
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
-
摘要:
该文介绍了一种L波段机载重轨干涉合成孔径雷达(SAR)系统及其开展的重轨干涉SAR飞行试验与数据反演研究。重点介绍了系统内定标方法、基于差分全球定位系统/惯性测量单元(DGPS/IMU)组合导航系统的重轨干涉SAR(InSAR)成像处理方法、残余运动误差(RME)估计和补偿算法以及干涉SAR模型下高程反演方法。在实测飞行试验数据中选择了两块具有代表性的试验区域,详细分析了重轨干涉SAR数据的相干性和残余运动补偿的效果,并通过干涉反演得到试验区的高程图(DEM),利用地面测量点验证得到两试验区的高程精度分别为3.40 m和2.85 m。实验结果表明该系统具有重轨干涉SAR数据获取及高精度高程反演能力,这对机载重轨干涉SAR系统设计及重点区域地形测绘具有重要借鉴意义。在飞行航迹控制较好的情况下,该系统可用于差分干涉SAR、极化干涉SAR以及层析SAR等的研究。
Abstract:This paper describes the L-band airborne Synthetic Aperture Radar (SAR) system and an experimental study of repeat-pass SAR interferometry. The discussions mainly focus on the internal calibration method, the imaging method based on Differential Global Positioning System/Inertial Measurement Unit (DGPS/IMU) data, Residual Motion Error (RME) estimation and compensation, and the Digital Elevation Model (DEM) inversion method with Interferometric SAR (InSAR). Two typical test areas were chosen from the acquired SAR data for detailed analyses. The DEMs in these two areas were inversed with repeat-pass InSAR, and comparisons with the measured ground points show errors in these two areas with a standard deviation 3.40 m and 2.85 m, respectively. This demonstrates the good performance of this L-band repeat-pass interferometric SAR system. These results have important significance for the design of airborne repeat-pass InSAR systems and typical terrain mapping. When the flight tracks are under good control, this L-band SAR system is applicable in the fields of differential InSAR, polarimetric InSAR, and tomographic SAR.
-
Key words:
- Repeat-pass SAR interferometry /
- Residual motion error /
- L-band /
- Airborne SAR
-

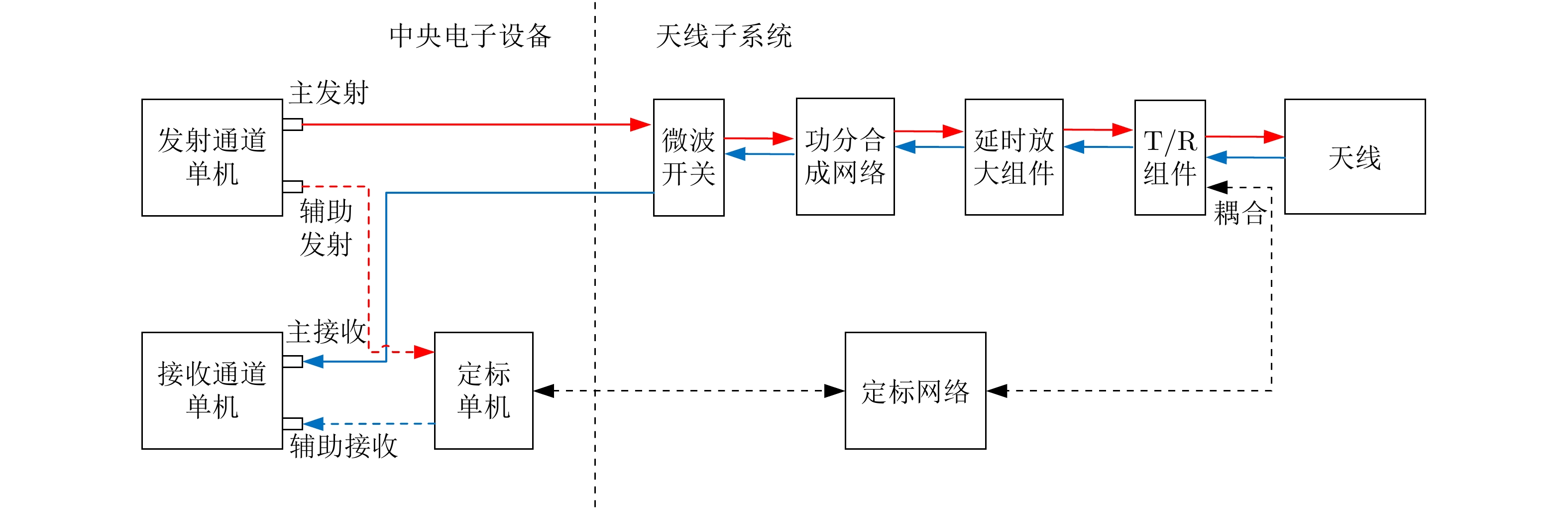
图 1 L波段机载重轨干涉SAR飞行系统
Figure 1. L-band SAR system for airborne repeat-pass interferometry
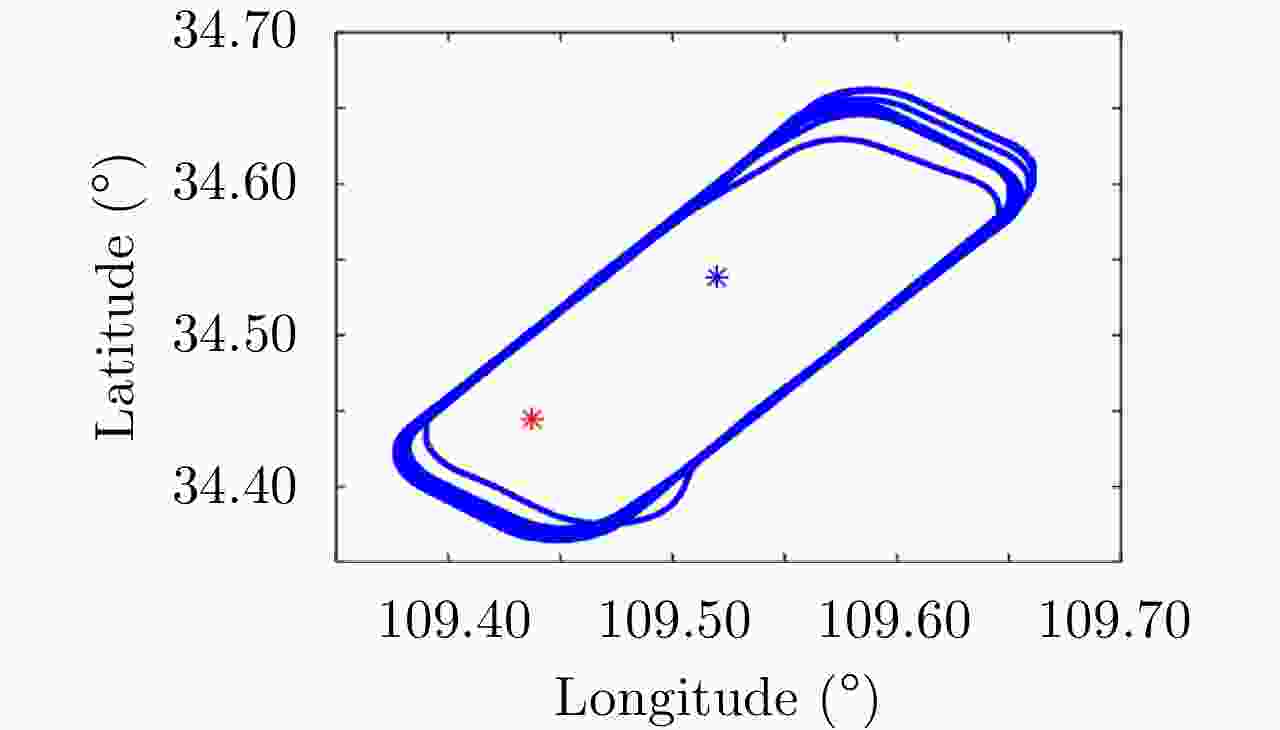
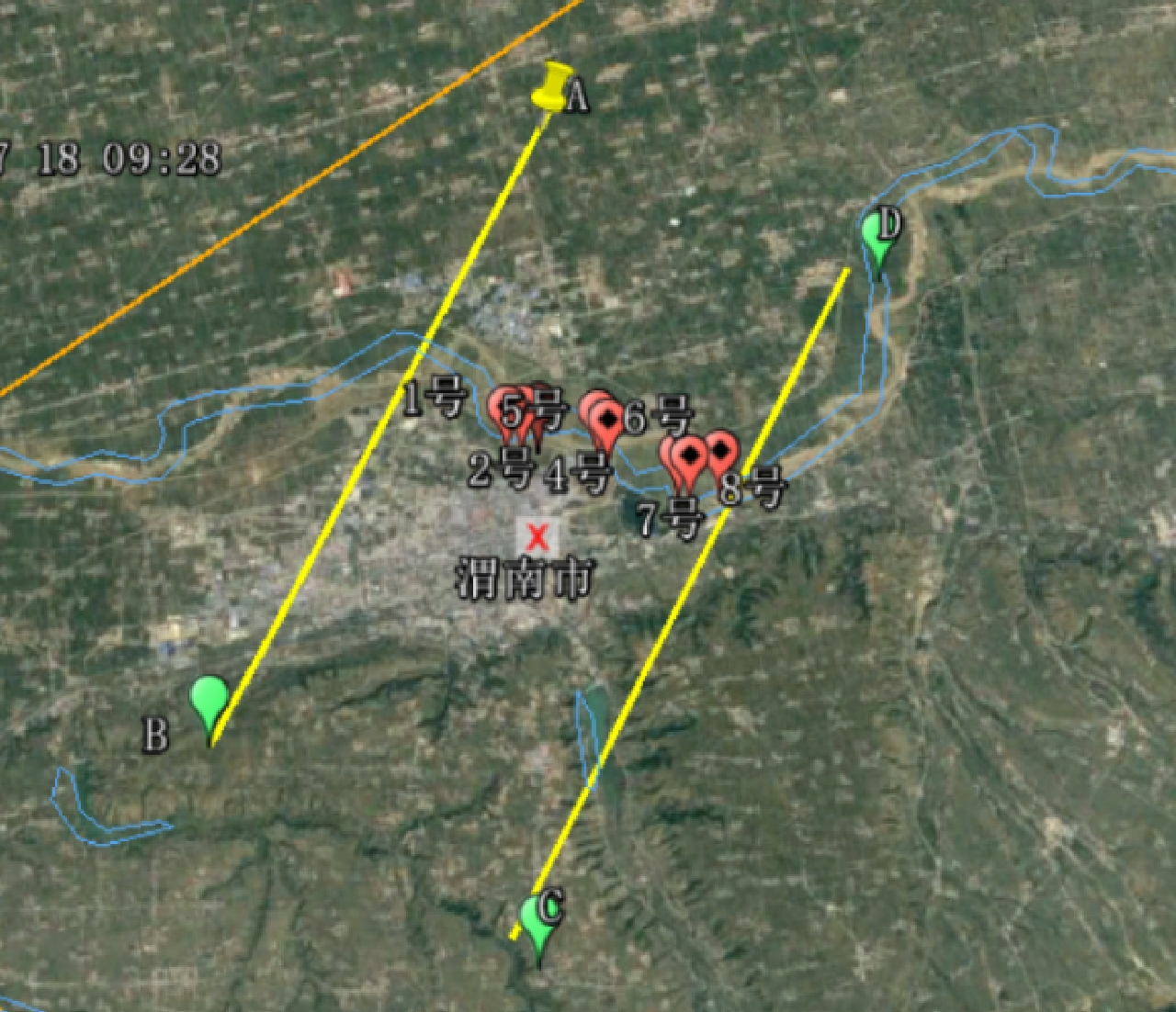
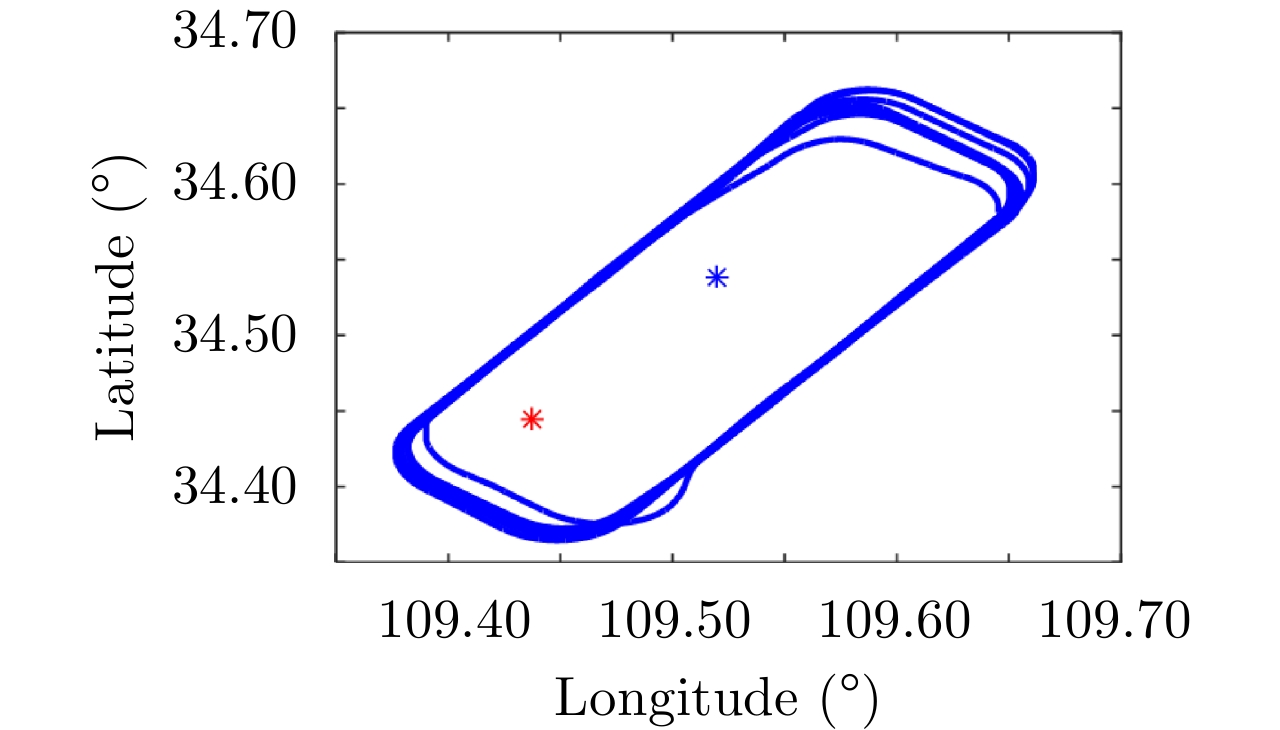
图 5 重轨干涉飞行试验的飞行航迹图
Figure 5. Flight tracks for the repeat-pass interferometric campaign
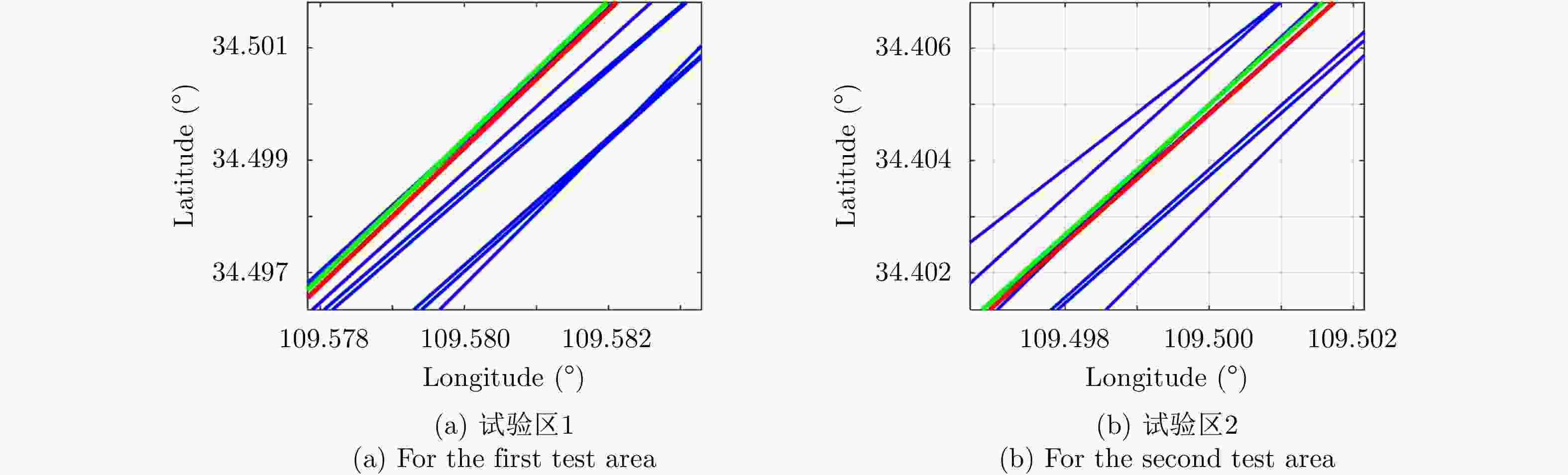
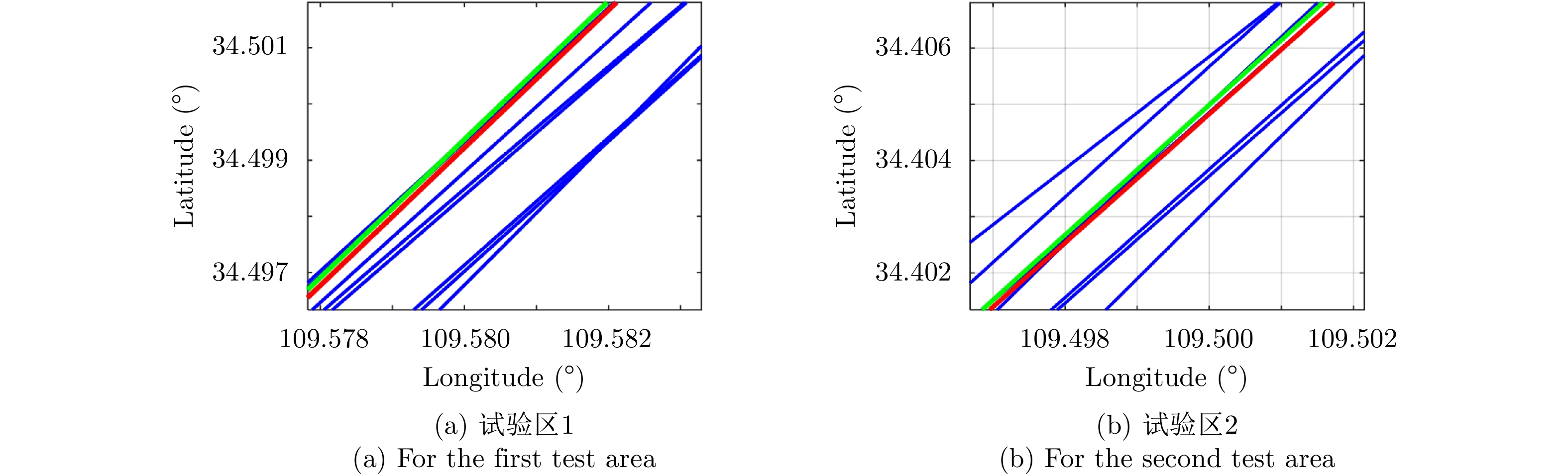
图 6 试验区重轨干涉航迹(局部)
Figure 6. The repeat-pass flight tracks for the test areas (partial)

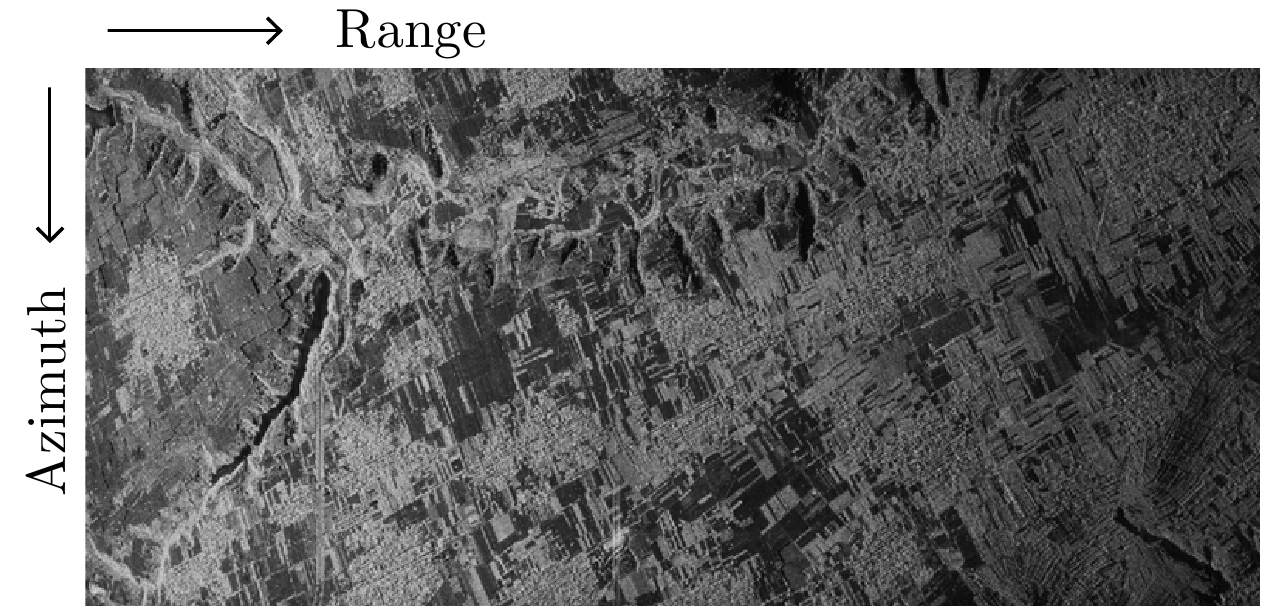
图 7 试验区1的HH极化幅度图
Figure 7. The amplitude image of HH polarization for the first test area
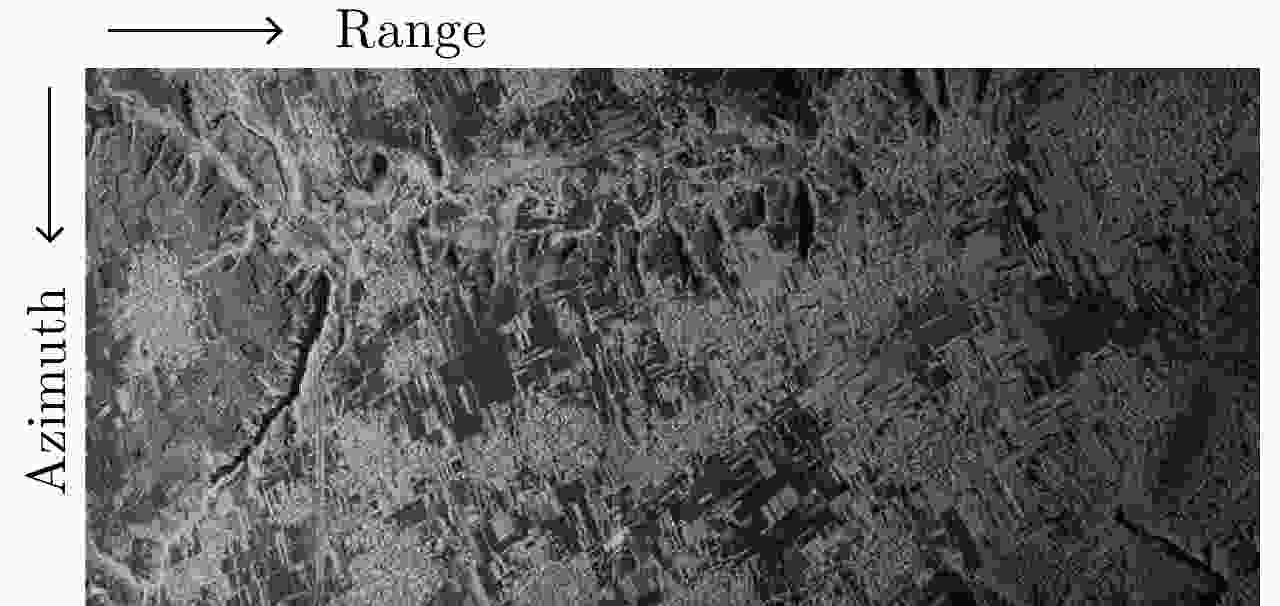
图 8 试验区2的HH极化幅度图
Figure 8. The amplitude image of HH polarization for the second test area
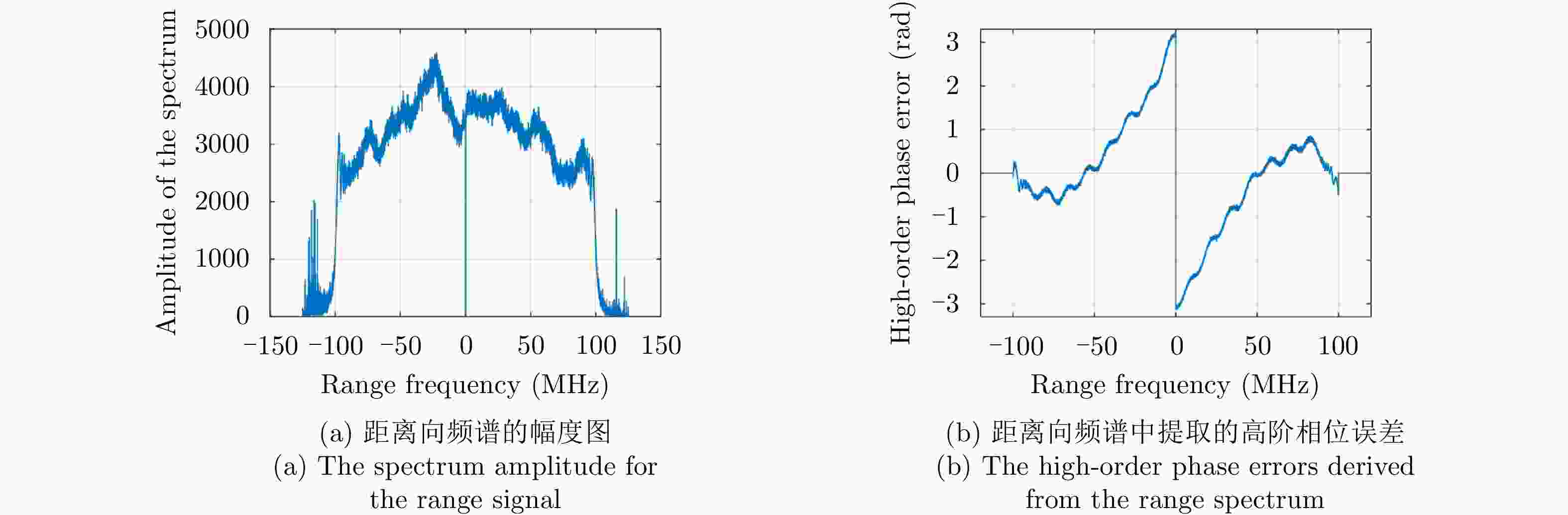
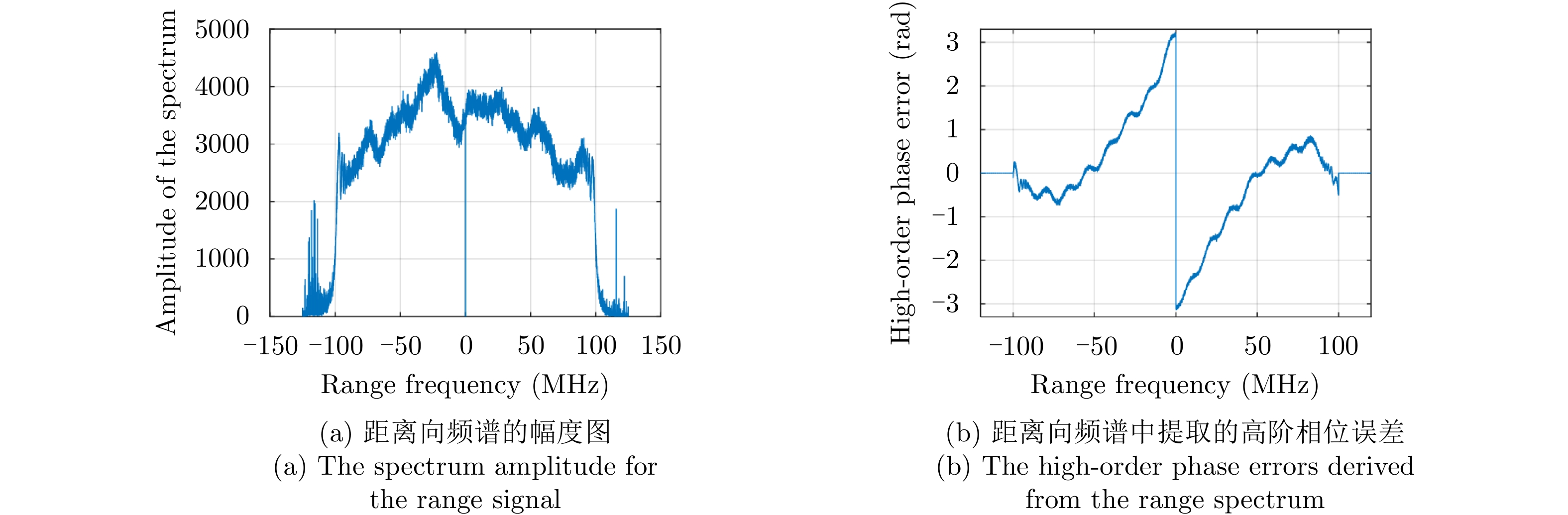
图 9 L波段SAR系统线性调频脉冲信号的幅相误差
Figure 9. The spectrum amplitude and phase errors of the chirp signal for the L-band SAR system
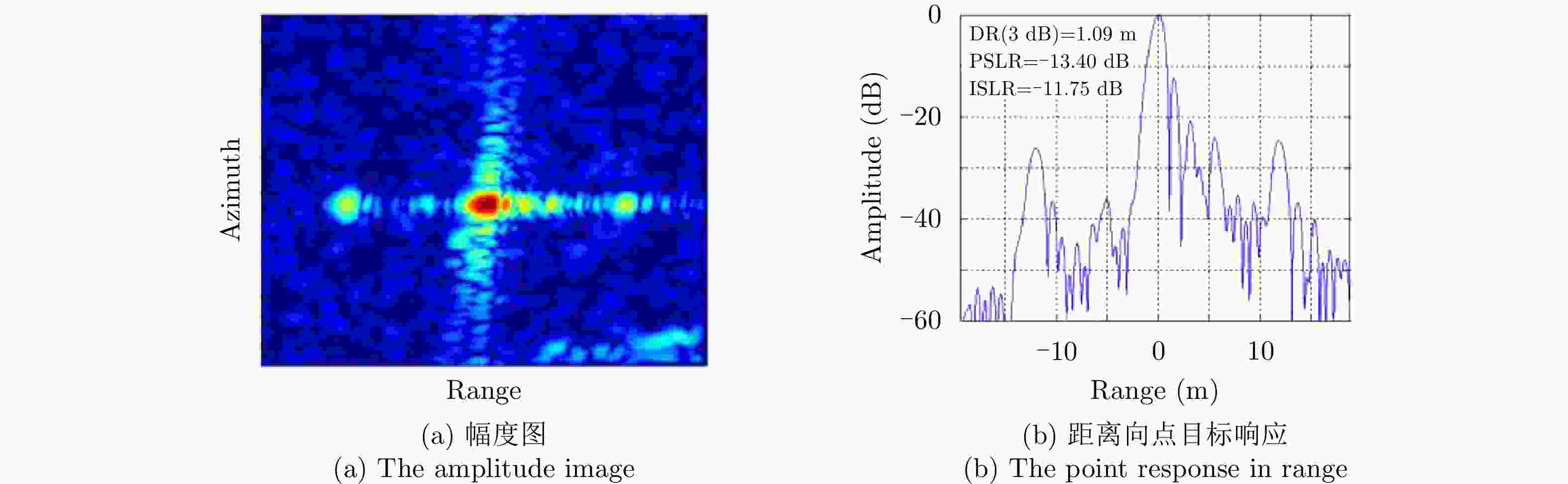
图 10 距离向幅相补偿前的点目标压缩结果
Figure 10. The focused point image before amplitude and phase compensation
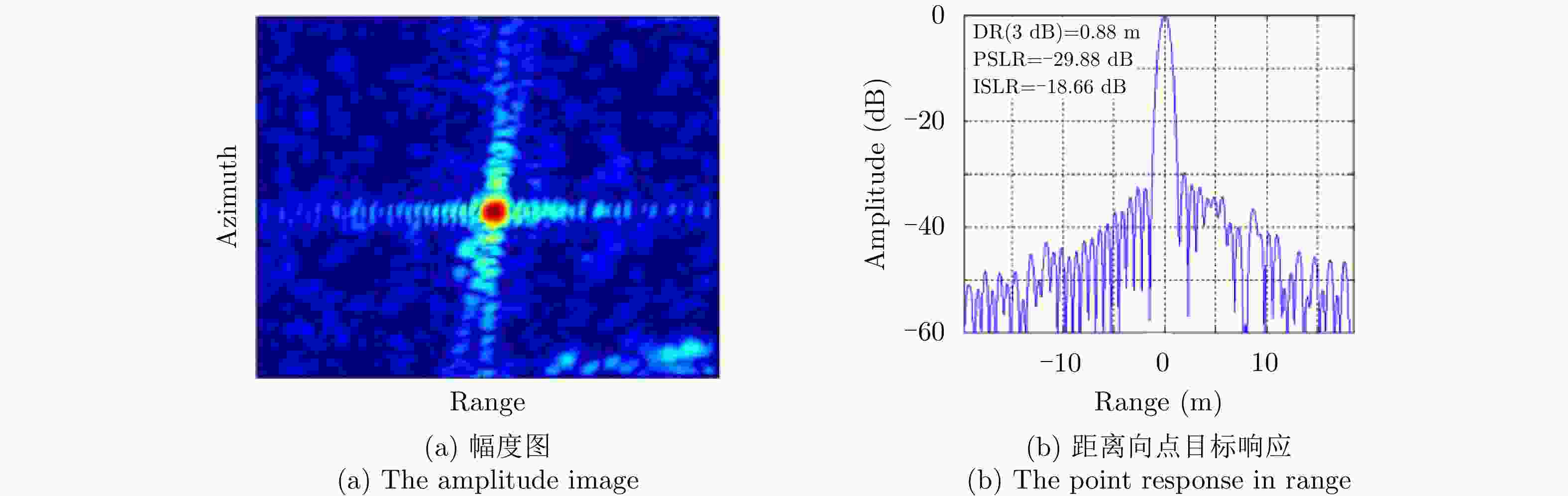
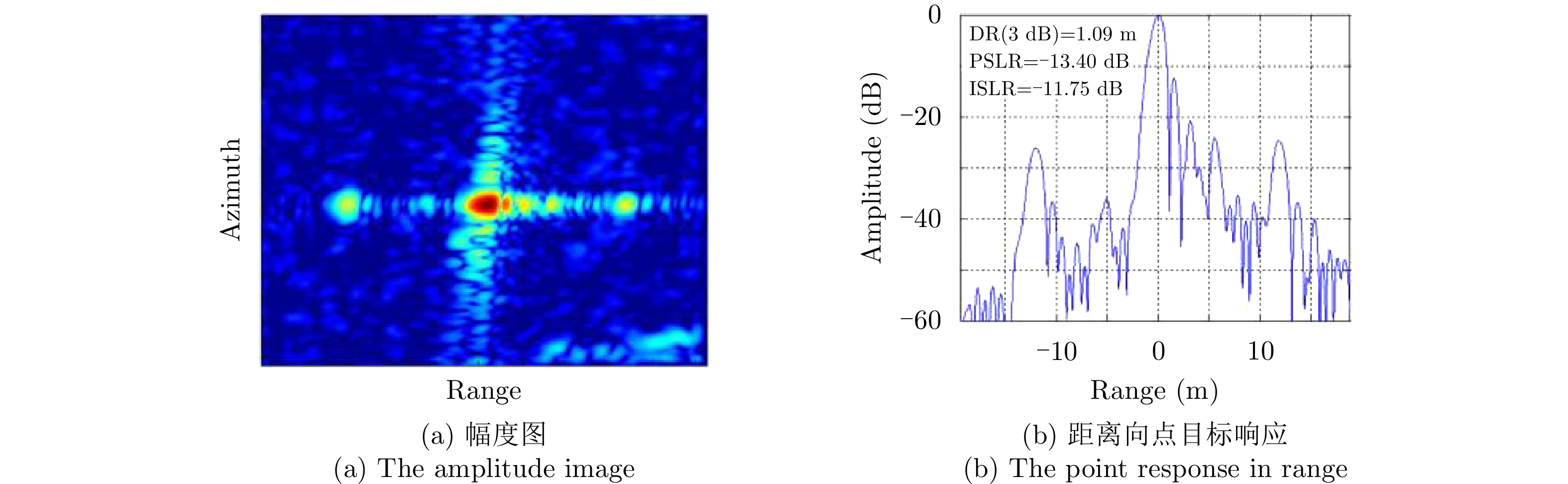
图 11 距离向幅相误差补偿后的点目标压缩结果
Figure 11. The focused point image after amplitude and phase compensation

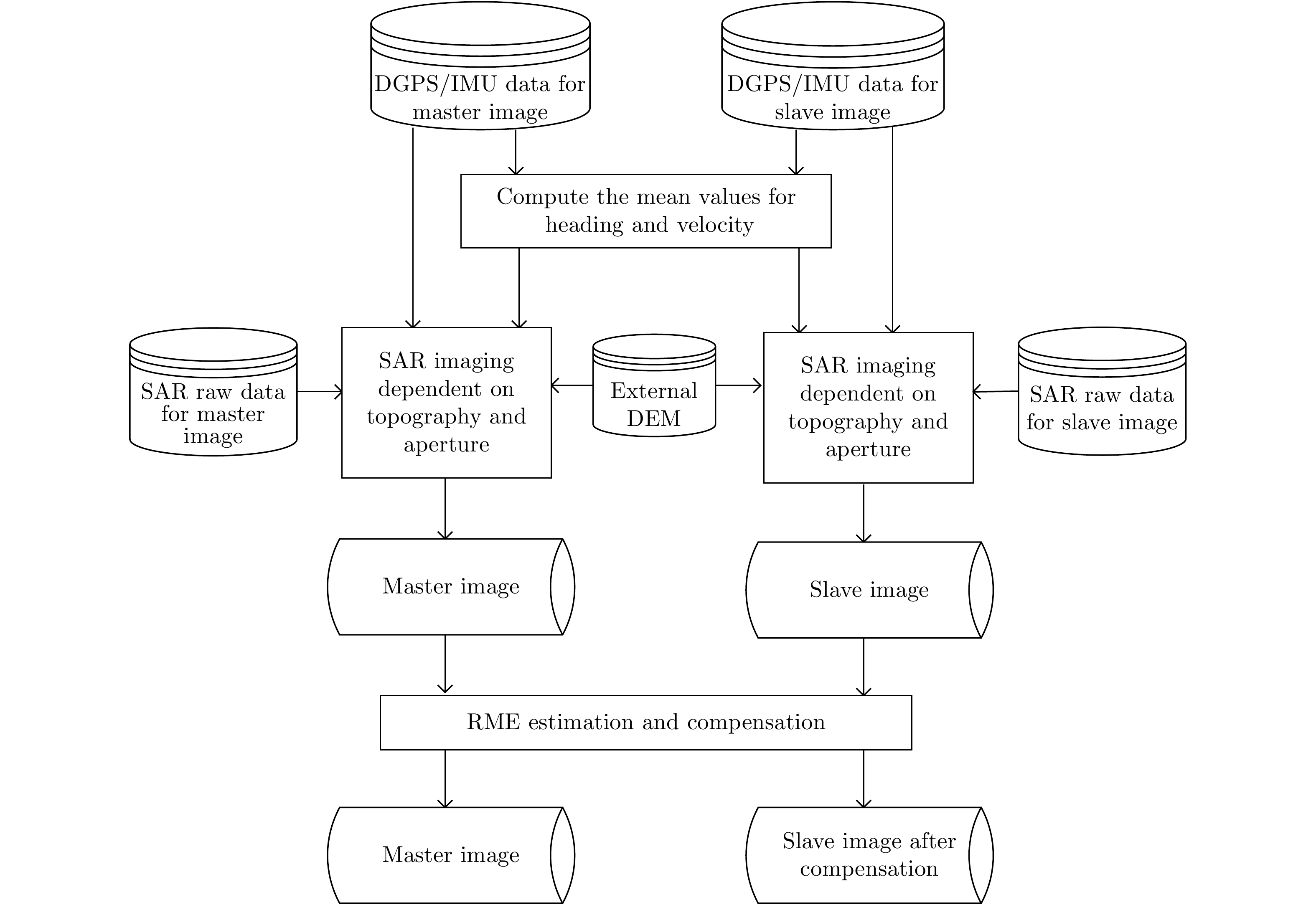
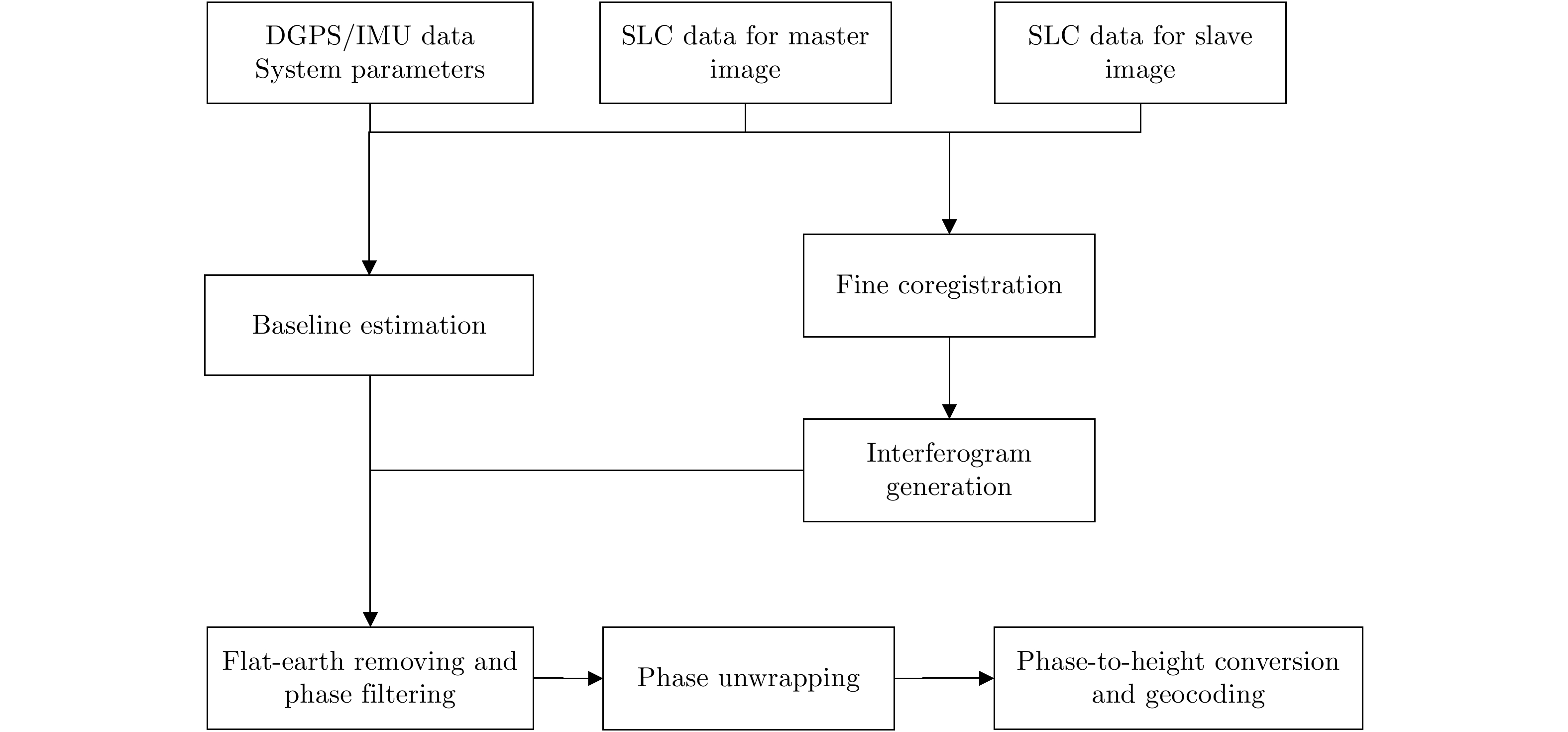
图 12 机载重轨干涉SAR成像处理流程
Figure 12. The imaging diagram for airborne repeat-pass interferometric SAR
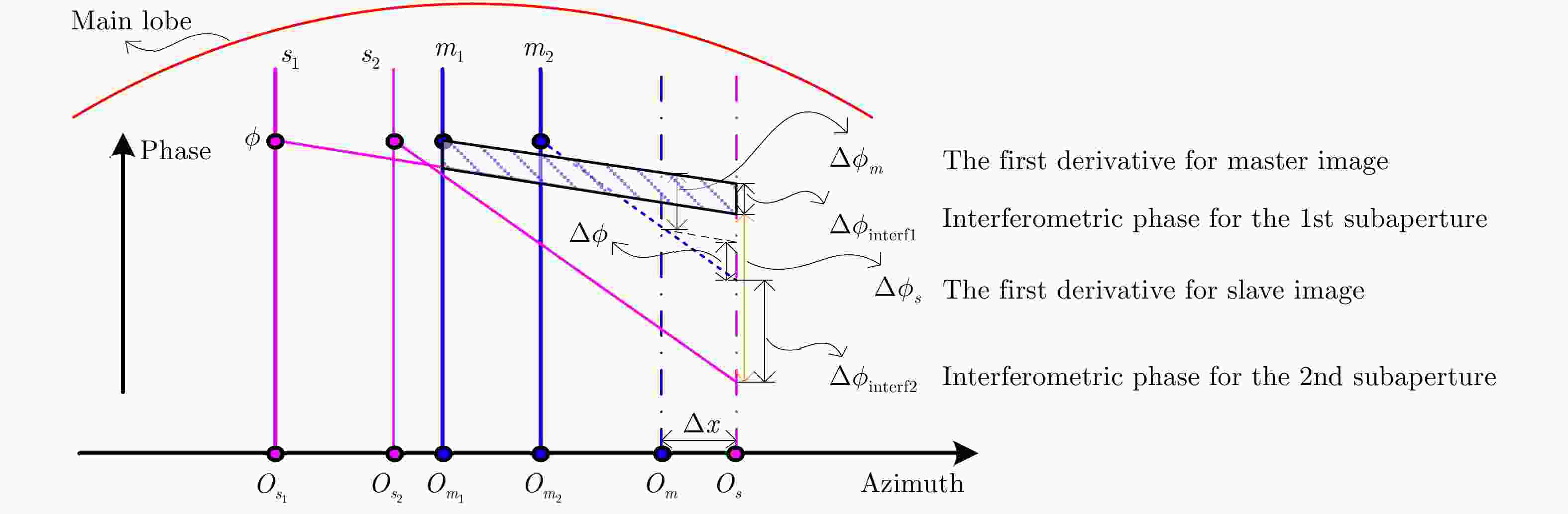
图 14 主、辅图像存在配准误差时,MS算法的原理示意图
Figure 14. The principle diagram of MS when coregistration error exists between the master and slave images
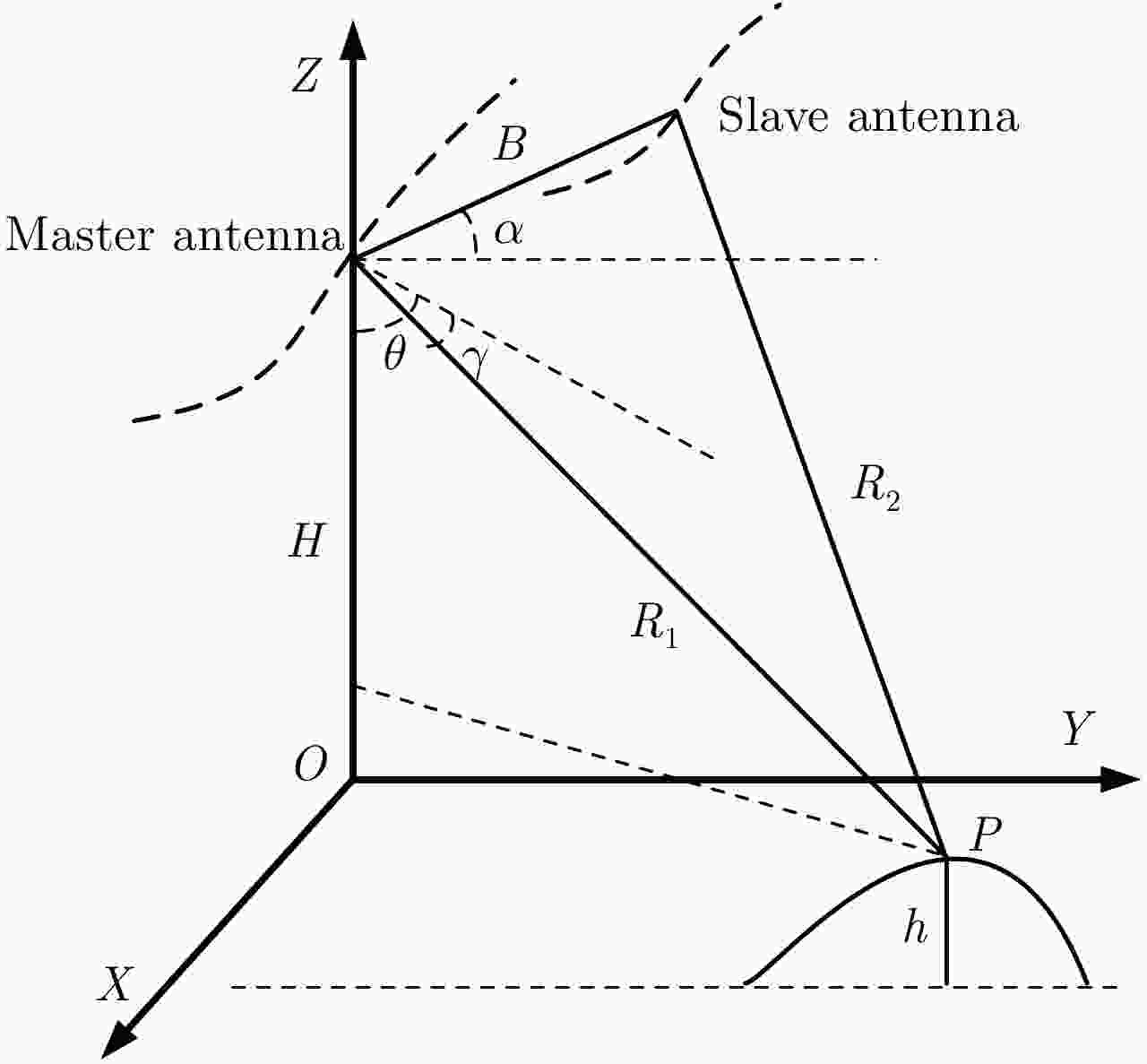
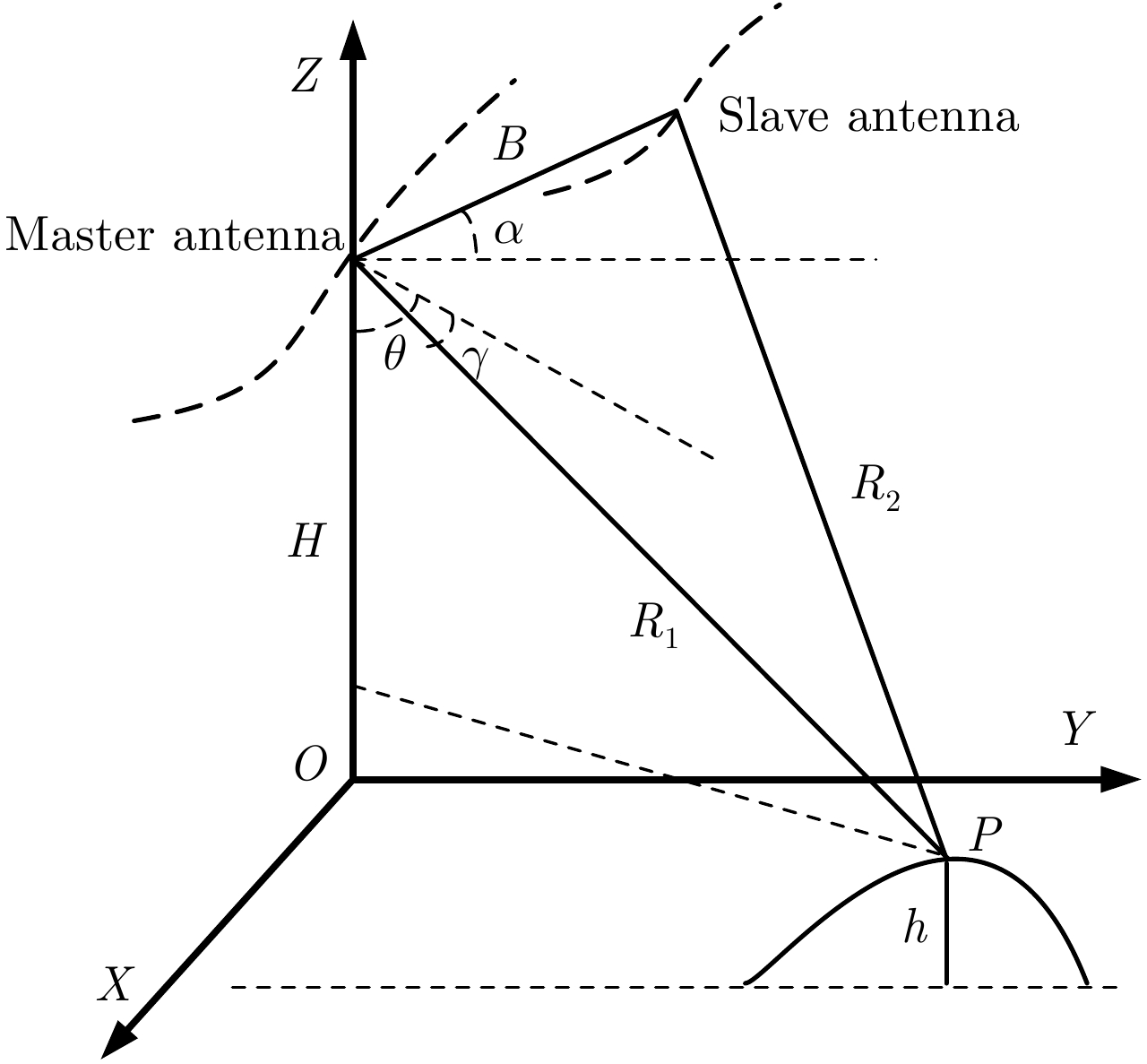
图 15 机载重轨干涉SAR观测几何模型
Figure 15. The observation geometry for airborne repeat-pass interferometric SAR
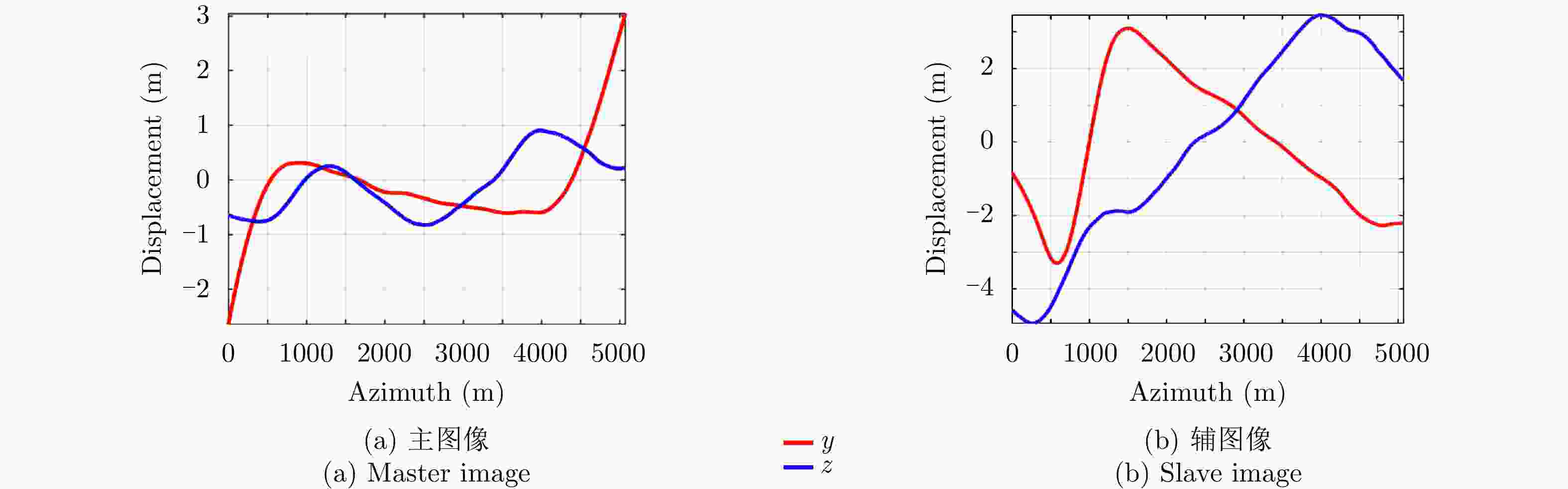
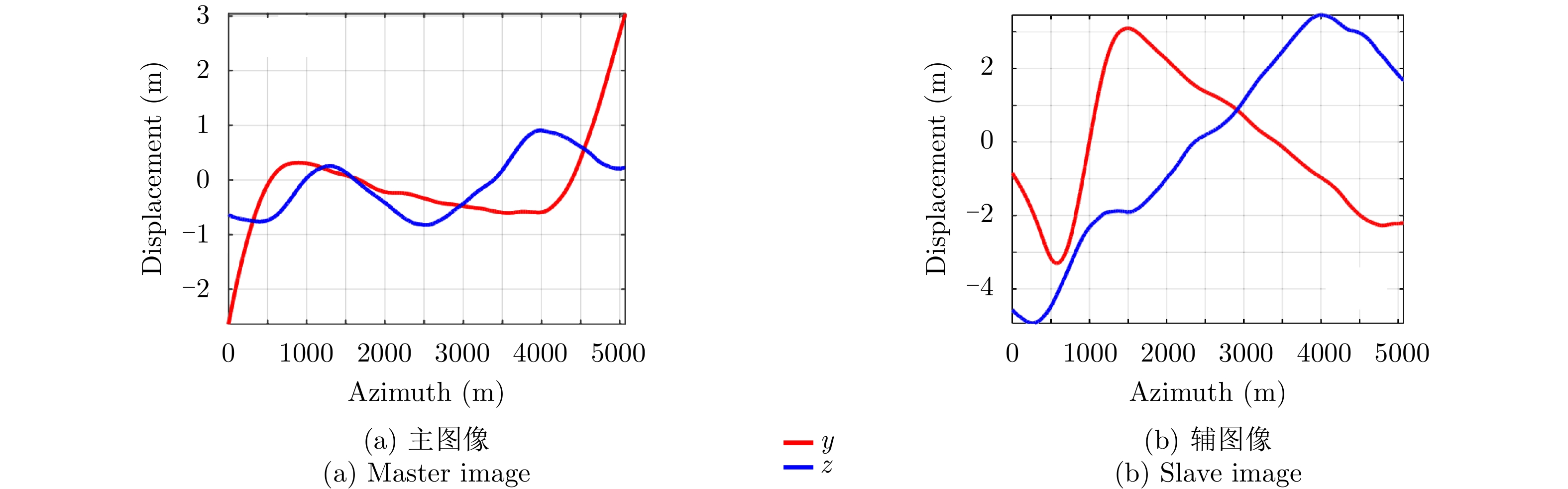
图 17 试验区1主、辅图像载机实际航迹与参考轨迹之间的偏移量
Figure 17. The displacement between the actual and referenced tracks for the first test area

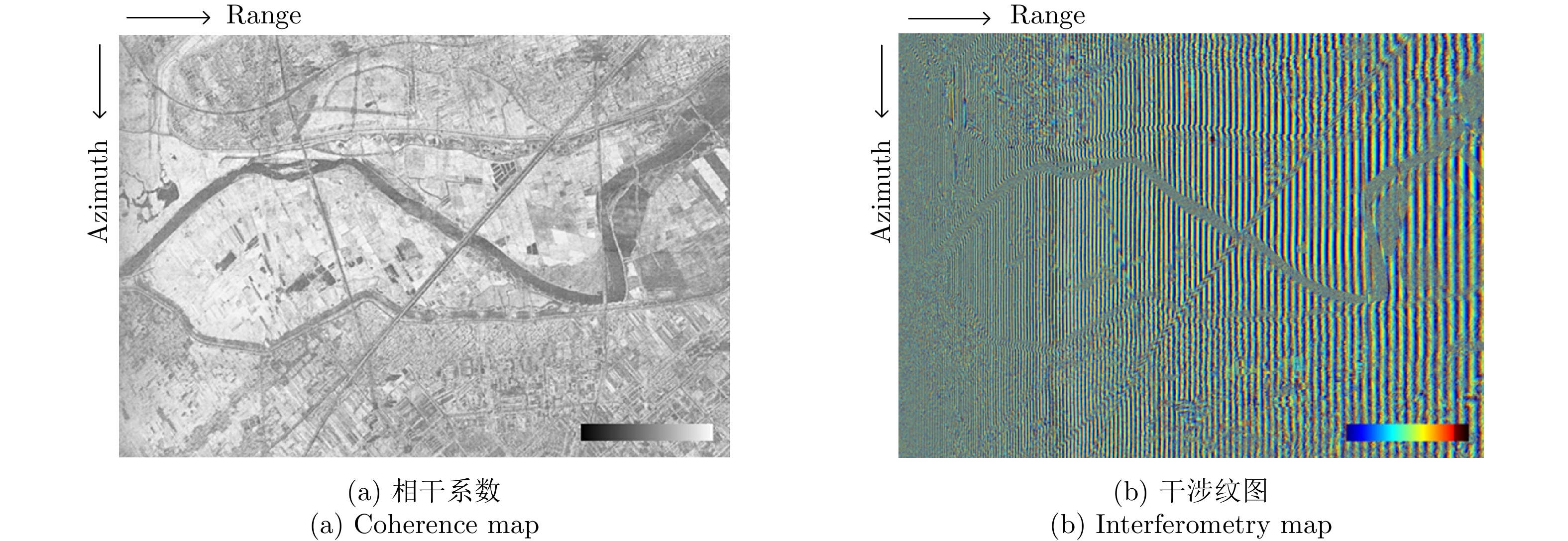
图 18 试验区1的相干系数及干涉纹图
Figure 18. The coherence and interferometry map for the first test area
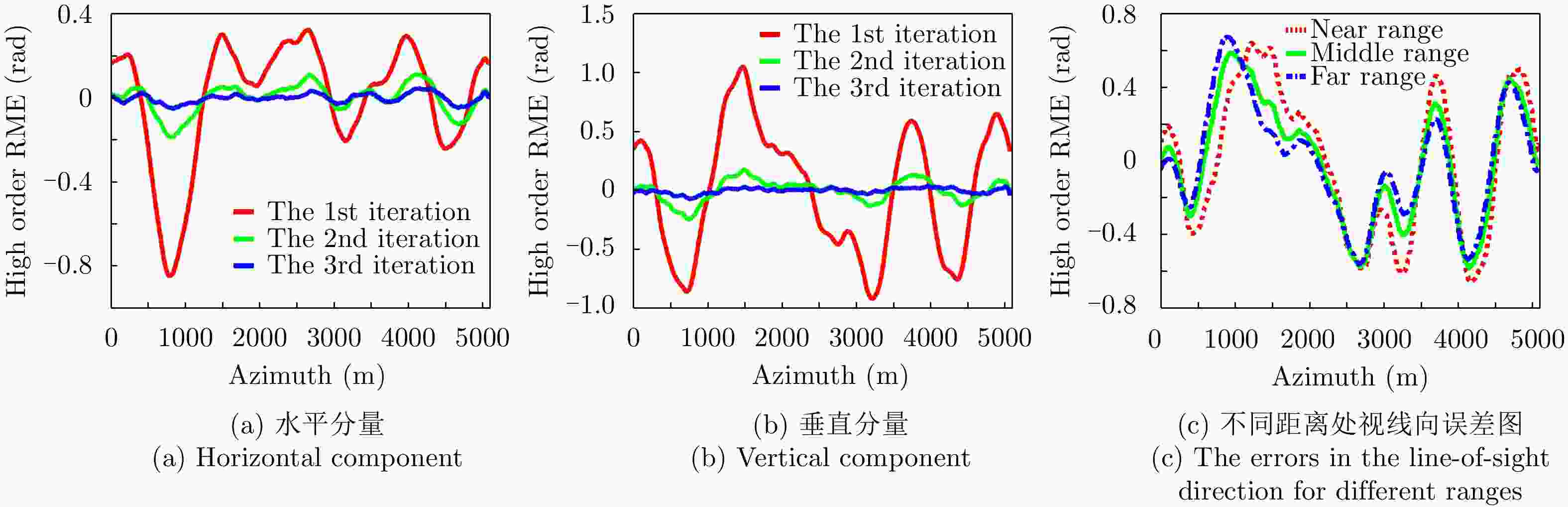
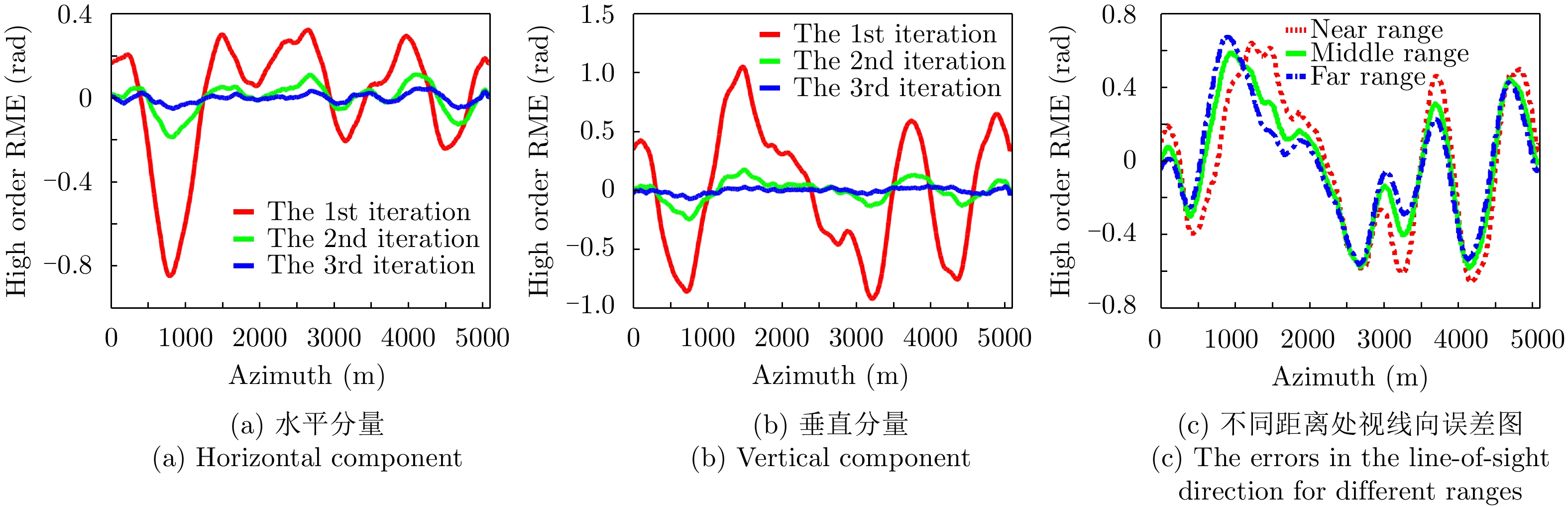
图 20 利用MS方法估计的主辅图像干涉条纹中的高阶残余运动误差
Figure 20. The high-order residual motion errors derived from the interferometric fringes with MS
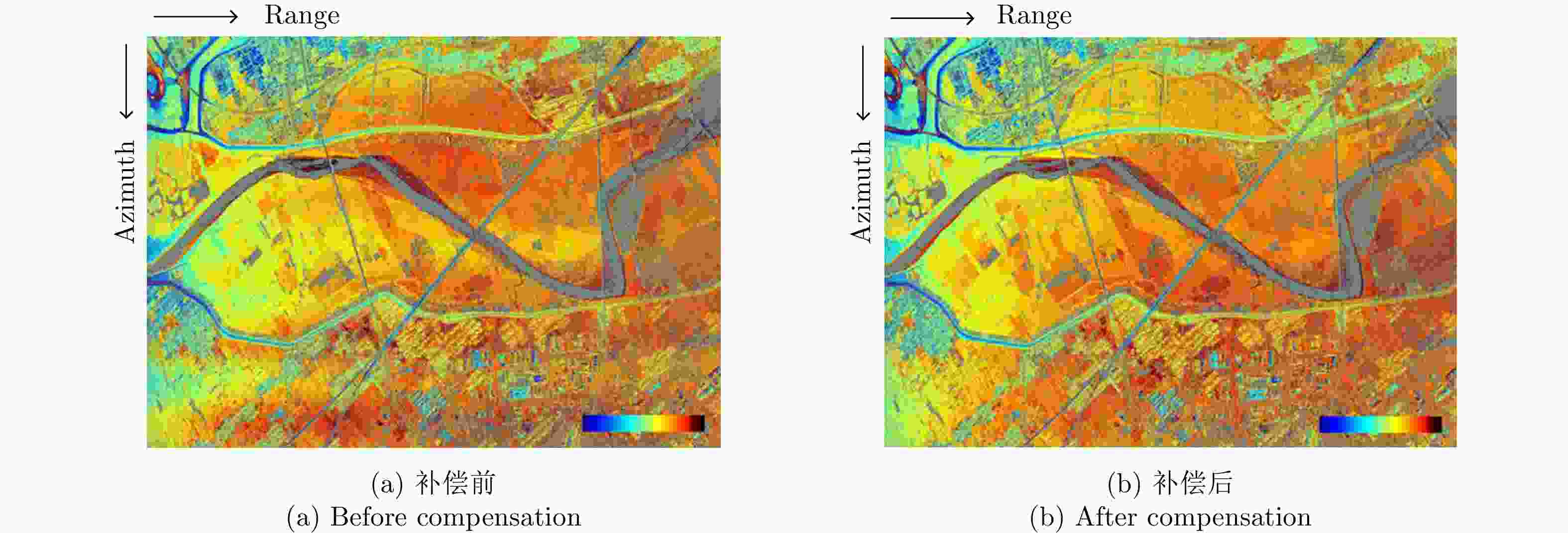
图 21 残余运动误差补偿前后的干涉纹图(去平地效应之后)
Figure 21. The interferometry map before and after RME compensation for the first test area (after flat-earth removing)
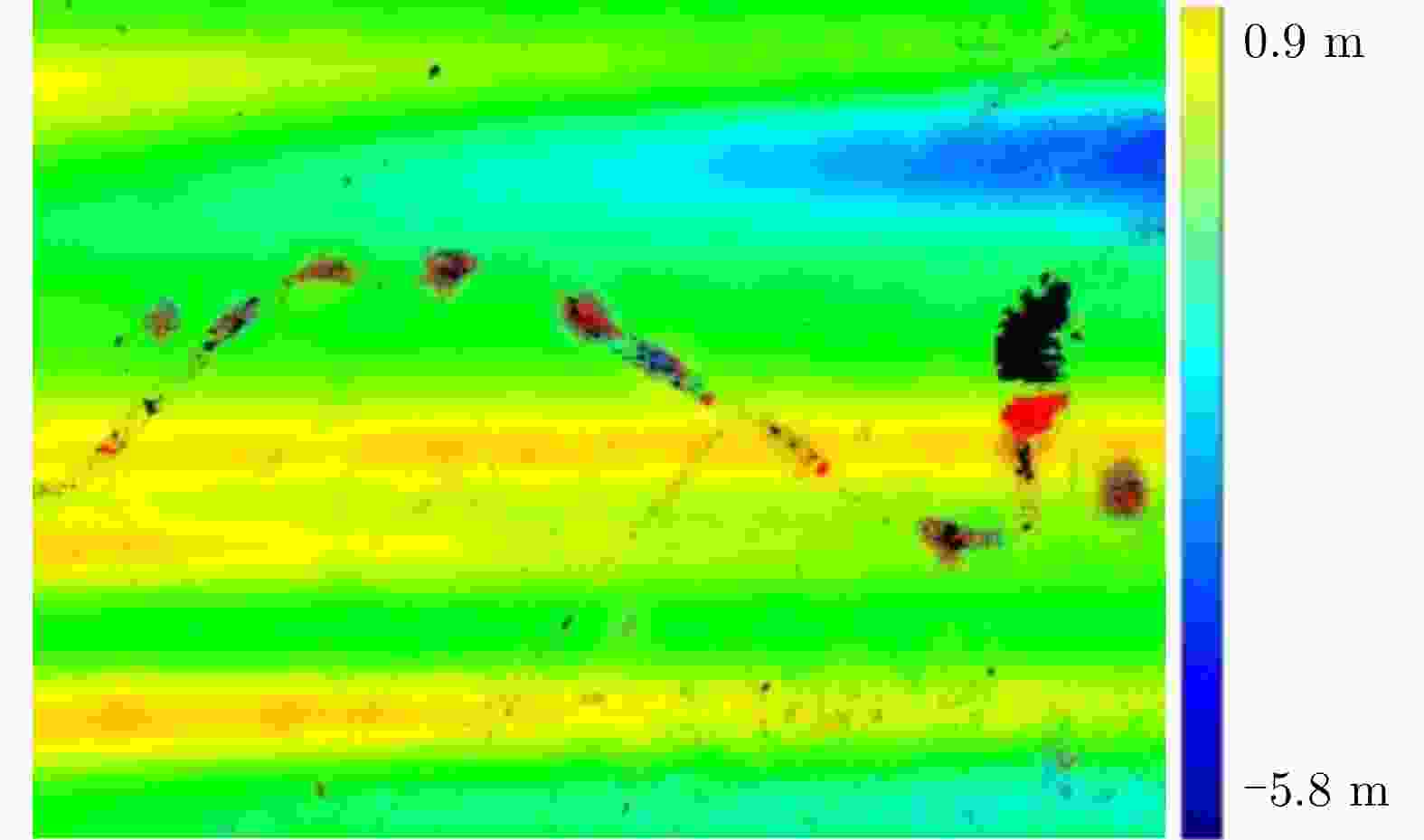
图 23 残余运动补偿前后高程的差异
Figure 23. The DEM difference map before and after RME compensation
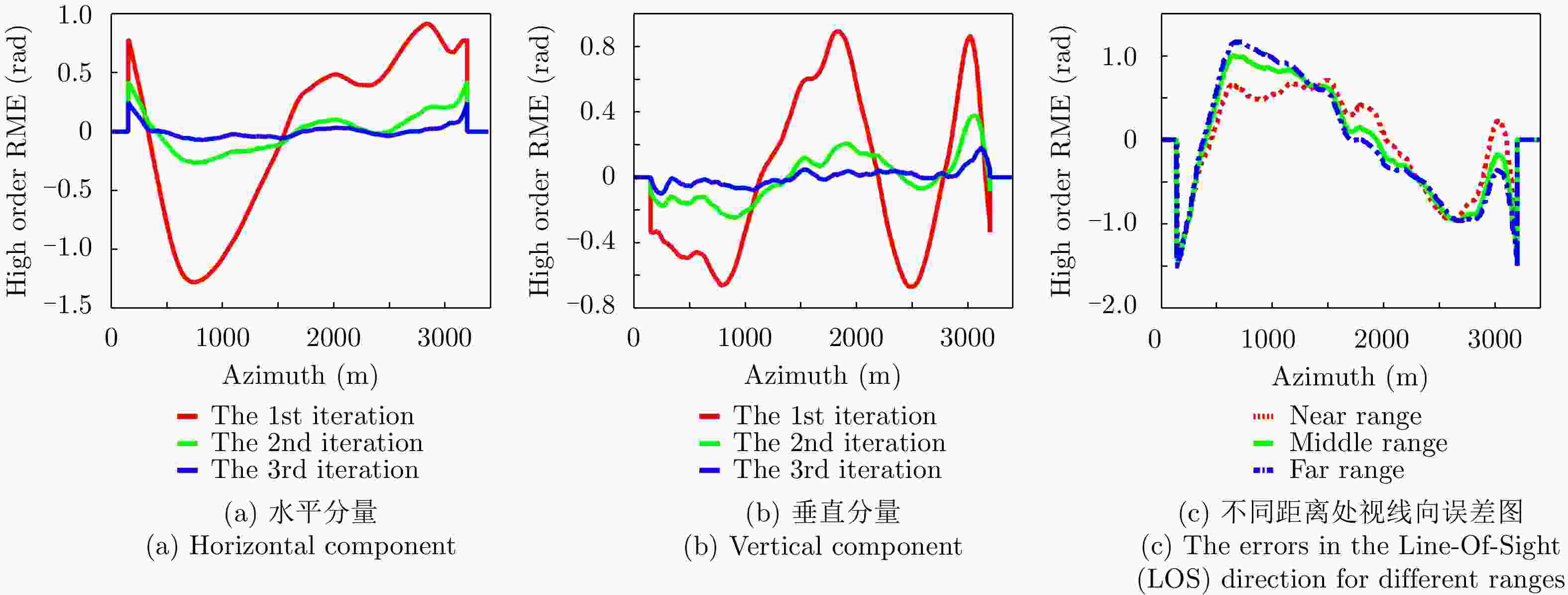
图 25 利用MS方法估计的主辅图像干涉条纹中的高阶残余运动误差
Figure 25. The high-order RME derived from the interferometric fringes with MS
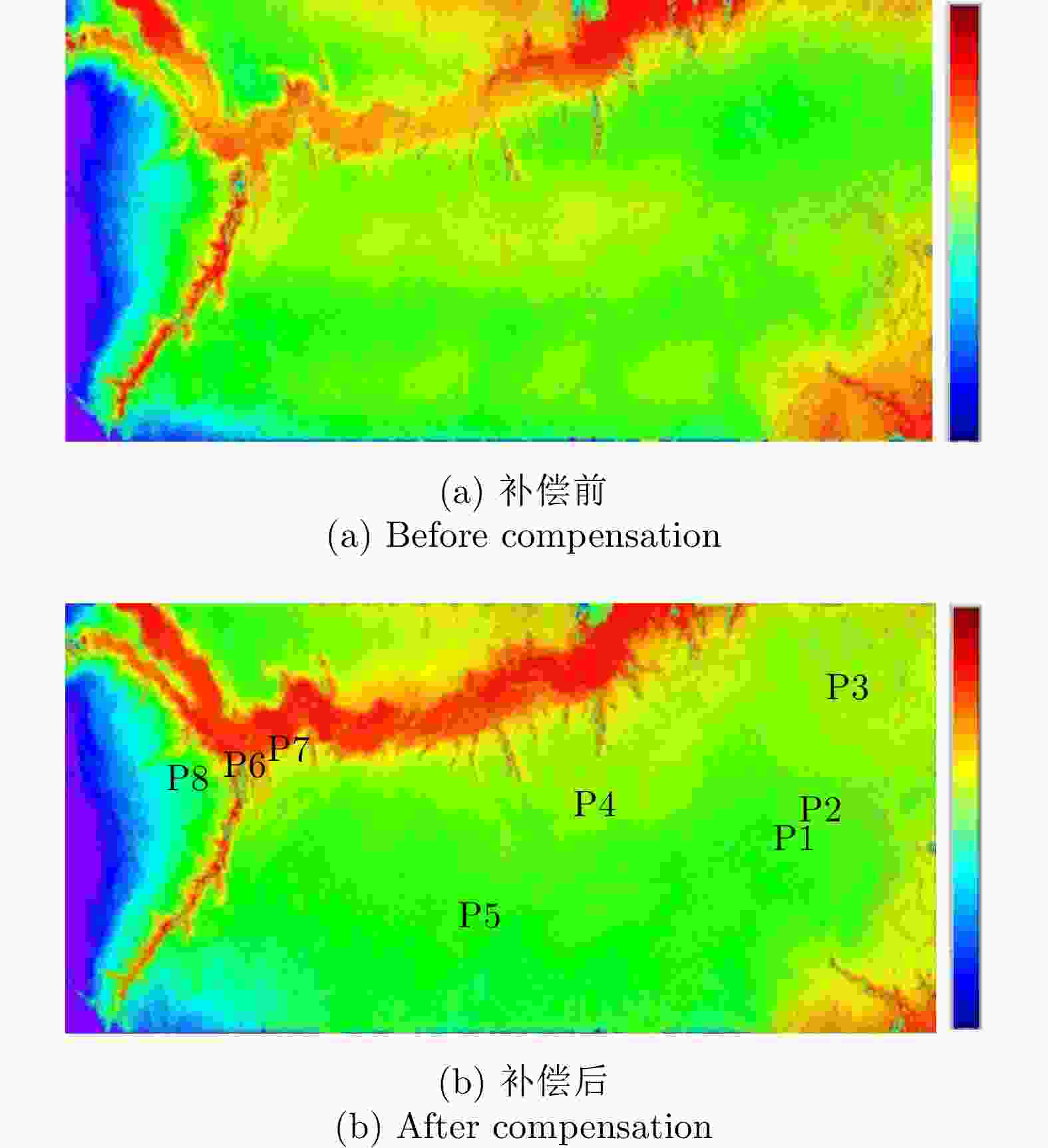
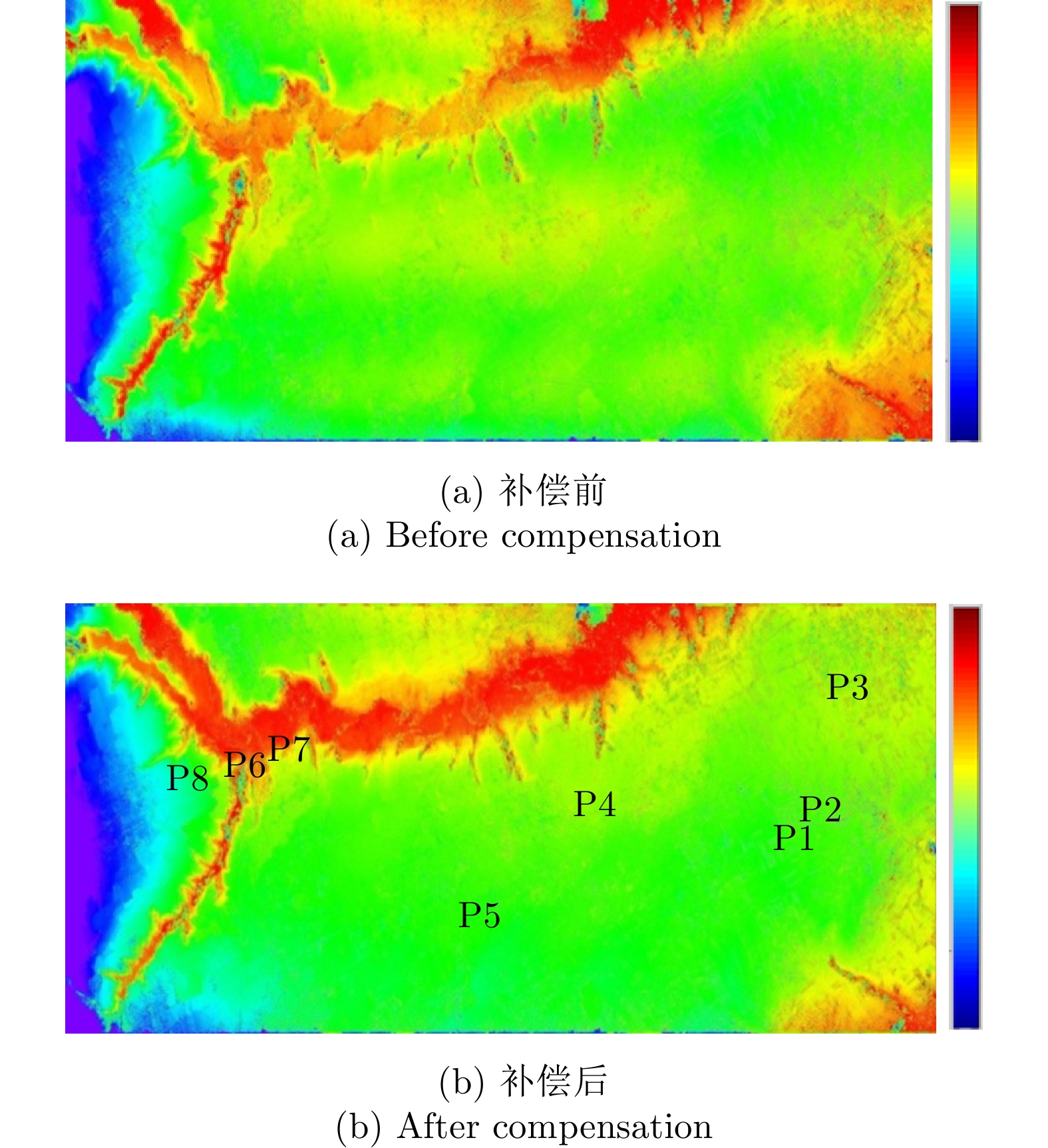
图 26 试验区2残余运动补偿前后的相位图(相位解缠后)
Figure 26. The interferometry map before and after RME compensation for the second test area (after phase unwrapping)
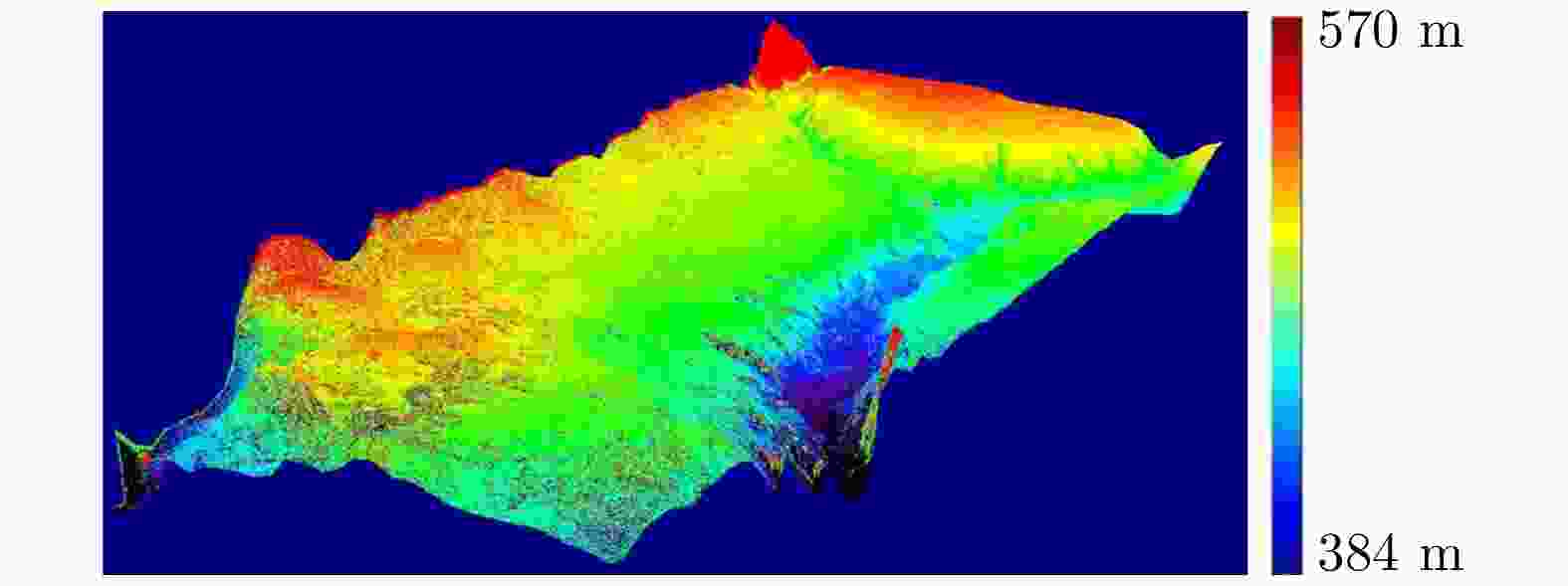
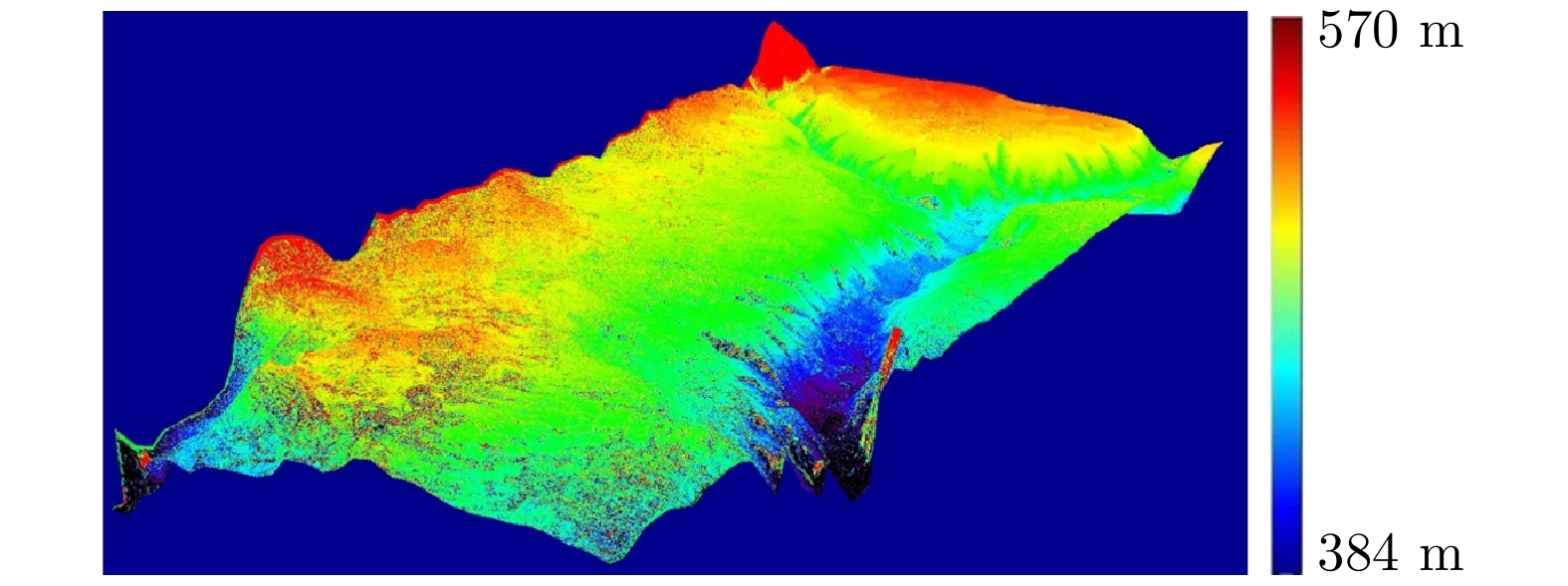
图 27 试验区2反演的DEM的3维显示图
Figure 27. 3-dimentinal display of the derived DEM for the second test area
表 1 组合惯导的精度
Table 1. Precisions of the DGPS/IMU navigation system
实时测量精度(1σ) 事后处理精度(1σ) 航向测量精度(°) 0.02 0.005 姿态测量精度(°) 0.005 0.002 定位测量精度(m) 3~5 0.02 (水平向),
0.05 (高度向)速度测量精度(m/s) 0.03 0.05  下载: 导出CSV
下载: 导出CSV
表 2 L波段SAR系统参数
Table 2. Parameters for L-band SAR system
系统参数 数值 波长 0.23 m 信号带宽 200 MHz 载机速度 ~108 m/s 载机高度 ~4600 m 天线长度(方位向,距离向) 1.35 m, 0.3 m 分辨率(方位向,距离向) 1 m, 1 m 采样间隔(方位向,距离向) ~0.6 m, 0.6 m 波束中心视角 50° 极化方式 全极化 雷达发射功率 1000 W 图像信噪比 30 dB 脉冲重复频率(PRF) 1400 Hz
下载: 导出CSV
表 3 试验区重轨数据的参数
Table 3. Parameters for the repeat-pass SAR data
参数 试验区1 试验区2 基线长(m) 28.1811 10.5500 基线角(rad) 1.99282 3.05920 场景大小(方位向km×斜距向km) 5.0×7.8 3.5×7.8 主/辅图像数据获取时间 12:22/11:55 12:33/12:20
下载: 导出CSV
表 4 试验区1干涉反演的DEM精度评价
Table 4. Evaluation of the derived DEM for the first test area
序号 位置(列,行) 测量值(m) 结果值(m) 误差(m) 1 (2808,2524) 311.0 316.27 –5.27 2 (6324,2380) 312.6 311.92 0.68 3 (7980,2900) 313.5 310.54 2.96 4 (4284,1420) 318.3 317.04 1.26 5 (5200,1092) 315.1 319.39 –4.29 6 (5696, 620) 316.2 314.64 1.56 标准方差 3.40 m
下载: 导出CSV
表 5 试验区2干涉反演的DEM精度评价
Table 5. Evaluation of the derived DEM for the second test area
序号 位置(列,行) 测量值(m) 结果值(m) 误差(m) 1 (10334, 3012) 543.0 544.44 1.44 2 (10392, 2930) 542.0 536.88 –5.12 3 (10398, 1276) 540.4 543.95 3.55 4 (7306, 2620) 509.8 508.65 –1.14 5 (5746, 3970) 515.2 512.98 –2.22 6 (2526, 2276) 463.3 465.24 1.94 7 (2558, 2274) 471.9 468.91 –2.99 8 (1768, 2368) 528.7 528.29 –0.41 标准方差 2.85 m
下载: 导出CSV
-
[1] REIGBER A, MERCER B, PRATS P, et al. Spectral diversity methods applied to DEM generation from repeat-pass P-band InSAR[C]. 2006 European Conference on Synthetic Aperture Radar, Dresden, Germany, 2006. [2] PINHEIRO M, REIGBER A, SCHEIBER R, et al. Generation of highly accurate DEMs over flat areas by means of dual-frequency and dual-baseline airborne SAR interferometry[J]. IEEE Transactions on Geoscience and Remote Sensing, 2018, 56(8): 4361–4390. doi: 10.1109/TGRS.2018.2817122 [3] PRATS P, SCHEIBER R, REIGBER A, et al. Estimation of the surface velocity field of the Aletsch glacier using multibaseline airborne SAR interferometry[J]. IEEE Transactions on Geoscience and Remote Sensing, 2009, 47(2): 419–430. doi: 10.1109/tgrs.2008.2004277 [4] REIGBER A, SCHEIBER R, JÄGER M, et al. Very-high-resolution airborne synthetic aperture radar imaging: Signal processing and applications[J]. Proceedings of the IEEE, 2013, 101(3): 759–783. doi: 10.1109/JPROC.2012.2220511 [5] DE MACEDO K A C, SCHEIBER R, and MOREIRA A. First evaluations of airborne InSAR time-series[C]. 2006 European Conference on Synthetic Aperture Radar, Dresden, Germany, 2006. [6] PRATS P, SCHEIBER R, MOREIRA A, et al. Advanced D-InSAR techniques applied to a time series of airborne SAR data[C]. 2007 IEEE International Geoscience and Remote Sensing Symposium, Barcelona, Spain, 2007: 4874–4877. doi: 10.1109/IGARSS.2007.4423953. [7] PRATS P, REIGBER A, MALLORQUI J J, et al. Estimation of the temporal evolution of the deformation using airborne differential SAR interferometry[J]. IEEE Transactions on Geoscience and Remote Sensing, 2008, 46(4): 1065–1078. doi: 10.1109/TGRS.2008.915758 [8] BRANCATO V, JÄGER M, SCHEIBER R, et al. A motion compensation strategy for airborne repeat-pass SAR data[J]. IEEE Geoscience and Remote Sensing Letters, 2018, 15(10): 1580–1584. doi: 10.1109/LGRS.2018.2848596 [9] ROSEN P A, HENSLEY S, WHEELER K, et al. UAVSAR: A new NASA airborne SAR system for science and technology research[C]. 2006 IEEE Conference on Radar, Verona, USA, 2006: 22–29. doi: 10.1109/RADAR.2006.1631770. [10] MADSEN S N, HENSLEY S, WHEELER K, et al. UAV-based L-band SAR with precision flight path control[C]. SPIE 5659, Enabling Sensor and Platform Technologies for Spaceborne Remote Sensing, Honolulu, USA, 2005: 51–60. doi: 10.1117/12.578373. [11] HENSLEY S, ZEBKER H, JONES C, et al. First deformation results using the NASA/JPL UAVSAR instrument[C]. The 2nd Annual-Pacific Conference on Synthetic Aperture Radar, Xi’an, China, 2009: 1051–1055. doi: 10.1109/APSAR.2009.5374246. [12] HENSLEY S, ZEBKER H, JONES C, et al. Use of airborne SAR interferometry for monitoring deformation of large-scale man-made features[C]. International Workshop Spatial Information Technologies, Hong Kong, China, 2010. [13] HENSLEY S, JONES C, MOLLER D, et al. Ice studies using UAVSAR L-band and Ka-band data[C]. The 8th European Conference on Synthetic Aperture Radar, Aachen, Germany, 2010. [14] FORNARO G, LANARI R, SANSOSTI E, et al. Airborne differential interferometry: X-band experiments[C]. 2004 International Geoscience and Remote Sensing Symposium, Anchorage, USA, 2004: 3329–3332. doi: 10.1109/IGARSS.2004.1370416. [15] Perna S, Wimmer C, Moreira J, et al. X-band airborne differential interferometry: Results of the OrbiSAR campaign over the Perugia area[J]. IEEE Transactions on Geoscience and Remote Sensing, 2008, 46(2): 489–503. doi: 10.1109/TGRS.2007.908871 [16] DE MACEDO K A C, WIMMER C, BARRETO T L M, et al. Long-term airborne DInSAR measurements at X- and P-bands: A case study on the application of surveying geohazard threats to pipelines[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2012, 5(3): 990–1005. doi: 10.1109/jstars.2012.2187275 [17] 钟雪莲, 向茂生, 郭华东, 等. 机载重轨干涉合成孔径雷达的发展[J]. 雷达学报, 2013, 2(3): 367–381. doi: 10.3724/SP.J.1300.2013.13005ZHONG Xuelian, XIANG Maosheng, GUO Huadong, et al. Current development in airborne repeat-pass interferometric synthetic aperture radar[J]. Journal of Radars, 2013, 2(3): 367–381. doi: 10.3724/SP.J.1300.2013.13005 [18] LIN Jianhe, LV Xiaolei, and LI Rui. Automatic registered back-projection approach based on object orientation for airborne repeat-track interferometric SAR[J]. IET Radar, Sonar & Navigation, 2018, 12(9): 1066–1076. doi: 10.1049/iet-rsn.2018.5053 [19] CAO Ning, LEE H, ZAUGG E, et al. Estimation of residual motion errors in airborne SAR interferometry based on time-domain backprojection and multisquint techniques[J]. IEEE Transactions on Geoscience and Remote Sensing, 2018, 56(4): 2397–2407. doi: 10.1109/TGRS.2017.2779852 [20] 钟雪莲. 机载重轨干涉SAR残余运动估计方法研究[D]. [博士论文], 中国科学院大学, 2011: 111–140.ZHONG Xuelian. Residual motion estimation for airborne repeat-pass interferometric SAR[D]. [Ph.D. dissertation], University of Chinese Academy of Sciences, 2011: 111–140. [21] MOREIRA A and HUANG Y H. Airborne SAR processing of highly squinted data using a chirp scaling approach with integrated motion compensation[J]. IEEE Transactions on Geoscience and Remote Sensing, 1994, 32(5): 1029–1040. doi: 10.1109/36.312891 [22] MOREIRA A, MITTERMAYER J, and SCHEIBER R. Extended chirp scaling algorithm for air-and spaceborne SAR data processing in stripmap and ScanSAR imaging modes[J]. IEEE Transactions on Geoscience and Remote Sensing, 1996, 34(5): 1123–1136. doi: 10.1109/36.536528 [23] REIGBER A, ALIVIZATOS E, POTSIS A, et al. Extended wavenumber-domain synthetic aperture radar focusing with integrated motion compensation[J]. IEE Proceedings- Radar, Sonar and Navigation, 2006, 153(3): 301–310. doi: 10.1049/ip-rsn:20045087 [24] CANTALLOUBE H and DUBOIS-FERNANDEZ P. Airborne X-band SAR imaging with 10 cm resolution: Technical challenge and preliminary results[J]. IEE Proceedings- Radar, Sonar and Navigation, 2006, 153(2): 163–176. doi: 10.1049/ip-rsn:20045097 [25] DE MACEDO K A C, SCHEIBER R, and MOREIRA A. An autofocus approach for residual motion errors with application to airborne repeat-pass SAR interferometry[J]. IEEE Transactions on Geoscience and Remote Sensing, 2008, 46(10): 3151–3162. doi: 10.1109/tgrs.2008.924004 [26] ZHONG Xuelian, XIANG Maosheng, YUE Huanyin, et al. Algorithm on the estimation of residual motion errors in airborne SAR images[J]. IEEE Transactions on Geoscience and Remote Sensing, 2014, 52(2): 1311–1323. doi: 10.1109/tgrs.2013.2249665 [27] ZHONG Xuelian, GUO Huadong, XIANG Maosheng, et al. Residual motion estimation with point targets and its application to airborne repeat-pass SAR interferometry[J]. International Journal of Remote Sensing, 2012, 33(3): 762–780. doi: 10.1080/01431161.2011.577838 [28] PRATS P, REIGBER A, and MALLORQUI J J. Interpolation-free coregistration and phase-correction of airborne SAR interferograms[J]. IEEE Geoscience and Remote Sensing Letters, 2004, 1(3): 188–191. doi: 10.1109/lgrs.2004.828181 [29] REIGBER A, PRATS P, and MALLORQUI J J. Refined estimation of time-varying baseline errors in airborne SAR interferometry[J]. IEEE Geoscience and Remote Sensing Letters, 2006, 3(1): 145–149. doi: 10.1109/lgrs.2005.860482 [30] FORNARO G, SANSOSTI E, LANARI R, et al. Role of processing geometry in SAR raw data focusing[J]. IEEE Transactions on Aerospace and Electronic Systems, 2002, 38(2): 441–454. doi: 10.1109/TAES.2002.1008978 [31] KOBAYASHI T, UMEHARA T, UEMOTO J, et al. Evaluation of digital elevation model generated by an airborne interferometric SAR (Pi-SAR2)[C]. 2014 IEEE Geoscience and Remote Sensing Symposium, Quebec City, Canada, 2014: 378–381. doi: 10.1109/IGARSS.2014.6946437. [32] FANG Dongsheng, LV Xiaolei, YUN Ye, et al. An InSAR fine registration algorithm using uniform tie points based on Voronoi diagram[J]. IEEE Geoscience and Remote Sensing Letters, 2017, 14(8): 1403–1407. doi: 10.1109/LGRS.2017.2715189 -












计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

