
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
An Ultra-high-resolution Microwave Photonic-based SAR Image Method Based on Space-variant Motion Error Analysis
-
摘要: 针对运动误差空变对实现微波光子雷达超高分辨SAR成像的影响,该文提出了一种基于空变运动误差分析的超高分辨成像方法。首先通过解析求解获得中心波束平面补偿下的剩余空变误差表达式,提出了运动误差空变影响判定准则。接着针对微波光子SAR系统条件的不同判定结果,提出相应的成像流程。最后对所提判定准则与成像方法进行点仿真验证,并对录取的车载10 GHz微波光子超高分辨SAR实测数据进行分析与成像处理,实验结果表明所提方法的有效性。Abstract: An ultrahigh-resolution microwave photonic-based Synthetic Aperture Radar (SAR) imaging method based on space-variant motion error analysis is proposed to solve the influence of space-variant motion error on microwave photonic-based SAR imaging. First, the judgment rules of the influence of space-variant motion error are proposed to analyze the residual space-variant motion error. Second, on the basis of the different judgment results of microwave photonic-based SAR system conditions, the corresponding imaging process is proposed. Finally, the proposed judgment rules and imaging method are verified by point simulation, and the measured data of the 10 GHz microwave photonic-based ultrahigh-resolution SAR are analyzed and imaged. The experimental results show the effectiveness of the proposed method.
-

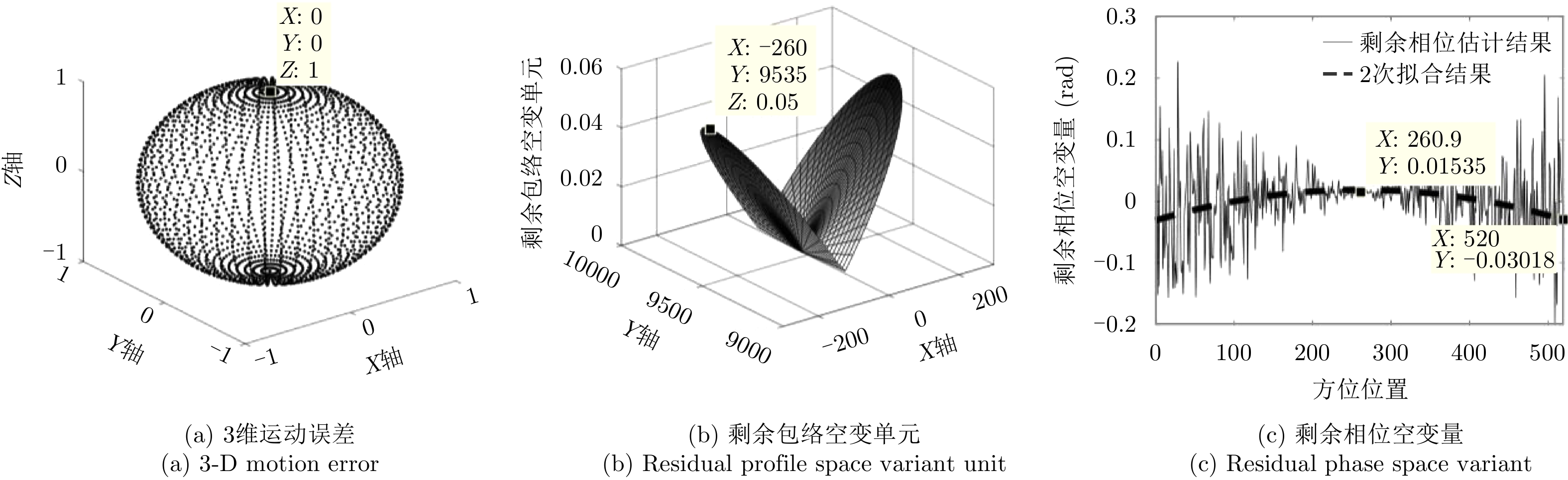
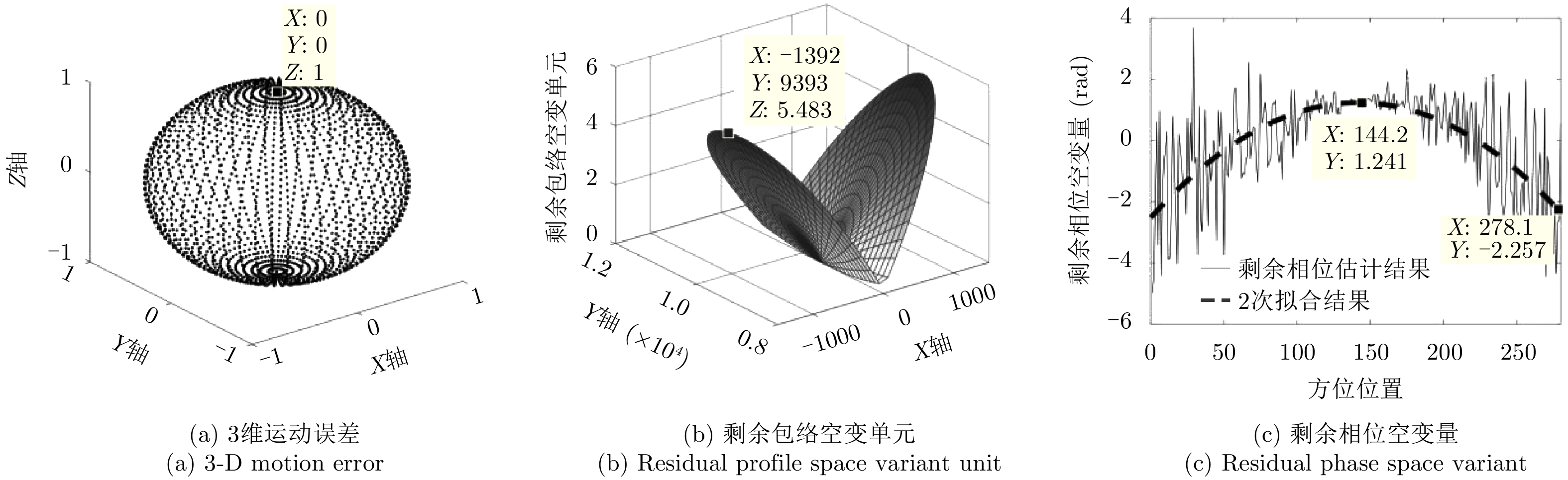
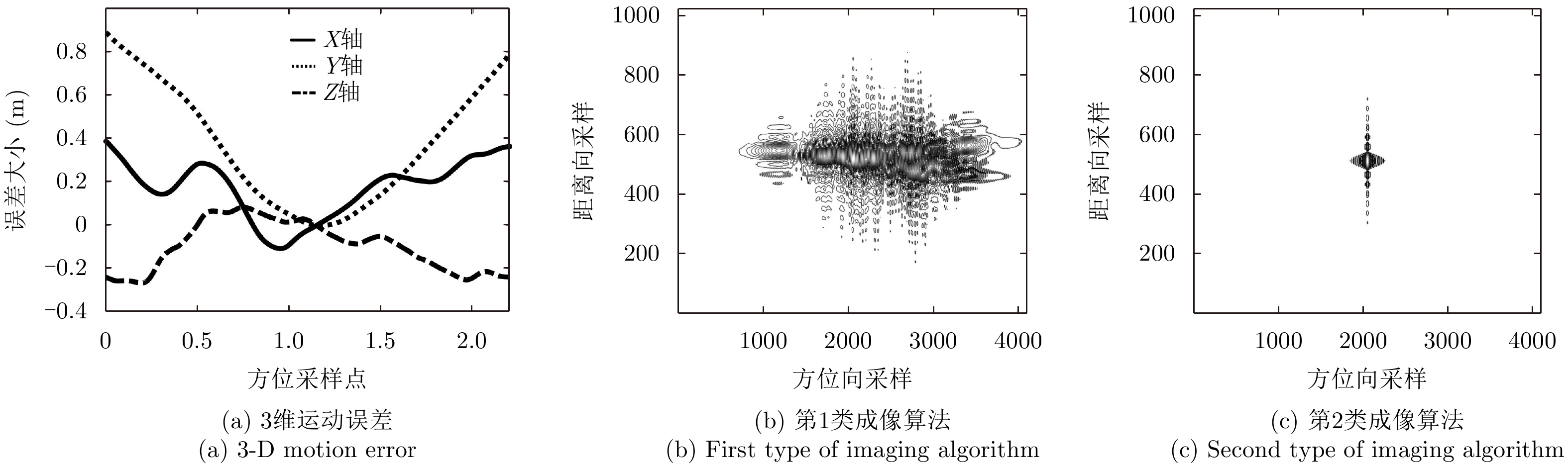
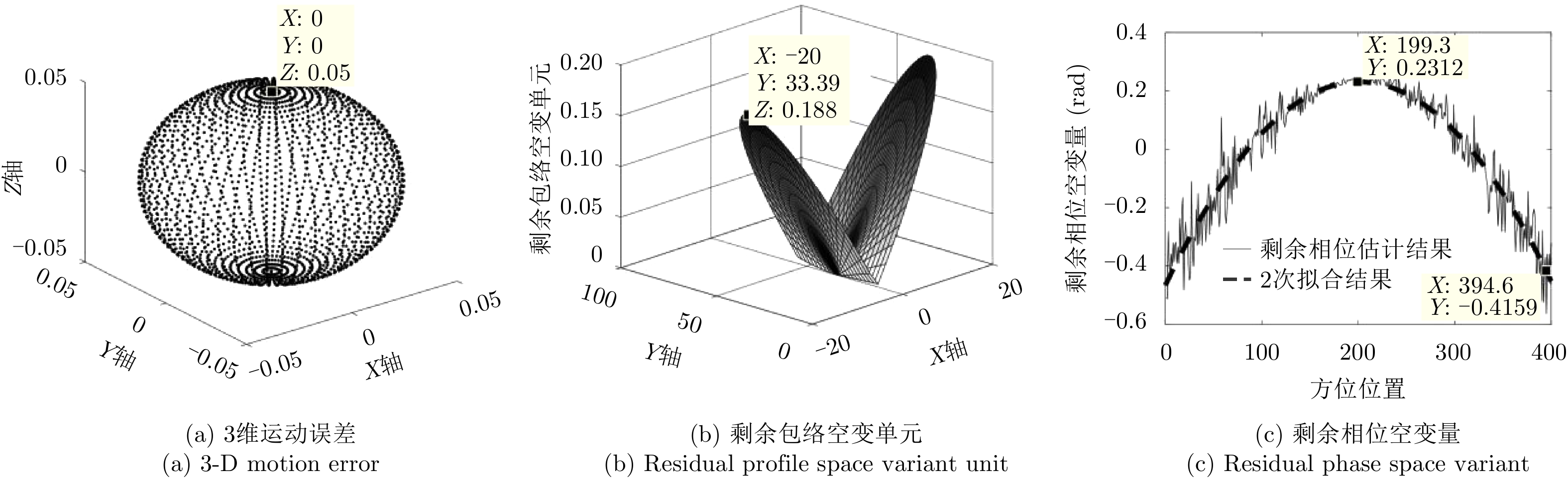
图 7 10 GHz车载微波光子雷达参数分析
Figure 7. 10 GHz microwave photonic-based SAR parameter analysis
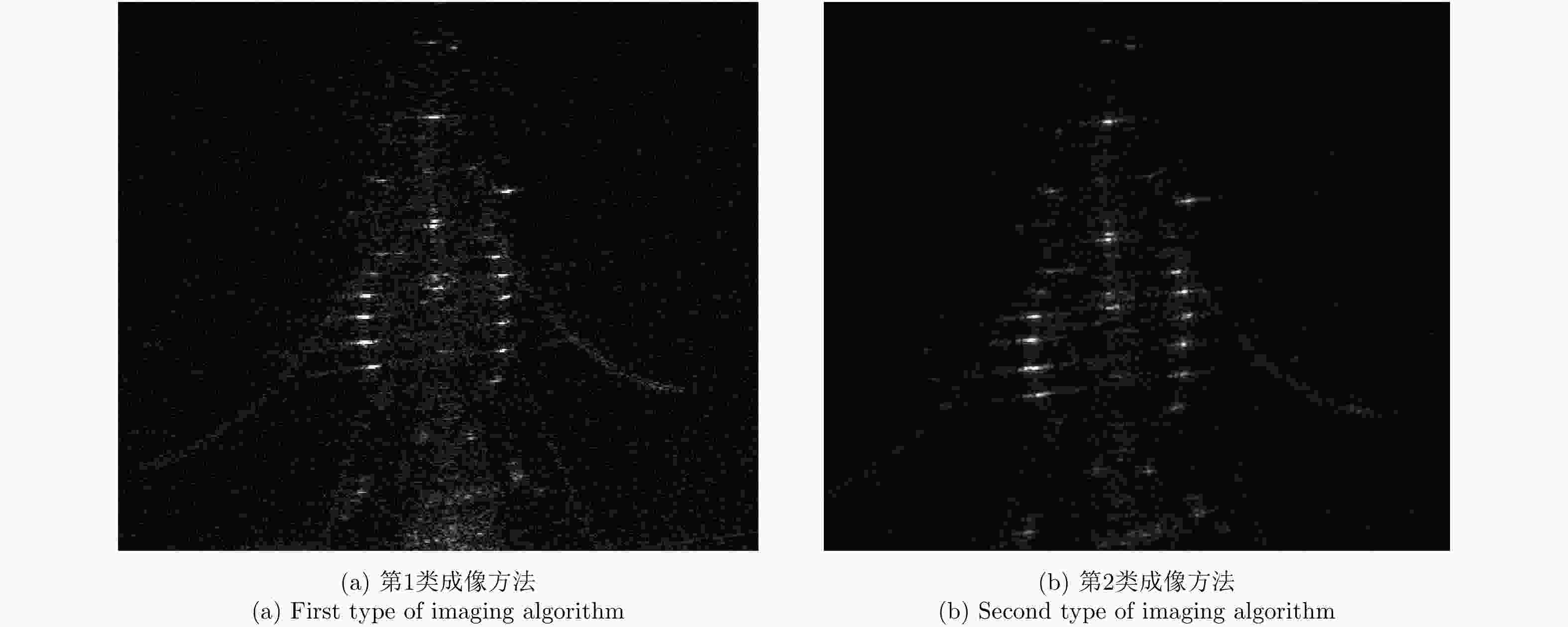
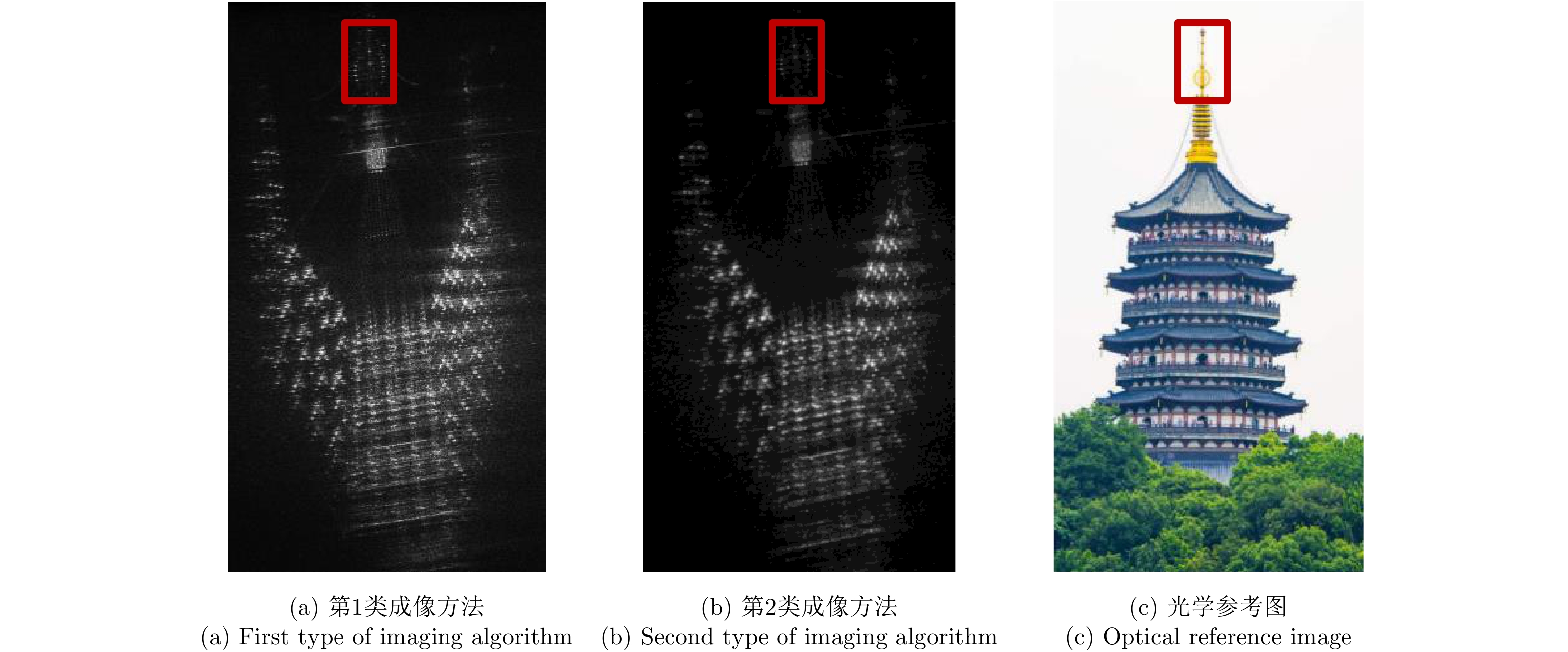
图 9 雷峰塔微波光子雷达成像结果局部方法图
Figure 9. Typical area of 10 GHz microwave photonic-based SAR imaging results
表 2 SAR成像参数
Table 2. SAR imaging parameters
参数 微波光子SAR 传统SAR 中心频率 35 GHz 9.6 GHz 带宽 10 GHz 500 MHz 采样频率 500 MHz 500 MHz 方位波束宽度 16° 3° 距离分辨率 1.5 cm 0.3 m 方位分辨率 1.5 cm 0.3 m 脉冲重复频率 8000 Hz 800 Hz  下载: 导出CSV
下载: 导出CSV
表 3 车载微波光子雷达系统参数
Table 3. SAR system parameters
参数 值 参数 值 中心频率 35 GHz 飞行速度 10 km/h 带宽 10 GHz 俯仰角 13° 采样频率 500 MHz 距离分辨率 1.5 cm 脉冲重复频率 666 Hz 方位波束宽度 13° 中心斜距 150 m 方位分辨率 1.5 cm
下载: 导出CSV
-
[1] FORNARO G. Trajectory deviations in airborne SAR: Analysis and compensation[J]. IEEE Transactions on Aerospace and Electronic Systems, 1999, 35(3): 997–1009. doi: 10.1109/7.784069 [2] MAO Xinhua, ZHU Daiyin, and ZHU Zhaoda. Polar format algorithm wavefront curvature compensation under arbitrary radar flight path[J]. IEEE Geoscience and Remote Sensing Letters, 2012, 9(3): 526–530. doi: 10.1109/LGRS.2011.2173291 [3] YANG Lei, XING Mengdao, WANG Yong, et al. Compensation for the NsRCM and phase error after polar format resampling for airborne spotlight SAR raw data of high resolution[J]. IEEE Geoscience and Remote Sensing Letters, 2013, 10(1): 165–169. doi: 10.1109/LGRS.2012.2196676 [4] LI Ruoming, LI Wangzhe, DING Manlai, et al. Demonstration of a microwave photonic synthetic aperture radar based on photonic-assisted signal generation and stretch processing[J]. Optics Express, 2017, 25(13): 14334–14340. doi: 10.1364/OE.25.014334 [5] LAGHEZZA F, SCOTTI F, ONORI D, et al. ISAR imaging of non-cooperative targets via dual band photonics-based radar system[C]. Proceedings of the 17th International Radar Symposium, Krakow, Poland, 2016: 1–4. doi: 10.1109/IRS.2016.7497319. [6] WO Jianghai, WANG Anle, ZHANG Jin, et al. Wideband tunable microwave generation using a dispersion compensated optoelectronic oscillator[C]. Proceedings of 2017 Opto-Electronics and Communications Conference (OECC) and Photonics Global Conference (PGC), Singapore, Singapore, 2017: 1–2. doi: 10.1109/OECC.2017.8114928. [7] LI Yake, LIU Chang, WANG Yanfei, et al. A robust motion error estimation method based on raw data[J]. IEEE Transactions on Geoscience and Remote Sensing, 2012, 50(7): 2780–2790. doi: 10.1109/TGRS.2011.2175737 [8] 邢孟道, 保铮. 基于运动参数估计的SAR成像[J]. 电子学报, 2001, 29(12A): 1824–1828. doi: 10.3321/j.issn:0372-2112.2001.z1.023XING Mengdao and BAO Zheng. Motion parameter estimation based SAR imaging[J]. Acta Electronica Sinica, 2001, 29(12A): 1824–1828. doi: 10.3321/j.issn:0372-2112.2001.z1.023 [9] EICHEL P H and JAKOWATZ C V. Phase-gradient algorithm as an optimal estimator of the phase derivative[J]. Optics Letters, 1989, 14(20): 1101–1103. doi: 10.1364/OL.14.001101 [10] XU Gang, XING Mengdao, ZHANG Lei, et al. Robust autofocusing approach for highly squinted SAR imagery using the extended wavenumber algorithm[J]. IEEE Transactions on Geoscience and Remote Sensing, 2013, 51(10): 5031–5046. doi: 10.1109/tgrs.2013.2276112 [11] ZHU Daiyin, JIANG Rui, MAO Xinhua, et al. Multi-subaperture PGA for SAR autofocusing[J]. IEEE Transactions on Aerospace and Electronic Systems, 2013, 49(1): 468–488. doi: 10.1109/taes.2013.6404115 [12] CHEN Jianlai, XING Mengdao, SUN Guangcai, et al. A 2-D space-variant motion estimation and compensation method for ultrahigh-resolution airborne stepped-frequency SAR with long integration time[J]. IEEE Transactions on Geoscience and Remote Sensing, 2017, 55(11): 6390–6401. doi: 10.1109/tgrs.2017.2727060 [13] YANG Mingdong, ZHU Daiyin, and SONG Wei. Comparison of two-step and one-step motion compensation algorithms for airborne synthetic aperture radar[J]. Electronics Letters, 2015, 51(14): 1108–1110. doi: 10.1049/el.2015.1350 [14] ZHANG Lei, WANG Guanyong, QIAO Zhijun, et al. Azimuth motion compensation with improved subaperture algorithm for airborne SAR imaging[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2017, 10(1): 184–193. doi: 10.1109/JSTARS.2016.2577588 [15] CANTALLOUBE H. SAR retrieval of a ship vertical profile from her roll and pitch motion[C]. Proceedings of the 10th European Conference on Synthetic Aperture Radar, Berlin, Germany, 2014: 1–4. [16] HÖGBOM J A. Aperture synthesis with a non-regular distribution of interferometer baselines[J]. Astronomy and Astrophysics Supplement, 1974, 15(3): 417–426. [17] 唐江文, 邓云凯, 王宇, 等. 高分辨率滑动聚束SAR BP成像及其异构并行实现[J]. 雷达学报, 2017, 6(4): 368–375. doi: 10.12000/JR16053TANG Jiangwen, DENG Yunkai, WANG Yu, et al. High-resolution slide spotlight SAR imaging by BP algorithm and heterogeneous parallel implementation[J]. Journal of Radars, 2017, 6(4): 368–375. doi: 10.12000/JR16053 [18] WEHNER D R. High Resolution Radar[M]. Norwood, MA: Artech House, 1987. [19] ULANDER L M H, HELLSTEN H, and STENSTROM G. Synthetic-aperture radar processing using fast factorized back-projection[J]. IEEE Transactions on Aerospace and Electronic Systems, 2003, 39(3): 760–776. doi: 10.1109/TAES.2003.1238734 -




图(9) / 表(3)
计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

