
 作者中心
作者中心 专家审稿
专家审稿 责编办公
责编办公 编辑办公
编辑办公
Resource Allocation and Precise Tracking Algorithm for Multiple Maneuvering Targets
-
摘要: 雷达系统在对多机动目标进行跟踪时,跟踪性能会因为多雷达发射资源的非匹配预设和先验信息的不充分利用而下降。针对该问题,提出了一种面向多机动目标的资源分配与精细化跟踪算法,以期在同等资源消耗条件下获取更高的目标跟踪性能。首先,该文结合跟踪器反馈的目标预测信息,利用多模型交互的思想对目标预测位置分布函数进行拟合,建立了基于多模型交互的检测跟踪一体化方法,实现了系统对机动目标的精细化跟踪。而后,分析了多雷达发射资源和机动目标跟踪性能的耦合机理,结合机动目标贝叶斯克拉美罗下界的推导,建立了跟踪性能驱动的多模型加权资源分配框架。最后通过仿真验证了所提方法在相同资源消耗条件下,能够显著提升多机动目标的综合跟踪精度。Abstract: In radar systems that track multiple maneuvering targets, conventional approaches often suffer from performance degradation due to suboptimal resource allocation and insufficient utilization of prior information. To address this challenge and significantly enhance tracking performance under equivalent resource constraints, a resource allocation and precise tracking algorithm for multiple maneuvering targets is proposed. First, by integrating a multiple model interaction architecture with tracker feedback prediction, a probabilistic distribution model for target position prediction through multiple model interaction is constructed. This model establishes an integrated detection and tracking method based on multiple model interactions to achieve precise tracking of maneuvering targets. Subsequently, by analytically modeling the coupling mechanism between radar resources and tracking performance, and deriving the Bayesian Cramér-Rao Lower Bound (BCRLB) for maneuvering targets, a performance-driven multimodel weighted resource allocation framework is developed. Simulations validate that the proposed method can significantly enhance the overall tracking precision of multiple maneuvering targets under equivalent resource consumption.
-
Key words:
- Maneuvering target /
- Resource allocation /
- Precise tracking /
- Prior information /
- Multiple model
-
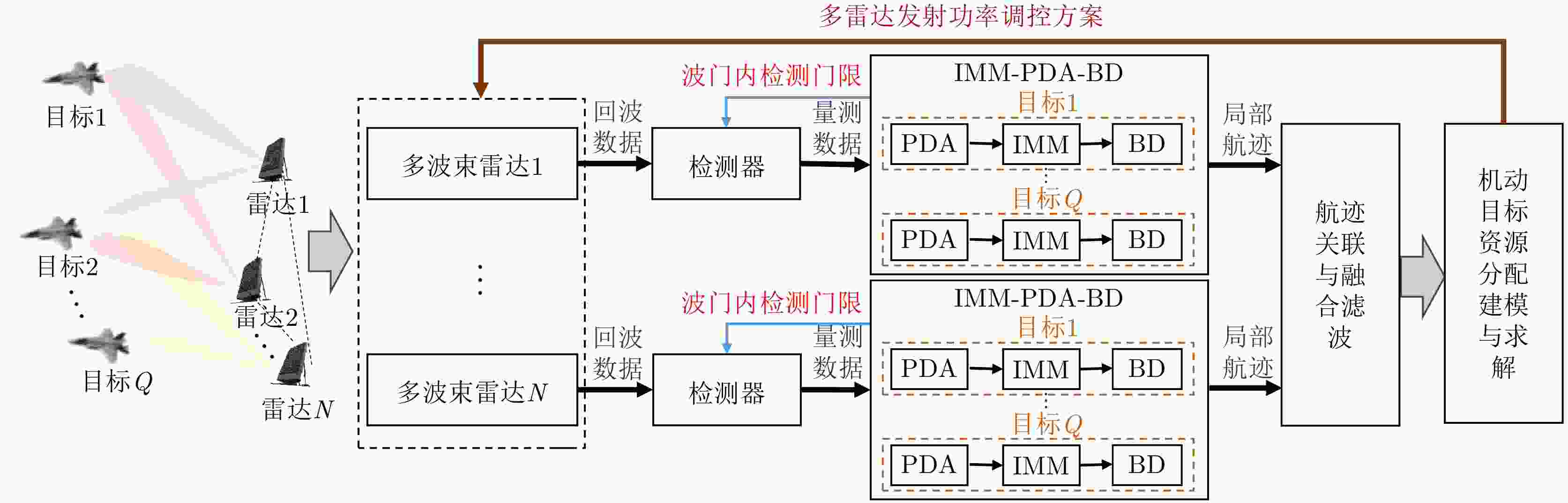
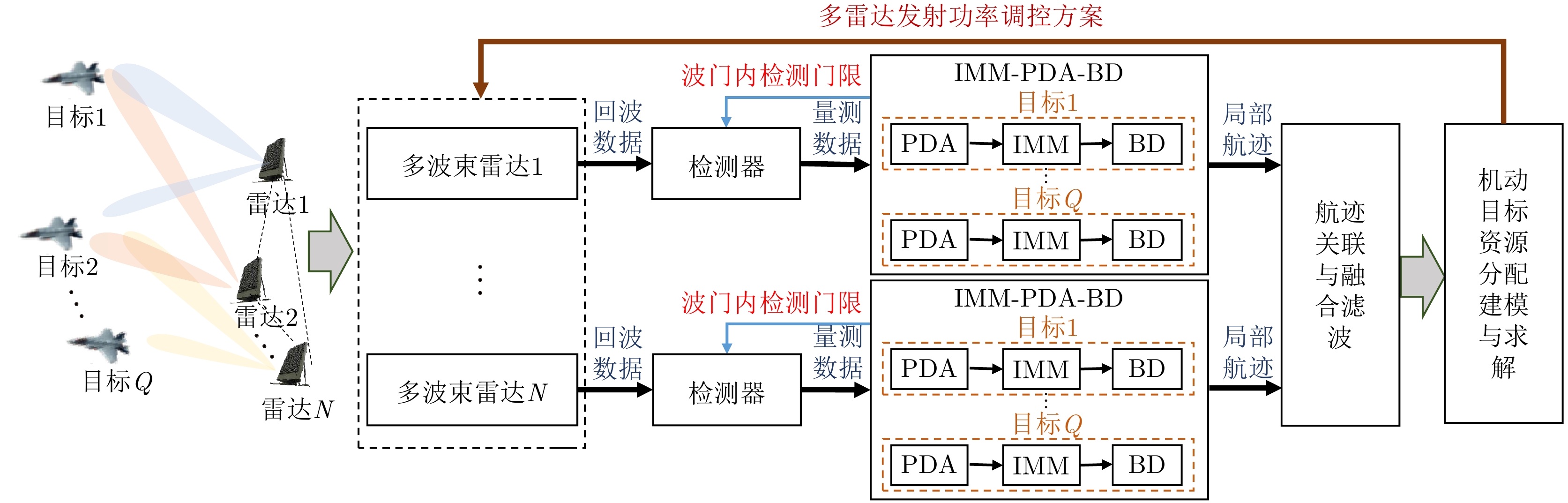
图 1 面向机动目标跟踪的资源分配与精细化目标跟踪处理框架
Figure 1. The processing framework of resource allocation and precise target tracking for maneuvering target tracking
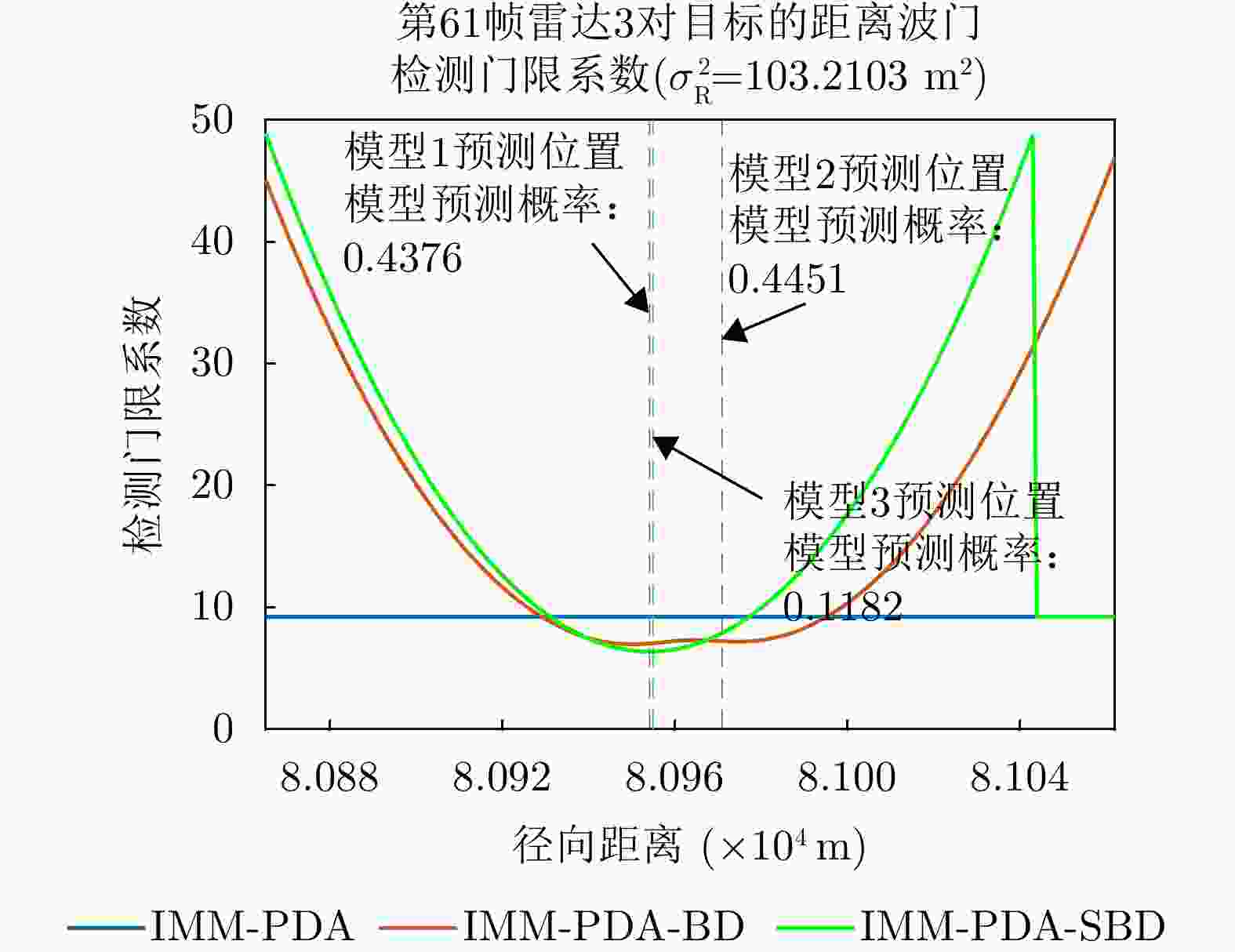
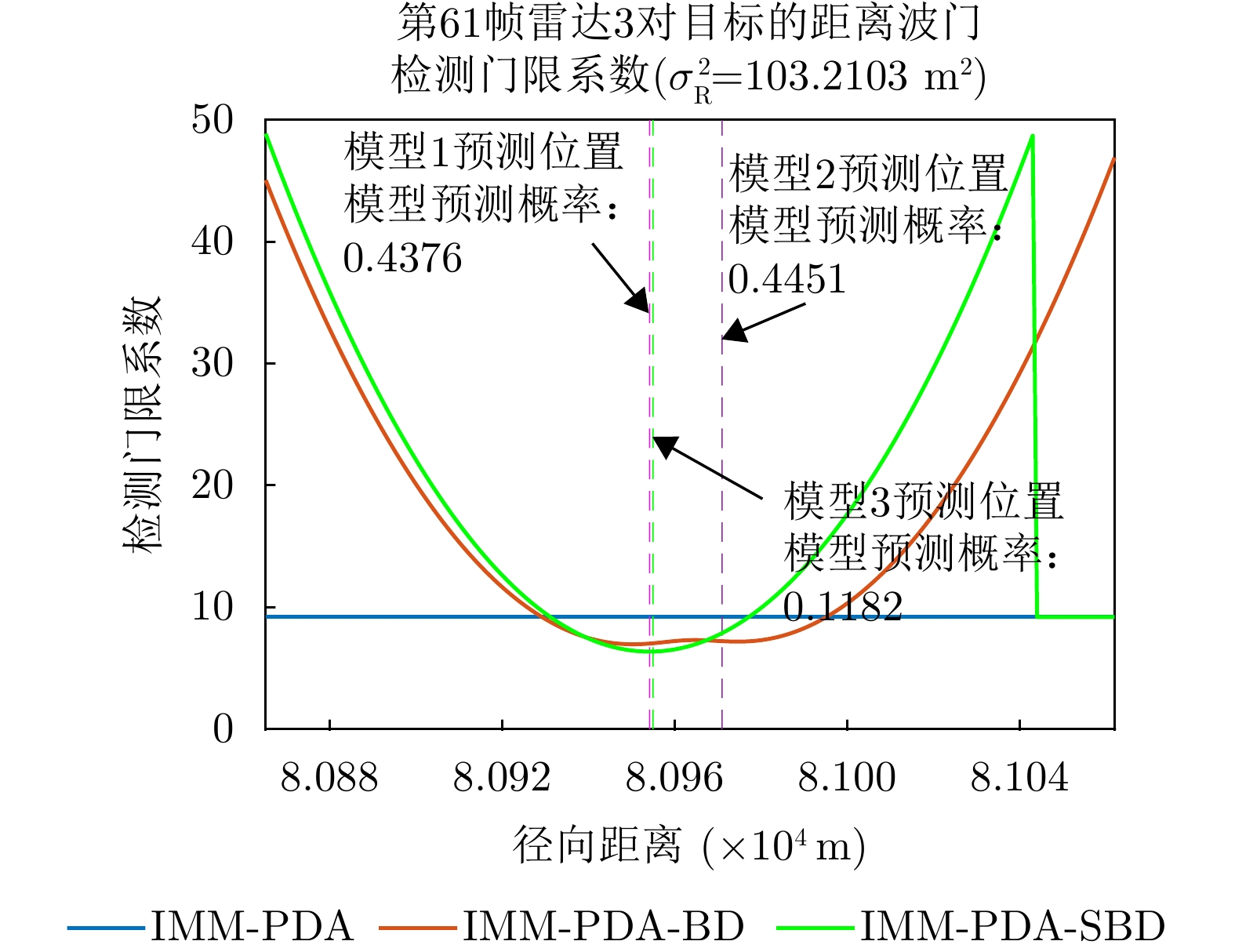
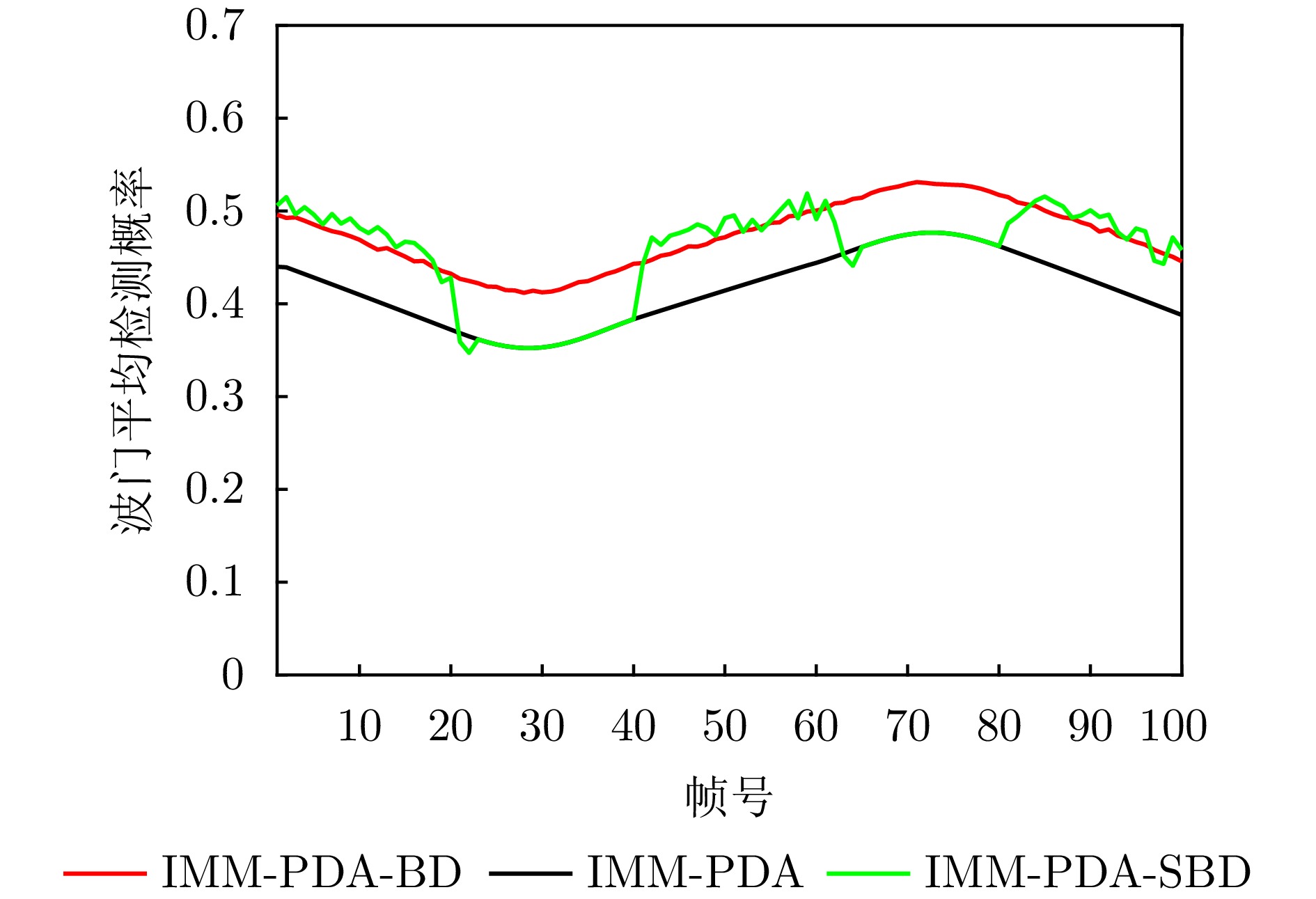
图 7 雷达对目标距离波门检测门限系数曲线
Figure 7. Threshold coefficient of radar range gate detection for the target
1 基于内点法的雷达发射功率优化算法
1. The optimization algorithm based on interior point method
输入:内点可行域$D = \left\{ {{p_{i,q,k}}\left| {\displaystyle\sum\nolimits_{q = 1}^Q {{p_{i,q,k}}} \le p_{{\mathrm{total}}}^i,{\mathrm{lb}} \le {p_{i,q,k}} \le {\mathrm{ub}},\forall i,q} \right.} \right\}$,设置算法初始点,即
${\boldsymbol{p}}_{q,k}^{} = \left\{ {{p_{i,q,k}}\left| {{p_{i,q,k}} = {{p_{{\mathrm{total}}}^i} \mathord{\left/ {\vphantom {{p_{total}^i} Q}} \right. } Q},\forall i} \right.} \right\}$。设置迭代索引$j = 1$,设置算法终止条件为迭代步长$\varepsilon \le 0.0001$或迭代次数$\varphi \ge 100000$。(1) 构造罚函数优化问题如下 $ \mathop {\min }\limits_{{p_k}} {\text{ }}\displaystyle\sum\limits_{q = 1}^Q {{f_q}({{\boldsymbol{p}}_{q,k}})} + {\varsigma _q}{\varphi _D}({{\boldsymbol{p}}_{q,k}}) $ 其中,$ {\varsigma _q} \gt 0 $为惩罚因子,$ \varphi_{D}\left({\boldsymbol{p}}_{q, k}\right) $为罚函数,当$ {{\boldsymbol{p}}_{q,k}} \in D $时,$ {\varphi _D}({{\boldsymbol{p}}_{q,k}}) = 0 $,否则$ {\varphi _D}({{\boldsymbol{p}}_{q,k}}) = \infty $。 (2) 搜索罚函数优化问题的极小值点$ {\boldsymbol{p}}_{1, k}^{*}, {\boldsymbol{p}}_{2, k}^{*}, \cdots ,{\boldsymbol{p}}_{Q, k}^{*} $。 (3) 检验终止条件,并计算当前极小值点对应目标函数值,若符合终止条件,则算法终止,否则更新初始点为$ {\boldsymbol{p}}_{1, k}^{*}, {\boldsymbol{p}}_{2, k}^{*}, \cdots, {\boldsymbol{p}}_{Q, k}^{*} $,
$ {\varsigma _q} = 0.1{\varsigma _q} $,令$j = j + 1$并跳转至步骤(1)。输出:雷达节点对各个目标分配的发射功率结果$ {\boldsymbol{p}}_{1 k}, {\boldsymbol{p}}_{2 k}, \cdots, {\boldsymbol{p}}_{Q k} $。  下载: 导出CSV
下载: 导出CSV
表 1 雷达仿真参数表
Table 1. Radar parameters
参数 数值 采样间隔 2 s 发射信号带宽 2 MHz 发射信号波长 1 m 相关波门系数 8 初始模型概率 ${\mu _0} = [\begin{array}{*{20}{c}} {0.4}&{0.3}&{0.3} \end{array}]$ 天线孔径 10 m 虚警率 10–4 过程噪声强度 1 蒙特卡罗次数 1000 模型转移概率矩阵 ${{\boldsymbol{p}}_{ij}} = \left[ {\begin{array}{*{20}{c}} {0.80}&{0.10}&{0.10} \\ {0.05}&{0.90}&{0.05} \\ {0.05}&{0.05}&{0.90} \end{array}} \right]$
下载: 导出CSV
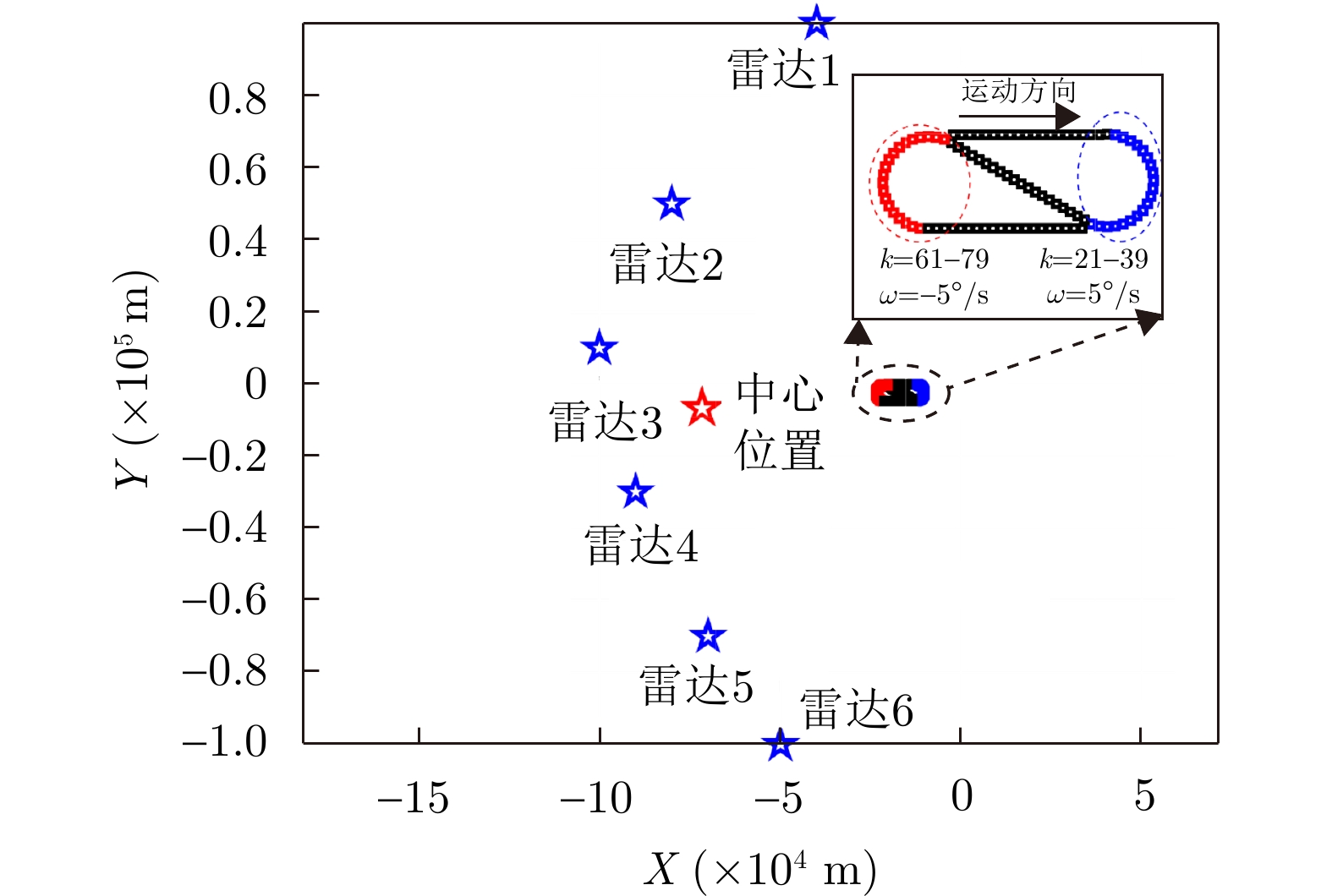
表 2 雷达位置信息表
Table 2. Radar position information
雷达序号 雷达位置信息$(x,y,z)$ 雷达1 $( - 40000\;{\mathrm{m}},100000\;{\mathrm{m}},0\;{\mathrm{m}})$ 雷达2 $( - 80000\;{\mathrm{m}},50000\;{\mathrm{m}},1000\;{\mathrm{m}})$ 雷达3 $( - 100000\;{\mathrm{m}},10000\;{\mathrm{m}},0\;{\mathrm{m}})$ 雷达4 $( - 90000\;{\mathrm{m}}, - 30000\;{\mathrm{m}},0\;{\mathrm{m}})$ 雷达5 $( - 70000\;{\mathrm{m}}, - 70000\;{\mathrm{m}},2000\;{\mathrm{m}})$ 雷达6 $( - 50000\;{\mathrm{m}}, - 100000\;{\mathrm{m}},0\;{\mathrm{m}})$
下载: 导出CSV
表 3 多机动目标状态数据
Table 3. Target parameters
序号 初始状态
(m, m/s, m, m/s, m, m/s)转弯率
$({\omega _1},\,{\omega _2})\;({}^{ \circ }/{\mathrm{s}})$目标1 $ ( - 10000,200,0,0,8000,0) $ (5, –5) 目标2 $(0,60,20000,180,8000,0)$ (3, –3) 目标3 $(5000,60,50000,180,8000,0)$ (3, –5) 目标4 $(10000, - 200, - 30000,0,8000,0)$ (3, –5)
下载: 导出CSV
-
[1] 张明友, 汪学刚. 雷达系统[M]. 5版. 北京: 电子工业出版社, 2018: 359.ZHANG Mingyou and WANG Xuegang. Radar Systems[M]. 5th ed. Beijing: Electronic Industry Press, 2018: 359. [2] ZHANG Haowei, LIU Weijian, ZONG Binfeng, et al. An efficient power allocation strategy for maneuvering target tracking in cognitive MIMO radar[J]. IEEE Transactions on Signal Processing, 2021, 69: 1591–1602. doi: 10.1109/TSP.2020.3047227. [3] 易伟, 袁野, 刘光宏, 等. 多雷达协同探测技术研究进展: 认知跟踪与资源调度算法[J]. 雷达学报, 2023, 12(3): 471–499. doi: 10.12000/JR23036.YI Wei, YUAN Ye, LIU Guanghong, et al. Recent advances in multi-radar collaborative surveillance: Cognitive tracking and resource scheduling algorithms[J]. Journal of Radars, 2023, 12(3): 471–499. doi: 10.12000/JR23036. [4] SU Yang, CHENG Ting, and HE Zishu. LPI-constrained collaborative transmit beampattern optimization and resource allocation for maneuvering targets tracking in colocated MIMO radar network[J]. Signal Processing, 2023, 207: 108935. doi: 10.1016/j.sigpro.2023.108935. [5] LIU Xinghua, XU Zhenhai, DONG Wei, et al. Cognitive resource allocation for target tracking in locationaware radar networks[J]. IEEE Signal Processing Letters, 2020, 27: 650–654. doi: 10.1109/LSP.2020.2987208. [6] YAN Junkun, DAI Jinhui, PU Wenqiang, et al. Quality of service constrained resource allocation scheme for multiple target tracking in radar sensor network[J]. IEEE Systems Journal, 2021, 15(1): 771–779. doi: 10.1109/JSYST.2020.2990409. [7] SHI Chenguang, DAI Xiangrong, WANG Yijie, et al. Joint route optimization and multidimensional resource management scheme for airborne radar network in target tracking application[J]. IEEE Systems Journal, 2022, 16(4): 6669–6680. doi: 10.1109/JSYST.2021.3134657. [8] 宋晓程, 李陟, 任海伟, 等. 目标动态威胁度驱动的分布式组网相控阵雷达资源优化分配算法[J]. 雷达学报, 2023, 12(3): 629–641. doi: 10.12000/JR22240.SONG Xiaocheng, LI Zhi, REN Haiwei, et al. Threat-driven resource allocation algorithm for distributed netted phased array radars[J]. Journal of Radars, 2023, 12(3): 629–641. doi: 10.12000/JR22240. [9] LI Zhengjie, XIE Junwei, LIU Weijian, et al. Joint strategy of power and bandwidth allocation for multiple maneuvering target tracking in cognitive MIMO radar with collocated antennas[J]. IEEE Transactions on Vehicular Technology, 2023, 72(1): 190–204. doi: 10.1109/TVT.2022.3204939. [10] HAN Qinghua, LONG Weijun, YANG Zhen, et al. Resource allocation of netted opportunistic array radar for maneuvering target tracking under uncertain conditions[J]. Remote Sensing, 2024, 16(18): 3499. doi: 10.3390/rs16183499. [11] 时晨光, 唐志诚, 周建江, 等. 非理想检测下多雷达网络节点选择与辐射资源联合优化分配算法[J]. 雷达学报(中英文), 2024, 13(3): 565–583. doi: 10.12000/JR23081.SHI Chenguang, TANG Zhicheng, ZHOU Jianjiang, et al. Joint collaborative radar selection and transmit resource allocation in multiple distributed radar networks with imperfect detection performance[J]. Journal of Radars, 2024, 13(3): 565–583. doi: 10.12000/JR23081. [12] SU Yang, CHENG Ting, and HE Zishu. Joint resource and detection threshold optimization for maneuvering targets tracking in colocated MIMO radar network[J]. IEEE Transactions on Aerospace and Electronic Systems, 2023, 59(5): 5900–5914. doi: 10.1109/TAES.2023.3267336. [13] WANG Dongjia, LIAN Baowang, LIU Yangyang, et al. A cooperative UAV swarm localization algorithm based on probabilistic data association for visual measurement[J]. IEEE Sensors Journal, 2022, 22(20): 19635–19644. doi: 10.1109/JSEN.2022.3202356. [14] YUNITA M, SURYANA J, and IZZUDDIN A. Error performance analysis of IMM-Kalman filter for maneuvering target tracking application[C]. 2020 6th International Conference on Wireless and Telematics (ICWT), Yogyakarta, Indonesia, 2020: 1–6. doi: 10.1109/ICWT50448.2020.9243662. [15] ZHANG Ran, ZUO Lei, WANG Pengfei, et al. IMMPDA algorithm for missile tracking in clutter[C]. 2021 International Conference on Control, Automation and Information Sciences (ICCAIS), Xi’an, China, 2021, 178–182. doi: 10.1109/ICCAIS52680.2021.9624617. [16] WILLETT P, NIU R, and BAR-SHALOM Y. Integration of Bayes detection with target tracking[J]. IEEE Transactions on Signal Processing, 2001, 49(1): 17–29. doi: 10.1109/78.890334. [17] 严俊坤, 王颖萍, 吕进东, 等. 一种多元信息辅助的双基地雷达检测跟踪一体化方法[J]. 电子与信息学报, 2023, 45(4): 1236–1242. doi: 10.11999/JEIT220261.YAN Junkun, WANG Yingping, LÜ Jindong, et al. An integrated detection and tracking algorithm assisted by multi-information for bistatic radar[J]. Journal of Electronics & Information Technology, 2023, 45(4): 1236–1242. doi: 10.11999/JEIT220261. [18] YAN Junkun, HE Tao, MA Lin, et al. Maneuvering resource allocation for coordinated target tracking in airborne radar network[J]. IEEE Transactions on Signal Processing, 2023, 71: 1563–1573. doi: 10.1109/TSP.2023.3265882. [19] 任雪峰, 张卓伟, 胡喆. 基于交互多模型的机动目标定位滤波方法[J]. 雷达与对抗, 2023, 43(4): 19–23. doi: 10.19341/j.cnki.1009-0401.2023.04.005.REN Xuefeng, ZHANG Zhuowei, and HU Zhe. Maneuvering target location and filtering method based on interactive multi-model[J]. Radar & ECM, 2023, 43(4): 19–23. doi: 10.19341/j.cnki.1009-0401.2023.04.005. [20] 严俊坤. 认知雷达中的资源分配算法研究[D]. [博士论文], 西安电子科技大学, 2015.YAN Junkun. Study on resource allocation scheme for cognitive radar[D]. [Ph.D. dissertation], Xidian University, 2015. [21] 李正杰, 谢军伟, 张浩为, 等. 一种低截获背景下的集中式MIMO雷达快速功率分配算法[J]. 雷达学报, 2023, 12(3): 602–615. doi: 10.12000/JR22203.LI Zhengjie, XIE Junwei, ZHANG Haowei, et al. A fast power allocation algorithm in a collocated MIMO radar under low interception backgrounds[J]. Journal of Radars, 2023, 12(3): 602–615. doi: 10.12000/JR22203. [22] ZHANG Chiyu and HWANG I. Multiple maneuvering target tracking using a single unmanned aerial vehicle[J]. Journal of Guidance, Control, and Dynamics, 2019, 42(1): 78–90. doi: 10.2514/1.G002696. [23] YAN Junkun, JIU Bo, LIU Hongwei, et al. Prior knowledge-based simultaneous multibeam power allocation algorithm for cognitive multiple targets tracking in clutter[J]. IEEE Transactions on Signal Processing, 2015, 63(2): 512–527. doi: 10.1109/TSP.2014.2371774. [24] YAN Junkun, LIU Hongwei, JIU Bo, et al. Power allocation algorithm for target tracking in unmodulated continuous wave radar network[J]. IEEE Sensors Journal, 2015, 15(2): 1098–1108. doi: 10.1109/JSEN.2014.2360039. [25] DAI Jinhui, YAN Junkun, PU Wenqiang, et al. Adaptive channel assignment for maneuvering target tracking in multistatic passive radar[J]. IEEE Transactions on Aerospace and Electronic Systems, 2023, 59(3): 2780–2793. doi: 10.1109/TAES.2022.3218610. -


计量
- 文章访问数:
- HTML全文浏览量:
- PDF下载量:
- 被引次数: 0

