 2010, 38(12): 2757–2762. [9] LI Y K, WANG Y F, and LIU C. Detect and autofocus the moving target by its range walk in time domain[C]. Proceedings of 2011 International Conference on Wireless Communications and Signal Processing, Nanjing, 2011: 1–5. doi: 10.1109/WCSP.2011.6096755. [10] 汤立波. 高分辨率机载SAR地面/海面运动目标成像技术研究[D]. [博士论文], 中国科学院电子学研究所, 2006: 53–54.TANG Li-bo. Imaging techniques of ground/sea moving targets for high resolution airborne SAR[D]. [Ph.D. dissertation], Institute of Electrics, Chinese Academy of Sciences, 2006: 53–54. [11] CUMMING I G and WONG F H. Digital Processing of Synthetic Aperture Radar Data: Algorithms and Implementation[M]. Boston: Artech House Publishers, 2005: 337, 165. [12] CANTALLOUBE H M J and NAHUM C E. Multiscale local map-drift-driven multilateration SAR autofocus using fast polar format image synthesis[J]. IEEE Transactions on Geoscience and Remote Sensing, 2011, 49(10): 3730–3736. doi: 10.1109/TGRS.2011.2161319 [13] WAHL D E, EICHEL P H, GHIGLIA D C, et al. Phase gradient autofocus—A robust tool for high resolution SAR phase correction[J]. IEEE Transactions on Aerospace and Electronic Systems, 1994, 30(3): 827–835. doi: 10.1109/7.303752 [14] FREEMAN A and CURRIE A. Synthetic aperture radar (SAR) images of moving targets[J]. GEC Journal of Research, 1987, 5(2): 106–115. doi: 10.1117/12.932852 -


计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

