
 Submit Manuscript
Submit Manuscript Peer Review
Peer Review Editor Work
Editor Work- Home
- Articles & Issues
-
Data
- Dataset of Radar Detecting Sea
- SAR Dataset
- SARGroundObjectsTypes
- SARMV3D
- AIRSAT Constellation SAR Land Cover Classification Dataset
- 3DRIED
- UWB-HA4D
- LLS-LFMCWR
- FAIR-CSAR
- MSAR
- SDD-SAR
- FUSAR
- SpaceborneSAR3Dimaging
- Sea-land Segmentation
- SAR Multi-domain Ship Detection Dataset
- SAR-Airport
- Hilly and mountainous farmland time-series SAR and ground quadrat dataset
- SAR images for interference detection and suppression
- HP-SAR Evaluation & Analytical Dataset
- GDHuiYan-ATRNet
- Multi-System Maritime Low Observable Target Dataset
- DatasetinthePaper
- DatasetintheCompetition
- Report
- Course
- About
- Publish
- Editorial Board
- Chinese
| Citation: | PANG Lei, ZHANG Fengli, WANG Guojun, et al. Imaging simulation and damage assessment feature analysis of Ku band polarized SAR of buildings[J]. Journal of Radars, 2020, 9(3): 578–587. doi: 10.12000/JR20061

|
Imaging Simulation and Damage Assessment Feature Analysis of Ku Band Polarized SAR of Buildings
DOI: 10.12000/JR20061 CSTR: 32380.14.JR20061
More Information-
Abstract
Building damage assessment is important in disaster emergency monitoring. In recent years, with the increase of multi-polarization capability of Synthetic Aperture Radar (SAR), Polarimetric Synthetic Aperture Radar (PolSAR) provides more possibilities for building damage assessment, and the polarization-characteristic-based building damage assessment method has gradually become the focus of research. However, because of the limitations of data acquisition in PolSAR, current research mainly focuses on the L, C, X, and other limited bands. To obtain an in depth understanding of the polarization characteristics of damaged buildings in SAR images and develop the application of the polarization characteristics of damaged buildings to other bands, this study conducted a simulation experiment of Ku band polarized SAR of buildings, and performed damage assessment feature analysis using the SAR image polarization decomposition method. In this study, a scale model of real materials was built and the “microwave characteristic measurement and simulation imaging scientific experiment platform” was used to conduct SAR simulation imaging of the target buildings. The Ku band polarized SAR images before and after building damage were obtained. Then, the polarization scattering characteristics of buildings before and after damage were analyzed using various common polarization decomposition methods such as$ {H/A/\alpha} $ decomposition, Yamaguchi decomposition and Touzi decomposition. Results show that the disoriented volume scattering component and the proportion of the disoriented secondary scattering component obtained by the Yamaguchi decomposition and the${ {\alpha }_{\rm s1}} $ component obtained by the Touzi decomposition have good indicative significance for building damage assessment in the Ku band. Compared with the X band measurement results, the Ku band is more sensitive to building damage assessment, which has important implications for future radar remote sensing applications. -

-
References
[1] Tadono T, Ohki M, and Abe T. Summary of natural disaster responses by the Advanced Land Observing Satellite-2(ALOS-2)[C]. The International Archives of the Photogrammetry, Remote Sensing & Spatial Information Sciences, Kyoto, Japan, 2019: 69–72. doi: 10.5194/isprs-archives-XLII-3-W7-69-2019.[2] 张风丽, 邵芸. 城市目标高分辨率SAR遥感监测技术研究进展[J]. 遥感技术与应用, 2010, 25(3): 415–422. doi: 10.11873/j.issn.1004-0323.2010.3.415ZHANG Fengli and SHAO Yun. Urban target monitoring using high resolution SAR data[J]. Remote Sensing Technology and Application, 2010, 25(3): 415–422. doi: 10.11873/j.issn.1004-0323.2010.3.415[3] CHEN Qihao, LI Linlin, JIANG Ping, et al. Building collapse extraction using modified freeman decomposition from post-disaster polarimetric SAR image[C]. 2016 IEEE International Geoscience And Remote Sensing Symposium (IGARSS), Beijing, China, 2016: 5769–5772. doi: 10.1109/IGARSS.2016.7730507.[4] WANG Xiaoqing, DOU Aixia, JIN Dingjian, et al. Study on the comparation of building damage extracted from different RS images acquired after 2010 M = 7.1 Yushu, Qinghai, China earthquake[C]. 2012 IEEE International Geoscience and Remote Sensing Symposium, Munich, Germany, 2012: 935–938. doi: 10.1109/IGARSS.2012.6351401.[5] ZHANG Haizhen, WANG Qing, ZENG Qiming, et al. A novel approach to building collapse detection from post-seismic polarimetric SAR imagery by using optimization of polarimetric contrast enhancement[C]. 2015 IEEE International Geoscience And Remote Sensing Symposium (IGARSS), Milan, Italy, 2015: 3270–3273. doi: 10.1109/IGARSS.2015.7326516.[6] PARK S E, YAMAGUCHI Y, and KIM D J. Polarimetric SAR remote sensing of the 2011 Tohoku earthquake using ALOS/PALSAR[J]. Remote sensing of Environment, 2013, 132: 212–220. doi: 10.1016/j.rse.2013.01.018[7] ZHAI Wei, SHEN Huanfeng, HUANG Chunlin, et al. Building earthquake damage information extraction from a single post-earthquake PolSAR image[J]. Remote Sensing, 2016, 8(3): 171. doi: 10.3390/rs8030171[8] SATO M, CHEN Siwei, and SATAKE M. Polarimetric SAR analysis of tsunami damage following the March 11, 2011 East Japan earthquake[J]. Proceedings of the IEEE, 2012, 100(10): 2861–2875. doi: 10.1109/JPROC.2012.2200649[9] WATANABE M, MOTOHKA T, MIYAGI Y, et al. 2012. Analysis of urban areas affected by the 2011 off the pacific coast of Tohoku earthquake and tsunami with L-Band SAR full-polarimetric mode[J]. IEEE Geoscience and Remote Sensing Letters, 2012, 9(3): 472–476. doi: 10.1109/LGRS.2011.2182030[10] ZHAI Wei and HUANG Chunlin. Fast building damage mapping using a single post-earthquake PolSAR image: A case study of the 2010 Yushu earthquake[J]. Earth, Planets and Space, 2016, 68(1): 86. doi: 10.1186/s40623-016-0469-2[11] ZHAI Wei, HUANG Chunlin, and PEI Wansheng. Two new polarimetric feature parameters for the recognition of the different kinds of buildings in earthquake-stricken areas based on entropy and eigenvalues of PolSAR decomposition[J]. Remote Sensing, 2018, 10(10): 1613. doi: 10.3390/rs10101613[12] LI Xinwu, GUO Huadong, ZHANG Lu, et al. A new approach to collapsed building extraction using RADARSAT-2 polarimetric SAR imagery[J]. IEEE Geoscience and Remote Sensing Letters, 2012, 9(4): 677–681. doi: 10.1109/LGRS.2011.2178392[13] SUN Weidong, SHI Lei, YANG Jie, et al. Building collapse assessment in urban areas using texture information from postevent SAR data[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2016, 9(8): 3792–3808. doi: 10.1109/JSTARS.2016.2580610[14] ZHAO Lingli, YANG Jie, LI Pingxiang, et al. Damage assessment in urban areas using post-earthquake airborne PolSAR imagery[J]. International Journal of Remote Sensing, 2013, 34(24): 8952–8966. doi: 10.1080/01431161.2013.860566[15] GE Pinglan, GOKON H, and MEGURO K. A review on synthetic aperture radar-based building damage assessment in disasters[J]. Remote Sensing of Environment, 2020, 240: 111693. doi: 10.1016/j.rse.2020.111693[16] CHEN Siwei, WANG Xuesong, and SATO M. Urban damage level mapping based on scattering mechanism investigation using fully polarimetric SAR data for the 3.11 East Japan earthquake[J]. IEEE Transactions on Geoscience and Remote Sensing, 2016, 54(12): 6919–6929. doi: 10.1109/TGRS.2016.2588325[17] 王雪松, 陈思伟. 合成孔径雷达极化成像解译识别技术的进展与展望[J]. 雷达学报, 2020, 9(2): 259–276. doi: 10.12000/JR19109WANG Xuesong and CHEN Siwei. Polarimetric synthetic aperture radar interpretation and recognition: Advances and perspectives[J]. Journal of Radars, 2020, 9(2): 259–276. doi: 10.12000/JR19109[18] FREEMAN A and DURDEN S L. A three-component scattering model for polarimetric SAR data[J]. IEEE Transactions on Geoscience and Remote Sensing, 1998, 36(3): 963–973. doi: 10.1109/36.673687[19] YAMAGUCHI Y, SATO A, BOERNER W M, et al. Four-component scattering power decomposition with rotation of coherency matrix[J]. IEEE Transactions on Geoscience and Remote Sensing, 2011, 49(6): 2251–2258. doi: 10.1109/TGRS.2010.2099124[20] JI Kefeng and WU Yonghui. Scattering mechanism extraction by a modified cloude-pottier decomposition for dual polarization SAR[J]. Remote Sensing, 2015, 7(6): 7447–7470. doi: 10.3390/rs70607447[21] CHIEN L L C, EWE H T, and SAW S H. Understanding the correlation in scattering mechanisms between H-Alpha decomposition and theoretical modelling[C]. 2018 Progress in Electromagnetics Research Symposium (PIERS-Toyama), Toyama, Japan, 2018: 1198–1203. doi: 10.23919/PIERS.2018.8597662.[22] TOUZI R. Target scattering decomposition in terms of roll-invariant target parameters[J]. IEEE Transactions on Geoscience and Remote Sensing, 2007, 45(1): 73–84. doi: 10.1109/TGRS.2006.886176[23] AN Wentao, XIE Chunhua, YUAN Xinzhe, et al. Four-component decomposition of polarimetric SAR images with deorientation[J]. IEEE Geoscience and Remote Sensing Letters, 2011, 8(6): 1090–1094. doi: 10.1109/LGRS.2011.2157078[24] 孙翔, 宋红军, 王宇, 等. 基于高分辨率全极化SAR图像的取向角校正方法[J]. 雷达学报, 2018, 7(4): 465–474. doi: 10.12000/JR18026SUN Xiang, SONG Hongjun, WANG R, et al. POA correction method using high-resolution full-polarization SAR image[J]. Journal of Radars, 2018, 7(4): 465–474. doi: 10.12000/JR18026[25] LIU Shan, ZHANG Fengli, WEI Shiying, et al. Building damage mapping based on Touzi decomposition using quad-polarimetric ALOS PALSAR data[J]. Frontiers of Earth Science, 2020: 1–12. doi: 10.1007/s11707-019-0779-3 -
Proportional views



- Publishing Ethics
- Journal Insights
- Abstracting & Indexing
- Peer Review Policies
- Guide for Authors
- Conference
- ISSN 2095-283X (Print)ISSN 2097-339X (Online)
- CN 10-1030/TN
- CODEN LXEUAO
About Journal
- Sponsor: China Radio Detection and Ranging Industry Association (CRIA)
- Phone: 010-58887062
- Email:radars@aircas.ac.cn
- Publisher: Leida Xuebao Bianjibu (Editorial office of the Journal of Radars)
Contacts Us

京ICP备20021838号-14
Supported by: Beijing Renhe Information Technology Co. Ltd

Export File
Citation
Format
Content
 DownLoad:
DownLoad:





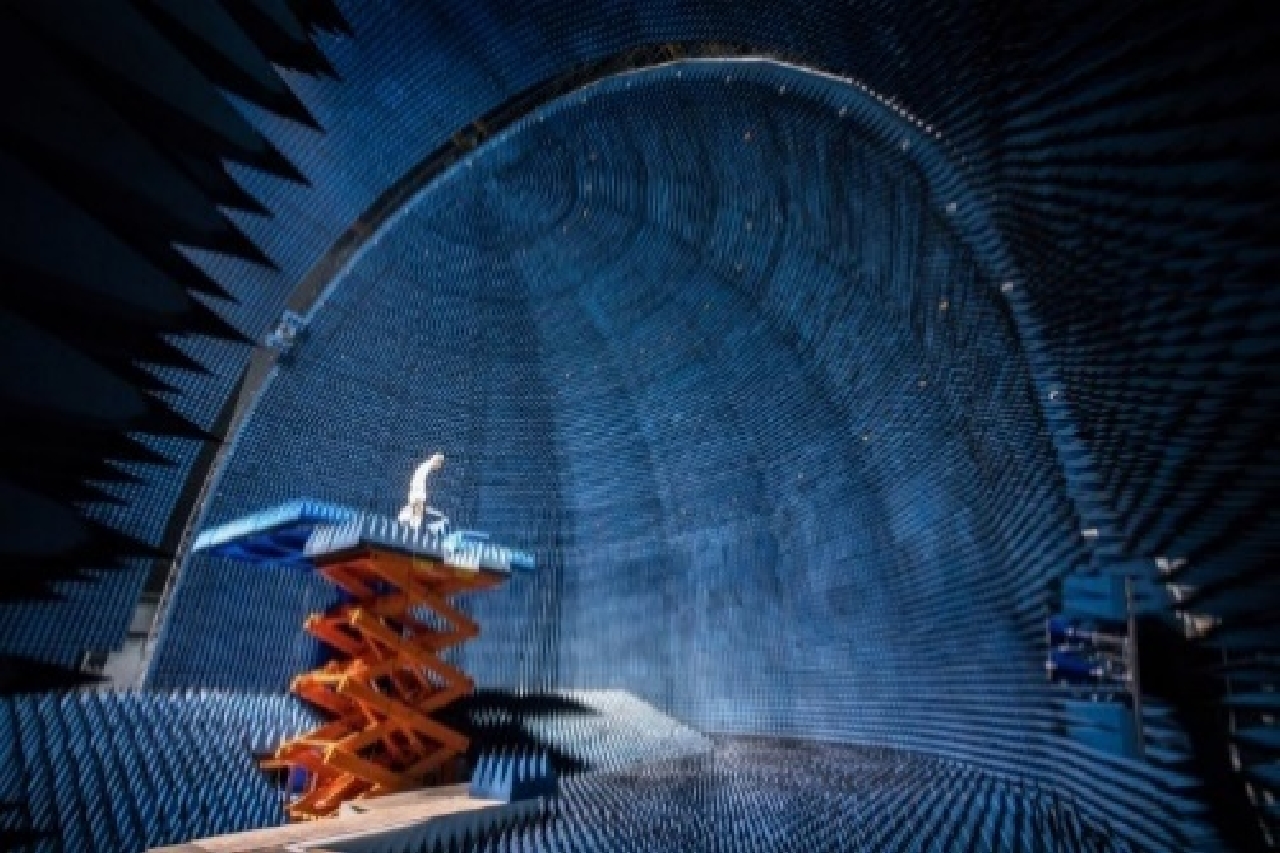
- Figure 1. Microwave characteristic measurement and simulation imaging science experiment platform interior view
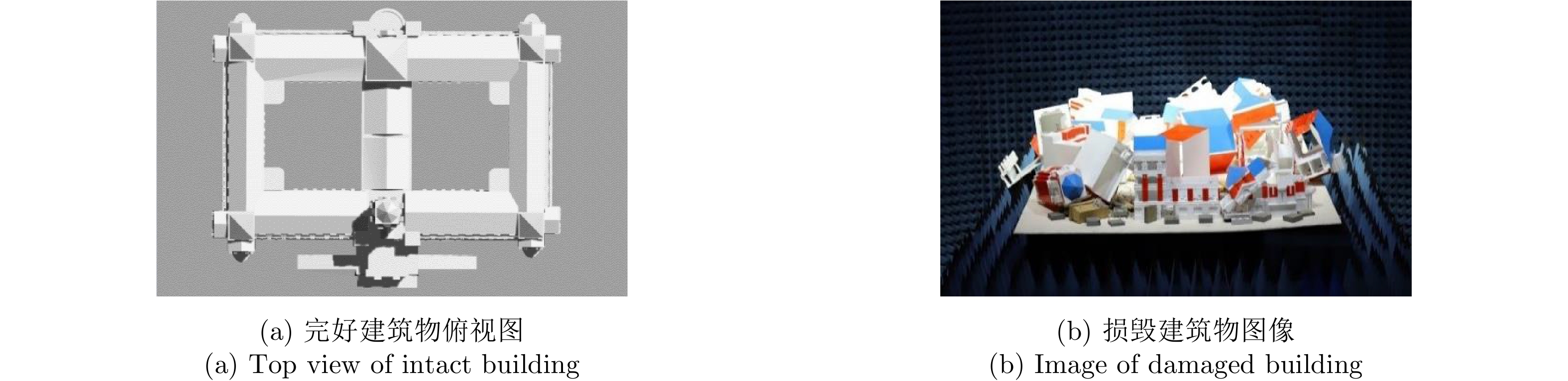
- Figure 2. Scale model of intact and damaged buildings (1:50)
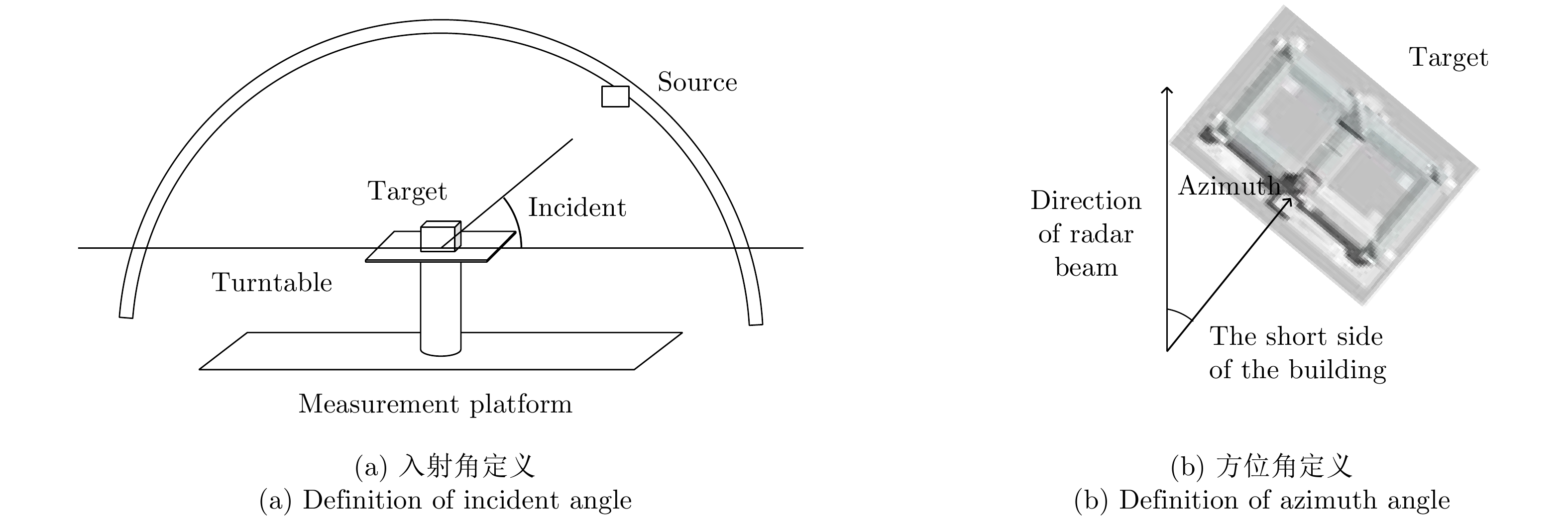
- Figure 3. Definition of incidence angle and azimuth angle
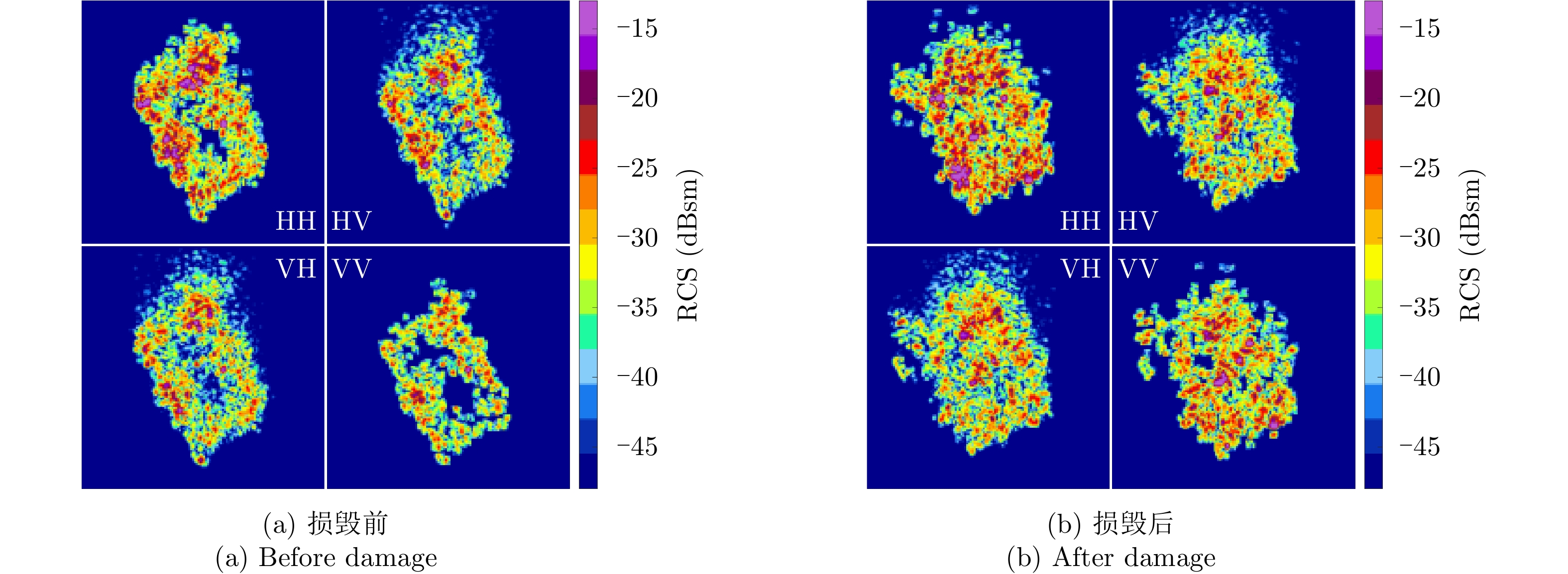
- Figure 4. Comparison of measurement results of 0° azimuth angle
- Figure 5. Comparison of measurement results of 30° azimuth angle
- Figure 6. Comparison of measurement results of 60° azimuth angle
- Figure 7. Distribution of Vol before and after disoriented
-
Figure 8. Distribution of
${R_{\rm s}}$ -
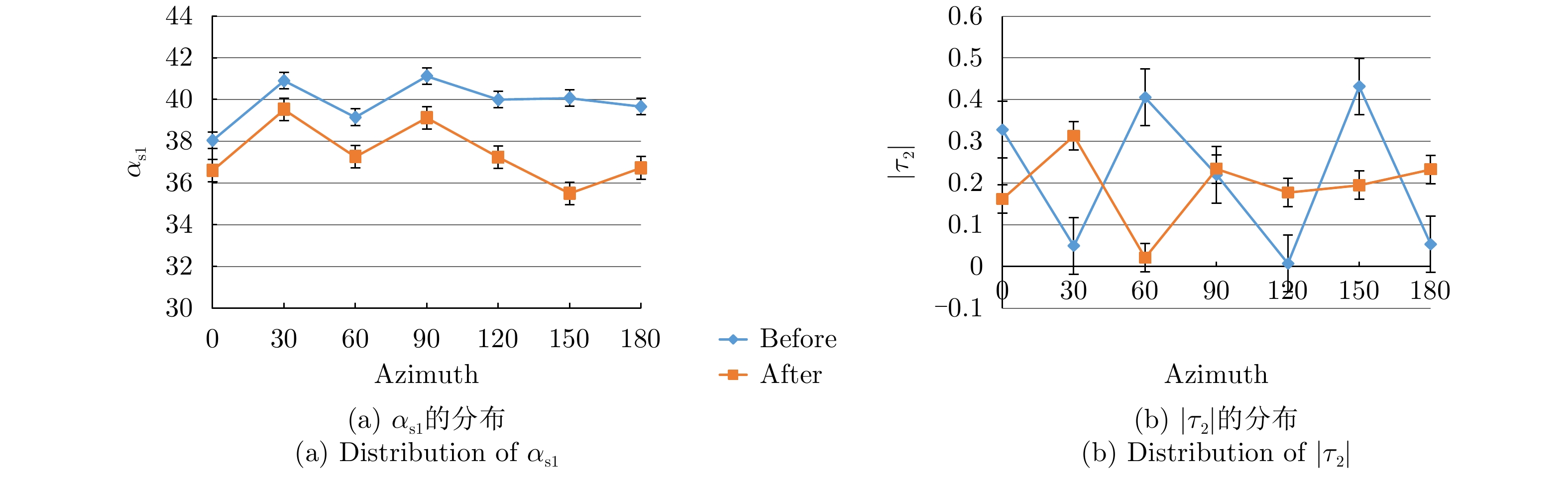
Figure 9. Distribution of
${\alpha _{{\rm{s}}1}}$ $\left| {{\tau _2}} \right|$ -
Figure 10. Distribution of Vol,
${R_{\rm s}}$ ${\alpha _{{\rm{s}}1}}$