
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
Radar Target Detection Method of Aircraft Wake Vortices Based on Matrix Information Geometry
-
摘要:
矩阵信息几何在雷达信号处理和目标检测中的应用是一个正在引起关注的研究方向。飞机尾流回波经过傅里叶变换后,其功率谱是展宽的,传统动目标检测(MTD)方法未能对展宽的功率谱进行有效积累。针对飞机尾流目标检测问题,基于矩阵信息几何理论,该文提出了一种矩阵恒虚警率(CFAR)检测方法,该方法中观测数据协方差矩阵构成一个矩阵流形,类比CFAR检测的思想,利用检测单元协方差矩阵与参考单元协方差矩阵均值间定义的距离作为检测统计量。最后利用噪声中仿真的尾流回波数据,分析了黎曼均值的迭代估计性能、尾流目标协方差矩阵与噪声协方差矩阵的测地线距离随信噪比的变化,比较了常规MTD检测方法和矩阵CFAR检测方法的检测性能。
Abstract:The application of matrix information geometry to radar signal processing and target detection is a new and interesting subject. Wake vortices are Doppler-spread after Fourier transform. The traditional Moving Target Detection (MTD) method cannot adequately accumulate returns power of the whole spectrum. Based on matrix information geometry, a matrix Constant False Alarm Rate (CFAR) detection method is proposed to improve the detection performance of a weak wake target. In this method, covariance matrices of the observed data can be constructed into a matrix manifold; compared with CFAR detection, the geodesic distance between the covariance matrix in the detection cell and the mean of covariance matrices in the secondary cell is regarded as the detection statistics. Using simulated wake vortices, the return data in background noise and the iterative estimation performance of Riemannian mean are analyzed; the geodesic distance of covariance matrices of target return and noise with varying signal-noise rate is analyzed; and the detection performance of the matrix CFAR and the conventional MTD method is compared.
-
Key words:
- Aircraft wake vortices /
- Target detection /
- Matrix information geometry /
- Matrix manifold /
- Matrix CFAR
-

图 2 马可尼研究中心X波段雷达测量的功率谱[16]
Figure 2. The Power Spectrum measured by the X-band radar in Marconi Research Center

图 3 基于信息几何的矩阵CFAR检测器框图
Figure 3. Block diagram of CA-CFAR detector based on information geometry

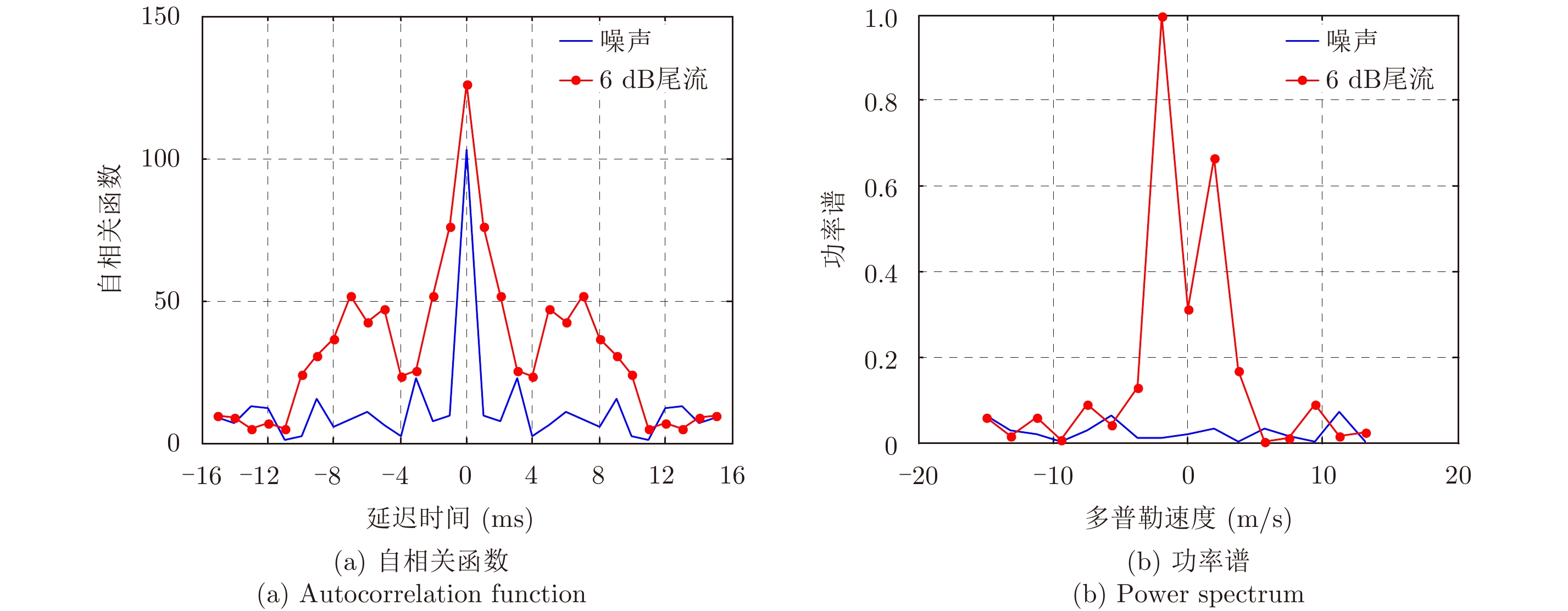
图 4 脉冲个数为16时的自相关函数与功率谱
Figure 4. Autocorrelation function and power spectrum when the pulse number is 16

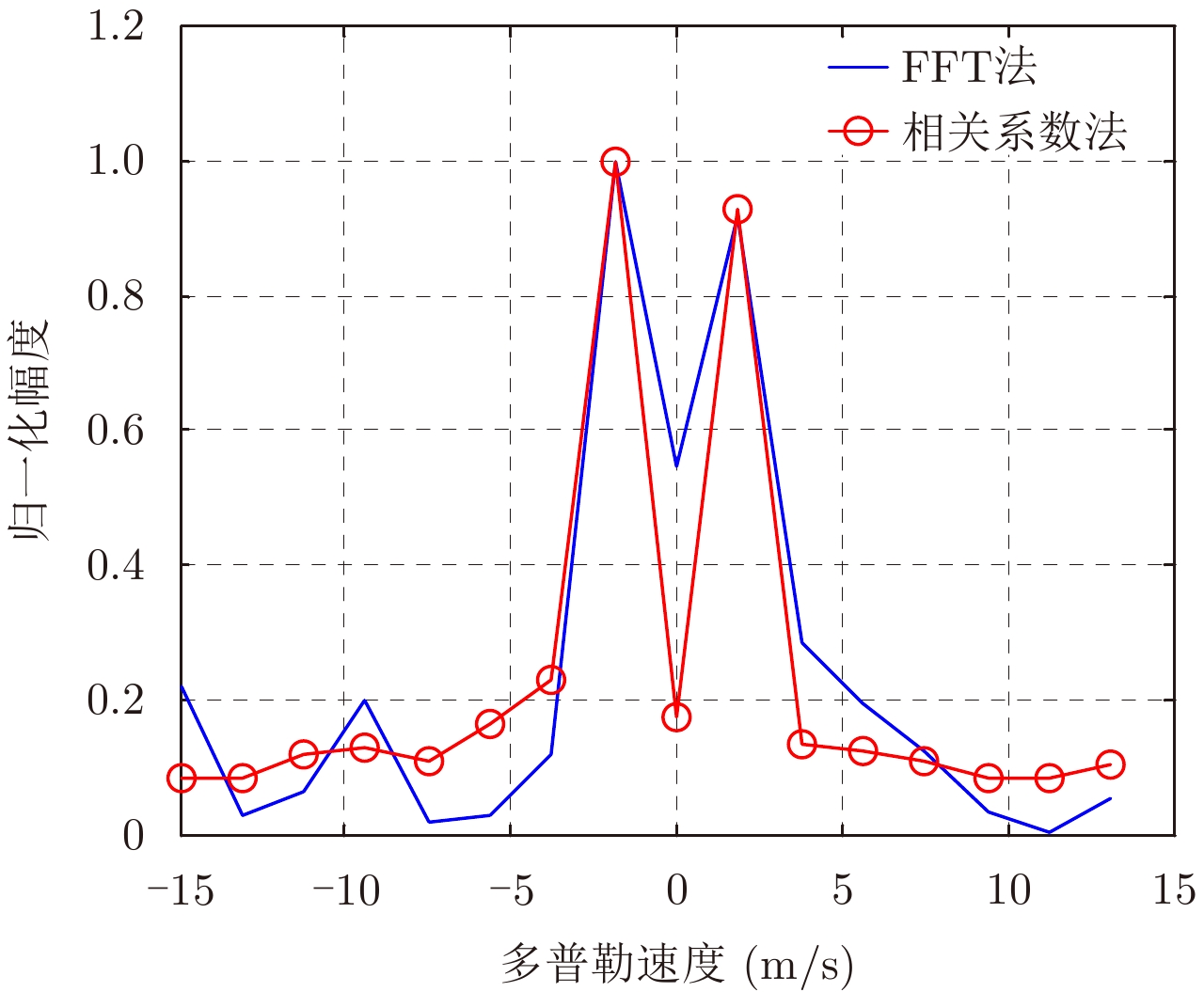
图 5 协方差矩阵降低维数之前与之后的功率谱
Figure 5. The power spectrum before and after the covariance matrix reduces the dimension

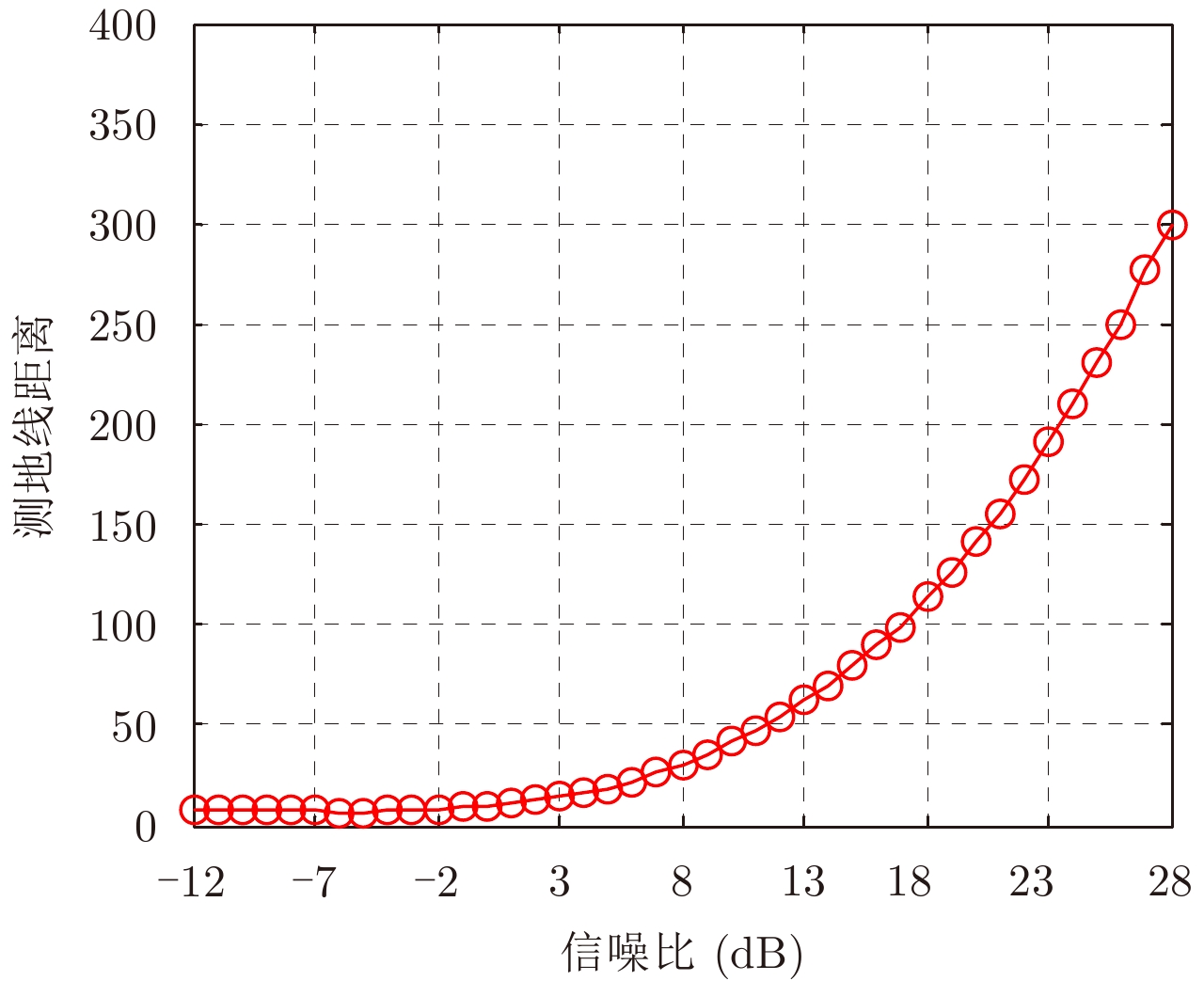
图 6 随SNR的变化测地线距离的变化
Figure 6. The variation of geodesic distance with the variation of SNR

图 8 有无尾流情况下检测统计量的统计直方图
Figure 8. The statistical histogram of detection statistics with and without the vortex target
-
[1] 孙华飞, 张真宁, 彭林玉, 等. 信息几何导引[M]. 北京: 科学出版社, 2016.Sun Hua-fei, Zhang Zhen-ning, Peng Lin-yu, et al.. An Elementary Introduction to Information Geometry[M]. Beijing: Science Press, 2016. [2] Rao C. Information and the accuracy attainable in the estimation of statistical parameters[J]. Bulletin of Calcutta Mathematical Society, 1945, 37: 81–91. [3] Chencov N N. Statistical Decision Rules and Optimal Inference[M]. Rhode Island, USA: American Mathematical Society, 1982. [4] Amari S I and Nagaoka H. Methods of Information Geometry[M]. Providence, RI: American Mathematical Society, 2000. [5] Lenglet C, Rousson M, Deriche R, et al. Statistics on the manifold of multivariate normal distributions: Theory and application to diffusion tensor MRI processing[J]. Journal of Mathematical Imaging and Vision, 2006, 25(3): 423–444. DOI: 10.1007/s10851-006-6897-z [6] Moakher M. A differential geometric approach to the geometric mean of symmetric positive-definite matrices[J]. SIAM Journal on Matrix Analysis and Applications, 2005, 26(3): 735–747. DOI: 10.1137/S0895479803436937 [7] Nielsen F and Bhatia R. Matrix Information Geometry[M]. Berlin Heidelberg: Springer, 2013. [8] Barbaresco F. Interactions between symmetric cone and information geometries: Bruhat-Tits and Siegel spaces models for high resolution autoregressive Doppler imagery[C]. Proceedings of ETVC 2008 Conference, Berlin, Heidelberg, 2009: 124–163. [9] Barbaresco F. Innovative tools for radar signal processing based on Cartan’s geometry of SPD matrices & information geometry[C]. Proceedings of 2008 IEEE Radar Conference, Rome, 2008: 1–6. [10] Pennec X. Intrinsic statistics on Riemannian manifolds: Basic tools for geometric measurements[J]. Journal of Mathematical Imaging and Vision, 2006, 25(1): 127–154. DOI: 10.1007/s10851-006-6228-4 [11] Barbaresco F. Robust statistical radar processing in Fréchet metric space: OS-HDR-CFAR and OS-STAP processing in Siegel homogeneous bounded domains[C]. Proceedings of 2011 IEEE International Radar Symposium, Leipzig, Germany, 2011: 639–644. [12] 黎湘, 程永强, 王宏强, 等. 雷达信号处理的信息几何方法[M]. 北京: 科学出版社, 2014.Li Xiang, Cheng Yong-qiang, Wang Hong-qiang, et al.. Methods of Information Geometry of Radar Signal Processing[M]. Beijing: Science Press, 2014. [13] Broderick A J, Bevilaqua P, Crouch J, et al.. Wake Turbulence: An Obstacle to Increased Air Traffic Capacity[M]. Washington, DC: The National Academies Press, 2008: 1–59. [14] 刘俊凯, 李文臣, 王雪松, 等. 基于多普勒特性的飞机尾流回波提取方法[J]. 系统仿真学报, 2011, 23(7): 1323–1328. DOI: 10.16182/j.cnki.joss.2011.07.015Liu Jun-kai, Li Wen-chen, Wang Xue-song, et al. Extraction of aircraft wake vortices radar returns based on the Doppler characteristics[J]. Journal of System Simulation, 2011, 23(7): 1323–1328. DOI: 10.16182/j.cnki.joss.2011.07.015 [15] Gerz T, Holzäpfel F, and Darracq D. Commercial aircraft wake vortices[J]. Progress in Aerospace Sciences, 2002, 38(3): 181–208. DOI: 10.1016/S0376-0421(02)00004-0 [16] Shephard D J, Kyte A P, and Segura C A. Radar wake vortex measurements at F and I band[C]. Proceedings of IEE Colloquium on Radar and Microwave Imaging, London, 1994: 7/1–7/5. [17] 王首勇, 万洋, 刘俊凯, 等, 著. 现代雷达目标检测理论与方法[M]. 第2版, 北京: 科学出版社, 2015.Wang Shou-yong, Wan Yang, Liu Jun-kai, et al.. Modern Radar Target Detection Theory and Methods[M]. Second Edition, Beijing: Science Press, 2015. [18] Calvo M and Oller J M. An explicit solution of information geodesic equations for the multivariate normal model[J]. Statistics&Risk Modeling, 1991, 9(1/2): 119–138. -

 下载:
下载:





计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

