
 Submit Manuscript
Submit Manuscript Peer Review
Peer Review Editor Work
Editor Work- Home
- Articles & Issues
-
Data
- Dataset of Radar Detecting Sea
- SAR Dataset
- SARGroundObjectsTypes
- SARMV3D
- AIRSAT Constellation SAR Land Cover Classification Dataset
- 3DRIED
- UWB-HA4D
- LLS-LFMCWR
- FAIR-CSAR
- MSAR
- SDD-SAR
- FUSAR
- SpaceborneSAR3Dimaging
- Sea-land Segmentation
- SAR Multi-domain Ship Detection Dataset
- SAR-Airport
- Hilly and mountainous farmland time-series SAR and ground quadrat dataset
- SAR images for interference detection and suppression
- HP-SAR Evaluation & Analytical Dataset
- GDHuiYan-ATRNet
- Multi-System Maritime Low Observable Target Dataset
- DatasetinthePaper
- DatasetintheCompetition
- Report
- Course
- About
- Publish
- Editorial Board
- Chinese

| Citation: | YUAN Yubing, YE Shengbo, JI Yicai, et al. Fast refocusing algorithm based on three-dimensional wall compensation[J]. Journal of Radars, 2024, 13(4): 822–837. doi: 10.12000/JR24051

|
Fast Refocusing Algorithm Based on Three-dimensional Wall Compensation
DOI: 10.12000/JR24051 CSTR: 32380.14.JR24051
More Information-
Abstract
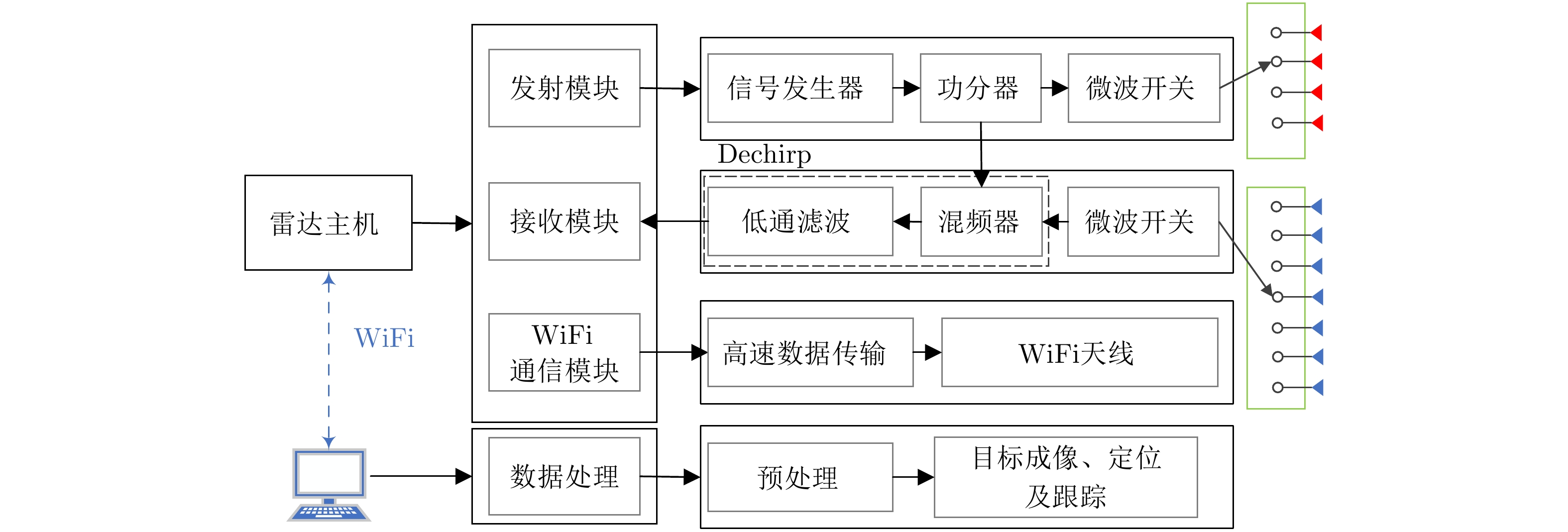
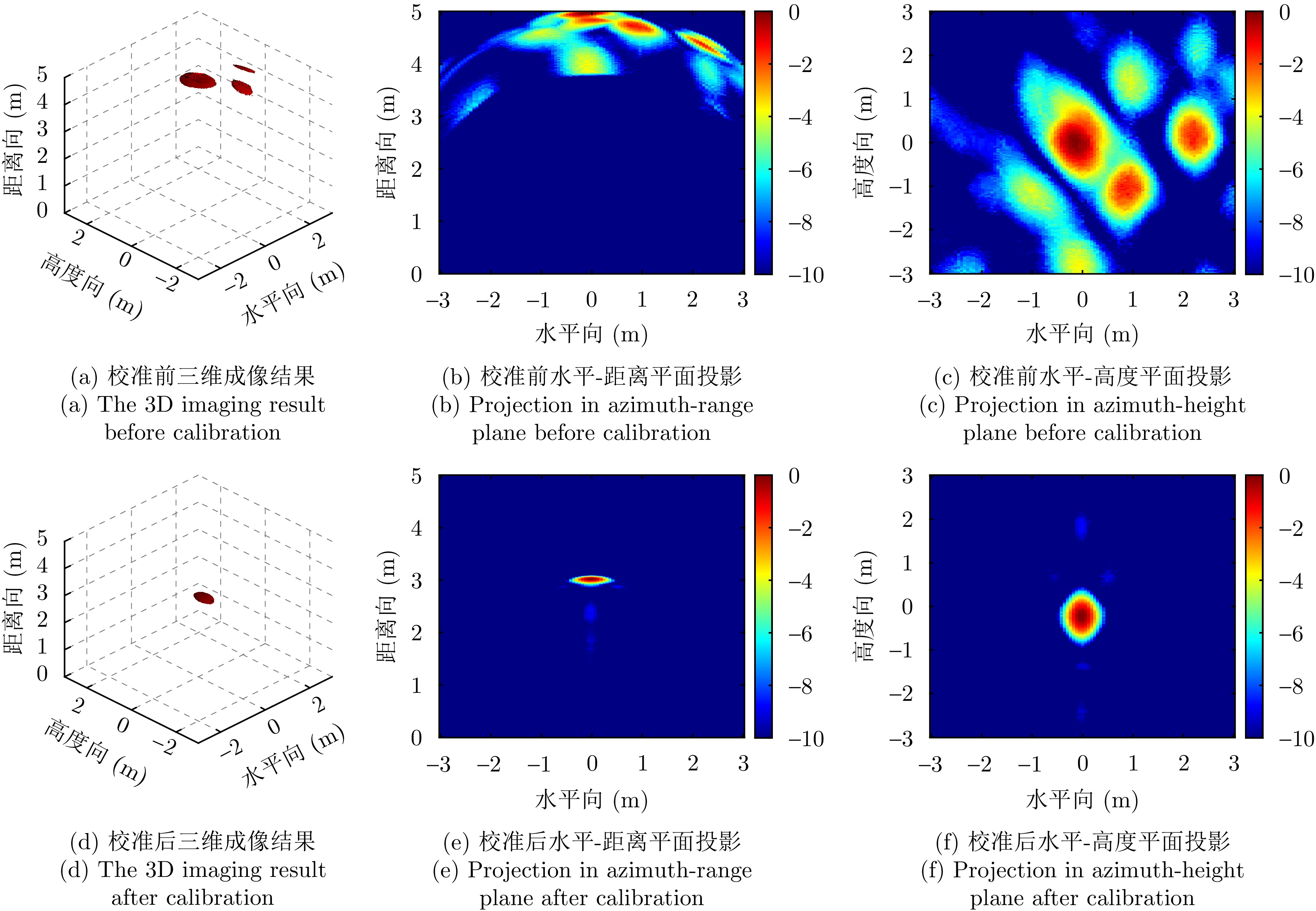
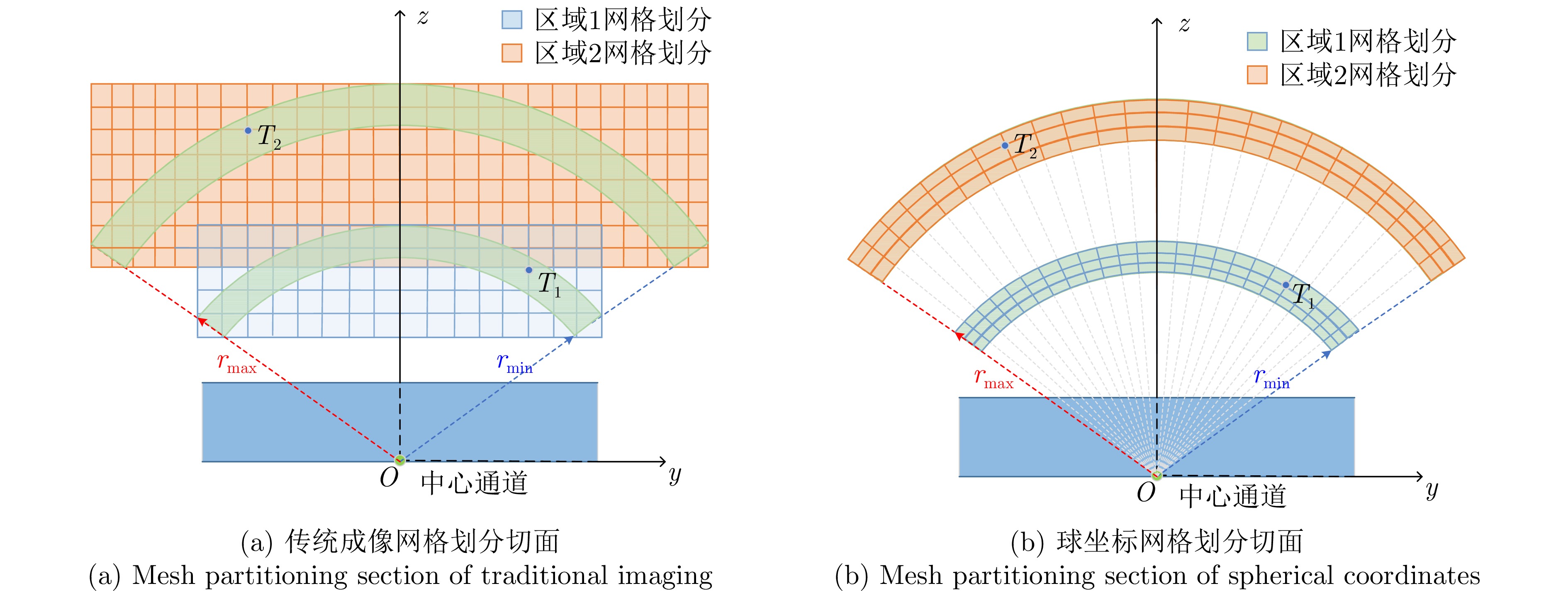
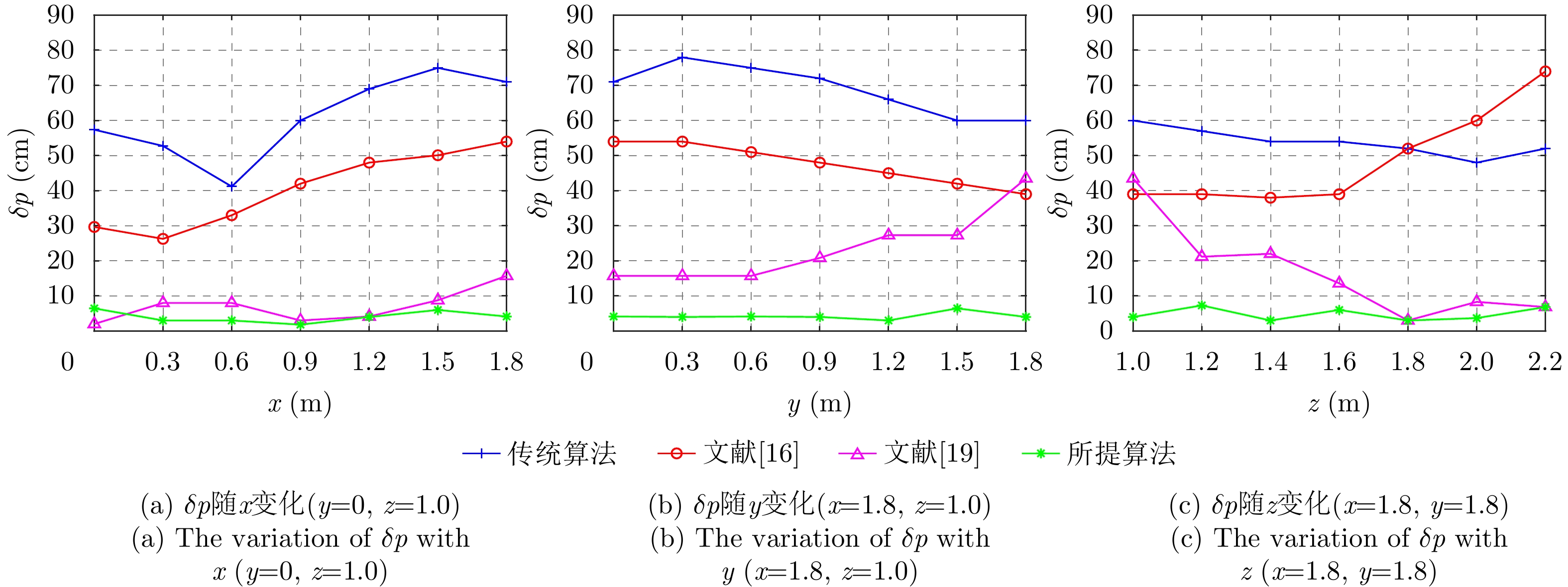
Ultra-wideband through-wall radar, leveraging its ability to penetrate walls, can be used together with Multiple-Input Multiple-Output (MIMO) technology to image hidden targets behind walls. This approach provides rich information for detecting and locating people within buildings. This paper introduces a closed-loop interferometric calibration method based on a multitransmitter multireceiver ultrawideband wall-penetrating radar system in the Frequency Modulated Continuous Wave (FMCW) regime. This method aims to correct scattering issues caused by internal system errors. The presence of walls causes the target imaging position to deviate from the real position. To address this, this paper derives a three-Dimensional (3D) wall compensation algorithm jointing channels and pixel points. Then, a fast refocusing algorithm is proposed based on the geometric properties of the imaging area. The first step involves removing the influence of walls on delay time and determining the presence of the target. Subsequently, in view of the geometric properties of the region, a spherical coordinate grid division adapted to the region shape is selected. Localized refocusing is then performed in the subregion. This avoids the issue of electromagnetic wave attenuation, causing strong targets to mask weak ones in the imaging results. At the same time, the adoption of spherical coordinates for gridding and localized imaging greatly reduces the overall time consumption by the algorithm. Through simulation analysis and experimental verification, the proposed calibration method can effectively compensate for system errors. The fast refocusing algorithm can be used to realize multitarget 3D localization of the human body behind walls, with the localization accuracy of each dimension surpassing 10 cm and computational speeds improving by five times compared with those of existing algorithms. In terms of target detection probability, the proposed algorithm consistently identifies weak targets that other algorithms may overlook. -

-
References
[1] MAITI S and BHATTACHARYA A. Microwave detection of respiration rate of a living human hidden behind an inhomogeneous optically opaque medium[J]. IEEE Sensors Journal, 2021, 21(5): 6133–6144. doi: 10.1109/JSEN.2020.3043846.[2] YE Shengbo, ZHOU Bin, and FANG Guangyou. Design of a novel ultrawideband digital receiver for pulse ground-penetrating radar[J]. IEEE Geoscience and Remote Sensing Letters, 2011, 8(4): 656–660. doi: 10.1109/LGRS.2010.2098844.[3] FANG Guangyou. The research activities of Ultrawide-band (UWB) radar in China[C]. IEEE International Conference on Ultra-Wideband, Singapore, Singapore, 2007: 43–45. doi: 10.1109/ICUWB.2007.4380912.[4] QU Xiaodong, GAO Weicheng, MENG Haoyu, et al. Indoor human behavior recognition method based on wavelet scattering network and conditional random field model[J]. IEEE Transactions on Geoscience and Remote Sensing, 2023, 61: 5104815. doi: 10.1109/TGRS.2023.3276023.[5] 金添, 宋勇平, 崔国龙, 等. 低频电磁波建筑物内部结构透视技术研究进展[J]. 雷达学报, 2021, 10(3): 342–359. doi: 10.12000/JR20119.JIN Tian, SONG Yongping, CUI Guolong, et al. Advances on penetrating imaging of building layout technique using low frequency radio waves[J]. Journal of Radars, 2021, 10(3): 342–359. doi: 10.12000/JR20119.[6] QIU Lei, JIN Tian, LU Biying, et al. An isophase-based life signal extraction in through-the-wall radar[J]. IEEE Geoscience and Remote Sensing Letters, 2017, 14(2): 193–197. doi: 10.1109/LGRS.2016.2633622.[7] 金添, 宋勇平. 超宽带雷达建筑物结构稀疏成像[J]. 雷达学报, 2018, 7(3): 275–284. doi: 10.12000/JR18031.JIN Tian and SONG Yongping. Sparse imaging of building layouts in ultra-wideband radar[J]. Journal of Radars, 2018, 7(3): 275–284. doi: 10.12000/JR18031.[8] YUAN Yubing, JI Yicai, YE Shengbo, et al. A clutter identification and removal method based on long delay lines and cross-correlation in through-wall detection[J]. Applied Sciences, 2024, 14(3): 1299. doi: 10.3390/app14031299.[9] MOHAMMED I, COLLINGS I B, and HANLY S V. Multiple target localization through-the-wall using non-coherent Bi-static radar[C]. 2019 13th International Conference on Signal Processing and Communication Systems, Gold Coast, Australia, 2019: 1–8. doi: 10.1109/ICSPCS47537.2019.9008415.[10] 刘新, 阎焜, 杨光耀, 等. UWB-MIMO穿墙雷达三维成像与运动补偿算法研究[J]. 电子与信息学报, 2020, 42(9): 2253–2260. doi: 10.11999/JEIT190356.LIU Xin, YAN Kun, YANG Guangyao, et al. Study on 3D imaging and motion compensation algorithm for UWB-MIMO through-wall radar[J]. Journal of Electronics & Information Technology, 2020, 42(9): 2253–2260. doi: 10.11999/JEIT190356.[11] LIN Bo, LI Chao, JI Yicai, et al. Efficient scaling techniques for 2-D sparse MIMO array far-field imaging[J]. IEEE Sensors Journal, 2024, 24(8): 12604–12615. doi: 10.1109/JSEN.2024.3354246.[12] AFTANAS M, ROVNAKOVA J, DRUTAROVSKY M, et al. Efficient method of TOA estimation for through wall imaging by UWB radar[C]. 2008 IEEE International Conference on Ultra-Wideband, Hannover, Germany, 2008: 101–104. doi: 10.1109/ICUWB.2008.4653361.[13] AHMAD F, AMIN M G, and KASSAM S A. Synthetic aperture beamformer for imaging through a dielectric wall[J]. IEEE Transactions on Aerospace and Electronic Systems, 2005, 41(1): 271–283. doi: 10.1109/TAES.2005.1413761.[14] WANG Hanning, LU Biying, ZHOU Zhimin, et al. Through-the-wall imaging and correction based on the estimation of wall parameters[C]. 2011 IEEE CIE International Conference on Radar, Chengdu, China, 2011: 1327–1330. doi: 10.1109/CIE-Radar.2011.6159802.[15] CUI Guolong, KONG Lingjiang, and YANG Jianyu. A back-projection algorithm to stepped-frequency synthetic aperture through-the-wall radar imaging[C]. 2007 1st Asian and Pacific Conference on Synthetic Aperture Radar, Huangshan, China, 2007: 123–126. doi: 10.1109/APSAR.2007.4418570.[16] ROVNAKOVA J and KOCUR D. Compensation of wall effect for through wall tracking of moving targets[J]. Radioengineering, 2009, 18(2): 189–195.[17] JIN Tian, CHEN Bo, and ZHOU Zhimin. Image-domain estimation of wall parameters for autofocusing of through-the-wall SAR imagery[J]. IEEE Transactions on Geoscience and Remote Sensing, 2013, 51(3): 1836–1843. doi: 10.1109/TGRS.2012.2206395.[18] LIU Jiangang, KONG Lingjiang, YANG Xiaobo, et al. Refraction angle approximation algorithm for wall compensation in TWRI[J]. IEEE Geoscience and Remote Sensing Letters, 2016, 13(7): 943–946. doi: 10.1109/LGRS.2016.2555291.[19] ZHAO Yang, LU Biying, and SUN Xin. Three-dimensional imaging for UWB though-the-wall radar[C]. 2013 IEEE Third International Conference on Information Science and Technology, Yangzhou, China, 2013: 1503–1506. doi: 10.1109/ICIST.2013.6747822.[20] AFTANAS I M. Through wall imaging with UWB radar system[D]. [Ph.D. dissertation], Technical University of Kosice, 2010.[21] GU Xiang and ZHANG Yunhua. Autofocus imaging simulation for through-wall radar by using FDTD with unknown wall characteristics[C]. 2010 Asia-Pacific Microwave Conference, Yokohama, Japan, 2010: 1657–1660. -
Proportional views

- Publishing Ethics
- Journal Insights
- Abstracting & Indexing
- Peer Review Policies
- Guide for Authors
- Conference
- ISSN 2095-283X (Print)ISSN 2097-339X (Online)
- CN 10-1030/TN
- CODEN LXEUAO
About Journal
- Sponsor: China Radio Detection and Ranging Industry Association (CRIA)
- Phone: 010-58887062
- Email:radars@aircas.ac.cn
- Publisher: Leida Xuebao Bianjibu (Editorial office of the Journal of Radars)
Contacts Us

京ICP备20021838号-14
Supported by: Beijing Renhe Information Technology Co. Ltd

Export File
Citation
Format
Content
 DownLoad:
DownLoad:





- Figure 1. The block diagram of MIMO radar system
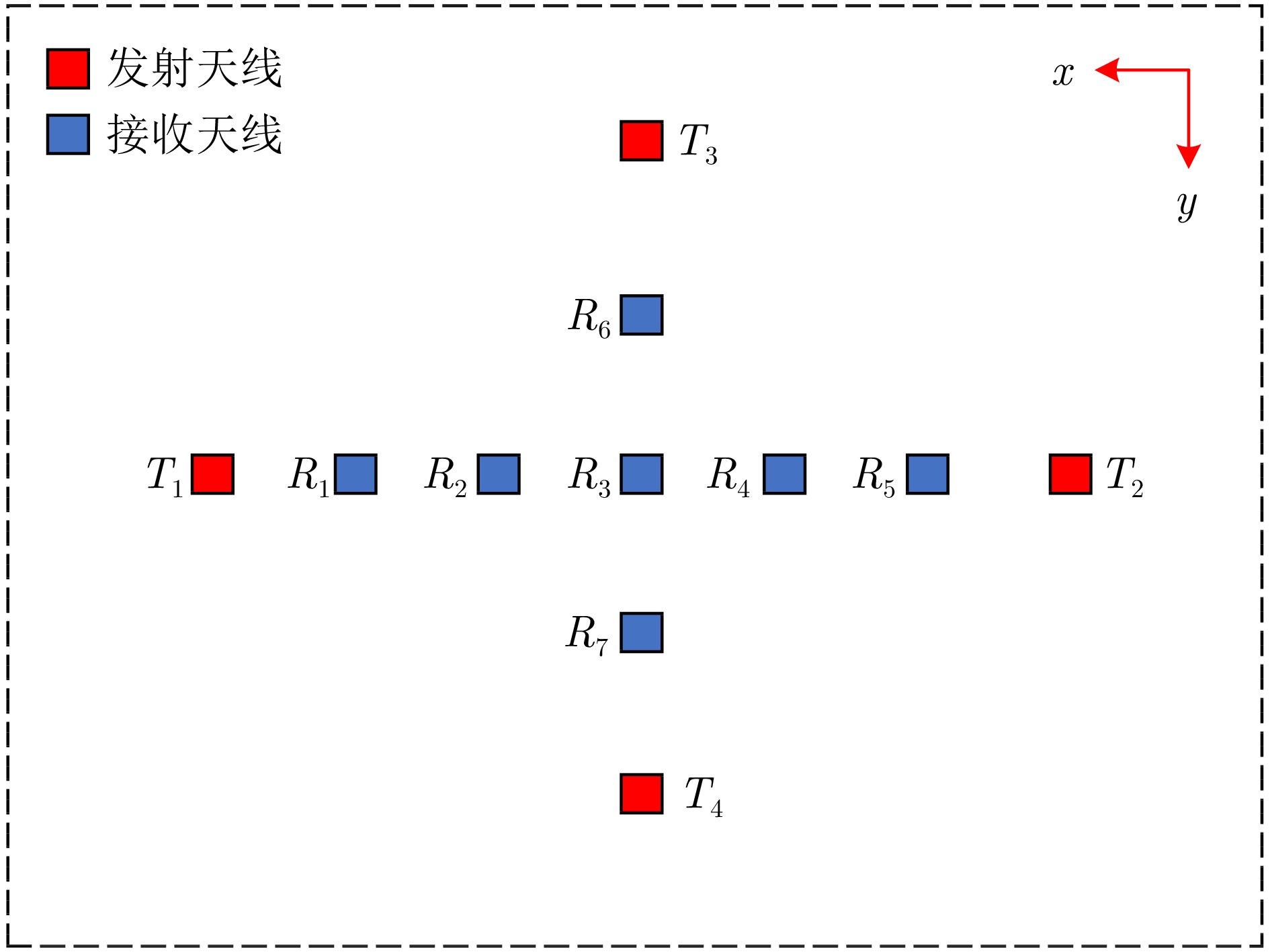
- Figure 2. The physical structure of the antenna array
- Figure 3. The corner reflector imaging scenario
- Figure 4. 3D imaging results of the corner reflector before and after calibration
- Figure 5. Flowchart of the proposed refocusing algorithm
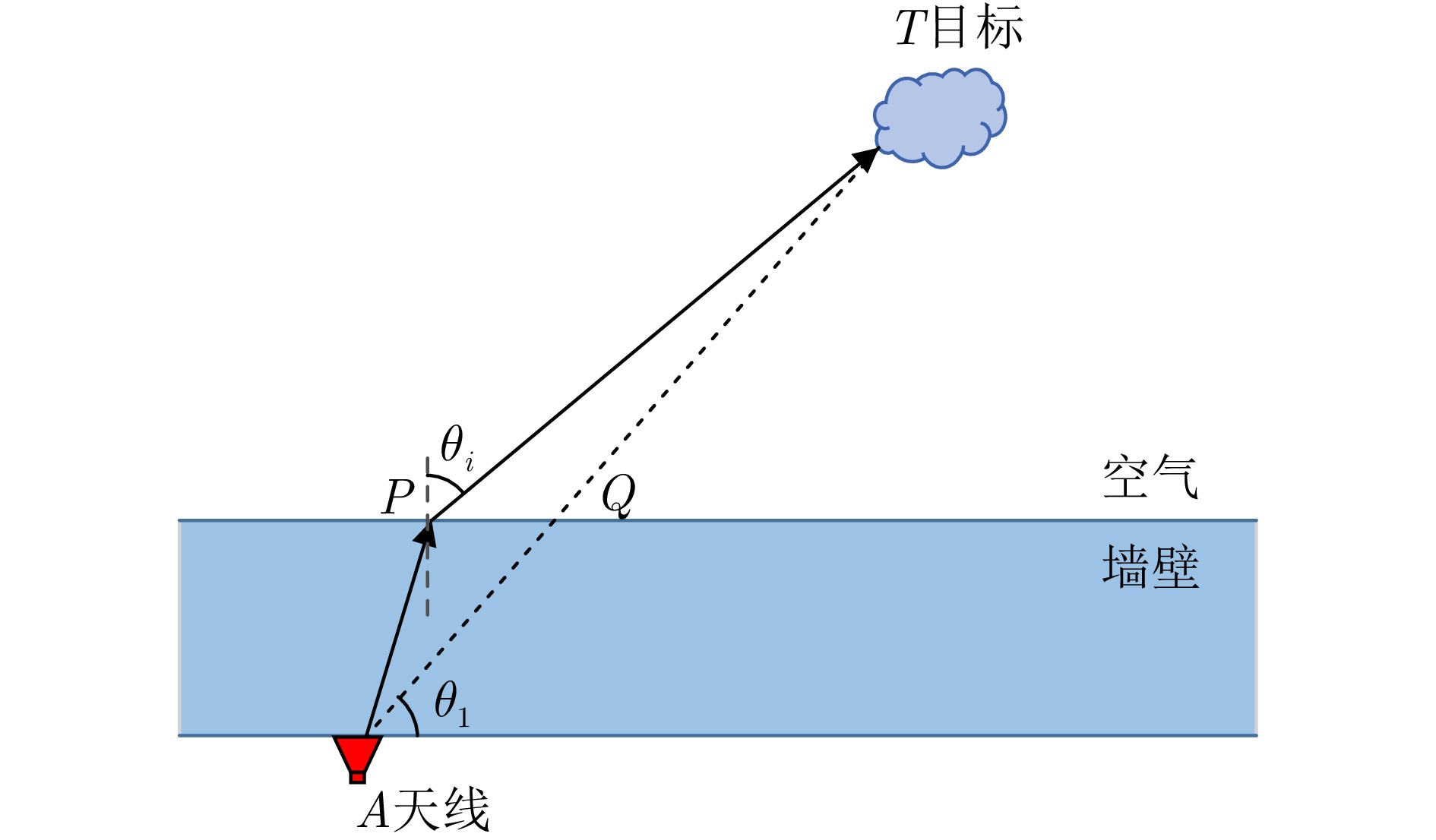
- Figure 6. 2D propagation path through the wall
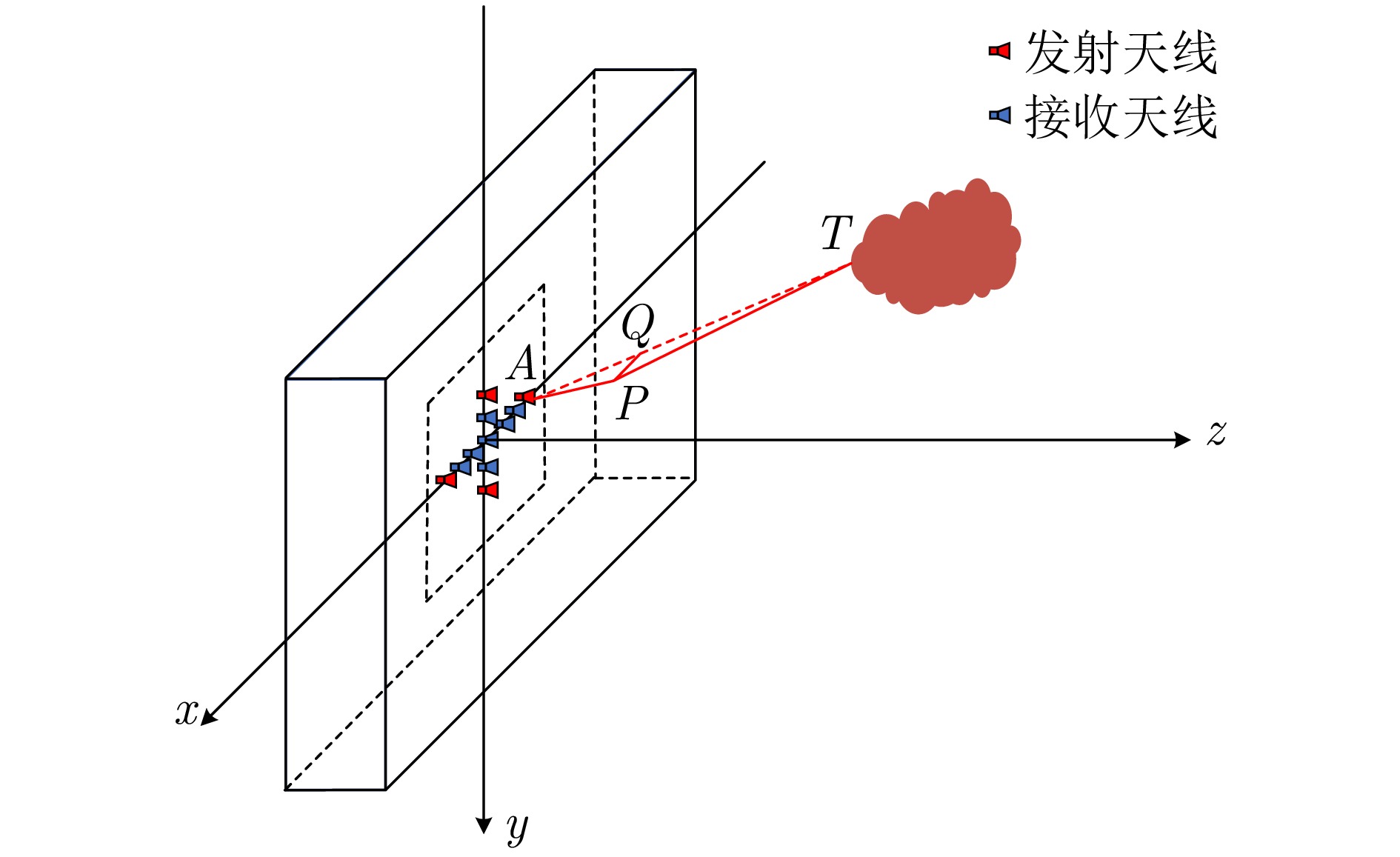
- Figure 7. 3D wall penetrating model
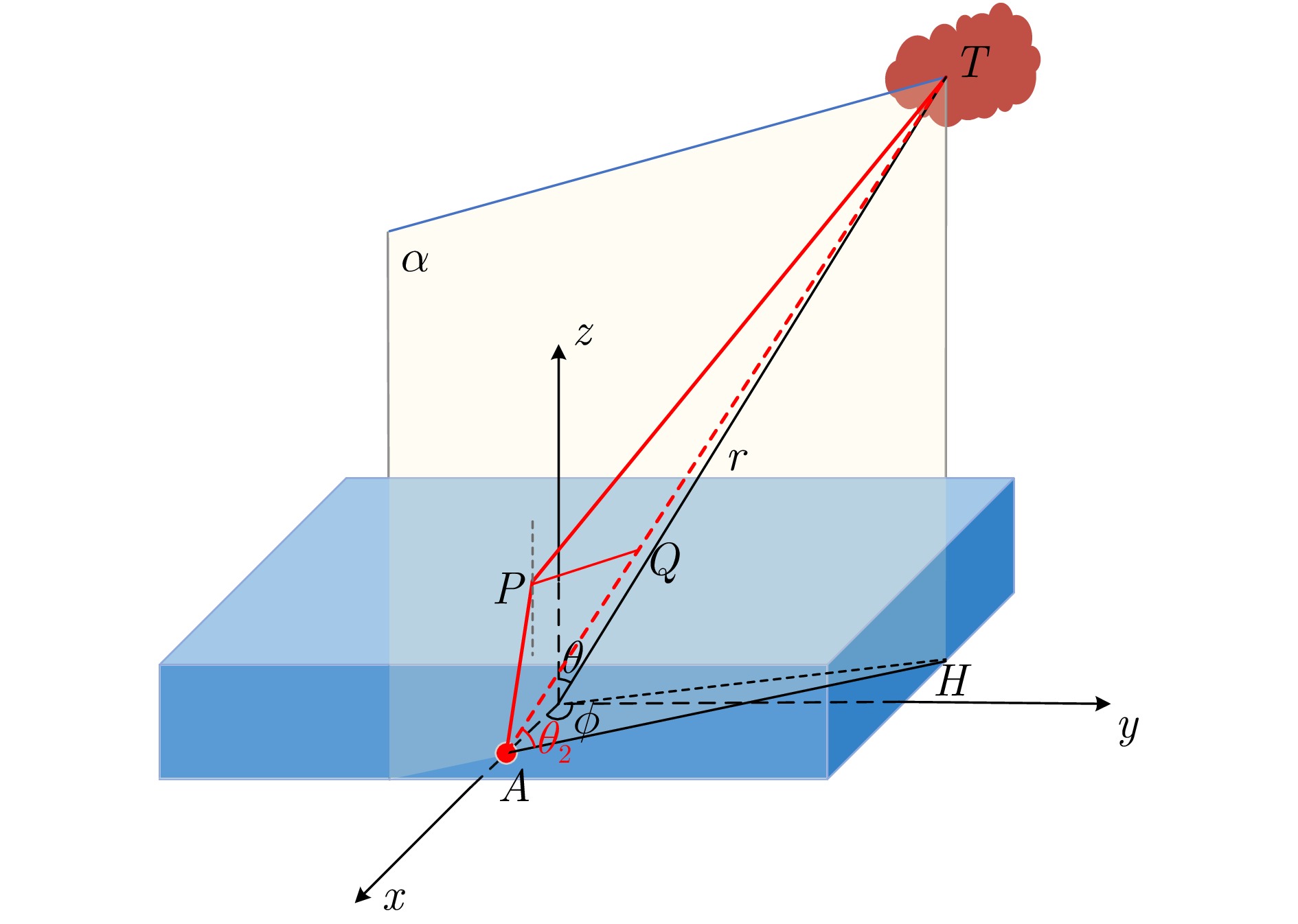
- Figure 8. 3D propagation path through the wall
-
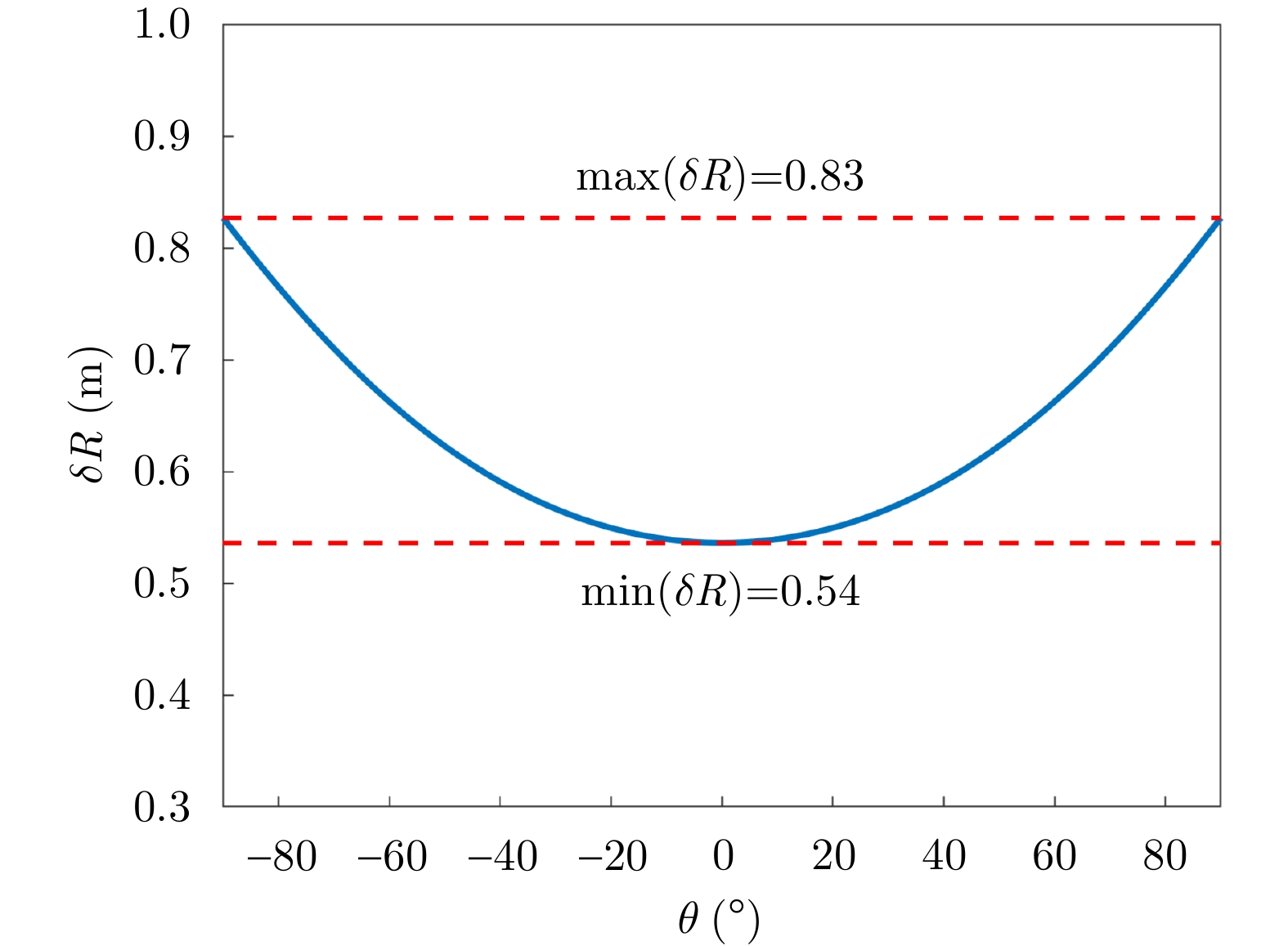
Figure 9. The variation of
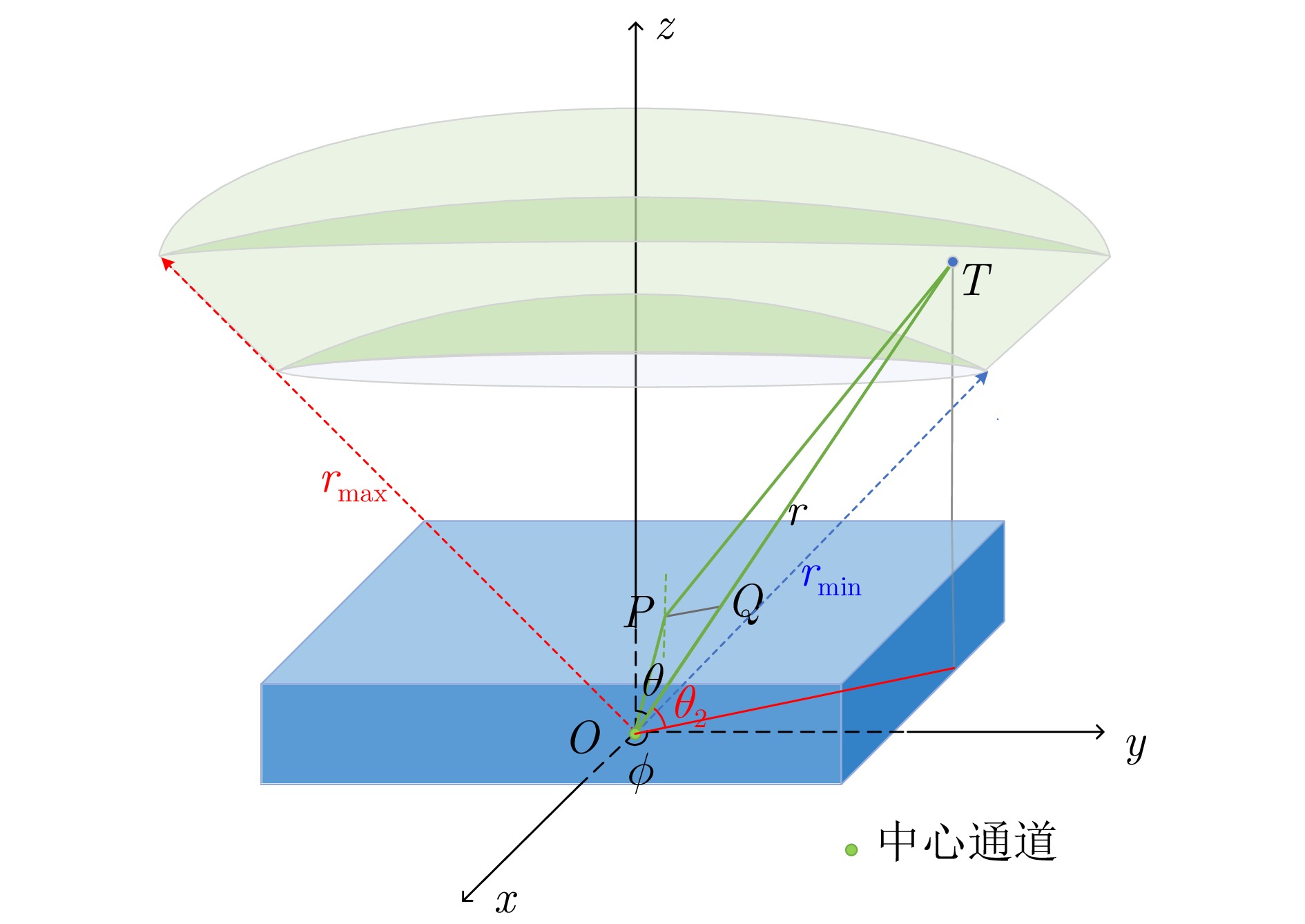
$\delta R$ $\theta $ - Figure 10. Local imaging in 3D space
- Figure 11. Grid partitioning with regional focus
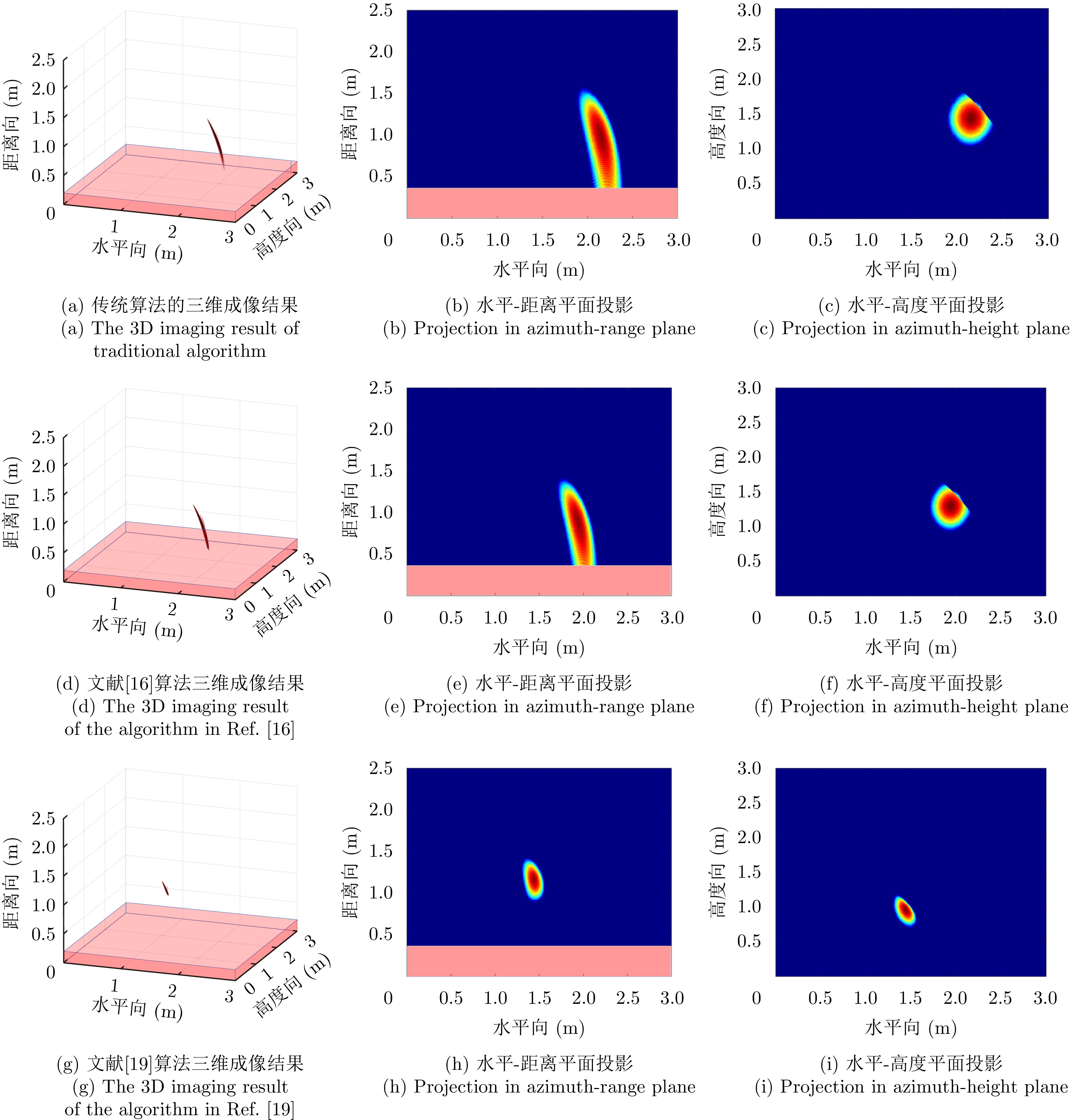
- Figure 12. The imaging results of traditional algorithm
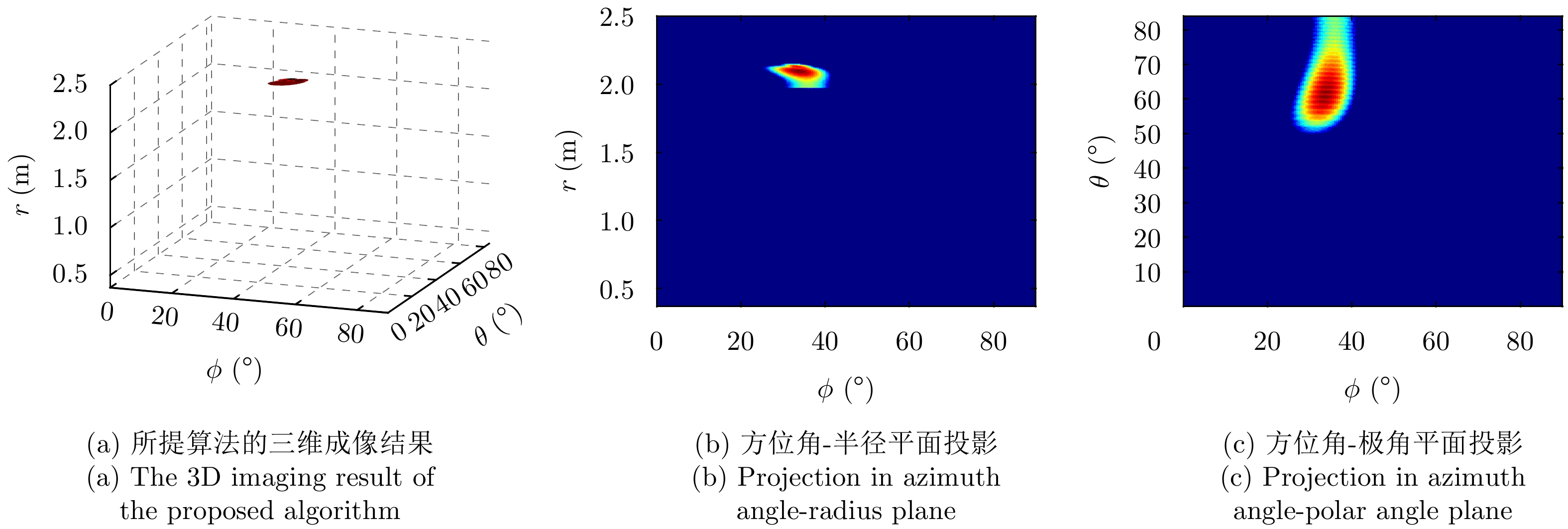
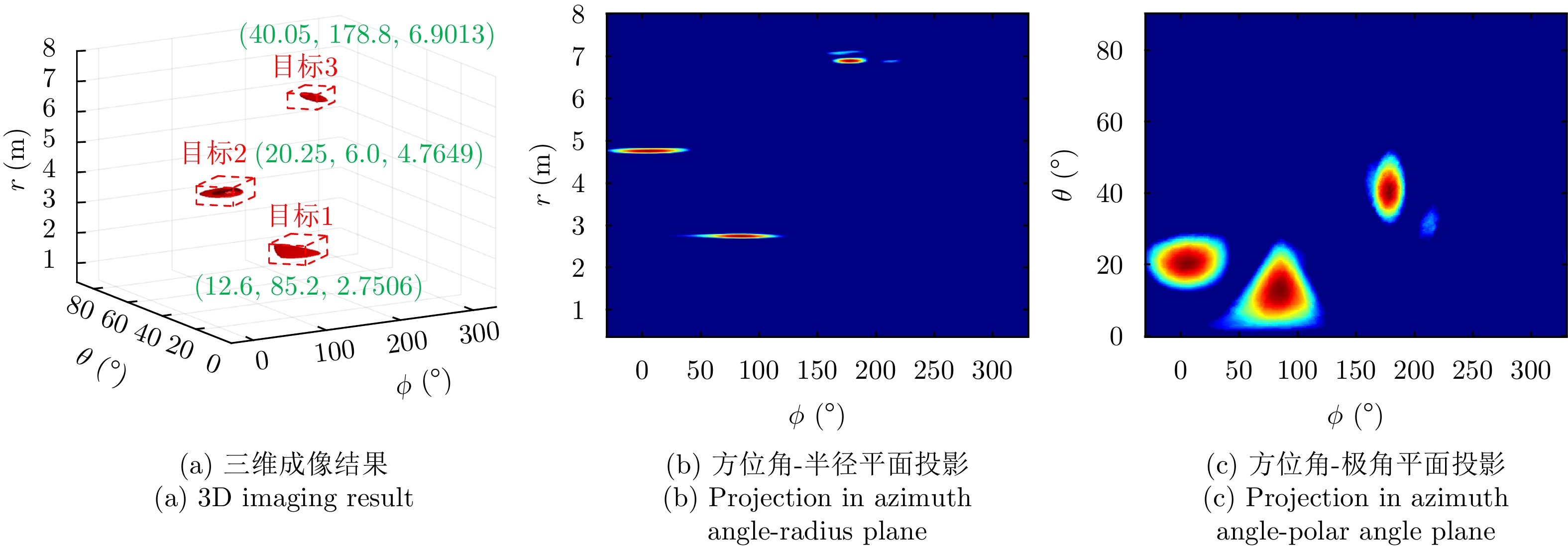
- Figure 13. The simulation imaging results of the proposed algorithm
- Figure 14. Target positioning error curve
- Figure 15. The experimental scenario of two human targets
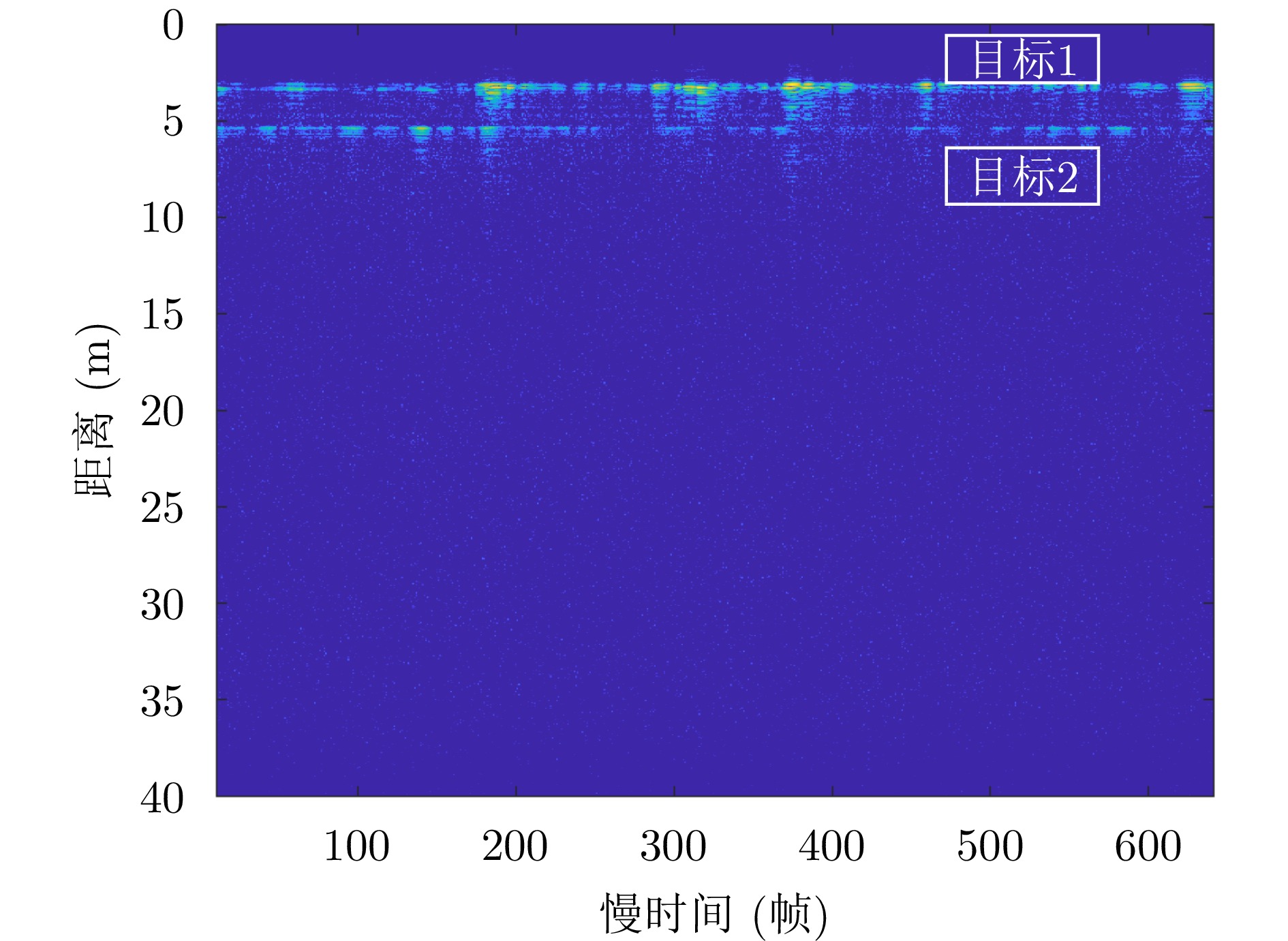
- Figure 16. Center channel echo range-slow time distribution
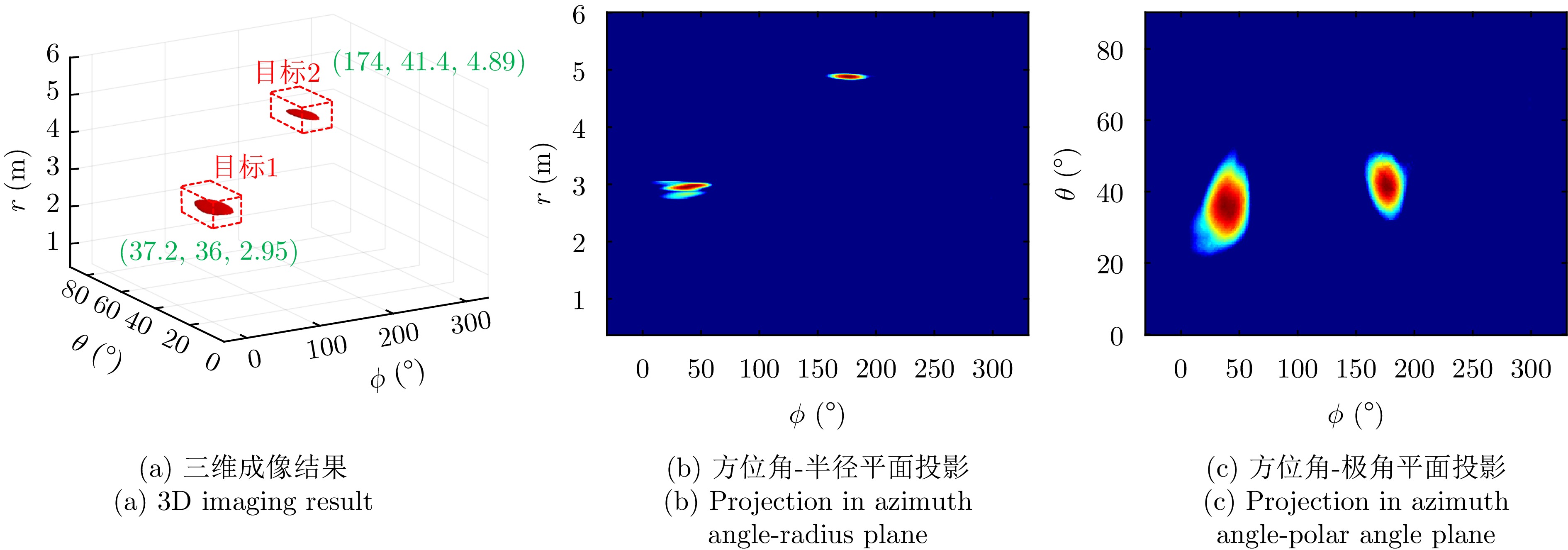
- Figure 17. The imaging results of two human targets using the proposed algorithm
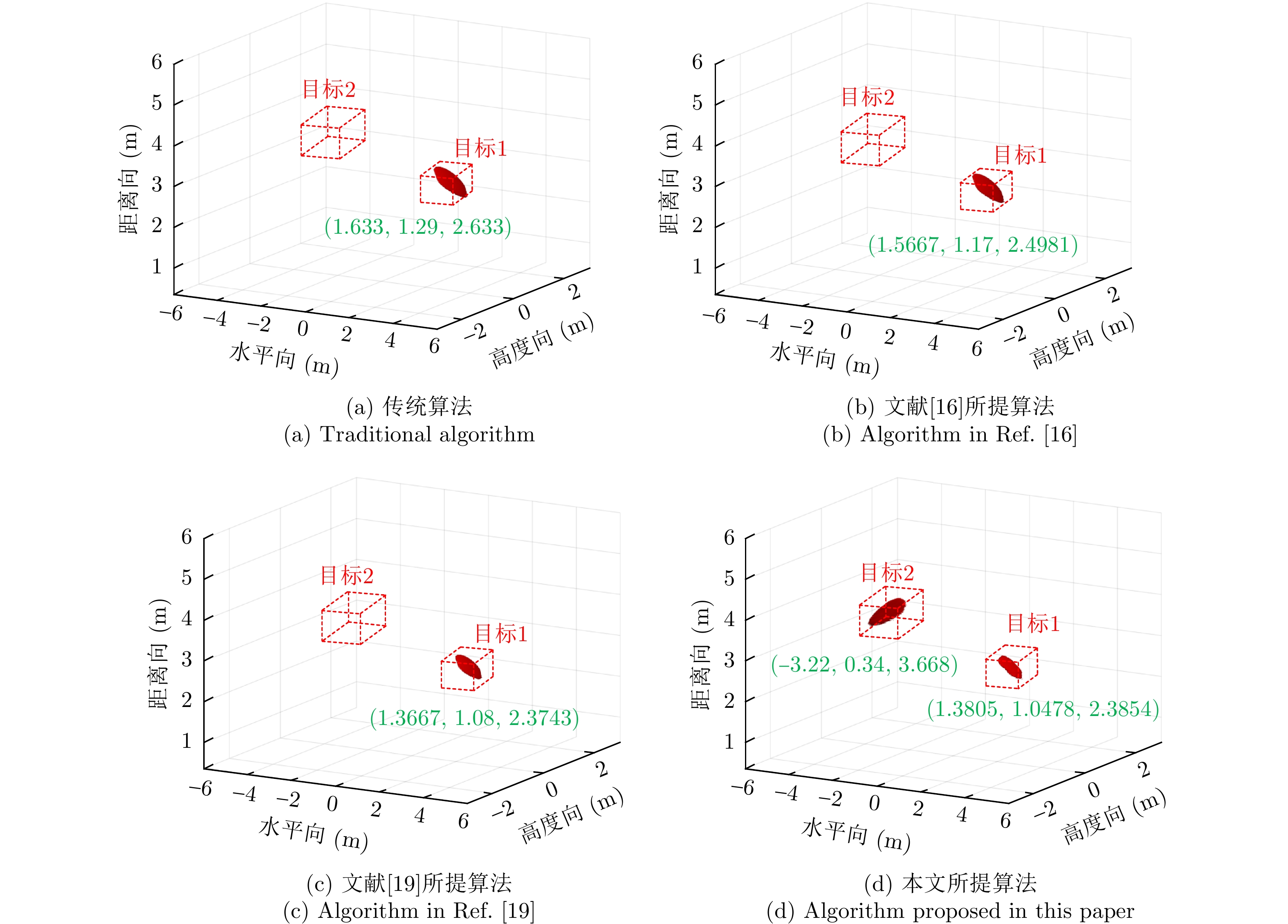
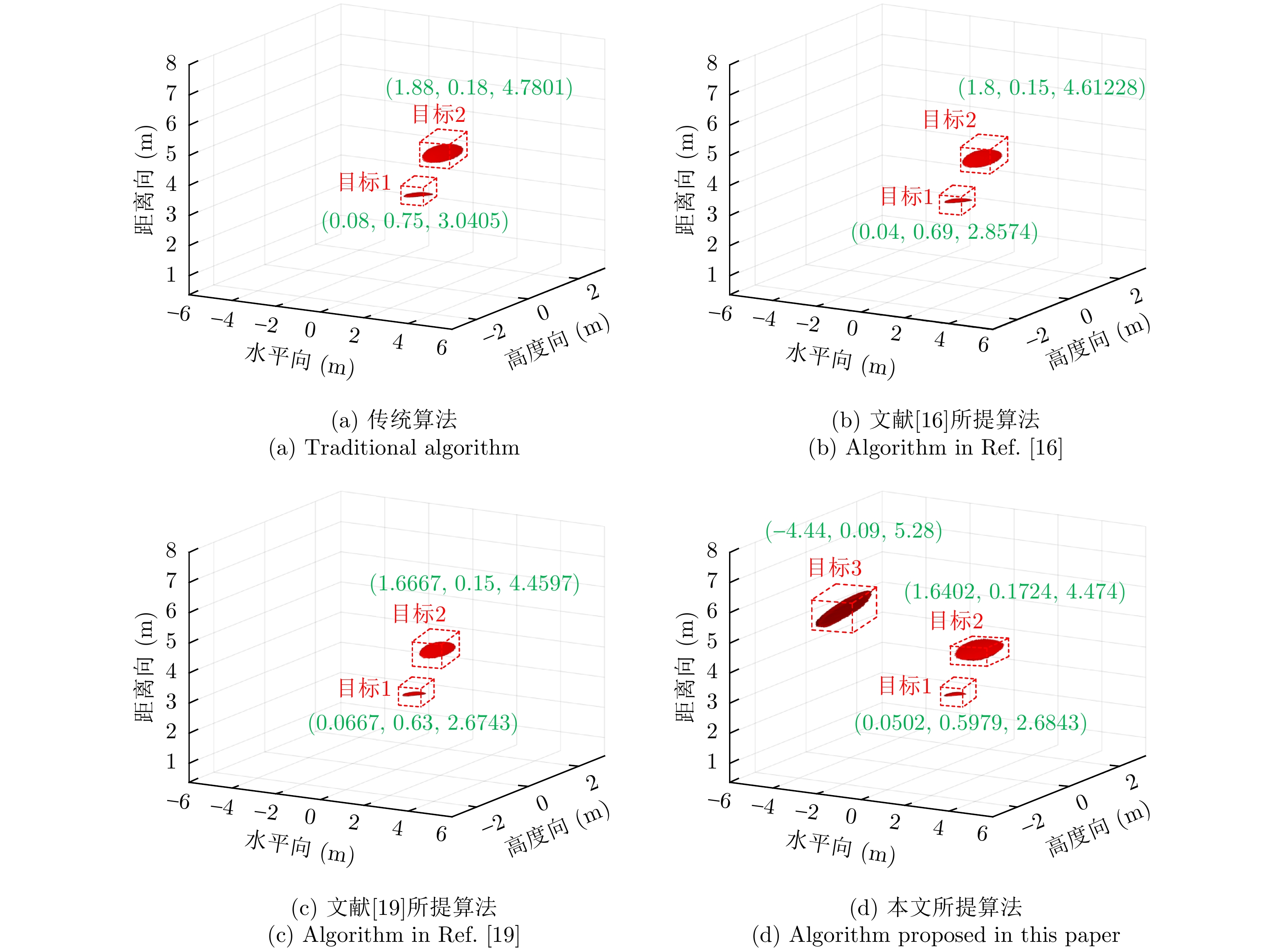
- Figure 18. The 3D imaging results of two human targets using various algorithms
- Figure 19. The experimental scenario of three human targets
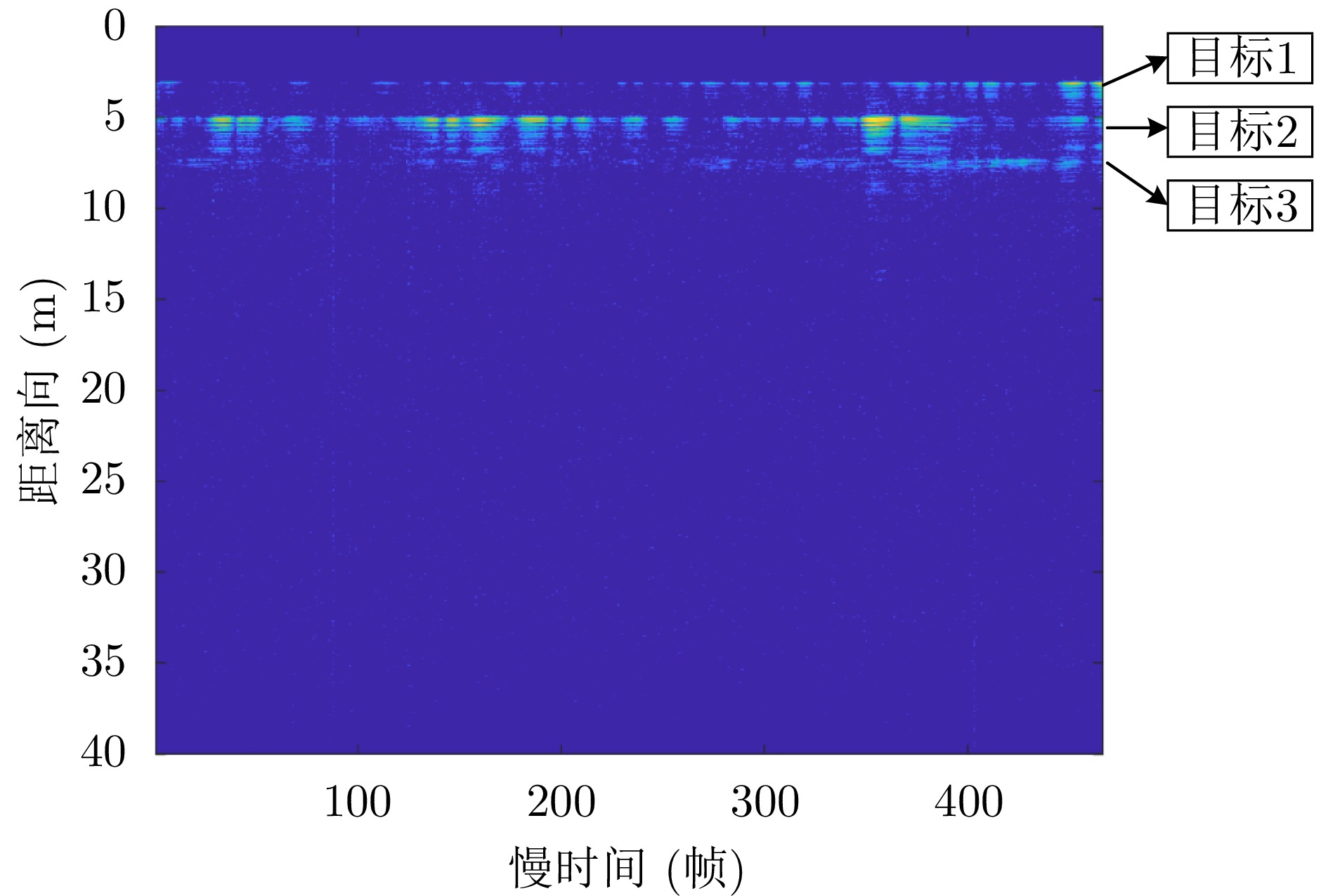
- Figure 20. Center channel echo range-slow time distribution of three human targets
- Figure 21. The imaging results of three human targets using the proposed algorithm
- Figure 22. The 3D imaging results of three human targets using various algorithms
- Figure 23. Narrow space experimental scene
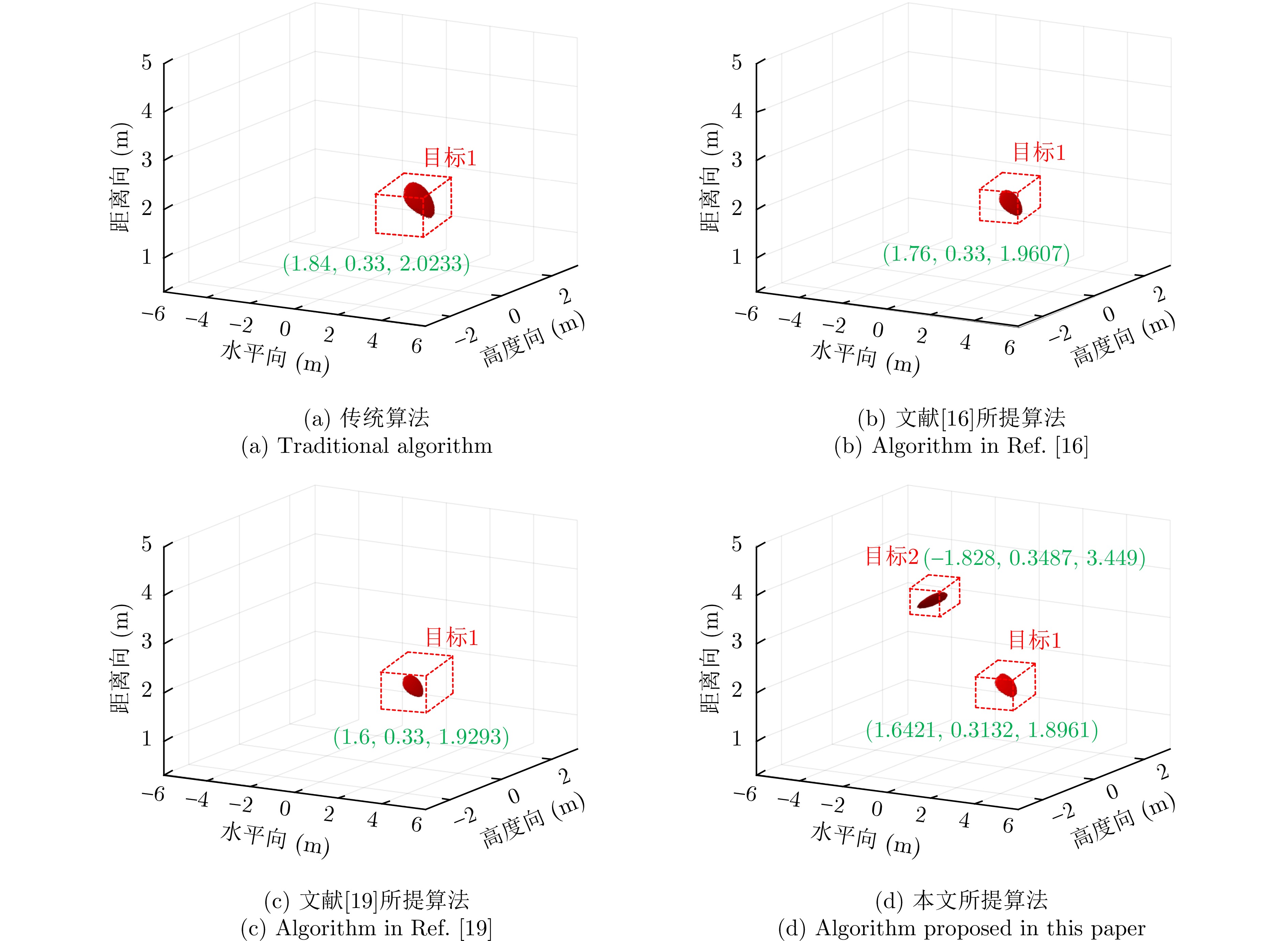
- Figure 24. Imaging results of various methods in a narrow spaces