
 Submit Manuscript
Submit Manuscript Peer Review
Peer Review Editor Work
Editor Work- Home
- Articles & Issues
-
Data
- Dataset of Radar Detecting Sea
- SAR Dataset
- SARGroundObjectsTypes
- SARMV3D
- AIRSAT Constellation SAR Land Cover Classification Dataset
- 3DRIED
- UWB-HA4D
- LLS-LFMCWR
- FAIR-CSAR
- MSAR
- SDD-SAR
- FUSAR
- SpaceborneSAR3Dimaging
- Sea-land Segmentation
- SAR Multi-domain Ship Detection Dataset
- SAR-Airport
- Hilly and mountainous farmland time-series SAR and ground quadrat dataset
- SAR images for interference detection and suppression
- HP-SAR Evaluation & Analytical Dataset
- GDHuiYan-ATRNet
- Multi-System Maritime Low Observable Target Dataset
- DatasetinthePaper
- DatasetintheCompetition
- Report
- Course
- About
- Publish
- Editorial Board
- Chinese

| Citation: | XU Kaiming, WANG Bailu, LI Suqi, et al. Move-stop-move target tracking with low-altitude surveillance radars[J]. Journal of Radars, 2022, 11(3): 443–458. doi: 10.12000/JR21211

|
Move-stop-move Target Tracking with Low-altitude Surveillance Radars
DOI: 10.12000/JR21211 CSTR: 32380.14.JR21211
More Information-
Abstract
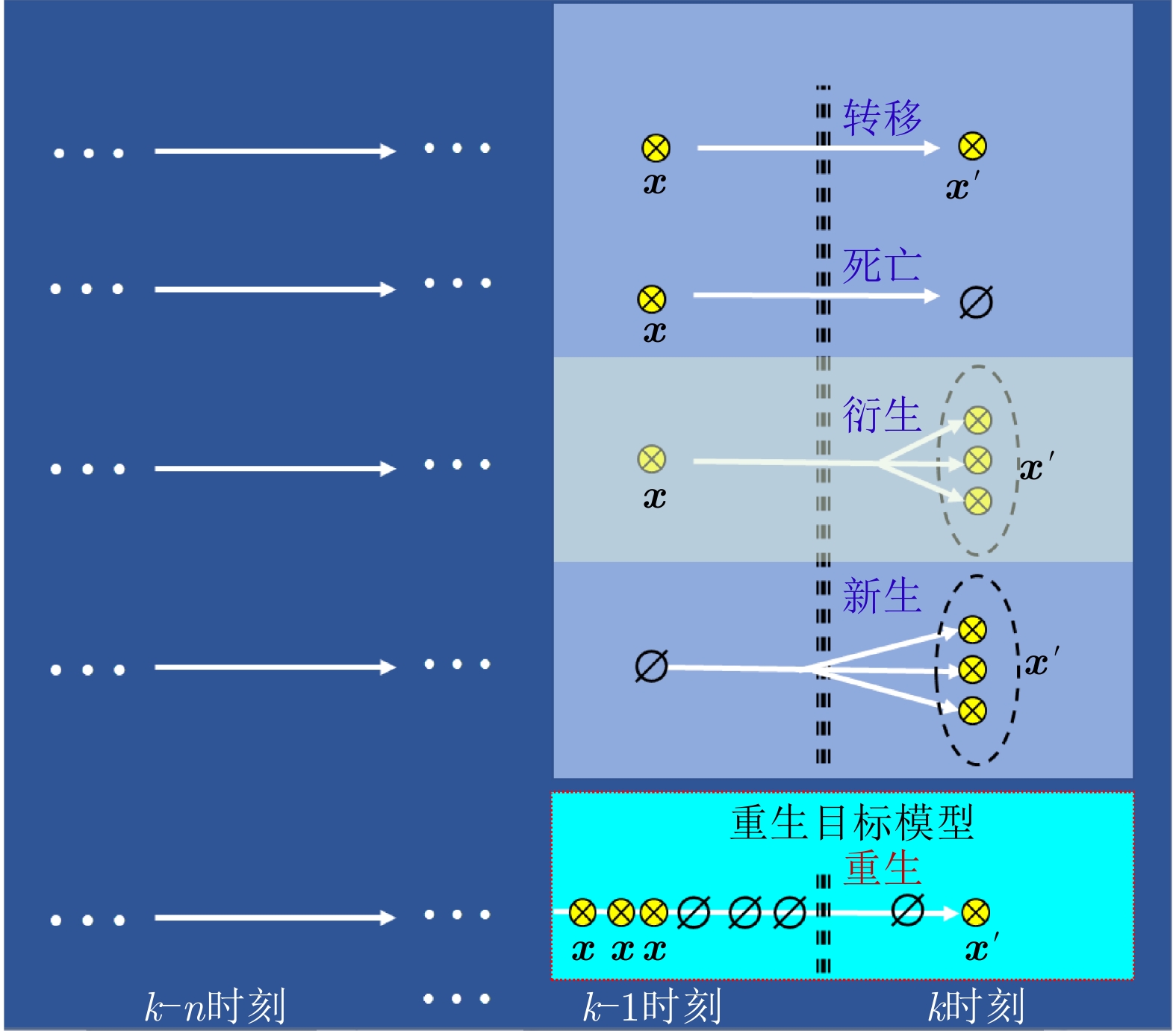
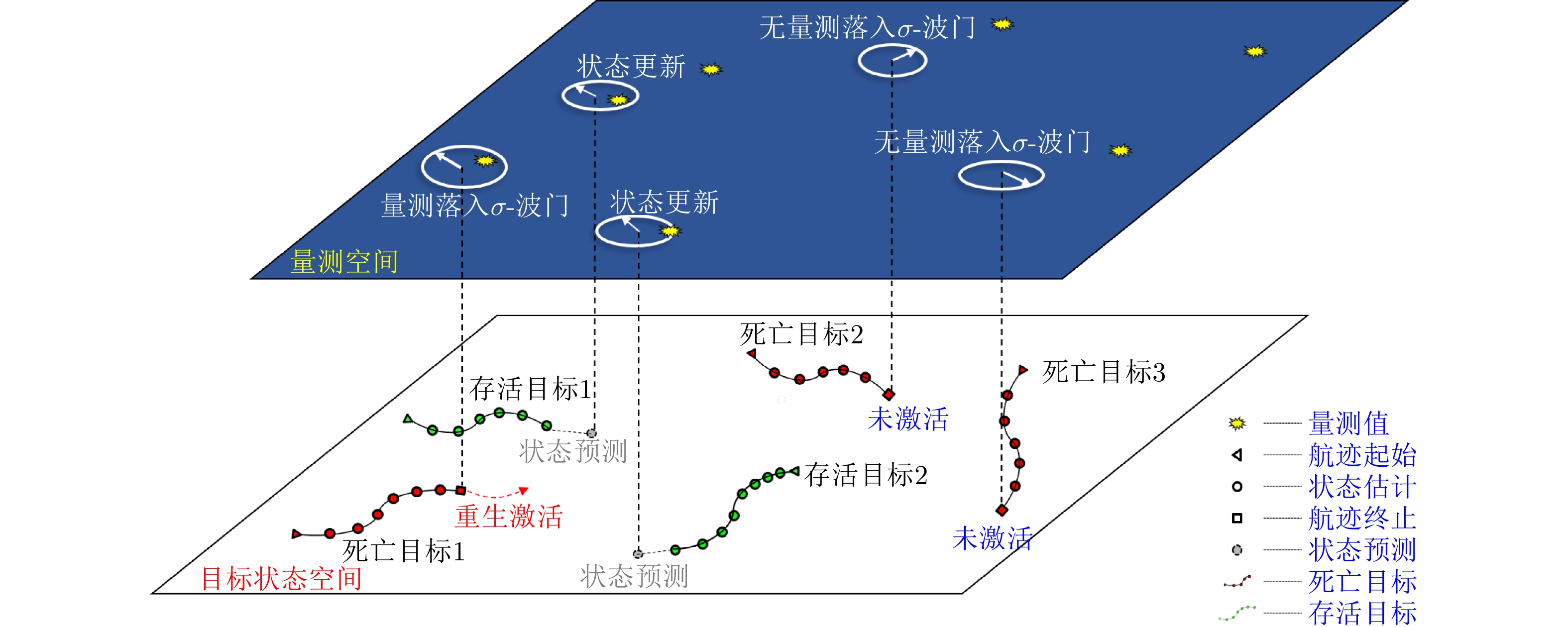
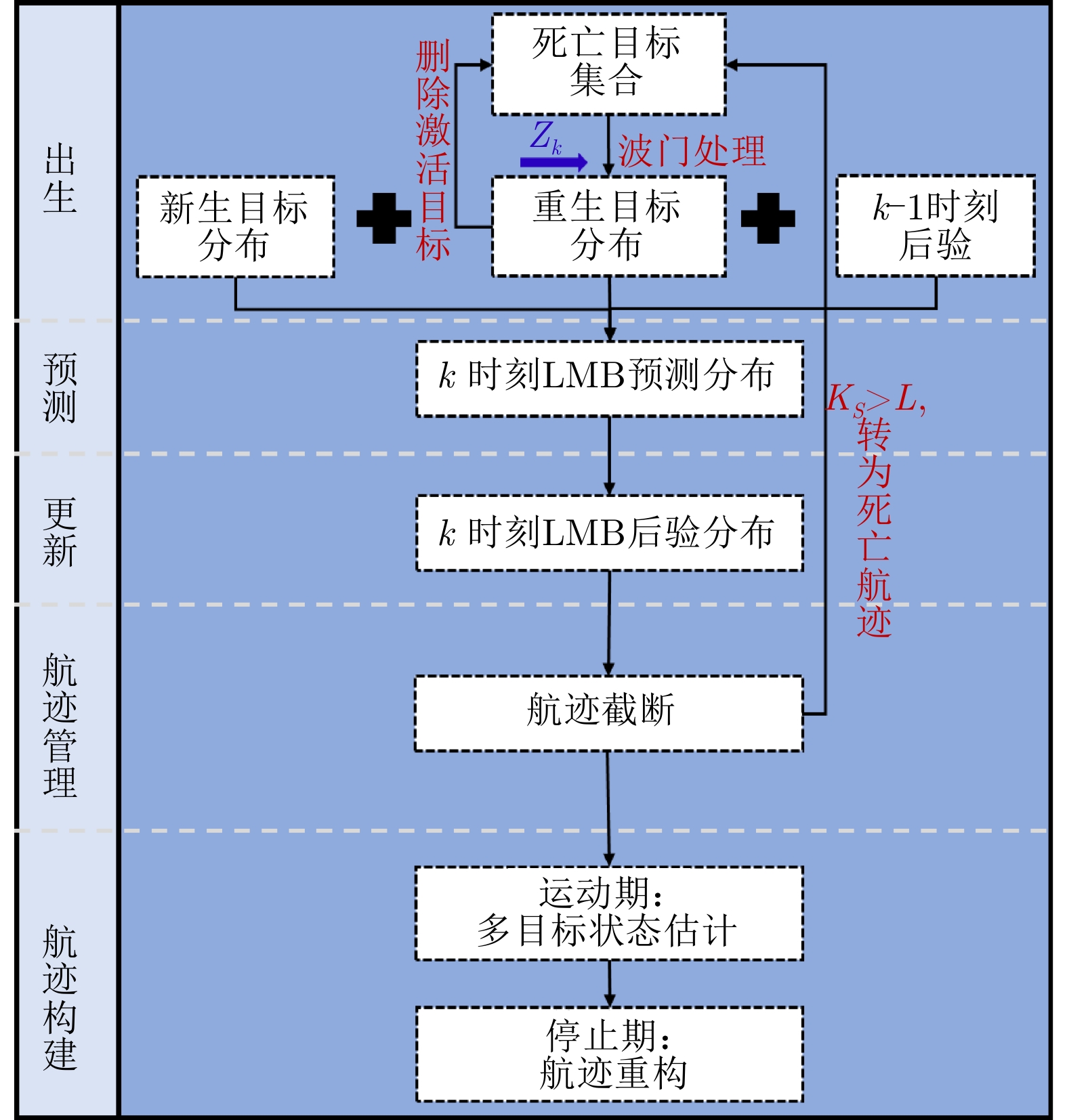
Low-altitude small targets, represented by rotor unmanned aerial vehicles, always adopt slow move-and-stop strategy or employ an obstacle blocking strategy to avoid radar detection and conduct point-and-point strikes or interference on important information equipment and strategic bases. This type of target can appear and disappear from the radar Field of View (FoV) multiple times, thus, it is referred to as move-stop-move targets. Dealing with this type of target using traditional tracking models and algorithms can lead to discontinuities in target identity and track fragmentation. To this end, this study investigates the tracking problem of move-stop-move targets with the Labeled Multi-Bernoulli (LMB) filter based on random finite set statistics. To describe the evolution characteristics of multiple entries to the radar FoV, first, we introduce the third type of birth procedure, that is, the Re-Birth (RB) procedure. Specifically, based on the spatial and kinematic relationships between target states before and after returning to the radar FoV, a Spatial Correlation-based RB (SC-RB) procedure is proposed. Then, in the framework of Bayesian filtering, we derive the SC-RB-LMB filter with the proposed SC-RB model, which is capable of tracking move-stop-move targets continuously with its identity unchanged. In typical low-altitude surveillance scenarios, the effectiveness of the proposed model and algorithm is highlighted. -

-
References
[1] 丁凯. 低空监视雷达信号处理方法研究[D]. [硕士论文], 电子科技大学, 2017: 1–93.DING Kai. Research on radar signal processing method of low altitude surveillance[D]. [Master dissertation], University of Electronic Science and Technology of China, 2017: 1–93.[2] 张浩. 低空目标探测雷达高速目标检测与跟踪技术研究与实现[D]. [硕士论文], 电子科技大学, 2016: 1–91.ZHANG Hao. Research on algorithm and implementation of low-altitude and high-speed targets detection and tracking[D]. [Master dissertation], University of Electronic Science and Technology of China, 2016: 1–91.[3] KIRUBARAJAN T and BAR-SHALOM Y. Tracking evasive move-stop-move targets with a GMTI radar using a VS-IMM estimator[J]. IEEE Transactions on Aerospace and Electronic Systems, 2003, 39(3): 1098–1103. doi: 10.1109/TAES.2003.1238762[4] LIN L, BAR-SHALOM Y, and KIRUBARAJAN T. New assignment-based data association for tracking move-stop-move targets[J]. IEEE Transactions on Aerospace and Electronic Systems, 2004, 40(2): 714–725. doi: 10.1109/TAES.2004.1310016[5] ZHANG Shuo and BAR-SHALOM Y. Tracking move-stop-move targets with state-dependent mode transition probabilities[J]. IEEE Transactions on Aerospace and Electronic Systems, 2011, 47(3): 2037–2054. doi: 10.1109/TAES.2011.5937281[6] HERNANDEZ M, BENAVOLI A, GRAZIANO A, et al. Performance measures and MHT for tracking move-stop-move targets with MTI sensors[J]. IEEE Transactions on Aerospace and Electronic Systems, 2011, 47(2): 996–1025. doi: 10.1109/TAES.2011.5751239[7] LIU Shuo, LI Hongbo, ZHANG Yun, et al. Multiple hypothesis method for tracking move-stop-move target[J]. The Journal of Engineering, 2019, 2019(19): 6155–6159. doi: 10.1049/joe.2019.0182[8] CORALUPPI S P, CARTHEL C A, and WILLSKY A S. Multi-sensor tracking of move-stop-move targets[C]. Proceedings of 2017 Sensor Data Fusion: Trends, Solutions, Applications, Bonn, Germany, 2017: 1–6.[9] MAHLER R P S. Statistical Multisource-Multitarget Information Fusion[M]. Boston, USA: Artech House, 2007: 1–888.[10] MAHLER R P S. Multitarget Bayes filtering via first-order multitarget moments[J]. IEEE Transactions on Aerospace and Electronic Systems, 2003, 39(4): 1152–1178. doi: 10.1109/TAES.2003.1261119[11] VO B T, VO B N, and CANTONI A. Analytic implementations of the cardinalized probability hypothesis density filter[J]. IEEE Transactions on Signal Processing, 2007, 55(7): 3553–3567. doi: 10.1109/TSP.2007.894241[12] VO B T, VO B N, and CANTONI A. The cardinality balanced multi-target multi-Bernoulli filter and its implementations[J]. IEEE Transactions on Signal Processing, 2009, 57(2): 409–423. doi: 10.1109/TSP.2008.2007924[13] 王佰录, 易伟, 李溯琪, 等. 分布式多目标伯努利滤波器的网络共识技术[J]. 信号处理, 2018, 34(1): 1–12. doi: 10.16798/j.issn.1003-0530.2018.01.001WANG Bailu, YI Wei, LI Suqi, et al. Consensus for distributed multi-Bernoulli filter[J]. Journal of Signal Processing, 2018, 34(1): 1–12. doi: 10.16798/j.issn.1003-0530.2018.01.001[14] VO B T and VO B N. Labeled random finite sets and multi-object conjugate priors[J]. IEEE Transactions on Signal Processing, 2013, 61(13): 3460–3475. doi: 10.1109/TSP.2013.2259822[15] VO B N, VO B T, and PHUNG D. Labeled random finite sets and the Bayes multi-target tracking filter[J]. IEEE Transactions on Signal Processing, 2014, 62(24): 6554–6567. doi: 10.1109/TSP.2014.2364014[16] REUTER S, VO B T, VO B N, et al. The labeled multi-Bernoulli filter[J]. IEEE Transactions on Signal Processing, 2014, 62(12): 3246–3260. doi: 10.1109/TSP.2014.2323064[17] LI Suqi, YI Wei, HOSEINNEZHAD R, et al. Multi-object tracking for generic observation model using labeled random finite sets[J]. IEEE Transactions on Signal Processing, 2018, 66(2): 368–383. doi: 10.1109/TSP.2017.2764864[18] XIE Xin, SUN Hemin, WU Weihua, et al. MM-GM-PHD filter-based maneuvering target tracking in the presence of Doppler blind zone[C]. The IEEE 3rd Information Technology, Networking, Electronic and Automation Control Conference, Chengdu, China, 2019: 1352–1357.[19] WU Weihua, SUN Hemin, CAI Yichao, et al. Tracking multiple maneuvering targets hidden in the DBZ based on the MM-GLMB filter[J]. IEEE Transactions on Signal Processing, 2020, 68: 2912–2924. doi: 10.1109/TSP.2020.2988635[20] LI Suqi, BATTISTELLI G, CHISCI L, et al. Computationally efficient multi-agent multi-object tracking with labeled random finite sets[J]. IEEE Transactions on Signal Processing, 2019, 67(1): 260–275. doi: 10.1109/TSP.2018.2880704[21] LI Suqi, YI Wei, HOSEINNEZHAD R, et al. Robust distributed fusion with labeled random finite sets[J]. IEEE Transactions on Signal Processing, 2018, 66(2): 278–293. doi: 10.1109/TSP.2017.2760286[22] 李溯琪. 基于标号随机集的传感器网络分布式融合技术研究[D]. [博士论文], 电子科技大学, 2018: 1–142.LI Suqi. Labeled random finite set based distributed fusion over sensor network[D]. [Ph. D. dissertation], University of Electronic Science and Technology of China, 2018: 1–142.[23] SCHUHMACHER D, VO B T, and VO B N. A consistent metric for performance evaluation of multi-object filters[J]. IEEE Transactions on Signal Processing, 2008, 56(8): 3447–3457. doi: 10.1109/TSP.2008.920469[24] 邹伟, 刘兵, 孙倩. 多源信息融合能力评估关键技术综述[J]. 计算机与数学工程, 2010, 38(3): 1–5, 70. doi: 10.3969/j.issn.1672-9722.2010.03.001ZOU Wei, LIU Bing, and SUN Qian. Survey of key technologies on efficiency evaluation of information fusion system with multiple sources[J]. Computer and Digital Engineering, 2010, 38(3): 1–5, 70. doi: 10.3969/j.issn.1672-9722.2010.03.001 -
Proportional views


- Publishing Ethics
- Journal Insights
- Abstracting & Indexing
- Peer Review Policies
- Guide for Authors
- Conference
- ISSN 2095-283X (Print)ISSN 2097-339X (Online)
- CN 10-1030/TN
- CODEN LXEUAO
About Journal
- Sponsor: China Radio Detection and Ranging Industry Association (CRIA)
- Phone: 010-58887062
- Email:radars@aircas.ac.cn
- Publisher: Leida Xuebao Bianjibu (Editorial office of the Journal of Radars)
Contacts Us

京ICP备20021838号-14
Supported by: Beijing Renhe Information Technology Co. Ltd

Export File
Citation
Format
Content
 DownLoad:
DownLoad:

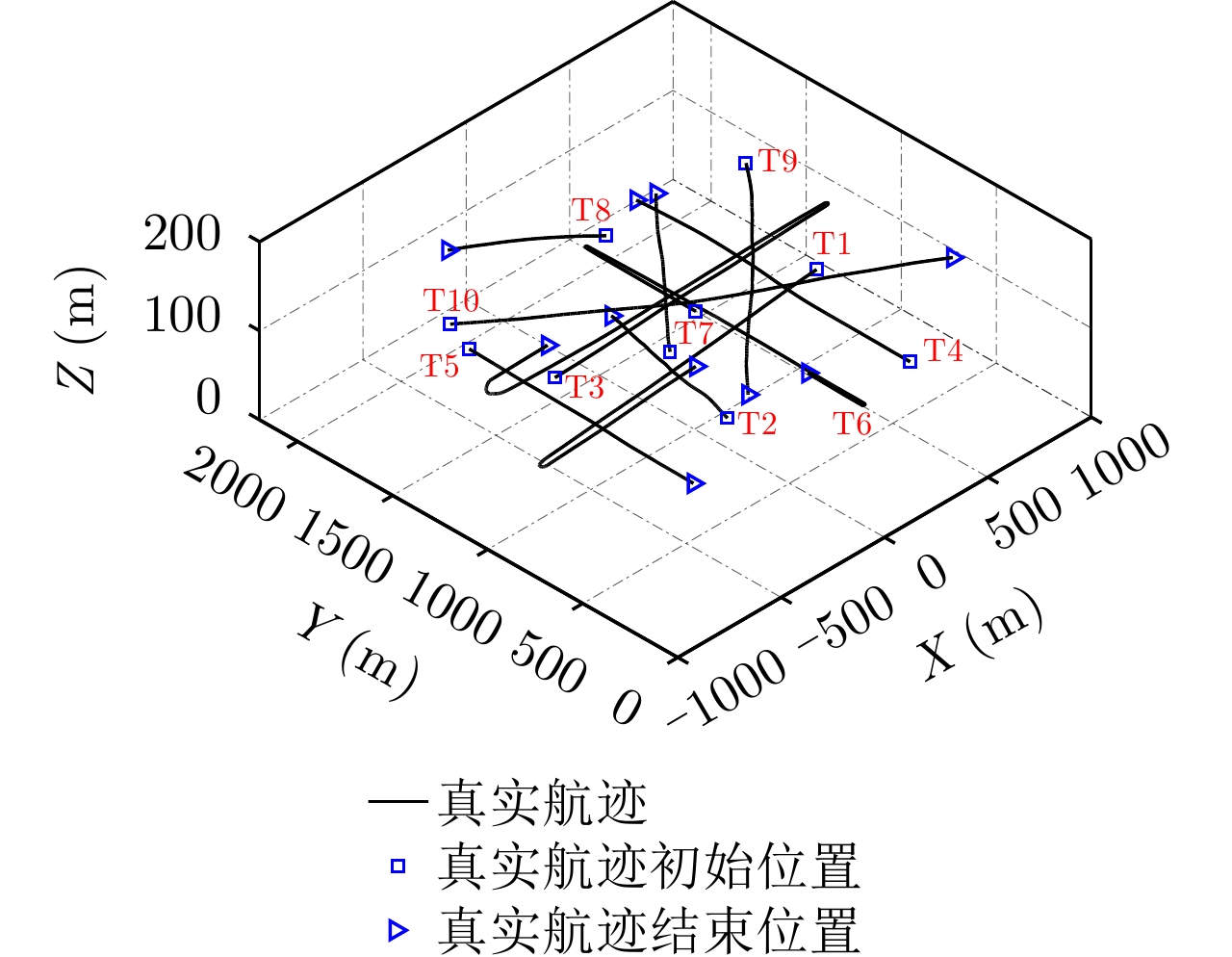



- Figure 1. Trajectories of move-stop-move targets
- Figure 2. Markov transition of multiple move-stop-move targets
- Figure 3. The activation process of deaths
- Figure 4. The overall flow diagram of the SC-RB-LMB filter algorithm
- Figure 5. Sensor model of low-altitude surveillance radars
- Figure 6. The radar surveillance senario: 3D-ground truths
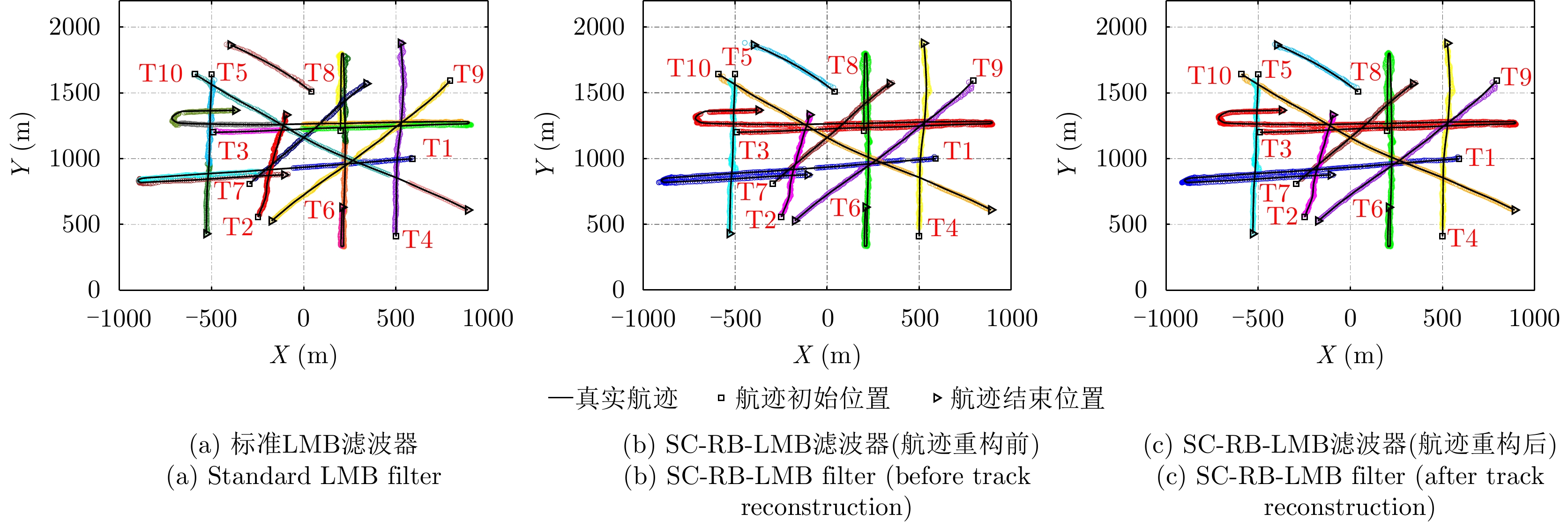
- Figure 7. 2D target track estimation for single Monte-Carlo experiment
- Figure 8. Tracking performance comparison among different algorithms
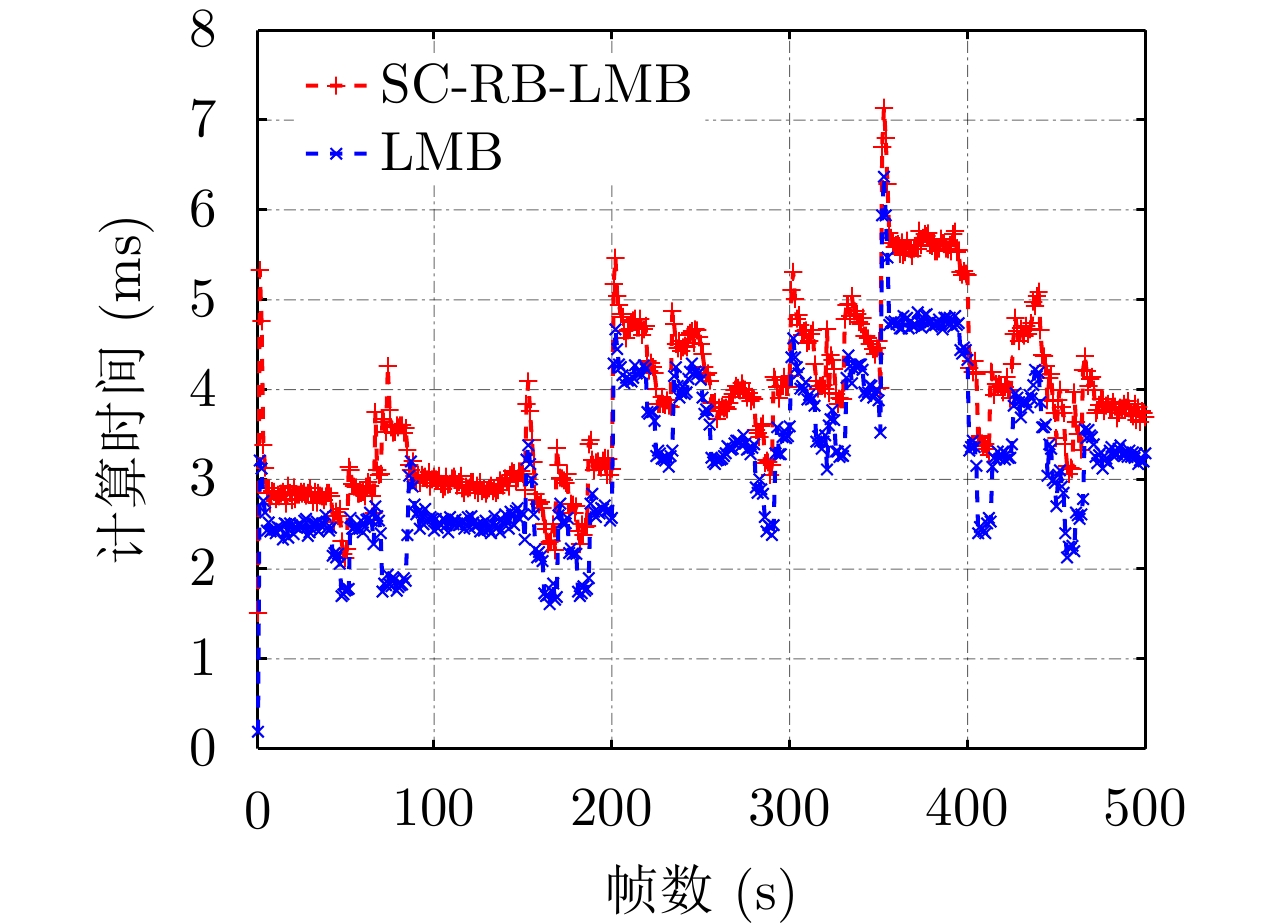
- Figure 9. Comparison of execution times
- Figure 10. Tracking performance comparison of SC-RB-LMB filter under different clutter rates
- Figure 11. Tracking performance comparison of SC-RB-LMB filter under different detection probabilities
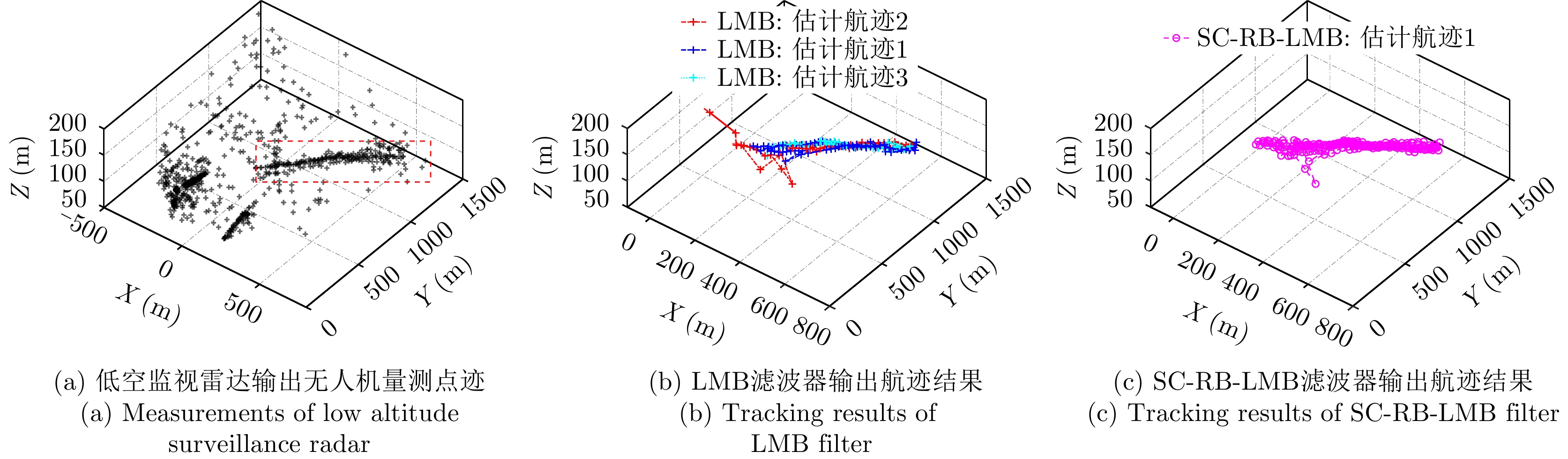
- Figure 12. Long palindrome path of the UAV- tracking performance comparison
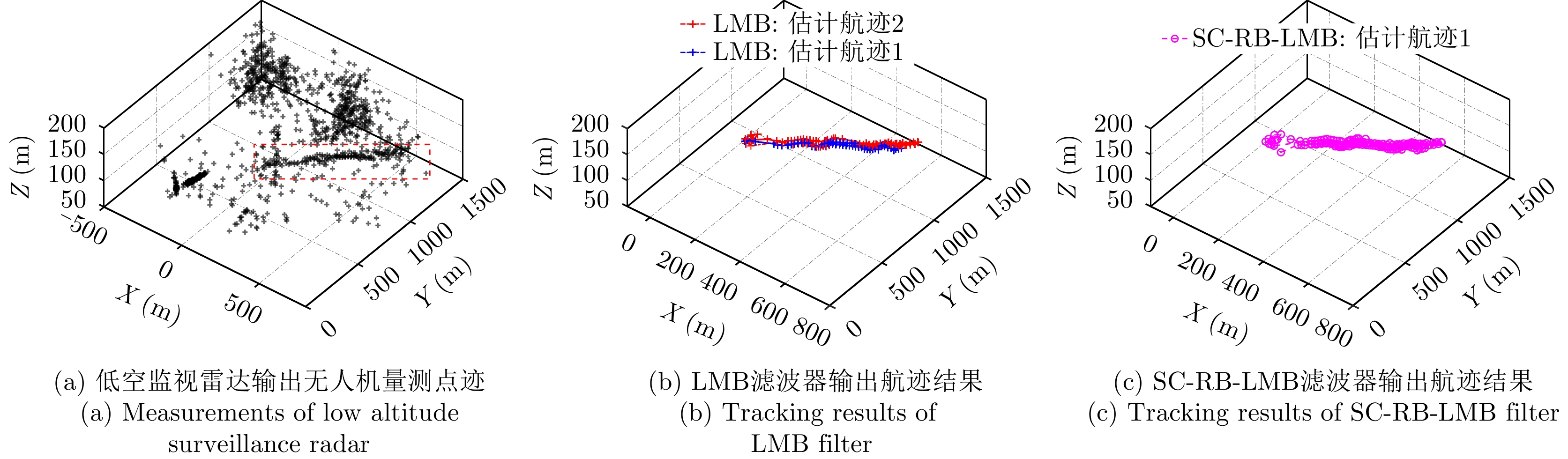
- Figure 13. Short palindrome path of the UAV- tracking performance comparison