
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
Advances on Penetrating Imaging of Building Layout Technique Using Low Frequency Radio Waves
-
摘要: 在进入陌生建筑物内部之前获取其内部结构信息,能够为反恐作战、灾害救援等多种应用提供服务,具有重要的现实意义和研究价值。低频电磁波能够穿透常见建筑物材料传播,进而安全、稳定、隐蔽地获取墙后目标信息。利用低频电磁波获取墙后信息因此成为建筑物内部结构透视领域的研究重点。为获知该领域的发展脉络,并预测未来可能的发展趋势,该文对21世纪初以来该领域国内外公开文献进行了归纳总结。相关文献的梳理结果表明,利用低频电磁波进行建筑物内部结构穿透探测的技术目前主要包括3类:基于反射波测量的穿墙雷达成像技术、基于透射波测量的射频层析成像技术、基于多径信号的墙体位置估计技术。这3类技术均已取得一定具有实际意义的研究成果。该文围绕这3类技术所涵盖主要内容的发展历程进行了梳理,主要包括穿墙雷达墙后静止目标成像原理、基于穿墙雷达的建筑物内部结构观测模式、基于穿墙雷达成像的建筑物内部结构重建技术、基于射频层析成像的建筑物内部结构反演技术、基于多径信号的墙体位置估计技术,并以此对该领域的发展趋势进行了探讨。总结近20年以来低频电磁波建筑物内部结构透视技术的发展历程,可以发现建筑物内部结构穿透探测平台已由传统的机载、车载平台转向微型机器人、无人机等新型平台,而对应的建筑物内部结构信息重建方法,则由传统的雷达成像技术,发展成包含图像增强、稀疏重构等在内的多种新型方法。这些结果表明,建筑物内部结构透视技术正朝着系统化、多样化、智能化的方向发展。Abstract: Obtaining the internal layout of an unfamiliar building before entering the building has important practical significance and research value, as it can be applied for various services, such as anti-terrorism operations and disaster relief. Low-frequency electromagnetic waves can propagate through common building materials, and then the target information behind the wall is obtained safely and stably. Therefore, using low frequency radio waves to obtain the information behind the wall has become the research focus in the field of building layout reconstruction. To reveal the development context of this field and predict the possible future development trends, this paper summarizes the domestic and foreign public literature in this field since the onset of the 21st century. The results of the relevant literature indicate that the techniques of using low-frequency electromagnetic waves to reconstruct building layout currently include three types: through-the-wall radar imaging technology based on reflected wave measurement, radio-frequency tomography technology based on transmitted wave measurement, and wall position estimation technology based on multipath signals. These three technologies have achieved several practical research results. This article clarifies the development history of the main content covered by these technologies, which mainly includes the principle of through-the-wall radar imaging of stationary targets behind the wall, the observation mode of building internal structure based on through-the-wall radar, the reconstruction technology of building internal structure on the basis of through-the-wall radar imaging, the inversion technology of building internal structure on the basis of radio-frequency tomography, and the wall position estimation technology based on multipath signals. We also discuss the development trend of this field. In the past two decades, the development history of building layout penetrating imaging using low-frequency radio waves shows a change from the traditional airborne and vehicle-mounted building-layout-reconstruction platforms to new platforms such as microrobots and unmanned aerial vehicles. The corresponding reconstruction method has been developed from the traditional radar imaging technology to a variety of new methods, including image enhancement and sparse reconstruction. The results indicate that the building-layout-reconstruction technology is developing in the direction of systematization, diversification, and intelligence.
-
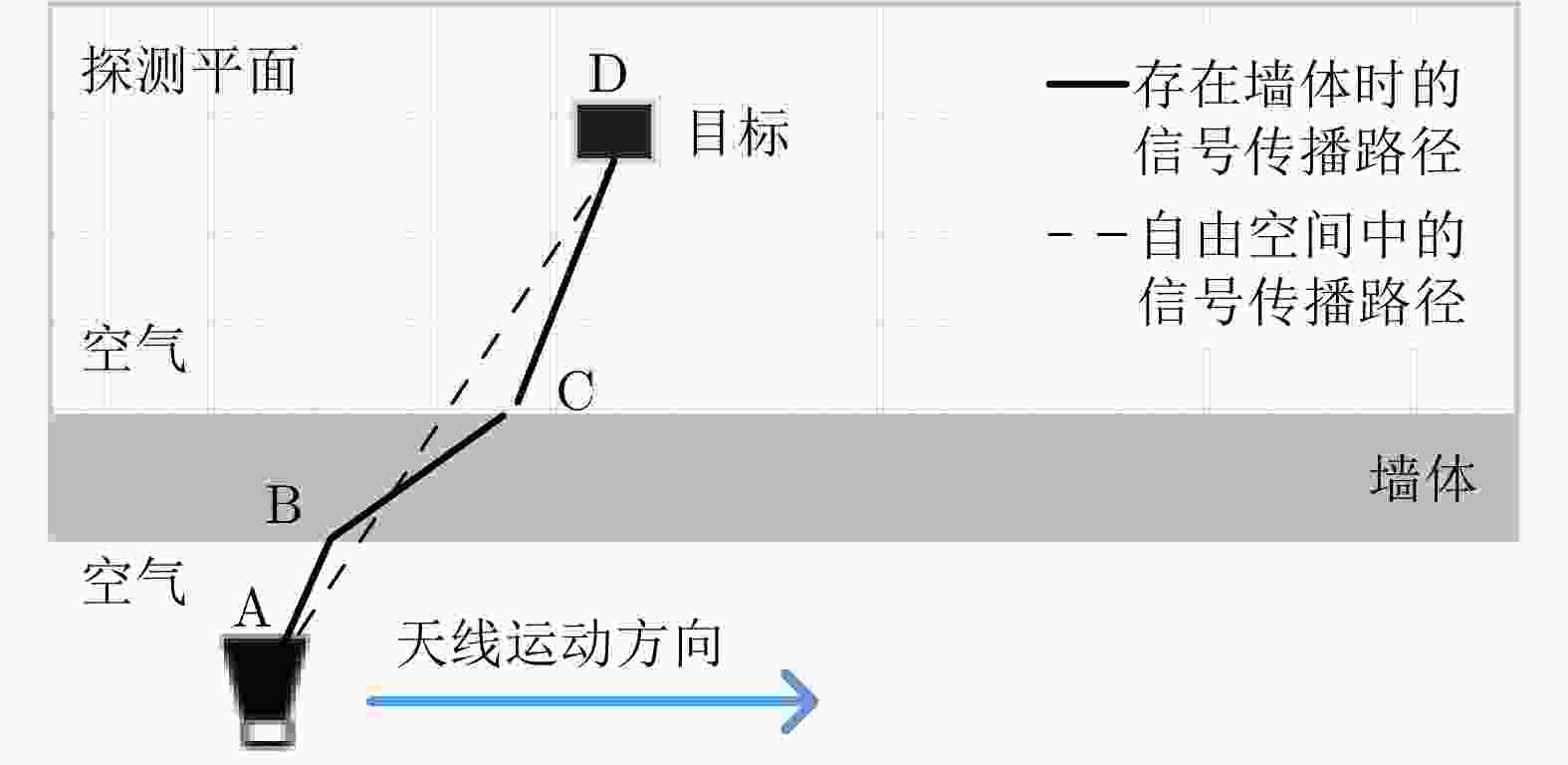
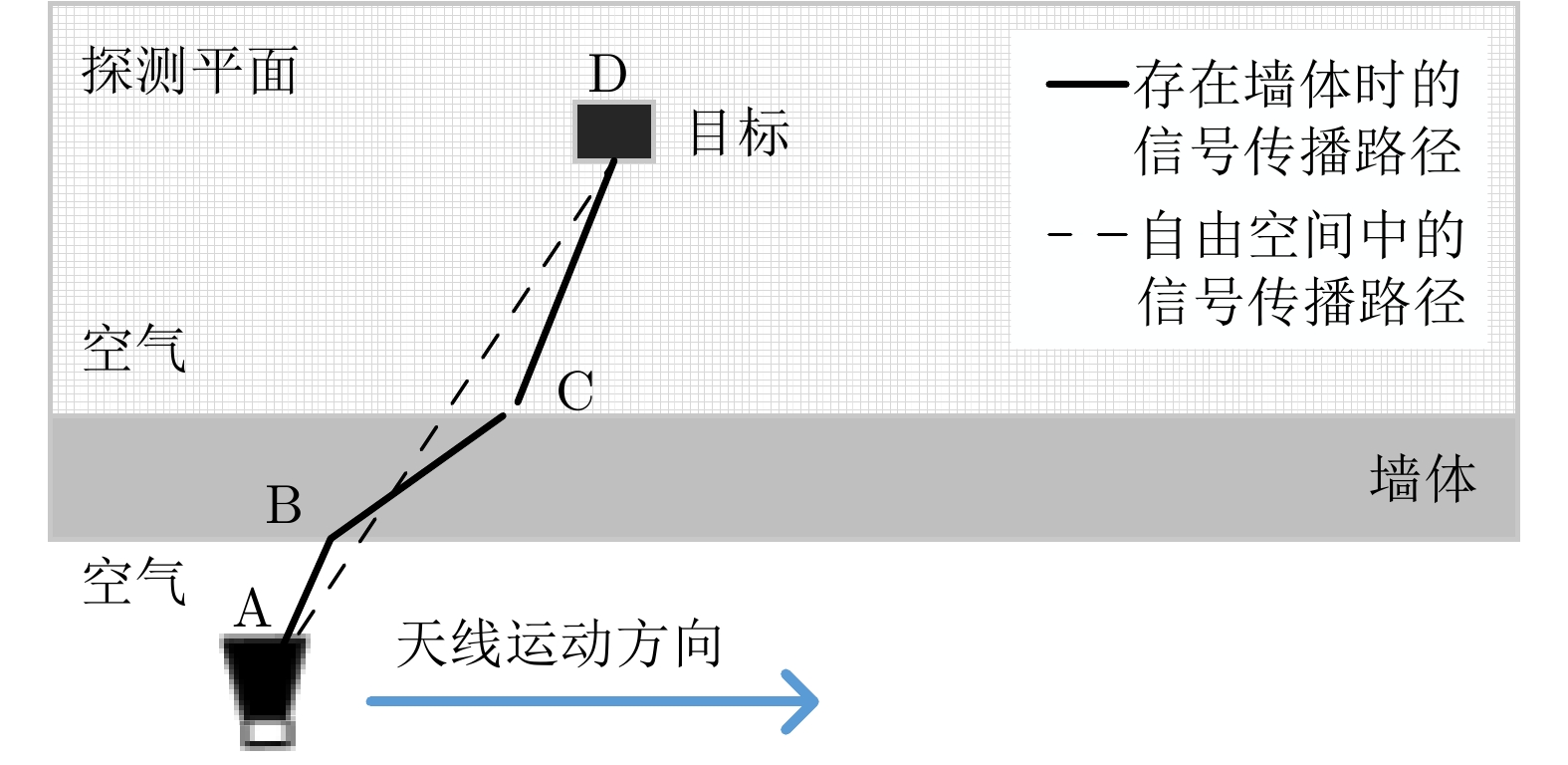
图 1 穿墙探测的一般信号传播模型
Figure 1. General signal propagation model for through-the-wall detection
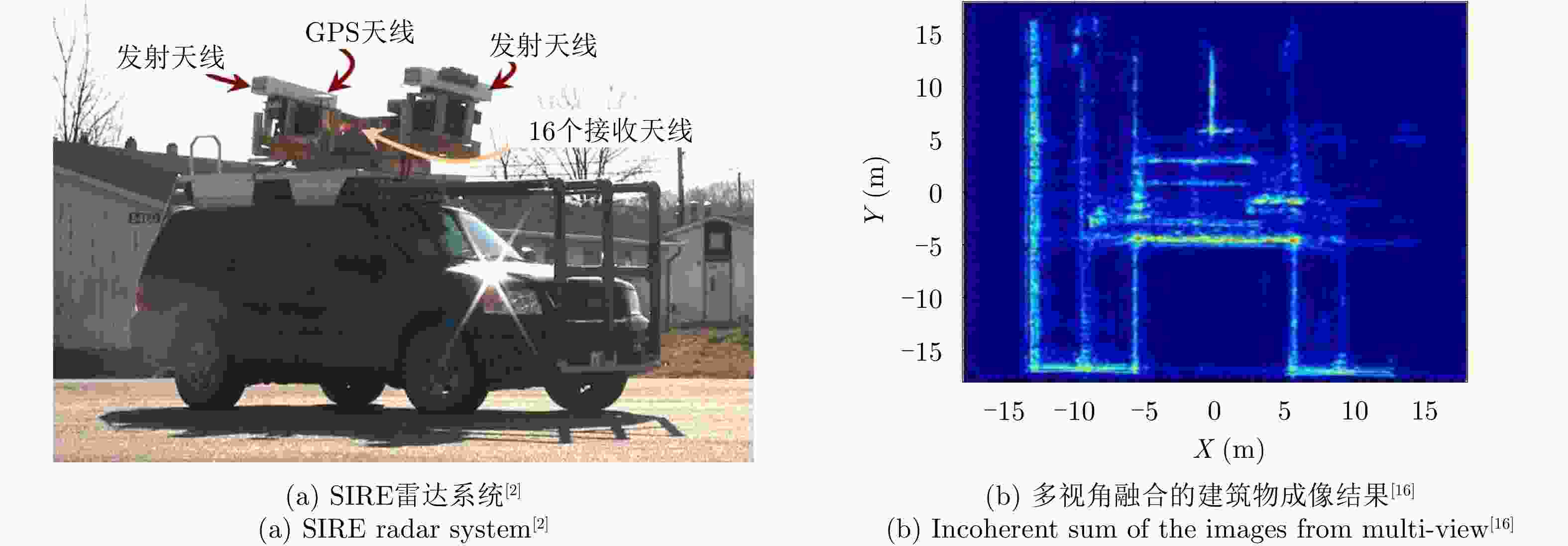
图 2 SIRE在多视角探测模式下的实测数据成像结果
Figure 2. Imaging results of SIRE’s measured data in multi-view detection mode




-
[1] NKWARI P K M, SINHA S, and FERREIRA H C. Through-the-wall radar imaging: A review[J]. IETE Technical Review, 2018, 35(6): 631–639. doi: 10.1080/02564602.2017.1364146 [2] NGUYEN L, RESSLER M, and SICHINA J. Sensing through the wall imaging using the Army Research Lab ultra-wideband synchronous impulse reconstruction (UWB SIRE) radar[C]. The SPIE 6947, Radar Sensor Technology XII, Orlando, USA, 2008: 69470B. doi: 10.1117/12.776869. [3] AHMAD F and AMIN M G. Multi-viewpoint image fusion for urban sensing applications[C]. The SPIE 6968, Signal Processing, Sensor Fusion, and Target Recognition XVII, Orlando, USA, 2008: 69680L. doi: 10.1117/12.782302. [4] SENG C H, BOUZERDOUM A, PHUNG S L, et al. A two-stage image fusion method for enhanced through-the-wall radar target detection[C]. 2011 IEEE RadarCon (RADAR), Kansas City, USA, 2011: 643–647. doi: 10.1109/RADAR.2011.5960616. [5] SENG C H, BOUZERDOUM A, TIVIVE F H C, et al. Fuzzy logic-based image fusion for multi-view through-the-wall radar[C]. 2010 International Conference on Digital Image Computing: Techniques and Applications, Sydney, Australia, 2010: 423–428. doi: 10.1109/DICTA.2010.78. [6] SÉVIGNY P and DIFILIPPO D J. A multi-look fusion approach to through-wall radar imaging[C]. 2013 IEEE Radar Conference (RadarCon13), Ottawa, Canada, 2013: 1–6. doi: 10.1109/RADAR.2013.6586154. [7] SENG C H, BOUZERDOUM A, AMIN M G, et al. Probabilistic fuzzy image fusion approach for radar through wall sensing[J]. IEEE Transactions on Image Processing, 2013, 22(12): 4938–4951. doi: 10.1109/TIP.2013.2279953 [8] PATWARI N and AGRAW P. Effects of correlated shadowing: Connectivity, localization, and RF tomography[C]. 2008 International Conference on Information Processing in Sensor Networks (ipsn 2008), St. Louis, USA, 2008: 82–93. doi: 10.1109/IPSN.2008.7. [9] LI Li and KROLIK J L. Simultaneous target and multipath positioning[J]. IEEE Journal of Selected Topics in Signal Processing, 2014, 8(1): 153–165. doi: 10.1109/JSTSP.2013.2289949 [10] 张驰, 李悦丽, 周智敏. 基于独立分量分析法的稀疏阵列穿墙成像雷达直达波干扰抑制[J]. 雷达学报, 2014, 3(5): 524–532. doi: 10.3724/SP.J.1300.2014.14066ZHANG Chi, LI Yueli, and ZHOU Zhimin. Wall clutter mitigation in through-the-wall imaging radar with sparse array antenna based on independent component analysis[J]. Journal of Radars, 2014, 3(5): 524–532. doi: 10.3724/SP.J.1300.2014.14066 [11] TAN Yunhua, WANG Libo, and LI Lianlin. A novel probability model for suppressing multipath ghosts in GPR and TWI Imaging: A numerical study[J]. Journal of Radars, 2015, 4(5): 509–517. doi: 10.12000/JR15056 [12] JIN Tian, CHEN Bo, and ZHOU Zhimin. Image-domain estimation of wall parameters for autofocusing of through-the-wall SAR imagery[J]. IEEE Transactions on Geoscience and Remote Sensing, 2013, 51(3): 1836–1843. doi: 10.1109/TGRS.2012.2206395 [13] FALCONER D G and UEBERSCHAER R M. Floor-plan radar[C]. The SPIE 4033, Radar Sensor Technology V, Orlando, USA, 2000, doi: 10.1117/12.391842. [14] DOGARU T and LE C. SAR images of rooms and buildings based on FDTD computer models[J]. IEEE Transactions on Geoscience and Remote Sensing, 2009, 47(5): 1388–1401. doi: 10.1109/TGRS.2009.2013841 [15] DOGARU T and LE C. Through-the-wall radar simulations for complex room imaging[R]. ARL-TR-5205, 2010. [16] LE C, DOGARU T, NGUYEN L, et al. Ultrawideband (UWB) radar imaging of building interior: Measurements and predictions[J]. IEEE Transactions on Geoscience and Remote Sensing, 2009, 47(5): 1409–1420. doi: 10.1109/TGRS.2009.2016653 [17] LE C, NGUYEN L, and DOGARU T. Radar imaging of a large building based on near-field Xpatch model[C]. 2010 IEEE Antennas and Propagation Society International Symposium, Toronto, Canada, 2010: 1–4. doi: 10.1109/APS.2010.5562119. [18] JIA Yong, ZHONG Xiaoling, LIU Jiangang, et al. Single-side two-location spotlight imaging for building based on MIMO through-wall-radar[J]. Sensors, 2016, 16(9): 1441. doi: 10.3390/s16091441 [19] DE WIT J J M, VAN ROSSUM W L, and SMITS F M A. SAPPHIRE: A novel building mapping radar[C]. 2009 European Radar Conference (EuRAD), Rome, Italy, 2009: 625–628. [20] SMITS F M A, DE WIT J J M, VAN ROSSUM W L, et al. 3D mapping of buildings with SAPPHIRE[C]. The 6th Electro-Magnetic Remote Sensing - Defence Technology Centre (EMRS DTC) Technical Conference, Edinburgh, UK, 2009. [21] BROWNE K E, BURKHOLDER R J, and VOLAKIS J L. A novel low-profile portable radar system for high resolution through-wall radar imaging[C]. 2010 IEEE Radar Conference, Washington, USA, 2010: 333–338. doi: 10.1109/RADAR.2010.5494602. [22] SONG Yongping, ZHU Jiahua, HU Jun, et al. Grating lobes suppression for ultra-wideband MIMO radar imaging[C]. The 2017 3rd IEEE International Conference on Computer and Communications (ICCC), Chengdu, China, 2017: 957–961. doi: 10.1109/CompComm.2017.8322685. [23] BRAGA A J and GENTILE C. An ultra-wideband radar system for through-the-wall imaging using a mobile robot[C]. 2009 IEEE International Conference on Communications, Dresden, Germany, 2009: 1–6. doi: 10.1109/ICC.2009.5198740. [24] FALCONER D G, FICKLIN R W, and KONOLIGE K G. Detection, location, and identification of building occupants using a robot-mounted through-wall radar[C]. The SPIE 4037, Digitization of the Battlespace V and Battlefield Biomedical Technologies II, Orlando, USA, 2000, doi: 10.1117/12.395028. [25] SONG Yongping, ZHU Jiahua, HU Jun, et al. Enhanced imaging of building interior for portable MIMO through-the-wall radar[J]. Journal of Physics, 2018, 960: 012023. [26] SAKAMOTO T and SATO T. A method of estimating a room shape using a single antenna in a multipath environment[C]. The 4th European Conference on Antennas and Propagation, Barcelona, Spain, 2010: 1–5. [27] YEKTAKHAH B and SARABANDI K. All-directions through-the-wall radar imaging using a small number of moving transceivers[J]. IEEE Transactions on Geoscience and Remote Sensing, 2016, 54(11): 6415–6428. doi: 10.1109/TGRS.2016.2585112 [28] YEKTAKHAH B and SARABANDI K. All-directions through-the-wall imaging using a small number of moving omnidirectional bi-static FMCW transceivers[J]. IEEE Transactions on Geoscience and Remote Sensing, 2019, 57(5): 2618–2627. doi: 10.1109/TGRS.2018.2875695 [29] YEKTAKHAH B and SARABANDI K. A method for detection of walls and large flat surfaces in through-the-wall SAR imaging[C]. 2019 IEEE International Symposium on Antennas and Propagation and USNC-URSI Radio Science Meeting, Atlanta, USA, 2019: 815–816. doi: 10.1109/APUSNCURSINRSM.2019.8889357. [30] ABEDI H and ZAKERI B. Through-the-multilayered wall imaging using passive synthetic aperture radar[J]. IEEE Transactions on Geoscience and Remote Sensing, 2019, 57(7): 4181–4191. doi: 10.1109/TGRS.2018.2890027 [31] BARANOSKI E J. VisiBuilding: Sensing through walls[C]. The 4th IEEE Workshop on Sensor Array and Multichannel Processing, Waltham, USA, 2006: 1–22. doi: 10.1109/SAM.2006.1706221. [32] BARANOSKI E J. Through-wall imaging: Historical perspective and future directions[J]. Journal of the Franklin Institute, 2008, 345(6): 556–569. doi: 10.1016/j.jfranklin.2008.01.005 [33] SUBOTIC N, KEYDEL E, BURNS J, et al. Parametric reconstruction of internal building structures via canonical scattering mechanisms[C]. 2008 IEEE International Conference on Acoustics, Speech and Signal Processing, Las Vegas, USA, 2008: 5189–5192. doi: 10.1109/ICASSP.2008.4518828. [34] BUONANNO A, D’URSO M, PRISCO G, et al. An improved radar system for inside-building awareness[C]. 2012 Tyrrhenian Workshop on advances in radar and remote sensing (TyWRRS), Naples, Italy, 2012: 85–89. doi: 10.1109/TyWRRS.2012.6381109. [35] AFTANAS I M. Through wall imaging with UWB Radar system[D]. [Ph. D. dissertation], Technical University of Košice, 2009: 68–75. [36] AFTANAS M and DRUTAROVSKÝ M. Imaging of the building contours with through the wall UWB radar system[J]. Radioengineering, 2009, 18(3): 258–264. [37] 贾勇, 孔令讲, 马静, 等. 穿墙雷达多视角建筑布局成像[J]. 电子与信息学报, 2013, 35(5): 1114–1119. doi: 10.3724/SP.J.1146.2012.01056JIA Yong, KONG Lingjiang, MA Jing, et al. Through-wall-radar multi-view imaging for architectural layout of building[J]. Journal of Electronics &Information Technology, 2013, 35(5): 1114–1119. doi: 10.3724/SP.J.1146.2012.01056 [38] JIA Yong, CUI Guolong, KONG Lingjiang, et al. Multichannel and multiview imaging approach to building layout determination of through-wall radar[J]. IEEE Geoscience and Remote Sensing Letters, 2014, 11(5): 970–974. doi: 10.1109/LGRS.2013.2283778 [39] 姚雪. 透视雷达建筑布局多视角成像算法研究[D]. [硕士论文], 电子科技大学, 2015: 41–44.YAO Xue. Perspective dectection research about the multi-view imaging of building layout[D]. [Master dissertation], University of Electronic Science and Technology of China, 2015: 41–44. [40] 唐茜, 晋良念. 多方位多尺度建筑物布局成像融合方法[J]. 雷达科学与技术, 2019, 17(1): 83–88, 93. doi: 10.3969/j.issn.1672-2337.2019.01.015TANG Qian and JIN Liangnian. Multi-azimuth and multi-scale building layout imaging fusion method[J]. Radar Science and Technology, 2019, 17(1): 83–88, 93. doi: 10.3969/j.issn.1672-2337.2019.01.015 [41] JIA Yong, CHEN Shengyi, SONG Ruiyuan, et al. Building layout determination based on generative adversarial nets in through-wall radar imaging[C]. 2019 IEEE International Conference on Signal, Information and Data Processing, Chongqing, China, 2019: 1–6. [42] 陈波. 基于图理论的穿墙雷达建筑物布局重构技术研究[D]. [博士论文], 国防科学技术大学, 2014: 77–82.CHEN Bo. Study on building layout reconstruction techniques based on graph theory from through-the-wall radar[D]. [Ph. D. dissertation], National University of Defense Technology, 2014: 77–82. [43] CHEN Bo, JIN Tian, LU Biying, et al. Building interior layout reconstruction from through-the-wall radar image using MST-based method[J]. EURASIP Journal on Advances in Signal Processing, 2014, 2014(1): 1–9. doi: 10.1186/1687-6180-2014-1 [44] 陈波, 金添, 陆必应, 等. 穿墙雷达中基于最小生成树的建筑物内部结构重构技术[J]. 电子学报, 2015, 43(9): 1682–1688. doi: 10.3969/j.issn.0372-2112.2015.09.002CHEN Bo, JIN Tian, LU Biying, et al. Building interior structure reconstruction from through-the-wall radar image using MST-based method[J]. Acta Electronica Sinica, 2015, 43(9): 1682–1688. doi: 10.3969/j.issn.0372-2112.2015.09.002 [45] LAGUNAS E, AMIN M G, AHMAD F, et al. Compressive sensing for through wall radar imaging of stationary scenes using arbitrary data measurements[C]. The 2012 11th International Conference on Information Science, Signal Processing and their Applications (ISSPA), Montreal, Canada, 2012: 1347–1352. doi: 10.1109/ISSPA.2012.6310503. [46] LAGUNAS E, AMIN M G, AHMAD F, et al. Sparsity-based radar imaging of building structures[C]. The 20th European Signal Processing Conference (EUSIPCO), Bucharest, Romania, 2012: 864–868. [47] 金添, 宋勇平. 超宽带雷达建筑物结构稀疏成像[J]. 雷达学报, 2018, 7(3): 275–284. doi: 10.12000/JR18031JIN Tian and SONG Yongping. Sparse imaging of building layouts in ultra-wideband radar[J]. Journal of Radars, 2018, 7(3): 275–284. doi: 10.12000/JR18031 [48] ZHAO Jifang, JIN Liangnian, and LIU Qinghua. Through-the-wall radar sparse imaging for building walls[J]. The Journal of Engineering, 2019, 2019(21): 7403–7405. doi: 10.1049/joe.2019.0541 [49] 杨俊刚. 利用稀疏信息的正则化雷达成像理论与方法研究[D]. [博士论文], 国防科学技术大学, 2013: 1–2.YANG Jungang. Research on sparsity-driven regularization radar imaging theory and method[D]. [Ph. D. dissertation], National University of Defense Technology, 2013: 1–2. [50] SUNDARAM R, MARTIN R, and ANDERSON C. Regularization in radio tomographic imaging[C]. The SPIE 8753, Wireless Sensing, Localization, and Processing VIII, Baltimore, USA, 2013: 87530O. doi: 10.1117/12.2012167. [51] WILSON J and PATWARI N. Radio tomographic imaging with wireless networks[J]. IEEE Transactions on Mobile Computing, 2010, 9(5): 621–632. doi: 10.1109/TMC.2009.174 [52] LIU Heng, WANG Zhenghuan, BU Xiangyuan, et al. Image reconstruction algorithms for radio tomographic imaging[C]. 2012 IEEE International Conference on Cyber Technology in Automation, Control, and Intelligent Systems (CYBER), Bangkok, Thailand, 2012: 48–53. doi: 10.1109/CYBER.2012.6392525. [53] MOSTOFI Y and SEN P. Compressed mapping of communication signal strength[C]. MILCOM 2008 - 2008 IEEE Military Communications Conference, San Diego, USA, 2008: 1–7. doi: 10.1109/MILCOM.2008.4753442. [54] MOSTOFI Y. Compressive cooperative sensing and mapping in mobile networks[J]. IEEE Transactions on Mobile Computing, 2011, 10(12): 1769–1784. doi: 10.1109/TMC.2011.31 [55] MOSTOFI Y. Cooperative wireless-based obstacle/object mapping and see-through capabilities in robotic networks[J]. IEEE Transactions on Mobile Computing, 2013, 12(5): 817–829. doi: 10.1109/TMC.2012.32 [56] GONZALEZ-RUIZ A, GHAFFARKHAH A, and MOSTOFI Y. An integrated framework for obstacle mapping with see-through capabilities using laser and wireless channel measurements[J]. IEEE Sensors Journal, 2014, 14(1): 25–38. doi: 10.1109/JSEN.2013.2278394 [57] DEPATLA S, BUCKLAND L, and MOSTOFI Y. X-ray vision with only WiFi power measurements using Rytov wave models[J]. IEEE Transactions on Vehicular Technology, 2015, 64(4): 1376–1387. doi: 10.1109/TVT.2015.2397446 [58] DEPATLA S, KARANAM C R, and MOSTOFI Y. Robotic through-wall imaging: Radio-frequency imaging possibilities with unmanned vehicles[J]. IEEE Antennas and Propagation Magazine, 2017, 59(5): 47–60. doi: 10.1109/MAP.2017.2731302 [59] KARANAM C R and MOSTOFI Y. 3D through-wall imaging with unmanned aerial vehicles using WiFi[C]. The 2017 16th ACM/IEEE International Conference on Information Processing in Sensor Networks (IPSN), Pittsburgh, USA, 2017: 131–142. [60] HAMILTON B R, MA Xiaoli, BAXLEY R J, et al. Radio frequency tomography in mobile networks[C]. 2012 IEEE Statistical Signal Processing Workshop (SSP), Ann Arbor, USA, 2012: 508–511. doi: 10.1109/SSP.2012.6319745. [61] BECK B, BAXLEY R and MA Xiaoli. Regularization techniques for floor plan estimation in radio tomographic imaging[C]. 2013 IEEE Global Conference on Signal and Information Processing, Austin, USA, 2013: 177–180. doi: 10.1109/GlobalSIP.2013.6736844. [62] XU Shengxin, LIU Heng, GAO Fei, et al. Experimental verification: Enabling obstacle mapping based on radio tomographic imaging[C]. The 2018 IEEE 88th Vehicular Technology Conference (VTC-Fall), Chicago, USA, 2018: 1–5. doi: 10.1109/VTCFall.2018.8690867. [63] GUO Qichang, LI Yanlei, LIANG Xingdong, et al. Through-the-wall image reconstruction via reweighted total variation and prior information in radio tomographic imaging[J]. IEEE Access, 2020, 8: 40057–40066. doi: 10.1109/ACCESS.2020.2976769 [64] ZHANG Yang, CUI Guolong, RAN Qingxin, et al. Knowledge-assisted building layout reconstruction for through-the-wall radar imaging[C]. 2020 IEEE Radar Conference, Florence, Italy, 2020: 1–5. [65] CHEN Jiahui, CUI Guolong, LIU Xinyu, et al. Strong scatterer reconstruction based on chirp-pulse microwave computed tomography[C]. 2019 IEEE International Conference on Signal, Information and Data Processing, Chongqing, China, 2019: 1–4. [66] GUO Qichang, LI Yanlei, LIANG Xingdong, et al. A novel CT-mode through-the-wall imaging method based on time delay estimation[J]. IEEE Geoscience and Remote Sensing Letters, 2020, in press. doi: 10.1109/LGRS.2020.3000423 [67] HOLL P M and REINHARD F. Holography of Wi-Fi radiation[J]. Physical Review Letters, 2017, 118(18): 183901. doi: 10.1103/PhysRevLett.118.183901 [68] LIU Jiangang, CUI Guolong, JIA Yong, et al. Sidewall detection using multipath in through-wall radar moving target tracking[J]. IEEE Geoscience and Remote Sensing Letters, 2015, 12(6): 1372–1376. doi: 10.1109/LGRS.2015.2403133 [69] 刘剑刚. 穿墙雷达隐蔽目标成像跟踪方法研究[D]. [博士论文], 电子科技大学, 2017: 95–106.LIU Jiangang. Imaging-tracking technology for hidden targets of a through-the-wall radar[D]. [Ph. D. dissertation], University of Electronic Science and Technology of China, 2017: 95–106. [70] GUO Shishen, CUI Guolong, KONG Lingjiang, et al. Multipath analysis and exploitation for MIMO through-the-wall imaging radar[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2018, 11(10): 3721–3731. doi: 10.1109/JSTARS.2018.2865746 [71] YANG Xiaqing, FAN Shihao, GUO Shisheng, et al. NLOS target localization behind an L-shaped corner with an L-band UWB radar[J]. IEEE Access, 2020, 8: 31270–31286. doi: 10.1109/ACCESS.2020.2973046 [72] LI Songlin, CUI Guolong, GUO Shisheng, et al. On the electromagnetic diffraction propagation model and applications[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2020, 13: 884–895. doi: 10.1109/JSTARS.2020.2974529 -

 下载:
下载:











图(24)
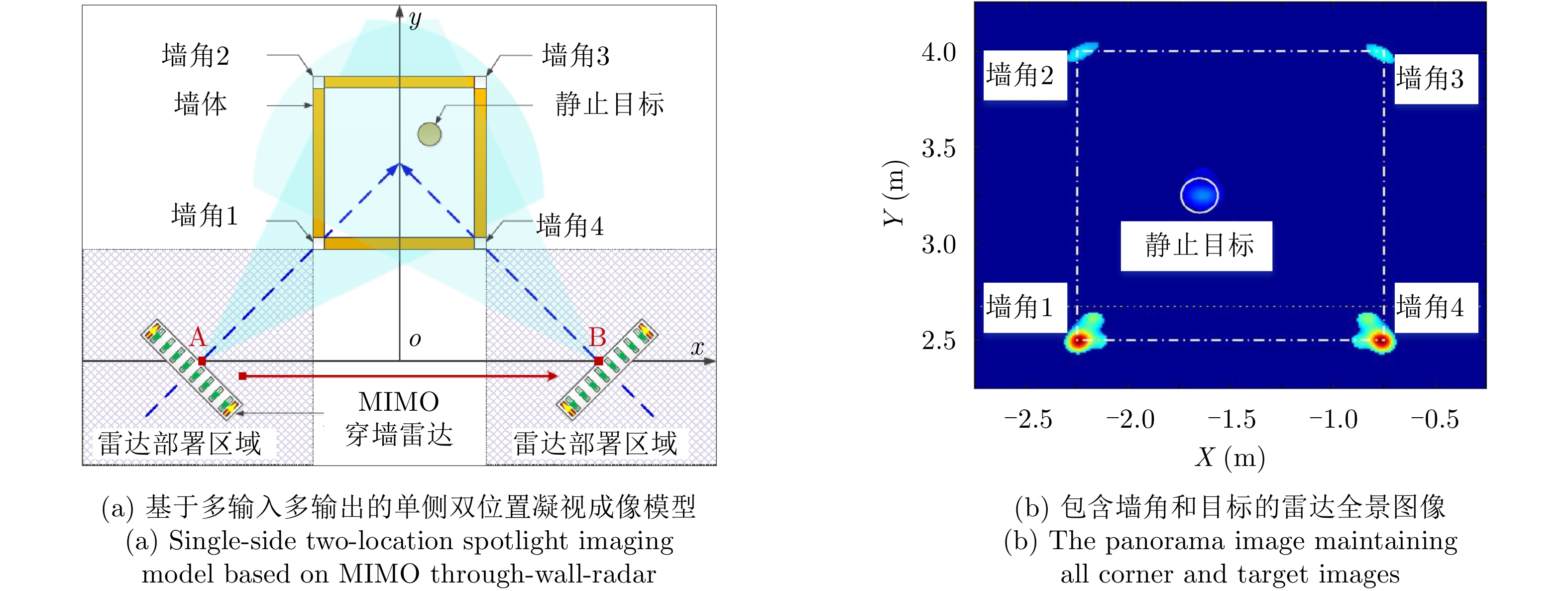
计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

