
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
Research Progress on Three-dimensional SAR Imaging Techniques
-
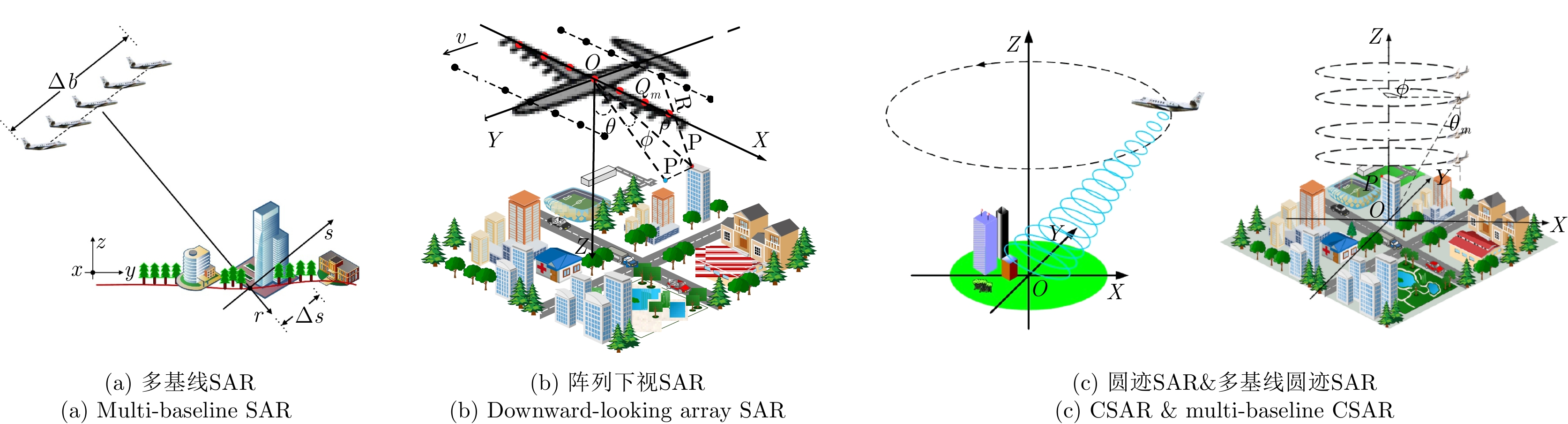
摘要: 常规SAR成像,平台沿直线飞行,形成直线型合成孔径,仅能获取2维图像,即3维空间中的观测场景在斜距-方位平面的2维投影,图像具有叠掩、透视缩短、阴影等畸变现象。SAR 3维成像突破了斜距-方位2维频率信息获取,能够获取第3维频率信息,实现3维分辨,可获得观测场景的散射中心在3维空间中的分布,从而解决叠掩问题,消除透视缩短、顶底倒置等几何形变现象,更直观地描述客观场景,已成为国际研究热点。该文介绍SAR 3维成像的概念和主要观测模式,分析该领域国内外研究现状和进展,重点阐述作者所在研究团队的SAR 3维成像研究进展,最后对SAR 3维成像技术进行总结和展望。Abstract: Conventional Synthetic Aperture Radar (SAR) moves along a straight line and forms a linear synthetic apertures. It can only obtain the two-dimensional (2-D) image of illuminated scene that is the projection of the three-dimensional (3-D) real scene onto a slant plane. The slant plane 2-D SAR image, however, suffers from layover and foreshortening effects. 3-D SAR imaging enables 3-D resolving capability by extending the acquisition of frequency information from 2-D to 3-D. It can obtain the 3-D distribution of scattering centers; therefore, it solves the geometric deformation problems of layover and foreshortening. 3-D SAR imaging has become a trending topic in research on SAR techniques worldwide. In this paper, we first introduced the concept of 3-D SAR imaging and several typical 3-D SAR imaging modes. Furthermore, it provides a discussion on research progress at home and abroad, particularly focusing on the progress of our research team. Finally, future research prospects are presented.
-
Key words:
- 3-D SAR imaging /
- Multi-baseline SAR /
- Array 3-D SAR /
- Curvilinear SAR /
- Circular SAR /
- Multi-baseline Circular SAR
-
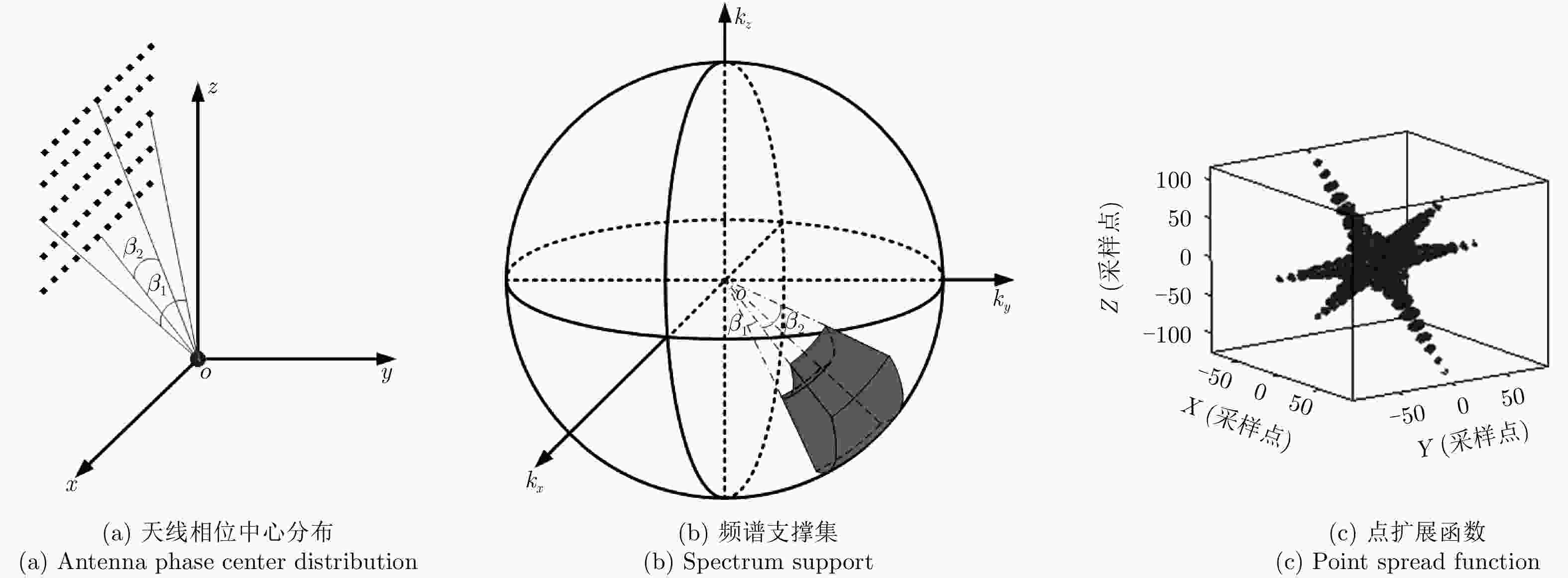
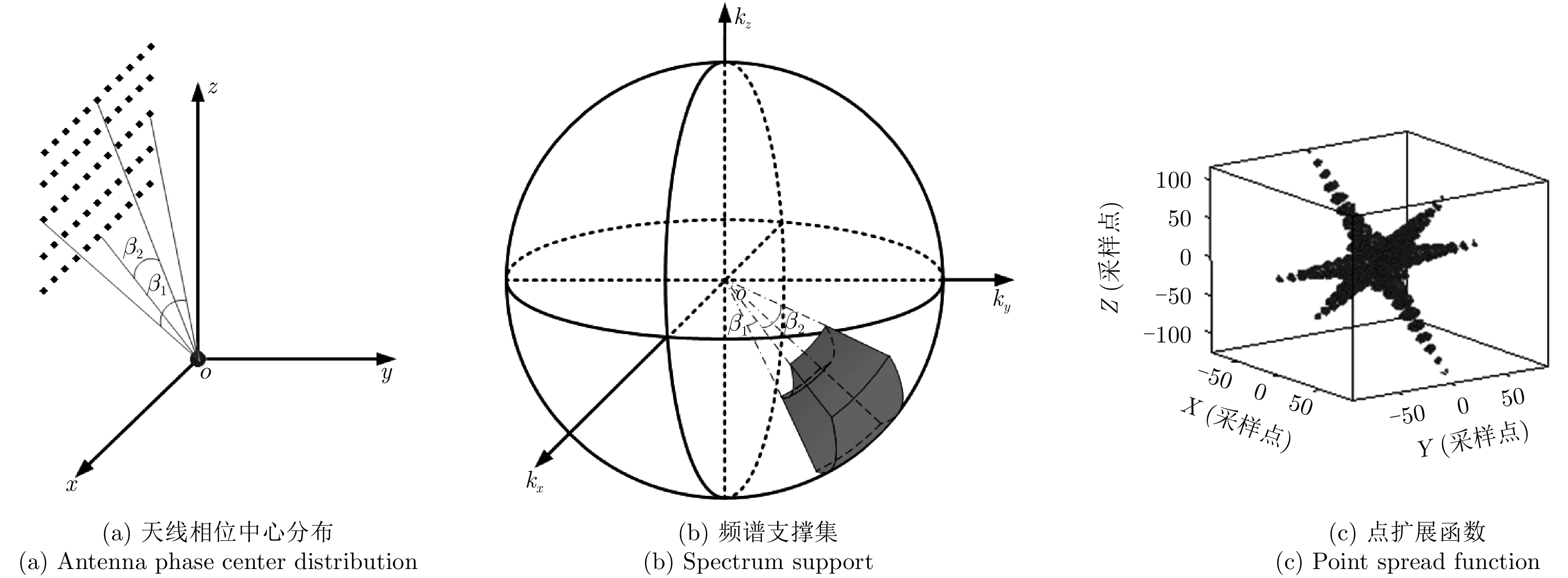
图 3 多基线SAR的数据采集天线相位中心分布、频谱支撑集和点扩展函数
Figure 3. The antenna phase center distribution, spectrum support and point spread function of multi-baseline SAR
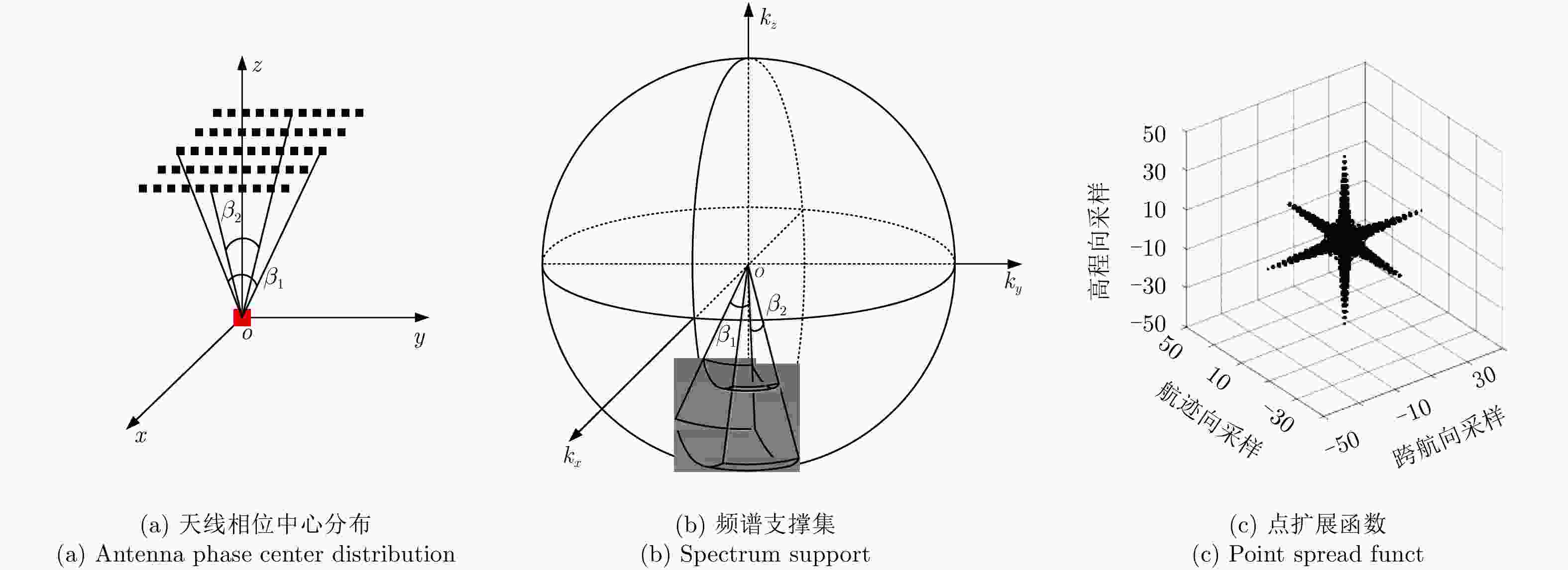
图 4 阵列下视SAR的数据采集天线相位中心分布、频谱支撑集和点扩展函数
Figure 4. The antenna phase center distribution, spectrum support and point spread function of downward-looking array SAR
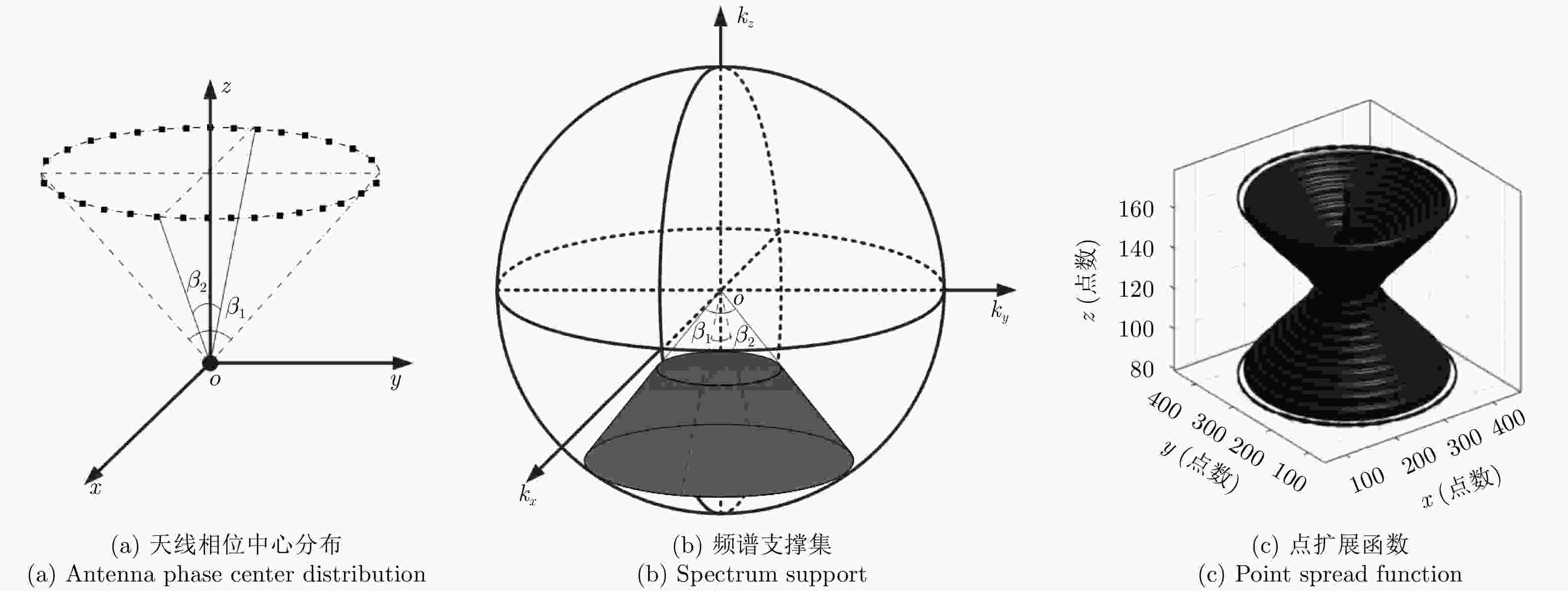
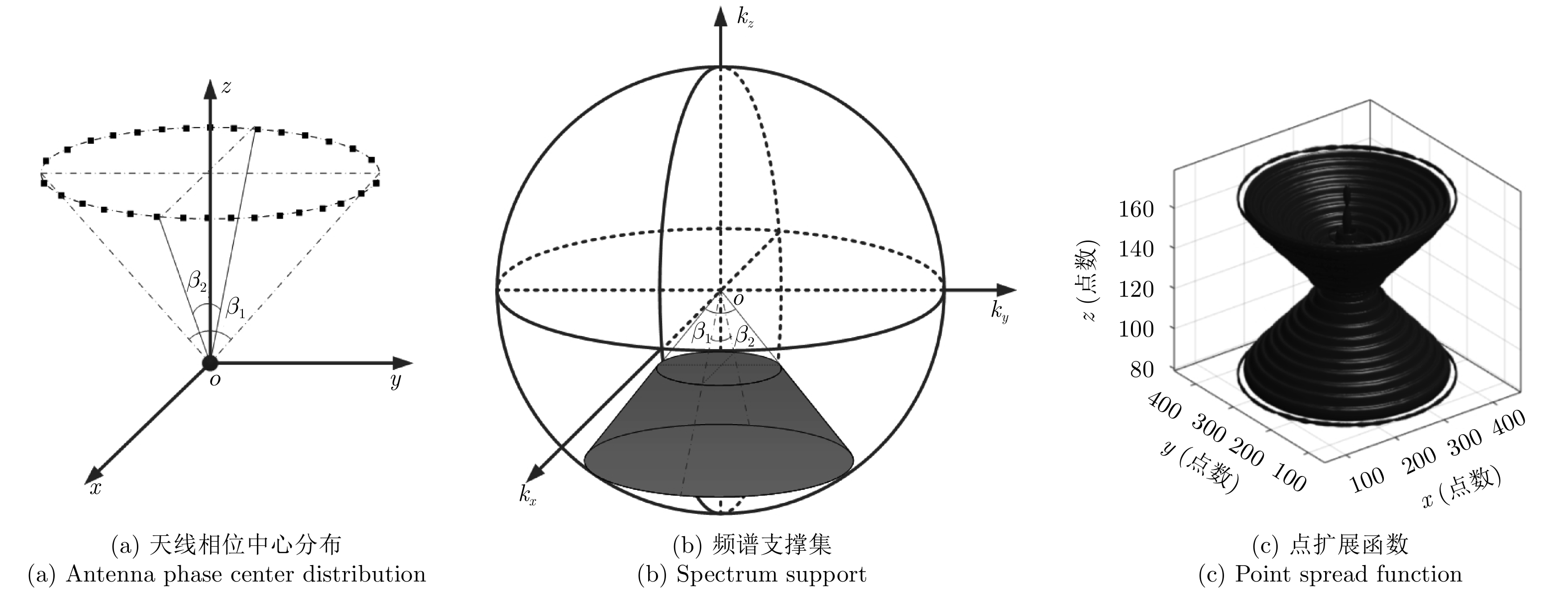
图 5 圆迹SAR的数据采集天线相位中心分布、频谱支撑集和点扩展函数
Figure 5. The antenna phase center distribution, spectrum support and point spread function of circular SAR

图 6 多基线圆迹SAR的数据采集天线相位中心分布、频谱支撑集和点扩展函数
Figure 6. The antenna phase center distribution, spectrum support and point spread function of multi-baseline circular SAR

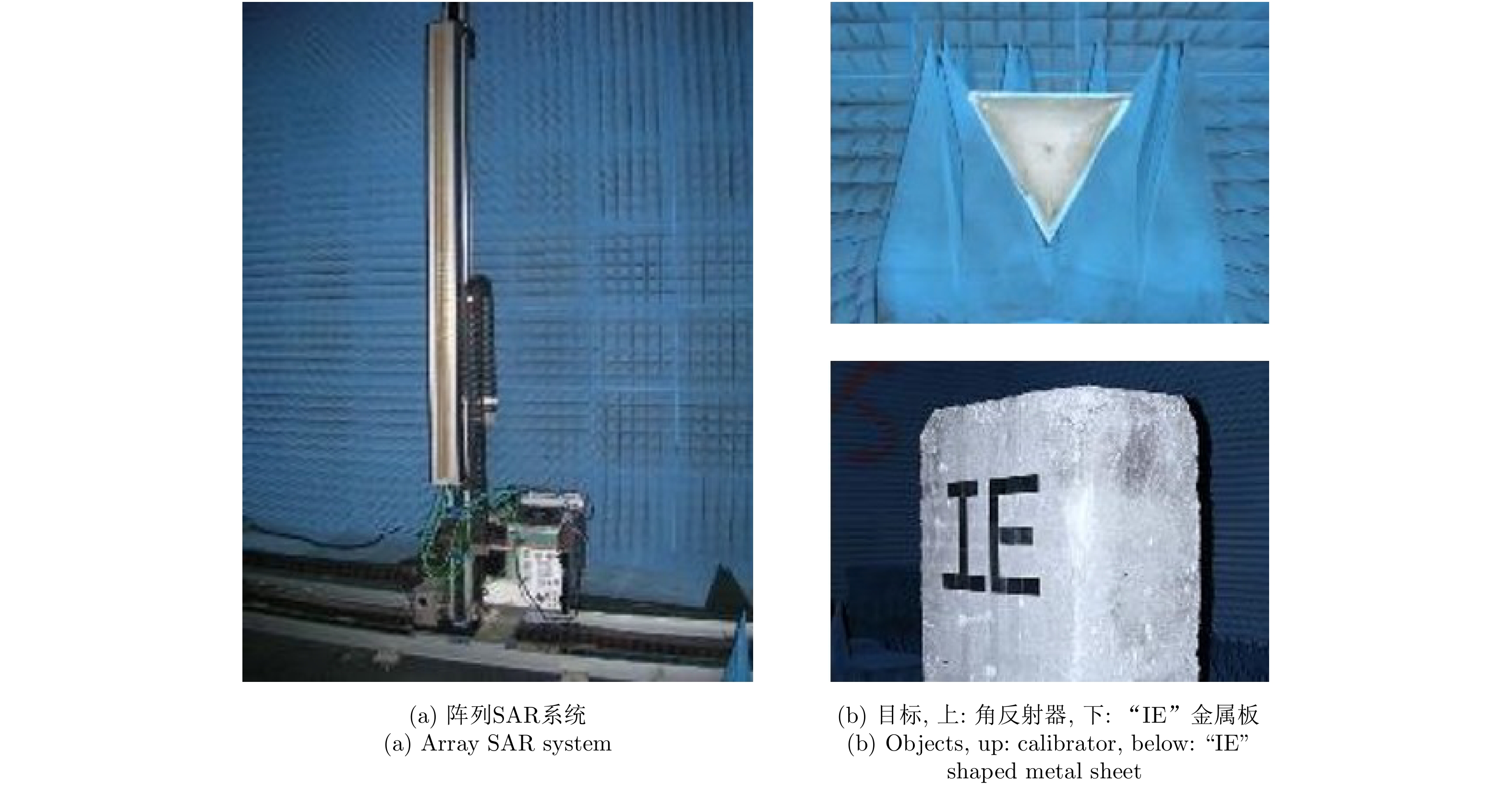
图 7 暗室多基线SAR观测的目标场景
Figure 7. The object of the multi-baseline SAR experiment in the chamber

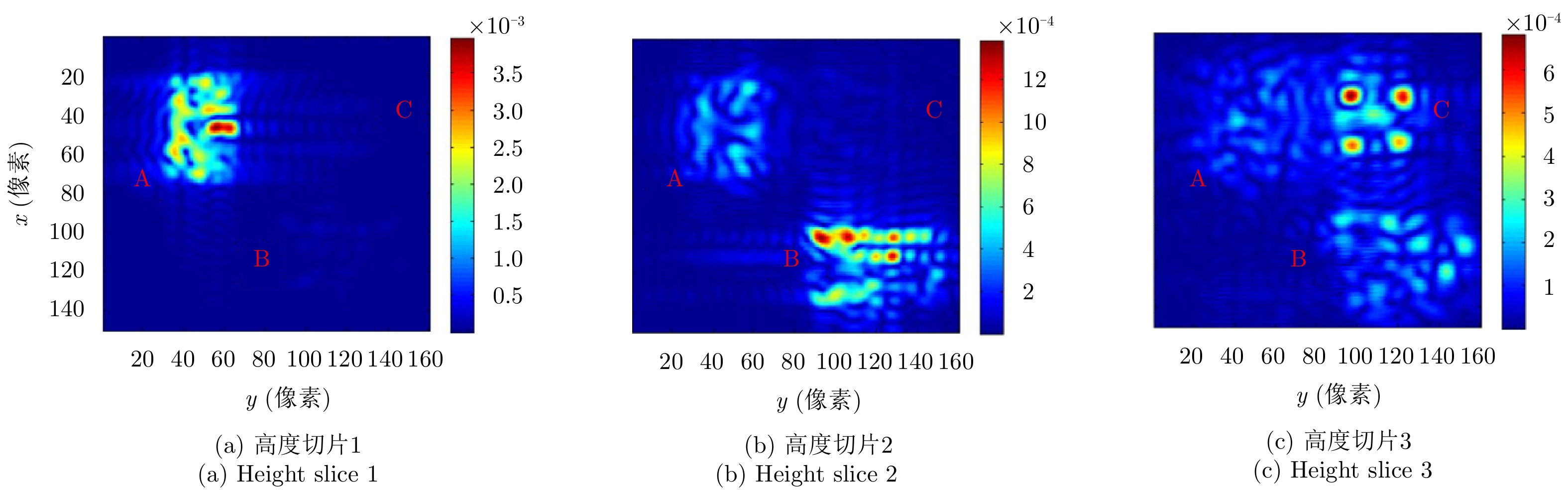
图 8 暗室多基线3维SAR成像结果
Figure 8. 3-D imaging results of the multi-baseline SAR experiment carried out in the chamber
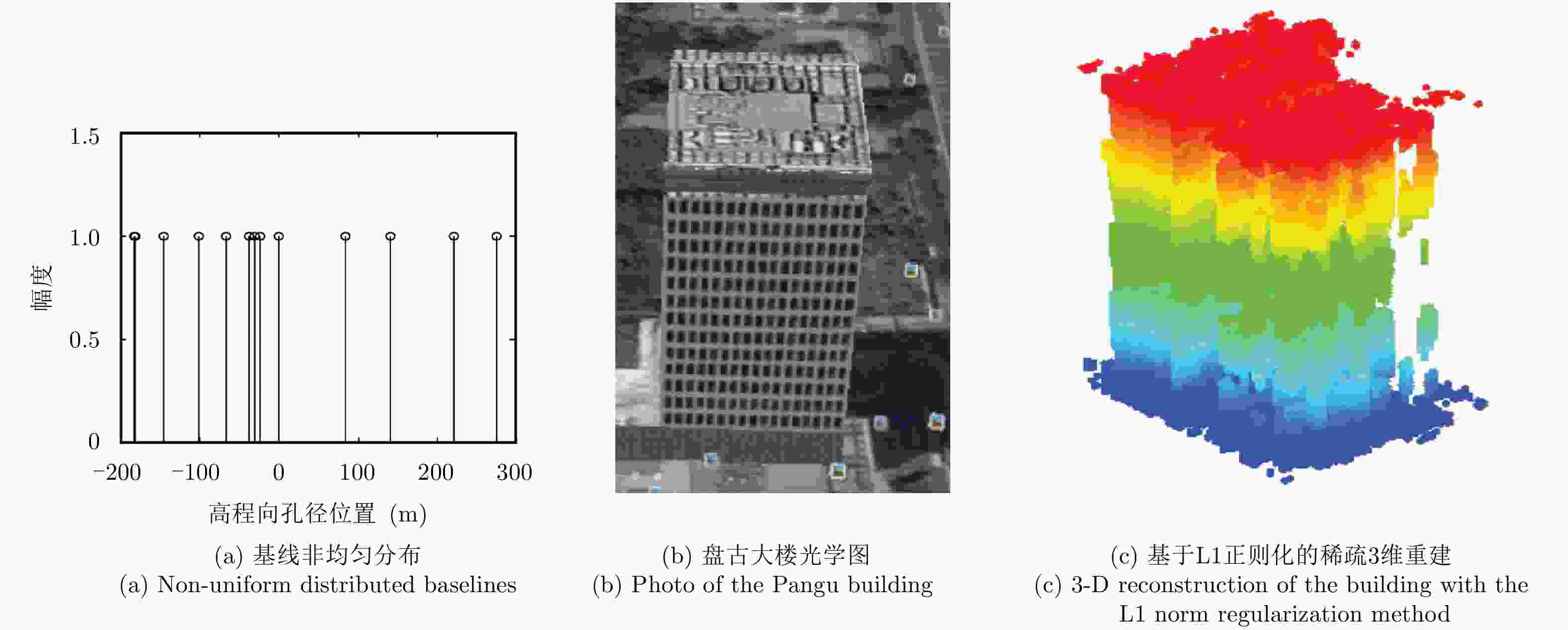
图 9 利用TerraSAR数据的多基线SAR 3维重建结果
Figure 9. 3-D reconstruction of the Pangu building using the TerraSAR-X multi-baseline data
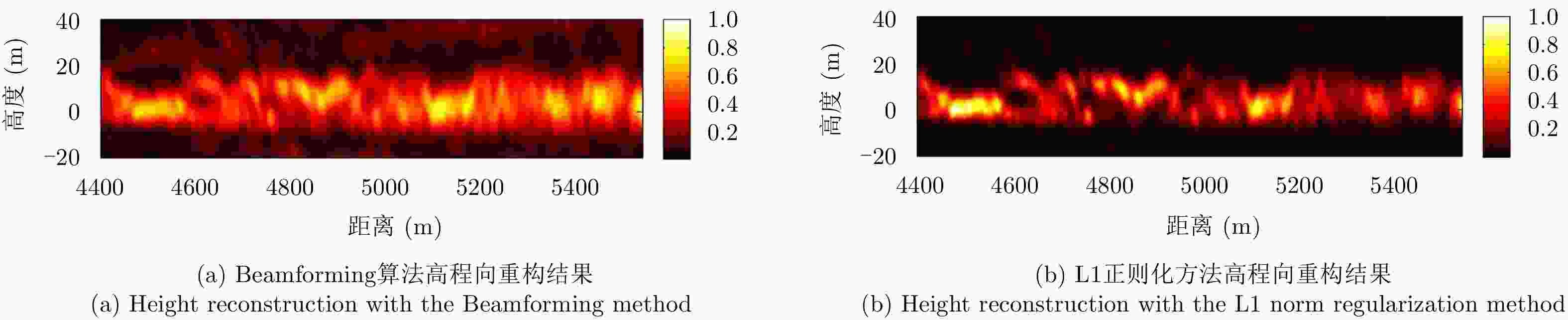
图 10 BioSAR森林地区多基线SAR 3维重构结果
Figure 10. 3-D reconstruction of a forest area using the BioSAR multi-baseline data
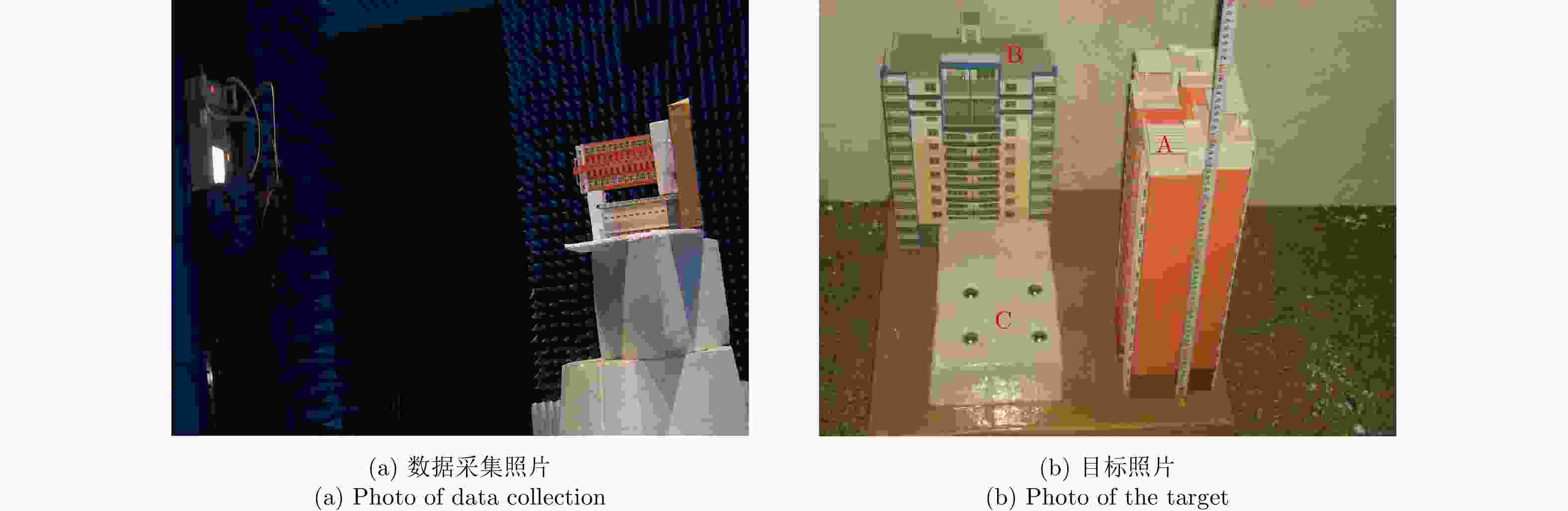
图 11 模拟下视3-D SAR的成像几何及建筑物模型
Figure 11. Geometry of the downward-looking SAR experiment and the building model
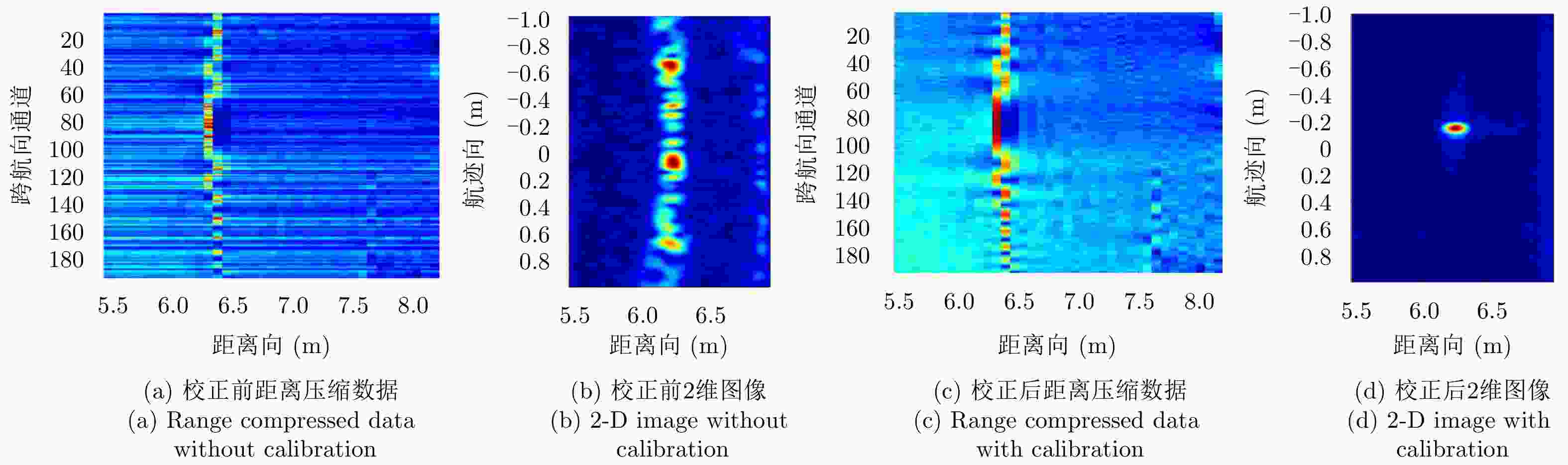
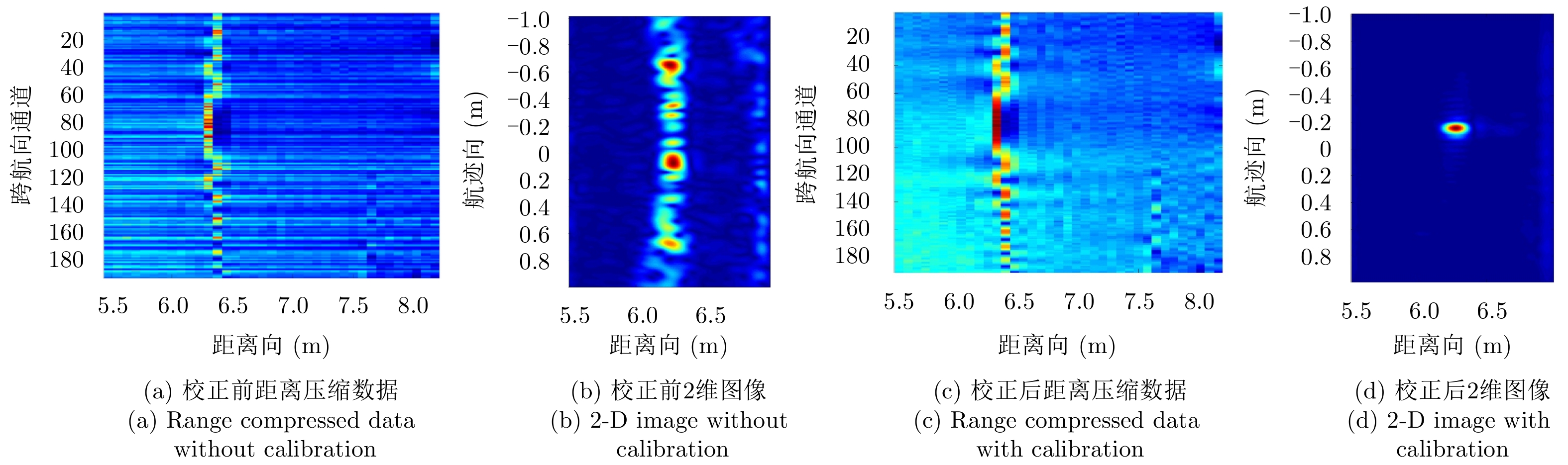
图 14 通道一致性校正前后角反射器数据处理结果对比
Figure 14. Imaging results of the corner reflector with and without the multi-channel calibration
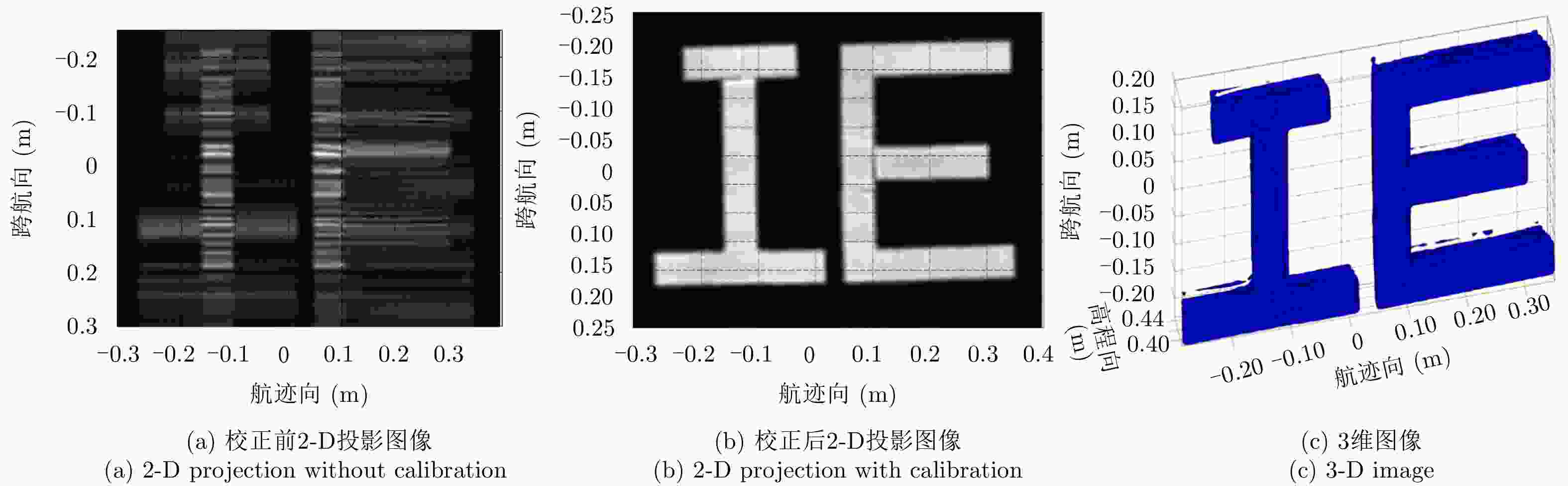
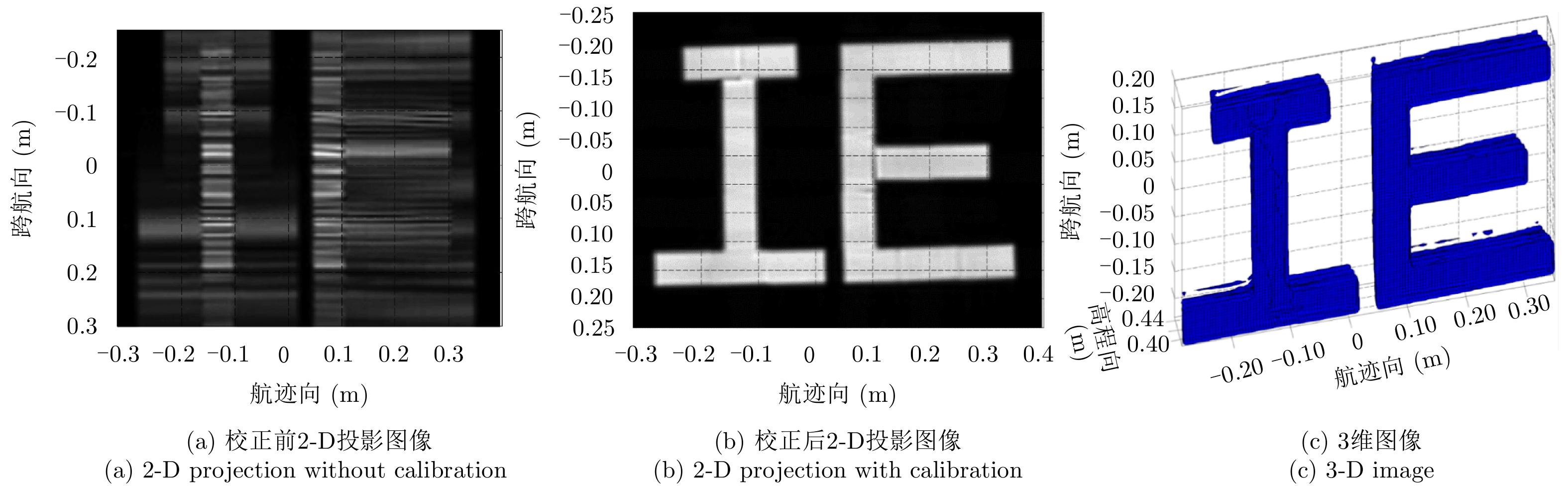
图 15 字母IE数据的通道一致性校正前后成像结果对比
Figure 15. Imaging results of the IE metal sheet with and without the multi-channel calibration
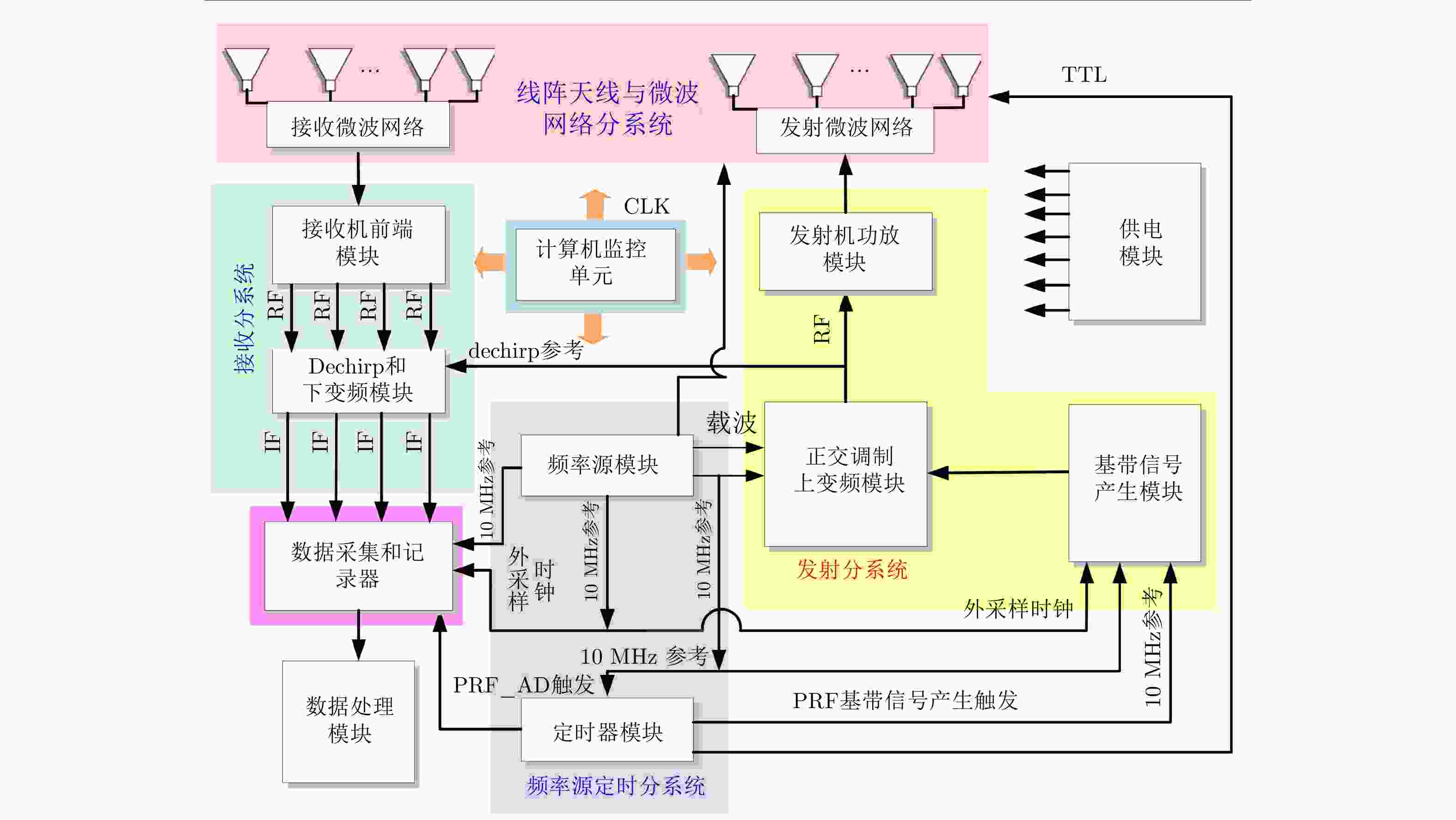
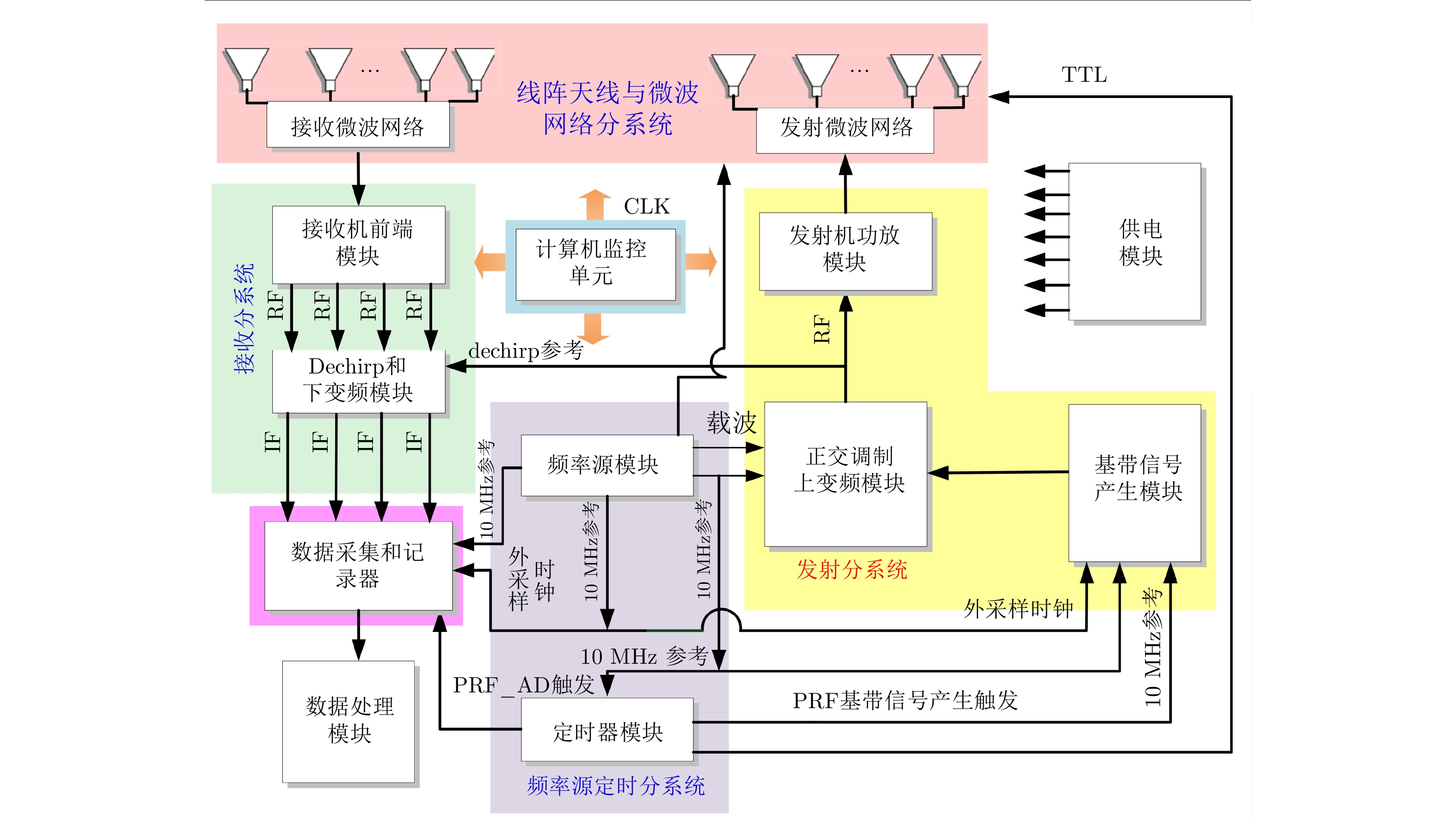
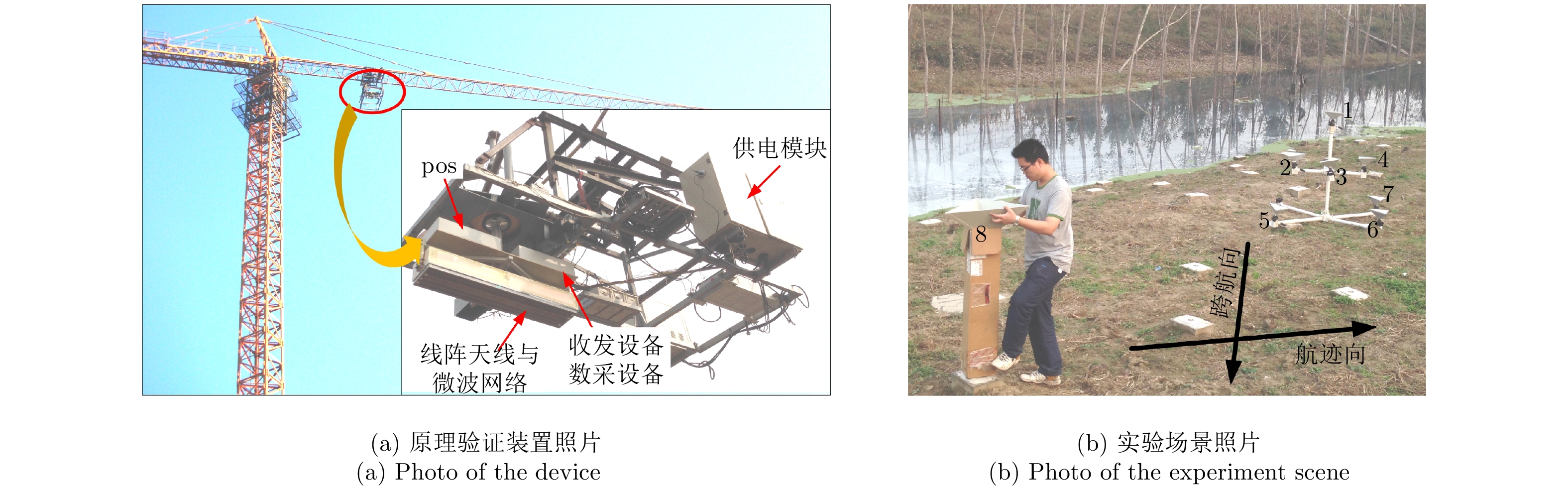
图 16 塔吊下视阵列原理验证系统组成框图
Figure 16. System block diagram of the tower crane downward-looking array SAR system
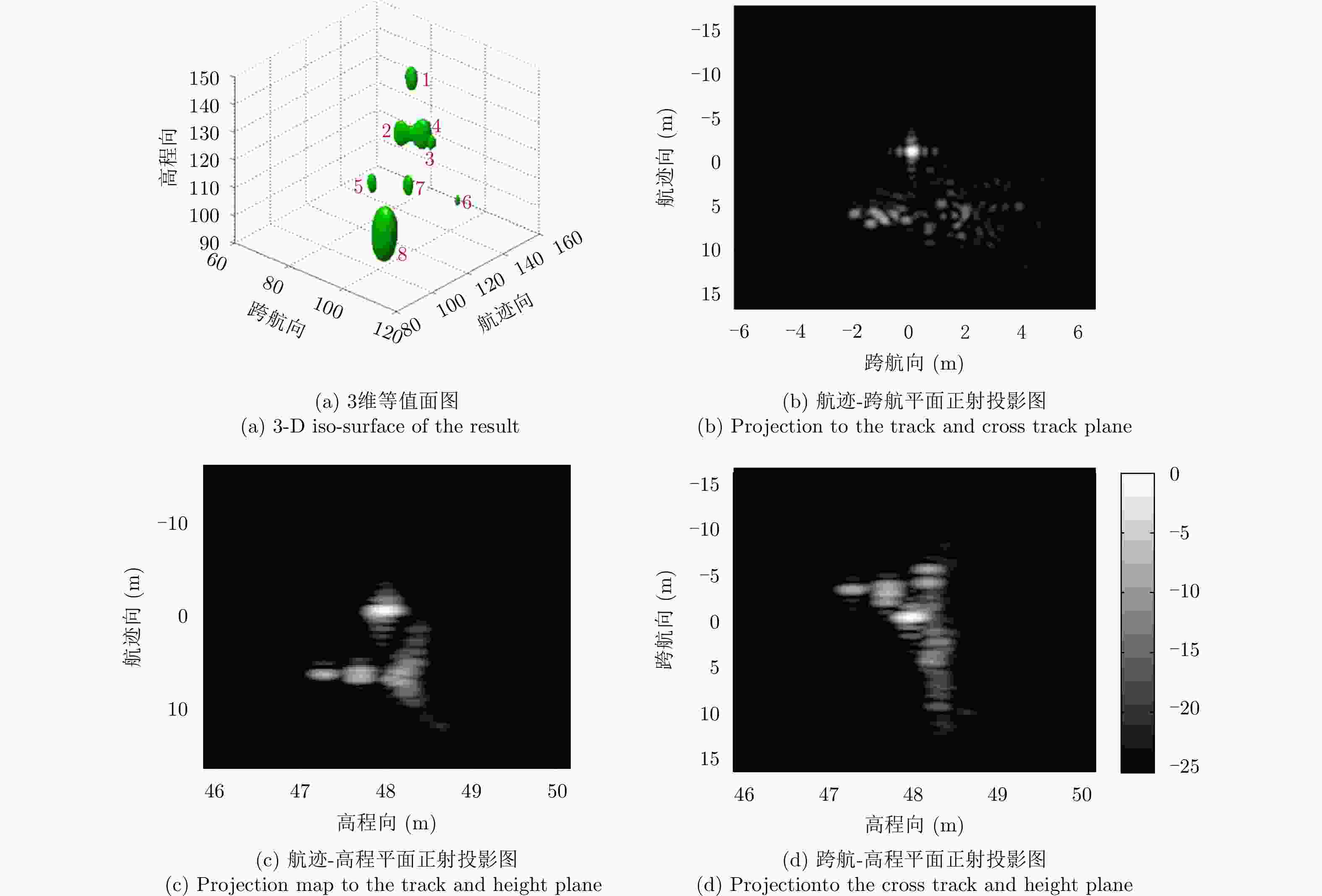
图 19 塔吊阵列SAR下视实验3维成像结果
Figure 19. 3-D imaging results of the tower crane downward-looking array SAR experiment
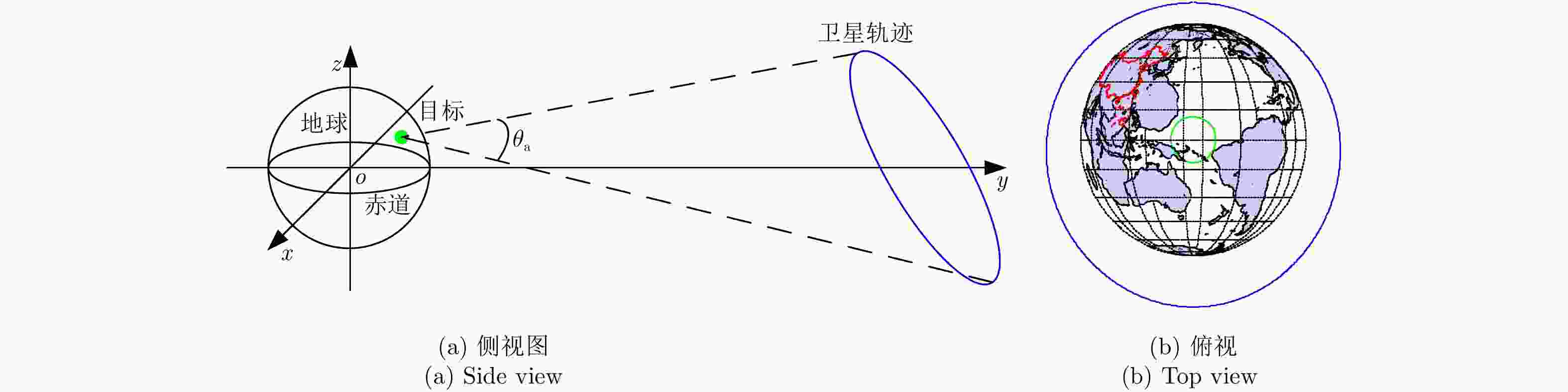
图 21 地心惯性直角坐标系下地球同步轨道圆迹SAR观测几何
Figure 21. Geo-CSAR geometry in the geocentric inertial cartesian coordinate
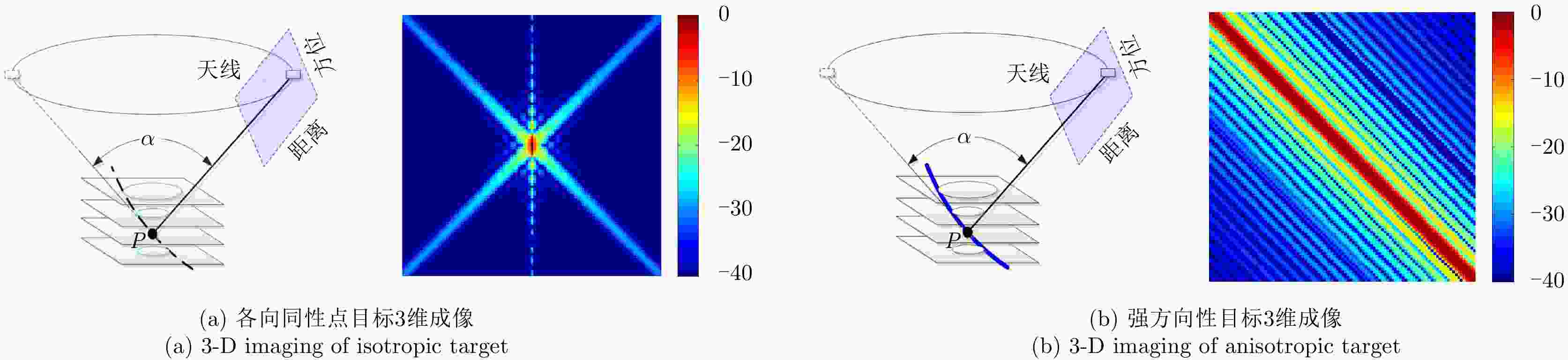
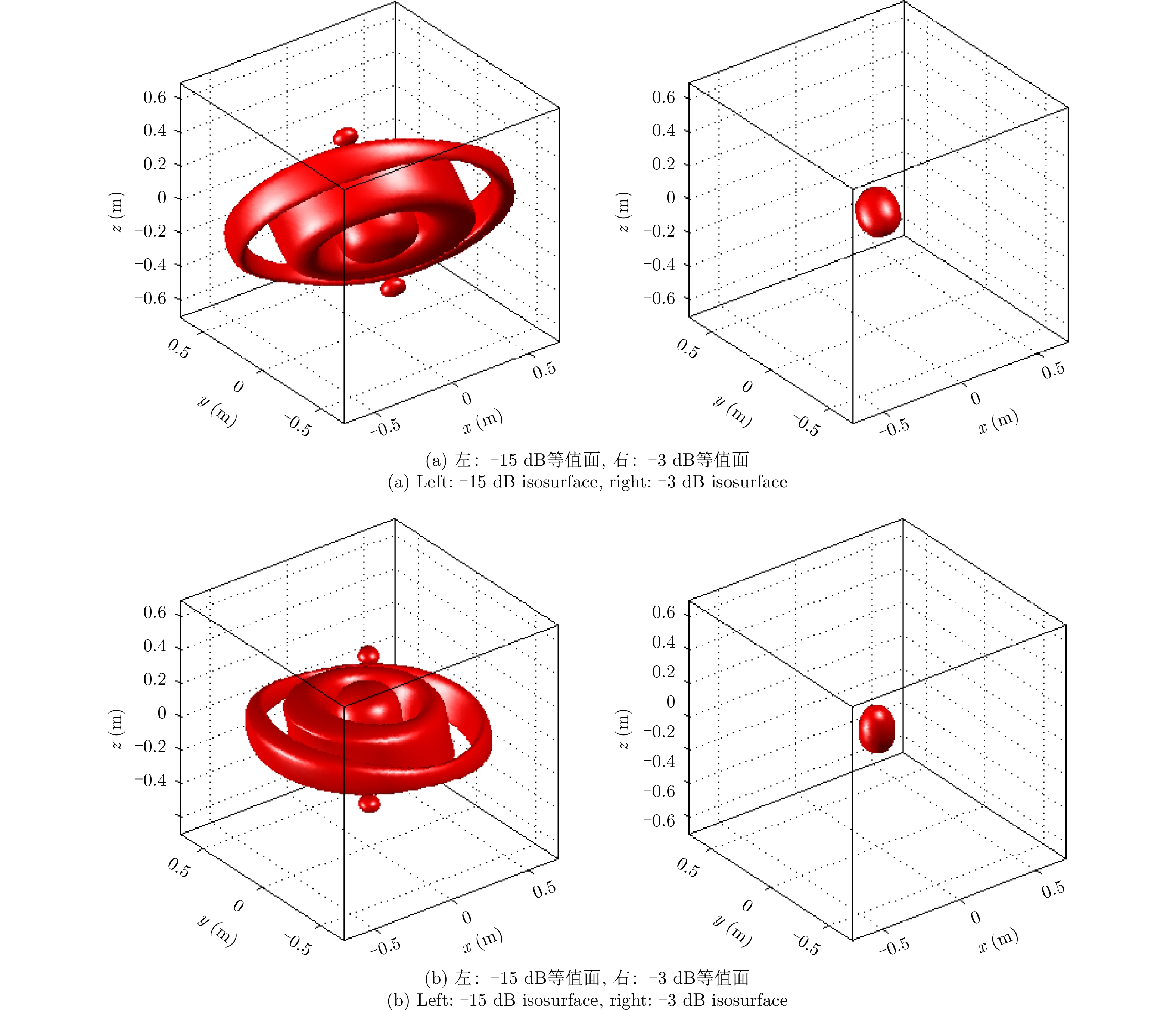
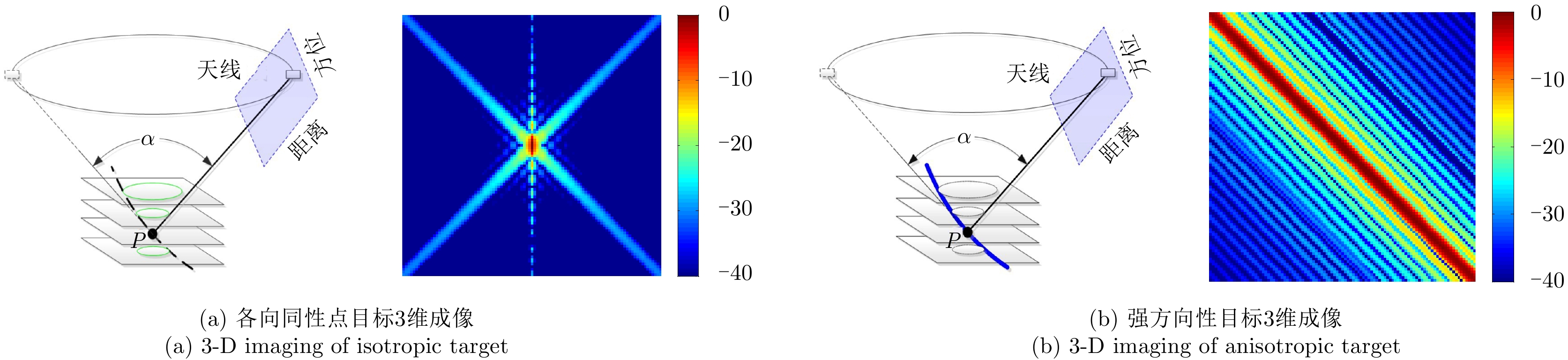
图 24 散射各向异性对圆迹SAR 3维分辨能力的影响
Figure 24. The effect of anisotropic property to the 3-D resolving capability of circular SAR

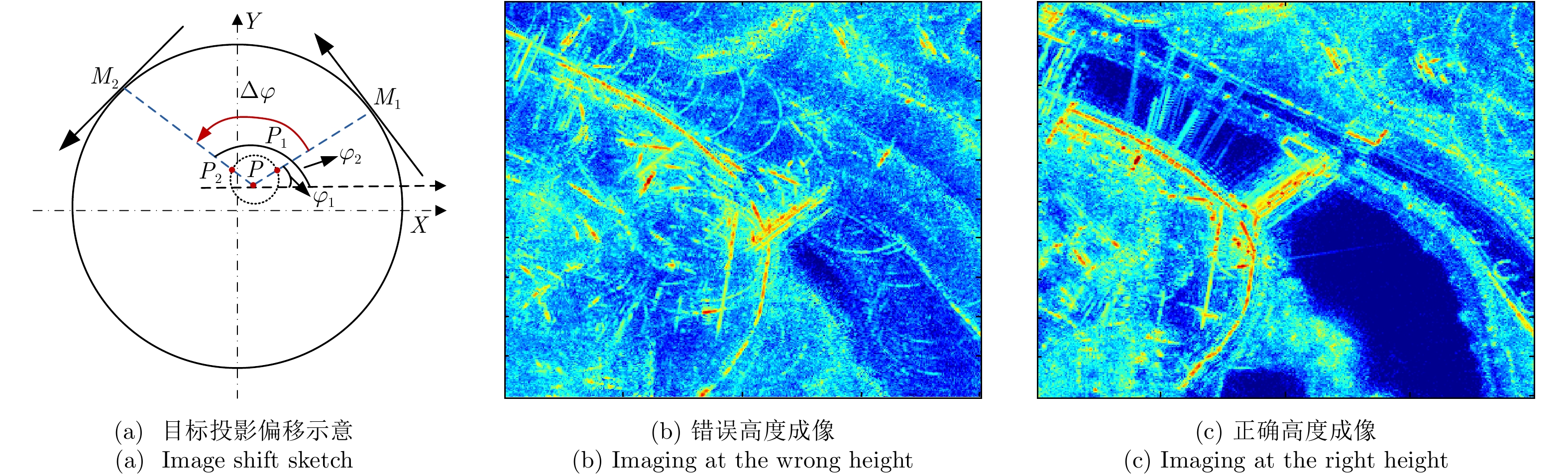
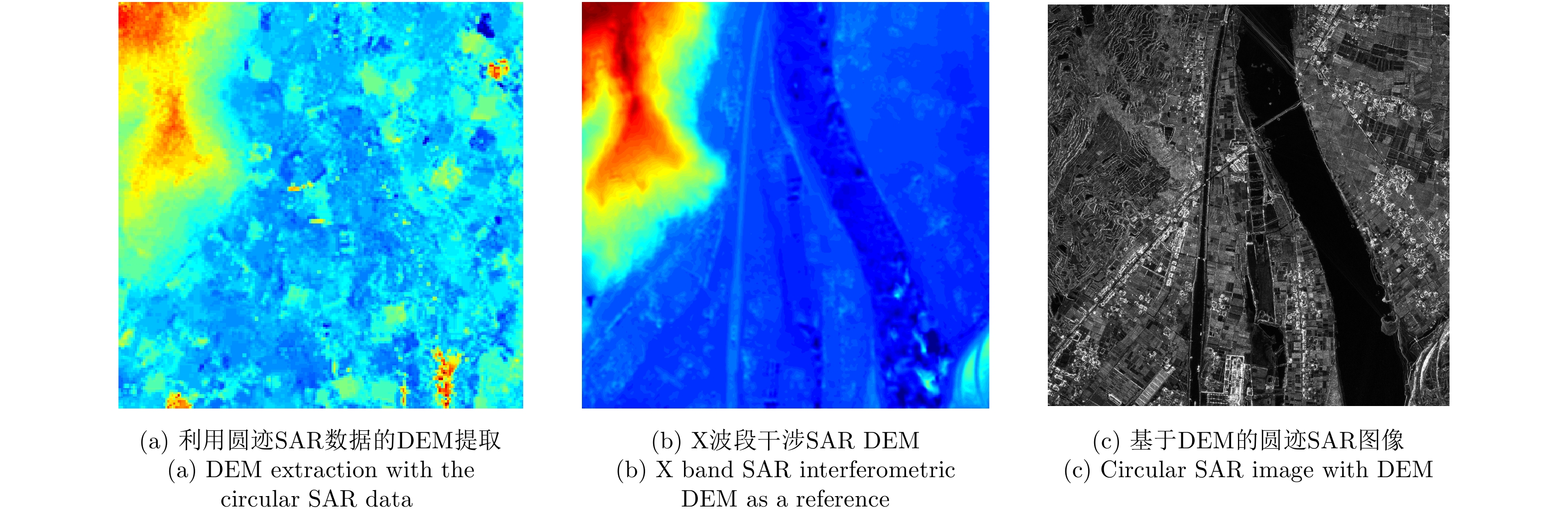
图 26 利用多角度图像的高程提取与利用高度信息的圆迹SAR成像
Figure 26. DEM extraction with circular SAR data and circular SAR imaging with DEM
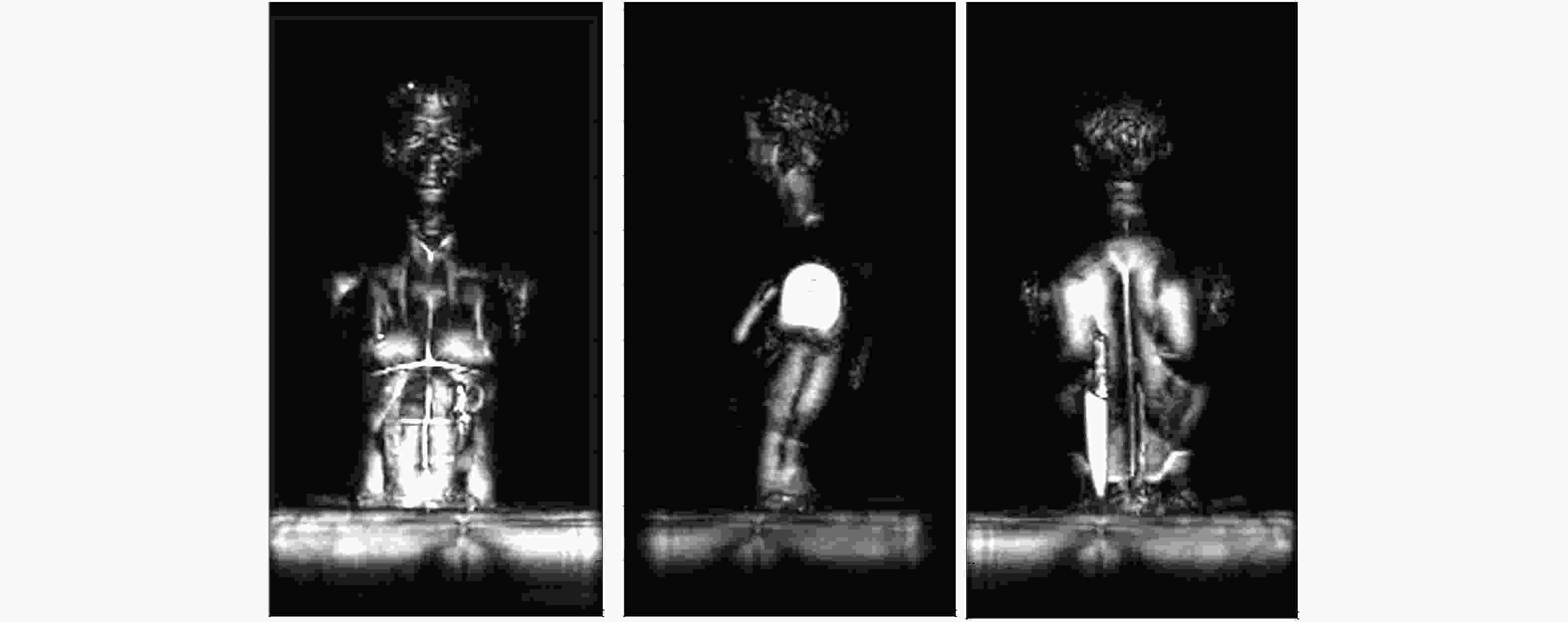
图 30 人体模型3维成像结果
Figure 30. 3-D imaging result of a mannequin with the cylindrical scanning array radar system
表 1 不同阵列稀疏优化布局方案对比
Table 1. Comparation of different sparse array scheme
阵列布局方式 相位中心与稀疏阵列长度比 阵列稀疏率 安装要求 阵列方向图 两侧发射中间接收收
发分置$\frac{{2MN - 1}}{{2M\left( {N + 1} \right) - 2}}$ $1 - \frac{{2M + N}}{{2MN}}$ 阵元相对安装位置
要求严格无模糊成像范围内
低旁瓣两侧接收中间发射收
发分置$\frac{{\left( {MN - 1} \right)}}{{2M\left( {N - 1} \right)}}$ $1 - \frac{{M + N}}{{MN}}$ 阵元相对安装位置
要求严格无模糊成像范围内
低旁瓣等效相位中心均匀收
发共用1 极限接近90% 阵元相对安装位置
要求严格无模糊成像范围内
低旁瓣等效相位中心近似均匀收
发分置因平台差异 因平台差异 阵元相对安装位置
要求不严格无模糊成像范围内旁瓣
相对较低 下载: 导出CSV
下载: 导出CSV
-
[1] Knaell K. Three-dimensional SAR from curvilinear apertures[C]. Proceedings of SPIE 2230, Algorithms for Synthetic Aperture Radar Imagery, Orlando, FL, USA, 1994. [2] Soumekh M. Reconnaissance with slant plane circular SAR imaging[J]. IEEE Transactions on Image Processing, 1996, 5(8): 1252–1265. DOI: 10.1109/83.506760 [3] Bryant M L, Gostin L L, and Soumekh M. 3-D E-CSAR imaging of a T-72 tank and synthesis of its SAR reconstructions[J]. IEEE Transactions on Aerospace and Electronic Systems, 2003, 39(1): 211–227. DOI: 10.1109/TAES.2003.1188905 [4] Fortuny J. Efficient algorithms for three-dimensional near-field synthetic aperture radar imaging[D].[Ph.D. dissertation], University of Karslruhe, 2001. [5] Fortuny J and Lopez-Sanchez J M. Extension of the 3-D range migration algorithm to cylindrical and spherical scanning geometries[J]. IEEE Transactions on Antennas and Propagation, 2001, 49(10): 1434–1444. DOI: 10.1109/8.954932 [6] Reigber A and Moreira A. First demonstration of airborne SAR tomography using multibaseline L-band data[J]. IEEE Transactions on Geoscience and Remote Sensing, 2000, 38(5): 2142–2152. DOI: 10.1109/36.868873 [7] 谭维贤. 合成孔径雷达三维成像理论与方法研究[D]. [博士论文], 中国科学院电子学研究所, 2009.Tan Wei-xian. Study on theory and algorithms for three-dimensional synthetic aperture radar imaging[D]. [Ph.D. dissertation], Institute of Electronics, Chinese Academy of Sciences, 2009. [8] 洪文, 丁赤飚, 王彦平, 等. 确定微波三维成像中相位中心时空分布的方法[P]. 中国, CN201310699025, 2014.Hong Wen, Ding Chi-biao, Wang Yan-ping, et al.. Method for confirming space-time distribution of phase center in microwave three-dimensional imaging[P]. CN, CN201310699025, 2014. [9] Chan T K, Kuga Y, and Ishimaru A. Experimental studies on circular SAR imaging in clutter using angular correlation function technique[J]. IEEE Transactions on Geoscience and Remote Sensing, 1999, 37(5): 2192–2197. DOI: 10.1109/36.789616 [10] She Z, Gray D A, Bogner R E, et al.. Three-dimensional SAR imaging via multiple pass processing[C]. Proceedings of IEEE 1999 International Geoscience and Remote Sensing Symposium, Hamburg, Germany, 1999, 5: 2389–2391. DOI: 10.1109/IGARSS.1999.771519. [11] Fornaro G, Serafino F, and Soldovieri F. Three-dimensional focusing with multipass SAR data[J]. IEEE Transactions on Geoscience and Remote Sensing, 2003, 41(3): 507–517. DOI: 10.1109/TGRS.2003.809934 [12] Fornaro G and Serafino F. Imaging of single and double scatterers in urban areas via SAR tomography[J]. IEEE Transactions on Geoscience and Remote Sensing, 2006, 44(12): 3497–3505. DOI: 10.1109/TGRS.2006.881748 [13] Zhu X X and Bamler R. Super-resolution power and robustness of compressive sensing for spectral estimation with application to spaceborne tomographic SAR[J]. IEEE Transactions on Geoscience and Remote Sensing, 2012, 50(1): 247–258. DOI: 10.1109/TGRS.2011.2160183 [14] Budillon A, Evangelista A, and Schirinzi G. Three-dimensional SAR focusing from multipass signals using compressive sampling[J]. IEEE Transactions on Geoscience and Remote Sensing, 2011, 49(1): 488–499. DOI: 10.1109/TGRS.2010.2054099 [15] Aguilera E, Nannini M, and Reigber A. Wavelet-based compressed sensing for SAR tomography of forested areas[J]. IEEE Transactions on Geoscience and Remote Sensing, 2013, 51(12): 5283–5295. DOI: 10.1109/TGRS.2012.2231081 [16] Aguilera E, Nannini M, and Reigber A. Multisignal compressed sensing for polarimetric SAR tomography[J]. IEEE Geoscience and Remote Sensing Letters, 2012, 9(5): 871–875. DOI: 10.1109/LGRS.2012.2185482 [17] Gierull C H. On a concept for an airborne downward-looking imaging radar[J]. International Journal of Electronics and Communications, 1999, 53(6): 295–304. [18] Giret R, Jeuland H, and Enert P. A study of a 3D-SAR concept for a millimeter wave imaging radar onboard an UAV[C]. Proceedings of the 1st European Radar Conference, Amsterdam, The Netherlands, 2004: 201–204. [19] Nouvel J, Jeuland H, Bonin G, et al.. A Ka band imaging radar: DRIVE on board ONERA motorglider[C]. Proceedings of 2006 IEEE International Symposium on Geoscience and Remote Sensing, Denver, USA, 2006: 134–136. DOI: 10.1109/IGARSS.2006.39. [20] Klare J, Weiß M, Peters O, et al.. ARTINO: A new high resolution 3D imaging radar system on an autonomous airborne platform[C]. Proceedings of 2006 IEEE International Symposium on Geoscience and Remote Sensing, Denver, USA, 2006: 3842–3845. [21] Palm S, Oriot H M, and Cantalloube H M. Radargrammetric DEM extraction over urban area using circular SAR imagery[J]. IEEE Transactions on Geoscience and Remote Sensing, 2012, 50(11): 4720–4725. DOI: 10.1109/TGRS.2012.2191414 [22] Ponce O, Prats P, Rodriguez-Cassola M, et al.. Processing of circular SAR trajectories with fast factorized back-projection[C]. Proceedings of 2011 IEEE International Geoscience and Remote Sensing Symposium, Vancouver, Canada, 2011: 3692–3695. [23] Ponce O, Prats-Iraola P, Scheiber R, et al. First airborne demonstration of holographic SAR tomography with fully polarimetric multicircular acquisitions at L-band[J]. IEEE Transactions on Geoscience and Remote Sensing, 2016, 54(10): 6170–6196. DOI: 10.1109/TGRS.2016.2582959 [24] 王斌. 多基线SAR三维成像的参数化模型和方法研究[D]. [博士论文], 中国科学院研究生院, 2010.Wang Bin. Parametric algorithms of multi-baseline synthetic aperture radar[D]. [Ph.D. dissertation], University of Chinese Academy of Sciences, 2010. [25] Wang B, Wang Y P, Hong W, et al. Studies on MB-SAR 3D imaging algorithm using Yule-walker method[J]. Science China Information Sciences, 2010, 53(9): 1848–1859. DOI: 10.1007/s11432-010-4040-7 [26] 毕辉. 基于稀疏信号处理的SAR/TomoSAR成像方法研究[D]. [博士论文], 中国科学院大学, 2017.Bi Hui. Study on sparse signal processing based SAR/TomoSAR imaging methods[D]. [Ph.D. dissertation], University of Chinese Academy of Sciences, 2017. [27] Bi H, Zhang B C, and Hong W. Matrix completion-based distributed compressive sensing for polarimetric SAR tomography[J]. Science China Information Sciences, 2015, 58(11): 1–3. DOI: 10.1007/S11432-015-5395-6 [28] Bi H, Zhang B C, and Hong W. Lq regularization-based unobserved baselines’ data estimation method for tomographic synthetic aperture radar inversion[J]. Journal of Applied Remote Sensing, 2016, 10(3): 035014. DOI: 10.1117/1.JRS.10.035014 [29] Bi H, Liu J G, Zhang B C, et al. Baseline distribution optimization and missing data completion in wavelet-based CS-TomoSAR[J]. Science China Information Sciences, 2018, 61(4): 042302. DOI: 10.1007/s11432-016-9068-y [30] 彭学明. 机载下视稀疏阵列3D SAR分布式大场景回波模拟与成像处理算法研究[D]. [博士论文], 中国科学院大学, 2014.Peng Xue-ming. Airborne downward looking sparse linear array three dimensional synthetic aperture radar distriubted large imaging scene echo simualtion and imaging algorithm research[D]. [Ph.D. dissertation], University of Chinese Academy of Sciences, 2014. [31] Peng X M, Hong W, Wang Y P, et al. Polar format imaging algorithm with wave-front curvature phase error compensation for airborne DLSLA three-dimensional SAR[J]. IEEE Geoscience and Remote Sensing Letters, 2014, 11(6): 1036–1040. DOI: 10.1109/LGRS.2013.2282335 [32] Peng X M, Wang Y P, Hong W, et al. Autonomous Narigation airborne forward looking SAR high precision pseudopolar format imaging with ourlapped sub-aperture algorithm[J]. Remote Sensing, 2013, 5(11). [33] Peng X M, Wang Y P, Hong W, et al. Airborne downward looking sparse linear array 3-D SAR heterogeneous parallel simulation[J]. Remote Sensing, 2013, 5(10): 5304–5329. DOI: 10.3390/rs5105304 [34] 韩阔业. 阵列天线下视3D SAR多通道幅相误差校正成像方法研究[D]. [硕士论文], 中国科学院研究生院, 2011.Han Kuo-ye. Study on multi-channel amplitude-phase errors calibration and imaging methods of downward-looking 3D-SAR based on array antennas[D]. [Master dissertation], University of Chinese Academy of Sciences, 2011. [35] Han K Y, Wang Y P, Tan W X, et al. Efficient pseudopolar format algorithm for down-looking linear-array SAR 3-D imaging[J]. IEEE Geoscience and Remote Sensing Letters, 2015, 12(3): 572–576. DOI: 10.1109/LGRS.2014.2351792 [36] Han K Y, Wang Y P, Chang X K, et al. Generalized pseudopolar format algorithm for radar imaging with highly suboptimal aperture length[J]. Science China Information Sciences, 2015, 58(4): 1–15. DOI: 10.1007/S11432-014-5224-3 [37] 鲍慊. 三维合成孔径雷达稀疏成像方法研究[D]. [博士论文], 中国科学院大学, 2017.Bao Qian. Study on sparse imaging algorithms for three-dimensional synthetic aperture radar[D]. [Ph.D. dissertation], University of Chinese Academy of Sciences, 2017. [38] Bao Q, Peng X M, Wang Z R, et al. DLSLA 3-D SAR imaging based on reweighted gridless sparse recovery method[J]. IEEE Geoscience and Remote Sensing Letters, 2016, 13(6): 841–845. DOI: 10.1109/LGRS.2016.2550057 [39] Bao Q, Peng X M, Lin Y, et al. Suboptimal aperture radar imaging by combination of pseudo-polar formatting and gridless sparse recovery method[J]. Electronics Letters, 2016, 52(9): 765–766. DOI: 10.1049/el.2016.0234 [40] Bao Q, Jiang C L, Lin Y, et al. Measurement matrix optimization and mismatch problem compensation for DLSLA 3-D SAR cross-track reconstruction[J]. Sensors, 2016, 16(8): 1333. DOI: 10.3390/s16081333 [41] Bao Q, Peng X M, Wang Y P, et al. Downward looking sparse linear array 3D SAR imaging algorithm based on back-projection and convex optimization[J]. Journal of Electronics(China) , 2014, 31(4): 298–309. DOI: 10.1007/s11767-014-4095-5 [42] 杨晓琳. 线阵成像雷达系统设计及幅相误差一致性校正方法研究[D]. [博士论文], 中国科学院研究生院, 2014.Yang Xiao-lin. Research on system design and amplitude/phase errors correction for linear array imaging radar[D]. [Ph.D. dissertation], University of Chinese Academy of Sciences, 2014. [43] 杨晓琳, 谭维贤, 乞耀龙, 等. 基于单特显点目标回波的阵列3D SAR幅相误差一致性校正方法研究[J]. 雷达学报, 2014, 3(4): 409–418. DOI: 10.3724/SP.J.1300.2014.14037Yang Xiao-lin, Tan Wei-xian, Qi Yao-long, et al. Amplitude and phase errors correction for array 3D SAR system based on single prominent point like target echo data[J]. Journal of Radars, 2014, 3(4): 409–418. DOI: 10.3724/SP.J.1300.2014.14037 [44] 丁振宇, 谭维贤, 王彦平, 等. 基于波数域子孔径的机载三维SAR偏航角运动误差补偿[J]. 雷达学报, 2015, 4(4): 467–473. DOI: 10.12000/JR15016Ding Zhen-yu, Tan Wei-xian, Wang Yan-ping, et al. Yaw angle error compensation for airborne 3-D SAR based on wavenumber-domain subblock[J]. Journal of Radars, 2015, 4(4): 467–473. DOI: 10.12000/JR15016 [45] 丁振宇. 机载下视觉阵列三维SAR运动补偿方法研究[D]. [博士论文], 中国科学院大学, 2015.Ding Zhen-yu. Research on airborne downward looking array three dimensional synthetic aperture radar motion compensation method[D]. [Ph.D. dissertation], University of Chinese Academy of Sciences, 2015. [46] 林赟. 圆迹合成孔径雷达成像算法研究[D]. [博士论文], 中国科学院研究生院, 2011.Lin Yun. Study on algorithms for circular synthetic aperture radar imaging[D]. [Ph.D. dissertation], University of Chinese Academy of Sciences, 2011. [47] 林赟, 谭维贤, 洪文, 等. 圆迹SAR极坐标格式算法研究[J]. 电子与信息学报, 2010, 32(12): 2802–2807. DOI: 10.3724/SP.J.1146.2010.00003Lin Yun, Tan Wei-xian, Hong Wen, et al. Polar format algorithm for circular synthetic aperture radar[J]. Journal of Electronics&Information Technology, 2010, 32(12): 2802–2807. DOI: 10.3724/SP.J.1146.2010.00003 [48] Lin Y, Hong W, Tan W X, et al. Extension of range migration algorithm to squint circular SAR imaging[J]. IEEE Geoscience and Remote Sensing Letters, 2011, 8(4): 651–655. DOI: 10.1109/LGRS.2010.2098843 [49] 洪文, 林赟, 谭维贤, 等. 地球同步轨道圆迹SAR研究[J]. 雷达学报, 2015, 4(3): 241–253. DOI: 10.12000/JR15062Hong Wen, Lin Yun, Tan Wei-xian, et al. Study on geosynchronous circular SAR[J]. Journal of Radars, 2015, 4(3): 241–253. DOI: 10.12000/JR15062 [50] 刘启. 地球同步轨道圆迹SAR成像方法研究[D]. [博士论文], 中国科学院电子学研究所, 2012: 1–18.Liu Qi. Investigation on the imaging methods for geosynchronous circular SAR[D]. [Ph.D. dissertation], Institute of Electronics, Chinese Academy of Sciences, 2012: 1–18. [51] Liu Q, Hong W, Tan W X, et al. An improved polar format algorithm with performance analysis for geosynchronous circular SAR 2D imaging[J]. Progress in Electromagnetics Research, 2011, 119: 155–170. DOI: 10.2528/PIER11060503 [52] 洪文. 圆迹SAR成像技术研究进展[J]. 雷达学报, 2012, 1(2): 124–135. DOI: 10.3724/SP.J.1300.2012.20046Hong Wen. Progress in circular SAR imaging technique[J]. Journal of Radars, 2012, 1(2): 124–135. DOI: 10.3724/SP.J.1300.2012.20046 [53] 刘婷. 基于DEM提取技术的机载圆迹SAR三维成像方法研究[D]. [硕士论文], 中国科学院大学, 中国科学院研究生院, 2012.Liu Ting. Three-dimensional imaging Based on the technique of DEM extraction in Airborne Circular SAR[D]. [Master dissertation], University of Chinese Academy of Sciences, 2012. [54] Lin Y, Hong W, Tan W X, et al. Interferometric circular SAR method for three-dimensional imaging[J]. IEEE Geoscience and Remote Sensing Letters, 2011, 8(6): 1026–1030. DOI: 10.1109/LGRS.2011.2150732 [55] 侯丽英. 干涉圆迹SAR的典型目标全方位三维重建方法研究[D]. [硕士论文], 中国科学院大学, 2016.Hou Li-ying. Interferometric circular SAR all-around 3D reconstruction method study on typical target[D]. [Master dissertation], University of Chinese Academy of Sciences, 2016. [56] 侯丽英, 林赟, 洪文. 干涉圆迹SAR的目标三维重建方法研究[J]. 雷达学报, 2016, 5(5): 538–547. DOI: 10.12000/JR16009Hou Li-ying, Lin Yun, and Hong Wen. Three-dimensional reconstruction method study based on interferometric circular SAR[J]. Journal of Radars, 2016, 5(5): 538–547. DOI: 10.12000/JR16009 [57] Bao Q, Lin Y, Hong W, et al. Holographic SAR tomography image reconstruction by combination of adaptive imaging and sparse Bayesian inference[J]. IEEE Geoscience and Remote Sensing Letters, 2017, 14(8): 1248–1252. DOI: 10.1109/LGRS.2017.2704601 [58] 乞耀龙. 近景微波三维成像模型与方法研究[D]. [博士论文], 中国科学院研究生院, 2012.Qi Yao-long. Study on imaging model and algorithms for near range three-dimensional microwave imaging[D]. [Ph.D. dissertation], University of Chinese Academy of Sciences, 2012. -











计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

