
 Submit Manuscript
Submit Manuscript Peer Review
Peer Review Editor Work
Editor Work2024 Vol. 13, No. 6
 Previous Issue
Previous Issue
2024, 13(6): 1135-1156.
 Abstract
Abstract 1881KB
1881KB
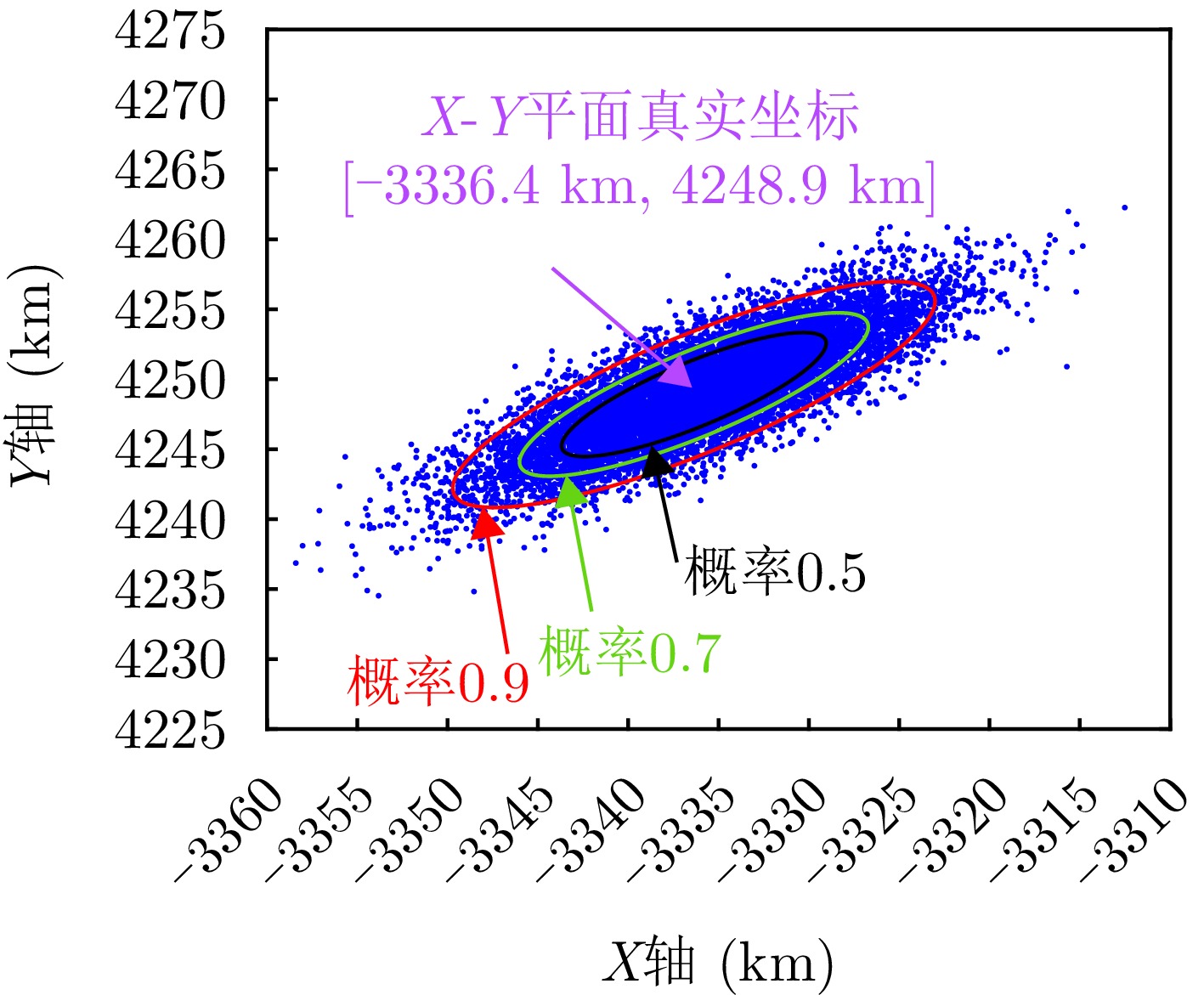
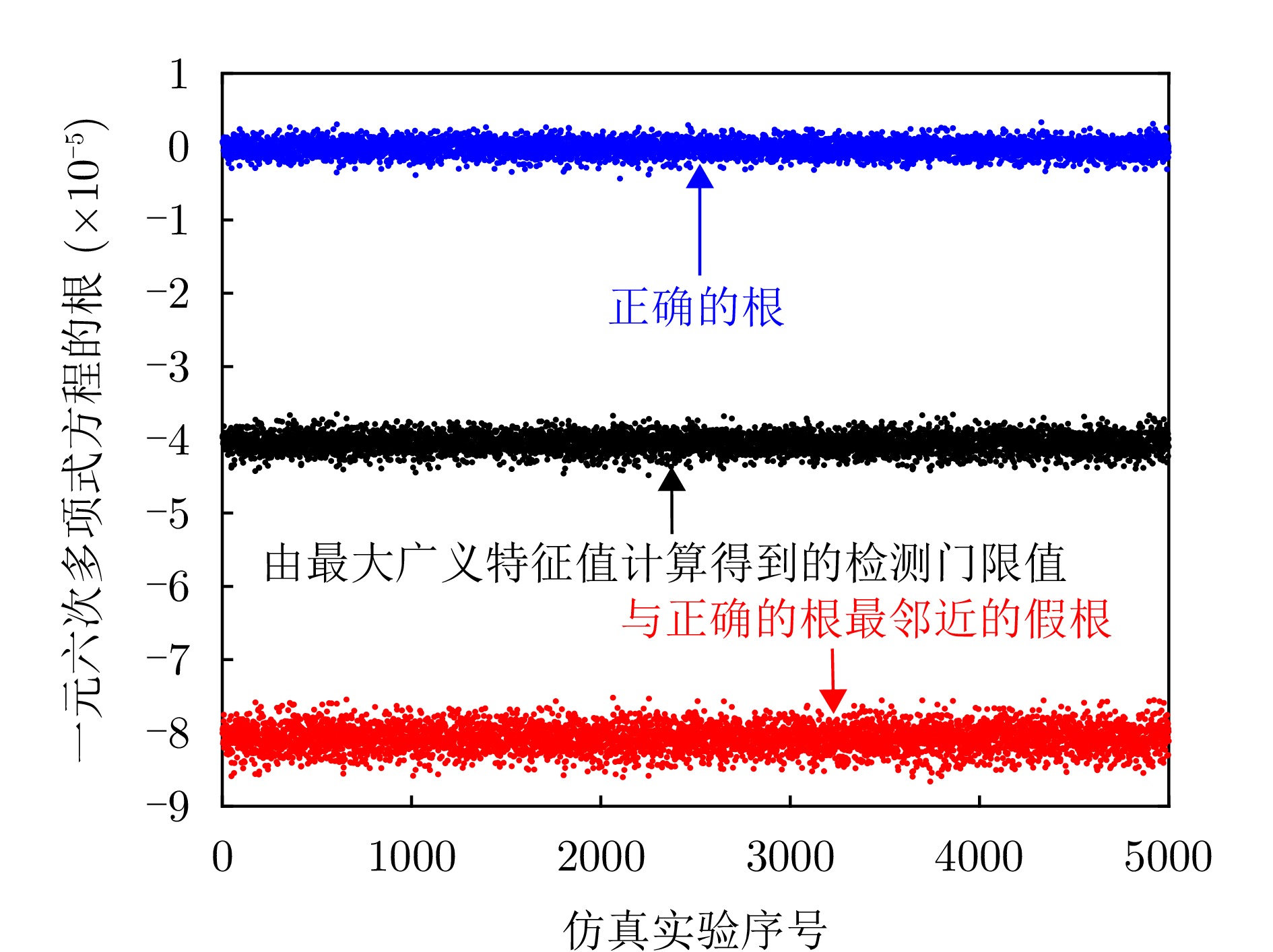
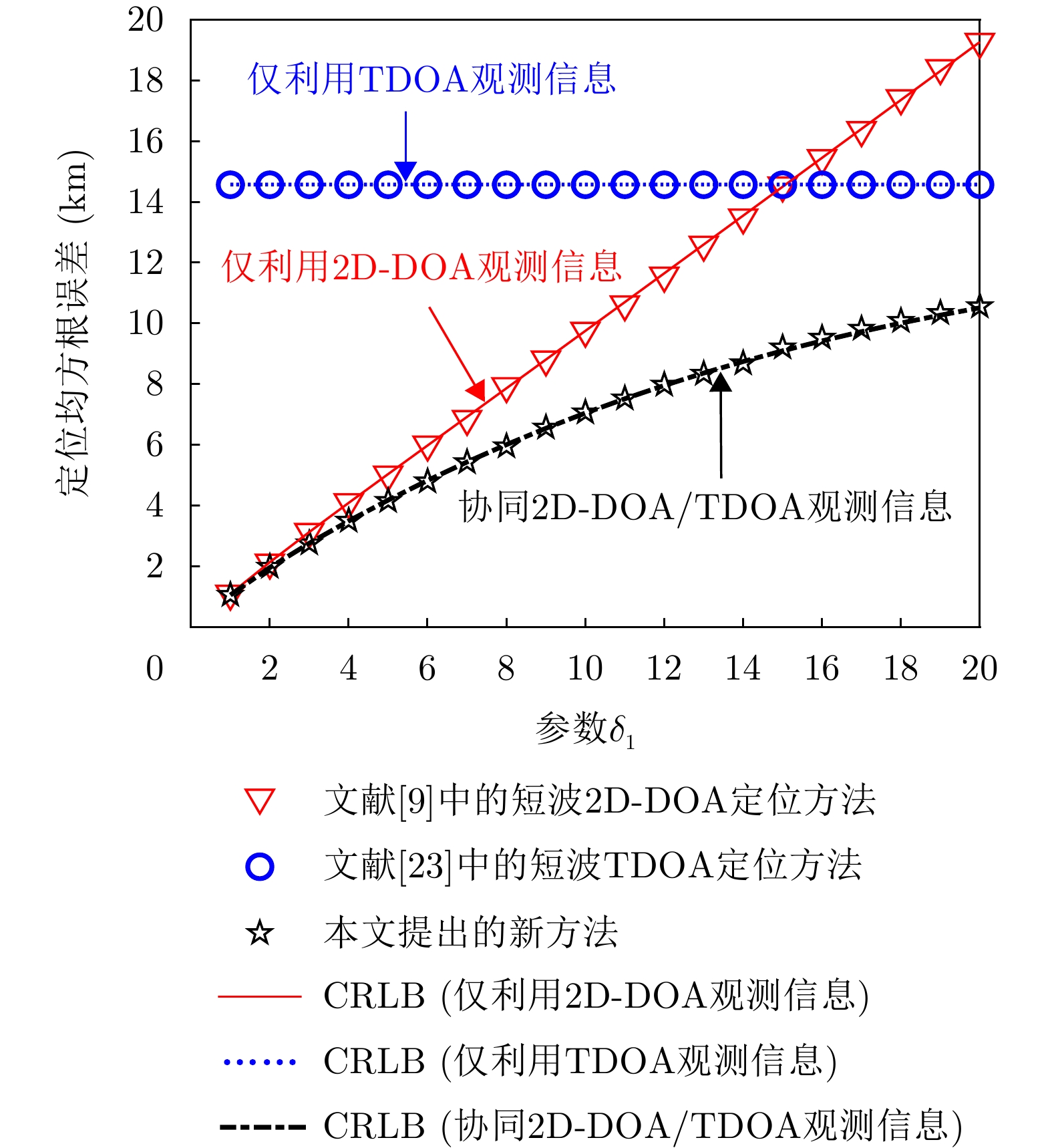
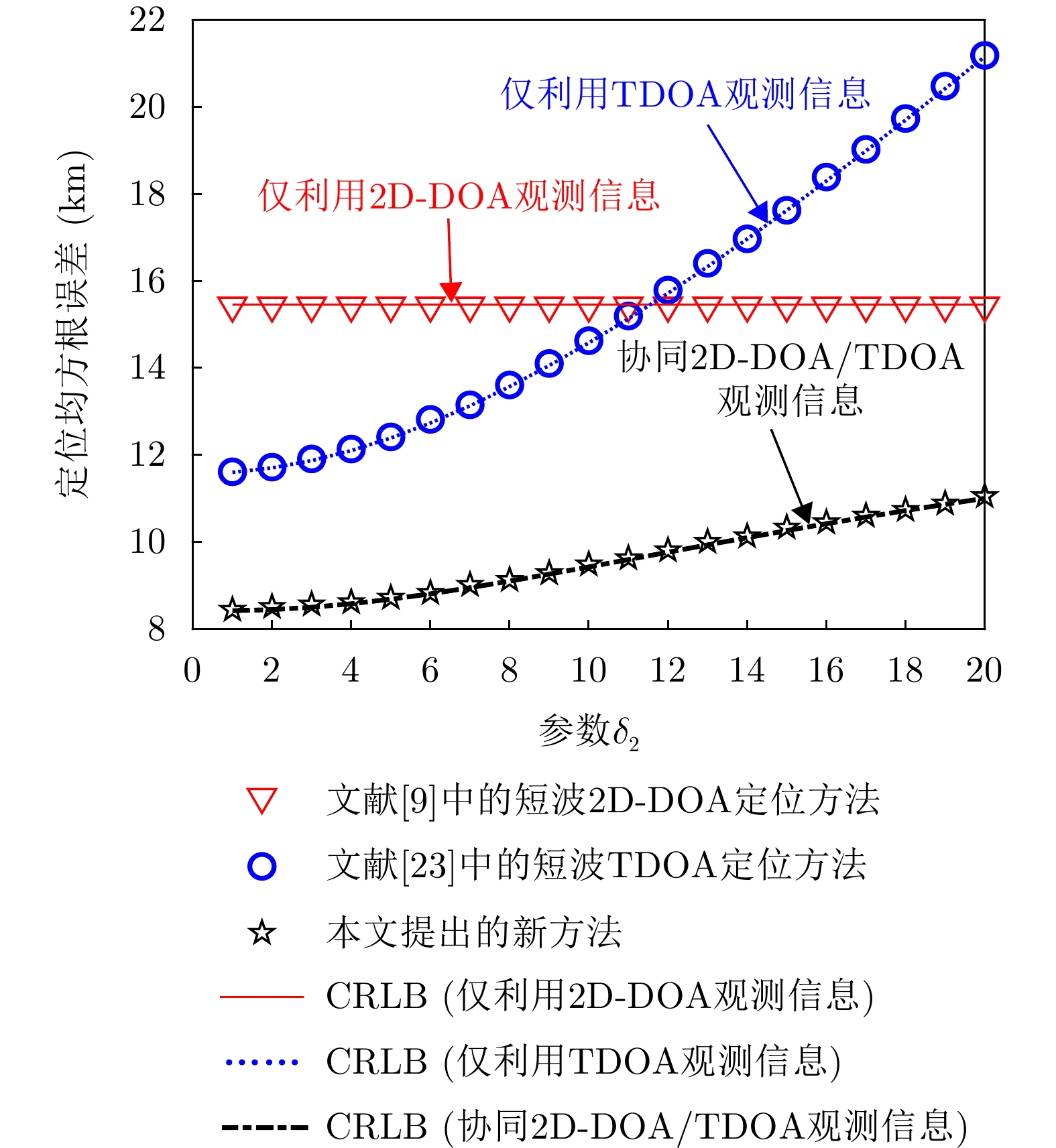
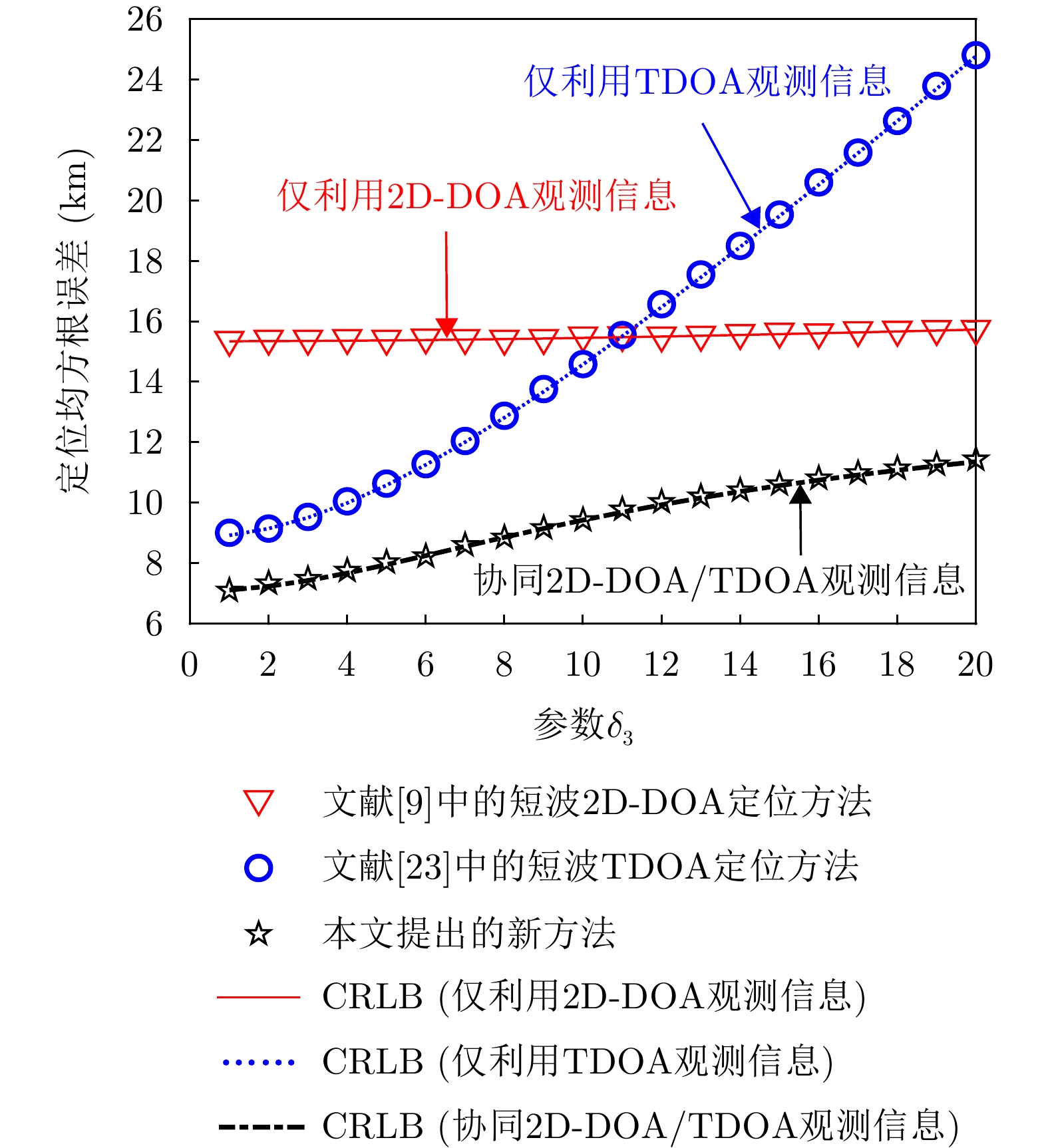
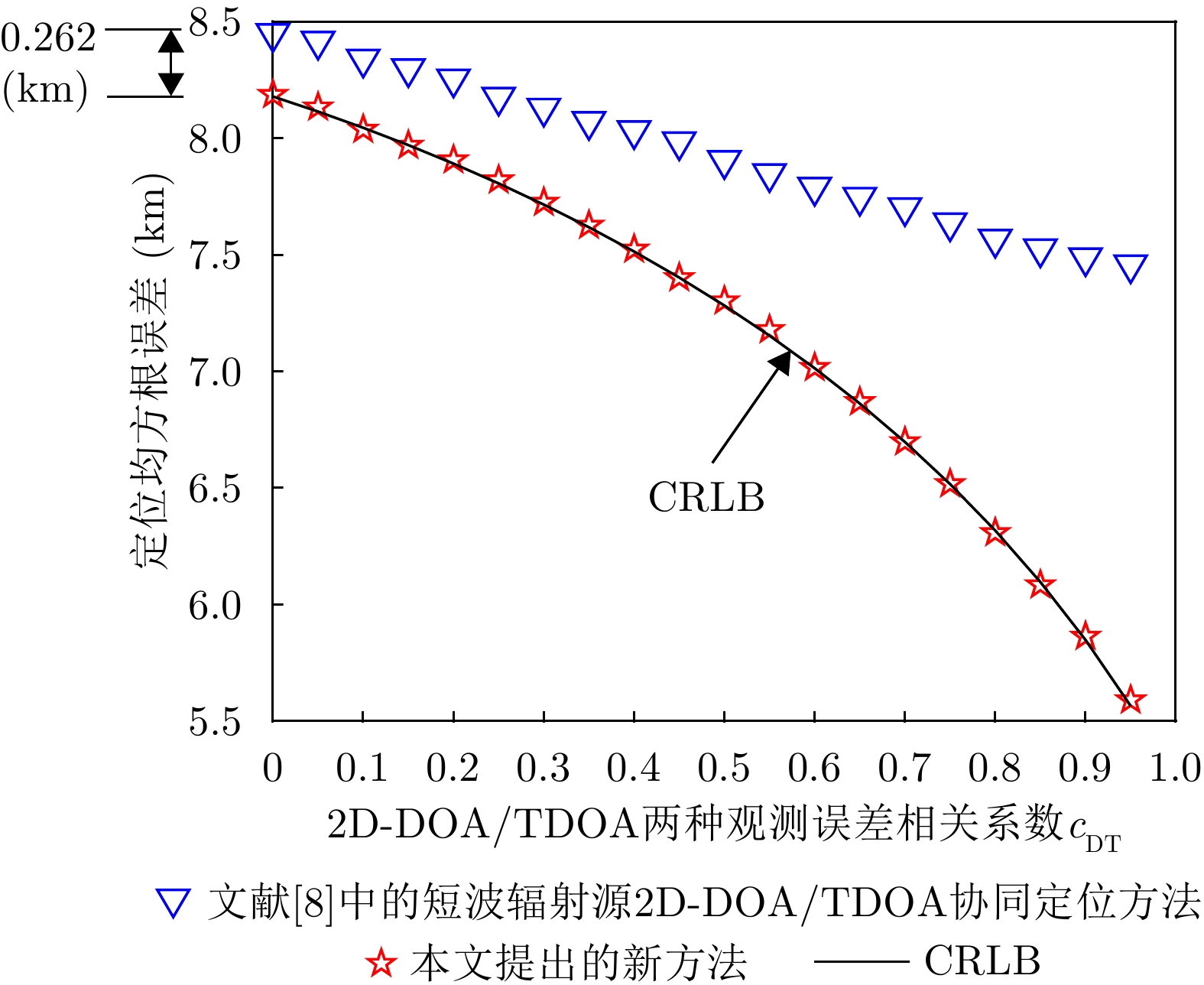
To reduce the large over-the-horizon localization errors of long-range shortwave emitter, a novel cooperative positioning method is proposed. This method combines two-Dimensional (2D) Direction-Of-Arrival (DOA) and Time-Difference-Of-Arrival (TDOA) measurements under scenarios in which observation stations can simultaneously obtain the two types of parameters. Initially, based on the single-hop ionospheric virtual height model, the nonlinear measurement models of 2D DOA and TDOA are established for over-the-horizon shortwave localization. Subsequently, by combining the over-the-horizon localization geometric and algebraic model, the two types of nonlinear measurement equations are successively transformed into the corresponding pseudo-linear measurement equations. On this basis, a novel two-stage cooperative positioning method is proposed without iteration. In the first stage, the closed-form solution of the target position vector is obtained by solving the roots of a sixth-order polynomial. In the second stage, an equality-constrained optimization problem is established to refine the localization result obtained in the first stage, yielding a more accurate target position estimate using the Lagrange multiplier technique. In addition, the estimation performance of the proposed cooperative positioning method is theoretically analyzed based on the constrained error perturbation theory, and the asymptotic efficiency of the new estimator is proved. Meanwhile, the influence of the altitude information error of the emitter on the positioning accuracy is quantitatively analyzed by applying the theory of constrained error perturbation, and the maximum threshold value of this error, which ensures that the constrained solution remains better than the unconstrained one, is deduced. Simulation results show that the newly proposed method can achieve significant cooperative gain.
To reduce the large over-the-horizon localization errors of long-range shortwave emitter, a novel cooperative positioning method is proposed. This method combines two-Dimensional (2D) Direction-Of-Arrival (DOA) and Time-Difference-Of-Arrival (TDOA) measurements under scenarios in which observation stations can simultaneously obtain the two types of parameters. Initially, based on the single-hop ionospheric virtual height model, the nonlinear measurement models of 2D DOA and TDOA are established for over-the-horizon shortwave localization. Subsequently, by combining the over-the-horizon localization geometric and algebraic model, the two types of nonlinear measurement equations are successively transformed into the corresponding pseudo-linear measurement equations. On this basis, a novel two-stage cooperative positioning method is proposed without iteration. In the first stage, the closed-form solution of the target position vector is obtained by solving the roots of a sixth-order polynomial. In the second stage, an equality-constrained optimization problem is established to refine the localization result obtained in the first stage, yielding a more accurate target position estimate using the Lagrange multiplier technique. In addition, the estimation performance of the proposed cooperative positioning method is theoretically analyzed based on the constrained error perturbation theory, and the asymptotic efficiency of the new estimator is proved. Meanwhile, the influence of the altitude information error of the emitter on the positioning accuracy is quantitatively analyzed by applying the theory of constrained error perturbation, and the maximum threshold value of this error, which ensures that the constrained solution remains better than the unconstrained one, is deduced. Simulation results show that the newly proposed method can achieve significant cooperative gain.



2024, 13(6): 1157-1169.
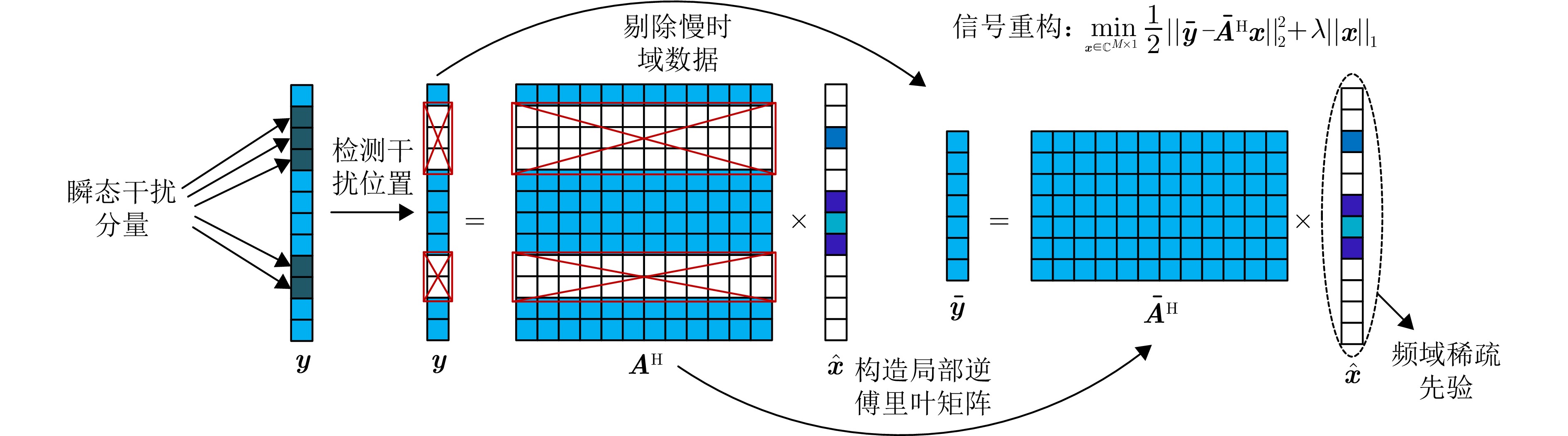
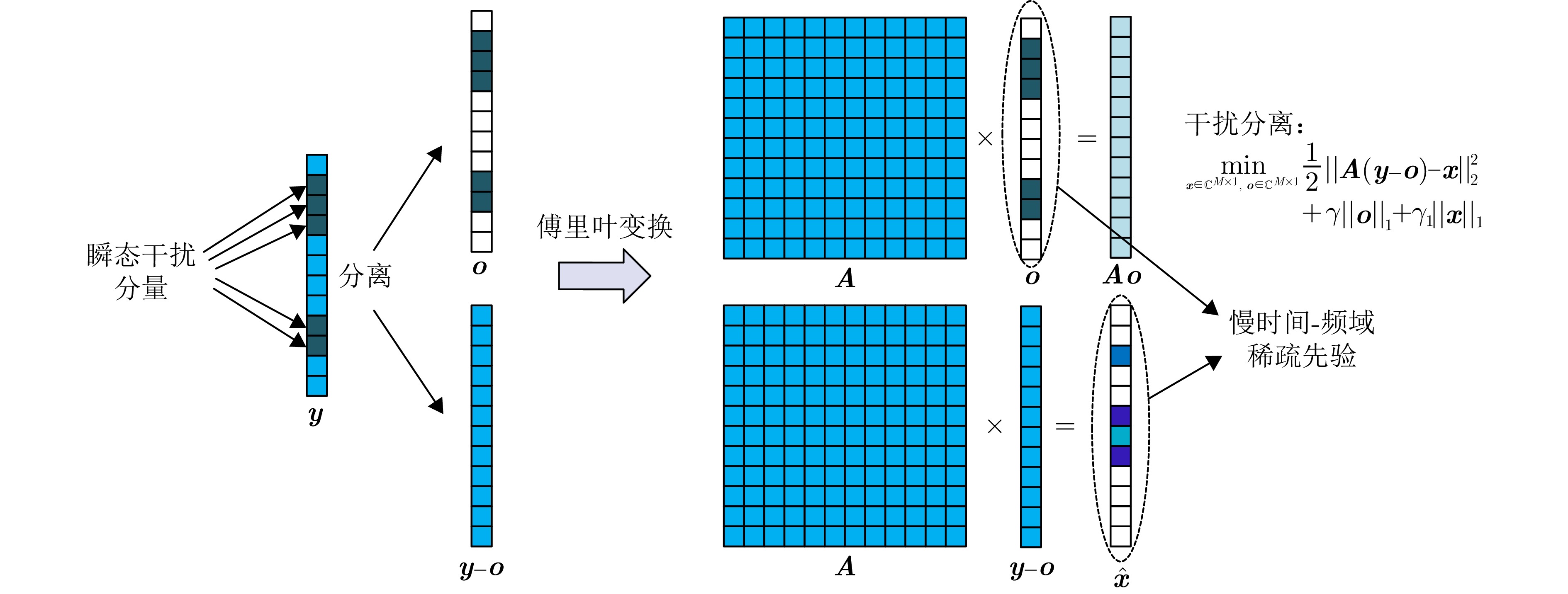
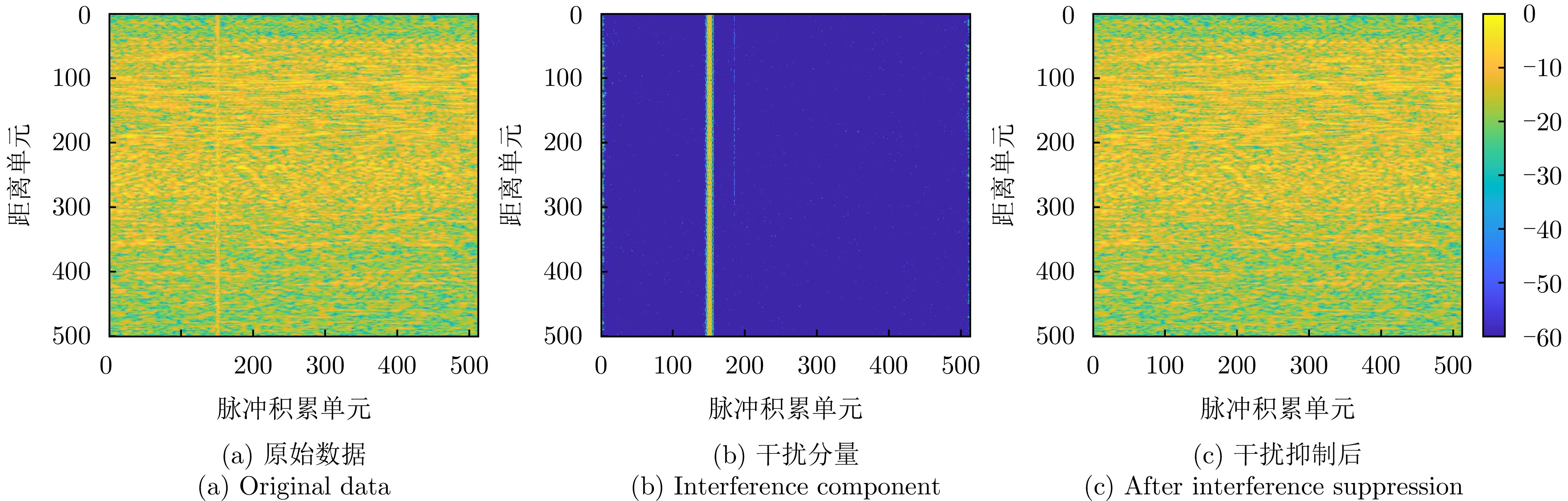
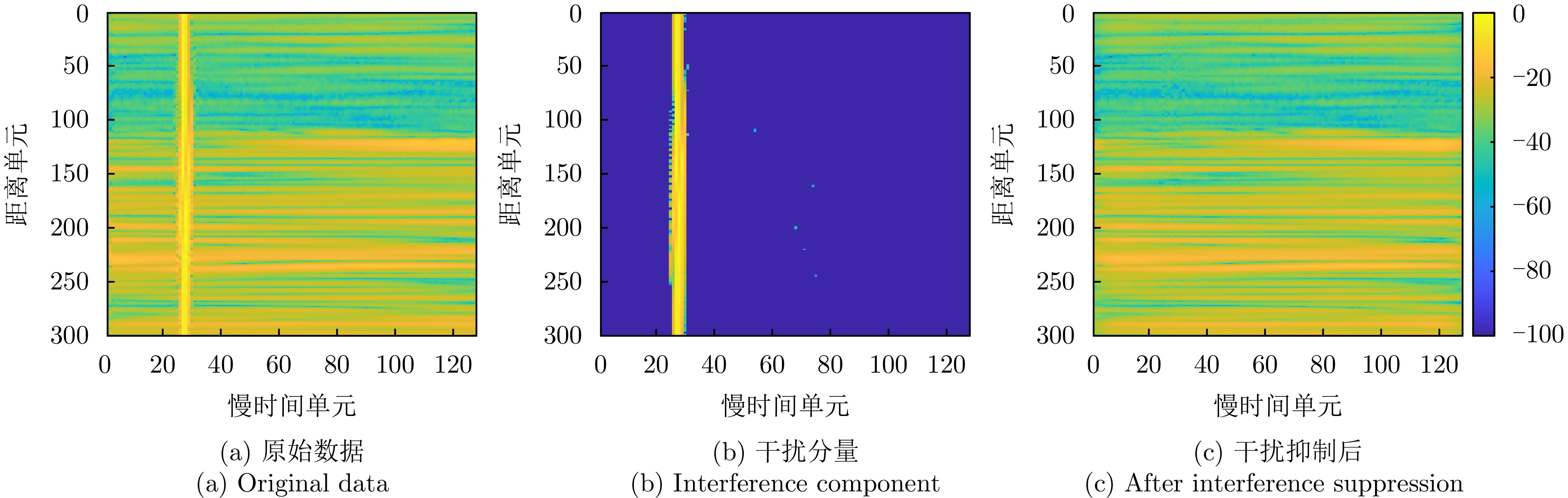
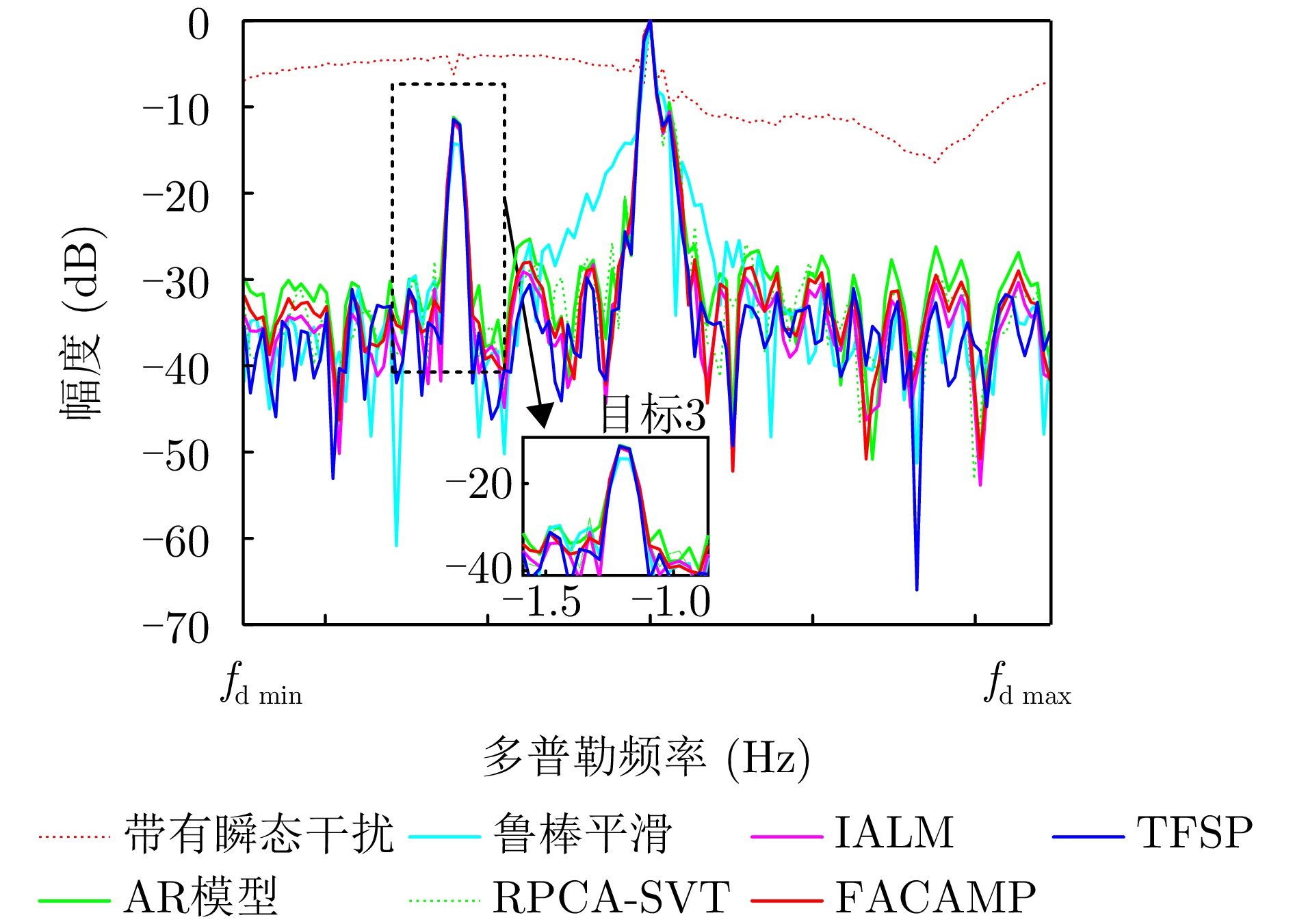
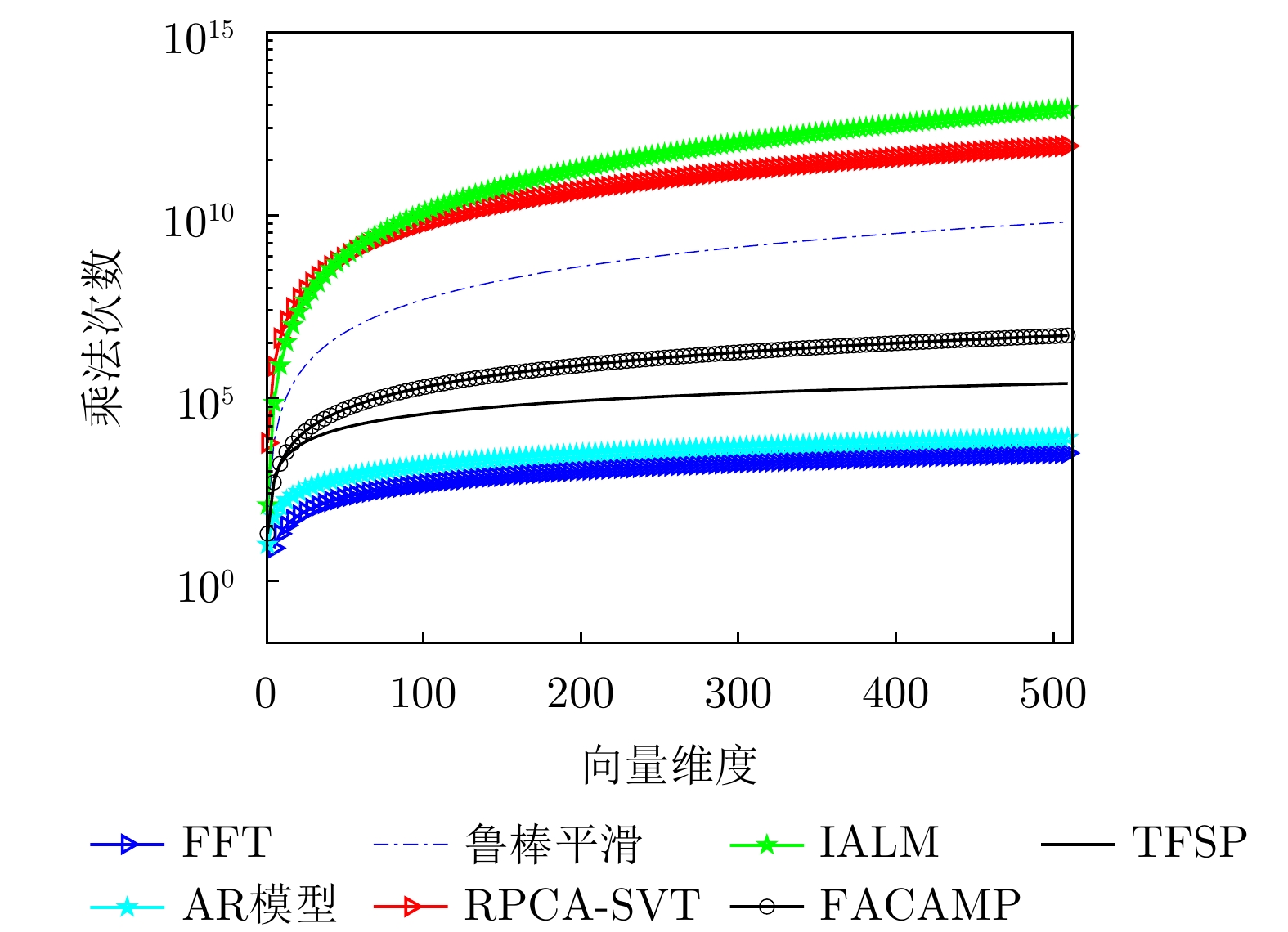
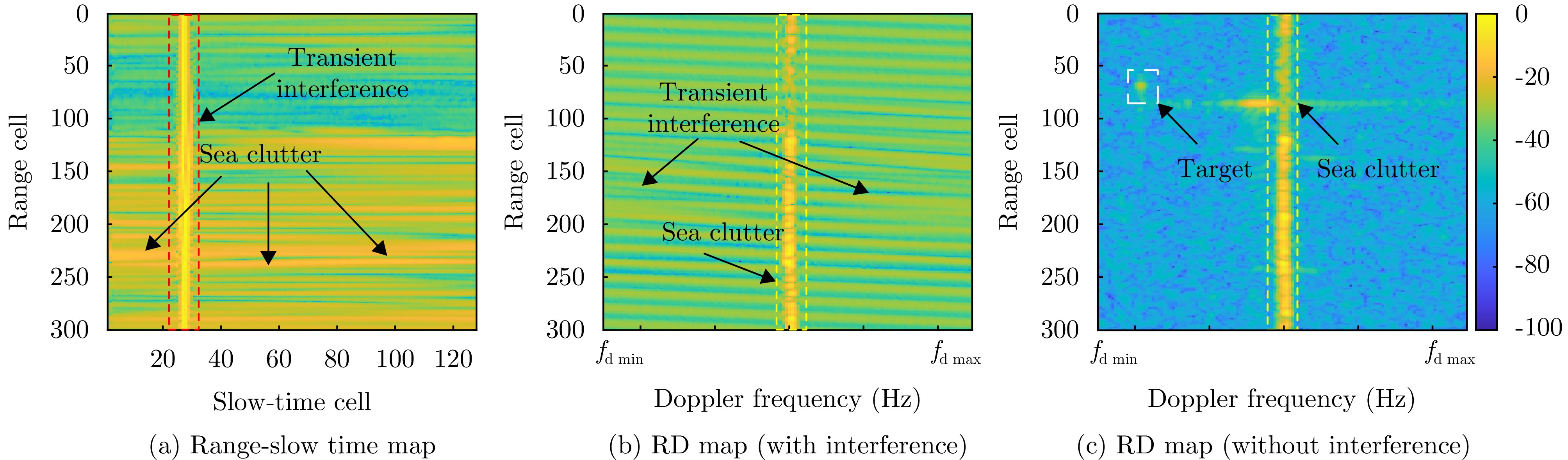
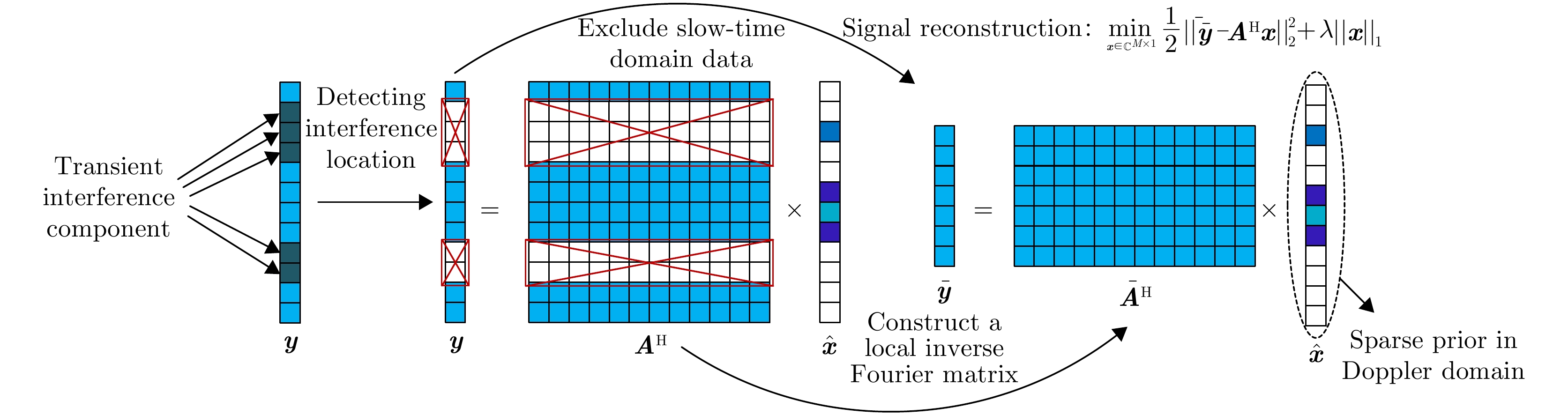
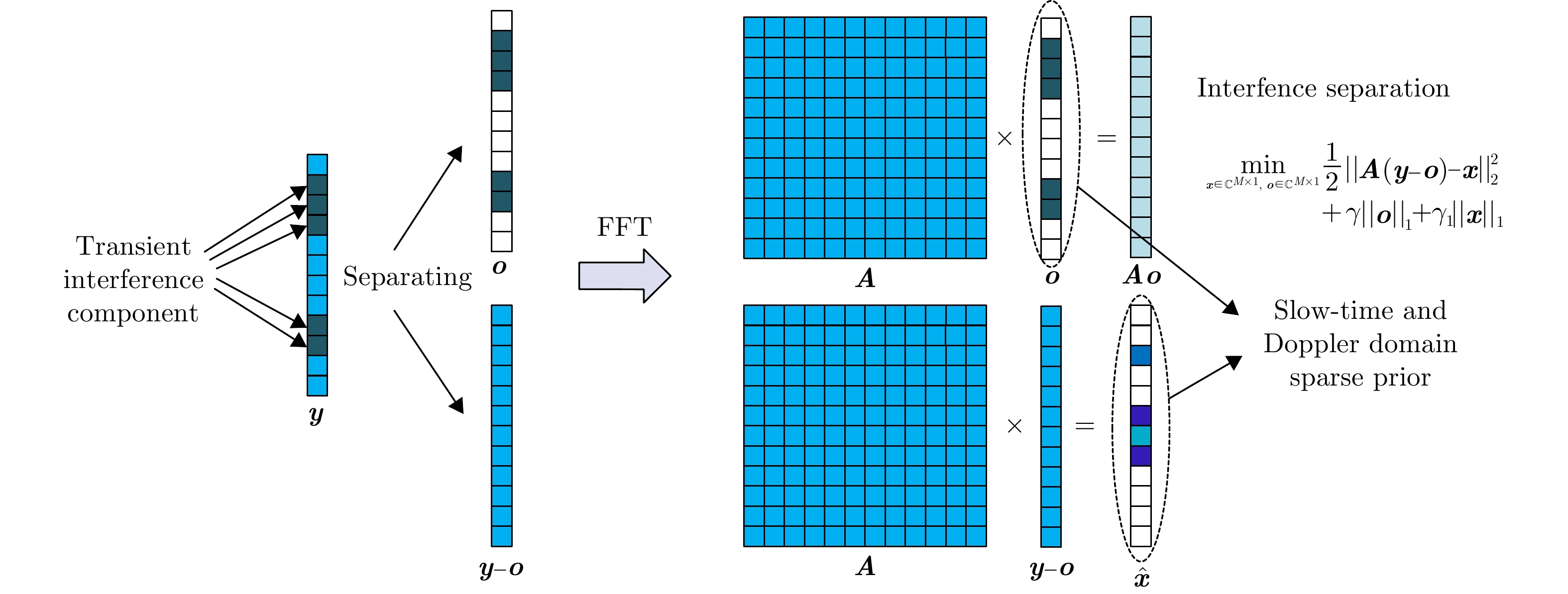
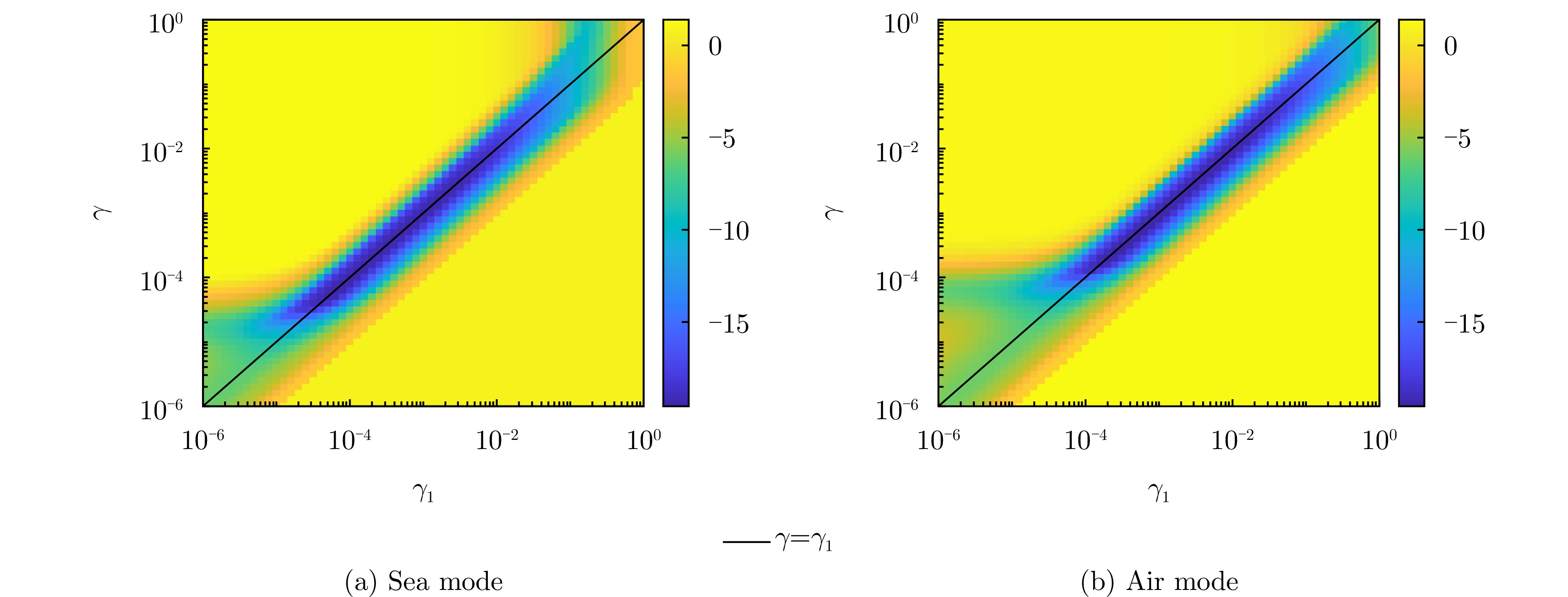
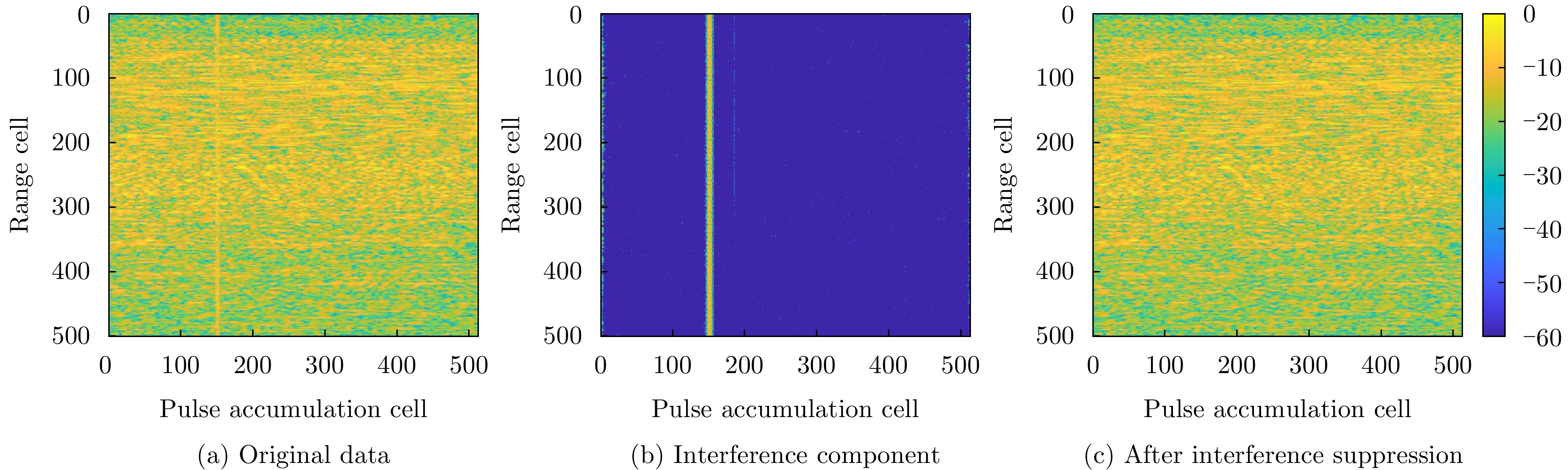
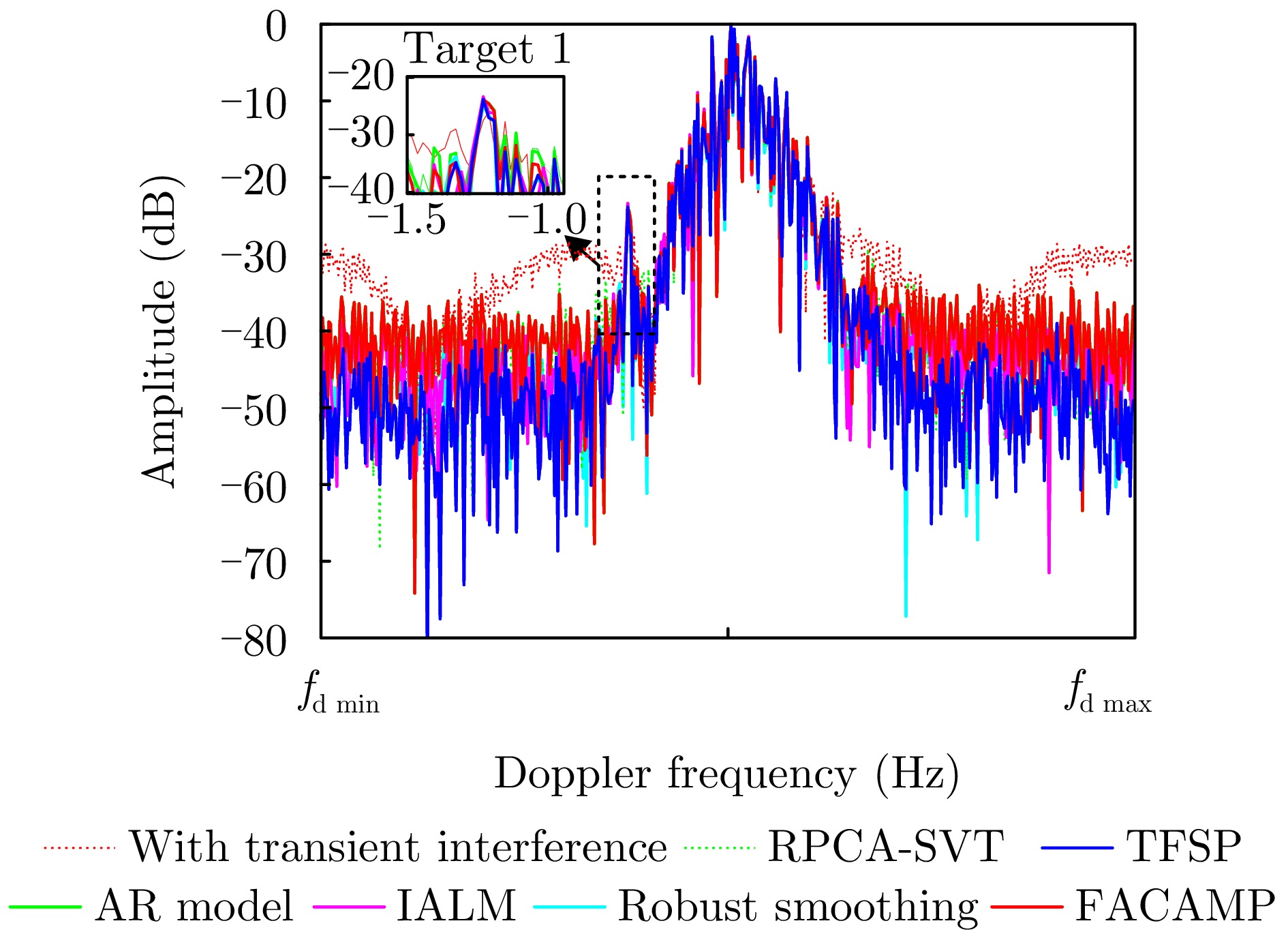
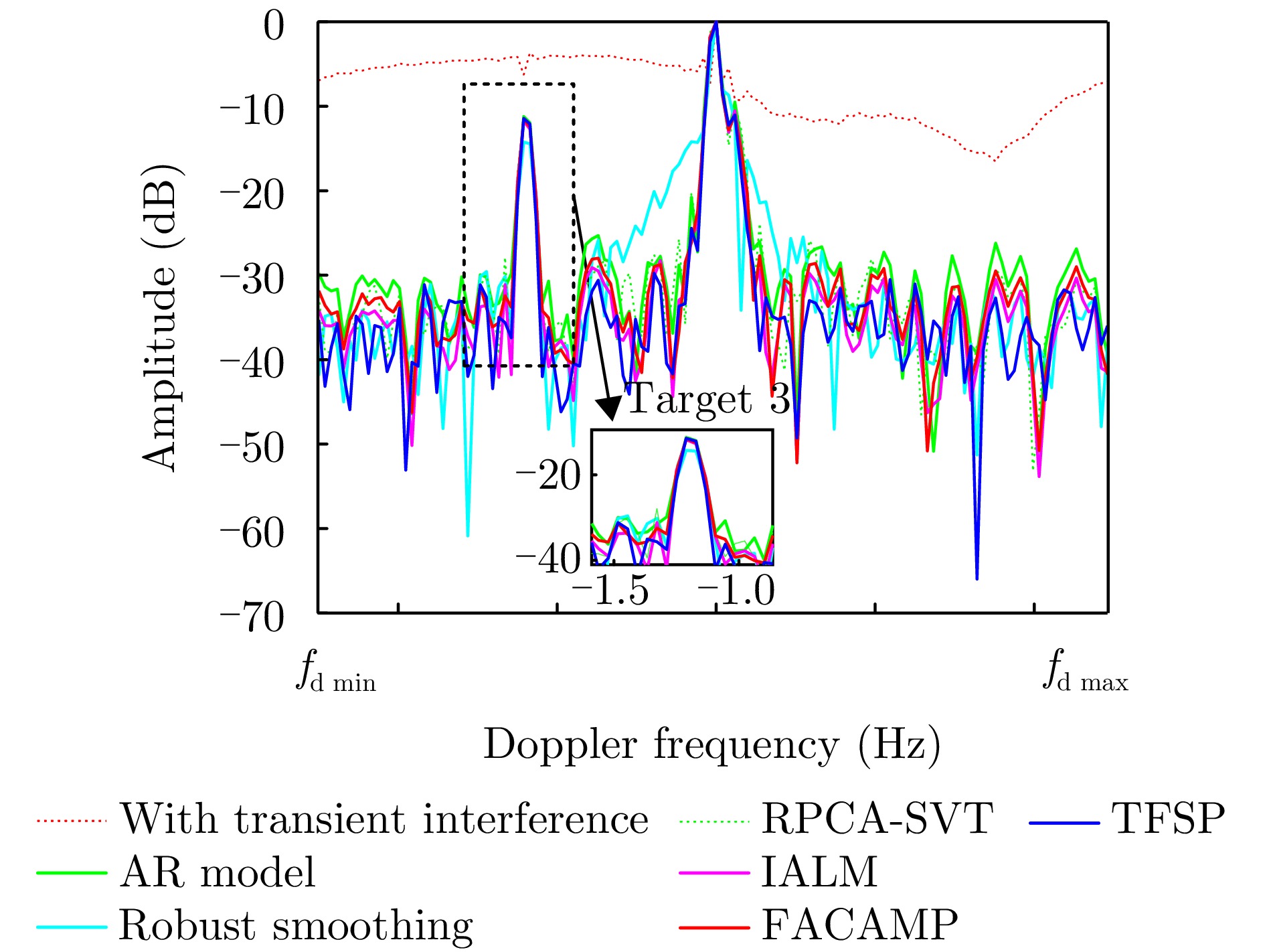
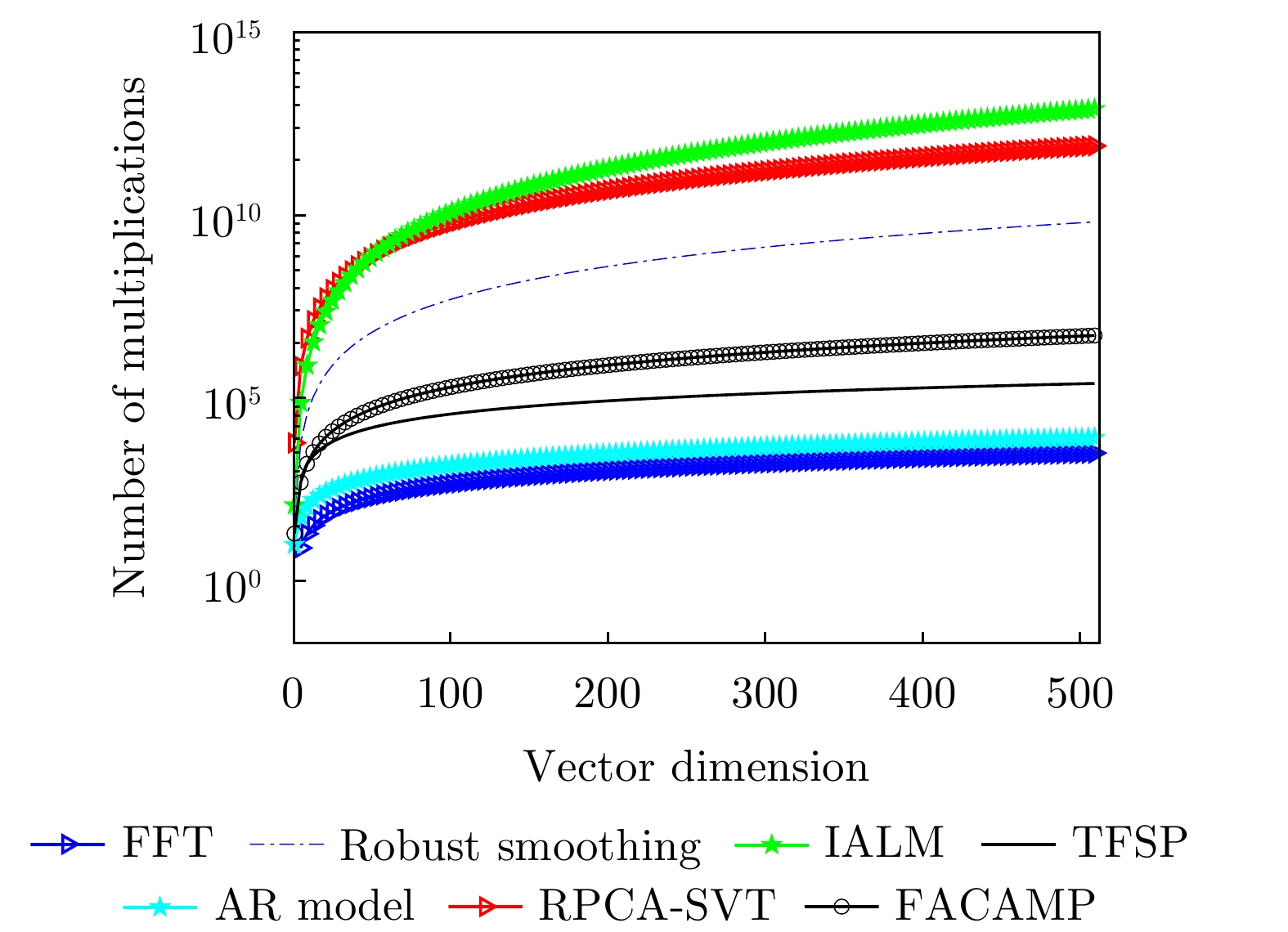
The target detection performance of skywave Over-the-Horizon Radar (OTHR) often struggles with transient interference. To address this issue, we have developed a transient interference suppression algorithm that uses Time Frequency Sparsity Prior (TFSP). TFSP uses the sparse nature of transient interference in the slow-time domain along with the sparse prior of sea clutter and targets in the Doppler frequency domain to construct an objective function, that is optimized using the Alternating Direction Method of Multipliers (ADMM) to effectively suppress transient interference. Unlike traditional methods that focus on locating and eliminating interference before recovering data, TFSP can directly separate transient interference components and restore an interference-free Doppler spectrum. Experimental results from OTHR data confirm that TFSP effectively suppresses transient interference in sea and air modes. TFSP offers a higher output Signal-to-Noise Ratio (SNR) and higher computational efficiency than most existing methods. In particular, it increases the output SNR by approximately 3~5 dB while maintaining computational complexity at a linear logarithmic order.
The target detection performance of skywave Over-the-Horizon Radar (OTHR) often struggles with transient interference. To address this issue, we have developed a transient interference suppression algorithm that uses Time Frequency Sparsity Prior (TFSP). TFSP uses the sparse nature of transient interference in the slow-time domain along with the sparse prior of sea clutter and targets in the Doppler frequency domain to construct an objective function, that is optimized using the Alternating Direction Method of Multipliers (ADMM) to effectively suppress transient interference. Unlike traditional methods that focus on locating and eliminating interference before recovering data, TFSP can directly separate transient interference components and restore an interference-free Doppler spectrum. Experimental results from OTHR data confirm that TFSP effectively suppresses transient interference in sea and air modes. TFSP offers a higher output Signal-to-Noise Ratio (SNR) and higher computational efficiency than most existing methods. In particular, it increases the output SNR by approximately 3~5 dB while maintaining computational complexity at a linear logarithmic order.








2024, 13(6): 1170-1183.
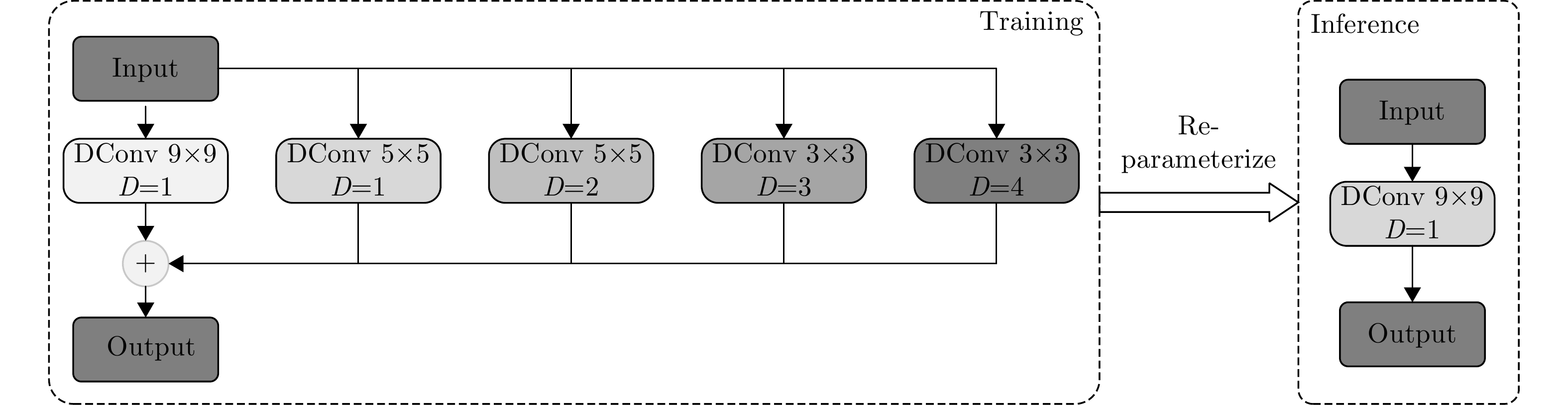
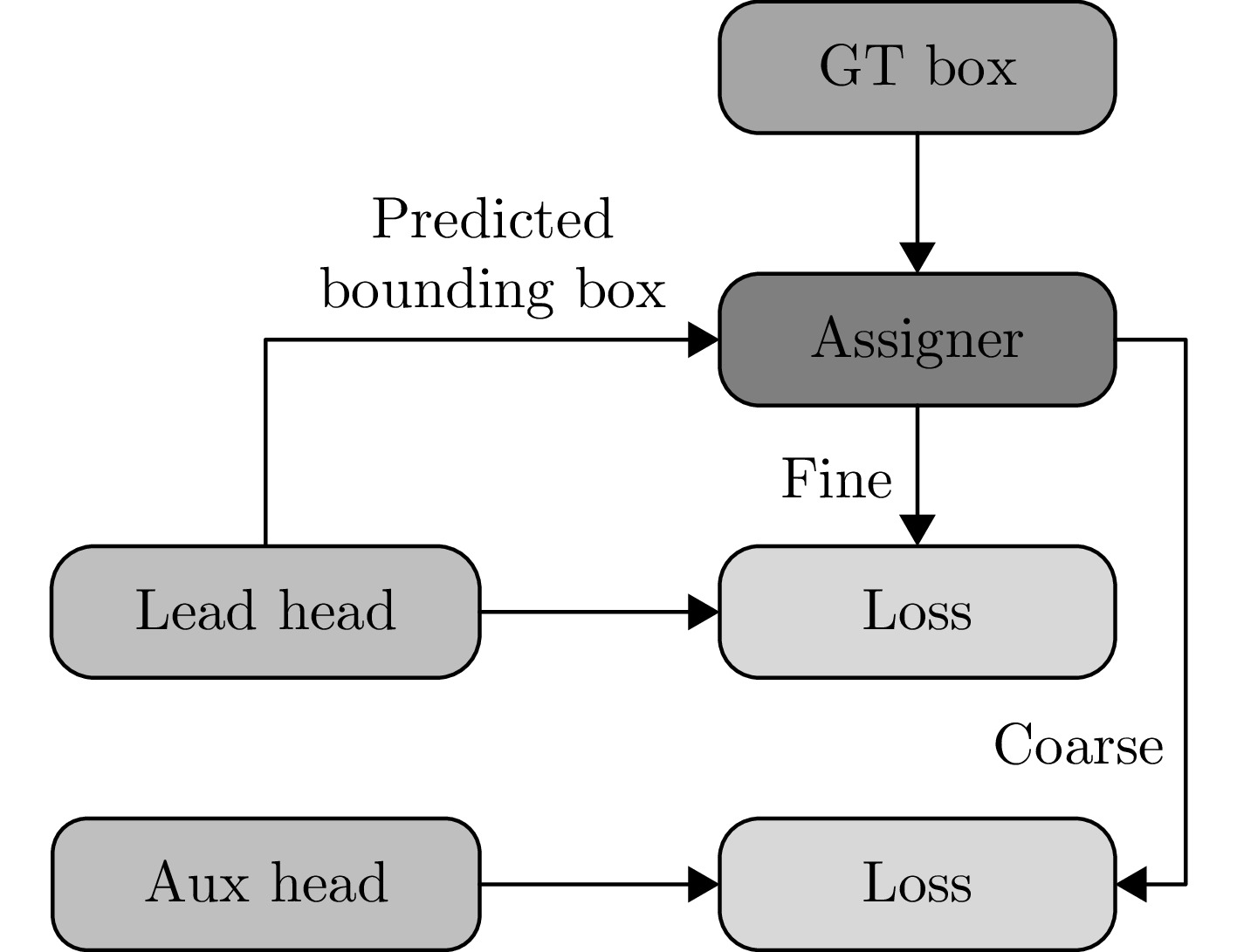
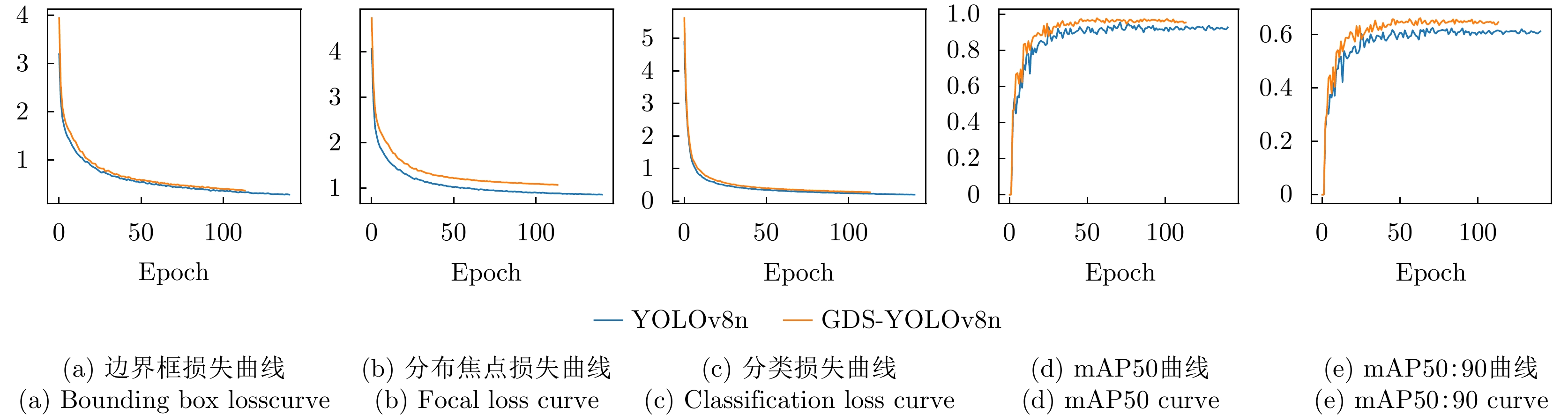
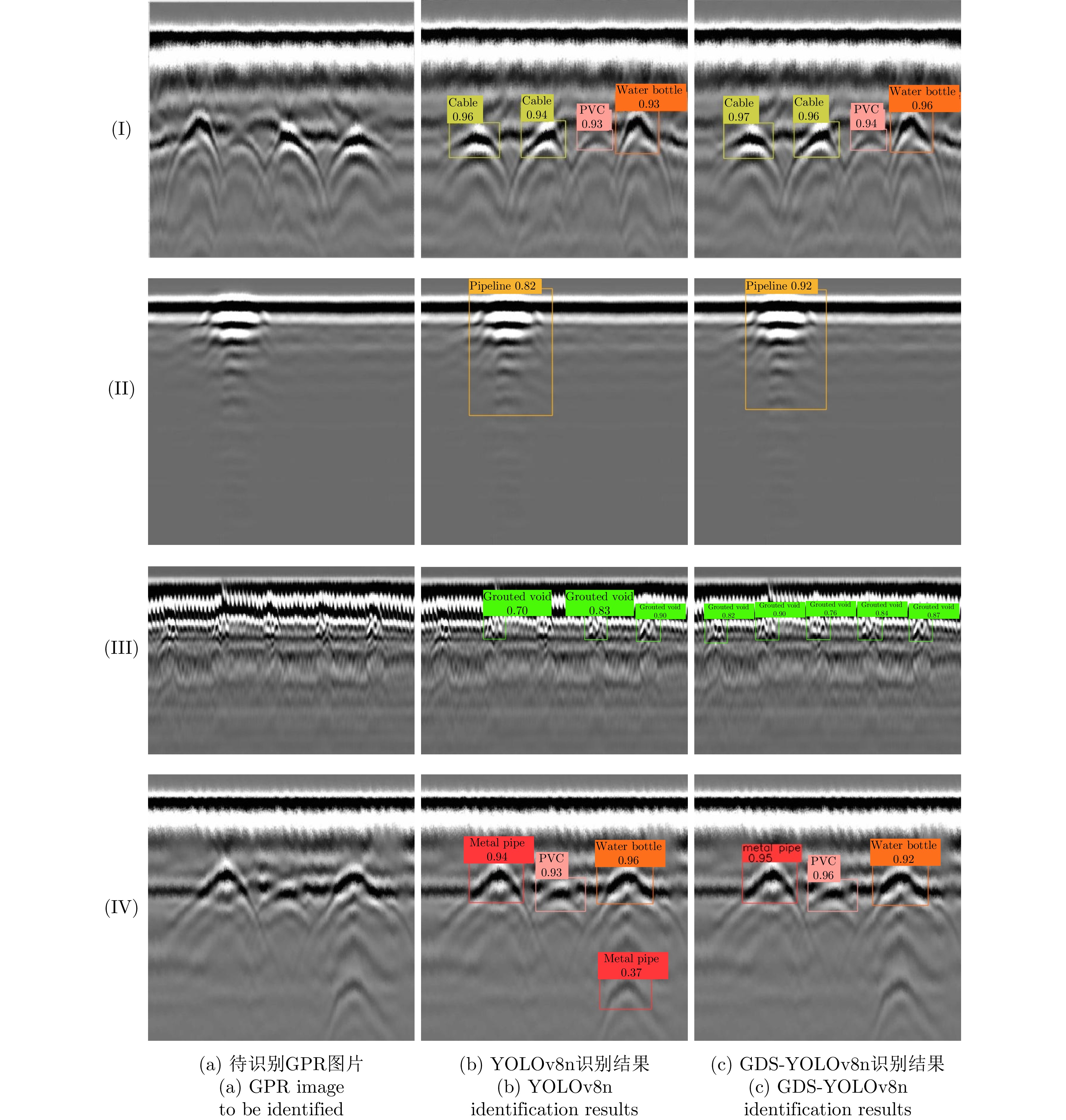
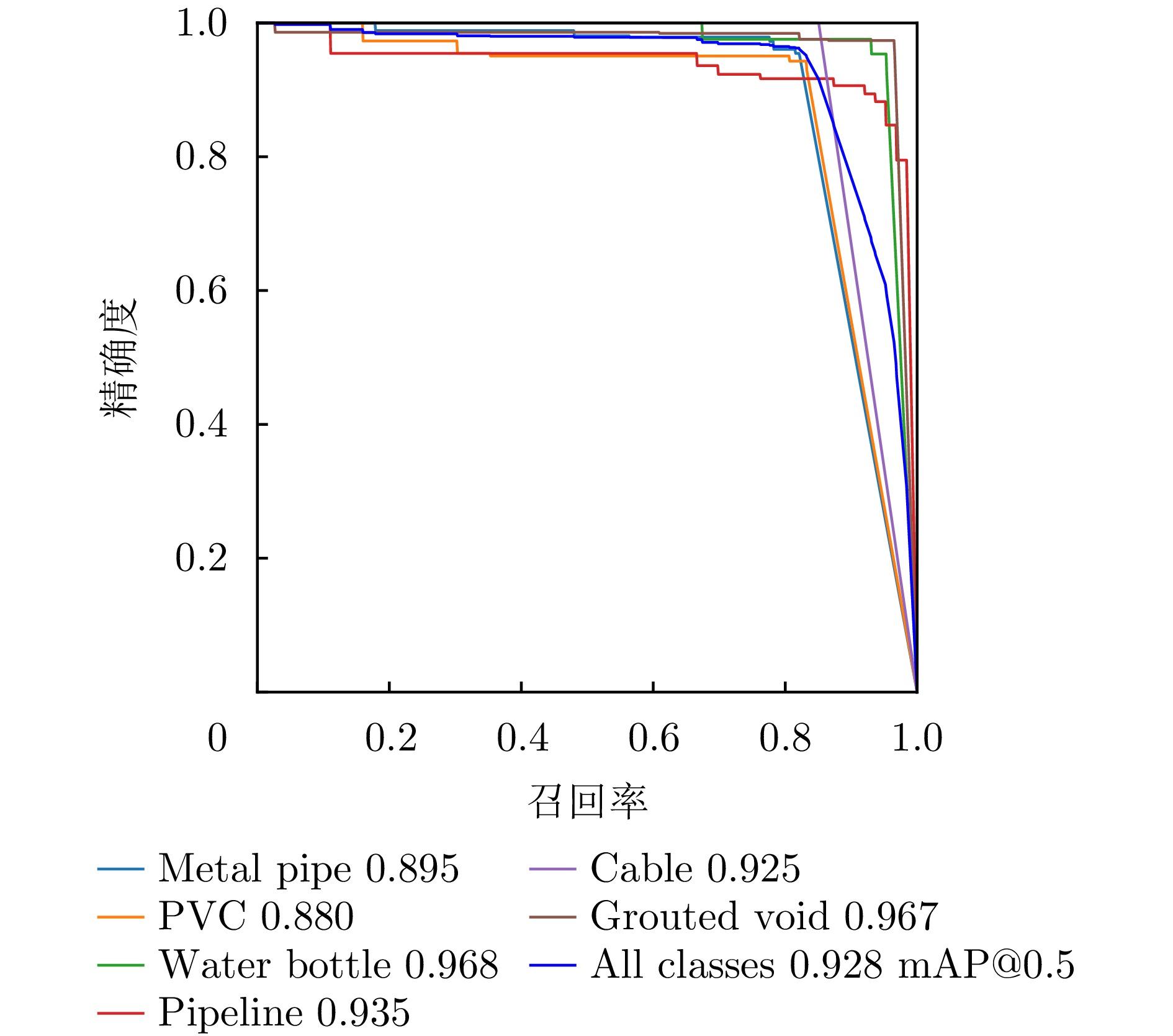
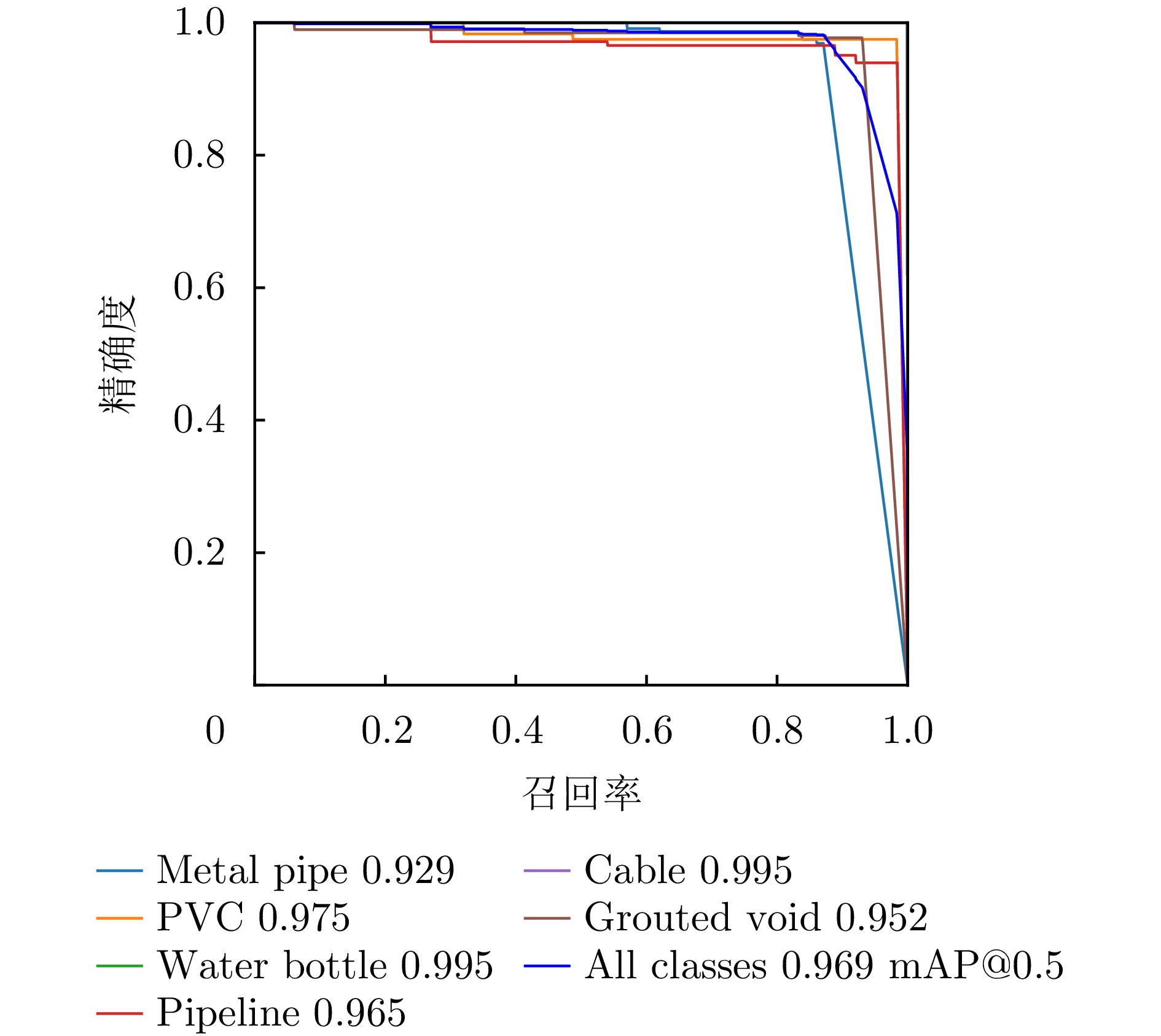
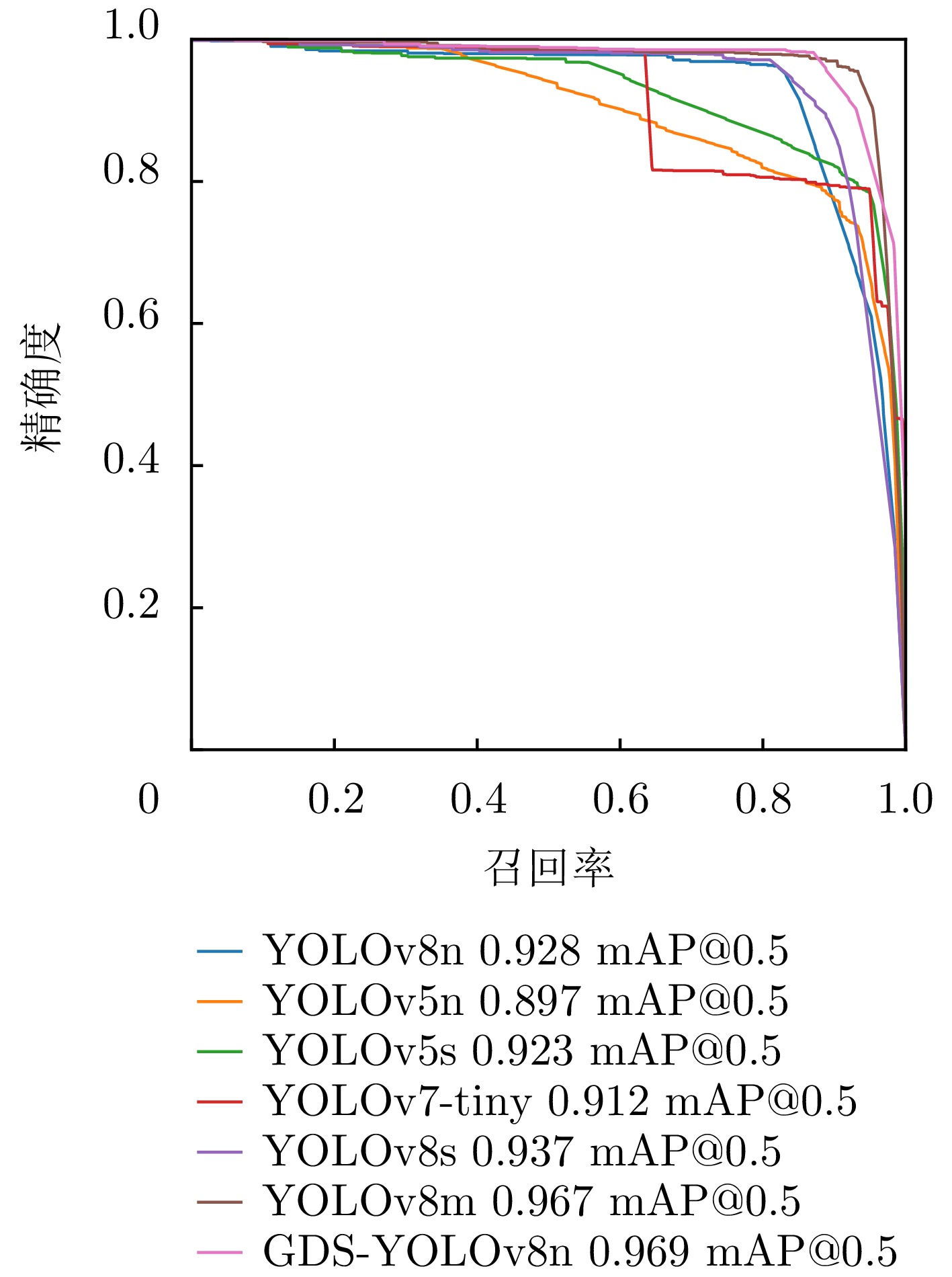
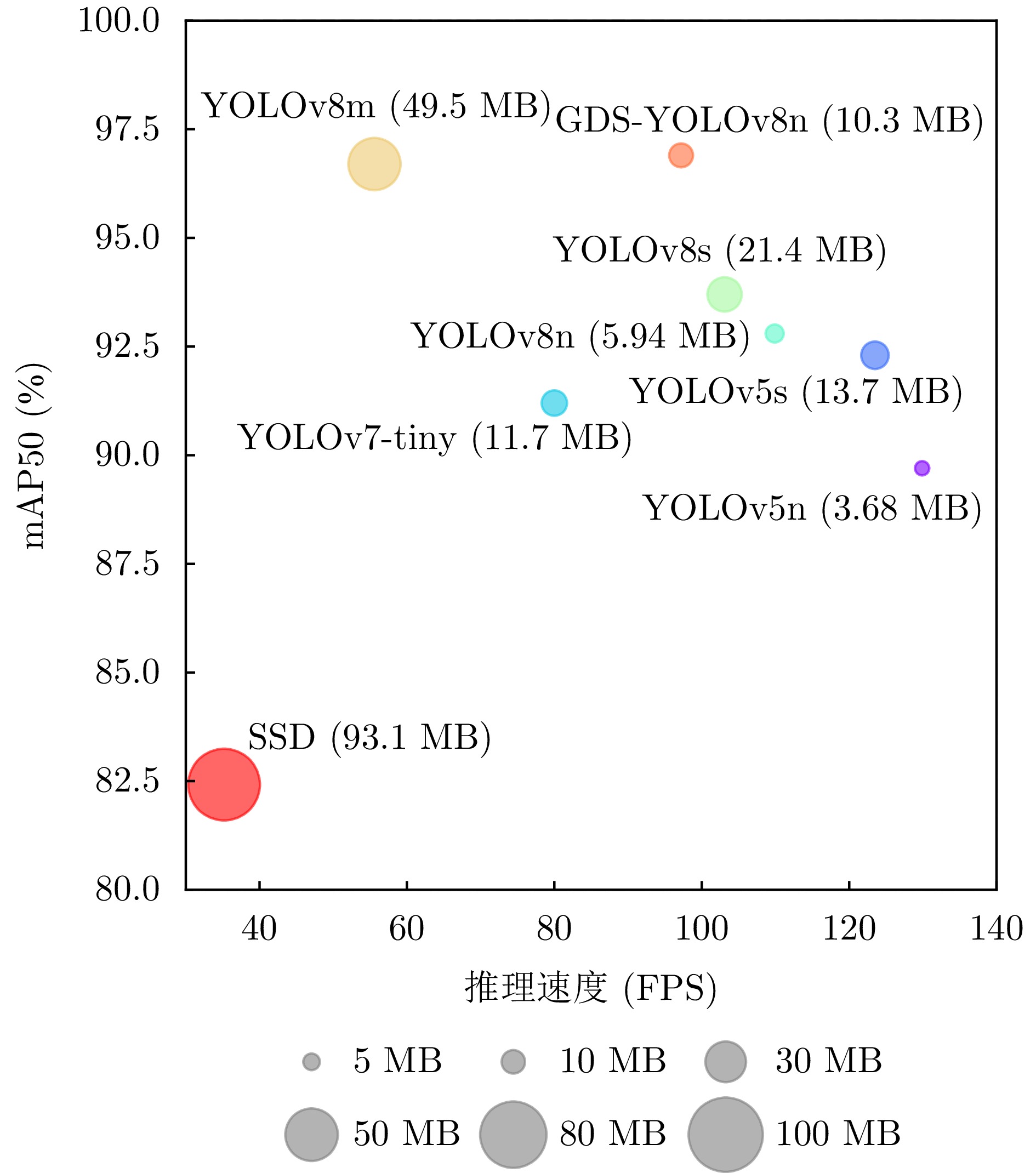
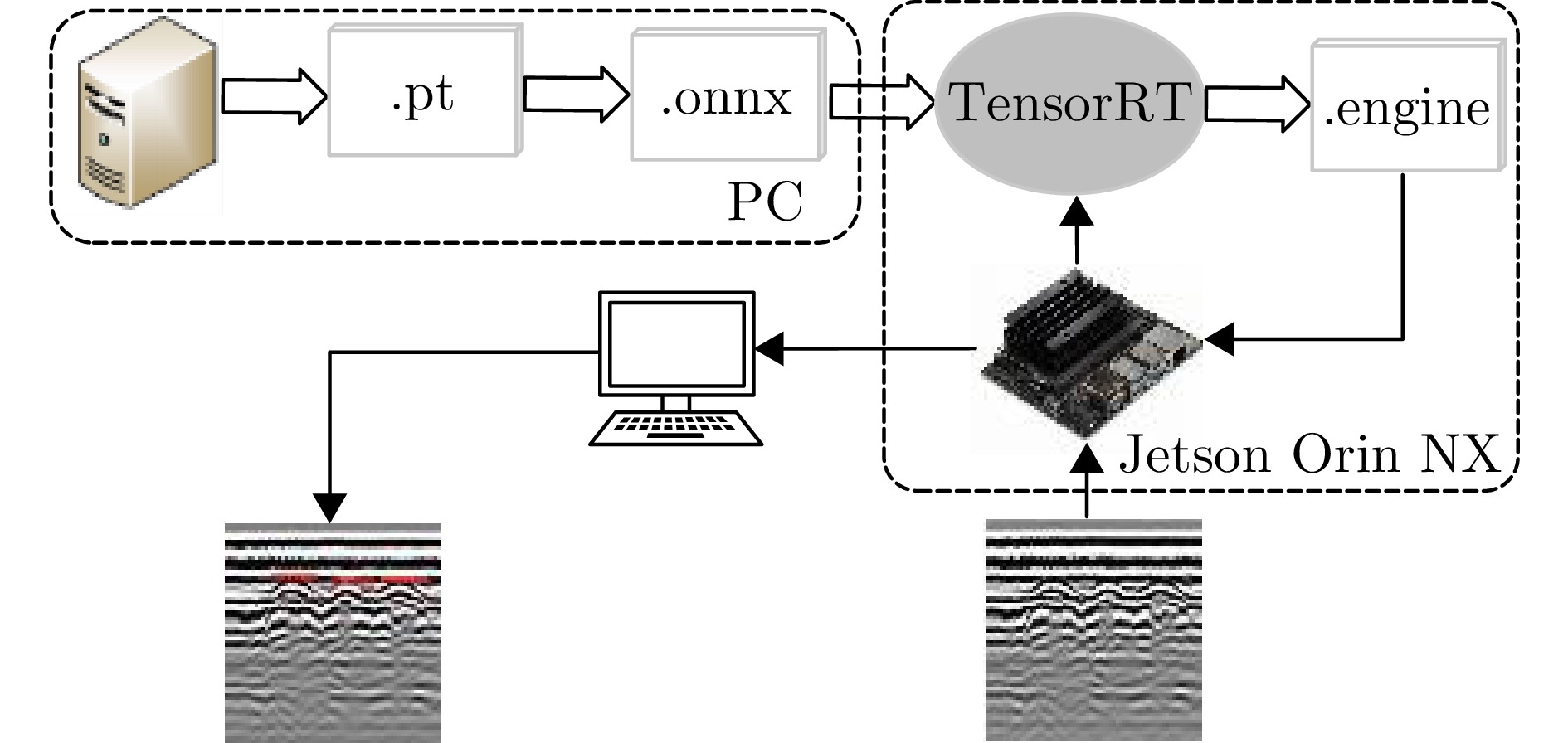
Ground Penetrating Radar (GPR) image detection currently faces challenges such as low accuracy, false detections, and missed detections. To overcome these challenges, we propose a novel model referred to as GDS-YOLOv8n for detecting common underground targets in GPR images. The model incorporates the DRRB (Dilated Residual Reparam Block) feature extraction module to achieve enhanced multiscale feature extraction, with certain C2f modules in the YOLOv8n architecture being effectively replaced. In addition, the space-to-depth Conv downsampling module is used to replace the Conv modules corresponding to feature maps with a resolution of 320×320 pixels and less. This replacement assists in mitigating information loss during the downsampling of GPR images, particularly for images with limited resolution and small targets. Furthermore, the detection performance is enhanced using an auxiliary training module, ensuring performance improvement without increasing inference complexity. The introduction of the Inner-SIoU loss function refines bounding box predictions by imposing new constraints tailored to GPR image characteristics. Experimental results on real-world GPR datasets demonstrate the effectiveness of the GDS-YOLOv8n model. For six classes of common underground targets, including metal pipes, PVC pipes, and cables, the model achieves a precision of 97.1%, recall of 96.2%, and mean average precision at 50% IoU (mAP50) of 96.9%. These results indicate improvements of 4.0%, 6.1%, and 4.1%, respectively, compared to corresponding values of the YOLOv8n model, with notable improvements observed when detecting PVC pipes and cables. Compared with those of models such as YOLOv5n, YOLOv7-tiny, and SSD (Single Shot multibox Detector), our model’s mAP50 is improved by 7.20%, 5.70%, and 14.48%, respectively. Finally, the application of our model on a NVIDIA Jetson Orin NX embedded system results in an increase in the detection speed from 22 to 40.6 FPS after optimization via TensorRT and FP16 quantization, meeting the demands for the real-time detection of underground targets in mobile scenarios.
Ground Penetrating Radar (GPR) image detection currently faces challenges such as low accuracy, false detections, and missed detections. To overcome these challenges, we propose a novel model referred to as GDS-YOLOv8n for detecting common underground targets in GPR images. The model incorporates the DRRB (Dilated Residual Reparam Block) feature extraction module to achieve enhanced multiscale feature extraction, with certain C2f modules in the YOLOv8n architecture being effectively replaced. In addition, the space-to-depth Conv downsampling module is used to replace the Conv modules corresponding to feature maps with a resolution of 320×320 pixels and less. This replacement assists in mitigating information loss during the downsampling of GPR images, particularly for images with limited resolution and small targets. Furthermore, the detection performance is enhanced using an auxiliary training module, ensuring performance improvement without increasing inference complexity. The introduction of the Inner-SIoU loss function refines bounding box predictions by imposing new constraints tailored to GPR image characteristics. Experimental results on real-world GPR datasets demonstrate the effectiveness of the GDS-YOLOv8n model. For six classes of common underground targets, including metal pipes, PVC pipes, and cables, the model achieves a precision of 97.1%, recall of 96.2%, and mean average precision at 50% IoU (mAP50) of 96.9%. These results indicate improvements of 4.0%, 6.1%, and 4.1%, respectively, compared to corresponding values of the YOLOv8n model, with notable improvements observed when detecting PVC pipes and cables. Compared with those of models such as YOLOv5n, YOLOv7-tiny, and SSD (Single Shot multibox Detector), our model’s mAP50 is improved by 7.20%, 5.70%, and 14.48%, respectively. Finally, the application of our model on a NVIDIA Jetson Orin NX embedded system results in an increase in the detection speed from 22 to 40.6 FPS after optimization via TensorRT and FP16 quantization, meeting the demands for the real-time detection of underground targets in mobile scenarios.







2024, 13(6): 1184-1201.
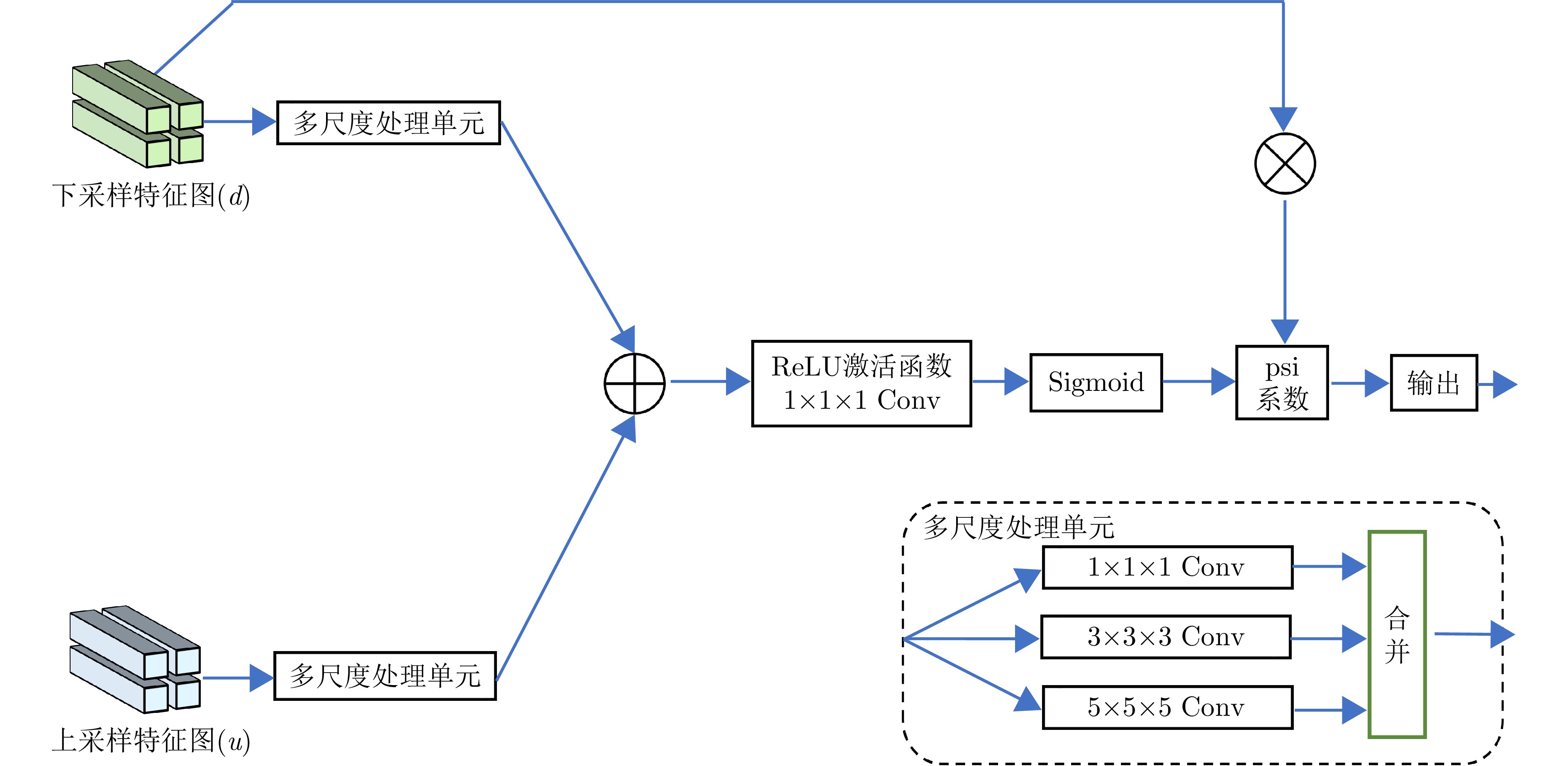
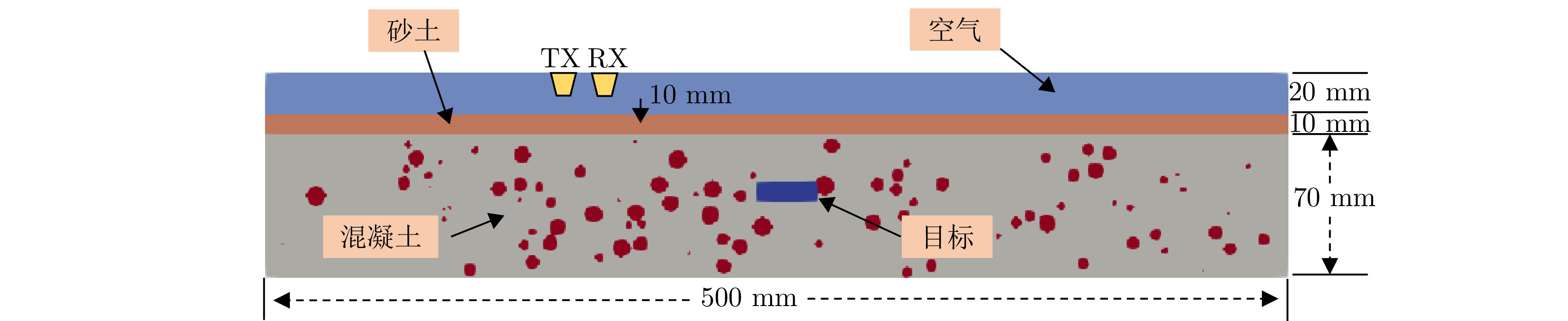
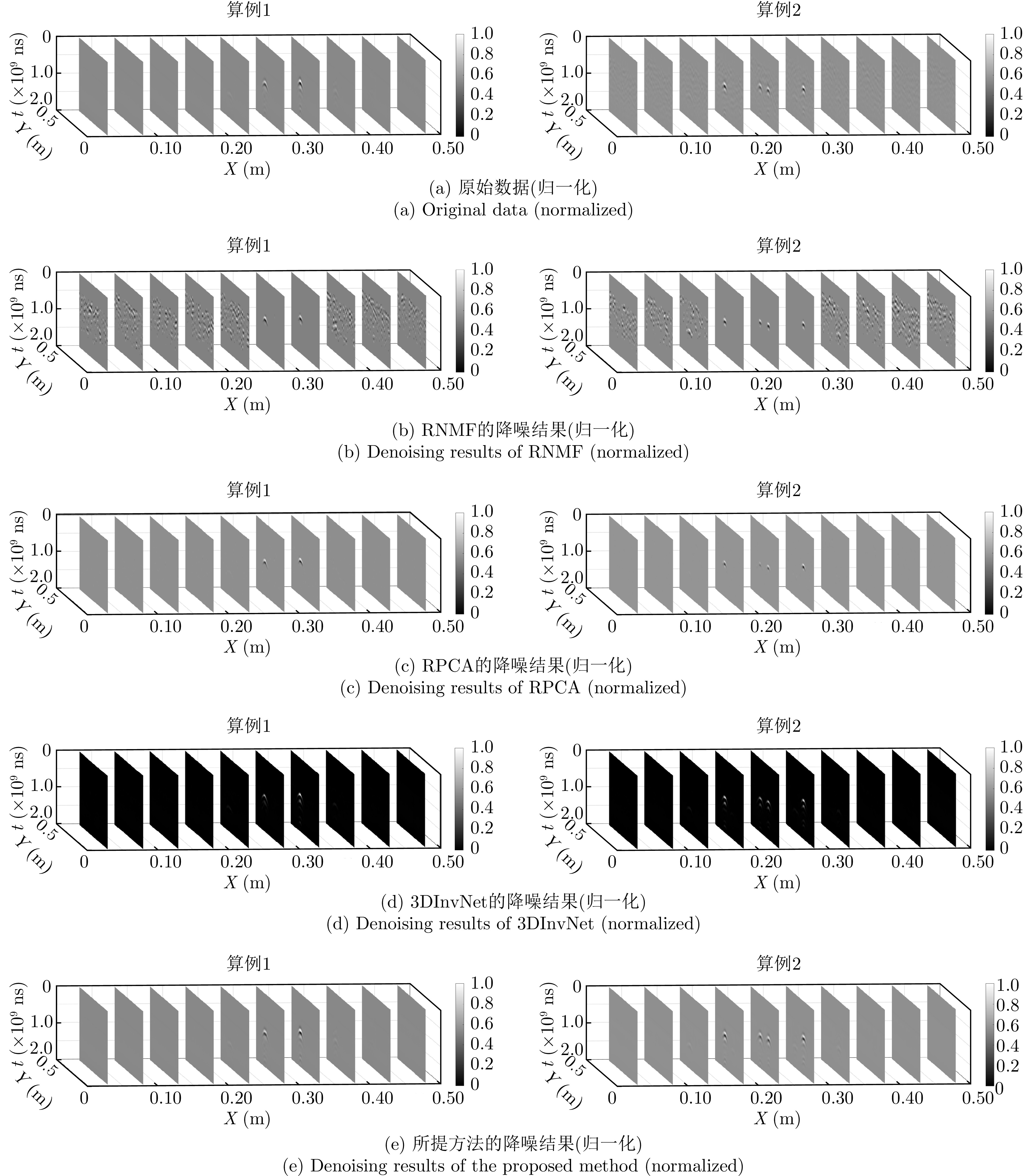
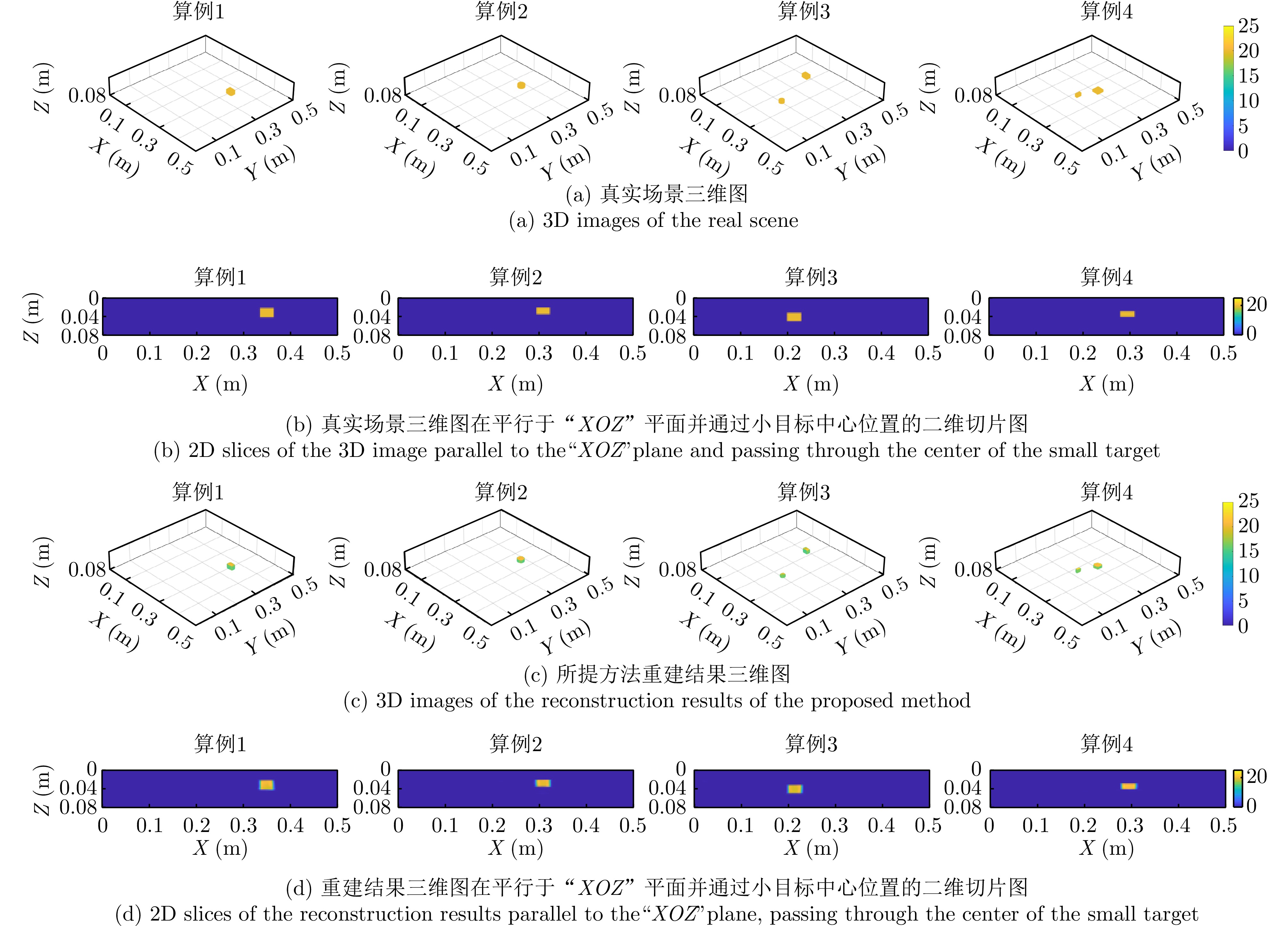
Ground Penetrating radars (GPR) are essential for detecting buried targets in civilian and military applications, especially given the increasing demand for detecting and imaging small targets within walls. The complex structures and materials of walls pose substantial challenges for precisely reconstructing small targets. To address this issue, this study proposes a multistage cascaded U-Net approach for the three-dimensional reconstruction of small targets within walls. First, we developed a high-resolution detection model and a dataset tailored to handle complex wall scenes. Thereafter, using the Monte Carlo sampling method, we sampled aggregate particle sizes to create a physical three-dimensional aggregate scattering model that satisfies grading requirements, thus enhancing the realism and accuracy of the simulated scenes. Our multistage network design effectively suppresses noise and inhomogeneous clutter in C-scan data, thereby improving signal quality. The preprocessed data are then fed into subsequent network stages to reconstruct the distribution of three-dimensional reconstruction values. In addition, we proposed an adaptive multiscale module and a cascaded network training strategy to better fit small target information in complex scenes. Through comparisons with simulated and measured data, we confirmed the effectiveness and generalizability of our method. Unlike existing techniques, our approach successfully reconstructs small targets within three-dimensional walls, thereby considerably enhancing the peak signal-to-noise ratio and providing critical technical support for accurately detecting small targets within walls.
Ground Penetrating radars (GPR) are essential for detecting buried targets in civilian and military applications, especially given the increasing demand for detecting and imaging small targets within walls. The complex structures and materials of walls pose substantial challenges for precisely reconstructing small targets. To address this issue, this study proposes a multistage cascaded U-Net approach for the three-dimensional reconstruction of small targets within walls. First, we developed a high-resolution detection model and a dataset tailored to handle complex wall scenes. Thereafter, using the Monte Carlo sampling method, we sampled aggregate particle sizes to create a physical three-dimensional aggregate scattering model that satisfies grading requirements, thus enhancing the realism and accuracy of the simulated scenes. Our multistage network design effectively suppresses noise and inhomogeneous clutter in C-scan data, thereby improving signal quality. The preprocessed data are then fed into subsequent network stages to reconstruct the distribution of three-dimensional reconstruction values. In addition, we proposed an adaptive multiscale module and a cascaded network training strategy to better fit small target information in complex scenes. Through comparisons with simulated and measured data, we confirmed the effectiveness and generalizability of our method. Unlike existing techniques, our approach successfully reconstructs small targets within three-dimensional walls, thereby considerably enhancing the peak signal-to-noise ratio and providing critical technical support for accurately detecting small targets within walls.










2024, 13(6): 1202-1219.
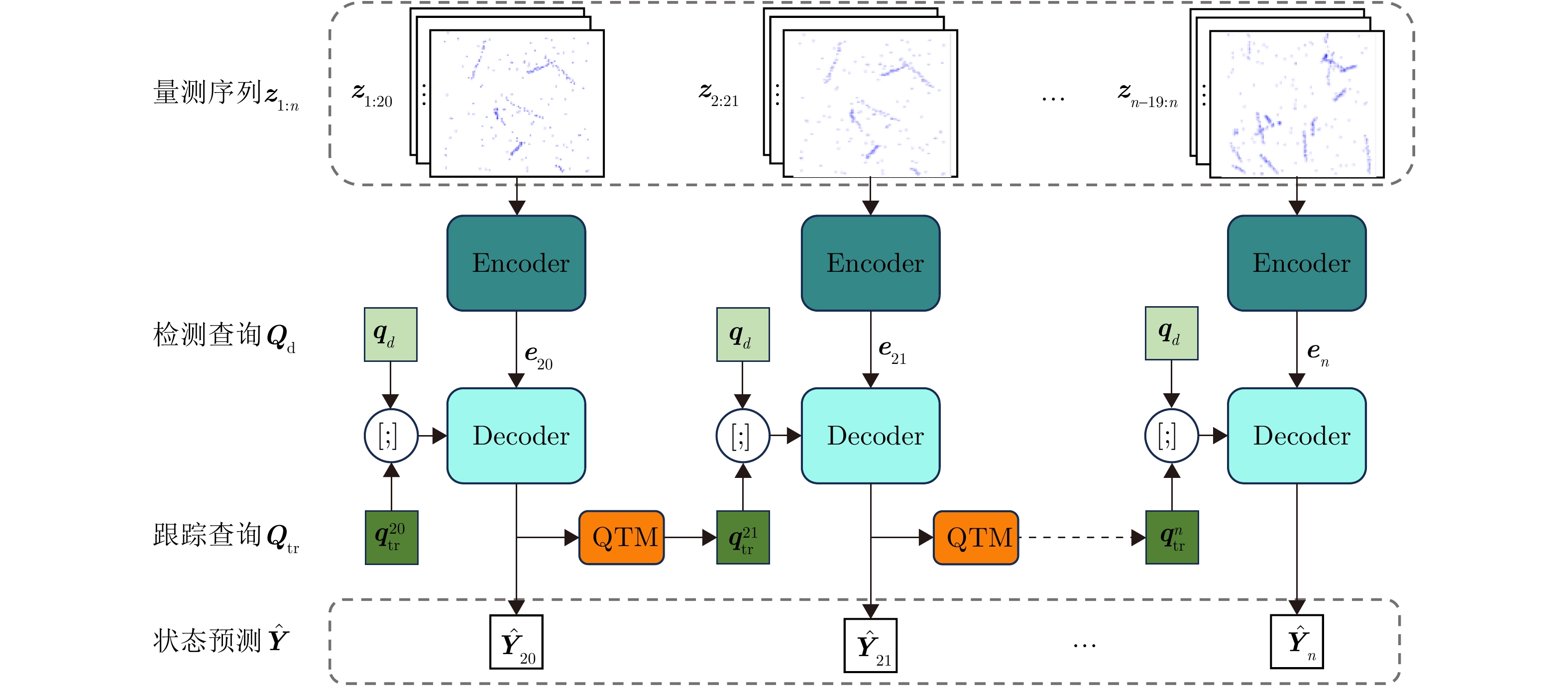
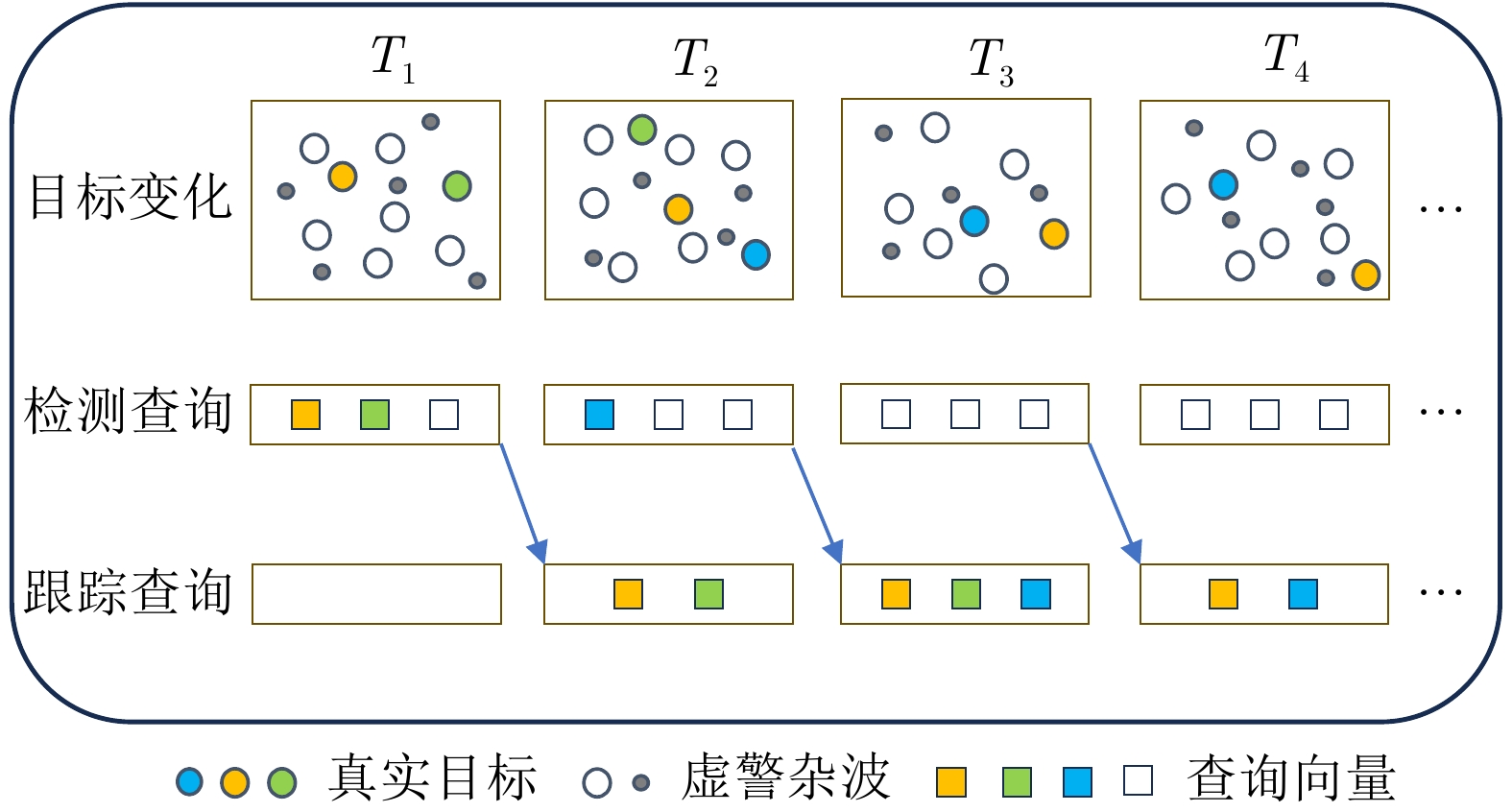
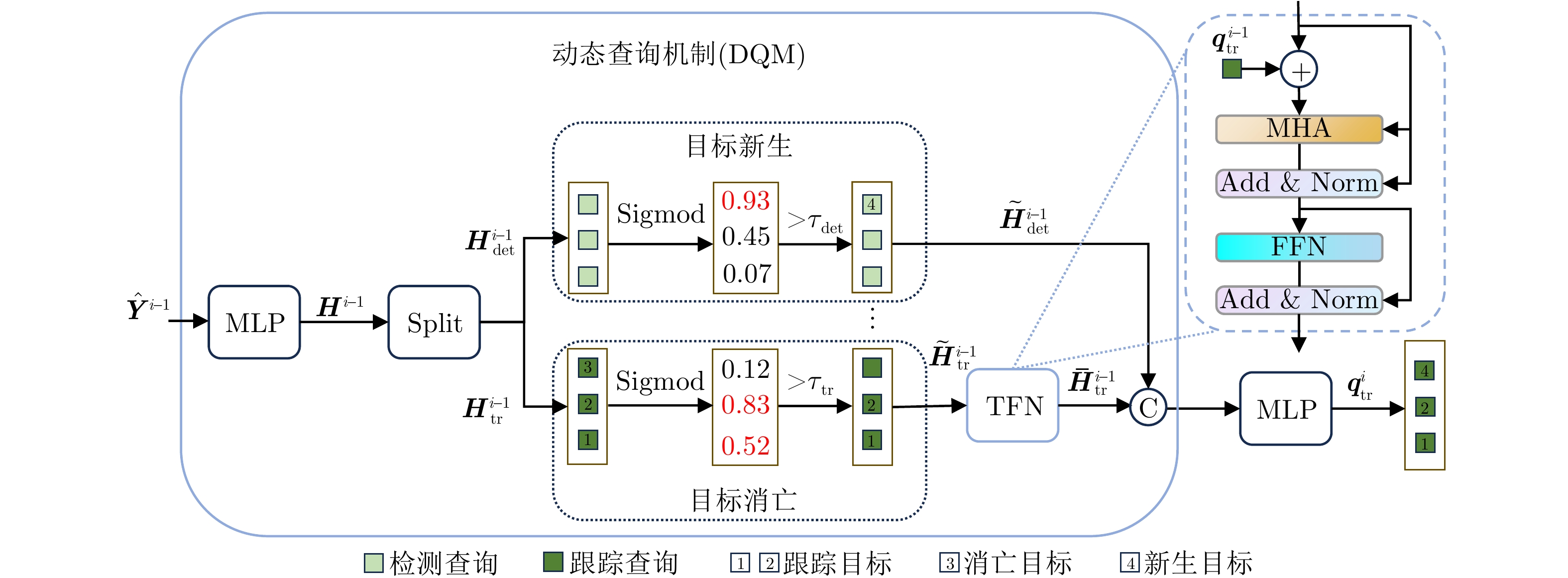
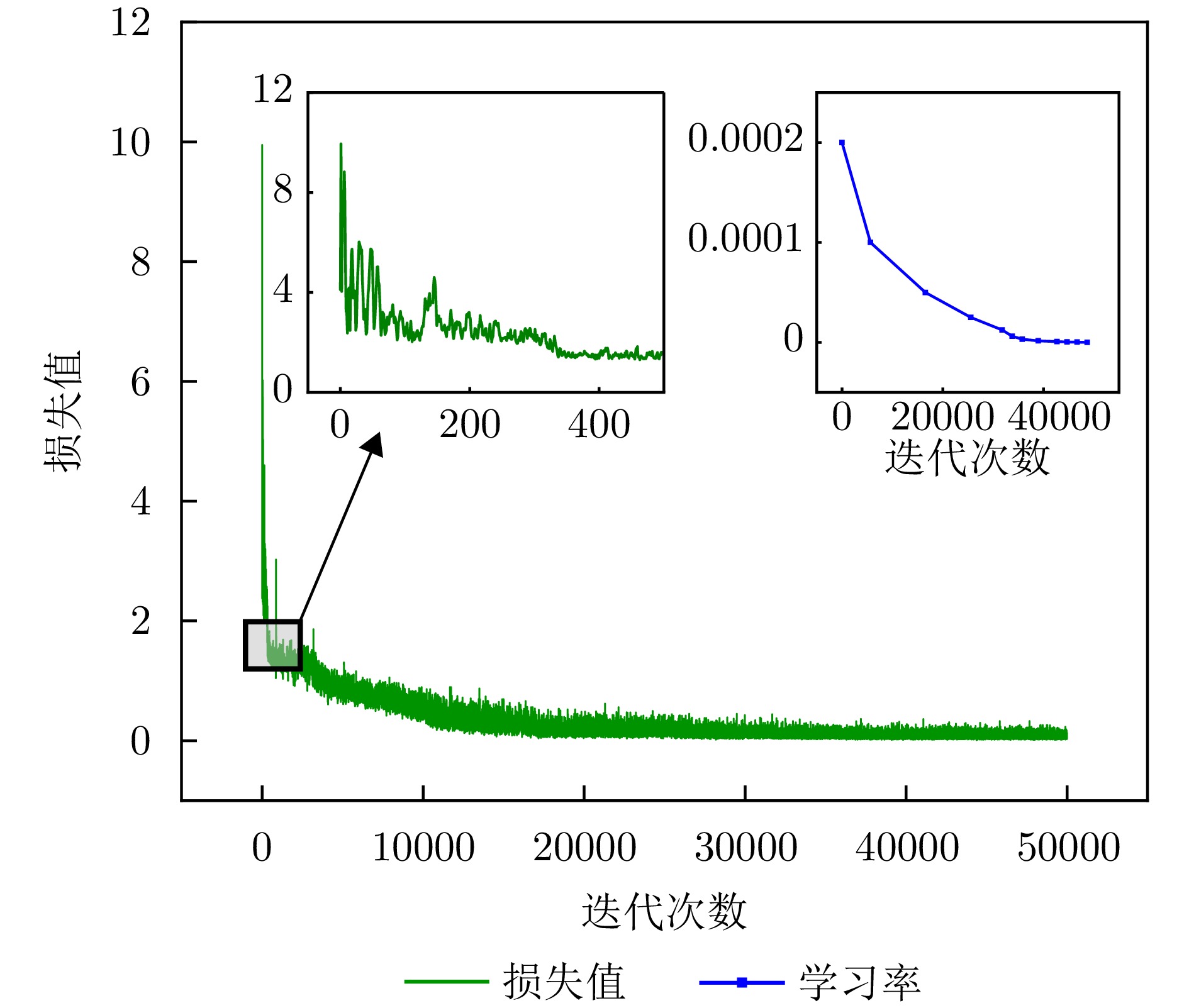
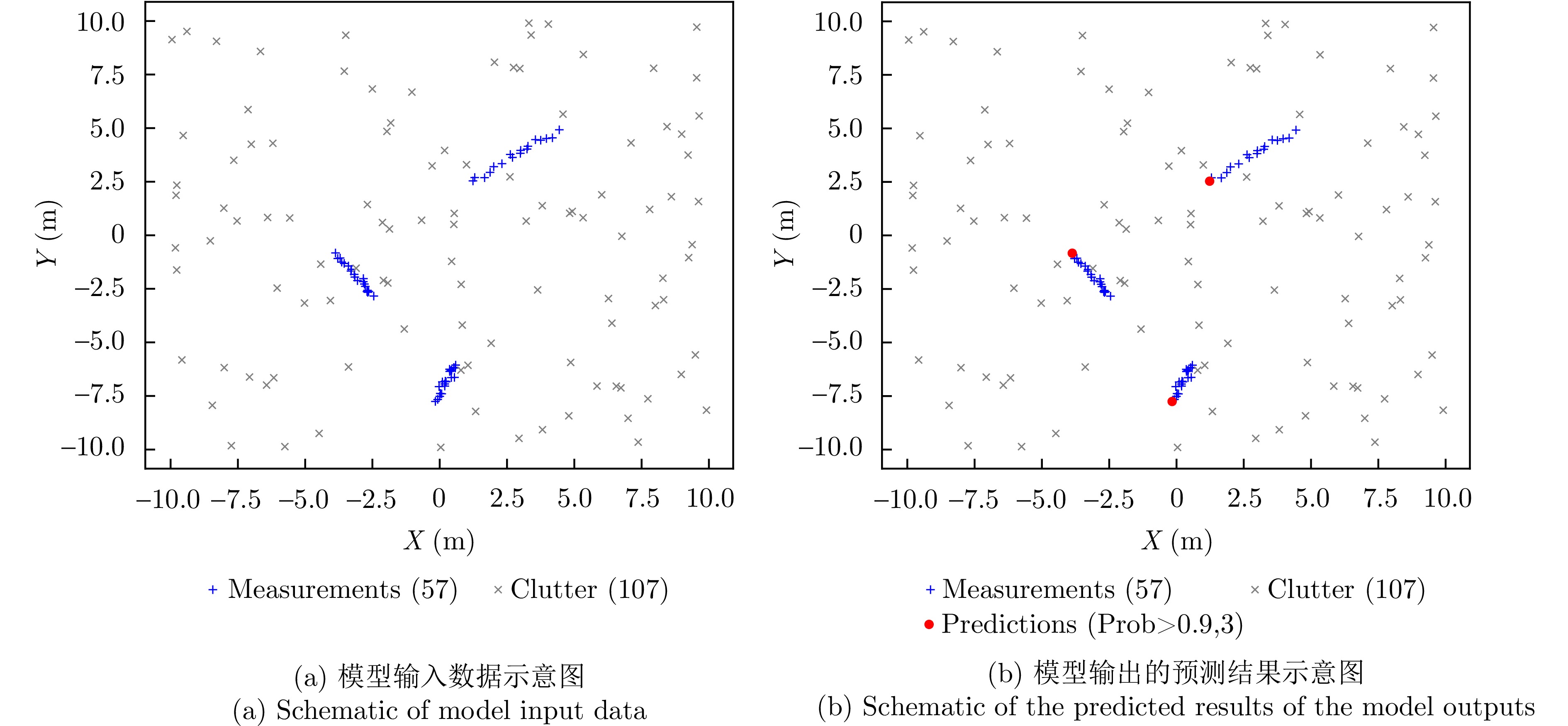
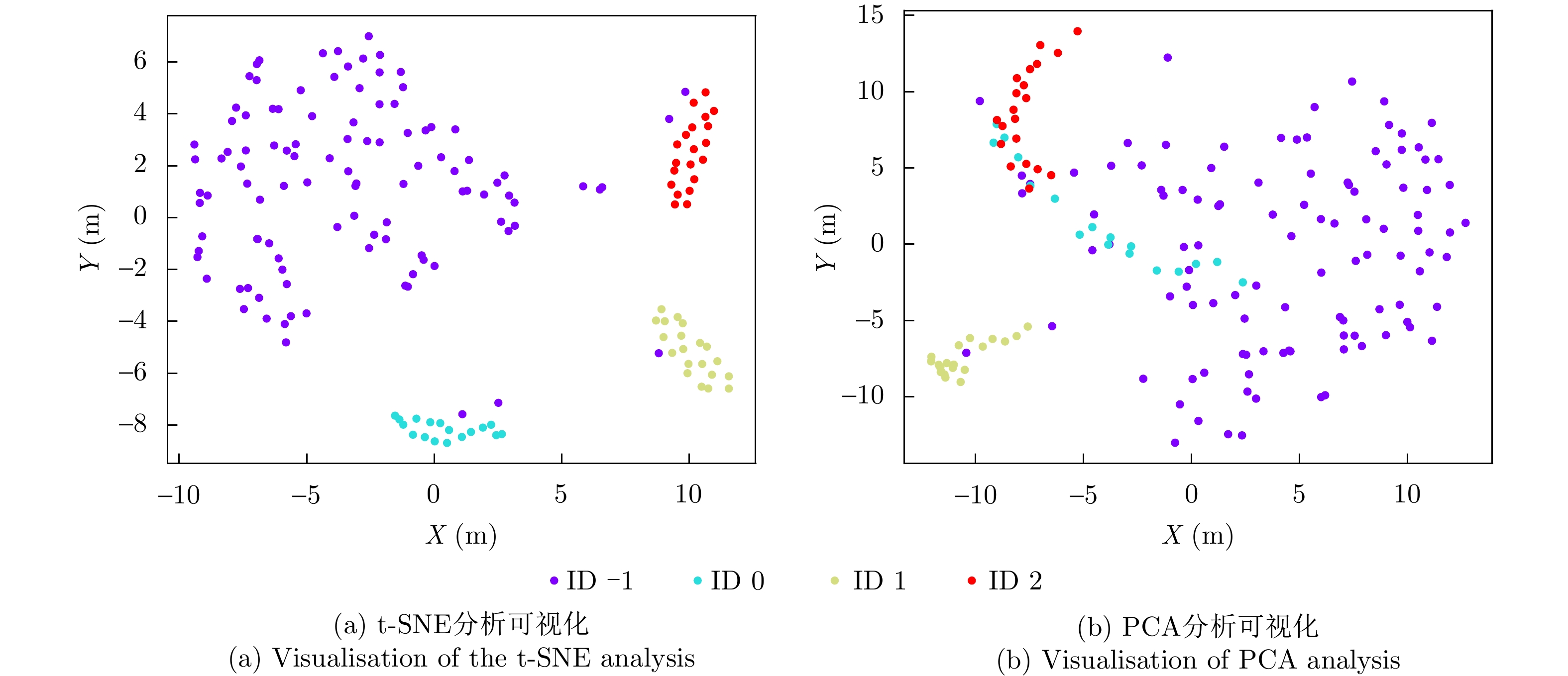
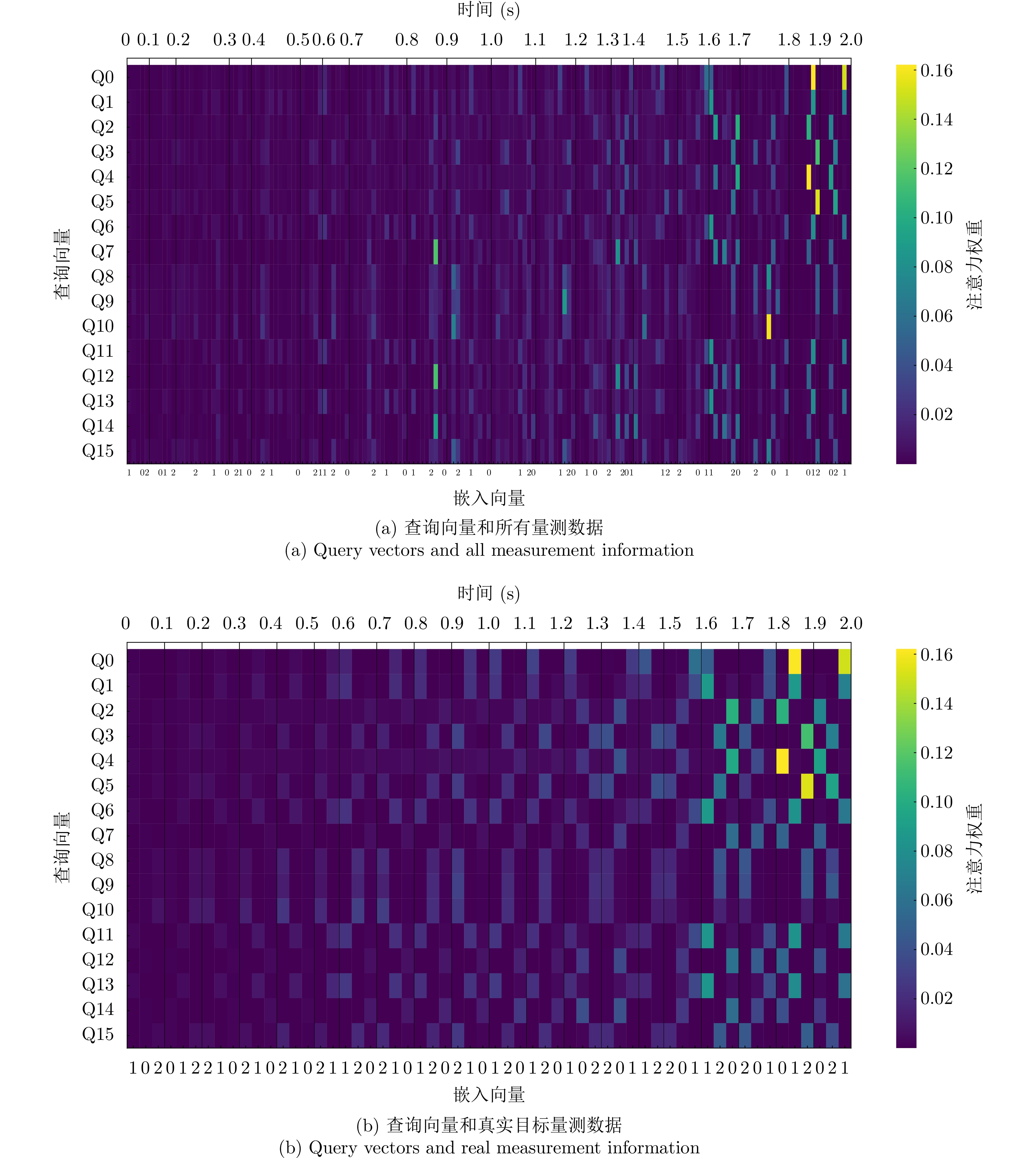
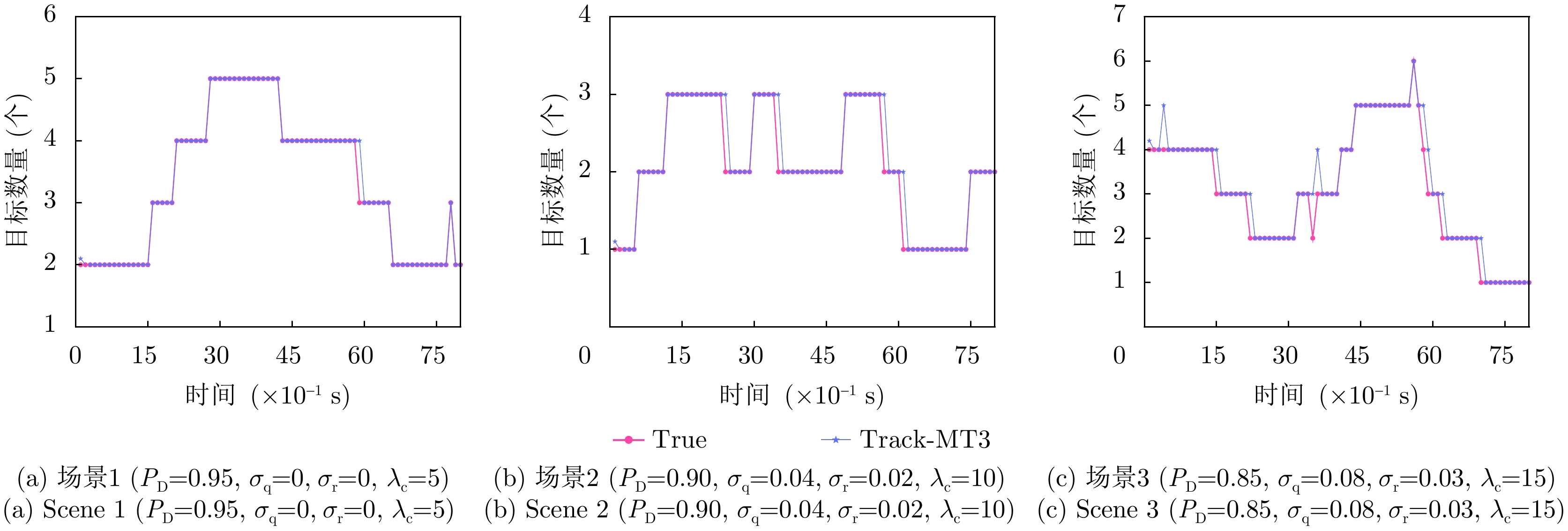
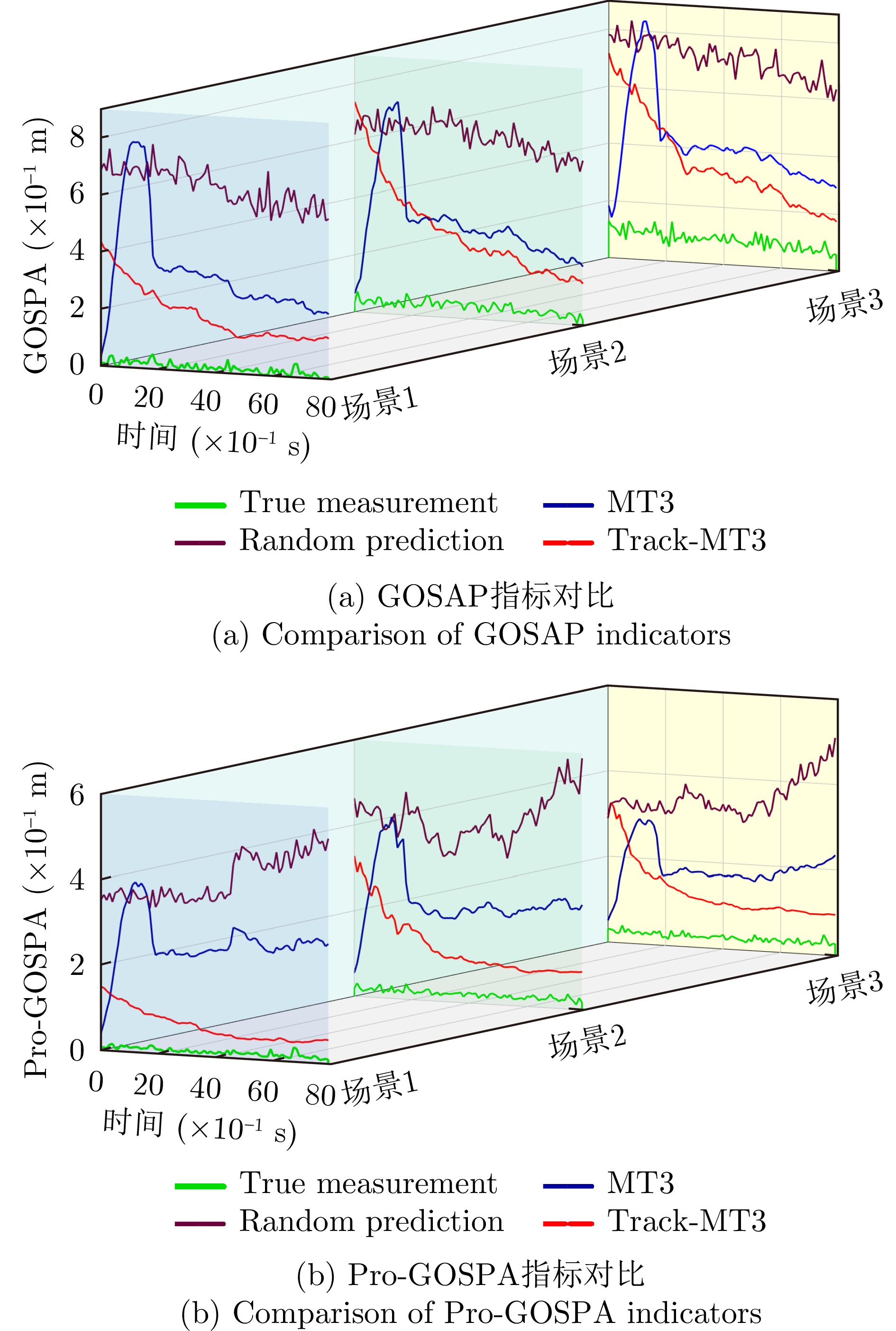
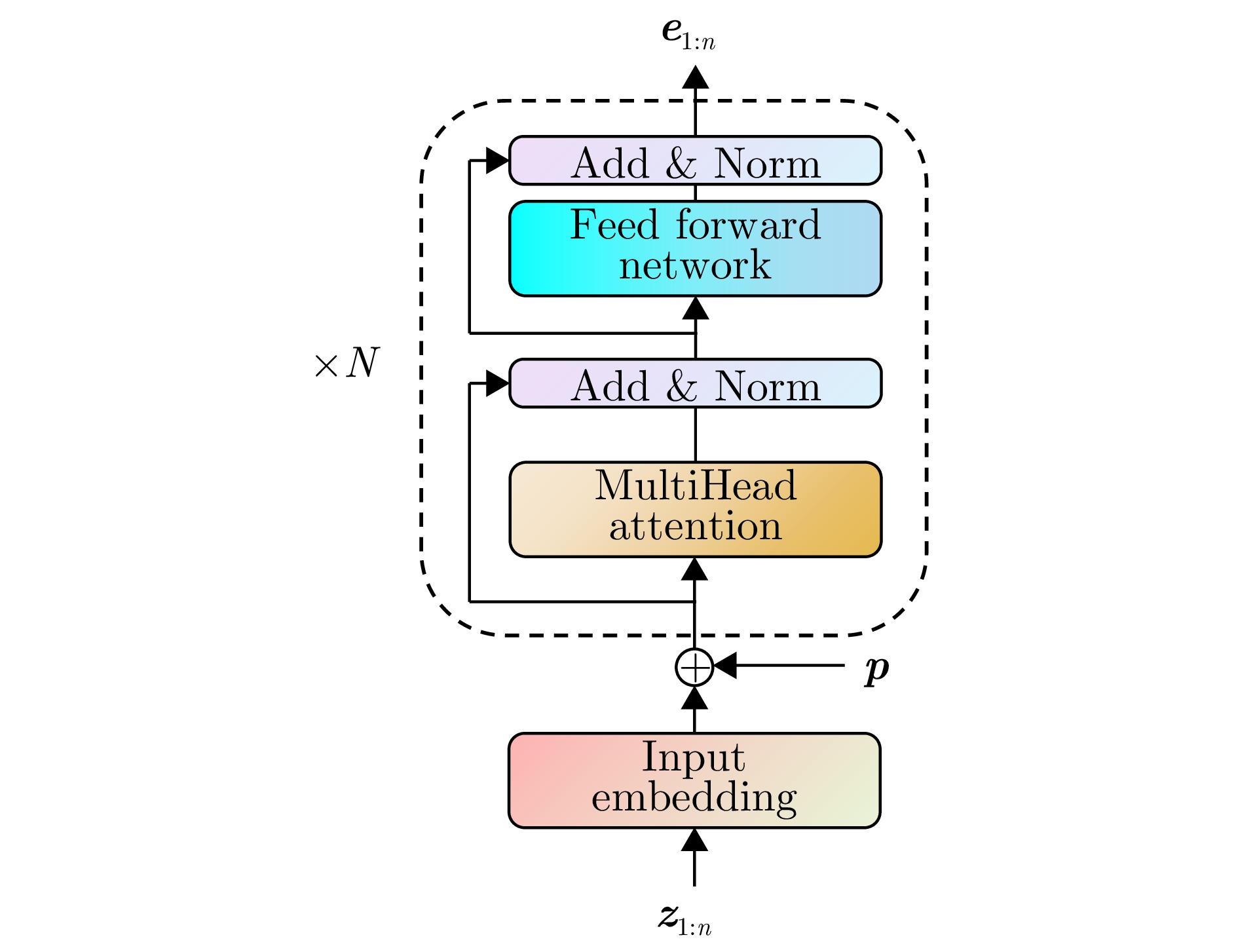
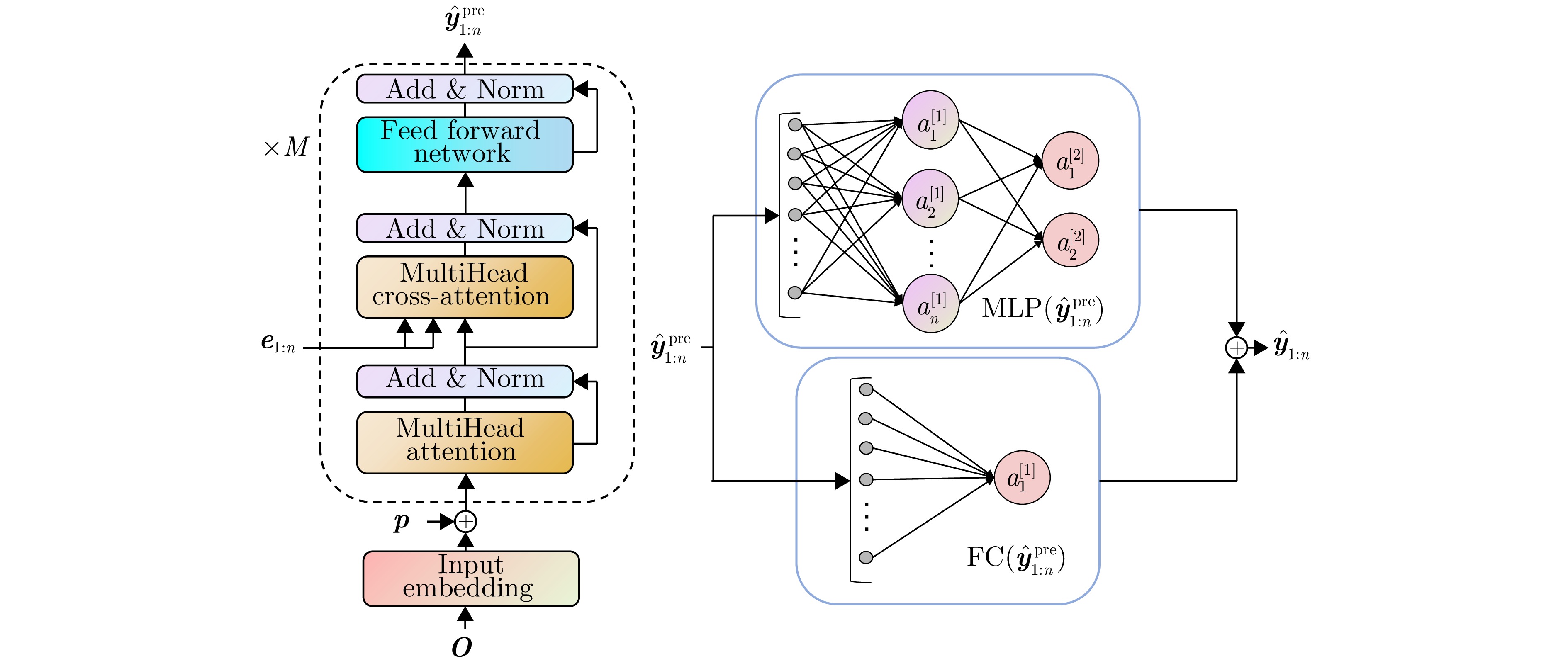
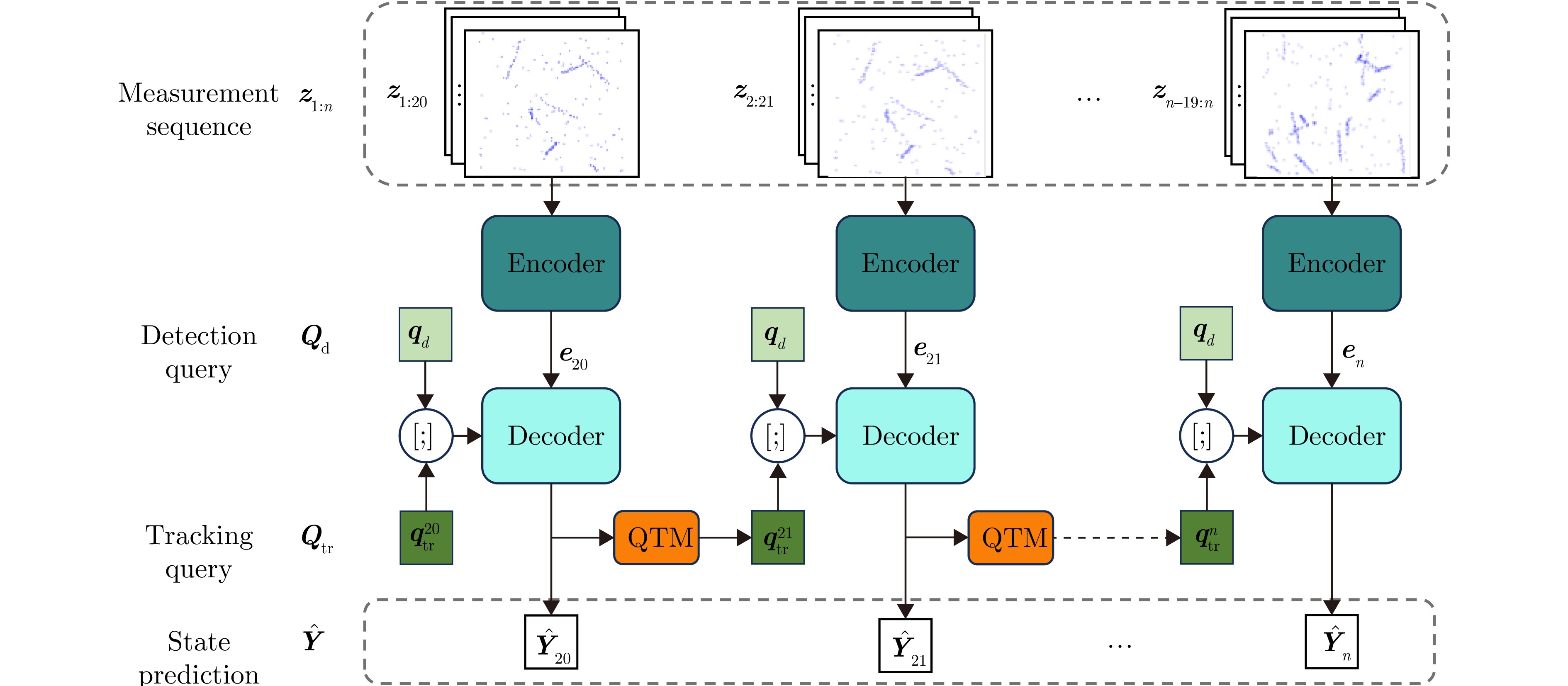
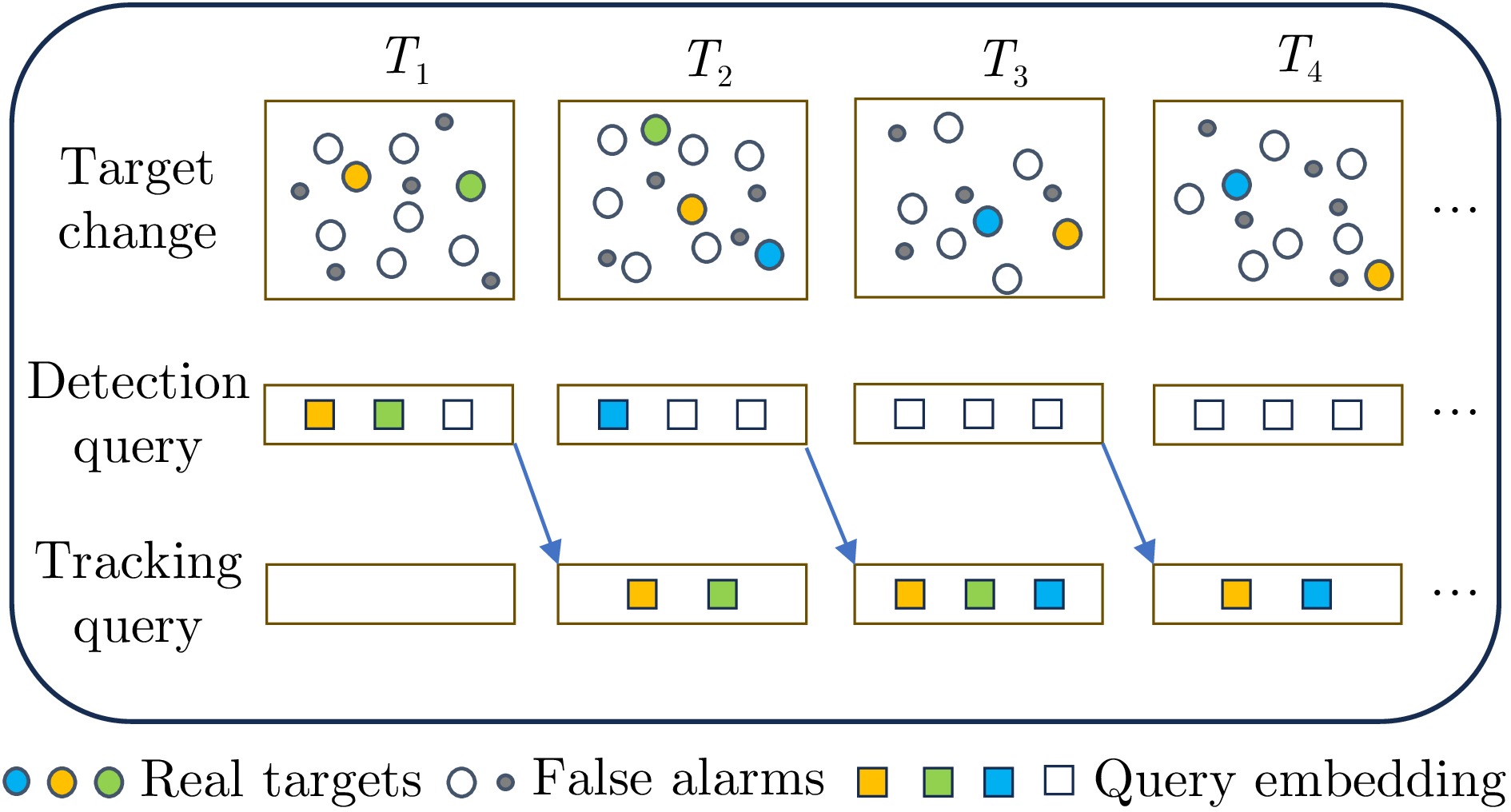
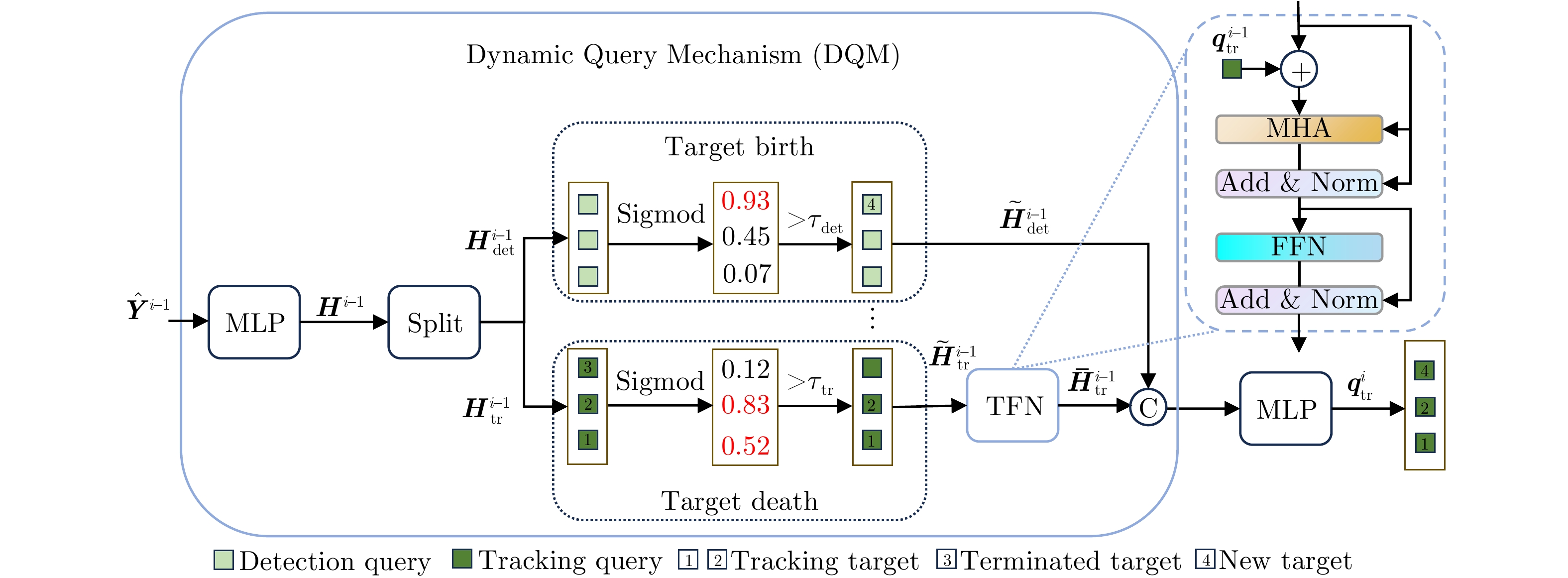
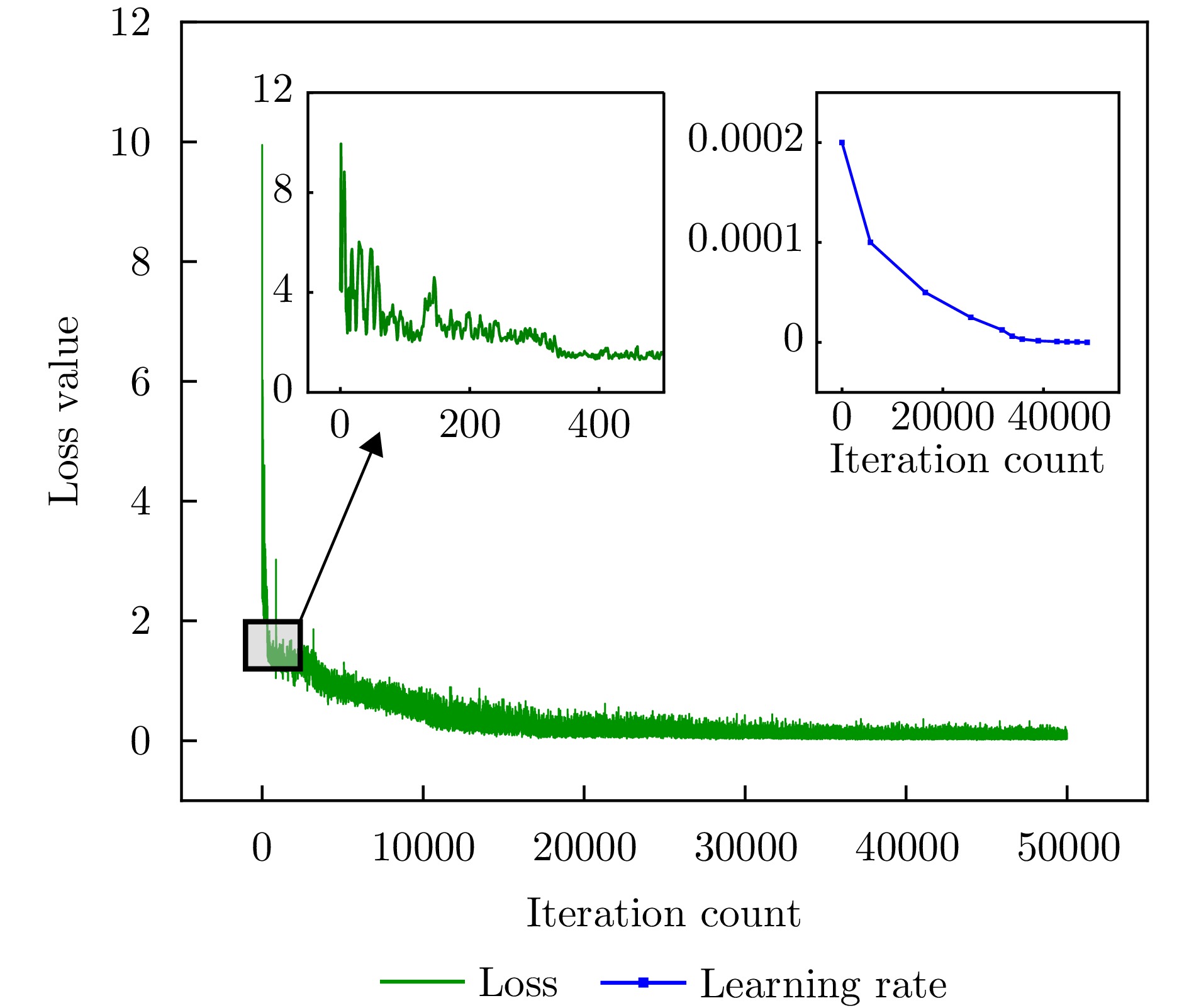
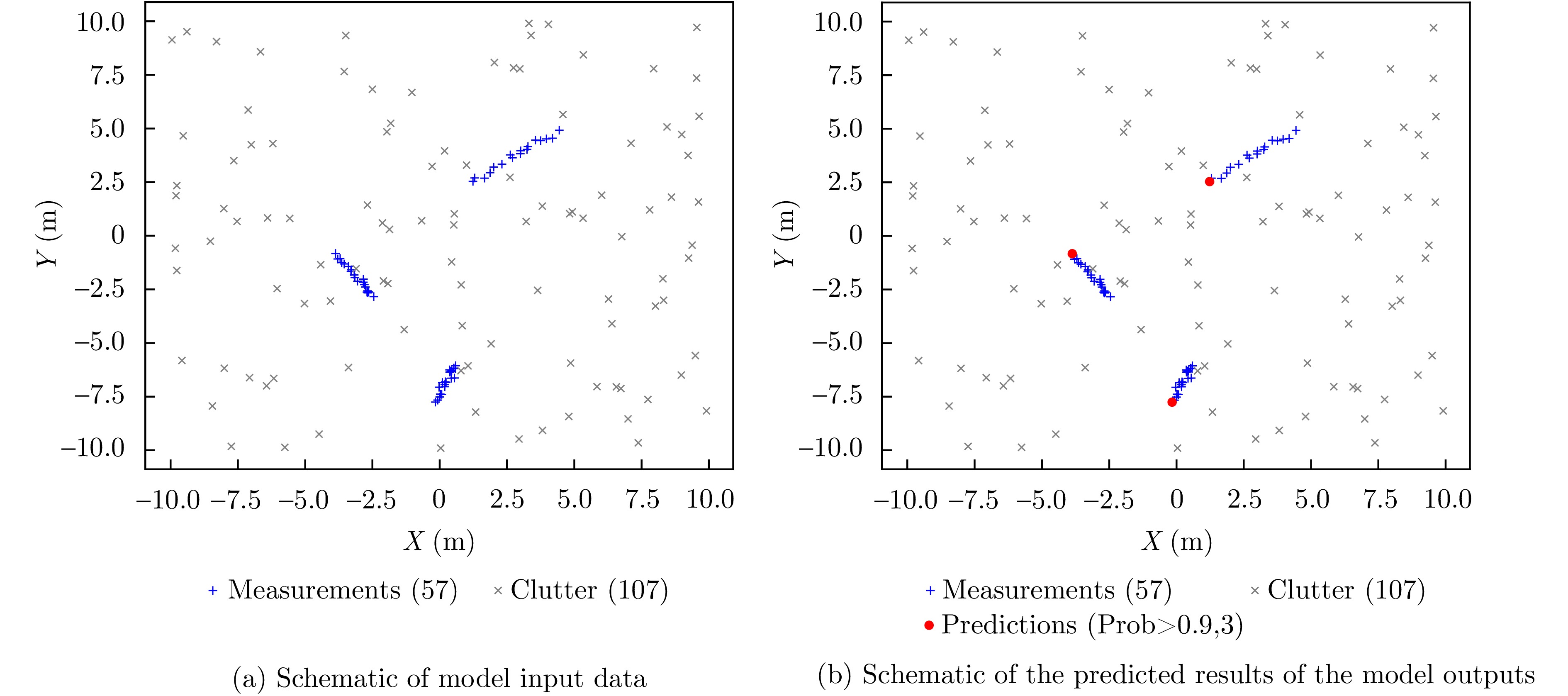
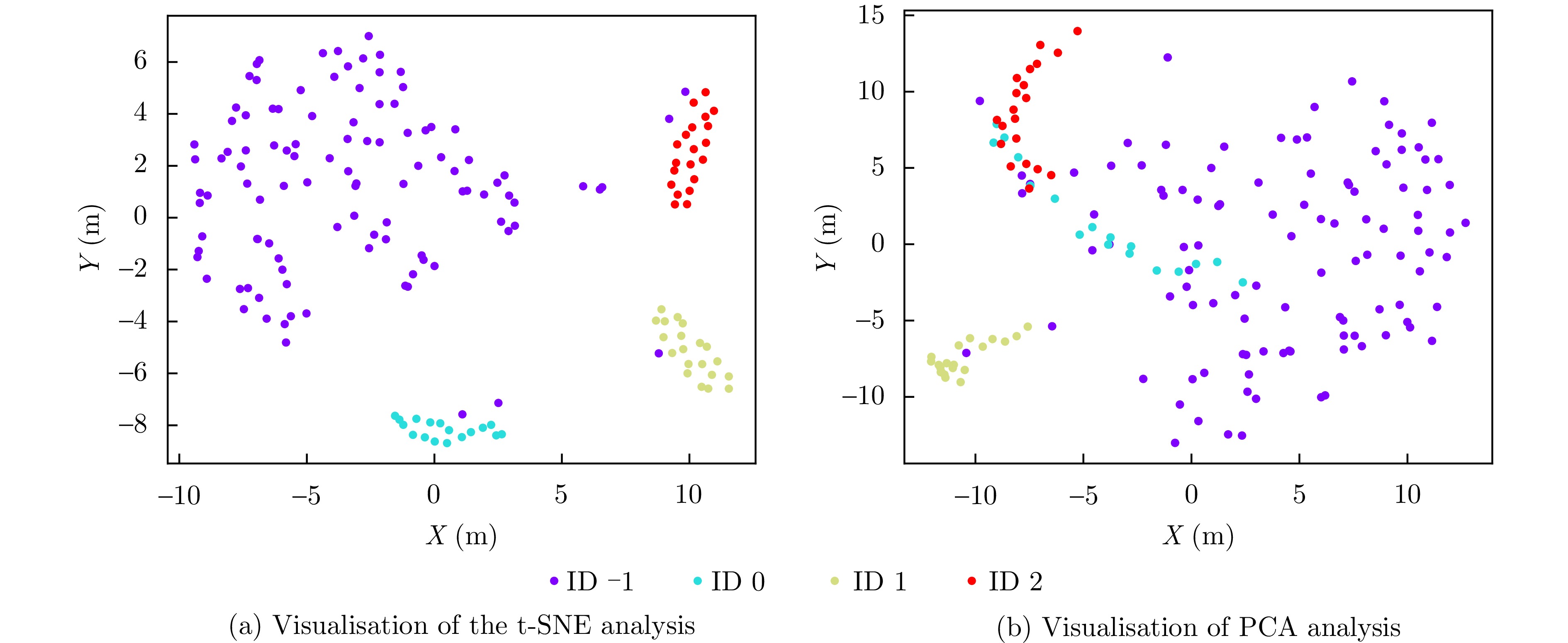
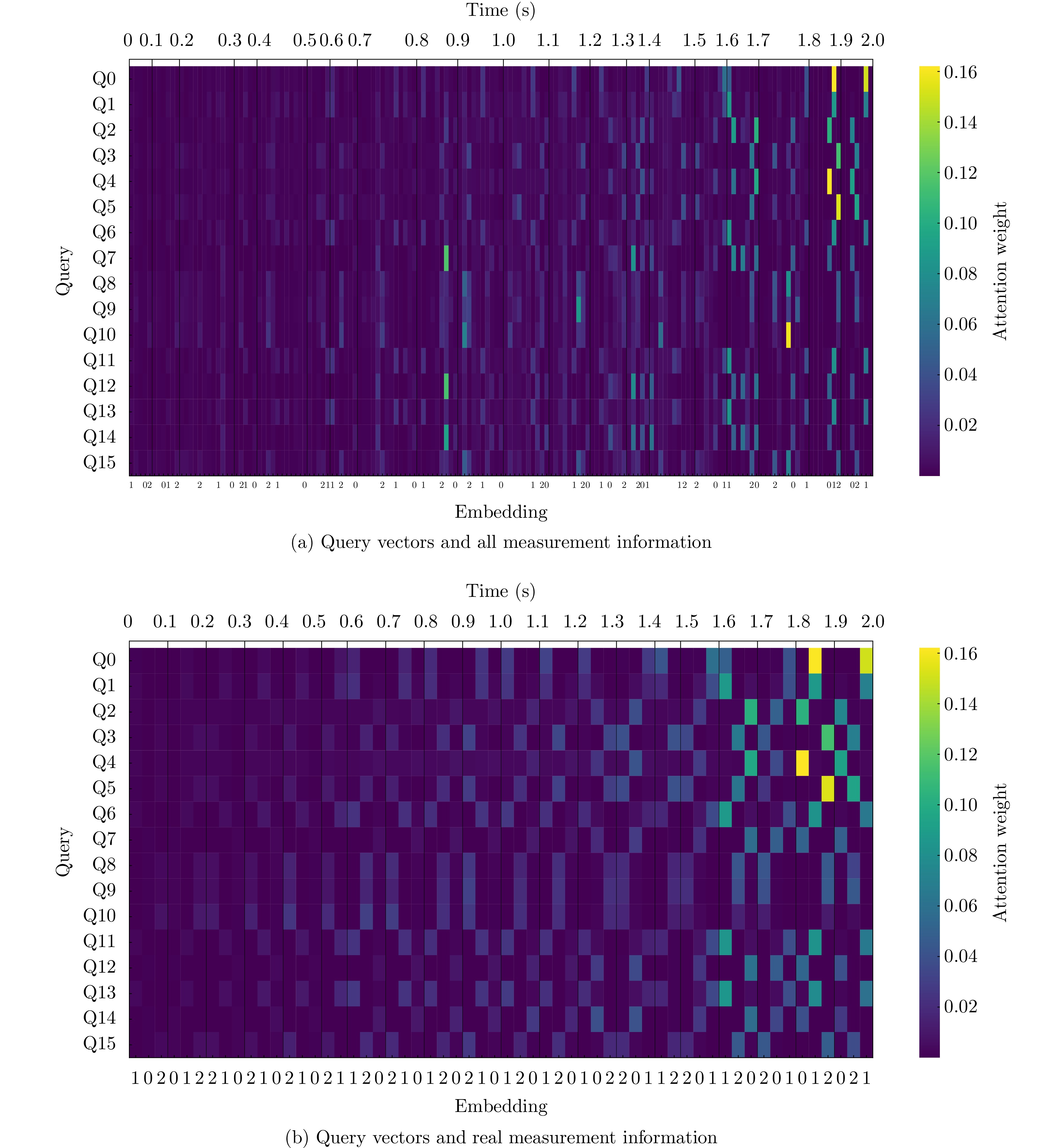
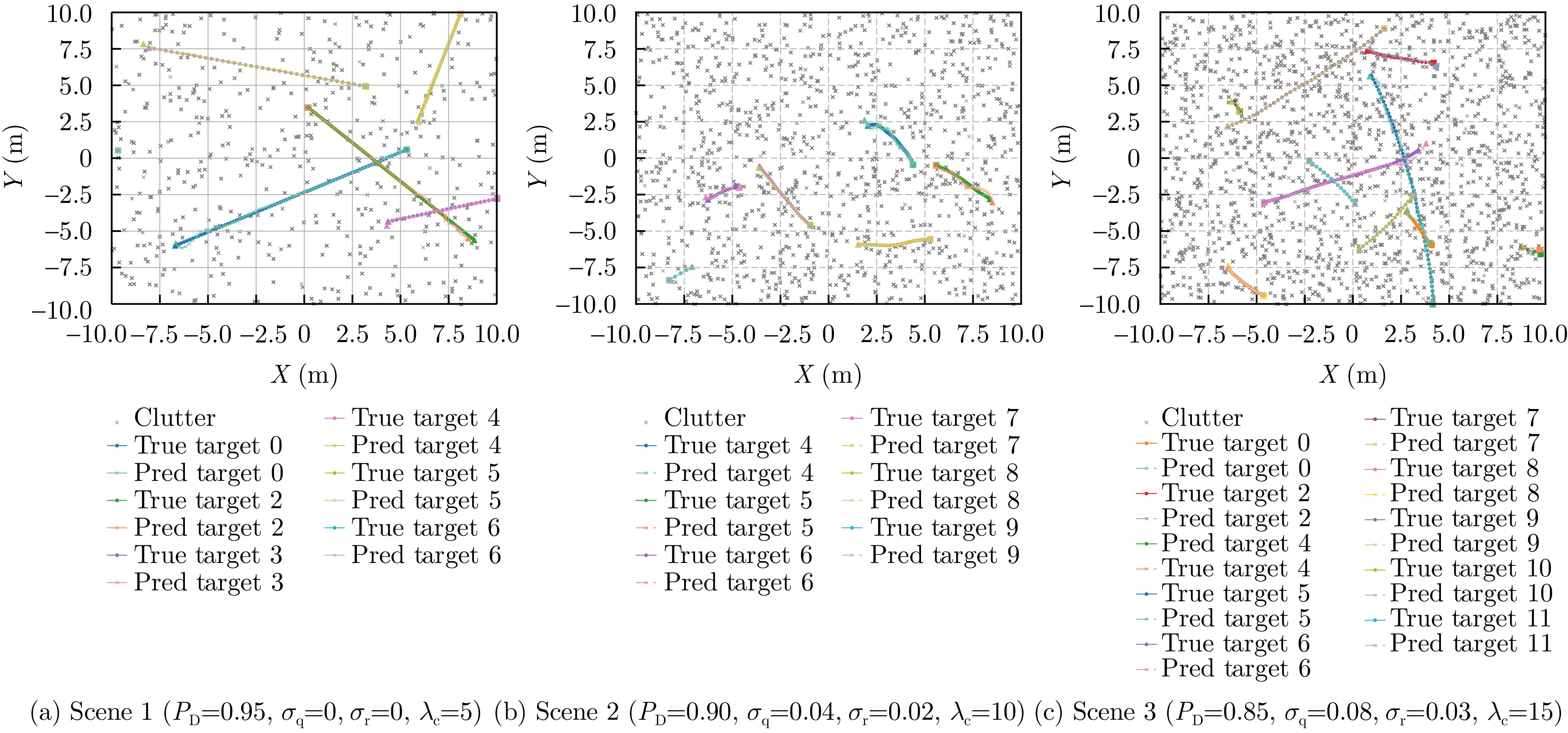
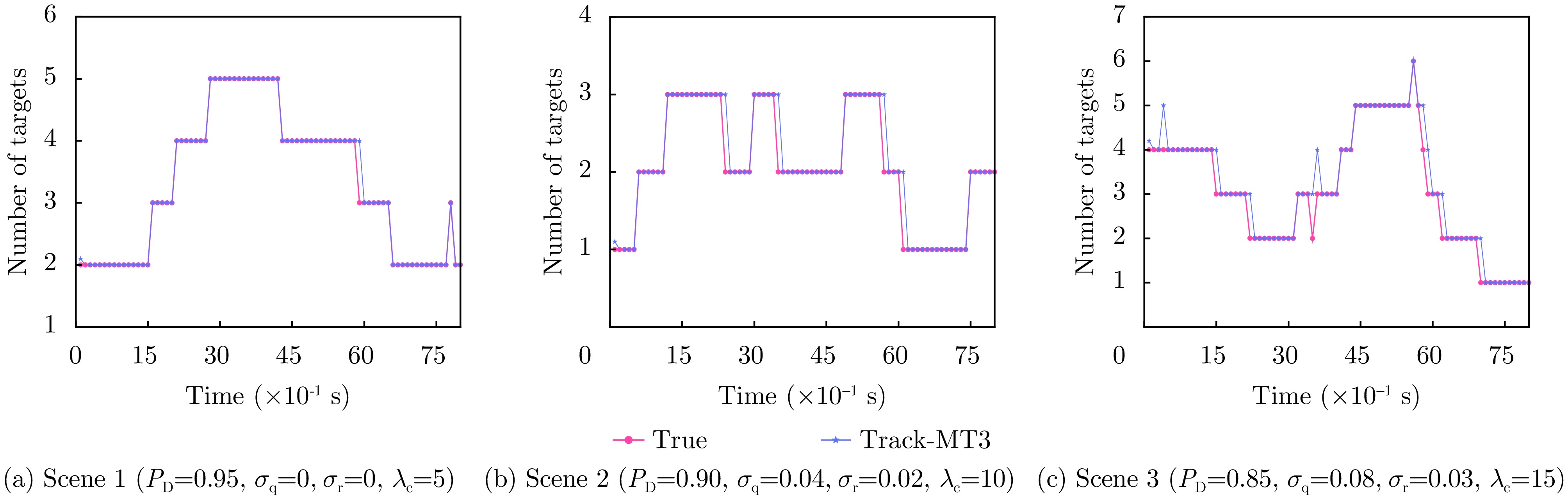
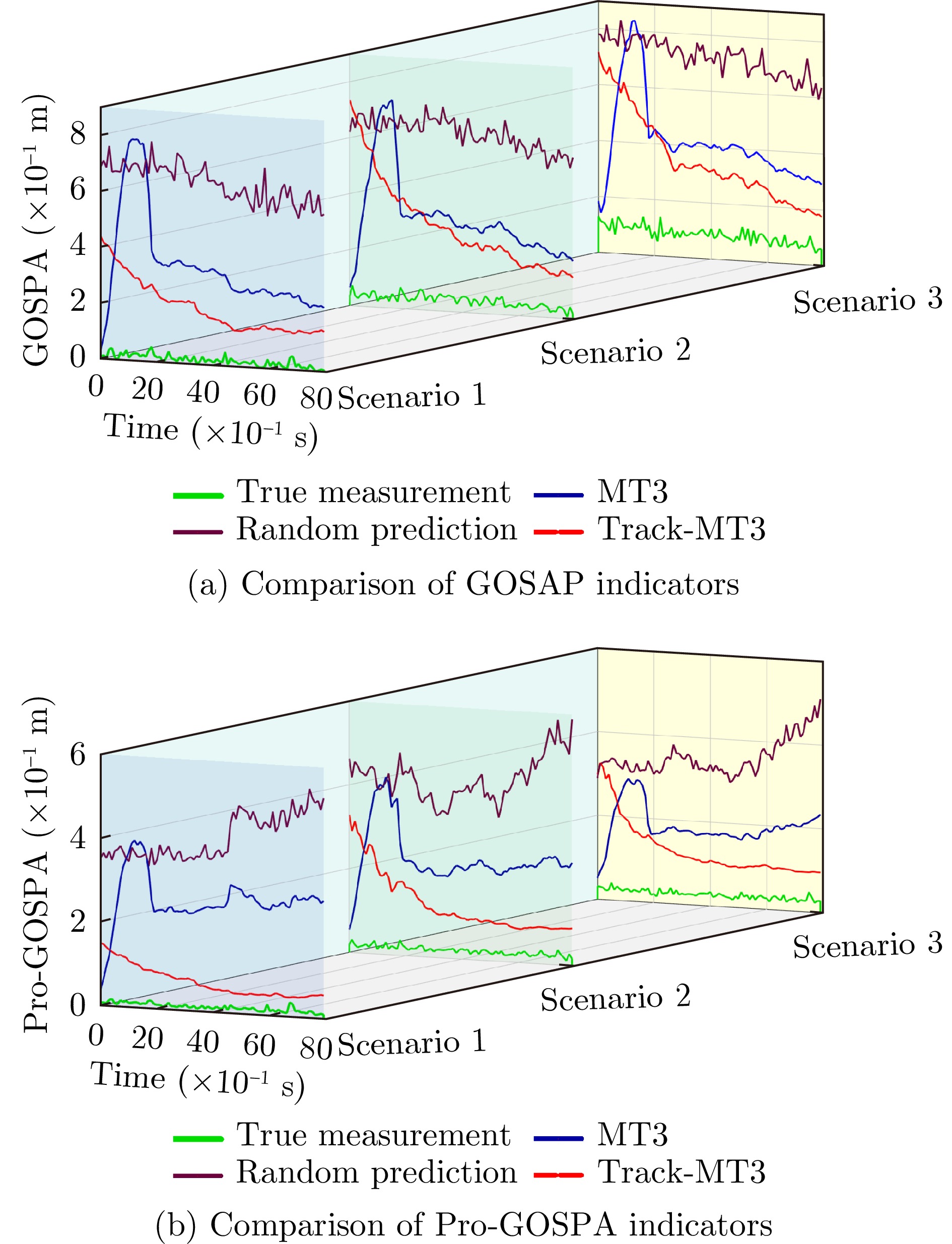
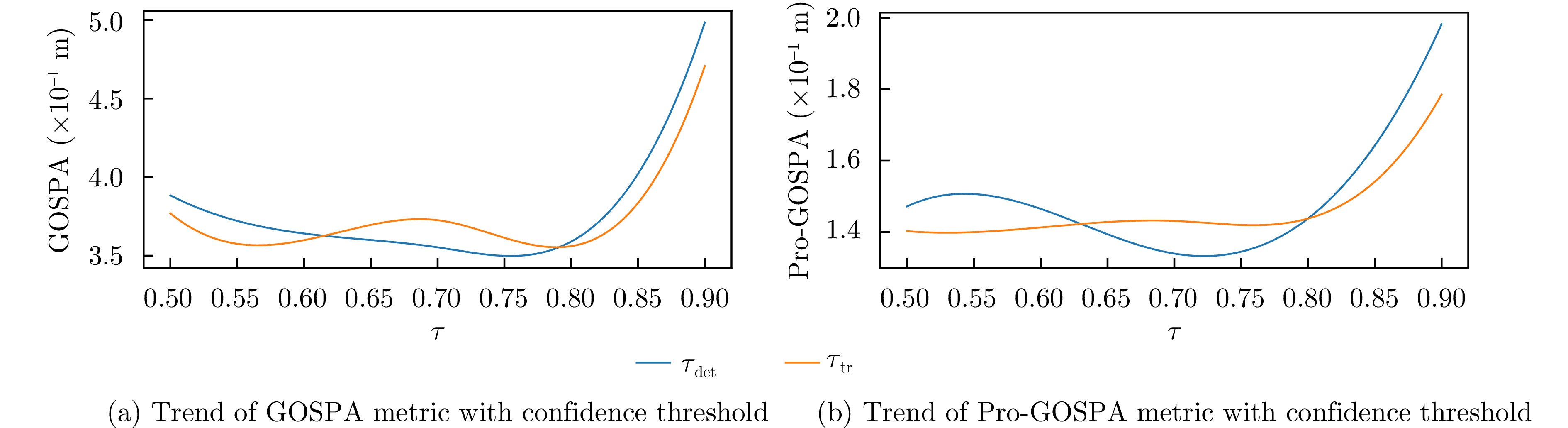
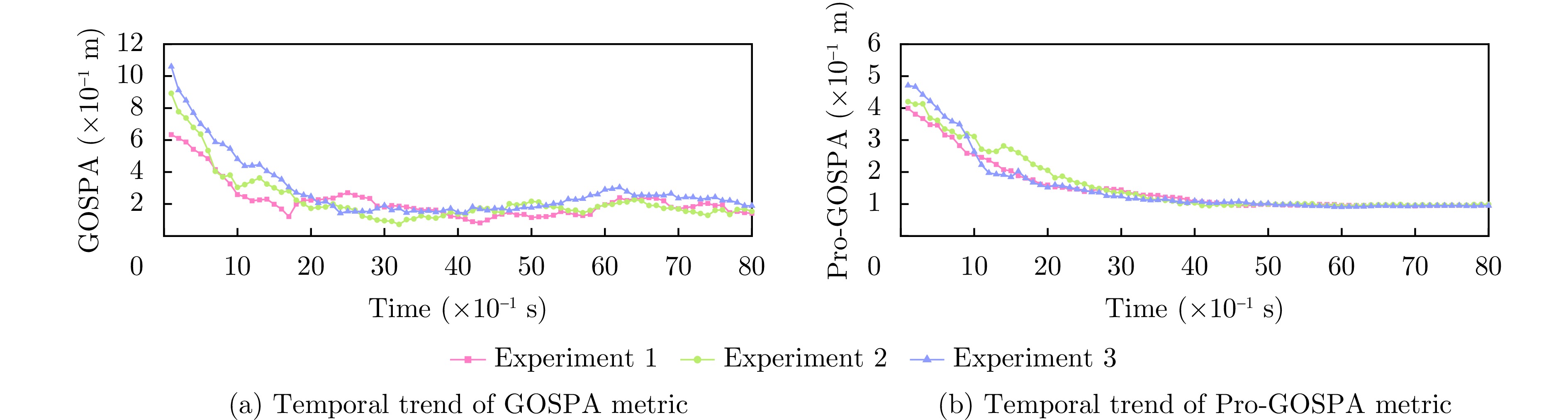
To address the challenges associated with the data association and stable long-term tracking of multiple targets in complex environments, this study proposes an innovative end-to-end multitarget tracking model called Track-MT3 based on a transformer network. First, a dual-query mechanism comprising detection and tracking queries is introduced to implicitly perform measurement-to-target data association and enable accurate target state estimation. Subsequently, a cross-frame target alignment strategy is employed to enhance the temporal continuity of tracking trajectories, ensuring consistent target identities across frames. In addition, a query transformation and temporal feature encoding module is designed to improve target motion pattern modeling by adaptively combining target dynamics information at different time scales. During model training, a collective average loss function is adopted to achieve the global optimization of tracking performance, considering the entire tracking process in an end-to-end manner. Finally, the performance of Track-MT3 is extensively evaluated under various complex multitarget tracking scenarios using multiple metrics. Experimental results demonstrate that Track-MT3 exhibits superior long-term tracking performance than baseline methods such as MT3. Specifically, Track-MT3 achieves overall performance improvements of 6% and 20% against JPDA and MHT, respectively. By effectively exploiting temporal information, Track-MT3 ensures stable and robust multitarget tracking in complex dynamic environments.
To address the challenges associated with the data association and stable long-term tracking of multiple targets in complex environments, this study proposes an innovative end-to-end multitarget tracking model called Track-MT3 based on a transformer network. First, a dual-query mechanism comprising detection and tracking queries is introduced to implicitly perform measurement-to-target data association and enable accurate target state estimation. Subsequently, a cross-frame target alignment strategy is employed to enhance the temporal continuity of tracking trajectories, ensuring consistent target identities across frames. In addition, a query transformation and temporal feature encoding module is designed to improve target motion pattern modeling by adaptively combining target dynamics information at different time scales. During model training, a collective average loss function is adopted to achieve the global optimization of tracking performance, considering the entire tracking process in an end-to-end manner. Finally, the performance of Track-MT3 is extensively evaluated under various complex multitarget tracking scenarios using multiple metrics. Experimental results demonstrate that Track-MT3 exhibits superior long-term tracking performance than baseline methods such as MT3. Specifically, Track-MT3 achieves overall performance improvements of 6% and 20% against JPDA and MHT, respectively. By effectively exploiting temporal information, Track-MT3 ensures stable and robust multitarget tracking in complex dynamic environments.





2024, 13(6): 1220-1238.
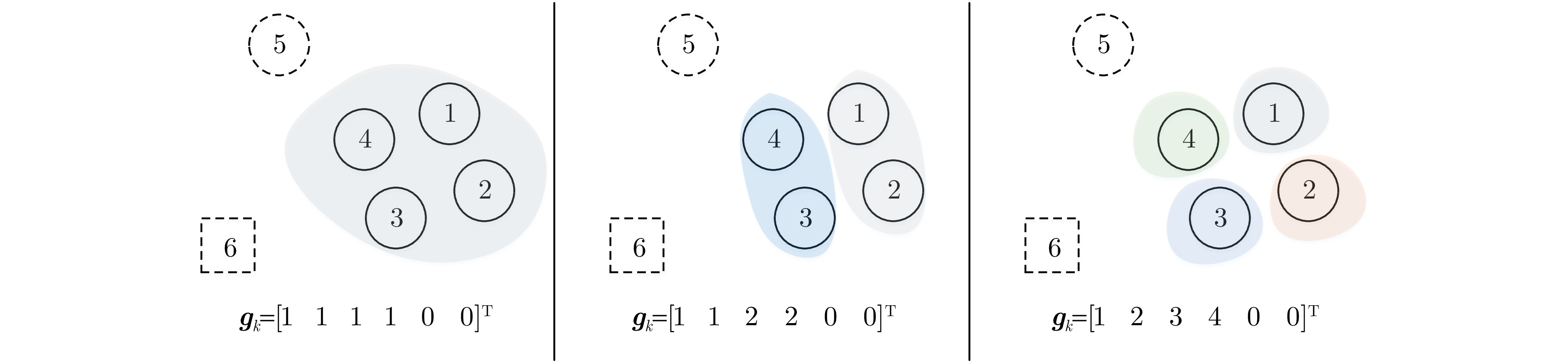
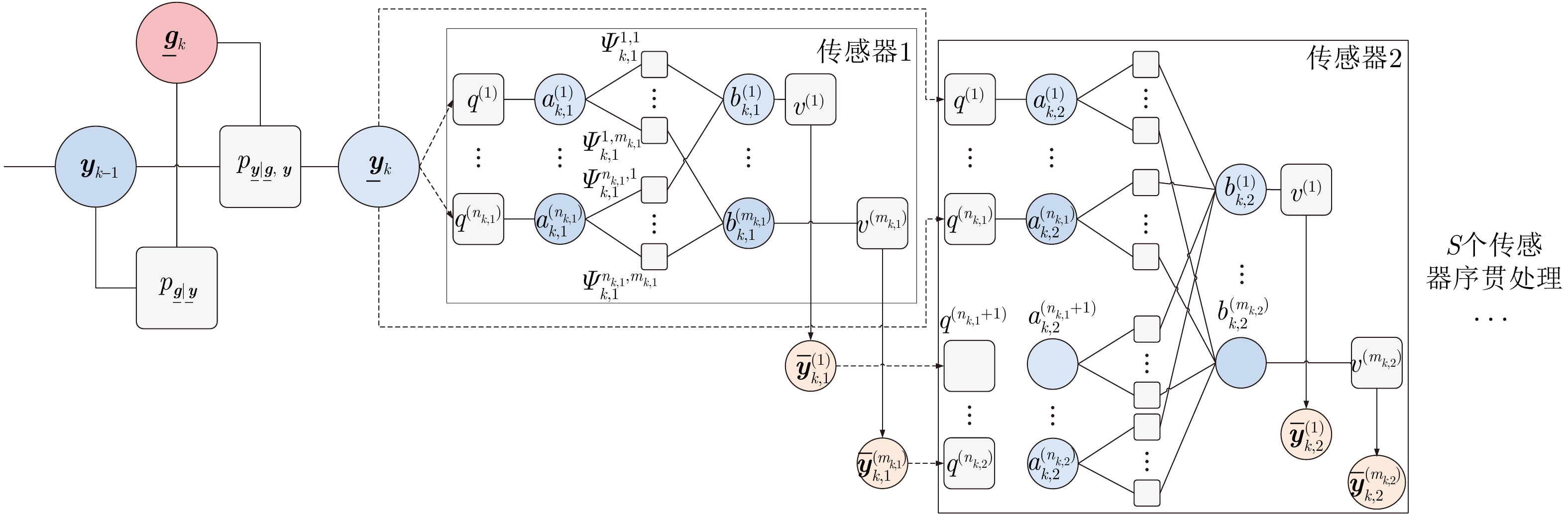
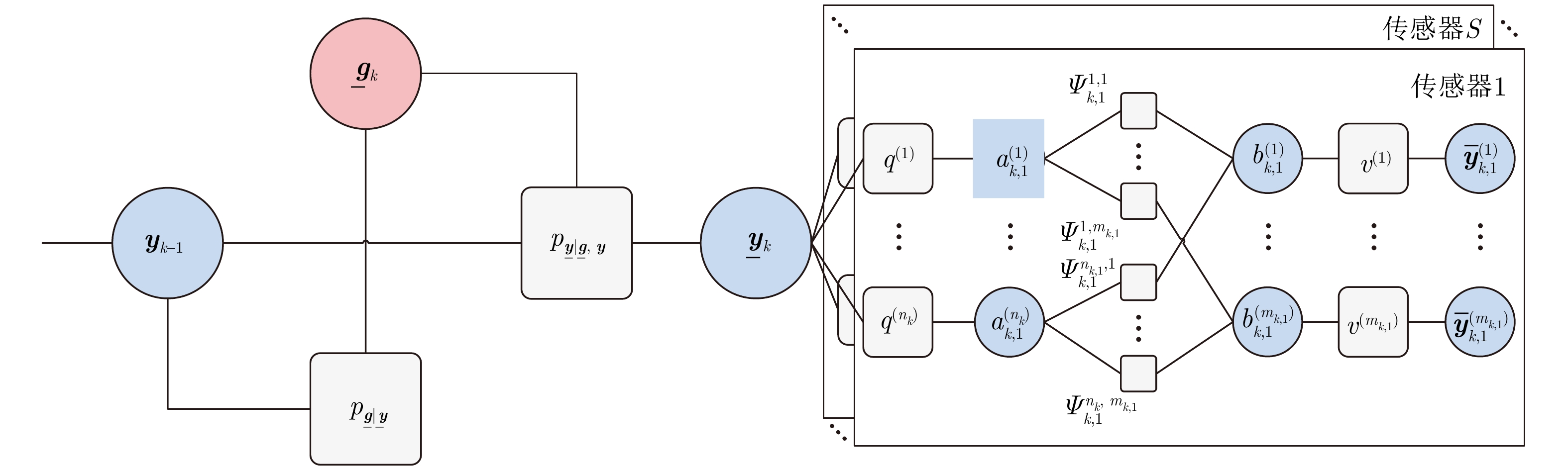
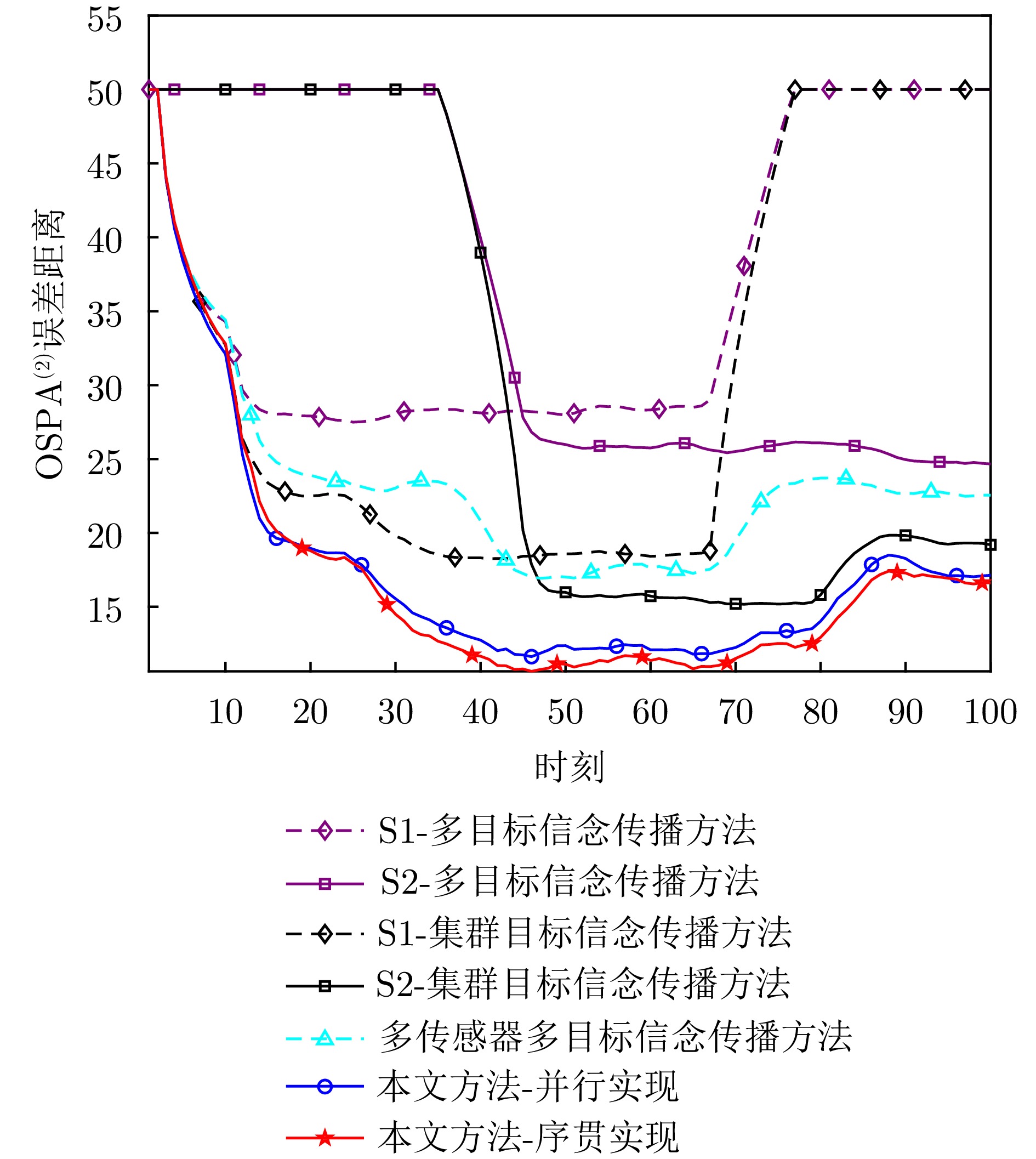
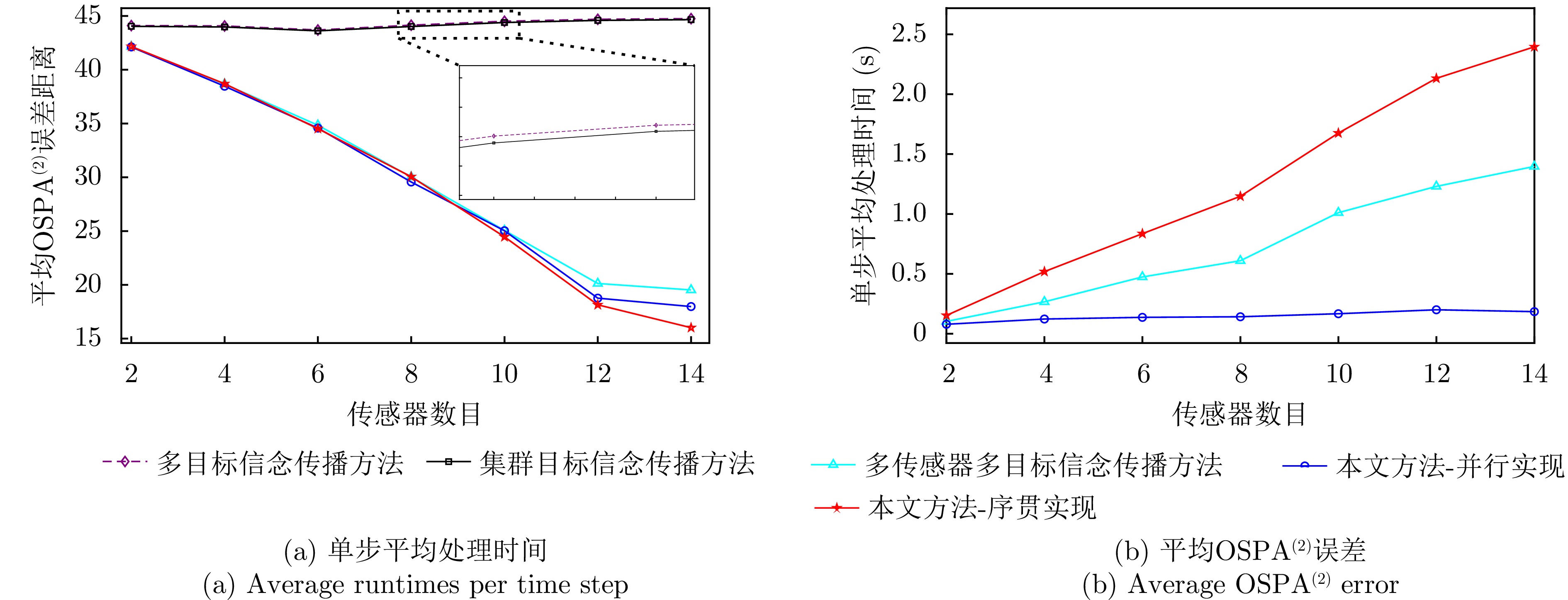
In practical applications, the field of view and computation resources of an individual sensor are limited, and the development and application of multisensor networks provide more possibilities for solving challenging target tracking problems. Compared with multitarget tracking, group target tracking encounters more challenging data association and computation problems due to factors such as the proximity of targets within groups, coordinated motions, a large number of involved targets, and group splitting and merging, which will be further complicated in the multisensor fusion systems. For group target trackingunder sensors with limited field of view, we propose a scalable multisensor group target tracking method via belief propagation. Within the Bayesian framework, the method considers the uncertainty of the group structure, constructs the decomposition of the joint posterior probability density of the multisensor group targets and corresponding factor graph, and efficiently solves the data association problem by running belief propagation on the devised factor graph. Furthermore, the method has excellent scalability and low computational complexity, scaling linearly only on the numbers of sensors, preserved group partitions, and sensor measurements, and scaling quadratically on the number of targets. Finally, simulation experiments compare the performance of different methods on GOSPA and OSPA(2), which verify that the proposed method can seamlessly track grouped and ungrouped targets, fully utilize the complementary information among sensors, and improve tracking accuracy.
In practical applications, the field of view and computation resources of an individual sensor are limited, and the development and application of multisensor networks provide more possibilities for solving challenging target tracking problems. Compared with multitarget tracking, group target tracking encounters more challenging data association and computation problems due to factors such as the proximity of targets within groups, coordinated motions, a large number of involved targets, and group splitting and merging, which will be further complicated in the multisensor fusion systems. For group target trackingunder sensors with limited field of view, we propose a scalable multisensor group target tracking method via belief propagation. Within the Bayesian framework, the method considers the uncertainty of the group structure, constructs the decomposition of the joint posterior probability density of the multisensor group targets and corresponding factor graph, and efficiently solves the data association problem by running belief propagation on the devised factor graph. Furthermore, the method has excellent scalability and low computational complexity, scaling linearly only on the numbers of sensors, preserved group partitions, and sensor measurements, and scaling quadratically on the number of targets. Finally, simulation experiments compare the performance of different methods on GOSPA and OSPA(2), which verify that the proposed method can seamlessly track grouped and ungrouped targets, fully utilize the complementary information among sensors, and improve tracking accuracy.








2024, 13(6): 1239-1251.
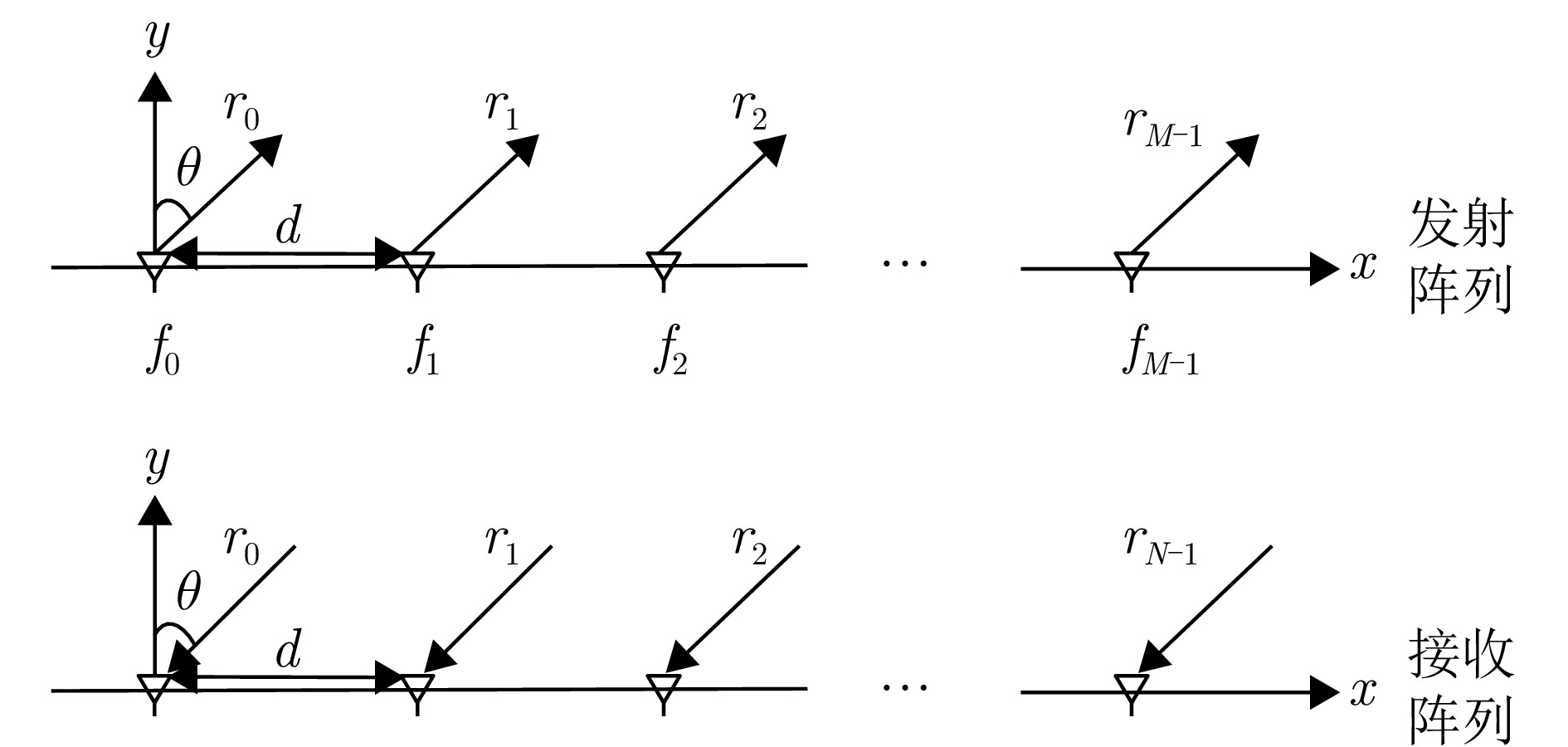
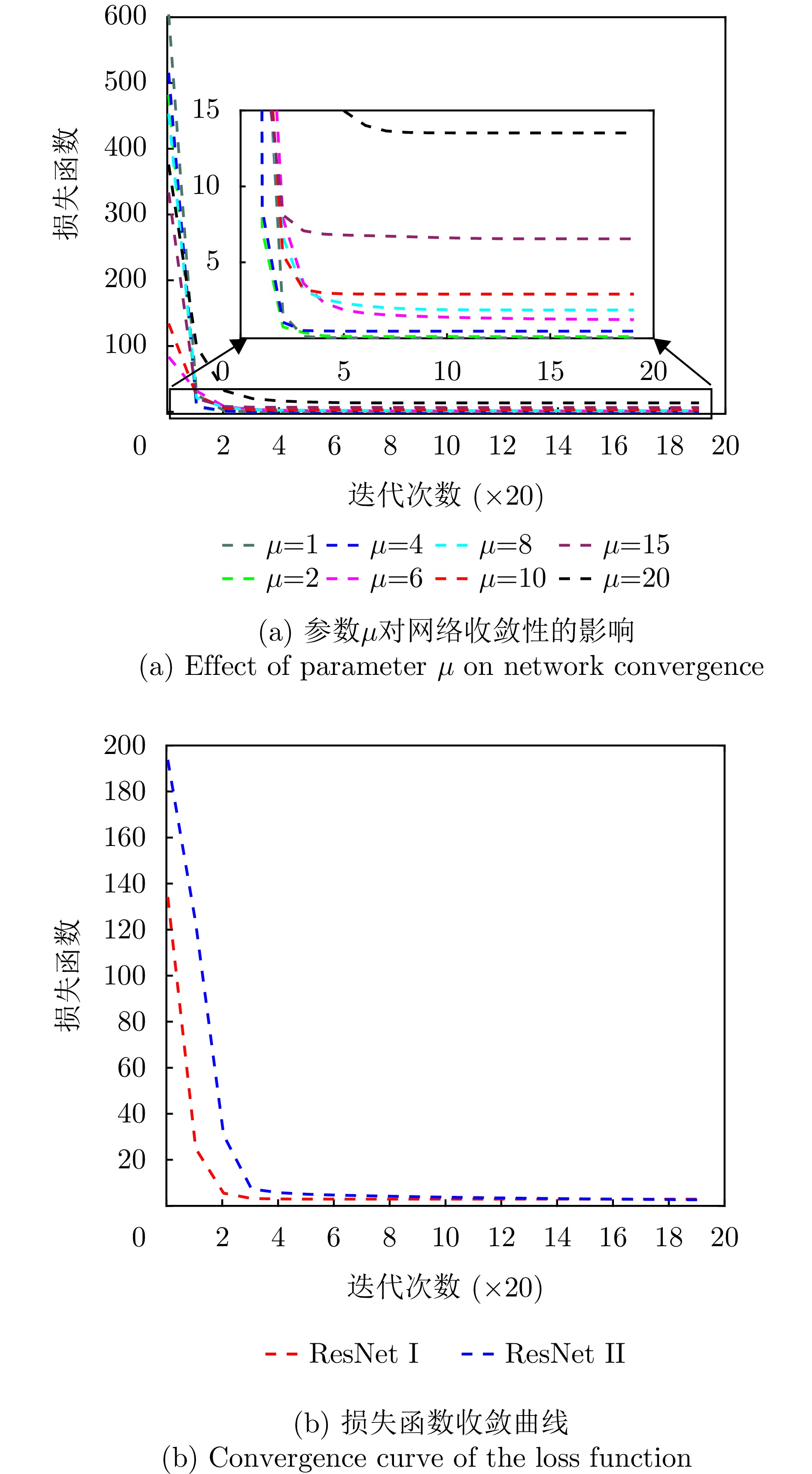
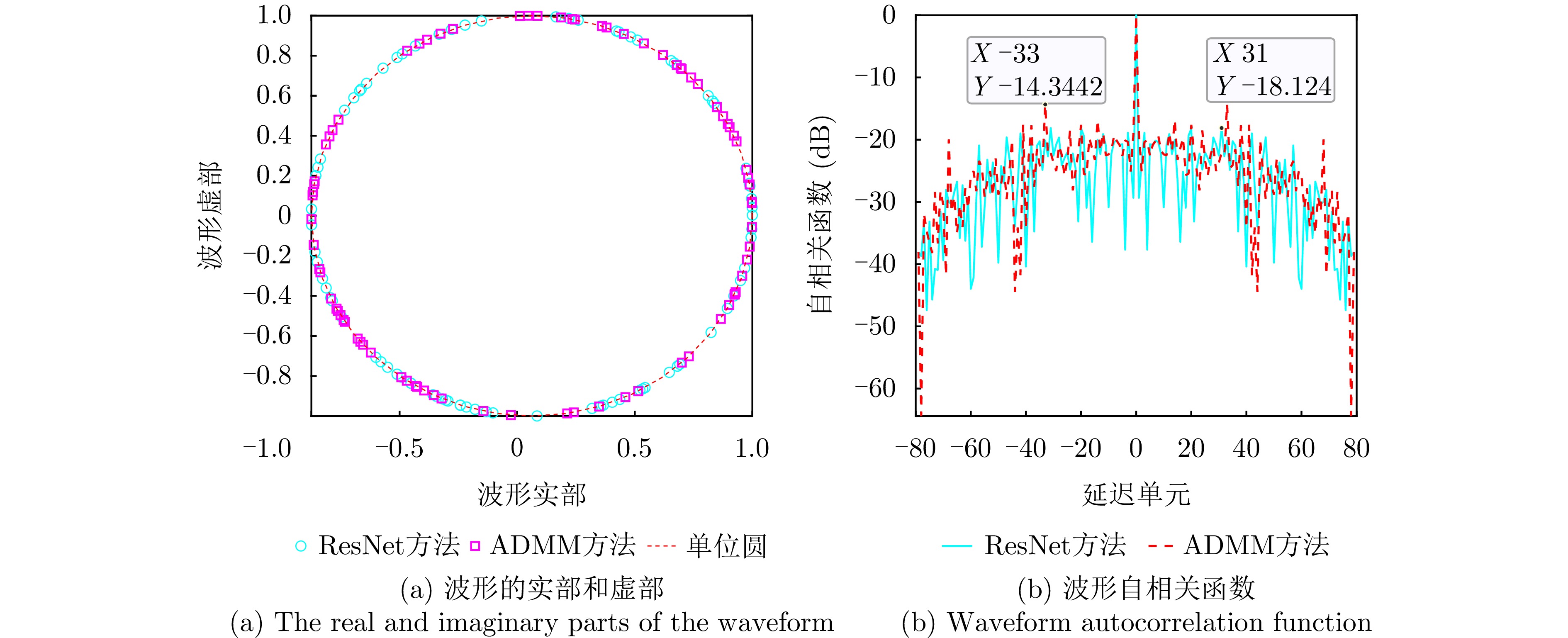
Traditional Low Probability of Intercept (LPI) array radars that use phased array or Multiple-Input Multiple-Output (MIMO) systems face limitations in terms of controlling radiation energy only at specific angles and cannot achieve energy control over specific areas of range and angle. To address these issues, this paper proposes an LPI waveform design method for Frequency Diverse Array (FDA)-MIMO radar utilizing neural networks. This method jointly designs the transmit waveform and receive beamforming in FDA-MIMO radars to ensure target detection probability while uniformly distributing radar energy across the spatial domain. This minimizes energy directed toward the target, thereby reducing the probability of the radar signal being intercepted. Initially, we formulate an optimization objective function aimed at LPI performance for transmitting waveform design and receiving beamforming by focusing on minimizing pattern matching errors. This function is then used as the loss function in a neural network. Through iterative training, the neural network minimizes this loss function until convergence, resulting in optimized transmit signal waveforms and solving the corresponding receive weighting vectors. Simulation results indicate that our proposed method significantly enhances radar power distribution control. Compared to traditional methods, it shows a 5 dB improvement in beam energy distribution control across nontarget regions of the transmit beam pattern. Furthermore, the receiver beam pattern achieves more concentrated energy, with deep nulls below −50 dB at multiple interference locations, demonstrating excellent interference suppression capabilities.
Traditional Low Probability of Intercept (LPI) array radars that use phased array or Multiple-Input Multiple-Output (MIMO) systems face limitations in terms of controlling radiation energy only at specific angles and cannot achieve energy control over specific areas of range and angle. To address these issues, this paper proposes an LPI waveform design method for Frequency Diverse Array (FDA)-MIMO radar utilizing neural networks. This method jointly designs the transmit waveform and receive beamforming in FDA-MIMO radars to ensure target detection probability while uniformly distributing radar energy across the spatial domain. This minimizes energy directed toward the target, thereby reducing the probability of the radar signal being intercepted. Initially, we formulate an optimization objective function aimed at LPI performance for transmitting waveform design and receiving beamforming by focusing on minimizing pattern matching errors. This function is then used as the loss function in a neural network. Through iterative training, the neural network minimizes this loss function until convergence, resulting in optimized transmit signal waveforms and solving the corresponding receive weighting vectors. Simulation results indicate that our proposed method significantly enhances radar power distribution control. Compared to traditional methods, it shows a 5 dB improvement in beam energy distribution control across nontarget regions of the transmit beam pattern. Furthermore, the receiver beam pattern achieves more concentrated energy, with deep nulls below −50 dB at multiple interference locations, demonstrating excellent interference suppression capabilities.









2024, 13(6): 1252-1278.
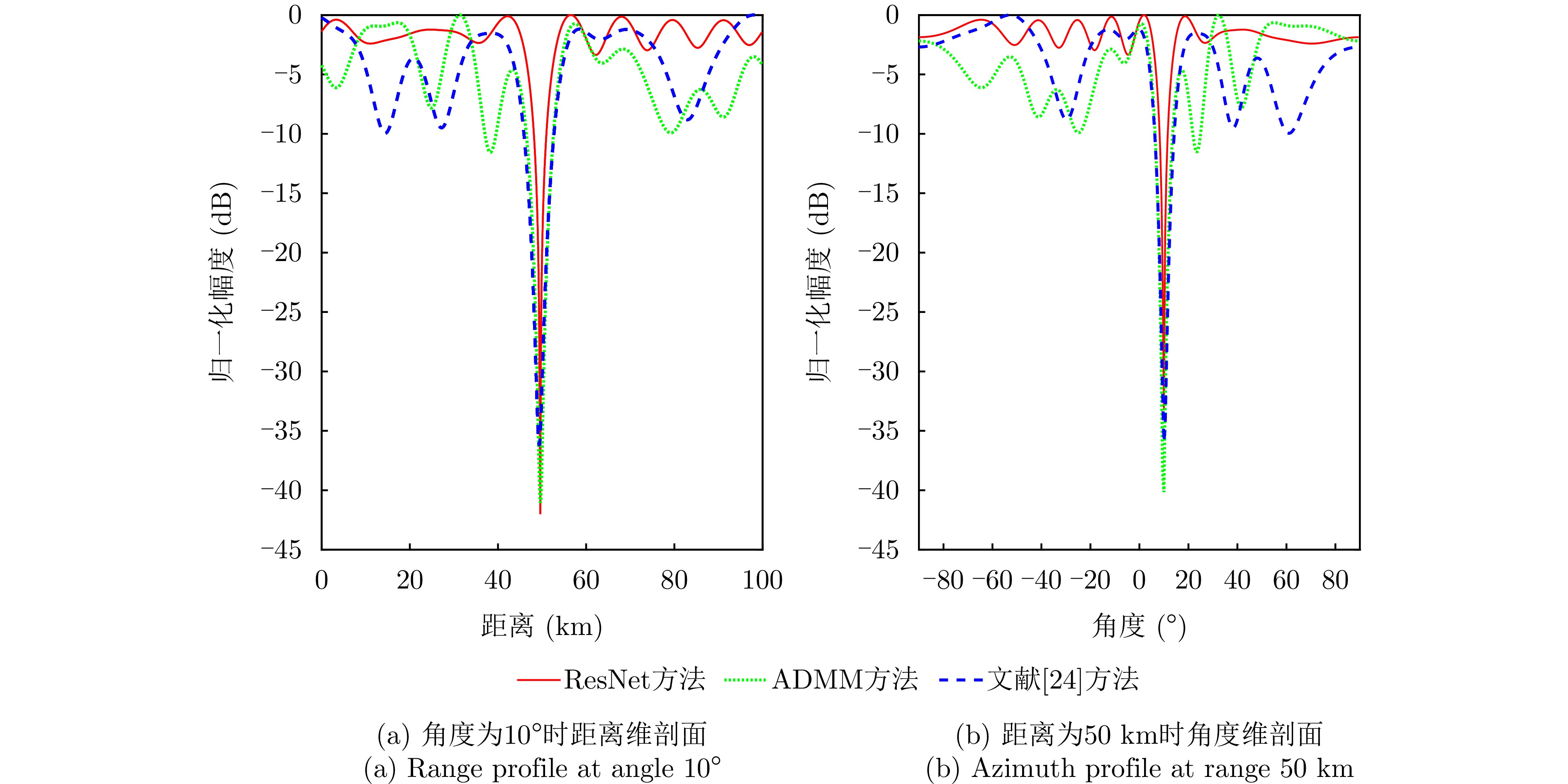
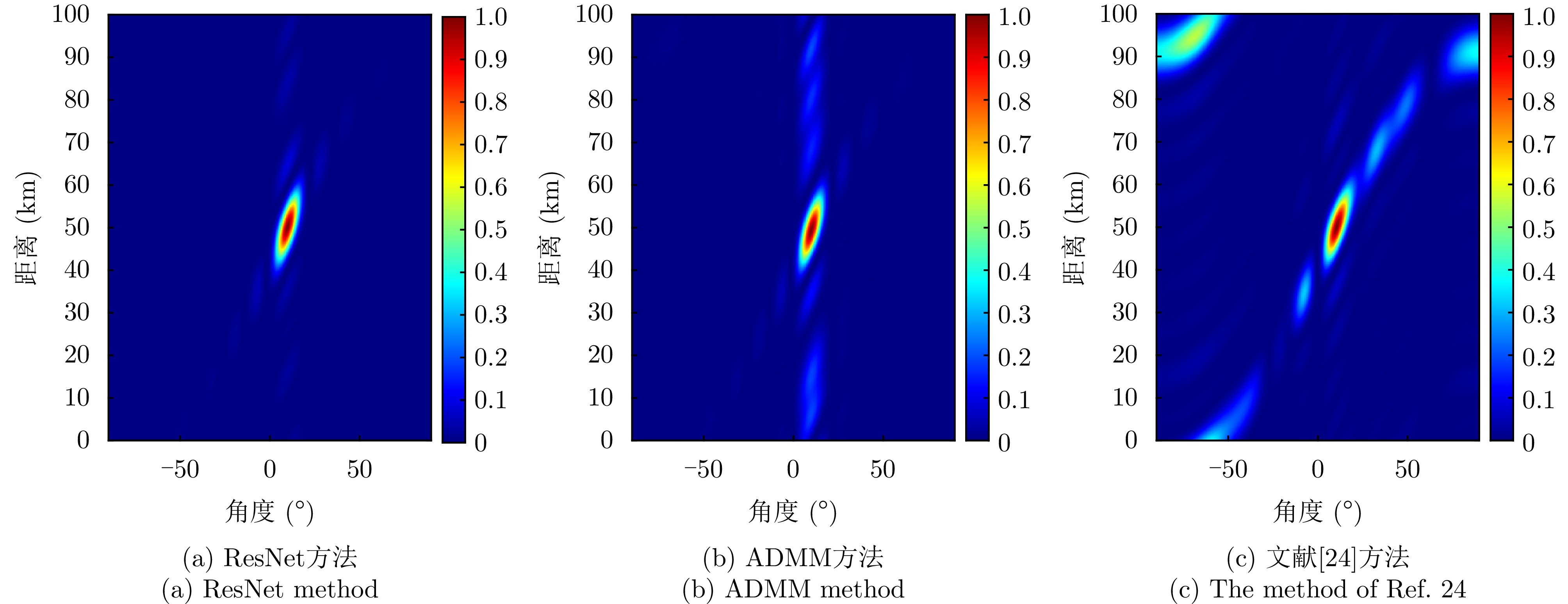
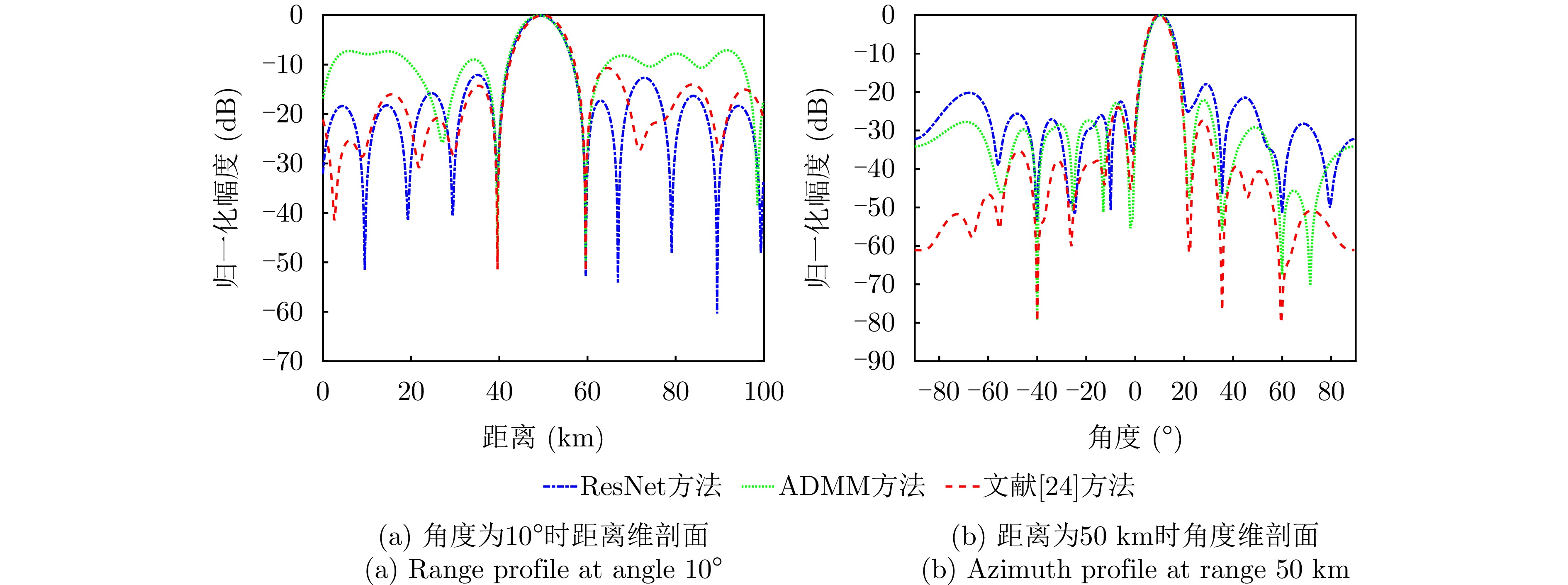
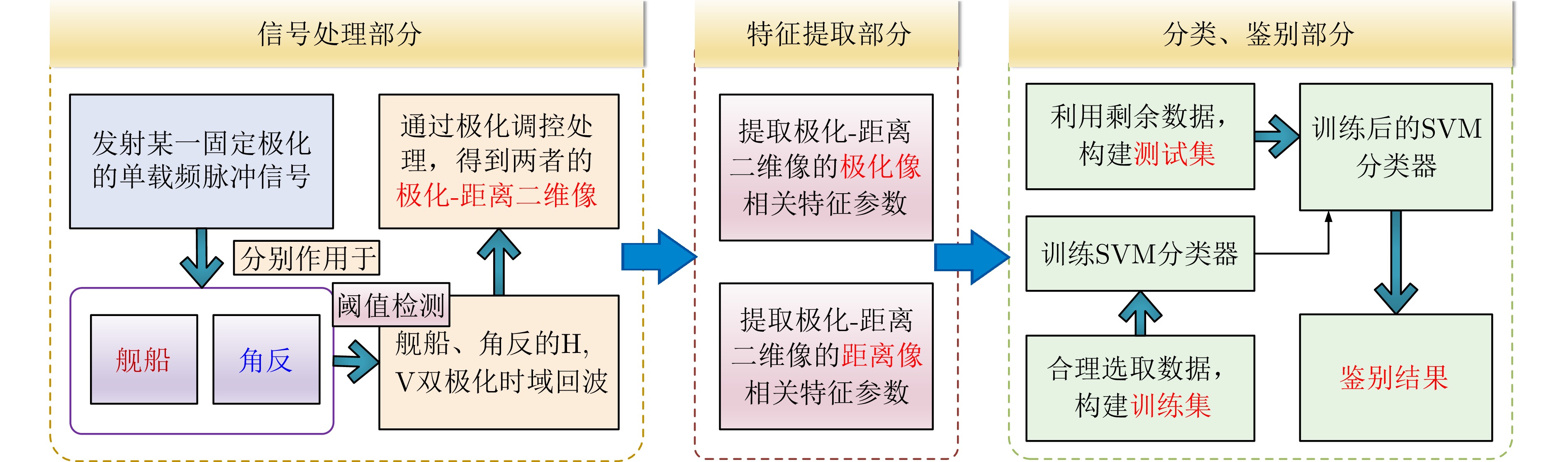
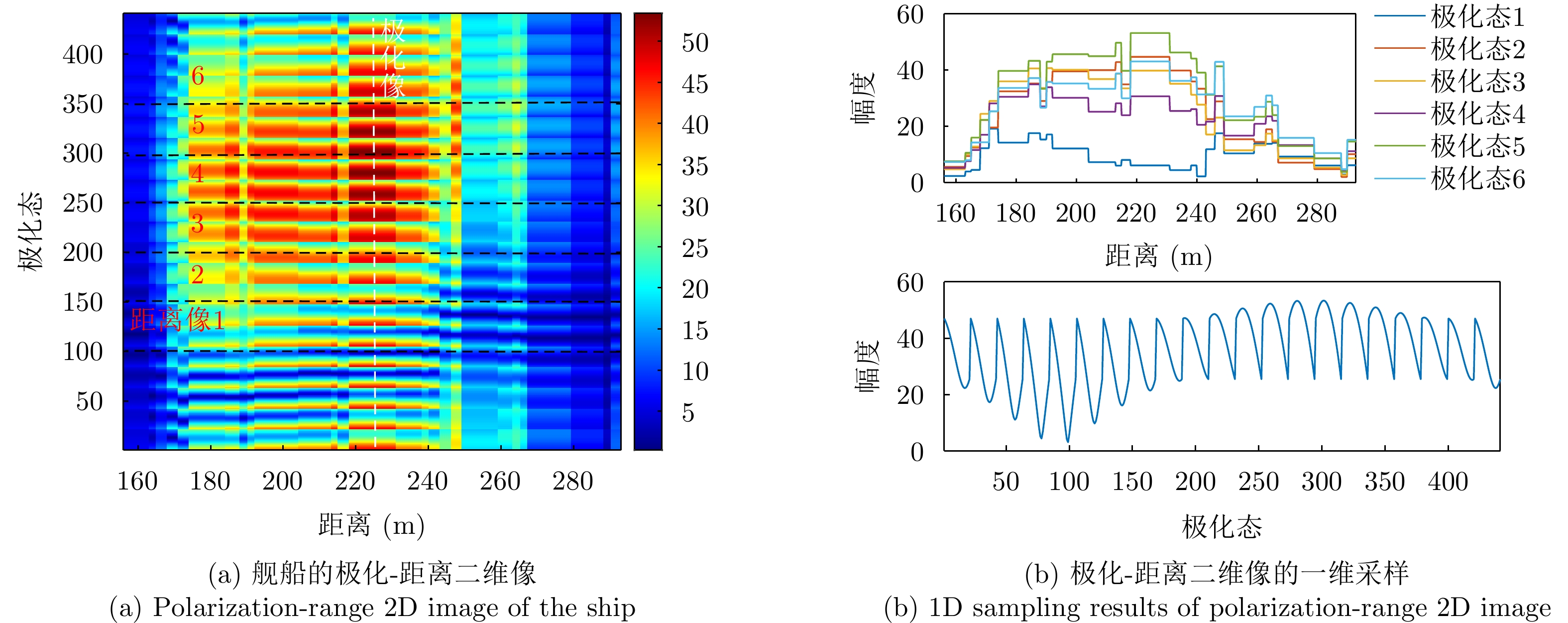
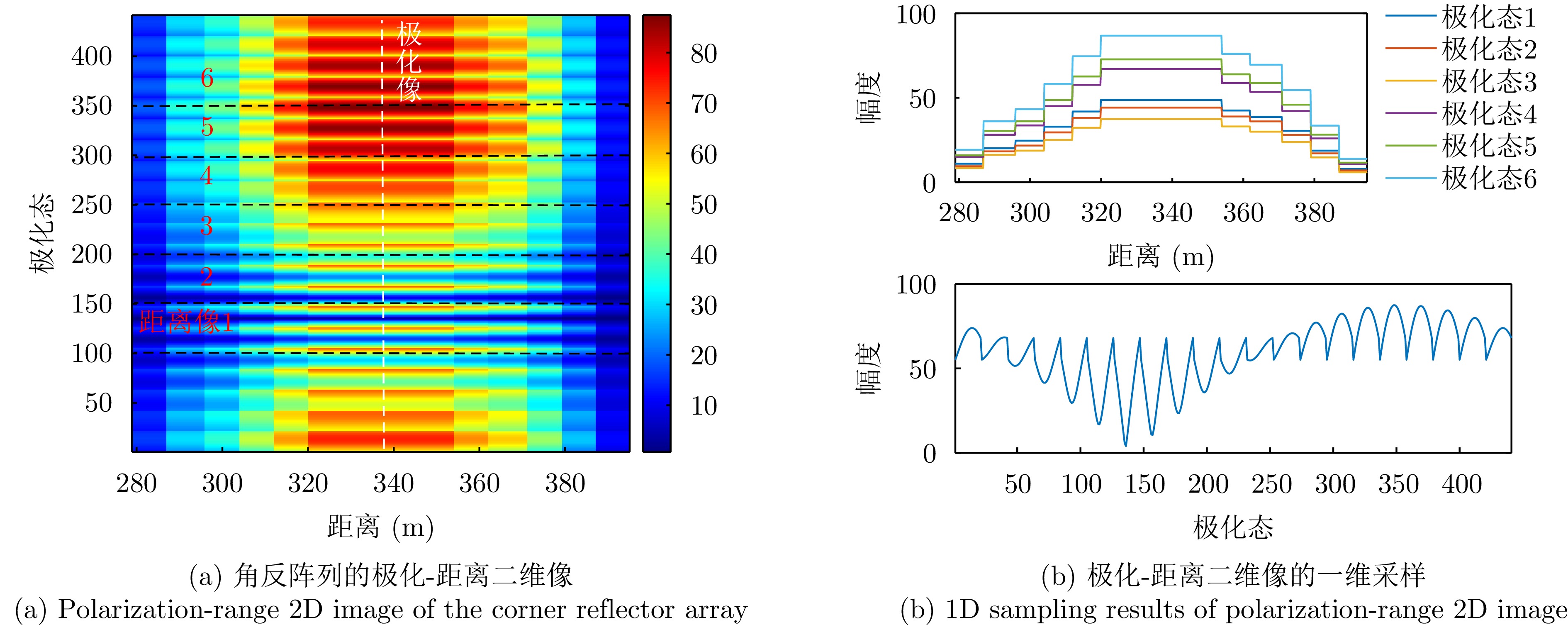
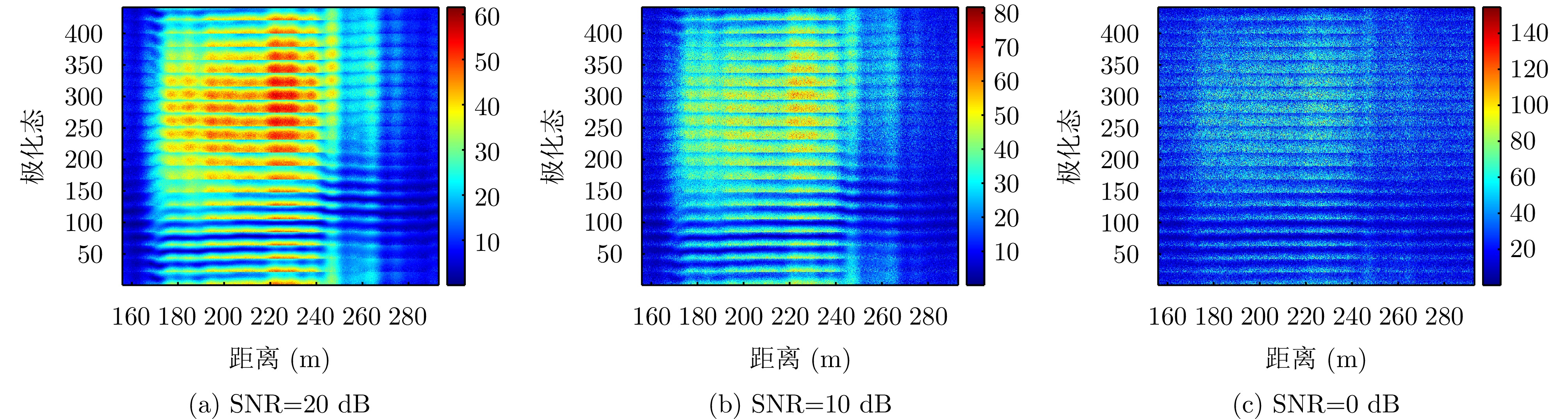
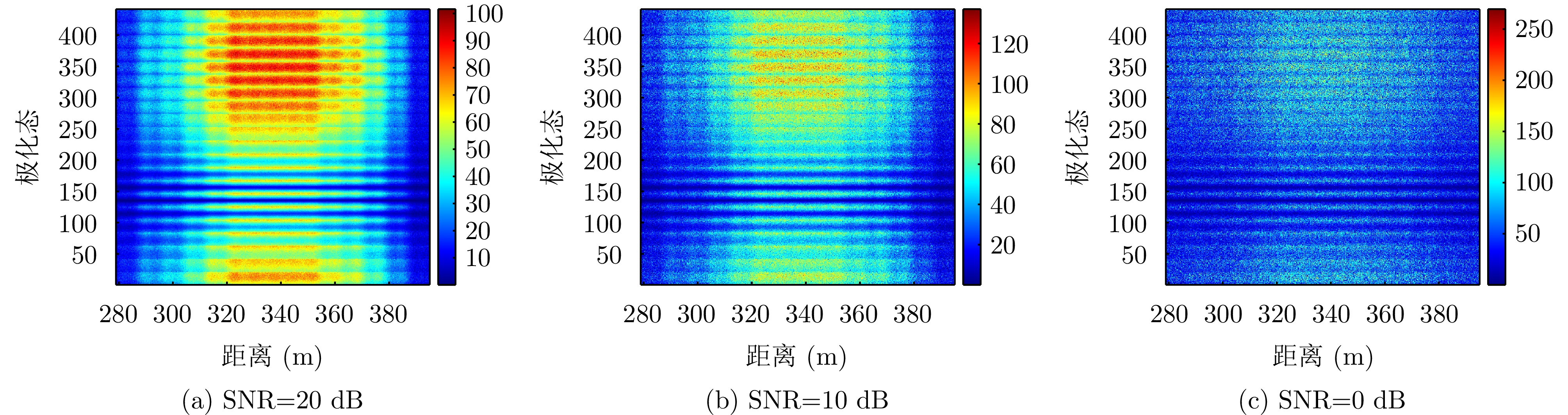
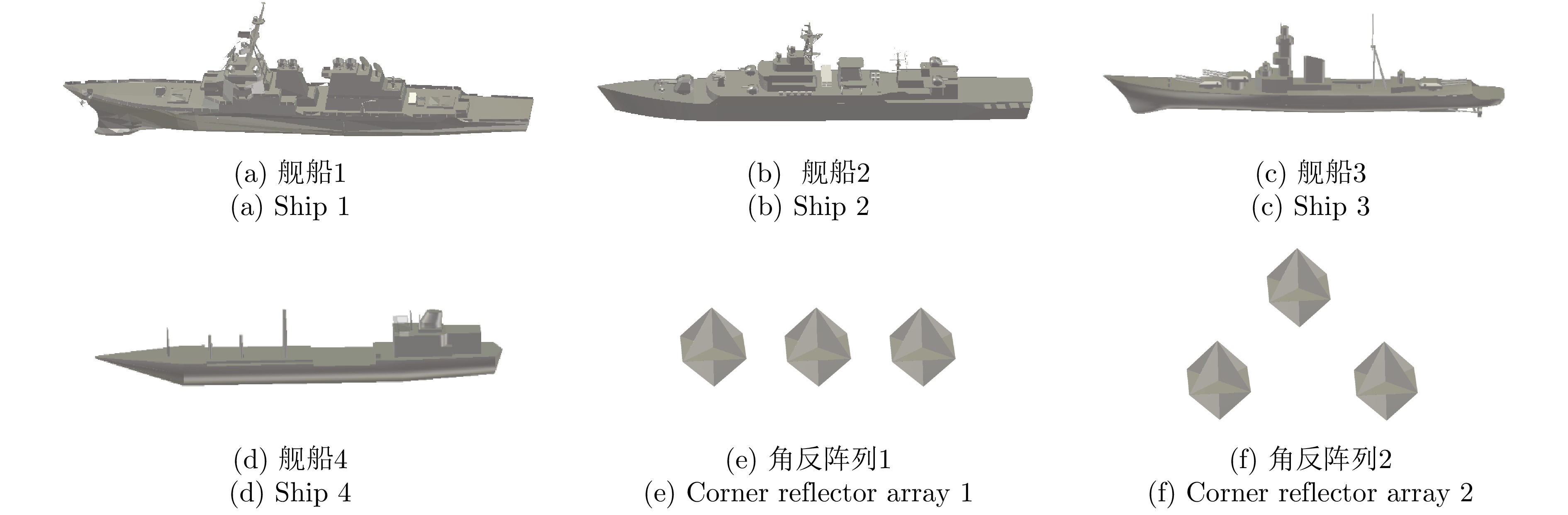
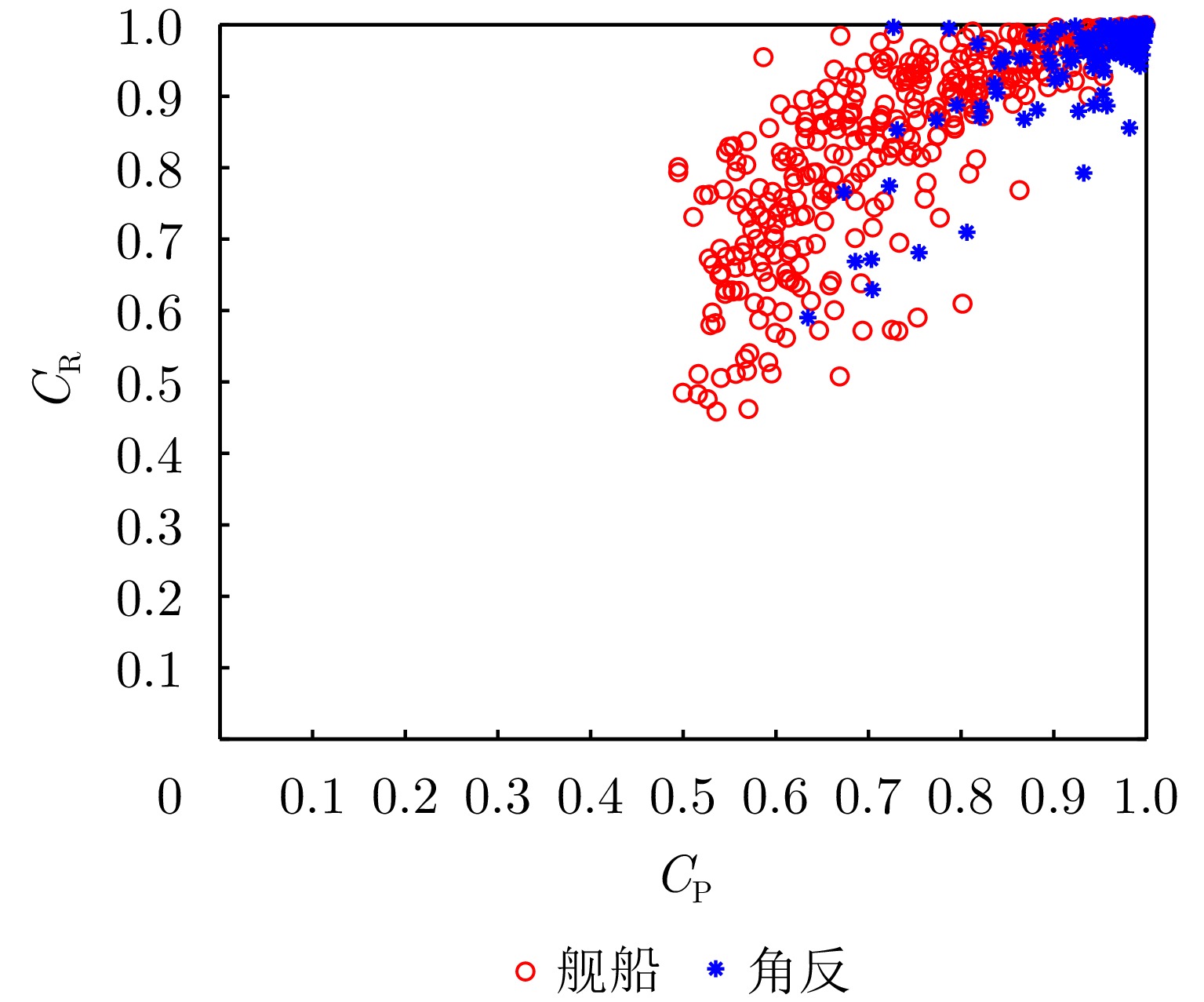
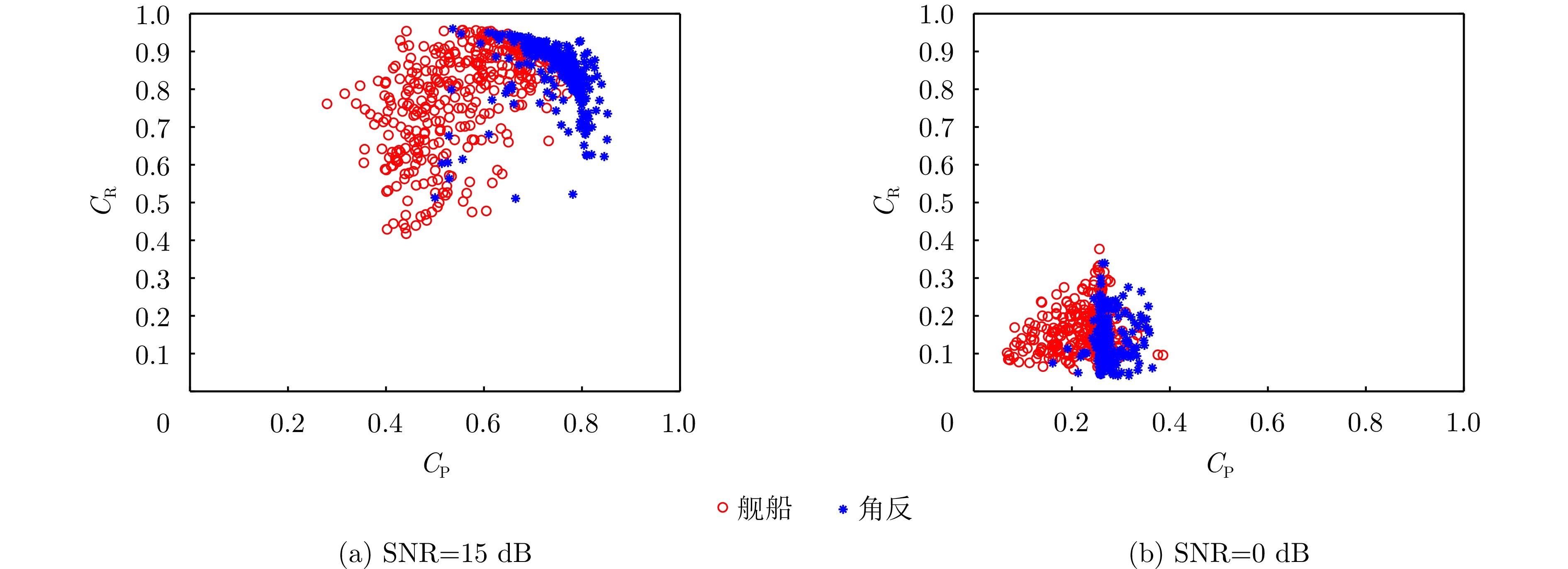
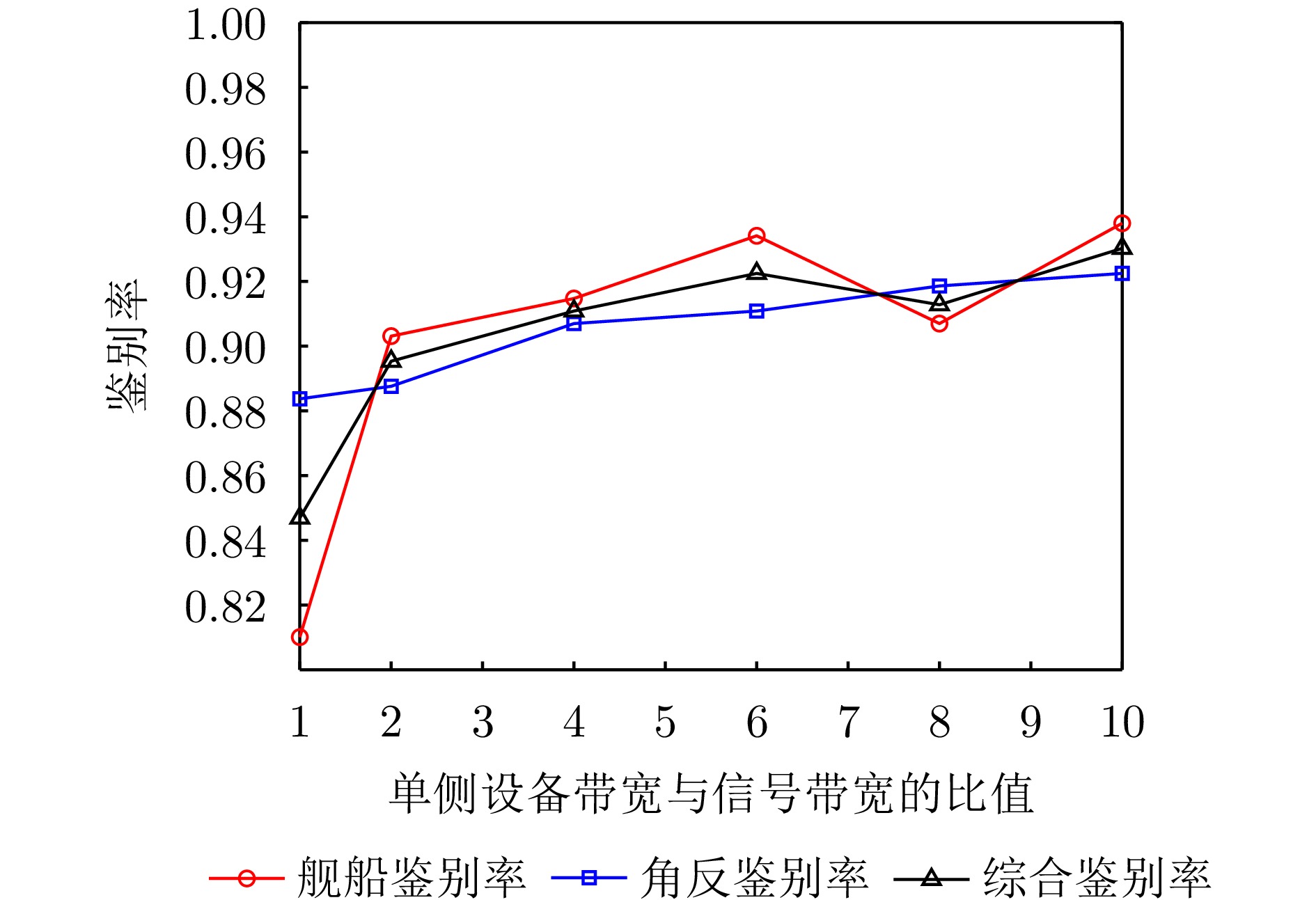
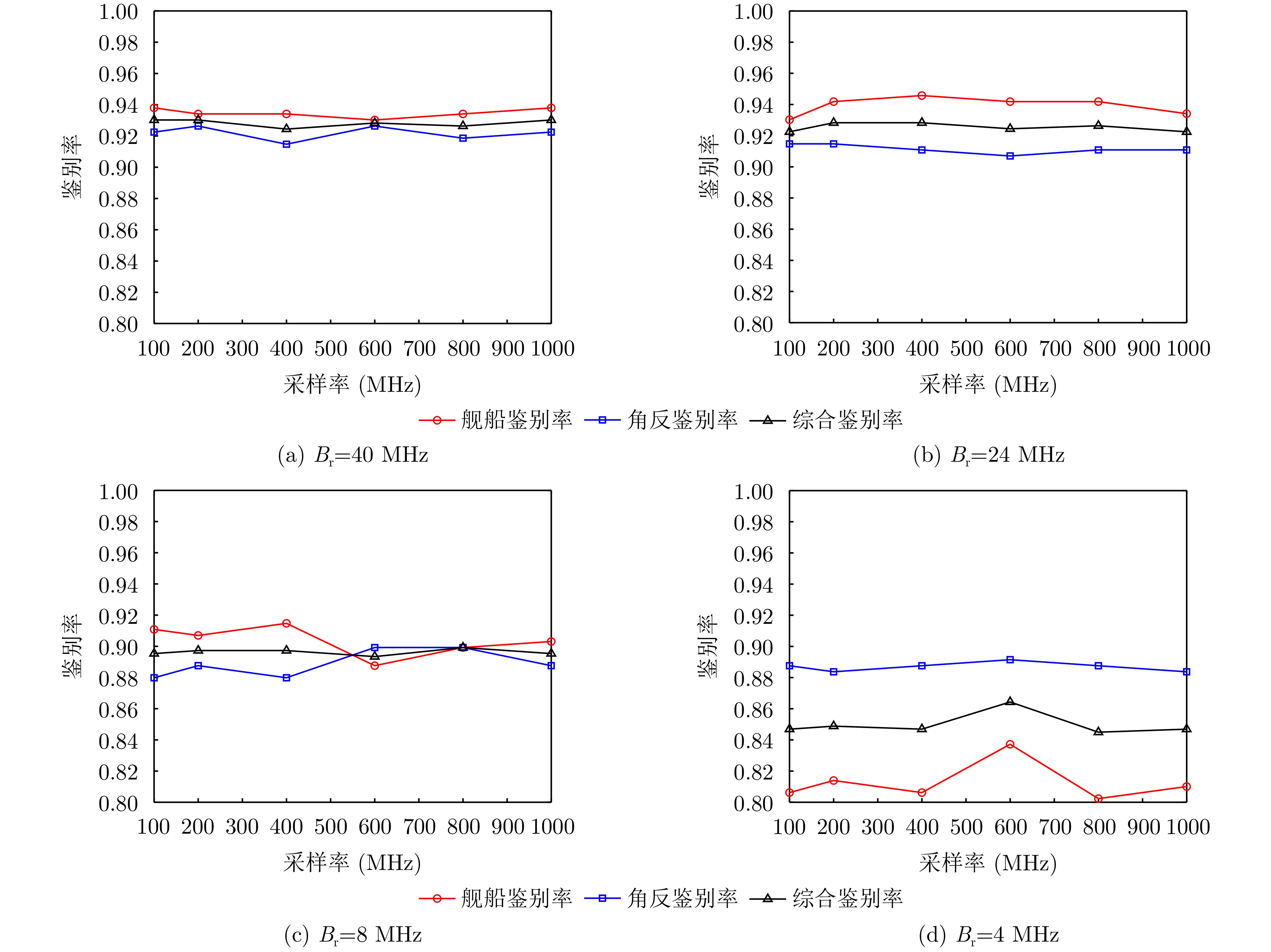
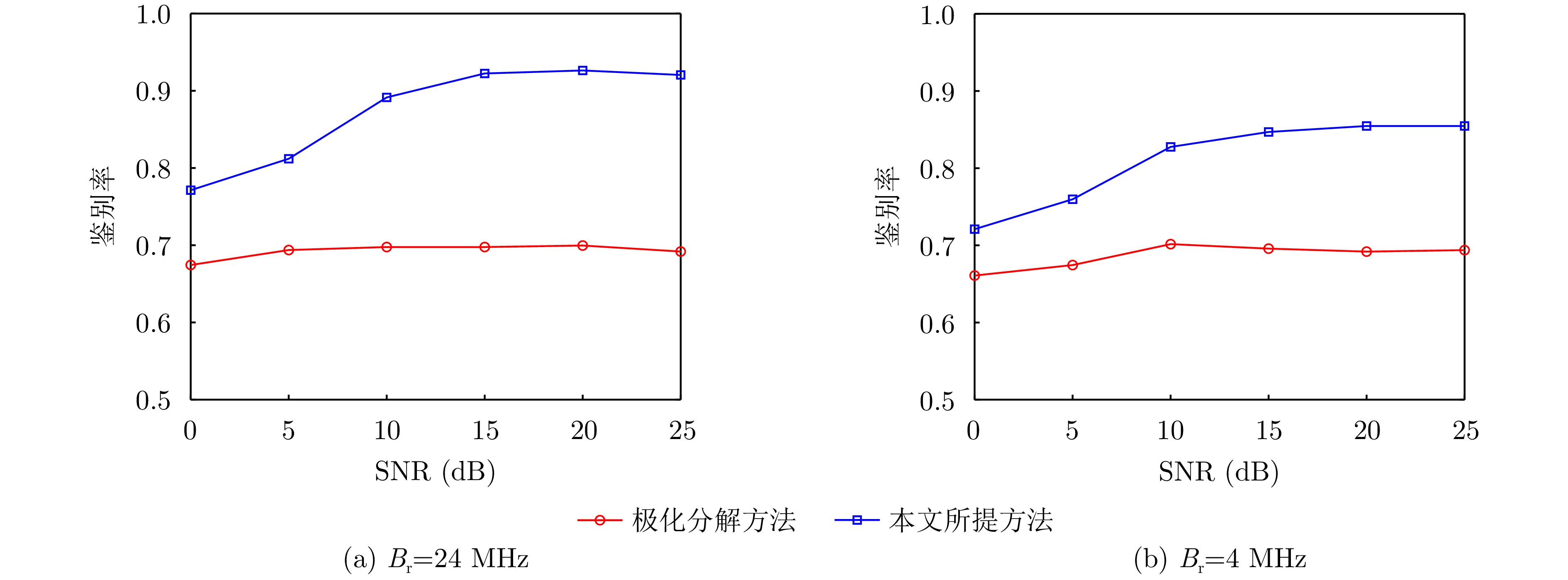
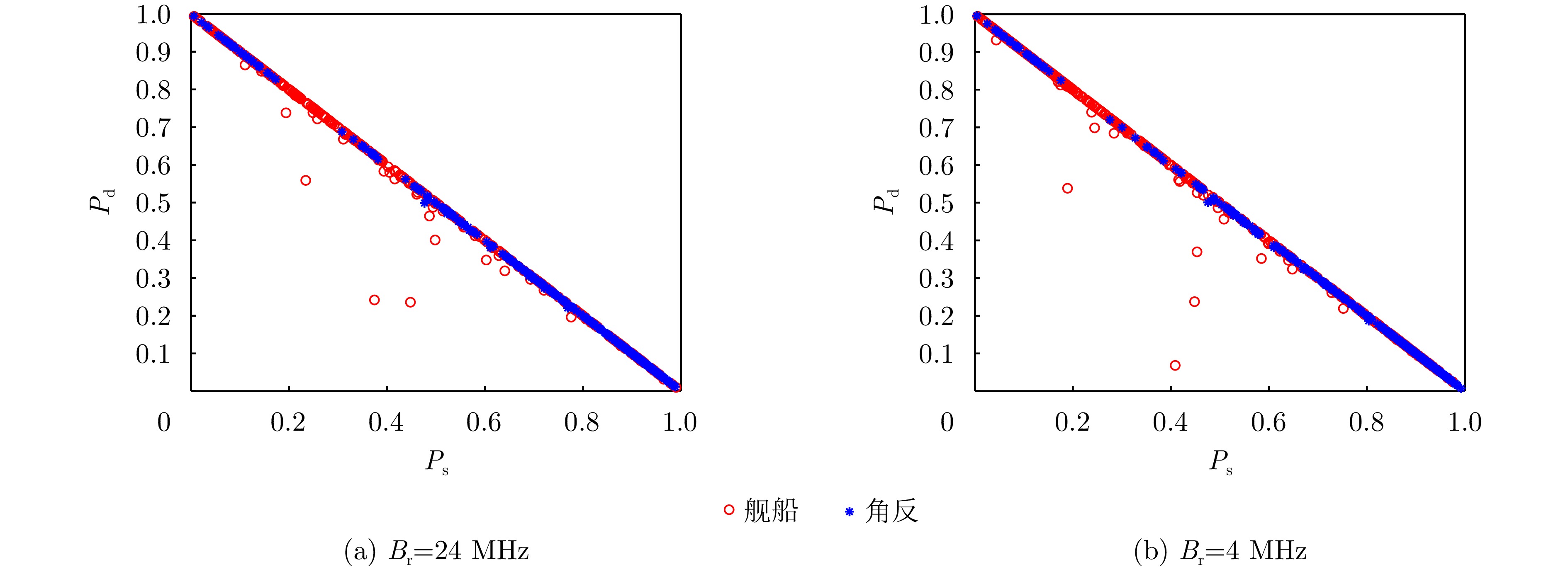
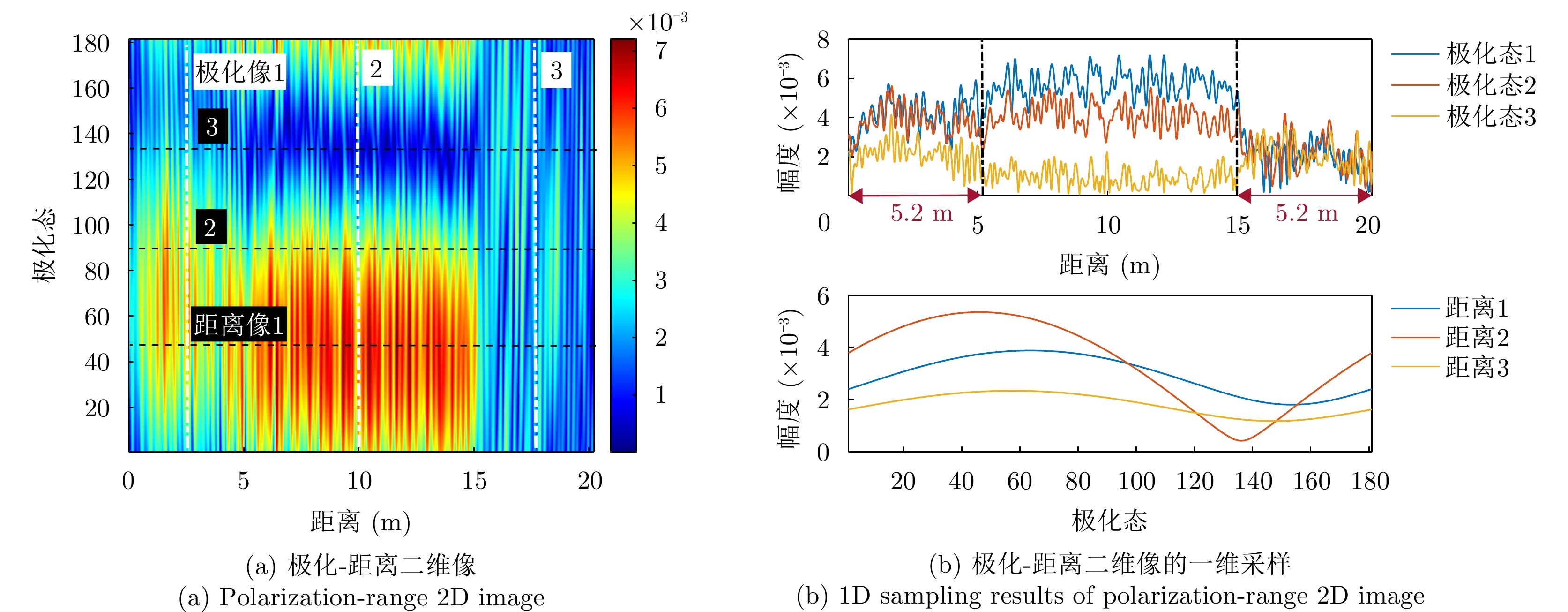
Distinguishing between ships and corner reflectors is challenging in radar observations of the sea. Traditional identification methods, including high resolution range profiles, polarization decomposition, and polarization modulation, improve radial range resolution to the target by transmitting signals with a large bandwidth. The latter two methods use polarization to improve target identification. Single-carrier pulse signals, often used in civil marine radars owing to their low hardware cost, pose challenges in identifying ships and corner reflectors owing to their low range resolution and pulse compression gain. This article proposes a novel method for identifying ships and corner reflectors using polarization modulation in civil marine radars. This approach aims to fully exploit the target identification potential of the narrowband signal joint polarization modulation technology. Through constructing the polarization-range 2D images, the method differentiates between ships and corner reflectors through their unique polarization scattering characteristics. The process involves calculating the average Pearson correlation coefficient between each polarization image and the range image, which serves as the correlation feature parameter. A support vector machine is then employed to achieve accurate target identification. Electromagnetic simulations show that by increasing the device bandwidth to 2~6 times the original signal bandwidth (2 MHz), civil marine radar can achieve a comprehensive identification rate of 90.18%~92.31% at a Signal to Noise Ratio (SNR) of 15 dB and a sampling rate of 100 MHz. The study also explores the influence of missing 50% of pitch angle and azimuth angle data in the training set, finding that identification rates in all four cases exceed 85% when the SNR is above 15 dB. Comparisons with the polarization decomposition method under the same narrowband observation conditions show that when the SNR is 15 dB or higher and the device bandwidth is increased sixfold, the average identification rate of the proposed method improves by 22.67%. This strongly supports the effectiveness of the proposed method. In addition, two cases with different polarization scattering characteristics are constructed in the anechoic chamber using dihedral and trihedral setups. Five sets of measured data show that when the SNR of the echo is 8~12 dB, the experiments demonstrate strong intra-class aggregation and clear inter-class separability. These results effectively support the electromagnetic simulation findings.
Distinguishing between ships and corner reflectors is challenging in radar observations of the sea. Traditional identification methods, including high resolution range profiles, polarization decomposition, and polarization modulation, improve radial range resolution to the target by transmitting signals with a large bandwidth. The latter two methods use polarization to improve target identification. Single-carrier pulse signals, often used in civil marine radars owing to their low hardware cost, pose challenges in identifying ships and corner reflectors owing to their low range resolution and pulse compression gain. This article proposes a novel method for identifying ships and corner reflectors using polarization modulation in civil marine radars. This approach aims to fully exploit the target identification potential of the narrowband signal joint polarization modulation technology. Through constructing the polarization-range 2D images, the method differentiates between ships and corner reflectors through their unique polarization scattering characteristics. The process involves calculating the average Pearson correlation coefficient between each polarization image and the range image, which serves as the correlation feature parameter. A support vector machine is then employed to achieve accurate target identification. Electromagnetic simulations show that by increasing the device bandwidth to 2~6 times the original signal bandwidth (2 MHz), civil marine radar can achieve a comprehensive identification rate of 90.18%~92.31% at a Signal to Noise Ratio (SNR) of 15 dB and a sampling rate of 100 MHz. The study also explores the influence of missing 50% of pitch angle and azimuth angle data in the training set, finding that identification rates in all four cases exceed 85% when the SNR is above 15 dB. Comparisons with the polarization decomposition method under the same narrowband observation conditions show that when the SNR is 15 dB or higher and the device bandwidth is increased sixfold, the average identification rate of the proposed method improves by 22.67%. This strongly supports the effectiveness of the proposed method. In addition, two cases with different polarization scattering characteristics are constructed in the anechoic chamber using dihedral and trihedral setups. Five sets of measured data show that when the SNR of the echo is 8~12 dB, the experiments demonstrate strong intra-class aggregation and clear inter-class separability. These results effectively support the electromagnetic simulation findings.












2024, 13(6): 1279-1297.
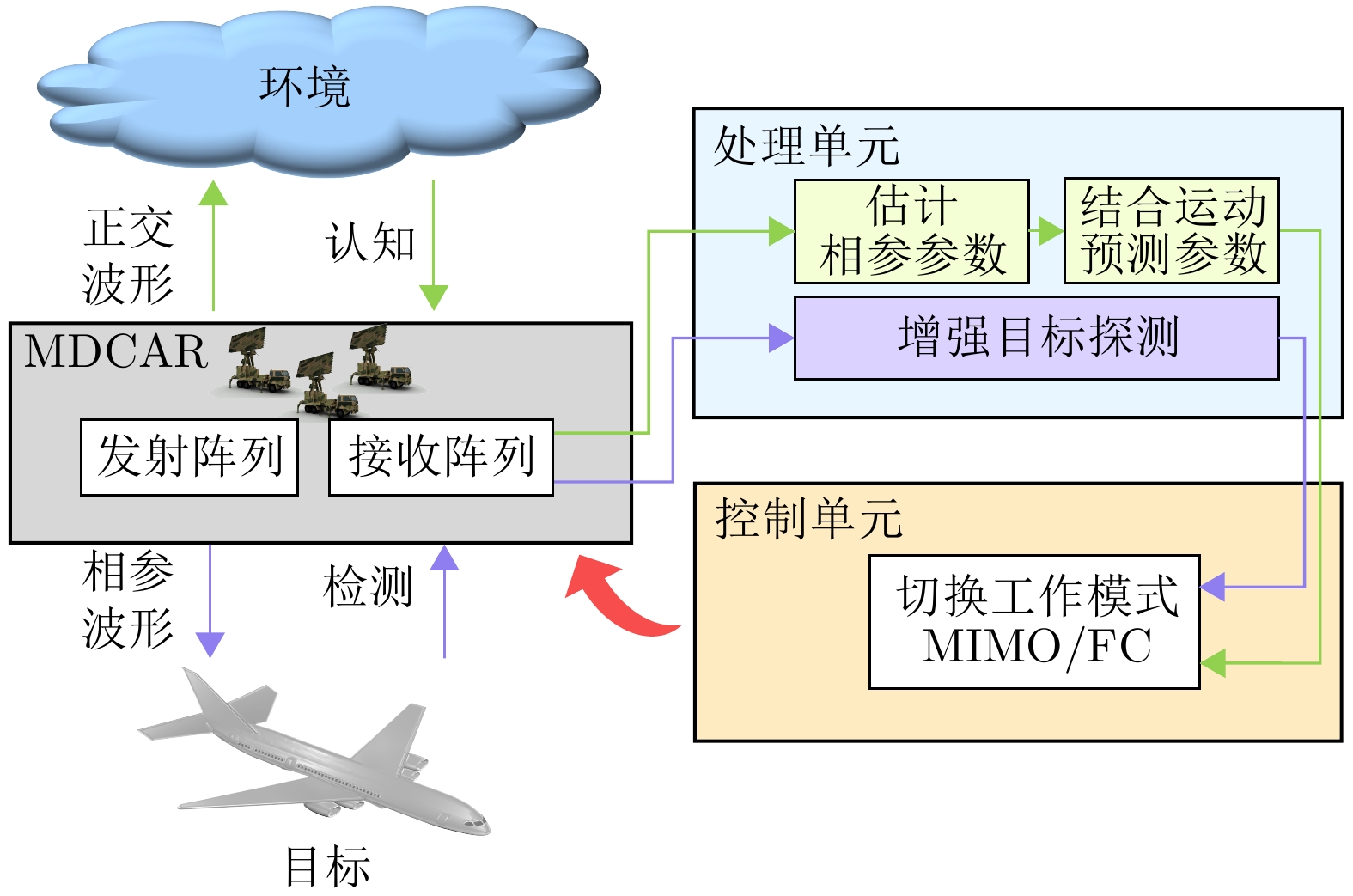
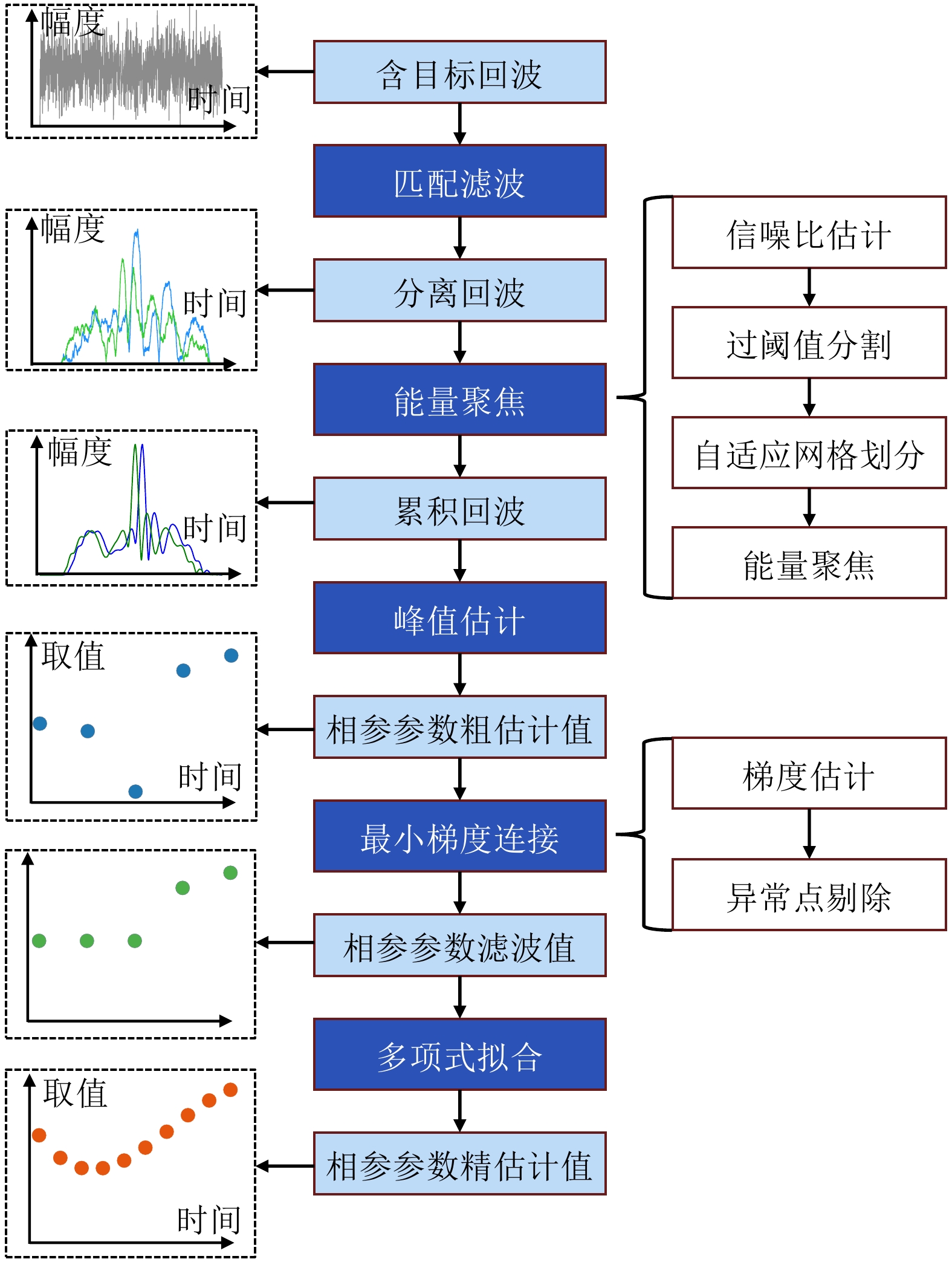
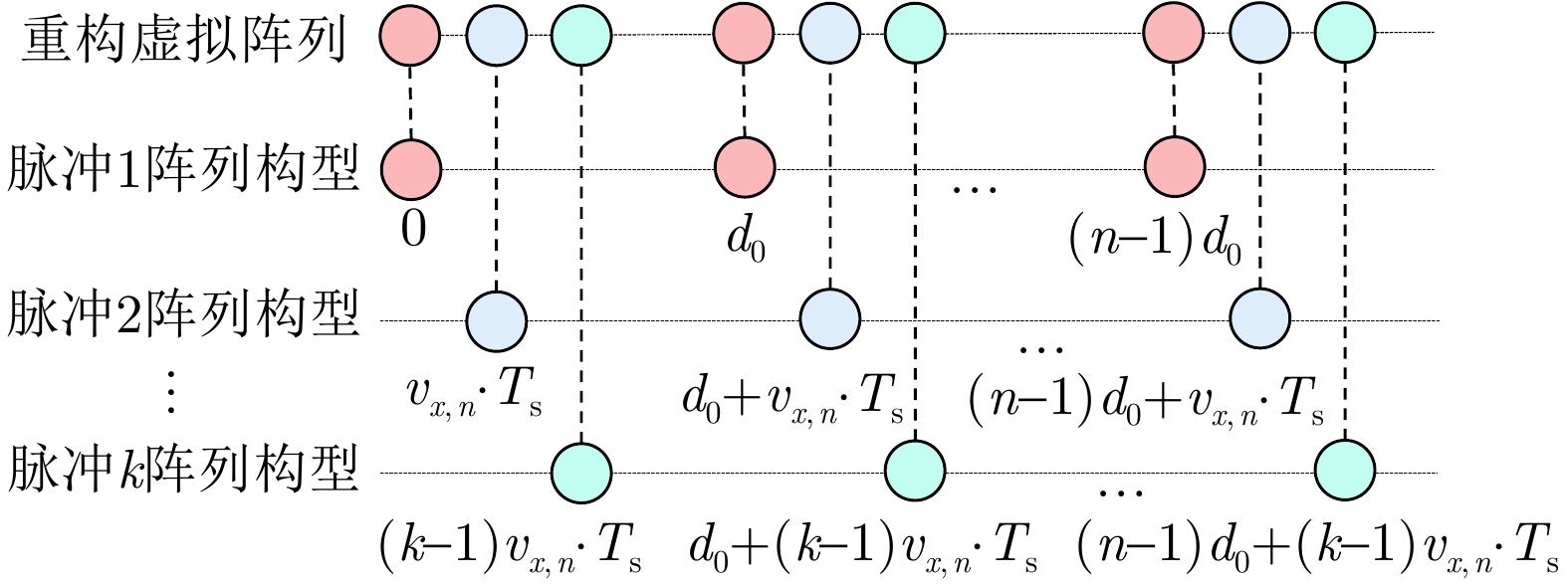
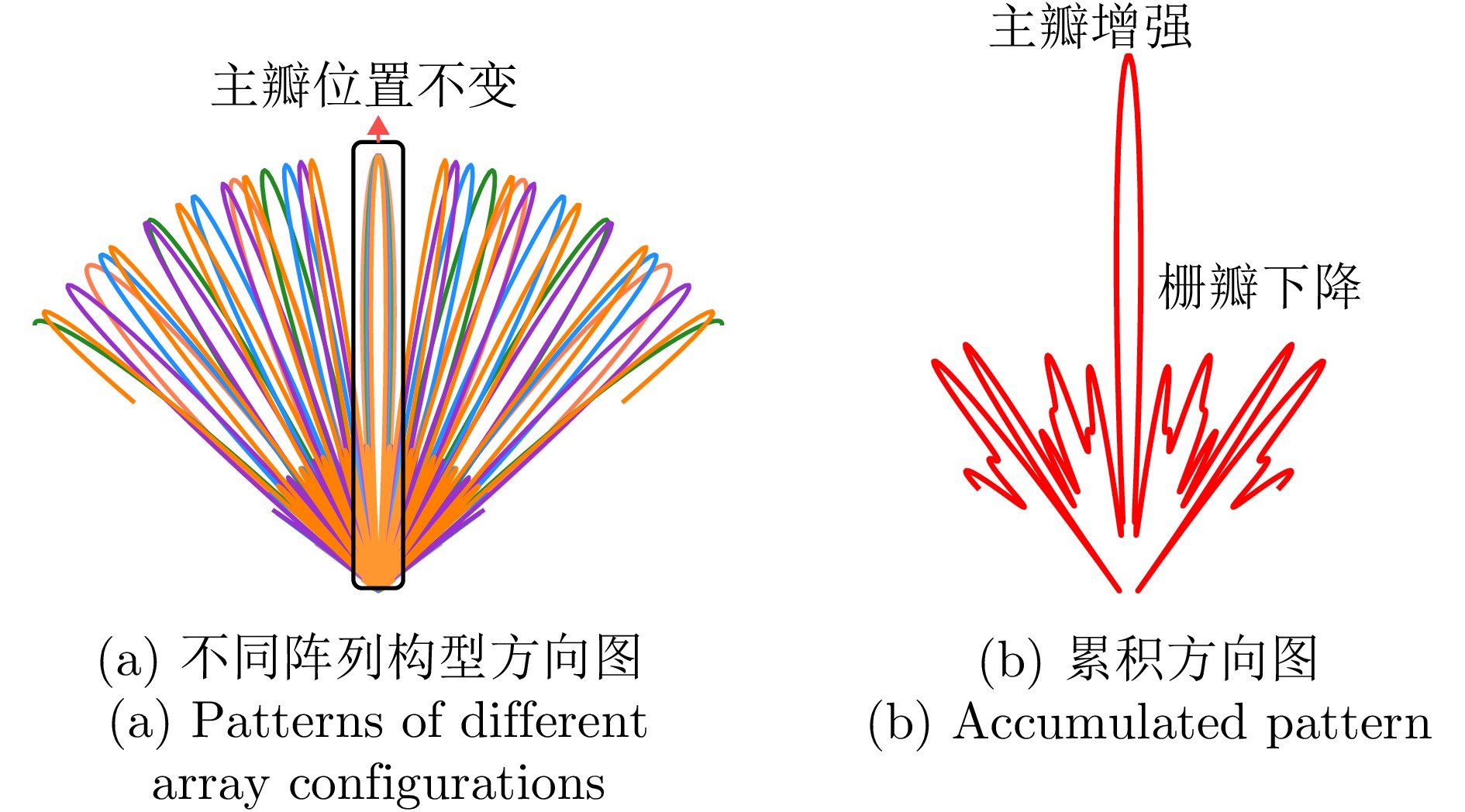
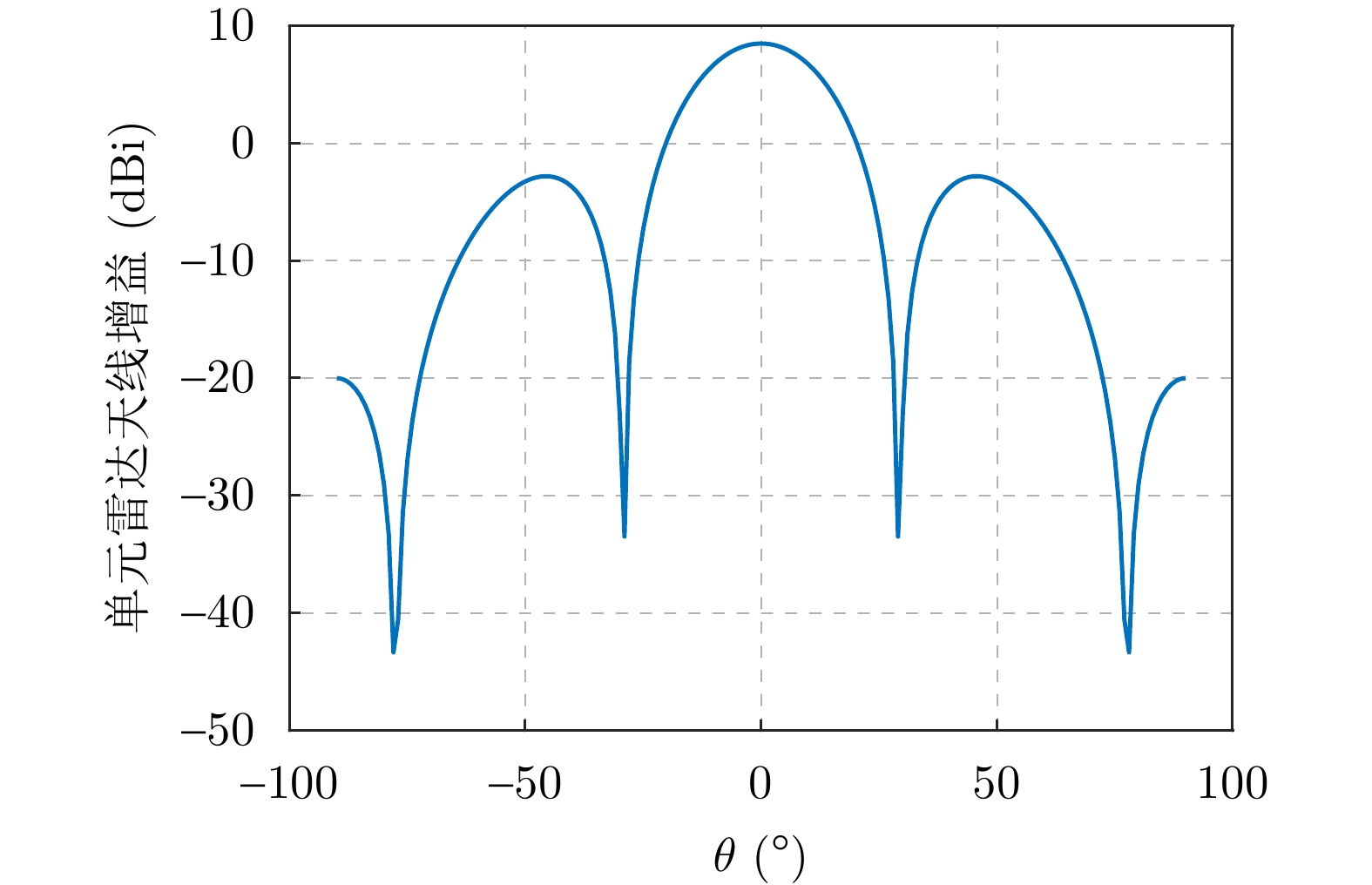
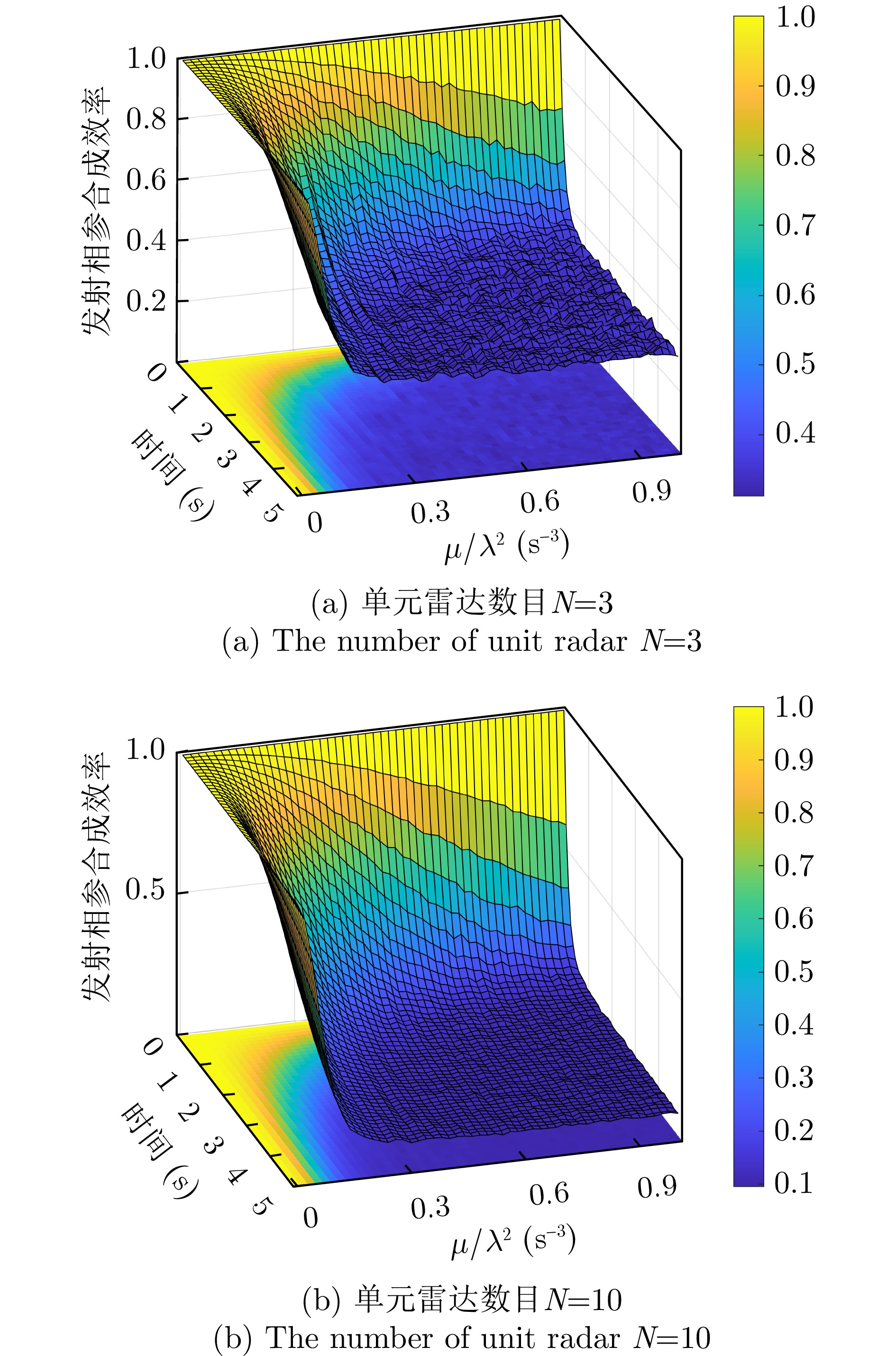
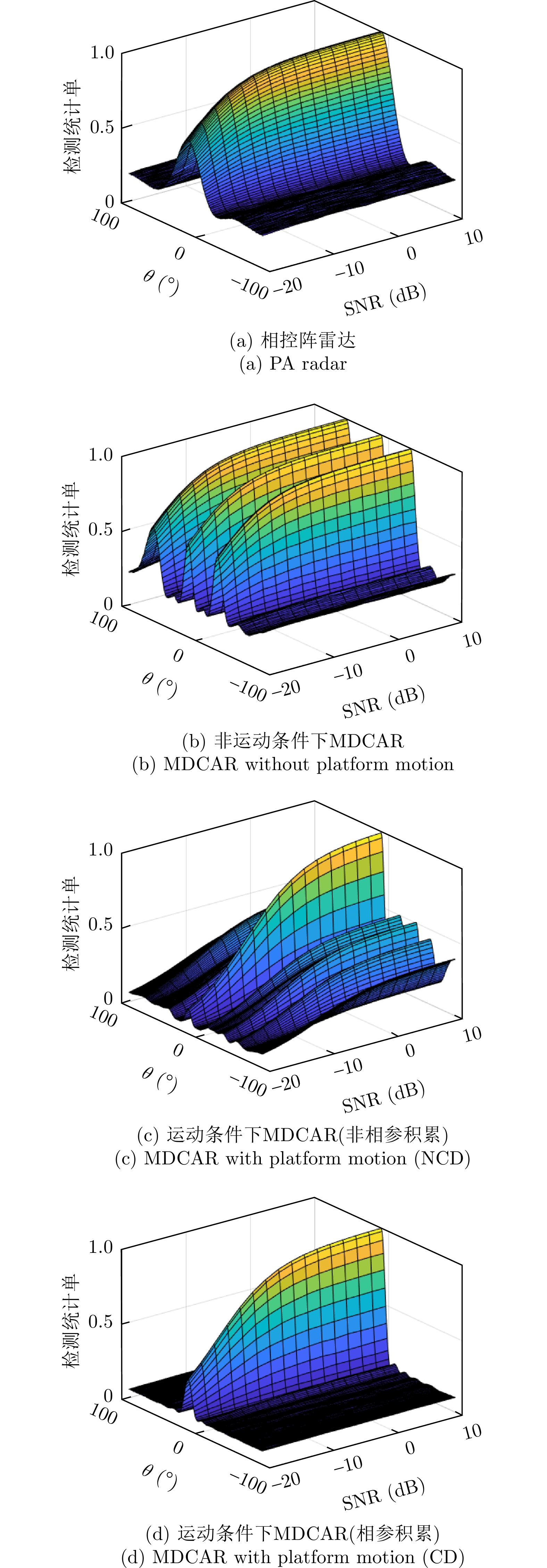
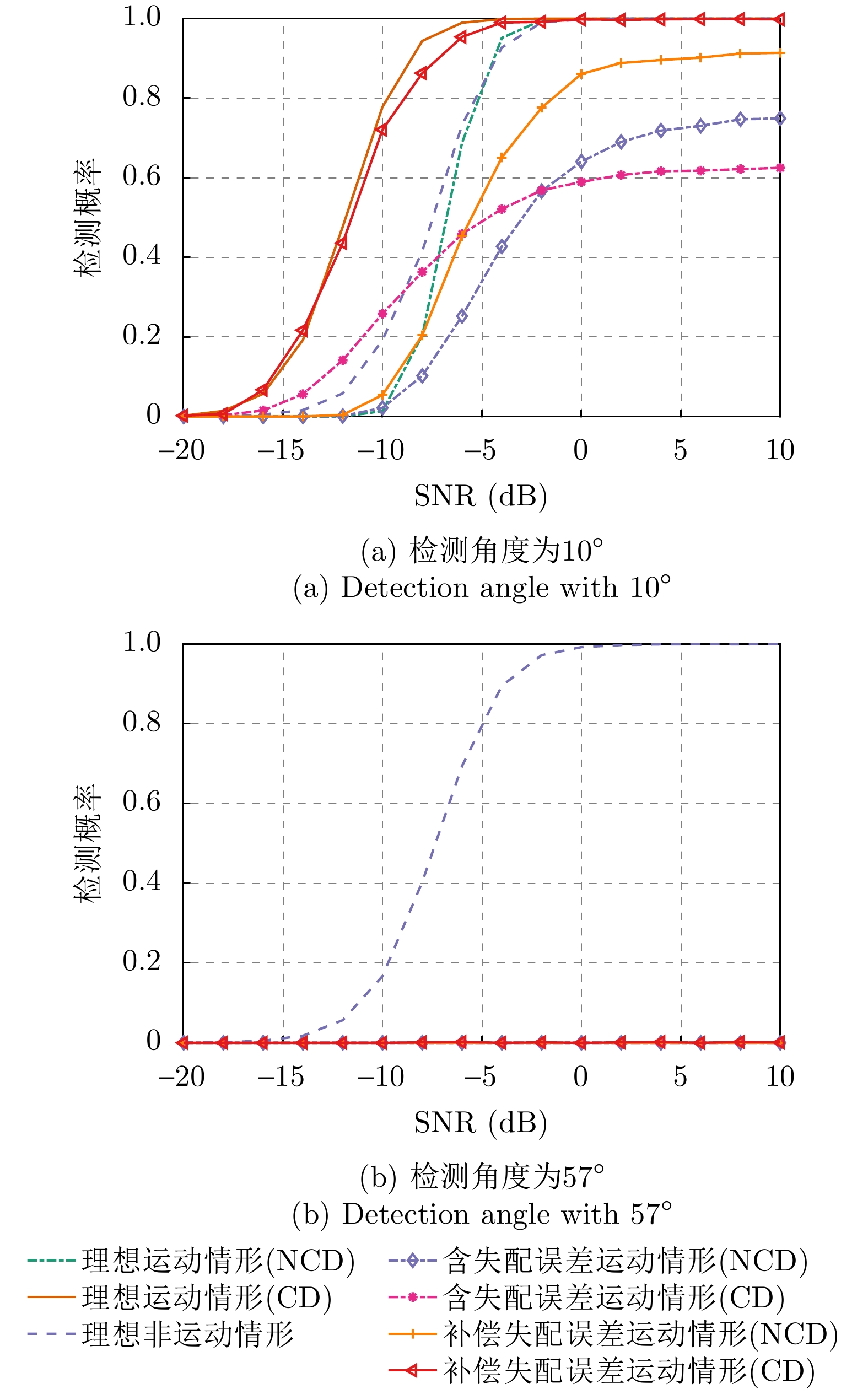
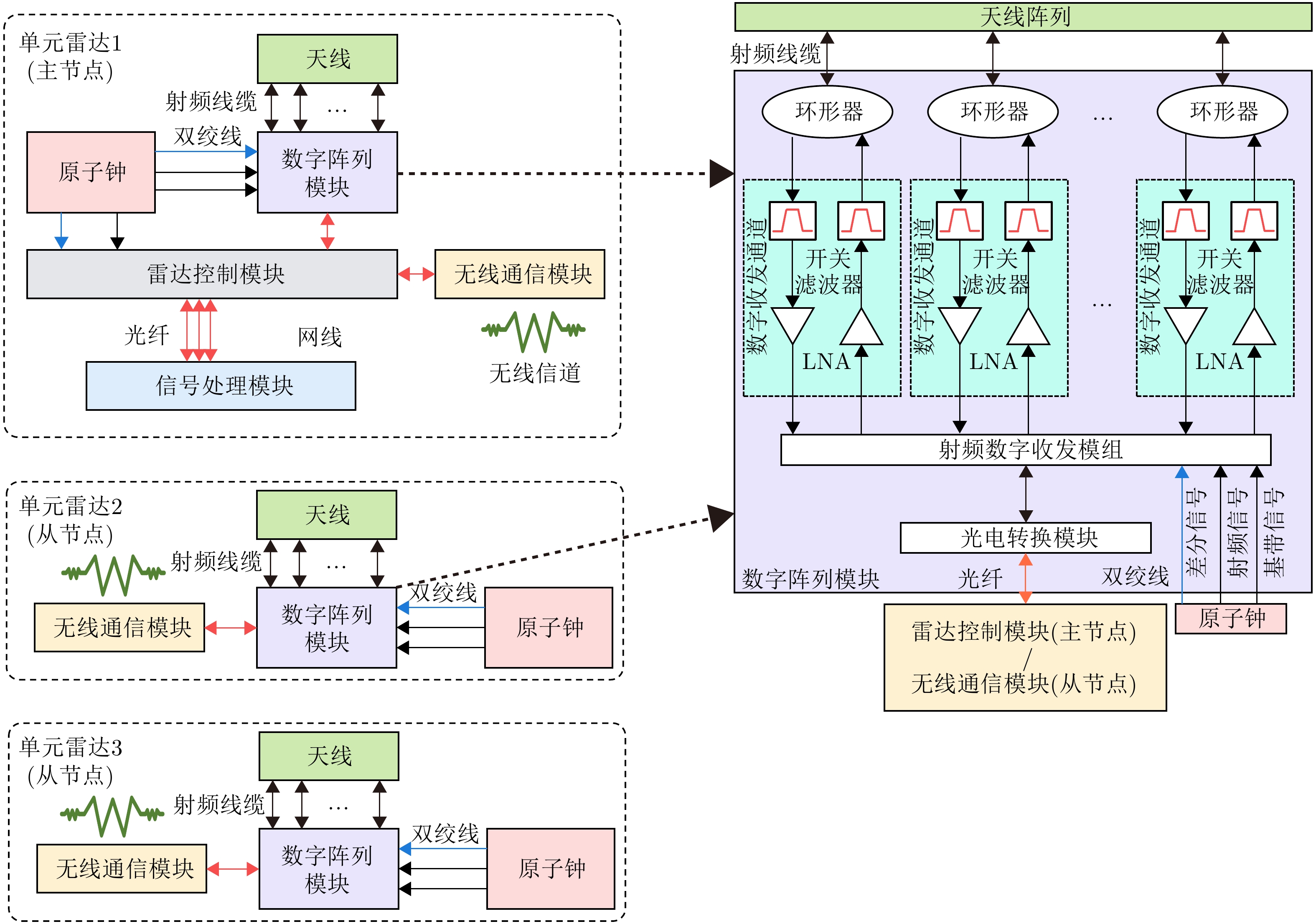
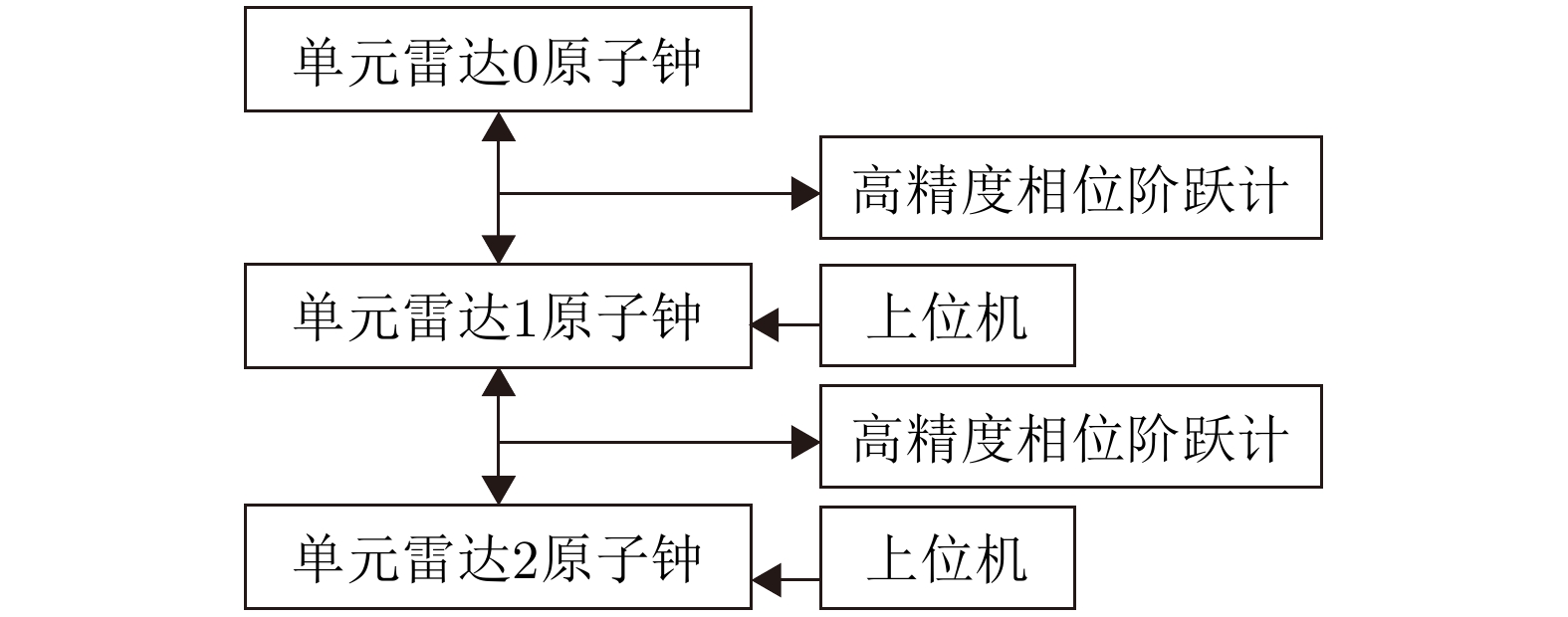
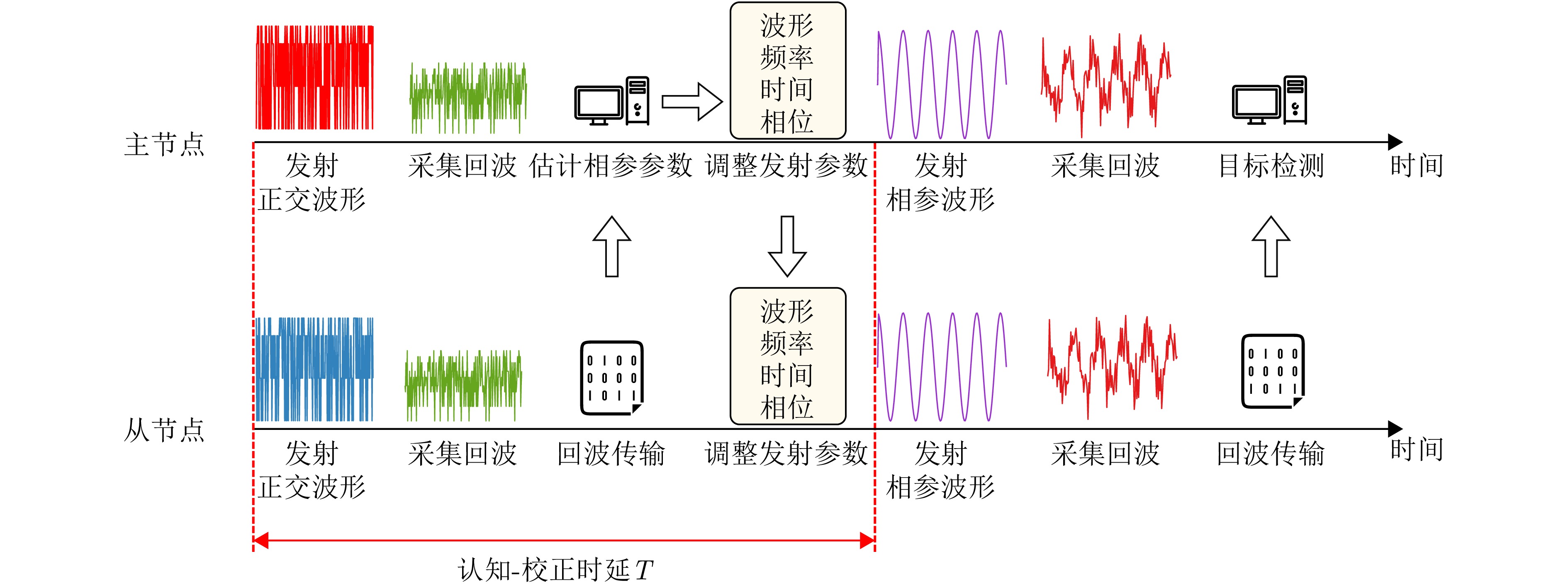
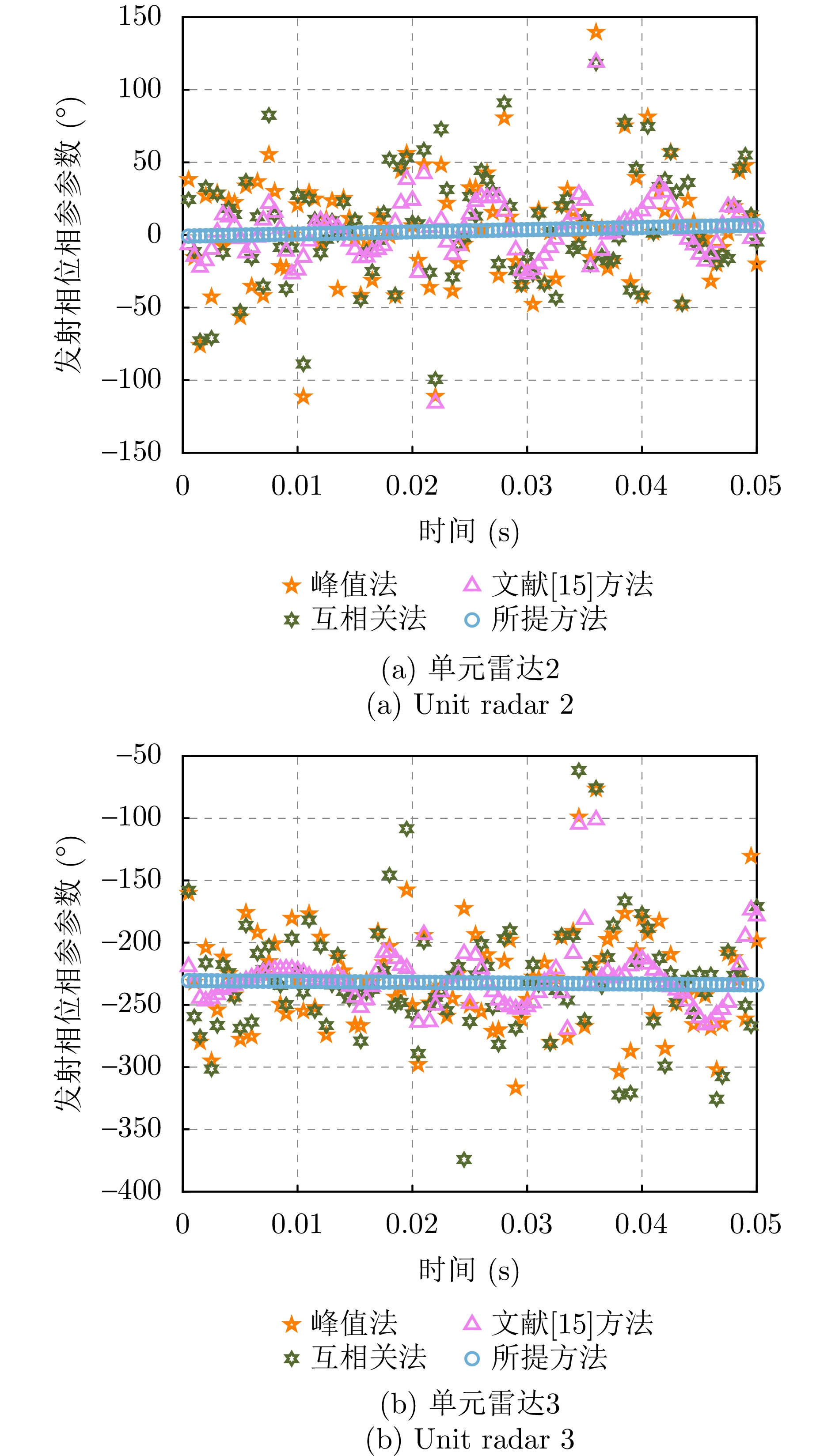
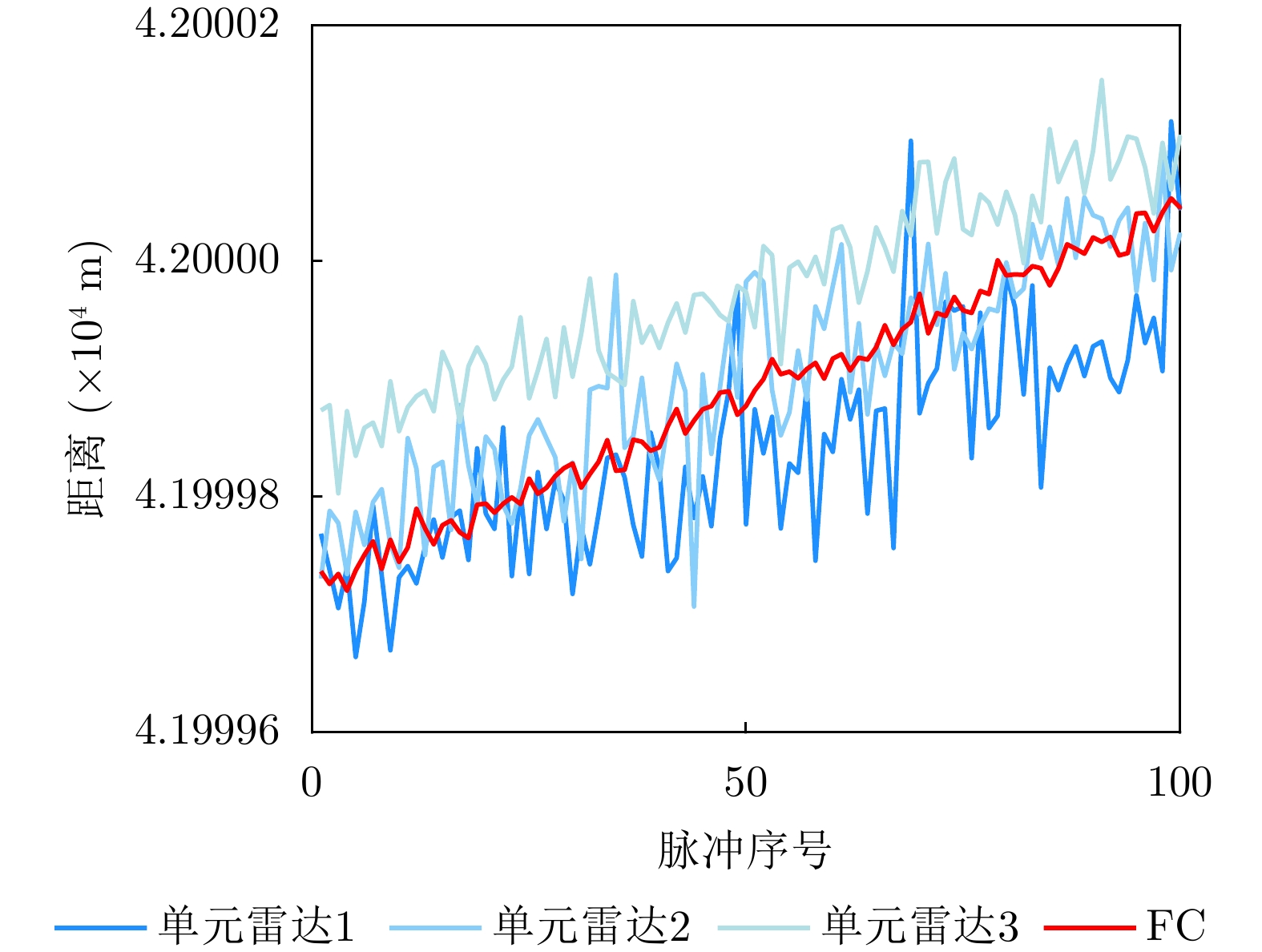
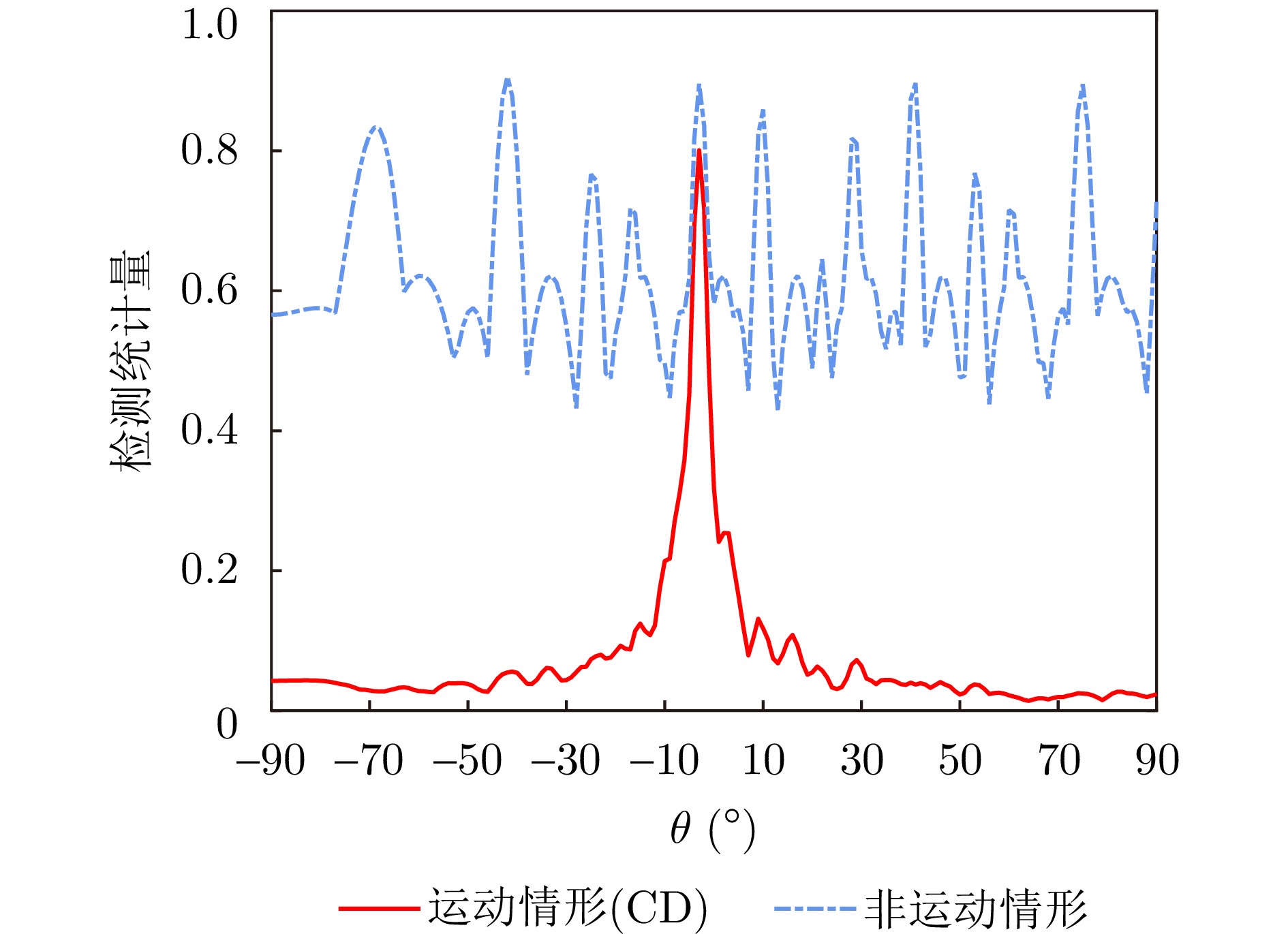
As one of the most promising next-generation radars, Moving platform based Distributed Aperture Radar (MDAR) cannot only coherently combining distributed apertures to obtain the same detection performance of a large aperture, but also enhance the detection and anti-damage capabilities through mobility and flexible deployment. However, time and phase synchronization among radars should be done before coherently combining due to internal clock differences and external propagation path differences. Moreover, grating lobes will generate as the distance between multiple radars usually exceeds half a wavelength, which affects the estimation accuracy of target angle. To obtain Coherent Parameters (CPs), this paper established a cognitive framework for MDAR based on closed-loop structure. And a multi-pulse correlation CPs estimation method considering motion conditions is proposed to improve estimation accuracy. In the meanwhile, an unambiguous angle estimation method based on array configuration accumulation is proposed considering platform motion characteristics. Finally, based on the simulation verification and the proposed framework, a prototype of a 3-node ground Moving platform based Distributed Coherent Aperture Radar (MDCAR) system is designed and experiments are conducted. Compared to a single radar, a maximum value of 14.2 dB signal-to-noise ratio improvement can be achieved, which can further enhance range detection accuracy. Besides, unambiguous angle estimation is also realized under certain conditions. This work is expected to provide support for the research and development of MDCAR.
As one of the most promising next-generation radars, Moving platform based Distributed Aperture Radar (MDAR) cannot only coherently combining distributed apertures to obtain the same detection performance of a large aperture, but also enhance the detection and anti-damage capabilities through mobility and flexible deployment. However, time and phase synchronization among radars should be done before coherently combining due to internal clock differences and external propagation path differences. Moreover, grating lobes will generate as the distance between multiple radars usually exceeds half a wavelength, which affects the estimation accuracy of target angle. To obtain Coherent Parameters (CPs), this paper established a cognitive framework for MDAR based on closed-loop structure. And a multi-pulse correlation CPs estimation method considering motion conditions is proposed to improve estimation accuracy. In the meanwhile, an unambiguous angle estimation method based on array configuration accumulation is proposed considering platform motion characteristics. Finally, based on the simulation verification and the proposed framework, a prototype of a 3-node ground Moving platform based Distributed Coherent Aperture Radar (MDCAR) system is designed and experiments are conducted. Compared to a single radar, a maximum value of 14.2 dB signal-to-noise ratio improvement can be achieved, which can further enhance range detection accuracy. Besides, unambiguous angle estimation is also realized under certain conditions. This work is expected to provide support for the research and development of MDCAR.








2024, 13(6): 1298-1326.
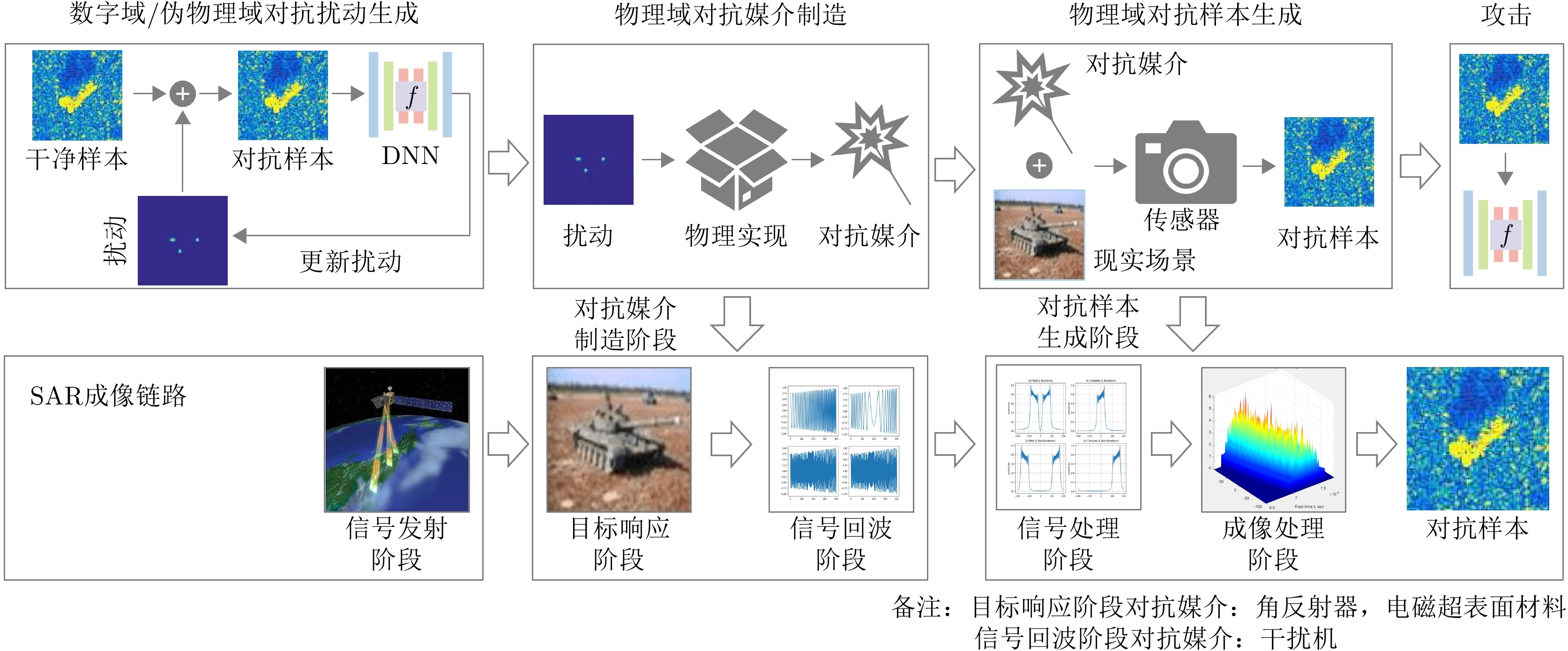
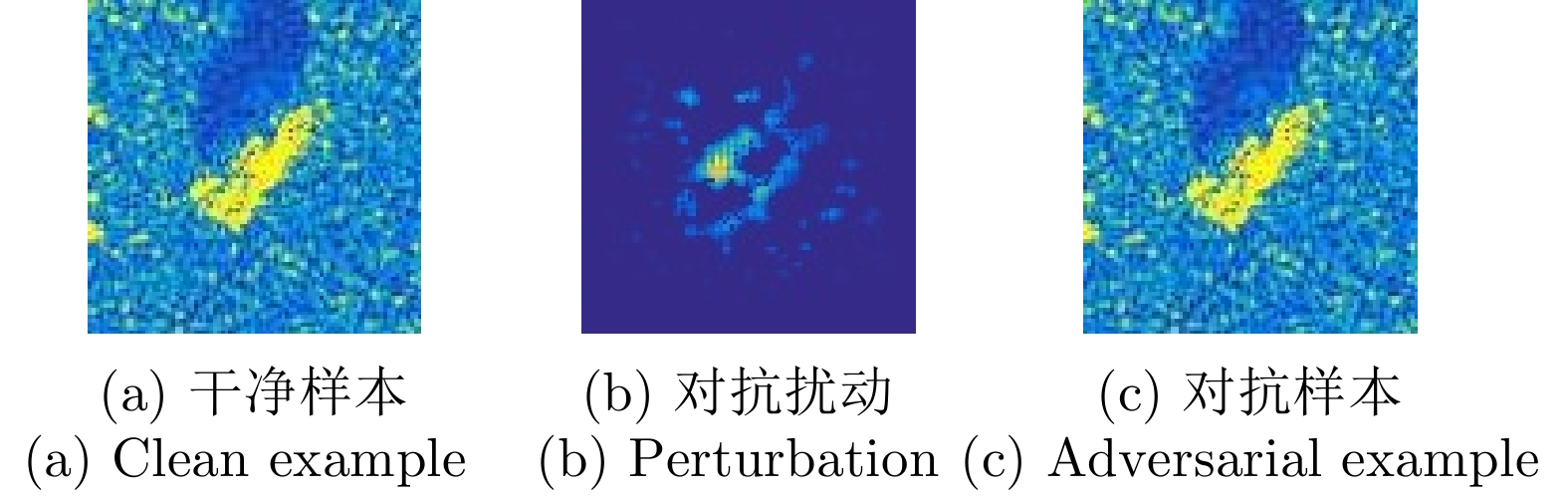
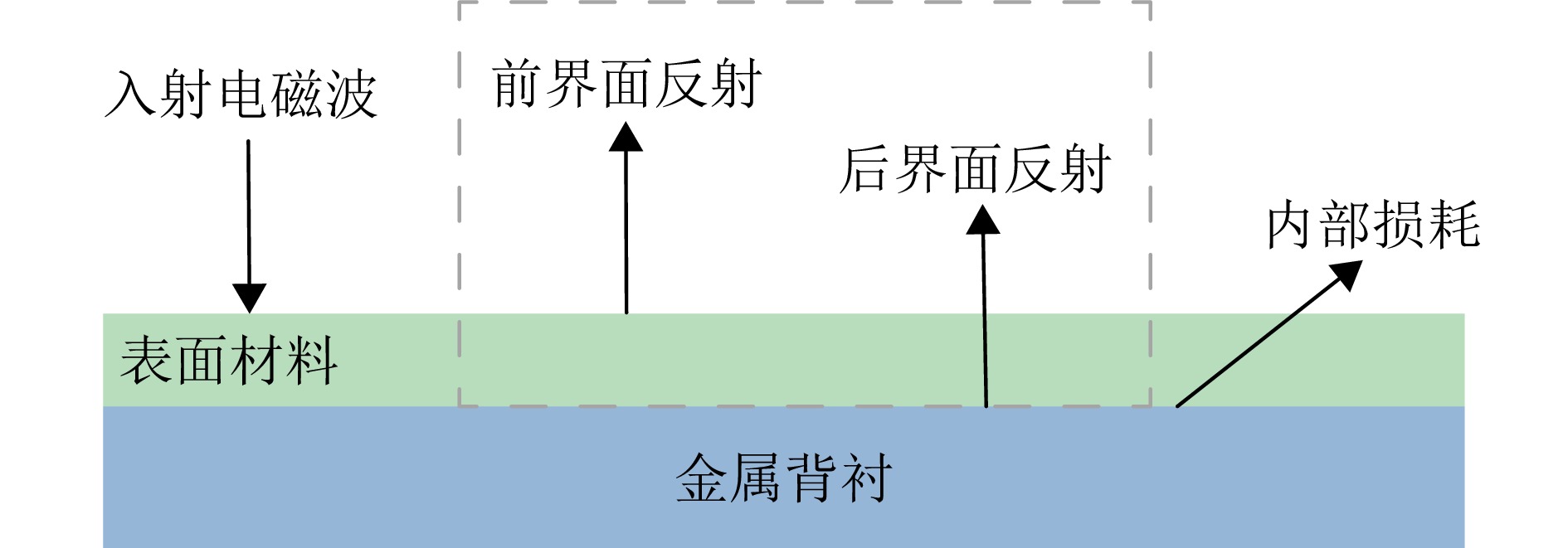
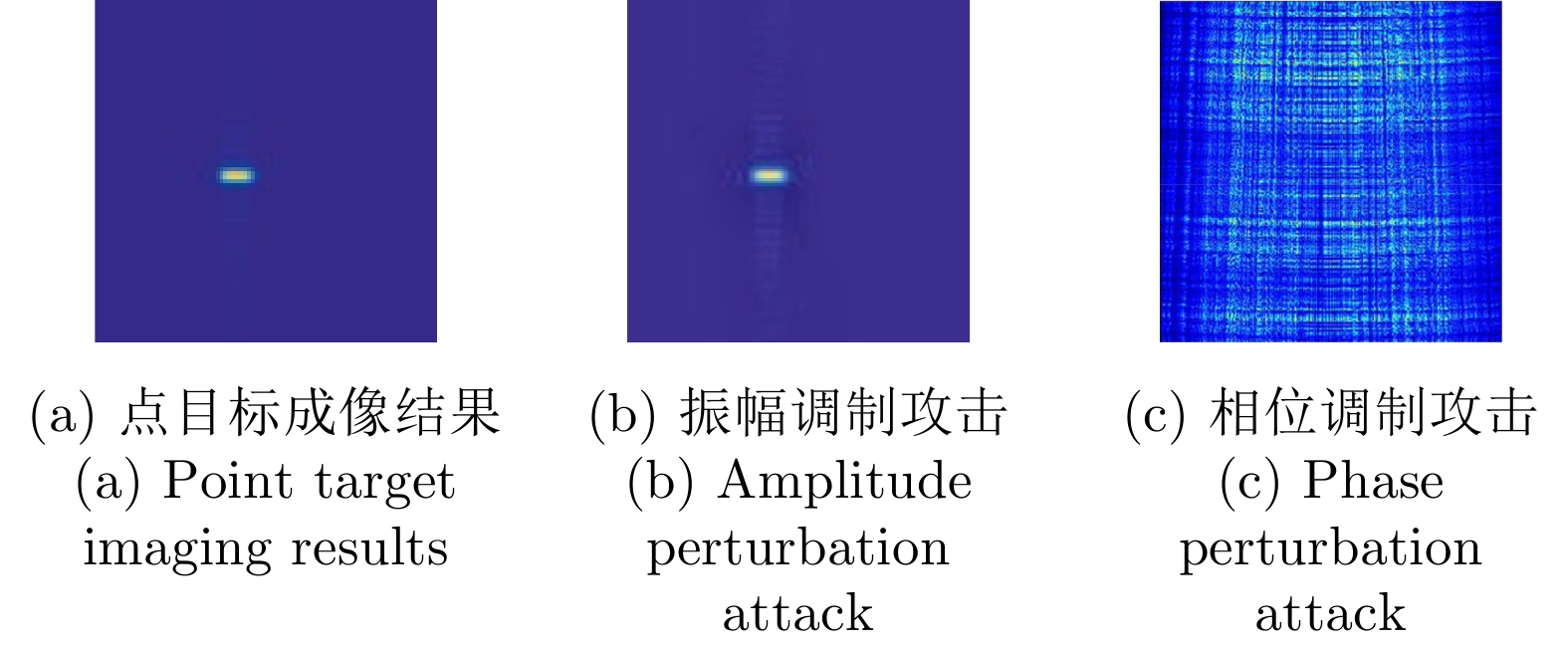
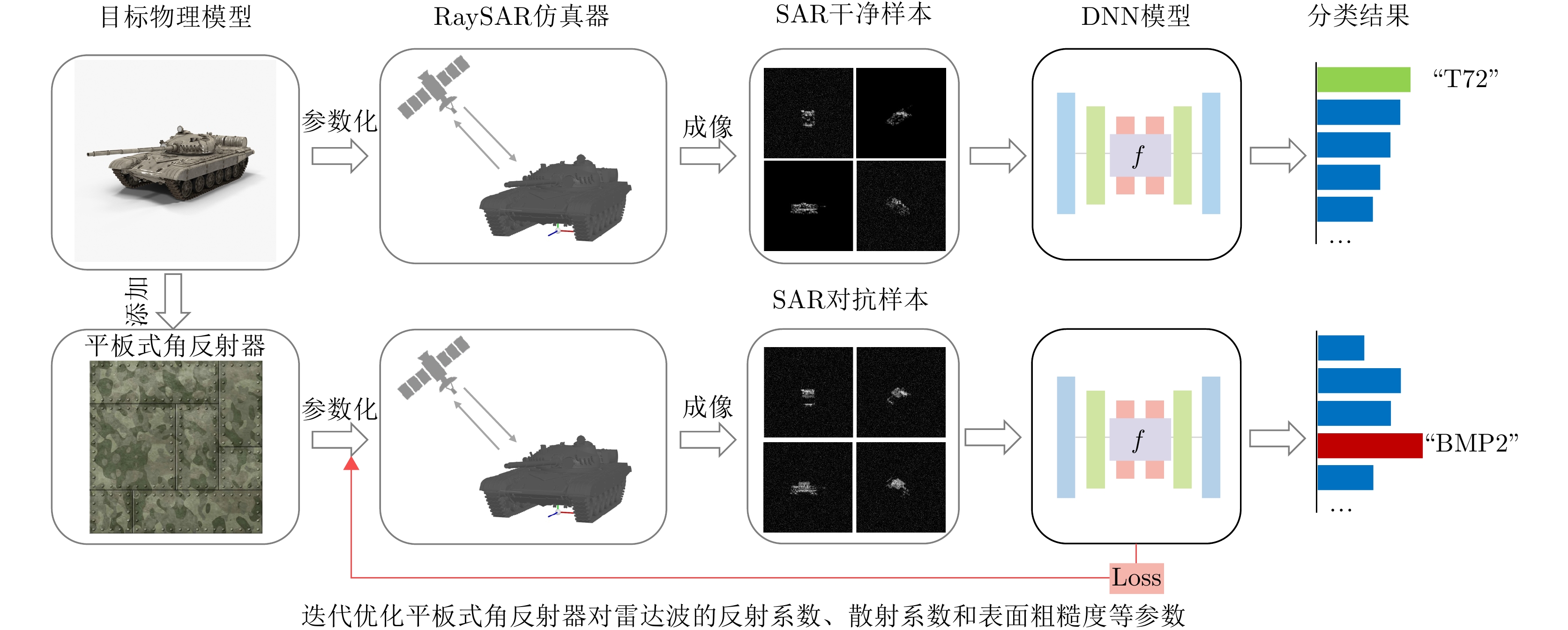
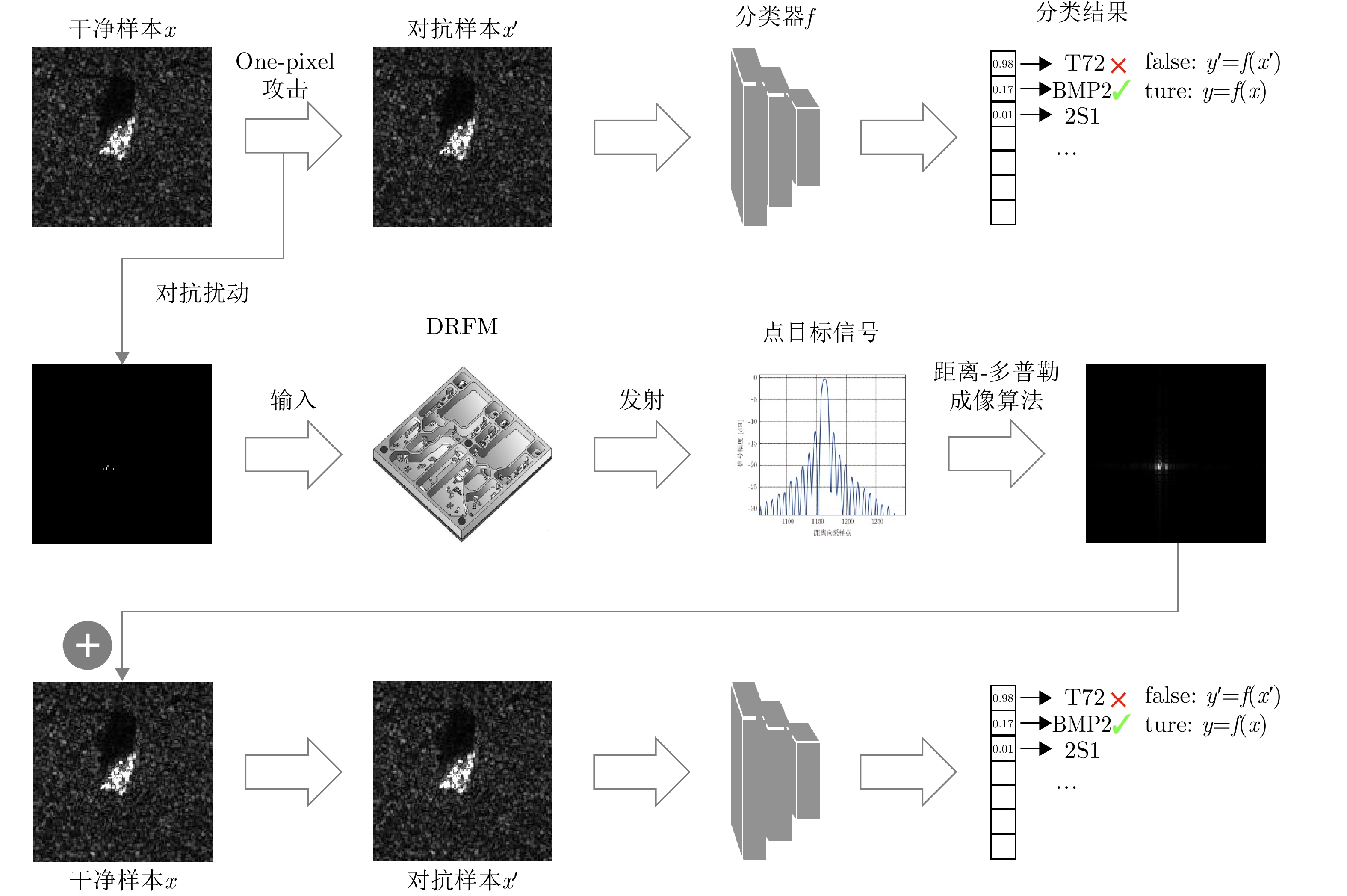
Deep Neural Network (DNN)-based Synthetic Aperture Radar (SAR) image target recognition has become a prominent area of interest in SAR applications. However, deep neural network models are vulnerable to adversarial example attacks. Adversarial examples are input samples that introduce minute perturbations within the dataset, causing the model to make highly confident yet incorrect judgments. Existing generation techniques of SAR adversarial examples fundamentally operate on two-dimensional images, which are classified as digital-domain adversarial examples. Although recent research has started to incorporate SAR imaging scattering mechanisms in adversarial example generation, two important flaws still remain: (1) imaging scattering mechanisms are only applied to SAR images without being integrated into the actual SAR imaging process, and (2) the mechanisms achieve only pseudo-physical-domain adversarial attacks, failing to realize true three-dimensional physical-domain adversarial attacks. This study investigates the current state and development trends in adversarial attacks on SAR intelligent target recognition. First, the development trajectory of traditional generation technologies of SAR-image adversarial examples is meticulously traced and a comparative analysis of various technologies is conducted, thus summarizing their deficiencies. Building on the principles and actual processes of SAR imaging, physical-domain adversarial attack techniques are then proposed. These techniques manipulate the target object’s backscattering properties or emit finely adjustable interference signals in amplitude and phase to counter SAR intelligent target recognition algorithms. The paper also envisions practical implementations of SAR adversarial attacks in the physical domain. Finally, this paper concludes by discussing the future directions of SAR intelligent adversarial attack technologies.
Deep Neural Network (DNN)-based Synthetic Aperture Radar (SAR) image target recognition has become a prominent area of interest in SAR applications. However, deep neural network models are vulnerable to adversarial example attacks. Adversarial examples are input samples that introduce minute perturbations within the dataset, causing the model to make highly confident yet incorrect judgments. Existing generation techniques of SAR adversarial examples fundamentally operate on two-dimensional images, which are classified as digital-domain adversarial examples. Although recent research has started to incorporate SAR imaging scattering mechanisms in adversarial example generation, two important flaws still remain: (1) imaging scattering mechanisms are only applied to SAR images without being integrated into the actual SAR imaging process, and (2) the mechanisms achieve only pseudo-physical-domain adversarial attacks, failing to realize true three-dimensional physical-domain adversarial attacks. This study investigates the current state and development trends in adversarial attacks on SAR intelligent target recognition. First, the development trajectory of traditional generation technologies of SAR-image adversarial examples is meticulously traced and a comparative analysis of various technologies is conducted, thus summarizing their deficiencies. Building on the principles and actual processes of SAR imaging, physical-domain adversarial attack techniques are then proposed. These techniques manipulate the target object’s backscattering properties or emit finely adjustable interference signals in amplitude and phase to counter SAR intelligent target recognition algorithms. The paper also envisions practical implementations of SAR adversarial attacks in the physical domain. Finally, this paper concludes by discussing the future directions of SAR intelligent adversarial attack technologies.




2024, 13(6): 1327-1336.
The performance of Synthetic Aperture Radar (SAR) active deception jamming detection based on the interferometric phase is analyzed. Based on the slant-range local fringe frequency probability distributions of a real scene and a false target, the influences of the vertical baseline length, jamming-to-signal ratio, and local fringe frequency estimation window size on the True Positive Rate (TPR) are analyzed. Furthermore, when the False Positive Rate (FPR) is known, the vertical baseline length required for the SAR system to meet the detection probability requirements is analyzed, thereby providing a theoretical basis for the baseline design of the SAR system. Finally, the result of theoretical analysis is verified by simulation. The theoretical analysis and experimental results show that, for a certain false alarm probability, as the vertical baseline length, jamming-to-signal ratio, or local fringe frequency estimation window value increases, the detection probability also increases.
The performance of Synthetic Aperture Radar (SAR) active deception jamming detection based on the interferometric phase is analyzed. Based on the slant-range local fringe frequency probability distributions of a real scene and a false target, the influences of the vertical baseline length, jamming-to-signal ratio, and local fringe frequency estimation window size on the True Positive Rate (TPR) are analyzed. Furthermore, when the False Positive Rate (FPR) is known, the vertical baseline length required for the SAR system to meet the detection probability requirements is analyzed, thereby providing a theoretical basis for the baseline design of the SAR system. Finally, the result of theoretical analysis is verified by simulation. The theoretical analysis and experimental results show that, for a certain false alarm probability, as the vertical baseline length, jamming-to-signal ratio, or local fringe frequency estimation window value increases, the detection probability also increases.




2024, 13(6): 1337-1354.
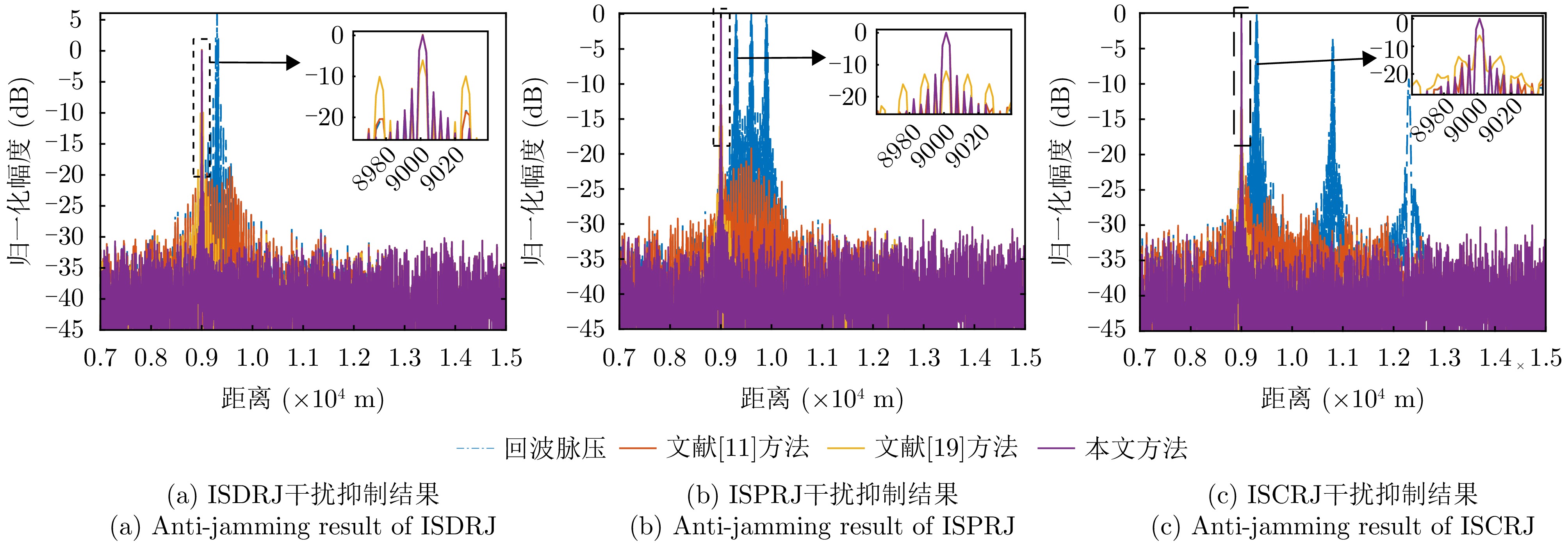
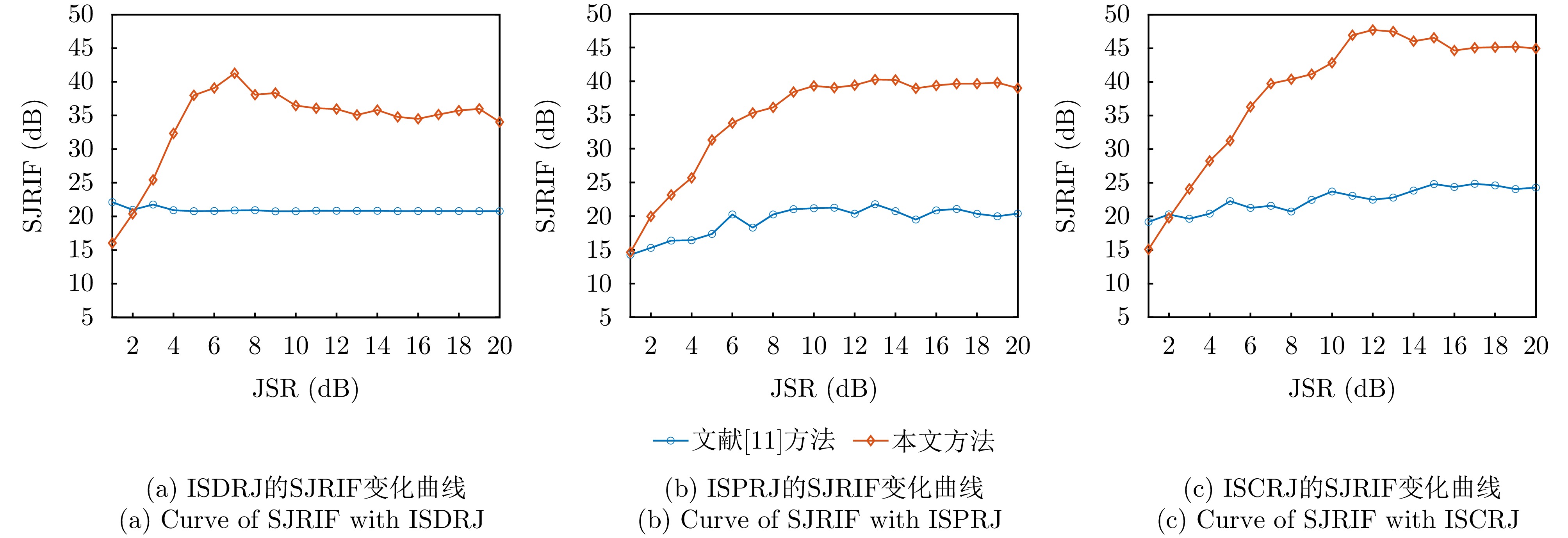
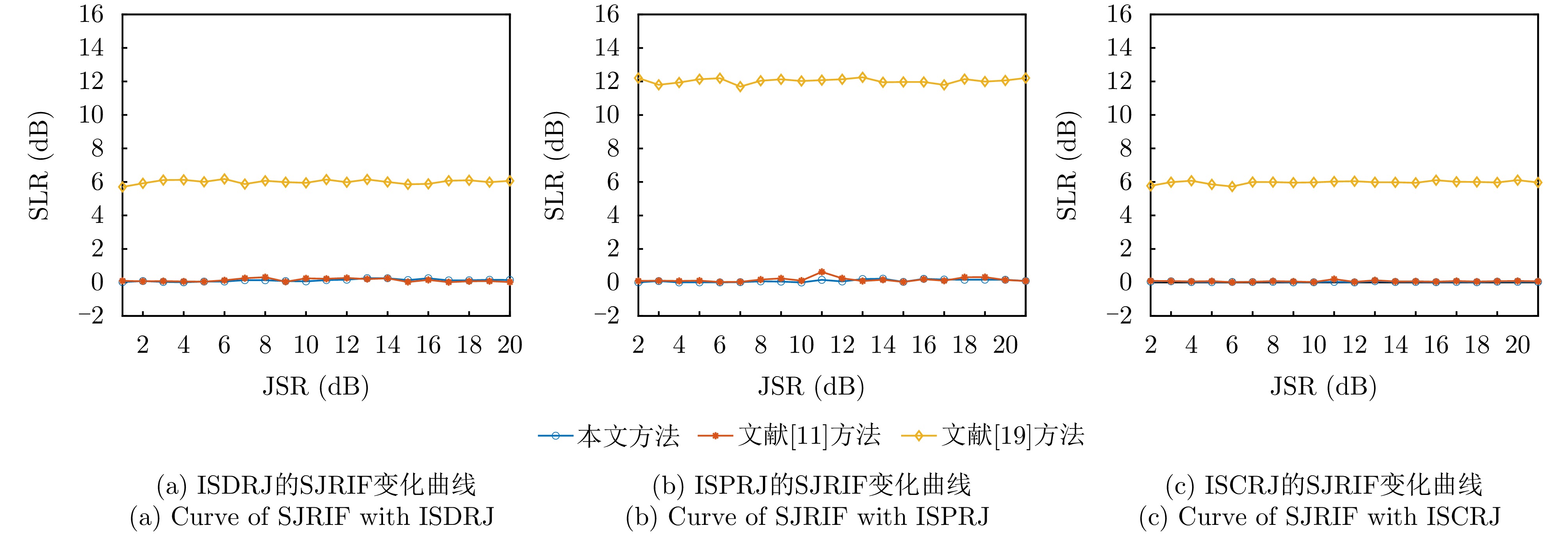
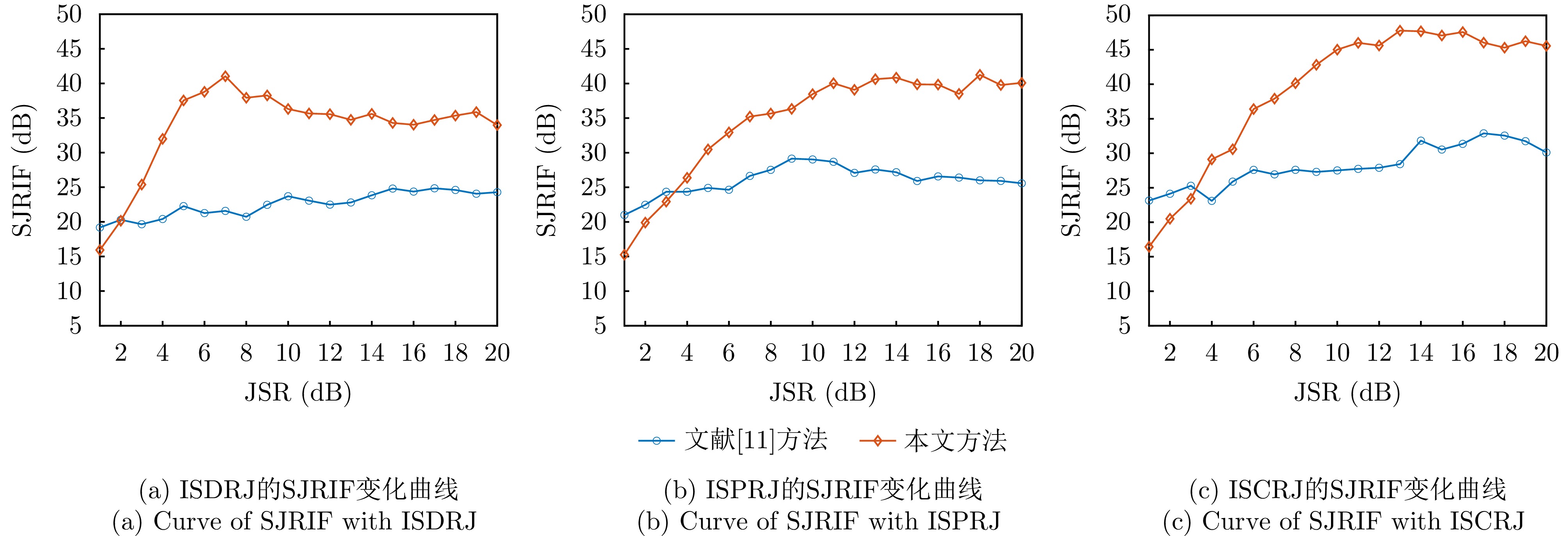
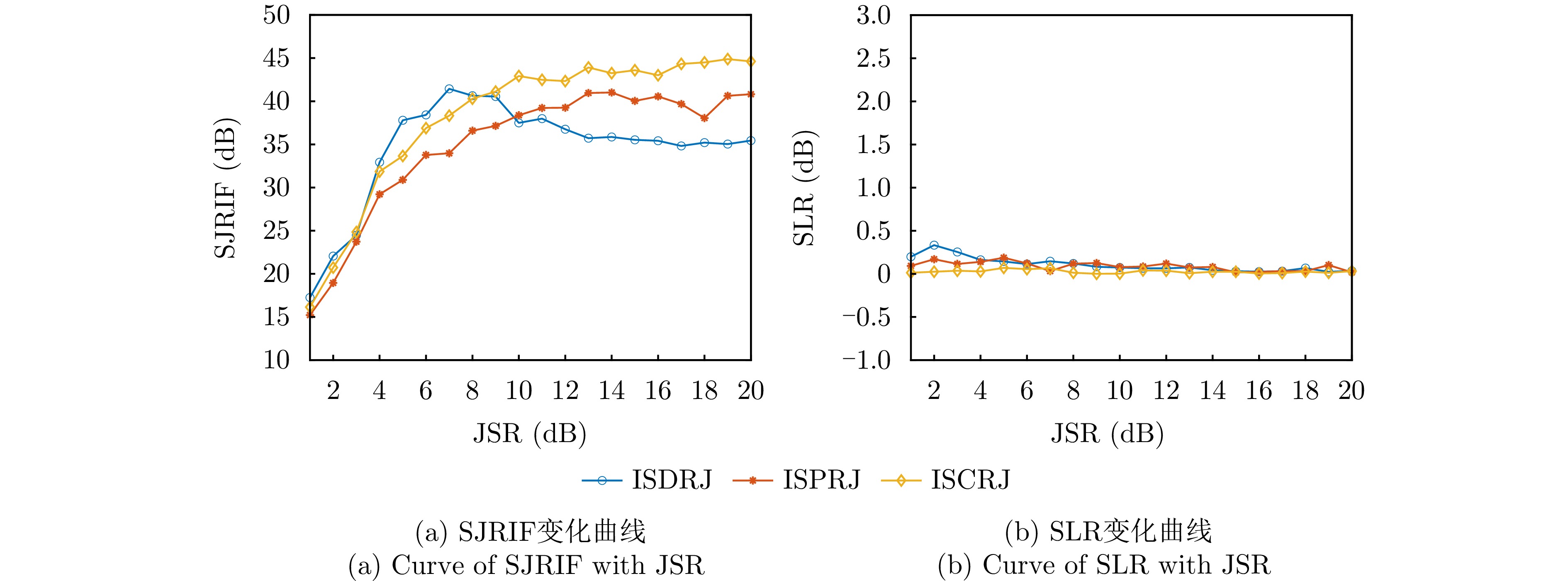
Interrupted Sampling Repeater Jamming (ISRJ) is a type of intra-pulse coherent jamming that can easily generate false targets resembling real ones, thus posing a severe threat to radar systems. Traditional methods for countering ISRJ techniques are relatively passive and often fail to adapt to evolving jamming techniques, leading to residual jamming effects and signal loss. To improve radar’s anti-jamming capabilities, a novel scheme integrating “jamming perception, parameter estimation, and jamming suppression” has been developed in this study. This method begins by using a bidirectional double sliding window pulse edge detector and a sliding truncated matched filter. These devices are used to extract the ISRJ components of received radar signals and accurately estimate the parameters such as sampling duration and period. The jamming components are then reconstructed and eliminated, allowing for effective target detection. Simulation experiments demonstrate that the proposed method effectively overcomes ISRJ across different modulation modes with almost no loss of signal energy. When the jamming-to-noise ratio is 9 dB, the method boosts the signal-to-jamming ratio by over 33 dB after jamming suppression, ensuring robust anti-ISRJ performance.
Interrupted Sampling Repeater Jamming (ISRJ) is a type of intra-pulse coherent jamming that can easily generate false targets resembling real ones, thus posing a severe threat to radar systems. Traditional methods for countering ISRJ techniques are relatively passive and often fail to adapt to evolving jamming techniques, leading to residual jamming effects and signal loss. To improve radar’s anti-jamming capabilities, a novel scheme integrating “jamming perception, parameter estimation, and jamming suppression” has been developed in this study. This method begins by using a bidirectional double sliding window pulse edge detector and a sliding truncated matched filter. These devices are used to extract the ISRJ components of received radar signals and accurately estimate the parameters such as sampling duration and period. The jamming components are then reconstructed and eliminated, allowing for effective target detection. Simulation experiments demonstrate that the proposed method effectively overcomes ISRJ across different modulation modes with almost no loss of signal energy. When the jamming-to-noise ratio is 9 dB, the method boosts the signal-to-jamming ratio by over 33 dB after jamming suppression, ensuring robust anti-ISRJ performance.










2024, 13(6): 1355-1369.
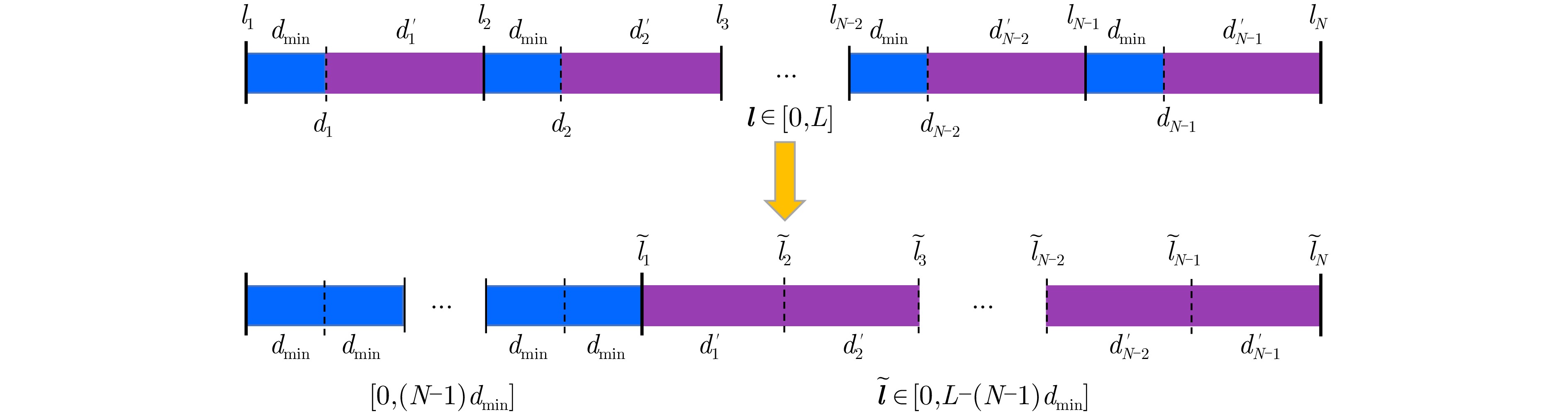
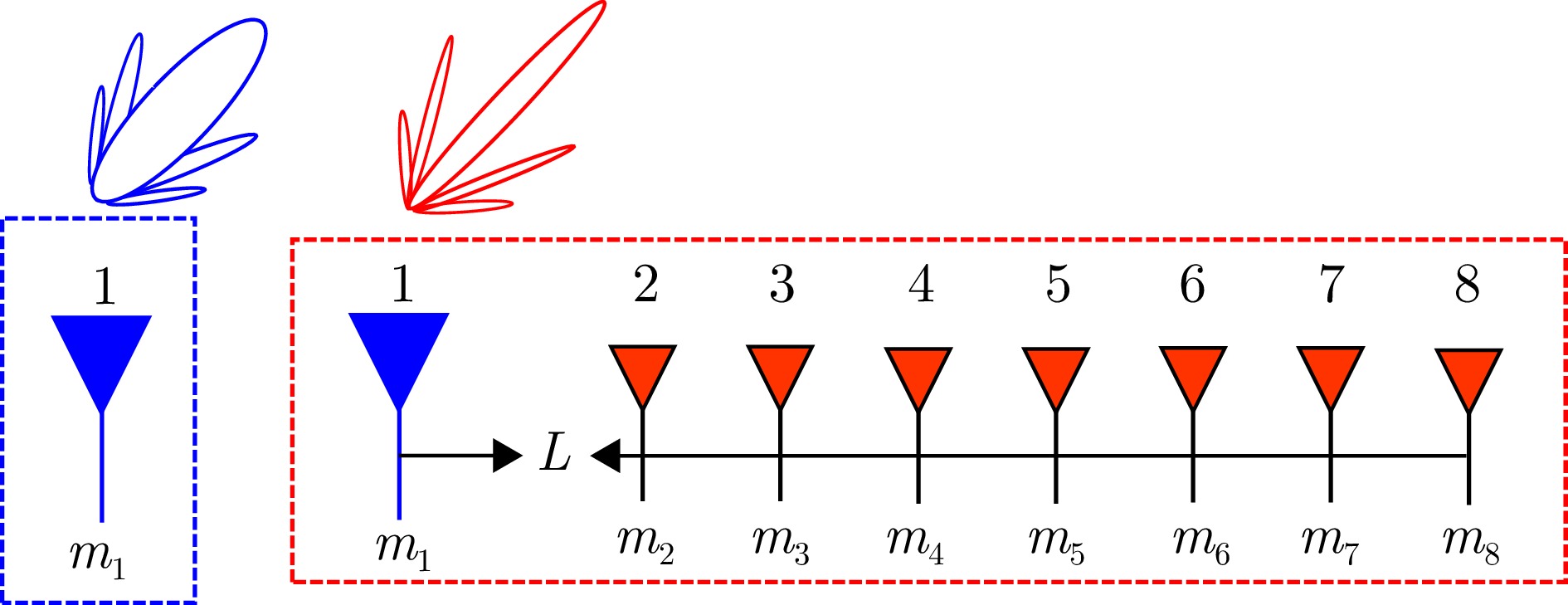
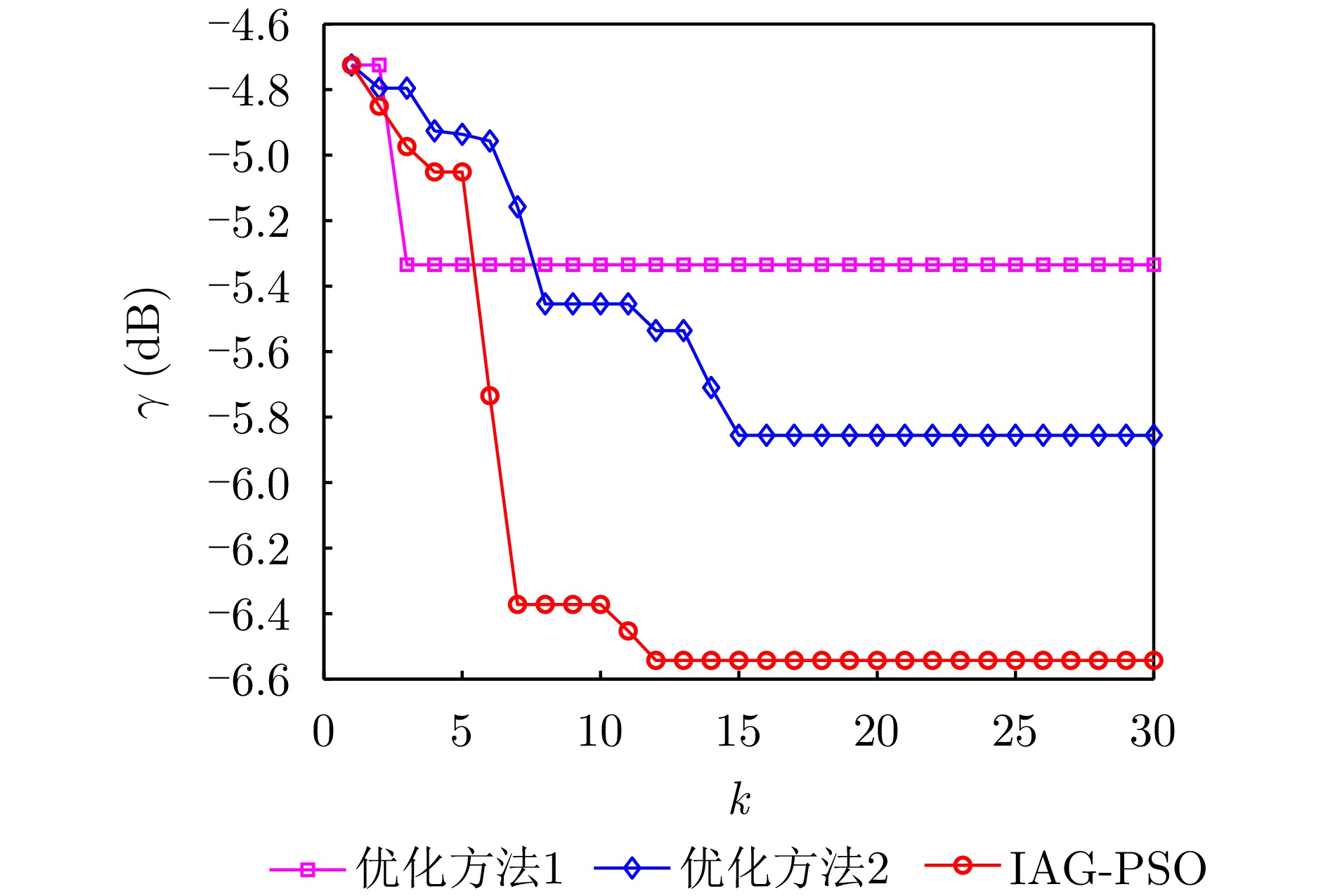
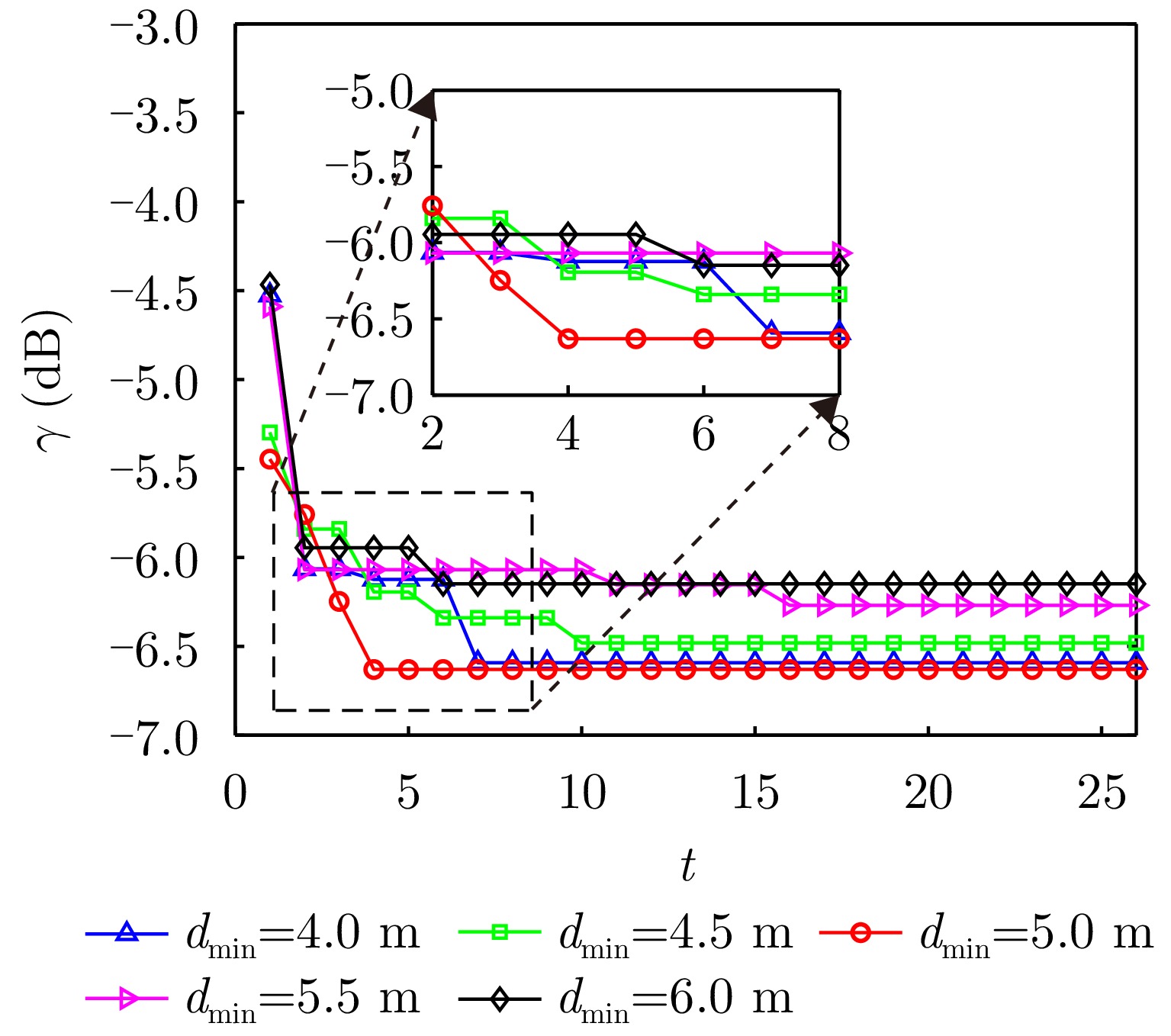
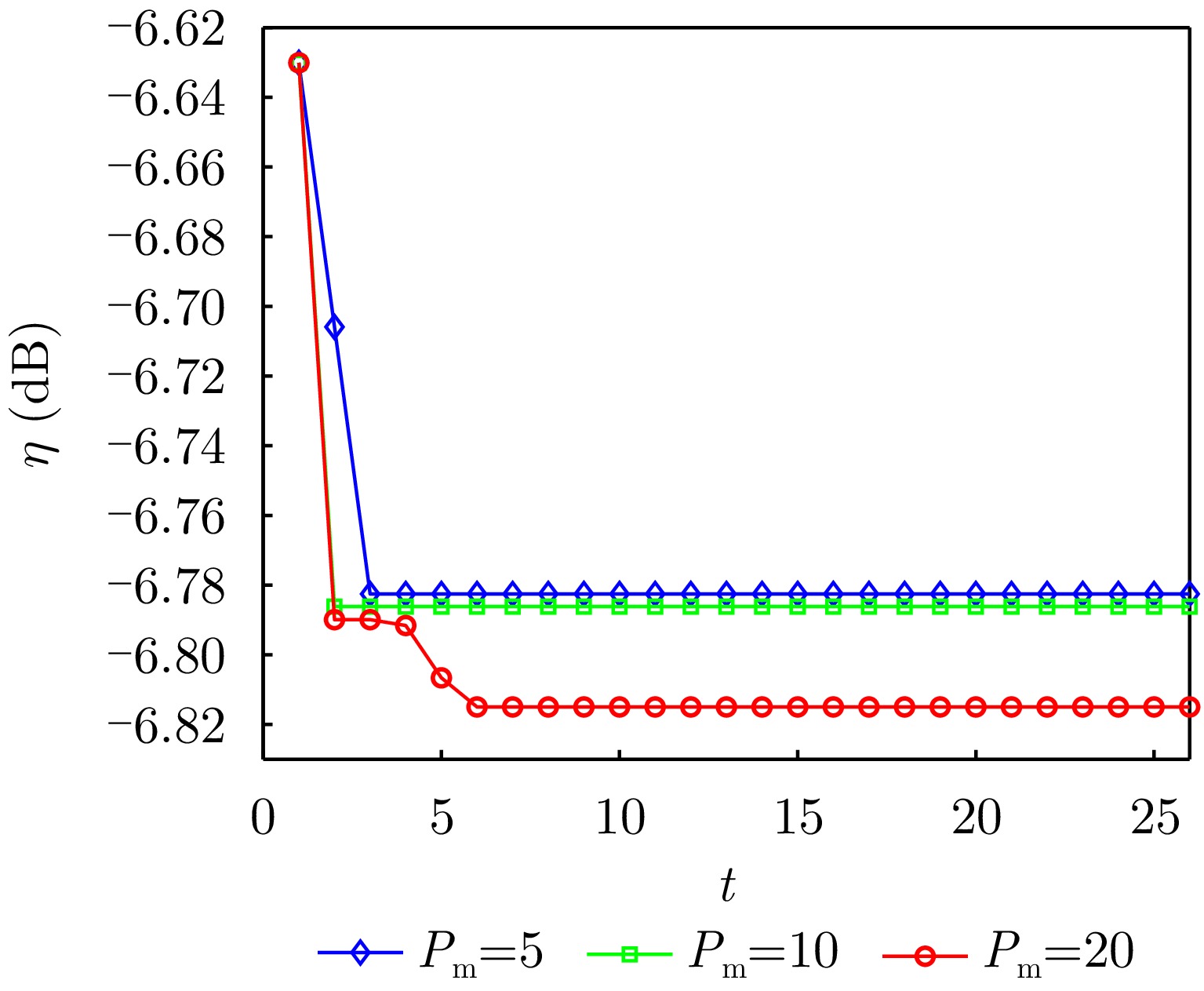
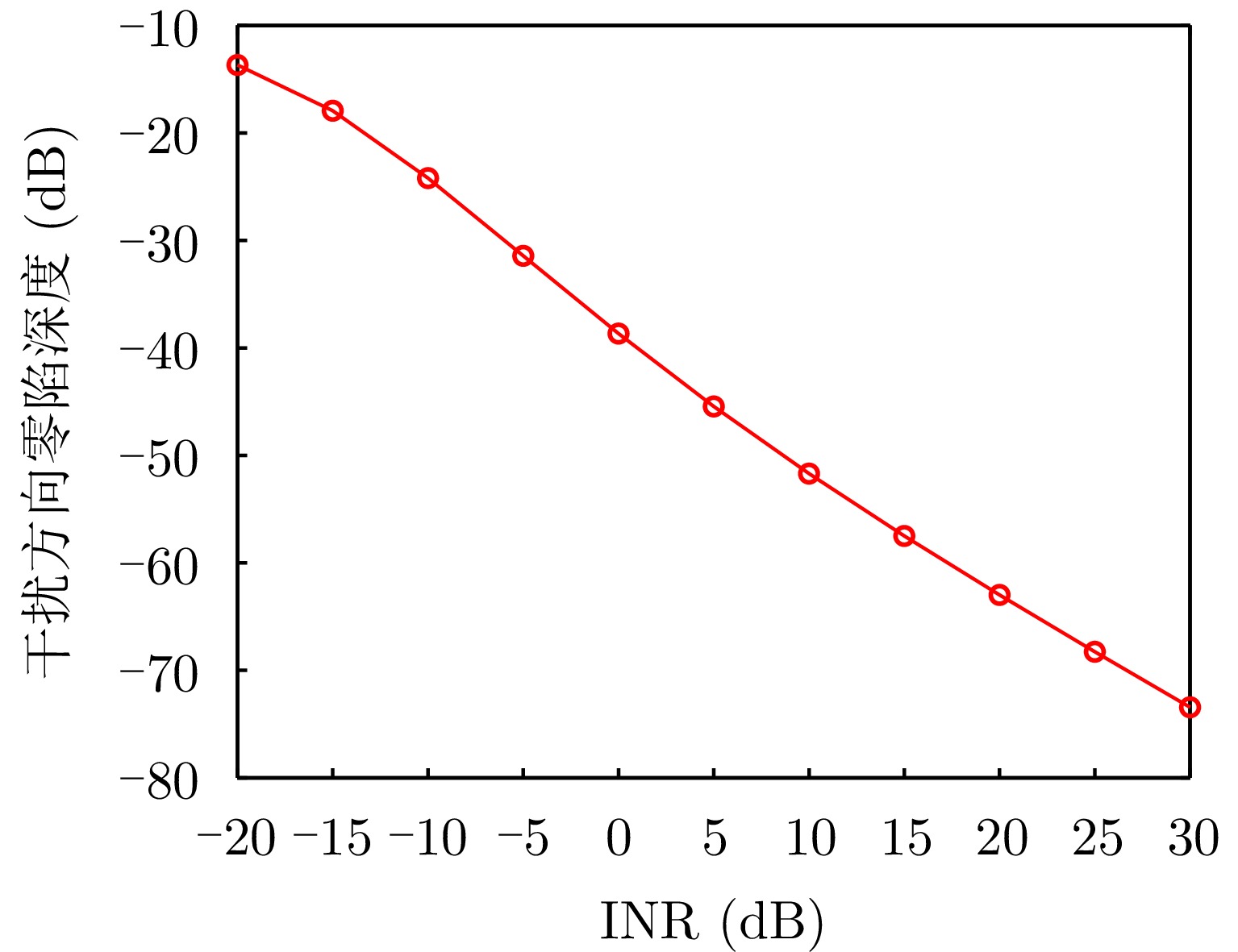
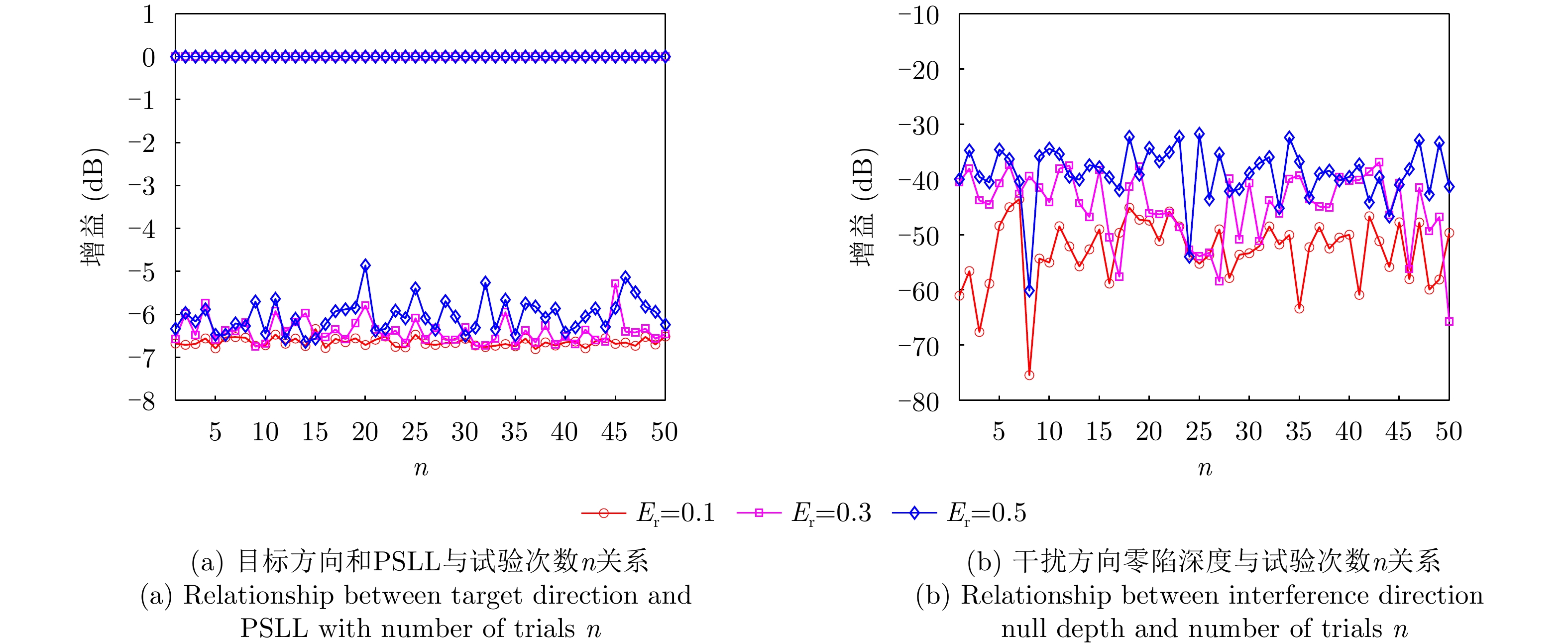
To address the ineffectiveness of single-base radar in suppressing adjoint main-lobe interference, an equivalent large-aperture array can be designed by deploying sparse auxiliary arrays to separate main-lobe interference from targets in the spatial domain. However, this method is prone to generating spatial grating lobes. To overcome this problem, this study proposes a dual-parameter iterative optimization framework comprising two parts: array configuration optimization and subarray element number optimization. Array configuration optimization caters to the number of subarray elements and creates nulls in the main-lobe interference direction on the basis of the minimum variance distortionless response criterion. To suppress grating lobes of the beam an improved adaptive genetic particle swarm algorithm is used to optimize the array configuration under constraints, such as aperture size, minimum subarray spacing, and null depth in the main-lobe interference direction. Subarray element number optimization uses the above-mentioned algorithm to optimize the number of subarray elements under constraints, such as a limited number of subarray elements and null depth in the main-lobe interference direction, further suppressing beam grating lobes. Finally, numerical simulations confirmed the effectiveness of the dual-parameter iterative optimization framework for array configuration and element number under the same parameter conditions. Additionally, this study explores the performance boundaries of main-lobe interference suppression and grating lobe suppression for typical distributed mobile platform cooperative detection scenarios.
To address the ineffectiveness of single-base radar in suppressing adjoint main-lobe interference, an equivalent large-aperture array can be designed by deploying sparse auxiliary arrays to separate main-lobe interference from targets in the spatial domain. However, this method is prone to generating spatial grating lobes. To overcome this problem, this study proposes a dual-parameter iterative optimization framework comprising two parts: array configuration optimization and subarray element number optimization. Array configuration optimization caters to the number of subarray elements and creates nulls in the main-lobe interference direction on the basis of the minimum variance distortionless response criterion. To suppress grating lobes of the beam an improved adaptive genetic particle swarm algorithm is used to optimize the array configuration under constraints, such as aperture size, minimum subarray spacing, and null depth in the main-lobe interference direction. Subarray element number optimization uses the above-mentioned algorithm to optimize the number of subarray elements under constraints, such as a limited number of subarray elements and null depth in the main-lobe interference direction, further suppressing beam grating lobes. Finally, numerical simulations confirmed the effectiveness of the dual-parameter iterative optimization framework for array configuration and element number under the same parameter conditions. Additionally, this study explores the performance boundaries of main-lobe interference suppression and grating lobe suppression for typical distributed mobile platform cooperative detection scenarios.








 微信 | 公众平台
微信 | 公众平台 

