
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
Height Measurement for Meter-wave MIMO Radar Based on Block Orthogonal Matching Pursuit Preprocessing
-
摘要: 米波雷达具有很好的反隐身性能。多输入多输出(MIMO)雷达的波形分集具有高自由度特点,使MIMO雷达在检测和参数估计等方面具有更多优势,故米波MIMO雷达受到广泛研究。而测高是米波MIMO雷达最重要的问题之一。针对米波MIMO雷达测高问题,最大似然和广义多重信号分类方法是米波MIMO阵列雷达测高方法行之有效的算法,但其计算量大,工程中难以接受。该文提出一种基于块正交匹配追踪(BOMP)预处理的方法来降低计算量。首先对MIMO阵列接收数据稀疏化处理,然后通过数学操作将其变形至适合于BOMP算法的信号模型,然后利用粗栅格得到角度粗估计。并以此为初始值中心,取MIMO雷达波束宽度作为搜索范围。仿真结果表明该算法能有效降低搜索类测高算法的计算量。
-
关键词:
- 米波多输入多输出雷达 /
- 测高 /
- 块正交匹配追踪 /
- 最大似然 /
- 广义多重信号分类
Abstract: Meter-wave radar has good anti-stealth performance. The waveform diversity of Multiple-Input Multiple-Output (MIMO) radar can result in a higher degree of freedom, which makes MIMO radar more advantageous in detection and parameter estimation. Therefore, meter-wave MIMO radar has been widely studied. The radar height measurement is one of the most important research problems of the meter-wave MIMO radar. The maximum likelihood and generalized multiple signal classification algorithms are effective for measuring the radar height. However, they feature heavy computation complexity. In this paper, a preprocessing method based on Block Orthogonal Matching Pursuit (BOMP) is proposed to reduce the computation. First, the received data of MIMO array are sparse-processed, and then, using a mathematical operation, they are transformed into a signal model suitable for the BOMP algorithm; then coarse angle estimation is obtained using a large search grid. The coarse angle estimation is taken as the initial value, and the MIMO radar beam width as the search range. The simulation results show that the proposed algorithm can effectively reduce the computation of the search-type height measurement algorithm. -

图 1 米波MIMO雷达低仰角测高镜面反射模型示意图
Figure 1. Schematic diagram of height measurement of low elevation target with meter wave MIMO radar under specular reflection model
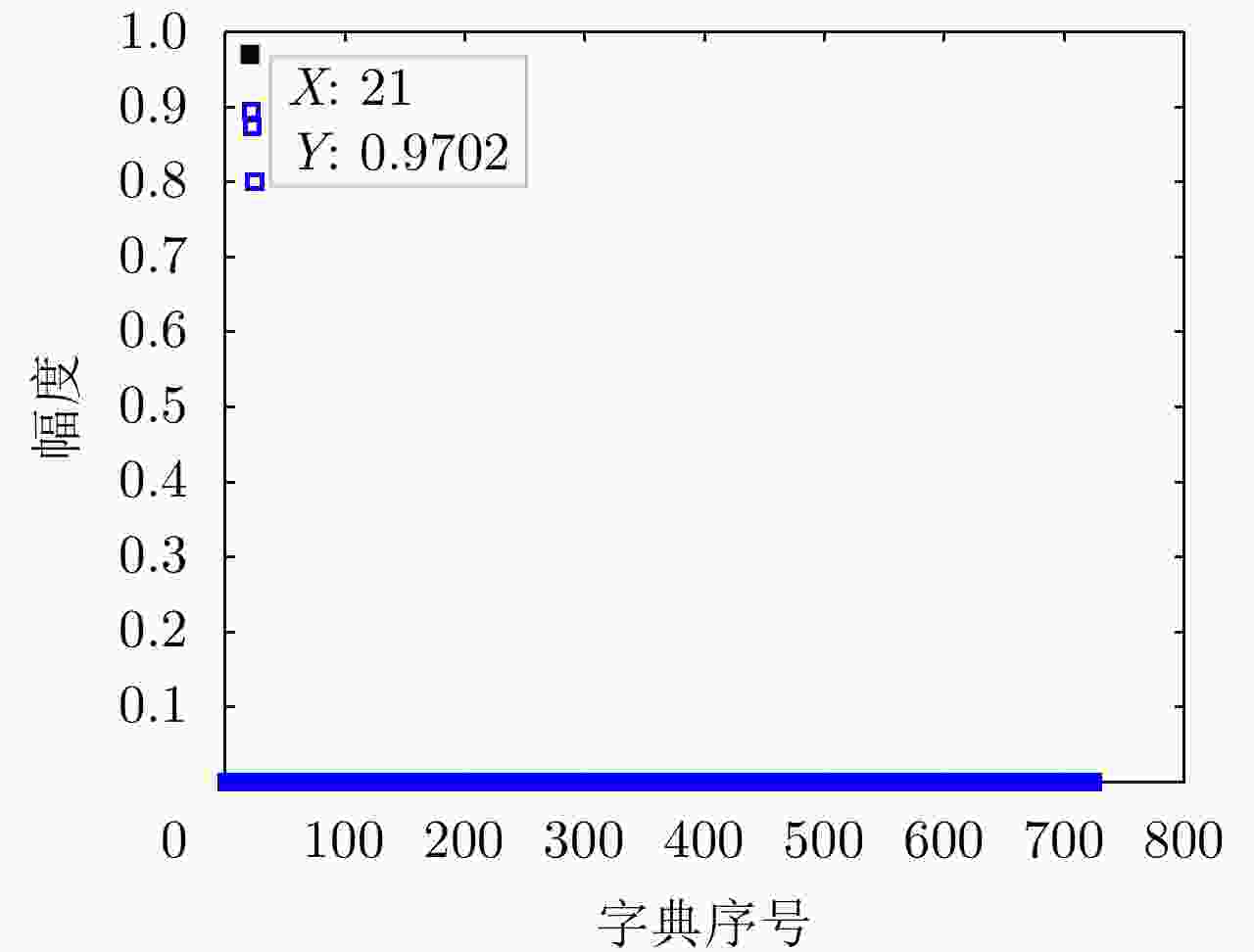
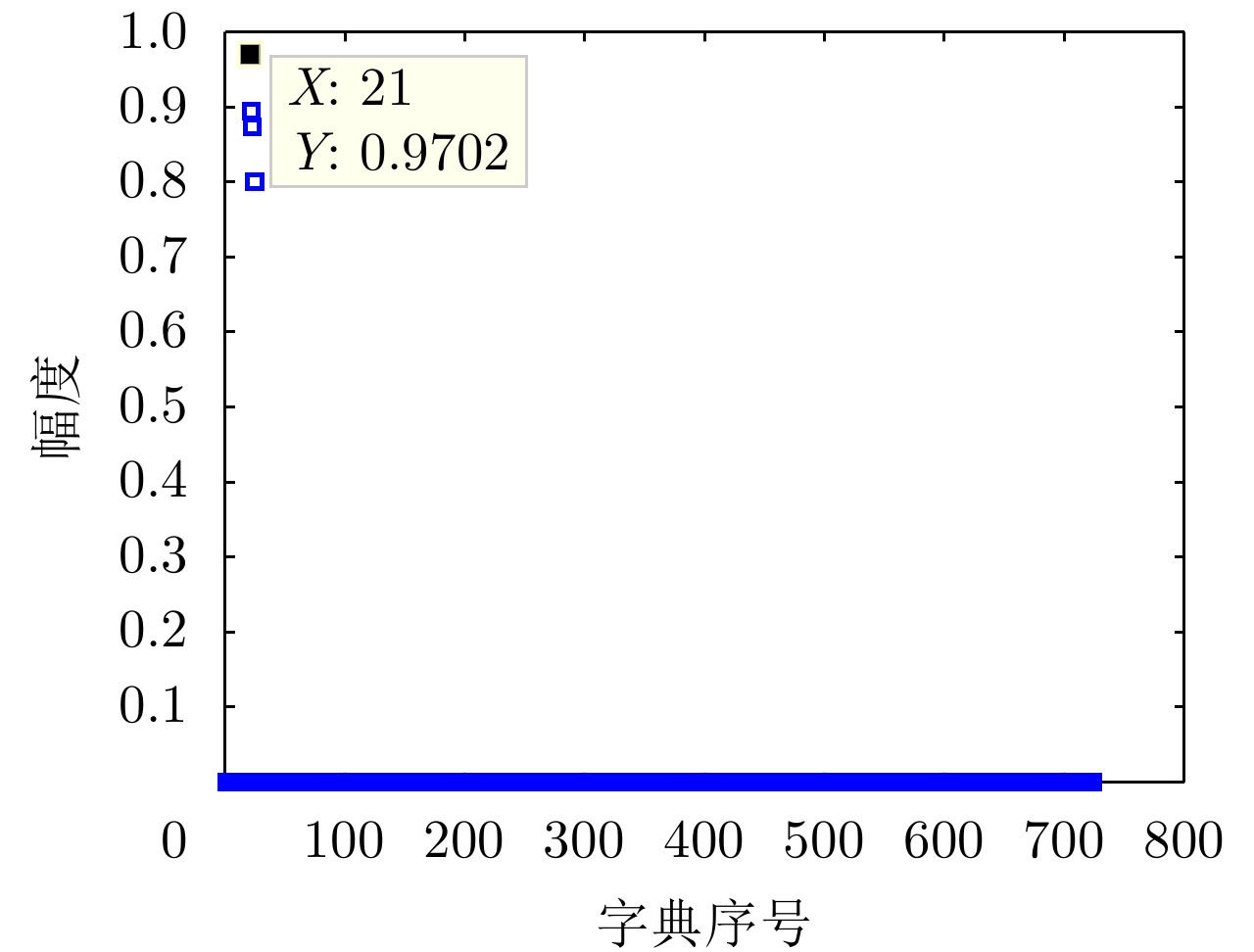
图 2 基于BOMP稀疏恢复的支撑位置估计结果
Figure 2. Support position estimation results based on BOMP sparse recovery algorithm
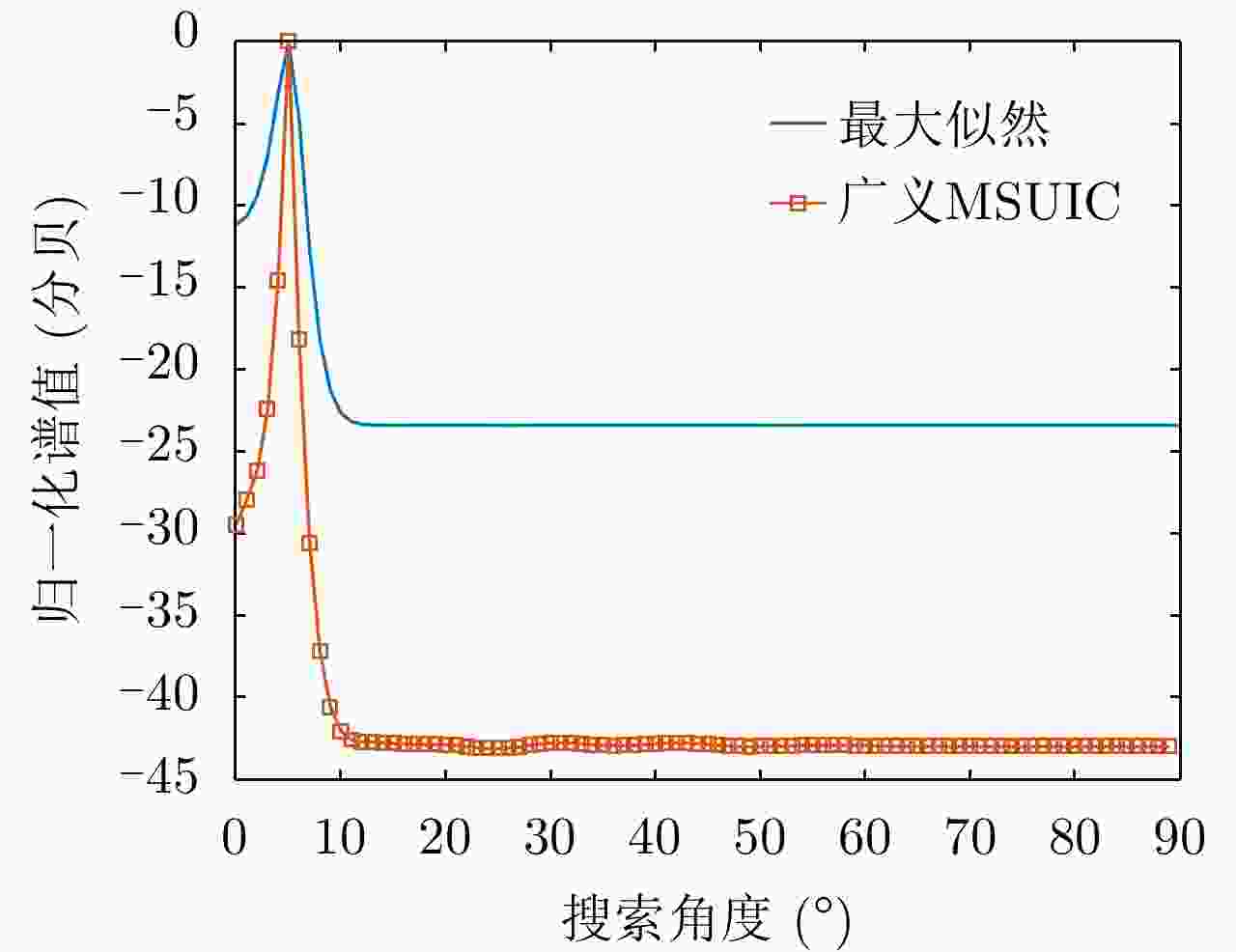
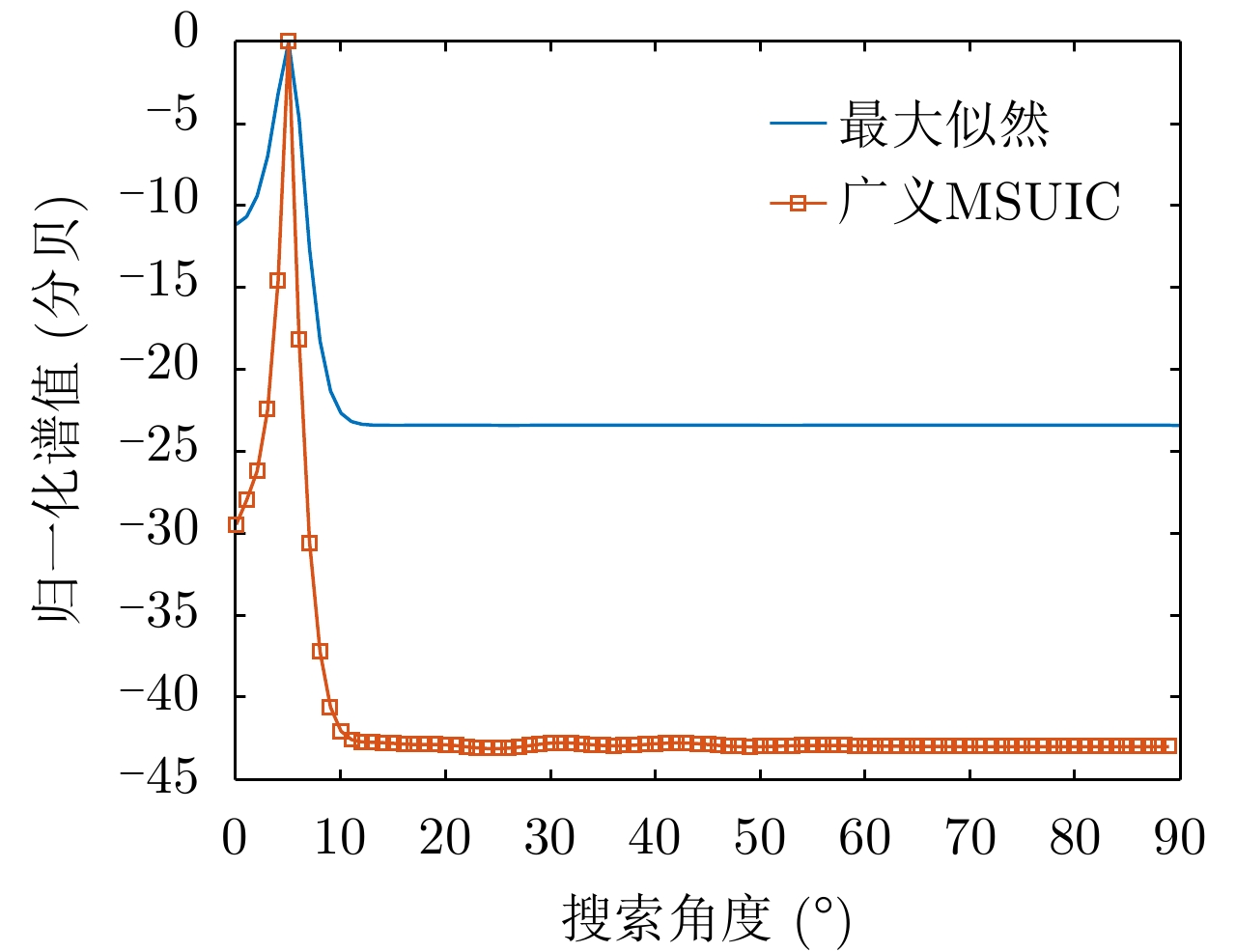
图 3 最大似然和广义MUSIC的全空域搜索估计结果
Figure 3. Estimation results of maximum likelihood and generalized MUSIC under whole airspace searching
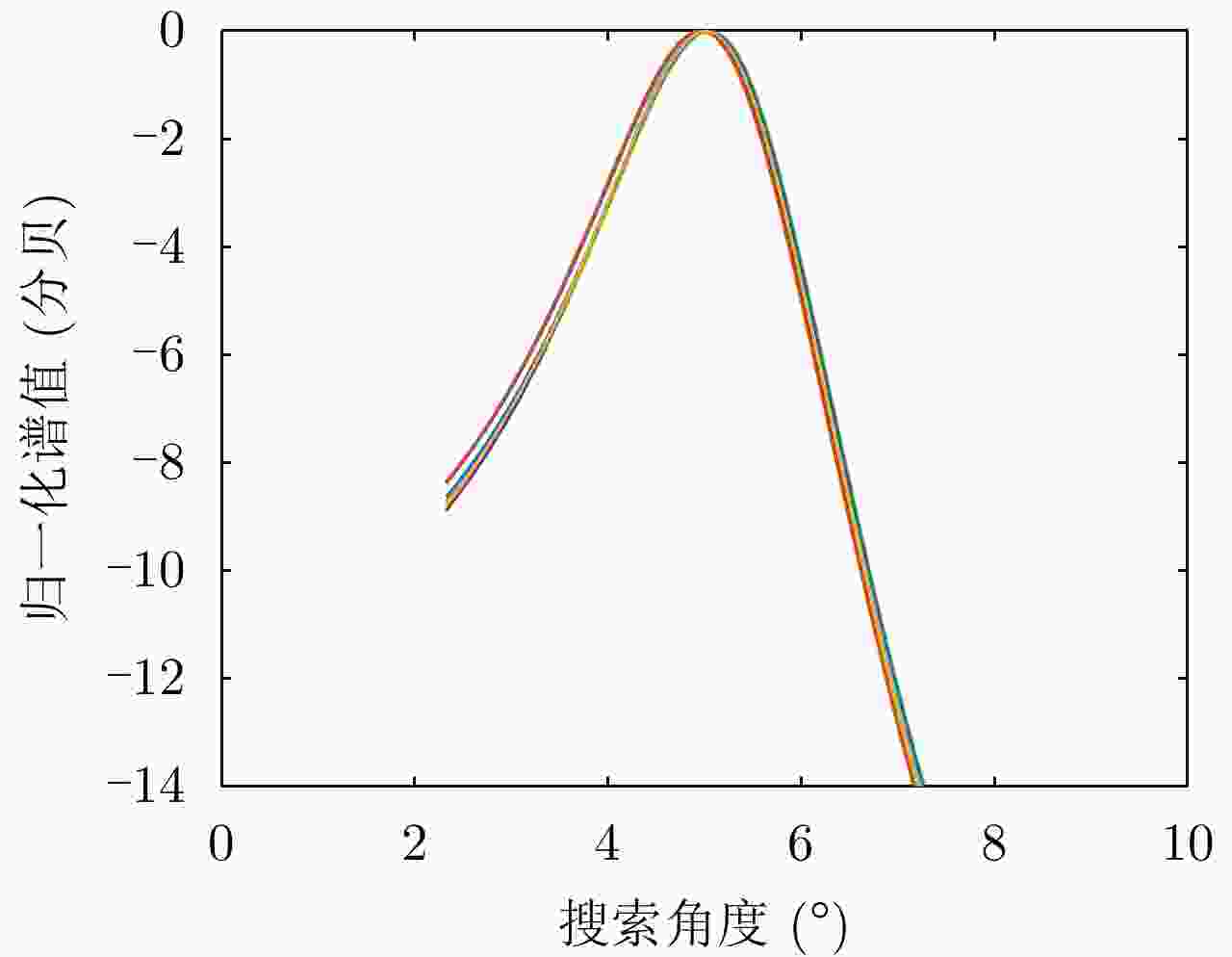
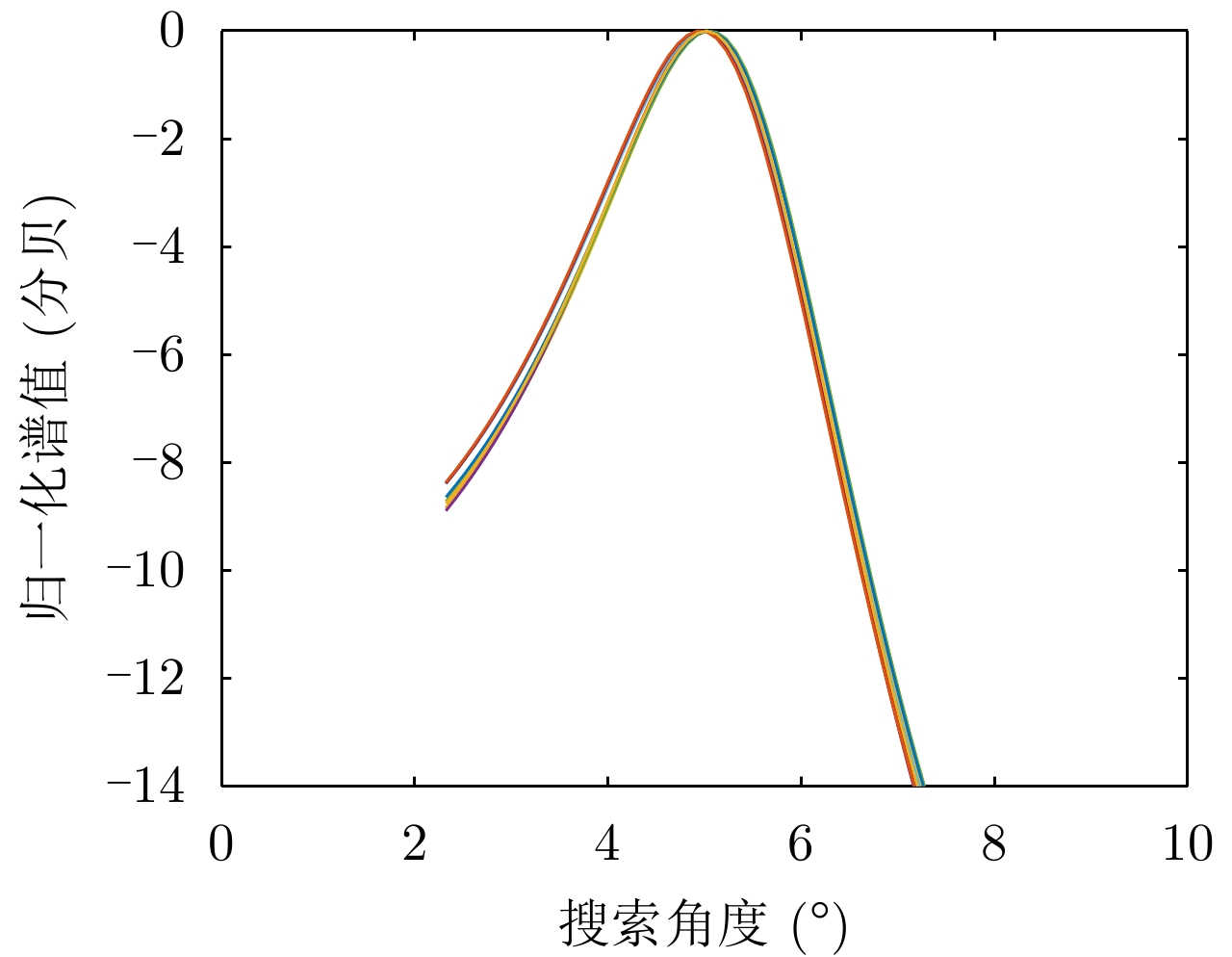
图 4 10次独立实验的基于BOMP预处理后最大似然的搜索范围结果
Figure 4. 10 independent experiments results based on maximum likelihood after BOMP preprocessing
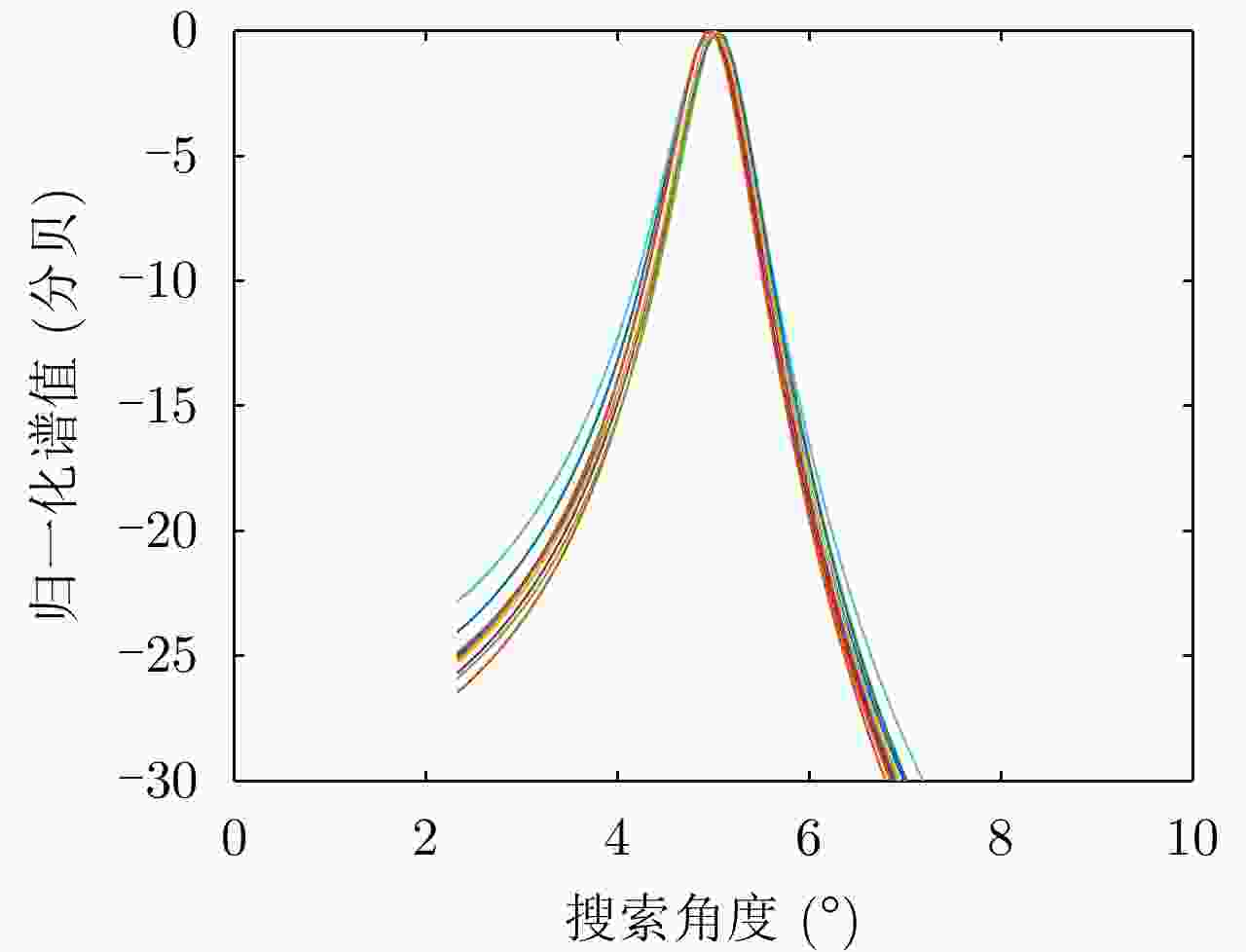
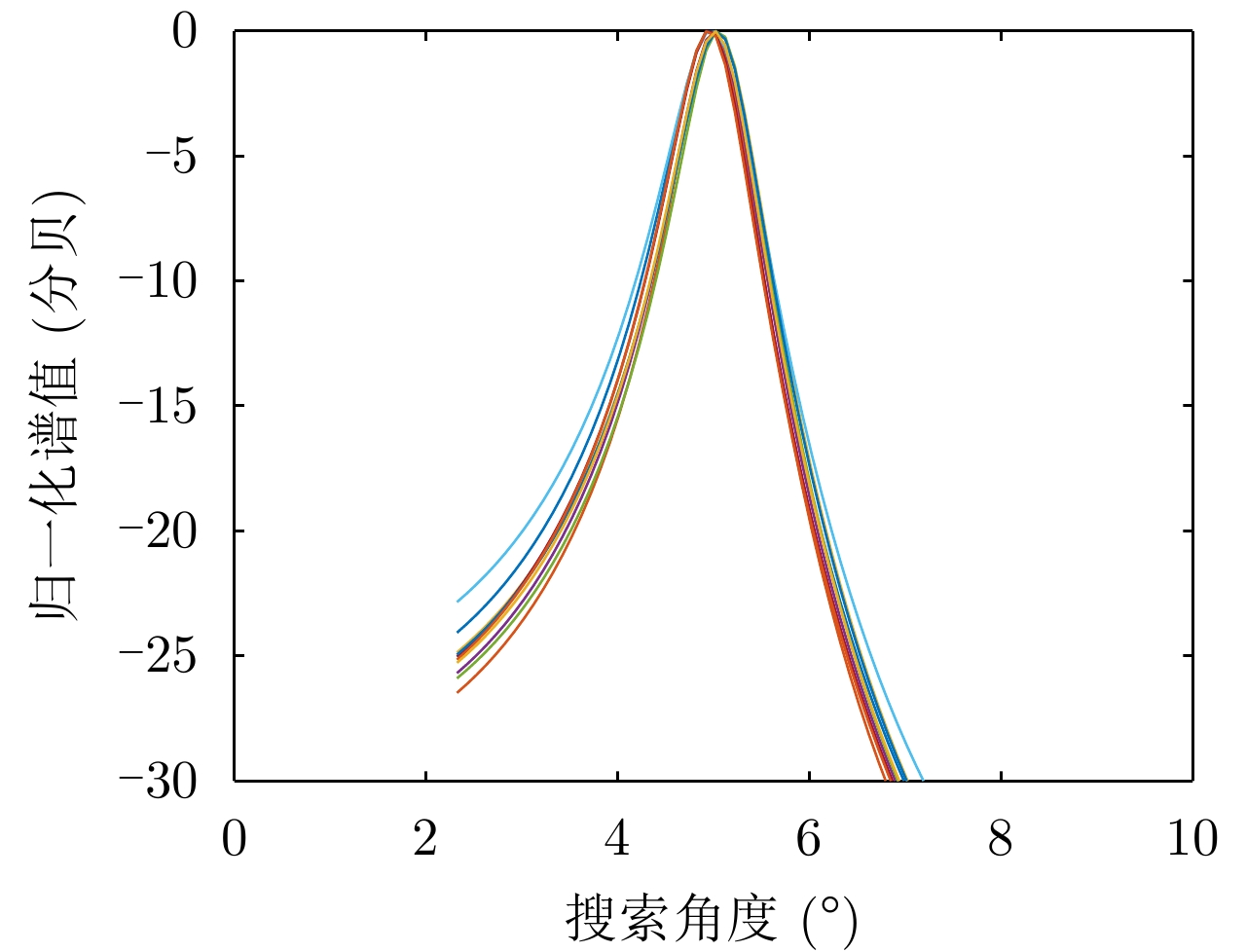
图 5 10次独立实验的基于BOMP预处理后广义MUSIC的搜索范围结果
Figure 5. 10 independent experiments results based on generalized MUSIC after BOMP preprocessing

图 6 最大似然和广义MUSIC算法的角度估计RMSE
Figure 6. RMSE of angle estimation with maximum likelihood and generalized MUSIC algorithms
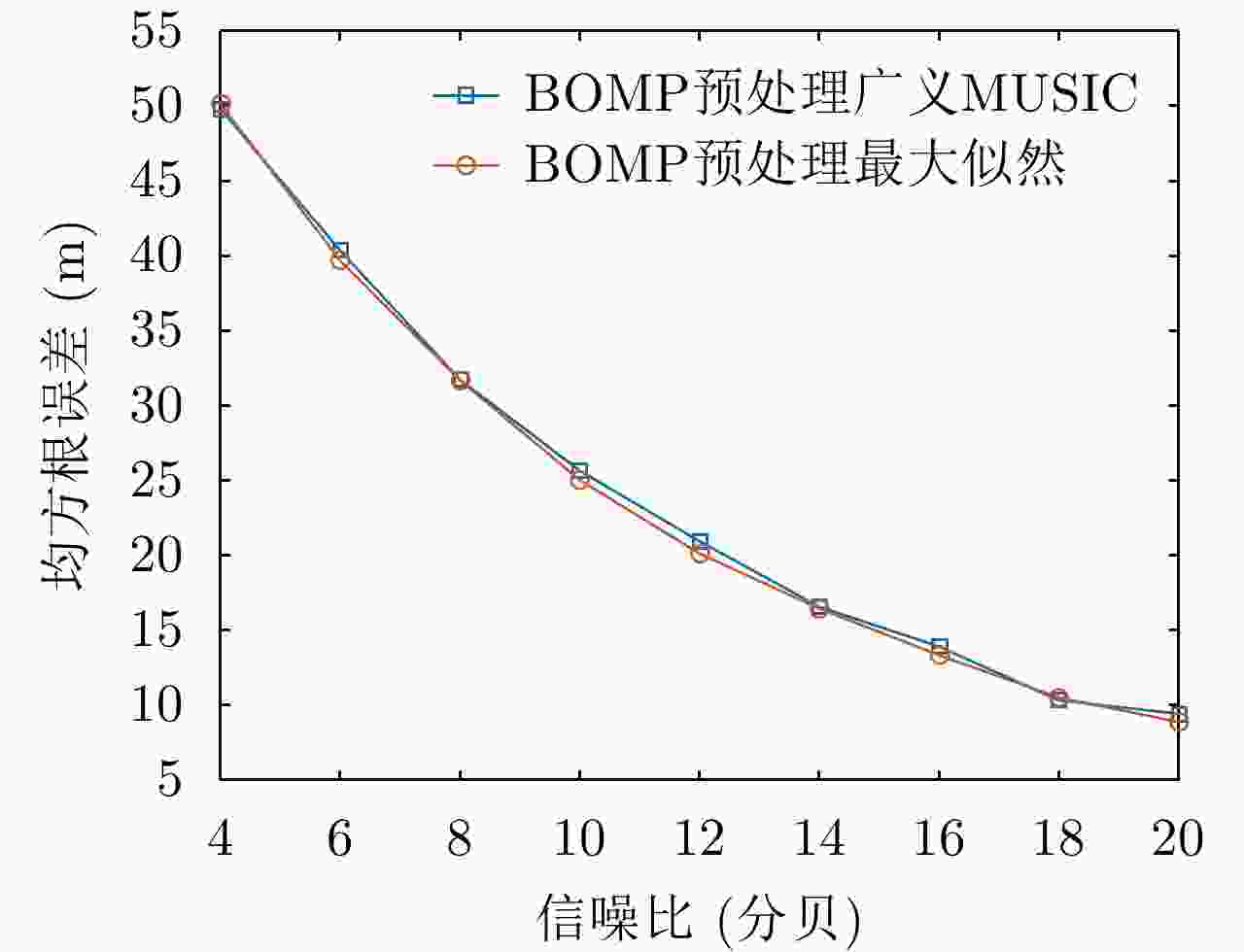
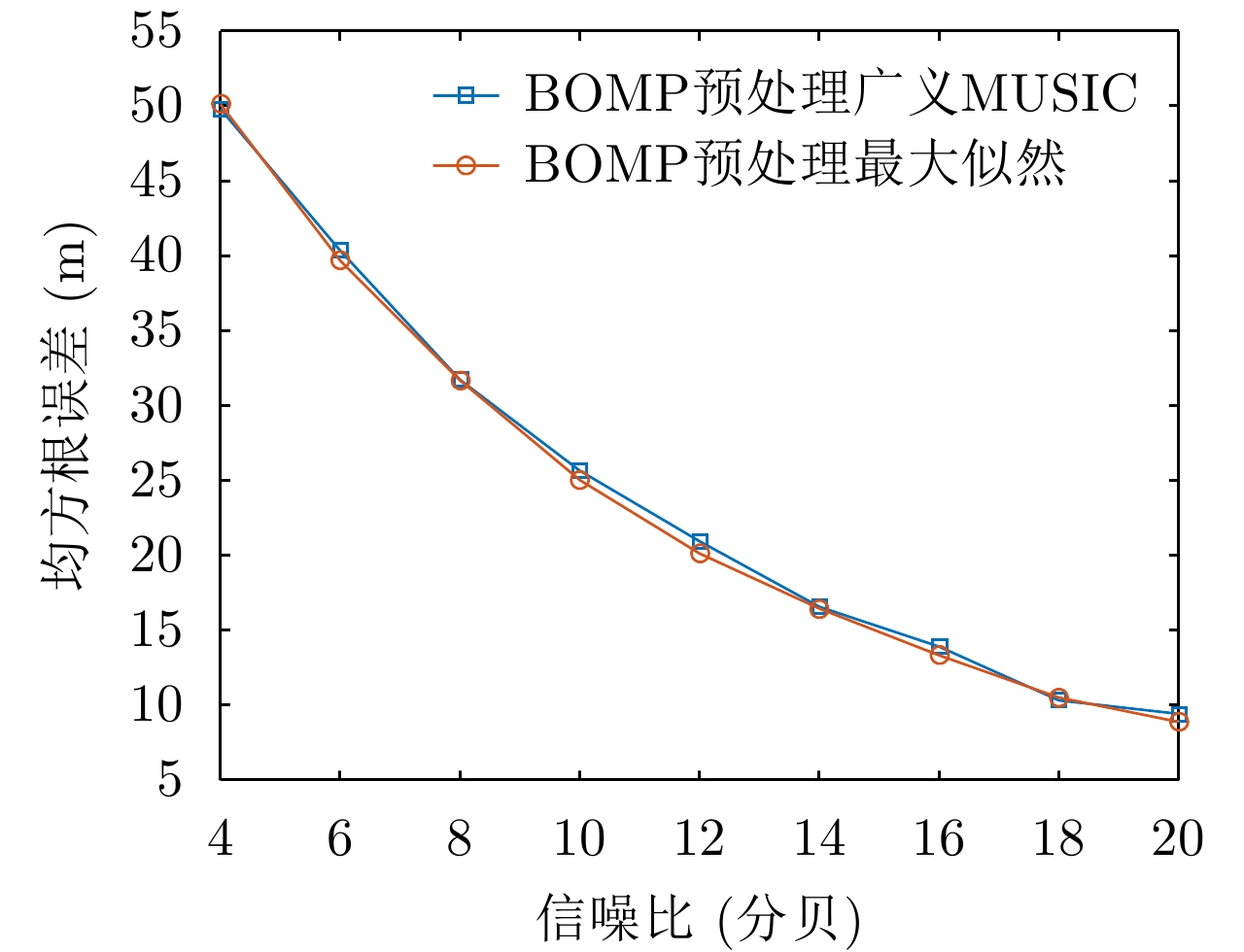
图 7 最大似然和广义MUSIC算法的高度测量RMSE
Figure 7. RMSE of height measurement with maximum likelihood and generalized MUSIC algorithms
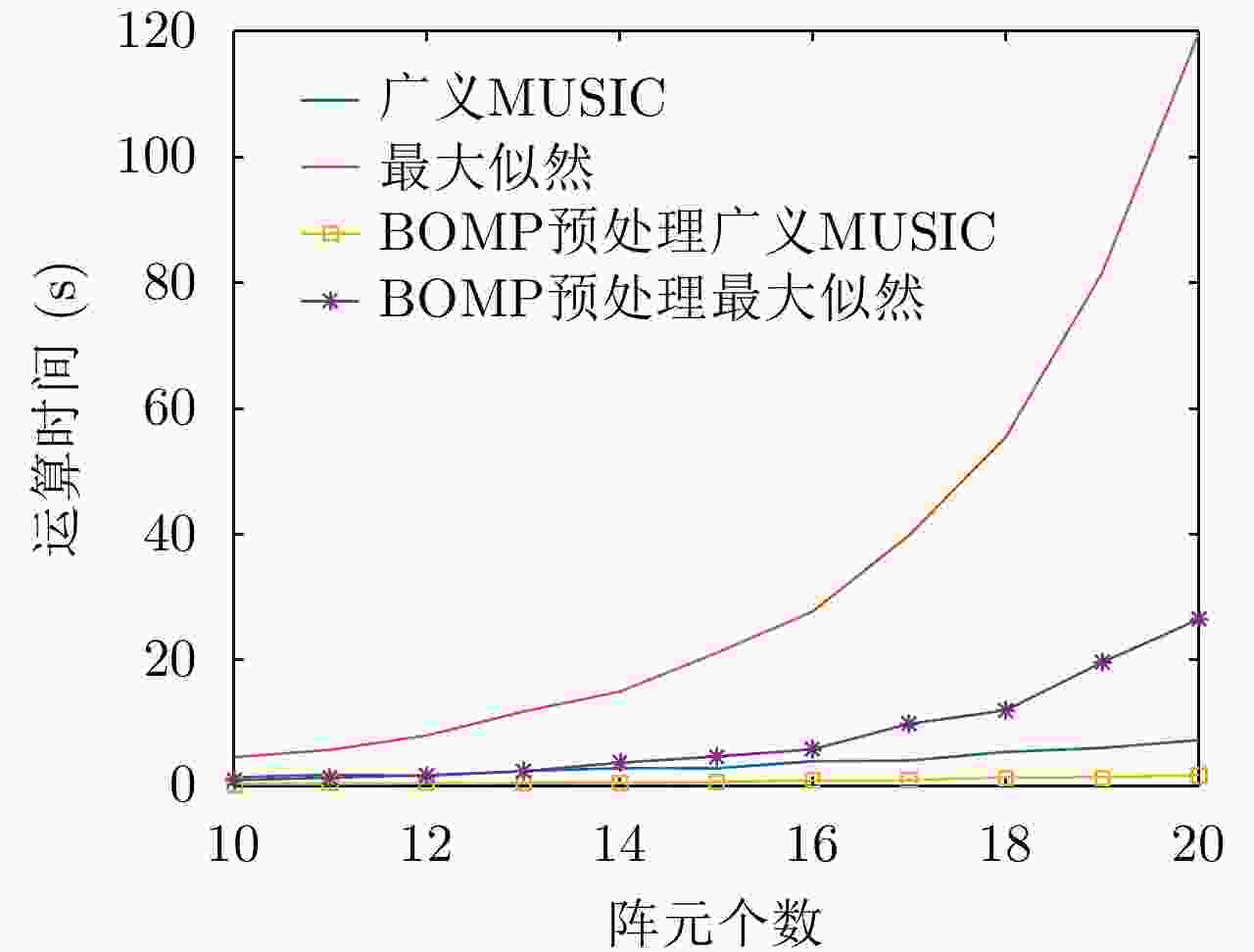
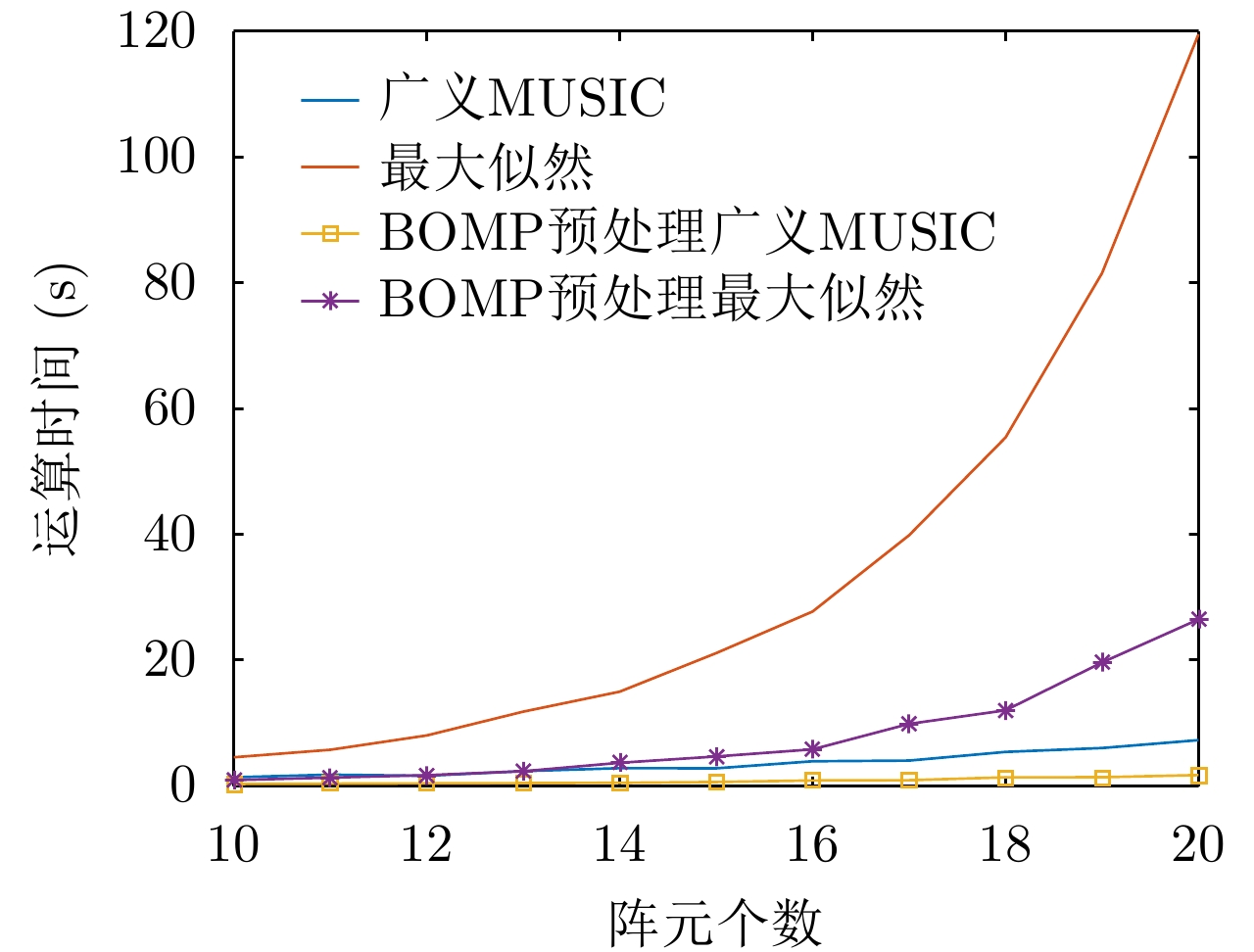
图 8 预处理和非预处理算法运算时间比较结果
Figure 8. Comparison results of run time of preprocessing and non-preprocessing algorithms
表 1 阵列雷达噪声子空间和导向矢量、导向矩阵的正交性
Table 1. Orthogonality of noise subspace of array radar and steering vector, manifold matrix
噪声子空间 导向矢量 导向矩阵(信号子空间) 常规阵列雷达 正交(MUSIC) 正交(广义MUSIC) MIMO阵列雷达 不正交(MUSIC) 正交(广义MUSIC)  下载: 导出CSV
下载: 导出CSV
表 2 BOMP算法的计算流程
Table 2. Calculation process of BOMP algorithm
输入:匹配滤波后的矢量化数据、角度网格数、目标数。 初始化:用接收数据初始化残差、用角度网格数初始化字典、初
始化支撑集。迭代:(1) 利用残差和字典计算投影; (2) 根据投影寻找块最大的坐标值,并将此值坐标放入块
支撑集;(3) 利用块支撑集更新残差; (4) 迭代(1)至(3),迭代次数达到目标数停止。 输出:利用块支撑集计算块支撑向量。
下载: 导出CSV
-
[1] KUSCHEL H. VHF/UHF radar. 1. Characteristics[J]. Electronics & Communication Engineering Journal, 2002, 14(2): 61–72. [2] KUSCHEL H. VHF/UHF radar Part 2: Operational aspects and applications[J]. Electronics & Communication Engineering Journal, 2002, 14(3): 101–111. [3] LIU Yuan, LIU Hongwei, XIA Xianggen, et al. Projection techniques for altitude estimation over complex multipath condition-based VHF radar[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2018, 11(7): 2362–2374. doi: 10.1109/JSTARS.2018.2835448 [4] 王胜华. 雷达低仰角目标检测与测高关键技术研究[D]. [博士论文], 西安电子科技大学, 2019.WANG Shenghua. Research on key technology of low angle radar target detection and elevation measurement[D]. [Ph. D. dissertation], Xidian University, 2019. [5] 谭俊. 米波雷达低仰角测角中多径效应影响抑制及关键技术研究[D]. [博士论文], 电子科技大学, 2019.TAN Jun. Research on multipath effect suppression and key technologies in low-angle measurement of meter wave radar[D]. [Ph. D. dissertation], University of Electronic Science and Technology of China, 2019. [6] XIANG Houhong, CHEN Baixiao, YANG Minglei, et al. Altitude measurement based on characteristics reversal by deep neural network for VHF radar[J]. IET Radar, Sonar & Navigation, 2019, 13(1): 98–103. [7] 陆鹏程, 吴剑旗. 米波MIMO雷达系统设计的几个问题[J]. 雷达科学与技术, 2017, 15(3): 236–240, 246.LU Pengcheng and WU Jianqi. Some issues on VHF MIMO radar system design[J]. Radar Science and Technology, 2017, 15(3): 236–240, 246. [8] 刘俊, 刘峥, 谢荣, 等. 基于波束空间的米波MIMO雷达角度估计算法[J]. 电子学报, 2011, 39(9): 1961–1966.LIU Jun, LIU Zheng, XIE Rong, et al. Beam-space domain angle estimation algorithm in VHF MIMO radar[J]. Acta Electronica Sinica, 2011, 39(9): 1961–1966. [9] 谢荣, 刘铮, 刘俊. 基于矩阵束的MIMO雷达低仰角快速估计方法[J]. 电子与信息学报, 2011, 33(8): 1833–1838. doi: 10.3724/SP.J.1146.2010.01242XIE Rong, LIU Zheng, and LIU Jun. Fast algorithm for low elevation estimation based on matrix pencil in MIMO radar[J]. Journal of Electronics &Information Technology, 2011, 33(8): 1833–1838. doi: 10.3724/SP.J.1146.2010.01242 [10] 刘源, 王洪先, 纠博, 等. 米波MIMO雷达低空目标波达方向估计新方法[J]. 电子与信息学报, 2016, 38(3): 622–628. doi: 10.11999/JEIT150555LIU Yuan, WANG Hongxian, JIU Bo, et al. A new method for DOA estimation for VHF MIMO radar in low-angle tracking environment[J]. Journal of Electronics &Information Technology, 2016, 38(3): 622–628. doi: 10.11999/JEIT150555 [11] LIU Yuan, JIU Bo, XIA Xianggen, et al. Height measurement of low-angle target using MIMO radar under multipath interference[J]. IEEE Transactions on Aerospace and Electronic Systems, 2018, 54(2): 808–818. doi: 10.1109/TAES.2017.2767919 [12] 吴向东, 赵永波, 张守宏, 等. 一种MIMO雷达低角跟踪环境下的波达方向估计新方法[J]. 西安电子科技大学学报: 自然科学版, 2008, 35(5): 793–798.WU Xiangdong, ZHAO Yongbo, ZHANG Shouhong, et al. New method for DOA estimation for the MIMO radar in low-angle tracking environment[J]. Journal of Xidian University:Natural Science, 2008, 35(5): 793–798. [13] LIU J, LIU Z, and XIE R. Low angle estimation in MIMO radar[J]. Electronics Letters, 2010, 46(23): 1565–1566. doi: 10.1049/el.2010.2579 [14] TAN Jun and NIE Zaiping. Polarisation smoothing generalised MUSIC algorithm with PSA monostatic MIMO radar for low angle estimation[J]. Electronics Letters, 2018, 54(8): 527–529. doi: 10.1049/el.2017.4378 [15] ELDAR Y C, KUPPINGER P, and BOLCSKEI H. Block-sparse signals: Uncertainty relations and efficient recovery[J]. IEEE Transactions on Signal Processing, 2010, 58(6): 3042–3054. doi: 10.1109/TSP.2010.2044837 [16] 王永良, 陈辉, 彭应宁, 等. 空间谱估计理论与算法[M]. 北京: 清华大学出版社, 2004.WANG Yongliang, CHEN Hui, PENG Yingning, et al. Theory and Methods of Spatial Spectrum Estimation[M]. Beijing: Tsinghua University Press, 2004. [17] 刘源. 米波数字阵列雷达低仰角测高方法研究[D]. [博士论文], 西安电子科技大学, 2018.LIU Yuan. Study on low-angle altitude measurement in VHF radar[D]. [Ph. D. dissertation], Xidian University, 2018. -



计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

