
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
A Three-dimensional Imaging Algorithm Fusion with ω-K and BP Algorithm for Millimeter-wave Cylindrical Scanning
-
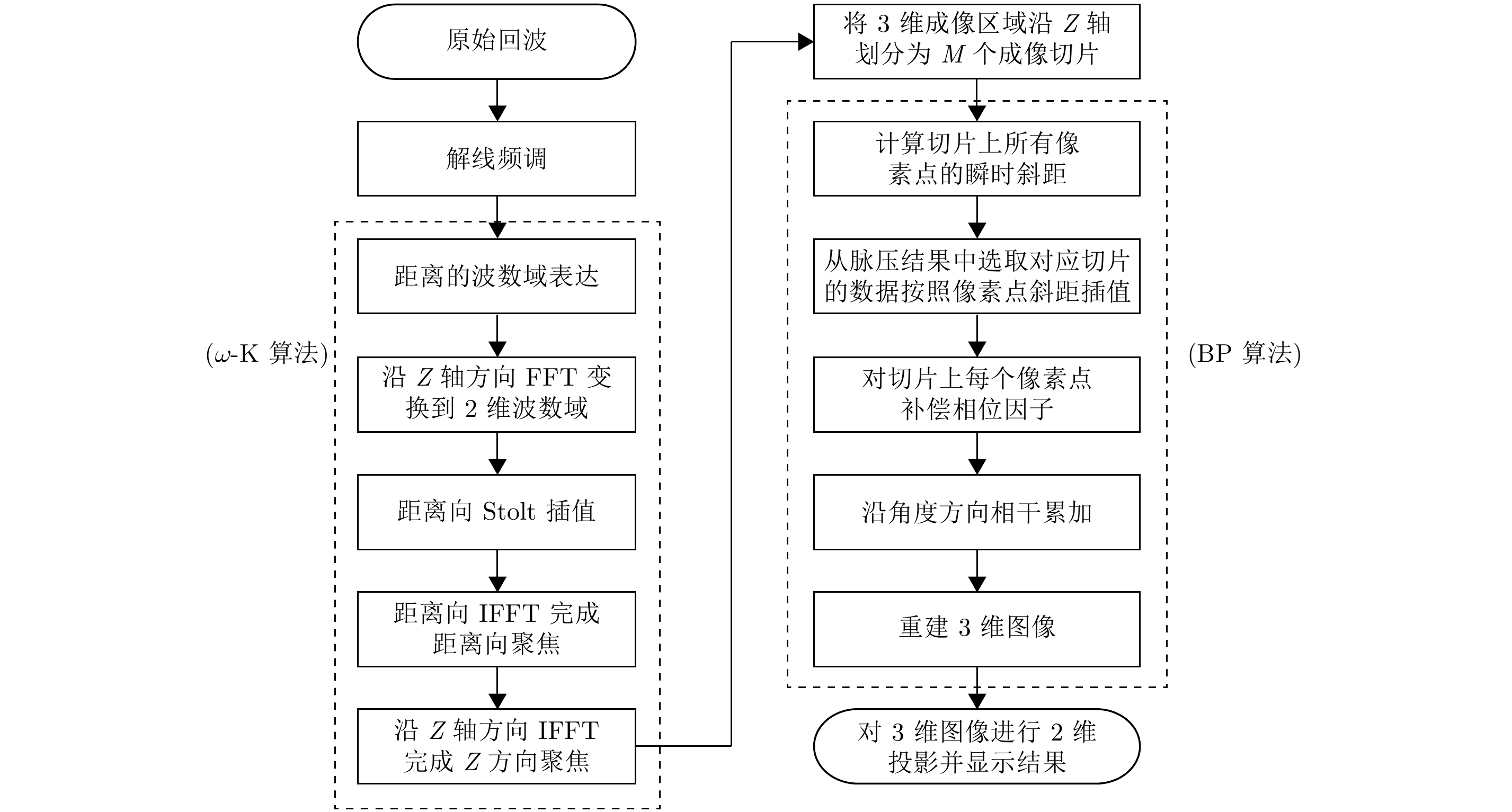
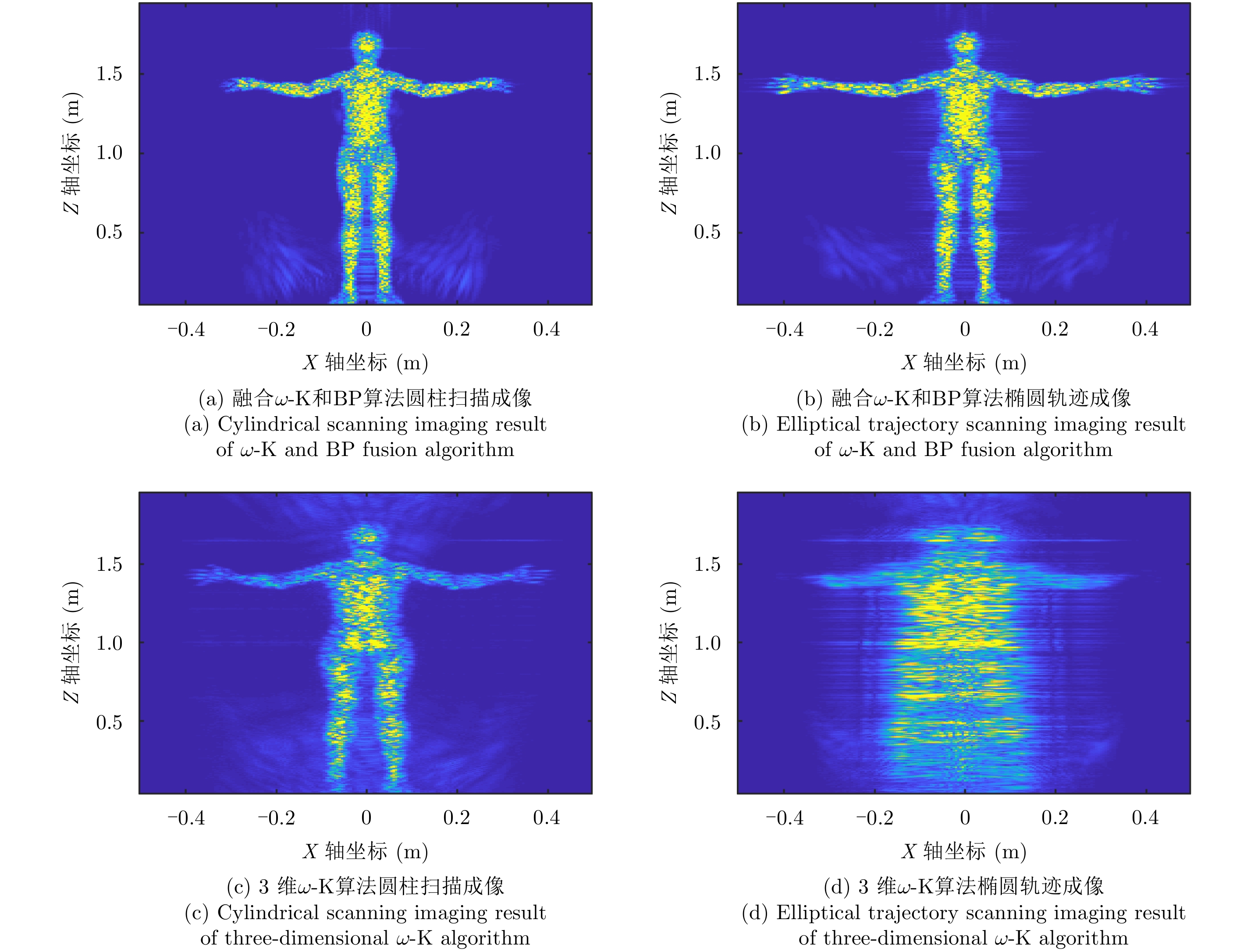
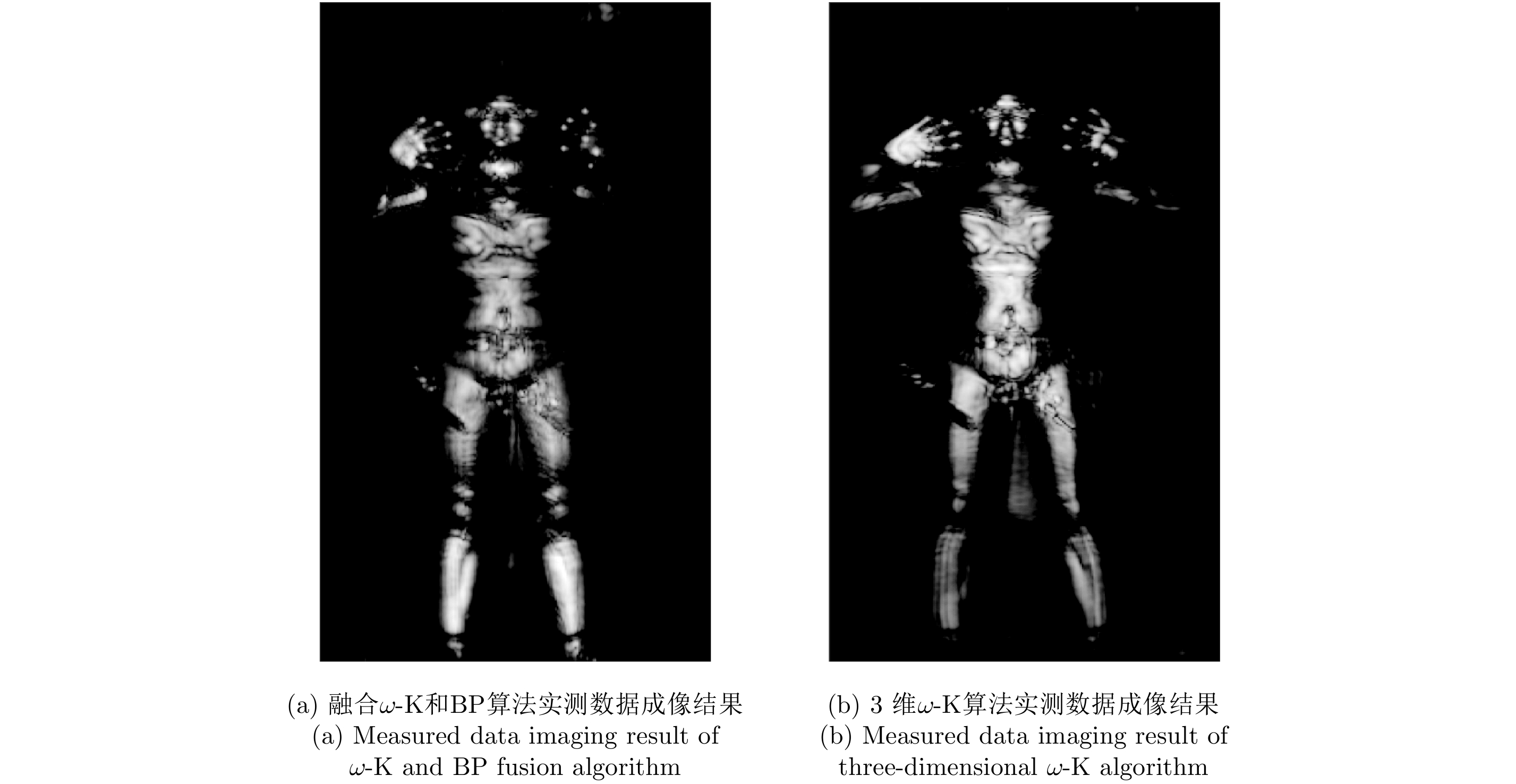
摘要: 结合主动式圆柱扫描毫米波3维成像安检仪的实际应用需求,该文提出一种用于3维场景重建的新方法。该方法采用ω-K算法实现天线阵列方向和距离方向的解耦合与聚焦,再采用后向投影(BP)算法进行距离方向和角度方向的合成孔径处理实现聚焦,进而实现3维场景的重建。3维人体模型仿真和实测数据处理结果表明,该方法具备理论可行性和工程适用性,除此之外,该文方法在CUDA平台下可以实现快速精确3维人体成像,并且能够适应非理想圆柱扫描轨迹3维成像应用。Abstract: A new Three-Dimensional (3D) scene reconstruction method is proposed to meet the practical application requirement of the active cylindrical scanning millimeter-wave 3D imaging security apparatus. Specifically, the ω-K algorithm is firstly used to realize the decoupling and focusing between the antenna array direction and the range direction, then the synthetic aperture processing between the distance and angle direction is performed to achieve the focusing with the Back Projection (BP) algorithm, realizing the fully 3D scene reconstruction. The echo data processing results of the simulated and measured 3D human model show that this method is theoretical feasible with good practical applicability. Besides, the proposed method could realize the fast and accurate 3D human imaging by CUDA platform and be applicable to the nonideal cylindrical scanning 3D imaging scenarios.
-
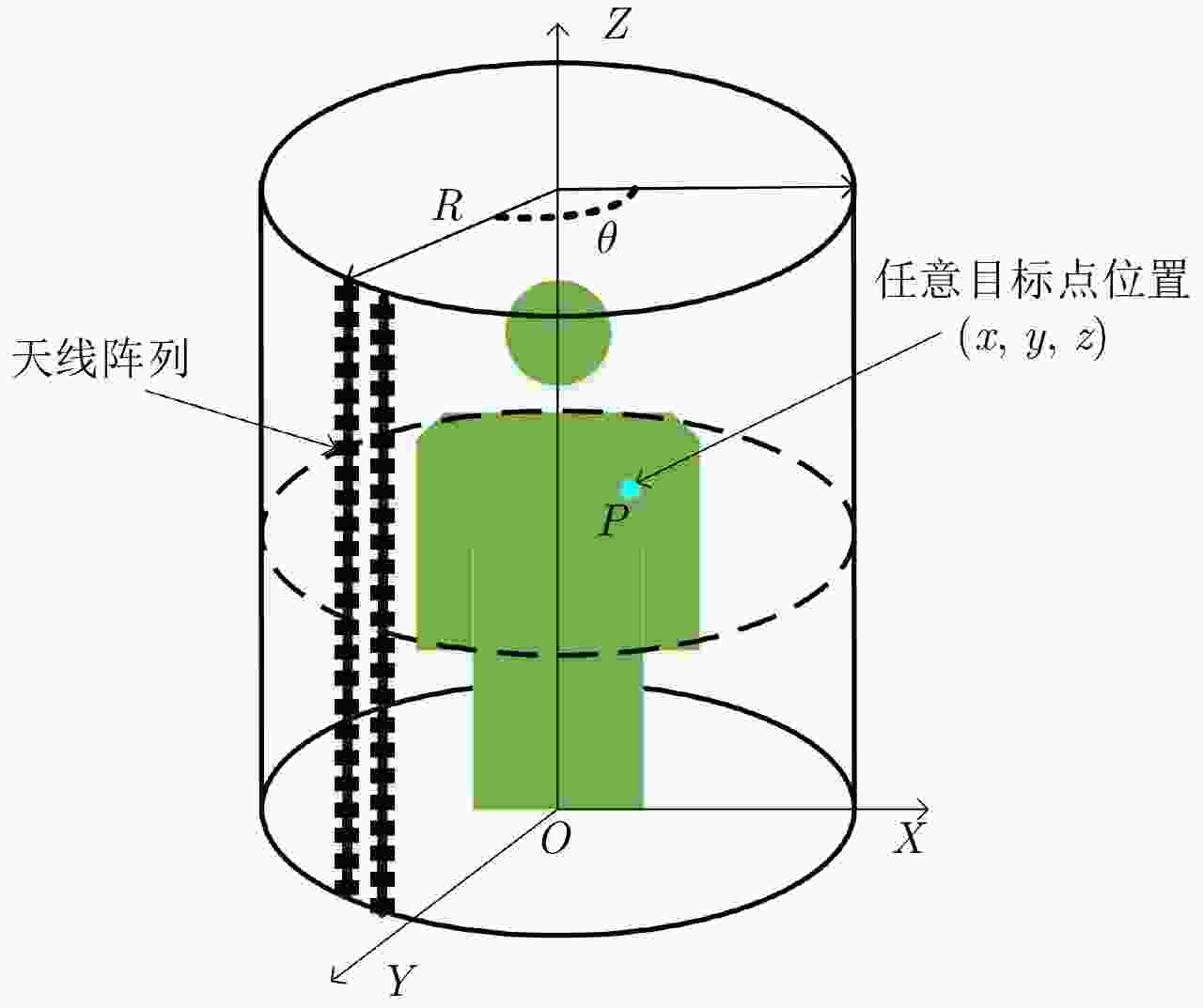
图 1 圆柱扫描3维成像系统模型
Figure 1. Three-dimensional imaging system model of cylindrical scanning
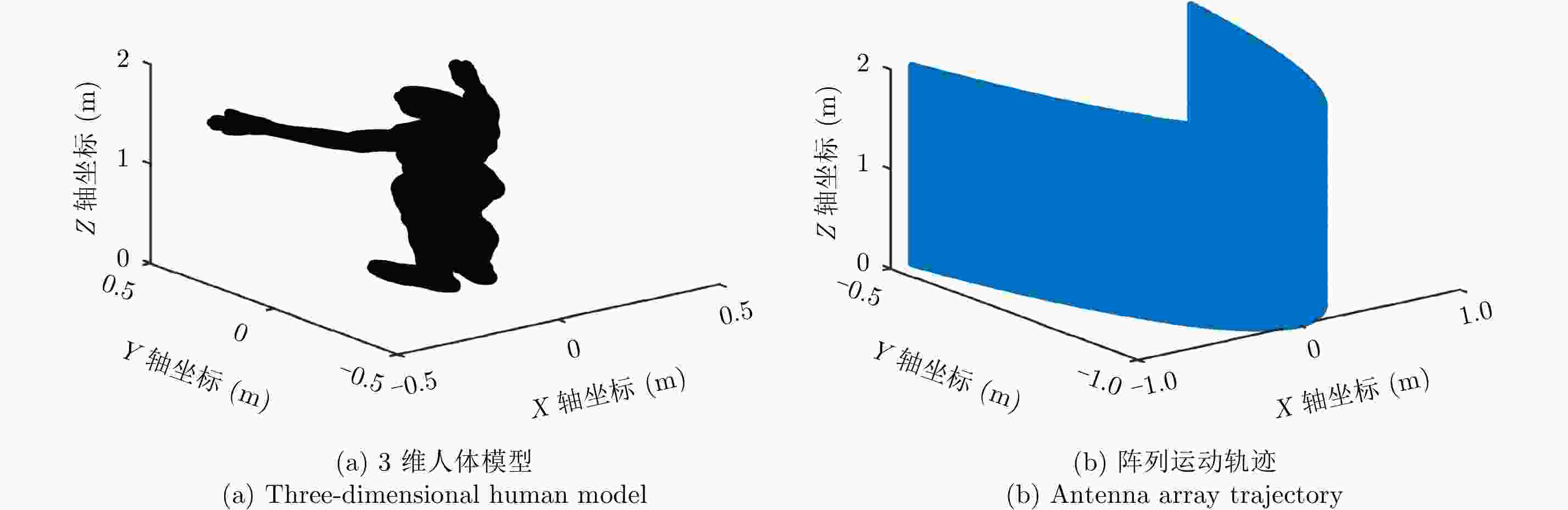
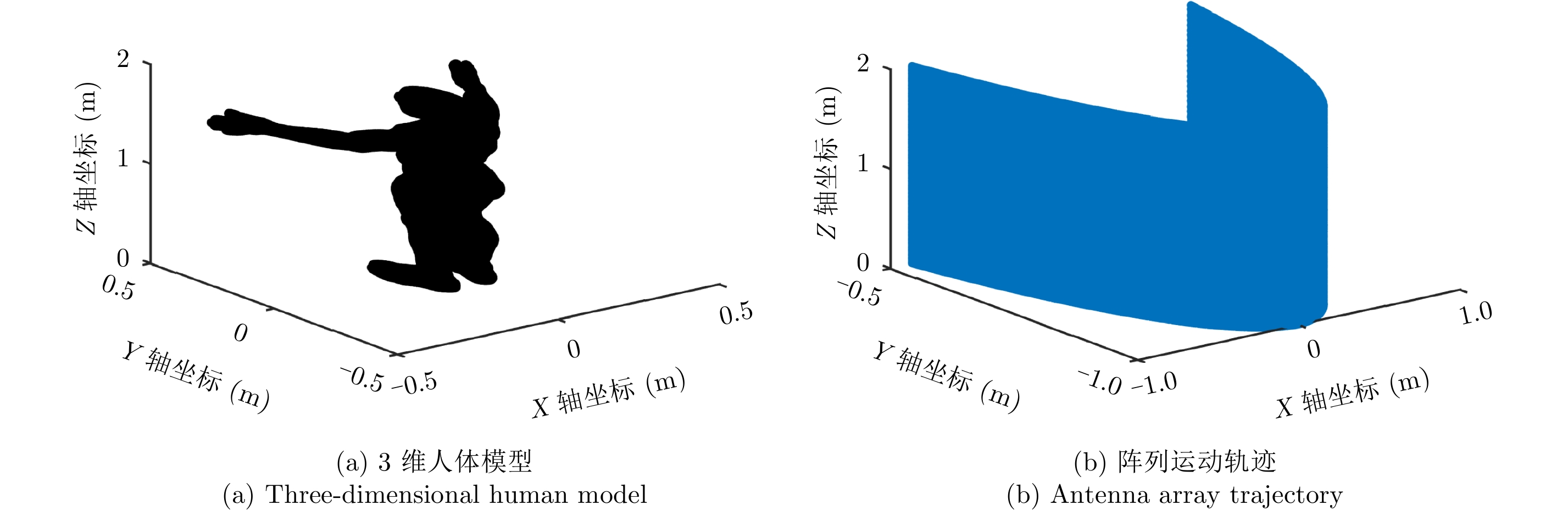
图 4 3维人体模型及阵列运动轨迹
Figure 4. Three-dimensional human model and the trajectory of antenna array
-
[1] 费鹏, 方维海, 温鑫, 等. 用于人员安检的主动毫米波成像技术现状与展望[J]. 微波学报, 2015, 31(2): 91–96. DOI: 10.14183/j.cnki.1005-6122.201502020Fei Peng, Fang Wei-hai, Wen Xin, et al. State of the art and future prospect of the active millimeter wave imaging technique for personnel screening[J]. Journal of Microwaves, 2015, 31(2): 91–96. DOI: 10.14183/j.cnki.1005-6122.201502020 [2] Salmon N A. 3-D radiometric aperture synthesis imaging[J]. IEEE Transactions on Microwave Theory and Techniques, 2015, 63(11): 3579–3587. DOI: 10.1109/TMTT.2015.2481413 [3] Cheng Hang, Zheng Hai-tao, Jing Han-dan, et al. Three-dimensional near-field surveillance imaging using W-band system[J]. Journal of Infrared and Millimeter Waves, 2017, 36(4): 408–414. DOI: 10.11972/j.issn.1001-9014.2017.04.006 [4] Li X, Li S Y, Zhao G Q, et al.. Multi-polarized millimeter-wave imaging for concealed weapon detection[C]. Proceedings of 2016 IEEE International Conference on Microwave and Millimeter Wave Technology, Beijing, China, 2016, 2: 892–894. DOI: 10.1109/ICMMT.2016.7762477. [5] Weatherall J C, Yam K, Barber J, et al.. Identifying explosives using broadband millimeter-wave imaging[C]. Proceedings of the SPIE Passive and Active Millimeter-Wave Imaging XX, Anaheim, California, United States, 2017, 10189: 1018906. DOI: 10.1117/12.2267192. [6] 温鑫, 黄培康, 年丰, 等. 主动式毫米波近距离圆柱扫描三维成像系统[J]. 系统工程与电子技术, 2014, 36(6): 1044–1049. DOI: 10.3969/j.issn.1001-506X.2014.06.05Wen Xin, Huang Pei-kang, Nian Feng, et al. Active millimeter-wave near-field cylindrical scanning three-dimensional imaging system[J]. Systems Engineering and Electronics, 2014, 36(6): 1044–1049. DOI: 10.3969/j.issn.1001-506X.2014.06.05 [7] Sheen D M, Hall T E, McMakin D L, et al.. Three-dimensional radar imaging techniques and systems for near-field applications[C]. Proceedings of the SPIE Radar Sensor Technology XX, Baltimore, Maryland, United States, 2016, 9829: 1–12. DOI: 10.1117/12.2229235. [8] Sheen D M and Hall T E. Calibration, reconstruction, and rendering of cylindrical millimeter-wave image data[C]. Proceedings of the SPIE Passive Millimeter-Wave Imaging Technology XIV, Orlando, Florida, United States, 2011, 8022: 80220H. DOI: 10.1117/12.887922. [9] 田鹤, 李道京, 祁春超. 频域稀疏毫米波人体安检成像处理和快速成像稀疏阵列设计[J]. 雷达学报, 待出版, DOI: 10.12000/JR17082.Tian He, Li Dao-jing, and Qi Chun-chao. Millimeter-wave human security imaging based on frequency-domain sparsity and rapid imaging sparse array architecture[J]. Journal of Radars, in press, DOI: 10.12000/JR17082. [10] 笪敏, 戚仁涛, 杨军, 等. 基于BP算法的斜下视圆弧扫描毫米波成像实验[J]. 电子科技, 2017, 30(3): 17–20, 25. DOI: 10.16180/j.cnki.issn1007-7820.2017.03.006Da Min, Qi Ren-tao, Yang Jun, et al. Millimeter wave imaging experiment under inclined side arc scanning based on back projection algorithm[J]. Electronic Science and Technology, 2017, 30(3): 17–20, 25. DOI: 10.16180/j.cnki.issn1007-7820.2017.03.006 [11] 谭维贤, 洪文, 王彦平, 等. 基于波数域积分的人体表面微波三维成像算法研究[J]. 电子与信息学报, 2009, 31(11): 2541–2545. DOI: 10.3724/SP.J.1146.2008.01671Tan Wei-xian, Hong Wen, Wang Yan-ping, et al. Three-dimensional microwave imaging algorithm for the surface of the human body based on wavenumber domain integration[J]. Journal of Electronics&Information Technology, 2009, 31(11): 2541–2545. DOI: 10.3724/SP.J.1146.2008.01671 [12] 李烈辰, 李道京, 张清娟. 基于压缩感知的三孔径毫米波合成孔径雷达侧视三维成像[J]. 电子与信息学报, 2013, 35(3): 552–558. DOI: 10.3724/SP.J.1146.2012.01016Li Lie-chen, Li Dao-jing, and Zhang Qing-juan. Three-aperture millimeter-wave SAR side-looking three-dimensional imaging based on compressed sensing[J]. Journal of Electronics&Information Technology, 2013, 35(3): 552–558. DOI: 10.3724/SP.J.1146.2012.01016 [13] 张晓玲, 陈明领, 廖可非, 等. 基于三维SAR成像的RCS近远场变换方法研究[J]. 电子与信息学报, 2015, 37(2): 297–302. DOI: 10.11999/JEIT140535Zhang Xiao-ling, Chen Ming-ling, Liao Ke-fei, et al. Research on methods of targets’ RCS near-field-to-far-field transformation based on 3-D SAR imaging[J]. Journal of Electronics&Information Technology, 2015, 37(2): 297–302. DOI: 10.11999/JEIT140535 -

 下载:
下载:


图(7)
计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

