
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
-
摘要: 飞机尾流是飞机飞行时在其后方产生的一对反向旋转的强烈湍流,对后续飞机飞行安全具有重大影响,其探测已成为制约机场容量增长和影响空中交通安全管理的瓶颈,亟需发展飞机尾流雷达探测和监视的技术与系统。该文构建了基于激光雷达探测的飞机尾流特征参数反演系统,可基于实测数据反演得到尾流涡心位置和速度环量等特征参数。同时构建了尾流动力学、散射特性与雷达回波仿真模块,可实现参数反演算法的性能评估。该系统的参数反演性能优良,运行稳定,可为机场安全管控提供有效技术手段,为飞机尾流的短时行为预测、危害评估和动态间隔标准制定等提供基础支撑。Abstract: Aircraft wake are a couple of counter-rotating vortices generated by a flying aircraft, which can be very hazardous to a follower aircraft. The detection of it is regarded as a key issue for airport capacity improvement and air traffic safety management. To this end, we constructed a Lidar detection based aircraft wake vortex parameter-retrieval system, which can be used to retrieve the vortex-core positions and circulations from detected data. Furthermore, dynamics, scattering and Lidar echo simulation modules were built to validate the parameter-retrieval algorithms. Results show that the proposed system performs well and runs steadily, which can serve as a good tool for aircraft wake vortex characterization, prediction, and is very helpful to establish dynamic wake separation in air traffic management.
-
Key words:
- Lidar /
- Aircraft wake vortex /
- Parameter-retrieval /
- Detection
-
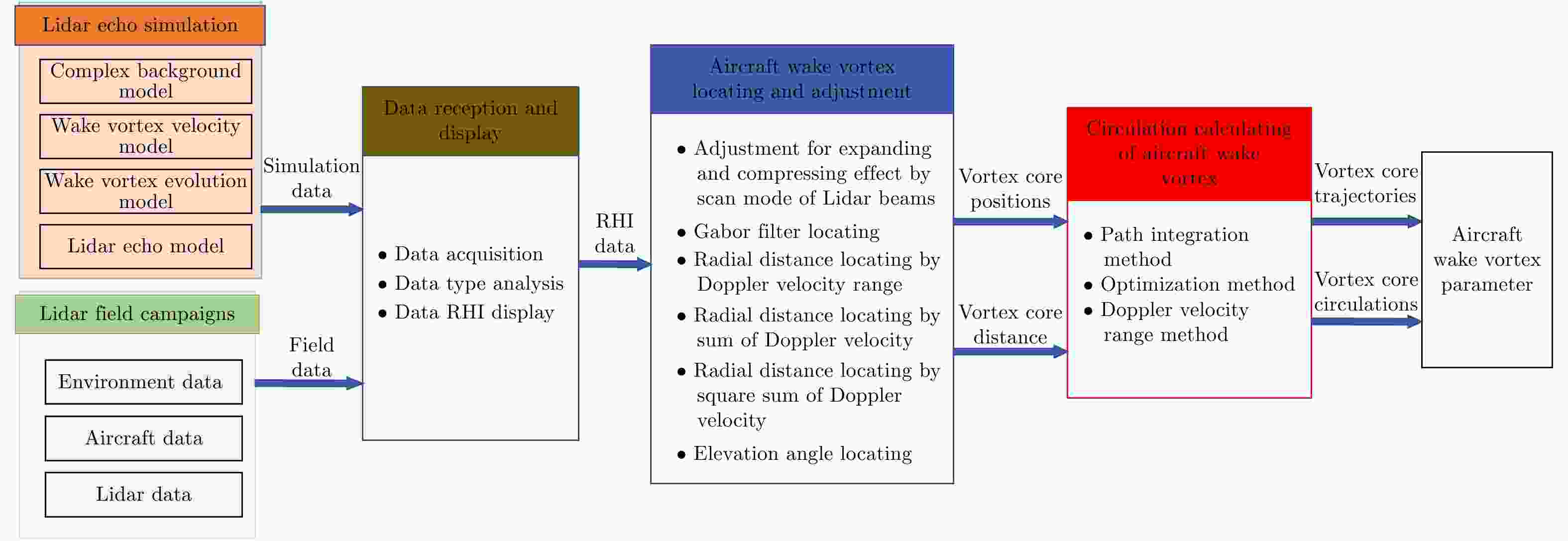
图 1 飞机尾流特征参数反演系统流程图
Figure 1. Flow chart of aircraft wake vortex parameter-retrieval system
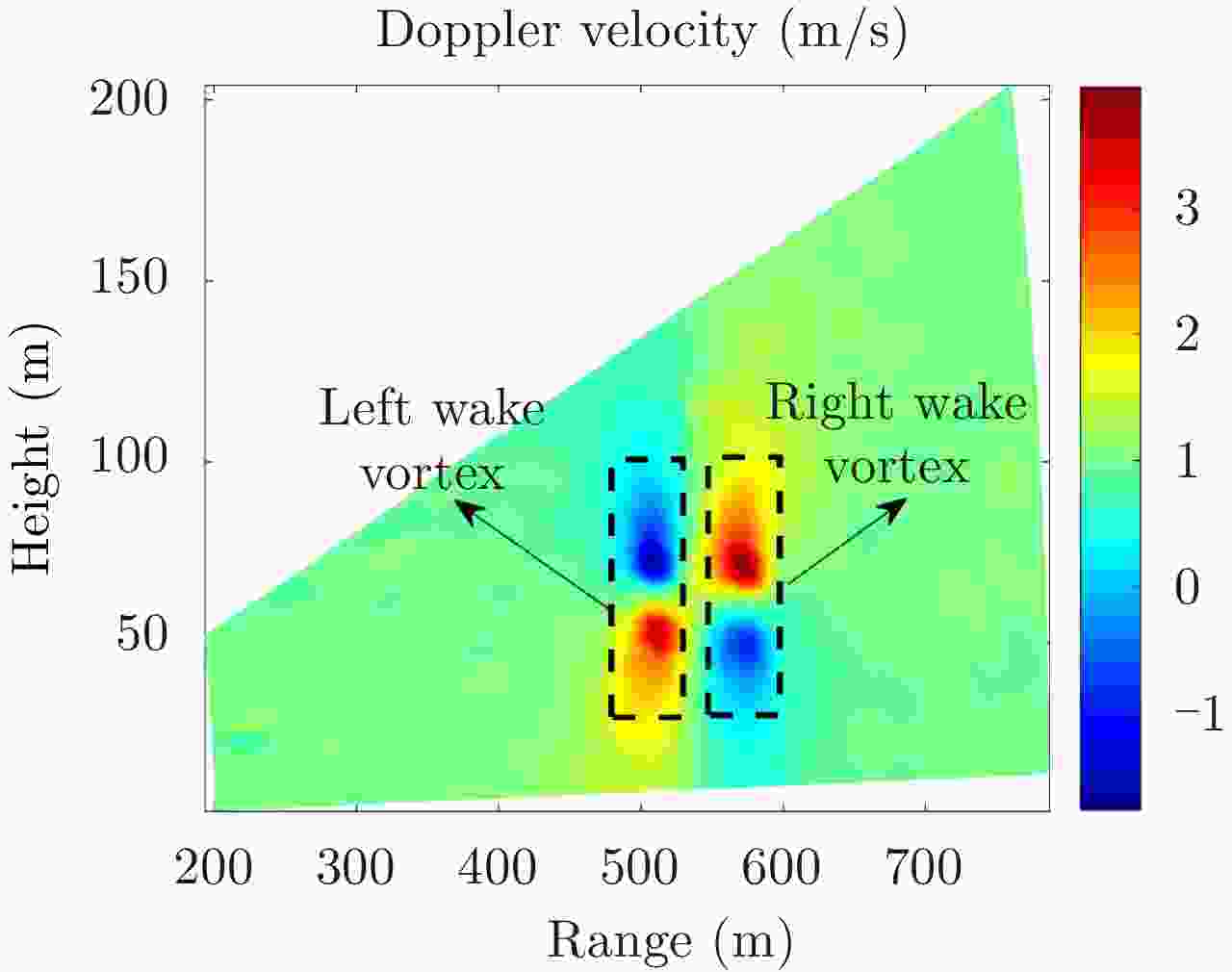
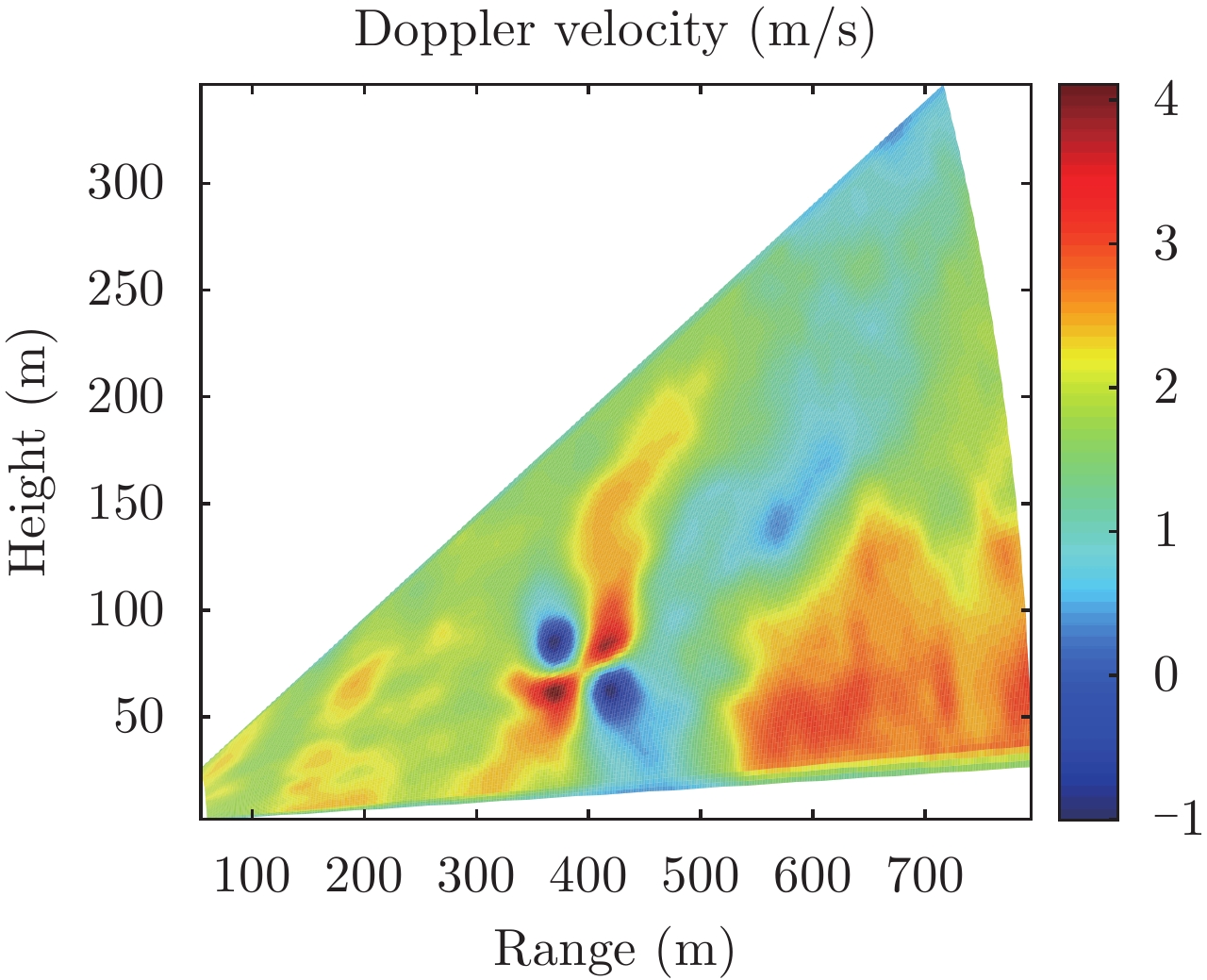
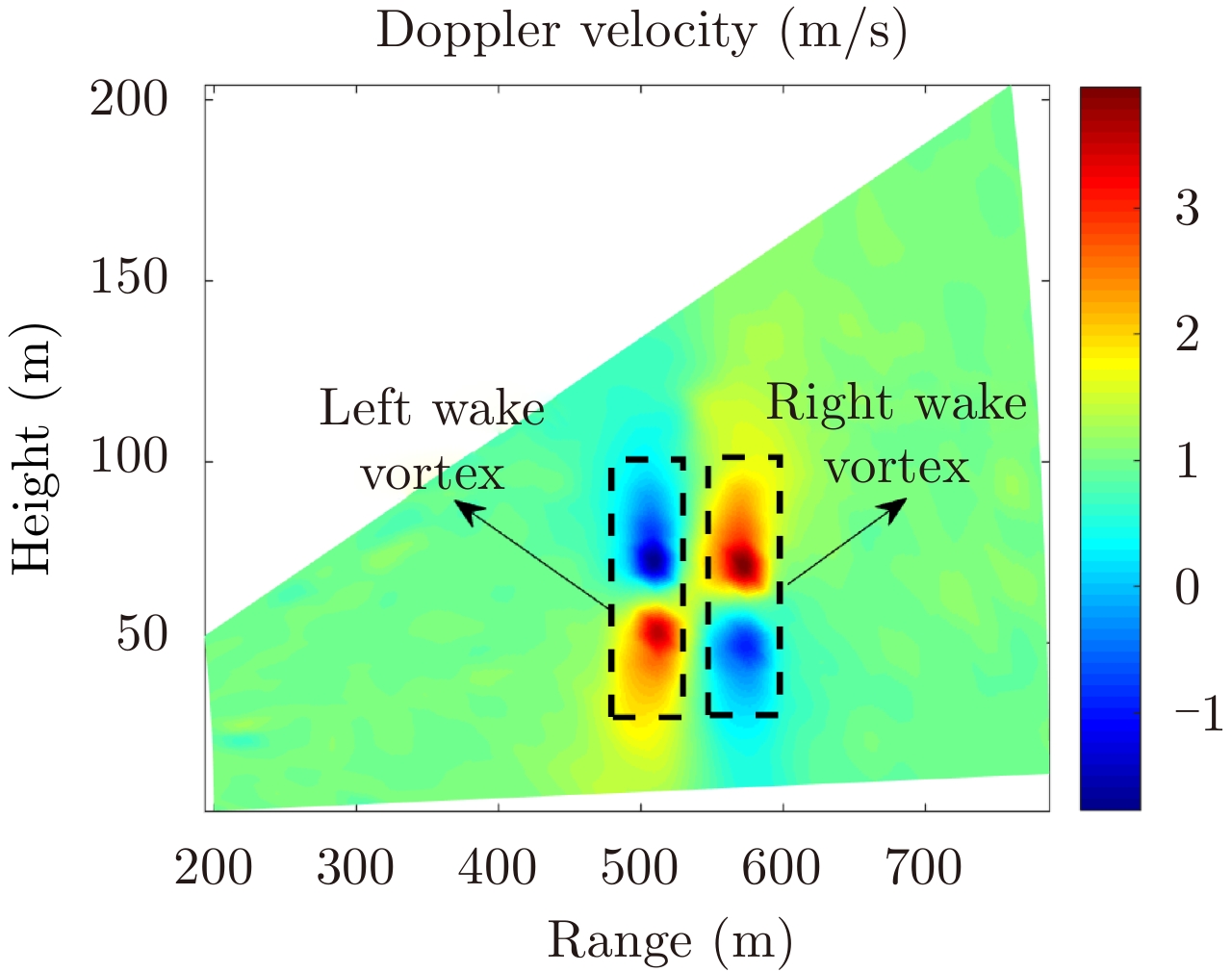
图 5 飞机尾流左右涡心回波数据示意图
Figure 5. Velocity distribution of the left and right wake vortices
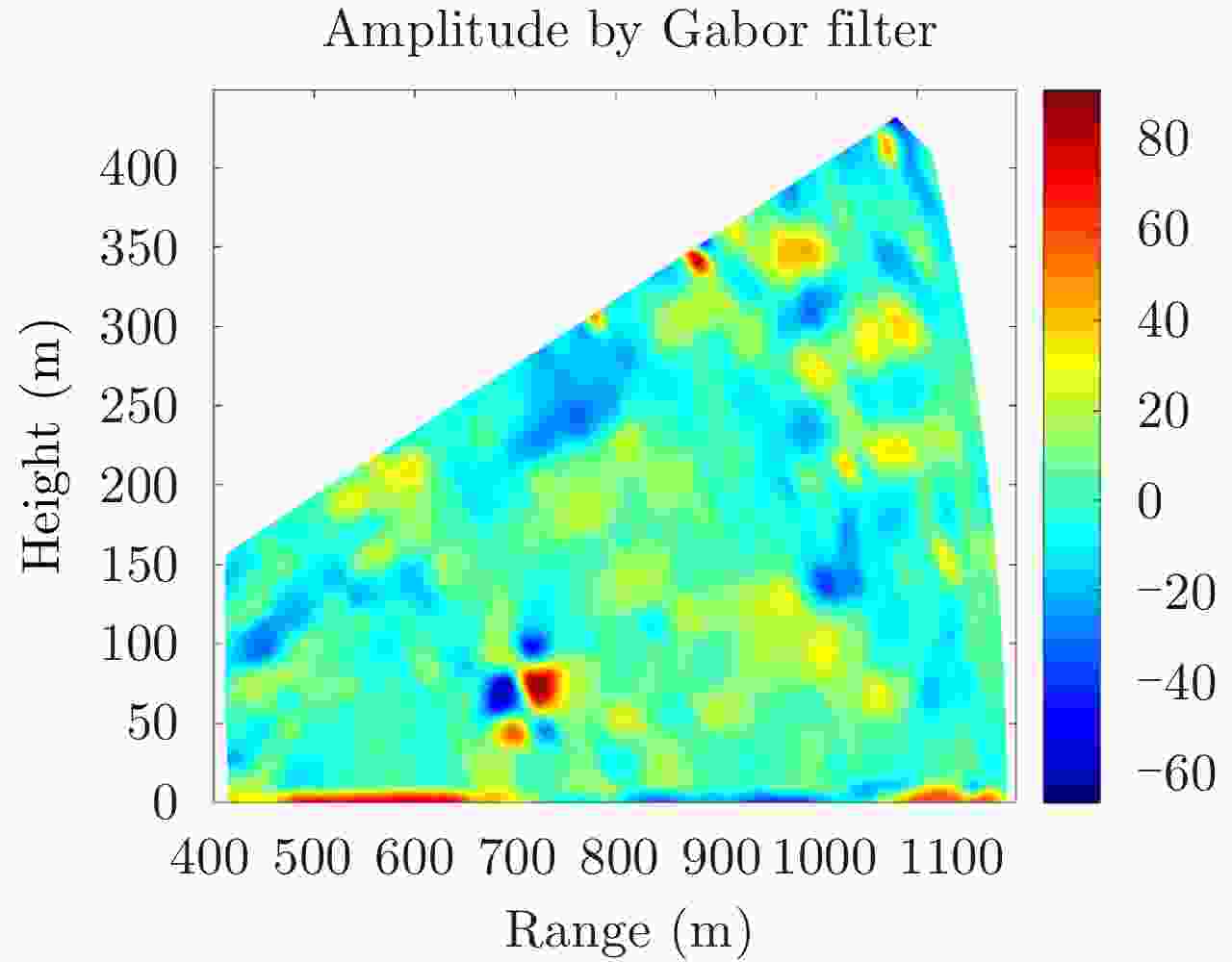
图 6 Gabor滤波后幅度二维分布图
Figure 6. Two-dimensional amplitude distribution after Gabor filter

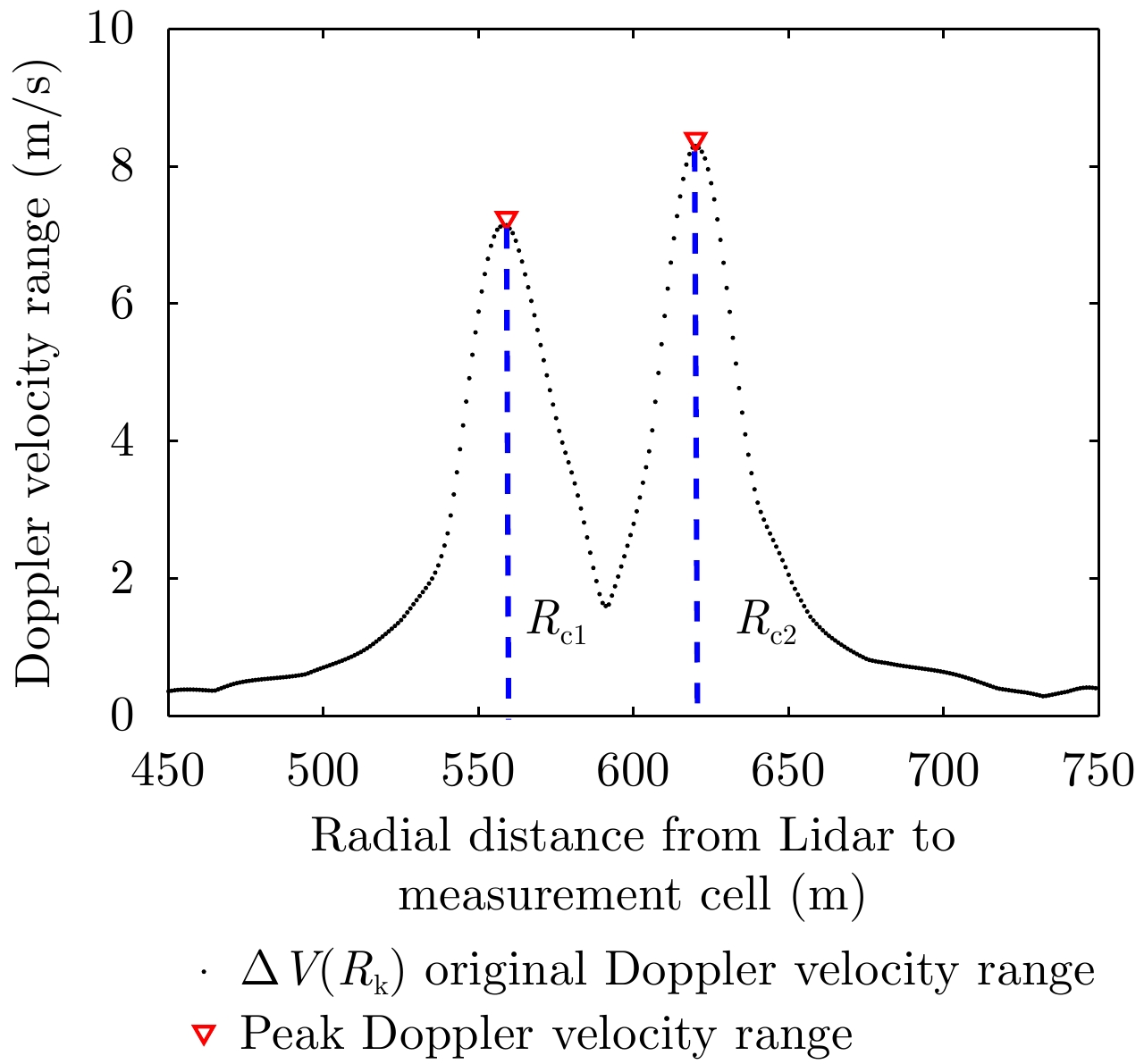
图 7 多普勒速度极差随径向距离的变化
Figure 7. Variation of Doppler velocity range along radial distance
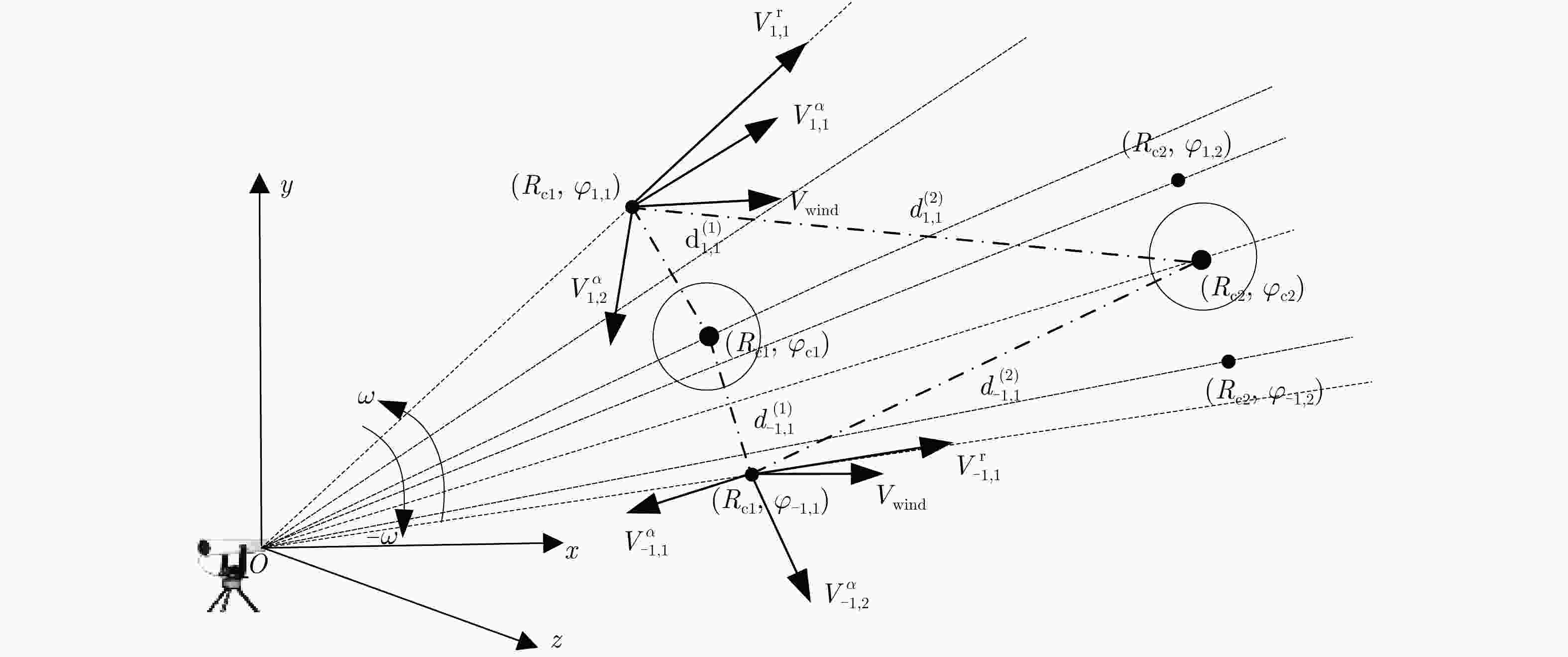
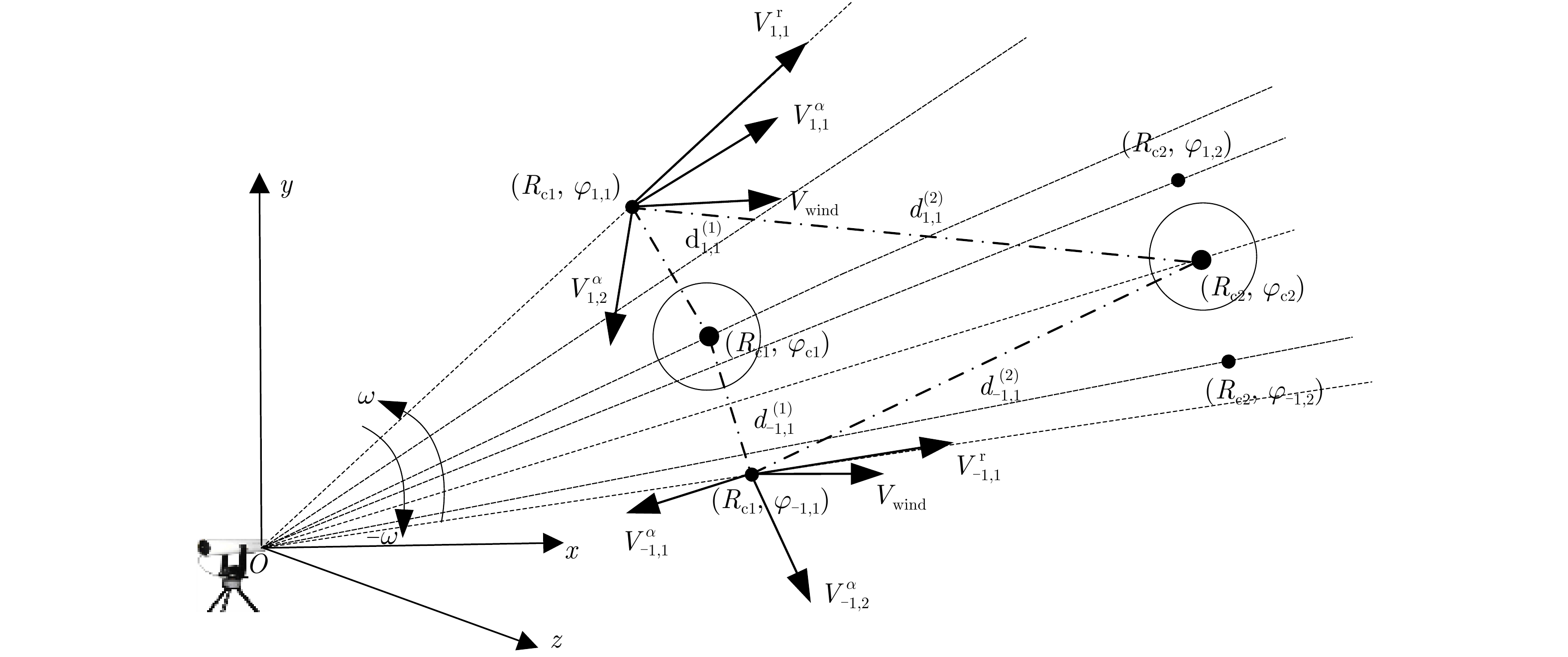
图 10 左涡心径向距离上的两个探测单元速度分解
Figure 10. Velocity analysis of two detection units above and below the left vortex core
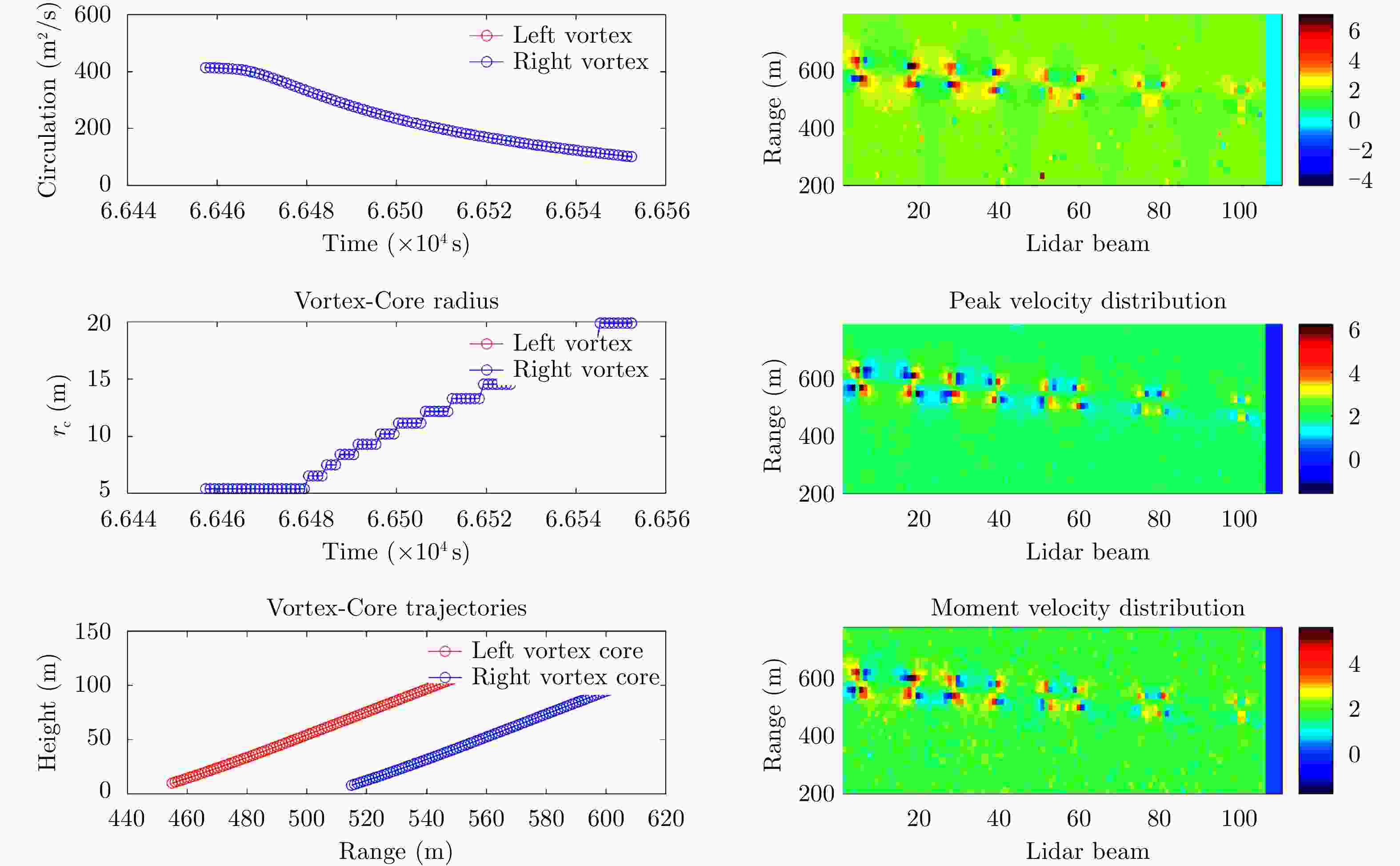
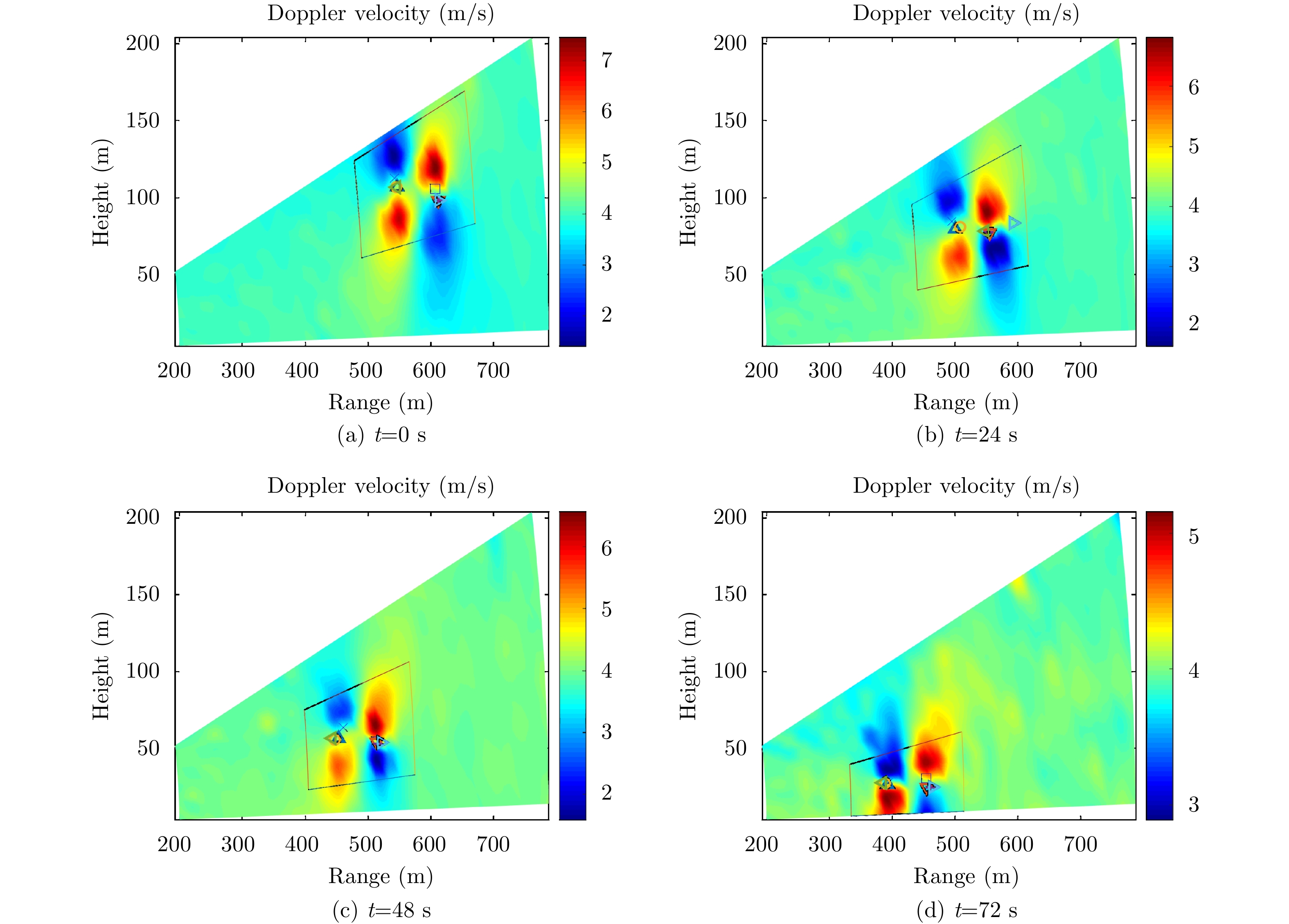
图 13 飞机尾流多普勒速度和涡心轨迹的时间演化
Figure 13. Evolution of wake vortex Doppler velocity and vortex-core trajectory
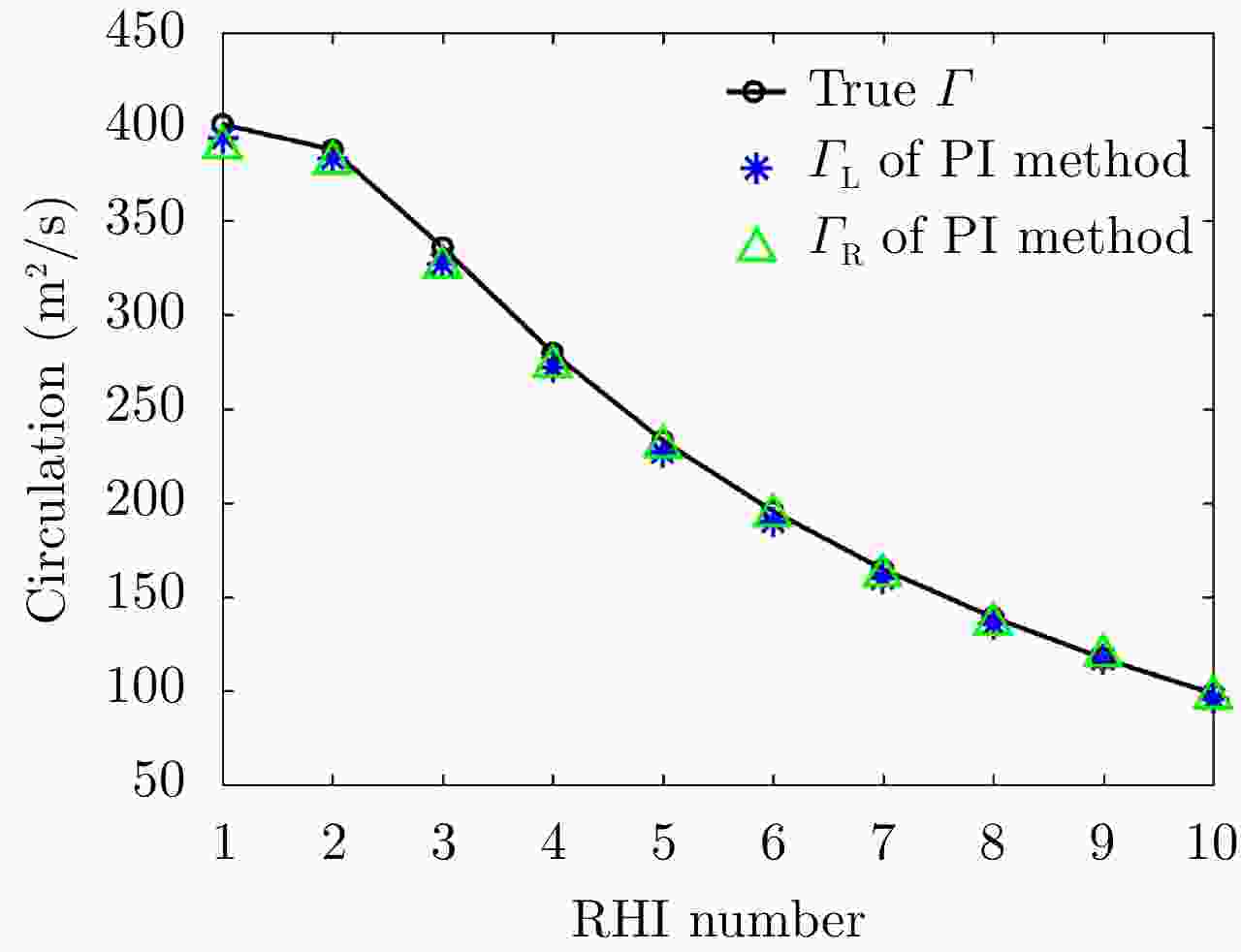
图 15 飞机尾流速度环量的理论与估计值对比
Figure 15. Comparison of wake vortex theory and estimated circulation
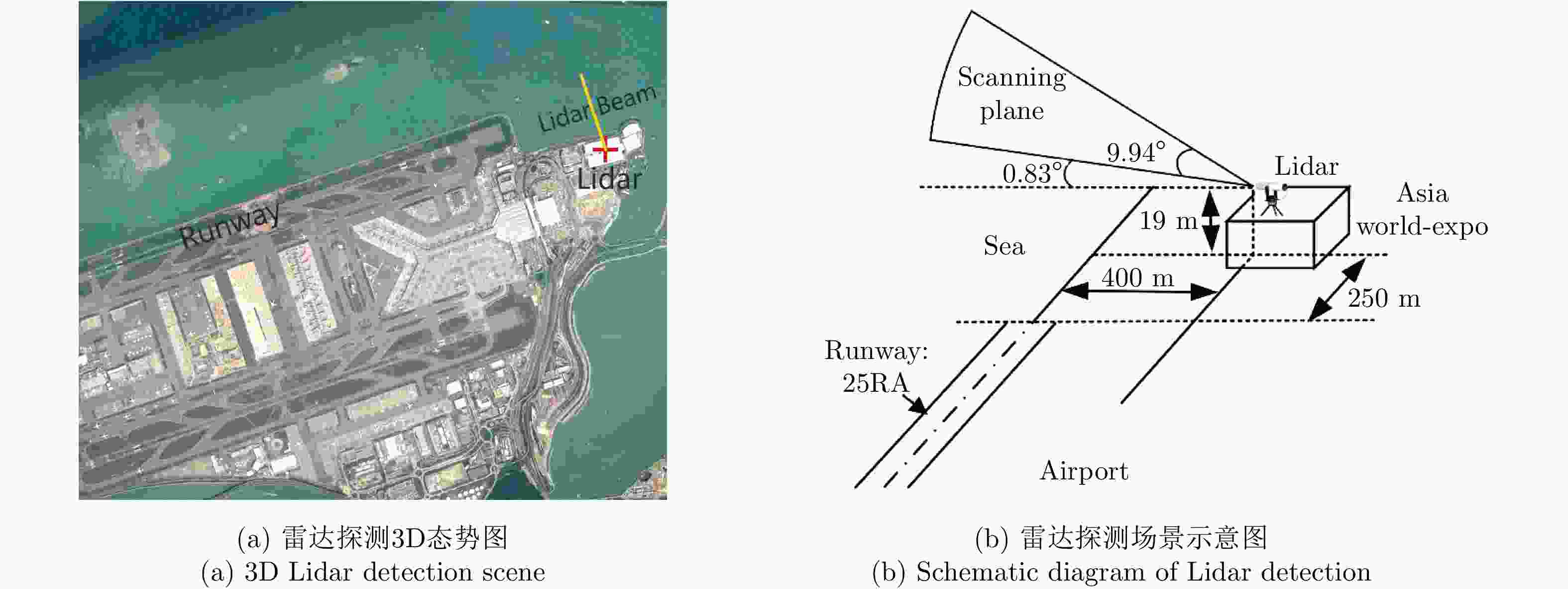
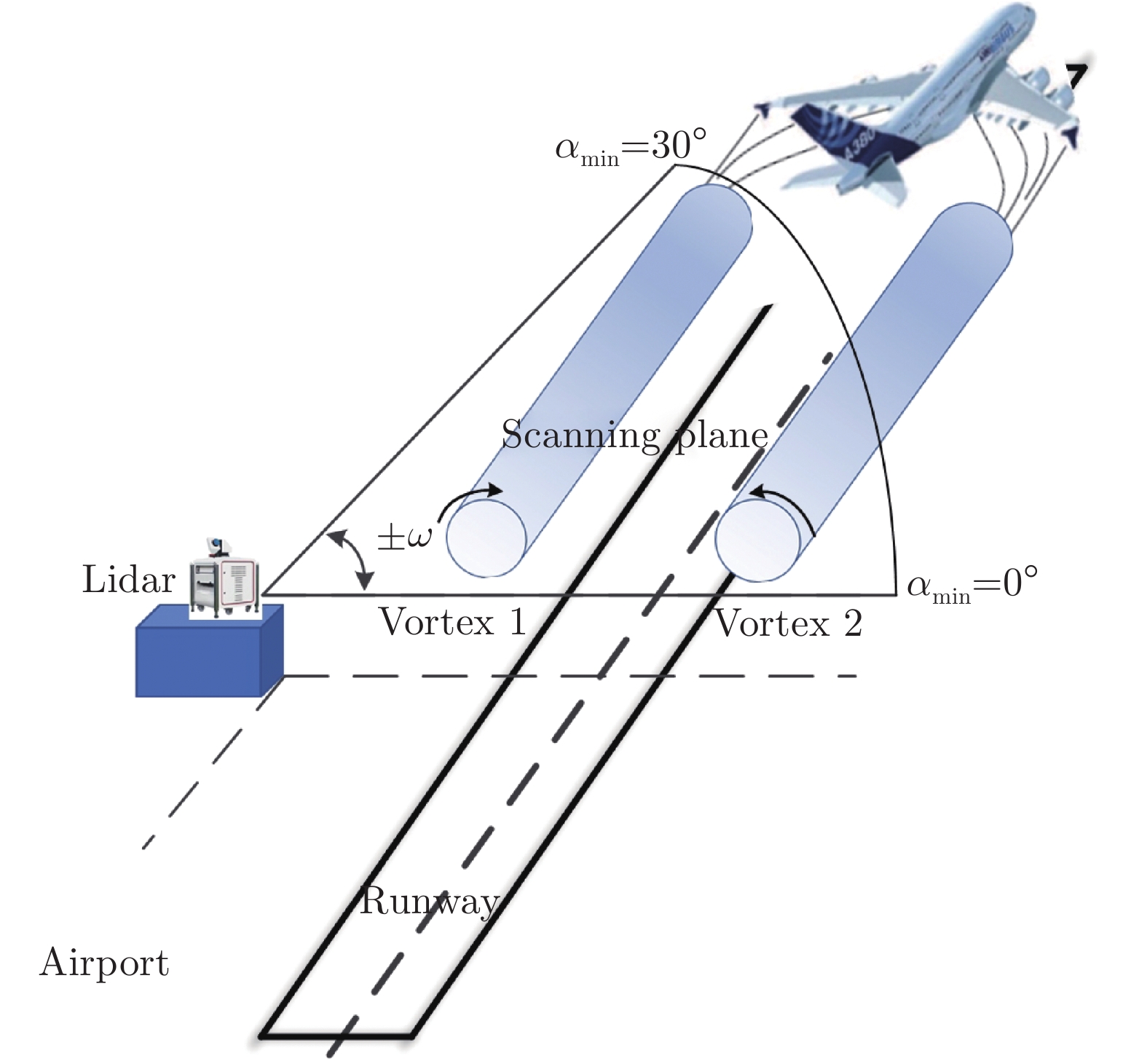
图 16 香港机场飞机尾流激光雷达探测示意图
Figure 16. Lidar detection scene at Hongkong international airport

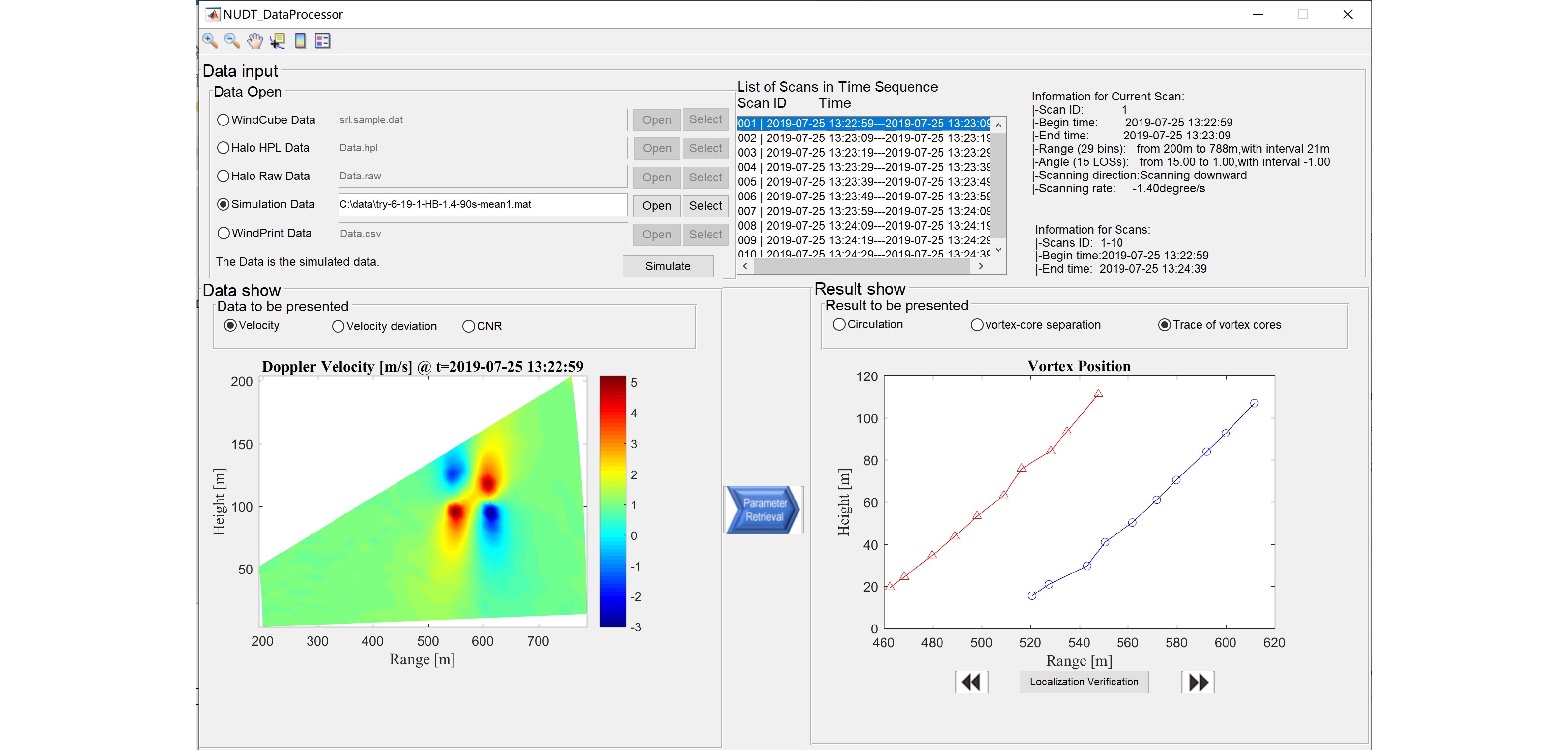
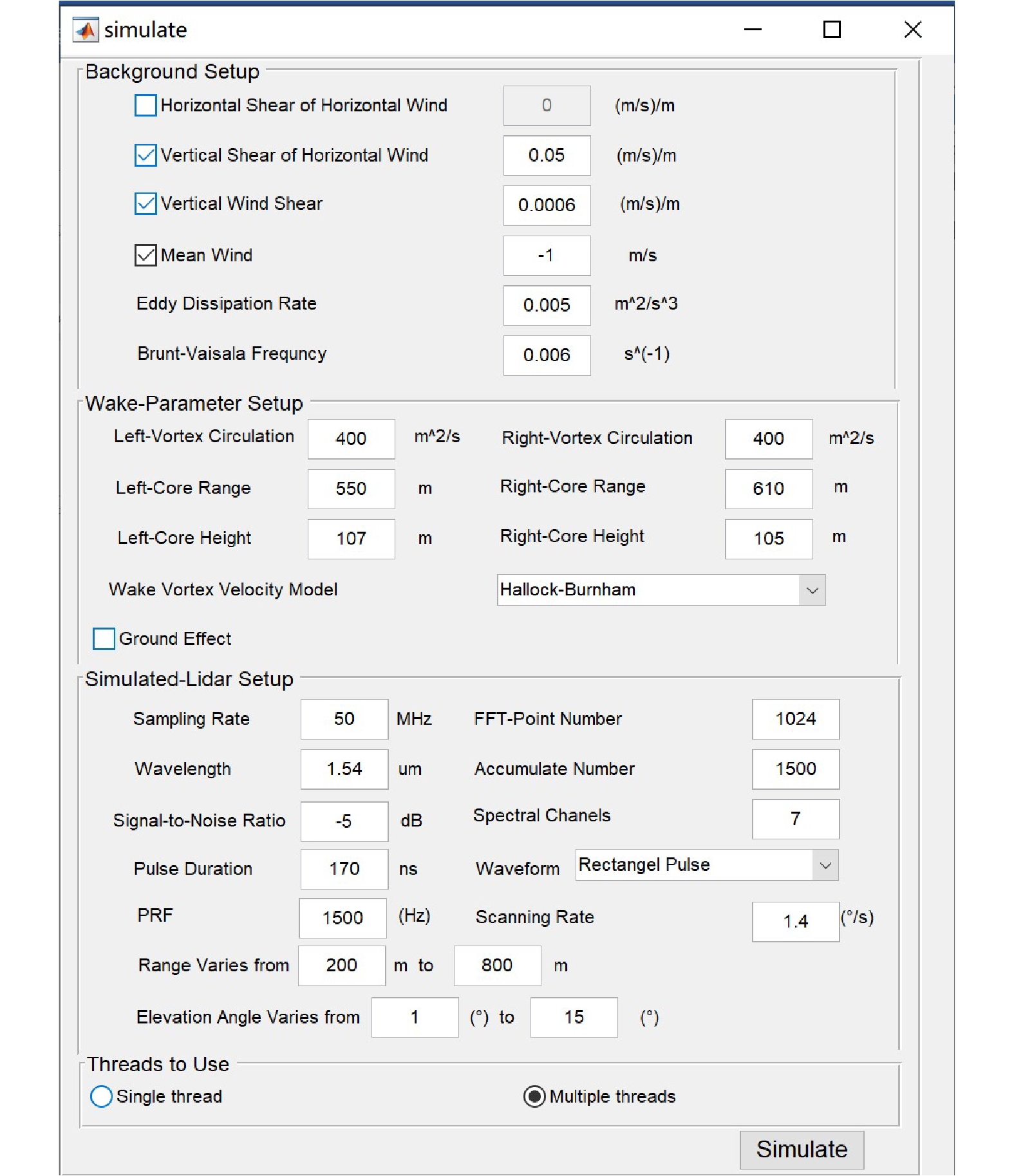
图 17 飞机尾流速度环量估计方法设置
Figure 17. Interface of wake vortex circulation estimation algorithm
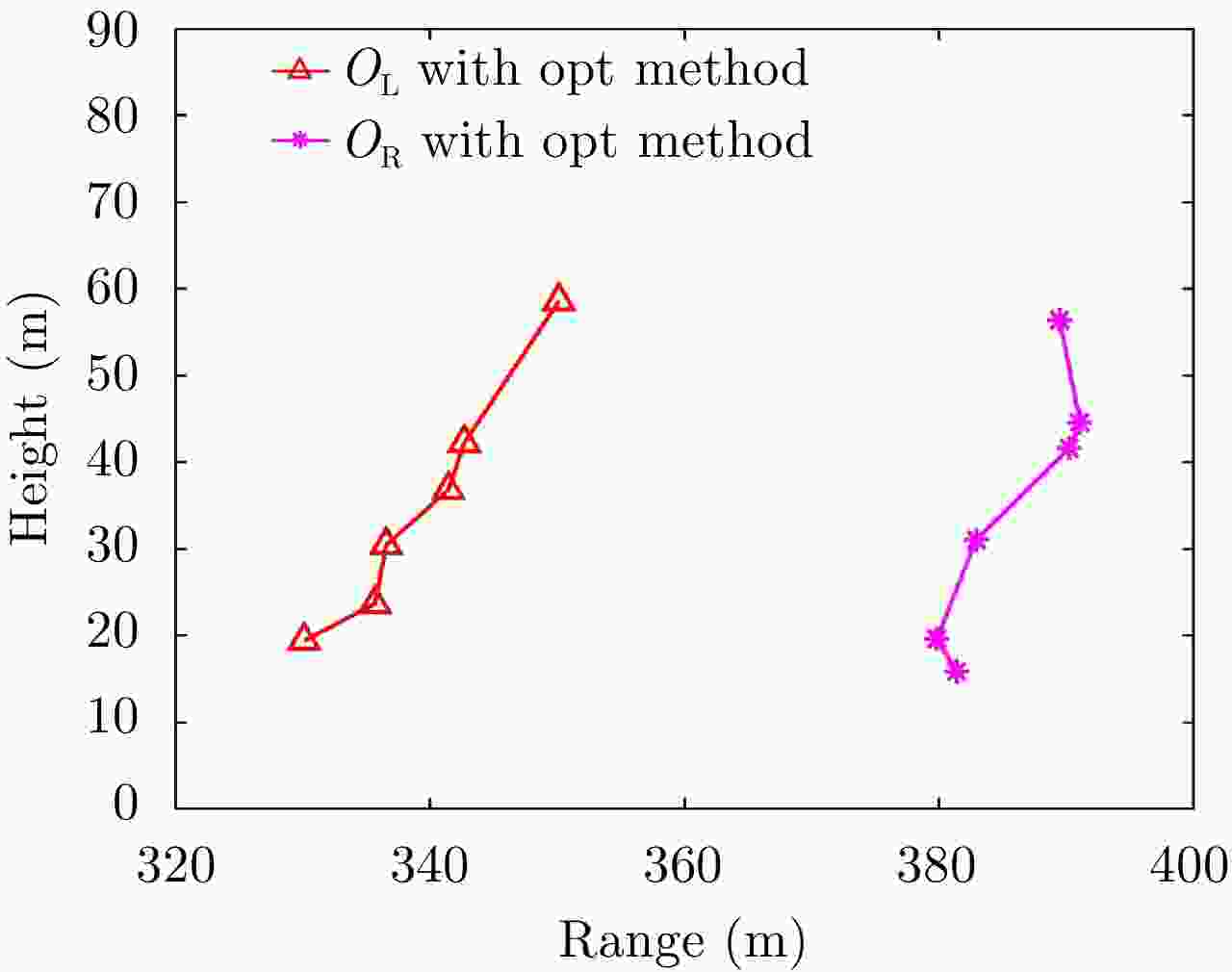
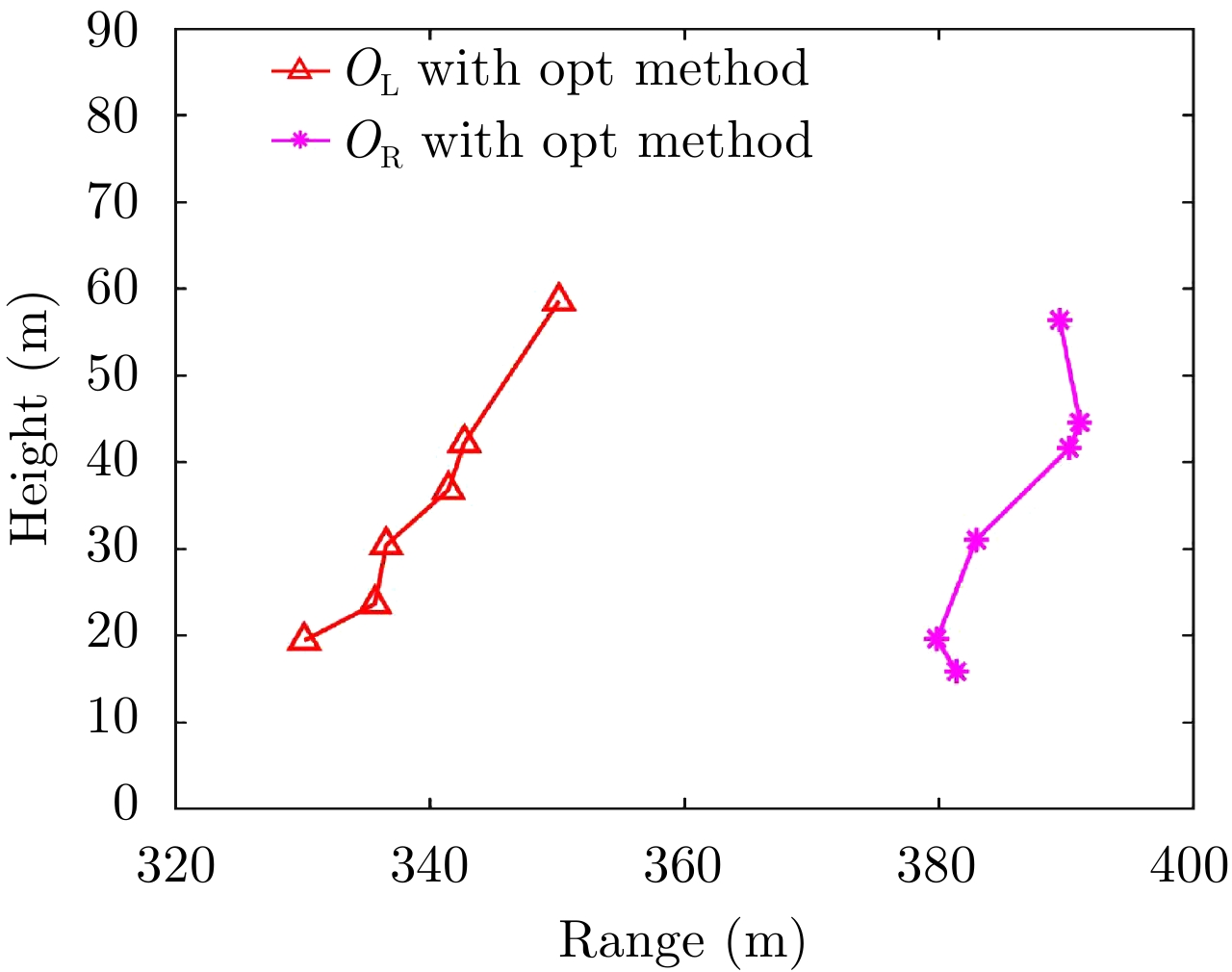
图 18 飞机尾流实测数据涡心位置演化
Figure 18. Retrieval results of wake vortex core trajectory from detected data
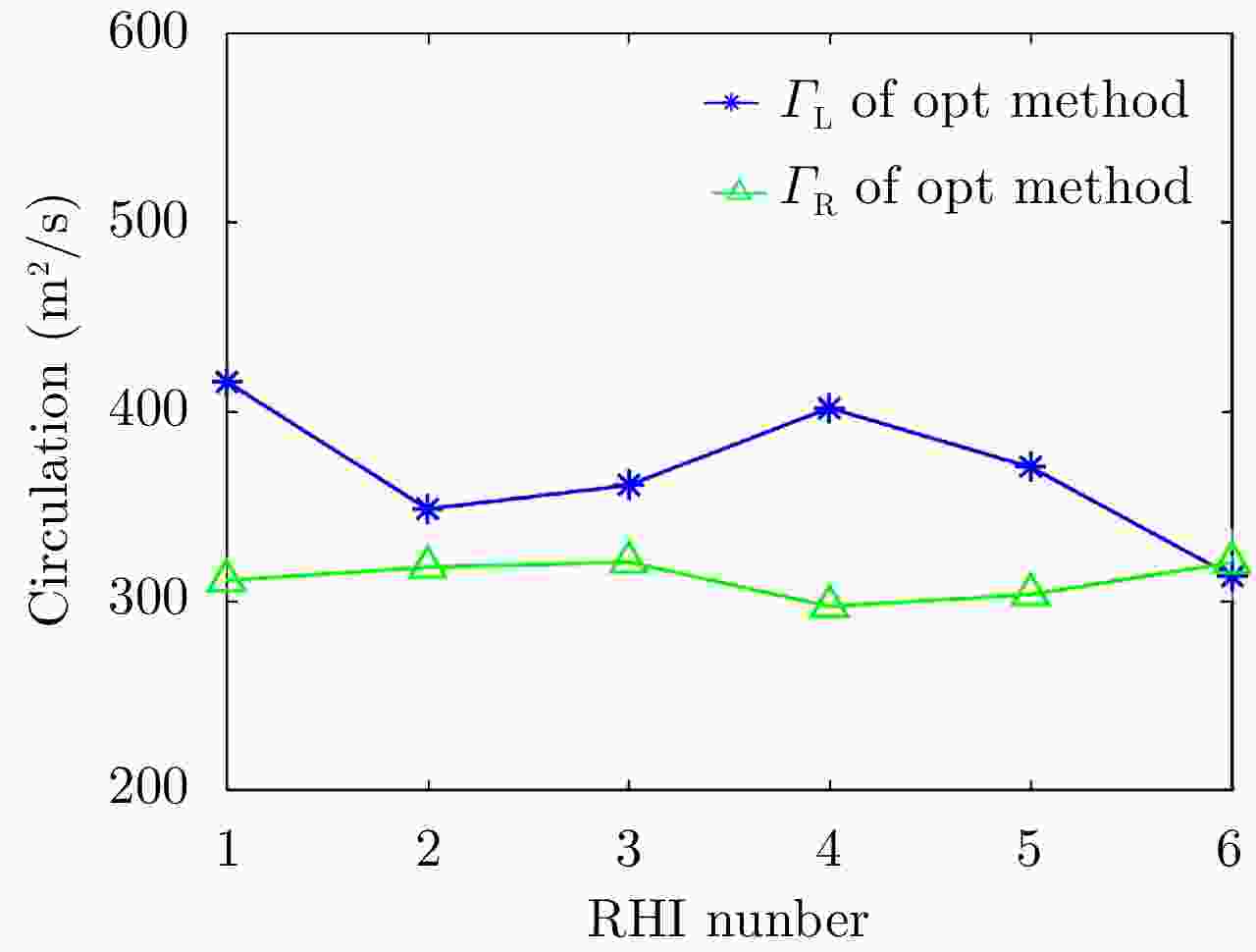
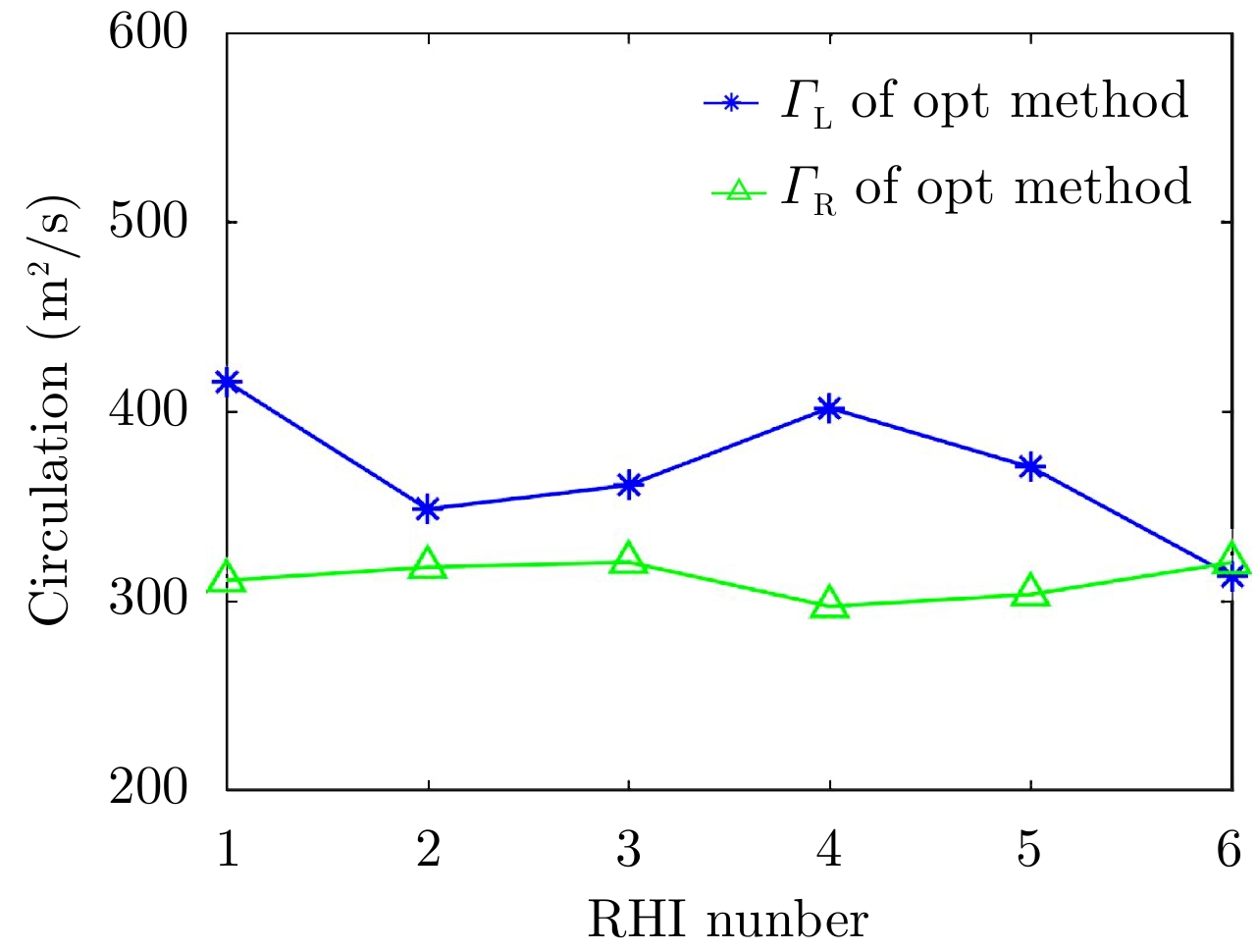
图 19 飞机尾流实测数据速度环量估计
Figure 19. Retrieval results of wake vortex circulations from detected data
表 1 激光雷达仿真参数
Table 1. Simulation parameters of the Lidar
主要参数 量值 雷达波长(μm) 1.54 脉冲宽度(ns) 170 采样率(MHz) 50 脉冲积累数 1500 信号噪声比(dB) –5 FFT点数 1024 距离门宽度(m) 21  下载: 导出CSV
下载: 导出CSV
表 2 香港国际机场探测激光雷达参数
Table 2. Parameters of Lidar used to detect at Hongkong international airport
主要参数 量值 雷达波长(μm) 1.54 脉冲宽度(ns) 200 脉冲重复频率(kHz) 20 探测距离(m) [50, 6000] 俯仰角(°) 0.83~10.77 距离门宽度(m) 25
下载: 导出CSV
-
[1] ROSSOW V J. Lift-generated vortex wakes of subsonic transport aircraft[J]. Progress in Aerospace Sciences, 1999, 35(6): 507–660. doi: 10.1016/S0376-0421(99)00006-8 [2] VEILLETTE P R. Data show that U. S. wake-turbulence accidents are most frequent at low altitude and during approach and landing[J]. Flight Safety Digest, 2002, 21(3/4): 147. [3] ANDREWS W H, LARSON R R, and ROBINSON G H. Aircraft response to the wing trailing vortices generated by large jet transports[R]. SEE N71-30756 18-02, 1971: 115–126. [4] ASTHEIMER T, HILTON D, BALDONI C, et al. SESAR master plan[R]. DLM-0710-001-02-00, 2008. [5] Federal Aviation Administration. NextGen implementation plan 2016[R]. FAA, 2016. [6] HOLZÄPFEL F, GERZ T, KÖPP F, et al. Strategies for circulation evaluation of aircraft wake vortices measured by lidar[J]. Journal of Atmospheric and Oceanic Technology, 2003, 20(8): 1183–1195. doi: 10.1175/1520-0426(2003)020<1183:SFCEOA>2.0.CO;2 [7] SMALIKHO I N, BANAKH V A, HOLZÄPFEL F, et al. Method of radial velocities for the estimation of aircraft wake vortex parameters from data measured by coherent Doppler lidar[J]. Optics Express, 2015, 23(19): A1194–A1207. doi: 10.1364/OE.23.0A1194 [8] THOBOIS L P, KRISHNAMURTY R, CARIOU J P, et al. Wind and EDR measurements with scanning Doppler LIDARs for preparing future weather dependent separation concepts[C]. The 7th AIAA Atmospheric and Space Environments Conference, Dallas, USA, 2015: 1–13. doi: 10.2514/6.2015-3317. [9] YOSHIKAWA E and MATAYOSHI N. Aircraft wake vortex retrieval method on lidar lateral range–Height Indicator Observation[J]. AIAA Journal, 2017, 55(7): 2269–2278. doi: 10.2514/1.J055224 [10] LI Jianbing, WANG Xuesong, and WANG Tao. Modeling the dielectric constant distribution of wake vortices[J]. IEEE Transactions on Aerospace and Electronic Systems, 2011, 47(2): 820–831. doi: 10.1109/TAES.2011.5751228 [11] LIU Zhongxun, JEANNIN N, VINCENT F, et al. Modeling the radar signature of raindrops in aircraft wake vortices[J]. Journal of Atmospheric and Oceanic Technology, 2013, 30(3): 470–484. doi: 10.1175/JTECH-D-11-00220.1 [12] LI J, WANG X, and WANG T. On the validity of Born approximation[J]. Progress in Electromagnetics Research, 2010, 107: 219–237. doi: 10.2528/PIER10070504 [13] LI Jianbing, WANG Xuesong, and WANG Tao. A universal solution to one-dimensional oscillatory integrals[J]. Science in China Series F: Information Sciences, 2008, 51(10): 1614–1622. doi: 10.1007/s11432-008-0121-2 [14] LI Jianbing, WANG Xuesong, XIAO Shunping, et al. A rapid solution of a kind of 1D fredholm oscillatory integral equation[J]. Journal of Computational and Applied Mathematics, 2012, 236(10): 2696–2705. doi: 10.1016/j.cam.2012.01.007 [15] LI Jianbing, WANG Xuesong, WANG Tao, et al. On an improved-Levin oscillatory quadrature method[J]. Journal of Mathematical Analysis and Applications, 2011, 380(2): 467–474. doi: 10.1016/j.jmaa.2011.03.055 [16] Li Jianbing, WANG Xuesong, WANG Tao, et al. Delaminating quadrature method for multi-dimensional highly oscillatory integrals[J]. Applied Mathematics and Computation, 2009, 209(2): 327–338. doi: 10.1016/j.amc.2008.12.061 [17] LI Jianbing, WANG Xuesong, WANG Tao, et al. An improved levin quadrature method for highly oscillatory integrals[J]. Applied Numerical Mathematics, 2010, 60(8): 833–842. doi: 10.1016/j.apnum.2010.04.009 [18] 李健兵, 王雪松. 飞机尾流雷达特征信号研究[M]. 长沙: 国防科技大学出版社, 2015.LI Jianbing and WANG Xuesong. Study on the Radar Characteristics of Aircraft Wake Vortices[M]. Changsha: National University of Defense Technology Press, 2015. [19] LI Jianbing, WANG Xuesong, WANG Tao, et al. High range resolution profile of simulated aircraft wake vortices[J]. IEEE Transactions on Aerospace and Electronic Systems, 2012, 48(1): 116–129. doi: 10.1109/TAES.2012.6129624 [20] WANG Xuesong, LI Jianbing, QU Longhai, et al. Temporal evolution of the RCS of aircraft wake vortices[J]. Aerospace Science and Technology, 2013, 24(1): 204–208. doi: 10.1016/j.ast.2011.11.008 [21] LI Jianbing, WANG Tao, LIU Zhongxun, et al. Circulation retrieval of wake vortex in fog with a side-looking scanning Radar[J]. IEEE Transactions on Aerospace and Electronic Systems, 2016, 52(5): 2242–2254. doi: 10.1109/TAES.2016.150635 [22] JIAO Yuntao. Windshear at low altitude and flight safety[J]. Civil Aviation Economics and technology, 1994, (11): 13–14. [23] WILSON D K, OSTASHEV V E, GOEDECKE G H, et al. Quasi-Wavelet Calculations of Sound Scattering Behind Barriers[J]. Applied Acoustics, 2004, 65(6): 605–627. doi: 10.1016/j.apacoust.2003.11.009 [24] 张宏昇. 大气湍流基础[M]. 北京: 北京大学出版社, 2014: 161–165.ZHANG Hongsheng. Atmospheric Turbulence Foundation[M]. Beijing: Peking University Press, 2014: 161–165. [25] GERZ T, HOLZÄPFEL F, and DARRACQ D. Commercial aircraft wake vortices[J]. Progress in Aerospace Sciences, 2002, 38(3): 181–208. doi: 10.1016/S0376-0421(02)00004-0 [26] 屈龙海. 晴空和湿性大气中飞机尾流雷达散射特性的研究[D]. [博士论文], 国防科学技术大学, 2015: 29–31.QU Longhai. Study on the radar scattering characteristics of aircraft wake vortex in clear air and moist air[D]. [Ph. D. dissertation], National University of Defense Technology, 2015: 29–31. [27] AHMAD N N, PROCTOR F H, LIMON DUPARCMEUR F M, et al. Review of idealized aircraft wake vortex models[C]. The 52nd Aerospace Sciences Meeting, National Harbor, USA, 2014. [28] HOLZÄPFEL F. Sensitivity analysis of the effects of aircraft and environmental parameters on aircraft wake vortex trajectories and lifetimes[C]. The 51st AIAA Aerospace Sciences Meeting including the New Horizons Forum and Aerospace Exposition, Dallas/Ft. Worth Region, USA, 2013: 7–10. [29] HOLZÄPFEL F. Probabilistic two-phase wake vortex decay and transport model[J]. Journal of Aircraft, 2003, 40(2): 323–331. doi: 10.2514/2.3096 [30] 李金梁. 箔条干扰的特性与雷达抗箔条技术研究[D]. [博士论文], 国防科学技术大学, 2010: 57–58.LI Jingliang. Study on characteristics of chaff jamming and anti - chaff technology for radar[D]. [Ph. D. dissertation], National University of Defense Technology, 2010: 57–58. [31] ZRNIC D S. Estimation of spectral moments for weather echoes[J]. IEEE Transactions on Geoscience Electronics, 1979, 17(4): 113–128. doi: 10.1109/TGE.1979.294638 [32] DAUGMAN J G. Uncertainty relation for resolution in space, spatial frequency, and orientation optimized by two-dimensional visual cortical filters[J]. Journal of the Optical Society of America A, 1985, 2(7): 1160–1169. doi: 10.1364/JOSAA.2.001160 [33] LI Jianbing, SHEN Chun, GAO Hang, et al. Path Integration (PI) method for the parameter-retrieval of aircraft wake vortex by Lidar[J]. Optics Express, 2020, 28(3): 4286–4306. doi: 10.1364/OE.382968 [34] GAO Hang, LI Jianbing, CHAN P W, et al. Parameter-retrieval of dry-air wake vortices with a scanning Doppler lidar[J]. Optics Express, 2018, 26(13): 16377–16392. doi: 10.1364/OE.26.016377 [35] GAO Hang, LI Jianbing, CHAN P W, et al. Parameter retrieval of aircraft wake vortex based on its max-min distribution of Doppler velocities measured by a lidar[J]. The Journal of Engineering, 2019, 2019(20): 6852–6855. doi: 10.1049/joe.2019.0539 -









计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

